Область техники
[0001] Настоящее изобретение относится к способу ввода/вывода информации с использованием точечного изображения, посредством которого можно вводить/выводить различную информации при помощи оптического считывания информации точечного изображения, сформированного на носителе и, в частности, к способу формирования потокового точечного изображения линейно согласно предопределенному правилу.
Уровень техники
[0002] Ранее предлагались способы ввода/вывода информации посредством печати на поверхности носителя точечного изображения, полученного посредством двухмерного расположения мелких точек согласно предопределенному правилу, вместо штрих-кода, с тем, чтобы обеспечить введение/выведение большого количества информации и программ, считывая их в виде данных изображений, полученных посредством камеры, оцифровывания данных, и затем выведения информации, такой как речь.
[0003] Например, предлагался способ хранения полученной закодированной информации, и информации касательно XY координат в средствах хранения на будущее, а также выведения различной информации или выполнения программ посредством получения их из закодированной информации и XY координат, считываемых посредством оптических считывающих средств (патентные источники 1 и 2).
Список ссылок
Патентная литература
[0004] [Патентный источник 1] PCT/JP2003/003162
[Патентный источник 2] Японский опубликованный патент №.2007-12016.
Краткое описание изобретения
Техническая проблема
[0005] Согласно этим способам точечного изображения (патентные источники 1 и 2), предложенным настоящим изобретателем, область для печати точечного изображения, которая сконфигурирована в виде предопределенной прямоугольной области, произвольным образом определяется заранее, а затем точечное изображение печатают в области на поверхности носителя. Из-за этой причины, в случае рисунков и карт, включая САПР чертежи, буквы/символы/графику и подобное, поскольку область, где печатается видимая информация, маленькая, требуется очень сложный набор операций для определения области для печати точечного изображения. Эго усложняет широкое использование способа точечного изображения удобным образом. Это представляло собой не решаемую проблему.
[0006] При формировании точечного изображения на поверхности носителя, ограничением в отношении формы прямоугольной области для формирования точечного изображения, является невозможность должной печати точечного изображения вдоль реальных линий и подобных элементов, включая видимые кривые, напечатанные на поверхности носителя. Например, линия сама по себе не может содержать информации. Кроме того, вследствие ограничений касательно формы, точечное изображение не может формироваться в виде произвольной формы в произвольном месте поверхности носителя, и точки формируются даже в области, где нет необходимости во вводе/выводе информации посредством способа точечного изображения. Кроме того, трудным является формирование точечных изображений на поверхностях изогнутых объектов, таких как шар, манекены и подобное, а также различных видов изделий одновременно оставляя области прямоугольной формы для формирования точечных изображений.
[0007] Настоящее изобретение было выполнено, принимая во внимание вышеописанные проблемы, и имеет задачу широко внедрить технологию потокового точечного изображения посредством определения нескольких частей информации используя точечное изображение, сформированное на основании опорных точек, расположенных линейно и последовательно на поверхности носителя, независимо от формы прямоугольной области для формирования точечного изображения, и выведения частей информации посредством операции формирования изображения или подобной, осуществляемой средствами формирования изображения.
Решение проблемы
[0008] Способ формирования точечного изображения согласно настоящему изобретению представляет собой способ формирования точечного изображения, включающий, при формировании на поверхности носителя потокового точечного изображения, определяющего информацию согласно предопределенному правилу для точек, следующие стадии:
1) расположения множества опорных точек линейно и последовательно на поверхности носителя согласно предопределенному правилу;
2) предоставления первой виртуальной опорной линии, соединяющей множество опорных точек и сформированной в виде прямой линии или ломаной линии и/или кривой;
3) предоставления второй виртуальной опорной линии, определенной в предопределенном месте относительно опорной точки и/или первой виртуальной опорной линии и сформированной в виде прямой линии и/или кривой;
4) предоставления множества виртуальных опорных точек в предопределенных местах на второй виртуальной опорной линии; и
5) расположения информационной точки, информация которой определяется расстоянием и направлением от виртуальной опорной точки в конечной точке, выраженной посредством вектора с виртуальной опорной точкой, которая представляет собой начальную точку.
[0009] Это обеспечивает возможность печати точечного изображения в виде линии, включающей кривую, на поверхности носителя независимо от формы прямоугольной области в обычной точечном изображении, а также возможность ввода/вывода различных типов информации, принимая во внимание рисунки и карты, включая САПР чертежи, буквы/символы/графику и подобное посредством оптического считывания информации точечного изображения на носителе.
[0010] Кроме того, непрерывное формирование точечного изображения в виде полоски в круговом направлении позволяет должным образом печатать точечное изображение на всех типах изогнутых поверхностей, таких как шары, манекены и подобное, а также различных видов изделий, а также оптическим образом считывать информацию точечного изображения, сформированного на носителе.
[ООП] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ формирования точечного изображения по п.1, отличающийся тем, что на стадии 1) множество опорных точек, расположенных линейно и последовательно, расположены на предопределенных интервалах.
[0012] Это упрощает поиск первой и второй виртуальной опорной линии, а также может сэкономить время расчета, вследствие сложности алгоритма.
[0013] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ формирования точечного изображения по п.1, отличающийся тем, что на стадии 4) множество виртуальных опорных точек, предусмотренных на второй виртуальной опорной линии, предусмотрено на множестве опорных точек в месте второй виртуальной опорной линии.
[0014] Это обеспечивает возможность определения информации на основании расстояния и направления от опорной точки и, таким образом, позволяет экономить время расчета, вследствие сложности алгоритма, для поиска виртуальной опорной точки. Таким образом, это может уменьшить количество ошибок, вызываемых расчетом для получения местоположения виртуальной опорной точки.
[0015] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ формирования точечного изображения по п.1, отличающийся тем, что дополнительно включает, после стадии 4), стадию обеспечения множества виртуальных опорных точек на множестве опорных точек.
[0016] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ формирования точечного изображения по п.1, отличающийся тем, что дополнительно включает, после стадии 4), стадию расположения опорной точки на виртуальной опорной точке.
[0017] Это обеспечивает возможность предотвращения ухудшения точности считывания, способствуя ее повышению в области участка, конфигурирующего предопределенную информационную группу точечного изображения.
[0018] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ формирования точечного изображения по п.1, отличающийся тем, что дополнительно включает, после стадии 4), стадию расположения виртуальной опорной точки в предопределенном месте, в котором опорная точка, расположенная на виртуальной опорной точке, соединяется с опорной точкой, расположенной на первой виртуальной опорной линии.
[0019] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ формирования точечного изображения по п.1, отличающийся тем, что на стадии 1) множество опорных точек, расположенных линейно и последовательно согласно предопределенному правилу, расположены не менее чем в два ряда, по меньшей мере, на поверхности носителя,
на стадии 2) не менее чем две первые виртуальные опорные линии, соединяющие множество опорных точек и сформированные при помощи прямых линий или ломаных линий и/или кривых, выполнены в соответствии с опорными точками не менее чем в два ряда, и
на стадии 3) вторая виртуальная опорная линия, определенная в предопределенном месте относительно опорной точки и/или первой виртуальной опорной линии, определена между не менее чем двумя первыми виртуальными опорными линиями.
[0020] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ формирования точечного изображения по п.7, отличающийся тем, что вторая виртуальная опорная линия содержит прямую линию, соединяющую множество опорных точек, расположенных на не менее чем двух различных первых виртуальных опорных линиях.
[0021] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ формирования точечного изображения по п.7, отличающийся тем, что на стадии 4) множество виртуальных опорных точек, расположенных в предопределенных местоположениях на вторых виртуальных опорных линиях, предусмотрены в средних точках вторых виртуальных опорных линий.
[0022] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ формирования точечного изображения по п.1, отличающийся тем, что на стадии 3) вторые виртуальные опорные линии, определенные в предопределенных местах относительно опорных точек и/или первой виртуальной опорной линии, содержат прямые линии, образующие противоположные стороны, формирующие треугольник с основанием в виде первой виртуальной опорной линии, соединяющей соседние опорные точки прямой линией, и
на стадии 4) множество виртуальных опорных точек, расположенных в предопределенных местах на вторых виртуальных опорных линиях, расположены в вершинах треугольника или на противоположных сторонах треугольника.
[0023] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ формирования точечного изображения по п.10, отличающийся тем, что треугольник образован посредством предопределенных углов при основании в соседних опорных точках и длин противоположных сторон, соответствующих предопределенным увеличениям относительно основания или высоты от основания к вершине, которые соответствуют соответствующему коэффициенту увеличения относительно основания.
[0024] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ формирования точечного изображения по п.10, отличающийся тем, что треугольник включает равнобедренный треугольник
[0025] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ формирования точечного изображения по п.10, отличающийся тем, что треугольник включает равносторонний треугольник.
[0026] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ формирования точечного изображения по п.1, отличающийся тем, что на стадии 3) вторая виртуальная опорная линия, определенная в предопределенном месте относительно опорной точки и/или первой виртуальной опорной линии, содержит прямую линию, которая делит на две равные половины внутренний угол в вершине первой виртуальной опорной линии, образованной посредством ломаной линии, и
на стадии 4) множество виртуальных опорных точек, расположенных в предопределенных местах на вторых виртуальных опорных линиях, расположены на предопределенных расстояниях от множества опорных точек.
[0027] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ формирования точечного изображения по п.1, отличающийся тем, что на стадии 2) первая виртуальная опорная линия, соединяющая множество опорных точек и сформированная в виде ломаной линии, выполнена только с частью, где опорная точка расположена в качестве вершины.
[0028] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ формирования точечного изображения по п.1, отличающийся тем, что на стадии 3) вторая виртуальная опорная линия, определенная в предопределенном месте относительно опорной точки и/или первой виртуальной опорной линии, содержит прямую линию, которая образует произвольный угол относительно касательной к первой виртуальной опорной линии, образованной кривой, и
на стадии 4) множество виртуальных опорных точек, расположенных в предопределенных местах на вторых виртуальных опорных линиях, расположены в предопределенных местах, определенных по соседним точкам.
[0029] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ формирования точечного изображения по п.16, отличающийся тем, что предопределенное местоположение, определенное по соседним опорным точкам, определяется точкой пересечения вторых виртуальных опорных линий, которые образуют предопределенные углы относительно соседних опорных точек, расстоянием от опорной точки, соответствующей предопределенному коэффициенту увеличения относительно длины первой виртуальной опорной линии, сформированной кривой, соединяющей соседние опорные точки, или высотой от первой виртуальной опорной линии, сформированной кривой, соединяющей соседние опорные точки, соответствующей предопределенному коэффициенту увеличения относительно длины первой виртуальной опорной линии.
[0030] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ формирования точечного изображения по п.1, отличающийся тем, что на стадии 3) вторая виртуальная опорная линия, определенная в предопределенном месте относительно опорной точки и/или первой виртуальной опорной линии, содержит прямую линию, проходящую через опорную точку или среднюю точку соседних опорных точек.
[0031] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ формирования точечного изображения по п.1, отличающийся тем, что на стадии 3) вторая виртуальная опорная линия, определенная в предопределенном месте относительно опорной точки и/или первой виртуальной опорной линии, содержит прямую линию, перпендикулярную первой виртуальной опорной линии, сформированной прямой линией, или прямую линию, перпендикулярную касательной к первой виртуальной опорной линии, сформированной кривой, и
на стадии 4) множество виртуальных опорных точек, расположенных в предопределенных местах на вторых виртуальных опорных линиях, расположены в предопределенных местах, определенных по соседним опорным точкам.
[0032] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ формирования точечного изображения по п.1, отличающийся тем, что на стадии 4) множество виртуальных опорных точек, предусмотренных в предопределенных местах на второй виртуальной опорной линии, предусмотрены на предопределенных расстояниях от первой виртуальной опорной линии, образованной от прямой линии или от касательной к первой виртуальной опорной линии, сформированной кривой.
[0033] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ формирования точечного изображения по п.1, отличающийся тем, что на стадии 1) множество опорных точек, расположенных линейно и последовательно, расположены на различных интервалах, и направление точечного изображения и предопределенной информационной группы точечного изображения определяются интервалами расположения.
[0034] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ формирования точечного изображения по п.21, отличающийся тем, что множество опорных точек расположены для каждой предопределенной информационной группы точечного изображения таким образом, что интервал между по меньшей мере одной парой соседних опорных точек отличается от одинаковых интервалов между другими парами соседних опорных точек, и предопределенная информационная группа точечного изображения определена интервалами расположения.
[0035] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ формирования точечного изображения по п.21, отличающийся тем, что множество опорных точек расположены для каждой предопределенной информационной группы точечного изображения таким образом, что интервалы между по меньшей мере двумя парами соседних опорных точек отличаются от одинаковых интервалов между другими парами соседних опорных точек, и направление точечного изображения и предопределенной информационной группы точечного изображения определяются интервалами расположения.
[0036] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ формирования точечного изображения по п.1, отличающийся тем, что на стадии 5) информационные точки, информация каждой из которой определяется расстоянием и направлением от виртуальной опорной точки в конечной точке, выраженной вектором с виртуальной опорной точкой, являющейся начальной точкой, размещаются на двух противоположных сторонах первой виртуальной опорной линии в различных направлениях смещения, и направление точечного изображения и предопределенной информационной группы точечного изображения определяются отличием между направлениями смещения.
[0037] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ формирования точечного изображения по п.1, отличающийся тем, на стадии 4) множество виртуальных опорных точек, предусмотренных в предопределенных местах на вторых виртуальных опорных линиях, расположены таким образом, что различные количества виртуальных опорных точек располагаются на двух сторонах первой виртуальной опорной линии, и направление точечного изображения и предопределенной информационной группы точечного изображения определяются отличием в количествах.
[0038] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ формирования точечного изображения по п.1, отличающийся тем, что на стадии 5) информационные точки, информация каждой из которой определяется расстоянием и направлением от виртуальной опорной точки в конечной точке, выраженной вектором с виртуальной опорной точкой, являющейся начальной точкой, размещаются таким образом, что различные количества информационных точек располагаются на двух сторонах первой виртуальной опорной линии, при этом направление точечного изображения и предопределенной информационной группы точечного изображения определяются отличием в количествах.
[0039] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ формирования точечного изображения по п.1, отличающийся тем, что на стадии 5) информация определяется в зависимости от того размещается ли на каждой виртуальной опорной точке, размещенной на виртуальной опорной точке, информационная точка, чья информация определяется расстоянием и направлением от виртуальной опорной точки в конечной точке, выраженной вектором с виртуальной опорной точкой, являющейся начальной точкой, или не размещается ни на одной из них.
[0040] Это обеспечивает возможность расположения гибким образом информационных точек, то есть, размещать информационную точку в месте, смещенном относительно заданной виртуальной опорной точки из множества виртуальных опорных точек, расположенных в одном точечном изображении (при этом расстояние и направление отличаются от 0), размещать информационную точку на другой виртуальной опорной точке (при этом расстояние и направление равняются 0), а также не размещать информационную точку на еще одной виртуальной опорной точке (без информационной точки).
[0041] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ формирования точечного изображения по п.1, отличающийся тем, что на стадии 1) направление точечного изображения и предопределенной информационной группы определяются посредством смещения и размещения по меньшей мере одной из множества опорных точек в качестве ключевой точки в предопределенном месте.
[0042] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ формирования точечного изображения по п.28, отличающийся тем, что дополнительно включает, после стадии 3), стадию определения направления точечного изображения и предопределенной информационной группы посредством размещения ключевой точки в предопределенном месте в направлении параллельном или перпендикулярном направлению второй виртуальной опорной линии.
[0043] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ формирования точечного изображения по п.28, отличающийся тем, что дополнительно включает, после стадии 3), стадию обеспечения третьей виртуальной опорной линии, проходящей через по меньшей мере одну из множества опорных точек и перпендикулярной прямой линии, формирующей первую виртуальную опорную линию или касательной к кривой, формирующей первую виртуальную опорную линию, или делящей внутренний угол на одинаковые половины в вершине ломаной линии, формируя первую виртуальную опорную линию и определяя направление точечного изображения и предопределенной информационной группы посредством размещения ключевой точки в предопределенном месте на третьей виртуальной опорной линии.
[0044] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ формирования точечного изображения по п.28, отличающийся тем, что на стадии 3) вторая виртуальная опорная линия, определенная в предопределенном месте относительно опорной точки и/или первой виртуальной опорной линии, определяется исходя лишь из опорной точки, отличающейся от опорной точки, смещенной как ключевая точка.
[0045] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ формирования точечного изображения по п.1, отличающийся тем, что дополнительно включает, после стадии 2), стадию обеспечения третьей виртуальной опорной линии, проходящей через по меньшей мере одну из множества опорных точек и перпендикулярной прямой линии, формирующей первую виртуальную опорную линию или касательной к кривой, формирующей первую виртуальную опорную линию, или делящей внутренний угол на одинаковые половины в вершине ломаной линии, формируя первую виртуальную опорную линию и размещая по меньшей мере одну боковую точку в предопределенном месте предопределенном месте на третьей виртуальной опорной линии, которая определяет направление точечного изображения и предопределенной информационной группы.
[0046] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ формирования точечного изображения по п.32, отличающийся тем, что на стадии 4) множество виртуальных опорных точек, предусмотренных в предопределенных местах на вторых виртуальных опорных линиях, предусмотрены на четвертой виртуальной опорной линии, параллельной первой виртуальной опорной линии и проходящей через боковую точку.
[0047] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ формирования точечного изображения по п.33, отличающийся тем, что множество опорных точек предусмотрены на предопределенных интервалах на четвертой виртуальной опорной линии.
[0048] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ формирования точечного изображения по п.32, отличающийся тем, что, по меньшей мере, не менее чем одна из боковых точек размещается на каждой из двух сторон первой виртуальной опорной линии таким образом, что боковые точки располагаются на различных расстояниях от первой виртуальной опорной линии, и направление точечного изображения определяется посредством расстояний между боковыми точками и первой виртуальной опорной линией.
[0049] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ формирования точечного изображения по п.28 и п.32, отличающийся тем, что, по меньшей мере, не менее чем одна из боковых точек размещается на каждой из двух сторон первой виртуальной опорной линии таким образом, что боковые точки располагаются на одинаковых расстояниях от первой виртуальной опорной линии, и направление точечного изображения и предопределенной информационной группы точечного изображения определяются посредством расстояния между боковой точкой и ключевой точкой.
[0050] Это обеспечивает возможность определения направления смещения ключевой точки по расстоянию от боковой точки вдобавок к смещению от первой виртуальной опорной линии. Таким образом можно определить направление точечного изображения более точно.
[0051] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ формирования точечного изображения по п.1, отличающийся тем, что опорная точка и/или информационная точка сформирована при помощи многоугольной формы, сконфигурированной для обозначения направления, а направление точечного изображения определяется формой.
[0052] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ формирования точечного изображения по п.1, отличающийся тем, что одна опорная точка и/или информационная точка сформирована таким образом, что имеет размер, отличающийся от других опорных точек и/или других информационных точек, и направление точечного изображения и предопределенной информационной группы определяются на основании различия размеров.
[0053] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ формирования точечного изображения по п.1, отличающийся тем, что одна опорная точка и/или информационная точка сформирована таким образом, что имеет форму, отличающуюся от других опорных точек и/или других информационных точек, и направление точечного изображения и предопределенной информационной группы определяются на основании различия форм.
[0054] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ формирования точечного изображения по п.1, отличающийся тем, что опорная точка и/или информационная точка напечатана краской, обладающей свойством, заключающимся в реакции на световое излучение, отличающейся от реакции краски, используемой для печати видимой информации на поверхности носителя.
[0055] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ формирования точечного изображения по п.40, отличающийся тем, что краска, обладающая свойством, заключающимся в отличающейся реакции, является невидимой.
[0056] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ формирования точечного изображения по п.40, отличающийся тем, что световое излучение содержит инфракрасное излучение,
краска, обладающая некоторым свойством, включает краску, поглощающую в инфракрасном диапазоне, и
краска, используемая для печати видимой информации на поверхности носителя, содержит краску, пропускающую или отражающую инфракрасное излучение
[0057] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ ввода/вывода информации, используемый для потокового точечного изображения, сформированного согласно способу по п.1, отличающийся тем, что включает:
стадию считывания оптическими считывающими средствами предопределенного места, предопределенной области или всей области на поверхности носителя в виде данных изображения, которые конфигурируют потоковое точечное изображение; и
стадию получения оптическими считывающими средствами кодового обозначения и/или значения координаты посредством анализа данных изображения и выдачи соответствующей информации или выполнения соответствующей программы.
[0058] Кроме того, способ формирования точечного изображения согласно настоящему изобретению представляет собой способ ввода/вывода информации по п.43, отличающийся тем, что оптические считывающие средства считывают точечное изображение в предопределенном месте в предопределенной области или во всей области, находясь в контакте, или отдельно от поверхности носителя, или считывают точечное изображение сформированное линейно.
[0059] Точечное изображение согласно настоящему изобретению представляет собой потоковое точечное изображение, отличающееся тем, что содержит:
множество опорных точек, расположенных линейно и последовательно на поверхности носителя согласно предопределенному правилу;
первую виртуальную опорную линию, соединяющую множество опорных точек и сформированную прямой линией или ломаной линией и/или кривой;
вторую виртуальную опорную линию, определенную в предопределенном месте относительно опорной точки и/или первой виртуальной опорной линии и сформированную прямой линией и/или кривой;
множество виртуальных опорных точек, размещенных в предопределенных местах на второй виртуальной опорной линии; и
информационную точку, информация которой определяется расстоянием и направлением от вертикальной опорной точки.
[0060] Это обеспечивает возможность формирования точечного изображения вдоль реальной линии, включающей кривую. Кроме того, поскольку предопределенные информационные группы, определенные согласно предопределенному правилу для точечных изображений предоставлены последовательно, то, исходя из конструктивных соображений, существует возможность регулирования в предопределенном диапазоне длины предопределенной информационной группы, посредством увеличения и уменьшения интервалов предопределенных информационных групп, па основании длины реальной линии.
[0061] Кроме того, установление длины предопределенных информационных групп как средней длины от длины реальной линии, может предотвратить уменьшение количества информации, а также искажение точечного изображения, которое происходит на участке, где средства считывания не могут его считать, вследствие отличий длин, интервалов, размера и количества точек вблизи конечной части (возле соединения полосок), а также на тех других последовательных точечных изображениях, когда последовательно сформированные потоковые точечные изображения выполнены в форме полосок на, например, изогнутом теле в круговом направлении.
[0062] В данном случае предопределенный диапазон определяется минимальным значением, при котором существует возможность гарантированного анализа данных изображения, полученных посредством формирования изображения предопределенной информационной группы с использованием оптических считывающих средств. В случае оптических считывающих средств из уровня техники, минимальным значением является значение от одного миллиметра до нескольких миллиметров. Очевидно, что совершенствование технологий обеспечит то, что минимальное значение будет стремиться к нулю, без ограничений.
[0063] В этом случае оптическими считывающими средствами являются, например, камера или сканер. Сканер может представлять собой перьевой сканер или планшетный сканер.
[0064] Способ настройки не ограничен этим. Возможно осуществление настройки посредством изменения мест расположения точек или предопределенных интервалов и количества точек в предопределенной информационной группе, а именно посредством выполнения их, так называемой переменной длины.
[0065] Это обеспечивает возможность оперирования с данными различных размеров в пределах объема информационного набора, когда каждая предопределенная информационная группа выполнена таким образом, что обладает различной длиной, а именно, в диапазоне, в котором информация может считываться считывающими средствами.
[0066] Кроме того, точечное изображение согласно настоящему изобретению представляет собой точечное изображение, сформированное посредством расположения на одной линии или на множестве линий потокового точечного изображения согласно стадии линейного и последовательного расположения множества опорных точек согласно предопределенному правилу, стадии предоставления первой виртуальной опорной линии, соединяющей множество опорных точек и сформированной прямой линией или ломаной линией и/или кривой, стадии предоставления, по меньшей мере, не менее чем одной второй виртуальной опорной линии, определенной в предопределенном месте относительно опорной точки и/или первой виртуальной опорной линии и сформирована прямой линией и/или кривой, стадии предоставления множества виртуальных опорных точек в предопределенных местах на второй виртуальной опорной линии и стадии размещения информационной точки, значения координат XY которой и/или значения кода определяются согласно расстоянию и направлению от виртуальной опорной точки в конечной точке, выраженной вектором, при этом виртуальная опорная точка является начальной точкой.
[0067] Согласно данному способу, посредством формирования множества потоковых точечных изображений с постоянными интервалами между опорными точками расположенными бок о бок можно определить значения координат XY на печатном носителе без каких-либо разрывов, а также сгенерировать информацию о расположении. Кроме того, предполагается, что буквы, служебные условные обозначения, карты, графика и подобное печатаются на печатном носителе, при этом линейные сегменты отслеживаются или к ним прикасаются перьевым сканером. В этом случае формирование потокового точечного изображения лишь вдоль линейных сегментов позволяет рационально располагать точечное изображение. При формировании точечного изображения, координаты XY которого определяются в виде двухмерного кода, возможно формирование точечного изображения посредством повтора предопределенной информационной группы в виде произвольной формы, совпадающей с информационной областью, видимым образом сформированной на поверхности носителя без ограничения формой прямоугольной области (используется в качестве индекса).
[0068] Кроме того, точечное изображение согласно настоящему изобретению представляет собой точечное изображение по п.46, отличающееся тем, что потоковое точечное изображение обеспечивается опорной точкой в предопределенном месте, которая служит в качестве опорной точки для определения второй виртуальной опорной линии и/или направления точечного изображения и одного значения координат XY и/или значения кода.
[0069] Согласно данному способу, посредством размещения новой опорной точки можно легко определить направление точечного изображения и предопределенной информационной группы без использования какой-либо информационной точки. Это обеспечивает возможность избегания ненужного уменьшения информации. Кроме того, размещение новой опорной точки позволяет точно отражать местоположение виртуальной опорной точки, как начальной точки информационных точек.
[0070] Кроме того, точечное изображение согласно настоящему изобретению представляет собой точечное изображение по любому из пп.45 - 47, отличающееся тем, что множество опорных точек или множество виртуальных опорных точек расположены, по меньшей мере, на или вдоль реальной линии, видимым образом сформированной на поверхности носителя.
[0071] Это обеспечивает возможность того, что линия сама по себе содержит информацию и осуществляет операцию ввода/вывода информации в полной мере и удобным способом.
[0072] В данном случае, выражение "по меньшей мере" значит то, что опорные точки или виртуальные опорные точки расположены на или вдоль реальной линии в части, где реальная линия видимым образом сформирована на поверхности носителя. В части, где реальная линия не сформирована, существует возможность произвольного расположения опорных точек или виртуальных опорных точек без ограничения вышеприведенным выражением.
Положительные эффекты изобретения
[0073] Согласно настоящему изобретению существует возможность печати точечного изображения линейно на поверхности носителя независимо от формы прямоугольной области, в которой точечное изображение формируется в виде двухмерного кода. Кроме того, существует возможность ввода/вывода различных типов информации в отношении рисунков и карт, включая САПР чертежи, буквы/символы/графику и подобное посредством оптического считывания информации точечного изображения, сформированной на носителе. Существует определенная трудность при печати точечного изображения, сконфигурированного в виде прямоугольной области, на изогнутой поверхности тела, с сохранением его формы. Использование потокового точечного изображения согласно настоящему изобретению позволяет должным образом печатать точечные изображения на всех типах изогнутых поверхностей, таких как шары, манекены и подобное, а также различных видов изделий, а также оптическим образом считывать информацию точечного изображения, сформированного на носителе.
Краткое описание графических материалов
[0074] Фиг.1 представляет собой вид, схематически показывающий потоковое точечное изображение.
Фиг.2 представляет собой вид, показывающий примеры информационных точек точечного изображения и отображение двоичного разряда данных, определенного на них.
Фиг.3 представляет собой вид, показывающий примеры информационных точек точечного изображения и отображение двоичного разряда данных, определенного на них.
Фиг.4 представляет собой вид, показывающий примеры информационных точек точечного изображения и отображение двоичного разряда данных, определенного на них.
Фиг.5 представляет собой вид, показывающий модификации точечного изображения.
Фиг.6 объясняет способ формирования потокового точечного изображения.
Фиг.7 объясняет способ формирования потокового точечного изображения.
Фиг.8 представляет собой вид, показывающий пример того, как первая виртуальная опорная линия выполнена в виде кривой Безье.
Фиг.9 представляет собой пример каждого точечного изображения согласно настоящему изобретению.
Фиг.10 показывает пример каждого потокового точечного изображения.
Фиг.11 показывает пример каждого потокового точечного изображения.
Фиг.12 показывает пример каждого потокового точечного изображения.
Фиг.13 показывает пример каждого потокового точечного изображения.
Фиг.14 показывает пример каждого потокового точечного изображения.
Фиг.15 показывает пример того, как каждая первая виртуальная опорная линия определяется по расположению опорных точек.
Фиг.16 показывает пример способа определения второй виртуальной опорной линии.
Фиг.17 показывает пример способа определения второй виртуальной опорной линии.
Фиг.18 показывает пример способа определения второй виртуальной опорной линии.
Фиг.19 показывает пример способа определения второй виртуальной опорной линии.
Фиг.20 показывает пример способа определения второй виртуальной опорной линии.
Фиг.21 объясняет местоположения, в которых выполнены виртуальные опорные точки.
Фиг.22 показывает пример каждого потокового точечного изображения.
Фиг.23 показывает пример каждого потокового точечного изображения.
Фиг.24 показывает пример того, как направление каждого точечного изображения и каждой предопределенной информационной группы точечного изображения определяются по количеству виртуальных опорных точек.
Фиг.25 показывает пример каждого потокового точечного изображения.
Фиг.26 объясняет пример каждого расположения ключевых точек.
Фиг.27 объясняет примеры расположений боковых точек.
Фиг.28 представляет собой вид, показывающий пример того, как координаты XY получают из точечного изображения.
Фиг.29 показывает пример каждого потокового точечного изображения.
Фиг.30 показывает пример каждого потокового точечного изображения.
Фиг.31 показывает пример каждого потокового точечного изображения.
Фиг.32 показывает пример формата каждого точечного изображения.
Фиг.33 показывает пример формата каждого точечного изображения.
Фиг.34 показывает пример каждого потокового точечного изображения.
Фиг.35 показывает пример каждого потокового точечного изображения.
Описание вариантов осуществления
[0075] Фиг.1 представляет собой вид для объяснения примера точечного изображения согласно настоящему изобретению. Фиг.2 представляет собой увеличенный вид, показывающий пример информационных точек точечного изображения и отображение двоичного разряда данных, определенного на них.
[0076] Способ ввода/вывода информации с использованием точечного изображения согласно настоящему изобретению включает распознавание точечного изображения 1, а также средства выведения информации из точечного изображения 1 и выполнения программы.
[0077] Данный способ получает опорные точки 4 сначала посредством считывания точечного изображения 1, сформированного в области, где должна быть предоставлена информация (например, реальная линия, сформированная на носителе), в виде данных изображения с использованием оптических считывающих средств, а затем устанавливает линию, соединяющую опорные точки 4, как первую виртуальную опорную линию 6. Если в местах, где на первой виртуальной опорной линии 6 должны быть расположены опорные точки 4, точки не расположены, точки возле мест, где должны располагаться опорные точки 4, извлекаются и устанавливаются как ключевые точки 2 (на двух конечных частях предопределенной информационной группы). Способ затем извлекает боковые точки 12, расположенные на расширенных прямых в положительном и отрицательном направлениях позиционного смещения ключевой точки 2, и устанавливает прямую линию, которая проходит через боковые точки 12 и ключевую точку 2 и перпендикулярна первой виртуальной опорной линии 6, как третья виртуальная опорная линия 8.
[0078] Данный способ затем устанавливает вторые виртуальные опорные линии 7, которые проходят через опорные точки 4 и проходят в направлении перпендикулярном первой виртуальной опорной линии 6 и четвертые виртуальные опорные линии 9, которые проходят через боковые точки 12 и параллельны первой виртуальной линии 6, а также устанавливает точки пересечений между виртуальными опорными линиями и виртуальными опорными точками 5. Способ затем ищет точку вблизи виртуальной опорной точки 5 и извлекает информационную точку 3, для которой информация определяется по расстоянию и направлению от виртуальной опорной точки 5.
[0079] В этом случае соотношение между интервалом расположения опорных точек 4 и расстоянием от первой виртуальной опорной линии 6 к боковым точкам 12, составляет 1:1. Таким образом, посредством установки квадрата с опорной точкой 4 в качестве вершины и аспектного отношения, составляющего 1:1 на первой виртуальной опорной линии 6, можно получить местоположение виртуальной опорной точки 5 посредством интерполяции. Следует отметить, что существует возможность установки произвольного аспектного отношения.
[0080] Данный способ определяет направление предопределенной информационной группы, т.е. направление точечного изображения 1 по направлению ключевой точки 2 от первой виртуальной опорной линии 6. Например, если ключевая точка 2 смещена от первой виртуальной опорной линии 6 в направлении +Y, то информационные точки 2 в предопределенной информационной группе могут быть распознаны при распознавании направления смещения, как совпадающие с правильным местоположением.
[0081] Если ключевая точка 2 смещена от первой виртуальной опорной линии 6 в направлении -Y, то информационные точки 3 в предопределенной информационной группе могут быть распознаны при распознавании, как совпадающие с правильным местоположением, при этом направление предопределенной информационной группы, которое устанавливается посредством вращения вокруг ее центра на 180°.
[0082] В этом случае также возможно определение направления точечного изображения 1 по расстоянию между боковой точкой 12 и ключевой точкой 2. Если, например, расстояние между ключевой точкой 2 и боковой точкой 12, размещенной в направлении +Y, короче чем расстояние между ключевой точкой 2 и боковой точкой 12, размещенной в направлении -Y, то информационные точки 3 в предопределенной информационной группе могут быть распознаны при распознавании соответствующего направления, как совпадающие с правильным местоположением.
[0083] Если расстояние между ключевой точкой 2 и боковой точкой 12, размещенной в направлении -Y, короче чем расстояние между ключевой точкой 2 и боковой точкой 12, размещенной в направлении +Y, то информационные точки 3 в предопределенной информационной группе могут быть распознаны при распознавании, как совпадающие с правильным местоположением, при этом направление предопределенной информационной группы, которое устанавливается посредством вращения вокруг ее центра на 180°.
[0084] Когда изображение точечного изображения 1, считываемое оптическими считывающими средствами, сохраняется в буфере изображения, центральный процессор (ЦП) оптических считывающих средств анализирует точки в буфере изображения с целью декодирования численного значения, определенного для каждой информационной точки 3, на основании расстояния и направления каждой информационной точки 3 от виртуальной опорной точки 5 (см. фиг.2, 3, и 4). Эти численные значения затем объединяются как координаты XYZ или кодовые значения с информацией, сохраненной в памяти оптических считывающих средств или персонального компьютера. Вследствие этого, речь, изображения, динамические изображения, буквы, программы или подобное, касающееся координат XYZ или кодовых значений, считывается и выводится на средствах отображения или средствах вывода речи/изображения.
[0085] При генерировании точечного изображения 1 согласно настоящему изобретению, алгоритм генерирования точечного кода располагает мелкие точки, например, ключевые точки 2, информационные точки 3, опорные точки 4 и боковые точки 12 с целью обеспечения распознаваемости информации, такой как речь, согласно предопределенному правилу. (Например, линейное или последовательное расположение опорных точек, обеспечивает виртуальные опорные линии, составляющие многоугольник посредством использования множества расположенных опорных точек, обеспечивает виртуальную опорную точку в вершине многоугольника и обеспечивает точку, определяющую информацию в конечной точке вектора с начальной опорной точкой в качестве начальной точки. Следует отметить, что существует возможность определения направления точечного изображения посредством использования формы этого многоугольника).
[0086] Как показано на фиг.1, прямая линия в горизонтальном направлении, которая конфигурирует предопределенную информационную группу точечного изображения 1, сформированного вдоль линейно расположенных опорных точек 4 (линейно - в случае показанном на фиг.1), выполнена как первая виртуальная опорная линия 6 на носителе.
[0087] Боковая точка 12 выполнена на третьей виртуальной опорной линии 8 перпендикулярной первой виртуальной опорной линии 6, проходящей через опорную точку 4 (опорная точка расположена как ключевая точка 2 в случае, показанном на фиг.1). Прямая линия параллельная третьей виртуальной опорной линии 8, проходящей через опорную точку 4 устанавливается как вторая виртуальная опорная линия 7. Прямая линия, проходящая через боковую точку 12 и параллельная первой виртуальной опорной линии 6, устанавливается как четвертая виртуальная опорная линия 9. Кроме того, данный способ определяет направление, в котором ключевая точка 2, размещенная в предопределенном местоположении на носителе (на третьей виртуальной опорной линии 8 в случае, как показано на фиг.1), смещается относительно первой виртуальной опорной линии 6, направление точечного изображения на расстоянии от боковой точки 12 и предопределенную информационную группу точечного изображения 1 по интервалу расположения боковых точек 12 и/или ключевых точек 2.
[0088] Следует отметить, что существует возможность формирования точечного изображения 1 вдоль реальной линии, сформированной видимым образом на поверхности носителя. Реальная линия в настоящем случае представляет собой концепцию, относящуюся к виртуальной линии и включает любую линию, которая реально существует.
[0089] Например, реальные линии включают сплошные линии, пунктирные линии, штриховые линии, прямые линии и кривые. Настоящее изобретение не ограничивается любым конкретным типом носителя, на котором формируются линии (например, дисплей монитора) или любым конкретным типом материала для формирования линий (например, краска). Следует отметить, что точечное изображение может представлять собой напечатанное обозначение, индикацию на дисплее или выпуклое/вогнутое изображение, такое как изображение в отверстие или углублении на металлическом или пластмассовом носителе.
[0090] Точка пересечения между второй виртуальной опорной линией 7 и четвертой виртуальной опорной линией 9 устанавливается как виртуальная опорная точка 5.
[0091] Точечное изображение 1 генерируется посредством расположения одной или множества информационных точек 3, установленных описанным выше способом, каждая из которых расположена на расстоянии и в направление относительно виртуальной опорной точки 5.
[0092] При считывании оптическими считывающими средствами точечного изображения 1 в виде данных изображения, существует возможность коррекции искажения линз оптических считывающих средств или подобного, наклонного изображения, расширения и сжатия поверхности листа, изгиба поверхности носителя, искажения во время печати посредством использования опорных точек 4. В частности, посредством применения данного способа можно получить корректирующую функцию 
[0093] Расположение опорных точек 4 в точечном изображении 1 позволяет корректировать искажение данных изображения, считанных из точечного изображения оптическими считывающими средствами, связанное с оптическими считывающими средствами и/или возникающее вследствие формирования наклонного изображения. Даже формирование наклонного изображения посредством общераспространенной камеры с объективом с высоким коэффициентом искажений позволяет должным образом распознать точечное изображение 1 при считывании его данных изображения. Кроме того, даже если пользователь считывает точечное изображение 1 посредством оптических считывающих средств при их наклоне относительно поверхности точечного изображения 1, с использованием предопределенного алгоритма, существует возможность правильного распознавания точечного изображения 1.
[0094] Как показано на фиг.1, ключевые точки 2 представляют собой точки, расположенные на двух концах предопределенной информационной группы. Ключевые точки 2 являются изображающими точками точечного изображения 1 области, которая отображает одну информационную точечную группу. Следует отметить, что характерные точки могут располагаться в любых местоположениях в информационной точечной группе. Следует принимать во внимание, что интервал между соседними опорными точками составляет 0,5 мм. В этом случае каждая изображающая точка располагается в местоположении, смещенном на 0,1 вверх от местоположения, в котором опорная точка 4 на конечной части области точечного изображения 1 должна располагаться. Если, таким образом, информационная точка 3 определяется значениями координат X и Y опорной точки 4, то местоположение, отделенное внизу от ключевой точки 2 на 0,1 мм, соответствует координате точки. Однако это численное значение (0,1 мм) не ограничивается вышеуказанным значением, а может варьироваться в соответствии с размером области точечного изображения 1.
[0095] Информационные точки 3 представляют собой точки для распознавания различных видов информации. Каждая информационная точка 3 представляет собой точку, расположенную в конечной точке, выраженной вектором, проходящим от виртуальной опорной точки 5, как начальной точки. Например, как показано на фиг.2, каждая информационная точка 3 представляет собой точку, которая отделена от виртуальной опорной точки 5 на 0,1 мм, имеет направление и длину, которые выражены вектором и, таким образом, 3 бита выражаются посредством расположения информационных точек в направлении по часовой стрелке с угловыми интервалами, составляющими 45°, в восьми направлениях.
[0096] Согласно фиг.2, одна предопределенная информационная группа может выражать 3 (бита) × 8=24 бита.
[0097] В случае, показанном на фиг.2, 3, биты выражаются посредством расположения точек в восьми направлениях. Однако, настоящее изобретение не ограничивается этим. Существует возможность выражения 4 битов посредством расположения точек в 16 направлениях. Очевидно, что существует возможность расположения точек в произвольных направлениях на произвольных расстояниях.
[0098] Согласно фиг.1, информационные точки 3 располагаются в конечных местоположениях относительно всех виртуальных опорных точек 5 в качестве начальных точек. Однако, настоящее изобретение не ограничивается этим. Существует возможность определения информации в зависимости от того, расположена ли точка на виртуальной опорной точке. Например, информация может определяться таким образом, что расположение точки на виртуальной опорной точке представляет собой "1", а отсутствие точек представляет собой "0".
[0099] Ключевая точка 2, информационная точка 3, опорная точка 4 и боковая точка 12 предпочтительно имеют диаметры от 0,03 мм до 0,05 мм, принимая во внимание вид, точность печати в отношении качества бумаги, разрешения оптических считывающих средств, оптимальной скорости вычисления и подобного. Очевидно, что по мере того как точность печати, разрешение оптических считывающих средств и оптимальное время вычисления совершенствуются с развитием технологий, диаметр точки стремится к нулю.
[0100] Это обеспечивает возможность одновременного распознавания всех частей информации посредством формирования изображения всей поверхности носителя наряду с формированием изображения в произвольном местоположении на поверхности носителя. Даже в сегодняшних условиях при использовании высокоточного сканера существует возможность одновременного распознавания информации, находящейся на всей поверхности носителя. С другой стороны, при печати точек на очень большой поверхности носителя и удаленном формировании изображения поверхности носителя, диаметр точки и интервал расположения могут быть должным образом определены на основании разрешения оптических считывающих средств и оптимальной скорости вычисления.
[0101] Желательна установка интервала между опорными точками 4 в диапазоне от 0,3 мм до 0,5 мм в отношении необходимого количества информации касательно области формирования изображения и ложного распознавания различных типов точек, т.е. точек 2, 3, 4 и 12. Очевидно, что по мере того как точность печати, разрешение оптических считывающих средств и оптимальное время вычисления совершенствуются с развитием технологий, данный интервал стремится к нулю. В отношении ложного распознавания опорных точек 4 и информационных точек 3, смещение ключевой точки 2 предпочтительно составляет приблизительно 20% от интервала между опорными точками 4.
[0102] Интервал между информационной точкой 3 и виртуальной опорной точкой 5 предпочтительно составляет приблизительно от 15% до 30% расстояния между соседними виртуальными опорными точками 5 вследствие следующих причин. Если расстояние между информационной точкой 3 и виртуальной опорной точкой 5 меньше чем этот интервал, точки обычно распознаются как большие куски и вид точечного изображения ухудшается. Наоборот, если расстояние между информационной точкой 3 и виртуальной опорной точкой 5 больше чем этот интервал, то возникает трудность определения того, какая из соседних виртуальных опорных точек 5 является центром, на основании которого информационная точка 3 приобретает направление вектора.
[0103] Оптические считывающие средства (например, камера или сканер) используются для считывания точечного изображения согласно настоящему изобретению. Эти средства удерживаются в контакте с или на расстоянии от поверхности носителя с целью считывания точечного изображения в предопределенном местоположении или предопределенной области или на всей области. Альтернативно, средства проходят по длине линейно сформированного точечного изображения с целью его считывания.
[0104] То есть, оптические считывающие средства формируют изображение предопределенного местоположения или предопределенной области на поверхности носителя, упомянутого выше, а также считывает информацию, находящуюся на поверхности носителя. Альтернативно, камера с высокой разрешающей способностью формирует изображение всей поверхности носителя на предопределенном расстоянии от поверхности носителя, или сканер с высокой разрешающей способностью считывает информацию, находящуюся на всей поверхности носителя.
[0105] Посредством определения информации по точечному изображению достаточной длины можно определить огромное количество информации. В этом случае информация считывается посредством прохождения области на поверхности носителя, на которой сформировано точечное изображение.
[0106] То есть, информация считывается посредством прохождения вдоль линий, отображающих рисунки или графические изображения, видимым образом сформированные на поверхности носителя, или информация считывается посредством прохождения вдоль рамок фотографий или изображений или контуров объектов в фотографиях или изображениях. Альтернативно, существует возможность считывания информации посредством прохождения вдоль последовательностей символов на поверхности носителя.
[0107] Фиг.3 показывает примеры информационных точек точечного изображения и отображение двоичного разряда данных, определенного на них, а также другой вариант осуществления.
[0108] Следует принимать во внимание, что данный способ использует два типа информационных точек 3, при этом один тип выражает короткое расстояние (верхний ряд на фиг.3) от виртуальной опорной точки 5, полученной на основании опорной точки 4, а другой тип выражает длинное расстояние (нижний ряд на фиг.3) от виртуальной опорной точки 5, полученной на основании опорной точки 4 и при этом устанавливаются восемь векторных направлений. В настоящем случае могут быть выражены 4 бита. Длинное расстояние предпочтительно составляет приблизительно от 25% до 30% расстояния между соседними виртуальными опорными точками 5, а короткое расстояние предпочтительно составляет приблизительно от 15% до 20% данного расстояния. Следует отметить, что интервал между центрами информационных точек 3 с длинным/коротким расстоянием, предпочтительно длиннее диаметра точек.
[0109] Информационная точка 3 предпочтительно представляет собой одну точку, с точки зрения вида. Предпочтительным является увеличение количества информации независимо от вида, при этом существует возможность получения большего количества информации посредством выражения информационной точки 3 с использованием множества точек при назначении одного бита каждому вектору. Например, информационная точка 3, определенная по опорной точке 4, может выражать информацию 28 посредством векторов в восьми концентрических направлениях. Восемь информационных точек одной предопределенной информационной группы выражают информацию 264.
[0110] Фиг.4 показывает примеры информационных точек 3 и отображение двоичного разряда данных, определенного на них. На фиг.4 (а), (b) и (с) соответственно отображены две точки, четыре точки и пять точек.
[0111] Фиг.5 показывает модификации точечного изображения. На фиг.5 (а), (b) и (с) соответственно отображено изображение, содержащее 12 информационных точек 3, расположенных в области, изображение, содержащее 16 информационных точек 3, расположенных в области и изображение, содержащее 24 информационные точки 3, расположенные в области.
[0112] Точечное изображение 1 описанное выше и показанное на фиг.1 отображает пример, содержащий восемь информационных точек 3, расположенных в предопределенной информационной группе. Однако количество информационных точек 3, расположенных в предопределенной информационной группе, не ограничивается восьмью и может произвольным образом меняться. Например, данный способ использует изображение, содержащее 12 информационных точек 3, расположенных в одной предопределенной информационной группе ((а) на фиг.5), изображение, содержащее 16 информационных точек 3, расположенных в одной предопределенной информационной группе ((b) на фиг.5) и изображение, содержащее 24 информационных точки 3, расположенные в одной предопределенной информационной группе ((с) на фиг.5), в соответствии с количеством необходимой информации или разрешающей способности оптических считывающих средств.
[0113] Способ формирования потокового точечного изображения
Способ формирования потокового точечного изображения будет описан далее со ссылками на фиг.6 и 7.
[0114] Фиг.6 и 7 последовательно показывают стадии, в качестве примера, формирования потокового точечного изображения.
[0115] При формировании точечного изображения согласно настоящему изобретению, в отличие от стандартных точечных изображений, прежде всего множество опорных точек 4, располагают линейно и последовательно в частях, где информация должна вводиться/выводиться, в соответствии с видимой информацией на поверхности носителя на стадии 1.
[0116] Согласно (а) на фиг.6, опорные точки 4 располагаются по кривой. Однако расположение опорных точек 4 не ограничивается этим и может произвольным образом меняться с целью формирования точечных изображений в формах, соответствующих областям, в которых информация вводится/выводится. Например, точечное изображение может формироваться посредством смешивания прямых линий и кривых, или может формироваться в виде изображения ломаной линии посредством множества сегментов линии.
[0117] Кроме того, существует возможность расположения опорных точек 4 вдоль реальной линии, сформированной видимым образом на поверхности носителя или вдоль реальной линии согласно предопределенному правилу.
[0118] Следует отметить, что опорные точки предпочтительно располагаются на одинаковых интервалах с точки зрения улучшения точности считывания. Однако, настоящее изобретение не ограничивается этим. Существует возможность определения предопределенной информационной группы точечного изображения посредством смешивания множества интервалов, или возможность определения и предопределенной информационной группы точечного изображения и направления точечного изображения на основании расположения интервалов между тремя различными опорными точками предопределенной информационной группы.
[0119] На стадии 2 предоставлена первая виртуальная опорная линия 6, которая соединяет опорные точки 4, расположенные линейно. Согласно (b) на фиг.6, первая виртуальная опорная линия 6 выполнена в виде кривой. Однако, первая виртуальная опорная линия 6 не ограничивается этим. Существует возможность выполнения первой виртуальной опорной линии 6 в виде прямой линии для опорных точек 4, расположенных по кривой. Альтернативно, как показано на фиг.15, существует возможность выполнения первой виртуальной опорной линии 6 в виде кривой для опорных точек 4, расположенных линейно. Таким образом, существует возможность свободного определения первой виртуальной опорной линии 6, которая соединяет опорные точки, сформированные прямой линией или ломаной линией и/или кривой, в зависимости от местоположений, в которых вторые виртуальные опорные линии 7, виртуальные опорные точки 5 и информационные точки 3 расположены на стадиях 3-5.
[0120] Следует отметить, что, как показано на фиг.8, первая виртуальная опорная линия 6 в виде кривой предпочтительно сформирована в виде кривой Безье.
[0121] Прежде всего, предполагается, что опорные точки на первой виртуальной опорной линии представлены Р0 и Р3, а предоставленные контрольные точки представлены Р1 и Р2. Посредством данного способа затем можно получить точки Р4, Р5, и Р6, которые соответственно делят три сегмента линии Р0-P1, P1-Р2, и Р2-Р3, полученные посредством последовательного соединения контрольных точек при соотношении 1:1. Посредством данного способа получают точки Р7, и Р8, которые соответственно делят два сегмента линии Р4-Р5 и Р5-Р6, полученные посредством последовательного соединения точек Р7 и Р8 при соотношении 1:1.
[0122] Наконец, посредством данного способа получают точку Р9, которая делит сегмент линии Р7-Р8, соединяющий две точки при соотношении 1:1. Эта точка представляет собой точку на кривой Безье.
[0123] Посредством повторения данной процедуры, можно получить кривую Безье включая Р0, P1, Р2 и Р3 в качестве контрольных точек.
[0124] Следует отметить, что первая виртуальная опорная линия 6 не ограничивается кривой Безье и может быть выполнена с использованием различных типов алгоритмов, таких как сплайновая кривая, полученная посредством сплайн-функции, полиномиальной n-степени или эллиптической кривой.
[0125] Кроме того, существует возможность определения кривой для второй виртуальной опорной линии или четвертой виртуальной опорной линии (будет описано ниже) посредством использования того же способа, что использовался для первой виртуальной опорной линии.
[0126] На стадии 3 предоставлены вторые виртуальные опорные линии 7, определенные в предопределенных местоположениях относительно опорных точек 4, расположенных линейно и/или первой виртуальной опорной линии 6.
Согласно фиг.6 (с), вторые виртуальные опорные линии 7 выполнены таким образом, что проходят из соседних опорных точек 4 под произвольным углом в направлении предопределенного местоположения на линии перпендикулярной касательной к первой виртуальной опорной линии 6 в средней точке между соседними точками 4. Однако, вторые виртуальные опорные линии 7 не ограничиваются ими. Как будет показано ниже, поскольку виртуальные опорные точки выполнены в соответствии с областью, где информация должна вводиться/выводиться с использованием точечного изображения, вторые виртуальные опорные линии 7 могут определяться различными способами.
[0127] Кроме того, вторые виртуальные опорные линии 7 могут быть предусмотрены только с одной стороны относительно первой виртуальной опорной линии 6 с тем, чтобы определить направление точечного изображения, или могут быть предусмотрены с двух сторон для увеличения количества информации.
[0128] На стадии 4 множество виртуальных опорных точек 5, предусмотрено в предопределенных местоположениях на вторых виртуальных опорных линиях 7. Согласно фиг.7 (а), каждая опорная точка 5 предусмотрена в точке пересечения между вторыми опорными линиями 7, т.е. в вершине равнобедренного треугольника с прямой линией, соединяющей соседние опорные точки 4, в качестве основания и вторыми виртуальными опорными линиями 7 в качестве противолежащих сторон. Однако местоположение каждой виртуальной опорной точки 5 не ограничивается этим и может изменяться различным образом. Например, местоположение каждой виртуальной опорной точки 5 может быть предусмотрено в средней точке второй виртуальной опорной линии 7 или на опорной точке 4 в месте второй виртуальной опорной линии 7.
[0129] На стадии 5, информационные точки 3 располагаются в конечных точках, выраженных векторами, проходящими от виртуальных опорных точек 5 в качестве начальных точек. Согласно фиг.7 (b), информационные точки 3 располагаются в восьми векторных направлениях от виртуальных опорных точек 5 на равных расстояниях от виртуальных опорных точек 5, при этом одна информационная точка 3 предусмотрена для каждой виртуальной опорной точки 5. Однако, расположение информационных точек 3 не ограничивается этим. Существует возможность расположения множества информационных точек 3 в произвольных направлениях на произвольных расстояниях. Например, существует возможность расположения информационных точек 3 на виртуальных опорных точках 5, располагая их в 16 векторных направлениях или располагая две информационные точки 3 на одной виртуальной опорной точке 5.
[0130] Таким образом, потоковое точечное изображение согласно настоящему изобретению формируется на основании опорных точек, расположенных последовательно в линии, включая кривую, в отличие от стандартных точечных изображений, предлагаемых данным изобретателем, где опорные точки сформированы двухмерно в виде сетчатой структуры.
[0131] Это обеспечивает возможность формирования точечного изображения посредством предопределенной информационной группы в виде произвольной формы, совпадающей с информационной областью, видимым образом сформированной на поверхности носителя без ограничения формой прямоугольной области, где точечное изображение сформировано в виде двухмерного кода.
[0132] Следует отметить, что виртуальные опорные линии и виртуальные опорные точки согласно настоящему изобретению не обязательно напечатаны на поверхности носителя, однако они виртуально установлены в памяти изображений компьютера при подготовке точечного изображения или считывании точечного изображения.
Первый вариант осуществления
[0133] Различные модификации потоковых точечных изображений будут описаны ниже.
[0134] На фиг.9 (а) показан пример точечного изображения, используемого в настоящем изобретении.
[0135] В примере (а), показанном на фиг.9, предопределенная информационная группа точечного изображения 1 сформирована первой виртуальной опорной линией 6, опорными точками 4, вторыми виртуальными опорными линиями 7, виртуальными опорными точками 5, информационными точками 3, третьими виртуальными опорными линиями 8, боковыми точками 12 и четвертыми виртуальными опорными линиями 9.
[0136] Предопределенная информационная группа точечного изображения 1 определена боковыми точками 12, расположенными на третьей виртуальной опорной линии 8. Направление точечного изображения 1 определяется посредством расположения информационных точек 3, расположенных в направлении +Y (направление вверх), только в направлении X относительно виртуальных опорных точек 5 и расположения информационных точек 3, расположенных в направлении -Y (направление вниз), только в + направлении относительно виртуальных опорных точек 5.
[0137] Таким образом предопределенная информационная группа определяется посредством расположения боковых точек 12 на предопределенных интервалах. Если информационная точка 3 смещенная относительно виртуальной опорной точки 5 в направлении X, появляется на верхней стороне относительно первой виртуальной опорной линии 6, становится известно, что точечное изображение ориентировано вверх. Если появляется информационная точка 3, расположенная в + направлении, становится известно, что точечное изображение ориентировано вниз.
[0138] Существуют различные модификации средств определения направления точечного изображения по направлению смещения информационной точки от виртуальной опорной точки. Например, если три информационные точки, направления смещения которых от виртуальных опорных точек представляют собой + направление, существуют в предопределенной информационной группе на верхней стороне относительно первой виртуальной опорной линии, то становится известно, что точечное изображение ориентировано вверх. Если такие информационные точки не существуют, становится известно, что точечное изображение ориентировано вниз. Альтернативно, если область, не содержащая информационных точек, существует в предопределенной информационной группе, или размещается на виртуально опорной точке на верхней стороне относительно первой виртуальной опорной линии, то становится известно, что точечное изображение ориентировано вверх. Если все области содержащие информационные точки не расположены на виртуальных опорных точках и отделены от них посредством предопределенного расстояния, становится известно, что точечное изображение ориентировано вниз.
[0139] На фиг.9 (b) показан пример точечного изображения, используемого в настоящем изобретении.
[0140] В примере (b), показанном на фиг.9, предопределенная информационная группа точечного изображения 1 сформирована первой виртуальной опорной линией 6, опорными точками 4, вторыми виртуальными опорными линиями 7, виртуальными опорными точками 5, информационными точками 3, третьими виртуальными опорными линиями 8, боковыми точками 12 и четвертыми виртуальными опорными линиями 9.
[0141] Предопределенная информационная группа точечного изображения 1 определена боковыми точками 12, расположенными на третьими виртуальными опорными линиями 8. Кроме того, направление точечного изображения 1 определяется посредством установки различных интервалов H1 и Н2 между первой виртуальной опорной линией 6 (или опорной точкой 4) и боковыми точками 12 на верхней и нижней сторонах относительно первой виртуальной опорной линии 6.
[0142] Поэтому при распознавании данных изображения существует возможность распознавания направления точечного изображения независимо от направления формирования изображения относительно точечного изображения 1 посредством преобразования данных изображения с использованием алгоритма, причем, если предопределенная информационная группа определяется по боковым точкам 12 и определяется заранее таким образом, что когда область, в которой расстояние между опорной точкой 4 и боковой точкой 12 короче (H1) и оказывается на верхней стороне относительно первой виртуально опорной линии 6, то точечное изображение 1 ориентировано вверх, а если область, в которой расстояние длиннее (Н2) оказывается на верхней стороне, точечное изображение 1 ориентировано вниз.
[0143] На фиг.10 (а) показан пример точечного изображения, используемого в настоящем изобретении.
[0144] В примере (а), показанном на фиг.10, предопределенная информационная группа точечного изображения 1 сформирована первой виртуальной опорной линией 6, опорными точками 4, вторыми виртуальными опорными линиями 7, виртуальными опорными точками 5 и информационными точками 3.
[0145] Предопределенная информационная группа точечного изображения 1 определена интервалами расположения множества опорных точек 4, предусмотренных на первой виртуальной опорной линии 6. Кроме того, направление точечного изображения 1 определяется по смещению обоих информационных точек 3 от виртуальных опорных точек 5, расположенных на крайней слева стороне предопределенной информационной группы на верхней и нижней сторонах относительно первой виртуальной опорной линии 6 в направлении вниз.
[0146] Таким образом, если область, где интервал между опорными точками 4 наибольший, расположена на крайней слева стороне предопределенной информационной группы, причем оба направления смещения информационных точек 3 от виртуальных опорных точек 5, расположенных на крайней слева стороне предопределенной информационной группы, представляют собой направление вниз на верхней и нижней сторонах относительно первой виртуальной опорной линии 6, то становится известно, что точечное изображение 1 ориентировано вверх. Если оба описанные выше направления представляют собой направление вверх, становится известно, что точечное изображение 1 ориентировано вниз.
[0147] Следует отметить, что существует возможность улучшения точности распознавания направления точечного изображения посредством интерполяции с дополнительным упорядочиванием боковых точек, изменением количества информационных точек или устанавливанием областей с различными площадями на верхней и нижней сторонах относительно первой виртуальной опорной линии.
[0148] На фиг.10 (b) показан пример точечного изображения, используемого в настоящем изобретении.
[0149] В примере (b), показанном на фиг.10, предопределенная информационная группа точечного изображения 1 сформирована первой виртуальной опорной линией 6, опорными точками 4, вторыми виртуальными опорными линиями 7, виртуальными опорными точками 5, информационными точками 3, боковыми точками 12, третьими виртуальными опорными линиями 8 и четвертыми виртуальными опорными линиями 9.
[0150] Предопределенная информационная группа точечного изображения 1 определена ключевыми точками 2, смещенными вверх от первой виртуальной опорной линии 6. Кроме того, ключевые точки 2 расположены в направлении +Y относительно первой виртуальной опорной линии 6, при этом расстояние о г боковой точки 12 в направлении +Y короче, чем расстояние в направлении -Y.
При таком расположении известно, что направление точечного изображения 1 совпадает с правильным местоположением и точечное изображение 1 ориентировано вверх.
[0151] На фиг.11 (а) показан пример точечного изображения, используемого в настоящем изобретении.
[0152] В примере (а), показанном на фиг.11, предопределенная информационная группа точечного изображения 1 сформирована первой виртуальной опорной линией 6, опорными точками 4, вторыми виртуальными опорными линиями 7, виртуальными опорными точками 5, информационными точками 3, третьими виртуальными опорными линиями 8, боковыми точками 12 и четвертыми виртуальными опорными линиями 9.
[0153] Предопределенная информационная группа точечного изображения 1 определена боковыми точками 12, расположенными на третьих виртуальных опорных линиях 8. Кроме того, направление точечного изображения 1 определяется посредством расположения двух информационных точек 3, информация каждой из которых определяется по расстоянию и направлению от виртуальной опорной точки 5 в направлении вверх и посредством расположения одной информационной точки 3 в направлении вниз.
[0154] Таким образом, если две информационные точки 3 располагаются в направлении +Y, информационные точки в предопределенной информационной группе распознаются, тогда как направление группы распознается как совпадающее с правильным местоположением. Если одна информационная точка 3 размещается в направлении +Y, информационные точки 3 в предопределенной информационной группе могут распознаваться, тогда как направление группы, устанавливаемое посредством вращения вокруг ее центра на 180°, распознается как совпадающее с правильным местоположением.
[0155] Следует отметить, что направление точечного изображения может определяться посредством соответствующей установки различных расстояний (ширин сдвига) между информационными точками и виртуальными опорными точками на верхней и нижней сторонах относительно первой виртуальной опорной линии, при этом предопределенная информационная группа точечного изображения, очевидно, может определяться посредством расположения различных количеств информационных точек на верхней и нижней сторонах относительно первой виртуальной опорной линии.
[0156] Кроме того, информация может определяться посредством расположения информационных точек на нулевом расстоянии от некоторых виртуальных точек, расположенных на нижней стороне относительно первой виртуальной опорной линии, то есть на некоторых из виртуальных опорных точек.
[0157] Кроме того, группа точечного изображения в предопределенном направлении и ее направление могут определяться посредством обеспечения части, в которой информационная точка размещается на виртуальной опорной точке, находящейся лишь на одной - верхней или нижней стороне относительно первой виртуальной опорной линии.
[0158] На фиг.11 (b) показан пример точечного изображения, используемого в настоящем изобретении.
[0159] В примере, показанном на фиг.11, предопределенная информационная группа точечного изображения 1 сформирована первой виртуальной опорной линией 6, опорными точками 4, вторыми виртуальными опорными линиями 7, виртуальными опорными точками 5, информационными точками 3, третьими виртуальными опорными линиями 8, боковыми точками 12 и четвертыми виртуальными опорными линиями 9.
[0160] В примере, показанном на фиг.11 предопределенная информационная группа точечного изображения 1 определена боковыми точками 12, расположенными на третьих виртуальных опорных линиях 8. Кроме того, направление точечного изображения 1 определяется посредством размещения области расположения информационных точек лишь на одной из верхней и нижней сторон относительно первой виртуальной опорной линии 6.
[0161] Таким образом, предопределенная информационная группа определяется по боковым точкам 12, расположенным на предопределенных интервалах. Если информационные точки 3 и боковые точки 12 располагаются только в направлении вверх относительно первой виртуальной опорной линии 6, то таким образом, становится известно, что точечное изображение 1 ориентировано вниз, причем, если информационные точки 3 и боковые точки 12 располагаются только в направлении вниз, то становится известно, что точечное изображение 1 ориентировано вниз.
[0162] На фиг.12 (а) показан пример точечного изображения, используемого в настоящем изобретении.
[0163] В примере (а), показанном на фиг.12, предопределенная информационная группа точечного изображения 1 сформирована первой виртуальной опорной линией 6, опорными точками 4, вторыми виртуальными опорными линиями 7, виртуальными опорными точками 5, информационными точками 3 и ключевыми точками 2.
[0164] В примере (а), показанном на фиг.12, направление точечного изображения 1 и предопределенной информационной группы определяются по ключевым точкам 2. Таким образом, если ключевые точки 2 расположены в направлении вверх относительно первой виртуальной опорной линии 6, становится известно, что точечное изображение 1 ориентировано вверх. Если ключевые точки 12 расположены в направлении вниз, становится известно, что точечное изображение 1 ориентировано вниз.
[0165] Предопределенная информационная группа определяется по ключевым точкам 2, расположенным на предопределенных интервалах.
[0166] Следует отметить, что пример (а), показанный на фиг.12, показывает пример того, как, в частности, сформировано, точечное изображение с маленькой шириной потока, в котором виртуальные опорные точки 5 определены в средних точках между соседними опорными точками 4. Это изображение позволяет реальной линии 10 самой по себе содержать информацию.
[0167] Следует отметить, что существует возможность расположения не только опорных точек, а также и виртуальных опорных точек или информационных точек на или вдоль реальной линии, сформированной видимым образом на поверхности носителя.
[0168] На фиг.12 (b) показан пример точечного изображения, используемого в настоящем изобретении.
[0169] В примере (b), показанном на фиг.12, предопределенная информационная группа точечного изображения 1 сформирована первой виртуальной опорной линией 6, опорными точками 4, вторыми виртуальными опорными линиями 7, виртуальными опорными точками 5 и информационными точками 3.
[0170] Предопределенная информационная группа точечного изображения 1 определена интервалом расположения множества опорных точек 4, предусмотренных на первой виртуальной опорной линии. Направление точечного изображения 1 определяется посредством установки трех различных интервалов расположения между опорными точками 4.
[0171] Таким образом, предопределенные информационные группы определяются посредством расположения повторяющимся образом боковых точек 4 на больших, средних и малых интервалах расположения согласно предопределенному правилу. В этом случае, если интервалы опорных точек 4 появляются повторяющимся образом в порядке - большие, средние и малые интервалы от направления -X до + направления, то становится ясно, что направление совпадает с правильным местоположением и точечное изображение ориентировано вверх. Если вышеупомянутые интервалы появляются повторяющимся образом от направления + Х до направления -X, то становится понятно, что направление, устанавливаемое посредством вращения предопределенной информационной группы вокруг ее центра на 180°, совпадает с правильным местоположением и то, что точечное изображение ориентировано вниз.
[0172] На фиг.13 (а) показан пример точечного изображения, используемого в настоящем изобретении.
[0173] В примере (а), показанном на фиг.13, предопределенная информационная группа точечного изображения 1 сформирована первой виртуальной опорной линией 6, опорными точками 4, вторыми виртуальными опорными линиями 7, виртуальными опорными точками 5 и информационными точками 3.
[0174] Предопределенная информационная группа точечного изображения 1 определена интервалами расположения множества опорных точек 4, предусмотренных на первой виртуальной опорной линии 6. Направление точечного изображения 1 определяется по смещению информационных точек 3 от виртуальных опорных точек 5, расположенных на крайней слева стороне предопределенной информационной группы в разных направлениях относительно первой виртуальной опорной линии на двух противоположных сторонах.
[0175] Таким образом, область, где интервал между опорными точками 4 наибольший, соответствует крайней слева стороне предопределенной информационной группы. Если информационные точки 3 соответственно смещены от виртуальных опорных точек 5, при этом они расположены на крайней слева стороне предопределенной информационной группы в + направлении направления + Y относительно первой виртуальной опорной линии бив направлении X в направлении -Y, то становится известно, что точечное изображение ориентировано вверх. Если информационные точки 3 соответственно смещены в направлении X в направлении + Y и в + направлении в направлении -Y, то становится известно, что точечное изображение ориентировано вниз.
[0176] Следует отметить, что очевидно существует возможность улучшения точности распознавания направления точечного изображения интерполяцией посредством изменения количества информационных точек или устанавливанием областей с различными площадями на верхней и нижней сторонах относительно первой виртуальной опорной линии.
[0177] На фиг.13 (b) показан пример точечного изображения, используемого в настоящем изобретении.
[0178] В примере (b), показанном на фиг.13, предопределенная информационная группа точечного изображения 1 сформирована первой виртуальной опорной линией 6, опорными точками 4, вторыми виртуальными опорными линиями 7, виртуальными опорными точками 5 и информационными точками 3.
[0179] Предопределенная информационная группа точечного изображения 1 определена направлениями смещения информационных точек 3 от первых виртуальных опорных точек 5. Направление точечного изображения 1 определяется по смещению информационных точек 3 от виртуальных опорных точек 5 в разных направлениях на верхней и нижней сторонах относительно первой виртуальной опорной линии 6.
[0180] Таким образом, область, определенная как расположенная на крайней слева стороне предопределенной информационной группы, представляет собой область, где информационные точки 3 смещены в направлении X в направлении вверх относительно первой виртуальной опорной линии 6 и смещены в направлении + в направлении вниз. Альтернативно, предопределенная информационная группа определяется посредством смещения информационных точек 3 от виртуальных опорных точек 5 на предопределенный промежуток (периодичность, такая как X, +, +, + и + направления в направлении вверх относительно первой виртуальной линии 6 и +, X, X, X, и X направления в направлении вниз). В этом случае, если информационные точки 3 смещены в направлениях X, +, +, +, и + в направлении вверх относительно первой виртуально линии 6 и смещены в направлениях +, X, X, X, и X в направлении вниз от направления -X до направления +Х, то становится понятно, что точечное изображение 1 ориентировано вверх. Если информационные точки 3 соответственно смещены в направлениях +, X, X, X, и X в направлении вверх, а также в направлениях X, +, +, +, и + в направлении вниз, то становится известно, что точечное изображение 1 ориентировано вниз.
[0181] Фиг.14 представляет собой вид показывающий пример точечного изображения используемого в настоящем изобретении.
[0182] В примере, показанном на фиг.14, предопределенная информационная группа точечного изображения 1 сформирована первой виртуальной опорной линией 6, опорными точками 4, вторыми виртуальными опорными линиями 7, виртуальными опорными точками 5, информационными точками 3, третьими виртуальными опорными линиями 8, ключевыми точками 2, боковыми точками 12 и четвертыми виртуальными опорными линиями 9.
[0183] В примере, показанном на фиг.14, четыре боковые точки 12 расположены на третьей виртуальной опорной линии 8 для каждой предопределенной информационной группы с целью увеличения количества четвертых виртуальных опорных линий 9, количества виртуальных опорных точек 5 и количества информационных точек 3, таким образом увеличивая количество информации. Предопределенная информационная группа точечного изображения выражает 3 бита × 16=48 бит.
[0184] Следует отметить, что в примере, показанном на фиг.14, информационные точки 3 смещаются различным образом (в отношении расстояний от виртуальных опорных точек к информационным точкам) от виртуальных опорных точек 5 в направлении X и в направлении +. Это обеспечивает возможность осуществления определения, на основании не только направления смещения информационных точек, а также и на основании расстояний от информационных точек до виртуальных опорных точек. Это обеспечивает возможность точного распознавания информационных точек.
[0185] Следует отметить, что предпочтительно надлежащее определение, в соответствии с состоянием или условиями использования носителя со сформированным точечным изображением, того, необходимо ли выполнять точки незаметными посредством выравнивания ширин смещения точек или обеспечивать точное распознавание информационных точек посредством выполнения ширин смещения различными.
[0186] Фиг.15 показывает пример того, как первые виртуальные опорные линии определяются по расположению опорных точек.
[0187] На фиг.15 (а) показан пример, в котором опорные точки расположены в виде линии, при этом первая виртуальная опорная линия выполнена в виде прямой линии. На фиг.15 (b) показан пример, в котором опорные точки расположены линейно, при этом первая виртуальная опорная линия выполнена в виде кривой. На фиг.15 (с) показан пример, в котором опорные точки расположены линейно, при этом первая виртуальная опорная линия выполнена в виде ломаной линии. На фиг.15 (d) показан пример, в котором опорные точки расположены в виде кривой, при этом первая виртуальная опорная линия выполнена в виде прямой линии. На фиг.15 (е) показан пример, в котором опорные точки расположены в виде кривой, при этом первая виртуальная опорная линия выполнена в виде кривой. На фиг.15 (f) показан пример, в котором опорные точки расположены в виде кривой, при этом первая виртуальная опорная линия выполнена в виде ломаной линии.
[0188] Как описано выше, даже если расположение опорных точек остается неизменным, существует возможность определения первой виртуальной опорной линии различными способами. Это обеспечивает возможность формирования точечных изображений, которые образованы предопределенными информационными группами в виде различных форм в соответствии с информационными областями, видимым образом сформированными на поверхности носителя.
[0189] Следует отметить, что если первая виртуальная опорная линия выполнена в виде ломаной линии, то предпочтительно расположение опорных точек во всех вершинах с целью повышения точности считывания оптических считывающих средств.
[0190] Фиг.16 объясняет способы определения вторых виртуальных опорных линий, определенных по множеству опорных точек и/или первой виртуальной опорной линии для формирования треугольника с первой виртуальной опорной линией в качестве основания, которая является прямой линией, соединяющей соседние опорные точки.
[0191] Согласно фиг.16 (а), вторые виртуальные опорные линии 7, образующие треугольник, определяются расстоянием Р между соседними опорными точками. Таким образом, вторые виртуальные опорные линии 7 выполнены таким образом, чтобы пересекать выше среднюю точку между соседними опорными точками при установке высоты треугольника согласно предопределенному коэффициенту увеличения относительно интервала между опорными точками.
[0192] В примере, показанном на фиг.16 (а), высота каждого треугольника устанавливается равной длине, составляющей два расстояния Р между соседними опорными точками. Однако высота треугольника не ограничивается этим и может произвольным образом меняться.
[0193] Согласно (b) на фиг.16, вторые виртуальные опорные линии 7, образующие треугольник, определяются расстоянием Р между соседними опорными точками. Таким образом, вторые виртуальные опорные линии 7 выполнены таким образом, чтобы пересекать выше среднюю точку между соседними опорными точками при установке длин противоположных сторон треугольника согласно предопределенному коэффициенту увеличения относительно интервала между опорными точками.
[0194] В примере, показанном на фиг.16 (b), длина противоположных сторон треугольника устанавливается равной длине, составляющей два расстояния Р между соседними опорными точками. Однако длина противоположных сторон треугольника не ограничивается этим и может произвольным образом меняться.
[0195] Согласно (с) на фиг.16, вторые виртуальные опорные линии 7, образующие треугольник, определяются углом 8 при основании треугольника. Таким образом, значение угла при основании треугольника устанавливается заранее таким образом, чтобы обеспечить опорные точки в произвольных местоположениях на поверхности носителя, при этом вторые виртуальные опорные линии 7 предусмотрены для формирования и установки угла при основании.
[0196] Это обеспечивает возможность установки заранее области, где должна вводиться/выводиться информация, а также возможность установки угла при основании треугольника посредством обратного вычисления с целью расположения информационных точек в соответствующих точках. Таким образом, обеспечивается возможность осуществление способа точечного изображения в полной мере и удобным образом.
[0197] Следует отметить, что существует возможность использования правильного сочетания способов определения вторых виртуальных опорных линий 7 от (а) до (с) на фиг.16. Это может уменьшить количество ошибок, вызываемых расчетом местоположений виртуальных опорных точек.
[0198] Следует отметить, что для улучшения точности анализа/считывания предпочтительно обеспечение виртуальных опорных точек в вершинах треугольников.
[0199] Фиг.17 объясняет способы определения вторых виртуальных опорных линий по первой виртуальной опорной линии и/или множеству опорных точек в случае, если первая виртуальная опорная линия сформирована в виде кривой.
[0200] На фиг.17 (а) показан пример, где угол для обеспечения каждой второй виртуальной опорной линии устанавливается заранее относительно касательной к первой виртуальной опорной линии таким образом, чтобы обеспечить виртуальные опорные точки в произвольном местоположении на поверхности носителя, при этом каждая вторая виртуальная опорная линия 7 предусматривается для формирования угла наклона.
[0201] Согласно (b) на фиг.17, вторые виртуальные опорные линии 7 определяются по длине Q первой виртуальной опорной линии, сформированной посредством кривой, соединяющей соседние опорные точки. Таким образом, высота от касательной к первой виртуальной опорной линии устанавливается согласно предопределенному коэффициенту увеличения относительно длины, и вторые виртуальные опорные линии 7 выполняются от соседних опорных точек таким образом, чтобы пересекаться в местоположении, соответствующем высоте.
[0202] В примере, показанном на фиг.17 (b), высота от касательной к первой виртуальной опорной линии устанавливается равной длине Q первой виртуальной опорной линии, сформированной посредством кривой, соединяющей соседние опорные точки. Однако, высота не ограничивается этим и может произвольным образом меняться. Например, высота может устанавливаться равной длине, или четному кратному длины Q в заданной точке и нечетному кратному длинны Q в другой точке, таким образом, определяя направление точечного изображения или предопределенной информационной группы.
[0203] Согласно (с) на фиг.17, вторая виртуальная опорная линия 7 определяются по длине Q первой виртуальной опорной линии, сформированной посредством кривой, соединяющей соседние опорные точки. Таким образом, вторые виртуальные опорные линии 7 выполнены от соседних опорных точек таким образом, что длина каждой второй виртуальной опорной линии устанавливается согласно предопределенному коэффициенту увеличения относительно длины Q.
[0204] В примере, показанном на фиг.17 (с), длина второй виртуальной опорной линии 7 устанавливается согласно коэффициенту увеличения 1:1 относительно длины Q первой виртуальной опорной линии, сформированной посредством кривой, соединяющей соседние опорные точки. Однако, длина второй виртуальной опорной линии не ограничивается этим и может произвольным образом меняться. Например, длина может устанавливаться равной длине, или четному кратному длины Q в заданной точки и нечетному кратному длинны Q в другой точке, таким образом определяя направление точечного изображения или предопределенной информационной группы.
[0205] Очевидно, что существует возможность использования правильного сочетания способов, показанных от (а) до (с) на фиг.17. Таким образом, может определяться прямая линия перпендикулярная к касательной в средней точке первой виртуальной линии, сформированная в виде кривой, при этом вторые виртуальные опорные линии и виртуальные опорные точки могут определяться посредством сочетания способов описанных выше.
[0206] На фиг.18 (а) показан пример способа определения второй виртуальной опорной линии в случае, если первая виртуальная опорная линия выполнена в виде ломаной линии.
[0207] Если первая виртуальная опорная линия 6 выполнена в виде ломаной линии, то вторая опорная линия 7 предпочтительно представляет собой прямую линию, делящую внутренний угол в вершине, образованной первой виртуальной опорной линией 6, на два равных угла.
[0208] Таким образом, как показано данным примером, показанным на фиг.18 (а), вторая виртуальная опорная линия 7 предпочтительно выполнена таким образом, что углы α и β, образованные первой виртуальной опорной линией 6 и второй виртуальной опорной линией 7, приобретают значения, удовлетворяющие выражению α+β=180°.
[0209] Это обеспечивает возможность определения каждой виртуальной опорной точки посредством интерполяции согласно данному уравнению, таким образом, обеспечивая возможность более точного извлечения информационной точки.
[0210] Следует отметить, что этот способ можно применять при определении третьей виртуальной опорной линии.
[0211] На фиг.18 (b) (1) показан пример, в котором опорные точки всегда расположены на вершинах первой виртуальной опорной линии.
[0212] Первая виртуальная опорная линия представляет собой виртуальную линию, сформированную в виде прямой линии, ломаной линии и/или кривой, соединяющей множество опорных точек. Как показано на фиг.18 (b) (2), доступен способ определения первой виртуальной опорной линии по ломаной линии посредством предопределенного алгоритма с целью обеспечения точек для сравнения различных типов обработки (например, обеспечение виртуальных опорных точек) вдобавок к опорным точкам. Однако, как показано на фиг.18 (b) (1), первая виртуальная опорная линия, сформированная ломаной линией в данном изобретении, предпочтительно выполнена таким образом, что только части, в которых расположены опорные точки, являются вершинами первой виртуальной опорной линии.
[0213] Это обеспечивает возможность соединения соседних опорных точек одной прямой линией и таким образом, становится возможным предотвращение уменьшения скорости анализа и считывания точечного изображения вследствие использования сложного алгоритма.
[0214] Фиг.19 показывает пример способа определения вторых виртуальных опорных линий.
[0215] На фиг.19, (а) показаны средние точки между соседними опорными точками. На фиг.19, (b) показан пример, в котором вторые виртуальные опорные линии 7 выполнены на опорных точках.
[0216] В этом случае вторые виртуальные опорные линии предпочтительно представляют собой прямые линии перпендикулярные первой виртуальной опорной линии в средних точках между соседними опорными точками.
Фиг.20 показывает пример, в котором вторые виртуальные опорные линии 7 выполнены таким образом, чтобы быть перпендикулярными первой виртуальной опорной линии, сформированной в виде прямой линии, или быть перпендикулярными к касательным к первой виртуальной опорной линии, сформированной в виде кривой.
[0217] Существуют различные виды модификаций способа определения вторых виртуальных опорных линий. Например, существует возможность формирования точечного изображения в полной мере и удобным способом посредством правильного комбинирования и использования этих способов определения в соответствии с областью, где необходим ввод/вывод информации.
[0218] Фиг.21 показывает пример, в котором множество виртуальных опорных точек предусмотрены в предопределенных местоположениях на вторых виртуальных опорных линиях на постоянном расстоянии от первой виртуальной опорной линии, сформированной в виде прямой линии, или от касательных к первой виртуальной опорной линии, сформированной в виде кривой.
[0219] Таким образом, расстояния Н от первой виртуальной опорной линии или касательные к первой виртуальной опорной линии к виртуальным опорным точкам уравниваются, как показано на фиг.21, независимо от того остается ли способ определения вторых виртуальных опорных линий таким же для каждой предопределенной информационной группы каждого точечного изображения или каждой опорной точки и/или каждой первой опорной линии в каждой предопределенной информационной группе.
[0220] Это обеспечивает возможность использования способа определения вторых виртуальных линий в соответствии с областью, где информация должна вводиться/выводиться, таким образом уравнивая местоположения информационных точек до предопределенной высоты.
[0221] На фиг.22 (а) показан пример, в котором все точки сами по себе сформированы таким образом, чтобы образовывать полигональную форму, которая может определять направление, главным образом, вместо круглой формы, при этом направление точечного изображения 1 определяется но разнице формы.
[0222] На фиг.22 (а) показан пример, в котором точки сформированы в виде треугольных форм. Существует возможность определения направления точечного изображения различными способами. Например, существует возможность определения направления точечного изображения в зависимости от того, в каком направлении точка треугольной формы сформирована на одной стороне треугольника, которая параллельна первой виртуальной опорной линии 6 или четвертой виртуальной опорной линии 9 (в примере показанном на фиг.22 (а), поскольку точка сформирована в направлении +Y со стороны, точечное изображение 1 может распознаваться при распознавании соответствующего направления, как совпадающая с правильным местоположением). Альтернативно, если вершина треугольника, перекрывающего вторую опорную линию 7 или третью виртуальную опорную линию 8, расположена в направлении +Y, соответствующее направление рассматривается как совпадающее с правильным местоположением точечного изображения 1.
[0223] На фиг.22 (b) показан пример, в котором нормальные круглые точки и полигональные точки существуют вместе.
[0224] Каждая полигональная точка в примере, показанном на фиг.22 (b), имеет квадратную форму и, таким образом, направление точечного изображения 1 не может быть определено. Однако, возможно определение направления точечного изображения 1 посредством комбинирования и использования боковых точек 12 и ключевых точек 2.
[0225] Существует возможность изменения форм всех точек, используемых в данном изобретении, которое не ограничивается опорными точками и информационными точками. Например, существует возможность расположения нормальных круглых точек в качестве опорных точек 4 и ключевых точек 2, а расположение полигональных точек, которые могут определять направление, в качестве информационных точек 3 и боковых точек 12. Очевидно, что кроме того, предопределенная информационная группа может одновременно включать круглые точки и полигональные точки.
[0226] На фиг.23 (а) и (b) показан пример, в котором направление точечного изображения и предопределенной информационной группы определяется по изменению размера самой точки, по мере необходимости.
[0227] Согласно (а) на фиг.23, предопределенная информационная группа точечного изображения 1 и направление точечного изображения 1 определяются посредством использования треугольной точки, отличающейся по размеру от остальных точек, в качестве одной из множества опорных точек 4. Согласно (b) на фиг.23, предопределенная информационная группа точечного изображения 1 определяется посредством расположения в качестве опорных точек 4 круглых точек, отличающихся по размеру от остальных точек, тогда как направления точечного изображения 1 определяется посредством расположения только в направлении +Y информационных точек 3, отличающихся по размеру от остальных информационных точек 3.
[0228] Очевидно, что при использовании способа определения предопределенной информационной группы и направления точечного изображения посредством изменения размеров и форм самих точек, показанных на фиг.22 и 23, существует возможность изменения размеров и форм некоторых или всех точек, при необходимости, в соответствии с различными условиями, включая алгоритм генерирования и анализа точечных изображений и точность считывающего устройства.
[0229] Фиг.24 показывает примеры, в которых направление точечного изображения предопределенная и информационная группа точечного изображения определяются посредством расположения различных количеств виртуальных опорных точек на двух сторонах относительно первой виртуальной опорной линии.
[0230] Согласно (а) на фиг.24 в направлении +Y вторые виртуальные опорные линии выполнены под предопределенными углами относительно соседних опорных точек таким образом, что они пересекают друг друга на перпендикулярной линии в средней точке между соседними опорными точками, при этом виртуальные опорные точки 5 располагаются на вторых виртуальных опорных линиях. В направлении -Y вторые виртуальные опорные линии выполнены таким образом, чтобы проходить через опорные точки и пересекать первую виртуальную опорную линию под прямыми углами, при этом виртуальные опорные точки 5 располагаются на вторых виртуальных опорных линиях.
[0231] При таком расположении, когда считывающее устройство распознает точечное изображения, виртуальная опорная точка 5 определяется по меньшей мере по двум опорным точкам. В этом случае, если количество опорных точек 5 меньшее чем количество виртуальных опорных точек 5, выполненных на противоположной стороне первой виртуальной опорной линии, появляется в направлении +Y, то существует возможность определения направления точечного изображения при распознавании соответствующего направления как совпадающего с правильным местоположением. Если виртуальные опорные точки 5 (по количеству меньше чем виртуальные опорные точки на противоположной стороне) появляются в направлении -Y относительно первой виртуальной опорной линии, то существует возможность определения направления точечного изображения при распознавании направления устанавливаемого посредством вращения соответствующего точечного изображения вокруг его центра на 180°, как совпадающего с правильным местоположением.
[0232] На фиг.24 (b) показана модификация, в которой одна виртуальная опорная точка 5 предусмотрена для одной опорной точки в направлении +Y относительно первой виртуальной опорной линии, и одна виртуальная опорная точка 5 предусмотрена для трех опорных точек в направлении -Y. На фиг.24 (с) показан пример, в котором часть, где одна виртуальная опорная точка 5 предусмотрена для одной опорной точки, при этом на каждой из двух сторон относительно первой виртуальной опорной линии находится точка для определения предопределенной информационной группы точечного изображения, при этом направление точечного изображения определяется посредством расположения различных количеств виртуальных опорных точек 5 на верхней и нижней сторонах относительно первой виртуальной опорной линии (предопределенная информационная группа включает три виртуальные опорные точки 5 в направлении +Y и четыре виртуальные опорные точки в направлении -Y).
[0233] Очевидно, как описано выше, существует возможность изменения способа определения виртуальных опорных точек в предопределенной информационной группе, если необходимо, а также задания местоположений, в которых виртуальные опорные точки располагаются в соответствии с видимой информацией на поверхности носителя.
[0234] Фиг.25 представляет собой вид показывающий пример точечного изображения вдоль реальной ломаной линии.
[0235] Когда реальная линия 10 формирует угол, то есть, интервал между двумя линиями с общей крайней точкой, точечные изображения 1 предпочтительно прерываются.
[0236] Это может предотвращать операцию ошибочного ввода/вывода при считывании вблизи крайней точки, вследствие считывания информационной точки, расположенной вблизи считываемой информационной точки, вместо нее, если точечные изображения сформированы последовательно.
[0237] Следует отметить, что если считываемая информационная точка считывается ошибочно вместе с соседней информационной точкой, операция ввода/вывода вблизи крайней точки может проходить посредством привязки к предопределенной информации при определении того, что считываемые точки не сочетаются с алгоритмом генерирования точечного изображения.
[0238] Фиг.26 показывает примеры расположений ключевых точек согласно данному изобретению.
[0239] Согласно (а) на фиг.26, направление точечного изображения и предопределенная информационная группа определяются посредством смещения одной из множества опорных точек, расположенных линейно, в наклонном направлении относительно первой виртуальной опорной линии.
[0240] Таким образом, предопределенная информационная группа точечного изображения определяется посредством расположения ключевой точки 2 в наклонном направлении вверх и влево от местоположения, в котором опорная точка должна располагаться в примере, показанном на фиг.26 (а), вместо расположения опорной точки в местоположении, в котором она должна располагаться. Направление точечного изображения определяется посредством распознавания как совпадающего с правильным местоположением, направления, в котором ключевая точка 2 располагается, если она располагается в смещенном направлении.
[0241] Согласно (b) на фиг.26, предопределенная информационная группа и направление точечного изображения определяются посредством расположения ключевой точки 2 или ключевых точек 2, расположенных на поверхности носителя, которая расположена слева в примере показанном на фиг.26 (b), в направлении параллельном направлению второй виртуальной опорной линии, и расположения ключевой точки 2, расположенной справа в примере показанном на фиг.26 (b), в направлении, перпендикулярном направлению второй виртуальной опорной линии.
[0242] Таким образом, ключевая точка 2, расположенная слева, показанная на фиг.26 (b), располагается в направлении, параллельном направлению второй виртуальной опорной линии в направлении +Y с целью определения предопределенной информационной группы и направления точечного изображения. И наоборот, ключевая точка 2, расположенная справа, показанная на фиг.26 (b), располагается в направлении перпендикулярном направлению второй виртуальной опорной линии с целью определения предопределенной информационной группы. В этом случае, поскольку ключевая точка 2 смещена в направлении +Х от местоположения, в котором должна располагаться опорная точка, направление точечного изображения может определяться посредством распознавания соответствующего направления, как совпадающего с правильным местоположением.
[0243] Согласно (с) на фиг.26, предопределенная информационная группа и направление точечного изображения определяются посредством расположения ключевой точки 2, расположенной на поверхности носителя, в предопределенном местоположении на третьей виртуальной опорной линии.
[0244] Таким образом, предопределенная информационная группа определяется посредством расположения ключевой точки 2 на третьей виртуальной опорной линии, как прямая линия, перпендикулярная к касательной к кривой, образующей первую виртуальную опорную линию. Направление точечного изображения определяется посредством распознавания как совпадающего с правильным местоположением, направления, в котором ключевая точка 2 располагается, в зависимости от того, в каком местоположении на третьей виртуальной опорной линии ключевая точка 2 располагается относительно первой виртуальной опорной линии, в частности, в зависимости от того, располагается ли ключевая точка 2 в направлении +Y в примере, показанном на фиг.26 (с).
[0245] На фиг.26 (d) показан пример, в котором вторые виртуальные опорные линии определяются только по опорным точкам, кроме тех опорных точек, которые смещаются как ключевые точки.
[0246] Таким образом, вторая виртуальная опорная линия не определяется по опорной точке, расположенной перед ней в качестве ключевой точки 2 слева в примере, показанном на фиг.26 (d), тогда как вторая виртуальная опорная линия определяется по опорной точке, расположенной перед ней в качестве ключевой точки 2 справа в примере, показанном на фиг.26 (d).
[0247] При таком расположении, другие точки, такие как информационные точки, не располагаются вблизи ключевой точки 2. Это может предотвратить ошибочное распознавание ключевых точек и других точек.
[0248] Фиг.27 объясняет примеры расположений боковых точек согласно данному изобретению.
[0249] Согласно (а) на фиг.27, предопределенная информационная группа и направление точечного изображения определяются посредством расположения боковой точки 12 на третьей виртуальной опорной линии, проходящей через опорную точку. Таким образом, предопределенная информационная группа определяется посредством добавления точки с одновременным сохранением расположения опорных точек, в отличие от ключевой точки, описанной выше. Направление точечного изображения определяется посредством размещения боковой точки 12 лишь на одной из верхней и нижней сторон относительно первой виртуальной опорной линии.
[0250] На фиг.27 (b) показан пример, в котором предоставлена червертая виртуальная опорная линия, которая является прямой линией проходящей через боковую точку 12 и параллельной первой виртуальной опорной линии, при этом виртуальные опорные точки выполнены на предопределенных интервалах на четвертой виртуальной опорной линии. Посредством определения виртуальных опорных точек с использованием как вторых, так и четвертых виртуальных опорных линий можно улучшить точность считывания.
[0251] На фиг.27 (с) показан пример, в котором предопределенная информационная группа и направление точечного изображения определяются посредством расположения боковых точек 12 на двух сторонах первой виртуальной опорной линии на различных расстояниях от первой виртуальной опорной линии. На фиг.27 (d) показан пример, в котором направление точечного изображения определяется по ключевой точке, полученной посредством смещения опорной точки вверх по третьей виртуальной опорной линии, расстояниям между ключевой точкой и боковыми точками 12, расположенными с двух сторон первой виртуальной опорной линии на одинаковых расстояниях от первой виртуальной опорной линии, при этом предопределенная информационная группа определяется по интервалам между боковыми точками 12 и ключевой точкой.
[0252] Как описано выше, существуют различные модификации расположения боковых точек, которые могут определять предопределенную информационную группу, направление точечного изображения, четвертые виртуальные опорные линии и подобное, при этом в расположение могут быть свободно внесены изменения в рамках объема данного изобретения.
[0253] Фиг.28 представляет собой вид, показывающий пример того, как значение координат XY центра точечного изображения, зафиксированного оптическими считывающими средствами.
[0254] При получении значений координат XY центра зафиксированного изображения, значения координат центра координат точечного изображения получают в первую очередь.
[0255] Характерное значение координат точечного изображения, которое определяет одно значение координат, представлено посредством (Х0, Y0) в точечной системе координат и представлено посредством (х0, y0) в системе координат формирования изображения.
[0256] Кроме того, полагая, что Kx является приращением значения координаты X, а Кy является приращением значения координаты Y, значение (Xn+1, Yn+1) может быть представлено в виде:
Xn+1=Xn+Kx
Yn+1=Yn+Ky
Таким образом, значения координат XY центра зафиксированного изображения, представлены следующим уравнением:
где n - количество опорных точек между первой точкой из множества опорных точек, определяющих один набор значений координат, и начальной точкой опорных точек, определяющих значения координат, последовательно расположенных после набора значений координат.
[0257] Кроме того, α - это коэффициент, отображающий приращение координаты у в системе координат зафиксированного изображения относительно расстояния Δх между опорными точками точечного изображения в системе координат зафиксированного изображения, а αΔх относится к приращению Ку координаты Y в точечной системе координат.
[0258] Следует отметить, что не всегда требуется формирование точечного изображения в местоположении αΔх над точечным изображением на фиг.28.
[0259] При использовании одномерного точечного изображения, определяемого значениями координаты X, кодовые значения могут определяться в области, где определены значения координаты Y.
[0260] При таком расположении, расположение точечного изображения вдоль реальной линии может обеспечить векторную информацию, сформированную различными сегментами линии, такую как САПР чертежи, буквы/символы/графику, контуры карты и дорожную информацию. Это обеспечивает возможность печати электронной векторной информации, такой как DTP информация, САПР информация или картографическая информация на носителе.
[0261] Например, в случае САПР, как правило, технически невозможно получить электронную векторную информацию посредством копирования изображения. Применение данного изобретения к САПР обеспечивает возможность генерирования электронной информации для САПР посредством считывания всего изображения оптическими считывающими средствами.
[0262] Кроме того, данное изобретение (потоковые точки) позволяет определять значения координат Z. Это обеспечивает возможность выражения трехмерных координат.
[0263] Таким образом, становится возможным считывание информации в любом местоположении на карте посредством использования потоковых точек для контуров карты. Кроме того, печать точек на стереоскопической поверхности позволяет считывать и воспроизводить соответствующую стереоскопическую форму.
[0264] Краски, используемые для потокового точечного изображения согласно данному изобретению, а также для видимого напечатанного оттиска на поверхности носителя будут описаны далее.
[0265] Краска, используемая для печати точек потокового точечного изображения, предпочтительно является скрытой краской (невидимой краской), которая поглощает инфракрасное излучение, или черной краской. Краска, используемая для печати стандартной графики и текста, предпочтительно является нечерной краской, отражающей или пропускающей инфракрасное излучение.
[0266] Существует возможность печати точечного изображения с использованием всех типов принтеров от офсетного принтера до струйного принтера лишь посредством добавления одного этапа печати точек к стандартным этапам печати без необходимости применения особых способов печати.
[0267] Точечное изображение, образованное мелкими точками, каждая из которых имеет диаметр 0,04 мм (приблизительно 0,05 мм в случае струйного принтера) трудно заметить. Использование бесцветной прозрачной скрытой краски, поглощающей в инфракрасном диапазоне, разработанной для получения высококачественного результата, может сделать точки полностью невидимыми.
[0268] Следует отметить, что информационные точки, как правило, выполнены на одинаковых расстояниях от виртуальных опорных точек с тем, чтобы сделать точки незаметными. Однако, при высокоточном распознавании информационных точек посредством выражения информации с использованием длин, а также направлений, информация может определяться различными расстояниями в соответствующих виртуальных опорных точках.
[0269] Если краску и этапы печати не менять вообще (четырехкрасочная печать), то из всех цветов - С(голубой), М(пурпурный), У(желтый), и К(черный) - для печати точек используются краска К (черный). В данном случае краски С, М, и Y могут использоваться для СПАР чертежей, букв/символов/графики, карт, фотографий и графических изображений, при этом краска К может использоваться для печати точек па них. Черный цвет выражается посредством составного черного, полученного на 100% посредством смешивания красок С, М, и Y. Однако, поскольку идеально черный цвет не может быть воспроизведен, ему не придается особое значение. Это может приводить к размытому изображению. Кроме того, область, в которой печатаются точки, становится полутоновым точечным изображением, поскольку точки печатаются К краской. Если взглянуть ближе на эту область, можно заметить слегка сероватое изображение. Для решения данной проблемы, точки могут печататься лишь в минимально необходимой области, и краски С, M, Y, и К могут применяться для области, где точки не печатаются, как и в общепринятых способах. Однако, это позволяет сканеру охватывать лишь ограниченную область, в которой напечатаны точки.
[0270] Кроме того, поскольку этот способ использует краски, которые реагируют в инфракрасном диапазоне и не позволяет осуществлять копирование, существует возможность обеспечения высокого уровня защиты. Носитель печати не ограничивается какой-либо специфической бумагой, применяемой при печати. Существует возможность печати точек на любом типе бумаги, например, бумаге для художественной печати, матовой бумаге, высококачественной бумаге, простой бумаге, газетной бумаге, фотобумаге или бумаге для принтера. Кроме того, существует возможность печати на любом носителе, отличающемся от бумаги, при условии, что носитель не расширяется или не сжимается.
[0271] При этом способе существует возможность использования любых типов носителей, таких как газетная бумага, простая бумага и полиэфирный материал, и использования способа печати, такого как офсетная печать и печать на ротационной печатной машине, УФ печать и печать с использованием струйного принтера. Таким образом, способ обладает очень высокой степенью свободы при печати.
[0272] Следует отметить, что сканер, который считывает точечные коды, может осуществлять обработку от формирования точечного изображения до анализа точечных кодов всего лишь за 0,1 - 0,2 с. Это обеспечивает возможность непрерывного доступа к информации без каких-либо трудностей.
[0273] Другие примеры расположения точечного изображения будут описаны далее со ссылками на фиг.29-31.
[0274] На фиг.29 (а) показан пример, в котором виртуальные опорные точки 5 расположены на опорных точках 4 на первой виртуальной опорной линии вместо вторых виртуальных опорных линий. На фиг.29 (b) показан пример, в котором виртуальные опорные точки 5 расположены на опорных точках 4 на первой виртуальной опорной линии, а также на вторых виртуальных опорных линиях.
[0275] Согласно (а) на фиг.29, существует возможность экономии времени на поиск вторых виртуальных опорных линий и повышения скорости считывания. Согласно (b) на фиг.29, существует возможность увеличения количества информации.
[0276] На фиг.29 (с) и (d) показан пример, в котором опорные точки 4 расположены на виртуальных опорных точках 5, выполненных на вторых виртуальных опорных линиях. Согласно (с) на фиг.29, на виртуальных опорных точках 5 точки не расположены. Такое расположение иногда приводит к небольшим задержкам и ошибкам при распознавании и анализе данных изображения, считываемого оптическими считывающими средствами, в сравнении с расположением, при котором опорные точки дополнительно расположены на виртуальных опорных точках 5, как показано на фиг.29 (d). При расположении опорных точек 4 на виртуальных опорных точках 5, как показано на фиг.29 (d), также обеспечивается возможность определения виртуальных опорных точек 5 на основании недавно расположенных опорных точек 4 и более точного осуществления анализа распознавания данных изображения.
[0277] Следует отметить, что первая виртуальная опорная линия может быть выполнена посредством соединения недавно расположенных опорных точек 4, или могут быть определены вторые виртуальные опорные линии.
[0278] На фиг.30 (а) - (с) показано сравнение между случаем, в котором на виртуальных опорных точках не расположены опорные точки и случаем, в котором на виртуальных опорных точках расположены опорные точки.
[0279] Как показано на фиг.30 (а), когда на виртуальных опорных точках 5 не располагаются опорные точки, то необходимо обеспечить виртуальные опорные точки 5 посредством определения вторых виртуальных опорных линий и четвертых виртуальных опорных линий по опорным точкам 4, расположенным на первой виртуальной опорной линии и боковым точкам, расположенным на третьих виртуальных опорных линиях. Чем большая область формирует предопределенную информационную группу, тем труднее найти виртуальные опорные точки 5.
[0280] Наоборот, посредством расположения опорных точек 4 на виртуальных опорных точках 5, как в примере, показанном на фиг.30 (b), также можно определить вторые виртуальные опорные линии по недавно расположенным опорным точкам 4. Это обеспечивает возможность более точного поиска виртуальных опорных точек 5.
[0281] Очевидно, существует возможность определения вторых виртуальных опорных точек посредством расположения множества опорных точек на двух линиях с целью поиска виртуальных опорных точек. Например, в примере, показанном на фиг.30 (b), четвертые виртуальные опорные линии, расположенные на верхнем и нижнем концах предопределенной информационной группы, могут устанавливаться как первые виртуальные опорные линии (без предоставления каких-либо виртуальных опорных точек или без расположения информационных точек).
[0282] Очевидно, что опорные точки всегда могут быть расположены на всех виртуальных опорных точках, как показано на фиг.30 (с).
[0283] Стадия обеспечения виртуальных опорных точек в предопределенных местоположениях, в которых опорные точки, расположенные на виртуальных опорных точках, соединяются в опорные точки, расположенные на первой виртуальной опорной линии, будет описана далее со ссылкой на фиг.31 (а)-(с).
[0284] Прежде всего, линии, соединяющие опорные точки 4, расположенные на виртуальных опорных точках 5, и опорные точки 4, расположенные на первой виртуальной опорной линии, выполнены, как показано на фиг.31 (а). Как показано на фиг.31 (b), новые виртуальные опорные точки 5 выполнены в точках пересечения между выполненными линиями и четвертыми виртуальными опорными линиями, определенными по боковым точкам, расположенным на третьих виртуальных опорных линиях.
[0285] Как показано на фиг.31 (с), затем располагаются информационные точки, которые определяют информацию по расстояниям и направлениям от недавно выполненных виртуальных опорных точек 5.
[0286] Очевидно, что при увеличении количества информации, определяемой одной предопределенной информационной группой, опорные точки 4 могут далее располагаться на недавно выполненных виртуальных опорных точках 5, как показано на фиг.31 (b), при этом виртуальные опорные точки 5 могут быть также выполнены в предопределенных местоположениях, в которых недавно расположенные точки 4 соединяются с опорными точкам 4, расположенными на первой виртуальной опорной линии.
[0287] Как описано выше, потоковое точечное изображение согласно данному изобретению позволяет определять информацию по количеству, подобно определению при стандартном точечном изображении, одновременно формируя точечное изображение вдоль реальной линии, включая кривую или на изогнутой поверхности тела, такого как шар.
[0288] Следует отметить, что также существует возможность обеспечения виртуальных опорных точек между опорными точками, расположенными линейно, а также возможность расположения точек в произвольных местоположениях в предопределенной информационной группе посредством алгоритма генерирования точечного изображения.
[0289] Фиг.32 и 33 объясняют взаимоотношение между точечными изображениями, кодовыми значениями и идентификаторами.
[0290] В точечном изображении, показанном на фиг.32 (а), предопределенная информационная группа образована 2×5 областями. Данная предопределенная информационная группа разделена на диапазоны от С1-0 до С19-18. На фиг.32 (b) показан формат точечного кода каждой области.
[0291] На фиг.32 (b) показан случай, в котором точечное изображение образовано только кодовыми значениями. В диапазоне С0-С17 зарегистрированы кодовые значения соответствующих точечных кодов точечного изображения в соответствующих областях, показанные на фиг.32 (а). В С18 и С19 зарегистрированы четные значения.
[0292] Согласно (с) на фиг.32, значения координат XY регистрируются вместе с кодовыми значениями. Таким образом, согласно (а) на фиг.32 значения координаты X регистрируются в диапазоне С0 - С7, значения координаты Y регистрируются в диапазоне С8 - С15, а кодовые значения регистрируются в диапазоне С16 - С19.
[0293] Как описано выше, в данном варианте осуществления в точечном изображении значения координат XY могут регистрироваться вместе с кодовыми значениями.
[0294] Кроме того, на фиг.32, (d) показан формат, который регистрирует значения координаты Z вместе со значениями координат XY. Как описано выше, точечное изображение согласно данному изобретению может использовать очень гибкий формат, как в случае, в котором регистрируются только кодовые значения, в случае, в котором регистрируются кодовые значения и координаты XY, и в случае, в котором регистрируются значения координаты Z вместе с координатными значениями XY.
[0295] Следует отметить, что кодовое значение отображает активный код и/или индекс, при этом активный код отображает способ обработки, а индекс отображает предопределенную область.
[0296] Кроме того, индекс включает координатный указатель, который отображает область, в которой регистрируется номер страницы бумаги, как носителя или подобного. В этой области существует возможность регистрирования идентификатора, идентифицирующего сам носитель, где в качестве точечного изображения регистрируются значения координат XY или номер страницы.
[0297] На фиг.32 (е) - (g) показаны другие модификации формата.
[0298] Взаимоотношение между точечными изображениями, кодовые значения и идентификаторы будут описаны далее со ссылкой на фиг.33.
[0299] Согласно точечному изображению, показанному на фиг.33 (а), предопределенная информационная группа точечного изображения и ее направление определяются посредством размещения предопределенной точки (ключевой точки или боковой точки), в отличие от случая, показанного на фиг.32 (а), в котором предопределенная информационная группа точечного изображения и ее направление определяются посредством смещения направления каждой информационной точки от виртуальной опорной точки. Это позволяет точечному изображению иметь смещения в восьми направлениях для одной информационной точки, то есть, иметь количество информации в размере 3 битов.
[0300] На фиг.33 (b) показан случай, в котором точечное изображение образовано только значениями координат XYZ. В этом точечном изображении значения координаты X регистрируются в диапазоне С0-С8, значения координаты Y регистрируются в диапазоне С9-С17, а значения координаты Z регистрируются в диапазоне С18-С26.
[0301] Как описано выше, использование точечного изображения согласно данному изобретению может сочетаться со значениями координаты Z и другими системами координат (например, цилиндрическая система координат или система широты/долготы) а также значениями координат XY
[0302] Другие модификации формата могут быть модификациями, показанными на фиг.22 (с) - (g) и подобными. Такие форматы не ограничиваются форматами, показанными на фиг.33. Очевидно, что существует возможность свободного изменения форматов в рамках объема данного изобретения.
[0303] Другие примеры расположения точечного изображения будут описаны далее со ссылкой на фиг.34.
[0304] На фиг.34 (а) показан пример, в котором опорные точки расположены на виртуальных опорных точках. На фиг.34 (b) показан пример, в котором опорные точки расположены последовательно в три линии на поверхности носителя, при этом виртуальные опорные точки выполнены на опорных точках на соответствующих рядах.
[0305] Следует отметить, что в качестве стадии расположения опорных точек и виртуальных опорных точек в тех же точках, существует возможность использования или стадии выполнения виртуальных опорных точек на опорных точках, или стадии расположения опорных точек на виртуальных опорных точках.
[0306] На фиг.34 (с) показан пример, в котором вторые виртуальные опорные линии, виртуальные опорные точки и информационные точки расположены между рядами различных точек, последовательно расположенных в виде линий.
[0307] В примере, показанном на фиг.34 (с), прямые линии, соединяющие опорные точки, расположенные на различных первых виртуальных опорных линиях, устанавливаются как вторые виртуальные опорные линии, при этом виртуальные опорные точки обеспечиваются в средних точках вторых виртуальных опорных линий, а также располагаются информационные точки. Однако, расположение виртуальных опорных точек не ограничивается расположением, в котором вторые виртуальные опорные линии определяются между двумя первыми виртуальными опорными линиями. Кроме того, очевидно, что при расположении информационных точек вокруг опорных точек 4 и определении информации согласно уровню информации, которую необходимо ввести/вывести, существует возможность обеспечения виртуальных опорных точек на опорных точках и расположения информационных точек, как было описано выше.
[0308] На фиг.34 (d) показан пример, в котором вторые виртуальные опорные линии определяются между двумя или более первыми виртуальными опорными линиями, а также располагаются информационные точки.
[0309] При обеспечении таким образом виртуальных опорных точек между двумя или более первыми виртуальными опорными линиями, местоположения, в которых выполнены виртуальные опорные точки, не ограничиваются средними точками. Однако виртуальные опорные точки предпочтительно выполняются в средних точках с тем, чтобы простым образом и более точно установить местоположения виртуальных опорных точек по местоположениям соответствующих опорных точек, улучшить эффективность распознавания и повысить скорость вычисления.
[0310] Фиг.35 показывает пример состояния, в котором потоковые точечные изображения расположены вертикально.
[0311] Согласно фиг.35, ключевые точки и боковые точки расположены в дополнение к опорным точкам и информационным точкам. Ключевые точки представляют собой точки, расположенные на двух концах предопределенной информационной группы. Ключевые точки являются изображающими точками точечного изображения 1, относящимися к области, представленной информационной точечной группой. Боковые точки представляют собой точки, расположенные на удлиненных линиях в положительном и отрицательном направлениях смещения ключевых точек 2.
[0312] Согласно (b) на фиг.35, опорные точки и потоковые точечные изображения расположены на одинаковых интервалах. Значения координат XY определяются без какого-либо промежутка посредством формирования множества потоковых точечных изображений бок о бок с опорными точками, расположенными на предопределенных интервалах. Однако потоковое точечное изображение согласно данному изобретению не ограничивается этим. Как показано на фиг.35 (а), (b), интервалы могут произвольным образом устанавливаться между точечными изображениями. Кроме того, существует возможность произвольным образом устанавливать интервалы между опорными точками.
[0313] Это обеспечивает возможность формирования точечного изображения посредством повтора предопределенной информационной группы в виде произвольной формы, совпадающей с информационной областью, видимым образом сформированной на поверхности носителя, без ограничения формой прямоугольной области (используется в качестве индекса) при формировании точечного изображения, координаты XY которого определяются, в виде двухмерного кода.
Промышленная применимость
[0314] Согласно данному изобретению, существует возможность определения и использования информации на изогнутых поверхностях сферических объектов, манекенов и подобного, а также различных видах изделий, включающей линии на САПР чертежах, карты, буквы, символы и графику, а также контуры фотографий, картинки и подобное.
Список ссылочных обозначений
[0315]
1…точечное изображение
2…ключевая точка
3…информационная точка
4…опорная точка
5…виртуальная опорная точка
6…первая виртуальная опорная линия
7…вторая виртуальная опорная линия
8…третья виртуальная опорная линия
9…четвертая виртуальная опорная линия
10…реальная линия
12…боковая точка

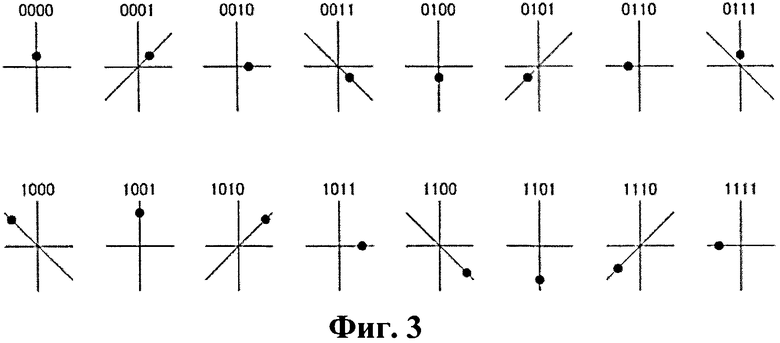
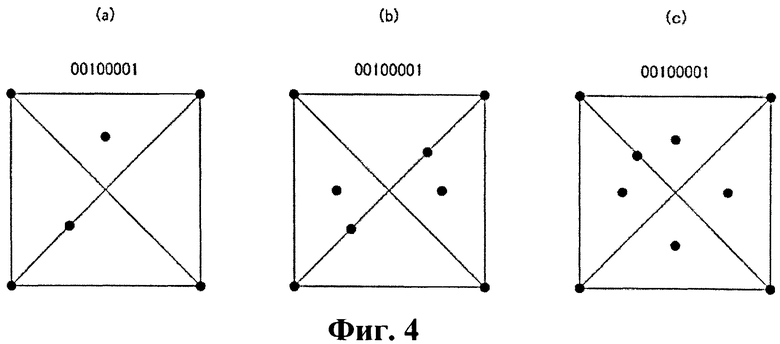
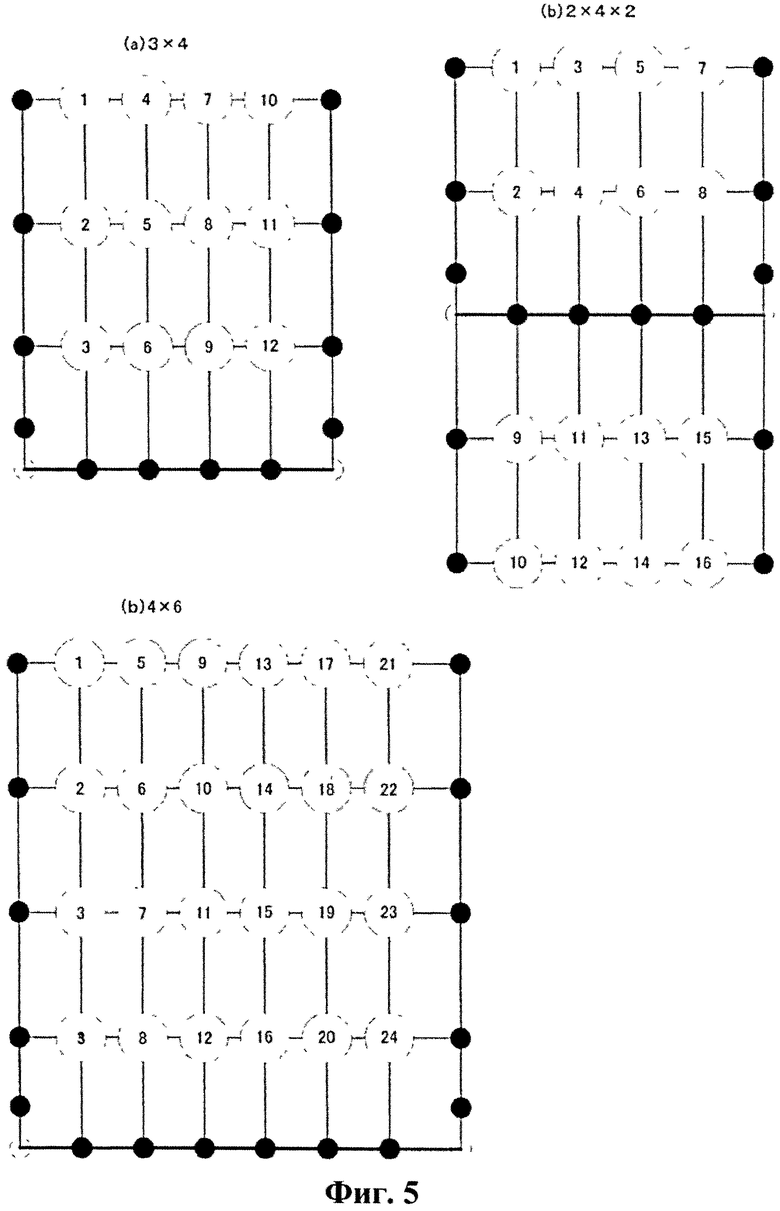
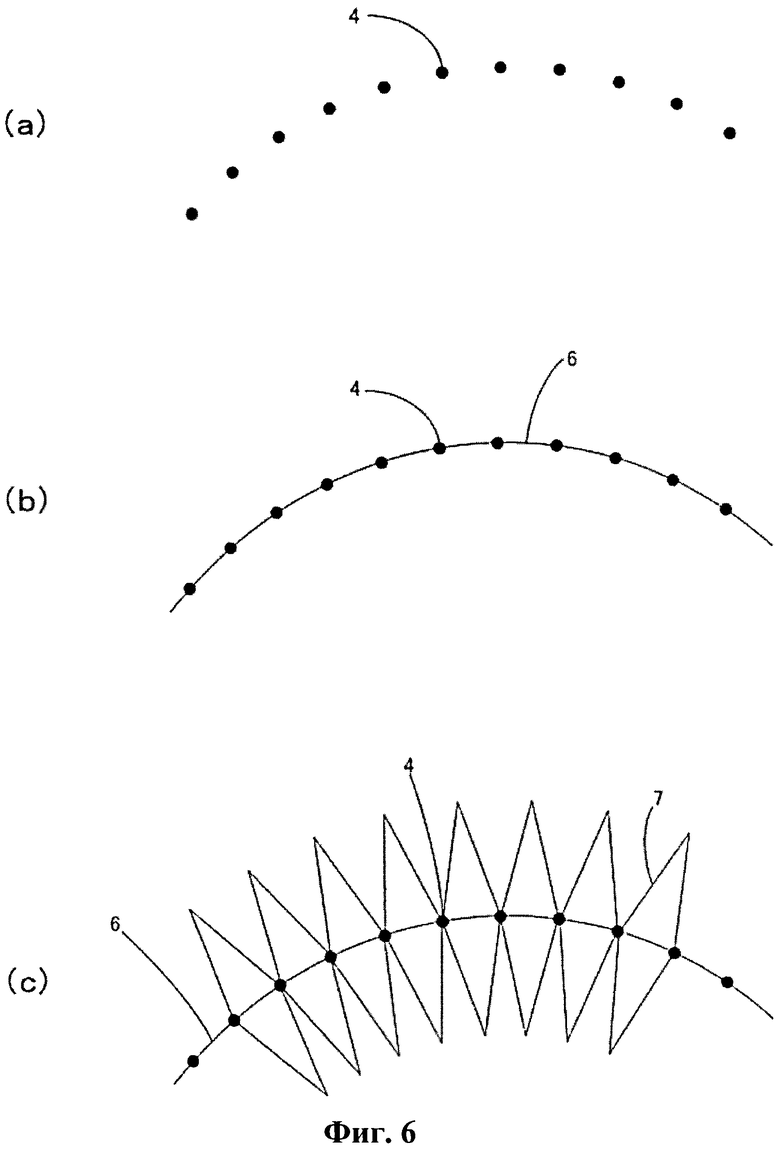
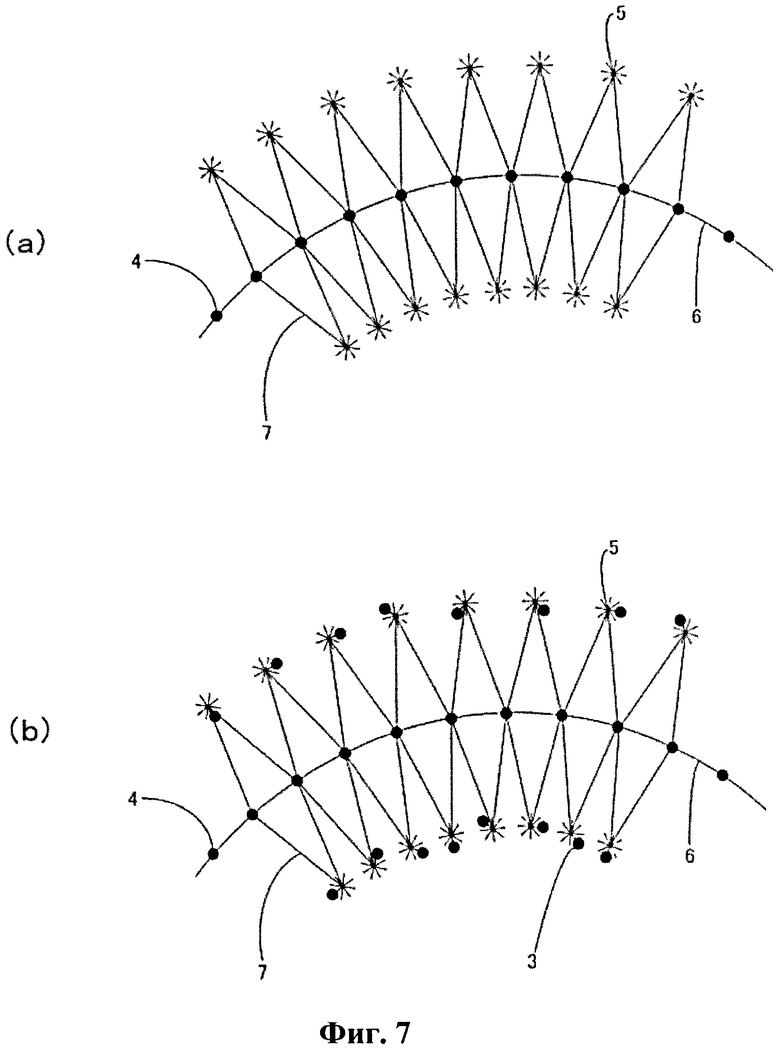
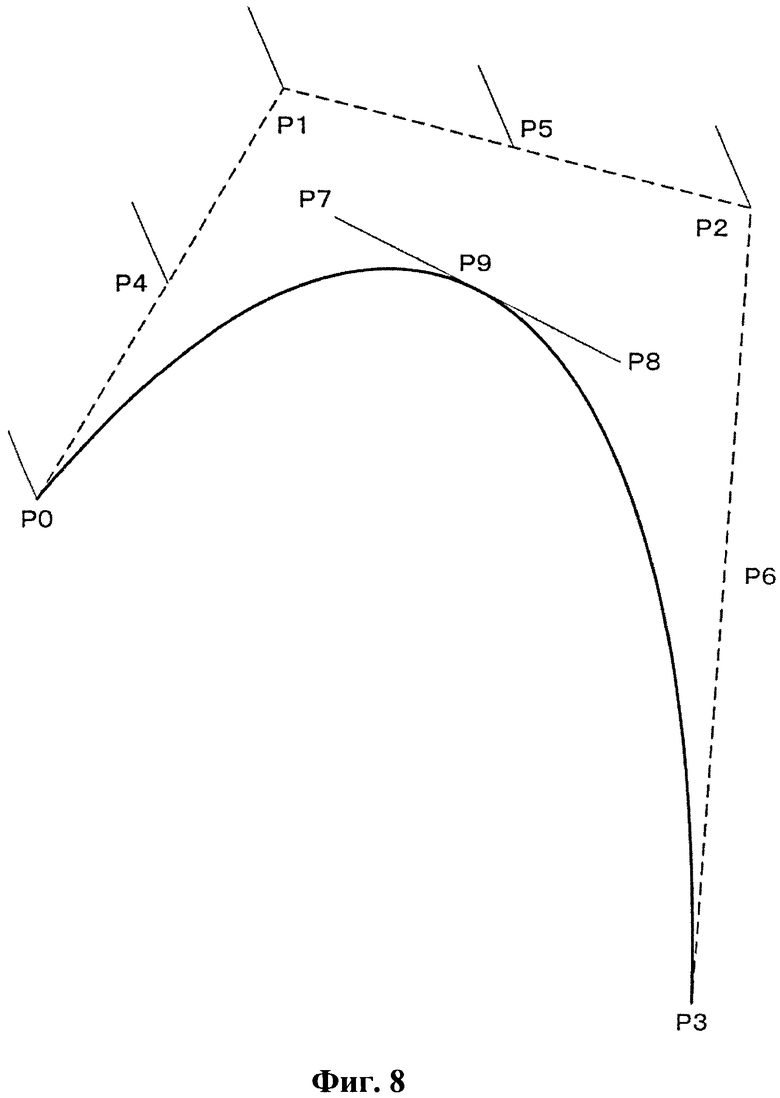
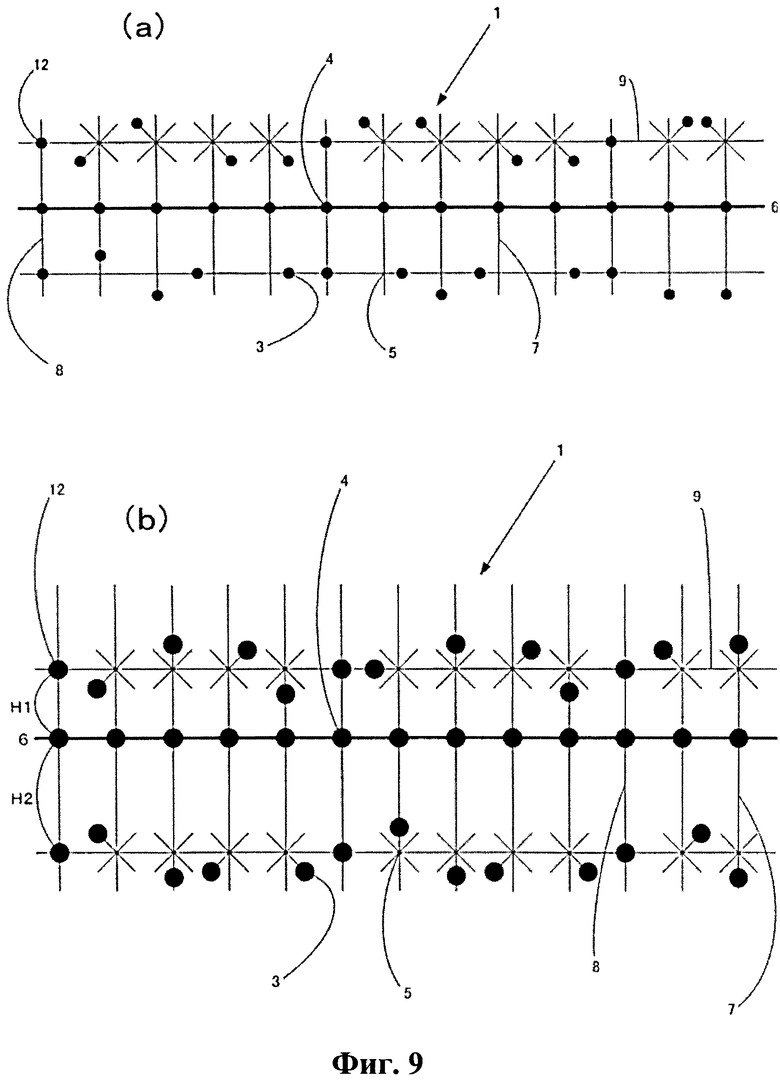
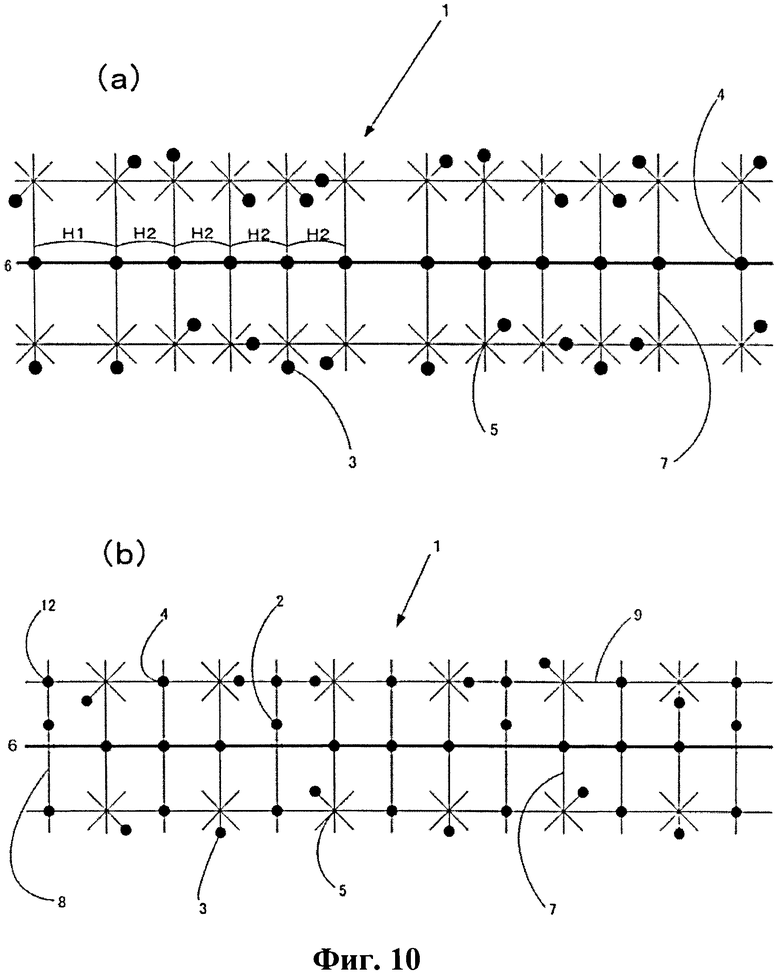
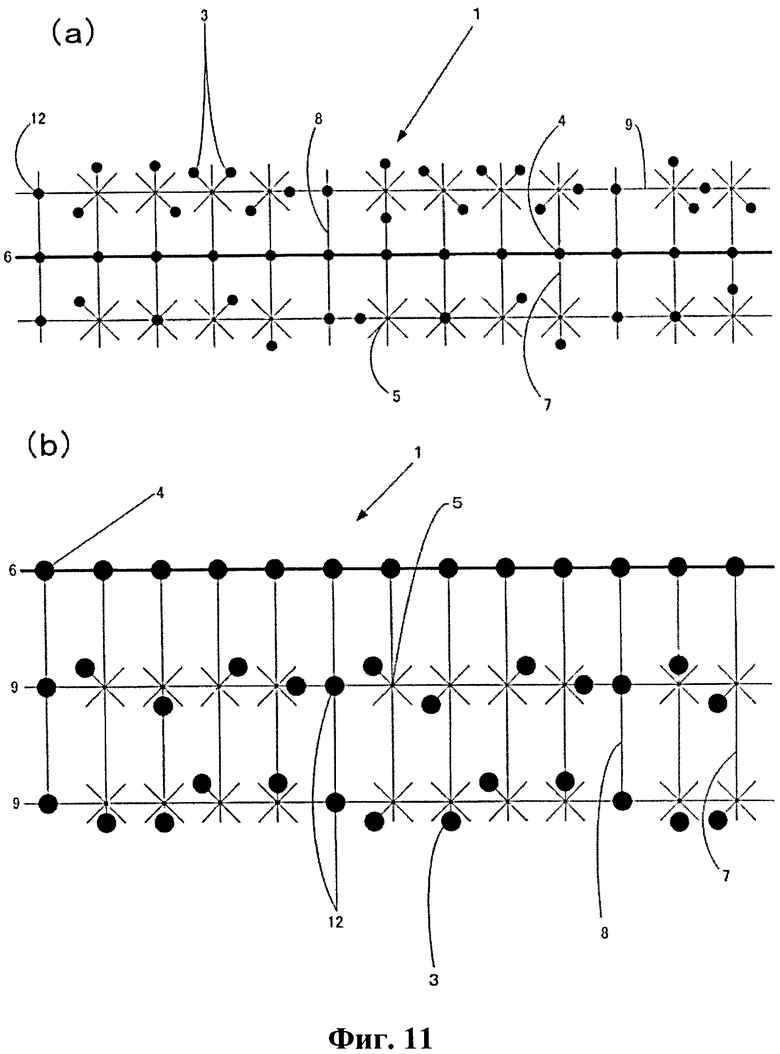
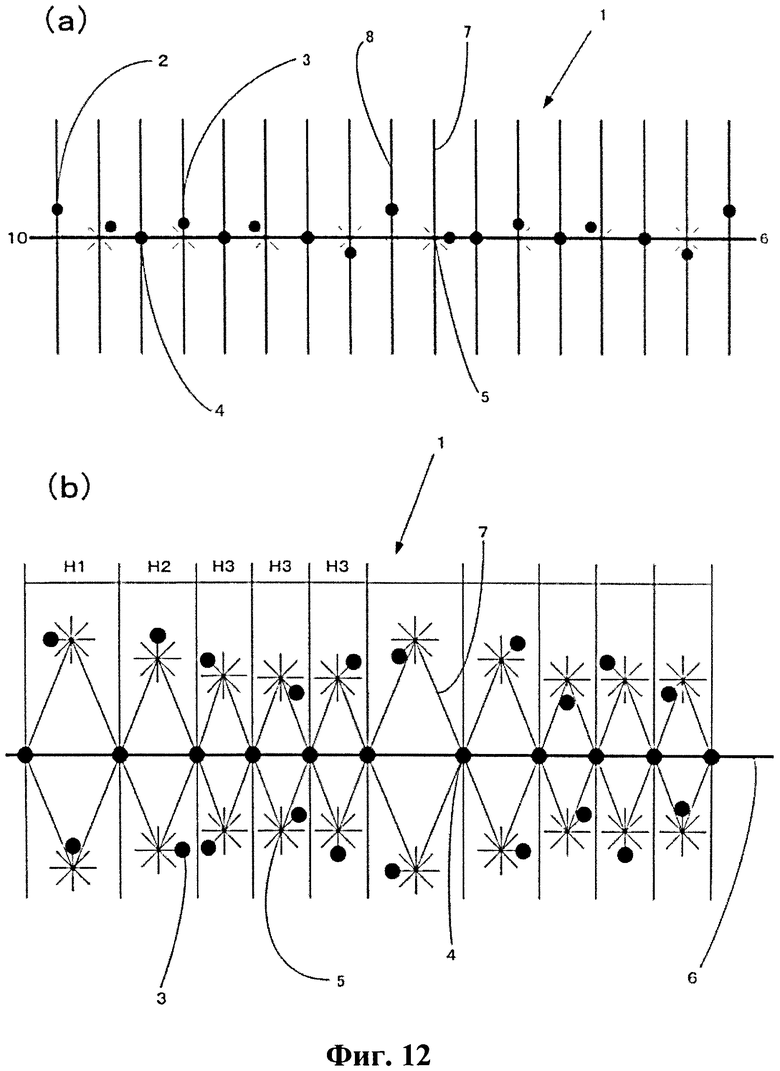
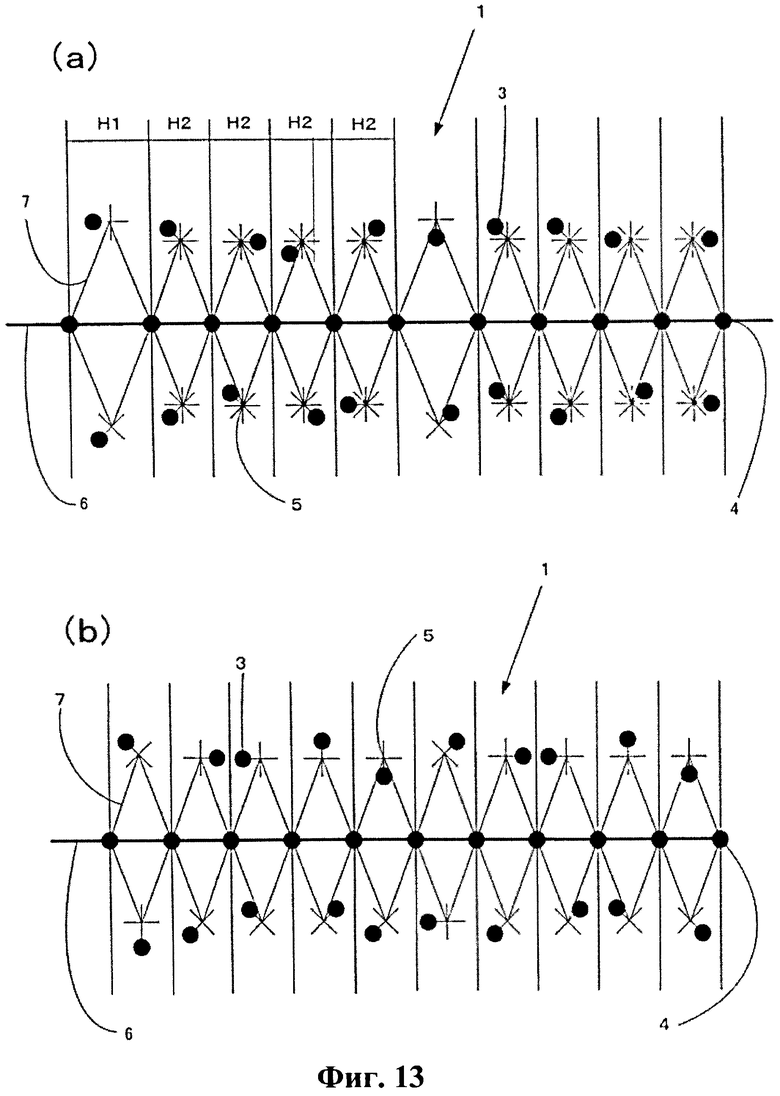
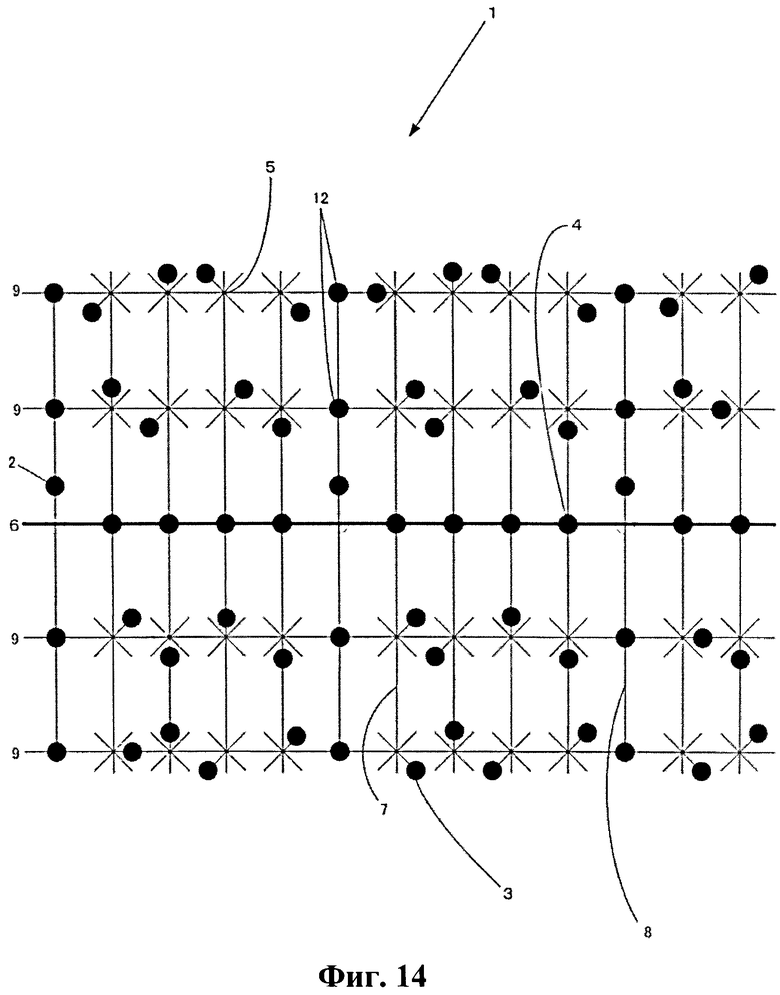
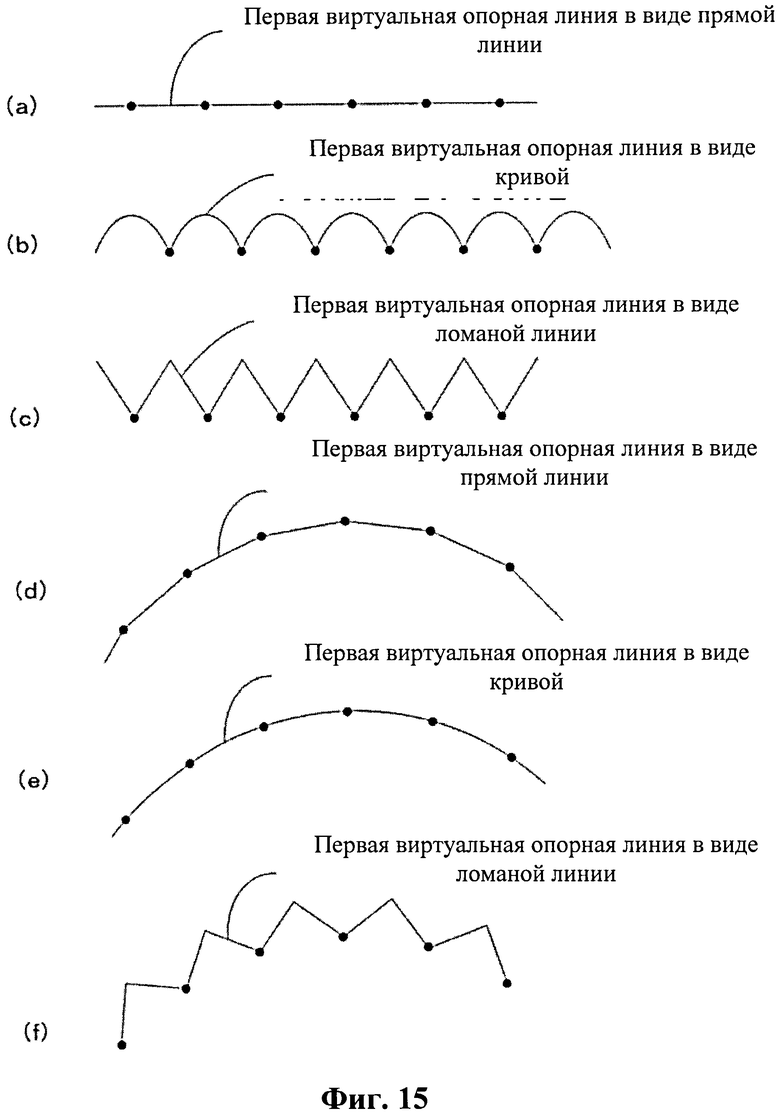
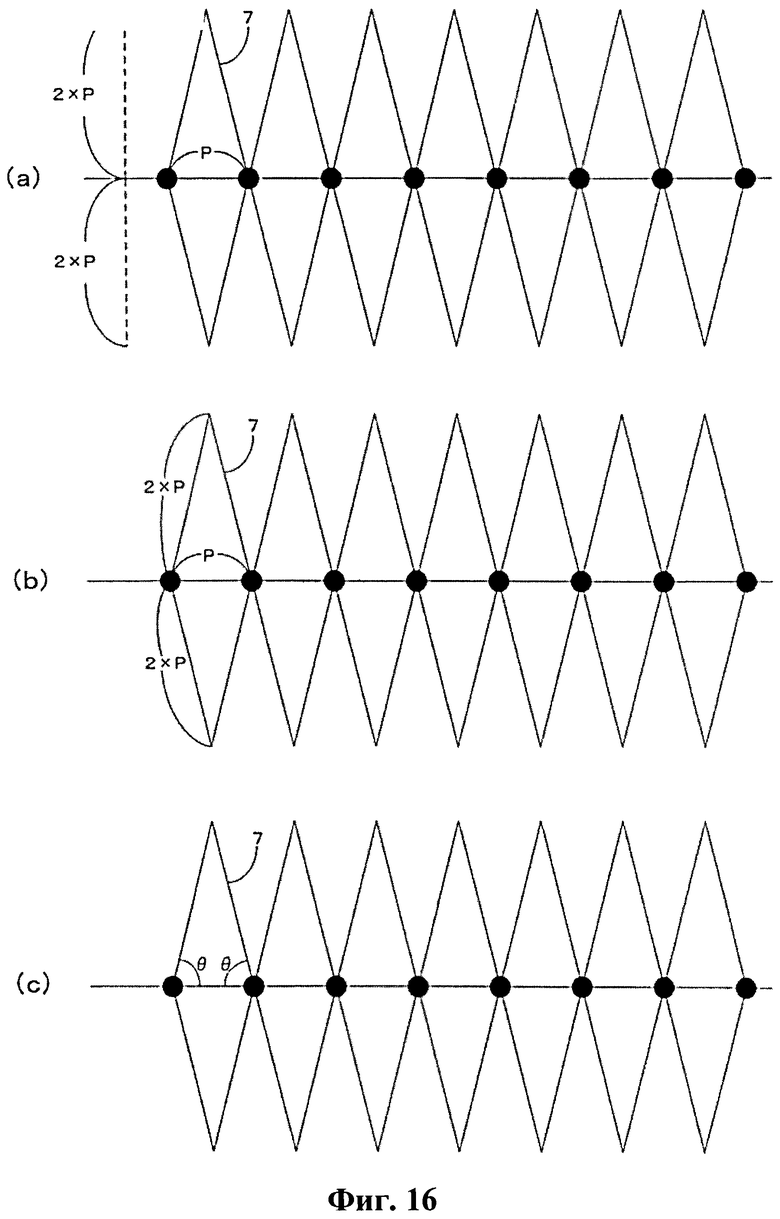
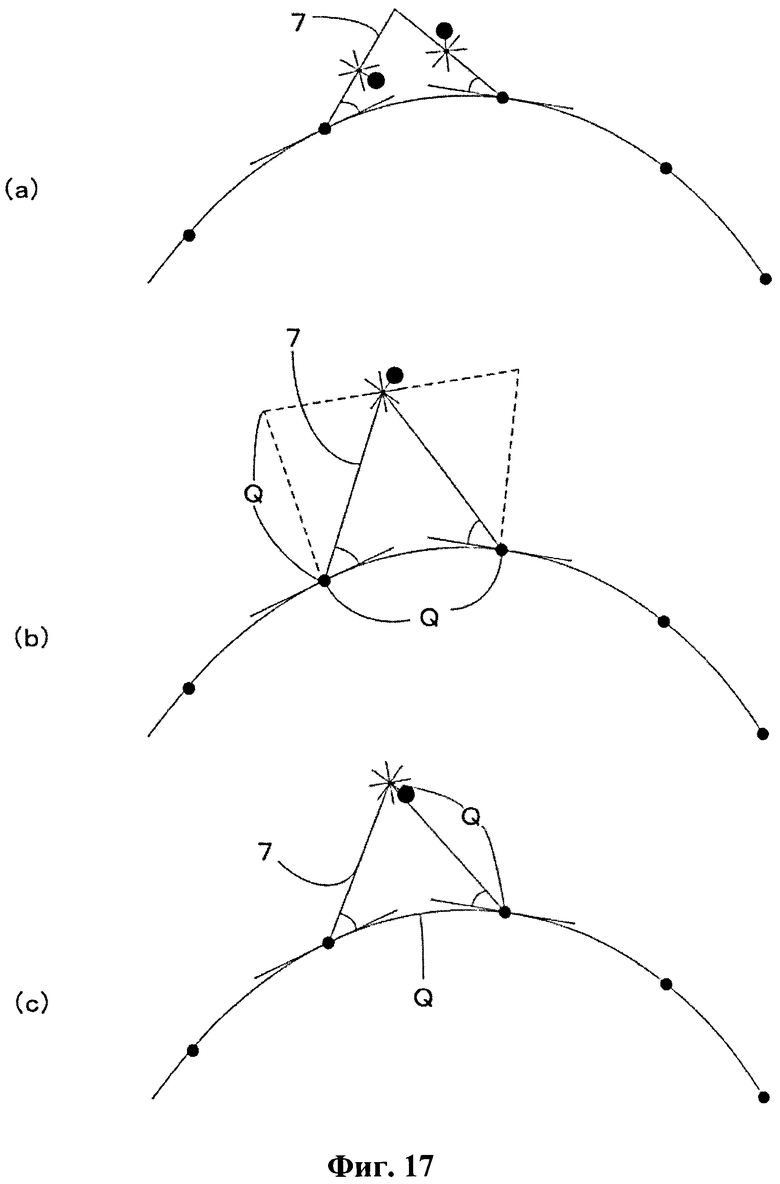
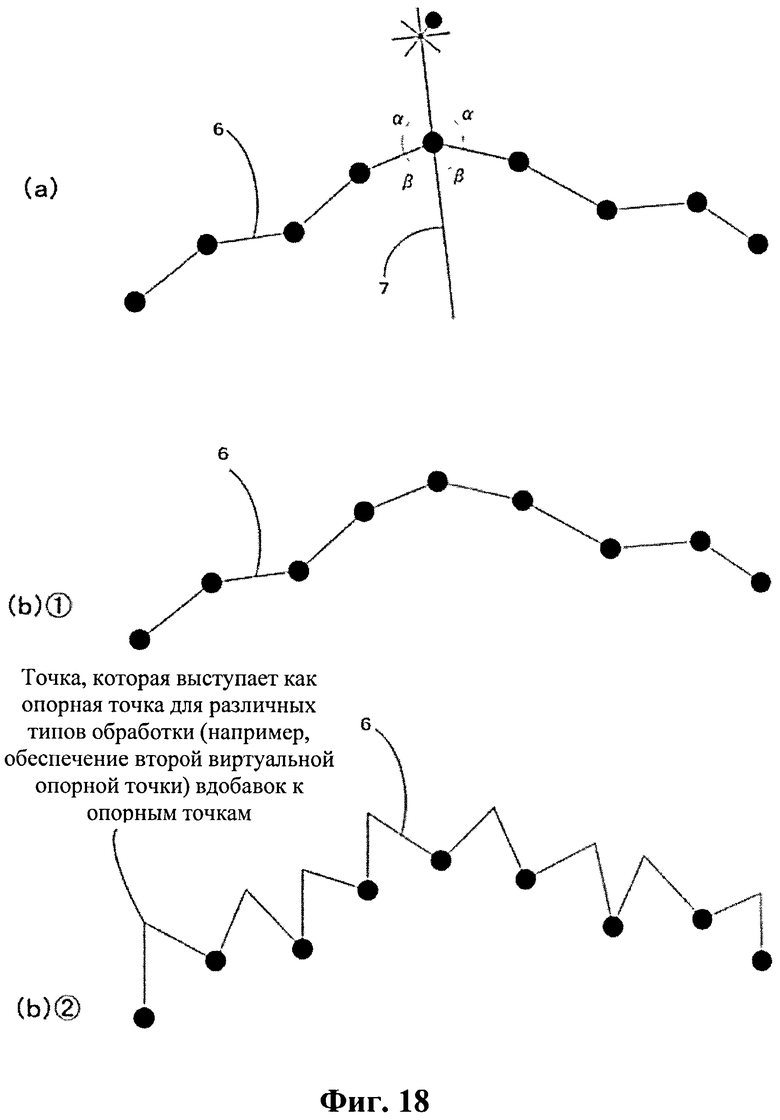
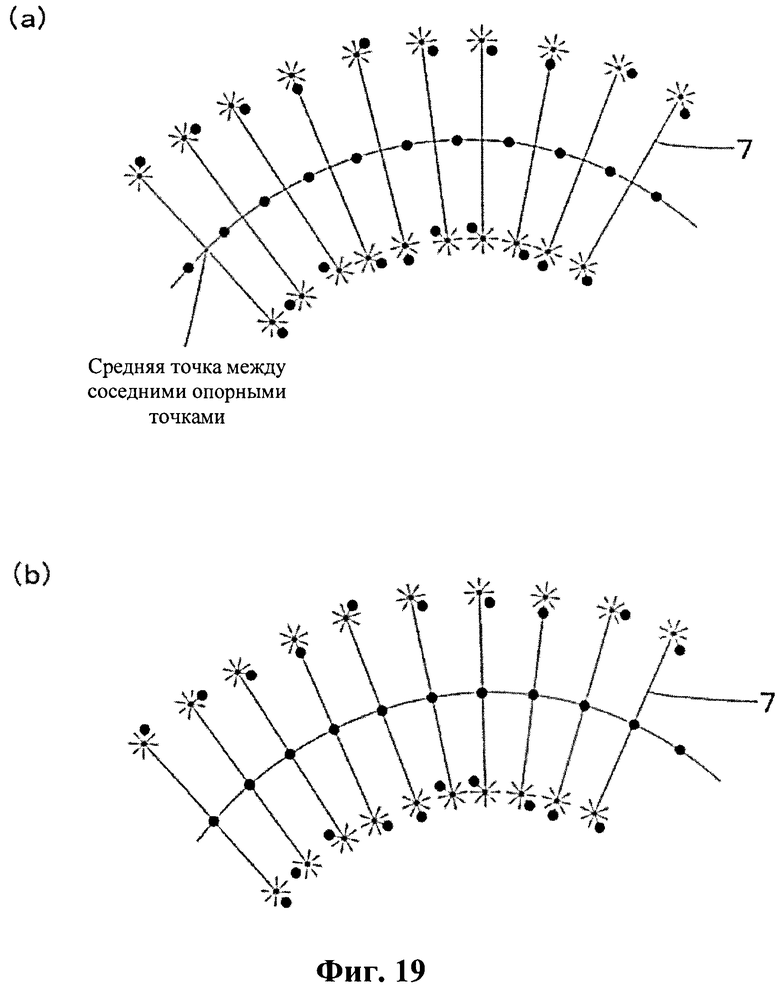
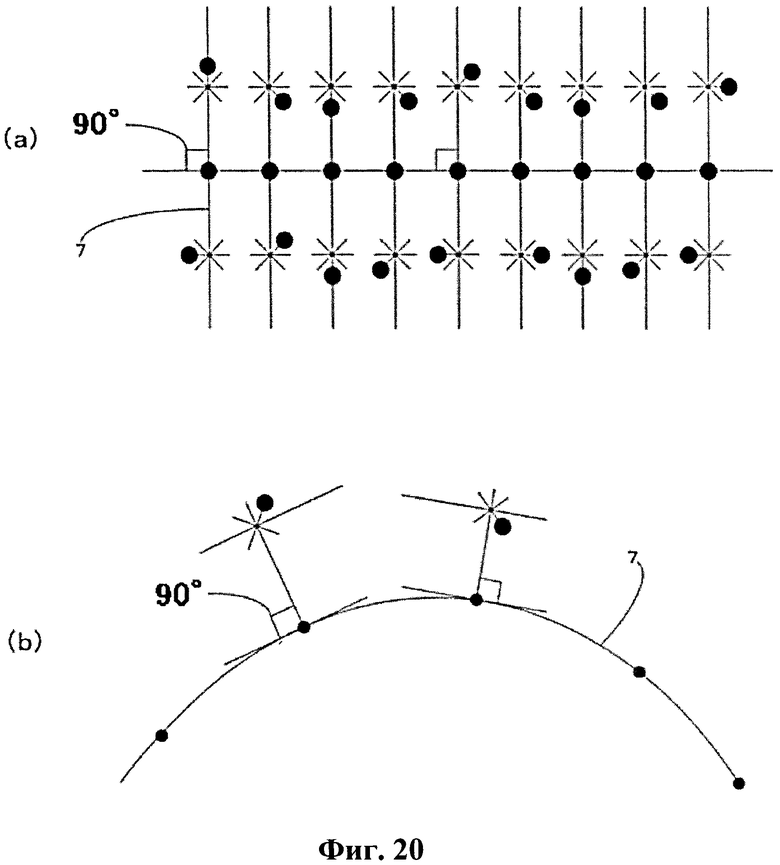
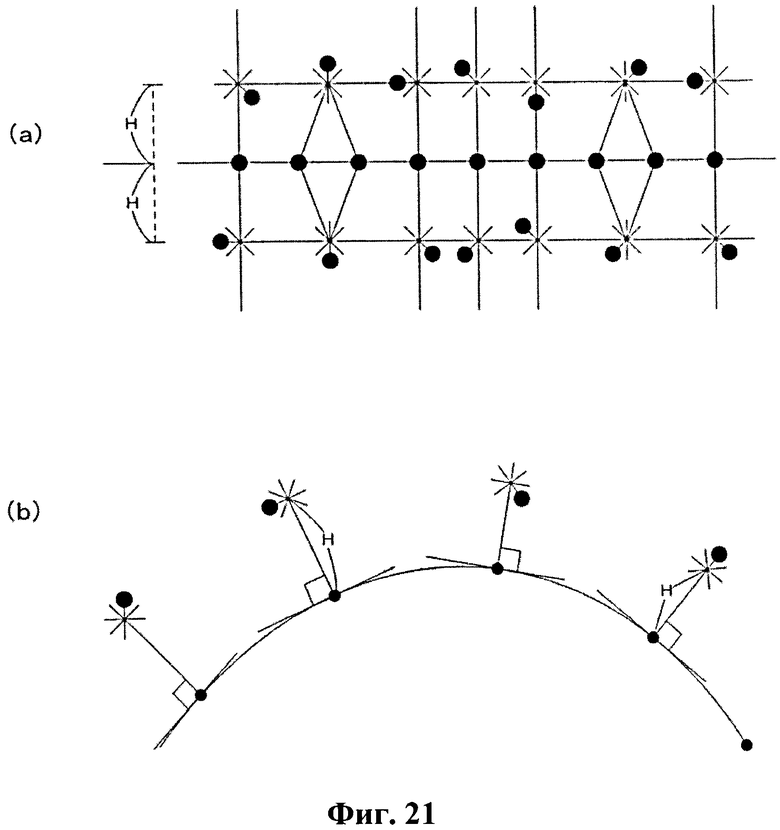
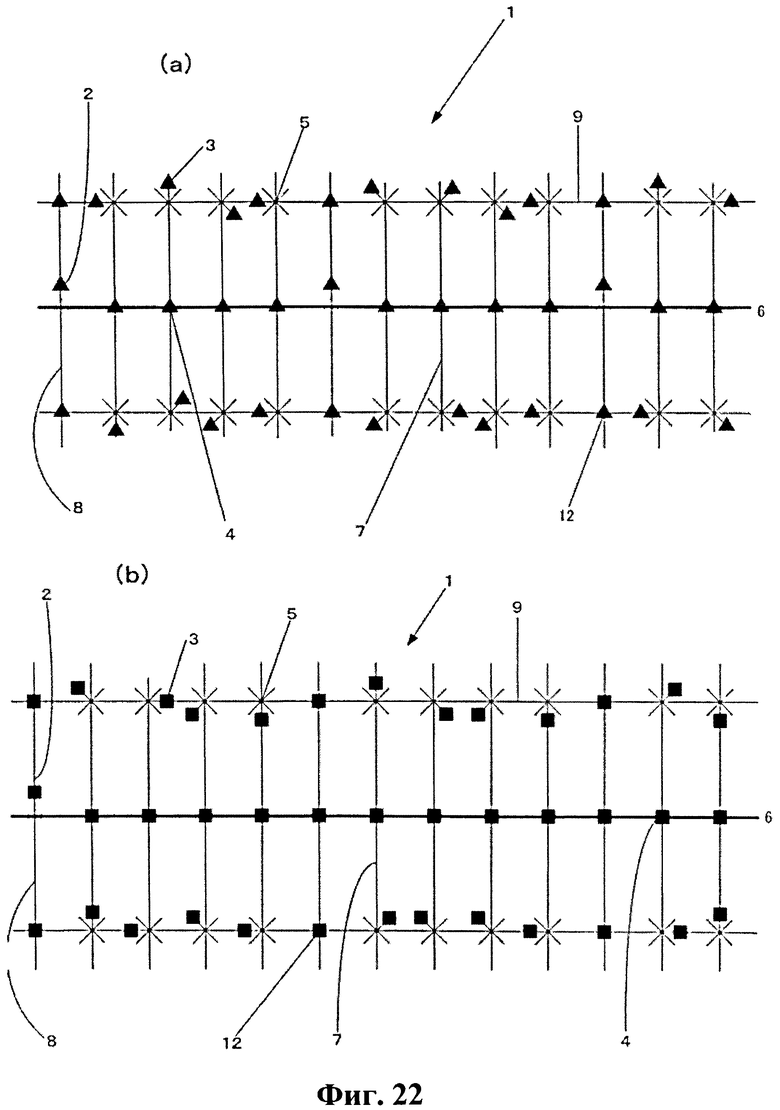
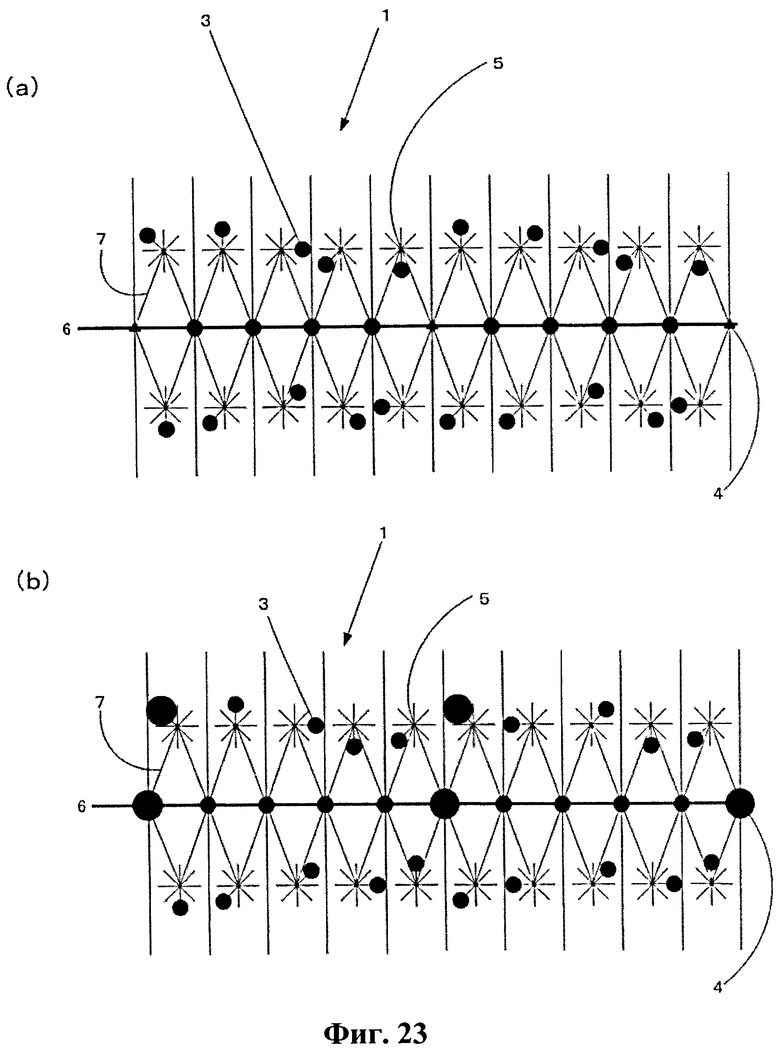
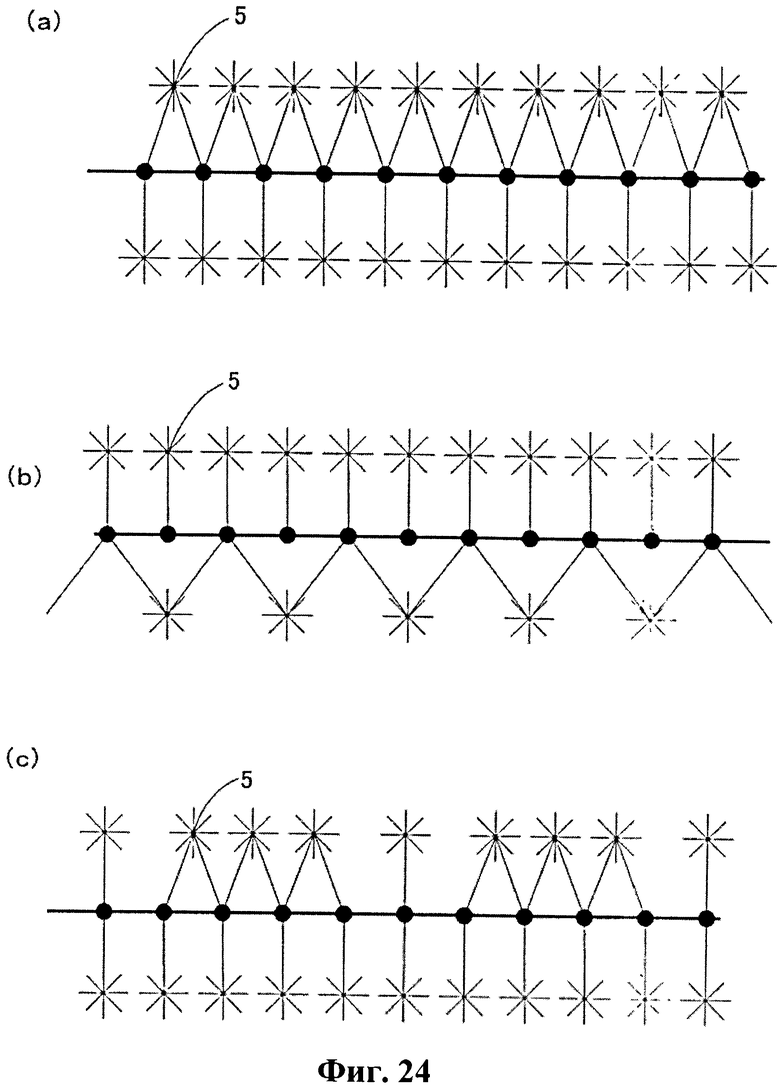
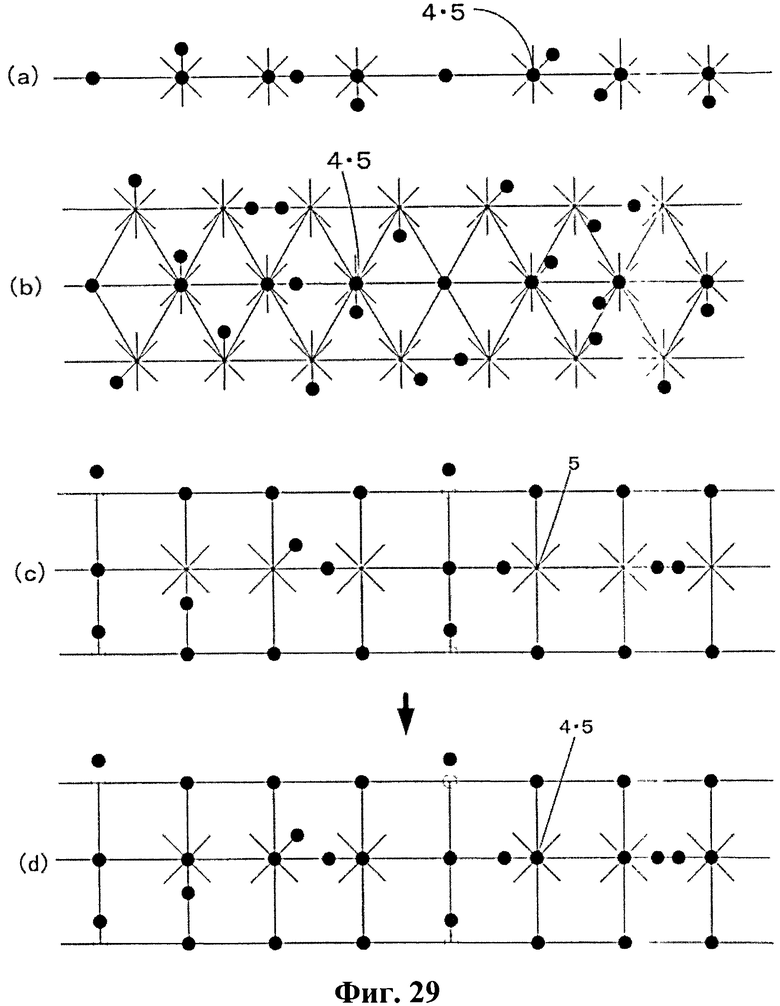
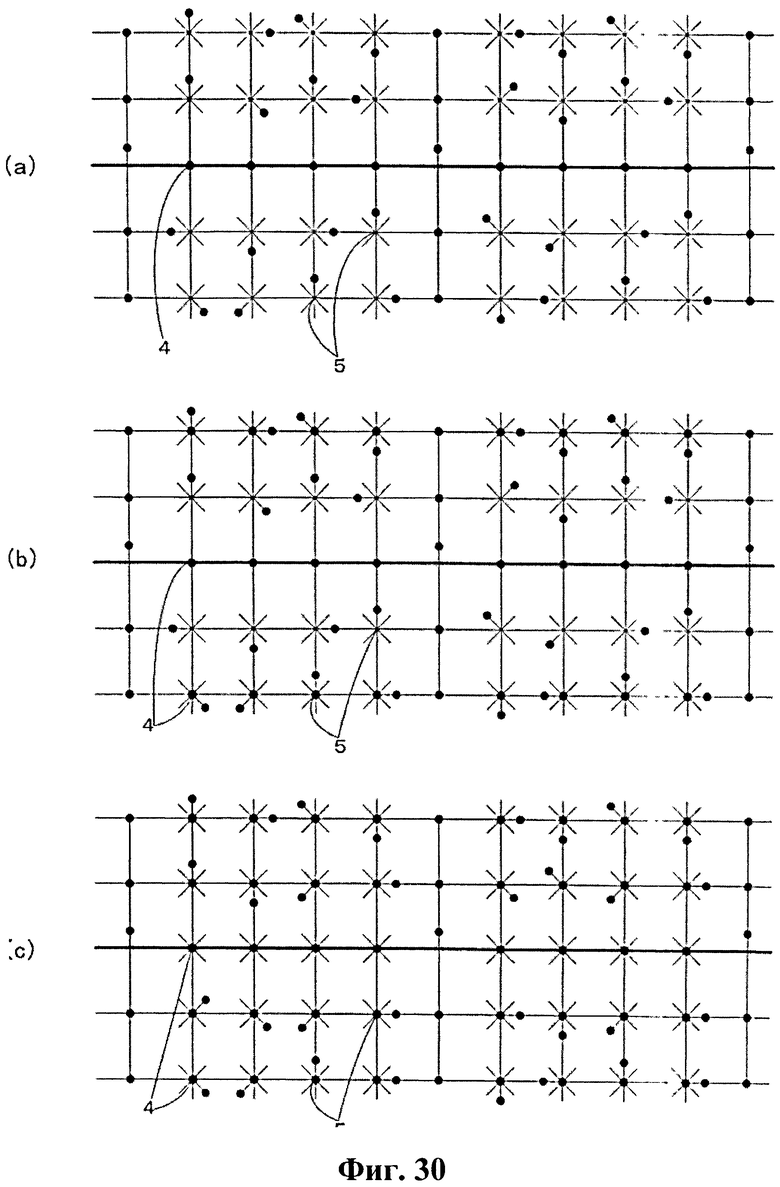
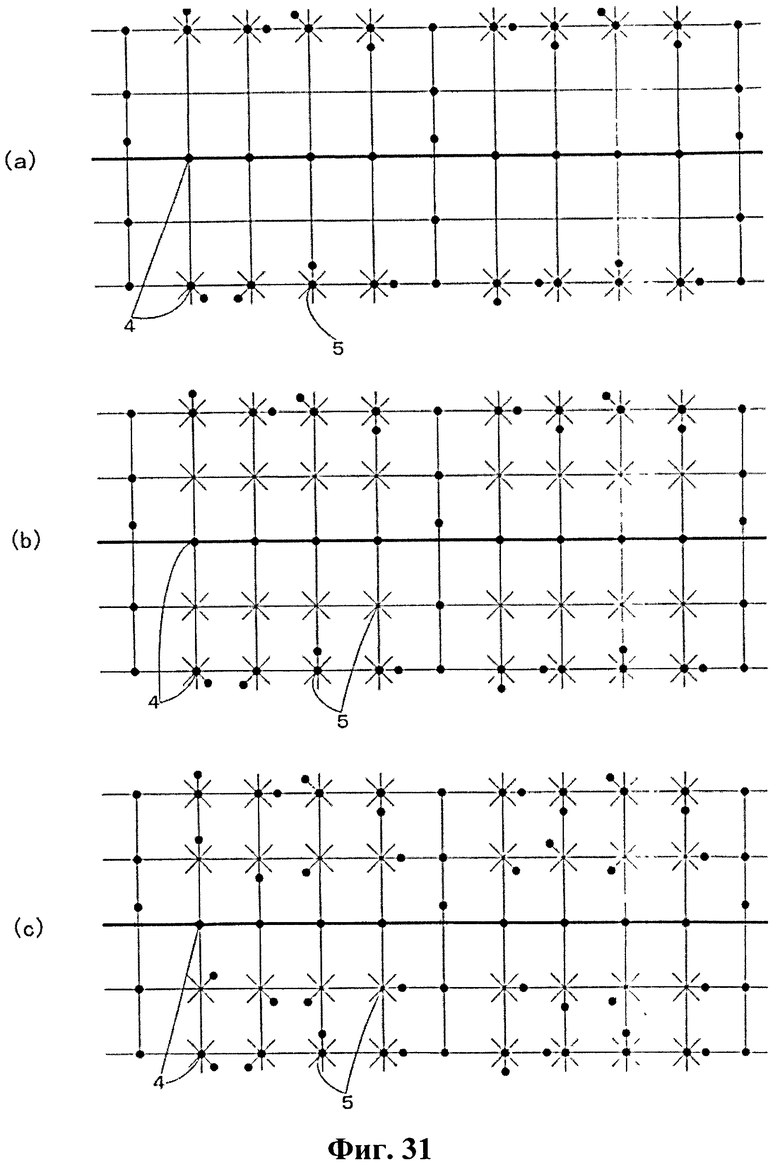
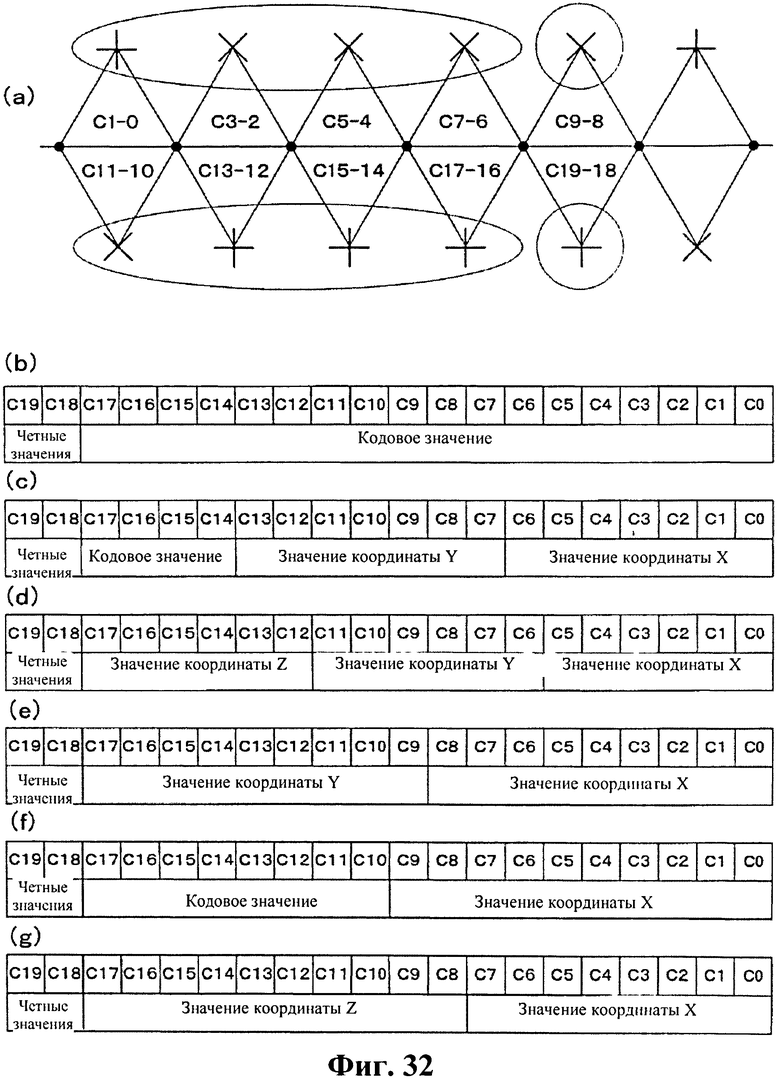
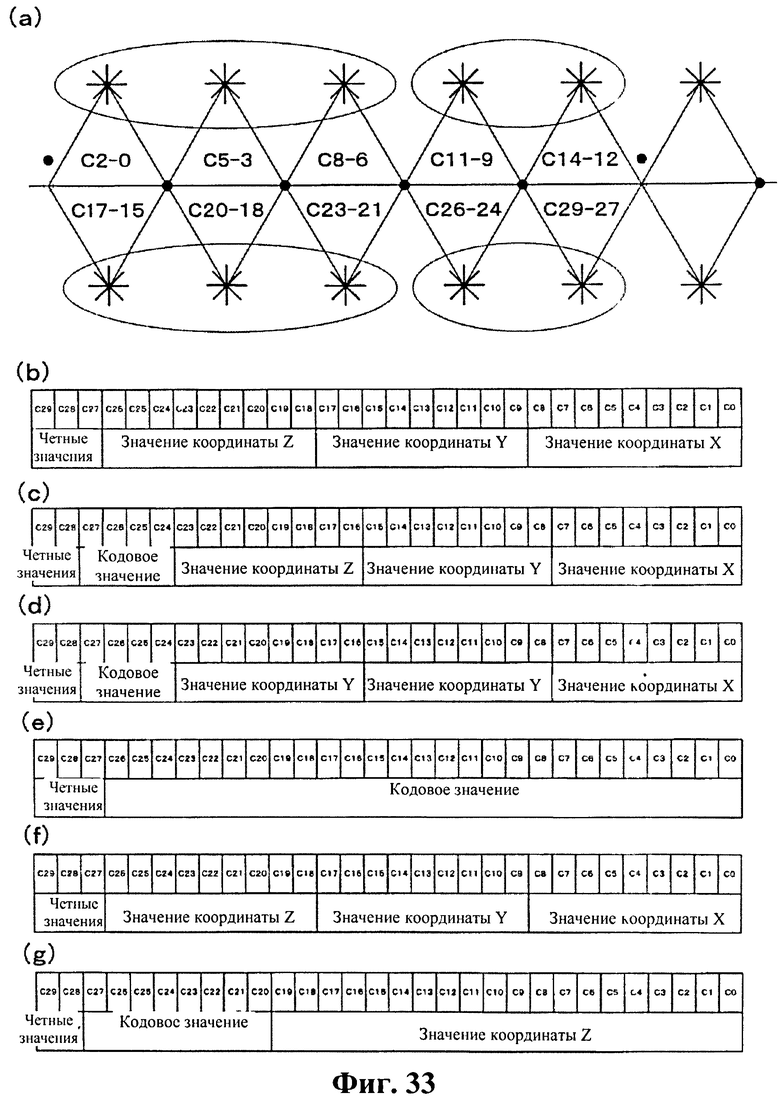
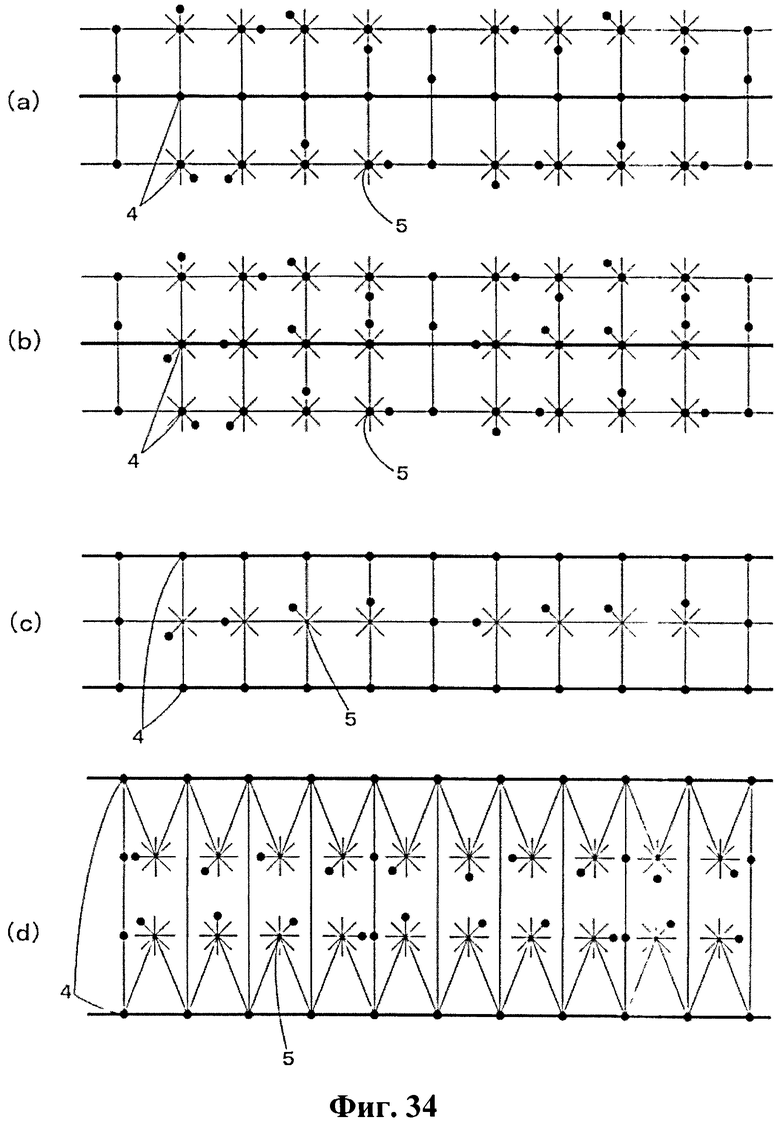
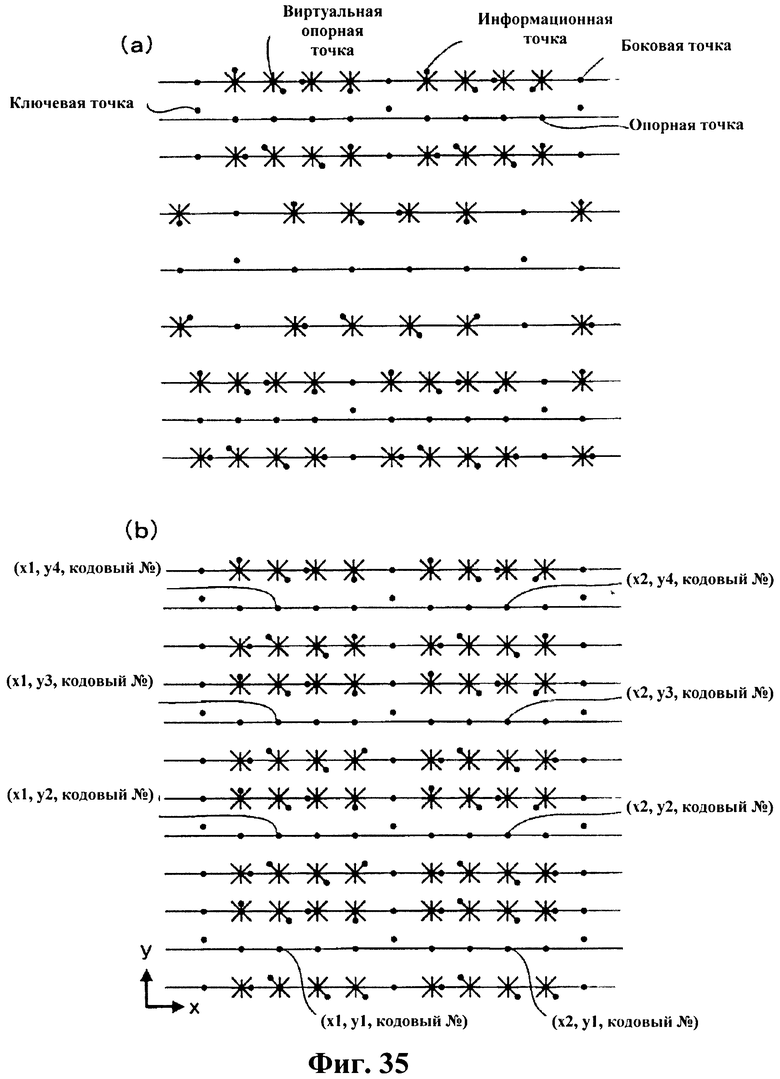
Изобретение относится к средствам формирования потокового точечного изображения. Технический результат заключается в повышении качества указанного изображения, формируемого на поверхностях изогнутых объектов. Способ включает этапы: расположения множества опорных точек линейно согласно предопределенному правилу, расположения информационной точки в конечной точке вектора, выраженного с одной из множества виртуальных опорных точек в качестве начальной точки, информация которой определена расстоянием и направлением от виртуальных опорных точек. В способе виртуальные опорные точки располагают на второй виртуальной опорной линии. 12 н. и 46 з.п. ф-лы, 35 ил.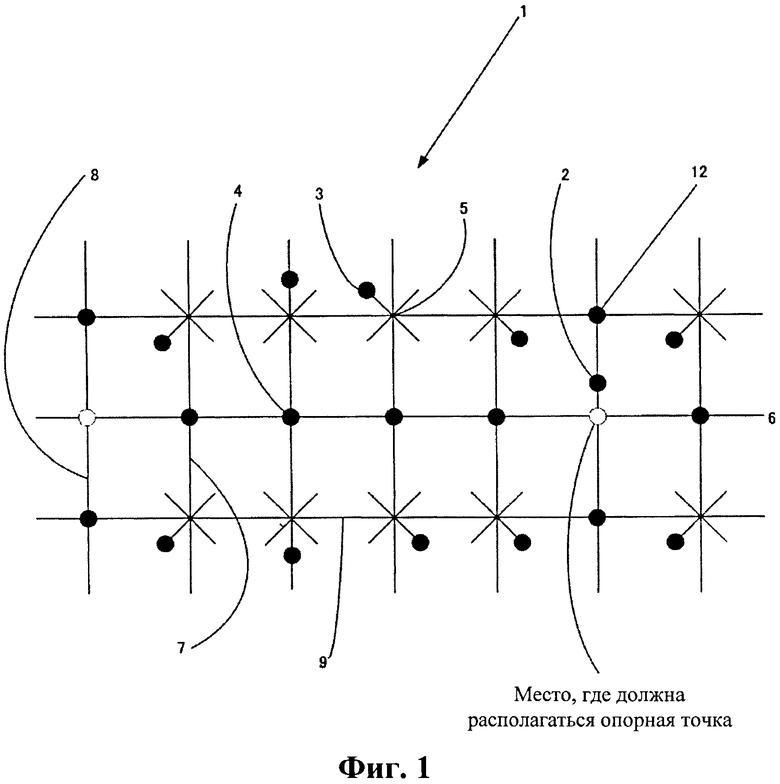
1. Способ формирования потокового точечного изображения на поверхности носителя, определяющего информацию согласно предопределенному правилу для точек, включающий стадии:
расположения множества опорных точек линейно согласно предопределенному правилу; и
расположения информационной точки в конечной точке вектора, выраженного с одной из множества виртуальных опорных точек в качестве начальной точки, и информация которой определена по меньшей мере одним из расстояния и направления от виртуальных опорных точек,
где виртуальные опорные точки располагают в предопределенных местах на второй виртуальной опорной линии, вторая виртуальная опорная линия виртуально определена в предопределенном месте относительно опорных точек и/или первой виртуальной опорной линии и сформирована прямой линией и/или кривой, и первая виртуальная опорная линия виртуально соединяет множество опорных точек и сформирована прямой линией или ломаной линией и/или кривой.
2. Способ формирования потокового точечного изображения по п. 1, отличающийся тем, что опорные точки располагают на предопределенных интервалах.
3. Способ формирования потокового точечного изображения по п. 1, отличающийся тем, что виртуальные опорные точки, предусмотренные на второй виртуальной опорной линии, предусматривают на опорных точках в месте второй виртуальной опорной линии.
4. Способ формирования потокового точечного изображения по п. 1, отличающийся тем, что виртуальные опорные точки дополнительно обеспечивают на опорных точках.
5. Способ формирования потокового точечного изображения по п. 1, отличающийся тем, что опорные точки дополнительно обеспечивают на виртуальных опорных точках.
6. Способ формирования потокового точечного изображения по п. 1, отличающийся тем, что опорные точки дополнительно располагают на виртуальных опорных точках и виртуальную опорную точку дополнительно обеспечивают в предопределенном месте, в котором одна из опорных точек, расположенных на виртуальных опорных точках, соединена с одной из множества опорных точек, расположенных линейно согласно предопределенному правилу.
7. Способ формирования потокового точечного изображения по п. 1, отличающийся тем, что опорные точки располагают не менее чем в два ряда, по меньшей мере, на поверхности носителя,
не менее чем две первые виртуальные опорные линии выполняют в соответствии с опорными точками не менее чем в два ряда, и
вторая виртуальная опорная линия, определенная в предопределенном месте относительно опорных точек и/или первой виртуальной опорной линии, определена между не менее чем двумя первыми виртуальными опорными линиями.
8. Способ формирования потокового точечного изображения по п. 7, отличающийся тем, что вторая виртуальная опорная линия содержит прямую линию, соединяющую множество опорных точек, расположенных на не менее чем двух различных первых виртуальных опорных линиях.
9. Способ формирования потокового точечного изображения по п. 7, отличающийся тем, что множество виртуальных опорных точек, расположенных в предопределенных местоположениях на вторых виртуальных опорных линиях, предусматривают в средних точках вторых виртуальных опорных линий.
10. Способ формирования потокового точечного изображения по п. 1, отличающийся тем, что вторые виртуальные опорные линии, определенные в предопределенных местах относительно опорных точек и/или первой виртуальной опорной линии, содержат прямые линии, образующие противоположные стороны, формирующие треугольник с основанием в виде первой виртуальной опорной линии, соединяющей соседние опорные точки прямой линией, и
множество виртуальных опорных точек, расположенных в предопределенных местах на вторых виртуальных опорных линиях, располагают в вершинах треугольника или на противоположных сторонах треугольника.
11. Способ формирования потокового точечного изображения по п. 10, отличающийся тем, что треугольник образован посредством предопределенных углов при основании в соседних опорных точках, длин противоположных сторон, соответствующих предопределенным увеличениям относительно основания, или высоты от основания к вершине, которая соответствует предопределенному коэффициенту увеличения относительно основания.
12. Способ формирования потокового точечного изображения по п. 10, отличающийся тем, что треугольник включает равнобедренный треугольник или равносторонний треугольник.
13. Способ формирования потокового точечного изображения по п. 1, отличающийся тем, что вторая виртуальная опорная линия, определенная в предопределенном месте относительно опорных точек и/или первой виртуальной опорной линии, содержит прямую линию, которая делит на две равные половины внутренний угол в вершине первой виртуальной опорной линии, образованной посредством ломаной линии, и
множество виртуальных опорных точек, расположенных в предопределенных местах на вторых виртуальных опорных линиях, располагают на предопределенных расстояниях от множества опорных точек.
14. Способ формирования потокового точечного изображения по п. 1, отличающийся тем, что опорные точки располагают только в вершинах первой виртуальной линии, сформированной в виде ломаной линии.
15. Способ формирования потокового точечного изображения по п. 1, отличающийся тем, что вторая виртуальная опорная линия, определенная в предопределенном месте относительно опорных точек и/или первой виртуальной опорной линии, содержит прямую линию, которая образует произвольный угол относительно касательной к первой виртуальной опорной линии, образованной кривой, и множество виртуальных опорных точек, расположенных в предопределенных местах на вторых виртуальных опорных линиях, располагают в предопределенных местах, определенных по соседним опорным точкам.
16. Способ формирования потокового точечного изображения по п. 15, отличающийся тем, что предопределенное местоположение, определенное по соседним опорным точкам, определено точкой пересечения вторых виртуальных опорных линий, которые образуют предопределенные углы относительно соседних опорных точек, расстоянием от опорной точки, соответствующей предопределенному коэффициенту увеличения относительно длины первой виртуальной опорной линии, сформированной кривой, соединяющей соседние опорные точки, или высотой от первой виртуальной опорной линии, сформированной кривой, соединяющей соседние опорные точки, соответствующей предопределенному коэффициенту увеличения относительно длины первой виртуальной опорной линии.
17. Способ формирования потокового точечного изображения по п. 1, отличающийся тем, что вторая виртуальная опорная линия, определенная в предопределенном месте относительно опорных точек и/или первой виртуальной опорной линии, содержит прямую линию, проходящую через опорные точки или среднюю точку соседних опорных точек.
18. Способ формирования потокового точечного изображения по п. 1, отличающийся тем, что вторая виртуальная опорная линия, определенная в предопределенном месте относительно опорных точек и/или первой виртуальной опорной линии, содержит: прямую линию, перпендикулярную первой виртуальной опорной линии, сформированной прямой линией; или прямую линию, перпендикулярную касательной к первой виртуальной опорной линии, сформированной кривой, и
множество виртуальных опорных точек, расположенных в предопределенных местах на второй виртуальной опорной линии, располагают в предопределенных местах, определенных по соседним опорным точкам.
19. Способ формирования потокового точечного изображения по п. 1, отличающийся тем, что множество виртуальных опорных точек, предусмотренных в предопределенных местах на второй виртуальной опорной линии, предусматривают на предопределенных расстояниях от первой виртуальной опорной линии, образованной прямой линией, или от касательной к первой виртуальной опорной линии, сформированной кривой.
20. Способ формирования потокового точечного изображения по п. 1, отличающийся тем, что множество опорных точек располагают на различных интервалах, и направление точечного изображения и предопределенной информационной группы точечного изображения определены интервалами расположения.
21. Способ формирования потокового точечного изображения по п. 20, отличающийся тем, что множество опорных точек располагают для каждой предопределенной информационной группы точечного изображения таким образом, что интервал между по меньшей мере одной парой соседних опорных точек отличается от одинаковых интервалов между другими парами соседних опорных точек, и предопределенная информационная группа точечного изображения определена интервалами расположения.
22. Способ формирования потокового точечного изображения по п. 20, отличающийся тем, что множество опорных точек располагают для каждой предопределенной информационной группы точечного изображения таким образом, что интервалы между по меньшей мере двумя парами соседних опорных точек отличаются друг от друга, а также от одинаковых интервалов между другими парами соседних опорных точек, и направление точечного изображения и предопределенной информационной группы точечного изображения определены интервалами расположения.
23. Способ формирования потокового точечного изображения по п. 1, отличающийся тем, что информационные точки, информация каждой из которых определяется расстоянием и направлением от виртуальной опорной точки в конечной точке, выраженной вектором с виртуальной опорной точкой, являющейся начальной точкой, размещают на двух противоположных сторонах первой виртуальной опорной линии в различных направлениях смещения, и направление точечного изображения и предопределенной информационной группы точечного изображения определены отличием между направлениями смещения.
24. Способ формирования потокового точечного изображения по п. 1, отличающийся тем, что множество виртуальных опорных точек, предусмотренных в предопределенных местах на второй виртуальной опорной линии, расположены таким образом, что различные количества виртуальных опорных точек располагают на двух сторонах первой виртуальной опорной линии, и направление точечного изображения и предопределенной информационной группы точечного изображения определены отличием в количествах.
25. Способ формирования потокового точечного изображения по п. 1, отличающийся тем, что информационные точки, информация каждой из которых определяется расстоянием и направлением от виртуальной опорной точки в конечной точке, выраженной вектором с виртуальной опорной точкой, являющейся начальной точкой, размещаются таким образом, что различные количества информационных точек располагают на двух сторонах первой виртуальной опорной линии, при этом направление точечного изображения и предопределенной информационной группы точечного изображения определены отличием в количествах.
26. Способ формирования потокового точечного изображения по п. 1, отличающийся тем, что информация определена в зависимости от того, размещается ли для каждой из виртуальных опорных точек, размещенных на виртуальной опорной точке, информационная точка, которая размещена в конечной точке, выраженной вектором с виртуальной опорной точкой, которая является начальной точкой, и чья информация определена расстоянием и направлением от виртуальной опорной точки, или не размещается ни на одной из них.
27. Способ формирования потокового точечного изображения по п. 1, отличающийся тем, что направление точечного изображения и предопределенной информационной группы определены посредством смещения и размещения по меньшей мере одной из множества опорных точек в качестве ключевой точки в предопределенное место.
28. Способ формирования потокового точечного изображения по п. 27, отличающийся тем, что направление точечного изображения и предопределенной информационной группы определено посредством размещения ключевой точки в предопределенном месте в направлении, параллельном или перпендикулярном направлению второй виртуальной опорной линии.
29. Способ формирования потокового точечного изображения по п. 27, отличающийся тем, что виртуально предусматривают третью виртуальную опорную линию, проходящую через по меньшей мере одну из множества опорных точек и перпендикулярную прямой линии, формирующей первую виртуальную опорную линию, или касательной к кривой, формирующей первую виртуальную опорную линию, или делящую внутренний угол на одинаковые половины в вершине ломаной линии, формируя первую виртуальную опорную линию, и направление точечного изображения и предопределенной информационной группы определено посредством размещения ключевой точки в предопределенном месте на третьей виртуальной опорной линии.
30. Способ формирования потокового точечного изображения по п. 27, отличающийся тем, что вторую виртуальную опорную линию, определенную в предопределенном месте относительно опорных точек и/или первой виртуальной опорной линии, определена лишь исходя из опорных точек, отличающихся от опорной точки, смещенной как ключевая точка.
31. Способ формирования потокового точечного изображения по п. 1, отличающийся тем, что виртуально предусматривают третью виртуальную опорную линию, проходящую через по меньшей мере одну из множества опорных точек и перпендикулярную прямой линии, формирующей первую виртуальную опорную линию, или касательной к кривой, формирующей первую виртуальную опорную линию, или делящую внутренний угол на одинаковые половины в вершине ломаной линии, формируя первую виртуальную опорную линию, и по меньшей мере одну боковую точку, которая определяет направление точечного изображения и предопределенной информационной группы, размещают в предопределенном месте на третьей виртуальной опорной линии.
32. Способ формирования потокового точечного изображения по п. 31, отличающийся тем, что множество виртуальных опорных точек, предусмотренных в предопределенных местах на второй виртуальной опорной линии, предусматривают на четвертой виртуальной опорной линии, параллельной первой виртуальной опорной линии и виртуально проходящей через боковую точку.
33. Способ формирования потокового точечного изображения по п. 32, отличающийся тем, что множество опорных точек предусматривают на предопределенных интервалах на четвертой виртуальной опорной линии.
34. Способ формирования потокового точечного изображения по п. 31, отличающийся тем, что по меньшей мере не менее чем одну из боковых точек размещают на каждой из двух сторон первой виртуальной опорной линии таким образом, что боковые точки располагаются на различных расстояниях от первой виртуальной опорной линии, и направление точечного изображения определено посредством расстояний между боковыми точками и первой виртуальной опорной линией.
35. Способ формирования потокового точечного изображения по п. 1, отличающийся тем, что по меньшей мере одну из множества опорных точек смещают и размещают в качестве ключевой точки в предопределенное место,
виртуально предусматривают третью виртуальную опорную линию, проходящую через по меньшей мере одну из множества опорных точек и перпендикулярную прямой линии, формирующей первую виртуальную опорную линию, или касательной к кривой, формирующей первую виртуальную опорную линию, или делящую внутренний угол на одинаковые половины в вершине ломаной линии, формируя первую виртуальную опорную линию,
по меньшей мере одну боковую точку, которая определяет направление точечного изображения и предопределенной информационной группы, размещают в предопределенном месте на третьей виртуальной опорной линии и по меньшей мере не менее чем одну из боковых точек размещают на каждой из двух сторон первой виртуальной опорной линии таким образом, что боковые точки располагаются на одинаковых расстояниях от первой виртуальной опорной линии, и направление точечного изображения и предопределенной информационной группы точечного изображения определены посредством расстояния между боковой точкой и ключевой точкой.
36. Способ формирования потокового точечного изображения по п. 1, отличающийся тем, что опорную точку и/или информационную точку формируют при помощи многоугольной формы, сконфигурированной для обозначения направления, а направление точечного изображения определено формой.
37. Способ формирования потокового точечного изображения по п. 1, отличающийся тем, что одна опорную точку и/или информационную точку формируют таким образом, что она имеет размер, отличающийся от других опорных точек и/или других информационных точек, и направление точечного изображения и предопределенной информационной группы определено различием размеров.
38. Способ формирования потокового точечного изображения по п. 1, отличающийся тем, что одну опорную точку и/или информационную точку формируют таким образом, что она имеет форму, отличающуюся от других опорных точек и/или других информационных точек, и направление точечного изображения и предопределенной информационной группы определено на основании различия форм.
39. Способ формирования потокового точечного изображения по п. 1, отличающийся тем, что информация, определяемая информационной точкой, представляет собой значения координат XY и/или значение кода.
40. Способ формирования потокового точечного изображения по п. 1, отличающийся тем, что располагают два или более потоковых точечных изображений, формирующих одно потоковое точечное изображение.
41. Способ формирования потокового точечного изображения по п. 40, отличающийся тем, что опорная точка, расположенная в предопределенном месте в потоковом точечном изображении, служит в качестве опорной точки для определения второй виртуальной опорной линии и/или направления точечного изображения и пары значений координат XY и/или значения кода.
42. Способ формирования потокового точечного изображения по одному из пп. 1-40, отличающийся тем, что множество опорных точек и множество виртуальных опорных точек располагают, по меньшей мере, на или вдоль реальной линии, видимым образом сформированной на поверхности носителя.
43. Способ формирования потокового точечного изображения по п. 1, отличающийся тем, что потоковое точечное изображение формируют на носителе путем напечатанного обозначения, индикации на дисплее или путем обеспечения сквозного отверстия или выпуклого/вогнутого изображения на носителе.
44. Способ формирования потокового точечного изображения по п. 43, отличающийся тем, что опорную точу и/или информационную точку печатают краской, обладающей свойством, заключающимся в реакции на световое излучение, отличающейся от реакции краски, используемой для печати видимой информации на поверхности носителя.
45. Способ формирования потокового точечного изображения по п. 44, отличающийся тем, что краска, обладающая свойством, заключающимся в отличающейся реакции, является невидимой.
46. Способ формирования потокового точечного изображения по п. 45, отличающийся тем, что световое излучение содержит инфракрасное излучение,
краска, обладающая некоторым свойством, включает краску, поглощающую в инфракрасном диапазоне, и
краска, используемая для печати видимой информации на поверхности носителя, содержит краску, пропускающую или отражающую инфракрасное излучение.
47. Оптическое считывающее устройство, отличающееся тем, что содержит:
оптическое считывающее средство для визуализации потокового точечного изображения, содержащего:
множество опорных точек, расположенных линейно согласно предопределенному правилу; и
информационную точку, которая расположена в конечной точке вектора, выраженного с одной из множества виртуальных опорных точек в качестве начальной точки, и информация которой определена по меньшей мере одним из расстояния и направления от виртуальных опорных точек,
где виртуальные опорные точки расположены в предопределенных местах на второй виртуальной опорной линии, вторая виртуальная опорная линия виртуально определена в предопределенном месте относительно опорных точек и/или первой виртуальной опорной линии и сформирована прямой линией и/или кривой, и первая виртуальная опорная линия виртуально расположена на множестве опорных точек и сформирована прямой линией или ломаной линией и/или кривой; и
средство анализа для анализа потокового точечного изображения и получения численных значений, определенных потоковым точечным изображением.
48. Способ считывания потокового точечного изображения, включающий:
визуализацию потокового точечного изображения, содержащего:
множество опорных точек, расположенных линейно согласно предопределенному правилу; и
информационную точку, которая расположена в конечной точке вектора, выраженного с одной из множества виртуальных опорных точек в качестве начальной точки, и информация которой определена по меньшей мере одним из расстояния и направления от виртуальных опорных точек,
где виртуальные опорные точки расположены в предопределенных местах на второй виртуальной опорной линии, вторая виртуальная опорная линия виртуально определена в предопределенном месте относительно опорных точек и/или первой виртуальной опорной линии и сформирована прямой линией и/или кривой, и первая виртуальная опорная линия виртуально расположена на множестве опорных точек и сформирована прямой линией или ломаной линией и/или кривой;
анализ данных изображения; и
получение численных значений, определенных потоковым точечным изображением, где указанные численные значения определены на основании расстояния и направления информационной точки по отношению к виртуальной опорной точке.
49. Электронное устройство, в памяти которого хранится программа для выполнения:
анализа данных изображения путем визуализации оптическим считывающим средством потокового точечного изображения, содержащего:
множество опорных точек, расположенных линейно согласно предопределенному правилу; и
информационную точку, которая расположена в конечной точке вектора, выраженного с одной из множества виртуальных опорных точек в качестве начальной точки, и информация которой определена по меньшей мере одним из расстояния и направления от виртуальных опорных точек, где виртуальные опорные точки расположены в предопределенных местах на второй виртуальной опорной линии, вторая виртуальная опорная линия виртуально определена в предопределенном месте относительно опорных точек и/или первой виртуальной опорной линии и сформирована прямой линией и/или кривой, и первая виртуальная опорная линия виртуально расположена на множестве опорных точек и сформирована прямой линией или ломаной линией и/или кривой; и
получения численных значений, определенных потоковым точечным изображением, где указанные численные значения определены на основании расстояния и направления информационной точки по отношению к виртуальной опорной точке.
50. Считывающее устройство для считывания потокового точечного изображения, которое содержит:
оптическое считывающее средство для визуализации потокового точечного изображения, содержащего:
множество опорных точек, расположенных линейно согласно предопределенному правилу; и
информационную точку, которая расположена в конечной точке вектора, выраженного с одной из множества виртуальных опорных точек в качестве начальной точки, и информация которой определена по меньшей мере одним из расстояния и направления от виртуальных опорных точек,
где виртуальные опорные точки расположены в предопределенных местах на второй виртуальной опорной линии, вторая виртуальная опорная линия виртуально определена в предопределенном месте относительно опорных точек и/или первой виртуальной опорной линии и сформирована прямой линией и/или кривой, и первая виртуальная опорная линия виртуально расположена на множестве опорных точек и сформирована прямой линией или ломаной линией и/или кривой; и
средство анализа для анализа потокового точечного изображения, получения численных значений, определенных потоковым точечным изображением, где указанные численные значения определены на основании расстояния и направления информационной точки по отношению к виртуальной опорной точке, и управления устройством вывода информации на основании полученных численных значений.
51. Способ считывания потокового точечного изображения, включающий:
визуализацию потокового точечного изображения, содержащего:
множество опорных точек, расположенных линейно согласно предопределенному правилу; и
информационную точку, которая расположена в конечной точке вектора, выраженного с одной из множества виртуальных опорных точек в качестве начальной точки, и информация которой определена по меньшей мере одним из расстояния и направления от виртуальных опорных точек,
где виртуальные опорные точки расположены в предопределенных местах на второй виртуальной опорной линии, вторая виртуальная опорная линия виртуально определена в предопределенном месте относительно опорных точек и/или первой виртуальной опорной линии и сформирована прямой линией и/или кривой, и первая виртуальная опорная линия виртуально расположена на множестве опорных точек и сформирована прямой линией или ломаной линией и/или кривой;
анализ данных изображения;
получение численных значений, определенных потоковым точечным изображением, где указанные численные значения определены на основании расстояния и направления информационной точки по отношению к виртуальной опорной точке; и
управление устройством вывода информации на основании полученных численных значений.
52. Устройство обработки информации, которое содержит:
оптическое считывающее средство для визуализации потокового точечного изображения, содержащего:
множество опорных точек, расположенных линейно согласно предопределенному правилу; и
информационную точку, которая расположена в конечной точке вектора, выраженного с одной из множества виртуальных опорных точек в качестве начальной точки, и информация которой определена по меньшей мере одним из расстояния и направления от виртуальных опорных точек,
где виртуальные опорные точки расположены в предопределенных местах на второй виртуальной опорной линии, вторая виртуальная опорная линия виртуально определена в предопределенном месте относительно опорных точек и/или первой виртуальной опорной линии и сформирована прямой линией и/или кривой, и первая виртуальная опорная линия виртуально расположена на множестве опорных точек и сформирована прямой линией или ломаной линией и/или кривой; и
средство анализа для анализа данных изображения, получения численных значений, определенных потоковым точечным изображением, где указанные численные значения определены на основании расстояния и направления информационной точки по отношению к виртуальной опорной точке, и выполнения обработки, соответствующей декодированным численным значениям.
53. Устройство обработки информации по п. 52, в котором соответствующая обработка предназначена для вывода результата выполнения по меньшей одного из речи, изображения, динамического изображения, буквы и программы.
54. Электронное устройство, в памяти которого хранится программа для формирования потокового точечного изображения для выполнения способа формирования потокового точечного изображения по п. 1.
55. Устройство формирования потокового точечного изображения, которое запрограммировано для выполнения способа формирования потокового точечного изображения по п. 1.
56. Устройство вывода речи, которое содержит:
оптическое считывающее средство для визуализации потокового точечного изображения, содержащего:
множество опорных точек, расположенных линейно согласно предопределенному правилу; и
информационную точку, которая расположена в конечной точке вектора, выраженного с одной из множества виртуальных опорных точек в качестве начальной точки, и информация которой определена по меньшей мере одним из расстояния и направления от виртуальных опорных точек,
где виртуальные опорные точки расположены в предопределенных местах на второй виртуальной опорной линии, вторая виртуальная опорная линия виртуально определена в предопределенном месте относительно опорных точек и/или первой виртуальной опорной линии и сформирована прямой линией и/или кривой, и первая виртуальная опорная линия виртуально расположена на множестве опорных точек и сформирована прямой линией или ломаной линией и/или кривой;
средство анализа для анализа потокового точечного изображения и получения численных значений, определенных потоковым точечным изображением, где указанные численные значения определены на основании расстояния и направления информационной точки по отношению к виртуальной опорной точке; и
средство вывода речи для вывода речи, связанной с численными значениями, полученными средством анализа.
57. Устройство ввода/вывода информации, которое содержит:
оптическое считывающее средство для визуализации потокового точечного изображения, содержащего:
множество опорных точек, расположенных линейно согласно предопределенному правилу; и
информационную точку, которая расположена в конечной точке вектора, выраженного с одной из множества виртуальных опорных точек в качестве начальной точки, и информация которой определена по меньшей мере одним из расстояния и направления от виртуальных опорных точек,
где виртуальные опорные точки расположены в предопределенных местах на второй виртуальной опорной линии, вторая виртуальная опорная линия виртуально определена в предопределенном месте относительно опорных точек и/или первой виртуальной опорной линии и сформирована прямой линией и/или кривой, и первая виртуальная опорная линия виртуально расположена на множестве опорных точек и сформирована прямой линией или ломаной линией и/или кривой;
средство анализа для анализа потокового точечного изображения и получения численных значений, определенных потоковым точечным изображением, где указанные численные значения определены на основании расстояния и направления информационной точки по отношению к виртуальной опорной точке; и
средство выполнения по меньшей мере одного из вывода информации, связанной с численными значениями, полученными средством анализа, и выполнения связанной с ними программы.
58. Электронное устройство, в памяти которого хранится программа для осуществления:
анализа данных изображения, полученных путем визуализации оптическим считывающим средством потокового точечного изображения, содержащего:
множество опорных точек, расположенных линейно согласно предопределенному правилу; и
информационную точку, которая расположена в конечной точке вектора, выраженного с одной из множества виртуальных опорных точек в качестве начальной точки, и информация которой определена по меньшей мере одним из расстояния и направления от виртуальных опорных точек,
где виртуальные опорные точки расположены в предопределенных местах на второй виртуальной опорной линии, вторая виртуальная опорная линия виртуально определена в предопределенном месте относительно опорных точек и/или первой виртуальной опорной линии и сформирована прямой линией и/или кривой, и первая виртуальная опорная линия виртуально расположена на множестве опорных точек и сформирована прямой линией или ломаной линией и/или кривой;
получения численных значений, определенных потоковым точечным изображением, где указанные численные значения определены на основании расстояния и направления информационной точки по отношению к виртуальной опорной точке; и
выполнения по меньшей мере одного из вывода информации, связанной с численными значениями, полученными средством анализа, и выполнения связанной с ними программы.
| RU 2006126975 A, 27.01.2008 | |||
| Способ кодирования координат перемещающегося на экране вычислительного устройства видеоизображения, устройство для декодирования визуального объекта, закодированного этим способом, и система, предназначенная для визуализации активного видео с помощью этого устройства | 2003 |
|
RU2225035C1 |
| JP 2008210402 A, 11.09.2008 | |||
| JP 2007012016 A, 18.01.2007 | |||
| JPH 11316795 A, 16.11.1999. | |||

