Изобретение относится к радиотехнике, к области антенной техники в диапазоне СВЧ-КВЧ, и предназначено для использования в системах радиосвязи, радиопеленга, радионаблюдения и радиомониторинга.
В спутниковых системах связи с сотовым обслуживанием территории и в спутниковой связи с использованием стационарных и перемещаемых средств на борту искусственных спутников земли (ИСЗ) существует проблема формирования кластеров многолучевых антенн, связанная с необходимостью конфигурации на земной поверхности зон гарантированного уровня сигнала (ГУС), а также с выравниванием этого уровня в формируемых зонах.
Известны способы формирования кластерных зон облучающей решеткой многолучевой зеркальной антенны, формирующей несколько отклоненных диаграмм направленности - "парциальных лучей" или сканирующие лучом диаграммы направленности земную территорию в заданном угловом секторе (А. С. СССР №148630 HO1Q 15/20, №1181020 HO1Q 19/18, пат. ФРГ №2624398 HO1Q 3/26, пат. США №4044361 HO1Q 3/00, №4516130 HO1Q 19/19, №3914768 HO1Q 3/24).
Недостатком указанных аналогов является существенное различие в интенсивности плотности потока мощности в требуемых зонах покрытия на земной поверхности при формировании кластеров (наборов) облучателей облучающей решетки (ОР) многолучевой гибридной зеркальной антенны (МЛГЗА) [1].
Задачей изобретения является создание способа формирования кластерных зон облучающей решеткой многолучевой гибридной зеркальной антенны, обеспечивающего выравнивание по интенсивности плотности потока мощности при покрытии заданной области ГУС на земной поверхности.
Способ формирования кластерных зон облучающей решеткой многолучевой гибридной зеркальной антенны:
1. Определить парциальные диаграммы направленности (ДН), формируемые кластером облучателей, плоскость раскрыва которого ортогональна фокальной оси рефлектора МЛГЗА, и представить результат в азимут-угломестной системе координат бортовой антенны.
2. Преобразовать географические координаты (долгота  и геоцентрическая широта
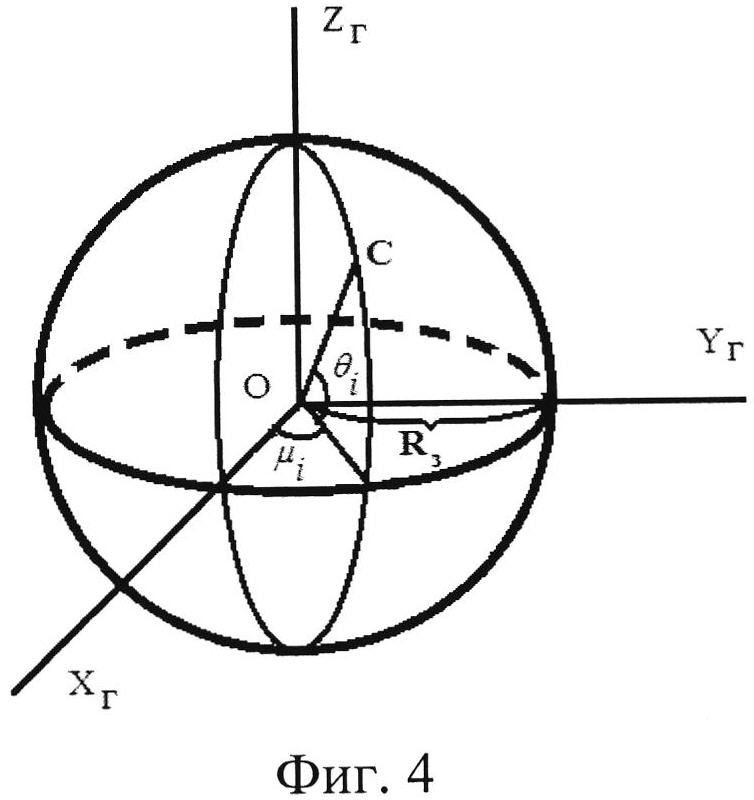
и геоцентрическая широта  ) точек, равномерно распределенных по области зоны гарантированного уровня сигнала (ГУС), в линейные координаты XГi, YГi, ZГi геоцентрической системы координат OXГYГZГ [1], (фиг. 4).
) точек, равномерно распределенных по области зоны гарантированного уровня сигнала (ГУС), в линейные координаты XГi, YГi, ZГi геоцентрической системы координат OXГYГZГ [1], (фиг. 4).
3. Преобразовать линейные координаты ХГi, YГi, ZГi точек, характеризующих область ГУС, в систему линейных координат космического аппарата [1] ДXKAYKAZKA (фиг. 5).
4. Сформировать параметры наведения бортовой антенны МЛГЗА.
5. Преобразовать координаты точек, характеризующие область ГУС в линейной системе координат космического аппарата, в линейную систему координат бортовой антенны OAXAYAZA (фиг. 5), далее в азимут-угломестную систему координат антенны (угол подъема  и угол бокового отклонения
и угол бокового отклонения  ).
).
6. Отобразить электромагнитные волны, распространяющиеся от каждой из точек области ГУС на поверхности Земли в виде набора геометрооптических лучей (ГО-лучей) [2] со значением амплитуды от нуля до единицы при необходимости учета потерь трассы связи или единичной амплитуды в противном случае.
7. Для каждой ДН сформировать набор значений уровня поля излучения в направлении каждого из ГО-лучей. Определить сумму элементов указанных наборов, которые превышают заданный порог ГУС. Сформировать вектор весовых коэффициентов эффективности использования отдельных облучателей и всей ОР в зависимости от углов установки антенны по приведенному итеративному алгоритму, приведенному выше, попадания ГО-лучей в пределы зоны излучения антенной системы.
8. Повторить пп. 4-7 для ближайших наборов значений углов установки антенны. Сравнить значения коэффициентов использования всей ОР, найти локальный максимум в зависимости от набора значений углов установки антенны.
9. Облучатели ОР, весовой коэффициент использования которых не превышает заданного числового порога эффективности использования, не используются при формировании поля излучения для передающих антенн и суммы входного сигнала для приемных антенн. Величина порога эффективности использования определяется на стадии проектирования спутниковой системы связи на основе экономических показателей системы. Пояснение к п. 1 способа:
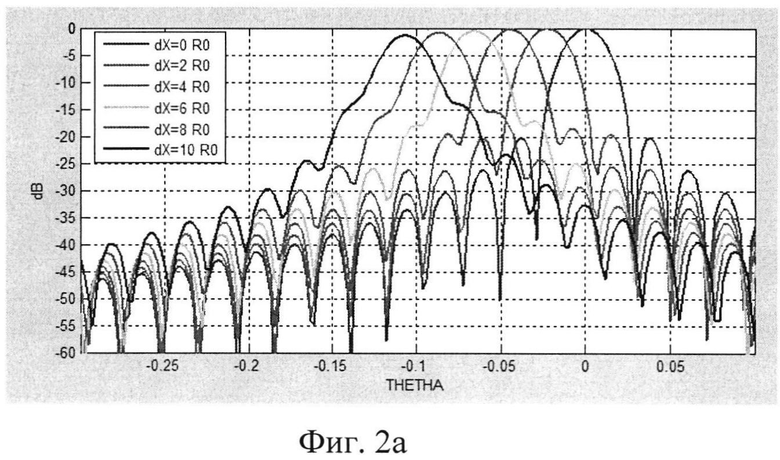
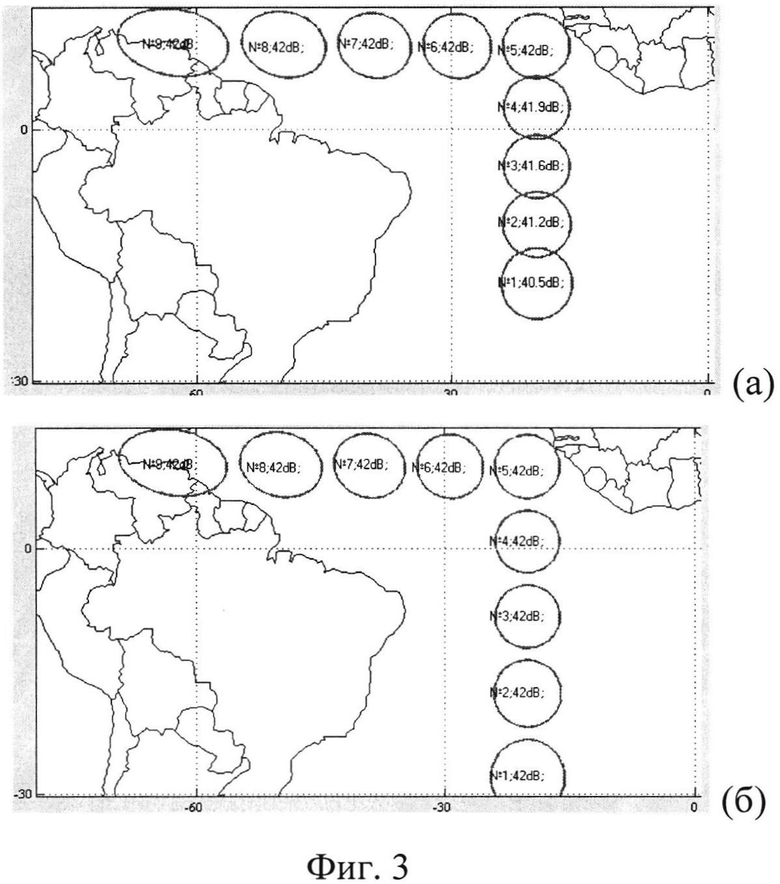
Плоскость раскрыва ОР ортогональна фокальной плоскости параболоида (фиг. 1), а оси облучателей наклонены к фокальной оси, поэтому отсутствуют смещения вдоль фокальной оси относительно фокуса параболоида облучателей, примыкающих к центральному облучателю, что исключает квадратичные фазовые распределения поля в раскрыве для этих облучателей. Парциальные ДН, формируемые этими облучателями, не испытывают характерных для квадратичных фазовых искажений расширения главного лепестка парциальной ДН и ослабления уровня поля в направлении максимума излучения (фиг. 2,б). При этом происходит выравнивание плотности потока мощности в парциальных зонах обслуживания, формируемых этими диаграммами (фиг. 3,б) и (10,б).
Совокупность этих существенных признаков формирует отличный от известных ранее способ формирования кластерных зон облучающей решеткой многолучевой гибридной зеркальной антенны с измененной конфигурацией структуры ОР для организации требуемых зон покрытия на земной поверхности.
Заявленный способ поясняется чертежами, на которых показаны:
на фиг. 1 - МЛГЗА с рефлектором 1, ортогональной фокальной оси OAZA ОР-2, состоящей из рупорных облучателей 3;
на фиг. 2,а - парциальные ДН антенны с наклонной ОР по отношению к фокальной оси зеркала антенны;
на фиг. 2,б - парциальные ДН антенны с ортогональной ОР по отношению к фокальной оси зеркала антенны;
на фиг. 3 - локальные зоны ГУС, формируемые парциальными ДН антенны с наклонной (а) и ортогональной (б) по отношению к фокальной оси ОР;
на фиг. 4 - схема определения угловых и линейных координат точки наблюдения;
на фиг. 5 - геометрическое представление перехода от относительной геоцентрической системы координат к орбитальной подвижной системе координат;
на фиг. 6 - пример конфигурации облучающей решетки;
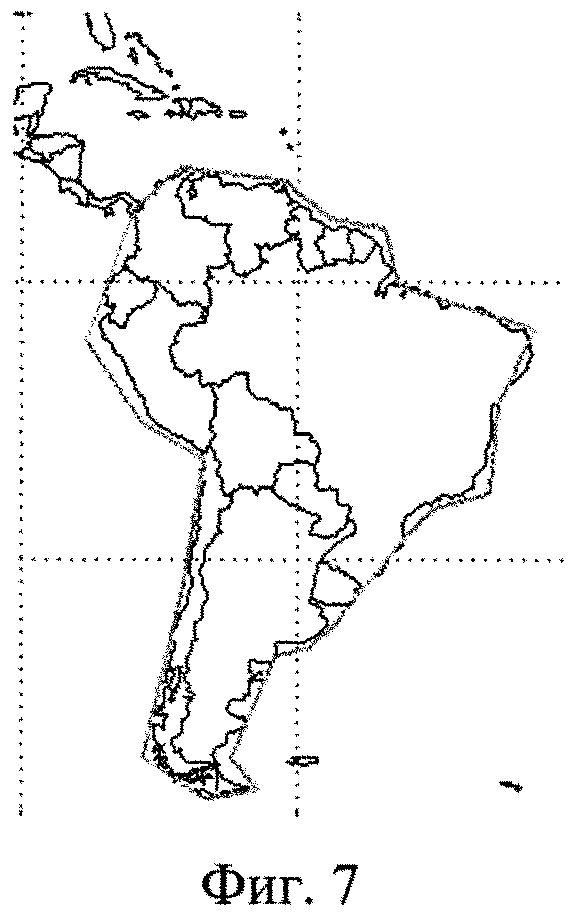
на фиг. 7 - пример заданной области гарантированного уровня сигнала на земной поверхности;
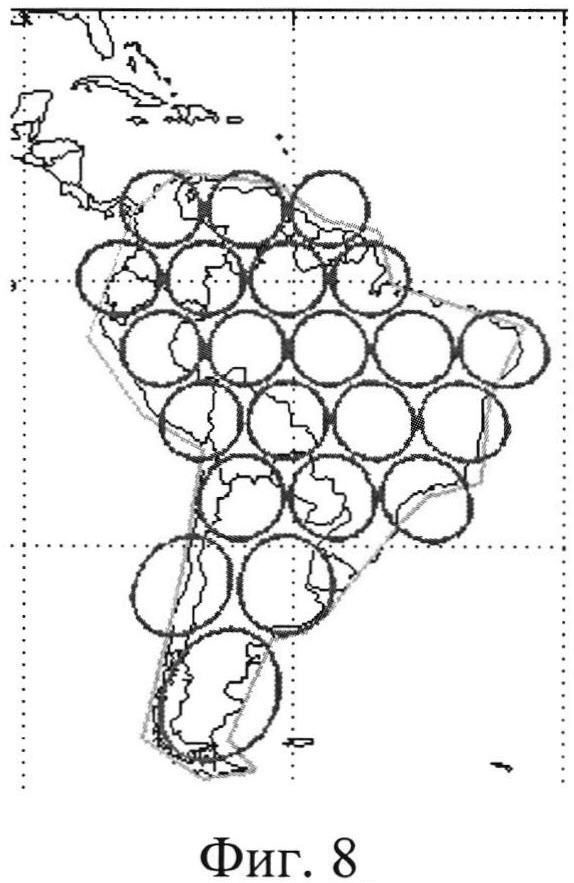
на фиг. 8 - локальные зоны обслуживания, формирующие зону ГУС;
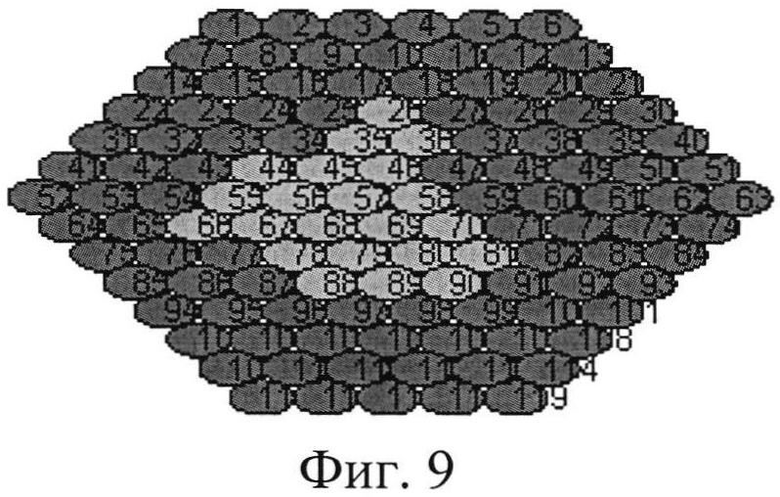
на фиг. 9 - сформированный кластер облучателей;
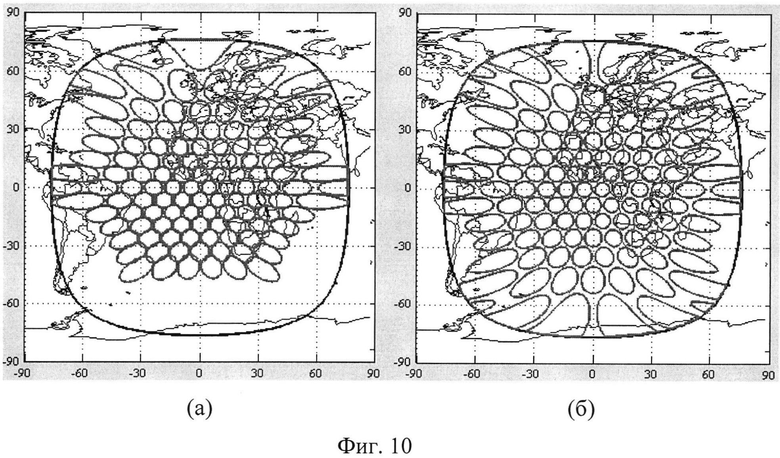
на фиг. 10 - пример освещения видимой поверхности Земли антенной с наклонной (а) и ортогональной (б) по отношению к фокальной оси ОР.
Конфигурация зон обслуживания определялась с использованием программы для ЭВМ Satellite Academic Research (свидетельство о государственной регистрации программы для ЭВМ Ru №2013660428).
Исходные данные для решения поставленной задачи разделяются на три типа:
- параметры, характеризующие ориентацию спутника ретранслятора, включающие в себя широту и долготу  подспутниковой точки, углы установки бортовой антенны и высоту ИСЗ над поверхностью земли;
подспутниковой точки, углы установки бортовой антенны и высоту ИСЗ над поверхностью земли;
- географические координаты границы области ГУС  где i=1…n, n - число элементов выборки точек, характеризующих область ГУС.
где i=1…n, n - число элементов выборки точек, характеризующих область ГУС.
- параметры антенной системы ретранслятора на ИСЗ, включающие в себя: форма профиля рефлектора (параболическая, эллиптическая, сферическая), фокусное расстояние (F), клиренс антенны (С), размеры раскрыва рефлектора зеркальной системы антенны и облучающих элементов ОР, расположение и ориентация облучателей на ОР, частотно-поляризационное разделение стволов передачи данных.
В качестве модели формы земной поверхности принимается аппроксимация в виде эллипсоида вращения (большая полуось а=Re=6378.245 км и эксцентриситет еЗ=0.081813), называемого референц-эллипсоидом. Положение наблюдателя (ЗСС) на поверхности Земли задается тремя параметрами - географической долготой  географической широтой
географической широтой  и высотой над уровнем референц-эллипсоида
и высотой над уровнем референц-эллипсоида  которую для упрощения модели можно принять равной
которую для упрощения модели можно принять равной  геометрическое представление земной сферы с указанием угловых и линейных координат представлено на фиг. 4.
геометрическое представление земной сферы с указанием угловых и линейных координат представлено на фиг. 4.
Линейные координаты точки наблюдателя С:
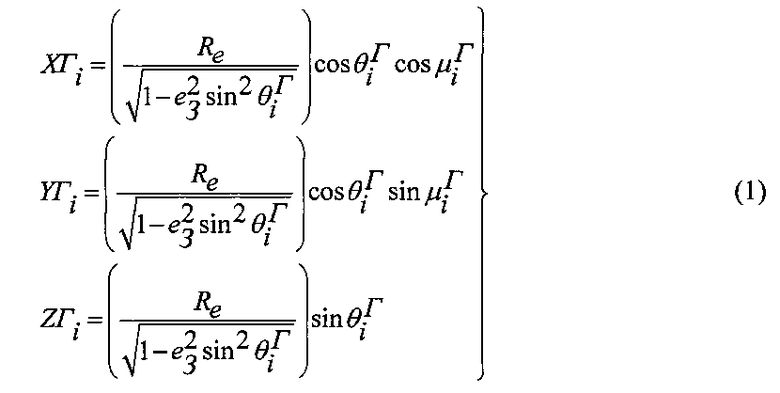
Для определения параметров линейных координат преобразовываем исходный массив точек области ГУС из угловых координат (географическая широта и долгота) в линейные координаты XГi, YГi, ZГi, относительной геоцентрической системы координат (OXГУГZГ), где ХГi, YГi, ZГi - координаты точек области ГУС в относительной геоцентрической системы координат,  , географические координаты точек области ГУС. Далее преобразовываем в линейные координаты местоположение искусственного спутника Земли (ИСЗ) и точки прицеливания антенны. В качестве первого приближения точки прицеливания принимается центр совокупности точек, характеризующих область ГУС
, географические координаты точек области ГУС. Далее преобразовываем в линейные координаты местоположение искусственного спутника Земли (ИСЗ) и точки прицеливания антенны. В качестве первого приближения точки прицеливания принимается центр совокупности точек, характеризующих область ГУС  Для преобразования точки прицеливания в линейные координаты ХГПР, УГПР, ZГПР используются выражения (1).
Для преобразования точки прицеливания в линейные координаты ХГПР, УГПР, ZГПР используются выражения (1).
Так как плоскость геостационарной орбиты находится в плоскости экватора, то  где
где  - номинальное значение долготы спутника,
- номинальное значение долготы спутника,  - географические координаты подспутниковой точки [1], (фиг. 5).
- географические координаты подспутниковой точки [1], (фиг. 5).
Для определения угловых координат ИСЗ в линейной системе координат OXГYГZГ вместо радиуса Земли в выражении (1) указывается расстояние от центра Земли до ИСЗ (для ИСЗ, расположенных на геостационарной орбите радиус орбиты, равен RКА=42164 км). Исходя из вышесказанного:
где ХГKA, YГKA, ZГKA - линейные координаты ИСЗ в системе OXГYГZГ.
Для определения параметров наведения антенны ИСЗ используется орбитальная подвижная система координат ДХKAYKAZKA [1], (фиг. 5). Начало данной системы совмещено с центром масс спутника-ретранслятора Д, основная плоскость - плоскость орбиты, ось ДХКА является продолжением радиус-вектора из центра земной сферы в точку Д. Ось ДYКА расположена в плоскости орбиты перпендикулярно ДХКА. Ось ДZКA дополняет систему до правой системы координат.
Для перехода координат точек наблюдения, точки прицеливания и местоположения ИСЗ относительной геоцентрической системы координат к координатам в орбитальной подвижной системе координат используют общие соотношения аналитической геометрии в векторной форме:
Где  - координаты точки в первой OXYZ и во второй O1X1Y1Z1 системах координат соответственно; xц,yц,zц - координаты начала О второй системы координат в системе координат первой OXYZ; [ajk] - матрица направляющих косинусов, определяющих углы между осями рассматриваемых координатных систем.
- координаты точки в первой OXYZ и во второй O1X1Y1Z1 системах координат соответственно; xц,yц,zц - координаты начала О второй системы координат в системе координат первой OXYZ; [ajk] - матрица направляющих косинусов, определяющих углы между осями рассматриваемых координатных систем.
Матрица направляющих косинусов [ajk] определяется тремя независимыми параметрами, не являющимися элементами этой матрицы, но функционально с ними связанными:
В качестве таких параметров выбираются углы поворота системы координат OXYZ вокруг собственных осей (углы редукции) - ψx, ψy, ψz, которые при соблюдении заданного порядка реализации поворотов (маршрута реализации) обеспечивают совпадение осей обеих координатных систем при совпадении их начал [1].
Углы редукции используют для определения элементов матрицы (4) методом трех последовательных поворотов осей координат [3] (метод трех поворотов), основой которого являются элементарные матрицы, связывающие преобразованные и исходные координаты при раздельной реализации редукционных углов:

Элементы матрицы [ajk] находятся в результате перемножения элементарных матриц ΨX, ΨY, ΨZ согласно маршруту реализации.
Для перехода из относительной геоцентрической системы координат OXГYГZГ в орбитальную подвижную ДXКАYКАZКА и при расположении ИСЗ на ГСО выбираем следующий маршрут реализации: ψz → ψy → ψx. Так как вращение осей координат осуществляется вокруг оси OZГ системы OXГУГZГ (угол поворота определяется долготой подспутниковой точки  ), согласно фиг. 5, углы редукции будут равны:
), согласно фиг. 5, углы редукции будут равны: 
Координатами центра орбитальной системы координат в геоцентрической системе координат являются координаты ИСЗ (XГКА, YГКА, ZГКА), определенные ранее (2).
Исходя из значений координат точек области ГУС в геостационарной системе координат (1) и координат центра орбитальной системы в геоцентрической системе координат (2) с учетом выражений (3), (5) определяем координаты точек области ГУС (6) и точки прицеливания в системе координат ИСЗ (7):

Для углов установки антенны в системе координат КА вводим обозначения:
 - угол подъема;
- угол подъема;
 - угол бокового отклонения;
- угол бокового отклонения;
σ=σ0 - угол начального поворота антенны.
В качестве системы координат бортовой антенны принята прямоугольная система координат OAXAYAZA. Начало координат совмещено с вершиной параболоида вращения, описывающего поверхность зеркала антенны, ось OAZA совпадает с фокальной осью, ось ОАХА лежит в плоскости симметрии зеркала и направлена от оси OAZA к верхней кромке зеркала, ось OAYA дополняет систему до правой системы координат.
Представленные выше углы являются углами редукции перевода из системы координат ИСЗ ДXКАYКАZКА в систему координат антенны ОAXAYAZA, при этом: ψх=σ, ψy=ψП, ψz=ψБ, а угол начального поворота антенны задается отдельно в исходных данных, примем его σ=0. Процедура перехода определяется выражением (8).

где А - матрица направляющих косинусов преобразования координат из системы ДXКАYКАZКА в OAXAYAZA.
Элементы матрицы направляющих косинусов [А] определяются порядком реализации поворотов координатных осей системы. ДXКАYКАZКА до совмещения с координатными осями системы OAXAYAZA при переносе точки Д в ОА:

Для определения угла подъема и угла бокового отклонения вводится дополнительная система координат, представляющая собой редукцию от прямоугольной системы координат ОAXAYAZA. Данная система координат характеризуется углом подъема  и углом бокового отклонения
и углом бокового отклонения 

Электромагнитные волны, распространяющиеся от каждой из точек области ГУС на поверхности Земли, представляем в виде набора геометрооптических лучей (ГО-лучей) со значением амплитуды от нуля до единицы при необходимости учета потерь трассы связи или единичной амплитуды в противном случае. При учете потерь трассы связи единичная амплитуда присваивается ГО-лучу с минимальными потерями. Амплитуда i-го ГО-луча определяется отношением потерь в направлении i-го луча к потерям в направлении ГО-луча с минимальными потерями.
Определение попадания ГО-лучей в пределы зоны излучения антенной системы представляется итеративным алгоритмом:
1. Сформировать начальный набор значений углов установки антенны.
2. Для каждого облучателя:
a. Определить набор значений уровня поля излучения в направлении каждого из ГО-лучей  где
где  - амплитудная ДН поля излучения j-го излучателя в направлении i-го ГО-луча.
- амплитудная ДН поля излучения j-го излучателя в направлении i-го ГО-луча.
b. Определить сумму элементов указанных наборов, которые превышают заданный порог ГУС: Sumj=∑i(Fj>ГУС).
3. Для каждого облучателя определить значение весового коэффициента  Определить число используемых облучателей с отличными от нуля коэффициентами ωj и представить в виде произведения числа используемых облучателей на значение отличных от нуля коэффициентов ωj.
Определить число используемых облучателей с отличными от нуля коэффициентами ωj и представить в виде произведения числа используемых облучателей на значение отличных от нуля коэффициентов ωj.
4. Определить эффективность использования ОР МЛГЗА при текущих углах установки антенны. В качестве целевой функции принимаем зависимость значения произведения отличных от нуля коэффициентов из набора ωj и числа, отличных от нуля, коэффициентов ωj (числа использованных облучателей) от угла установки антенны.
5. Сохранить в памяти вычислительного устройства значение целевой функции и вектор весовых коэффициентов ωj.
Повторить действия 1-5 для ближайших наборов значений углов установки антенны. Выбрать набор углов установки антенны, максимизирующий целевую функцию в зависимости от критерия поиска локального максимума. Облучатели, весовой коэффициент которых ωj не превышает заданного порога, считаем отключенными.
Реализация заявляемого способа моделировалась на ЭВМ на примере формирования кластерных зон ОР, конфигурация которой представлена на фиг. 6, МГЗА с рефлектором в виде вырезки из параболоида вращения с фокусным расстоянием F=0,7 м, клиренсом антенны С=0,2, размерами большой и малой полуосей рефлектора а=b=0,225 м и радиусов облучающих элементов R0=0,01 м для оптимального покрытия области ГУС на земной поверхности, представленной на фиг. 7. ОР расположена в фокальной области формирующего рефлектора антенны, причем ее плоскость ортогональна фокальной оси, а облучатели наклонены в плоскости OAXAZA на угол α0=35° относительно оси OAZA. Параметры ориентации спутника определяются границей ГУС и равны 
 σ=0°. Результат расчета конфигурации ОР (фиг 9), формирующей область ГУС, представлен на фиг. 8.
σ=0°. Результат расчета конфигурации ОР (фиг 9), формирующей область ГУС, представлен на фиг. 8.
При расположении излучателей в плоскости, ортогональной фокальной оси, максимумы парциальных ДН оказывается постоянным (фиг. 10,б) и несколько большими (фиг. 2) по сравнении с базовым вариантом расположения облучателей в ОР (фиг. 10,а). За счет этого ширина парциальных ДН практически постоянная при удалении от луча, близкого к фокальной оси, пересечение границ ДН локальных зон происходит так, что сами зоны оказываются пространственно разнесенными, и это позволяет покрыть одинаковую территорию земной поверхности меньшим числом облучателей (фиг. 10).
Техническим результатом, обеспечиваемым способом формирования кластерных зон облучающей решеткой многолучевой гибридной зеркальной антенны, является выравнивание по интенсивности плотности потока мощности при покрытии заданной области ГУС на земной поверхности, причем меньшим числом облучателей.
Предлагаемый способ формирования кластерных зон облучающей решетки многолучевой гибридной зеркальной антенны можно рассматривать как новый способ формирования кластерных зон ОР для лучшего покрытия заданной области ГУС на земной поверхности с использованием меньших средств. Использование в качестве рефлектора вырезки из любой иной поверхности второго порядка не накладывает ограничения на предложенный способ, т.е. заявленное решение является для любых рефлекторов, формирующих многолучевую диаграмму направленности или предназначенных для обеспечения сканирования путем попеременной коммутации лучей, сформированных кластером.
Источники информации
1. Машбиц Л.М. Компьютерная картография и зоны спутниковой связи. - 2-е изд., перераб. и доп. - М: Горячая линия - Телеком, 2009.
2. Боровиков В.А., Кинбер Б.Е. Геометрическая теория дифракции. - М.: Связь, 1978.
3. Выгодский М.Я. Справочник по высшей математике. - М.: Наука, 1972.
4. Сомов A.M., Волгаткин К.М., Ласкин Б.Н. Бортовая антенна для спутниковых радиосистем с сотовой конфигурацией зон обслуживания. - М., Труды НИИР №1 2012.



Использование: радиотехника, области антенной техники в диапазоне СВЧ-КВЧ, и предназначено для использования в системах радиосвязи, радиопеленга, радионаблюдения и радиомониторинга. Технический результат: выравнивание (по интенсивности) плотности потока мощности при покрытии заданной области ГУС на земной поверхности меньшим числом облучателей. Сущность изобретения: в способе отображают географические координаты (широты и долготы) точек, равномерно распределенных по области зоны гарантированного уровня сигнала (ГУС), в линейной системе геоцентрических координат, последовательно переводят линейные координаты области ГУС в систему линейных координат бортовой антенны, далее в азимут-угломестную систему координат антенны и отображении электромагнитных волн, распространяющихся от каждой из точек области ГУС на поверхности Земли в виде геометрооптических лучей (ГО-лучей) равной амплитуды, определяют парциальные диаграммы направленности (ДН) бортовой антенны в азимут-угломестной системе координат бортовой антенны, при этом плоскость раскрыва кластера облучателей, формирующего парциальные диаграммы излучения антенны, устанавливается ортогонально фокальной оси параболоида, формирующего зеркало антенны, а результирующий кластер формируют путем попадания ГО-лучей в пределы главного лепестка каждой из парциальных ДН антенны, а местоположение центрального облучателя формируемой области кластерной группы располагают в области, близкой к фокальной оси параболоида, а периферийные облучатели устанавливают так, что их ДН перекрывают оставшуюся часть проекций ГО-точек в азимут-угломестной системе координат антенны до полного формирования области ГУС. 10 ил.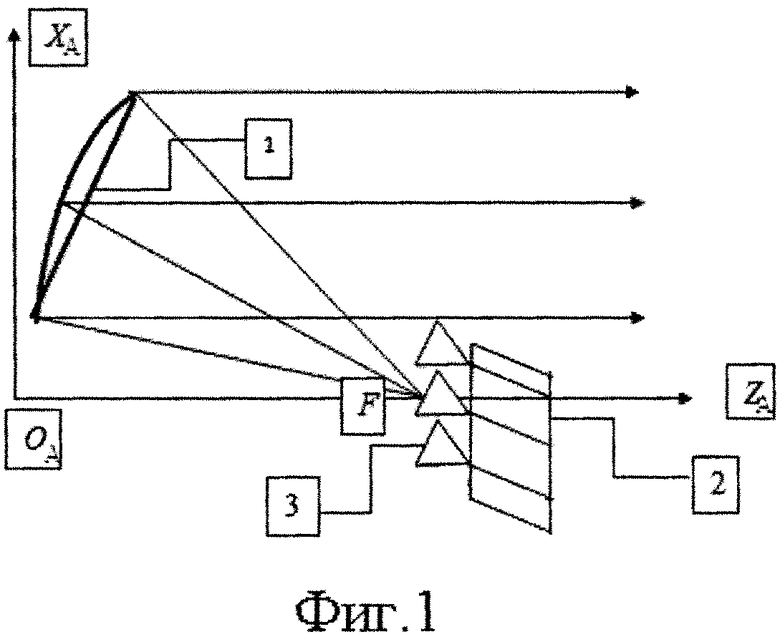
Способ формирования кластерных зон облучающей решеткой многолучевой гибридной зеркальной антенны с зеркалом в виде неосесимметричной вырезки из параболоида вращения и облучающей решетки, нормаль к плоскости раскрыва которой и продольные оси облучателей наклонены относительно фокальной оси образующего зеркало параболоида, заключающийся в отображении географических координат (широты и долготы) точек, равномерно распределенных по области зоны гарантированного уровня сигнала (ГУС) в линейную систему геоцентрических координат, последовательном переводе линейных координат области ГУС в систему линейных координат бортовой антенны, далее в азимут-угломестную систему координат антенны и отображении электромагнитных волн, распространяющихся от каждой из точек области ГУС на поверхности Земли, в виде геометрооптических лучей (ГО-лучей) равной амплитуды, определение парциальных диаграмм направленности (ДН) бортовой антенны в азимут-угломестной системе координат бортовой антенны, отличающийся тем, что плоскость раскрыва кластера облучателей, формирующего парциальные диаграммы излучения антенны, устанавливают ортогонально фокальной оси параболоида, формирующего зеркало антенны, а результирующий кластер устанавливают так, что ГО-лучи располагаются в пределах главного лепестка каждой из парциальных ДН антенны, при этом центральный облучатель формируемой области кластерной группы устанавливают в области, близкой к фокальной оси параболоида, а периферийные облучатели, окружающие центральный облучатель, устанавливают так, что их ДН перекрывают оставшуюся часть проекций ГО-точек в азимут-угломестной системе координат антенны до полного формирования области ГУС.
| МНОГОЛУЧЕВАЯ ЗЕРКАЛЬНАЯ АНТЕННА | 1994 |
|
RU2080711C1 |
| ГИБРИДНАЯ ЗЕРКАЛЬНАЯ СКАНИРУЮЩАЯ АНТЕННА ДЛЯ МНОГОРЕЖИМНОГО КОСМИЧЕСКОГО РАДИОЛОКАТОРА С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ | 2009 |
|
RU2392707C1 |
| ГИБРИДНАЯ ЗЕРКАЛЬНАЯ АНТЕННА С РАСШИРЕННЫМИ УГЛАМИ СЕКТОРНОГО СКАНИРОВАНИЯ | 2007 |
|
RU2352033C1 |
| Бифокальная двухзеркальная антенна | 1984 |
|
SU1181020A1 |
| ОПТИЧЕСКИЙ СОЕДИНИТЕЛЬ | 2015 |
|
RU2624398C2 |

