Область техники
Изобретение относится к сети электропитания, являющейся частью оборудования летательного аппарата.
Предшествующий уровень техники
Известно, что для системы электропитания на борту летательного аппарата используется бортовой генератор. Обычно, это генератор, связанный с тяговым двигателем летательного аппарата или со вспомогательной силовой установкой (APU), имеющей газовую турбину.
Как правило, такой генератор содержит основную электрическую машину, которая образует основной генератор электроэнергии, работающий в синхронном режиме после запуска соответствующего газотурбинного двигателя. Основная электрическая машина имеет индукционные обмотки ротора и статора, которые подают переменный ток (AC) на питающий трехфазную шину электрической сети летательного аппарата.
Специальная сеть имеет также оборудование подачи электропитания, в котором шина постоянного тока (DC) питается от AC напряжения трехфазной шины с помощью выпрямителя. Оборудование подачи электропитания питает трехфазные электроприводы от DC напряжения шины постоянного тока посредством преобразователей энергии инверторного типа.
Напряжение переменного тока трехфазной шины, или напряжение постоянного тока на шине постоянного тока, управляется посредством блока управления генератором (GCU), который подает постоянный ток на обмотку статора пускателя, имеющего обмотку ротора, соединенную с ротором основной электрической машины через вращающийся выпрямитель. Обычно, блок управления генератора вызывает варьирование возбуждения постоянного тока таким образом, чтобы поддерживать уровень переменного тока на трехфазной шине, или уровень постоянного тока на шине постоянного тока, равный постоянному установленному значению рабочей точки.
Электрическая энергия, требуемая для питания обмотки возбуждения пускателя, может быть предоставлена вспомогательным электрическим генератором, например, синхронным генератором с постоянным магнитом, или может быть получена от бортовой электросети летательного аппарата.
В электрической сети такого типа, преобразователи энергии инверторного типа, которые питают приводы, должны иметь такие размеры, чтобы учитывать и электрические, и тепловые напряжения, связанные с механической мощностью, требуемой для управления приводом. Такие преобразователи энергии обычно являются частями общего тяжелого и громоздкого оборудования.
Краткое изложение сущности изобретения
Задача изобретения заключается в предоставлении способа генерации и генераторного модуля, который позволяет избежать, по меньшей мере, некоторых из упомянутых выше недостатков предшествующего уровня техники.
С этой целью, настоящее изобретение предоставляет способ генерации, осуществляемый генераторным модулем сети электропитания летательного аппарата, причем упомянутая сеть электропитания содержит линию подачи электропитания, питаемую упомянутым генераторным модулем, шину постоянного тока, питаемую от упомянутой линии подачи электропитания через выпрямитель и, по меньшей мере, один электропривод питаемый напряжением переменного тока от шины постоянного тока через инвертор; причем
способ генерации, содержащий этап подачи напряжения переменного тока как функции от устанавливаемого значения напряжения и напряжения, измеренного в упомянутой бортовой сети; при этом
упомянутый способ генерации отличается тем, что содержит этап определения упомянутого устанавливаемого напряжения как функции от рабочих параметров упомянутого привода.
Таким образом, благодаря этим характеристикам, напряжение постоянного тока шины постоянного тока зависит от рабочего параметра привода. Это дает возможность ограничить задание габаритов инвертора и/или уменьшить потери в инверторе.
В соответствии с одним вариантом реализации, упомянутое измеряемое напряжение представляет собой напряжение шины постоянного тока.
Рабочим параметром может быть скорость вращения привода.
Соответственно, изобретение предоставляет генераторный модуль для сети электропитания летательного аппарата, причем упомянутый генераторный модуль, приспособленный для подачи напряжения переменного тока как функции от устанавливаемого значения напряжения и измеряемого напряжения в упомянутой сети электропитания, причем сети электропитания, содержащей линию подачи электропитания, питаемую упомянутым генераторным модулем, шину постоянного тока, питаемую от упомянутой линии подачи электропитания через выпрямитель и, по меньшей мере, один электропривод, питаемый переменным током от шины постоянного тока через инвертор;
упомянутый генераторный модуль отличается тем, что включает в себя модуль для определения упомянутого устанавливаемого напряжения как функции от рабочего параметра упомянутого привода.
В одном варианте реализации генераторный модуль содержит генератор и блок управления генератором, приспособленным для подачи упомянутого напряжения переменного тока как функции от тока управления, определяемого блоком управления генератором, приспособленным для определения тока управления как функции от устанавливаемого значения напряжения и напряжения, измеряемого в упомянутой бортовой сети.
Преимущества и характеристики, отмеченные выше в связи со способом генерации, также относятся и к генераторному модулю.
Изобретение также относится к летательному аппарату, имеющему сеть электропитания, включающую в себя генераторный модуль по изобретению, линию подачи электропитания, питаемую упомянутым генераторным модулем, шину постоянного тока, питаемую от упомянутой линии подачи электропитания через выпрямитель и, по меньшей мере, один электропривод, питаемый переменным током от шины постоянного тока через инвертор.
Краткое описание чертежей
Изобретение может быть лучше понято при чтении приведенного ниже не ограничивающего описания в связи с сопровождающими чертежами, на которых:
Фиг.1 изображает схему сети электропитания, предназначенную обеспечивать электроснабжение энергетического оборудования на борту летательного аппарата,
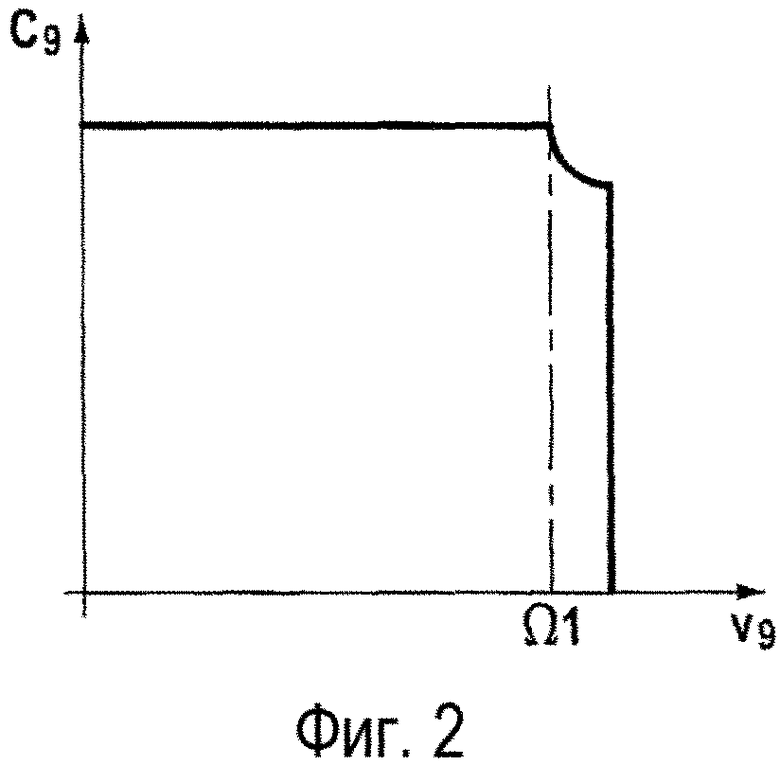
Фиг.2 - график рабочей кривой электропривода;
Фиг.3 - график, показывающий электрические потери в преобразователе, который питает привод с такой рабочей кривой, как показана на Фиг.2, и
Фиг.4 и 5 - кривые, подобные тем, что приведены на Фиг.2 и 3, соответственно, и относятся к электроприводу другого типа.
Описание предпочтительных вариантов воплощения
На Фиг.1 показана электрическая сеть с сопутствующим оборудованием летательного аппарата. Электрическая сеть 1 представляет собой сеть, предназначенную для питания оборудования 30 подачи электропитания, и она содержит генераторный модуль 20, оборудование 30 подачи электропитания и трехфазную линию подачи электропитания, соединяющую генераторный модуль 20 с оборудованием 30 подачи электропитания.
Генераторный модуль 20 вырабатывает трехфазное напряжение VAC. В показанном примере генераторный модуль 20 содержит генератор 2 и блок 6 управления генератором.
Генератор 2 механически соединяется с двигателем 7, который может быть, например, двигателем, обеспечивающим тягу, или другим вспомогательным силовым блоком летательного аппарата. Генератор 2 может быть стартер/генератором, пригодным для работы в качестве электрического двигателя при запуске двигателя 7.
Когда генератор 2 приводится во вращение двигателем 7, генератор 2 вырабатывает трехфазное напряжение VAC, которое зависит от тока Ie управления, вырабатываемого блоком 6 управления генератором. Генератор 2, например, представляет собой трехступенчатый генератор такого типа, как описано во введении.
Линия 3 подачи электропитания питается трехфазным напряжением VAC, подаваемым генератором 2.
Оборудование 30 подачи электропитания имеет шину 4 постоянного тока, выпрямитель 5 и инвертор 8. Шина 4 постоянного тока питается напряжением VDC постоянного тока от трехфазного напряжения VAC линии 3 подачи питания через выпрямитель 5.
Электроприводы 9 питаются электроэнергией посредством оборудования 30 подачи электропитания. Более конкретно, каждый электропривод 9 питается трехфазным напряжением от шины 4 постоянного тока через инвертор 8. Каждый электропривод 9, обычно, представляет собой электродвигатель, работа которого может быть охарактеризована скоростью вращения, обозначаемой как v9, и вращающим моментом, обозначаемым как C9.
Блок 6 управления генератором принимает измерительные сигналы, отображающие напряжение постоянного тока VDC шины 4 постоянного тока и скорость вращения v9, и вырабатывает ток Ie управления для генератора 2.
Для этого блок 6 управления генератором использует контур управления, в которой ток Ie управления определяется как функция напряжения постоянного тока VDC шины 4 постоянного тока и устанавливаемого значения VDC_set напряжения постоянного тока.
Устанавливаемое значение VDC_set напряжения задается блоком 6 управления генератором как функция скорости вращения v9. Таким образом, в электрической сети 1 напряжение постоянного тока VDC шины 4 постоянного тока зависит от скорости вращения v9, тем самым, позволяя ограничить рассеяние и ограничить выбор габаритов инверторов 8, как поясняется ниже в связи с Фиг.2-5.
Известно, что механическая мощность Pm электропривода 9, может быть выражена следующим образом: Pm=v9×C9. Известно также, что вращающий момент C9 увеличивается с фазовым током I электропривода 9.
Эта механическая мощность Pm соответствует потребляемой электрической мощности Pe, которая пропорциональна произведению U9×I, где U9 - напряжение, подаваемое на привод 9 инвертором 8.
При низкой скорости вращения v9, и независимо от вращающего момента C9, механическая мощность Pm и, следовательно, потребляемая электрическая мощность Pe, оказываются малыми. Поэтому напряжение U9, подаваемое на привод 9 инвертором 8, может быть низким.
На Фиг.2 приведен график, показывающий рабочую кривую электропривода 9 первого типа, в виде зависимости вращающего момента C9 от скорости вращения v9. Из Фиг.2 видно, что вращающий момент C9 практически максимален во всем диапазоне скоростей вплоть до скорости Ω1.
На Фиг.3 приведен график, показывающий изменение мощности Р8, рассеиваемой в инверторе 8, подключенном к электроприводу 9, в зависимости от скорости v9 для электропривода 9, такого типа, как показано на Фиг.2. Кривая 11 соответствует напряжению VDC, которое изменяется со скоростью v9, в соответствии с настоящим изобретением. Кривая 10 соответствует постоянному напряжению VDC, которое поддерживается постоянным, в соответствии с предшествующим уровнем техники, как отмечено во введении, и она приводится для сравнения.
Мощность Р8, рассеиваемая в инверторе 8, может быть разделена на потери проводимости и потери переключения. Потери переключения зависят от произведения VDC×I. С учетом кривой на Фиг.2, ток I должен быть большим, чтобы обеспечить большой вращающий момент C9, независимо от скорости вращения v9. Таким образом, если VDC поддерживается постоянным, мощность P8 велика даже при малой скорости вращения v9, как показано кривой 10.
Вместе с тем, как объяснено выше, напряжение U9 может быть малым при малой скорости вращения v9. Однако, напряжение U9 зависит от напряжения постоянного тока VDC. Если возможно сделать напряжение U9 малым, то напряжение постоянного тока VDC также может быть малым. Таким образом, за счет снижения напряжения постоянного тока VDC при малой скорости вращения v9, мощность Р8, рассеиваемая в инверторе 8, может быть снижена по сравнению с кривой 10, как показано посредством кривой 11.
На Фиг.3 кривые 10 и 11 пересекаются в одной точке P при скорости Ω1.
Иначе говоря, для электропривода 9, который характеризуется рабочей кривой такого типа, как показано на Фиг.2, оказывается возможным определить устанавливаемое значение напряжения VDC_set, от которого зависит скорость вращения v9 электроприводов, что делает возможным снизить рассеиваемую в инверторе 8 мощность Р8. Таким образом, задаваемые габариты инвертора 8 по соображениям нагрева могут быть ограниченными. Вместе с тем, задание габаритов инвертора 8 по электрическим параметрам диктуется необходимостью работы при вышеуказанной точке P.
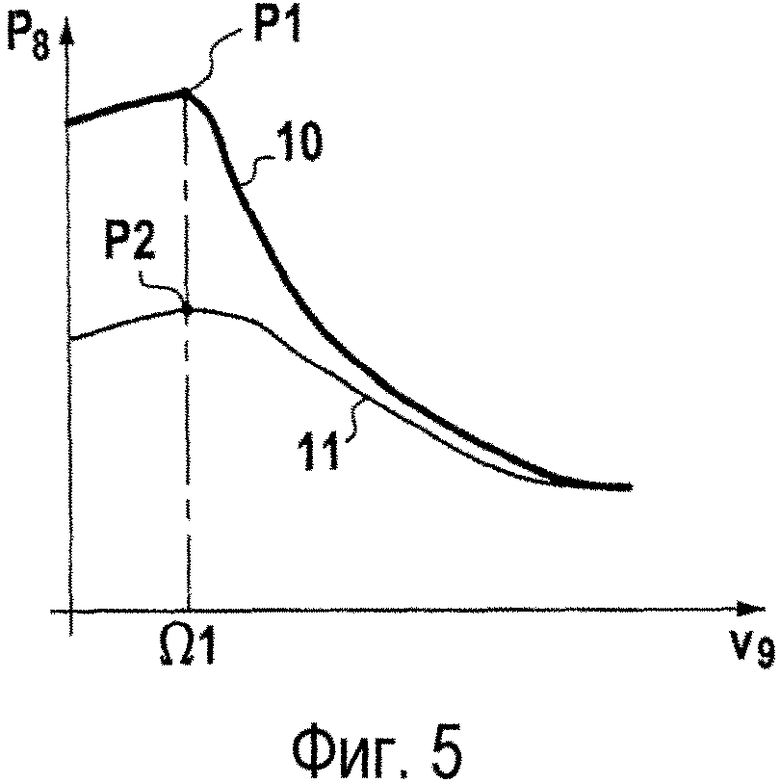
На Фиг.4 и 5 представлены графики, аналогичные графикам на Фиг.2 и 3, соответственно, и относятся к электроприводу 9 второго типа, который имеет рабочую кривую отличающейся формы, как показано на Фиг.4. На Фиг.4 и 5 используются одни и те же обозначения, но без риска путаницы.
В этом варианте реализации, вращающий момент C9 максимален при малых скоростях до скорости Ω1, а затем постепенно уменьшается по остальной части диапазона скоростей.
Как и в случае вариантов реализации на Фиг.2 и 3, постоянное напряжение VDC может быть малым при малых скоростях вращения. На Фиг.5 показано, что в этом случае мощность P8, рассеиваемая в инверторе, уменьшается, как и в случае на Фиг.3 (см. кривую 11, расположенную ниже кривой 10).
Кроме того, в варианте реализации рабочая точка P2, где мощность P8, задаваемая кривой 11, максимальна, соответствует мощности, которая меньше рабочей точки P1, где мощность Р8, задаваемая кривой 10, является максимальной.
Иначе говоря, в случае электрического привода 9, который имеет рабочую кривую такого типа, как показано на Фиг.4, оказывается возможным определить устанавливаемое значение напряжения VDC_set, от которого зависит скорость вращения v9 электроприводов 9, что позволяет снизить мощность Р8, рассеиваемую в инверторе 8, а также и снизить максимальную рассеиваемую мощность P8. Таким образом, оказывается возможным ограничить задаваемые габариты инвертора 8 и по тепловым, и по электрическим соображениям.
Блок 6 управления генератором имеет модуль определения, который преобразовывает скорость вращения v9 в рабочую точку VDC_set. Например, модуль определения использует таблицу соответствия или соотношение преобразования. Специалист в данной области техники может создать модуль определения, который соответствует данной рабочей кривой, например, такого типа, как показано на Фиг.2 или Фиг.4.
В одном варианте, вместо использования скорости вращения v9, блок 6 управления генератором использует некоторый другой рабочий параметр электропривода 9 для определения рабочей точки VDC_set.
В другом варианте, регулировка, осуществляемая блоком 6 управления генератором, применяется к трехфазному напряжению VAC линии 3 подачи питания. В этом случае, блок 6 управления генератором определяет трехфазное установленное значение напряжения VAC_set, которое является функцией скорости v9 или некоторого другого рабочего параметра электропривода 9.
Выше описан генераторный модуль 20, в котором трехфазное напряжение, вырабатываемое генератором 2, зависит от тока управления, определяемого блоком 6 управления. Вместе с тем, изобретение не ограничено генераторным модулем этого типа. Таким образом, генераторный модуль может содержать самовозбуждаемый асинхронный генератор, связанный с переключаемыми конденсаторами для обеспечения множества уровней напряжения. В одном варианте, генераторный модуль может содержать самовозбуждаемый асинхронный генератор, связанный с инвертором, вырабатывающим намагничивающий ток для регулировки постоянного тока. В другом варианте, генераторный модуль может содержать синхронный генератор с постоянным магнитом и множеством обмоток для работы при множественных уровнях мощности.
Пример применения электрической сети 1 относится к “зеленому рулению” летательного аппарата. В этом примере, приводы 9 представляют собой электрические двигатели, приспособленные для руления летательного аппарата, и двигатель 7 представляет собой вспомогательную силовую установку. Тяговые двигатели летательного аппарата, в этом случае могут и не запускаться, что позволяет осуществлять значительную экономию топлива.


Изобретение относится к способу генерации напряжения, осуществляемому генераторным модулем (20) электрической сети (1) летательного аппарата, причем упомянутой электрической сети (1), содержащей линию (3) подачи электропитания, питаемую упомянутым генераторным модулем (20), шину (4) постоянного тока, питаемую от упомянутой линии (3) подачи электропитания через выпрямитель (5) и, по меньшей мере, один электропривод (9), питаемый переменным током от шины (4) постоянного тока через инвертор (8); причем способ генерации содержит этап, на котором подают напряжения (VAC) переменного тока как функцию от устанавливаемого значения напряжения и напряжения, измеренного в упомянутой бортовой сети (1) электропитания. Для получения технического результата - ограничения потерь в инверторе и ограничения его габаритов способ генерации содержит этап, на котором определяют упомянутое устанавливаемое значение напряжения как функцию от рабочего параметра (v9) упомянутого привода (9). 3 н. и 4 з.п. ф-лы, 5 ил.
1. Способ генерации для генерации напряжения, причем способ, осуществляемый генераторным модулем (20) электрической сети (1) летательного аппарата, причем упомянутая электрическая сеть (1) содержит линию (3) подачи электропитания, питаемую упомянутым генераторным модулем (20), шину (4) постоянного тока, питаемую от упомянутой линии (3) подачи электропитания через выпрямитель (5) и, по меньшей мере, один электропривод (9), питаемый переменным током от шины (4) постоянного тока через инвертор (8); причем
способ генерации содержит этап, на котором подают напряжение переменного тока (VAC) как функцию от устанавливаемого значения напряжения и напряжения, измеренного в упомянутой бортовой сети (1); при этом
упомянутый способ генерации напряжения, отличающийся тем, что он содержит этап, на котором определяют упомянутое устанавливаемое значение напряжения как функцию от рабочего параметра (V9) упомянутого привода (9).
2. Способ генерации по п.1, в котором упомянутое измеренное напряжение является напряжением (VDC) шины (4) постоянного тока.
3. Способ генерации по п.1, в котором рабочий параметр (V9) представляет собой скорость вращения упомянутого привода (9).
4. Способ генерации по п.1, в котором генераторный модуль (30) содержит генератор (2) и блок (6) управления генератором, причем генератор (2), приспособленный для подачи упомянутого напряжения (VAC) переменного тока как функции от тока управления (Ie), определяемого блоком (6) управления генератором, приспособленным для определения тока управления (Ie) как функции от устанавливаемого значения напряжения и напряжения, измеренного в упомянутой бортовой сети (1).
5. Генераторный модуль (20) напряжения для электрической сети (1) летательного аппарата, причем упомянутый генераторный модуль (20), приспособленный для подачи напряжения (VAC) переменного тока как функции устанавливаемого значения напряжения и напряжения, измеренного в упомянутой электрической сети (1), причем в упомянутой электрической сети (1), содержащей линию (3) подачи электропитания, питаемую упомянутым генераторным модулем (20), шину (4) постоянного тока, питаемую от упомянутой линии (3) подачи электропитания через выпрямитель (5) и, по меньшей мере, один электропривод (9), питаемый переменным током от шины (4) постоянного тока через инвертор (8); при этом
упомянутый генераторный модуль отличается тем, что он включает в себя модуль для определения упомянутого устанавливаемого значения напряжения как функции от рабочего параметра (V9) упомянутого привода.
6. Генераторный модуль (20) по п.5, содержащий генератор (2) и блок управления генератором (6), причем генератор (2), приспособленный для подачи упомянутого напряжения (VAC) переменного тока как функции от тока управления (Ie), определяемого блоком (6) управления генератором, причем блоком (6) управления генератором, приспособленным для определения тока управления (Ie) как функции от устанавливаемого значения напряжения и напряжения, измеренного в упомянутой бортовой сети (1).
7. Летательный аппарат, имеющий электрическую сеть (1), включающую в себя генераторный модуль (20) по п.5, линию (3) подачи электропитания, питаемую упомянутым генераторным модулем (20), шину (4) постоянного тока, питаемую от упомянутой линии (3) подачи электропитания через выпрямитель (5) и, по меньшей мере, один электропривод (9), питаемый переменным током от шины (4) постоянного тока через инвертор (8).
| US5233286A, 03.08.1993 | |||
| DE19519424A1, 28.11.1996 | |||
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ | 2006 |
|
RU2314622C1 |

