Изобретение относится к нефтяной и газовой промышленности и предназначено для контроля уровня тампонажных растворов преимущественно в емкостях передвижных осреднительных установок с осевыми мешалками.
При проведении изоляционных работ в нефтяных и газовых скважинах высокие требования предъявляются к качеству и количеству приготавливаемых порций закачиваемых в заливочные (бурильные или насосно-компрессорные) трубы тампонажных растворов. Для решения этих задач при строительстве и ремонте скважин находят широкое применение передвижные цементировочные агрегаты, например ЦА-320 или иного аналогичного типа. При этом для выравнивания плотности и достижения требуемой вязкости раствора используется технология непрерывной круговой циркуляции по схеме «мерная емкость - насос - мерная емкость», а измерение уровня и в конечном счете определение объема порции приготавливаемой смеси осуществляют путем визуального отсчета показаний шкалы линейки, являющейся неотъемлемой частью мерной емкости (см. книгу Барановского В.Д., Булатова А.И., Крылова В.И. Крепление и цементирование наклонных скважин. -М., Недра: 1983, 352 с., ил., с. 136 и с. 231).
Такая технология приготовления тампонажного раствора не обеспечивает возможности автоматического поддержания уровня, что ограничивает ее применение в компьютеризированных тампонажных комплексах. Другим недостатком используемого способа контроля уровня тампонажных растворов является дополнительная погрешность, вызванная налипанием раствора на погруженную в мерную емкость измерительную часть линейки.
Для устранения указанных недостатков в последние годы разработан дистанционный бесконтактный способ контроля уровня тампонажных растворов в осреднительных емкостях передвижных агрегатов, включающий измерение дальности поверхности раствора от электромагнитного приемно-излучающего датчика (дальномера), зондирующий луч которого направляют вдоль осевой линии емкости. Этот способ основывается на эффекте отражения электромагнитного волнового луча от границы раздела «жидкость - воздух» и по принципу действия датчика может иметь различные варианты конструктивной реализации. Наибольшее распространение получил способ контроля уровня тампонажных растворов, основанный на ультразвуковой локации поверхности жидкости с помощью датчика типа ДУУ-340 (http://gelstver.ru/catalog), устанавливаемого над поверхностью раствора с помощью кронштейна и струбцины, закрепляемой на борту емкости. Основным преимуществом такого способа является возможность направления на поверхность раствора зондирующего луча по линии, совпадающей с осевой линией емкости. Это, как известно, устраняет погрешность измерения дальности вследствие неортогональности поверхности раствора и осевой линии емкости из-за обычно негоризонтируемого размещения на земной буровой площадке монтажной базы передвижного агрегата (автомобиля, прицепа). Однако, как показывает опыт, использование мерных емкостей цементировочных агрегатов для перемешивания циркуляционным методом тампонажных растворов не обеспечивает высокой точности регулирования их параметров. Для доведения тампонажных растворов до гомогенной структуры требуемого качества используются специализированные емкости передвижных осреднительных установок типа ОС 4×2 (http://www.korona-tek.ru). Отличительной особенностью этих емкостей, обычно имеющих цилиндрическую форму, является наличие осевых мешалок, что препятствует измерению дальности поверхности раствора по осевой линии емкости и приводит к необходимости параллельного смещения зондирующего луча относительно указанной линии на некоторое расстояние для отхода от места расположения осевой мешалки. По этой причине при отклонении осевой линии емкости от вертикали, что практически всегда имеет место, возникает возможность появления сложно учитываемой дополнительной погрешности определения уровня раствора. Эта погрешность в зависимости от азимута плоскости отклонения осевой линии емкости может изменяться от нуля до максимального значения, определяемого величиной угла отклонения от вертикали упомянутой линии и величиной смещения относительно ее зондирующего луча датчика. В результате чего возникает неопределенность в точности контроля уровня, что существенно сказывается на точности определения объема малых (до 0,5 м3) порций приготавливаемого раствора и затрудняет возможность «тонкой» регулировки его плотности.
Изобретение направлено на устранение указанных недостатков.
Для достижения этого технического результата в предлагаемом способе контроля уровня тампонажных растворов преимущественно в емкостях передвижных осреднительных установок с осевыми мешалками, включающем измерение дальности поверхности раствора от электромагнитного приемно-излучающего датчика, зондирующий луч которого направляют параллельно осевой линии емкости, используют дополнительный аналогичный основному датчик, при этом зондирующие лучи обоих датчиков, располагают в одной плоскости симметрично осевой линии емкости, а истинное значение дальности устанавливают по формуле

где d1 и d2 - соответственно дальности, измеренные основным и дополнительным датчиками.
Отличительными признаками предлагаемого способа контроля уровня тампонажных растворов преимущественно в емкостях передвижных осреднительных установок с осевыми мешалками от указанного выше наиболее близкого к нему является использование дополнительного аналогичного основному датчика, расположение зондирующих лучей обоих датчиков в одной плоскости симметрично осевой линии емкости и определение истинного значения дальности по формуле (1).
Предлагаемый способ поясняется прилагаемой схемой контроля уровня тампонажного раствора в осреднительной емкости с осевой мешалкой.
Сущность способа заключается в следующем.
Перед проведением тампонажных работ на скважине осуществляют монтаж обвязки цементировочного оборудования. Для контроля параметров тампонажного раствора и режимов его закачивания в скважину на входящих в состав оборудования передвижных агрегатах устанавливают необходимый комплект датчиков станции контроля процесса цементирования. При этом на крышке 1 емкости 2 передвижной осреднительной установки (на схеме не изображена) кроме основного электромагнитного приемно-излучающего датчика 3 монтируют аналогичный основному дополнительный датчик 4. Датчики 3 и 4 могут иметь различный принцип действия. Однако, для улучшения качества контроля наклонной поверхности тампонажного раствора целесообразно использовать датчики в виде лазерных дальномеров, отличающихся малыми габаритными размерами, высокой разрешающей способностью при малом угле расхождения зондирующего луча, обеспечивающего на приемлемой дальности малый диаметр лазерного пятна, обычно не превышающий 4 мм. В процессе проведения монтажных работ точки излучения в1 и в2 датчиков 3 и 4 располагают в одной плоскости, перпендикулярной осевой линии 00′ емкости 2. Для отхода от привода 5 осевой мешалки 6 датчики 3 и 4 размещают таким образом, чтобы их зондирующие лучи в1с1 и в2с2 были расположены в одной плоскости симметрично осевой линии емкости 2 на расстоянии 
Благодаря предложенному способу при проведении на скважине тампонажных работ с использованием вычислительного устройства, являющегося составной частью станции контроля процесса цементирования, обеспечивается регистрация и более точный контроль уровня тампонажных растворов в емкостях осреднительных передвижных установок с осевыми мешалками. Кроме того, предложенный способ при развертывании комплекса цементирования на скважине позволяет снизить требования к определению пространственного положения передвижной установки на буровой площадке, что особенно важно для закрытых осреднительных емкостей, исключающих визуальный контроль за поверхностью жидкости.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС ЦЕМЕНТИРОВАНИЯ СКВАЖИН | 2003 |
|
RU2256777C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОБЪЕМА РАСХОДУЕМОЙ ЖИДКОСТИ | 2013 |
|
RU2547877C1 |
| АГРЕГАТ НАСОСНЫЙ ЦЕМЕНТИРОВОЧНЫЙ | 2019 |
|
RU2716317C1 |
| ПЕРЕДВИЖНАЯ УСТАНОВКА ДЛЯ ЦЕМЕНТИРОВАНИЯ НЕФТЯНЫХ ИЛИ ГАЗОВЫХ СКВАЖИН | 2008 |
|
RU2362674C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО КОНТРОЛЯ ПАРАМЕТРОВ РАСТВОРА В ЖЕЛОБЕ БУРОВОЙ УСТАНОВКИ | 2013 |
|
RU2520110C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРОЦЕССА ЦЕМЕНТИРОВАНИЯ СКВАЖИН | 2008 |
|
RU2379501C1 |
| УСТАНОВКА ДЛЯ ЦЕМЕНТИРОВАНИЯ НЕФТЯНЫХ ИЛИ ГАЗОВЫХ СКВАЖИН | 2010 |
|
RU2445203C1 |
| СПОСОБ ГРАДУИРОВКИ РАДИОИЗОТОПНЫХ ПЛОТНОМЕРОВ | 2010 |
|
RU2442889C1 |
| ТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС ДЛЯ СТИМУЛЯЦИИ НЕФТЕОТДАЧИ ПЛАСТОВ СКВАЖИН | 2016 |
|
RU2647133C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО КОНТРОЛЯ ПАРАМЕТРОВ РАСТВОРА В ЖЕЛОБЕ БУРОВОЙ УСТАНОВКИ | 2015 |
|
RU2602558C1 |
Изобретение относится к области нефтяной и газовой промышленности и предназначено для обеспечения высококачественного проведения процесса тампонажных работ в скважинах. Техническим результатом изобретения является повышение точности контроля уровня тампонажных растворов в емкостях передвижных осреднительных установок с осевыми мешалками. Для чего при контроле уровня, включающем измерение дальности поверхности раствора от электромагнитного приемно-излучающего датчика, зондирующий луч которого направляют параллельно осевой линии емкости, используют дополнительный аналогичный основному датчик. При этом зондирующие лучи обоих датчиков располагают в одной плоскости симметрично осевой линии емкости, а истинное значение дальности устанавливают по приведенной формуле. 1 ил.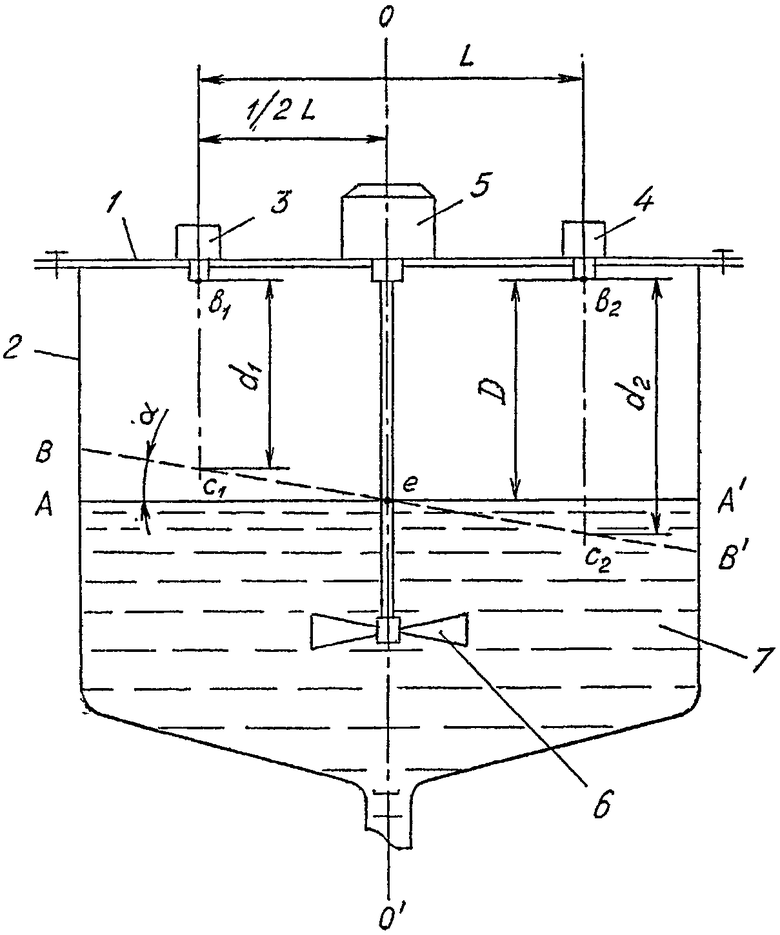
Способ контроля уровня тампонажных растворов преимущественно в емкостях передвижных осреднительных установок с осевыми мешалками, включающий измерение дальности поверхности раствора от электромагнитного приемно-излучающего датчика, зондирующий луч которого направляют параллельно осевой линии емкости, отличающийся тем, что используют дополнительный аналогичный основному датчик, при этом зондирующие лучи обоих датчиков располагают в одной плоскости симметрично осевой линии емкости, а истинное значение дальности устанавливают по формуле

где d1 и d2 - соответственно дальности, измеренные основным и дополнительным датчиками.
| Устройство для измерения уровня жидкости в баке с осевой мешалкой | 1989 |
|
SU1673862A1 |
| Устройство для измерения уровня сыпучих материалов | 1976 |
|
SU669202A1 |
| US 6843124 B2 18.01.2005 | |||
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МАССЫ СЖИЖЕННОГО ГАЗА | 2002 |
|
RU2246702C2 |

