Изобретение относится к области авиации.
Известны комбинированные летательные аппараты из [1-7]. В них используются различные комбинации свойств вертолета, аэростата, самолета и планера. В аппаратах из [1-3, 5] заявлены постоянные свойства вертолетов и аэростатов. В устройстве из [4] объединены постоянные свойства аэростата и планера. В воздушном судне из [6] реализованы постоянные свойства аэростата и регулируемые свойства вертолета и самолета. В [7] описана конструкция с регулируемыми свойствами аэростата и самолета. Все они, кроме устройства из [5], предназначены для создания подъемной силы от 1000 кг и более. Все имеют одинаковые недостатки:
- низкая скорость и маневренность в процессе взлета и посадки;
- взлет и посадка производятся на аэродромах, оборудованных специальными техническими средствами, с помощью обслуживающего персонала;
- как правило, для парковки и стоянки требуются специальные устройства и закрытые помещения.
Воздушное судно из [6] выбрано в качестве прототипа, т.к. совпадает с заявленным устройством по наибольшему количеству признаков.
Заявлен комбинированный летательный аппарат который обладает регулируемыми свойствами вертолета, аэростата, самолета и планера (далее вестаплан) и может базироваться на водной поверхности, на твердых поверхностях и сооружениях с различными углами наклона.
Сущностью заявленного устройства является комбинирование в нем регулируемых свойств вертолета, аэростата, самолета и планера с помощью, входящих в его конструкцию, трансформируемого аэростата, изменяемой полужесткой подвесной системы и двигателей с винтовыми движителями, у которых направление вектора тяги может изменяться в вертикальной плоскости на 360°. Управляя этими средствами, изменяют геометрию, статические и динамические свойства заявленного устройства и реализуют свойства указанных летательных аппаратов. При этом у устройства имеются различные варианты базирования, сущностью которых является адаптация входящих в его конструкцию аэростата, подвесной системы и двигателей к следующим условиям парковки и стоянки:
- на твердой земной поверхности с уклоном до 30°,
- на вертикальном, жестком сооружении с отклонением от вертикали до 30°;
- на поверхности воды.
Адаптация производится для фиксации устройства в устойчивом положении на продолжительное время без посторонней помощи.
Заявленное устройство решает следующие задачи круглогодичной эксплуатации персонального авиатранспорта в различных климатических и атмосферных условиях:
- парковку и стоянку на неподготовленных площадках в горах, в лесу, в поле, на водоемах;
- парковку и стоянку в условиях городской застройки: на автопарковках и автостоянках; на пустырях и газонах, не доступных для автомобилей; на крышах обособленных гаражей, крышах и стенах многоэтажных зданий и сооружений;
- взлет/посадку и причаливание/отчаливание на указанных местах базирования без применения специальных технических средств и без помощи обслуживающего персонала;
- активное (с использованием двигателей), управляемое перемещение и маневрирование в воздушном пространстве;
- пассивное (без использования двигателей), управляемое перемещение и маневрирование в воздушном пространстве.
Конструкция вестаплана включает трансформируемый аэростат, состоящий из двух одинаковых жестких оболочек с несущим газом. Оболочки имеют жесткий каркас, задающий форму прямых цилиндров, основаниями которых являются половины аэродинамического профиля. С внешней стороны на основаниях цилиндра установлены баллоны, скругляющие плоские основания цилиндров. Оболочки связаны между собой цилиндрическим шарниром, размещенным на образующих, проходящих через угловую точку полуаэродинамического профиля, и управляемым замком, размещенным на другой стороне сечения. Если замок открыт, оболочки могут свободно вращаться вокруг оси шарнира, при этом над проемом, образующимся между оболочками, раскрывается обтекатель. Совмещая и замыкая части замка, оболочки фиксируют в положении, которое имеет форму прямого цилиндра с основаниями в виде полного аэродинамического профиля. В этом случае аэростат представляет собой цилиндрическое крыло, у которого хорда профиля больше высоты профиля и высоты цилиндра, а высота профиля меньше высоты цилиндра. На переднем и заднем концах крыла установлены бамперы, предохраняющие оболочки от повреждения. Снизу, в передней и задней частях крыла размещены поперечные балки, прикрепленные к каркасам оболочек. К балкам одними концами прикреплены стропы подвесной системы, предназначенные для управления углом поворота оболочек. Другими концами эти стропы прикреплены к органам управления в грузопассажирской кабине.
Снизу к аэростату на полужесткой подвесной системе подвешена несущая платформа. Подвесная система включает выполненные из композиционных материалов стропы управления оболочками аэростата, жесткие поворотные стойки и стропы управления поворотными стойками. Нижние концы поворотных стоек шарнирно прикреплены к верхней горизонтальной перекладине вертикальной рамы платформы, а через верхние концы поворотных стоек проходит ось вращения шарниров аэростатных оболочек. Поворот стоек на заданный угол и фиксация осуществляется стропами, которые одним концом прикреплены к верхним концам поворотных стоек, а другим концом прикреплены к органам управления в грузопассажирской кабине.
Несущая платформа выполнена из композиционных материалов и представляет собой горизонтальную решетчатую раму, на средней линии которой неподвижно установлена вертикальная рама с тремя проемами. В двух крайних проемах размещены двигатели с воздушными винтами, по одному в каждом проеме. Двигатели имеют возможность вращения и фиксации в заданном положении таким образом, что направления векторов тяги двигателей можно независимо изменять в профильной плоскости на угол до 180° в обе стороны от нулевого положения. Также на несущей платформе размещены:
- Неподвижно, в среднем проеме вертикальной рамы грузопассажирская кабина с местом пилота, грузопассажирским местом и органами управления аэростатом, поворотными стойками и двигателями. В кабине, кроме пилота, может быть размещен один пассажир и/или груз с ограниченным общим весом.
- Неподвижно, на нижней поверхности несущей платформы герметичные емкости, играющие роль шасси или поплавков.
Трансформируя аэростат и подвесную систему, изменяя обороты и направление вектора тяги двигателей, вестаплану задают следующие активные и пассивные режимы движения: вертикальный взлет, горизонтальное отчаливание, активный прямолинейный полет, маневрирование по курсу и высоте, планирование, парашютирование, дрейф, вертикальную посадку, горизонтальное причаливание.
Для базирования вестаплана на твердой горизонтальной поверхности с уклоном до 30° поворотные стойки фиксируют вертикально и перпендикулярно горизонтальной раме несущей платформы. Уменьшают высоту полета до касания герметичных емкостей несущей платформы с базовой поверхностью. Разомкнув замок аэростата, поворачивают оболочки аэростата до упора бамперов оболочек с базовой поверхностью. Затем стропами управления аэростатом фиксируют оболочки в этом положении, а несущую платформу прикрепляют к анкерами, выступающим из базовой поверхности. При этом над образовавшимся проемом между оболочками частично раскрывается обтекатель.
Для базирования вестаплана на поверхности воды поворотные стойки фиксируют вертикально и перпендикулярно горизонтальной раме несущей платформы. Уменьшают высоту полета до частичного погружения герметичных емкостей несущей платформы в воду. Разомкнув замок аэростата, поворачивают оболочки аэростата до упора с горизонтальной рамой несущей платформы, при этом погружают окончания оболочек с бамперами в воду. Затем стропами управления аэростатом фиксируют оболочки в этом положении. При этом над образовавшимся проемом между оболочками полностью раскрывается обтекатель.
Для базирования вестаплана на вертикальном, жестком сооружении с отклонением от вертикали до 30° поворотные стойки фиксируют вертикально и перпендикулярно горизонтальной раме несущей платформы. Предварительно установленные на бампере передней оболочки причальные крюки вводят в зацепление с одними анкерами, выступающими из базового сооружения. Поворачивая переднюю оболочку, опускают платформу до касания несущей платформы и базового сооружения и прикрепляют к другим анкерам, выступающим из базового сооружения.
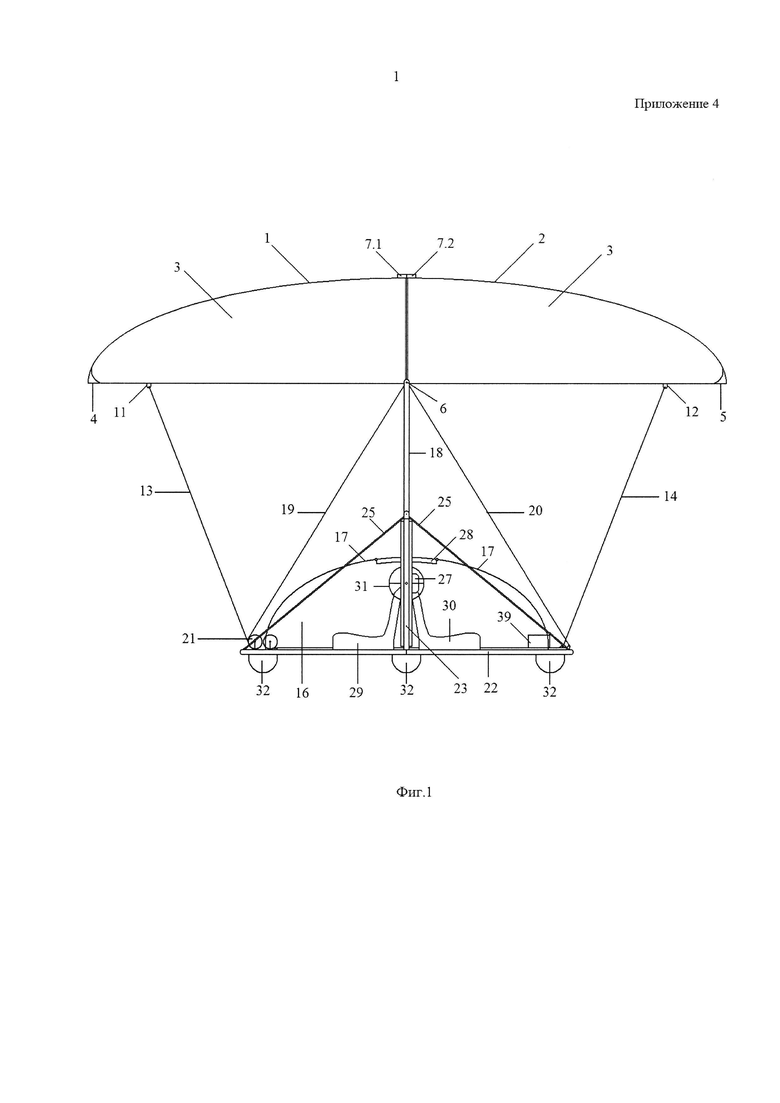
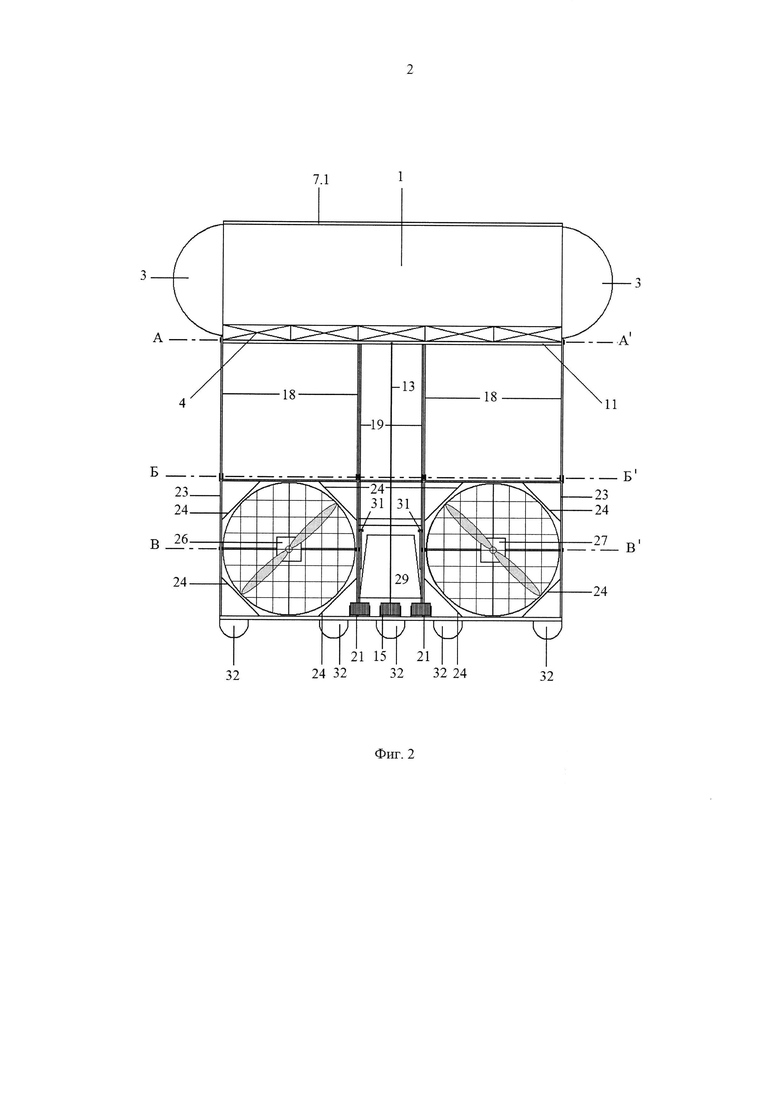
На фиг. 1, 2 изображены профильная и фронтальная проекции вестаплана в «исходном» положении:
- аэростат зафиксирован в форме крыла;
- поворотные стойки зафиксированы вертикально и перпендикулярно горизонтальной раме несущей платформы;
- векторы тяги двигателей ориентированы параллельно продольной оси, в сторону носовой части.
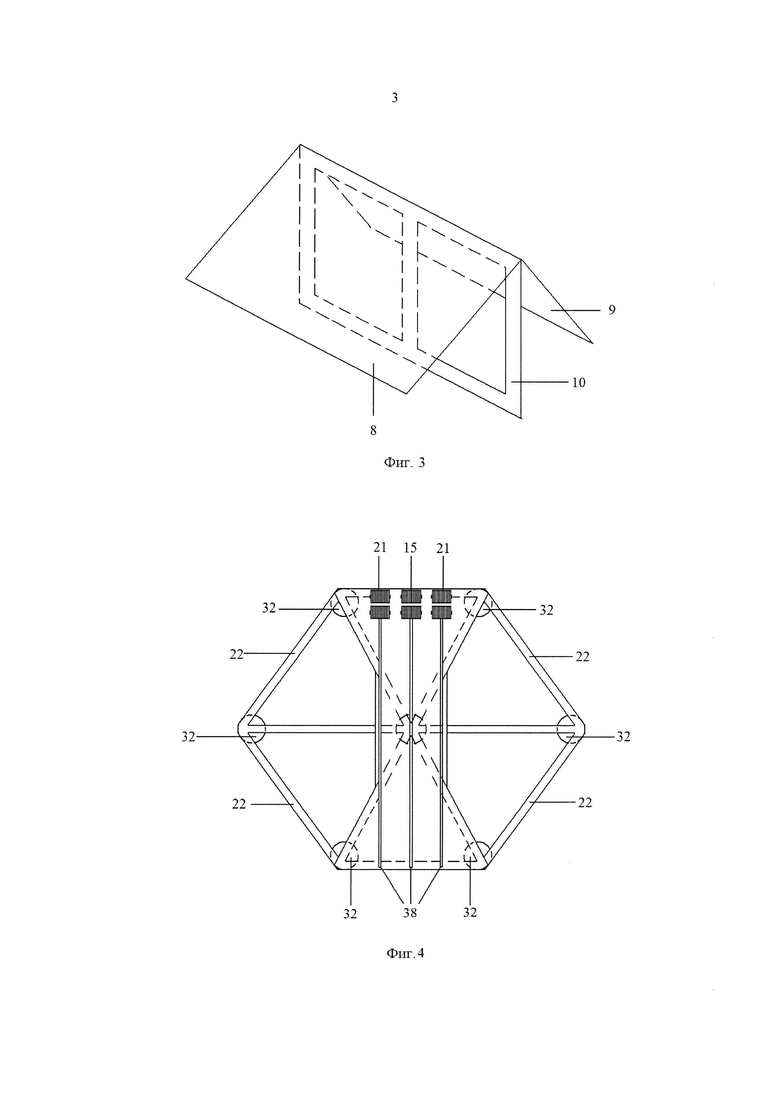
На фиг. 3 изображен обтекатель проема между оболочками.
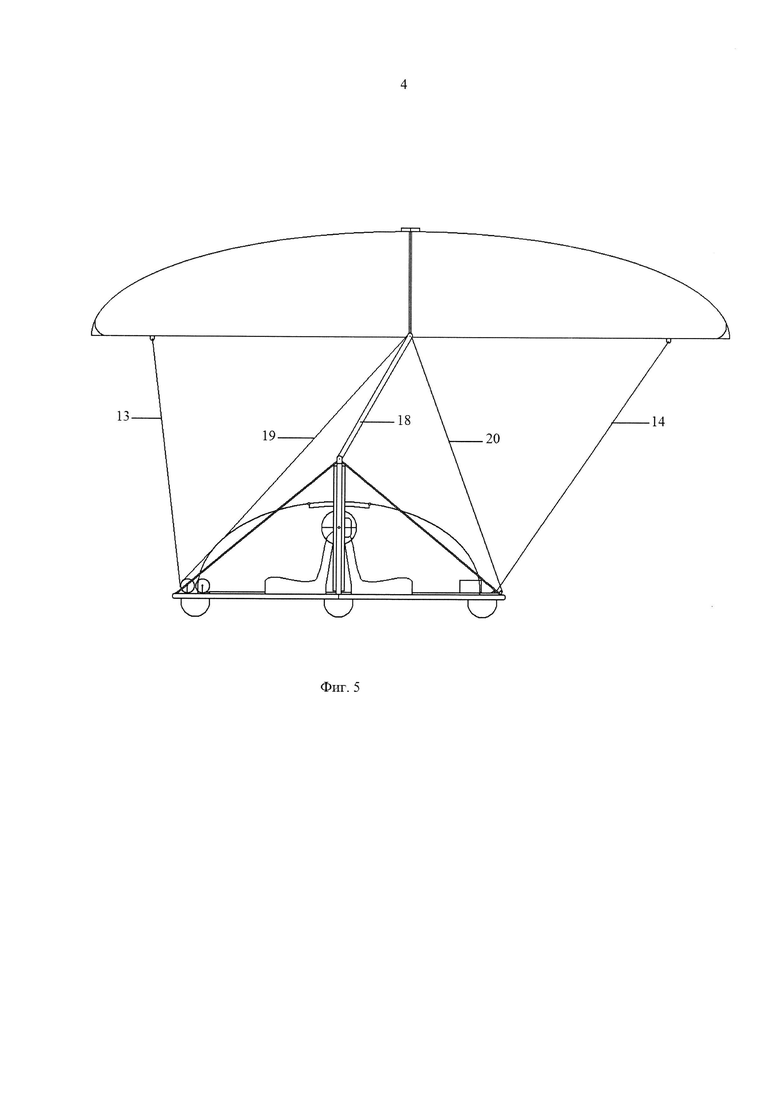
На фиг. 4 изображена горизонтальная проекция горизонтальной рамы несущей платформы вестаплана с днищем кабины пилота, на котором размещены строповые каналы, лебедки для управляющих строп и герметичные емкости в виде полусфер на нижней поверхности несущей платформы.
На фиг. 5 изображена профильная проекция вестаплана в полете со смещенным центром тяжести.
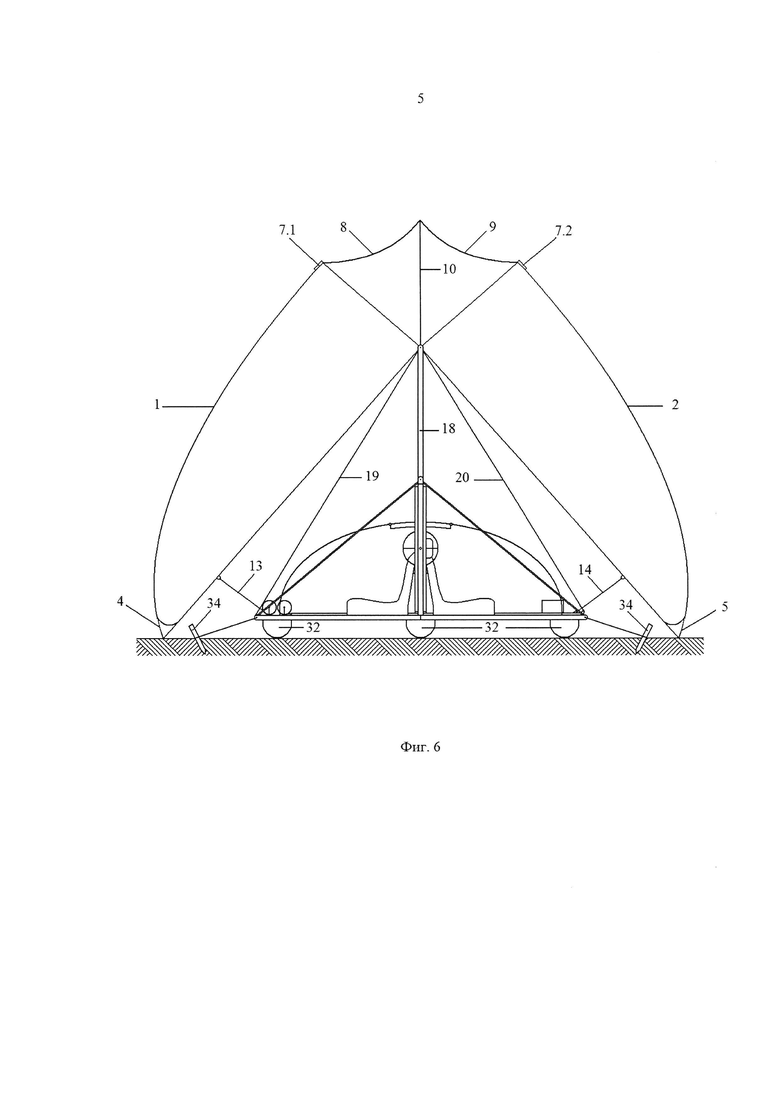
На фиг. 6 показана профильная проекция вестаплана, базирующегося на горизонтальной твердой поверхности.
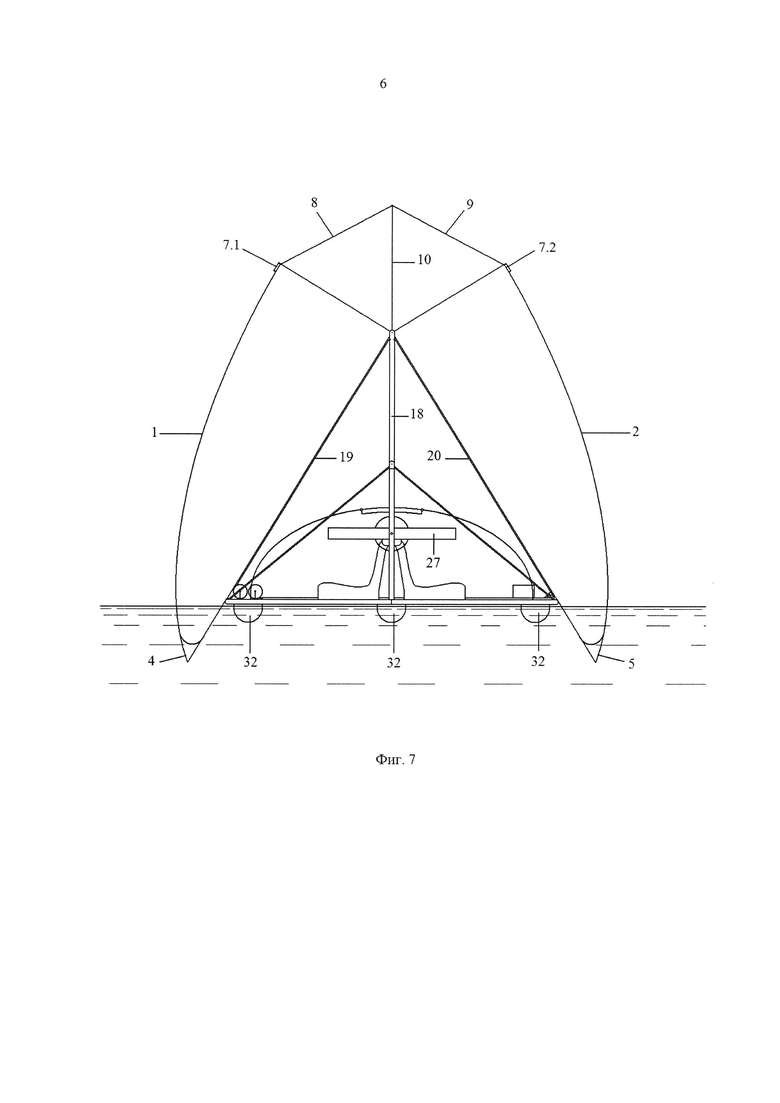
На фиг. 7 показан профильная проекция вестаплана, базирующегося на водной поверхности.
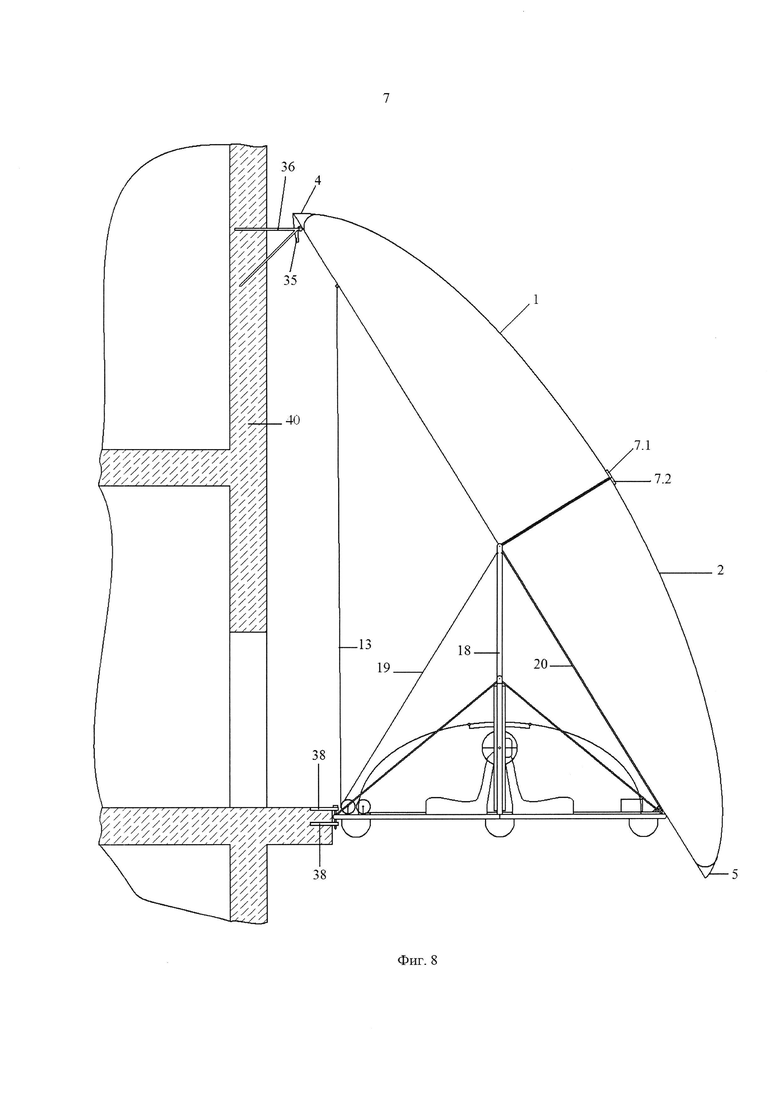
На фиг. 8 показана профильная проекция вестаплана, базирующегося на вертикальной стене с выступом, анкерами и выходом на горизонтальную поверхность.
Трансформируемый аэростат состоит из передней 1 и задней 2 оболочек (см. фиг. 1, 2). Оболочки имеют жесткие каркасы, выполненные из композиционных материалов и обтянутые парашютной тканью, внутри которых размещены баллонеты с гелием. Каркасы задают оболочкам форму прямых цилиндров, основания которых имеют форму первого и второго квадрантов эллипса, вытянутого по горизонтали и скругленного на окончаниях. С внешней стороны на основаниях цилиндра установлены баллоны 3, наполненные гелием и скругляющие плоские основания цилиндров до полукруглой формы. На окончаниях установлены передний 4 и задний 5 бамперы в виде ферм, выполненных из алюминиевого сплава. Бамперы жестко скреплены с каркасом. Оболочки связаны между собой цилиндрическим шарниром 6 с осью на линии АА′ и управляемым электромеханическим замком 7 на другой стороне стыка оболочек, состоящим из передней 7.1 и задней 7.2 частей. Управление замком осуществляется дистанционно, аналогично управлению дверными замками легковых автомобилей. Если замок открыт, оболочки могут вращаться вокруг оси шарнира 6, при этом над образующимся между оболочками проемом раскрывается обтекатель (см. фиг. 3). Обтекатель состоит из двух одинаковых полос парашютной ткани 8 и 9, каждая из которых одной стороной прикреплена к соответствующей оболочке, а другой стороной прикреплена к верхней планке жесткой рамки 10, выполненной из углепластика. Нижняя часть рамки 10 шарнирно закреплена на оси шарнира 6. Если оболочки плотно прижаты друг к другу, обтекатель зажат межу ними в сложенном состоянии. При закрытом замке оболочки фиксируются в форме прямого цилиндра с основаниями в виде полу эллипсов со скругленными передним и задним носиками, которые спереди и сзади защищены бамперами 4 и 5, а справа и слева баллонами 3. В этом случае аэростат представляет собой цилиндрическое крыло, у которого хорда профиля (длина крыла) больше высоты профиля (толщины крыла) и высоты цилиндра (ширины крыла), а высота профиля меньше высоты цилиндра. В передней и задней частях крыла на каркасах оболочек размещены поперечные балки 11 и 12, к которым одними концами прикреплены передняя 13 и задняя 14 стропы, предназначенные для поворота крыла или составляющих его оболочек вокруг оси шарнира 6. Другими концами стропы 13 и 14 прикреплены к органам управления 15 в грузопассажирской кабине 16 с обтекателем 17.
Снизу к аэростату на полужесткой подвесной системе подвешена несущая платформа. Подвесная система включает: стропы управления крылом 13 и 14; поворотные стойки 18; стропы управления поворотными стойками 19 и 20. Нижние концы поворотных стоек шарнирами, оси которых размещены на линии ББ′, прикреплены к верхней горизонтальной перекладине вертикальной рамы несущей платформы, а через верхние концы стоек проходит ось шарнира 6. Поворот стоек на заданный угол и фиксация осуществляется парами передних 19 и задних 20 строп, которые одними концами прикреплены к верхним концам поворотных стоек, а другим концами прикреплены к органам управления 21 в кабине 16.
Несущая платформа образована горизонтальной решетчатой рамой 22 (см. рис. 4), на которой неподвижно установлена вертикальная рама 23, имеющая три проема. Жесткость несущей платформы обеспечивается растяжками 24 и 25. В среднем проеме вертикальной рамы неподвижно размещена грузопассажирская кабина 16, а в двух крайних размещены парамоторы 26 и 27 с воздушными винтами, мембранными карбюраторами и электрическими стартерами. Парамоторы установлены в подшипниках, на осях вращения, которые расположены на линии ВВ′. Они имеют возможность вращения вокруг этих осей и фиксации в заданном положении таким образом, что направления их векторов тяги можно независимо друг от друга изменять в профильной плоскости на 360°, от -180° до +180°. Нулевым является положение, когда плоскость вращения винтов совпадает с плоскостью вертикальной рамы 23, а векторы тяги направлены к передней части вестаплана.
Грузопассажирская кабина 16 имеет плоские прозрачные боковые стенки из прозрачного пластика и открывающийся вверх обтекатель из прозрачного пластика. На внутренней стороне крыши кабины расположена приборная доска 28. На днище кабины (см. фиг. 4) размещены место пилота 29, грузопассажирское место 30, органы управления аэростатом 15 и органы управления поворотными стойками 21 и поворотом двигателей 31. Органы управления 15 и 21 - это лебедки, вращая которые можно изменять длину строп и соответственно изменять угол поворота оболочек или угол поворота поворотных стоек. При этом передние стропы прикреплены к передним лебедкам, а задние стропы через строповые каналы 38 к задним лебедкам. Органы управления поворотом двигателей 31 - это рулевые колеса с редуктором и фиксатором, размещенные на стойках среднего проема вертикальной рамы 23 и связанные с осями вращения корпусов двигателей 26 и 27. Электропитание электрических устройств вестаплана осуществляется аккумуляторной батареей 39. В кабине могут находиться один пилот, один пассажир и/или груз с ограниченным общим весом.
Герметичные емкости 32, выполненные из прочного пластика и наполненные воздухом, установлены неподвижно на нижней поверхности горизонтальной рамы 22. При базировании на твердой поверхности они играют роль шасси, а при посадке на воду роль поплавков.
Трансформируя аэростат и подвесную систему, изменяя обороты и направление вектора тяги двигателей, вестаплану задают следующие активные (с ненулевым вектором тяги двигателей) и пассивные режимы движения: вертикальный взлет, горизонтальное отчаливание, активный прямолинейный полет, маневрирование по курсу и высоте, планирование, парашютирование, дрейф, вертикальную посадку, горизонтальное причаливание. На фиг. 5 изображена профильная проекция вестаплана в режиме прямолинейного активного полета, со смещенным к носовой части центром тяжести для компенсации крутящего момента от напора встречного потока воздуха.
Для базирования вестаплана на твердой поверхности (см. фиг. 6) поворотные стойки 18 фиксируют вертикально и перпендикулярно горизонтальной раме платформы. Уменьшают высоту полета до касания герметичных емкостей 32 с базовой поверхностью, размыкают замок 7 аэростата, поворачивают оболочки аэростата вниз, до упора бамперов 4 и 5 с базовой поверхностью и стропами 13 и 14 фиксируют оболочки в этом положении. Затем тросами 33 прикрепляют несущую платформу к анкерами 34. При этом над образовавшимся проемом между оболочками частично раскрывается обтекатель, образованный элементами 8, 9 и 10.
Для базирования вестаплана на поверхности воды (см. фиг. 7) поворотные стойки 18 фиксируют вертикально и перпендикулярно горизонтальной раме несущей платформы. Уменьшают высоту полета до частичного погружения герметичных емкостей 32 в воду, размыкают замок 7 аэростата, поворачивают оболочки аэростата вниз до упора с горизонтальной рамой 22 и погружают окончания оболочек и бамперы 4 и 5 в воду. Затем стропами 13, 14 фиксируют оболочки в этом положении, при этом над образовавшимся проемом между оболочками полностью раскрывается обтекатель образованный элементами 8, 9 и 10.
Для базирования вестаплана на вертикальной стене 40 с выступом 41 (см. фиг. 8) поворотные стойки 18 фиксируют вертикально и перпендикулярно горизонтальной раме несущей платформы. Предварительно установленные на бампере 4 причальные крюки 35 вводят в зацепление с горизонтальными стержнями на кронштейнах 36 и, поворачивая переднюю оболочку, опускают платформу до упора с выступом - выходом на горизонтальную поверхность здания и прикрепляют вертикальным стержнем к анкерам 37. Такие анкеры и выступ с выходом могут быть установлены на «глухой» стене многоэтажного здания, например на брандмауэре, для причаливания непосредственно к месту работы или проживания.
Библиографические данные
1. Гибридный дирижабль конструкции А.И. Филимонова (Патент RU 2059530)
2. Вертостат (Патент RU 2066661)
3. Комбинированный летательный аппарат (Патент RU 2074101)
4. Планирующий аэростат (Патент RU 2104214)
5. Вертолетно-аэростатный комплекс (Патент RU 2104903)
6. Гибридное воздушное судно (Патент RU 2160689)
7. Дирижабль «Кристалл-трансформер» (Патент RU №2256584).
| название | год | авторы | номер документа |
|---|---|---|---|
| РАЗВЕДЫВАТЕЛЬНЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2023 |
|
RU2806574C1 |
| РЕЛЬСОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО ТИПА ТРАМВАЙНОГО ВАГОНА, МОТОРНОГО ВАГОНА ЭЛЕКТРОПОЕЗДА ИЛИ ЛОКОМОТИВА НА ЭЛЕКТРИЧЕСКОЙ ТЯГЕ, ТРАМВАЙНЫЙ ВАГОН С ПОНИЖЕННЫМ УРОВНЕМ ПОЛА | 2005 |
|
RU2294294C1 |
| ДИРИЖАБЛЬ "КРИСТАЛЛ-ТРАНСФОРМЕР" | 2004 |
|
RU2256584C1 |
| ГИБРИДНО-ТРАНСПОРТНАЯ СИСТЕМА "БУКСИР" | 2014 |
|
RU2566455C1 |
| СПОСОБ ПРИЧАЛИВАНИЯ ДИРИЖАБЛЯ И РЕАЛИЗУЮЩЕЕ УСТРОЙСТВО - ВОЗДУШНЫЙ ПРИЧАЛЬНЫЙ БУКСИР | 2006 |
|
RU2310581C1 |
| Воздухоплавательный аппарат | 2015 |
|
RU2612071C2 |
| Многоцелевая сверхтяжелая транспортная технологическая авиационная платформа укороченного взлета и посадки | 2019 |
|
RU2714176C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ВЫСОКОМАНЕВРЕННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 1997 |
|
RU2127693C1 |
| АВАРИЙНО-СПАСАТЕЛЬНЫЙ АЭРОМОБИЛЬНЫЙ ПОДЪЕМНИК | 2015 |
|
RU2585697C1 |
| Многоразовый модульный трансатмосферный аппарат | 2022 |
|
RU2787063C1 |
Изобретение относится к области авиации, в частности к конструкциям комбинированных аэростатических летательных аппаратов. Комбинированный летательный аппарат содержит аэростат с жестким каркасом, баллонетами и несущим газом, подвесную систему, несущую платформу с грузопассажирской кабиной, органами управления, двигателями, электрооборудованием и измерительными приборами. Аэростат состоит из двух оболочек, связанных поперечным цилиндрическим шарниром и выполненных с возможностью поворота и фиксации в виде крыла с аэродинамическим профилем или в виде Λ-образной фигуры с раскрывшимся обтекателем. Подвесная система включает жесткие и гибкие элементы и выполнена с возможностью трансформации и фиксации. Двигатели установлены с возможностью изменения направления их векторов тяги на угол от 0° до 360° в вертикальной плоскости и фиксации. Базирование устройства в устойчивом положении может осуществляться на твердой земной поверхности с уклоном, на водной поверхности, на вертикальном, жестком сооружении с отклонением от вертикали. Достигается возможность фиксации устройства на различных поверхностях. 4 н.п. ф-лы, 8 ил.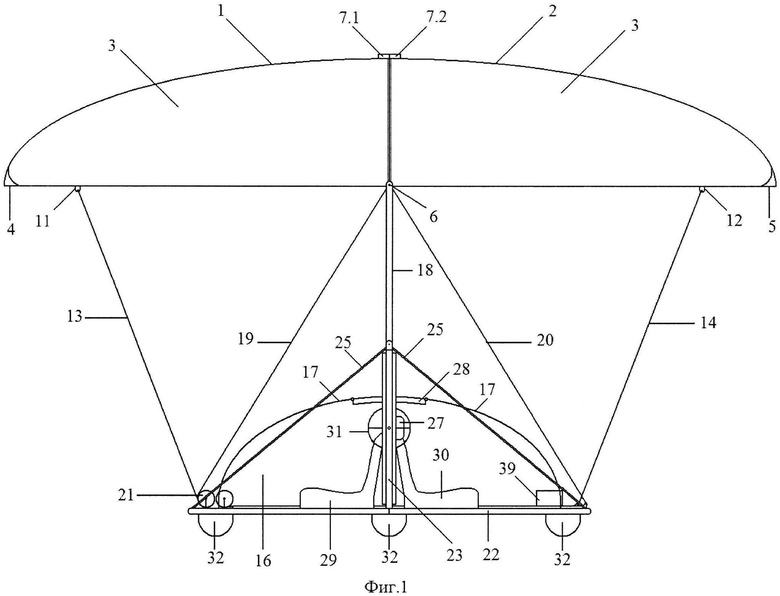
1. Комбинированный летательный аппарат, имеющий аэростат с жестким каркасом, баллонетами и несущим газом, подвесную систему, несущую платформу с грузопассажирской кабиной, органами управления, двигателями, электрооборудованием и измерительными приборами, отличающийся тем, что аэростат составлен из двух оболочек, связанных поперечным цилиндрическим шарниром и выполненных с возможностью поворота и фиксации в виде крыла с аэродинамическим профилем или в виде Λ-образной фигуры с раскрывшимся обтекателем, подвесная система включает жесткие и гибкие элементы и выполнена с возможностью трансформации и фиксации, двигатели установлены с возможностью изменения направления их векторов тяги на угол от 0° до 360° в вертикальной плоскости и фиксации.
2. Базирование устройства по п. 1 в устойчивом положении на твердой земной поверхности с уклоном отличается тем, что устройство зафиксировано в положении, когда несущая платформа устройства касается базовой поверхности и прикреплена к анкерам, выступающим из базовой поверхности, а оболочки аэростата повернуты вниз до касания с базовой поверхностью.
3. Базирование устройства по п. 1 в устойчивом положении на водной поверхности отличается тем, что устройство зафиксировано в положении, когда несущая платформа устройства касается водной поверхности, а оболочки аэростата повернуты вниз до погружения части оболочек в воду.
4. Базирование устройства по п. 1 в устойчивом положении на вертикальном, жестком сооружении с отклонением от вертикали отличается тем, что устройство зафиксировано в положении, когда дополнительно установленные на окончании передней оболочки причальные крюки введены в зацепление с одними анкерами, выступающими из базового сооружения, а несущая платформа касается базового сооружения и прикреплена к другим анкерам, выступающим из базового сооружения.
| ДИРИЖАБЛЬ "КРИСТАЛЛ-ТРАНСФОРМЕР" | 2004 |
|
RU2256584C1 |
| WO 2012125639 A1, 20.09.2012 | |||
| WO 9304916 A1, 18.03.1993 | |||
| АЭРОСТАТИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ (ВАРИАНТЫ) | 2011 |
|
RU2511500C2 |

