Изобретение относится к вращающимся (роторным) и к планирующим парашютам. Известны вращающиеся парашюты однослойной и двухслойной надувной конструкции, см., например, пат. №№2382322 и 2028255 (прототип), имеющие вытянутую или звездообразную в плане форму, лучи (далее «лопасти») которых расположены под углом атаки к набегающему потоку. Однако они имеют один недостаток - они нейтральные. То есть они в неподвижном воздухе могут опускаться только вертикально. Это не всегда удобно и безопасно. Например, парашют может опускаться на линию высоковольтных передач, на лес, на воду и другие неудобья. Желательно было бы иметь возможность при необходимости управлять спуском парашюта.
Задача и технический результат изобретения - повышение безопасности парашютного спуска путем превращения (трансформации) вращающегося парашюта в планирующий.
ВАРИАНТ 1. Для этого парашют состоит из двух или более лопастей, расположенных под углом атаки к поступающему снизу потоку, соединенных с грузом стропами и соединенных между собой одним или, в случае трех и более лопастного парашюта, несколькими постоянными гибкими креплениями и одним управляемым размыкаемым креплением.
Суть изобретения состоит в том, что при замкнутом управляемом креплении двух или более лопастей парашют представляет собой нейтральный роторный парашют, а при размыкании управляемого крепления все лопасти перестраиваются в одном направлении, располагаясь друг за другом, и парашют из нейтрального превращается в планирующий.
Лопастей может быть две, три или четыре. Работоспособность парашюта с числом лопастей более четырех представляется сомнительной.
Для того чтобы получившийся роторный парашют мог осуществлять прямолинейный полет, желательно, чтобы он был симметричный. Для этого надо, чтобы каждая лопасть была симметрична относительно своей середины, а длины ее строп, расположенных симметрично относительно середины, были попарно равны. В этом случае получившийся планирующий парашют будет состоять из двух или более расположенных друг за другом симметричных планирующих поверхностей (бывших лопастей) и сможет двигаться прямолинейно и при этом управляться.
Для того чтобы получившийся роторный парашют мог управляться по направлению, одна или все лопасти должны иметь по краям управляющие клапаны. Так как синхронное управление тремя или четырьмя лопастями представляется затруднительным, то достаточно, если управляющие клапаны будут только на одной лопасти.
Чтобы в планирующем положении парашюта его лопасти не имели тенденции к наползанию друг на друга, или друг под друга, желательно, чтобы в планирующем положении парашюта каждая задняя лопасть была длиннее впередирасположенной (длиной лопасти называется ее размер в радиальном направлении в положении роторного парашюта, или просто ее наибольший размер). Ненамного - на 3-4%. Это не приведет к заметному дисбалансу подъемной силы лопастей, но сделает взаимное расположение лопастей в планирующем положении более стабильным.
Не исключен также вариант, когда каждая задняя лопасть будет расположена выше или ниже впередирасположенной. Тоже ненамного.
Переход лопастей из роторного положения в планирующее, в основном, осуществляется с помощью управляющих клапанов. Но для более надежного выполнения этого процесса, а также для уверенной фиксации этого положения, парашют может иметь фал, проходящий через кольцо на конце одной лопасти - на передней или задней ее стороне относительно направления вращения парашюта в его роторном положении, и присоединенный к расположенному на конце другой (других) лопасти - на соответственно задней или передней стороне относительно направления вращения парашюта в его роторном положении.
При наличии трех или четырех лопастей промежуточная (промежуточные) между первой и последней лопастями в роторном положении парашюта имеют два кольца - на передней и на задней ее стороне относительно направления вращения парашюта в его роторном положении.
Упомянутым управляемым размыкаемым креплением может быть система из двух коушей, расположенных на разных лопастях, соединенных штифтом, имеющим пружинный замок, или система из двух коушей, расположенных на одной лопасти, и третьего коуша, расположенного между ними на другой лопасти, также соединенных штифтом, имеющим пружинный замок, причем штифт имеет управляющий фал, выдергивающий штифт при необходимости разъединения лопастей.
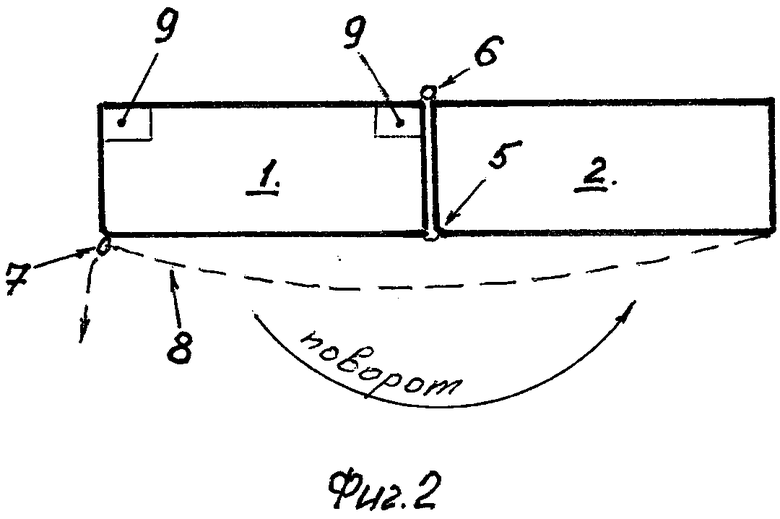
ПРИМЕР 1. На фиг. 1, 2 в виде спереди и сверху изображен данный парашют в роторном положении. Он состоит из двух куполов-лопастей 1 и 2, соединенных стропами 3 с грузом 4. Лопасти симметричны относительно своей середины и имеют полуэллипсовидную в виде сбоку форму. Лопасти соединены гибким креплением 5 и управляемым размыкаемым креплением 6. На переднем (по ходу вращения) конце лопасти 1 имеется кольцо 7, через которое проходит фал 8, соединенный с задним концом лопасти 2. На лопасти 1 имеются два управляющих клапана 9.
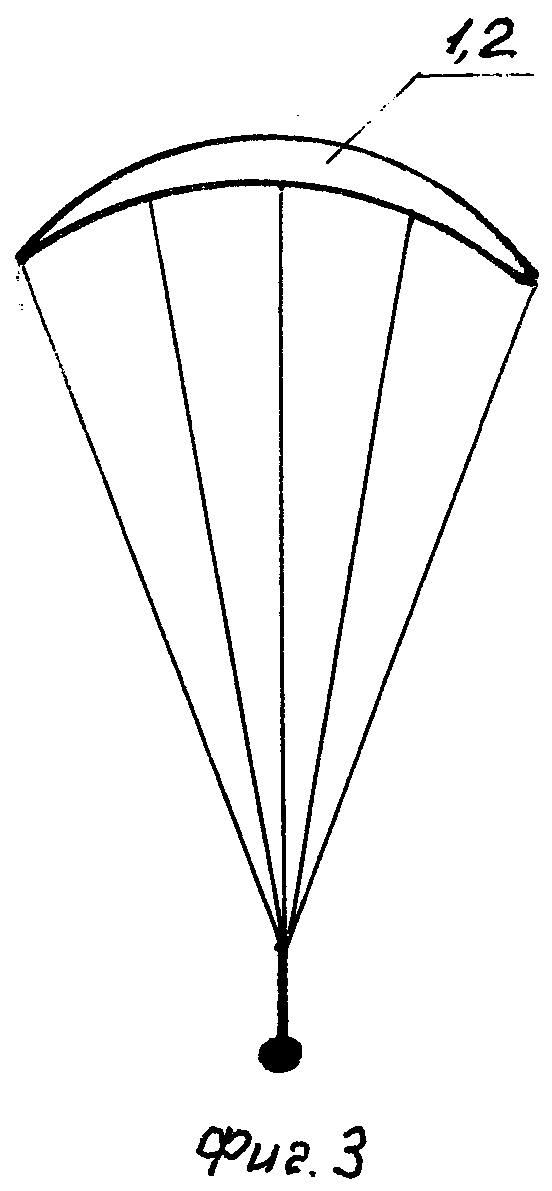
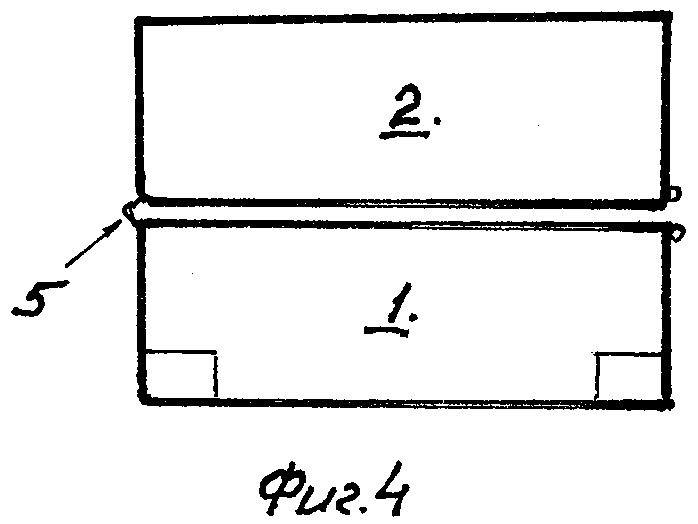
На фиг. 3, 4 изображен данный парашют в планирующем положении, когда лопасти 1 и 2 располагаются тандемно друг за другом.
Работает данный парашют так. После раскрытия он приобретает форму роторного парашюта и опускается нейтрально с вращением лопастей. При необходимости изменить место предполагаемого приземления парашют человеком или устройством дистанционного управления может быть переведен в планирующий режим. Для этого управляемое крепление 6 размыкается, управляющими клапанами 9 на лопасти 1 ее переводят в режим ускоренного вращения, она осуществляет поворот, показанный дугообразной стрелкой, и догоняет лопасть 2. Для ускорения этого процесса и для фиксации нового положения при этом может осуществляться выбирание фала 8, который дополнительно стягивает обе лопасти в последовательное положение и удерживает их в этом положении.
После трансформации в планирующее положение, изображенное на фиг. 3, 4, данный парашют может осуществлять управляемый спуск с поступательным движением, управляясь при этом по направлению клапанами 9.
ВАРИАНТ 2. Однако можно увеличить аэродинамическое качество получившегося планирующего парашюта. Этот вариант пригоден только для двухлопастного роторного парашюта. Если две лопасти в процессе роторного спуска перестроить так, чтобы они встали не одна за другой, а рядом, но планировали в одном направлении, то аэродинамическое удлинение получившегося парашюта-крыла получится больше, чем в первом варианте, и аэродинамическое качество также будет больше. Этот способ требует повышенной площади управляющих клапанов, причем желательно - на обеих лопастях, и повышенного мастерства оператора, управляющего перестройкой лопастей.
Для этого этот парашют состоит из двух лопастей, расположенных под углом атаки к поступающему снизу потоку, соединенных с грузом стропами и соединенных между собой двумя управляемыми размыкаемыми креплениями.
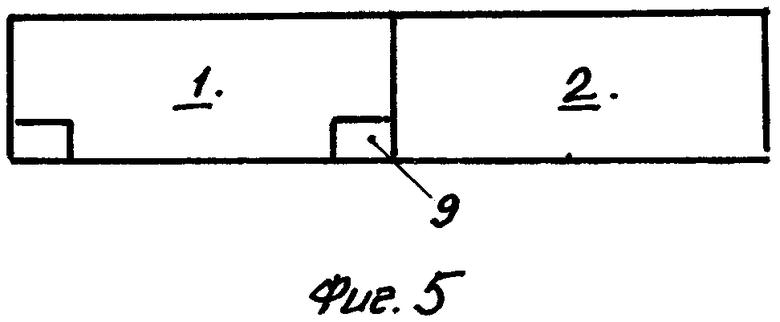
ПРИМЕР 2. На фиг. 5 изображен вид второго варианта прашюта-трансформера в положении «планирующий». Его вид сверху в роторном положении на фиг. 2 отличается от первого варианта только тем, что оба крепления 5 и 6 размыкаемые. Его вид сбоку в любом состоянии (роторном или планирующем) аналогичен фиг. 1.
Работает этот вариант парашюта следующим образом. В роторном режиме полета крепления 5 и 6 размыкаются, и лопасти разделяются. Лопасти 1 с помощью управляющих клапанов 9 дается команда повернуться на 90 градусов и остаться на своем месте. Или возможен несколько более сложный вариант, когда лопасть 1 управляется так, чтобы она облетела лопасть 2, примерно как показано на фиг. 2 стрелкой «поворот», и встала с правой ее стороны. В любом случае обе лопасти будут планировать в одном направлении, то есть парашют трансформируется из роторного в планирующий.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВРАЩАЮЩИЙСЯ ПАРАШЮТ С ДВУХСТАДИЙНЫМ ТОРМОЖЕНИЕМ | 2014 |
|
RU2569991C1 |
| ДВУХПОЗИЦИОННЫЙ ЭЛЕКТРО-ТЕРМО-МЕХАНИЧЕСКИЙ ЗАМКОВЫЙ КАРАБИН ДЛЯ ПАРАШЮТОВ С РЕГУЛИРУЕМЫМ СОПРОТИВЛЕНИЕМ СПУСКА | 2016 |
|
RU2634890C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВРАЩАЮЩИМСЯ ПАРАШЮТОМ | 2013 |
|
RU2526113C1 |
| СИСТЕМА ПАРАШЮТИРОВАНИЯ - 4 И СПОСОБ ЕЁ РАБОТЫ | 2014 |
|
RU2576852C1 |
| СИСТЕМА ПАРАШЮТИРОВАНИЯ И СПОСОБ ЕЁ РАБОТЫ | 2013 |
|
RU2527633C1 |
| Быстродействующая парашютная система спасения летательного аппарата | 2023 |
|
RU2807767C1 |
| Разъединительный карабин (варианты) | 2015 |
|
RU2611332C1 |
| СИСТЕМА СПАСЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1990 |
|
RU2018466C1 |
| Разъединительный карабин - 3 | 2018 |
|
RU2679877C1 |
| ПЛАНИРУЮЩИЙ ПАРАШЮТ | 1996 |
|
RU2094324C1 |
Парашют состоит из двух лопастей, расположенных под углом атаки к поступающему снизу потоку, соединенных с грузом стропами, соединенных между собой постоянными гибкими креплениями и одним управляемым размыкаемым креплением. Каждая лопасть симметрична относительно своей середины, а длины ее строп, расположенных симметрично относительно середины, попарно равны. После раскрытия парашют опускается нейтрально с вращением лопастей. Парашют может быть переведен в планирующий режим размыканием управляемого крепления. В другом варианте выполнения парашют имеет два размыкаемых крепления. Группа изобретений направлена на повышение безопасности спуска. 2 н. и 7 з.п. ф-лы, 5 ил.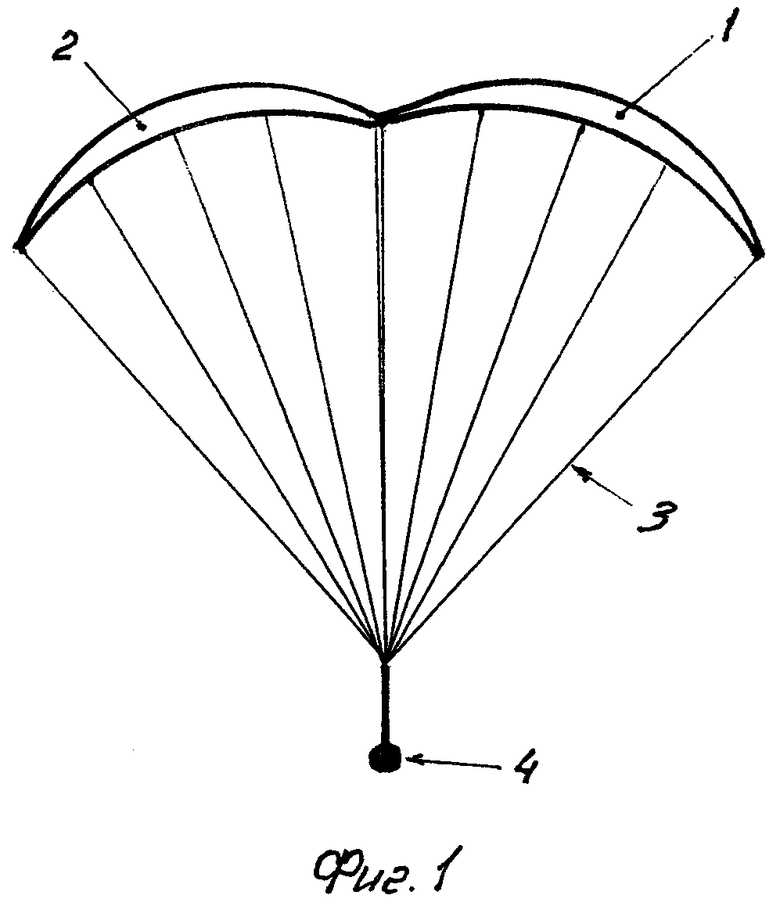
1. Парашют-трансформер, состоящий из тканевой или пленочной оболочки и строп, отличающийся тем, что парашют состоит из двух или более лопастей, расположенных под углом атаки к поступающему снизу потоку, соединенных с грузом стропами, и соединенных между собой одним или, в случае трех и более лопастного парашюта, несколькими постоянными гибкими креплениями и одним управляемым размыкаемым креплением.
2. Парашют по п. 1, отличающийся тем, что каждая лопасть симметрична относительно своей середины, а длины ее строп, расположенных симметрично относительно середины, попарно равны.
3. Парашют по п. 1, отличающийся тем, что одна или все лопасти должны иметь по краям управляющие клапаны.
4. Парашют по п. 1, отличающийся тем, что в планирующем положении парашюта каждая задняя лопасть длиннее впередирасположенной.
5. Парашют по п. 1, отличающийся тем, что каждая задняя лопасть будет расположена выше или ниже впередирасположенной.
6. Парашют по п. 1, отличающийся тем, что имеет фал, проходящий через кольцо на конце одной лопасти - на передней или задней ее стороне относительно направления вращения парашюта в его роторном положении, и присоединенный к расположенному на конце другой (других) лопасти (лопастей) - на соответственно задней или передней стороне относительно направления вращения парашюта в его роторном положении.
7. Парашют по п. 7, отличающийся тем, что при числе лопастей более двух промежуточная (промежуточные) между первой и последней лопастями в роторном положении парашюта имеет (имеют) два кольца - на передней и на задней ее стороне относительно направления вращения парашюта в его роторном положении.
8. Парашют по п. 1, отличающийся тем, что управляемым размыкаемым креплением является система из двух коушей, расположенных на разных лопастях, соединенных штифтом, имеющим пружинный замок, или система из двух коушей, расположенных на одной лопасти, и третьего коуша, расположенного между ними на другой лопасти, также соединенных штифтом, имеющим пружинный замок, причем штифт имеет управляющий фал, выдергивающий штифт при необходимости разъединения лопастей.
9. Парашют-трансформер, состоящий из тканевой или пленочной оболочки и строп, отличающийся тем, что парашют состоит из двух лопастей, расположенных под углом атаки к поступающему снизу потоку, соединенных с грузом стропами и соединенных между собой двумя управляемыми размыкаемыми креплениями.
| RU 2011151970 A, 27.06.2013 | |||
| US 4955563 A1, 11.09.1990 | |||
| ВРАЩАЮЩИЙСЯ ПАРАШЮТ | 1991 |
|
RU2028255C1 |
| JP 2000280994 A, 10.10.2000 | |||
| US 6669146 B2, 30.12.2003. | |||

