Изобретение относится в целом к электрическим зубным щеткам, и, более конкретно, к приводному механизму электрической зубной щетки, использующему действие магнитного поля для создания колебательного движения выходного вала, имеющего выбранный угол движения и частоту.
Электрические зубные щетки часто выполняют с возможностью включать в себя резонансный приводной механизм для приведения в действие механической системы «пружина-масса», действие которой, в свою очередь, создает требуемое движение чистящей головки для очистки зубов пользователя. В резонансной системе приводная частота устройства устанавливается около или приблизительно равной резонансной частоте системы «пружина-масса». Резонансная система может обеспечить возможность работы устройства с максимальной эффективностью для данной входной мощности и поэтому является желательной для большинства устройств, включая электрические зубные щетки.
Полный размер приводного механизма, а также срок службы устройства являются важными, но иногда несовместимыми соображениями в конструкции электрической зубной щетки. Попытка уменьшить размер приводного механизма и, следовательно, размер устройства, например, которая в целом желательна, часто будет иметь отрицательное влияние в целом на функцию и эффективность устройства, а также потенциально уменьшает срок службы устройства, поскольку уменьшение размера резонансной пружины в целом увеличивает механическое напряжение на пружине, приводя к более скорой поломке, а также снижает выходную мощность устройства.
Изобретение, раскрытое в настоящем документе, содержит приводной механизм для электрической зубной щетки относительно небольшого диаметра, который не оказывает влияния на функцию и эффективность зубной щетки и/или срок службы.
Раскрыта система магнитного приводного механизма для электрической зубной щетки, содержащая: корпус; стержень из намагничиваемого материала, проходящий через корпус; по меньшей мере, одну пару расположенных на расстоянии друг от друга сборок постоянных магнитов, зафиксированных в определенном положении в корпусе, при этом каждая сборка постоянного магнита содержит множество магнитных секций «северный полюс»/«южный полюс»; катушечную обмотку, окружающую стержень в промежутке между сборками постоянных магнитов; пару сборок магнитных полюсов, имеющую множество элементов магнитных полюсов, прикрепленных к стержню, расположенному внутри объема, окруженного сборками постоянных магнитов, при этом магнитные полюсы проходят радиально наружу от стержня в направлении сборок постоянных магнитов; причем при работе возбуждающий сигнал в виде прямоугольного импульса вокруг нуля или переменный ток от его источника подается на катушечные обмотки, приводя к колебательному движению стержня с выбранной частотой и углом, и при этом стержень выполнен с возможностью приема сборки чистящей головки, или сборки пружины, выполненной с возможностью приема сборки чистящей головки, для очистки зубов пользователя.
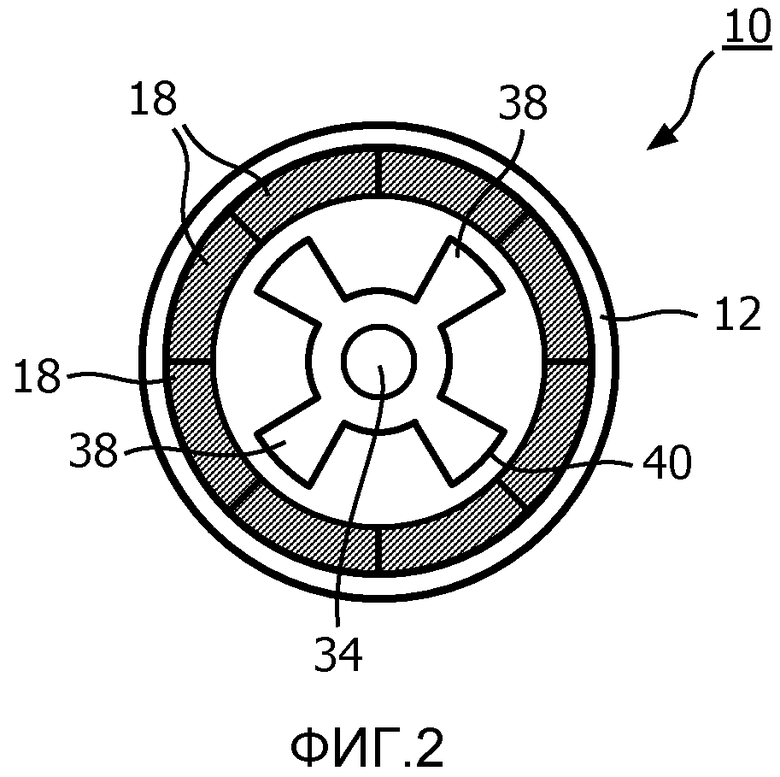
Фиг. 1 и 2 представляют собой виды продольного и поперечного сечения одного варианта осуществления приводного механизма, описанного в настоящем документе, для вращательного действия стержня приводного механизма.
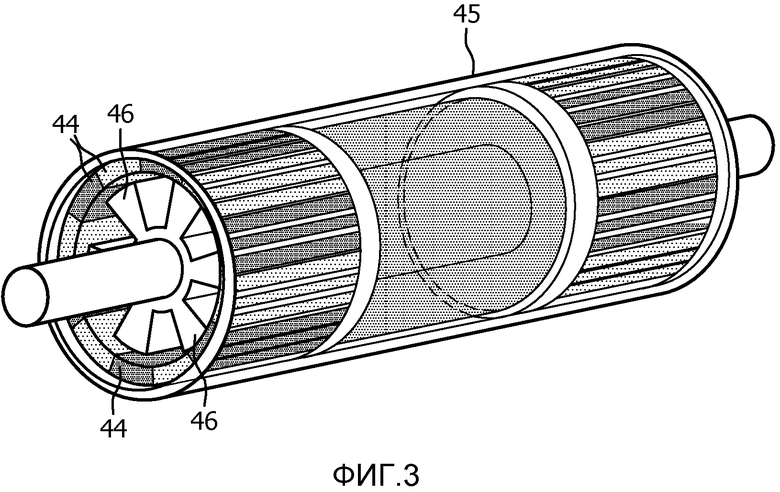
Фиг. 3 представляет собой общий вид другого варианта осуществления приводного механизма.
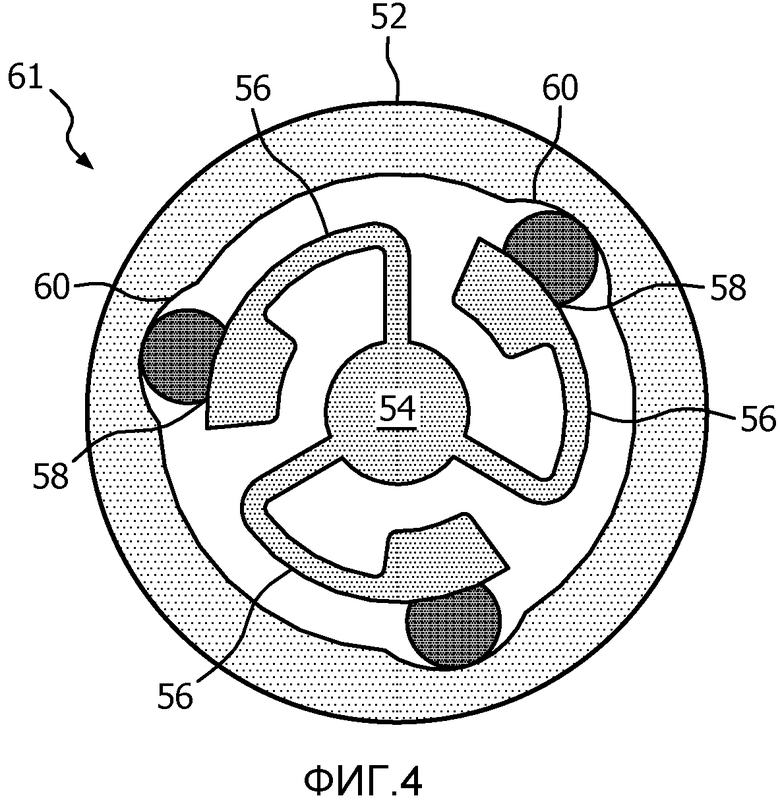
Фиг. 4 - вид с торца колоколообразной пружины, которая может использоваться с приводным механизмом, изображенным на фиг. 3.
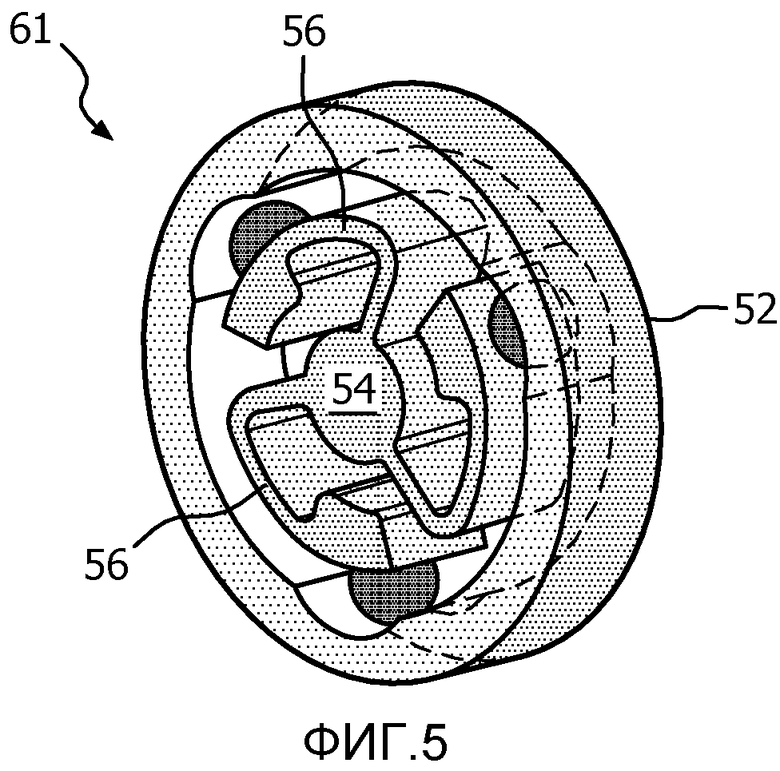
Фиг. 5 - общий вид колоколообразной пружины, изображенной на фиг. 4.
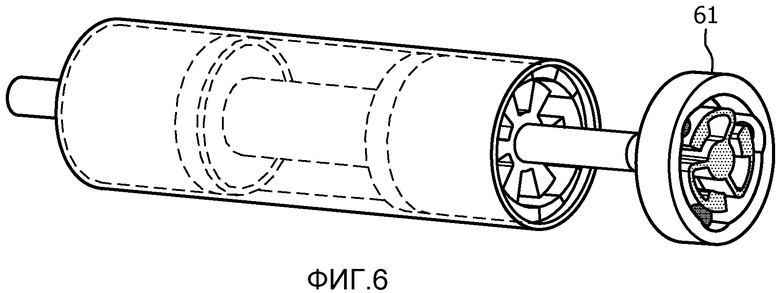
Фиг. 6 - общий вид сочетания приводного механизма/колоколообразной пружины.
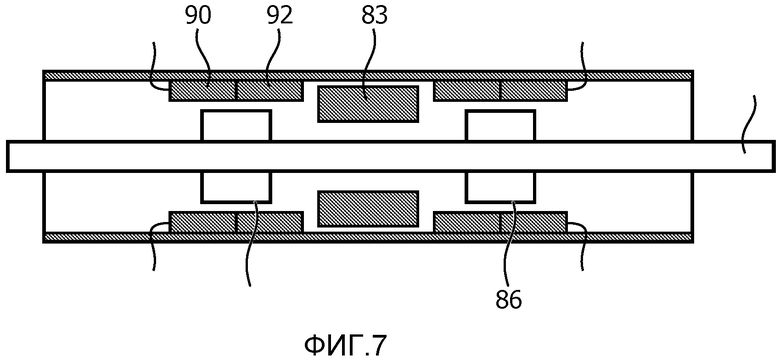
Фиг. 7-9 - виды продольного сечения дополнительных вариантов осуществления приводного механизма, для осевого движения стержня приводного механизма.
Фиг. 10 - вид продольного сечения приводного механизма, обладающего возможностью создавать как осевое, так и тангенциальное движение стержня приводного механизма.
Фиг. 11 - блок-схема компоновки измерительной катушки/обратной связи для управления угловым движением/ходом системы приводного механизма.
На фиг. 1 и 2 представлен первый вариант осуществления приводного механизма 10, который может быть использован для приведения в действие электрической зубной щетки с колебательно-вращательным действием на выбранный угол. Приводной механизм 10 включает в себя удлиненный, цилиндрический корпус 12, который предпочтительно, но необязательно, имеет небольшой, то есть тонкий, диаметр, приблизительно 12-15 мм, при этом предпочтительный диаметр составляет 13,6 мм в представленном варианте осуществления. Такой тонкий корпус приводного механизма является коммерчески целесообразным, и конструкция приводного механизма, описанного в настоящем документе, делает такую тонкую конфигурацию возможной.
В представленном варианте осуществления внутри корпуса 12, предпочтительно изготовленного из металла, обладающего высокой магнитной проницаемостью, поскольку корпус является частью магнитной цепи, расположены две сборки 14 и 16 постоянных магнитов, расположенные вблизи противоположных концов корпуса 12, прикрепленные к внутренней поверхности 15 корпуса 12. Сборки постоянных магнитов содержат магнитные секции 18-18, чередующиеся по периметру между северной/южной полярностью. В представленном варианте осуществления магнитные секции 18-18 изогнуты, приблизительно 10 мм в длину и 8 мм в толщину. В представленном на фиг. 1 и 2 варианте осуществления в каждой магнитной сборке имеются всего восемь магнитных секций. Хотя вариант осуществления, представленный на фиг. 1 и 2, показывает соединение отдельных магнитных секций впритык, может существовать зазор между следующими одна за другой северной/южной магнитными секциями. Сборка 16 постоянного магнита идентична сборке 14 постоянного магнита, за исключением того, что магнитные секции сборки 16 расположены так, что магнитные полюсы чередуются противоположно тому, как чередуются магнитные секции сборки 14, то есть в продольном направлении северная полярность магнитной секции в сборке 14 находится в соответствии с южной полярностью магнитной секции в сборке 16.
Через середину корпуса 12 проходит стержень 22. Вокруг стержня 22 между сборками 14 и 16 постоянных магнитов намотана цилиндрическая обмотка 24, которая в представленном варианте осуществления содержит катушку из медной проволоки, при этом количество витков зависит от нескольких факторов, включающих в себя напряжение батареи, требуемую выходную мощность и размер приводного механизма. В представленном варианте осуществления обмотка 24 имеет длину приблизительно 16 мм и толщину приблизительно 2-3 мм. Стержень имеет диаметр приблизительно 4 мм в области катушечной обмотки 24, и 2-3 мм в области сборок 14 и 16 постоянных магнитов.
Приводной механизм 10 также включает в себя две сборки 28 и 30 магнитных полюсов. Сборки магнитных полюсов прикреплены к стержню 22 и расположены, соответственно, в областях, ограниченных сборками 14 и 16 постоянных магнитов. И сборки магнитных полюсов, и стержень изготовлены из магнитного материала, например железа. В представленном варианте осуществления каждая сборка магнитных полюсов включает в себя кольцевой участок 34, прилегающий к стержню, и множество расположенных на равных промежутках друг от друга полюсных элементов 38. Каждый полюсный элемент немного увеличивается в ширину от кольцевого участка 34 к свободному концу полюсного элемента. Свободные концы полюсных элементов проходят почти до магнитных секций. Обычно между ними существует небольшой зазор. В представленном варианте осуществления поверхность 40 свободного конца каждого полюсного элемента немного искривлена. Количество полюсных элементов 38 в сборке магнитных полюсов будет составлять половину количества отдельных магнитных секций в связанной сборке постоянных магнитов.
Вариант осуществления, представленный на фиг. 1 и 2, как было указано выше, демонстрирует всего восемь магнитных секций в каждой сборке постоянных магнитов и четыре расположенных на равных промежутках друг от друга полюсных элемента в каждой сборке магнитных полюсов. Однако, в других вариантах осуществления количество магнитных секций, и, таким образом, количество полюсных элементов в сборках магнитных полюсов будет различным. На фиг. 3, например, представлена компоновка всего с 12 магнитными секциями 44 для каждой сборки постоянных магнитов на внутренней поверхности корпуса 45, при этом секции северного и южного полюсов чередуются по внутреннему периметру сборок постоянных магнитов. В варианте осуществления, представленном на фиг. 3, имеется всего шесть расположенных на равных промежутках друг от друга полюсных элементов 46, что соответствует 12 северным/южным магнитным секциям магнитов. Как указано выше, количество магнитных секций, которое может быть различным, будет также определять количество магнитных полюсов, содержащих сборки магнитных полюсов.
Возбуждающий сигнал от его источника 25 для работы приводного механизма подается на обмотку 24 посредством проводов обмотки (не показаны). При работе, как изображено на фиг. 1 и 2, возбуждающий сигнал обычно является сигналом прямоугольной формы волны (переменным) вокруг нуля, созданным за счет мостовой схемы из сигнала постоянного тока, хотя может также использоваться сигнал переменного тока. Частота сигнала может быть различной, хотя предпочтительно она близка резонансной частоте системы. Половина прямоугольного возбуждающего сигнала, имеющего положительное значение, приводит к намагничиванию одной из сборок магнитных полюсов в качестве северного полюса, а другая сборка магнитных полюсов намагничивается в качестве южного полюса. В ненамагниченном состоянии каждый из отдельных полюсных элементов будет обращен к границе «север/юг» секций постоянных магнитов в направлении по окружности сборок постоянных магнитов.
Возбуждающий сигнал приводит к тому, что стержень 22 с двумя сборками магнитных полюсов поворачивается до приблизительно средней точки одной из соседних магнитных секций. Например, если сборка 28 магнитных полюсов, изображенная на фиг. 1 и 2, намагничена в качестве северной, а другая сборка 30 является южной, первым действием будет поворот стержня против часовой стрелки (фиг. 2), так что северные магнитные полюсы в сборке 28 обращаются к южным магнитным секциям за счет магнитного притяжения, и отталкиваются от северных магнитных секций. Южная сборка 30 магнитных полюсов будет создавать такой же поворот против часовой стрелки, из-за дополняющего (противоположного) положения секций постоянных магнитов из сборки 16 постоянных магнитов. Возбуждающий прямоугольный импульс возвращается к нулю и затем принимает отрицательное значение, приводя к повороту стержня в направлении по часовой стрелке, при этом сборка 28 магнитных полюсов будет южной, а сборка 30 магнитных полюсов будет северной. Полюсы в сборке 28 будут перемещаться, чтобы быть обращенными к северным секциям постоянного магнита в сборке 14, а полюсы в сборке 30 перемещаются, чтобы быть обращенными к южным секциям постоянного магнита в сборке 16.
Повторяющийся прямоугольный импульс в обоих направлениях вокруг нуля приведет к возвратно-поступательному колебанию стержня 22 на угол, который зависит от количества секций постоянных магнитов и соответствующего количества элементов магнитных полюсов. Например, в варианте осуществления, когда в каждой сборке постоянных магнитов имеется всего 12 магнитных секций, угол колебания составит теоретически приблизительно +15°, в действительности немного меньше, что является эффективным чистящим ходом для очистки зубов. Подходящий диапазон может составлять 9-16°.
При работе приводной механизм имеет предпочтительные магнитные положения. Пользователь может поворачивать чистящий стержень в предпочтительное исходное (нерабочее) угловое положение. Стержень приводного механизма может быть расположен в нескольких различных положениях. Магнитный зубцовый момент становится отрицательным для положительного поворота стержня и положительным для отрицательного поворота. Зубцовый момент, таким образом, может использоваться для выполнения функции пружины. В таком случае механические пружины могут быть исключены, поскольку функция пружины обеспечивается за счет возникновения магнитного зубцового момента, фактически магнитной пружины.
В одной компоновке чистящая головка может прикрепляться непосредственно к одному концу стержня, для создания эффективного чистящего действия, при этом магнитной пружины достаточно для выполнения требуемого действия. В других случаях действие магнитной пружины приводного механизма может не быть сильным настолько, чтобы создавать эффективную чистящую силу. В таких случаях стержень приводного механизма может использоваться для приведения в действие отдельной механической системы «пружина-масса».
Такая отдельная система «пружина-масса» может включать в себя пластинчатую или винтовую пружину, которые являются традиционными компоновками «пружина-масса», или сборку 61 колоколообразной пружины, такую как представлена на фиг. 4 и 5. На фиг. 6 представлена компоновка колоколообразной пружины, изображенной на фиг. 4 и 5, в сочетании с приводным механизмом, изображенным на фиг. 3. Сборка колоколообразной пружины включает в себя узкий, кольцеобразный наружный статорный участок 52, который в представленном варианте осуществления имеет такой же наружный диаметр, что и корпус 12. Толщина наружного участка может быть различной. Сборка 61 колоколообразной пружины также включает в себя внутреннюю подвижную часть, которая включает в себя центральный элемент 54, прикрепленный к стержню или являющийся частью стержня от приводного механизма. Кнаружи центрального элемента 54 отходит множество лопастей 56. Количество лопастей, предпочтительно расположенных с равными промежутками, может быть различным, при этом три лопасти обеспечивают надежные и эффективные результаты. Каждая лопасть проходит непосредственно наружу в направлении наружного участка 52 от центрального элемента 54 и затем изгибается, чтобы следовать изогнутой внутренней поверхности наружного участка 52. На конце каждой лопасти имеется полостной участок 58, который совмещен с неглубокой полостью или углублением 60 во внутренней поверхности наружного участка. Между каждой полостью 58 и каждой полостью/углублением 60 находятся небольшие шарики. Лопасти подвижной части создают предварительное напряжение. Эта конкретная компоновка может действовать как пружина и в тангенциальном, и в осевом направлениях.
На фиг. 7 представлен приводной механизм, обладающий осевым движением, вместо вращательного движения вышеуказанных вариантов осуществления. Он включает в себя две расположенные на расстоянии друг от друга сборки 78 и 80 постоянных магнитов, стержень 82 и катушечную обмотку 83 между ними, и две сборки 84 и 86 магнитных полюсов, прикрепленные к стержню 82, внутри сборок постоянных магнитов. Сборки постоянных магнитов расположены по оси (по периметру), в которой северная/южная границы магнитных секций проходят по периметру, а не продольно, как в случае поворотного приводного механизма. Например, сборка 78 постоянного магнита включает в себя магнитную секцию 90 северного полюса и соседнюю магнитную секцию 92 южного полюса. В представленном варианте осуществления магнитные секции 90 и 92 проходят по периметру вокруг всего корпуса, и, как магнитные секции 44, имеют толщину приблизительно 1 мм. Возможно, что магнитные секции могут быть сегментированы по периметру, то есть имеется множество магнитных секций. Отдельные магнитные сегменты могут или примыкать друг к другу, или могут быть разделены небольшим зазором.
Другая сборка 80 постоянного магнита аналогична по компоновке, за исключением того, что секции северного и южного полюсов поменялись местами, так, чтобы северные магнитные секции обоих сборок постоянных магнитов находились в наружном позиции, а южные магнитные секции находились во внутреннем положении, как представлено на фиг. 7.
Сборки магнитных полюсов в варианте осуществления, представленном на фиг. 7, могут представлять собой один целый дискообразный элемент, или это может быть последовательность отдельных полюсов, разделенных промежутками. Хотя каждая сборка постоянного магнита, представленная на фиг. 7, имеет одну северную и одну южную секцию, их может быть большее количество секций, чем только одна северная и одна южная полюсная секция, расположенных на расстоянии друг от друга в продольном направлении вдоль корпуса.
При работе приводного механизма с осевым перемещением возбуждение обмотки 83 прямоугольным импульсом, имеющим положительный и отрицательный участки, или сигналом переменного тока будет, например, намагничивать сборку 84 магнитных полюсов в качестве северного полюса, а противоположную сборку 86 магнитных полюсов - в качестве южного полюса. Это приведет к перемещению стержня 82 первоначально влево (по оси), когда магнитные полюсы 84 и 86 будут стремиться выстроиться в линию с противоположной полюсной секцией сборки постоянного магнита. Когда возбуждающий сигнал меняет знак, стержень 82 перемещается сначала обратно в нейтральное положение и затем вправо, когда сборка 84 магнитных полюсов намагничена в качестве южной, то противоположная сборка 86 магнитных полюсов намагничивается в качестве северной. При последующей подаче возбуждающего сигнала стержень будет перемещаться возвратно-поступательно в продольном направлении (по оси) вдоль корпуса.
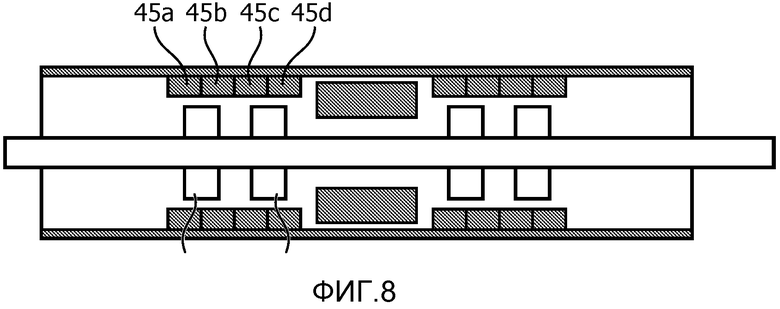
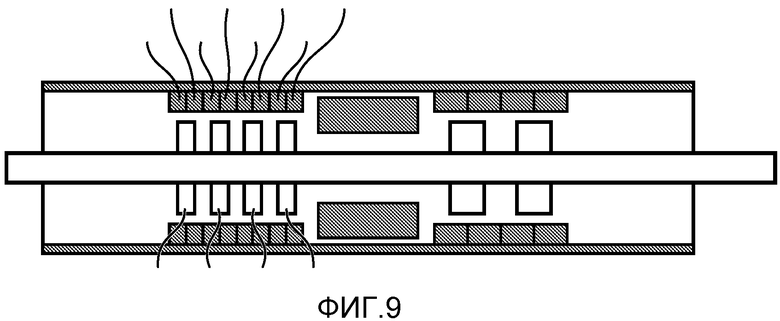
В случае, когда имеются дополнительные магнитные секции «север-юг», сборки магнитных полюсов включают в себя последовательность отдельных элементов магнитного полюса, расположенных с промежутками для совпадения в продольном направлении с примыкающими северными/южными линиями магнитных секций. На фиг. 8 и 9 представлены две такие компоновки.
На фиг. 8 представлен вариант осуществления, который создает относительно небольшой осевой (продольный) ход. Имеются два полюсных элемента для каждой магнитной сборки, которые включают в себя четыре кольцевые магнитные секции. Для простоты иллюстрации полюсные элементы 43a-43b показаны расположенными относительно одной магнитной сборки с магнитными секциями 45a-45d. Ширина каждого полюсного элемента составляет половину от ширины полюсного элемента в варианте осуществления, изображенном на фиг. 7. Рабочий диапазон сократился в два раза, при этом сила приводного механизма удвоилась.
На фиг. 9 представлен вариант осуществления для осевого перемещения с четырьмя полюсными элементами для каждой магнитной сборки, и всего восьмью отдельными кольцевыми магнитными секциями. Для одной магнитной сборки для иллюстрации четыре полюсных элементов помечены позициями 47a-47d, а восемь магнитных секций помечены позициями 49a-49h. Диапазон приводного механизма дополнительно уменьшается еще в два раза, и сила приводного механизма дополнительно увеличивается в два раза по сравнению с вариантом осуществления, представленным на фиг. 8. Как и в других вариантах осуществления, количество полюсных элементов составляет половину количества магнитных секций.
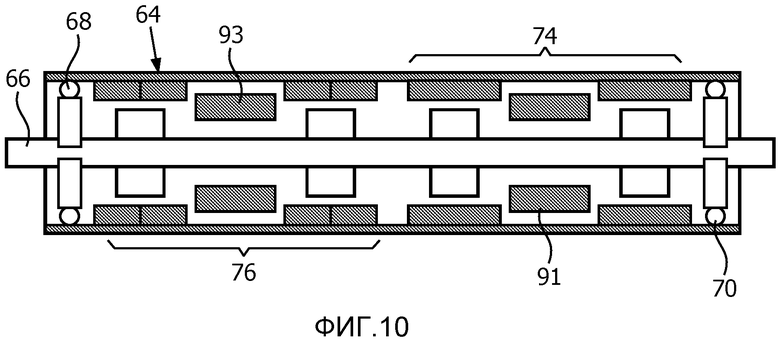
На фиг. 10 представлена конфигурация приводного механизма, обеспечивающая возможность создания и осевого, и вращательного перемещения стержня. Она включает в себя корпус 64, центральный стержень 66 и сборки 68 и 70 колоколообразной пружины, аналогичные представленным на фиг. 4 и 5, на обоих концах корпуса. Участок приводного механизма, обозначенный условным обозначением 74, создает вращательное перемещение и идентичен представленному на фиг. 1 и 2. Участок приводного механизма, обозначенный условным обозначением 76, создает осевое перемещение и идентичен представленному на фиг. 7.
Возбуждающий сигнал, поданный на обмотку 91 участка 74 приводного механизма, создает вращательное перемещение (подобно описанному выше для фиг. 1 и 2). Участок 76 приводного механизма может возбуждаться сигналом, подаваемым на обмотку 93, который полностью отделен от сигнала, приложенного к участку 74 приводного механизма, что обычно является предпочтительным, или сигнал может быть тем же. Эта компоновка будет создавать осевое перемещение чистящей головки, а также поворотное перемещение щетки. Дополнительно, использование различных частот для возбуждающих сигналов для двух участков приводного механизма создает различные чистящие схемы.
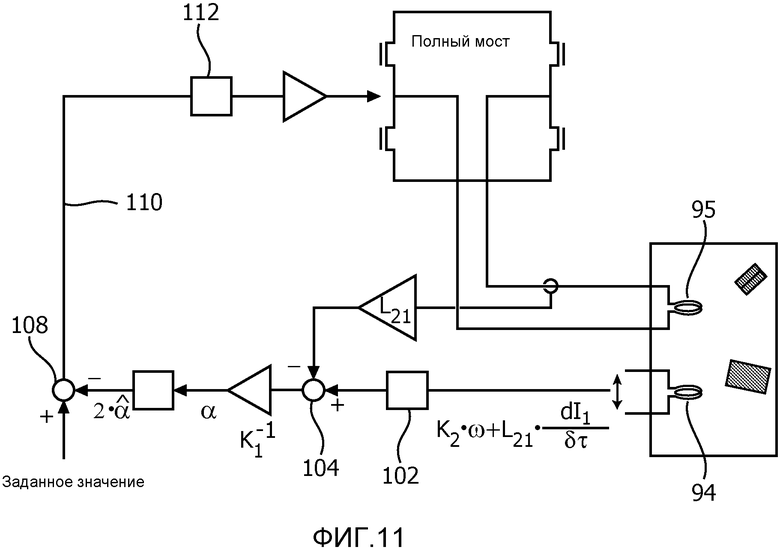
Приводной механизм, описанный в настоящем документе, может также включать в себя систему управления для стабилизации хода чистящей головки. В этой компоновке, как указано на фиг. 11, приводной механизм включает в себя измерительную катушку 94 в дополнение к катушке 95 приводного механизма. При работе измерительная катушка принимает магнитный поток, наведенный от сборок постоянных магнитов. Поток, созданный постоянными магнитами, будет различным, в зависимости от положения стержня. Наведенный поток в измерительной катушке 94 создает напряжение, которое имеет отношение к скорости подвижной части приводного механизма при ходе.
Напряжение также содержит составляющие, которые вызывает взаимодействие измерительной катушки и катушки приводного механизма, которые в целом действуют как двухобмоточный трансформатор. Для получения точной информации о ходе (угловая скорость) нежелательная составляющая должна быть исключена. Если ток в измерительной катушке 94 равен нулю, тогда напряжение будет состоять из напряжения противо-эдс катушки приводного механизма и напряжения трансформатора согласно следующей формуле:
где K2 представляет собой постоянную приводного механизма в измерительной катушке, а L21 представляет собой взаимную проводимость между измерительной катушкой и обмоткой приводного механизма. Величина 

Соответственно, раскрыт приводной механизм, подходящий для использования в электрической зубной щетке. Конструкция приводного механизма имеет значительные преимущества, поскольку обеспечивает небольшое устройство, которое имеет требуемое небольшое, то есть тонкое поперечное сечение, без потери эффективности и срока службы изделия.
Хотя предпочтительный вариант осуществления изобретения раскрыт с целью иллюстрации, следует понимать, что различные изменения, модификации и замены могут быть включены в вариант осуществления без отступления от смысла изобретения, ограниченного приведенной ниже формулой.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРИЧЕСКАЯ ЗУБНАЯ ЩЕТКА С СИЛОВЫМ ПРИВОДОМ, РАСПОЛОЖЕННЫМ В ГОЛОВКЕ ЩЕТКИ | 2010 |
|
RU2550430C2 |
| СИСТЕМА УСТАНОВКИ ДВИГАТЕЛЯ В ПОДВЕШЕННОМ СОСТОЯНИИ В ПРИВОДНОЙ ЗУБНОЙ ЩЕТКЕ | 2015 |
|
RU2663644C2 |
| КОЛЛЕКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ПОЛЮСНЫМ ЯКОРЕМ | 2009 |
|
RU2390088C1 |
| ЯВНОПОЛЮСНАЯ КОЛЛЕКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2010 |
|
RU2414797C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ МОДУЛЬНЫЙ АМОРТИЗАТОР МОНТАЖНОЙ ОПОРЫ ДВИГАТЕЛЯ | 2015 |
|
RU2676455C2 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ ДЛЯ УСТРОЙСТВА ИНДИВИДУАЛЬНОГО УХОДА, ИМЕЮЩИЙ СГРУППИРОВАННЫЕ МАГНИТЫ | 2014 |
|
RU2677829C2 |
| ИНСТРУМЕНТ С ЭЛЕКТРИЧЕСКИМ ПРИВОДОМ | 2005 |
|
RU2372184C2 |
| ЯВНОПОЛЮСНЫЙ КОЛЛЕКТОРНЫЙ ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 2010 |
|
RU2414796C1 |
| КОЛЛЕКТОРНЫЙ ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ С ПОЛЮСНЫМ ЯКОРЕМ | 2009 |
|
RU2390087C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА С ДВУХПАКЕТНЫМ ИНДУКТОРОМ (ВАРИАНТЫ) | 2008 |
|
RU2356154C1 |
Изобретение относится к электротехнике, к приводам электрических зубных щеток, использующих магнитное поле для создания колебательного движения выходного вала, имеющего выбранный угол движения и частоту. Технический результат состоит в уменьшении габаритов электропривода. Система магнитного приводного механизма включает корпус (10) и стержень (22), проходящий через корпус, выполненный из намагничиваемого материала, такого как железо. Приводной механизм дополнительно содержит пару сборок (14, 16) постоянных магнитов, расположенных неподвижно внутри корпуса, с промежутком между ними в продольном направлении. Сборки постоянных магнитов содержат чередующееся множество магнитных секций (18) «северный полюс»/«южный полюс», проходящих продольно или по периметру приводного механизма. Приводной механизм дополнительно включает катушечную обмотку (24), окружающую стержень, расположенную между двумя сборками постоянных магнитов. Сборки (28, 30) магнитных полюсов, прикрепленные к стержню, расположены внутри объема, окруженного сборками постоянных магнитов, так что переменный приводной сигнал вызывает колебательное движение стержня требуемой частоты и амплитуды. 12 з.п. ф-лы, 11 ил.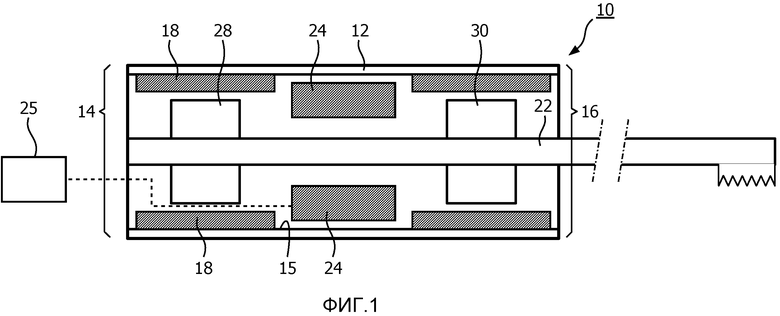
1. Система магнитного приводного механизма для электрической зубной щетки, содержащая:
корпус (10);
стержень (22) из намагничиваемого материала, проходящий через корпус;
по меньшей мере, одну пару расположенных на расстоянии друг от друга сборок (14, 16) постоянных магнитов, зафиксированных в корпусе, при этом каждая сборка постоянного магнита содержит множество магнитных секций (18) «северный полюс»/«южный полюс», при этом магнитные секции «северный полюс»/«южный полюс» одной сборки постоянного магнита расположены напротив магнитных секций «северный полюс»/«южный полюс» другой сборки постоянного магнита;
катушечную обмотку (24), окружающую стержень в промежутке между сборками постоянных магнитов;
пару расположенных на расстоянии друг от друга сборок (28,30) магнитных полюсов, каждая из которых имеет множество элементов (38) магнитных полюсов, прикрепленных к стержню, расположенных внутри объема, ограниченного сборками постоянных магнитов, при этом элементы магнитных полюсов проходят радиально наружу от стержня в направлении сборок постоянных магнитов, причем одна сборка магнитного полюса намагничена в качестве «северной», а другая сборка магнитного полюса намагничена в качестве «южной»;
при этом при работе возбуждающий сигнал в виде прямоугольного импульса вокруг нуля или переменного тока от его источника (25) подается на катушечные обмотки, приводя к магнитному взаимодействию между сборками магнитной катушки и находящимися на расстоянии друг от друга сборками постоянных магнитов, что обеспечивает колебательное движение стержня при выбранной частоте и угле, и при этом стержень выполнен с возможностью приема сборки чистящей головки или сборки пружины, выполненной с возможностью приема сборки чистящей головки, для очистки зубов пользователя.
2. Система приводного механизма по п. 1, включающая в себя колоколообразную пружину (61), прикрепленную к стержню или являющуюся частью стержня.
3. Система приводного механизма по п. 1, в которой приводной механизм выполнен с возможностью функционирования при работе в качестве магнитной пружины благодаря зубцовому моменту приводного механизма.
4. Система приводного механизма по п. 1, в которой магнитные секции «северный полюс»/«южный полюс» чередуются по периметру вокруг внутреннего пространства корпуса.
5. Система приводного механизма по п. 1, в которой магнитные секции «северный полюс»/«южный полюс» чередуются в продольном направлении вдоль корпуса.
6. Система приводного механизма по п. 1, включающая в себя два набора (74, 76), по меньшей мере, из одной пары сборок постоянных магнитов, при этом магнитные секции «северный полюс»/«южный полюс» в одном наборе сборок постоянных магнитов чередуются по периметру вокруг внутреннего пространства корпуса и при этом магнитные секции «северный полюс»/«южный полюс» в другом наборе чередуются в продольном направлении вдоль корпуса.
7. Система приводного механизма по п. 4, в которой каждая сборка постоянного магнита включает в себя, по меньшей мере, восемь магнитных секций, имеющих чередующиеся северные и южные полюсы, и при этом каждая сборка магнитных полюсов содержит центральную секцию и в два раза меньшее количество расположенных на равных промежутках друг от друга элементов магнитных полюсов по сравнению с количеством магнитных секций, отходящих от них наружу.
8. Система приводного механизма по п. 5, в которой каждая сборка постоянного магнита включает в себя по меньшей мере четыре магнитных секции, имеющих чередующиеся северные и южные полюсы, и вдвое меньшее количество элементов магнитных полюсов, по сравнению с количеством магнитных секций, расположенных на расстоянии друг от друга вдоль стержня внутри объема, окруженного сборками постоянных магнитов.
9. Система приводного механизма по п. 1, в которой стержень и сборки магнитных полюсов изготовлены из железа.
10. Система приводного механизма по п. 1, в которой стержень имеет больший диаметр в том своем участке, который соответствует катушечной обмотке, чем в тех ее участках, которые соответствуют сборкам постоянных магнитов.
11. Система приводного механизма по п. 1, в котором корпус имеет диаметр, лежащий в диапазоне 12-15 мм.
12. Система приводного механизма по п. 1, в котором выбранный угол лежит в диапазоне 9-16°.
13. Система приводного механизма по п. 1, включающая в себя измерительную обмотку (94) вблизи катушечной обмотки (95), при этом перемещение сборок постоянных магнитов создает магнитный поток, который наводит напряжение в измерительной обмотке в зависимости от положения измерительной катушки относительно сборок постоянных магнитов, при этом система приводного механизма включает в себя сборку (102, 104, 108, 112) управления для обработки сигнала напряжения от измерительной обмотки для выделения напряжения, которое возникает только благодаря магнитному потоку от сборок постоянных магнитов, и для сравнения этого напряжения со стандартным значением, и для последующего изменения частоты или коэффициента заполнения приводного сигнала для создания хода стержня с требуемой амплитудой и/или углом.
| DE 10355446 A1, 30.06.2005 | |||
| DE 102006061381 A1, 26.06.2008 | |||
| EP 1626483 A1, 15,02,2006 | |||
| WO 2004047670 A1, 10.06.2004 | |||
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД И ЗУБНАЯ ЩЕТКА, В КОТОРОЙ ОН ИСПОЛЬЗУЕТСЯ | 2007 |
|
RU2371142C2 |

