Область техники
Изобретение относится к устройству управления для дизельного двигателя с турбонаддувом для автомобиля и, в частности, к устройству управления для дизельного двигателя с турбонаддувом, давление наддува которого является активно управляемым посредством управления частотой вращения турбины с использованием актуатора.
Уровень техники
В дизельном двигателе с турбонагнетателем с регулируемым рабочим объемом, имеющим регулируемое выпускное отверстие, давление наддува является активно управляемым посредством управления частотой вращения турбины через степень открытия регулируемого выпускного отверстия. Следовательно, в дизельном двигателе с турбонаддувом с такой конфигурацией целевое давление наддува определяется на основе частоты вращения двигателя и объема впрыска топлива, и регулируемое выпускное отверстие управляется через управление с обратной связью таким образом, что фактическое давление наддува, которое вычисляется из сигнала датчика давления наддува, становится целевым давлением наддува.
В этой связи, при управлении дизельным двигателем с турбонаддувом, предусмотрены различные ограничения по оборудованию или управлению, ассоциированному с рабочей величиной актуатора и величиной состояния двигателя. Когда эти ограничения не удовлетворяются, имеется вероятность повреждения оборудования или ухудшения рабочих характеристик управления. По меньшей мере, часть этих ограничений ассоциирована с управлением давлением наддува, так что целевое давление наддува, которое используется при управлении с обратной связью, задается равным значению, которое одновременно удовлетворяет этим ограничениям и отклику двигателя.
Тем не менее, задача по адаптации для задания целевого давления наддува для каждой частоты вращения двигателя и каждого объема впрыска топлива, в общем, выполняется при работе в установившемся режиме двигателя. Когда в задачу также включается работа в переходном режиме, при которой увеличивается частота вращения двигателя, трудозатраты, требуемые для задачи по адаптации, являются огромными. Также трудно адаптировать целевое давление наддува без пропуска при допущении всех условий при работе в переходном режиме. Следовательно, когда двигатель работает в переходном режиме, имеется вероятность того, что часть ограничений, ассоциированных с управлением давлением наддува, не удовлетворяется. Одно из таких ограничений представляет собой ограничение, ассоциированное с гарантией надежности по оборудованию. Разность между целевым давлением наддува и фактическим давлением наддува в ходе работы в переходном режиме увеличивается, так что степень открытия регулируемого выпускного отверстия изменяется таким образом, что фактическое давление наддува увеличивается посредством увеличения частоты вращения турбины максимально быстро. В это время давление на выпуске быстро увеличивается при резком изменении степени открытия регулируемого выпускного отверстия, так что имеется вероятность повреждения оборудования, если давление на выпуске чрезмерно увеличивается.
Документ, который раскрывает изобретение, направленное на обеспечение надежности по оборудованию, может представлять собой публикацию заявки на патент Японии №2010-185415 (JP 2010-185415 A). В этой публикации раскрыто изобретение для управления давлением наддува, которое позволяет не допускать перерегулирования давления наддува, которое может возникать в ходе ускорения, в конфигурации, которая управляет степенью открытия регулируемого выпускного отверстия через управление с разомкнутым контуром. Согласно изобретению, раскрытому в этой публикации, в ходе работы в установившемся режиме целевой объем всасываемого воздуха вычисляется на основе частоты вращения двигателя и объема впрыска топлива, и целевая степень открытия регулируемого выпускного отверстия определяется на основе целевого объема всасываемого воздуха. С другой стороны, в ходе ускорения отклонение целевого объема всасываемого воздуха вычисляется на основе отклонения между целевым давлением наддува и фактическим давлением наддува, и сумма отклонения целевого объема всасываемого воздуха и объема всасываемого воздуха вычисляется как целевой объем всасываемого воздуха для управления нагнетателем. Целевая степень открытия регулируемого выпускного отверстия определяется на основе объема всасываемого воздуха для управления нагнетателем.
Тем не менее, ограничения, которые могут не удовлетворяться в ходе работы в переходном режиме, представляют собой не только ограничение, ассоциированное с гарантией надежности по оборудованию. Ограничения касательно управления давлением наддува также включают в себя ограничение, ассоциированное со звуком всасывания, ограничение, ассоциированное с контролируемостью EGR-пропорции, и т.п., и они также могут не удовлетворяться в ходе работы в переходном режиме. Если говорить о звуке всасывания, имеется вероятность возникновения громкого звука всасывания, который достигает ушей пассажира, вследствие резкого изменения давления наддува. Если говорить об контролируемости EGR-пропорции, имеется вероятность снижения контролируемости EGR-пропорции вследствие чрезмерно небольшого перепада давления между давлением на выпуске и давлением наддува. Таким образом, различные ограничения, ассоциированные с управлением давлением наддува, могут не удовлетворяться в ходе работы в переходном режиме; тем не менее, изобретение, раскрытое в вышеуказанной публикации, удовлетворяет только части ограничений, и не предпринимаются меры для решения проблем, ассоциированных с другими ограничениями.
Из вышеописанного очевидно, что когда управление с обратной связью давлением наддува выполняется с использованием регулируемого выпускного отверстия, необходимо принимать некоторые меры для удовлетворения различным ограничениям, ассоциированным с управлением давлением наддува даже при работе в переходном режиме. При этих мерах, разумеется, задача по адаптации, которая требует огромных трудозатрат, становится необязательной, либо трудозатраты должны быть уменьшены в максимально возможной степени, если требуется задача по адаптации. Поскольку состояние управления давлением наддува, которое может приниматься в один момент времени, более конкретно, степень открытия регулируемого выпускного отверстия, которая может приниматься в один момент времени, является только одним состоянием, не всегда возможно удовлетворять всем ограничениям одновременно. Таким образом, когда существует множество ограничений, которые должны удовлетворяться, важная цель заключается в том, чтобы определять то, какому ограничению присвоен приоритет.
Патентные документы
Патентный документ 1: Публикация заявки на патент Японии №2010-185415 (JP 2010-185415 A).
Сущность изобретения
Задача изобретения заключается в том, чтобы позволить удовлетворять различным ограничениям, ассоциированным с управлением давлением наддува, в ходе работы в переходном режиме в дизельном двигателе с турбонаддувом, давление наддува которого является активно управляемым через работу актуатора. Для решения задачи устройство управления для дизельного двигателя с турбонаддувом согласно изобретению выполнено с возможностью осуществления следующей операции.
Согласно одному аспекту изобретения, устройство управления вычисляет фактическое давление наддува двигателя из сигнала датчика давления наддува и вычисляет целевое значение (в дальнейшем в этом документе установившееся целевое значение) давления наддува в ходе работы в установившемся режиме на основе частоты вращения двигателя и объема впрыска топлива. Актуатор для управления давлением наддува управляется через управление с обратной связью таким образом, что фактическое давление наддува приближается к установившемуся целевому значению. Актуатор для управления давлением наддува включает в себя регулируемое выпускное отверстие для турбонагнетателя с регулируемым рабочим объемом и запорный клапан регулирования давления наддува. Вышеуказанная операция, которая выполняется посредством устройства управления, является операцией, которая выполняется независимо от установившегося режима работы или переходного режима работы. Тем не менее, когда выбирается переходное целевое значение, описанное ниже, устройство управления изменяет целевое значение управления с обратной связью с установившегося целевого значения на выбранное переходное целевое значение.
Когда удовлетворяется любое условие из множества различных условий, которые могут удовлетворяться в ходе работы в переходном режиме, устройство управления вычисляет целевое значение (в дальнейшем в этом документе переходное целевое значение) давления наддува, подходящее для удовлетворяемого условия, в соответствии с правилом вычисления, подготовленным для каждого условия. Каждое условие ассоциировано с любым из ограничений, ассоциированных с управлением давлением наддува. Таким образом, вышеуказанное множество условий, например, включает в себя условие, ассоциированное с давлением на выпуске и скоростью изменения давления на выпуске, условие, ассоциированное со скоростью изменения давления наддува, условие, ассоциированное с перепадом давления между давлением на выпуске и давлением наддува, и т.п. Устройство управления определяет порядок приоритетов для множества условий на основе значения предварительно определенной физической величины, ассоциированной с ускорением. Когда существует одно переходное целевое значение, выбирается переходное целевое значение, а когда одновременно существуют множество переходных целевых значений, выбирается одно из переходных целевых значений в соответствии с порядком приоритетов.
Поскольку устройство управления работает так, как описано выше, в случае, когда любое из ограничений, ассоциированных с управлением давлением наддува, не удовлетворяется, целевое значение управления с обратной связью изменяется на переходное целевое значение, которое удовлетворяет ограничению. В случае, когда множество ограничений, ассоциированных с управлением давлением наддува, не удовлетворяются, целевое значение управления с обратной связью изменяется на переходное целевое значение, которое удовлетворяет ограничению, имеющему более высокий приоритет. Поскольку порядок приоритетов для ограничений изменяется на основе ускорения, достигается оптимальное управление давлением наддува на основе переходной ситуации. При использовании устройства управления необязательно выполнять задачу по адаптации с огромными трудозатратами для каждого условия при работе в переходном режиме в процессе создания управляющей программы, так что функции управления с обратной связью не усложняются.
Краткое описание чертежей
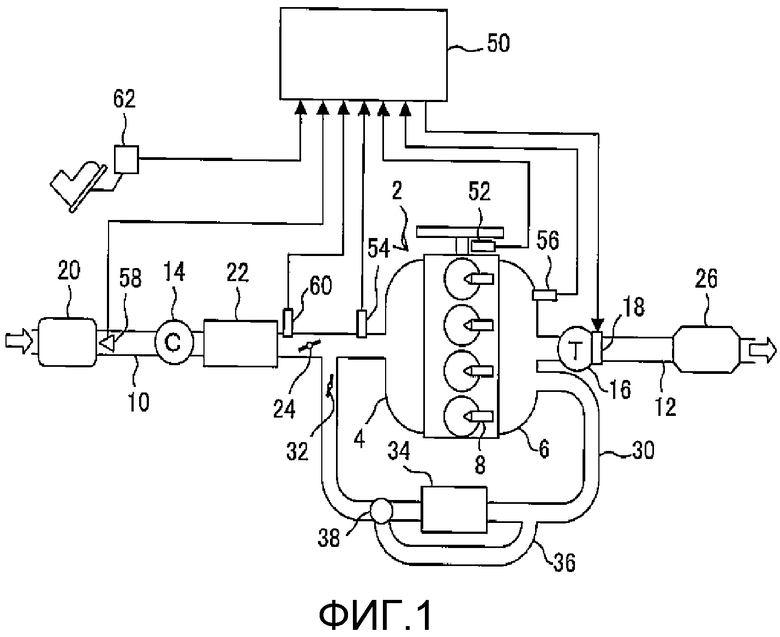
Фиг.1 является блок-схемой, которая показывает конфигурацию системы двигателя согласно варианту осуществления изобретения.
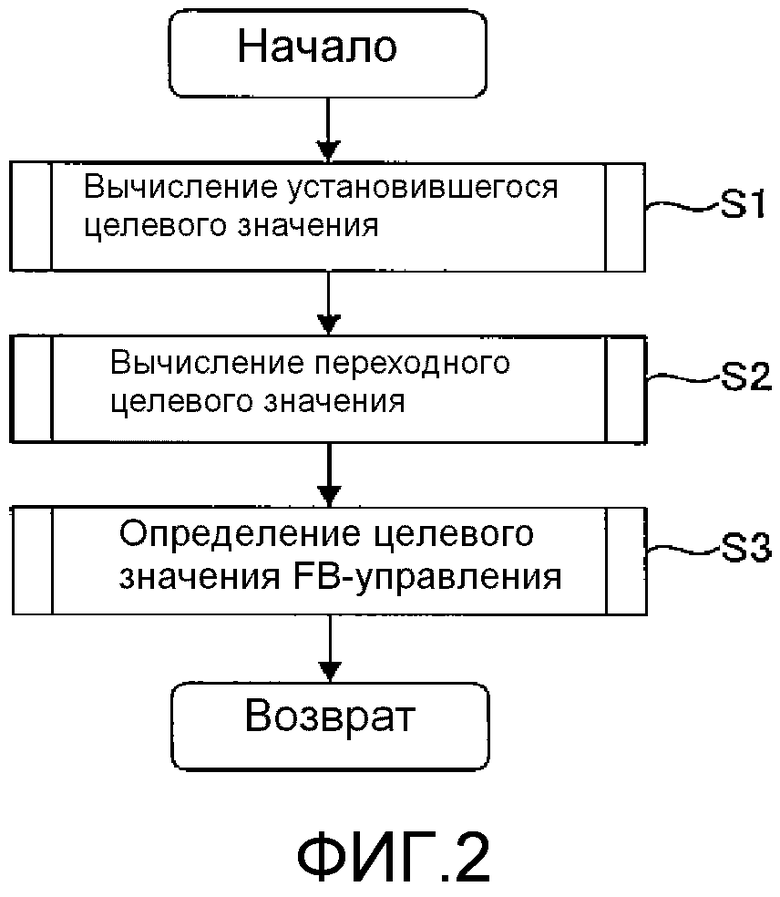
Фиг.2 является блок-схемой последовательности операций способа, которая показывает процедуру для управления давлением наддува, которая выполняется посредством устройства управления согласно варианту осуществления изобретения.
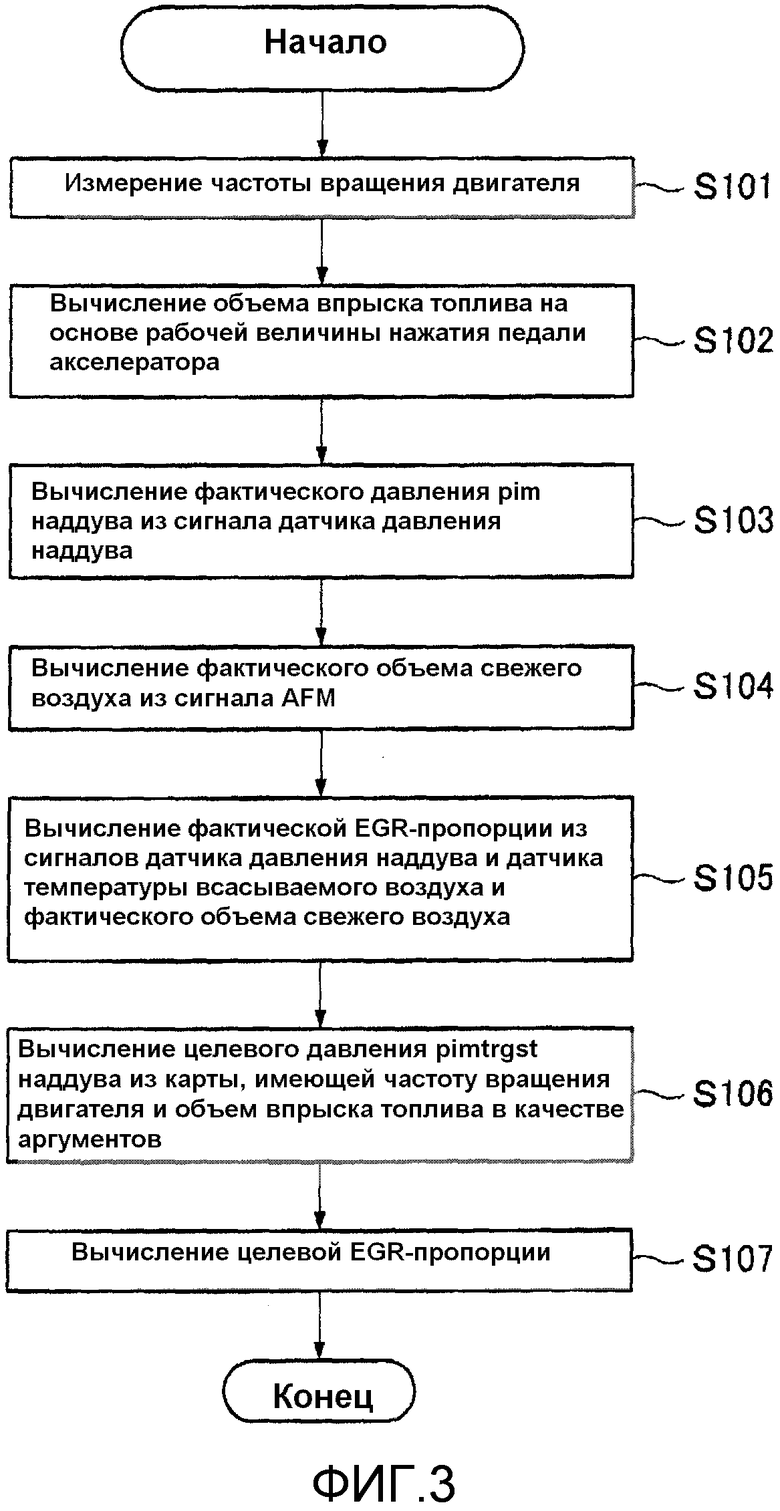
Фиг.3 является блок-схемой последовательности операций способа, которая показывает процедуру для вычисления установившегося целевого значения, которая выполняется посредством устройства управления согласно варианту осуществления изобретения.
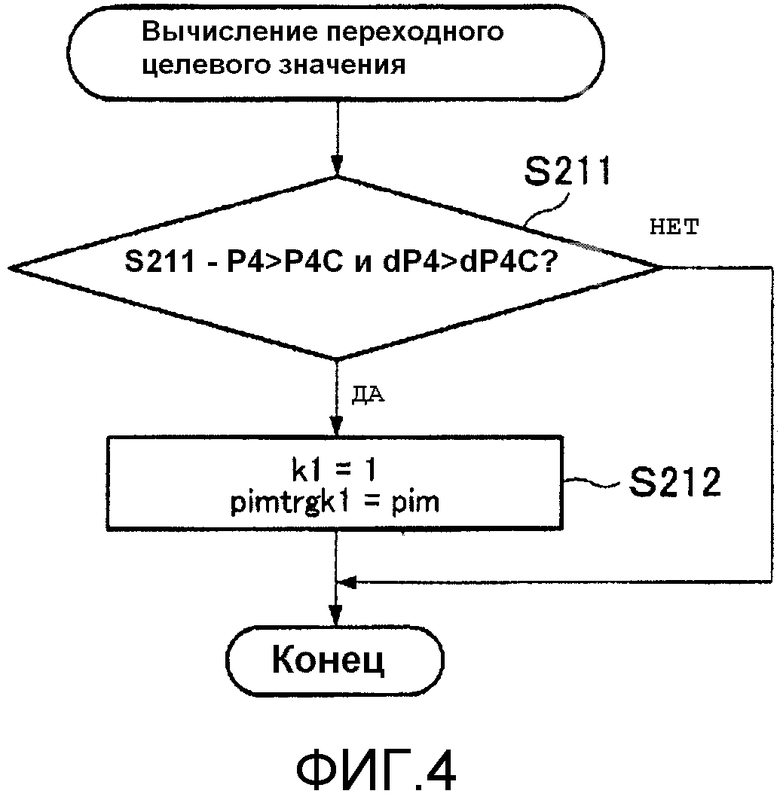
Фиг.4 является блок-схемой последовательности операций способа, которая показывает процедуру для вычисления переходного целевого значения, которое удовлетворяет ограничению, ассоциированному с гарантией надежности по оборудованию, которая выполняется посредством устройства управления согласно варианту осуществления изобретения.
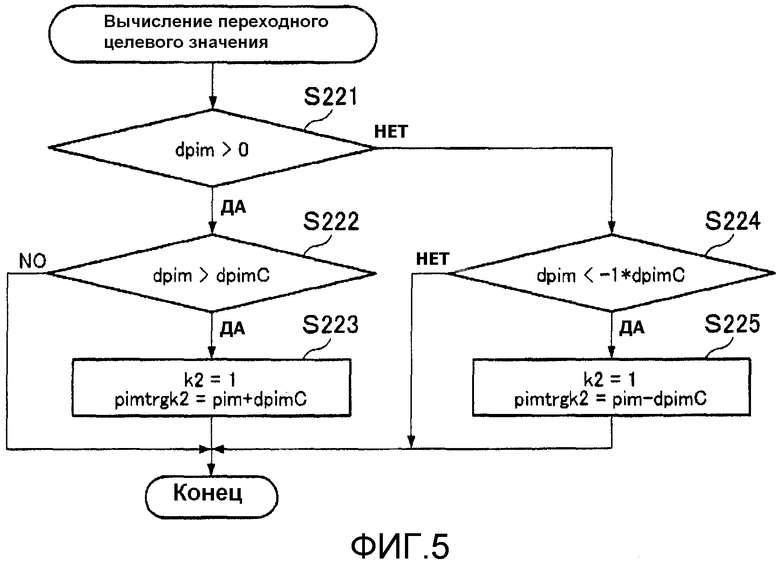
Фиг.5 является блок-схемой последовательности операций способа, которая показывает процедуру для вычисления переходного целевого значения, которое удовлетворяет ограничению, ассоциированному со звуком всасывания, которая выполняется посредством устройства управления согласно варианту осуществления изобретения.
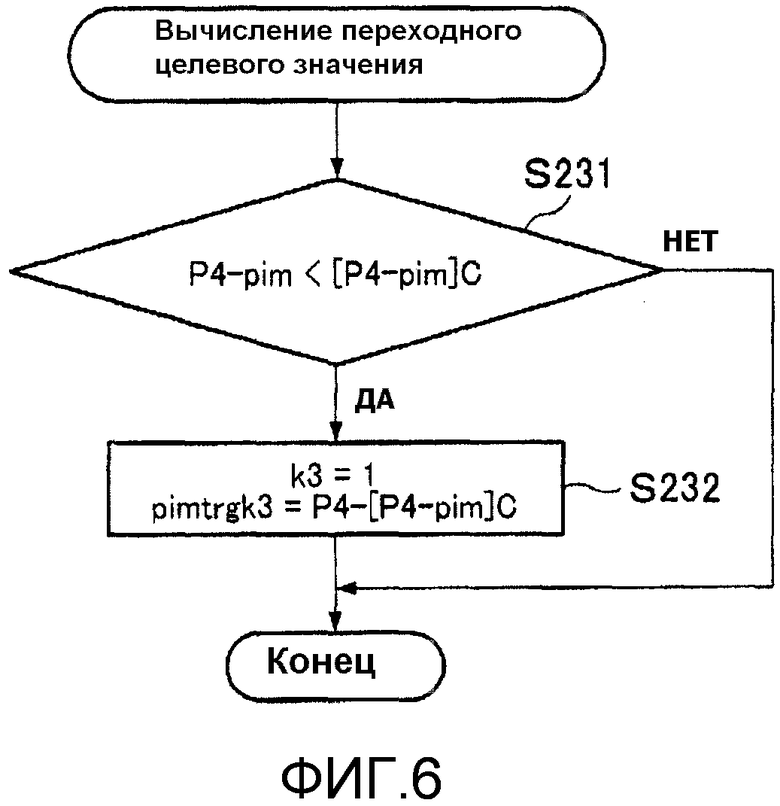
Фиг.6 является блок-схемой последовательности операций способа, которая показывает процедуру для вычисления переходного целевого значения, которое удовлетворяет ограничению, ассоциированному с контролируемостью EGR-пропорции, которая выполняется посредством устройства управления согласно варианту осуществления изобретения.
Фиг.7 является блок-схемой последовательности операций способа, которая показывает процедуру для определения целевого значения управления с обратной связью, которая выполняется посредством устройства управления согласно варианту осуществления изобретения.
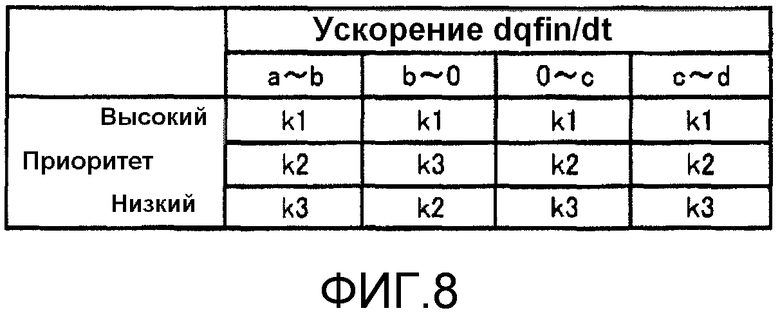
Фиг.8 является видом, который показывает пример таблицы для определения уровня приоритета каждого переходного целевого значения на основе ускорения.
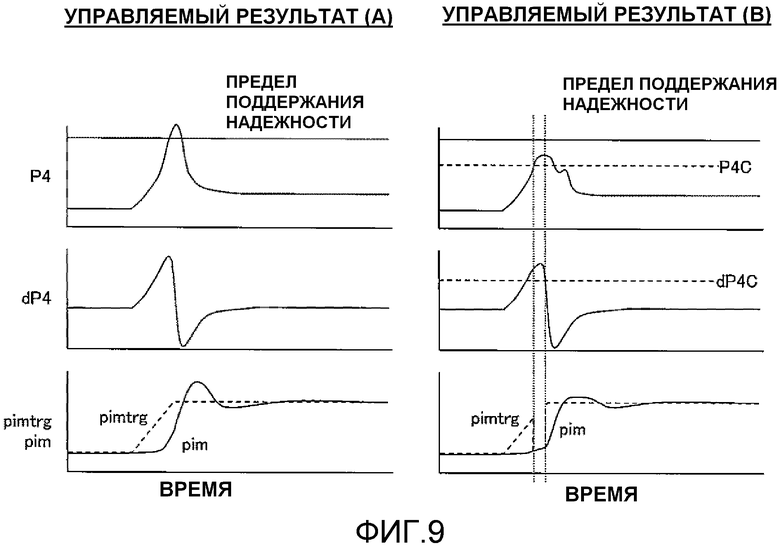
Фиг.9 является видом, который показывает результаты, управляемые посредством устройства управления согласно варианту осуществления изобретения.
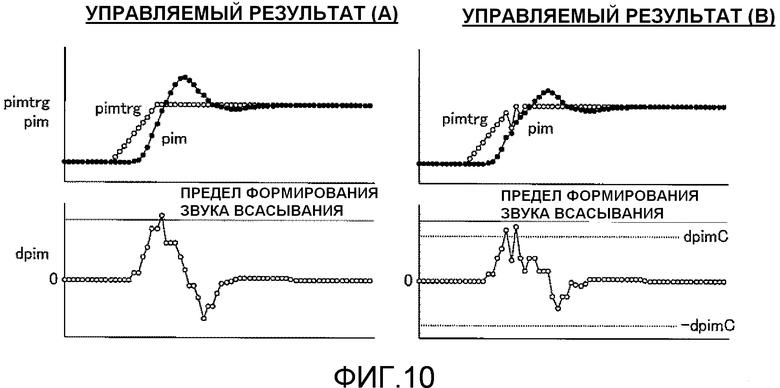
Фиг.10 является видом, который показывает результаты, управляемые посредством устройства управления согласно варианту осуществления изобретения.
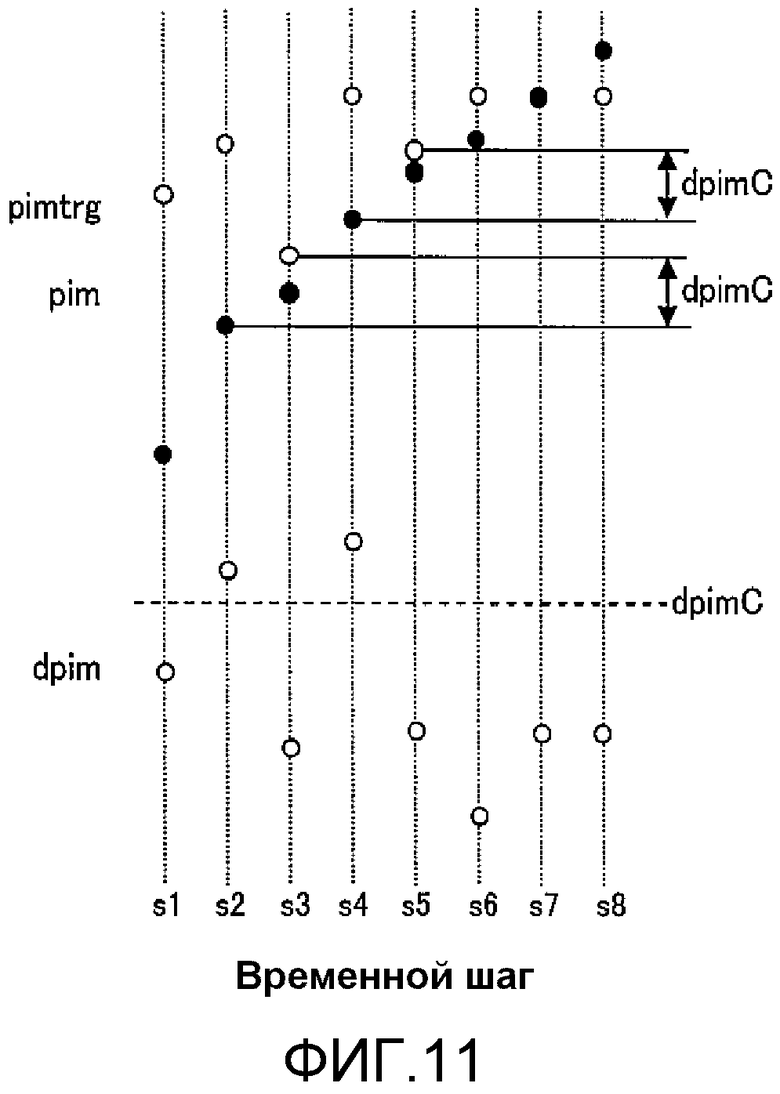
Фиг.11 является видом, который подробно показывает управляемые результаты, показанные на фиг.10.
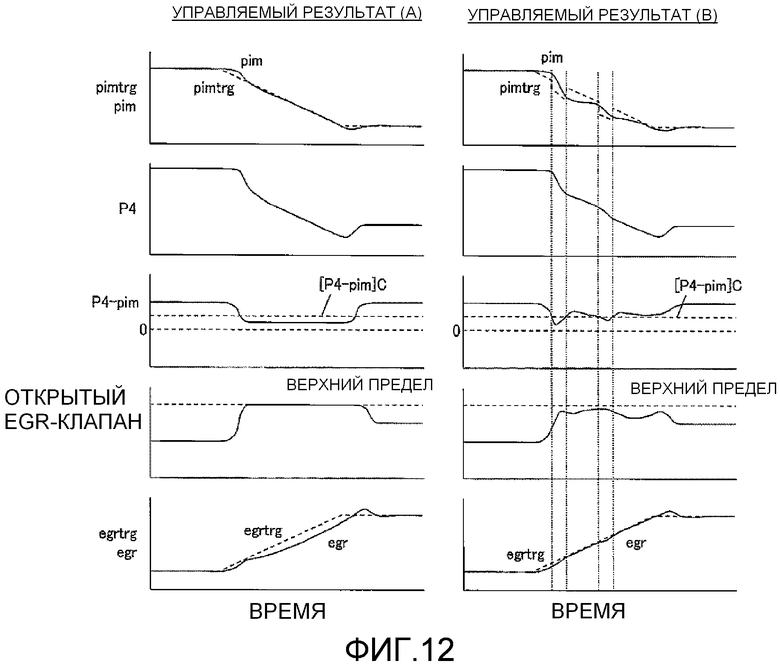
Фиг.12 является видом, который показывает результаты, управляемые посредством устройства управления согласно варианту осуществления изобретения.
Способы осуществления изобретения
Далее описывается вариант осуществления изобретения со ссылкой на чертежи.
Фиг.1 является видом, который показывает конфигурацию системы двигателя согласно варианту осуществления изобретения. Двигатель согласно настоящему варианту осуществления является дизельным двигателем с турбонаддувом (в дальнейшем в этом документе называется просто "двигателем"). Четыре цилиндра предоставляются в ряд в блоке 2 двигателя, и инжекторы 8 предоставляются для каждого цилиндра. Впускной коллектор 4 и выпускной коллектор 6 соединяются с блоком 2 двигателя. Впускной канал 10 соединяется с впускным коллектором 4. Свежий воздух, принимаемый из воздушного фильтра 20, протекает через впускной канал 10. Компрессор 14 турбонагнетателя устанавливается во впускном канале 10. Дизельный дроссель 24 предоставляется во впускном канале 10 в участке после компрессора 14. Промежуточный охладитель 22 предоставляется во впускном канале 10 между компрессором 14 и дизельным дросселем 24. Выпускной канал 12 соединяется с выпускным коллектором 6. Выпускной канал 12 используется для того, чтобы высвобождать выхлопной газ, испускаемый из блока 2 двигателя, в атмосферу. Турбина 16 турбонагнетателя устанавливается в выпускном канале 12. Турбонагнетатель согласно настоящему варианту осуществления представляет собой тип нагнетателя с регулируемым рабочим объемом, и регулируемое выпускное отверстие 18 предоставляется в турбине 16. Устройство 26 катализатора предоставляется в выпускном канале 12 в участке ниже турбины 16. Устройство 26 катализатора используется для того, чтобы очищать выхлопной газ.
Двигатель согласно настоящему варианту осуществления включает в себя EGR-устройство, которое обеспечивает рециркуляцию выхлопного газа из системы выпуска выхлопных газов в систему впуска. EGR-устройство соединяет местоположение после дизельного дросселя 24 во впускном канале 10 с выпускным коллектором 6 через EGR-канал 30. EGR-клапан 32 предоставляется в EGR-канале 30. EGR-охладитель 34 предоставляется в EGR-канале 30 на стороне выпуска EGR-клапана 32. Обводной канал 36 предоставляется в EGR-канале 30. Обводной канал 36 перепускает EGR-охладитель 34. Перепускной клапан 38 предоставляется в участке, в котором пересекаются EGR-канал 30 и обводной канал 36. Перепускной клапан 38 изменяет направление, в котором протекает выхлопной газ.
Система двигателя согласно настоящему варианту осуществления включает в себя электронный модуль 50 управления (ЭМУ). ЭМУ 50 является устройством управления, которое выполняет интегрированное управление всей системой двигателя. ЭМУ 50 выполняет процесс получения сигналов датчиков, предоставленных в системе двигателя. Датчики устанавливаются в участках системы двигателя. Например, расходомер 58 воздуха устанавливается во впускном канале 10 в участке после воздушного фильтра 20, датчик 60 температуры всасываемого воздуха устанавливается около выпускного отверстия промежуточного охладителя 22 во впускном канале 10, и датчик 54 давления наддува устанавливается во впускном канале 10 в участке ниже дизельного дросселя. Датчик 56 давления на выпуске устанавливается в выпускном коллекторе 6. Помимо этого, также устанавливаются датчик 52 частоты вращения, который обнаруживает вращение коленчатого вала, датчик 62 рабочей величины нажатия педали акселератора, который выводит сигнал, соответствующий рабочей величине нажатия педали акселератора, и т.п. ЭМУ 50 управляет актуаторами в соответствии с предварительно определенной управляющей программой посредством обработки полученных сигналов датчиков. Актуаторы, которые управляются посредством ЭМУ 50, включают в себя регулируемое выпускное отверстие 18, инжекторы 8, EGR-клапан 32, дизельный дроссель 24 и т.п. Предусмотрено большое число актуаторов и датчиков, соединенных с ЭМУ 50, помимо актуаторов и датчиков, показанных на чертеже; тем не менее, их пояснение опускается в подробном описании.
Управление двигателем, которое выполняется посредством ЭМУ 50, включает в себя управление давлением наддува и EGR-управление. При управлении давлением наддува согласно настоящему варианту осуществления регулируемое выпускное отверстие 18 управляется через управление с обратной связью таким образом, что фактическое давление наддува, вычисленное из сигнала датчика 54 давления наддува, становится целевым давлением наддува. При EGR-управлении EGR-клапан 32 управляется через управление с обратной связью таким образом, что фактическая EGR-пропорция, вычисленная из сигналов различных датчиков, становится целевой EGR-пропорцией. В числе этих средств управления двигателем в настоящем варианте осуществления конкретным характерным управлением является управление давлением наддува. Тем не менее, при осуществлении изобретения отсутствуют ограничения на конкретный способ для управления с обратной связью при управлении давлением наддува. В настоящем варианте осуществления предполагается, что PID-управление на основе разности между фактическим значением и целевым значением выполняется как при управлении давлением наддува, так и при EGR-управлении. Управление давлением наддува, которое выполняется в настоящем варианте осуществления, имеет признак в способе определения целевого давления наддува. В дальнейшем в этом документе это описывается со ссылкой на блок-схему последовательности операций способа.
Блок-схема последовательности операций способа, показанная на фиг.2, показывает процедуру для управления давлением наддува, которая выполняется посредством ЭМУ 50 в настоящем варианте осуществления. В этой процедуре также выполняется EGR-управление. Процедура управления давлением наддува формируется из этапа S1 вычисления установившегося целевого значения, этапа S2 вычисления переходного целевого значения и этапа S3 определения целевого значения, которое в итоге используется при управлении с обратной связью (целевого значения FB-управления). Вложенная процедура (описана ниже) выполняется на каждом этапе.
Блок-схема последовательности операций способа, показанная на фиг.3, показывает вложенную процедуру, которая выполняется на этапе S1 процедуры управления давлением наддува. В этой вложенной процедуре установившиеся целевые значения, соответственно, вычисляются для давления наддува и EGR-пропорции. Установившиеся целевые значения означают целевые значения, которые определяются посредством использования данных, которые адаптируются при работе в установившемся режиме двигателя.
На этапе S101 этой вложенной процедуры частота вращения двигателя измеряется из сигнала датчика 52 частоты вращения. На этапе S102 объем впрыска топлива вычисляется на основе рабочей величины нажатия педали акселератора, полученной из сигнала датчика 62 рабочей величины нажатия педали акселератора. На этапе S103 фактическое давление наддува вычисляется из сигнала датчика 54 давления наддува. В нижеприведенном описании фактическое давление наддува может обозначаться посредством pim. На этапе S104 фактический объем свежего воздуха вычисляется из сигнала расходомера 58 воздуха. Фактический объем свежего воздуха является объемом свежего воздуха, который фактически вовлекается в цилиндры. На этапе S105 фактическая EGR-пропорция вычисляется из сигналов датчика 54 давления наддува и датчика 60 температуры всасываемого воздуха и фактического объема свежего воздуха. Процессы вышеуказанных этапов являются процессами для получения данных, требуемых для того, чтобы вычислять установившиеся целевые значения. Таким образом, последовательность этапов может быть изменена при необходимости.
Вычисление установившихся целевых значений выполняется на этапе S106 и этапе S107. На этапе S106 целевое давление наддува вычисляется из карты, имеющей частоту вращения двигателя и объем впрыска топлива в качестве аргументов. Целевое давление наддува, вычисленное на этом этапе, является целевым значением, адаптированным при работе в установившемся режиме двигателя, т.е. установившимся целевым значением давления наддува. Карта, которая используется для того, чтобы вычислять установившееся целевое значение, формируется на основе адаптированных данных, полученных через тест при работе в установившемся режиме, в то время как частота вращения двигателя и объем впрыска топлива варьируются по постоянным значениям. В нижеприведенном описании установившееся целевое значение давления наддува может обозначаться посредством pimtrgst. На этапе S107 целевая EGR-пропорция вычисляется на основе объема свежего воздуха. Корреляция между объемом свежего воздуха и целевой EGR-пропорцией определяется таким образом, что концентрация кислорода воздуха, который вовлечен в цилиндры, становится намеченным значением в диапазоне, в котором EGR-пропорция не превышает предел, при котором (ниже которого) не образуется дым. Целевая EGR-пропорция, которая вычисляется на этом этапе, является целевым значением, адаптированным при работе в установившемся режиме двигателя, т.е. установившимся целевым значением EGR-пропорции. Могут вычисляться как значение, которое достигает намеченной концентрации кислорода во всасываемом воздухе, так и значение, которое становится пределом дымления двигателя, и меньшее из значений может задаваться для целевой EGR-пропорции.
На этапе S2 процедуры управления давлением наддува выполняются вложенные процедуры, показанные на блок-схемах последовательности операций способа по фиг 4, фиг.5 и фиг.6. Вложенные процедуры могут быть выполнены последовательно в предварительно определенной последовательности или могут быть выполнены параллельно друг другу. В этих вложенных процедурах вычисляются переходные целевые значения давления наддува. Переходные целевые значения представляют собой целевое значение, которое задается только тогда, когда удовлетворяется предварительно определенное условие, которое может удовлетворяться в ходе работы в переходном режиме двигателя. Установившееся целевое значение давления наддува, которое вычисляется на этапе S1 процедуры управления давлением наддува, определяется для случая, в котором двигатель работает в установившемся режиме. Следовательно, в ходе работы в установившемся режиме, к примеру, в ходе ускорения и в ходе замедления, некоторые ограничения, ассоциированные с управлением давлением наддува, могут не удовлетворяться. При управлении давлением наддува согласно настоящему варианту осуществления важный вопрос заключается в ограничении, ассоциированном с гарантией надежности по оборудованию, ограничении, ассоциированном со звуком всасывания, и ограничении, ассоциированном с контролируемостью EGR-пропорции. Вложенные процедуры для вычисления переходных целевых значений формируются в соответствии "один-к-одному" с этими ограничениями. В каждой вложенной процедуре факт того, что ограничение не удовлетворяется, прогнозируется на основе того, удовлетворяется или нет предварительно определенное условие. Только тогда, когда факт того, что ограничение не удовлетворяется, прогнозируется, целевое значение давления наддува, которое надежно удовлетворяет ограничению, вычисляется как переходное целевое значение.
Вложенная процедура, показанная на фиг.4, является вложенной процедурой для вычисления переходного целевого значения, которое удовлетворяет ограничению, ассоциированному с гарантией надежности по оборудованию. Ограничение, ассоциированное с гарантией надежности по оборудованию, является конкретным ограничением для предотвращения повреждения системы выпуска выхлопных газов, которое возникает вследствие чрезмерного давления на выпуске. На этапе S211 этой вложенной процедуры определяется то, удовлетворяется или нет условие, связанное с давлением на выпуске и скоростью изменения давления на выпуске. Условие состоит в том, что фактическое давление P4 на выпуске, измеряемое посредством датчика 56 давления на выпуске, выше предварительно определенного опорного давления P4C на выпуске, и скорость dP4 изменения фактического давления на выпуске превышает предварительно определенную опорную скорость dP4C изменения давления на выпуске. Опорное давление P4C на выпуске задается равным значению ниже конструктивного предела, при котором (или ниже которого) гарантируется надежность оборудования системы выпуска выхлопных газов. Опорная скорость dP4C изменения давления на выпуске определяется на основе допуска по опорному давлению P4C на выпуске для предела гарантии надежности и скорости реакции управления давлением наддува. Когда увеличивается допуск по опорному давлению P4C на выпуске для предела гарантии надежности, разрешается увеличение значения опорной скорости dP4C изменения давления на выпуске. Тем не менее, поскольку опорное давление P4C на выпуске задается равным значению, близкому к пределу гарантии надежности, опорная скорость dP4C изменения давления на выпуске должна быть меньшим значением. Когда условие этапа S211 удовлетворяется, прогнозируется то, что давление на выпуске превысит предел гарантии надежности в ближайшем будущем. Когда условие этапа S211 удовлетворяется, выполняется процесс этапа S212. На этапе S212 значение pim фактического давления наддува, вычисленное из сигнала датчика 54 давления наддува, задается в качестве переходного целевого значения pimtrgk1 давления наддува, так что текущее давление наддува сохраняется как есть. Значение флага k1, которое указывает то, что задано переходное целевое значение для гарантии надежности по оборудованию, задается равным 1.
Вложенная процедура, показанная на фиг.5, является вложенной процедурой для вычисления переходного целевого значения, которое удовлетворяет ограничению, ассоциированному со звуком всасывания. Ограничение, ассоциированное со звуком всасывания, является конкретным ограничением для предотвращения возникновения звука всасывания при резком изменении давления наддува. На этапе S221 этой вложенной процедуры определяется то, является или нет скорость dpim изменения давления наддува, измеряемого посредством датчика 54 давления наддува, положительным значением. Скорость изменения давления наддува здесь означает величину варьирования давления наддува в расчете на временной шаг (например, интервал регулирования двигателя) управления давлением наддува. Когда скорость dpim изменения давления наддува является положительным значением, двигатель находится в состоянии ускорения; тогда как, когда скорость dpim изменения давления наддува является отрицательным значением, двигатель находится в состоянии замедления. Когда скорость dpim изменения давления наддува является положительным значением, на этапе S222 определяется то, превышает или нет скорость dpim изменения давления наддува предварительно определенную опорную скорость dpimC изменения давления наддува. Опорная скорость dpimC изменения давления наддува задается равной значению, которое является положительным значением и которое меньше предельного значения скорости изменения давления наддува, при котором (или выше которого) формируется звук всасывания. Иными словами, опорная скорость dpimC изменения давления наддува задается равной значению, при котором не гарантируется формирование звука всасывания. Таким образом, когда скорость dpim изменения давления наддува превышает опорную скорость dpimC изменения давления наддува, прогнозируется то, что скорость изменения давления наддува превысит предел формирования звука всасывания в ближайшем будущем. Когда условие этапа S222 удовлетворяется, выполняется процесс этапа S223. На этапе S223 значение, полученное посредством суммирования опорной скорости dpimC изменения давления наддува со значением pim фактического давления наддува, вычисленным из сигнала датчика 54 давления наддува, задается для переходного целевого значения pimtrgk2 давления наддува. Значение флага k2, которое указывает то, что задано переходное целевое значение для предотвращения формирования звука всасывания, задается равным 1. С другой стороны, в качестве результата определения этапа S221, когда скорость dpim изменения давления наддува является отрицательным значением, на этапе S224 определяется то, меньше или нет скорость dpim изменения давления наддува значения, полученного посредством умножения опорной скорости dpimC изменения давления наддува на -1". Когда условие этапа S224 удовлетворяется, выполняется процесс этапа S225. На этапе S225 значение, полученное посредством вычитания опорной скорости dpimC изменения давления наддува из значения pim фактического давления наддува, вычисленного из сигнала датчика 54 давления наддува, задается для переходного целевого значения pimtrgk2 давления наддува. Значение флага k2, которое указывает то, что задано переходное целевое значение для предотвращения формирования звука всасывания, задается равным 1.
Вложенная процедура, показанная на фиг.6, является вложенной процедурой для вычисления переходного целевого значения, которое удовлетворяет ограничению, ассоциированному с контролируемостью EGR-пропорции. Ограничение, ассоциированное с контролируемостью EGR-пропорции, является конкретным ограничением для гарантирования контролируемости EGR-пропорции посредством обеспечения достаточного перепада давления между давлением на выпуске и давлением наддува. На этапе S231 этой вложенной процедуры вычисляется перепад давления между фактическим давлением P4 на выпуске, вычисленным из сигнала датчика 56 давления на выпуске, и фактическим давлением pim наддува, вычисленным из сигнала датчика 54 давления наддува. Определяется то, ниже или нет перепад давления предварительно определенного опорного перепада [P4-pim]C давления. Достаточный перепад давления между фактическим давлением P4 на выпуске и фактическим давлением pim наддува является важным требованием при EGR-управлении. При EGR-управлении степень открытия EGR-клапана 32 изменяется через управление с обратной связью таким образом, что фактическая EGR-пропорция становится целевой EGR-пропорцией; тем не менее, когда нет достаточного перепада давления между передней и задней сторонами EGR-клапана 32, невозможно управлять EGR-пропорцией независимо от того, как управляется EGR-клапан 32.
Вышеуказанный опорный перепад [P4-pim]C давления является положительным значением и задается равным значению перепада давления, при котором гарантируется контролируемость EGR-пропорции посредством EGR-клапана 32. Таким образом, когда перепад давления между фактическим давлением P4 на выпуске и фактическим давлением pim наддува меньше [P4-pim]C, имеется вероятность того, что невозможно обеспечивать достаточный перепад давления для гарантирования контролируемости EGR-пропорции. Когда условие этапа S231 удовлетворяется, выполняется процесс этапа S232. На этапе S232 значение, полученное посредством вычитания опорного перепада [P4-pim]C давления из фактического давления P4 на выпуске, вычисленного из сигнала датчика 56 давления на выпуске, задается для переходного целевого значения pimtrgk3 давления наддува. Значение флага k3, которое указывает то, что задано переходное целевое значение для гарантирования контролируемости EGR-пропорции, задается равным 1.
Далее описывается вложенная процедура, которая выполняется на этапе S3 процедуры управления давлением наддува. В зависимости от рабочего режима двигателя, в ходе работы в переходном режиме множество ограничений, ассоциированных с управлением давлением наддува, не могут удовлетворяться одновременно. В таком случае, на вышеуказанном этапе S2, переходное целевое значение задается для каждого ограничения, которое не может удовлетворяться. В этой связи невозможно полностью и одновременно достигать всех из множества переходных целевых значений. Следовательно, требуется процесс выбора одного переходного целевого значения из множества переходных целевых значений, т.е. координации переходных целевых значений. В этом процессе координации определяется то, какому ограничению присвоен более высокий приоритет при работе в текущем переходном режиме, и выбирается переходное целевое значение, которое удовлетворяет ограничению, которому присвоен более высокий приоритет. Физическая величина, ассоциированная с ускорением, используется в качестве информации, которая указывает переходную ситуацию. Ускорение является информацией, которая указывает то, насколько текущий рабочий режим отклоняется от работы в установившемся режиме. Физическая величина, ассоциированная с ускорением, может быть непосредственно ускорением. Ускорение может быть вычислено из скорости транспортного средства или частоты вращения двигателя, либо может непосредственно измеряться посредством датчика ускорения. Тем не менее, предпочтительная физическая величина, ассоциированная с ускорением, является величиной варьирования объема впрыска топлива за небольшое время, т.е. скоростью изменения объема впрыска топлива. Когда скорость изменения объема впрыска топлива является положительным значением, частота вращения двигателя увеличивается с увеличением энергии сгорания, и транспортное средство ускоряется. С другой стороны, когда скорость изменения объема впрыска топлива является отрицательным значением, частота вращения двигателя снижается с уменьшением энергии сгорания, и транспортное средство замедляется. Иными словами, можно прогнозировать ускорение в будущем из скорости изменения объема впрыска топлива. Когда порядок приоритетов для ограничений определяется на основе скорости изменения объема впрыска топлива, возможно, что оптимальное управление давлением наддува выполняется в ответ на текущую переходную ситуацию без задержки в варьировании в переходной ситуации.
Блок-схема последовательности операций способа, показанная на фиг.7, показывает вложенную процедуру, которая выполняется на этапе S3 процедуры управления давлением наддува. На первом этапе S301 этой вложенной процедуры вычисляется скорость dqfin/dt изменения объема впрыска топлива, которая является физической величиной, ассоциированной с ускорением. Объем qfin впрыска топлива вычисляется из рабочей величины нажатия педали акселератора на этапе S102 вложенной процедуры, показанной на фиг.3. На следующем этапе S302 порядок приоритетов для ограничений определяется из скорости dqfin/dt изменения объема впрыска топлива на основе подготовленной таблицы порядка приоритетов. Фиг.8 показывает пример таблицы порядка приоритетов. В этом примере значения скорости dqfin/dt изменения объема впрыска топлива разделяются на четыре области, и порядок приоритетов для ограничений задается для каждой области. Например, когда значение dqfin/dt попадает в область замедления от b, имеющего отрицательное значение, до 0, порядок приоритетов представляет собой k1, k3, k2 в порядке по убыванию приоритета. Когда значение dqfin/dt попадает в область ускорения от 0 до c, имеющего положительное значение, порядок приоритетов представляет собой k1, k2, k3 в порядке по убыванию приоритета; k1 является флагом, соответствующим ограничению, ассоциированному с гарантией надежности по оборудованию, k2 является флагом, соответствующим ограничению, ассоциированному со звуком всасывания, и k3 является флагом, соответствующим ограничению, ассоциированному с контролируемостью EGR-пропорции. В нижеприведенном описании порядок приоритетов представляет собой порядок k1, k2, k3 в качестве примера.
На этапе S303 определяется то, задается или нет значение флага, соответствующего ограничению, имеющему наивысший приоритет, равным 1. Согласно порядку приоритетов вышеприведенного примера, здесь определяется то, задается или нет значение флага k1, равным 1; факт того, что значение флага k1 равно 1, означает то, что переходное целевое значение для гарантии надежности по оборудованию задается. Таким образом, когда значение флага k1 равно 1, выбирается процесс этапа S304. На этапе S304 переходное целевое значение pimtrgk1 давления наддува, вычисленное во вложенной процедуре, показанной на фиг.4, определяется в качестве целевого значения pimtrg FB-управления. Таким образом, быстрое увеличение давления на выпуске в ходе работы в переходном режиме подавляется, и надежность оборудования системы выпуска выхлопных газов гарантируется.
Когда результат определения этапа S303 является отрицательным, выбирается процесс этапа S305. На этапе S305 определяется то, задается или нет значение флага, соответствующего ограничению, имеющему второй наивысший приоритет, равным 1. Согласно порядку приоритетов вышеприведенного примера, здесь определяется то, задается или нет значение флага k2, равным 1. Факт того, что значение флага k2 равно 1, означает то, что переходное целевое значение для предотвращения формирования звука всасывания задается. Таким образом, когда значение флага k2 равно 1, выбирается процесс этапа S306. На этапе S306 переходное целевое значение pimtrgk2 давления наддува, вычисленное во вложенной процедуре, показанной на фиг.5, определяется в качестве целевого значения pimtrg FB-управления. Таким образом, резкое варьирование давления наддува в ходе работы в переходном режиме подавляется, и можно предотвращать формирование звука всасывания, который приводит к тому, что пассажир ощущает дискомфорт.
Когда результат определения этапа S305 является отрицательным, выбирается процесс этапа S307. На этапе S307 определяется то, задается или нет значение флага, соответствующего ограничению, имеющему третий наивысший приоритет, равным 1. Согласно порядку приоритетов вышеприведенного примера, здесь определяется то, задается или нет значение флага k3 равным 1. Факт того, что значение флага k3 равно 1, означает то, что переходное целевое значение для гарантирования контролируемости EGR-пропорции задается. Таким образом, когда значение флага k3 равно 1, выбирается процесс этапа S308. На этапе S308 переходное целевое значение pimtrgk3 давления наддува, вычисленное во вложенной процедуре, показанной на фиг 6, определяется в качестве целевого значения pimtrg FB-управления. Таким образом, можно предотвращать снижение контролируемости EGR-пропорции посредством обеспечения достаточного перепада давления между фактическим давлением на выпуске и фактическим давлением наддува в ходе работы в переходном режиме.
Когда результат определения этапа S307 является отрицательным, выбирается процесс этапа S309. На этапе S309 установившееся целевое значение pimtrgst давления наддува, вычисленное во вложенной процедуре, показанной на фиг.3, непосредственно определяется в качестве целевого значения pimtrg FB-управления. В этом случае регулируемое выпускное отверстие управляется таким образом, что фактическое давление pim наддува соответствует установившемуся целевому значению pimtrgst.
В случае, когда любое ограничение, ассоциированное с управлением давлением наддува, не удовлетворяется, когда вышеуказанная процедура управления давлением наддува выполняется посредством ЭМУ 50, целевое значение управления с обратной связью изменяется на переходное целевое значение, которое удовлетворяет ограничению. В случае, когда множество ограничений, ассоциированных с управлением давлением наддува, не удовлетворяются, целевое значение управления с обратной связью изменяется на переходное целевое значение, которое удовлетворяет ограничению, имеющему более высокий приоритет при текущем уровне ускорения. В дальнейшем в этом документе, для каждого из переходных целевых значений pimtrgk1, pimtrgk2, pimtrgk3, со ссылкой на чертежи описывается преимущество для случая, в котором переходное целевое значение выбирается в качестве целевого значения управления с обратной связью.
Преимущество в случае, если переходное целевое значение pimtrgk1 определяется в качестве целевого значения pimtrg FB-управления, может быть описано со ссылкой на фиг.9. Фиг.9 показывает два управляемых результата для управления давлением наддува в ходе ускорения. Управляемый результат (A) является результатом управления давлением наддува посредством постоянного использования только установившегося целевого значения, т.е. управляемым результатом в случае, если переходное целевое значение не задается. С другой стороны, управляемый результат (B) является управляемым результатом в случае, если переходное целевое значение задается через управление давлением наддува согласно настоящему варианту осуществления. Первая диаграмма сверху для каждого управляемого результата показывает временное варьирование давления P4 на выпуске. Вторая диаграмма показывает временное варьирование скорости dP4 изменения давления на выпуске. Третья диаграмма показывает временное варьирование целевого значения pimtrg FB-управления давления наддува и временное варьирование фактического давления pim наддува. Пунктирная линия указывает временное варьирование целевого значения pimtrg FB-управления. Сплошная линия указывает временное варьирование фактического давления pim наддува.
Первоначально, когда наблюдается управляемый результат (A), давление P4 на выпуске быстро увеличивается и превышает предел поддержания надежности давления на выпуске несмотря на то, что он является временным. Это обусловлено тем, что эффект увеличения давления на выпуске вследствие увеличения объема впрыска топлива и эффект увеличения давления на выпуске вследствие управления с обратной связью давлением наддува перекрываются между собой. В ходе ускорения объем впрыска топлива увеличивается посредством нажатия педали акселератора водителя, и давление на выпуске увеличивается вследствие увеличения энергии сгорания. Установившееся целевое значение давления наддува также увеличивается в ответ на увеличение объема впрыска топлива в ходе ускорения; тем не менее, турбонагнетатель вызывает задержку на наддув, так что разность между целевым значением pimtrg FB-управления и фактическим давлением pim наддува временно возрастает. Следовательно, управление с обратной связью осуществляется таким образом, что фактическое давление pim наддува увеличивается посредством увеличения частоты вращения турбины максимально быстро, и степень открытия регулируемого выпускного отверстия 18 уменьшается. Как результат, давление на выпуске дополнительно увеличивается.
В отличие от этого, в управляемом результате (B), в то время как фактическое давление P4 на выпуске выше опорного давления P4C на выпуске, и фактическая скорость dP4 изменения давления на выпуске превышает опорную скорость dP4C изменения давления на выпуске, целевое значение pimtrg FB-управления изменяется на значение, идентичное значению фактического давления pim наддува. Таким образом, регулируемое выпускное отверстие 18 управляется таким образом, чтобы поддерживать текущее давление наддува, и увеличение давления на выпуске вследствие управления с обратной связью давлением наддува подавляется. Как результат, перекрытие эффекта увеличения давления на выпуске вследствие управления с обратной связью давлением наддува с эффектом увеличения давления на выпуске вследствие увеличения объема впрыска топлива не допускается, и максимальное значение фактического давления P4 на выпуске подавляется до значения ниже предела поддержания надежности. После этого, когда фактическое давление P4 на выпуске становится ниже опорного давления P4C на выпуске, или, как показано на чертеже, фактическая скорость dP4 изменения давления на выпуске становится меньше опорной скорости dP4C изменения давления на выпуске, целевое значение pimtrg FB-управления снова изменяется на установившееся целевое значение, которое определяется из частоты вращения двигателя и объема впрыска топлива. В это время пик эффекта увеличения давления на выпуске вследствие увеличения объема впрыска топлива прошел, так что даже когда возникает эффект увеличения давления на выпуске вследствие управления с обратной связью давлением наддува, фактическое давление P4 на выпуске не увеличивается значительно снова. Таким образом, даже в ходе ускорения, при котором увеличивается давление на выпуске, надежность оборудования системы выпуска выхлопных газов гарантируется.
Фиг.10 является видом для иллюстрации преимущества в случае, если переходное целевое значение pimtrgk2 определяется в качестве целевого значения pimtrg FB-управления. Фиг.10 показывает два управляемых результата для управления давлением наддува в ходе ускорения. Управляемый результат (A) является результатом управления давлением наддува посредством постоянного использования только установившегося целевого значения, т.е. управляемым результатом в случае, если переходное целевое значение не задается. С другой стороны, управляемый результат (B) является управляемым результатом в случае, если переходное целевое значение задается через управление давлением наддува согласно настоящему варианту осуществления. Первая диаграмма сверху для каждого управляемого результата показывает временное варьирование целевого значения pimtrg FB-управления давления наддува и временное варьирование фактического давления pim наддува. Данные, указываемые посредством белых кругов на этой диаграмме, представляют собой данную величину для каждого временного шага касательно целевого значения pimtrg FB-управления, и данные, указываемые посредством черных кругов, представляют собой данную величину для каждого временного шага касательно фактического давления pim наддува. Вторая диаграмма показывает данную величину для каждого временного шага касательно скорости dpim изменения давления наддува с белым кругом.
В управляемом результате (A) возникает ситуация, когда скорость dpim изменения давления наддува быстро варьируется в положительном направлении и превышает предел формирования звука всасывания несмотря на то, что он является временным. Это обусловлено операцией управления с обратной связью давлением наддува. В ходе ускорения целевое значение pimtrg FB-управления увеличивается в ответ на увеличение объема впрыска топлива. В это время разность между целевым значением pimtrg FB-управления и фактическим давлением pim наддува временно возрастает вследствие задержки на наддув турбонагнетателя. Управление с обратной связью осуществляется таким образом, чтобы исключать разность, частота вращения турбины увеличивается посредством уменьшения степени открытия регулируемого выпускного отверстия 18, и, вообще говоря, фактическое давление pim наддува быстро увеличивается. Как результат, возникает ситуация, когда скорость dpim изменения давления наддува увеличивается и превышает предел формирования звука всасывания.
В отличие от этого, в управляемом результате (B), когда скорость dpim изменения давления наддува становится больше опорной скорости dpimC изменения давления наддува, целевое значение pimtrg FB-управления изменяется на значение, полученное посредством суммирования опорной скорости dpimC изменения давления наддува с фактическим давлением pim наддува. Фиг.11 подробно показывает варьирования целевого значения pimtrg FB-управления и фактического давления pim наддува для каждого временного шага и варьирование скорости dpim изменения давления наддува для каждого временного шага в это время. На фиг 11, на временном шаге s2, скорость dpim изменения давления наддува превышает опорную скорость dpimC изменения давления наддува. Следовательно, на следующем временном шаге s3 целевое значение pimtrg FB-управления изменяется на переходное целевое значение, т.е. значение, полученное посредством суммирования опорной скорости dpimC изменения давления наддува с фактическим давлением pim наддува на последнем временном шаге s2. Таким образом, увеличение фактического давления pim наддува на временном шаге s3 подавляется, и скорость dpim изменения давления наддува становится меньше опорной скорости dpimC изменения давления наддува. Поскольку скорость dpim изменения давления наддува меньше опорной скорости dpimC изменения давления наддува, целевое значение pimtrg FB-управления на следующем временном шаге s4 возвращается к установившемуся целевому значению, которое вычисляется из частоты вращения двигателя и объема впрыска топлива. Тем не менее, поскольку скорость dpim изменения давления наддува на временном шаге s4 снова превышает опорную скорость dpimC изменения давления наддува, целевое значение pimtrg FB-управления снова изменяется на следующем временном шаге s5 на переходное целевое значение, т.е. значение, полученное посредством суммирования опорной скорости dpimC изменения давления наддува с фактическим давлением pim наддува на последнем временном шаге s4. Таким образом, увеличение фактического давления pim наддува на временном шаге s5 подавляется, и скорость dpim изменения давления наддува снова становится меньше опорной скорости dpimC изменения давления наддува. Таким образом, целевое значение pimtrg FB-управления изменяется на переходное целевое значение каждый раз, когда скорость dpim изменения давления наддува превышает опорную скорость dpimC изменения давления наддува. Таким образом, дополнительное увеличение скорости dpim изменения давления наддува не допускается. Таким образом, даже в ходе ускорения, при котором увеличивается давление наддува, формирование звука всасывания, который приводит к тому, что пассажир ощущает дискомфорт, предотвращается. Хотя описание в отношении чертежа опускается, преимущество, аналогичное преимуществу в ходе ускорения, может быть получено в ходе замедления.
Фиг.12 является видом для иллюстрации преимущества в случае, если переходное целевое значение pimtrgk3 определяется в качестве целевого значения pimtrg FB-управления. Фиг.12 показывает два управляемых результата для управления давлением наддува в ходе замедления. Управляемый результат (A) является результатом управления давлением наддува посредством постоянного использования только установившегося целевого значения, т.е. управляемым результатом в случае, если переходное целевое значение не задается. С другой стороны, управляемый результат (B) является управляемым результатом в случае, если переходное целевое значение задается через управление давлением наддува согласно настоящему варианту осуществления. Первая диаграмма сверху для каждого управляемого результата показывает временное варьирование целевого значения pimtrg FB-управления давления наддува и временное варьирование фактического давления pim наддува. Пунктирная линия указывает временное варьирование целевого значения pimtrg FB-управления. Сплошная линия указывает временное варьирование фактического давления pim наддува. Вторая диаграмма показывает временное варьирование фактического давления P4 на выпуске. Третья диаграмма показывает временное варьирование фактического давления P4 на выпуске и временное варьирование фактического давления pim наддува. Четвертая диаграмма показывает временное варьирование степени открытия EGR-клапана 32. Пятая диаграмма показывает временное варьирование целевой EGR-пропорции egrtrg и временное варьирование фактической EGR-пропорции egr. Пунктирная линия указывает временное варьирование целевой EGR-пропорции egrtrg, и сплошная линия указывает временное варьирование фактической EGR-пропорции egr.
Первоначально, когда наблюдается управляемый результат (A), целевое значение pimtrg FB-управления снижается с постоянной скоростью изменения. Фактическое давление pim наддува снижается так, что оно соответствует означенному. Фактическое давление P4 на выпуске снижается со снижением фактического давления pim наддува. Снижение целевого значения pimtrg FB-управления выполняется в соответствии с уменьшением объема впрыска топлива в ходе замедления, и снижение фактического давления pim наддува достигается посредством управления с обратной связью давлением наддува. Снижение фактического давления P4 на выпуске достигается посредством открытия регулируемого выпускного отверстия 18 посредством уменьшения объема впрыска топлива и управления с обратной связью давлением наддува. В управляемом результате (A) перепад давления между фактическим давлением pim наддува и фактическим давлением P4 на выпуске уменьшается в процессе снижения их обоих, и состояние, в котором перепад давления меньше вышеописанного опорного перепада [P4-pim]C давления, длится некоторое время. Поскольку перепад давления является движущей силой для обеспечения рециркуляции выхлопного газа, EGR-клапан 32 полностью открывается, чтобы обеспечивать величину EGR на максимуме в случае, когда движущая сила является небольшой. Тем не менее, когда перепад давления является слишком небольшим, выхлопной газ не протекает к впускной стороне в такой степени, даже когда EGR-клапан 32 полностью открывается. Следовательно, в то время как EGR-клапан 32 полностью открывается, длится состояние, в котором фактическая EGR-пропорция egr является недостаточной для целевой EGR-пропорции egrtrg.
В отличие от этого, в управляемом результате (B), когда перепад давления между фактическим давлением P4 на выпуске и фактическим давлением pim наддува становится меньше опорного перепада [P4-pim]C давления, целевое значение pimtrgk FB-управления изменяется на переходное целевое значение, полученное посредством вычитания опорного перепада [P4-pim]C давления из фактического давления P4 на выпуске. Иными словами, оно изменяется на значение, при котором получается давление наддува, которое гарантирует контролируемость EGR-пропорции при текущем фактическом давлении P4 на выпуске. Когда целевое значение pimtrgk FB-управления изменяется на переходное целевое значение таким способом, снижение фактического давления pim наддува упрощается. В это время фактическое давление P4 на выпуске также одновременно снижается, и его величина варьирования меньше величины варьирования фактического давления pim наддува. Таким образом, перепад давления между фактическим давлением P4 на выпуске и фактическим давлением pim наддува снова возрастает и восстанавливается до значения, которое превышает опорный перепад [P4-pim]C давления. Когда перепад давления превышает опорный перепад [P4-pim]C давления, EGR-клапан 32 не полностью открывается, и разрешается совпадение фактической EGR-пропорции egr с целевой EGR-пропорцией egrtrg посредством регулирования степени открытия EGR-клапана 32. Иными словами, контролируемость EGR-пропорции гарантируется.
Как описано выше, с помощью управления давлением наддува, которое выполняется в настоящем варианте осуществления, различные ограничения, ассоциированные с управлением давлением наддува, удовлетворяются даже в ходе работы в переходном режиме. В дополнение к такому преимуществу, с точки зрения управления, предусмотрено также преимущество в процессе создания управляющей программы. В способе изменения целевого значения управления с обратной связью, таком как управление давлением наддува согласно настоящему варианту осуществления, не требуется, например, детально регулировать прирост управления с обратной связью или переключать способ управления, так что функции управления с обратной связью не усложняются. Необязательно выполнять задачу по адаптации с огромными трудозатратами для каждого условия при работе в переходном режиме. Помимо этого, когда должно добавляться новое ограничение, ассоциированное с управлением давлением наддува, требуется просто создавать вложенную процедуру для вычисления переходного целевого значения, ассоциированного с ограничением, и изменять часть вложенной процедуры для определения конечного целевого значения таким образом, что переходное целевое значение, вычисленное в этой вложенной процедуре, также может быть выбрано на основе приоритета. Таким образом, нетрудно добавлять новое ограничение или изменять контент ограничений.
В этой связи изобретение не ограничено вышеописанным вариантом осуществления; различные модификации могут быть реализованы без отступления от сущности изобретения. Например, оно может быть модифицировано в следующих формах.
Переходное целевое значение для гарантии надежности по оборудованию должно быть значением ниже установившегося целевого значения. Когда условие этапа S211 удовлетворяется во вложенной процедуре, показанной на фиг.4, определенное преимущество может быть получено только посредством простого снижения целевого значения управления с обратной связью. Тем не менее, предпочтительно, как и в случае вышеописанного варианта осуществления, переходное целевое значение задается равным значению, идентичному значению фактического давления наддува, чтобы поддерживать текущее состояние наддува.
Переходное целевое значение для предотвращения формирования звука всасывания должно быть просто значением, при котором абсолютная величина разности от фактического давления наддува меньше абсолютной величины разности между установившимся целевым значением и фактическим давлением наддува. Когда скорость изменения давления наддува превышает опорную скорость изменения давления наддува на одном временном шаге, можно подавлять дополнительное увеличение скорости изменения давления наддува, если разность между целевым значением FB-управления и фактическим давлением наддува на следующем временном шаге может задаваться, по меньшей мере, меньшей разности на текущем временном шаге. Тем не менее, предпочтительно, как и в случае вышеописанного варианта осуществления, значение, полученное посредством суммирования опорной скорости изменения давления наддува с фактическим давлением наддува, задается в качестве переходного целевого значения в случае, если скорость изменения давления наддува является положительным значением, и значение, полученное посредством вычитания опорной скорости изменения давления наддува из фактического давления наддува, задается в качестве переходного целевого значения в случае, если скорость изменения давления наддува является отрицательным значением. При этой конфигурации можно подавлять быстрое увеличение или снижение фактического давления наддува при надежном увеличении или снижении фактического давления наддува.
Перепад давления между переходным целевым значением для гарантирования контролируемости EGR-пропорции и фактическим давлением на выпуске может быть значением, превышающим опорный перепад давления. Иными словами, перепад давления между фактическим давлением на выпуске и фактическим давлением наддува должен быть просто восстановлен до значения, превышающего или равного опорному перепаду давления, посредством значительного снижения давления наддува. При условии, что обеспечивается перепад давления, по меньшей мере, превышающий или равный опорному перепаду давления, можно предотвращать снижение контролируемости EGR-пропорции в ходе работы в переходном режиме.
Актуатор для управления давлением наддува может быть запорным клапаном регулирования давления наддува, отличным от регулируемого выпускного отверстия. Тем не менее, запорный клапан регулирования давления наддува в этом случае предпочтительно имеет возможность изменять степень открытия непрерывно или за несколько шагов.
Перечень ссылочных позиций
2 - корпус двигателя
4 - впускной коллектор
6 - выпускной коллектор
8 - инжектор
10 - впускной канал
12 - выпускной канал
14 - компрессор
16 - турбина
18 - регулируемое выпускное отверстие
30 - EGR-канал
32 - EGR-клапан
50 - ЭМУ
52 - датчик частоты вращения
54 - датчик давления наддува
56 - датчик давления на выпуске
58 - расходомер воздуха
60 - датчик температуры всасываемого воздуха
62 - датчик рабочей величины нажатия педали акселератора
Изобретение может быть использовано в электронных системах управления двигателями внутреннего сгорания (ДВС). Предложено устройство управления, вычисляющее установившееся целевое значение давления наддува (ДН) в ходе работы ДВС в установившемся режиме на основе частоты вращения двигателя и объема впрыска топлива и управляющее исполнительным механизмом регулирования ДН таким образом, что фактическое ДН, вычисленное из сигнала датчика ДН, приближается к установившемуся целевому значению. В ходе работы ДВС в переходном режиме должно удовлетворяться множество различных условий, для каждого из которых вычисляется подходящее переходное целевое значение ДН. Когда существует одно переходное целевое значение, выбирается указанное целевое значение, а когда одновременно существует множество переходных целевых значений, выбирается одно из переходных целевых значений в соответствии с порядком приоритетов, определенным на основе ускорения. Целевое значение изменяется с установившегося целевого значения на выбранное переходное целевое значение. Технический результат заключается в удовлетворении различным ограничениям, ассоциированным с управлением давлением наддува, даже в ходе работы ДВС в переходном режиме. 7 з.п. ф-лы, 12 ил.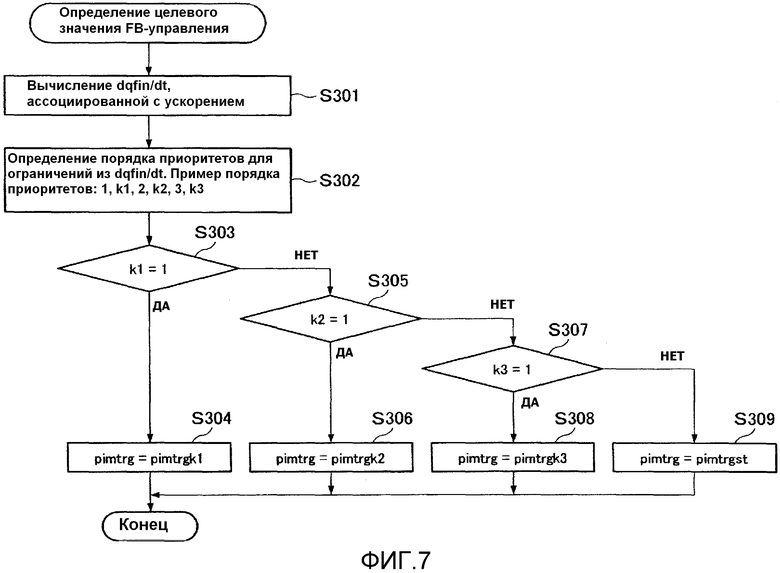
1. Устройство управления для дизельного двигателя с турбонаддувом, давление наддува которого является активно управляемым посредством функционирования актуатора, отличающееся тем, что оно содержит:
средство для вычисления фактического давления наддува двигателя из сигнала датчика давления наддува;
средство для вычисления установившегося целевого значения, которое является целевым значением давления наддува в ходе работы в установившемся режиме, на основе частоты вращения двигателя и объема впрыска топлива;
средство для управления актуатором посредством управления с обратной связью таким образом, что фактическое давление наддува приближается к установившемуся целевому значению;
средство для, когда удовлетворяется любое условие из множества различных условий, которые могут удовлетворяться в ходе работы в переходном режиме, вычисления переходного целевого значения, которое является целевым значением давления наддува, подходящего для удовлетворяемого условия в соответствии с правилом вычисления, подготовленным для каждого условия;
средство для определения порядка приоритетов для множества условий на основе значения предварительно определенной физической величины, ассоциированной с ускорением;
средство для, когда существует одно переходное целевое значение, выбора переходного целевого значения и, когда одновременно существуют множество переходных целевых значений, выбора одного из переходных целевых значений в соответствии с порядком приоритетов и
средство для, когда существует переходное целевое значение, изменения целевого значения управления с обратной связью с установившегося целевого значения на выбранное переходное целевое значение.
2. Устройство управления по п. 1, отличающееся тем, что множество условий включают в себя условие, ассоциированное с давлением на выпуске и скоростью изменения давления на выпуске.
3. Устройство управления по п. 2, отличающееся тем, что множество условий включает в себя условие, ассоциированное со скоростью изменения давления наддува.
4. Устройство управления по п. 3, отличающееся тем, что
двигатель является двигателем внутреннего сгорания, который включает в себя EGR-устройство, и
множество условий включает в себя условие, ассоциированное с перепадом давления между давлением на выпуске и давлением наддува.
5. Устройство управления по п. 2, отличающееся тем, что
двигатель является двигателем внутреннего сгорания, который включает в себя EGR-устройство, и
множество условий включает в себя условие, ассоциированное с перепадом давления между давлением на выпуске и давлением наддува.
6. Устройство управления по п. 1, отличающееся тем, что
двигатель является двигателем внутреннего сгорания, который включает в себя EGR-устройство, и
множество условий включает в себя условие, ассоциированное с перепадом давления между давлением на выпуске и давлением наддува.
7. Устройство управления по п. 1, отличающееся тем, что множество условий включает в себя условие, ассоциированное со скоростью изменения давления наддува.
8. Устройство управления по п. 7, отличающееся тем, что
двигатель внутреннего сгорания является двигателем внутреннего сгорания, который включает в себя EGR-устройство, и
множество условий включает в себя условие, ассоциированное с перепадом давления между давлением на выпуске и давлением наддува.
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ВНУТРЕННЕГО СГОРАНИЯ С СИСТЕМОЙ ВПУСКА ВОЗДУХА | 2000 |
|
RU2264550C2 |
| УСТРОЙСТВО И СПОСОБ РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ НАДДУВА ВОЗДУХА | 1992 |
|
RU2104403C1 |
| WO 2011086708 A1, 21.07.2011 | |||
| US 7434399 B2, 14.10.2008 | |||
| Телескопический силовой цилиндр | 1987 |
|
SU1571321A2 |

