Изобретение относится к сельскохозяйственному машиностроению и может быть использовано в устройствах для послеуборочной обработки зерновых культур.
Известно устройство, содержащее упруго подвешенный рабочий орган, привод рабочего органа в виде плоского линейного асинхронного электродвигателя с неподвижным индуктором и параллельно ему установленным ротором, являющимся рабочим органом [1].
Недостатком технического решения является низкая эффективность сепарирования из-за невозможности обеспечения сложного колебательного движения рабочего органа, что ограничивает возможности его применения в качестве сепарирующей машины.
Наиболее близким по технической сущности к предлагаемому устройству является сепарирующая машина, содержащая упруго подвешенный рабочий орган, привод рабочего органа в виде плоского линейного асинхронного электродвигателя с неподвижным индуктором, и параллельно ему, но перпендикулярно рабочему органу установленным ротором с возможностью перемещения перпендикулярно и параллельно продольной оси индуктора [2].
Недостатком технического решения является низкая эффективность сепарирования из-за низкой частоты колебаний рабочего органа в плоскости, перпендикулярной основным продольным колебаниям.
Цель изобретения - повышение эффективности сепарирования.
Цель достигается тем, что рабочий орган подвижен относительно ротора в плоскости, перпендикулярной продольной оси индуктора, и связан с ротором через направляющие штоки и упругие элементы.
Известно получение сложного колебательного движения рабочего органа технологического оборудования посредством применения плоского линейного асинхронного двигателя (ЛАД) и упругих накопителей энергии. Для этого ротор ЛАД устанавливается с необходимым на величину поперечных (перпендикулярных продольной оси индуктора) колебаний рабочего органа воздушным зазором относительно индуктора, а рабочий орган жестко соединен с ротором. В предлагаемом техническом решении рабочий орган подвижен относительно ротора в плоскости, перпендикулярной продольной оси индуктора, что позволяет рабочему органу в процессе продольных колебаний, обусловленных частотой включений индуктора, совершать колебания в плоскости, перпендикулярной продольной оси индуктора с частотой больше, чем продольные колебания. Таким образом, предлагаемое техническое решение позволит повысить эффективность сепарирования и имеет существенное отличие.
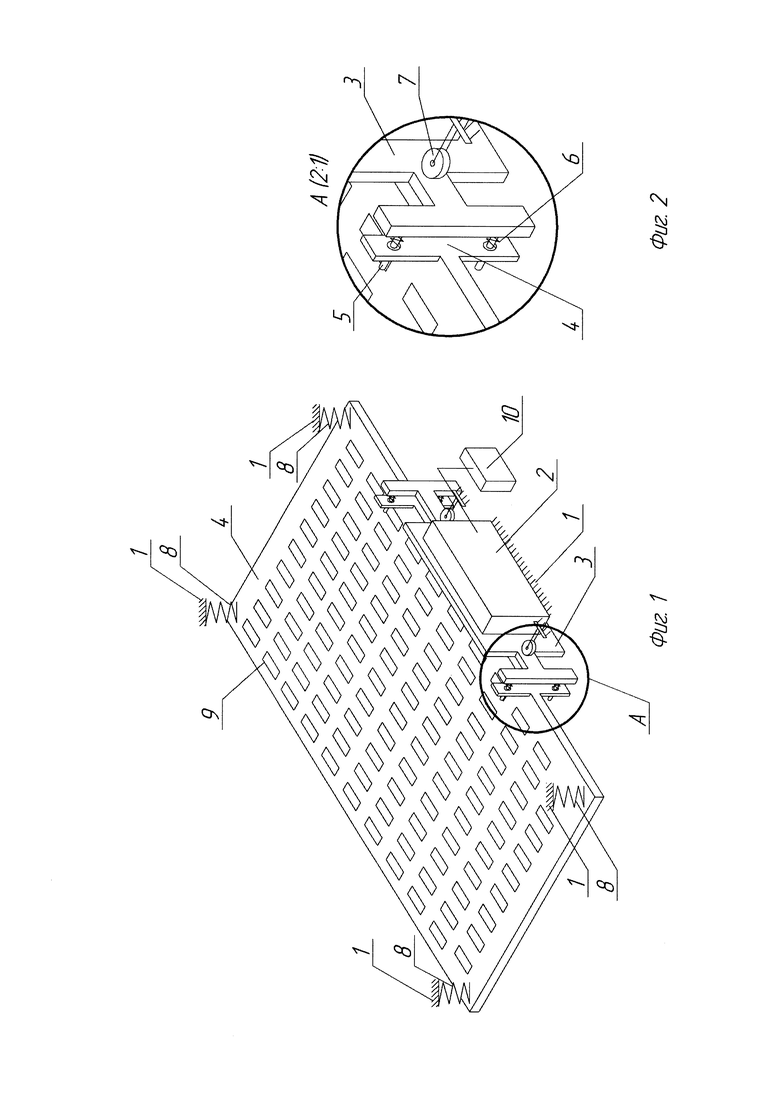
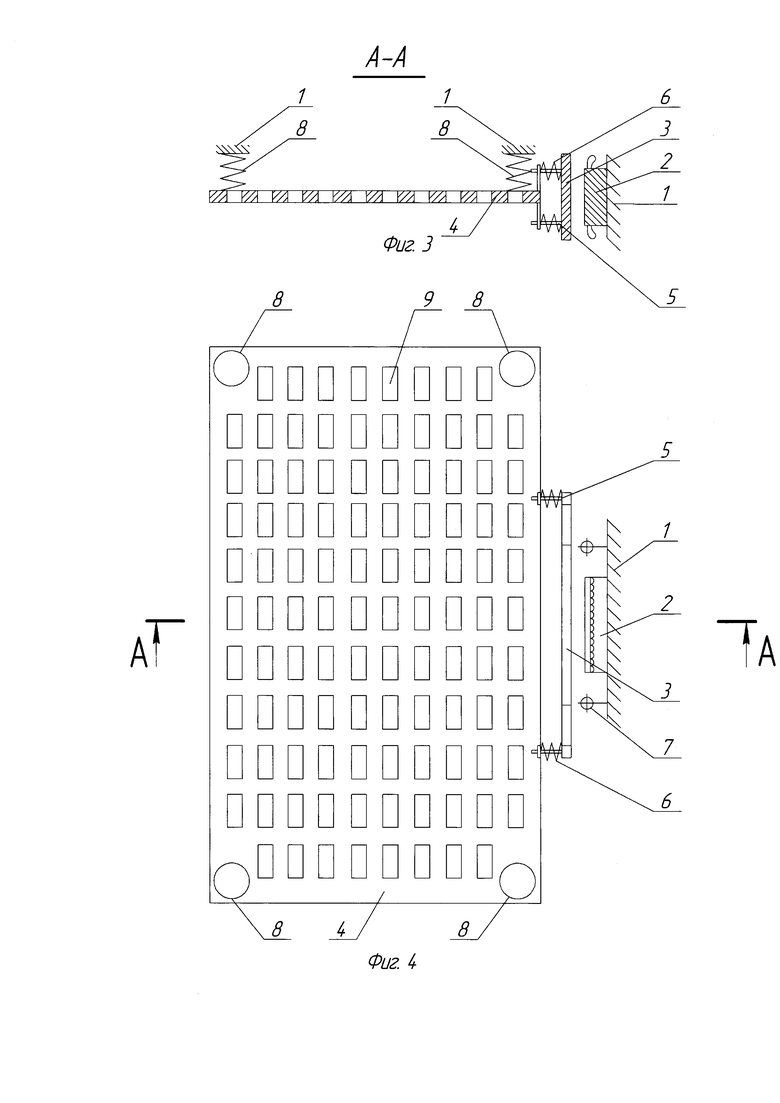
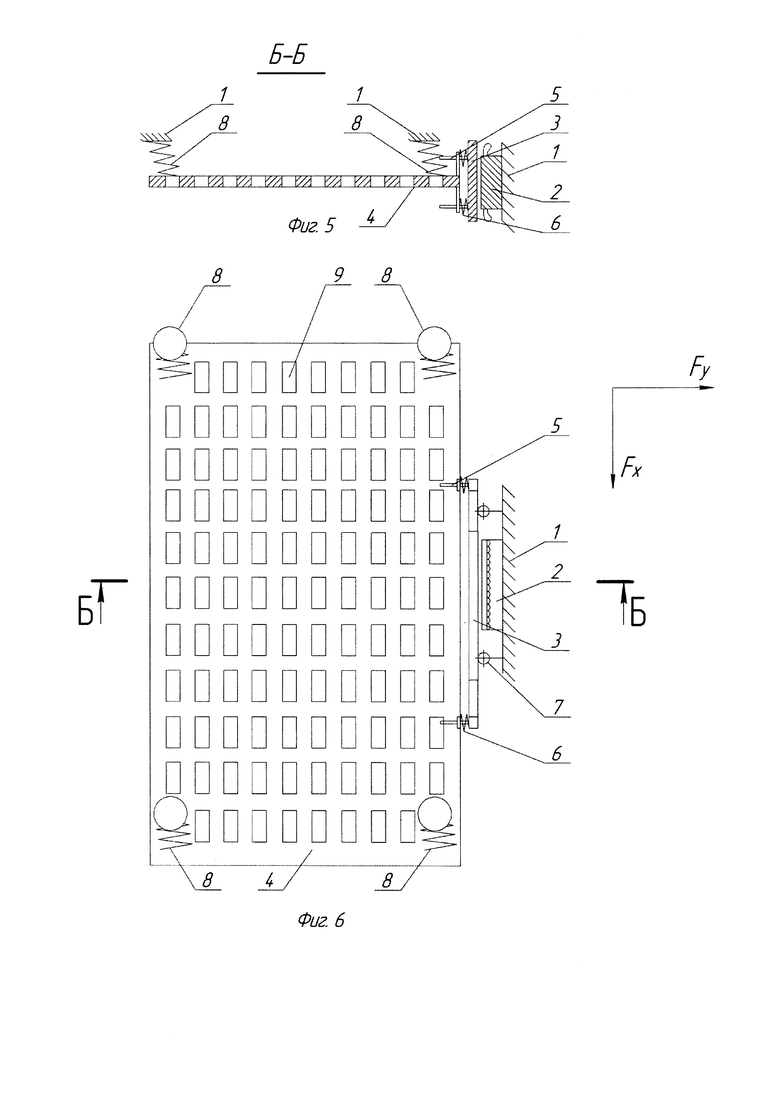
На фиг. 1 показана конструкция привода сепарирующей машины, на фиг. 2 показана одна из составных частей фиг. 1, на фиг. 3 и на фиг. 4 показано положение рабочего органа сепарирующей машины до подключения ЛАД к источнику питания, на фиг. 5 и фиг. 6 показано одно из возможных положений рабочего органа сепарирующей машины после подключения ЛАД к источнику питания.
Предлагаемое техническое решение содержит (фиг.1, фиг. 2): основание 1, привод рабочего органа 4 в виде плоского ЛАД с неподвижным индуктором 2 и параллельно ему, но перпендикулярно рабочему органу установленным ротором 3 с возможностью перемещения перпендикулярно и параллельно продольной оси индуктора 2. Рабочий орган 4 подвижно по направляющим штокам 5 связан с ротором. Направляющие штоки 5 жестко закреплены на роторе. Упругие элементы 6 жестко соединены с ротором и рабочим органом. Ролики 7, жестко установленные на основании 1, исключают соприкосновение поверхностей индуктора и ротора при включении ЛАД. Рабочий орган подвешен на упругих элементах 8 на основании 1, на поверхности рабочего органа выполнены сепарирующие ячейки 9. Индуктор ЛАД подключается к источнику трехфазного переменного тока посредством блока управления 10.
Сепарирующая машина работает следующим образом. Блок управления 10 подключает индуктор 2 ЛАД к источнику питания. Индуктор создает бегущее магнитное поле, которое индуктирует в роторе ЭДС, вызывающие токи, от взаимодействия которых с магнитным полем в роторе образуются продольная (Fx) и, перпендикулярная ей, поперечная (Fy) электромагнитные силы. Под действием силы Fx ротор, а вместе с ним и рабочий орган 4 через штоки 5 приходит в поступательное движение (фиг.5 и фиг. 6). Одновременно под действием силы Fy ротор 3 притягивается к индуктору, а следовательно и рабочий орган 4 по штокам 5 совершает в этом направлении движение (перпендикулярно продольной оси индуктора) за счет деформируемых упругих элементов 6, которыми рабочий орган и ротор соединены. Сначала упругие элементы 6 растягиваются, а по мере движения рабочего органа в плоскости, перпендикулярной продольной оси индуктора, сжимается. Далее под действием силы Fx ротор с рабочим органом продолжают движение вдоль оси индуктора, а за счет потенциальной энергии, накопленной в упругих элементах 6, рабочий орган движется в обратном направлении, перпендикулярном оси индуктора. В этот момент упругие элементы 6 разжимаются. Таким образом, по мере поступательного движения ротора рабочий орган также совершает поступательные движения с колебаниями в плоскости, перпендикулярной продольной оси индуктора из-за наличия упругих элементов 6. Ролики 7, жестко установленные на основании 1, исключают соприкосновение поверхностей индуктора и ротора. Также при включении ЛАД упругие элементы 8 деформируются по направлению сил Fx и Fy. В какой-то момент времени, но не менее одного периода колебания рабочего органа в плоскости, перпендикулярной продольной оси индуктора, блок управления 10 обесточивает индуктор 2 ЛАД, его бегущее магнитное поле исчезает. Под действием потенциальной энергии, накопленной в упругих элементах 8, ротор с рабочим органом движутся в исходное состояние (фиг. 3 и фиг. 4), а под действием изменяющихся сил в упругих элементах 6 рабочий орган продолжает колебательное движение в плоскости, перпендикулярной продольной оси индуктора. Далее описанный процесс повторяется. Наличие упругих элементов 6 обеспечивает выраженные поперечные колебания рабочего органа 4 за весь период продольных колебаний, что способствует повышению ориентации зерновой частицы на решете (рабочем органе).
Частота собственных колебаний рабочего органа в плоскости, перпендикулярной к продольной оси индуктора, зависит от жесткости упругих элементов 6 и массы рабочего органа с грузом. Таким образом, изменением жесткости упругих элементов 6 можно получать необходимую частоту рабочего органа в плоскости, перпендикулярной к продольной оси индуктора.
Блок управления имеет возможность обеспечивать регулирование параметров продольных колебаний рабочего органа как по частоте, так и по амплитуде посредством изменения длительности и частоты включения индуктора ЛАД. Блок управления может быть реализован на базе тиристорных коммутаторов, приведенной в литературе [3].
Таким образом, предлагаемое техническое решение, за счет повышения ориентации зерновой частицы на решете посредством его поперечных колебаний с частотой большей, чем продольные, способствует повышению эффективности сепарирования.
Источники информации
1. Патент РФ 2364564, МКИ B65G 25/04. Шагающий конвейер / Аипов Р.С., Гильванов В.Ф., Линенко А.В., 2009, БИ №23.
2. Патент РФ 2446669, МКИ A01F 12/14. Сепарирующая машина / Аипов Р.С., Акчурин С.В., Линенко А.В., Туктаров М.Ф., 2012 (прототип).
3. Поскребко А. А. Бесконтактные коммутаторы и регулирующие полупроводниковые устройства на переменном токе. - М.: Энергия, 1978. - 58 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕПАРИРУЮЩАЯ МАШИНА | 2015 |
|
RU2576458C1 |
| СЕПАРИРУЮЩАЯ МАШИНА | 2010 |
|
RU2446669C1 |
| Линейный асинхронный электропривод для виброцентробежного сепаратора | 2021 |
|
RU2761001C1 |
| Виброцентробежный сепаратор | 2018 |
|
RU2686760C1 |
| ВИБРОЦЕНТРОБЕЖНЫЙ СЕПАРАТОР | 2023 |
|
RU2801510C1 |
| Виброцентробежный сепаратор | 2020 |
|
RU2739284C1 |
| Виброцентробежный сепаратор | 2020 |
|
RU2728113C1 |
| Вибрационная центрифуга | 2018 |
|
RU2678008C1 |
| ВИБРОЦЕНТРОБЕЖНЫЙ СЕПАРАТОР С ЛИНЕЙНЫМ ЭЛЕКТРОПРИВОДОМ | 2023 |
|
RU2811500C1 |
| Вибрационная центрифуга | 2016 |
|
RU2624702C1 |
Изобретение относится к сельскохозяйственному машиностроению и может быть использовано в устройствах для разделения убранных зерновых культур. Сепарирующая машина содержит упруго подвешенный рабочий орган 4 с приводом в виде плоского линейного асинхронного электродвигателя с неподвижным индуктором 2 и подвижным ротором 3. Ротор 3 расположен параллельно индуктору 2, но перпендикулярно рабочему органу 4 и может перемещаться перпендикулярно и параллельно продольной оси индуктора 4. Рабочий орган 4 подвешен на упругих элементах 8 и имеет на своей поверхности сепарирующие ячейки 9. Рабочий орган 4 подвижен относительно ротора 3 в плоскости, перпендикулярной продольной оси индуктора 2, и связан с ротором 3 через направляющие штоки и упругие элементы. За счет сложного колебательного движения рабочего органа 4 повышается эффективность сепарирования. 6 ил.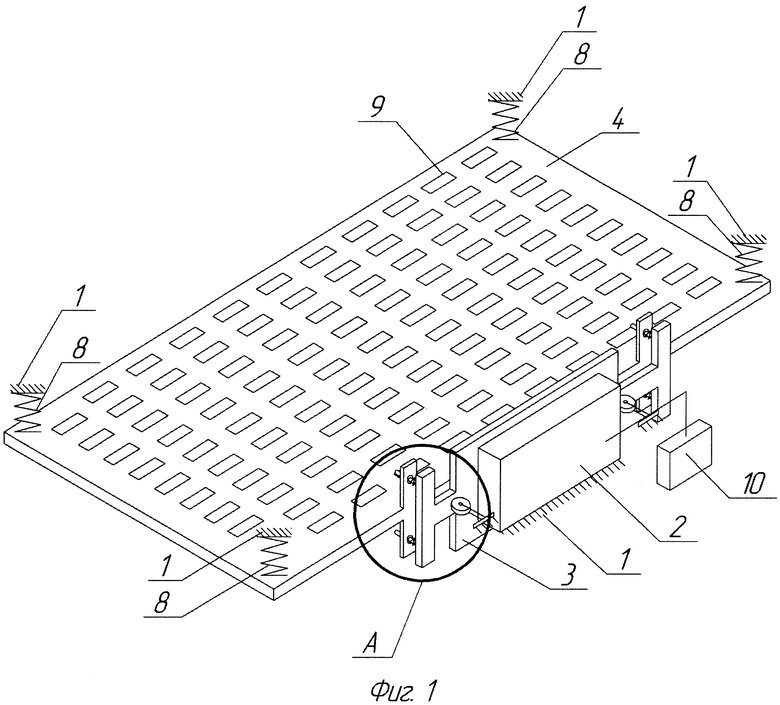
Сепарирующая машина, содержащая упруго подвешенный рабочий орган, привод рабочего органа в виде плоского линейного асинхронного электродвигателя с неподвижным индуктором и параллельно ему, но перпендикулярно рабочему органу установленным ротором с возможностью перемещения перпендикулярно и параллельно продольной оси индуктора, отличающаяся тем, что рабочий орган подвижен относительно ротора в плоскости, перпендикулярной продольной оси индуктора, и связан с ротором через направляющие штоки и упругие элементы.
| СЕПАРИРУЮЩАЯ МАШИНА | 2010 |
|
RU2446669C1 |
| Сепаратор семян | 1981 |
|
SU948469A1 |
| ПРИВОДНОЕ УСТРОЙСТВО РЕШЕТНЫХ СТАНОВ ЗЕРНООЧИСТИТЕЛЬНЫХ МАШИН | 2013 |
|
RU2526739C1 |
| СЕПАРАТОР СЫПУЧИХ МАТЕРИАЛОВ | 1994 |
|
RU2104098C1 |
| US 4064051 A, 20.12.1977. | |||

