ОБЛАСТЬ ТЕХНИКИ
Варианты реализации, описанные ниже, относятся к вибрационным измерителям и, более конкретно, к способу и аппарату для определения дифференциальных параметров потока для системы измерения расхода флюида с множественными вибрационными измерителями.
УРОВЕНЬ ТЕХНИКИ
Вибрационные датчики, например вибрационные денситометры и расходомеры Кориолиса, хорошо известны и используются для измерения массового расхода и получения другой информации о материалах, текущих в трубопроводе расходомера. Примерные расходомеры Кориолиса раскрыты в Патенте США 4109524, Патенте США 4491025, и Re. 31,450, все от J.E.Smith и др. Эти расходомеры имеют один или несколько трубопроводов, прямой или изогнутой конфигурации. Каждая конфигурация трубопровода в массовом расходомере Кориолиса имеет набор собственных колебательных мод, которые могут быть простыми изгибными, крутильными или модами связанного типа. В каждом трубопроводе могут быть возбуждены колебания на предпочтительной моде.
Материал втекает в расходомер из присоединенного магистрального трубопровода со стороны впускного отверстия расходомера, направляется через трубопровод(-ы) и выходит из расходомера со стороны выпускного отверстия расходомера. Собственные колебательные моды колеблющейся и заполненной материалом системы отчасти определяются объединенной массой трубопроводов и материала, текущего внутри трубопроводов.
Когда поток через расходомер отсутствует, приводная сила, приложенная к трубопроводу(-ам), заставляет все точки вдоль трубопровода(-ов) осциллировать с одинаковой фазой или с малым "смещением нуля", которое представляет собой временную задержку, измеренную при нулевом потоке. Как только материал начинает течь через расходомер, силы Кориолиса приводят к тому, что каждая точка вдоль трубопровода(-ов) имеет отличающуюся фазу. Например, фаза у впускного конца расходомера отстает от фазы в центрированном положении привода, тогда как фаза при выпуске опережает фазу в центрированном положении привода. Измерительные преобразователи на трубопроводе(-ах) производят синусоидальные сигналы, отображающие движение трубопровода(-ов). Снимаемые с измерительных преобразователей сигналы обрабатываются для определения временной задержки между измерительными преобразователями. Временная задержка между двумя или несколькими измерительными преобразователями пропорциональна массовому расходу материала, текущего через трубопровод(-ы).
Измерительная электроника, соединенная с приводом, создает приводной сигнал для управления приводом и определяет массовый расход и другие свойства материала по сигналам, принятым от измерительных преобразователей. Привод может содержать одну из многих известных конструкций; однако магнит и противостоящая приводная индукционная катушка получили наибольшее распространение в производстве вибрационных измерителей. Переменный ток проходит через приводную индукционную катушку, заставляя колебаться расходомерные трубопровод(-ы) с желаемой амплитудой и частотой. Обычно, в данной области техники измерительные преобразователи представляют собой конструкцию из магнита и индукционной катушки, очень похожую на конструкцию привода. Однако если привод принимает ток, который задает движение, то измерительные преобразователи могут использовать обеспечиваемое приводом движение для вырабатывания напряжения. Величина временной задержки, измеряемая измерительными преобразователями, очень мала и часто измеряется в наносекундах. Поэтому необходимо иметь очень точный выходной сигнал преобразователя.
Как правило, расходомер Кориолиса изначально калибруется, и может быть создан коэффициент калибровки расхода, наряду со смещением нуля. При использовании коэффициент калибровки расхода может быть умножен на время задержки, измеренное измерительными преобразователями минус смещение нуля, для получения массового расхода. В большинстве ситуаций расходомер Кориолиса изначально откалиброван, обычно изготовителем, и предполагается, что обеспечиваются точные измерения без необходимости в последующих калибровках. Кроме того, подход техники предшествующего уровня предполагает калибровку нуля пользователем расходомера после его установки, останавливая поток, перекрывая клапаны и поэтому предоставляя опорный нулевой расход в рабочих условиях.
Как упомянуто выше, во многих вибрационных датчиках, включая расходомеры Кориолиса, может присутствовать смещение нуля, которое изначально корректируется в подходах техники предшествующего уровня. И хотя это изначально определенное смещение нуля может адекватно скорректировать измерения при ограниченных обстоятельствах, смещение нуля может изменяться со временем вследствие изменений разнообразных эксплуатационных режимов, главным образом - вследствие изменений температуры, приводя только к частичным коррекциям. Однако другие эксплуатационные режимы также могут влиять на смещение нуля, включая давление, плотность флюида, условия монтажа датчика и т.д. Кроме того, смещение нуля может в различной степени варьироваться от одного измерителя к другому. Это может быть особенно важно в ситуациях, когда более одного измерителя связываются последовательно так, что каждый из измерителей должен считывать одно и то же, если измеряется один и тот же расход флюида. Примерами таких ситуаций являются применения в измерении потребления топлива и регистрации утечки топлива.
Известно, что для определения дифференциального смещения нуля два измерителя конфигурируются так, чтобы считывать по существу один и тот же расход, когда расход текущего через измерители флюида по существу одинаков, как предлагается Международной Публикацией WO/2011/019344, которая передана настоящим заявителям и, тем самым, включена здесь во всем объеме посредством ссылки. Однако все же имеется потребность в улучшении дифференциальных измерений, получаемых от системы с множественными датчиками. Описанные ниже варианты реализации преодолевают эту и другие проблемы, и достигается усовершенствование в данной области техники. Описанные ниже варианты реализации улучшают дифференциальное измерение потока, получаемое от двух или нескольких вибрационных измерителей, вводя отсечку малого дифференциального потока, которая корректирует определяемый дифференциальный поток наряду с другими параметрами потока, если определяемый дифференциальный поток оказывается ниже порогового значения или диапазона значений.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Система измерения расхода флюида предоставляется в соответствии с вариантом реализации. Система измерения расхода флюида включает в себя магистральный трубопровод с текущим флюидом и первым вибрационным измерителем, включающим в себя первую сборку датчика, расположенную внутри магистрального трубопровода и сконфигурированную для определения одного или нескольких параметров потока, включая в себя первый расход. В соответствии с вариантом реализации система измерения расхода флюида дополнительно включает в себя второй вибрационный измеритель, включающий в себя вторую сборку датчика, расположенную внутри магистрального трубопровода и связанную флюидом с первой сборкой датчика и сконфигурированную для определения одного или нескольких параметров потока, включая в себя второй расход. В соответствии с вариантом реализации система измерения расхода флюида дополнительно содержит системный контроллер, электрически связанный по меньшей мере с одним из первого или второго вибрационных измерителей. Системный контроллер сконфигурирован для приема первого и второго расходов и определения дифференциального расхода на основании первого и второго расходов. В соответствии с вариантом реализации системный контроллер дополнительно сконфигурирован для сравнения дифференциального расхода с пороговым значением или диапазоном значений и для коррекции одного или нескольких параметров потока, если дифференциальный расход оказывается меньше, чем пороговое значение или диапазон значений.
Измерительная электроника для первой сборки датчика, расположенной внутри магистрального трубопровода и связанной флюидом со второй сборкой датчика вибрационного измерителя, электрически связанной с измерительной электроникой, предоставляется в соответствии с вариантом реализации. Измерительная электроника сконфигурирована для приема сигналов датчика от первой сборки датчика и определения одного или нескольких параметров потока, включая в себя первый расход флюида.
В соответствии с вариантом реализации измерительная электроника дополнительно сконфигурирована для приема второго расхода флюида от второго вибрационного измерителя и для определения дифференциального расхода на основании первого и второго расходов флюида. В соответствии с вариантом реализации измерительная электроника дополнительно сконфигурирована для сравнения дифференциального расхода с пороговым значением или диапазоном значений и для коррекции одного или нескольких параметров потока, если дифференциальный расход оказывается меньше, чем пороговое значение или диапазон значений.
Способ эксплуатации системы измерения расхода флюида, включающей в себя первый вибрационный измеритель и второй вибрационный измеритель, связанный флюидом с первым вибрационным измерителем, предоставляется в соответствии с вариантом реализации. Способ содержит этап приема сигналов первого датчика от первого вибрационного измерителя и приема сигналов второго датчика от второго вибрационного измерителя. В соответствии с вариантом реализации способ дополнительно содержит этапы определения одного или нескольких параметров потока, включая в себя первый и второй расход, на основании сигналов первого и второго датчика, и определение дифференциального расхода на основании первого и второго расходов. В соответствии с вариантом реализации способ дополнительно содержит этапы сравнения дифференциального расхода с пороговым значением или диапазоном значений и коррекции одного или нескольких параметров потока, если дифференциальный расход оказывается меньше, чем пороговое значение или диапазон значений.
ОБЪЕКТЫ
В соответствии с объектом система измерения расхода флюида содержит:
магистральный трубопровод с текущим флюидом;
первый вибрационный измеритель, включающий в себя первую сборку датчика, расположенную внутри магистрального трубопровода и сконфигурированную для определения одного или нескольких параметров потока, включая в себя первый расход;
второй вибрационный измеритель, включающий в себя вторую сборку датчика, расположенную внутри магистрального трубопровода и связанную флюидом с первой сборкой датчика, и сконфигурированную для определения одного или нескольких параметров потока, включая в себя второй расход;
системный контроллер, электрически связанный с первым и вторым вибрационными измерителями и сконфигурированный для:
приема первого и второго расходов;
определения дифференциального расхода на основании первого и второго расходов;
сравнения дифференциального расхода с пороговым значением или диапазоном значений; и
коррекции одного или нескольких параметров потока, если дифференциальный расход оказывается меньше, чем пороговое значение или диапазон значений.
Предпочтительно, коррекция содержит установку дифференциального расхода на нуль.
Предпочтительно, один первому или второму расходу определяется с использованием дифференциального смещения нуля.
Предпочтительно, системный контроллер дополнительно сконфигурирован для определения нового дифференциального смещения нуля, если дифференциальный расход оказывается меньше, чем пороговое значение.
Предпочтительно, системный контроллер дополнительно сконфигурирован для определения нового дифференциального смещения нуля, если дифференциальный расход оказывается меньше, чем пороговое значение для заданного интервала времени.
Предпочтительно, системный контроллер дополнительно сконфигурирован для применения групповой задержки к одному первому или второму расходу так, что первый и второй расходы отображают расходы, имеющие место по существу в одно и то же время.
В соответствии с другим объектом измерительная электроника для первой сборки датчика, расположенной внутри магистрального трубопровода и связанной флюидом со второй сборкой датчика вибрационного измерителя, электрически связанного с измерительной электроникой, сконфигурирована для:
приема сигналов датчика от первой сборки датчика и определения одного или нескольких параметров потока, включая в себя первый расход флюида;
приема второго расхода флюида от второго вибрационного измерителя;
определения дифференциального расхода на основании первого и второго расходов флюида;
сравнения дифференциального расхода с пороговым значением или диапазоном значений; и
коррекции одного или нескольких параметров потока, если дифференциальный расход оказывается меньше, чем пороговое значение или диапазон значений.
Предпочтительно, коррекция содержит установку дифференциального расхода на нуль.
Предпочтительно, измерительная электроника дополнительно сконфигурирована для определения первого расхода флюида, используя дифференциальное смещение нуля.
Предпочтительно, измерительная электроника дополнительно сконфигурирована для определения нового дифференциального смещения нуля, если дифференциальный расход оказывается меньше, чем пороговое значение или диапазон значений.
Предпочтительно, измерительная электроника дополнительно сконфигурирована для определения нового дифференциального смещения нуля, если дифференциальный расход оказывается меньше, чем пороговое значение или диапазон значений, для заданного интервала времени.
Предпочтительно, измерительная электроника дополнительно сконфигурирована для определения дифференциального расхода, используя групповую задержку, применяемую к первому расходу так, что первый и второй расходы отображают расходы, имеющие место по существу в одно и то же время.
В соответствии с другим объектом способ эксплуатации системы измерения расхода флюида, включающей в себя первый вибрационный измеритель и второй вибрационный измеритель, связанный флюидом с первым вибрационным измерителем, содержит этапы:
приема сигналов первого датчика от первого вибрационного измерителя и приема сигналов второго датчика от второго вибрационного измерителя;
определения одного или нескольких параметров потока, включая первый и второй расходы, на основании сигналов первого и второго датчиков;
определения дифференциального расхода на основании первого и второго расходов;
сравнения дифференциального расхода с пороговым значением или диапазоном значений; и
коррекции одного или нескольких параметров потока, если дифференциальный расход оказывается меньше, чем пороговое значение или диапазон значений.
Предпочтительно, коррекция содержит установку дифференциального расхода на нуль.
Предпочтительно, один первый или второй расходы определяются с использованием дифференциального смещения нуля.
Предпочтительно, способ дополнительно содержит этап определения нового дифференциального нулевого смещения, если дифференциальный расход оказывается меньше, чем пороговое значение или диапазон значений.
Предпочтительно, способ дополнительно содержит этап определения нового дифференциального нулевого смещения, если дифференциальный расход оказывается меньше, чем пороговое значение или диапазон значений, для заданного интервала времени.
Предпочтительно, этап определения дифференциального расхода содержит применение групповой задержки к одному первому или второму расходу так, что первый и второй расходы отображают расходы, имеющие место по существу в одно и то же время.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 изображает вибрационный измеритель в соответствии с вариантом реализации.
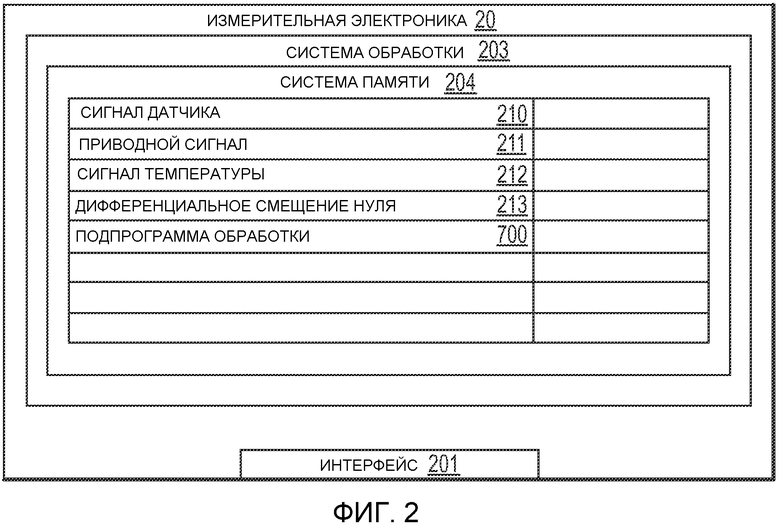
Фиг.2 - измерительная электроника для вибрационного измерителя в соответствии с вариантом реализации.
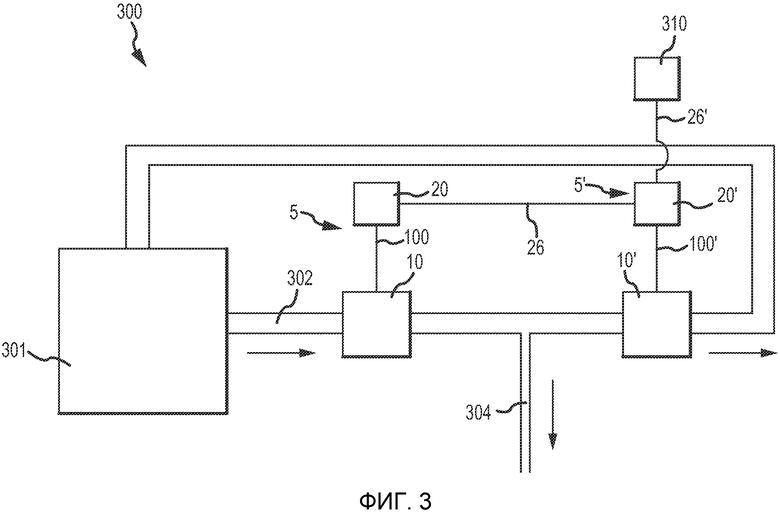
Фиг.3 - система с протекающим флюидом в соответствии с вариантом реализации.
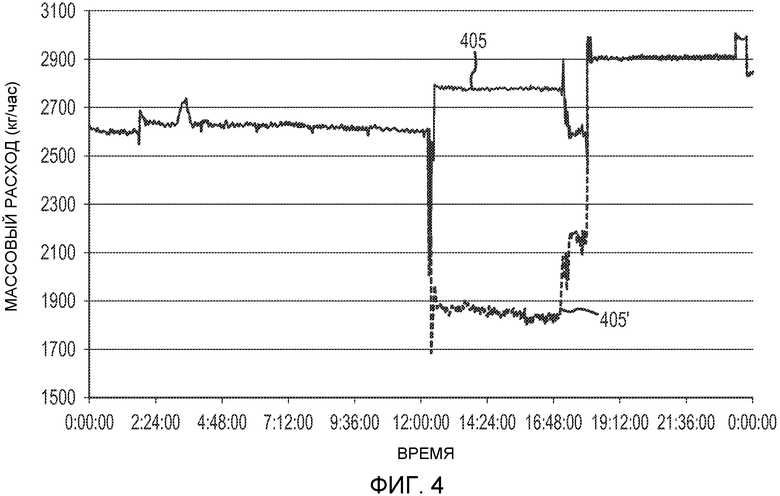
Фиг.4 - график зависимости массового расхода от времени.
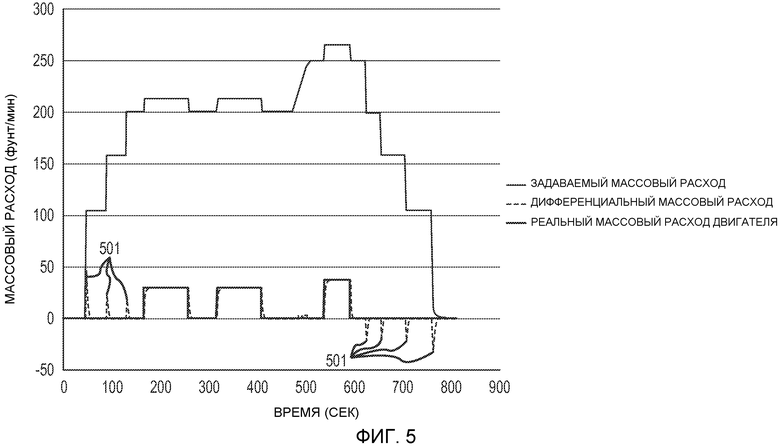
Фиг.5 - график зависимости массового расхода от времени при варьирующихся обеспечиваемых расходах.
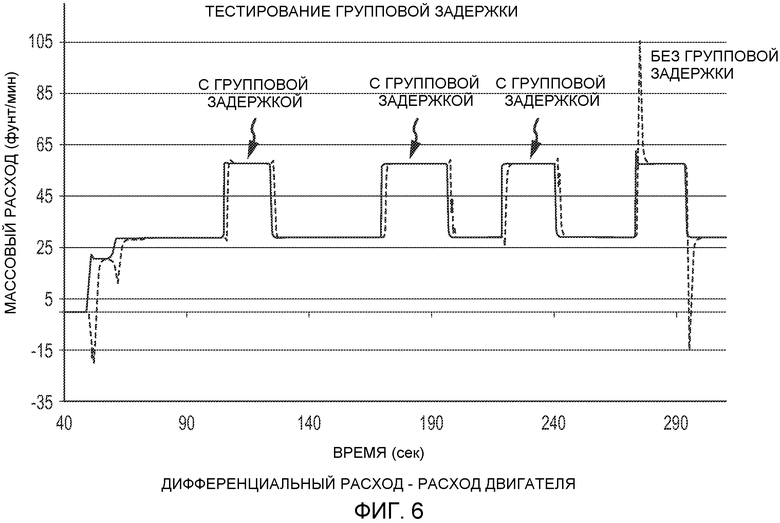
Фиг.6 - график дифференциального расхода и потребления двигателем с различными групповыми задержками.
Фиг.7 - подпрограмма обработки в соответствии с вариантом реализации.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Чертежи на Фиг.1-7 и нижеследующее описание демонстрируют конкретные примеры для пояснения специалистам в данной области техники того, как реализовать и использовать наилучший рабочий режим вариантов реализации системы вибрационного измерителя. С целью пояснения принципов изобретения некоторые обычные объекты были упрощены или исключены. Специалисты в данной области техники увидят возможные вариации этих примеров, которые находятся в пределах объема притязаний изобретения. Специалисты в данной области техники увидят, что описанные ниже признаки могут быть различным образом скомбинированы, образуя множественные вариации системы вибрационного измерителя. Таким образом, изобретение не ограничивается описанными ниже конкретными примерами, но только пунктами формулы и их эквивалентами.
На Фиг.1 показан пример вибрационного измерителя 5 в виде расходомера Кориолиса, содержащего сборку 10 датчика и одну или несколько измерительных электроник 20. Измерительная электроника 20 соединяется со сборкой 10 датчика с помощью соединительных кабелей 100 для измерения одного или нескольких параметров текущего материала, например, плотности, массового расхода, объемного расхода, суммарного массового расхода, температуры, и для получения другой информации.
Сборка 10 датчика включает в себя пару фланцев 101 и 101′, манифольды 102 и 102′ и расходомерные трубопроводы 103A и 103B. Манифольды 102, 102′ прикрепляются к противоположным концам трубопроводов 103A, 103B. Фланцы 101 и 101′ настоящего варианта реализации прикрепляются к манифольдам 102 и 102′. Манифольды 102, 102′ настоящего варианта реализации прикрепляются к противоположным концам разделителя (проставки) 106. Проставка 106 поддерживает определенное расстояние между манифольдами 102 и 102′, в данном варианте реализации - для предотвращения нежелательных колебаний в трубопроводах 103A и 103B. Трубопроводы вытянуты наружу от манифольдов по существу параллельно друг другу. Когда сборка 10 датчика вставляется в трубопроводную систему (см. Фиг.3), по которой транспортируется текучий материал, материал входит в сборку 10 датчика через фланец 101, проходит через впускной манифольд 102, где суммарное количество материала направляется в трубопроводы 103A и 103B, протекает через трубопроводы 103A и 103B, и назад, в выпускной манифольд 102′, где материал выходит из сборка 10 датчика через фланец 101′.
Сборка 10 датчика включает в себя привод 104. Привод 104 прикреплен к трубопроводам 103A, 103B в положении, где привод 104 может возбудить колебания трубопроводов 103A, 103B на приводной моде. Более конкретно, привод 104 включает в себя первую составляющую часть привода (не показана), прикрепленную к трубопроводу 103A, и вторую составляющую часть привода (не показана), прикрепленную к трубопроводу 103B. Привод 104 может содержать одну из многих известных конфигураций, например индукционную катушку, установленную на трубопроводе 103A, и противостоящий магнит, установленный на трубопроводе 103B.
В настоящем примере приводная мода представляет собой первую несинфазную изгибную моду, и трубопроводы 103A и 103B предпочтительно соответственно выбраны и смонтированы на впускном манифольде 102 и выпускном манифольде 102′ так, чтобы обеспечить сбалансированную систему, имеющую по существу то же самое массовое распределение, моменты инерции, и модули упругости относительно изгибных осей W-W и W′-W′, соответственно. В настоящем примере, где приводная мода представляет собой первую несинфазную изгибную моду, трубопроводы 103A и 103B приводятся в движение приводом 104 в противоположных направлениях относительно их соответствующих изгибных осей W-W и W′-W′. Приводной сигнал в виде переменного тока может быть предоставлен измерительной электроникой 20, например, по соединительному каналу 110, и пропущен через индукционную катушку для возбуждения колебаний обоих трубопроводов 103A, 103B. Специалистам в данной области техники должно быть ясно, что в пределах объема притязаний данного варианта реализации могут быть использованы и другие приводные моды.
Сборка 10 датчика включает в себя пару измерительных преобразователей 105, 105′, которые прикреплены к трубопроводам 103A, 103B. Более конкретно, первая составляющая часть измерительного преобразователя (не показана) расположена на трубопроводе 103A, и вторая составляющая часть измерительного преобразователя (не показана) расположена на трубопроводе 103B. В показанном варианте реализации измерительные преобразователи 105, 105′ могут быть электромагнитными детекторами, например тензометрическими магнитами и тензометрическими индукционными катушками, которые производят тензометрические сигналы, отображающие скорость перемещения и положение трубопроводов 103A, 103B. Например, измерительные преобразователи 105, 105′ могут подавать тензометрические сигналы на измерительную электронику 20 по каналам 111, 111′. Специалистам в данной области техники должно быть ясно, что перемещение трубопроводов 103A, 103B пропорционально некоторым параметрам потока материала, например массовому расходу, плотности материала, объемному расходу и т.п., текущего через трубопроводы 103A, 103B.
Следует отметить, что хотя сборка 10 датчика описана выше как содержащая двойную сборку датчика расходомерного трубопровода, в пределах объема притязаний настоящего варианта реализации вполне возможно осуществить единственную сборку датчика расходомерного трубопровода. Кроме того, хотя расходомерные трубопроводы 103A, 103B показаны как расходомерные трубопроводы, содержащие изогнутую конфигурацию, настоящий вариант реализации может быть осуществлен со сборкой датчика, содержащей расходомерный трубопровод прямой конфигурации. Поэтому описанный выше конкретный вариант реализации сборки 10 датчика представляет собой просто один пример и никоим образом не должен ограничивать объем притязаний настоящего варианта реализации.
В показанном на Фиг.1 варианте реализации измерительная электроника 20 принимает тензометрические сигналы от измерительных преобразователей 105, 105′. Канал 26 предоставляет входное и выходное средство, которое позволяет измерительной электронике 20 взаимодействовать с оператором или другой измерительной электроникой (см. Фиг.3). Измерительная электроника 20 измеряет один или несколько параметров системы, например разность фаз, частоту, временную задержку, плотность, массовый расход, объемный расход, суммарный массовый расход, температуру, верификацию измерителя, а также позволяет получать другую информацию. Более конкретно, измерительная электроника 20 может принимать один или несколько сигналов от измерительных преобразователей 105, 105′ и от одного или нескольких температурных датчиков (не показаны) и использует эту информацию для измерения различных параметров материала.
Сборка 10 датчика может дополнительно включать в себя датчик 107 температуры, например устройство с термометром сопротивления (RTD) для измерения температуры флюида внутри трубопроводов 103A, 103B. Устройство RTD может быть электрически связанным с измерительной электроникой 20 через соединительный кабель 112.
Методики, посредством которых вибрационные измерители, например расходомеры Кориолиса или денситометры, измеряют параметры потока, хорошо известны; поэтому их подробное рассмотрение опущено для краткости данного описания.
Как кратко рассмотрено выше, одна из проблем, связанная с вибрационными измерителями, такими как расходомеры Кориолиса, заключается в наличии нулевого смещения, которое является измеренной временной задержкой измерительных преобразователей 105, 105′ при нулевом потоке флюида. Если смещение нуля не учитывается при вычислении расхода и различных других параметров потока, то измеренные параметры потока будут обычно включать в себя ошибку измерения. Типичный подход техники предшествующего уровня при компенсации смещения нуля заключается в измерении начального смещения нуля (Δt0) во время процесса начальной калибровки, который обычно предполагает закрытие клапанов и обеспечение опорного состояния с нулевым потоком. Такие процессы калибровки являются общеизвестными в данной области техники, и их подробное обсуждение опущено для краткости описания. Как только начальное смещение нуля определено, во время эксплуатации системы, измерения расхода корректируются вычитанием начального смещения нуля из измеренной временной задержки в соответствии с уравнением (1)

где

FCF - коэффициент калибровки расхода;

Δt0 - начальное смещение нуля.
Следует отметить, что уравнение (1) предоставляется просто как пример и никоим образом не должно ограничивать объем притязаний настоящего варианта реализации. Хотя уравнение (1) предоставляется для вычисления массового расхода, следует отметить, что смещение нуля может влиять и на различные другие измерения потока и поэтому также может быть скорректировано.
Хотя этот подход может предоставить адекватные результаты в системе с единственной сборкой датчика, имеются некоторые ситуации, когда множественные сборки датчика вводятся последовательно. Например, как объяснено в вышеупомянутой Международной Публикации WO/2011/019344, в некоторых ситуациях оказывается более важным разность между двумя измеренными расходами, определяемыми двумя или несколькими сборками датчика (дифференциальный расход), чем абсолютный расход, определяемый какой-либо отдельной сборкой датчика. В таких ситуациях один вибрационный измеритель может содержать опорный измеритель с другим вибрационным измерителем, калибруемым для обеспечения по существу одинакового массового расхода, когда одинаковы потоки через два измерителя.
Поскольку два измерителя сконфигурированы для получения одинаковых измерений при одинаковых условиях, абсолютное смещение нуля измерителей не столь важно, как в системе с единственным измерителем. Поэтому в соответствии с вариантом реализации измерительная электроника 20 или больше чем одна измерительная электроника могут быть сконфигурированы для получения дифференциального смещения нуля между двумя или несколькими сборками датчика. Дифференциальное смещение нуля может содержать начальное смещение нуля сборки датчика, объединенное с дифференциальной ошибкой между двумя или несколькими сборками датчика. Дифференциальное смещение нуля может требоваться для получения по существу одинаковых расходов через калибруемый датчик и опорный датчик. Иначе говоря, обращаясь к вышеприведенному уравнению (1), если имеется один и тот же расход флюида, текущего через калибруемый датчик и опорный датчик, то эти два датчика могут создавать два массовых расхода, используя уравнение (1) для каждого датчика. Если предполагается, что массовый расход опорного датчика равен массовому расходу калибруемой сборки датчика, то дифференциальное смещение нуля калибруемого датчика может быть вычислено. Это новое смещение по существу представляет собой дифференциальное смещение и отображается в уравнениях (2) и (3)

где


Δt0c - начальное смещение нуля калибруемого датчика;
ΔtΕ - дифференциальная ошибка;
Δtc - измеренная временная задержка калибруемого датчика; и
FCFC - коэффициент калибровки расхода калибруемого датчика.
Уравнение (3) может быть дополнительно упрощено, объединяя смещение нуля калибруемого датчика и дифференциальную ошибку. В результате получается уравнение, которое определяет дифференциальное смещение нуля, как это видно из уравнения (4)
где
ΔtD - дифференциальное смещение нуля.
Поэтому, как объяснено в публикации 344, дифференциальное смещение нуля может отвечать разности измеренных параметров потока между двумя или несколькими сборками датчика, которые измеряют по существу один и тот же поток. Когда дифференциальное смещение нуля используется в калиброванном датчике, а не начальное нулевое смещение, при решении уравнения (1), дифференциальная измерительная характеристика пары датчиков может быть значительно улучшена. Дифференциальное смещение нуля может быть сохранено в измерительной электронике 20, например.
На Фиг.2 показана измерительная электроника 20 в соответствии с вариантом реализации. Измерительная электроника 20 может включать в себя интерфейс 201 и систему 203 обработки. Система 203 обработки может включать в себя систему 204 памяти. Система 204 памяти может содержать внутреннюю память, как это показано, или, альтернативно, может содержать внешнюю память. Измерительная электроника 20 может создавать приводной сигнал 211 и подавать приводной сигнал 211 на привод 104. Кроме того, измерительная электроника 20 может принимать сигналы 210 датчика от измерителя 10 расхода и/или сборки 10′ датчика, показанной ниже, например сигналы измерительных преобразователей. В некоторых вариантах реализации сигналы 210 датчика могут быть приняты от привода 104. Измерительная электроника 20 может работать как денситометр или может работать как массовый расходомер, включая в себя работу в качестве массового расходомера Кориолиса. Следует отметить, что измерительная электроника 20 может также работать как вибрационный измеритель некоторого другого типа, и предоставленные конкретные примеры не должны ограничивать объем притязаний настоящего варианта реализации. Измерительная электроника 20 может обработать сигналы 210 датчика для получения одного или нескольких параметров потока материала, текущего через трубопроводы 103A, 103B. Один или несколько параметров потока могут быть созданы, используя сохраняемое дифференциальное смещение 213 нуля. В некоторых вариантах реализации измерительная электроника 20 может принимать температурный сигнал 212 от одного или нескольких устройств с термометром сопротивления (RTD) или от других устройств измерения температуры, например.
Интерфейс 201 может принимать сигналы 210 датчика от привода 104 или от измерительных преобразователей 105, 105′ через кабельные соединения 110, 111, 111′. Интерфейс 201 может выполнить любое необходимое или желательное формирование сигнала, например какое-либо форматирование, усиление, буферизацию и т.д. Альтернативно, некоторые или все формирования сигнала могут быть выполнены в системе 203 обработки. Кроме того, интерфейс 201 может обеспечить обмен данных между измерительной электроникой 20 и внешними устройствами. Интерфейс 201 может быть пригоден для любого варианта обмена данных - электронного, оптического или беспроводного.
Интерфейс 201 в одном варианте реализации может включать в себя цифровой преобразователь (не показан), причем сигналы датчика содержат аналоговые сигналы датчика. Цифровой преобразователь может делать выборку и оцифровывать аналоговые сигналы датчика и производить цифровые сигналы датчика. Цифровой преобразователь также может выполнить любое необходимое прореживание сигнала, причем цифровой сигнал датчика прореживается для сокращения объема необходимой обработки сигналов и для сокращения продолжительности обработки.
Система 203 обработки может контролировать работу измерительной электроники 20 и обрабатывать измерения потока от расходомера 10. Система 203 обработки может выполнять одну или несколько подпрограмм обработки, например подпрограмму определения дифференциального смещения 213, и, тем самым, обрабатывать измерения потока для получения одного или нескольких параметров потока, которые скомпенсированы относительно дрейфа в смещении нуля датчика.
Система 203 обработки может содержать компьютер общего назначения, микропроцессорную систему, логическую схему или некоторое другое, универсальное или специальное, устройство обработки. Система 203 обработки может быть распределена среди множества устройств обработки. Система 203 обработки может включать в себя любой вариант интегральной среды или среды с независимым электронным сохранением данных, например систему 204 памяти.
Следует понимать, что измерительная электроника 20 может включать в себя различные другие компоненты и функции, которые являются общеизвестными в данной области техники. Эти дополнительные признаки опущены в описании и чертежах в целях краткости изложения. Поэтому настоящий вариант реализации не должен быть ограничен показываемой и обсуждаемой конкретной конфигурацией.
Хотя вышеупомянутый вибрационный измеритель может быть осуществлен как отдельная система вибрационного измерителя, имеется много приложений, которые используют множественные вибрационные измерители последовательно. Во многих из этих приложений не столь важен абсолютный расход, измеренный каждой отдельной сборкой датчика, а скорее важна разность между расходами, измеренными различными сборками датчика, то есть дифференциальный расход является главным параметром потока, представляющим интерес для пользователя или оператора. Два обычных примера такой ситуации соответствуют применению для измерений потребления топлива и для измерений при регистрации утечки топлива. Применение для измерений потребления топлива показано на Фиг.3; однако чертеж одинаково применим к другим ситуациям, например, для систем регистрации утечки топлива, когда множественные сборки датчика реализуются в последовательном размещении, и представляет интерес разность измерений по меньшей мере между двумя сборками датчика.
На Фиг.3 показана блок-схема системы 300 измерения расхода флюида в соответствии с вариантом реализации. Хотя система 300 измерения расхода флюида показана как типичная система измерения потребления топлива, следует отметить, что топливо представляет собой просто один примерный флюид, и система 300 измерения расхода флюида одинаково применима к другим флюидам. Поэтому использование топлива не должно ограничивать объем притязаний настоящего варианта реализации.
Система 300 измерения расхода флюида включает в себя блок 301 подачи топлива, магистральный трубопровод 302, первую сборку 10 датчика, установленную в магистральном трубопроводе 302, выпуск 304 топлива, и вторую сборку 10′ датчика, установленную в магистральном трубопроводе 302. Поэтому магистральный трубопровод 302 предоставляет канал, связывающий флюидом первую и вторую сборки 10, 10′ датчика. Вторая сборка 10′ датчика может содержать подобную же сборку датчика, что и первая сборка 10 датчика, как показано на Фиг.1. Обычно, двигатель, или другое потребляющее топливо устройство, устанавливаются между первой и второй сборками 10, 10′ датчика на выпуске 304 топлива; однако устройство не приведено на чертеже для упрощения чертежа.
Кроме того, на Фиг.3 показаны первый и второй измерительные электроники 20, 20′, электрически связанные с соответствующими сборками 10, 10′ датчика через кабельные соединения 100, 100′. Кроме того, первая измерительная электроника 20 электрически связана со второй измерительной электроникой 20′ через кабельное соединение 26. Поэтому вторая измерительная электроника 20′ может принимать сигналы датчика от обеих сборок 10, 10′ датчика. Альтернативно, первая измерительная электроника 20 может обрабатывать сигналы датчика от первой сборки 10 датчика и предоставлять измеренные параметры потока на вторую измерительную электронику 20′. Вторая измерительная электроника 20′ показана как электрически связанная с системным контроллером 310 через кабельное соединение 26′. Системный контроллер 310 может выводить информацию на хост-систему (не показана). Поэтому системный контроллер 310 может содержать централизованную систему обработки, универсальный компьютер или некоторого другого типа универсальное или специализированное устройство обработки, которое может обрабатывать сигналы, принятые от обоих измерительных электроник 20, 20′. Поэтому системный контроллер 310 может не содержать участок вибрационных измерителей 5, 5′, а вместо этого может быть сконфигурирован для обработки сигналов от вибрационных измерителей 5, 5′. Системный контроллер 310 может также быть электрически связанным с пользовательским интерфейсом (не показан). Это может позволить пользователю сконфигурировать системный контроллер 310 в соответствии с предпочтениями или требованиями пользователя.
В других вариантах реализации обе сборки 10, 10′ датчика могут быть непосредственно связаны с той же самой измерительной электроникой. Альтернативно, обе измерительные электроники 20, 20′ могут быть связаны с системным контроллером 310. В соответствии с вариантом реализации первый и второй вибрационные измерители 5, 5′ содержат расходомеры Кориолиса. Однако вибрационные измерители могут содержать другие типы вибрационных датчиков, которые не имеют измерительных возможностей расходомеров Кориолиса. Поэтому настоящий вариант реализации не должен быть ограничен расходомерами Кориолиса.
При использовании флюид, например топливо, может быть подан на первую сборку 10 датчика через магистральный трубопровод 302. Первый вибрационный датчик 5 может вычислить различные параметры потока, включая в себя первый расход флюида, как рассмотрено выше. Топливо затем выходит из первой сборки 10 датчика и течет к потребляющему топливо устройству и или к топливному выпуску 304 или ко второму вибрационному измерителю 5′. Если топливо вытягивается из топливного выпуска 304, например, если двигатель запущен и потребляет топливо, то только участок топлива, выходящий из первой сборки 10 датчика, будет течь ко второй сборке 10′ датчика, поскольку двигатель не сжигает все подаваемое топливо. Второй вибрационный измеритель 5′ может вычислить различные параметры потока, включая в себя второй расход флюида. Если двигатель запущен и потребляет топливо, первый и второй расходы, измеренные первым и вторым вибрационными измерителями 5, 5′, будут различаться, приводя к дифференциальному расходу, как это определяется уравнением (5)
где



Хотя уравнение (5) предоставлено как выражение массового расхода, специалисты в данной области техники легко увидят, как подобное же уравнение может быть получено и для объемного расхода. Дифференциальный расход фактически равен количеству топлива, потребляемому двигателем, и, таким образом, в отношении потребления топлива, является представляющим интерес расходом.
Неиспользованное топливо течет через вторую сборку 10′ датчика и может возвратиться к блоку 301 подачи топлива, как это показано. Следует отметить, что хотя система 300 измерения расхода флюида демонстрирует только один топливный выпуск 304 и два вибрационных измерителя 5, 5′, в некоторых вариантах реализации могут быть множественные топливные выпуски и поэтому больше чем два вибрационных измерителя.
Как рассматривается в заявке 344, расход топлива, выходящего из топливного выпуска 304, (потребление флюида) обычно намного меньше, чем расход в трубопроводах 302, 306 подачи и возврата, приводя к сборкам 10, 10′ датчика с завышенными размерами. Можно легко заметить, что даже малый дрейф в смещении нуля каждого отдельного измерителя может неблагоприятно повлиять на всю систему. Однако поскольку разность этих двух расходов представляет собой представляющее интерес значение, абсолютное смещение нуля отдельных вибрационных измерителей 5, 5′ не является необходимым для коррекции измерения. Вместо этого может быть использовано изначально откалиброванное смещение нуля первого вибрационного измерителя 5 и дифференциальное смещение нуля, как определено выше и более подробно рассмотрено в заявке 344, может быть вычислено для второго вибрационного измерителя 5′. Хотя второй вибрационный измеритель 5′ показан ниже по течению относительно первого вибрационного измерителя 5, этот порядок мог быть изменен на обратный, сохраняя пределы объема притязаний настоящего варианта реализации. В качестве примера второй вибрационный измеритель 5′ может быть сделан опорным относительно первого вибрационного измерителя 5. Однако не важно - какой именно конкретный измеритель используется в качестве опорного измерителя. Поэтому в вариантах реализации, где смещение нуля содержит дифференциальное смещение нуля, один из вибрационных измерителей можно считать опорным измерителем с нулевым смещением другого вибрационного измерителя, откалиброванного для согласования с опорным измерителем. Поэтому дифференциальное смещение нуля может быть вычислено, используя вышеприведенное уравнение (4).
Хотя использование дифференциального смещения нуля дало усовершенствования дифференциальных измерений потока, иногда все же могут иметься малые различия, которые могут возникать между операциями обнуления, когда два измерителя измеряют один и тот же поток. Хотя различия часто оказываются малыми, разность может быть существенной при суммировании в течение длительного времени. Например, если двигатель выключается на длительные промежутки времени, в то время как топливо все еще течет через систему, суммарный дифференциальный расход между этими двумя расходами от первого и второго измерителя 5, 5′ может накопиться до значительной ошибки. При такой ситуации, если второй вибрационный измеритель 5′ измеряет расход, который оказывается меньше, чем расход, измеряемый первым вибрационным измерителем 5, пользователь или оператор может предположить, что в системе имеется утечка. И наоборот, если второй вибрационный измеритель 5′ измеряет расход, который больше, чем расход, измеряемый первым вибрационным измерителем 5, система по существу сигнализирует, что двигатель производит топливо, что, очевидно, не может быть истинным.
На Фиг.4 показан график примера измерений расхода, взятых от первого и второго вибрационных измерителей 5, 5′. Между нулем времени и приблизительно 12:00 расход через систему 300 измерения расхода флюида составляет приблизительно 2600 кг/час. Однако приблизительно в 12:00 двигатель включается и топливо начинает потребляться, выходя из топливного выпуска 304. Следовательно, подаваемое топливо несколько увеличивается, приблизительно до 2750 кг/час, гарантируя, что адекватное количество топлива подается на двигатель, которое измеряется первым вибрационным измерителем 5 и показано на линии 405 на Фиг.4. Второй вибрационный измеритель 5′, вместе с тем, измеряет массовый расход приблизительно в 1850 кг/час, как показано линией 405′. Поэтому измерительная электроника 20′ или системный контроллер 310 может определить, что разность в расходах, измеренных первым и вторым вибрационными измерителями 5, 5′, то есть дифференциальный расход между первым и вторым вибрационными измерителями 5, 5′, составляет приблизительно 900 кг/час. Как отмечено выше, этот дифференциальный расход представляет собой важное значение в применениях для определения потребления топлива.
На Фиг.4 также показано, что двигатель выключен приблизительно в 18:00, когда массовые расходы, измеренные первым и вторым вибрационными измерителями 5, 5′, являются по существу равными. В соответствии с вариантом реализации измерительная электроника 20′ может гарантировать, что дифференциальные расходы, измеренные в то время, когда двигатель выключен и, таким образом, не потребляет топливо, будут скорректированы. В соответствии с вариантом реализации измерительная электроника 20′, например, может сравнить определяемый дифференциальный расход с пороговым значением или диапазоном значений. Если определяемый дифференциальный расход оказывается меньше, чем пороговое значение или диапазон значений, системный контроллер 310 или измерительная электроника 20′ может скорректировать один или несколько параметров потока системы 300 измерения расхода флюида.
В соответствии с вариантом реализации коррекция может содержать определение того, что дифференциальный расход является нулевым. В соответствии с вариантом реализации дифференциальный расход может быть установлен на нуль, устанавливая второй расход, определяемый вторым вибрационным измерителем 5′, как равный первому расходу, определенному первым вибрационным измерителем 5. Иначе говоря, измерительная электроника 20′ или системный контроллер 310 может вывести дифференциальный расход как нулевой даже при том, что расходы, определенные первым и вторым вибрационным измерителями 5, 5′, не равны. Это подобно малому значению отсечки потока, как известно для систем с единственным измерителем техники предшествующего уровня. Однако малое значение отсечки потока не может быть использовано в некоторых вариантах реализации системы 300 измерения расхода флюида, поскольку каждый вибрационный измеритель 5, 5′ все же имеет существенный поток флюида через сборки 10, 10′ датчика. Поэтому вместо использования малой отсечки потока дифференциальный расход может быть сравнен с пороговым значением или диапазоном значений (пределами изменения значений). Пороговое значение или диапазон значений может содержать дифференциальный расход, ниже которого определяемый дифференциальный расход связывается с ошибкой, а не с фактическим дифференциальным потоком. Конкретные значения, используемые для порогового значения или диапазона значений, вообще говоря, зависят от конкретных особенностей системы 300 измерения расхода флюида, например от того, какое типичное значение дифференциального расхода содержится в течение нормального использования. Предпочтительно, пороговое значение или диапазон значений должны быть достаточно удалены от типичного дифференциального расхода, чтобы пороговые расходы, определяемые, когда двигатель потребляет топливо, не были ниже порогового значения или диапазона значений.
В соответствии с другим вариантом реализации коррекция, предварительно выполненная после определения того, что дифференциальный расход оказывается ниже порогового значения или диапазона значений, может содержать установку дифференциального расхода на нуль посредством определения нового дифференциального смещения нуля. Например, если дифференциальный расход оказывается ниже порогового значения или диапазона значений, определяемый дифференциальный расход может быть связан с изменением дифференциального смещения нуля, как определено выше. Следовательно, измерительная электроника 20′, например, может предположить, что расход через вибрационные измерители 5, 5′ является по существу одинаковым, когда дифференциальный расход оказывается ниже порогового значения или диапазона значений, и может быть определено новое дифференциальное смещение нуля. В соответствии с вариантом реализации новое дифференциальное смещение нуля может быть определено в любой момент, когда дифференциальный расход оказывается ниже порогового значения или диапазона значений. Альтернативно, новое дифференциальное смещение нуля может быть определено в любой момент, когда дифференциальный расход оказывается ниже порогового значения или диапазона значений, для заданного интервала времени. Новое дифференциальное смещение нуля может быть определено, когда дифференциальный расход оказывается ниже порогового значения или диапазона значений, для заданного интервала времени и когда расход через первый и второй вибрационные измерители 5, 5′ является по существу постоянным. Это может препятствовать определению нового дифференциального смещения нуля во время флуктуирующего потока. В другом альтернативном варианте реализации новое смещение нуля может быть определено, если пользователь инициирует новую обнуляющую подпрограмму, в то время как дифференциальный расход оказывается ниже порогового значения или диапазона значений.
В соответствии с другим вариантом реализации коррекция одного или нескольких параметров потока после определения того, что дифференциальный расход оказывается меньше, чем пороговое значение или диапазон значений, может содержать коррекцию параметра потока, отличного от расхода. Например, если дифференциальный расход оказывается меньше, чем пороговое значение или диапазон значений, то по существу тот же самый флюид течет через обе сборки 10, 10′ датчика. Поэтому параметры потока, например плотность, вязкость, объемный расход и т.д., должны быть по существу одинаковыми, предполагая при этом по существу постоянные температуры. Поэтому с дифференциальным расходом ниже порогового значения или диапазона значений различные параметры потока, определенные первым и вторым вибрационными измерителями 5, 5′, могут быть сравнены друг с другом, чтобы гарантировать, что определенные параметры по существу одинаковы. Если они не равны друг другу или находятся в пределах порогового предела друг относительно друга, то измерительная электроника 20, 20′ или системный контроллер 310 может повторно откалибровать один или оба вибрационных измерителя 5, 5′ так, что два вибрационных измерителя вычисляют по существу одинаковые значения для различных параметров потока. Альтернативно, коррекция может содержать сообщение об ошибке, если различные параметры потока по существу не согласуются между собой в пределах порогового предела, когда дифференциальный расход оказывается меньше, чем пороговое значение или диапазон значений. Специалистам в данной области техники должно быть ясно, что температура может значительно изменяться в двигателе или в другом потребляющем флюид устройстве. Поэтому плотность и/или вязкость текущего через первый и второй вибрационные измерители 5, 5′ флюида может различаться, даже когда расход по существу тот же самый вследствие вариаций температуры флюида. Поэтому если температура флюида внутри первого и второго вибрационных измерителей 5, 5′ различается, то может потребоваться соответствующая коррекция. Например, если расходы измеряются как массовые расходы, объемный расход может быть получен преобразованием с использованием плотности при стандартной температуре.
В дополнение к изменению дифференциального смещения нуля, которое может возникнуть в течение длительного времени, между первым и вторым вибрационными измерителями 5, 5′, другая проблема, связанная с множественными измерительными системами, - это задержка, которая может возникнуть, когда сигналы передаются между двумя или несколькими вибрационными измерителями. Например, как показано на Фиг.3, первая измерительная электроника 20 электрически связана со второй измерительной электроникой 20′ через кабельное соединение 26. Хотя кабельное соединение 26 может содержать множество различных протоколов связи, один особенно популярный протокол связи, используемый в производстве расходомеров, - это протокол Hart®. Как это общеизвестно в данной области техники, протокол Hart® часто имеет задержку между моментом времени, когда сигнал посылается, и моментом времени, когда сигнал принимается, что может влиять на измерения.
В качестве примера в соответствии с вариантом реализации вторая измерительная электроника 20′ может принимать измерительные сигналы от первой измерительной электроники 20. Однако измерительные сигналы, принятые второй измерительной электроникой 20′, могут быть задержаны на заданный интервал времени относительно момента времени, когда сигналы датчика были изначально приняты первой измерительной электроникой 20 от сборки 10 датчика. Например, вторая измерительная электроника 20′ может принимать измерительные сигналы на основании сигналов датчика, взятых от сборки 10 датчика предварительно за 0,5 секунд. Задержка может произойти вследствие задержки обработки или задержки осуществления выборки. После приема измерительных сигналов вторая измерительная электроника 20′ может затем сравнить первый расход, полученный от первого вибрационного измерителя 5, со вторым расходом, определенным на основании сигналов датчика, принятых от второй сборки 10′ датчика, чтобы определить дифференциальный расход. Пока расход остается по существу постоянным в течение этого времени осуществления выборки, может быть определен допустимый дифференциальный расход. Однако если расход между временами осуществления выборки изменяется, сигналы датчика от второй сборки 10′ датчика будут сравниваться с неправильным расходом, принятым от первого вибрационного измерителя 5, то есть вторая измерительная электроника 20′ будет сравнивать измерения, полученные на основании двух различных расходов, взятых в разное время. Эта проблема проиллюстрирована на Фиг.5.
На Фиг.5 показан график массового потока в зависимости от времени. Как можно видеть, массовый поток, подаваемый от блока 301 подачи топлива, варьируется во времени. Кроме того, подаваемый на двигатель массовый поток варьируется, например, вследствие включения и выключения двигателя. Поскольку потребление топлива изменяется, измеренный дифференциальный расход, определяемый на основании первого и второго измеренных расходов от первого и второго вибрационных измерителей 5, 5′, также изменяется. Однако в дополнение к изменениям дифференциального расхода вследствие изменения в потреблении топлива график показывает различные кратковременные выбросы 501 на определенном дифференциальном расходе, поскольку варьируется подача топлива. Выбросы возникают без изменений скорости потребления топлива. Выбросы 501 в определенном дифференциальном расходе обусловлены задержкой обработки, которая возникает, когда подаваемый расход резко изменяется между интервалами времени осуществлением выборки. Это требует того, чтобы дифференциальный расход быть определен с использованием сигналов датчика, взятых в различное время. Для преодоления задержки обработки задержка может быть добавлена к сигналам датчика от второй сборки 10′ датчика. Так называемая "групповая задержка" может быть добавлена для лучшего согласования того времени, когда сигналы датчика были приняты от первой сборки 10 датчика, со временем, когда сигналы датчика были приняты от второй сборки 10′ датчика, даже при том, что измерительные сигналы приняты от первой измерительной электроники 20 в более поздний момент времени.
На Фиг.6 показан график массового расхода в зависимости от времени с различными групповыми задержками, примененными к сигналам датчика, принятым от второй сборки 10′ датчика. Потребление двигателем, определенное отдельным расходомером (не показан), сравнивается с дифференциальным расходом, определяемым на основании сигналов датчика, принятых от первой и второй сборок 10, 10′ датчика. Как показано с краю справа, когда групповая задержка не применяется к измерению, наблюдаются большие выбросы в определяемом дифференциальном расходе, когда потребление двигателем быстро увеличивается или уменьшается. И напротив, когда групповая задержка применяется к сигналам датчика от второй сборки 10′ датчика, выбросы значительно уменьшаются, тем самым, улучшая определяемый дифференциальный расход. Для протокола Hart® групповая задержка составляет приблизительно 650-700 мс; однако конкретная групповая задержка, применяемая к сигналам датчика, может варьироваться от одного применения к другому. Поэтому конкретные приведенные значения никоим образом не должны ограничивать объем притязаний настоящего варианта реализации.
Настоящий вариант реализации осуществляет применение групповой задержки к сигналам датчика, принятым от второй сборки 10′ датчика вследствие задержки обработки, вызванной передачей измерительных сигналов от первой измерительной электроники 20 на вторую измерительную электронику 20′. Групповая задержка аналогично может быть применена к сигналам датчика, принятым от первой сборки 10 датчика. Следует отметить, что конкретная требуемая групповая задержка может зависеть от конкретного используемого протокола связи. Кроме того, групповая задержка может также требоваться в вариантах реализации, где единственная измерительная электроника принимает сигналы датчика от обеих сборок 10, 10′ датчика. Кроме того, специалисты в данной области техники могут легко заметить, что групповая задержка может также требоваться в вариантах реализации, где измерительные сигналы передаются от первой и второй измерительных электроник 20, 20′ на системный контроллер 310 для дополнительной обработки; например, в вариантах реализации, где системный контроллер 310 выполняет вычисление дифференциального потока.
На Фиг.7 показана подпрограмма 700 обработки в соответствии с вариантом реализации. Подпрограмма 700 обработки может быть сохранена в одной из измерительных электроник 20 или 20′ и может быть ими выполнена, например. Альтернативно, подпрограмма 700 обработки может быть сохранена в системном контроллере 310 и выполнена им. Подпрограмма 700 обработки может быть использована для предотвращения того, чтобы ложные дифференциальные расходы были отмечены и учтены. Подпрограмма 700 обработки может также быть использована для обновления дифференциального смещения нуля калиброванного вибрационного датчика.
Подпрограмма обработки начинается на этапе 701, когда сигналы первого датчика принимаются от первой сборки 10 датчика и сигналы второго датчика принимаются от второй сборки 10′ датчика.
На этапе 702 первый и второй параметры потока определяются на основании первого и второго сигналов датчиков. В соответствии с вариантом реализации первый и второй параметры потока могут содержать первый и второй расходы. В соответствии с вариантом реализации или первый, или второй расход могут быть определены с использованием дифференциального смещения нуля, как рассмотрено выше. Первый и второй расходы могут содержать массовые расходы. Альтернативно, первый и второй расходы могут содержать объемные расходы.
На этапе 703 дифференциальный расход определяется на основании первого и второго параметров потока. В соответствии с вариантом реализации дифференциальный расход может быть определен с использованием групповой задержки, применяемой ко второму расходу так, что дифференциальный расход определяется с использованием первого и второго расходов, взятых по существу в одно и то же время.
На этапе 704 дифференциальный расход сравнивается с пороговым значением или с диапазоном значений. Пороговое значение или диапазон значений могут быть заданы изготовителем. Альтернативно, пороговое значение или диапазон значений могут быть выбраны пользователем, например. Если дифференциальный расход оказывается меньше, чем пороговое значение или диапазон значений, измерительная электроника 20′ может скорректировать один или несколько параметров потока первого или второго вибрационных измерителей 5, 5′ на этапе 705. Как рассмотрено выше, дифференциальный расход может упасть ниже порогового значения или диапазона значений, по различным причинам. В применении для измерения потребления топлива, обсуждаемом выше, дифференциальный расход может упасть ниже порогового значения или диапазона значений, после выключения двигателя.
Как рассмотрено выше, коррекция может содержать вывод нулевого дифференциального расхода. В соответствии с другим вариантом реализации коррекция может содержать вычисление нового дифференциального смещения нуля. Новое дифференциальное смещение нуля может быть вычислено так, чтобы создать по существу равные первый и второй расходы. Новое дифференциальное смещение нуля может затем использоваться для последующих измерений. Коррекция может также содержать вывод сообщения об ошибках или коррекции других параметров потока, например определенной плотности или температуры. Если дифференциальный расход не меньше, чем пороговое значение или диапазон значений, подпрограмма обработки может или возвратиться на этап 701, или завершиться.
Варианты реализации, описанные выше, предоставляют аппарат и способ для коррекции одного или нескольких параметров потока для системы измерения расхода флюида, в которой используются множественные вибрационные измерители. Варианты реализации предоставляют способ для предотвращения того, чтобы ложные дифференциальные расходы быть учтены и/или отмечены как фактический расход. Фактически, если дифференциальный расход, определенный двумя или несколькими вибрационными измерителями, оказывается ниже порогового значения или диапазона значений, дифференциальный расход может быть установлен на нуль. Дифференциальный расход может просто быть установлен на нуль и выведен, или новое дифференциальное смещение нуля может быть вычислено так, что первый и второй расходы равны, тем самым, эффективно устанавливая дифференциальный расход на нуль. Кроме того, описанные выше варианты реализации могут учесть задержку вследствие обработки сигналов или вследствие выборки сигнала, что может влиять на дифференциальный расход, если расход через систему изменяется.
Подробные описания вышеупомянутых вариантов реализации не являются исчерпывающими описаниями всех вариантов реализации, рассматриваемых авторами как находящиеся в пределах объема притязаний настоящего описания. Действительно, специалисты в данной области техники увидят, что некоторые элементы вышеописанных вариантов реализации могут по-разному быть объединены или устранены, образуя дополнительные варианты реализации, и такие дополнительные варианты реализации находятся в пределах объема притязаний и принципов настоящего описания. Специалистам в данной области техники также будет очевидно, что вышеописанные варианты реализации могут быть объединены полностью или частично, образуя дополнительные варианты реализации в пределах объема притязаний и принципов настоящего описания.
Таким образом, хотя конкретные варианты реализации и соответствующие примеры системы измерения расхода флюида описаны здесь в иллюстративных целях, различные эквивалентные модификации возможны в пределах объема притязаний настоящего описания, как это будет ясно специалистам в данной области техники. Предоставляемые здесь принципы могут быть применены к другим расходомерным системам, а не только к описанным выше и показанным на сопровождающих чертежах вариантам реализации. Соответственно, объем притязаний изобретения должен быть определен из нижеследующей формулы.
Изобретение относится к системе измерения расхода флюида (300). Система измерения расхода флюида (300) включает в себя магистральный трубопровод (302) с текущим флюидом. Система измерения расхода флюида (300) дополнительно включает в себя первый вибрационный измеритель (5), включающий в себя первую сборку (10) датчика, расположенную внутри магистрального трубопровода (302) и сконфигурированную для определения одного или нескольких параметров потока, включая в себя первый расход. Предоставляется второй вибрационный измеритель (5′), включающий в себя вторую сборку (10′) датчика, расположенную внутри магистрального трубопровода (302), которая связана флюидом с первой сборкой (10) датчика и сконфигурирована для определения одного или нескольких параметров потока, включая в себя второй расход. Особенностью системы измерения расхода флюида (300) является применение групповой задержки к одному первому или второму расходу так, что первый и второй расходы отображают расходы, имеющие место по существу в одно и то же время. Технический результат - улучшение дифференциальных измерений, получаемых от системы с множественными датчиками. 3 н. и 12 з.п. ф-лы, 7 ил.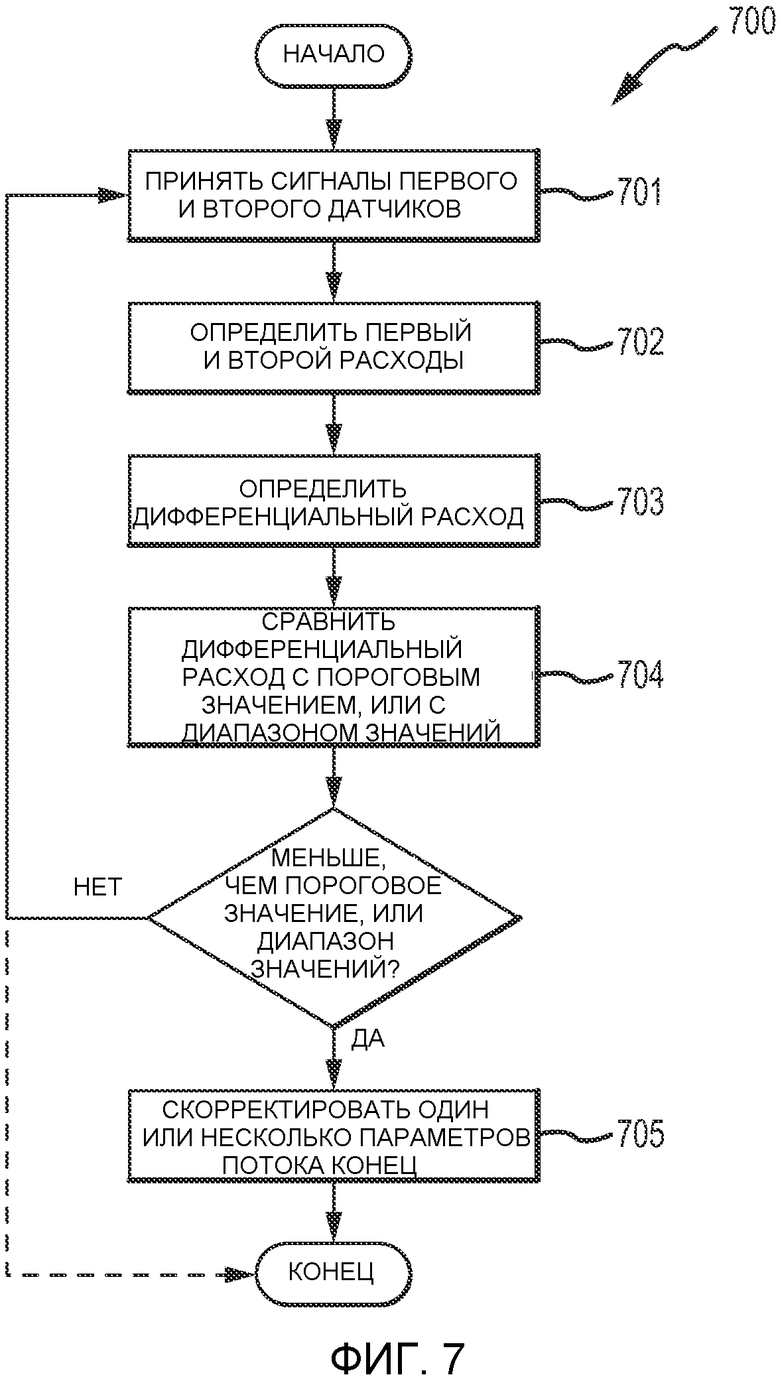
1. Система измерения расхода флюида (300) для флюида, содержащая:
магистральный трубопровод (302) с текущим флюидом;
первый вибрационный измеритель (5), включающий в себя первую сборку (10) датчика, расположенную внутри магистрального трубопровода (302) и сконфигурированную для определения одного или нескольких параметров потока, включая в себя первый расход;
второй вибрационный измеритель (5′), включающий в себя вторую сборку (10′) датчика, расположенную внутри магистрального трубопровода (302) и связанную флюидом с первой сборкой (10) датчика и сконфигурированную для определения одного или нескольких параметров потока, включая в себя второй расход;
системный контроллер (310), электрически связанный с первым и вторым вибрационными измерителями (5, 5′) и сконфигурированный для:
приема первого и второго расходов;
определения дифференциального расхода на основании первого и второго расходов;
сравнения дифференциального расхода с пороговым значением или диапазоном значений; и
коррекции одного или нескольких параметров потока, если дифференциальный расход оказывается меньше, чем пороговое значение или диапазон значений, и
применения групповой задержки к одному первому или второму расходу так, что первый и второй расходы отображают расходы, имеющие место по существу в одно и то же время.
2. Система измерения расхода флюида (300) для флюида по п. 1, причем коррекция содержит установку дифференциального расхода на нуль.
3. Система измерения расхода флюида (300) для флюида по п. 1, причем один из первого или второго расхода определяется с использованием дифференциального смещения нуля.
4. Система измерения расхода флюида (300) для флюида по п. 3, причем системный контроллер (310) дополнительно сконфигурирован для определения нового дифференциального смещения нуля, если дифференциальный расход оказывается меньше, чем пороговое значение.
5. Система измерения расхода флюида (300) для флюида по п. 3, причем системный контроллер (310) дополнительно сконфигурирован для определения нового дифференциального смещения нуля, если дифференциальный расход оказывается меньше, чем пороговое значение для заданного интервала времени.
6. Измерительная электроника (20′) для первой сборки (10′) датчика, расположенной внутри магистрального трубопровода (302) и связанной флюидом со второй сборкой (10) датчика вибрационного измерителя (5), электрически связанного с измерительной электроникой (20′), сконфигурированная для:
приема сигналов датчика от первой сборки (10′) датчика и определения одного или нескольких параметров потока, включая в себя первый расход флюида;
приема второго расхода флюида от второго вибрационного измерителя (5);
определения дифференциального расхода на основании первого и второго расходов флюида;
сравнения дифференциального расхода с пороговым значением или диапазоном значений; и
коррекции одного или нескольких параметров потока, если дифференциальный расход оказывается меньше, чем пороговое значение или диапазон значений; и
определения дифференциального расхода, используя групповую задержку, примененную к первому расходу так, что первый и второй расходы отображают расходы, имеющие место по существу в одно и то же время.
7. Измерительная электроника (20′) по п. 6, причем коррекция содержит установку дифференциального расхода на нуль.
8. Измерительная электроника (20′) по п. 6, дополнительно сконфигурированная для определения первого расхода флюида, используя дифференциальное смещение нуля.
9. Измерительная электроника (20′) по п. 8, дополнительно сконфигурированная для определения нового дифференциального смещения нуля, если дифференциальный расход оказывается меньше, чем пороговое значение или диапазон значений.
10. Измерительная электроника (20′) по п. 8, дополнительно сконфигурированная для определения нового дифференциального смещения нуля, если дифференциальный расход оказывается меньше, чем пороговое значение или диапазон значений, для заданного интервала времени.
11. Способ эксплуатации системы измерения расхода флюида, включающей в себя первый вибрационный измеритель и второй вибрационный измеритель, связанный флюидом с первым вибрационным измерителем, содержащий этапы:
приема сигналов первого датчика от первого вибрационного измерителя и приема сигналов второго датчика от второго вибрационного измерителя;
определения одного или нескольких параметров потока, включая в себя первый и второй расходы, на основании сигналов первого и второго датчиков;
определения дифференциального расхода на основании первого и второго расходов посредством определения дифференциального расхода, используя групповую задержку, примененную к первому расходу так, что первый и второй расходы отображают расходы, имеющие место по существу в одно и то же время;
сравнения дифференциального расхода с пороговым значением или диапазоном значений; и
коррекции одного или нескольких параметров потока, если дифференциальный расход оказывается меньше, чем пороговое значение или диапазон значений.
12. Способ по п. 11, причем коррекция содержит установку дифференциального расхода на нуль.
13. Способ по п. 11, причем один первый или второй расход определяется с использованием дифференциального смещения нуля.
14. Способ по п. 13, дополнительно содержащий этап определения нового дифференциального нулевого смещения, если дифференциальный расход оказывается меньше, чем пороговое значение или диапазон значений.
15. Способ по п. 13, дополнительно содержащий этап определения нового дифференциального нулевого смещения, если дифференциальный расход оказывается меньше, чем пороговое значение или диапазон значений, для заданного интервала времени.
| WO 2011019344 A2, 17.02.2011 | |||
| WO 2011019345 A2, 17.02.2011 | |||
| US 2005119845 A1, 02.06.2005 | |||
| US 2004200259 A1, 14.10.2004. |

