ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к системе зарядки аккумулятора для транспортного средства, способу управления зарядкой, по меньшей мере, одного аккумулятора в упомянутой системе зарядки аккумулятора и компьютерному программному продукту в соответствии с преамбулами независимых пунктов формулы изобретения.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Изобретение целесообразно применять в длинных транспортных средствах, например, автобусах. Обычно двигатель размещается в задней части автобуса, а аккумуляторы - в передней части с целью оптимизации распределения веса транспортного средства. Такие раздельные положения означают, что между источником энергии и аккумуляторами должны проходить длинные кабели. Сопротивление этих длинных кабелей в совокупности с крупными энергопотребляющими блоками в автобусе, например вентиляторами и кондиционерами, вызывает падения напряжения между кабелями и пластиной заземления. В различных точках на пластине заземления могут подключаться нагрузки. При возникновении значительных нагрузок, например, при включении кондиционирования воздуха между генераторами электрического тока и аккумуляторами автобуса могут возникать падения напряжения до одного или нескольких вольт. Это означает, что напряжение зарядки системы аккумуляторов становится ниже, чем требуется, в результате чего аккумуляторы не заряжаются с той эффективностью, с которой они могли бы заряжаться. Низкий уровень зарядки аккумуляторов также приводит к сокращению срока службы аккумуляторов.
Энергопотребляющие блоки могут подключаться в различных точках в зарядной цепи, которая включает в себя источник энергии и аккумуляторы. Данная цепь также часто выполняется в различных автобусах различными способами, поскольку эти блоки подключаются в цепи в любой наиболее подходящей точке, например исходя из требований по размещению. В зависимости от того, как они подключаются и как выполнена пластина заземления в конкретном случае, сопротивление из-за одного или более энергопотребляющих блоков будет различаться. Возникающее падение напряжения вследствие этого будет различаться в зависимости от того, какие блоки подключаются и от конфигурации цепи в конкретном случае, например в определенном транспортном средстве.
Проблема в этой связи состоит в том, что вычисление сопротивления цепи и последующего падения напряжения между источником энергии и аккумуляторами является занимающей много времени операцией. Предварительное измерение цепи и регулировка напряжения на основе измеренного значения занимают очень много времени, поскольку сопротивление в цепи различается от транспортного средства к транспортному средству в зависимости от конфигурации цепи и от того, какие блоки подключены в данный момент времени.
В настоящее время известны системы, предназначенные для автобусов и грузовых автомобилей и имеющие функцию адаптивной зарядки аккумулятора, которая использует расчетную температуру аккумулятора, чтобы определить, насколько высокое напряжение потребовать от источника электроэнергии во время зарядки. Однако эта функция зависит от датчиков температуры. Известная функция адаптивной зарядки аккумулятора не учитывает последствия, которые возникают из-за изменяющихся сопротивлений в цепи или из-за раздельных положений аккумуляторов и источника электроэнергии в транспортном средстве.
В связи с этим авторы настоящего изобретения выявили потребность в функции адаптивной зарядки аккумулятора, которая учитывает сопротивления в зарядной цепи, различающиеся в разных автобусах, и адаптируется к ним без необходимости выполнения предварительного измерения сопротивления цепи для различных ситуаций.
В нижеперечисленных опубликованных патентах и заявках на патенты описаны различные решения в этой области.
В US2009051325 описана система регулирования для зарядки аккумулятора в транспортном средстве, при помощи которой выходное напряжение с источника энергии корректируется на основе требуемого зарядного напряжения в совокупности с напряжением смещения, которое зависит от фактического тока, подаваемого в аккумулятор. Система включает в себя датчики температуры для контроля температуры в источнике энергии. В тех случаях, когда кабели имеют фиксированную длину, система может также калиброваться по их сопротивлению.
В JP2307338 описана система для компенсации падения напряжения путем вычисления ожидаемого падения напряжения из-за длины кабеля, а затем измерения тока и напряжения с последующей коррекцией напряжения от генератора.
В WO2005060066 описано зарядное устройство для зарядки множества аккумуляторов, последовательно соединенных в транспортном средстве. Данное устройство подключено к генератору со встроенным регулятором зарядки через первую линию и с выходом генератора через вторую линию. Первая линия используется для обратной связи с регулятором зарядки таким образом, что на выходе генератора получается требуемое выходное напряжение.
В US6404163 описан способ управления зарядным напряжением на аккумуляторе в транспортном средстве. Вычисляется оптимальное зарядное напряжение для аккумулятора, служащее в качестве входной информации для генератора, чтобы обеспечить подачу им в аккумулятор надлежащего зарядного напряжения.
В US5182510 описана система для зарядки аккумулятора с помощью генератора, использующего выпрямитель-регулятор. Регулируемое напряжение компенсирует падение напряжения, которое возникает в кабеле между выпрямителем и аккумулятором.
В US2008100269 описана регулирующая система для генератора в транспортном средстве, посредством которой выходное напряжение генератора и напряжение аккумулятора измеряются и сравниваются с целевым значением, чтобы определить, имеются ли в цепи неисправности.
В US2010127668 описан способ компенсации падения напряжения, которое возникает в кабеле между аккумулятором и зарядным устройством. Данный способ включает в себя сначала вычисление падения напряжения в кабеле, а затем использование сохраненного значения для коррекции зарядного напряжения.
В WO9210019 описан регулятор напряжения для генератора, который заряжает аккумулятор в транспортном средстве. Падение напряжения между аккумулятором и генератором компенсируется вычислением падения напряжения на основе тока генератора и сопротивления кабеля.
Задачей настоящего изобретения является поддержание зарядного напряжения на оптимальном уровне путем компенсации падения напряжения, которое возникает на пути из источника электроэнергии в аккумуляторы.
Еще одной задачей является предложение функции адаптивной зарядки аккумулятора, которая не зависит от дополнительных датчиков.
Еще одной задачей является предложение функции адаптивной зарядки аккумулятора, которая не зависит от точного сопротивления цепи, изменяющегося в зависимости от величины и использования нагрузок и их подключения по отношению к зарядной цепи, что приводит к отсутствию необходимости в калибровке цепи.
Еще одной задачей является поддержание напряжения аккумулятора на уровне, вычисляемом как оптимальный в соответствии с вышеупомянутой известной системой адаптивной зарядки, в настоящее время часто используемой в автобусах.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Вышеуказанные задачи решаются с помощью изобретения, определяемого независимыми пунктами формулы изобретения.
Предпочтительные варианты осуществления определены зависимыми пунктами формулы изобретения.
Настоящее изобретение относится к системе зарядки аккумулятора, которая регулирует уровень напряжения аккумулятора на основе падения напряжения в данный момент времени.
Преимущество изобретения состоит в том, что падение зарядного напряжения не обязательно должно уменьшаться путем снижения сопротивления зарядной цепи с помощью более длинных и/или дополнительных электрических проводов, которые являются дорогостоящими, увеличивают вес и оказывают отрицательное влияние на окружающую среду.
Поскольку настоящее изобретение относится к системе зарядки аккумулятора с обратной связью, для достижения требуемого зарядного напряжения аккумулятора не нужны никакие изменения кабельного соединения. Обратная связь компенсирует падение напряжения, поэтому нет необходимости в прокладке более мощных кабелей для снижения падения напряжения в цепи и нет необходимости в подключении потребителей энергии в других точках в цепи с целью предотвращения падений напряжения.
В соответствии с одним вариантом осуществления, система зарядки аккумулятора содержит источник электроэнергии, выполненный с возможностью подачи зарядного напряжения, по меньшей мере, на один аккумулятор, с использованием одного или более создающих сопротивление блоков R1-R11 и RL1-RL3, подключенных к системе. Создающие сопротивление блоки включают в себя проводники между источником энергии, аккумуляторами и энергопотребляющими блоками с линейным сопротивлением R1-R11 и энергопотребляющими блоками, которые имеют сопротивление RL1-RL3. Проводники могут представлять собой, например, кабельное соединение и/или рамную конструкцию. Энергопотребляющие блоки могут, например, включать в себя кондиционирование воздуха, дополнительный нагреватель, вентиляцию, преобразователь переменного тока на 230 В, но могут включать в себя и другие системы на транспортном средстве, которые потребляют энергию. Система также включает в себя регулятор, выполненный с возможностью непрерывного приема величины, соответствующей зарядному напряжению Vd, требуемому в данный момент времени, и величины, соответствующей напряжению Vbat аккумулятора в данный момент времени для системы аккумуляторов, и использования этих величин в качестве основы для непрерывного вычисления зарядного напряжения Vcalc, подаваемого от источника электроэнергии и необходимого для обеспечения упомянутого требуемого зарядного напряжения Vd, причем регулятор выполнен с возможностью генерирования управляющего сигнала S, который содержит управляющую команду на источник электроэнергии для подачи вычисленного зарядного напряжения Vcalc.
В соответствии с еще одним вариантом изобретения настоящее изобретение относится к способу управления зарядкой, по меньшей мере, одного аккумулятора в упомянутой системе зарядки аккумулятора.
Преимущество способа управления зарядкой, по меньшей мере, одного аккумулятора в системе зарядки аккумулятора, такой как система в соответствии с изобретением, состоит в том, что он может быть реализован в виде программного обеспечения в существующем блоке управления транспортного средства.
В соответствии с одним вариантом осуществления изобретения регулятор представляет собой пропорционально-интегрально-дифференциальный регулятор (ПИД-регулятор).
В соответствии с еще одним вариантом настоящего изобретения данное изобретение относится также к компьютерному программному продукту, включающему в себя этапы программы для применения способа.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На фиг. 1 изображена система зарядки аккумулятора для транспортного средства в соответствии с настоящим изобретением.
Фиг. 2 представляет собой схематическое изображение системы зарядки аккумулятора в соответствии с одним вариантом осуществления изобретения с множеством подключенных создающих сопротивление блоков.
На фиг. 3 схематически показано, как осуществляется управление источником электроэнергии в системе в соответствии с одним вариантом осуществления.
Фиг. 4 иллюстрирует поведение системы зарядки аккумулятора в соответствии с одним вариантом осуществления изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Данное изобретение подробно описывается ниже со ссылкой на прилагаемые чертежи.
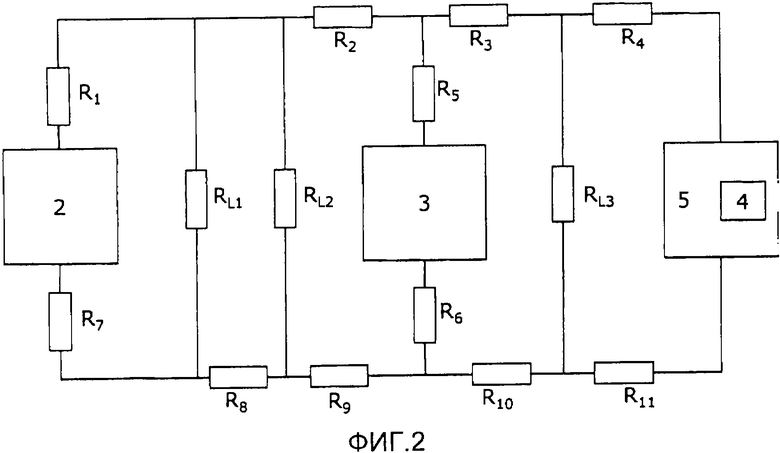
На фиг. 1 изображена система 1 зарядки аккумулятора в соответствии с настоящим изобретением. Система 1 содержит источник 2 электроэнергии, выполненный с возможностью подачи зарядного напряжения, по меньшей мере, в один аккумулятор 3 с использованием одного или более создающих сопротивление блоков, подключенных к системе. Система дополнительно содержит регулятор 4, выполненный с возможностью непрерывного приема величины, представляющей зарядное напряжение Vd, требуемое в данный момент времени, и величины, представляющей напряжение Vbat аккумулятора в данный момент времени для упомянутого, по меньшей мере, одного аккумулятора 3, и использования этих величин в качестве основы для непрерывного вычисления зарядного напряжения Vcalc, подаваемого от источника 2 электроэнергии и необходимого для достижения упомянутого требуемого зарядного напряжения Vd, причем регулятор 4 выполнен с возможностью генерирования управляющего сигнала S, который содержит управляющую команду на источник 2 электроэнергии для подачи вычисленного зарядного напряжения Vcalc.
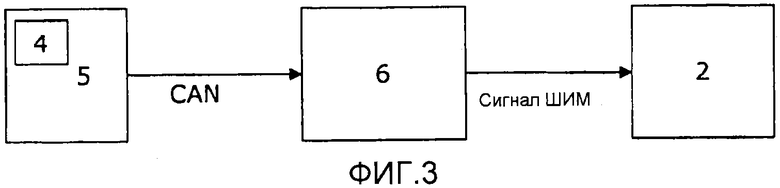
Фиг. 2 представляет собой схематическое изображение системы 1 зарядки аккумулятора с множеством создающих сопротивление блоков R1-R11, RL1-RL3, которые подключены между источником 2 электроэнергии, упомянутым, по меньшей мере, одним аккумулятором 3 и регулятором 4 и которые различными способами создают сопротивление. Создающие сопротивление блоки в виде проводников в данном случае называются R1-R11. Проводники могут представлять собой электрические линии и/или пластину заземления транспортного средства (называемую также заземлением шасси). В зависимости от конкретной конфигурации сопротивления проводников, разумеется, могут быть в количестве больше или меньше одиннадцати, а соответствующее сопротивление R каждого проводника может варьироваться в зависимости от его удельного электрического сопротивления, длины и площади поперечного сечения. Создающие сопротивление блоки включают в себя не только сопротивление R проводника, но в данном случае и три подключенных энергопотребляющих блока RL1-RL3, например, блоки кондиционирования воздуха. Число подключенных энергопотребляющих блоков RL, разумеется, может варьироваться в зависимости от конкретной конфигурации. Чем больше энергии они потребляют, тем больше токи, которые проходят через создающие сопротивление блоки R1, и тем больше последующее падение напряжения.
На фиг. 2 регулятор 4 расположен в управляющем блоке 5. В соответствии с одним вариантом осуществления вычисляется величина, представляющая напряжение Vbat аккумулятора в данный момент времени. Напряжение управляющего блока 5 при этом служит в качестве величины, представляющей напряжение Vbat аккумулятора в данный момент времени для упомянутого, по меньшей мере, одного аккумулятора 3. Альтернативный способ достижения напряжения Vbat аккумулятора в данный момент времени состоит в измерении его непосредственно на полюсах упомянутого, по меньшей мере, одного аккумулятора, но для этого требуется дополнительное кабельное соединение и вследствие этого более дорогостоящая система.
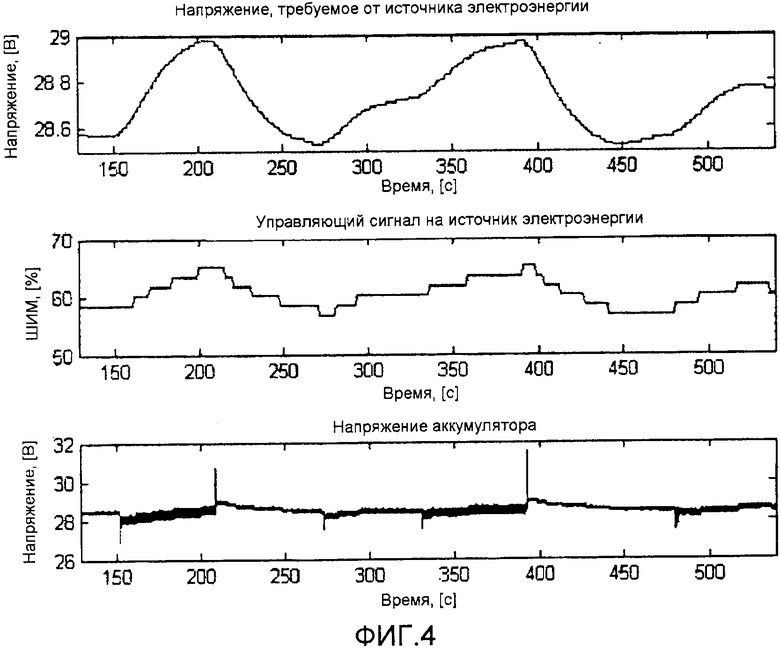
На фиг. 3 схематически показано, как осуществляется управление источником 2 электроэнергии в системе в соответствии с одним вариантом осуществления. Зарядное напряжение для источника электроэнергии вычисляется в управляющем блоке 5 и преобразуется в процентное значение. Процентное значение отправляется в блок 6 управления двигателем, в котором на основе принятого значения формируется сигнал широтно-импульсной модуляции (ШИМ). Этот сигнал проходит между управляющим блоком 5 и блоком 6 управления двигателем по сети передачи данных (CAN) транспортного средства. Сигнал ШИМ отправляется в источник 2 электроэнергии, который создает зарядное напряжение.
В соответствии с одним вариантом осуществления регулятор 4 представляет собой ПИД-регулятор, но могут использоваться и другие виды подходящего регулятора. Управление ПИД-регулятором осуществляется с помощью множества предварительно заданных фиксированных параметров, относящихся к транспортному средству, т.е. фиксированные параметры определяются заранее, поэтому ПИД-регулятор с использованием этих параметров может использоваться повсеместно, например, для автобуса без необходимости регулировки этих параметров применительно к подключенным блокам в конкретном автобусе. ПИД-регулятор включает в себя три параметра, а именно пропорциональный элемент, интегральный элемент и дифференциальный элемент. ПИД-регулятор выполнен таким образом, чтобы обеспечивать для определенного типа транспортного средства оптимальное соотношение между тремя своими элементами с целью достижения его необходимого поведения. Существуют различные систематические способы итеративной точной регулировки параметров для достижения необходимого результата. Применимым способом регулировки и выявления параметров для регулятора является способ управления с внутренней моделью (IMC). ПИД-регулятор может быть реализован последовательно или подключен параллельно. Преимущество параллельного подключения состоит в том, что элементы П, И и Д могут быть реализованы по отдельности, а затем объединены. Это упрощает проверку различных значений для различных параметров без влияния на параметры регулятора, отличные от параметра, который имеет значение в данный момент времени.
Регулятор может описываться формулой
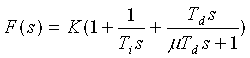
в которой K - пропорциональный элемент, K/Ti - интегральный элемент, Tds/(µTds+1) - дифференциальный элемент, а µ - константа, которая рассматривается ниже.
Параметры для ПИД-регулятора выбираются путем изучения отклика системы на ступенчатое воздействие. По отклику на ступенчатое воздействие можно построить трехпараметрическую модель, которая описывает систему. Параметры для ПИД-регулятора могут при этом определяться систематически посредством трехпараметрической модели следующего вида
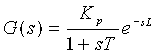
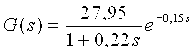
Значения для параметров считываются в отклике на ступенчатое воздействие для системы без обратной связи. В ней в соответствии с примером:
L=0,15 с означает задержку с момента ступенчатого воздействия до отклика в выходном сигнале,
Kp=27,95 В означает конечную величину, достигаемую для отклика на ступенчатое воздействие,
Т=0,22 с означает временную константу для системы, которая вычисляется как время от L до момента времени, в который система достигает 0,63% от своего конечного значения.
Эти параметры по отклику на ступенчатое воздействие приводят к трехпараметрической модели
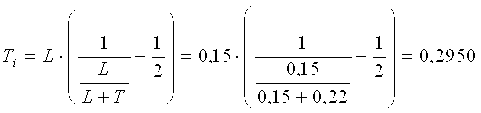
Параметры для ПИД-регулятора вычисляются по трехпараметрической модели путем применения способа IMC. Способ IMC использует только новую информацию в измеренном сигнале в качестве сигнала обратной связи. Способ IMC выбирает параметры, как описано ниже, в которых Tc - единственный конструктивный параметр, а остальные три берутся из трехпараметрической модели. Tc - это требуемая временная константа для системы с обратной связью, а T - это требуемая временная константа для системы без обратной связи. 


Результатом с вычисленными значениями для ПИД-регулятора в параллельном виде является регулятор

Реализация регулятора 4 предполагает выполнение определенных регулировок, при этом величина µ выбирается равной 0,2, но является регулируемым параметром. Чтобы реализовать регулятор, используется цифровая реализация.
Поскольку сопротивление в системе 1 со временем меняется из-за изменяющихся подключенных потребителей тока RL и, кроме того, изменения необходимого зарядного напряжения, предпочтительна относительно частая выборка, поэтому частота выборки для системы зарядки аккумулятора составляет от 1,4 до 3,4 Гц, а предпочтительно - около 2 Гц, но в зависимости от конфигурации системы могут быть применимы и другие частоты выборки.
Подключенные создающие сопротивление блоки R1-R11, RL1-RL3 выполнены в виде сопротивлений в электрических линиях R1-R11 и/или подключенных потребителей тока RL1-RL3, например, в виде кондиционирования воздуха или вентиляторов. Эти создающие сопротивление блоки меняются со временем.
Фиг. 4 включает в себя три графика поведения системы зарядки аккумулятора. На верхнем графике показано напряжение, требуемое от источника электроэнергии, на среднем графике показан управляющий сигнал на источник электроэнергии, например сигнал с широтно-импульсной модуляцией (ШИМ), а на нижнем графике показано зарядное напряжение. Положительные максимумы возникают в уровне напряжения аккумулятора в тех случаях, когда от системы отключается большая нагрузка. В тех случаях, когда на графике возникают отрицательные максимумы, большая нагрузка была подключена. Система компенсирует падения напряжения, требуя от источника электроэнергии более высокое напряжение, что приводит к росту напряжения аккумулятора. Пример этого можно видеть на графике с момента времени 150 с приблизительно до 200 с.
Система 3 аккумуляторов предпочтительно подходит для использования в автобусе, который содержит источник 2 электроэнергии, расположенной в его задней части, и, по меньшей мере, один аккумулятор 3 - в его передней части.
Настоящее изобретение относится также к способу управления зарядкой, по меньшей мере, одного аккумулятора в системе зарядки аккумулятора для транспортного средства, причем система включает в себя источник 2 электроэнергии, выполненный с возможностью подачи зарядного напряжения, по меньшей мере, на один аккумулятор 3 с использованием одного или более создающих сопротивление блоков R1-R11, RL1-RL3, подключенных к системе. Данный способ включает в себя этапы:
- непрерывного приема величины, представляющей зарядное напряжение Vd, требуемое в данный момент времени в регуляторе 4,
- непрерывного приема величины, представляющей напряжение Vbat аккумулятора в данный момент времени для упомянутого, по меньшей мере, одного аккумулятора 3 в упомянутом регуляторе 4,
- непрерывного вычисления зарядного напряжения Vcalc, подаваемого от источника 2 электроэнергии и необходимого для достижения упомянутого требуемого зарядного напряжения Vd на основе зарядного напряжения Vd, требуемого в данный момент времени, и напряжения Vbat аккумулятора в данный момент времени для системы 3 аккумуляторов, и
- генерирования управляющего сигнала S, который содержит управляющую команду на источник 2 электроэнергии для подачи вычисленного зарядного напряжения Vcalc.
В соответствии с одним вариантом осуществления данного способа регулятор 4 является ПИД-регулятором.
В соответствии с одним вариантом осуществления данного способа управление регулятором 4 осуществляется с помощью множества предварительно заданных фиксированных параметров, относящихся к транспортному средству.
В соответствии с еще одним вариантом осуществления данного способа вычисляется величина, представляющая напряжение Vbat аккумулятора в данный момент времени для упомянутого, по меньшей мере, одного аккумулятора 3.
В соответствии с одним вариантом осуществления данного способа частота выборки для системы 1 зарядки аккумулятора составляет около 2 Гц.
Настоящее изобретение относится также к компьютерному программному продукту, включающему в себя этапы программы для применения вышеуказанного способа.
Настоящее изобретение не ограничивается вышеописанными предпочтительными вариантами осуществления. Могут использоваться различные альтернативы, модификации и эквиваленты. Поэтому вышеописанные варианты осуществления не должны рассматриваться как ограничивающие объем охраны изобретения, который определяется прилагаемой формулой изобретения.
Использование: в области электротехники. Технический результат - повышение надежности. Система обнаружения неисправностей содержит источник (2) электроэнергии, выполненный с возможностью подачи зарядного напряжения на аккумулятор (3), с использованием одного или более создающих сопротивление блоков (R, RL), подключенных к системе. Система (1) дополнительно содержит регулятор (4), выполненный с возможностью непрерывного приема величины, представляющей зарядное напряжение (Vd), требуемое в данный момент времени, и величины, представляющей напряжение (Vbat) аккумулятора в данный момент времени и использования этих величин в качестве основы для непрерывного вычисления зарядного напряжения (Vcalc), подаваемого от источника (2) электроэнергии и необходимого для достижения требуемого зарядного напряжения (Vd). Регулятор выполнен также с возможностью генерирования управляющего сигнала (S), который содержит управляющую команду на источник (2) электроэнергии для подачи вычисленного зарядного напряжения (Vcalc). 2 н. и 11 з.п. ф-лы, 4 ил.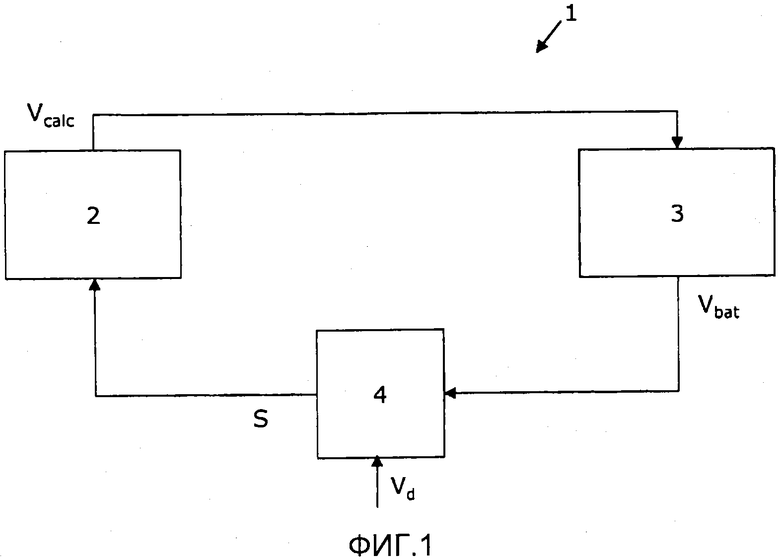
1. Система (1) зарядки аккумулятора для транспортного средства, содержащая:
источник (2) электроэнергии, выполненный с возможностью подачи зарядного напряжения, по меньшей мере, на один аккумулятор (3), с использованием одного или более создающих сопротивление блоков (R1-R11, RL1-RL3), подключенных к системе (1) и
регулятор (4), выполненный с возможностью непрерывного приема величины, представляющей зарядное напряжение (Vd), требуемое в данный момент времени, и величины, представляющей напряжение (Vbat) аккумулятора в данный момент времени для упомянутого, по меньшей мере, одного аккумулятора (3), и использования этих величин в качестве основы для непрерывного вычисления зарядного напряжения (Vcalc), подаваемого от источника (2) электроэнергии и необходимого для достижения упомянутого требуемого зарядного напряжения (Vd), причем регулятор (4) выполнен с возможностью генерирования управляющего сигнала (S), который содержит управляющую команду на источник (2) электроэнергии для подачи вычисленного зарядного напряжения (Vcalc) и расположен в управляющем блоке (5),
отличающаяся тем,
что величина, представляющая напряжение (Vbat) аккумулятора в данный момент времени для упомянутого, по меньшей мере, одного аккумулятора (3), вычисляется на основе напряжения управляющего блока (5).
2. Система зарядки аккумулятора по п. 1, в которой регулятор (4) является ПИД-регулятором.
3. Система зарядки аккумулятора по п. 1, в которой управление регулятором (4) осуществляется с помощью множества предварительно заданных фиксированных параметров, относящихся к транспортному средству.
4. Система зарядки аккумулятора по п. 1, в которой период выборки для системы (1) зарядки аккумулятора составляет около 2 Гц.
5. Система зарядки аккумулятора по п. 1, в которой подключенные создающие сопротивление блоки (R1-R11, RL1-RL3) выполнены в виде сопротивлений в проводниках (R1-R11) и/или подключенных потребителей тока (RL1 _RL3).
6. Система зарядки аккумулятора по п. 5, в которой число подключенных потребителей тока (RL1-RL3) изменяется со временем.
7. Система зарядки аккумулятора по п. 1, в которой источник (2) электроэнергии расположен в задней части транспортного средства, а упомянутый, по меньшей мере, один аккумулятор (3) - в передней части транспортного средства или наоборот.
8. Способ управления зарядкой, по меньшей мере, одного аккумулятора в системе (1) зарядки аккумулятора для транспортного средства, которая включает в себя источник (2) электроэнергии, выполненный с возможностью подачи зарядного напряжения, по меньшей мере, на один аккумулятор (3) с использованием одного или более создающих сопротивление блоков (R1-R11, RL1 _RL3), подключенных к системе, причем данный способ включает в себя этапы:
- непрерывного приема величины, представляющей зарядное напряжение (Vd), требуемое в данный момент времени в регуляторе (4),
- непрерывного приема величины, представляющей напряжение (Vbat) аккумулятора в данный момент времени для упомянутого, по меньшей мере, одного аккумулятора (3) в упомянутом регуляторе (4),
- непрерывного вычисления зарядного напряжения (Vcalc), подаваемого от источника (2) электроэнергии и необходимого для достижения упомянутого требуемого зарядного напряжения (Vd) на основе зарядного напряжения (Vd), требуемого в данный момент времени, и напряжения (Vbat) аккумулятора в данный момент времени, по меньшей мере, для одного аккумулятора (3), и
- генерирования управляющего сигнала (S), который содержит управляющую команду на источник (2) электроэнергии для подачи вычисленного зарядного напряжения (Vcalc) таким образом, что регулятор (4) расположен в управляющем блоке (5), а величина, представляющая напряжение (Vbat) аккумулятора в данный момент времени для системы аккумуляторов, вычисляется на основе напряжения управляющего блока (5).
9. Способ по п. 8, в котором регулятор (4) является ПИД-регулятором.
10. Способ по п. 8, в котором управление регулятором (4) осуществляется с помощью множества предварительно заданных фиксированных параметров, относящихся к транспортному средству.
11. Способ в системе зарядки аккумулятора по любому из пп. 8-10, в котором период выборки для системы (1) зарядки аккумулятора составляет около 2 Гц.
| WO 9210019A1, 11.06.1992 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ ЗАРЯДОМ АККУМУЛЯТОРНОЙ БАТАРЕИ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2025862C1 |
| УСТРОЙСТВО ДЛЯ ЗАРЯДА АККУМУЛЯТОРА | 2000 |
|
RU2206166C2 |
| US 6404163B1, 11.06.2002. | |||

