Область техники, к которой относится изобретение
Настоящее изобретение относится к подаче топлива в двигатель. Система и способ могут быть особенно полезными в двигателях, топливо в которые подается из двух и более источников по нескольким каналам топливоподачи.
Уровень техники
Может существовать необходимость подачи в двигатель двух видов топлива или же одного вида топлива по различным каналам, что имеет свои преимущества и/или недостатки. Например, в определенных условиях может быть целесообразным эксплуатировать двигатель на бензине, а в других условиях - на газообразном топливе, таком как компримированный природный газ (КПГ). В других условиях может быть целесообразной подача в двигатель двух видов топлива с разными октановыми числами, позволяющая сберечь высокооктановое топливо для условий тяжелых нагрузок, а более дешевое низкооктановое топливо использовать в условиях небольших нагрузок. Наибольшей гибкостью система с впрыском в двигатель двух видов топлива или жидкостей может обладать тогда, когда каждый цилиндр снабжен индивидуальными форсунками для топлива каждого вида.
Тем не менее, удвоение количества форсунок подачи топлива в двигатель может повысить стоимость и сложность контроллера двигателя и в некоторых случаях может быть практически неосуществимым ввиду ограничений конструктивного размещения. Одним из путей обхода ограничений конструктивного размещения контроллера и подачи двух видов топлива в двигатель является установка вторичного контроллера, имеющего электрическую связь с первым, или первичным контроллером. В такой компоновке вторичный контроллер может выдавать сигналы управления вторичной топливной системой.
Одним из способов электрической связи вторичного контроллера с первичным контроллером является проверка вторичным контроллером наличия выходных сигналов от первичного контролера для каждой из первичных топливных форсунок, которые приводит в действие первичный контроллер. Вторичный контроллер может выдавать выходные сигналы управления вторичными топливными форсунками на основе выходных сигналов для первичных топливных форсунок. Например, когда первичным впрыскиваемым топливом является бензин, а вторичным впрыскиваемым топливом является КПГ, для получения требуемого состава топливовоздушной смеси в двигателе выходные сигналы вторичного контроллера по управлению форсунками могут корректироваться пропорционально выходным сигналам первичного контроллера, контроль за наличием которых осуществляется вторичным контроллером. Хотя такая система и может быть работоспособной, она потребует создания многочисленных электрических соединений между первичным и вторичным контроллерами. Кроме того, такая система может не быть достаточно полезной, если два топлива в двигатель требуется вводить за один рабочий цикл двигателя, так как выходные сигналы на вторичные топливные форсунки привязаны к выходным сигналам приведения в действие первичных топливных форсунок.
Раскрытие изобретения
Были выявлены указанные выше недостатки, и разработана система двигателя, содержащая первую группу топливных форсунок; вторую группу топливных форсунок; последовательную коммуникационную шину; первый контроллер, запрограммированный для непосредственного приведения в действие первой группы топливных форсунок и подачи по последовательной коммуникационной шине команд для приведения в действие второй группы топливных форсунок; и второй контроллер, запрограммированный для приема команд по последовательной коммуникационной шине и непосредственного приведения в действие второй группы топливных форсунок, причем первая группа топливных форсунок и вторая группа топливных форсунок выполнены с возможностью подачи в двигатель разных видов топлива, причем команды содержат данные ширины импульса впрыска топлива, при этом данные ширины импульса впрыска топлива пересылаются по последовательной коммуникационной шине в моменты времени, зависящие от определенных положений коленчатого вала двигателя.
Причем указанные моменты времени могут зависеть от нескольких событий процесса внутреннего сгорания в двигателе.
Путем передачи сигнала ширины импульса впрыска топлива для некоторого числа топливных форсунок по единственной последовательной асинхронной коммуникационной шине (например, шине CAN) обеспечивается возможность сокращения числа электрических соединений между двумя контроллерами, каждый из которых независимо управляет отдельной группой топливных форсунок. К примеру, если можно передавать несколько ширин импульса впрыска топлива между двумя или более контроллерами по единственной последовательной коммуникационной шине, состоящей из пары одножильных проводов, то количество электрических соединений можно уменьшить с n до 1, где n - количество топливных форсунок в системе двигателя.
Кроме того, если ширины импульса впрыска топлива должным образом пересылают по последовательной коммуникационной шине, то топливные форсунки, находящиеся под управлением первого контроллера, могут приводиться в действие отлично от того, как приводятся в действие топливные форсунки, находящиеся под управлением второго контроллера. Например, в случае, когда первая топливная форсунка подает в цилиндр бензин, а вторая топливная форсунка в этот же цилиндр подает спирт, первый контроллер может непосредственно приводить в действие первую топливную форсунку по первой ширине импульса, а второй контроллер может непосредственно приводить в действие вторую топливную форсунку по второй ширине импульса. При этом топливные форсунки могут работать независимо, даже при том, что команды обеим группам топливных форсунок исходят от одного контроллера.
Также в рамках настоящего изобретения разработан способ управления работой двигателя, включающий приведение в действие первой группы топливных форсунок, которое осуществляют напрямую через первый контроллер; передачу данных ширины импульса впрыска топлива от первого контроллера на второй контроллер по единственной асинхронной последовательной коммуникационной шине; и приведение в действие второй группы топливных форсунок, которое осуществляют напрямую через второй контроллер с использованием указанных данных ширины импульса впрыска топлива.
Настоящим изобретением предлагается ряд преимуществ. В частности, предлагаемый подход может снизить объем разводки проводов и сложность системы, в которой две топливные форсунки подают топливо в один цилиндр двигателя. Дополнительно, предлагаемый подход может снизить стоимость системы за счет того, что контроллер, изначально предназначенный для управления подачей одного топлива в двигатель, может быть преобразован для управления работой двигателя на двух видах топлива простым электрическим подсоединением второго контроллера к последовательной коммуникационной шине первого контроллера. Кроме всего прочего, предлагаемый подход может сократить время разработки системы, так как инструкции приведения в действие топливных форсунок могут быть интегрированы с существующими инструкциями контроллера, предназначенными для управления впрыском топлива одного вида.
Приведенные выше преимущества, равно как иные преимущества и особенности настоящего изобретения будут явным образом представлены в нижеследующем подробном описании, которое может рассматриваться либо отдельно, либо совместно с сопутствующими чертежами.
Следует понимать, что содержащиеся в данном кратком обзоре сведения приведены с целью ознакомления в упрощенной форме с некоторыми идеями, которые далее рассмотрены в подробном описании. Данный раздел не предназначен для формулирования ключевых или существенных признаков объекта изобретения, объем которого единственным образом определен пунктами формулы изобретения, приведенной после подробного описания. Более того, объект изобретения не ограничен вариантами осуществления, которые решают проблему недостатков, упомянутых выше или в любой другой части данного описания.
Краткое описание чертежей
Преимущества, описываемые в настоящем изобретении, станут более понятными после прочтения примера в разделе «Осуществление изобретения», который может рассматриваться либо отдельно, либо совместно со следующими прилагаемыми чертежами:
Фиг. 1 схематически изображает двигатель;
Фиг. 2 подробно иллюстрирует пример системы подачи топлива;
Фиг. 3 иллюстрирует смоделированную временную последовательность пересылки установок времени впрыска топлива по одной последовательной коммуникационной шине.
Фиг. 4 иллюстрирует пример способа управления первым контроллером, пересылающим команды впрыска топлива по единственной последовательной коммуникационной шине.
Фиг. 5 иллюстрирует пример способа управления вторым контроллером, получающим команды впрыска топлива по единственной последовательной коммуникационной шине.
Осуществление изобретения
Настоящее изобретение относится к системам и способам подачи топлива в двигатель. В одном примере топливная система выполнена с возможностью подачи топлива в двигатель согласно схеме, изображенной на Фиг. 1. На Фиг. 2 подробно иллюстрируется пример топливной системы, предназначенной для подачи топлива в двигатель. На Фиг. 3 показаны смоделированные примерные временные последовательности широковещательной передачи и приема команд управления топливной форсункой по последовательной асинхронной коммуникационной шине. Сигналы, показанные на Фиг. 3, могут генерироваться способом, иллюстрируемым Фиг. 4 и 5.
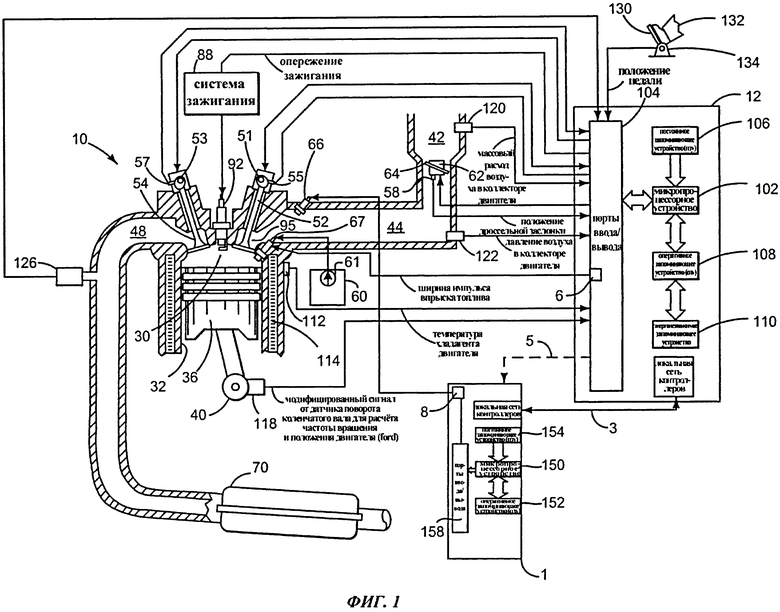
Как показано на Фиг. 1, двигатель внутреннего сгорания 10, содержащий некоторое число цилиндров, один из которых показан на Фиг. 1, работает под управлением контроллера 12 электронного управления двигателем. Двигатель 10 включает в себя камеру сгорания 30 и стенки 32 цилиндра с установленным внутри них поршнем 36, соединенным с коленчатым валом 40. Камера 30 сгорания показана сообщающейся с впускным коллектором 44 и выпускным каналом 48 через соответствующий впускной клапан 52 и выпускной клапан 54. Каждый впускной и выпускной клапан может приводиться в движение впускным кулачком 51 и выпускным кулачком 53. В иных случаях один или несколько впускных и выпускных клапанов могут приводиться в движение узлом электромеханического привода с катушкой и якорем. Положение впускного кулачка 51 может определяться датчиком впускного кулачка 55. Положение выпускного кулачка 53 может определяться датчиком выпускного кулачка 57.
Первая топливная форсунка 66 показана в положении для впрыска топлива во впускной канал 95 цилиндра, что специалистам в данной области техники известно как впрыск топлива во впускные каналы. В других примерах топливная форсунка 66 может впрыскивать топливо непосредственно в камеру 30 сгорания, что специалистам в данной области техники известно как прямой впрыск топлива. Топливная форсунка 66 подает газообразное топливо пропорционально ширине импульса FPW от контроллера 12. В других примерах топливная форсунка 66 может впрыскивать жидкое топливо. Топливная форсунка 66 управляется напрямую через вторичный топливный контроллер 1. Точнее, для приведения в действие топливной форсунки 66 подается ток от привода 8. В других примерах привод 8 может быть выполнен с возможностью электрической регулировки гидравлического давления, подаваемого на топливную форсунку 66. Привод может быть транзисторным, МОП-транзисторным, биполярным или другого типа. Вторичный топливный контроллер 1 включает в себя микропроцессорное устройство (CPU) 150, оперативное запоминающее устройство (RAM) 152, постоянное запоминающее устройство (ROM) 154, порты 158 ввода/вывода (I/O). Вторичный топливный контроллер 1 обменивается информацией с контроллером 12 по последовательной коммуникационной шине 3. Контроллер 12 выполнен также с возможностью подачи на вторичный топливный контроллер 1, цифрового шаблонного сигнала, повторяющегося каждый рабочий цикл двигателя 10.
Топливо в двигатель 10 может подаваться также через вторую топливную форсунку 67. Топливная форсунка 67 осуществляет прямой впрыск топлива в камеру 30 сгорания. В иных примерах топливная форсунка 67 может быть форсункой впрыска во впускные порты. Топливо к топливной форсунке 67 доставляется топливной системой, включающей в себя топливный бак 60, топливный насос 61 и топливную рейку (не показана). В топливную форсунку 67 может подаваться то же топливо, что и в топливную форсунку 66. Другая возможность предусматривает подачу в топливную форсунку 67 топлива другого вида, чем то, что подается в топливную форсунку 66. Рабочий ток к топливной форсунке 67 поступает от привода 6 контроллера 12. Для непосредственного приведения в действие топливной форсунки 67 на нее подается ток от привода 6. В других примерах привод 6 может быть выполнен с возможностью электрической регулировки гидравлического давления, подаваемого на топливную форсунку 67.
Привод может быть транзисторным, МОП-транзисторным, биполярным или другого типа.
В одном из примеров последовательная коммуникационная шина 3 включает в себя узлы, с которых различные контроллеры могут широковещательно передавать сообщения по коммуникационной шине. В каждом узле сообщения могут и отсылаться и приниматься, но не одновременно. Каждая широковещательная передача сообщения по сети включает идентификатор, задающий приоритет сообщения и данных сообщения. Если в коммуникационной шине сообщения отсутствуют, то осуществлять широковещательную передачу может любой контроллер, подключенный к указанной шине. Когда сообщения рассылаются одновременно двумя или несколькими контроллерами, то сообщение с доминирующим идентификатором затирает остальные идентификаторы таким образом, что остается только доминирующий идентификатор, и оставшиеся контроллеры только осуществляют мониторинг коммуникационной шины, но не осуществляют широковещательной передачи по ней. Таким образом, в последовательной коммуникационной шине арбитраж конфликтов осуществляется на основе приоритетов. В данном примере контроллер 12 широковещательно передает сообщения установок времени впрыска топлива с наивысшим приоритетом для обеспечения точной синхронизации впрыска топлива. Однако в некоторых условиях существует возможность широковещательной передачи установок времени впрыска топлива с несколько меньшим приоритетом. Данные ширины импульса впрыска топлива изначально посылаются и обновляются с частотой, обусловленной частотой вращения двигателя (например, количество цилиндров двигателя * 2 на каждые 720 градусов поворота коленчатого вала). Время прибытия данных ширины импульса впрыска топлива задает положение двигателя для программирования моментов начала и окончания впрыска топлива по углу поворота коленчатого вала. В сообщение, посылаемое по последовательной коммуникационной шине, включаются данные ширины импульса и частоты вращения двигателя. Время прибытия пакета данных (например, содержащего ширину импульса впрыска топлива) вместе с частотой вращения двигателя используются для расчета положения двигателя в промежутке между обновлениями положения двигателя.
Впускной коллектор 44 показан сообщающимся с опциональной дроссельной заслонкой 62 с электроприводом, регулирующей положение дроссельной шайбы 64 для изменения подачи воздуха от впускного воздуховода 42 во впускной коллектор 44. В качестве варианта может устанавливаться дроссельная заслонка с механическим приводом.
По команде контроллера 12 свеча 92 зажигания бесконтактной системы 88 зажигания подает искру зажигания в камеру сгорания 30. Универсальный датчик 126 содержания кислорода в отработавших газах (UEGO, Universal Exhaust Gas Oxygen) показан подсоединенным к выпускному каналу 48 выше по потоку от каталитического нейтрализатора 70. В ином варианте вместо датчика 126 UEGO может применяться датчик содержания кислорода в отработавших газах с двумя состояниями.
В одном варианте, каталитический нейтрализатор 70 может включать несколько блоков носителя. В другом варианте могут использоваться несколько устройств снижения токсичности отработавших газов, каждое с несколькими блоками носителя. В одном варианте каталитический нейтрализатор 70 может быть трехкомпонентным нейтрализатором.
Контроллер 12 на Фиг.1 показан в виде обычного микрокомпьютера, содержащего микропроцессорное устройство 102, порты 104 ввода/вывода, постоянное запоминающее устройство 106, оперативное запоминающее устройство 108, энергонезависимое запоминающее устройство 110 и обычную шину данных. Контроллер 12 показан принимающим различные сигналы отдатчиков, связанных с двигателем 10, дополнительно к тем сигналам, о которых говорилось выше, включая сигнал температуры хладагента двигателя (ЕСТ) от датчика 112, связанного с рубашкой 114 охлаждения; датчика 134 положения, связанного с педалью 130 акселератора для определения положения акселератора, изменяемого ногой 132; показания давления в коллекторе двигателя (MAP) от датчика 122 давления, связанного с впускным коллектором 44; сигнал положения коленчатого вала от датчика 118 на эффекте Холла, связанного с коленчатым валом 40; показания массы воздуха, входящего в двигатель от датчика 120; и показания положения дроссельной заслонки от датчика 58. Для обработки контроллером 12 может также измеряться барометрическое давление (датчик не показан). В предпочтительном варианте настоящего изобретения датчик 118 положения коленчатого вала, работающий на эффекте Холла, подает заданное количество равноотстоящих импульсов на каждый оборот коленчатого вала, по которому рассчитывается частота вращения двигателя (RPM).
В некоторых вариантах осуществления, на автомобилях с гибридным приводом двигатель может быть совмещен с системой электромотора/аккумуляторной батареи. Привод гибридного автомобиля может быть устроен параллельно, последовательно, или в вариантах сочетания этих конфигураций. Кроме того, в некоторых осуществлениях двигатель может быть и иным, например дизельным.
В процессе работы каждый цилиндр двигателя 10 типично проходит четырехтактный цикл, включающий: такт впуска, такт сжатия, такт расширения и такт выпуска. На такте впуска обычно выпускной клапан 54 закрывается, а впускной клапан 52 открывается. В цилиндр 30 поступает воздух по впускному коллектору 44, и поршень 36 перемещается в нижнюю часть цилиндра для увеличения внутреннего объема цилиндра 30. Положение, в котором поршень 36 находится внизу цилиндра в конце своего хода (то есть когда объем цилиндра 30 максимален), специалистами в данной области техники характерно называется нижней мертвой точкой (НМТ). На такте сжатия закрываются впускной клапан 52 и выпускной клапан 54. Поршень перемещается к головке цилиндра, сжимая при этом воздух внутри цилиндра 30. Положение, в котором поршень 36 находится в конце своего хода вверху цилиндра (то есть когда объем цилиндра 30 минимален), специалистами в данной области техники характерно называется верхней мертвой точкой (ВМТ). В процессе, который здесь и далее называется впрыском, в камеру сгорания вводится топливо. В процессе, который здесь и далее называется зажиганием, впрыснутое топливо поджигается известными средствами и способами, такими как свеча 92 зажигания и/или сжатие, в результате чего происходит воспламенение. На такте расширения расширяющиеся газы толкают поршень 36 обратно в НМТ. Коленчатый вал 40 преобразует перемещение поршня в момент вращения вала. Наконец, на такте выпуска открывается выпускной клапан 54, открывая отработавшей воздушно-топливной смеси путь в выпускной канал 48, а поршень возвращается в ВМТ. Следует отметить, что описание выше по тексту приведено только в качестве примера, и что моменты открытия или закрытия клапанов могут изменяться, например, для положительного или отрицательного перекрытия клапанов, позднего закрытия впускного клапана или по-другому.
На Фиг.2 подробно показан пример системы подачи топлива. Система подачи топлива включает в себя две группы топливных форсунок, представленных топливными форсунками 66 и топливными форсунками 67. Топливо из топливного бака 60 к топливным форсункам 67 доставляется посредством топливного насоса 61. Топливо из топливного бака 212 к топливным форсункам 66 доставляется через топливные клапаны-регуляторы 206 и 208 через регулятор давления 210. Давление в топливном баке 212 измеряется датчиком давления 214 и передается во вторичный топливный контроллер 1. Температура топлива измеряется датчиком температуры 216 и передается во вторичный топливный контроллер 1. Температура в той точке двигателя, где осуществляется впрыск топлива, измеряется датчиком температуры 218 и передается во вторичный топливный контроллер 1. Давление в той точке двигателя, где осуществляется впрыск топлива, измеряется датчиком давления 220 и передается во вторичный топливный контроллер 1. Вторичный топливный контроллер 1 может выдавать сигнал для управления указателем уровня топлива 204.
Контроллер 12 напрямую управляет форсунками 67 посредством приводов 6, которые показаны интегрированными в контроллер 12. Контроллер 12 передает команды ширины импульса впрыска топлива вторичному топливному контроллеру 1 по последовательной коммуникационной шине 3. Последовательная коммуникационная шина 3 может быть шиной локальной сети контроллеров (CAN). Контроллер 12 также может передавать цифровой сигнал вторичному топливному контроллеру 1 по линии 5. По линии 5 может передаваться сигнал цифрового шаблона, повторяющийся каждые два оборота двигателя или каждый рабочий цикл двигателя. Вторичный топливный контроллер 1 напрямую управляет форсунками 66 через приводы 8 в ответ на пакеты данных, передаваемые контроллером 12 вторичному топливному контроллеру 1 по единственной последовательной коммуникационной шине 3.
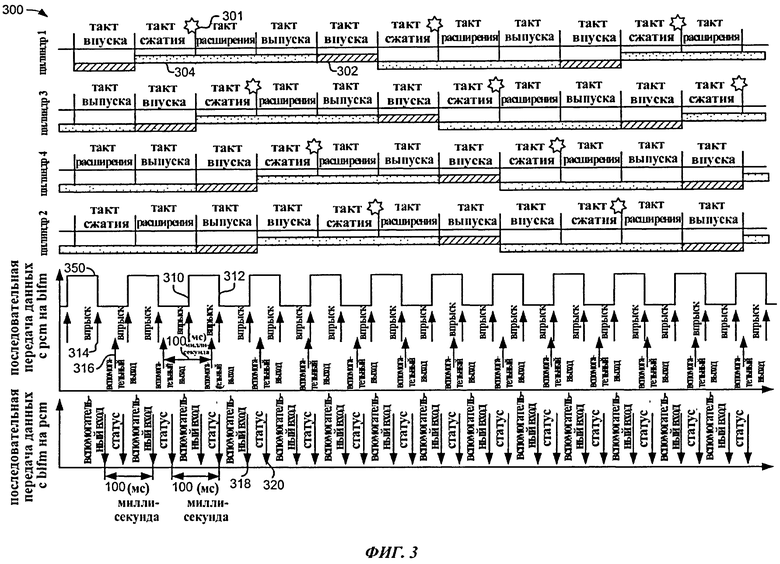
Далее на Фиг.3 показана смоделированная временная последовательность передачи данных и установок времени впрыска топлива по единственной последовательной коммуникационной шине. Последовательность 300 может быть получена посредством контроллера 12 и вторичного топливного контроллера 1, показанных на Фиг.1, выполняющих инструкции, заданные способами, показанными на Фиг.4 и Фиг.5 в системе, показанной на Фиг.1. Последовательность 300 иллюстрирует работу последовательной коммуникационной шины между контроллером двигателя и вторичным топливным контроллером четырехцилиндрового четырехтактного двигателя с порядком работы цилиндров 1-3-4-2. Отсчет времени ведется, начиная от левой стороны Фиг.3 по направлению к правой стороне Фиг 3.
Первые четыре сверху графика Фиг.3 описывают такты цилиндров 1-4 в процессе вращения двигателя. Такт впуска обозначен аббревиатурой INTAKE, такт сжатия обозначен аббревиатурой СОМР., такт расширения обозначен аббревиатурой EXPAN., а такт выпуска обозначен аббревиатурой ЕХН. Звездочкой 300 и аналогичными ей звездочками обозначены интервалы между моментами зажигания в цилиндрах.
Затушеванная область 304 представляет угловой диапазон, в котором для первого по номеру цилиндра при закрытом впускном клапане может быть осуществлен впрыск топлива во впускные каналы. Установки времени впрыска топлива (например, ширина импульса) для первого по номеру цилиндра могут также быть переданы во вторичный топливный контроллер 1 для управления топливными форсунками. Затушеванные области, аналогичные области 304, показывают интервалы времени впрыска топлива также для цилиндров со 2 по 4, причем расположение этих областей на оси времени соответствует сдвигу фаз между цилиндрами.
Заштрихованная область 303 представляет угловой диапазон, в котором может быть осуществлен впрыск топлива на двигателе с впрыском во впускные каналы в момент увеличения нагрузки двигателя с целью подачи в цилиндр дополнительного топлива для парирования увеличившейся нагрузки двигателя. К примеру, часть количества топлива, подающегося в течение рабочего цикла цилиндра, может быть подана в течение времени, соответствующего затушеванной области 304, а дополнительная порция топлива может быть подана при увеличении нагрузки двигателя в течение времени, соответствующего заштрихованной области 302. В случаях, когда вторичный топливный контроллер управляет форсунками прямого впрыска, топливо может впрыскиваться на такте впуска или такте сжатия цилиндра.
В те же моменты времени, которые описаны выше, топливо может подаваться и первичными топливными форсунками, управляемыми напрямую первичным контроллером. Кроме того, первичные топливные форсунки и вторичные топливные форсунки могут подавать топливо с разными установками по времени.
Пятый сверху график на Фиг.3 представляет собой временную последовательность сигналов, передаваемых в широковещательном режиме контроллером 12 вторичному топливному контроллеру 1. В одном примере последовательность 350 импульсов формируется внутри контроллера 12 на основе сигналов положения распределительного вала и коленчатого вала. Последовательность 350 импульсов включает в себя по одному импульсу для каждого цилиндра в течение рабочего цикла двигателя. Это означает, что для четырехцилиндрового четырехтактного двигателя за каждый оборот двигателя формируется два импульса. Нарастающий фронт 310 и спадающий фронт 312 импульса появляются при определенных углах поворота коленчатого вала. В некоторых примерах фронты 310 и 312 могут считаться фронтами сигнала Profile Ignition Pickup (PIP, модифицированный сигнал от датчика поворота коленчатого вала для расчета частоты вращения и положения двигателя). Например, нарастающий фронт 310 появляется за 10 градусов поворота коленчатого вала до ВМТ такта сжатия первого по номеру цилиндра. Спадающий фронт 312 появляется через 80 градусов поворота коленчатого вала после ВМТ такта сжатия первого по номеру цилиндра. Остальные импульсы последовательности 350 появляются для цилиндров со 2 по 4 на тех же углах поворота коленчатого вала. Таким образом, последовательность 350 импульсов повторяется каждый рабочий цикл двигателя и синхронизирована с положением двигателя.
Контроллер 12 выдает или широковещательно передает установки времени впрыска (то есть ширину импульса впрыска, момент начала открытия форсунки и/или момент завершения открытия форсунки в градусах поворота коленчатого вала) для каждой топливной форсунки, управляемой вторичным топливным контроллером 1 по асинхронной последовательной шине. Хотя шина и не синхронизирована, контроллер 12 передает сообщения по последовательному каналу через интервалы, синхронизированные с установками времени двигателя (например, на каждом нарастающем фронте импульса PIP). Так как сообщения, отсылаемые с частотой появления фронта PIP, обладают высоким приоритетом, то время задержки между отсылкой и приемом сообщения невелико. Передача данных о ширине импульса впрыска топлива в момент появления фронта PIP позволяет топливным форсункам работать в пределах 10 градусов поворота коленчатого вала от требуемого момента, что приемлемо, по меньшей мере, для впрыска топлива во впускной канал. В некоторых примерах моменты открытия форсунки для всех форсунок передаются широковещательно в одном пакете данных. В другом примере, где количество топливных форсунок превышает пороговое значение, установки времени впрыска топлива могут передаваться широковещательно по асинхронной последовательной шине в некотором числе пакетов данных в течение рабочего цикла двигателя. Команды открытия и закрытия форсунок широковещательно передаются через предустановленные интервалы угла поворота коленчатого вала, соответствующие появлению нарастающих и спадающих фронтов последовательности 350 импульсов. Одна ширина импульса впрыска топлива может обновляться на каждом фронте PIP по мере корректировки значения заряда воздуха в цилиндре в процессе вращения двигателя.
Контроллер 12 также выдает данные или команды иные, чем установки времени впрыска топлива, для управления вспомогательными выходами. В одном примере данные или команды управления вспомогательными выходами широковещательно передаются в предустановленные моменты времени, отличающиеся от предустановленных интервалов угла поворота коленчатого вала, которые используются для подачи команд управления топливной форсункой. Например, команды вспомогательных выходов могут выдаваться каждые 100 миллисекунд. Соответственно, вспомогательные выходы могут иметь меньший приоритет по сравнению с установками времени впрыска топлива. К вспомогательным выходным сигналам могут относиться, среди всего прочего, команды открытия и закрытия электромагнитного клапана, сигнал на указатель уровня топлива, а также коды диагностики РСМ.
В примере, иллюстрируемом Фиг.3, стрелка 314 и аналогичные ей стрелки обозначены аббревиатурой INJ. Стрелкой 314 обозначается момент, когда контроллером 12 по асинхронной последовательной шине во вторичный топливный контроллер 1 передаются обновленные данные установок времени топливной форсунки. Как показывает график, обновления установок времени топливной форсунки передаются на каждом нарастающем и спадающем фронте последовательности 350 импульсов. В одном примере установки времени впрыска снабжаются идентификатором высокого приоритета, что позволяет вторичному топливному контроллеру принимать сообщения своевременно. Широковещательная передача установок времени впрыска топлива на каждом нарастающем и спадающем фронте последовательности 350 импульсов позволяет обновлять установки времени впрыска таким образом, что количество впрыскиваемого топлива корректируется в ответ на изменение рабочих условий двигателя, в которых изменяется нагрузка двигателя. В одном примере сообщение установок времени впрыска имеет следующую структуру:
struct Msg020t
{
U32 sync_ctr:4;
U32 pip_edge:1;
U32pcm_t:18;
U32 inj_offset:8;
U16fuel_pw0;
U16fuel_pw1;
}
Msg020;
где Msg020 - номер сообщения; U32 представляет беззнаковую 32-битовую структуру, содержащую переменные sync_ctr, pip_edge, pcm_t, и inj_offset; где sync_ctr - номер цилиндра, для которого данный импульс представляет такт сжатия (то есть определяет тот цилиндр, с которым связаны нарастающий и спадающий фронт последовательности 350 импульсов (в которой широковещательно передаются установки времени впрыска)); где pip_edge указывает на то, на нарастающем или на спадающем фронте последовательности 350 импульсов было широковещательно передано сообщение установок времени впрыска топлива; где pcm_t - время широковещательной передачи сообщения контроллером 12 контроллеру 1; где inject_offset - сдвиг ширины импульса впрыска топлива; где fuel_pw0 - ширина импульса впрыска топлива для топливной форсунки, подающей топливо в первый по номеру цилиндр; и где fuel _pw1 - ширина импульса впрыска топлива для топливной форсунки, подающей топливо во второй по номеру цилиндр. Аналогичным образом могут передаваться сообщения установок времени впрыска для других цилиндров двигателя.
В примере, иллюстрируемом Фиг.3, стрелка 316 и аналогичные ей стрелки обозначены аббревиатурой AUX OUT. Стрелкой 316 обозначается момент, когда контроллером 12 по асинхронной последовательной шине во вторичный топливный контроллер 1 передаются данные управления вспомогательными выходами. Как показывает график, вспомогательные выходные сигналы подаются с определенным временным интервалом между обновлениями, который в данном примере составляет 100 миллисекунд. Широковещательно передавая обновления вспомогательным выходам через каждые 100 миллисекунд, можно сократить количество сообщений, передаваемых широковещательно по последовательной коммуникационной шине. Более того, в некоторых примерах сообщения вспомогательных выходов могут высылаться с приоритетом ниже, чем приоритет сообщений установок времени впрыска топлива. В одном из примеров сообщение вспомогательного выхода имеет следующую структуру:
struct Msg130t
{
U8:6;
U8 FRS:1;
U8 FTS:1;
U8 res[7];
}Msg020;
где Msg130 - номер сообщения; где U8 представляет беззнаковую 8-битовую структуру, содержащую переменные FRS и FTS; где шесть битов первого байта не используются; где FRS - заданное состояние соленоида регулятора подачи топлива; где FTS - заданное состояние соленоида топливного бака; и где оставшиеся семь битов остаются в резерве.
На шестом сверху графике Фиг.3 показана временная последовательность сигналов, передаваемых в широковещательном режиме вторичным контроллером 1 контроллеру 12. В одном примере сообщения, передающиеся широковещательно контроллером 1, передаются широковещательно через одинаковые промежутки времени (например, через 100 миллисекунд). Кроме того, некоторые сообщения могут передаваться с другой периодичностью, чем прочие сообщения.
Вторичный контроллер 1 выдает или широковещательно передает вспомогательные входные сигналы (например, давление и температуру топлива в точке впрыска топлива) по асинхронной последовательной шине. Вторичный контроллер 1 также выдает сигнал статуса контроллеру 12. Например, вторичный контроллер может обнаружить ухудшение работы форсунки и уведомить первичный контроллер об этом ухудшении.
В примере, иллюстрируемом Фиг.3, стрелка 318 и аналогичные ей стрелки обозначены аббревиатурой AUX IN. Стрелкой 318 обозначается момент времени, когда контроллером 12 по асинхронной последовательной шине во вторичный топливный контроллер 1 передаются обновления вспомогательных входов. Как показывает график, обновления данных вспомогательных входов выполняются с предустановленным интервалом по времени. В настоящем примере данные вспомогательных входов передаются в контроллер 12 каждые 100 миллисекунд, хотя данные вспомогательных входов могут широковещательно передаваться и с другой периодичностью. В одном примере сообщение вспомогательного входа имеет следующую структуру:
struct Msg140t
{
U16 FTP;
U16 FRP;
U8 FTT;
U8 FRT;
U8 res[2];
} Msg020;
где Msg140 - номер сообщения; где U16 представляет беззнаковую 16-битовую структуру; где FTP - значение давления в топливном баке в двухбитном формате; FRP - значение давления в топливной рейке в двухбитном формате; FTT - значение температуры в топливном баке в однобитном формате; FRT - значение температуры в топливной рейке в однобитном формате; и где два бита остаются в резерве.
Стрелка 320 и аналогичные ей стрелки обозначены меткой STATUS. Стрелкой 320 указаны моменты времени, в которые вторичным топливным контроллером 1 в контроллер 12 по асинхронной последовательной шине передаются данные статуса контроллера. Как показывает график, обновления статуса контроллера производятся через определенные промежутки времени, которые в данном примере составляют 100 миллисекунд. Широковещательно передавая обновления статуса контроллера через каждые 100 миллисекунд, можно сократить количество сообщений, передаваемых широковещательно по последовательной коммуникационной шине. В одном из примеров сообщение статуса контроллера имеет следующую структуру:
struct Msg 141t
{
U16 injA_degraded:2;
U16 injB_degraded:2;
U16 injC_degraded:2;
U16 injD_degraded:2;
U16 injE_degraded:2;
U16 injF_degraded:2;
U16 injG_degraded:2;
U16 injH_degraded:2;
U16 injl_degraded:2;
U16 injJ_degraded:2;
U16FRS_degraded:2;
U16FTS_degraded:2;
U8 res[5];
} Msg020;
где Msg141 - номер сообщения; где U16 представляет беззнаковую 16-битовую структуру, содержащую переменные injA-J_degraded, FRS_degraded и FTS_degraded; где injA-J - двухбитные переменные, определяющие рабочий статус топливных форсунок A-J, где FRS_degraded - двухбитная переменная, определяющая статус соленоида регулятора топлива; где FTS_degraded - двухбитная переменная статуса соленоида топливного бака; и где оставшиеся 5 бит остаются в резерве.
Таким образом, вторичный топливный контроллер 1 и контроллер 12 выполнены с возможностью широковещательной передачи друг другу сообщений по последовательной коммуникационной шине 3. Кроме того, контроллер 12 широковещательно передает вторичному топливному контроллеру 1 сообщения в моменты времени, синхронизированные с определенными угловыми положениями коленчатого вала двигателя, а также через предустановленные интервалы времени. В свою очередь вторичный топливный контроллер 1 широковещательно передает контроллеру 12 информацию о статусе, а также характерные входные данные топливной системы.
Показанные на Фиг.3 графики синхронизации являются репрезентативными, но не должны считаться ограничивающими. Кроме того, предполагаются и включаются в объем настоящего изобретения иные варианты синхронизации впрыска топлива.
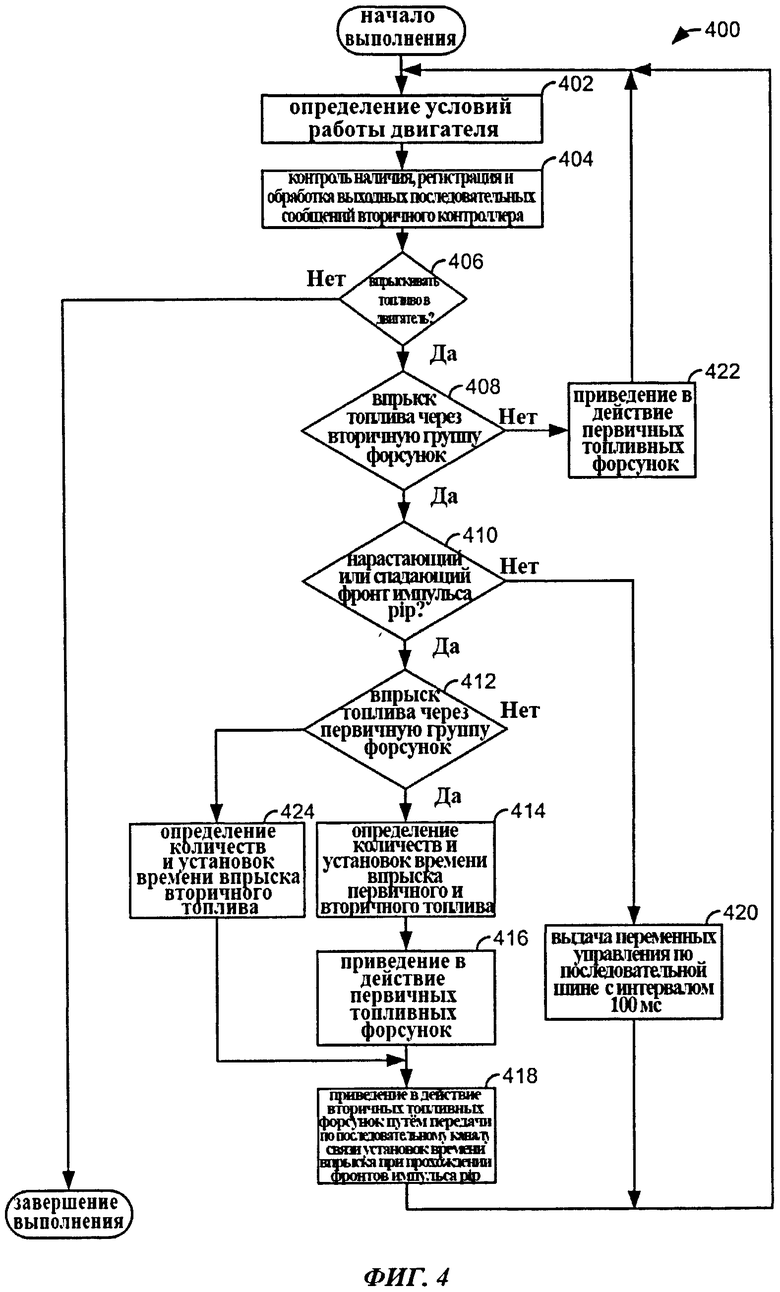
На Фиг.4 изображена блок-схема способа управления первым или первичным контроллером, посылающим второму контроллеру команды впрыска топлива по единственной последовательной коммуникационной шине. Способ, иллюстрируемый Фиг.4, может быть реализован по инструкциям, содержащимся в контроллере 12 системы, показанной на Фиг.1 и Фиг.2.
На этапе 402 способ 400 определяет условия работы двигателя. Условия работы двигателя могут включать кроме всего прочего частоту вращения двигателя, нагрузку двигателя, запрос крутящего момента от водителя, температуру двигателя, температуру воздуха двигателя и положение двигателя. После того как условия работы двигателя определены, способ 400 переходит к этапу 404.
На этапе 404 способ проверяет асинхронную коммуникационную шину на наличие широковещательной передачи по указанной шине данных от вторичного контроллера. Широковещательная передача данных первичному контроллеру может быть определена по идентификатору, являющемуся частью пакета данных, передаваемых по последовательной коммуникационной шине. В одном примере пакеты данных или сообщения могут быть ограничены восемью битами информации, не считая идентификатора сообщения. Если обнаруживается сообщение, то способ 400 читает сообщение и обновляет параметры управления в памяти по полученным данным. Параметры управления могут использоваться для определения установок времени впрыска для второй группы форсунок, управляемых вторичным контроллером (например, вторичным топливным контроллером), и для определения других параметров управления. После проверки последовательной коммуникационной шины на наличие широковещательной передачи от вторичного контроллера способ 400 переходит к этапу 406.
На этапе 406 способ 400 принимает решение о том, впрыскивать ли топливо в двигатель. Топливо может быть впрыснуто в двигатель в случае, если двигатель вращается и если водитель или контроллер считают работу двигателя желательной. Если способ 400 решает впрыскивать топливо в двигатель, то осуществляется переход к этапу 408 способа 400. В противном случае способ 400 переходит к завершению выполнения алгоритма.
На этапе 408 способ 400 принимает решение о том, впрыскивать или не впрыскивать топливо в двигатель через форсунки вторичной топливной системы. Вторичная топливная система может включать в себя вторичный контроллер, топливные форсунки и систему подачи топлива, что иллюстрируется Фиг.1 и Фиг.2. В одном примере способ 400 принимает решение о том, впрыскивать ли топливо в двигатель через форсунки вторичной топливной системы, исходя из количества топлива в первичном и вторичном топливном баках. В других примерах способ 400 принимает решение о том, впрыскивать ли топливо в двигатель через форсунки вторичной топливной системы, исходя из условий работы двигателя, например в ответ на нагрузку или детонацию двигателя. Если способ 400 решает впрыскивать топливо через вторичные топливные форсунки, то осуществляется переход к этапу 410 способа 400. В противном случае способ 400 переходит к этапу 422, на котором подача топлива в двигатель осуществляется только первичными топливными форсунками.
На этапе 422 способ 400 приводит в действие первичные топливные форсунки для подачи первого топлива в двигатель. Первичные топливные форсунки могут быть выполнены с возможностью прямого управления от первичного контроллера. В одном примере, установки времени впрыска топлива определяются исходя из положения двигателя, частоты вращения двигателя и нагрузки двигателя. Количество топлива, подаваемого в цилиндры двигателя, может увеличиваться по мере увеличения нагрузки двигателя. Кроме того, первичные топливные форсунки могут определять момент открытия форсунки, исходя из положения двигателя так, чтобы топливо подавалось тогда, когда впускной клапан закрыт, когда впускной клапан открыт, или в течение определенного такта рабочего цикла двигателя (например, в течение такта сжатия). После приведения в действие первичных топливных форсунок способ 400 возвращается на этап 402.
На этапе 410 способ 400 принимает решение о том, присутствует или нет нарастающий или спадающий фронт генерируемого внутренне цифрового сигнала (например, последовательности 350 на Фиг.3), по которому определяется положение двигателя. Нарастающий и спадающий фронты представляют основу для синхронизации широковещательной передачи команд впрыска топлива первичным контроллером вторичному топливному контроллеру по асинхронной последовательной коммуникационной шине. При обнаружении нарастающего или спадающего фронта способ 400 переходит к этапу 412. В некоторых примерах по нарастающему и/или спадающему фронту могут генерироваться аппаратные прерывания для запуска обновления данных ширины импульса впрыска топлива и широковещательной передачи установок времени впрыска топлива. Если никаких фронтов не обнаруживается, то способ переходит к этапу 420.
На этапе 420 способ проверяет статус таймера для определения того, истекло ли предустановленное время с момента выдачи через первичный контроллер синхронизируемых последовательных данных управления (например, вспомогательных выходов). Если предустановленное время истекло, то способ 400 широковещательно передает данные управления вспомогательных выходов на вторичный контроллер по последовательной коммуникационной шине. Таким образом, способ 400 выполняет обновление вспомогательных выходов с фиксированным предустановленным интервалом по времени. После завершения обновления вспомогательных выходов способ 400 переходит к завершению выполнения алгоритма.
На этапе 412 способ 400 принимает решение о том, впрыскивать или не впрыскивать топливо в цилиндры двигателя через первичную группу топливных форсунок. В одном примере топливо можно впрыскивать в двигатель только в определенных условиях работы двигателя. Например, топливо впрыскивают в двигатель через первичную группу топливных форсунок, только когда нагрузка двигателя больше или меньше порогового значения. Если принимается решение подавать топливо и через первичные, и через вторичные форсунки, то способ 400 переходит к этапу 414. В противном случае топливо подается в двигатель исключительно вторичными топливными форсунками, и способ 400 переходит к этапу 424.
На этапе 424 способа 400 определяются количество и установки времени подачи вторичного топлива. Количество и установки времени подачи вторичного топлива могут быть определены по упорядоченным таблицам и функциям, содержащим эмпирически определенные установки времени подачи топлива, включая момент начала открытия форсунки, продолжительность пребывания форсунки в открытом положении и/или момент закрытия форсунки. Например, таблицы и функции могут быть составлены для определения продолжительности пребывания форсунки в открытом положении по частоте вращения и нагрузке двигателя. Кроме того, значения, полученные из таблиц, могут быть скорректированы по данным обратной связи от датчика состава воздушно-топливной смеси. После определения количества и установок времени подачи вторичного топлива способ 400 переходит к этапу 418.
На этапе 414 способа 400 определяются количества и установки времени подачи первичного и вторичного топлива. В одном примере количества первичного и вторичного топлива могут определяться по функциям или картам, содержащим эмпирически определенные значения, упорядоченные по частоте вращения и нагрузке двигателя. Одна или несколько таблиц могут содержать установки времени впрыска, включая момент начала открытия топливной форсунки, выраженный в углах поворота коленчатого вала, продолжительность пребывания форсунки в открытом положении или количество топлива, и/или момент закрытия форсунки, как для первичного, так и для вторичного топлива, подаваемых в двигатель. Кроме того, значения, полученные из таблиц, могут быть скорректированы по данным обратной связи от датчика состава воздушно-топливной смеси. В результате могут быть определены индивидуальные установки времени впрыска для обоих видов топлива, подаваемых через первичные и вторичные топливные форсунки. После определения количества и установок времени подачи первичного и вторичного топлива способ 400 переходит к этапу 416.
На этапе 416 способа 400 осуществляется управление первичными топливными форсунками согласно описанию этапа 422 выше по тексту. Например, для каждого из цилиндров двигателя могут быть определены индивидуальные импульсы впрыска топлива. Индивидуальные импульсы впрыска топлива выдаются топливным форсункам в эмпирически определенные моменты времени вращения двигателя с тем, чтобы топливо впрыскивалось в нужное время. В одном примере, где топливо впрыскивается во впускные порты, топливо может подаваться в двигатель так, как это показано на Фиг.3. После приведения в действие топливных форсунок способ 400 переходит к этапу 418, хотя в некоторых примерах приведение в действие первичных топливных форсунок может происходить одновременно с приведением в действие вторичных топливных форсунок или после него.
На этапе 418 способа 400 первичным контроллером вторичному контроллеру выдаются команды впрыска топлива, относящиеся ко второй группе топливных форсунок, подающих вторичное топливо в двигатель. Точнее, способ 400 выдает исправленные установки времени впрыска (например, момент открытия форсунки, ширину импульса впрыска топлива или продолжительность пребывания форсунки в открытом положении, момент закрытия форсунки), передающиеся первичным контроллером вторичному контроллеру по последовательной коммуникационной шине. Данные впрыска топлива могут выдаваться в моменты времени и в формате, которые описываются со ссылкой на Фиг.3. Данные впрыска топлива снабжаются отметками времени и доставляются с идентификатором цилиндра, чтобы вторичный контроллер мог определить положение двигателя. После того как исправленные установки времени впрыска выданы вторичному топливному контроллеру по асинхронной последовательной коммуникационной шине, способ 400 возвращается на этап 402.
Таким образом, целью способа, иллюстрируемого Фиг.4, является широковещательная передача первичным контроллером команд впрыска топлива и вспомогательных выходных команд вторичному контроллеру на основе положения двигателя и через фиксированные промежутки времени. Кроме того, способ согласно Фиг.4 разрешает первичному контроллеру принимать сообщения для обновления параметров управления по наблюдениям вторичного контроллера. В результате по последовательной коммуникационной шине между двумя контроллерами передается информация в объеме, достаточном для того, чтобы топливные форсунки второй группы топливных форсунок, управляемой напрямую вторичным контроллером, могли приводиться в действие в синхронизации с работой двигателя для обеспечения последовательного впрыска второго топлива.
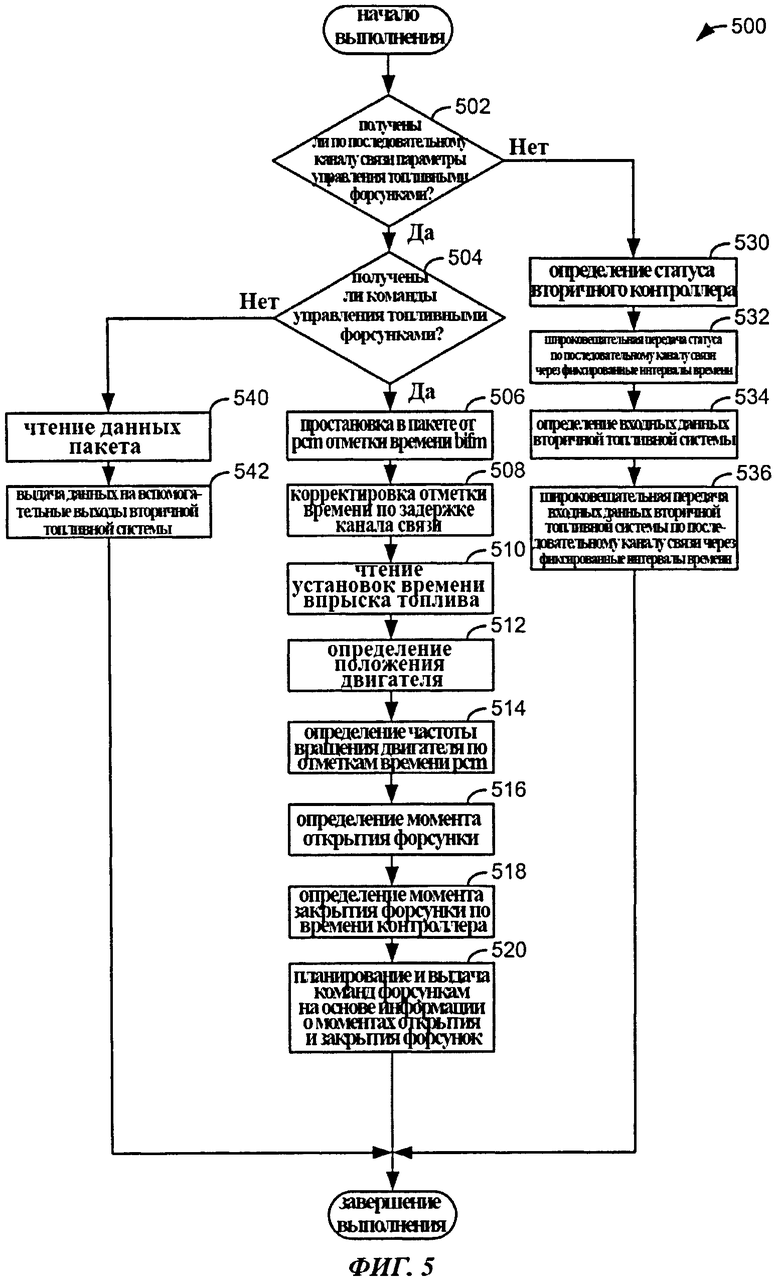
На Фиг.5 показана блок-схема примера осуществления способа управления вторым или вторичным контроллером, принимающим команды впрыска топлива от первичного контроллера по единственной последовательной коммуникационной шине. Способ, показанный на Фиг.5, может быть осуществлен по инструкциям, содержащимся в контроллере 1 в системе, показанной на Фиг.1 и Фиг.2.
На этапе 502 способ 500 оценивает, были ли получены вторым контроллером по последовательной коммуникационной шине параметры управления топливной форсункой. В одном примере вторичный контроллер проверяет последовательную коммуникационную шину на наличие сообщений, адресованных вторичному контроллеру. При наличии таковых сообщений, способ 500 переходит к этапу 504. В противном случае способ 500 переходит к этапу 530.
На этапе 530 способ 500 определяет статус вторичного контроллера. Например, статус вторичного контроллера кроме всего прочего может включать в себя данные об ухудшении работоспособности топливных форсунок в группе топливных форсунок, управляемых непосредственно вторым контроллером. Статус топливных форсунок может быть определен путем измерения напряжения или силы тока. Кроме того, также может определяться статус работоспособности центрального процессора вторичного контроллера путем проверки сторожевого таймера или аналогичного устройства. После определения статуса вторичного контроллера способ 500 переходит к этапу 532.
На этапе 532 способ 500 широковещательно передает статус вторичного контроллера по последовательной коммуникационной шине первичному контроллеру. В целях снижения загруженности последовательной шины статус вторичного контроллера может широковещательно передаваться через фиксированные интервалы времени (например, 100 миллисекунд). Сообщения, посылаемые через вторичный контроллер, обладают более низким приоритетом, чем сообщения, передаваемые через первичный контроллер. В некоторых примерах статус вторичного контроллера может высылаться только в случае обнаружения ухудшения работоспособности. Статус вторичного контроллера может широковещательно передаваться в формате, описанном со ссылкой на Фиг.3. После широковещательной передачи статуса вторичного контроллера способ 500 переходит к шагу 534.
На этапе 534 способ 500 определяет статус входных данных вторичной топливной системы (например, давления топлива и температуры топлива). Статус входных данных вторичной топливной системы может быть определен путем чтения цифровых и аналоговых сигналов на входе вторичного топливного контроллера. После определения входных данных вторичной топливной системы способ 500 переходит к этапу 536.
На этапе 536 способ 500 широковещательно передает входные данные вторичной топливной системы с вторичного контроллера на первичный контроллер по последовательной коммуникационной шине. В целях снижения загруженности шины входные данные вторичной топливной системы могут широковещательно передаваться через фиксированные интервалы времени (например, 100 миллисекунд). Входные данные вторичной топливной системы могут широковещательно передаваться в формате, описанном со ссылкой на Фиг.3. После широковещательной передачи входных данных вторичной топливной системы первичному контроллеру способ 500 переходит к завершению выполнения алгоритма.
На этапе 504 способ 500 оценивает, были ли получены вторичным контроллером по последовательной коммуникационной шине команды управления топливной форсункой. Если указанные команды были получены, то способ 500 переходит к этапу 506. В противном случае способ 500 переходит к этапу 540.
На этапе 540 способ 500 выполняет чтение пакета данных, полученного от первичного контроллера, и определяет, изменились ли какие-либо состояния вспомогательных выходов с момента получения последней команды вспомогательного выхода. После прочтения пакета данных способ 500 переходит к этапу 542.
На этапе 542 способ 500 выдает команды на вспомогательные выходы (например, соленоид регулятора топлива и указатель уровня топлива) вторичного контроллера. Вспомогательные выходы могут выдавать сигналы в цифровой и аналоговой форме. В некоторых примерах выходные сигналы, отсылаемые вторичному контроллеру, могут совмещаться с комбинационной логикой для воздействия на состояние других параметров управления вторичной топливной системы. В других примерах вспомогательные выходные сигналы могут приниматься и просто передаваться для изменения состояний вспомогательных выходов. После того как выполнено обновление вспомогательных выходов способ 500 переходит к завершению выполнения алгоритма.
На этапе 506 способ 500 помечает пакет данных временем вторичного контроллера. Отметка времени может быть осуществлена путем сохранения времени вторичного контроллера с пакетом данных. Отметка времени отражает внутреннее или локальное время вторичного контроллера. Отметка времени по вторичному контроллеру позволяет указанному контроллеру обеспечивать точный график выдачи или изменения состояния переменных, привязанных ко времени вторичного контроллера. Например, отметка времени по вторичному контроллеру позволяет указанному контроллеру определять, насколько долго была открыта топливная форсунка. Кроме того, отметка времени по вторичному контроллеру позволяет указанному контроллеру определять время между обновлениями топливных форсунок. После того, как пакет данных получает отметку времени, способ 500 переходит к этапу 508.
На этапе 508 способ 500 производит чтение и корректировку отметки времени первичного контроллера, хранящуюся вместе с данными управления форсункой, учитывая время запаздывания, затраченное на широковещательную передачу данных управления форсункой по последовательной коммуникационной шине. В одном примере, отметка времени первичного контроллера уменьшается на 2 миллисекунды, хотя могут быть калиброваны и другие времена для учета различных времен запаздывания. Следует отметить, что отметка времени, корректируемая на этапе 508, не является отметкой времени, проставляемой на этапе 506. Точнее, отметка времени, проставленная на этапе 506, корректировке не подвергается. После выполнения корректировки отметки времени первичного контроллера способ 500 переходит к этапу 510.
На этапе 510 способ 500 выполняет чтение установок времени впрыска топлива. Установки времени впрыска топлива могут включать в себя ширину импульса впрыска топлива, момент начала открытия топливной форсунки и/или момент закрытия топливной форсунки. В некоторых вариантах момент начала впрыска топлива может быть запрограммирован в виде постоянного углового положения для каждого цилиндра двигателя в целях сокращения объема параметров управления топливной форсункой, передаваемых по последовательной коммуникационной шине. Например, момент начала впрыска топлива для каждого цилиндра может быть определен как 120 градусов по коленчатому валу до ВМТ такта сжатия цилиндра, в который подается топливо. Что означает, что впрыск топлива в цилиндр начнется за 480 градусов поворота коленчатого вала до начала такта впуска цилиндра. Таким образом, можно широковещательно передавать меньшее число команд впрыска топлива. После выполнения чтения установок времени впрыска способ 500 переходит к этапу 512.
На этапе 512 способ 500 определяет текущее положение двигателя, используя данные управления впрыском топлива. Данные управления впрыском топлива включают в себя переменную syn_ctr, указывающую цилиндр, в настоящее время находящийся в конце такта сжатия или на такте расширения. В частности, значение переменной syn_ctr меняется на 1, когда первый по номеру цилиндр подойдет к ВМТ такта сжатия на 10 градусов по коленчатому валу, и не изменяется до тех пор, пока третий по номеру цилиндр не подойдет к ВМТ такта сжатия на 10 градусов по коленчатому валу, и тогда значение переменной syn_ctr поменяется на 3. Таким образом, параметр syn_ctr несет информацию о положении двигателя. Данные управления впрыском топлива также включают в себя переменную pip_edge, которая указывает на то, нарастающий или спадающий фронт проходит в момент отсылки команды управления впрыском топлива (например, пакета) первичным контроллером по последовательной коммуникационной шине. В одном примере нарастающий фронт соответствует положению двигателя в 10 градусов до ВМТ такта сжатия по коленчатому валу, а спадающий фронт соответствует положению двигателя на 80 градусов по коленчатому валу после ВМТ такта сжатия. Таким образом, по значениям переменных syn_ctr и pip_edge можно определить положение двигателя, при котором были выданы команды управления впрыском топлива. К примеру, если значение syn_ctr равно 1, а значение pip_edge равно 0 (нарастающий фронт), то двигатель находится в положении, соответствующем 10 градусам по коленчатому валу до ВМТ такта сжатия. Таким образом, второй контроллер может определить положение двигателя по времени получения данных по последовательной коммуникационной шине и по данным управления топливной форсункой, содержащимся в пакете данных.
В некоторых примерах, на вторичный контроллер может подаваться сигнал, отмеченный позиционным номером 5 на Фиг.1 и 2, и подобный последовательности 350 импульсов на Фиг.3. В таком случае основой для определения положения двигателя служат фронты сигнала и значение переменной syn_ctr. Например, нарастающий фронт соответствует положению коленчатого вала на 10 градусах до ВМТ такта сжатия, а спадающий фронт соответствует положению коленчатого вала на 80 градусах после ВМТ такта сжатия. Двигатель находится на 10 градусах недоворота коленчатого вала до ВМТ такта сжатия первого по номеру цилиндра, когда переменная syn_ctr равняется единице и зарегистрирован нарастающий фронт сигнала 350. Положение двигателя между фронтами сигнала может определяться по частоте вращения двигателя и времени, прошедшему с момента появления последнего фронта. К примеру, если частота вращения двигателя составляет 1000 об/мин (6 градусов в миллисекунду) и прошло 6 миллисекунд после появления последнего фронта по принятой команде управления топливной форсункой или по проводному сигналу, то можно определить, что положение двигателя изменилось на один градус поворота коленчатого вала. После того как положение двигателя определено, способ 500 переходит к этапу 514.
На этапе 514 способ 500 определяет частоту вращения двигателя на основе первичных отметок времени, извлеченных из пакетов команд управления топливными форсунками. Так как команды управления топливными форсунками отсылаются при нахождении двигателя в определенных положениях, то частоту вращения двигателя можно определить по отметкам времени отсылки данных управления топливной форсункой. Например, если первая команда управления топливной форсункой первичным контроллером была отослана в момент времени 1000 мс (по тактовому генератору первичного контроллера), а вторая команда управления топливной форсункой была отослана первичным контроллером в момент времени 1024 мс (по тактовому генератору первичного контроллера) и между отсылками указанных команд положение двигателя изменилось на 90 градусов по коленчатому валу, то можно рассчитать, что частота вращения двигателя составляет 625 оборотов в минуту (то есть (90/24 градус/мс) * (1/360 оборот/градус) * (60000/1 мс/мин)). После того как определена частота вращения двигателя, способ 500 переходит к этапу 516.
На этапе 516 способ 500 определяет момент открытия топливной форсунки. Момент открытия топливной форсунки определяется по времени регистрации фронтов повторяющегося проводного цифрового сигнала 5, показанного на Фиг.1 и 2, или относительно моментов времени отсылки первичным контроллером команд управления топливными форсунками, так как команды первичного контроллера по управлению топливными форсунками отсылаются в привязке к положению двигателя. Например, если требуется, чтобы впрыск топлива в определенный цилиндр начался за 480 градусов по коленчатому валу до начала такта впуска указанного цилиндра, то таймер можно запрограммировать на обратный отсчет времени, которое потребуется двигателю на преодоление расстояния от положения момента регистрации фронта или получения сигнала управления топливной форсункой до положения, когда нужно открыть топливную форсунку. Топливная форсунка может быть приведена в действие, когда таймер отсчитает до нуля. В других примерах при необходимости отсчет может быть прямым. После того, как определен момент и положение открытия топливной форсунки, способ 500 переходит к этапу 518.
На этапе 518 способ 500 определяет продолжительность пребывания форсунки в открытом положении. Способ 500 берет значение продолжительности пребывания форсунки в открытом положении из команды управления топливной форсункой, чтение которой выполняется на этапе 510. Тем не менее, длительность пребывания форсунки в открытом положении основывается на времени вторичного контроллера. К примеру, если на этапе 510 продолжительность пребывания форсунки в открытом положении была определена в 60 мс, то способ 500 для прямого или обратного отсчета 60 мс с момента открытия форсунки использует тактовый генератор вторичного контроллера. После того как определена продолжительность пребывания форсунки в открытом положении способ 500 переходит к этапу 520.
На этапе 520 способ 500 выдает команды топливным форсункам путем подачи приводам команд на подачу тока или прекращение подачи тока к определенным топливным форсункам. Например, если должна открыться топливная форсунка, подающая топливо в первый по номеру цилиндр, то счетчик может выполнить прямой или обратный отсчет предустановленного времени с момента регистрации фронта или получения команды, синхронизированной с определенным положением двигателя. Форсунка приводится в действие путем подачи на нее тока после того, как предустановленное время будет отсчитано счетчиком. Топливная форсунка закрывается после того, как второй счетчик отсчитает предустановленное время, определенное в команде топливной форсунке с привязкой к времени второго контроллера. Способ 500 переходит к завершению выполнения алгоритма после обновления выходов топливной форсунки.
Таким образом, вторичный контроллер получает команды управления топливной форсункой, такие как ширина импульса впрыска топлива, определяет положение двигателя и напрямую приводит в действие топливные форсунки, руководствуясь командами управления топливными форсунками. Дополнительно, вторичный контроллер корректирует вспомогательные выходы и передает информацию о статусе первичному контроллеру.
Лицами, обладающими средними познаниями в данной области техники, будет оценено то, что способы, описанные на Фиг.4 и Фиг.5, могут представлять один или любое количество алгоритмов расчета, таких как управляемые событиями, управляемые прерываниями, многозадачные, многопотоковые и т.д. Что подразумевает, что указанные различные этапы или функции могут выполняться в указанной последовательности, параллельно, а в некоторых случаях - могут опускаться. Точно так же указанный порядок обработки не важен для выполнения задач, достижения характерных особенностей и преимуществ, описываемых здесь, но служит для удобства иллюстрирования и описания. Хотя это не указано явным образом, но лицам, обладающим средними познаниями в данной области техники, будет очевидно, что один или несколько из иллюстрируемых этапов или функций могут выполняться повторно в зависимости от конкретной применяемой стратегии.
На этом описательная часть завершена. Ее прочтение специалистами в данной области техники стимулирует внесение многих изменений и модификаций, не выходящих за рамки замысла и охвата настоящего описания. Например, настоящее описание может быть с пользой применено на одноцилиндровых двигателях, а также на двигателях конфигураций I2, I3, I4, I5, V6, V8, V10, V12 и V16, работающих на природном газе, бензине, дизельном или альтернативном топливе.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДЛЯ ТОПЛИВНОЙ СИСТЕМЫ ДВИГАТЕЛЯ (ВАРИАНТЫ) И СИСТЕМА ДВИГАТЕЛЯ | 2014 |
|
RU2660738C2 |
| Способ подачи топлива в двигатель | 2016 |
|
RU2719504C2 |
| СПОСОБ ДЛЯ ДВИГАТЕЛЯ (ВАРИАНТЫ) И СИСТЕМА ДВИГАТЕЛЯ | 2015 |
|
RU2675421C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА РАСПРЕДЕЛЕННОГО ВПРЫСКА ТОПЛИВА ПОД ВЫСОКИМ ДАВЛЕНИЕМ | 2015 |
|
RU2706884C2 |
| СПОСОБ ОСТАНОВКИ ДВС | 2002 |
|
RU2242627C2 |
| ТОПЛИВНАЯ СИСТЕМА ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ И СПОСОБ ЕЕ ЭКСПЛУАТАЦИИ (ВАРИАНТЫ) | 2014 |
|
RU2647162C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА РЕГУЛИРОВАНИЯ ПОДАЧИ ТОПЛИВА В ЦИЛИНДРЫ ДВИГАТЕЛЯ | 2015 |
|
RU2707649C2 |
| СПОСОБ ДЛЯ ДВИГАТЕЛЯ (ВАРИАНТЫ) И СИСТЕМА ДВИГАТЕЛЯ | 2015 |
|
RU2676565C2 |
| СПОСОБ РАБОТЫ ДВИГАТЕЛЯ (ВАРИАНТЫ) И СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ | 2012 |
|
RU2609024C2 |
| СПОСОБ ДЛЯ ДВИГАТЕЛЯ (ВАРИАНТЫ) И СИСТЕМА ДВИГАТЕЛЯ | 2014 |
|
RU2656173C2 |
Изобретение может быть использовано в системах управления топливоподачей двигателей внутреннего сгорания (ДВС). Предложены система и способ подачи двух видов топлива в двигатель, с помощью двух групп топливных форсунок. Первый контроллер 12 непосредственно приводит в действие первую группу форсунок 67 и подает по последовательной коммуникационной шине команды для приведения в действие второй группы форсунок 66 на второй контроллер 1, принимающий команды и непосредственно приводящий в действие вторую группу форсунок 66. Первая группа топливных форсунок 67 и вторая группа топливных форсунок 66 выполнены с возможностью подачи в двигатель разных видов топлива. Система выполнена с возможностью упрощения подачи в двигатель топлива двух или более видов. 3 н. и 14 з.п. ф-лы, 5 ил.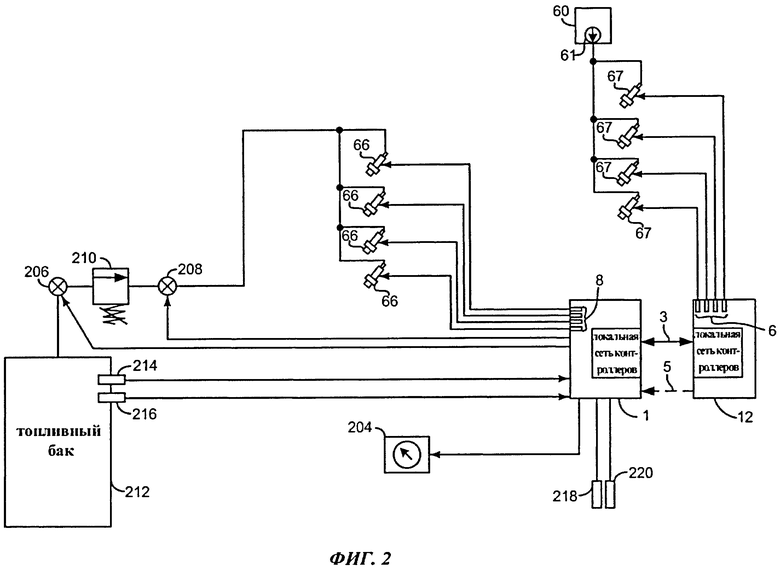
1. Система двигателя, содержащая первую группу топливных форсунок; вторую группу топливных форсунок; последовательную коммуникационную шину; первый контроллер, запрограммированный для непосредственного приведения в действие первой группы топливных форсунок и подачи по последовательной коммуникационной шине команд для приведения в действие второй группы топливных форсунок; и второй контроллер, запрограммированный для приема команд по последовательной коммуникационной шине и непосредственного приведения в действие второй группы топливных форсунок, причем первая группа топливных форсунок и вторая группа топливных форсунок выполнены с возможностью подачи в двигатель разных видов топлива, причем команды содержат данные ширины импульса впрыска топлива, при этом данные ширины импульса впрыска топлива пересылаются по последовательной коммуникационной шине в моменты времени, зависящие от определенных положений коленчатого вала двигателя.
2. Система по п. 1, отличающаяся тем, что последовательная коммуникационная шина является асинхронной последовательной коммуникационной шиной и включает в себя алгоритм арбитража конфликтов на основе приоритетов.
3. Система по п. 1, отличающаяся тем, что моменты времени зависят от нескольких событий процесса внутреннего сгорания в двигателе.
4. Система по п. 1, отличающаяся тем, что первый контроллер также запрограммирован для приема информации о статусе от второго контроллера.
5. Система по п. 1, отличающаяся тем, что второй контроллер также запрограммирован для перенаправления первому контроллеру по последовательной коммуникационной шине параметров управления подачей топлива.
6. Система двигателя, содержащая первую группу топливных форсунок; вторую группу топливных форсунок; первый контроллер, запрограммированный для выдачи команд первой группе топливных форсунок посредством первой группы инструкций и второй группе топливных форсунок посредством второй группы инструкций, причем первый контроллер запрограммирован для непосредственного приведения в действие первой группы топливных форсунок; и второй контроллер, запрограммированный для непосредственного приведения в действие второй группы топливных форсунок посредством второй группы инструкций, при этом второй контроллер также запрограммирован для оценки положения коленчатого вала двигателя по подаваемому на вход цифровому шаблону, повторяющемуся каждый рабочий цикл двигателя.
7. Система по п. 6, отличающаяся тем, что содержит единственную последовательную коммуникационную шину, электрически соединяющую первый контроллер со вторым контроллером, причем первый контроллер запрограммирован для широковещательной передачи второй группы инструкций второму контроллеру по указанной последовательной коммуникационной шине.
8. Система по п. 6, отличающаяся тем, что на указанный вход предусмотрено поступление отметки времени от первого контроллера, а второй контроллер дополнительно запрограммирован для оценки положения коленчатого вала двигателя по указанной отметке времени.
9. Система по п. 8, отличающаяся тем, что второй контроллер также запрограммирован для определения момента времени закрытия форсунок по моменту времени, в который второй контроллер принимает вторую группу инструкций.
10. Способ управления работой двигателя, включающий приведение в действие первой группы топливных форсунок, которое осуществляют напрямую через первый контроллер; передачу данных ширины импульса впрыска топлива от первого контроллера на второй контроллер по единственной асинхронной последовательной коммуникационной шине; и приведение в действие второй группы топливных форсунок, которое осуществляют напрямую через второй контроллер с использованием указанных данных ширины импульса впрыска топлива.
11. Способ по п. 10, отличающийся тем, что на второй контроллер передают сигнал, содержащий цифровой шаблон, повторяющийся каждый рабочий цикл двигателя.
12. Способ по п. 10, отличающийся тем, что во втором контроллере оценивают частоту вращения двигателя по отметке времени, получаемой от первого контроллера, и по данным положения коленчатого вала двигателя, передаваемым первым контроллером на второй контроллер.
13. Способ по п. 10, отличающийся тем, что данные ширины импульса впрыска топлива передают от первого контроллера на второй контроллер при нахождении коленчатого вала двигателя в определенных положениях.
14. Способ по п. 13, отличающийся тем, что второй контроллер выполнен с возможностью определения момента времени закрытия топливных форсунок по отметке времени второго контроллера, сделанной в момент получения вторым контроллером данных ширины импульса впрыска топлива от первого контроллера.
15. Способ по п. 10, отличающийся тем, что от второго контроллера первому контроллеру по единственной асинхронной последовательной коммуникационной шине направляют информацию о статусе.
16. Способ по п. 10, отличающийся тем, что от второго контроллера первому контроллеру по единственной асинхронной последовательной коммуникационной шине направляют входные данные вторичной топливной системы.
17. Способ по п. 10, отличающийся тем, что от первого контроллера второму контроллеру по единственной асинхронной последовательной коммуникационной шине направляют вспомогательные выходные данные.
| RU 2010115293 A, 27.10.2011 | |||
| ЭЛЕКТРОННЫЙ МОДУЛЬ УПРАВЛЕНИЯ | 1992 |
|
RU2082016C1 |
| US 5092305 A1, 03.03.1992 | |||
| US 5339782 A1, 23.08.1994 | |||
| US 20090287393 A1, 19.11.2009. | |||

