Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству для получения информации об объекте.
Уровень техники
Рентгеновское маммографическое устройство получило широкую известность как диагностическое устройство визуализации, эффективное при обнаружении или диагностике рака молочной железы. В последние стал также привлекать внимание способ, по которому сквозь объект пропускают световую энергию, принимают фотоакустический сигнал, образующийся в результате теплового расширения, вызываемого поглощением световой энергии, и визуализируют внутреннюю часть объекта по фотоакустическому сигналу. Фотоакустический сигнал является акустической волной, например, ультразвуковой волной. В частности, упомянутый сигнал называют также фотоакустической волной.
Для приема и обработки фотоакустического сигнала предпочтителен вариант, в котором принимают фотоакустический сигнал и преобразуют его в электрический сигнал. Фотоакустический сигнал преобразуют в электрический сигнал, обычно, с помощью такого преобразовательного элемента, как CMUT (емкостной ультразвуковой преобразователь, полученный методом микрообработки), изготавливаемый с использованием технологии пьезоэлектрических элементов или полупроводниковой технологии. Фактически, обычно применяют зонд, в котором расположены по меньшей мере два упомянутых преобразовательных элемента.
Однако, с точки зрения стоимости и выхода, изготовление зонда с размером, достаточным для одновременного получения фотоакустических сигналов от всей молочной железы является трудной задачей. Для решения данной проблемы, в патентном документе PTL 1, например, предложено ультразвуковое диагностическое устройство, которое автоматически выполняет механическое сканирование с использованием ультразвукового зонда для приема фотоакустических сигналов и реконструирует трехмерное изображение по широкой области обследования.
При этом исследовали технологию вычисления присутствующих веществ с разными спектрами оптического поглощения по фотоакустическим сигналам, полученным вследствие излучения света множества длин волн.
Например, в непатентном документе NPL 1 приведено описание способа вычисления насыщения крови кислородом и т.п. с использованием множества длин волн, на основе различия между спектрами оптического поглощения оксигемоглобина и дезоксигемоглобина, присутствующих в крови.
Если в некотором положении используют коэффициенты поглощения (µa λ1 и µa λ2), соответствующие длинам волн λ1 и λ2, то насыщение кислородом (SO2) вычисляют из нижеприведенного выражения (1).
[Формула 1]

В приведенной формуле, [HbO2] означает концентрацию оксигемоглобина, и [Hb] означает концентрацию дезоксигемоглобина. Символы εHb λ1 и εHb λ2 означают молярные коэффициенты поглощения дезоксигемоглобина на длинах волн λ1 и λ2, соответственно. Символы ΔεHb λ1 и ΔεHb λ2 являются значениями, полученными вычитанием молярных коэффициентов поглощения дезоксигемоглобина из молярных коэффициентов поглощения оксигемоглобина на длинах волн λ1 и λ2, соответственно.
В патентном документе PTL 2 приведено описание также устройства измерения концентрации глюкозы посредством излучения двух длин волн.
Список литературы
Патентная литература
PTL 1: Японский патент № 4448189
PTL 2: Публикация заявки на патент Японии № 2010-139510
Непатентная литература
NPL 1: Journal of Biomedical Optics 14(5), 054007
Раскрытие изобретения
Техническая проблема
Когда механическое сканирование выполняют зондом таким образом, чтобы к области обследования некоторого объекта излучалось множество длин волн, и принимались фотоакустические сигналы, соответствующие упомянутым длинам волн, возможно возникновение проблемы в связи с тем, что объект перемещается во время сканирования.
Временной интервал визуализации (временной интервал приема фотоакустической волны), необходимый для получения фотоакустических сигналов из области (240 мм×180 мм), равной панели, применяемой в обычной маммографии, вычисляют нижеописанным способом. Например, предполагается, что размер элемента равен 2 кв. мм, число приемных каналов (CH) равно 500 CH, частота повторения излучения света равна 10 Гц, и среднее значение вычисляют по 256 измерениям, чтобы повысить отношение сигнал/шум (SN) принимаемого сигнала. В данном случае, простая арифметика дает, (240×180×256)÷2×2×500×10)=552,96 (сек), то есть для получения фотоакустических сигналов, соответствующих одной длине волны требуется временной интервал визуализации, приблизительно, 9 мин.
Как изложено выше, для вычисления, например, насыщения кислородом используют коэффициенты поглощения, соответствующие множеству длин волн в точках фокусировки. Однако, если имеет место разность во времени, приблизительно, 9 мин между моментом времени, в который фотоакустический сигнал в точке фокусировки получают с использованием длины волны λ1, и моментом времени, в который фотоакустический сигнал в точке фокусировки получают с использованием длины волны λ2, то высока вероятность смещения объекта, особенно, живого биологического объекта.
Чтобы вычислить насыщение кислородом или сходный показатель в некоторой точке фокусировки, следует применять коэффициенты поглощения, соответствующие длинам волн λ1 и λ2 в точке фокусировки. Если происходит смещение вследствие временной разности моментов времени, в которые собирают данные, соответствующие длине волны λ1, (моментом времени, в который принимают фотоакустическую волну) и собирают данные, соответствующие длине волны λ2 (моментом времени, в который принимают фотоакустическую волну), то это означает, что, в результате, насыщение кислородом вычисляют с использованием коэффициентов поглощения, соответствующих разным положениям. Данное различие приводит к погрешности результата вычислений и снижению надежности и точности.
Настоящее изобретение предложено ввиду вышеприведенных проблем. Соответственно, задача настоящего изобретения состоит в создании технологии для предотвращения появления погрешности, обусловленной перемещением объекта, в устройстве для получения информации об объекте, которое получает фотоакустические сигналы с использованием света множества длин волн.
Решение проблемы
Настоящее изобретение обеспечивает устройство для получения информации об объекте, содержащее:
источник света, выполненный с возможностью излучения импульсного света множества длин волн;
контроллер длин волн, выполненный с возможностью переключения длины волны импульсного света;
зонд, выполненный с возможностью приема акустической волны, формируемой и распространяющейся в объекте, облучаемом импульсным светом, излучаемым на объект;
контроллер сканирования, выполненный с возможностью перемещения зонда в пределах заданного диапазона сканирования; и
процессор данных, выполненный с возможностью получения информации об объекте с использованием множества электрических сигналов, соответствующих длинам волн импульсного света, выдаваемых зондом в каждом положении приема в области сканирования;
при этом, контроллер длин волн переключает длину волны импульсного света до того, как зонд сканирует всю область сканирования по мере приема в каждом положении приема акустической волны, соответствующей по меньшей мере одной из длин волн импульсного света.
Полезные эффекты изобретения
Настоящее изобретение может обеспечить технологию предотвращения появления погрешности, обусловленной перемещением объекта, в устройстве для получения информации об объекте, которое получает фотоакустические сигналы с использованием света множества длин волн.
Другие признаки настоящего изобретения будут очевидны из нижеследующего описания примерных вариантов осуществления, со ссылкой на прилагаемые чертежи.
Краткое описание чертежей
Фиг. 1 - диаграмма, схематически представляющая концепцию сбора данных с использованием множества длин волн.
Фиг. 2 - диаграмма, схематически представляющая перемещение зонда, при котором не применяется настоящее изобретение.
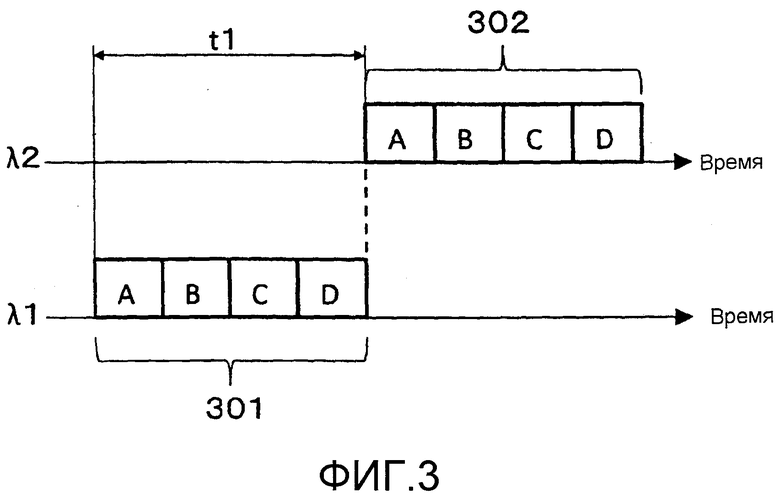
Фиг. 3 - временная диаграмма, представляющая сбор данных, при котором не применяется настоящее изобретение.
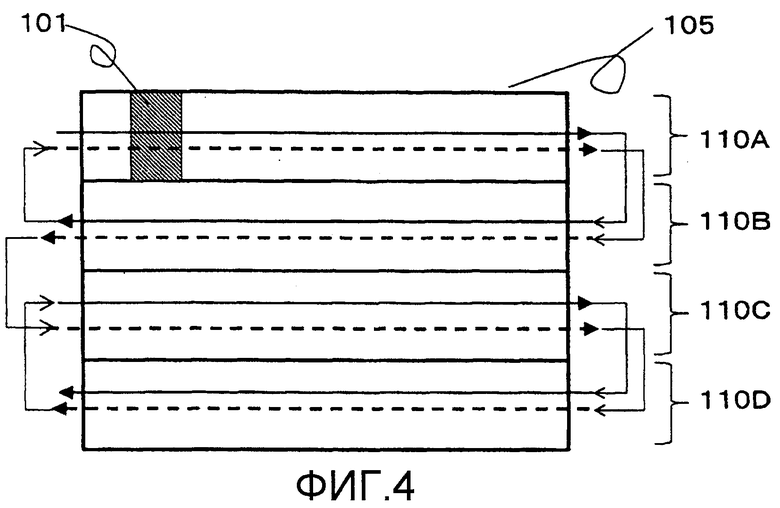
Фиг. 4 - диаграмма, схематически представляющая перемещение зонда в соответствии с настоящим изобретением.
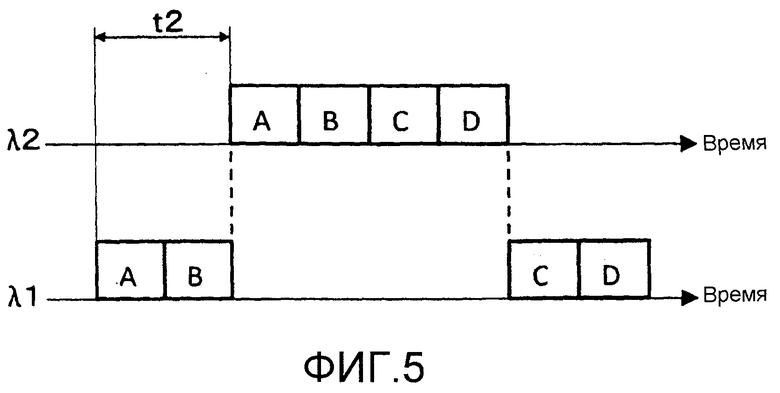
Фиг. 5 - временная диаграмма, представляющая сбор данных в соответствии с настоящим изобретением.
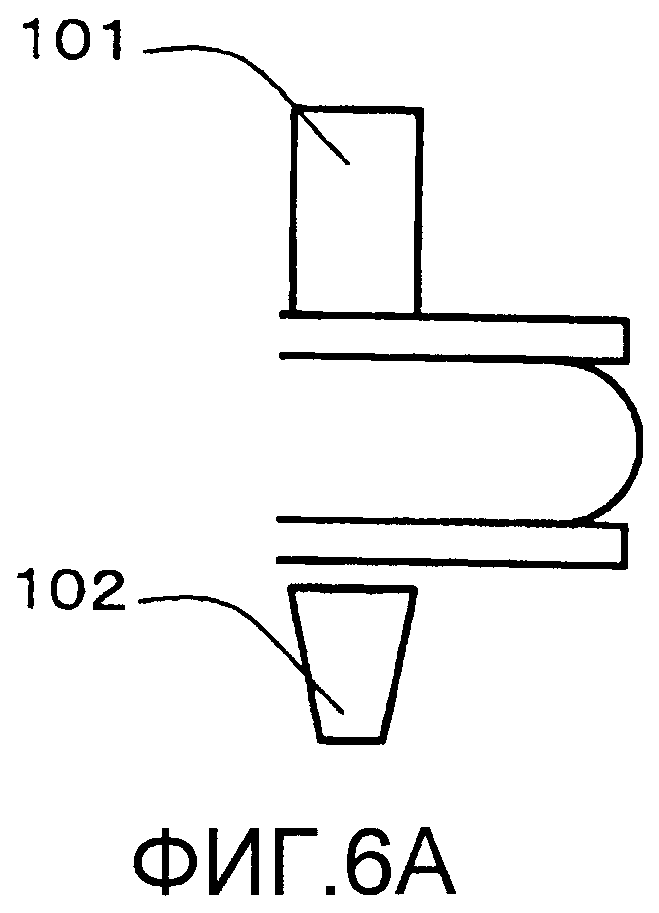
Фиг. 6A-6C - схемы, представляющие конфигурацию ультразвукового диагностического устройства в соответствии с первым вариантом осуществления.
Фиг. 7 - схематическое изображение системы в соответствии с настоящим изобретением.
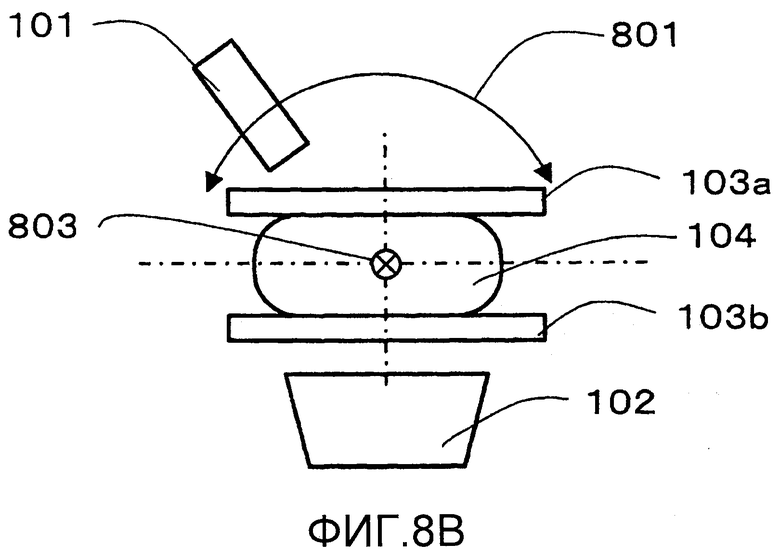
Фиг. 8A и 8B - схемы, представляющие конфигурацию ультразвукового диагностического устройства в соответствии со вторым вариантом осуществления.
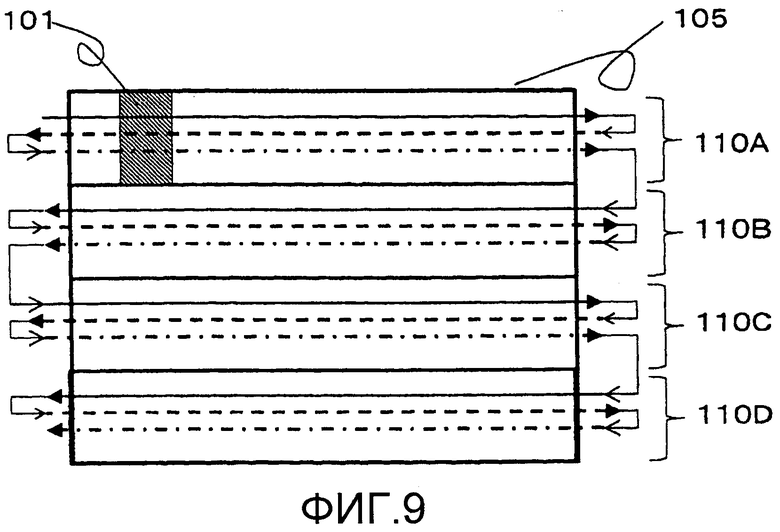
Фиг. 9 - диаграмма, схематически представляющая перемещение зонда в соответствии со вторым вариантом осуществления.
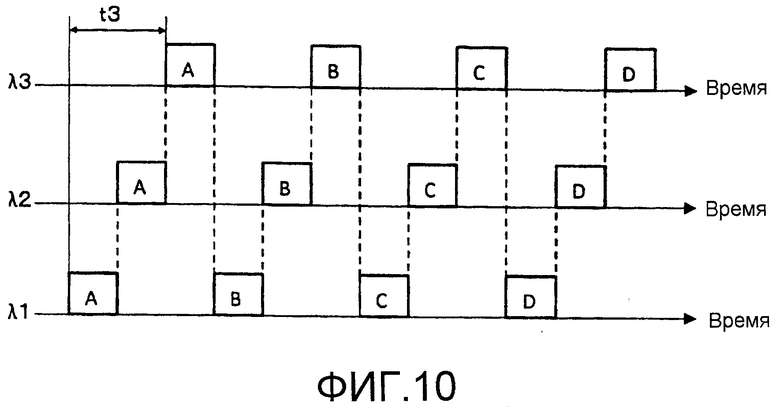
Фиг. 10 - временная диаграмма, представляющая сбор данных в соответствии со вторым вариантом осуществления.
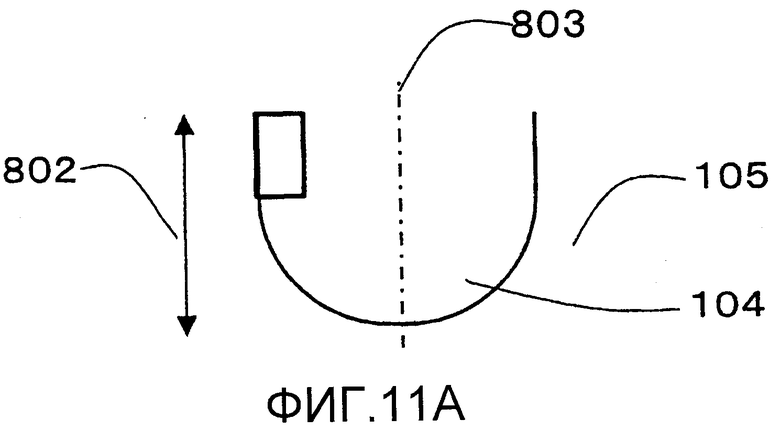
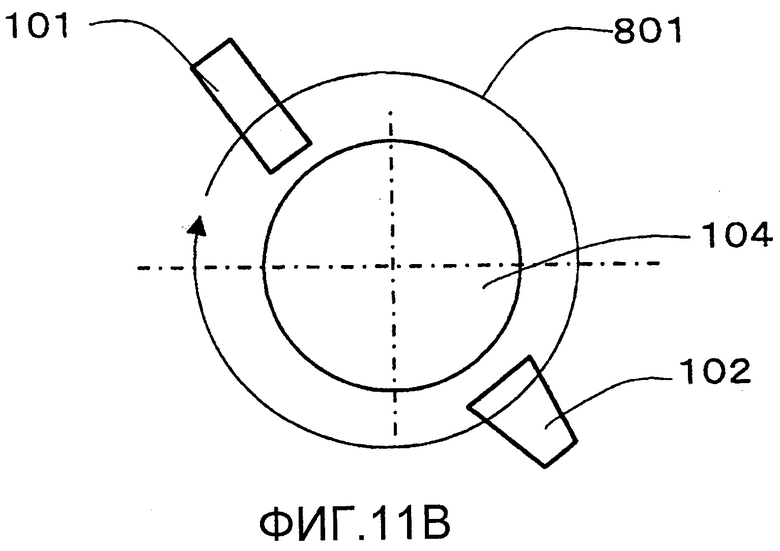
Фиг. 11A и 11B - схемы, представляющие конфигурацию ультразвукового диагностического устройства в соответствии с третьим вариантом осуществления.
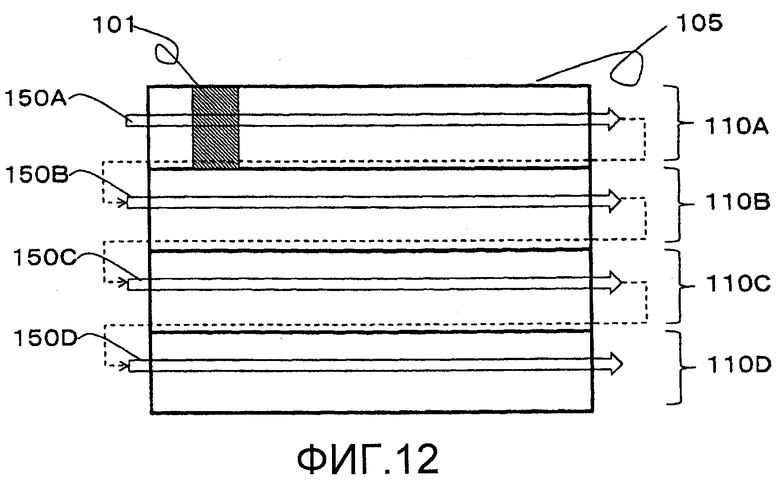
Фиг. 12 - диаграмма, схематически представляющая перемещение зонда в соответствии с третьим вариантом осуществления.
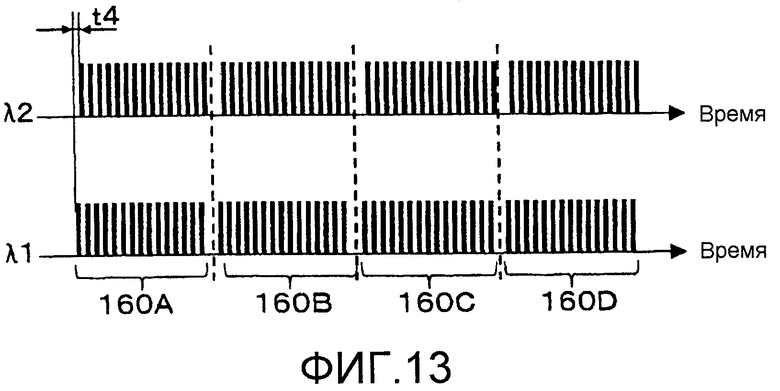
Фиг. 13 - временная диаграмма, представляющая сбор данных в соответствии с третьим вариантом осуществления.
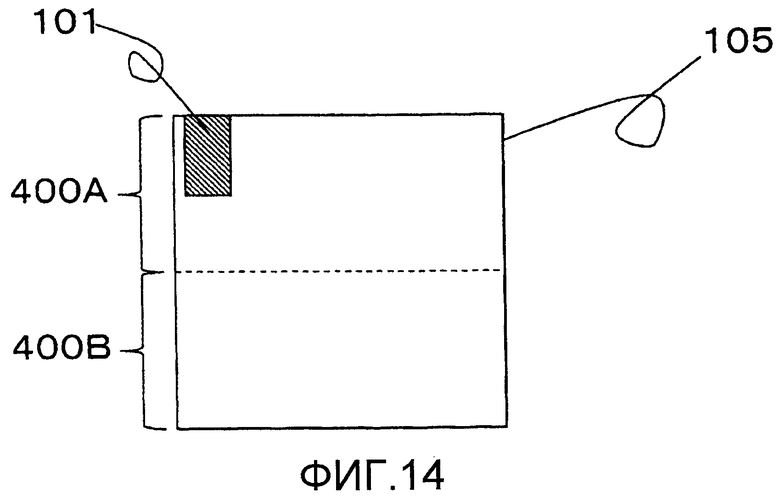
Фиг. 14 - диаграмма, схематически представляющая диапазон сбора данных в соответствии с настоящим изобретением.
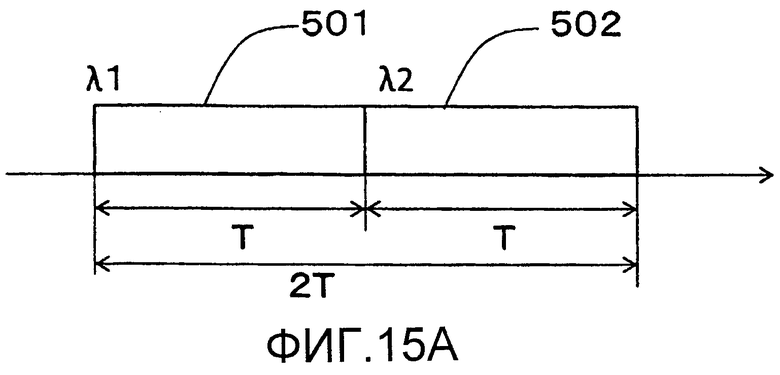
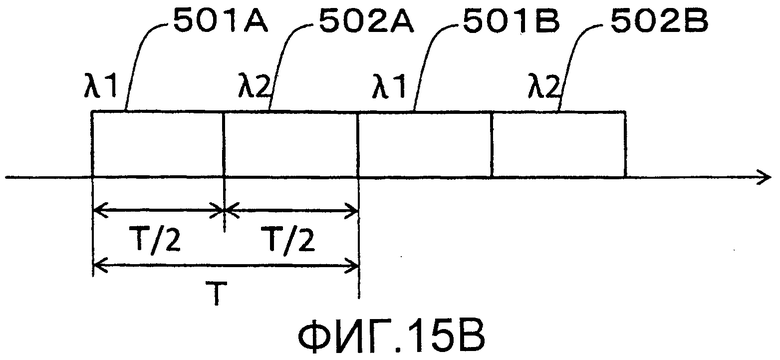
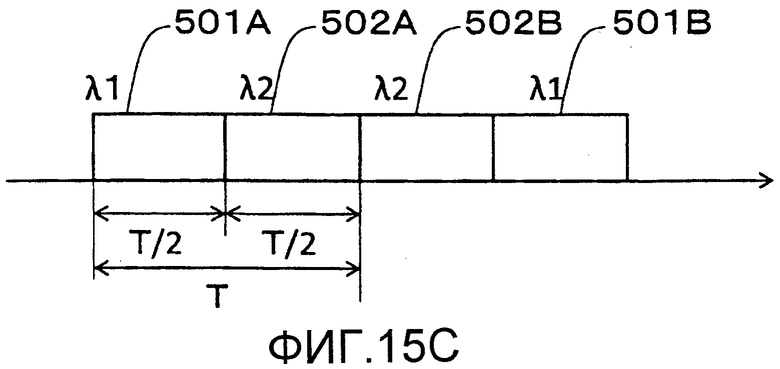
Фиг. 15A-15C - временные диаграммы сбора данных в соответствии с существующим или настоящим изобретением.
Осуществление изобретения
Ниже приведено описание предпочтительных вариантов осуществления настоящего изобретения со ссылкой на прилагаемые чертежи.
Устройство для получения информации объекте является устройством, которое использует фотоакустический эффект, при посредстве которого принимают акустическую волну (обычно, ультразвуковую волну), образующуюся в объекте в результате излучения света (электромагнитной волны) на объект и распространяющуюся в данном объекте, и получают информацию об объекте в виде данных изображения. Акустическую волну, образующуюся в результате фотоакустического эффекта, называют также фотоакустической волной. Примеры информации об объекте включают в себя начальное акустическое давление акустической волны, плотность поглощенной световой энергии, коэффициент поглощения, информацию, отражающую концентрации веществ, составляющих ткани в объекте, и другую информацию, которые можно получить из принятых сигналов акустических волн. Например, концентрации веществ могут быть насыщением кислородом, концентрацией оксигемоглобина/дезоксигемоглобина или концентрацией глюкозы. Кроме того, информацию об объекте можно получать в виде численных данных или данных изображения, показывающих информацию о распределении в каждом месте (т.е. в каждой заданной точке) в объекте. То есть информацию об объекте можно получать как данные изображения, показывающие информацию о распределении, отражающую, например, распределение концентрации кислорода в объекте.
Основные принципы операции получения фотоакустических сигналов поясняются ниже со ссылкой на фиг. 14 и 15.
На фиг. 14 приведена диаграмма, схематически представляющая диапазон сбора данных в соответствии с настоящим изобретением. В настоящем изобретении, «диапазон сбора данных» относится к заданному диапазону сканирования, который содержит множество положений приема, в которых зонд принимает акустические волны, и который сканируют для того, чтобы зонд принял множество акустических волн. Упомянутый заданный диапазон сбора данных может быть заблаговременно заданным диапазоном или может диапазоном, каждый раз назначаемым пользователем. Во время сканирования в пределах упомянутого диапазона сбора данных, зонд принимает акустические волны, что дает возможность получать, в виде данных изображения, информацию о трехмерном объекте, например, распределение насыщения кислородом в объекте. Зонд 101 перемещается в пределах диапазона 105 сбора данных и принимает фотоакустические волны. В нижеприведенном описании, упомянутые фотоакустические волны, регистрируемые зондом, называются фотоакустическими сигналами.
В данном случае предполагается, что фотоакустические сигналы, соответствующие импульсному свету двух разных длин волн, λ1 и λ2, получают в пределах всего диапазона 105 сбора данных. Когда настоящее изобретение не применяют, предполагается, что операцию выполняют таким образом, что по всей области диапазона 105 сбора данных получают фотоакустический сигнал, соответствующий импульсному свету с длиной волны λ1, затем, выполняют переключение длины волны, и по всему диапазону 105 сбора данных получают фотоакустический сигнал, соответствующий импульсному свету с длиной волны λ2. Как показано на фиг. 15A, операция состоит из временного интервала 501, потребного для получения фотоакустического сигнала, соответствующего импульсному свету с длиной волны λ1, и временного интервала 502, потребного для получения фотоакустического сигнала, соответствующего импульсному свету с длиной волны λ2. Если временной интервал, необходимый зонду 101 для сканирования по всему диапазону 105 сбора данных, обозначить T, то, в сумме, требуется временной интервал 2T. Кроме того, между временными интервалами, необходимыми для получения фотоакустических сигналов, соответствующих разным длинам волн, существует средняя разность T.
Ниже приведено описание сбора данных с применением настоящего изобретения. Диапазон 105 сбора данных разбивают на частичный диапазон 400A сбора данных и частичный диапазон 400B сбора данных, которые являются частичными областями. Порядок сбора данных показан на фиг. 15B. То есть может быть выполнена следующая процедура: сначала получают (501A) фотоакустический сигнал, соответствующий импульсному свету с длиной волны λ1 (первой длиной волны), в частичном диапазоне 400A сбора данных, затем выполняют переключение длины волны, и получают (502A) фотоакустический сигнал, соответствующий импульсному свету с длиной волны λ2 (второй длиной волны), в частичном диапазоне 400A сбора данных; затем снова выполняют переключение длины волны, получают (501B) фотоакустический сигнал, соответствующий импульсному свету с длиной волны λ1, в частичном диапазоне 400B сбора данных, затем, выполняют переключение длины волны и получают (502B) фотоакустический сигнал, соответствующий импульсному свету с длиной волны λ2, в частичном диапазоне 400B сбора данных. Если временной интервал, необходимый зонду 101 для сканирования по всему диапазону 105 сбора данных, представлен значением T, то суммарный необходимый временной интервал равен 2T, то есть является таким же, как выше. Однако, средняя разность между временными интервалами, необходимыми для получения фотоакустических сигналов, соответствующих разным длинам волн, уменьшается до T/2.
То есть прежде, чем фотоакустический сигнал, образованный в результате излучения импульсного света одной из двух длин волн, получают по всему диапазону 105 сбора, длину волны переключают на другую длину волны, и фотоакустический сигнал получают с использованием данной длины волны. Это означает, что переключение между длинами волн импульсного света выполняют до завершения сканирования всего диапазона сбора данных (диапазона сканирования), с приемом фотоакустической волны, соответствующей импульсному свету одной длины волны, в каждом положении приема. Данное решение дает возможность уменьшить разность между временными интервалами, необходимыми для получения фотоакустических сигналов, соответствующих разным длинам волн. В данном случае, переключение длин волн выполняют три раза.
Кроме того, возможен случай, типа показанного на фиг. 15C. То есть может быть выполнена следующая процедура: сначала получают (501A) фотоакустический сигнал, соответствующий импульсному свету с длиной волны λ1, в частичном диапазоне 400A сбора данных, затем выполняют переключение длины волны и получают (502A) фотоакустический сигнал, соответствующий импульсному свету с длиной волны λ2, в частичном диапазоне 400A сбора данных; в дальнейшем, получают (502B) фотоакустический сигнал, соответствующий импульсному свету с длиной волны λ2, в частичном диапазоне 400B сбора данных, затем выполняют переключение длины волны и получают (501B) фотоакустический сигнал, соответствующий импульсному свету с длиной волны λ1 в частичном диапазоне 400B сбора данных. В данном случае, разность между временными интервалами, необходимыми для получения фотоакустических сигналов, соответствующих разным длинам волн, можно уменьшить точно также как в вышеприведенном случае. В данном случае, переключение длин волн выполняют два раза.
Если весь диапазон сбора данных разбивают на число M частичных диапазонов сбора данных (частичных областей) (M>2) в случае, когда фотоакустические сигналы получают с использованием разных длин волн N типов, при применении настоящего изобретения, то минимальное значение для числа раз переключений длин волн равно (N-1)×M. В предыдущем примере, поскольку используют два типа длин волн, весь диапазон сбора данных разбивают на два частичных диапазона сбора данных, то минимальное число раз равно (2-1)×2=2.
Между тем, когда настоящее изобретение не применяют, и весь диапазон сбора данных сканируют с использованием одной длины волны, и затем длину волны переключают на другую длину волны, число раз переключений длин равно (N-1).
То есть прежде, чем все данные (акустические волны) собирают во всех положениях приема в пределах диапазона сбора данных посредством излучения разных длин волн N типов, длину волны переключают (N-1)×M раз, что сокращает разность между временными интервалами, необходимыми для получения фотоакустических сигналов, соответствующих разным длинам волн. То есть можно не допустить погрешности, обусловленной перемещением объекта, которое сопутствует прохождению времени.
(Первый вариант осуществления)
Ниже со ссылкой на чертежи приведено подробное описание варианта осуществления устройства для получения биологической информации в соответствии с настоящим изобретением.
В дальнейшем, сначала поясняются общие принципы и работа системы в соответствии с настоящим вариантом осуществления, и затем приведено описание операции сбора данных.
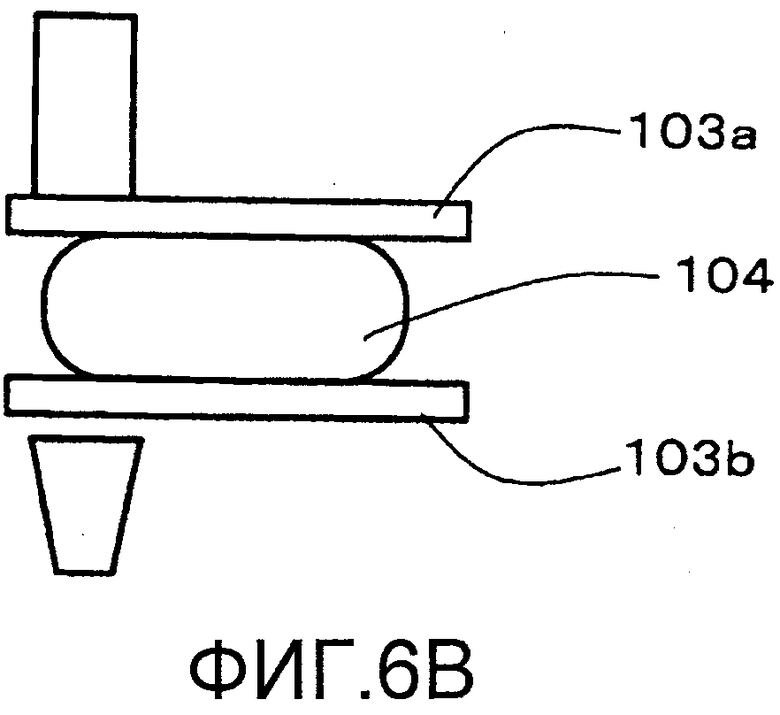
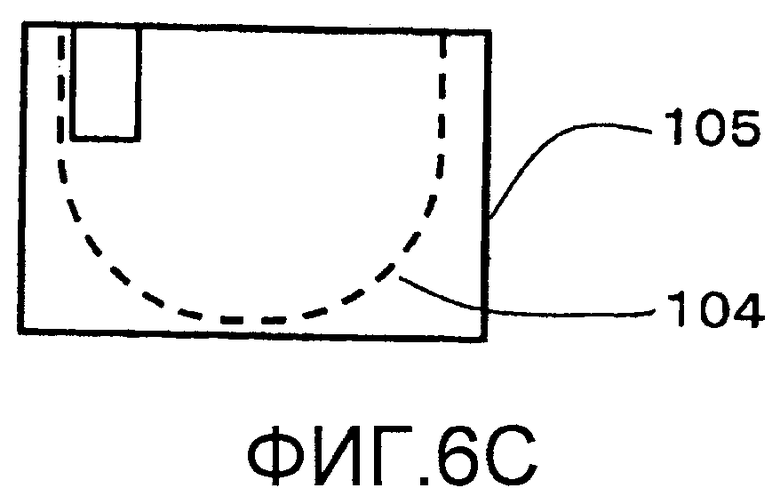
На фиг. 6 приведены схемы ультразвукового диагностического устройства в соответствии с первым вариантом осуществления настоящего изобретения и показана конфигурация частей вокруг объекта. Каждая из фиг. 6A и 6B является сечением устройства, на виде с направления, перпендикулярного направлению, в котором сжимают объект. На фиг. 6C приведен вид в плане фиксирующей пластины на виде с направления, в котором сжимают объект.
Каждый объект (молочная железа в настоящем варианте осуществления) 104 помещен и зафиксирован между двумя фиксирующими пластинами 103 (103a и 103b). Зонд 101 установлен со стороны фиксирующей пластины 103a, противоположной молочной железе 104. Светоизлучающий блок 102 установлен со стороны фиксирующей пластины 103b, противоположной молочной железе 104. Зонд 101 и светоизлучающий блок 102 перемещаются в диапазоне 105 сбора данных, как показано изменением между фиг. 6A и фиг. 6B.
Объект не является компонентом ни одной части устройства для получения информации объекте в соответствии с настоящим изобретением. Однако к объекту применимо следующее пояснение: если устройство для получения информации объекте применяют для диагностики злокачественной опухоли, заболевания кровеносных сосудов, определения уровня сахара в крови или чего-то подобного у человека или животного, или для последующего наблюдения за результатами химиотерапии, то можно предположить, что объектом является не молочная железа, а другой участок, например, палец, рука или нога человека или животного.
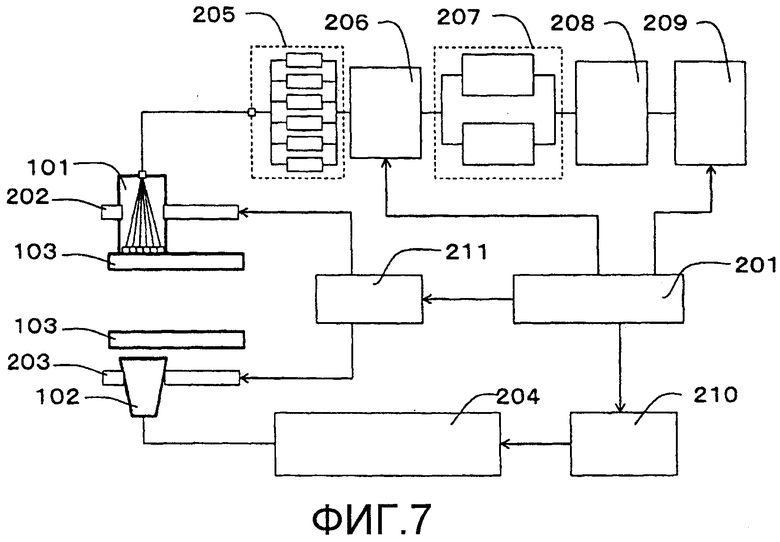
На фиг. 7 приведена схема, представляющая общие принципы системы в соответствии с настоящим изобретением. Лазерный источник 204 света генерирует импульсный свет (обычно, импульс 100 нс или короче) с длиной волны (обычно, от 700 нм до, приблизительно, 1100 нм), близко расположенной к ближней инфракрасной области спектра, в соответствии с сигналом управления синхронизацией из системного контроллера 201 и сигналом управления длиной волны из контроллера 210 длин волн лазера. После прохождения по оптическому пути, упомянутый импульсный свет распространяется сквозь фиксирующую пластину 103 (не показанную) из светоизлучающего блока 102 и излучается на объект (не показанный). Следовательно, светопоглощающее вещество в объекте поглощает импульсный свет и генерирует акустические волны. В настоящем изобретении, термин свет означает электромагнитные волны, содержащие видимое и инфракрасное излучение. В зависимости от составляющей, подлежащей измерению, возможен выбор конкретной длины волны. Контроллер 210 длин волн лазера служит контроллером длин волн в соответствии с настоящим изобретением, и лазерный источник света служит источником света в соответствии с настоящим изобретением.
Зонд 101 содержит множество преобразовательных элементов. При применении упомянутых преобразовательных элементов, зонд принимает фотоакустические волны через фиксирующую пластину 103 и преобразует их в электрические сигналы (принимаемые сигналы). Приемная электронная система 205 подвергает принимаемые сигналы, выдаваемые зондом 101, процессам дискретизации и усиления и преобразует упомянутые сигналы в цифровые сигналы (оцифрованные принимаемые сигналы).
При использовании информации о диапазоне сбора данных, заданной системным контроллером 201, контроллер 211 сканирования управляет механизмом 202 сканирования зонда и механизмом 203 сканирования излучающей системы и перемещает зонд 101 и светоизлучающий блок 102. Затем повторно выполняют вышеописанные излучение света и прием фотоакустических сигналов.
Блок 206 реконструкции выполняет процесс реконструкции изображения, с использованием информации о положении зонда и т.д., вводимой из системного контроллера 201, и с использованием цифровых сигналов, введенных из приемной электронной системы 205. Упомянутая реконструкция изображения является процессом для вычисления начального распределения акустического давления p(r) фотоакустических волн в объекте с использованием метода FBP (фильтрованных обратных проекции) или подобного метода, представляемого, например, нижеприведенной формулой (2).
[Формула 2]
 ,
,
где dS0 означает размер детектора, S0 означает размер апертуры, используемой для реконструкции, каждое Pd(r0,t) означает сигнал, принятый соответствующим преобразовательным элементом, r0 означает положение соответствующего преобразовательного элемента, и t означает время приема.
Для каждой длины волны, блок 207 хранения реконструированных данных сохраняет начальные распределения акустического давления, реконструированные с разными длинами волн.
Из упомянутого блока 207 хранения реконструированных данных, блок 208 мультиволнового сложения принимает данные начального распределения акустического давления, реконструированные от разных длин волн, и выполняет вычисление и, тем самым, вычисляет такую информацию об объекте, как насыщение кислородом. Концентрацию глюкозы также можно вычислять посредством соответствующего управления множеством разных длин волн. Блок 209 отображения изображения отображает изображение под управлением системного контроллера 201. Примеры отображаемого изображения могут включать в себя, например: изображение, показывающее начальное распределение акустического давления или распределение коэффициента поглощения, вычисленные по фотоакустическим сигналам, полученным с использованием одной длины волны; и насыщение кислородом, вычисленное блоком 208 мультиволнового сложения.
Процесс, выполняемый в тракте от блока реконструкции до блока мультиволнового сложения, соответствует процессу, выполняемому процессором данных в соответствии с настоящим изобретением.
Далее, со ссылкой на чертежи, поясняется получение фотоакустических сигналов с использованием множества длин волн.
На фиг. 1 схематически показаны основные принципы сбора данных. Со ссылкой на данный чертеж приведено описание операции получения фотоакустических сигналов с использованием множества длин волн.
Зонд 101 с преобразовательными элементами перемещается и, тем самым, собирает данные (акустические волны) в соответствующих положениях в пределах диапазона 105 сбора данных. При этом зонд перемещается в диапазоне сбора данных таким образом, что зонд 101 перемещается в направлениях основного сканирования и субсканирования множество раз. Если принять, что зонд перемещается по методу растрового сканирования, то направлением основного сканирования обозначают направление перемещения вдоль линии сканирования, то есть направление, в котором зонд перемещается во время приема акустического сигнала в каждом положении приема. Направлением субсканирования обозначают направление перемещения между линиями сканирования, то есть направление, пересекающее (обычно, ортогонально) направление основного сканирования. Предполагается, что каждый частичный диапазон сбора данных, в котором данные собираются в результате одного перемещения в направлении основного сканирования, определен как 110A, 110B, 110C и 110D. В настоящем варианте осуществления, частичные диапазоны сбора данных являются областями, на которые диапазон сбора данных, т.е. диапазон сканирования, разбит в направлении субсканирования. Кроме того, каждый из частичных диапазонов 110A, 110B, 110C и 110D 110A сбора данных является диапазоном, соответствующим траектории сканирования, по которое следует зонд, перемещающийся в направлении основного сканирования в пределах диапазона сбора данных, при одновременном приеме акустической волны в каждой точке приема.
Предполагается, что фотоакустические сигналы, образованные излучениями импульсного света двух разных длин волн, принимаются по всему диапазону 105 сбора данных. Например, когда фотоакустические сигналы принимаются в результате излучений двух длин волн (λ1 и λ2), необходимо получать фотоакустические сигналы посредством излучения длин волн двух типов в четыре частичных диапазона сбора данных.
В сравнительном примере, со ссылкой на фиг. 2 поясняется операция, при которой не применяется настоящее изобретение.
Сначала зонд собирает данные (акустические волны) (как обозначено сплошной линией со стрелкой) посредством перемещения в пределах диапазона 105 сбора данных, при одновременном излучении импульсного света с длиной волны λ1. Затем, длину волны импульсного света переключают на λ2, и зонд перемещается (как обозначено штриховой линией со стрелкой) в пределах диапазона 105 сбора данных.
На фиг. 3 приведена временная диаграмма, представляющая частичные диапазоны сбора данных и излучаемые длины волн в случаях, когда выполняются упомянутые перемещения. Символы A, B, C и D (301) на оси, представленной как λ1 на чертеже, указывают распределение временных интервалов получения соответствующих фотоакустических сигналов в частичных диапазонах сбора данных (110A, 110B, 110C и 110D), в пределах которых излучался импульсный свет с длиной волны λ1. Кроме того, A, B, C и D (302) представляют распределение временных интервалов получения соответствующих фотоакустических сигналов в частичных диапазонах сбора данных (110A, 110B, 110C и 110D), в пределах которых излучался импульсный свет с длиной волны λ2.
В вышеописанном способе перемещения, все фотоакустические сигналы получают из диапазона 105 сбора данных посредством излучения одной из двух разных длин волн.
Когда выполняют упомянутое сканирование, интервал сбора данных между соответствующими фотоакустическими сигналами, относящимися к длинам волн λ1 и λ2, в пределах одного и того же частичного диапазона сбора данных (например, 110A) обозначен как t1.
На фиг. 4 изображена операция сбора данных, при которой применено настоящее изобретение.
Сначала, в лазерный источник 204 света передается сигнал управления длиной волны из контроллера 204 длин волн лазера, и устанавливается длина волны λ1. Из системного контроллера 201 передается сигнал управления синхронизацией лазерного излучения, и, вследствие этого, лазерный источник 204 света генерирует импульсный свет с длиной волны λ1. По сигналу управления из контроллера 211 сканирования, зонд 101 и светоизлучающий блок 102 перемещаются в направлении основного сканирования. В результате, получают (как показано сплошной линией со стрелкой в пределах 110A) фотоакустические сигналы, соответствующие импульсному свету с первой длиной волны λ1, в пределах частичного диапазона 110A сбора данных. В дальнейшем, зонд 101 и светоизлучающий блок 102 сдвигаются в направлении субсканирования и перемещаются в пределах частичного диапазона 110B сбора данных. Затем, пока зонд 101 и светоизлучающий блок 102 перемещаются в направлении основного сканирования в пределах частичного диапазона 110B сбора данных, выполняются излучение света и сбор данных (как показано сплошной линией со стрелкой в пределах 110B). Таким образом собираются данные в частичных диапазонах 110A и 110B сбора данных.
Затем, в лазерный источник 204 света передается сигнал управления длиной волны из контроллера 210 длин волн лазера, и устанавливается длина волны λ2. После этого собираются фотоакустические сигналы, соответствующие импульсному свету с длиной волны λ2 в частичных диапазонах 110A, 110B, 110C и 110D сбора данных (как обозначено штриховой линией со стрелкой в пределах 110A-110D).
В дальнейшем, в лазерный источник 204 света снова передается сигнал управления длиной волны из контроллера 210 длин волн лазера, и устанавливается длина волны λ1. Затем, получают фотоакустические сигналы, соответствующие импульсному свету с длиной волны λ1, в пределах диапазонов 110C и 110D сбора данных.
На фиг. 5 приведена временная диаграмма, представляющая частичные диапазоны сбора данных и излучаемые длины волн в случае, когда выполнены упомянутые перемещения. Каждая из двух штриховых линий между осями λ1 и λ2 указывает, что выполнено переключение длины волны. То есть переключение длины волны выполнялось два раза. В частности, электрические сигналы, соответствующие длинам волн импульсного света, были выданы зондом в соответствующих им положениях приема.
При сканировании зонда в настоящем варианте осуществления, прежде, чем из диапазона 105 сбора данных получают все фотоакустические сигналы при посредстве излучения импульсного света с одной из двух разных длин волн (например, λ1), длину волны импульсного света переключают. Кроме того, в моменты времени, когда второе и шестое перемещения в направлении основного сканирования из перемещений (восьми) в направлении основного сканирования завершаются, длина волны импульсного света, генерируемого лазерным источником 204 света, переключается.
При сканировании зонда в настоящем варианте осуществления, интервал сбора данных между соответствующими фотоакустическими сигналами, относящимися к длинам волн λ1 и λ2, в пределах одного и того же частичного диапазона 110A сбора данных обозначен как t2. Как изложено выше, упомянутый интервал сбора данных короче, чем в случае, когда в пределах всего диапазона 105 сбора данных получают фотоакустический сигнал, соответствующий излучению импульсного света с длиной волны λ1, и, затем, фотоакустический сигнал, соответствующий излучению импульсного света с длиной волны λ2. Соответственно, в настоящем варианте осуществления, интервал t2 составляет половину от t1.
Следовательно, в соответствии с настоящим вариантом осуществления можно не допустить погрешности, обусловленной перемещением объекта, которое сопутствует прохождению времени. Соответственно, когда вычисляют насыщение кислородом и т.д., с использованием принимаемых сигналов, соответствующих двум длинам волн (λ1 и λ2), не допускается погрешности, обусловленной смещением, и можно создать очень надежное, очень точное изображение. В настоящем варианте осуществления, предварительно получают два начальных распределения акустического давления, соответствующих двум длинам волн, и затем получают распределение насыщения кислородом. Однако, насыщение кислородом и т.д. можно получить с использованием электрических сигналов (принимаемых сигналов), выдаваемых зондом, когда принимаются фотоакустические волны, без получения упомянутых начальных распределений акустического давления.
Кроме того, в настоящем варианте осуществления, сбор данных в пределах каждого частичного диапазона сбора данных выполняется одним перемещением в направлении основного сканирования. Однако для получения необходимого отношения сигнал/шум (SN) сигнала, перемещение в направлении основного сканирования можно выполнять множество раз в то время, как излучается импульсный свет с одной и той же длиной волны. Например, даже при осуществлении управления таким образом, что перемещение в направлении субсканирования выполняется после одного перемещения вперед и назад в направлении основного сканирования, возможно получение того же положительного эффекта настоящего изобретения.
(Второй вариант осуществления)
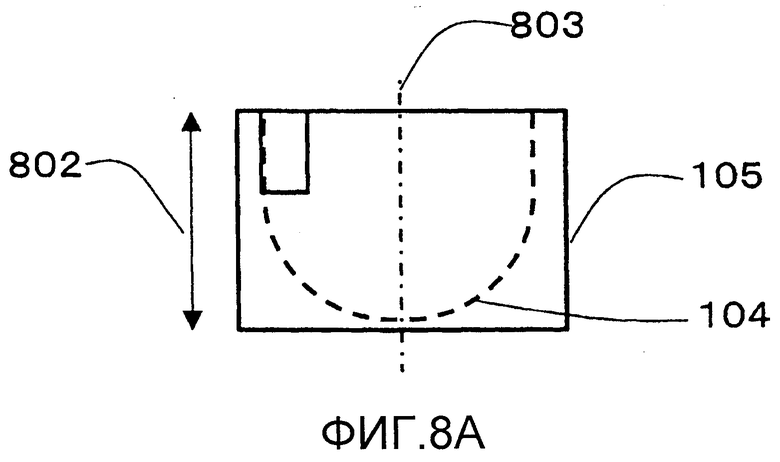
На фиг. 8 приведены схемы ультразвукового диагностического устройства в соответствии со вторым вариантом осуществления настоящего изобретения и показана конфигурация частей вокруг объекта. На фиг. 8B приведено сечение устройства на виде с направления, перпендикулярного направлению, в котором сжимают объект, и на фиг. 8A приведен вид в плане фиксирующей пластины на виде с направления, в котором сжимают объект.
Объект (молочная железа в настоящем варианте осуществления) 104 помещен и зафиксирован между двумя фиксирующими пластинами 103 (103a и 103b). Зонд 101 установлен со стороны фиксирующей пластины 103a, противоположной молочной железе 104. Светоизлучающий блок 102 установлен со стороны фиксирующей пластины 103b, противоположной молочной железе 104. Зонд 101 и светоизлучающий блок 102 перемещаются так, чтобы собирать данные в диапазоне 105 сбора данных.
Зонд 101 перемещается в круговом направлении 801, представляющем направление основного сканирования, вокруг оси 803 в объекте, и перемещается в направлении 802, представляющем направление субсканирования, по существу, перпендикулярное направлению основного сканирования.
Для приема акустических волн, распространяющихся сквозь фиксирующие пластины 103, между зондом 101 и фиксирующими пластинами 103 введена среда (например, вода или касторовое масло), которая пропускает ультразвуковые волны.
Поскольку общие принципы системы и поток обработки данных являются такими же, как в первом варианте осуществления, то их объяснение опущено, и ниже, со ссылкой на чертежи поясняется сбор фотоакустических сигналов с использованием множества длин волн.
На фиг. 9 изображена операция сбора данных, которая выполняется в настоящем варианте осуществления. Направление основного сканирования является круговым направлением вокруг оси 803, как изложено выше. Однако, в настоящем случае, для облегчения объяснения применен двумерный чертеж, на котором круговые направления развернуты в плоскости.
В настоящем варианте осуществления приведено описание случая, когда используют три длины волны.
Сначала устанавливают длину волны λ1, и зонд 101 перемещают в направлении основного сканирования и, тем самым, получают фотоакустический сигнал, соответствующий импульсному свету с длиной волны λ1, (как обозначено сплошной линией со стрелкой) в пределах частичного диапазона 110A сбора данных. Затем, длину волны переключают на λ2 и получают фотоакустический сигнал, соответствующий импульсному свету с длиной волны λ2, (как обозначено штриховой линией со стрелкой) в пределах частичного диапазона 110A сбора данных. Затем, длину волны переключают на λ3 и, после этого, получают фотоакустический сигнал, соответствующий импульсному свету с длиной волны λ3, (как обозначено штрихпунктирной линией со стрелкой) в пределах частичного диапазона 110A сбора данных. Затем, зонд сдвигается в направлении субсканирования и собирает данные в пределах частичного диапазона 110B сбора данных. Посредством повторения приведенной операции можно собрать данные вплоть до частичного диапазона 110D сбора данных.
Как изложено выше, перед сдвигом в направлении субсканирования выполняется перемещение в направлении основного сканирования (по меньшей мере, дважды, в частности, три раза в настоящем варианте осуществления), и управление для переключения длины волны осуществляется в момент времени по времени, когда завершено одно из перемещений в направлении основного сканирования.
На фиг. 10 приведена временная диаграмма, представляющая частичные диапазоны сбора данных и излучаемые длины волн в соответствии с настоящим вариантом осуществления. При сканировании зонда в настоящем варианте осуществления, интервал сбора данных между соответствующими фотоакустическими сигналами, относящимися к длинам волн λ1 и λ3, в пределах одного и того же частичного диапазона 110A сбора данных обозначен как t3. Данный интервал сбора данных заметно короче, чем в случае, когда фотоакустические сигналы, соответствующие излучению импульсного света с длиной волны λ2, и фотоакустические сигналы, соответствующие излучению импульсного света с длиной волны λ3, получают после того, как во всем диапазоне 105 сбора данных получают фотоакустические сигналы, соответствующие излучению импульсного света с длиной волны λ1. В настоящем варианте осуществления, временная разность уменьшена до 1/4 от временной разности в случае, когда настоящее изобретение не применяют.
В соответствии с настоящим вариантом осуществления, переключение длины волны и перемещение в направлении основного сканирования выполняют множество раз до сдвига в направлении субсканирования. Следовательно, возможно дополнительное сокращение интервалов сбора данных между фотоакустическими сигналами, соответствующими разным длинам волн в пределах одного и того частичного диапазона сбора данных. То есть можно дополнительно уменьшить погрешность, обусловленную перемещением объекта, которое сопутствует прохождению времени.
Следовательно, при использовании данных, реконструированных по фотоакустическим сигналам, полученным от длин волн (λ1, λ2 и λ3), погрешность, обусловленная смещением, дополнительно уменьшается, когда насыщение кислородом и т.д. вычисляется в блоке мультиволнового сложения. Соответственно, возможно создание более надежного, очень точного изображения.
В настоящем варианте осуществления, направление основного сканирования назначено как круговое направление вокруг оси. Однако, даже когда зонд применяют для двумерного сканирования, как в случае пространственного расположения в соответствии с первым вариантом осуществления, возможно получение полезных эффектов настоящего изобретения.
(Третий вариант осуществления)
На фиг. 11 приведена схема ультразвукового диагностического устройства в соответствии с третьим вариантом осуществления настоящего изобретения и показана конфигурация частей вокруг объекта. На фиг. 11A и 11B приведены схемы провисающего объекта на видах с одной стороны и сверху, соответственно.
Объекту (молочной железе в настоящем варианте осуществления) 104 предоставлена возможность провисания. Зонд 101 и светоизлучающий блок 102 установлены в противоположных положениях относительно объекта 104 между ними. Зонд 101 и светоизлучающий блок 102 перемещают так, чтобы собирать данные в диапазоне сбора данных.
Зонд 101 перемещается в круговом направлении 801, представляющем направление основного сканирования, вокруг оси 803 по длине объекта, и перемещается в направлении 802, представляющем направление субсканирования, по существу, перпендикулярное направлению основного сканирования. В настоящем варианте осуществления, диапазон сбора данных является диапазоном, полученным перемещением плоскости, в которой зонд 101 поворачивается 360° вокруг оси 803, в направлении субсканирования.
Для приема фотоакустических волн, образующихся в объекте 104, между зондом 101 и объектом 104 введена среда (например, вода или касторовое масло), которая пропускает ультразвуковые волны.
Поскольку общие принципы системы и поток обработки данных являются такими же, как в первом варианте осуществления, то их объяснение опущено, и ниже, со ссылкой на чертежи поясняется сбор фотоакустических сигналов с использованием множества длин волн.
На фиг. 12 изображена операция сбора данных, которая выполняется в настоящем варианте осуществления. Направление основного сканирования является круговым направлением вокруг оси 803, как изложено выше. Однако, в настоящем случае, для облегчения объяснения применен двумерный чертеж, на котором круговые направления развернуты в плоскости. То есть правый и левый концы диапазона 105 сбора данных на фиг. 12 являются неразрывными между собой.
Сначала зонд 101 поворачивают на 360° (как обозначено двойной линией со стрелкой 150A) вокруг оси 803. Во время перемещения в направлении основного сканирования выполняют переключение длины волны. В настоящем варианте осуществления, длину волны переключают для каждого импульса. То есть переключение происходит в следующем порядке: λ1, λ2, λ1, λ2 и т.д. Для скоростного переключения длины волны импульсного света, генерируемого лазерным источником света, возможно попеременное применение двух лазеров.
Приведенная операция позволяет получать фотоакустические сигналы, соответствующие импульсному свету с длинами волн λ1 и λ2, в пределах частичного диапазона 110A сбора данных. В момент, когда зонд 101 повернулся на 360° вокруг оси 803, зонд 101 сдвигают в направлении субсканирования, и зонд 101 снова поворачивают на 360° (как обозначено двойной линией со стрелкой 150B) вокруг оси 803, и, тем самым, собирают данные в пределах частичного диапазона 110B сбора данных. Аналогичным образом собирают данные для частичных диапазонов сбора данных 110C и 110D.
Когда перемещение в направлении основного сканирования выполняется вышеописанным образом, осуществляется управление для переключения длины волны импульсного света, генерируемого лазерным источником света, и из диапазона сбора данных собираются данные.
На фиг. 13 приведена временная диаграмма, представляющая излучаемые длины волн. Диапазон 160A схематично изображает период, в течение которого переключение длины волны выполняется для каждого импульса, и каждый фотоакустический сигнал, соответствующий импульсному свету с длиной волны λ1, и каждый фотоакустический сигнал, соответствующий импульсному свету с длиной волны λ2, получают в пределах частичного диапазона 110A сбора данных. Аналогично, диапазоны 160B, 160C и 160D соответствуют 110B, 110C и 110D.
При сканировании зонда в настоящем варианте осуществления, интервал сбора данных между фотоакустическими сигналами, соответствующими длинам волн λ1 и λ2, в пределах одного и того же частичного диапазона сбора данных обозначен как t4. Данный интервал сбора данных заметно короче, чем в случае, когда фотоакустические сигналы, соответствующие излучению импульсного света с длиной волны λ2, получают после того, как во всем диапазоне сбора данных получают фотоакустические сигналы, соответствующие излучению импульсного света с длиной волны λ1.
В соответствии с настоящим вариантом осуществления, поскольку переключение длины волны выполняется во время перемещения в направлении основного сканирования, то интервал сбора данных между фотоакустическими сигналами, соответствующими разным длинам волн, может быть дополнительно сокращен в пределах одного и того же частичного диапазона сбора данных. То есть можно дополнительно уменьшить погрешность, обусловленную перемещением объекта, которое сопутствует прохождению времени.
Следовательно, при использовании данных, реконструированных по фотоакустическим сигналам, полученным от множества длин волн (λ1 и λ2), погрешность, обусловленная смещением, дополнительно уменьшается, когда насыщение кислородом и т.д. вычисляется в блоке мультиволнового сложения. Соответственно, возможно создание более надежного, очень точного изображения.
В настоящем варианте осуществления, в то время, как зонд непрерывно перемещают в направлении основного сканирования, выполняется переключение длины волны и получение фотоакустических сигналов. В частности, при перемещении в направлении основного сканирования, зонд не останавливается в каждом положении приема, а перемещается почти с постоянной скоростью.
Поэтому, как показано на фиг. 13, положение сбора данных (положение приема) фотоакустического сигнала, когда излучается свет с длиной волны λ1, и упомянутое положение, когда излучается свет с длиной волны λ2, не совпадают в точности. Однако, если частота импульсного света является достаточно высокой, то обработка данных может продолжаться, по существу, без учета разностей между положения сбора данных. Кроме того, даже если положение сбора данных фотоакустического сигнала, соответствующего каждому световому импульсу, смещается, в блоке 206 реконструкции вычисляются данные изображения в фиксированной области в пределах каждого частичного диапазона сбора данных. Следовательно, можно обеспечить реконструкцию изображения, соответствующую одному и тому же положению.
В альтернативном варианте, зонд можно останавливать в одном положении на объекте, при этом принимаются фотоакустические сигналы с использованием света с длинами волн λ1 и λ2, и затем зонд можно перемещать в следующее положение. В данном случае, фотоакустические сигналы можно получать почти без временной разности в одном и том же положении приема относительно объекта.
В настоящем варианте осуществления, направление основного сканирования задано как круговое направление вокруг оси. Однако, даже когда зонд используют для двумерного сканирования, как в случае пространственного расположения в первом варианте осуществления, возможно получение полезных эффектов настоящего изобретения.
Выше приведено описание настоящего изобретения со ссылкой на примерные варианты осуществления, однако, следует понимать, что изобретение не ограничено раскрытыми примерными вариантами осуществления. Объем охраны нижеприведенной формулы изобретения должен получать максимально широкую интерпретацию, чтобы включать в себя все подобные модификации и эквивалентные конструкции и функции.
По настоящей заявке испрашивается приоритет на основании заявки на патент Японии № 2011-183574, поданной 25 августа 2011 г., которая в полном объеме включена в настоящую заявку путем ссылки.

Изобретение относится к медицинской технике, а именно к устройствам для получения информации об объекте. Устройство содержит источник света, выполненный с возможностью излучения импульсного света с множеством длин волн, контроллер длин волн, выполненный с возможностью переключения длины волны импульсного света, зонд, приема акустической волны, контроллер сканирования и процессор данных, выполненный с возможностью получения информации об объекте путем использования множества электрических сигналов. Контроллер длин волн переключает длину волны импульсного света на вторую длину волны до получения всех электрических сигналов соответствующих первой длине волны. Использование изобретения повышает надежность и точность. 9 з.п. ф-лы, 21 ил. 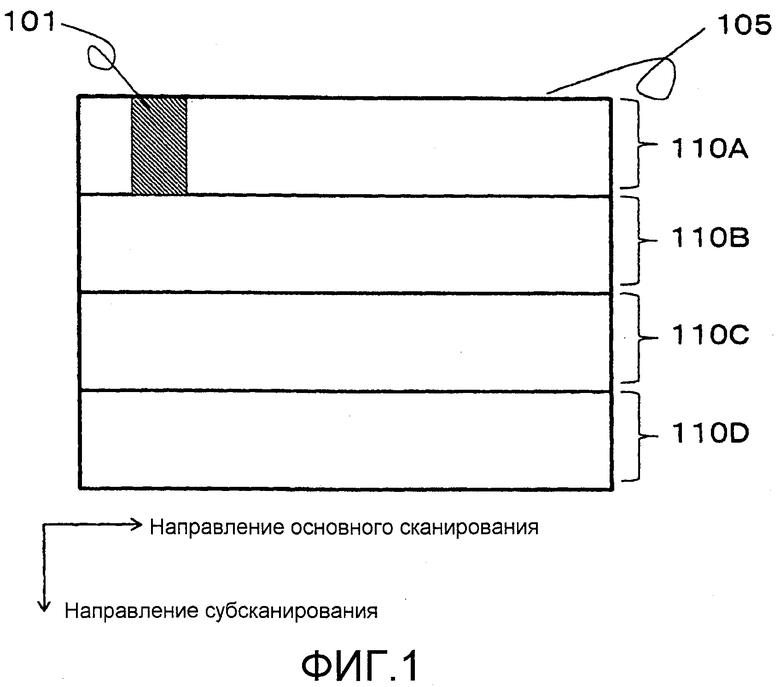
1. Устройство для получения информации об объекте, содержащее:
источник света, выполненный с возможностью излучения импульсного света с множеством длин волн;
контроллер длин волн, выполненный с возможностью переключения длины волны импульсного света между первой длиной волны и второй длиной волны, отличной от первой длины волны;
зонд, выполненный с возможностью приема акустической волны, формируемой в объекте, который облучают импульсным светом, излучаемым из источника света;
контроллер сканирования, выполненный с возможностью перемещения зонда в пределах заданного диапазона сканирования; и
процессор данных, выполненный с возможностью получения информации об объекте путем использования множества электрических сигналов, соответствующих указанным длинам волн импульсного света, выдаваемых зондом в каждом положении приема в диапазоне сканирования;
при этом контроллер длин волн переключает длину волны импульсного света на вторую длину волны до получения всех электрических сигналов, соответствующих первой длине волны.
2. Устройство для получения информации об объекте по п. 1, в котором контроллер сканирования позволяет зонду принимать акустическую волну в пределах диапазона сканирования посредством перемещения зонда в направлении основного сканирования и направлении субсканирования, пересекающем направление основного сканирования, при этом направление основного сканирования является направлением, в котором зонд перемещается по мере приема акустической волны в каждом положении приема.
3. Устройство для получения информации об объекте по п. 2, в котором диапазон сканирования разбит на множество частичных областей в направлении субсканирования, и при этом после того, как зонд принимает акустическую волну, соответствующую импульсному свету с первой длиной волны, в каждом положении приема в по меньшей мере одной частичной области, но до того, как зонд принимает акустическую волну в других частичных областях, контроллер длин волн переключает длину волны импульсного света на вторую длину волны, отличную от первой длины волны.
4. Устройство для получения информации об объекте по п. 3, в котором частичные области соответствуют траекториям сканирования, которым следуют, когда зонд перемещается по мере приема акустической волны в каждом положении приема, в направлении основного сканирования в пределах диапазона сканирования, при этом контроллер сканирования перемещает зонд множество раз в пределах частичной области, и причем контроллер длин волн переключает длину волны импульсного света таким образом, чтобы каждый раз, когда зонд перемещается таким образом, излучался импульсный свет с отличающейся длиной волны.
5. Устройство для получения информации об объекте по п. 3, в котором частичные области соответствуют траекториям сканирования, которым следуют, когда зонд перемещается по мере приема акустической волны в каждом положении приема, в направлении основного сканирования в пределах диапазона сканирования, и при этом контроллер длин волн переключает длину волны импульсного света в то время, как зонд перемещается в направлении основного сканирования в частичных областях.
6. Устройство для получения информации об объекте по п. 5, в котором контроллер длин волн переключает длину волны импульсного света каждый раз, когда излучается импульсный свет.
7. Устройство для получения информации об объекте по п. 1, в котором контроллер длин волн переключает длину волны импульсного света между двумя различными длинами волн.
8. Устройство для получения информации об объекте по п. 1, в котором контроллер длин волн дополнительно переключает длину волны импульсного света между тремя различными длинами волн.
9. Устройство для получения информации об объекте по п. 1, в котором источник света излучает импульсный свет, имеющий длину волны от 700 нм до 1100 нм.
10. Устройство для получения информации об объекте по любому из пп. 1-9, в котором процессор данных получает по меньшей мере одно из начального акустического давления акустической волны, плотности поглощенной световой энергии, коэффициента поглощения и информации, отражающей концентрации веществ.
| WO 2011096551 A1, 11.08.2011 | |||
| WO 2009154298 A1, 23.12.2009 | |||
| US 2010016717 A1, 21.01.2010 | |||
| WO 2009154244 A1, 23.12.2009 | |||
| Е.В.САВВАТЕЕВА и др | |||
| Лазерная оптоакустическая спектроскопия биотканей | |||
| СОВРЕМЕННЫЕ ЛАЗЕРНО-ИНФОРМАЦИОННЫЕ И ЛАЗЕРНЫЕ ТЕХНОЛОГИИ, Сборник трудов ИПЛИТ РАН, Интерконтакт Наука, 2005, сс | |||
| Переносная мусоросжигательная печь-снеготаялка | 1920 |
|
SU183A1 |

