Область техники
Изобретение относится к устройству (аппарату) и способу для использования в системе, применяемой в лазерной хирургии глаза.
Уровень техники
В рефракционной офтальмологической хирургии рефракционные свойства глаза и, следовательно, его способность формировать изображения, изменяют посредством воздействия на глаз пациента, чтобы ослабить или скорректировать дефекты зрения. Одним из известных типов подобной операции является метод LASIK (Laser In-situ Keratomileusis - лазерный интрастромальный кератомилез). В этом методе выполняют плоский разрез роговицы, в результате которого образуется небольшой поверхностный диск (обычно именуемый специалистами как лоскут "flap"), который на одном участке остается прочно соединенным с роговицей посредством своего присоединенного края (ножки лоскута), по которому лоскут можно отогнуть вверх. В результате может быть открыта нижележащая роговичная ткань, в которой может быть произведена - посредством соответствующего лазерного излучения, обычно излучения эксимерного лазера - абляция в соответствии с заданным профилем, выбираемым в зависимости от дефекта зрения. Затем лоскут возвращают на место. Поскольку эпителий остается, по существу, неповрежденным, процесс заживления является относительно быстрым и безболезненным.
В классическом методе LASIK вырезание лоскута осуществляют механическим микрокератомом. Однако известно также вырезание лоскута посредством соответствующего лазерного излучения. Применительно к этому варианту специалисты используют термин "фемто-LASIK", поскольку до настоящего времени они применяли в этом методе импульсное лазерное излучение с длительностями импульсов в фемтосекундном диапазоне. Разумеется, следует учитывать, что разрезы в ткани роговицы человека можно осуществлять также и с меньшими или большими длительностями импульсов, лежащими, например, в аттосекундном или пикосекундном диапазоне. Поэтому далее применительно к методу LASIK, в котором вырезание лоскута выполняют с применением лазерной технологии, будет использоваться термин "LASIK с вспомогательным лазером".
Разумеется, описываемое далее изобретение может использоваться при осуществлении различных видов лечебного воздействия, в которых необходимо точно позиционировать лазерное излучение относительно глаза. Эти виды включают не только LASIK с вспомогательным лазером, но также, например, кератопластику (ламеллярную или сквозную) с использованием лазера, экстракцию роговичного лентикула с использованием лазера и другие хирургические воздействия, которые требуют выполнения внутрироговичных разрезов.
Лазерные системы, посредством которых можно выполнять разрезы в человеческом глазу (внутриглазные разрезы), в типичном варианте содержат так называемый аппликатор, снабженный контактным элементом, который прозрачен для используемого лазерного излучения и обеспечивает контактную поверхность, образующую плоскую опорную поверхность для глаза, подлежащего лечебному воздействию. Такие аппликаторы часто именуются также интерфейсом для пациента, поскольку они образуют (механический) интерфейс между лазерной системой и глазом. В свою очередь, аппликатор может быть связан разборным соединением, например, с фокусирующим объективом лазерной системы. При введении аппликатора в контакт с глазом таким образом, что поверхность глаза совпадает с контактной поверхностью, положение глаза может быть задано в координатной системе компонента лазерной системы, который отвечает за управление фокусом излучения. В результате становится возможным точное формирование внутриглазного разреза в требуемой точке.
Перед началом осуществления лазерного воздействия, служащего для формирования разреза (или, иными словами, контура разреза) в глазу, возникает проблема, состоящая в том, что положение пациента, глаз которого подлежит воздействию, должно быть согласовано с лазерной системой. Разрез, как правило, должен выполняться в строго определенном положении внутри глаза и, кроме того, - если проблема не касается симметричного контура - при его определенной ориентации относительно глаза. В частности, применительно к вырезанию лоскута в рамках метода LASIK данное требование означает, что разрез должен выполняться в том месте глаза, в котором затем должна производиться абляция ткани, поскольку лоскут должен будет покрывать аблированную зону. В то же время, вырезание лоскута создает асимметрию в форме ножки лоскута. При этом, если зона, аблируемая для осуществления коррекции, также обладает вращательной асимметрией, например, вследствие астигматизма, нетрудно понять, что ножка лоскута должна быть локализована определенным, оптимальным образом относительно выбранной аблируемой зоны, чтобы при минимально возможных размерах лоскута обеспечить, без каких-либо помех, возможность выполнения абляции во всех заданных зонах. Так, в случае астигматизма может оказаться желательным и необходимым расположить ножку лоскута определенным образом относительно астигматической части поверхности роговицы, т.е. относительно оси астигматизма.
Таким образом, требуемая настройка глаза пациента относительно лазерной системы может включать в себя не только позиционирование, но также и ориентирование глаза по отношению к лазерной системе. В контексте изобретения "ориентирование" означает настройку положения первой оси, которая характеризует продольное направление для первого протяженного объекта, относительно второй оси, которая характеризует продольное направление для второго протяженного объекта, или относительно заданной координатной системы.
До настоящего времени, как правило, принималось, что позиционирование пациента относительно лазерной системы выполняется оперирующим врачом вручную и, когда это возможно, под визуальным контролем с использованием микроскопа. В рамках этой процедуры врач обычно пытается установить аппликатор как можно более центрированно в отношении некоторых контуров глаза и придать ему требуемую ориентацию в отношении некоторых контуров глаза. Это может быть сделано, например, путем задания положения медицинской кушетки, на которой лежит пациент, и/или путем соответствующего маневрирования плечом консоли лазерной системы, несущей аппликатор. Поскольку аппликатор, в свою очередь, может прикрепляться к лазерной системе только в определенной ориентации, придание аппликатору заданной ориентации относительно глаза одновременно означает придание заданной ориентации относительно глаза лазерной системе в целом.
Недостаток такой процедуры состоит в том, что качество согласования ориентации зависит от опыта и квалификации врача, т.е. может, с той или иной вероятностью, варьировать в широких пределах. Кроме того, настройка, производимая вручную, занимает довольно длительное время. Однако обычно желательно сделать длительность операции как можно меньшей, чтобы, насколько это возможно, свести к минимуму неудобства для пациента. Чем больше времени занимает процедура фиксации глаза к аппликатору (в процессе которой врач, затрачивая значительные усилия, должен настроить и проконтролировать правильное положение аппликатора относительно глаза), тем более продолжительной будет операция в целом.
Раскрытие изобретения
Задача, на решение которой направлены варианты изобретения, состоит в сокращении продолжительности процесса установки на глаз аппликатора лазерной системы, пригодной для использования при выполнении внутриглазных разрезов.
Согласно изобретению предлагаются аппарат и способ с признаками, раскрытыми соответственно в пп. 1 и 16 прилагаемой формулы изобретения.
Предложенный аппарат для офтальмологической хирургической системы с использованием лазера (далее - хирургической системы) содержит первый блок формирования изображения, сконфигурированный для формирования первого изображения глаза, подлежащего лечебному воздействию. Аппарат содержит также компьютерное устройство, сконфигурированное с возможностью выполнять следующие операции:
(i) детектирование, посредством обработки первого изображения, по меньшей мере одной первой структуры глаза и определение положения и ориентации первой структуры в координатной системе, связанной с хирургической системой,
(ii) определение положения и ориентации, в указанной координатной системе, контура подлежащего выполнению внутриглазного разреза с учетом определенных указанным образом положения и ориентации первой структуры в указанной координатной системе и с учетом определенных ранее положения и ориентации по меньшей мере одной второй структуры глаза относительно первой структуры.
Первая структура может, в частности, соответствовать структуре глаза, детектируемой по получаемому изображению, например, радужной оболочки, зрачка, центра зрачка, лимба, кровеносных сосудов склеры и/или по распределению толщин роговицы. Вторая структура может, например, соответствовать астигматически деформированной области роговицы, которая может задаваться осью астигматизма. Если это представляется желательным, вторая структура может зависеть от свойств первой структуры. Например, представляется возможным определять астигматически деформированную область роговицы по распределению толщин роговицы. Разумеется, приведенные данные должны рассматриваться только как неограничивающие примеры. В качестве первой или второй структуры применимы и другие детектируемые структуры глаза. Например, пригодны также структуры глаза, детектируемые с использованием оптической когерентной томографии (ОКТ).
Как пример, в случае операции LASIK перед ее началом на диагностическом посту (диагностической станции) может быть получено изображение радужной оболочки оперируемого глаза и по этому изображению может быть детектирована, в качестве первой структуры, подходящая для этой цели структура глаза (например определенный кровеносный сосуд склеры или распределение толщин роговицы). Одновременно на диагностическом посту с помощью кератометра может быть исследована топография передней поверхности роговицы и могут быть выявлены показания кератометра, характеризующие осевое положение и степень развития астигматизма роговицы. Дополнительно или альтернативно, на этом посту может быть проведена, посредством ОКТ или измерений по принципу Шаймпфлюга (т.е. камерой Шаймпфлюга), пахиметрическая регистрация глаза, по которой может быть определено распределение толщин роговицы. Астигматическая область роговицы может служить второй структурой. При условии проведения на одном диагностическом посту регистрации радужной оболочки, кератометрии и пахиметрии, можно принять, что изображение радужной оболочки определенным образом привязано к осевому положению астигматической области, определенной в ходе кератометрии и/или пахиметрии. Другими словами, может быть получена опорная информация, которая характеризует положение и ориентацию астигматической области относительно первой структуры, например, в векторной форме.
Для проведения операции LASIK пациент может быть переведен из диагностического поста на хирургический пост, находящийся, например, в другом помещении медицинского учреждения. В рассматриваемом примере операция LASIK проводится с целью коррекции дефекта зрения, обусловленного астигматизмом, параметры которого были измерены, как это было описано. Более конкретно, необходимо вырезать лоскут таким образом, чтобы он покрывал астигматическую область с тем, чтобы после отгибания лоскута можно было провести, посредством лазерного излучения, абляцию в астигматической области. В этой связи особенно важно обеспечить приемлемое положение ножки лоскута относительно астигматической области. Необходимо, в частности, добиться, чтобы ножка лоскута находилась вне области, подлежащей абляции в процессе коррекции дефекта зрения. Другими словами, лоскут должен быть адаптирован к положению и ориентации астигматической области (и, если необходимо, к ее размерам).
В случае формирования лоскута может оказаться желательным, чтобы контур разреза задавал также вспомогательный канал, подведенный к поверхности разреза для образования лоскута, т.е. представляющий собой вспомогательный разрез, соответствующий части общего контура разреза. Такой вспомогательный канал, предпочтительно подведенный к поверхности разреза для образования лоскута в зоне ножки лоскута, может служить для выведения газов, которые образуются в глазной ткани при формировании разреза посредством фотодеструкции. Вспомогательный канал отходит от лоскута и может, например, проходить по меньшей мере в область лимба оперируемого глаза. На своем конце, удаленном от лоскута, он может выходить на поверхность глаза или заканчиваться в глубине глазной ткани. Например, он может заходить под конъюнктиву или проходить в склеру глаза.
Чтобы гарантировать, что вспомогательный канал всегда удовлетворяет требованию проходить по меньшей мере в область лимба, в предпочтительном варианте изобретения компьютерное устройство сконфигурировано с возможностью вырабатывать, с учетом определенных ранее положения и ориентации по меньшей мере тех частей контура разреза, которые задают лоскут, управляющие данные для формирования вспомогательного канала таким образом, чтобы он проходил по меньшей мере в область лимба глаза и предпочтительно даже за пределы лимба. Это позволяет генерировать управляющие данные для управления лазерным излучением, которые всегда согласуются с заданными положением и ориентацией лоскута, точнее с заданными положением и ориентацией тех частей контура разреза, которые задают лоскут. Это может потребовать, в частности, соответствующую адаптацию длины вспомогательного канала таким образом, чтобы он гарантированно проходил до лимба или за него.
Вспомогательный канал может быть, например, сформирован, по существу, плоским разрезом. Он может иметь, по существу, постоянную ширину по своей длине, хотя эта ширина может быть и переменной. Так, она может постоянно увеличиваться или уменьшаться, начиная от лоскута и до другого конца канала.
Целесообразно сформировать вспомогательный канал до начала формирования частей разреза, задающих контур лоскута.
В качестве альтернативы лоскута по методу LASIK, контур разреза может задавать экстрагируемый роговичный лентикул (lenticle). За счет экстракции из внутренней части роговицы участка ткани, имеющего соответствующую форму, также может быть достигнута рефракционная коррекция дефекта зрения. Удаляемый участок ткани именуется лентикулом, поскольку в типичном варианте он имеет форму, близкую к форме линзы. Поскольку геометрия лентикула зависит от корригируемого дефекта зрения, который часто не обладает вращательной симметрией, а, например, включает астигматизм, изобретение актуально также и в случае экстракции роговичного лентикула, т.к. позволяет согласовать контур разреза, задающего лентикул, в отношении его положения и ориентации, а также, когда это необходимо, формы и/или размеров с соответствующей второй структурой, например астигматически деформированной областью роговицы. Альтернативно или дополнительно, положение, ориентация и/или размеры контура разреза для лентикула могут быть согласованы с положением - определенным посредством технологии обработки изображения - центра зрачка глаза и/или распределения толщин роговицы глаза.
На хирургическом посту глаз пациента, подлежащий лечебному воздействию, может быть приведен в контакт с аппликатором лазерной системы и, тем самым, зафиксирован по отношению к аппликатору. После этого с помощью камеры лазерной системы может быть получено изображение глаза, так что компьютер лазерной системы сможет произвести, используя соответствующую программу обработки изображения, анализ этого изображения и детектировать в нем первую структуру, например определенный кровеносный сосуд или распределение толщин роговицы. Как только первая структура будет детектирована, компьютер сможет определить ее положение и ориентацию в координатной системе, связанной с лазерной системой. Затем, на основе вышеупомянутой опорной информации, компьютер сможет определить в той же координатной системе положение и ориентацию второй структуры. Используя полученное таким путем знание о положении и ориентации второй структуры (астигматической области) в координатной системе лазерной системы, компьютер сможет определить далее подходящий контур разреза для формирования лоскута и, если это требуется, для вспомогательного канала. В частности, компьютер может определить подходящее положение и ориентацию ножки лоскута в координатной системе лазерной системы, а также определить подходящую форму и/или размеры лоскута.
Поскольку эта процедура не требует никакой ручкой настройки оперирующим хирургом положения глаза пациента относительно лазерной системы, а, напротив, позволяет автоматически, с помощью компьютера, адаптировать положение и ориентацию контура разреза, длительность этапа, начиная с установки аппликатора на глаз и до начала фактического выполнения разреза, может быть непродолжительной. Это уменьшает для пациента неудобства, создаваемые операцией.
Как уже упоминалось, изобретение может найти применение, например, в ходе операций по методу LASIK, когда контур разреза будет задавать роговичный лоскут с ножкой лоскута и, когда это требуется, вспомогательный канал, служащий для выведения газов.
В предпочтительной конфигурации изобретения компьютерное устройство может быть выполнено с возможностью определять положение и ориентацию участка контура разреза, задающего ножку лоскута, в зависимости от положения и ориентации первой структуры в координатной системе, связанной с хирургической системой, и от положения и ориентации второй структуры относительно первой структуры.
В том случае, если по меньшей мере одна вторая структура содержит астигматически искривленную область роговицы, компьютерное устройство может быть сконфигурировано с возможностью определять положение и ориентацию контура разреза с использованием заданного условия, определяющего взаимное положение лоскута и астигматически искривленной области роговицы.
Например, с ножкой лоскута может быть ассоциирована ее ось, а с астигматически искривленной областью роговицы - ось астигматизма. При этом компьютерное устройство может быть сконфигурировано с возможностью определять положение и ориентацию контура разреза с использованием заданного условия, определяющего взаимное положение оси ножки лоскута и оси астигматизма. Это заданное условие может, например, задавать, по существу, взаимно перпендикулярное положение двух названных осей.
Аппарат согласно изобретению может содержать диагностический прибор со вторым блоком формирования изображения для получения второго изображения глаза, подлежащего лечебному воздействию. Этот диагностический прибор может быть сконфигурирован с возможностью детектировать, посредством обработки изображения, во втором изображении по меньшей мере одну структуру и генерировать информацию, относящуюся к положению и ориентации каждой из двух указанных структур. Данные, относящиеся к положению и ориентации второй структуры, могут быть получены диагностическим прибором, например на основе топографических измерений передней и/или задней поверхности роговицы посредством кератометра или на основе измерений распределения толщин роговицы посредством ОКТ или камеры Шаймпфлюга.
Компьютерное устройство или даже сам диагностический прибор можно сконфигурировать с возможностью определять, на основе информации о структурах, положение и ориентацию второй структуры относительно первой структуры.
Диагностический прибор и первый блок формирования изображения могут быть размещены на различных медицинских постах (станциях) медицинского учреждения.
С диагностическим прибором может быть связана база данных для хранения в ней информации о структурах и/или выведенной из нее информации с привязкой к идентификационной информации пациента. В этом случае компьютерное устройство может иметь доступ к базе данных с целью определения, на основе информации о структурах, положения и ориентации второй структуры относительно первой структуры. Допустимо также сконфигурировать сам диагностический прибор с возможностью определять, на основе информации о структурах, положение и ориентацию второй структуры относительно первой структуры. В этом случае применима такая конфигурация, в которой диагностический прибор хранит соответствующую информацию о положении и ориентации второй структуры относительно первой структуры в базе данных, к которой имеет доступ компьютерное устройство.
Согласно еще одному предпочтительному варианту компьютерное устройство может быть сконфигурировано с возможностью выводить графическое отображение контура разреза, иллюстрирующее определенные ранее положение и ориентацию контура разреза относительно первой структуры и/или относительно второй структуры, и/или относительно аблируемой зоны роговицы. Графическое отображение позволяет оперирующему хирургу, основываясь на своих представлениях, проверить, до начала операции, приемлемость положения и ориентации контура разреза, предложенных компьютерным устройством, в данном конкретном случае. В частности, компьютерное устройство может быть сконфигурировано с возможностью выводить графическое отображение на монитор и/или вводить его на траекторию наблюдательного пучка операционного микроскопа.
Нельзя исключить, что оперирующий хирург не согласится с предложенными положением и ориентацией контура разреза и захочет модифицировать их. В связи с этим компьютерное устройство может быть сконфигурировано с возможностью модифицировать определенные ранее положение и/или ориентацию контура разреза в соответствии с данными, введенными пользователем, и модифицировать графическое отображение контура разреза в соответствии с его модифицированными положением и/или ориентацией.
Желательно сконфигурировать компьютерное устройство также с возможностью принимать вводимое пользователем подтверждение положения и ориентации контура разреза, генерировать, в зависимости от способа приема указанного подтверждения, управляющие данные для лазерного устройства и осуществлять управление лазерным устройством в соответствии с указанными управляющими данными с целью получения заданного контура внутриглазного разреза.
При определении положения и ориентации первой и/или второй структур каждая из них может быть представлена несколькими (например, двумя или тремя) точками, которые могут рассматриваться также как пиксели или вектора. При этом обе структуры предпочтительно являются неточечными распознаваемыми объектами, которые охватывают линейный сегмент или двумерный участок в изображении, полученном камерой, топографически или иным методом, и, например, имеют предпочтительное измерение. Каждый пиксель такого изображения может, например, задаваться значениями двух или трех координат и/или по меньшей мере одним значением по серой или цветовой шкале.
Информация о структурах, например о первой и второй структурах, в каждом случае может содержать набор данных, описывающих группу (например, из трех) характеристических точек первой и второй структур в произвольно выбранной координатной системе. Точки первой структуры в этом случае могут быть представлены тремя векторами, причем два вектора, связывающие первую и вторую и первую и третью характеристические точки, могут представлять собой два линейно независимых координатных вектора, которые однозначно связаны с координатной системой глаза и могут представлять эту систему. Каждая характеристическая точка второй структуры может быть однозначно задана положением первой характеристической точки первой структуры и линейной комбинацией двух вышеупомянутых координатных векторов в координатной системе, связанной с глазом. Это позволяет задать положения характеристических точек второй структуры в координатной системе глаза, заданной первой структурой. Следовательно, обеспечивается возможность однозначного определения положения, а также ориентации второй структуры относительно первой структуры.
На хирургическом посту достаточно только детектировать в изображении, полученном первым блоком формирования изображения, первую структуру и определить ее положение и ориентацию в заданной координатной системе, связанной с хирургической системой. Полученная ранее информация о положении и ориентации второй структуры относительно первой структуры позволяет компьютерному устройству однозначно определять положение и ориентацию второй структуры в координатной системе хирургической системы без необходимости детектировать саму вторую структуру. Таким образом, полученная информация о структурах позволяет определять положение и ориентацию второй структуры в координатной системе хирургической системы чисто расчетным методом, без формирования на хирургическом посту (например, с помощью камеры или топографического прибора) изображения второй структуры. Это дает выигрыш во времени при проведении хирургической операции, поскольку детектирование второй структуры может осуществляться в рамках предварительного исследования на диагностическом посту, тогда как в ходе операции такого детектирования не требуется.
Желательно, чтобы положение и ориентация (а также, возможно, геометрическая форма и/или размеры) контура разреза были определены компьютерным устройством с учетом определенного положения и ориентации второй структуры в координатной системе хирургической системы так, чтобы рассматриваемое воздействие, реализующее данный контур разреза, успешно обеспечило прямую коррекцию дефекта зрения, обусловленного второй структурой (например, в случае экстракции внутрироговичного лентикула или кератопластики), или способствовало такой коррекции (например, при осуществлении метода LASIK посредством вспомогательного лазера).
Компьютерное устройство может быть сконфигурировано с возможностью определять положение и ориентацию (а также, если это целесообразно, форму и/или размеры) контура разреза таким образом, чтобы в случае формирования лоскута наименьшее расстояние от оси ножки лоскута до центра глаза имело заданное значение, отличное от нуля. Это расстояние (т.е. его заданное значение) может быть адаптировано к геометрической форме зоны, в пределах которой должна производиться абляция роговичной ткани глаза. Центр глаза может быть задан, например, центром зрачка или иной структуры глаза или определен относительно этой структуры, причем он может быть определен компьютерным устройством по первому изображению, полученному первым блоком формирования изображения.
Диагностический прибор может быть снабжен камерой для получения второго изображения, а также прибором для измерения топографии, позволяющим построить топографию роговицы и определить, на основе найденных этим методом топографических данных, положение и ориентацию определенной области роговицы, например ее астигматически деформированной области. Положение и ориентация этой области роговицы (второй структуры) могут быть заданы предпочтительно относительно координатной системы, связанной с глазом, которая была задана первой структурой глаза. Эта первая структура может быть детектирована на основе получаемых камерой изображений с определением ее положения и ориентации.
Графическое отображение контура разреза, воспроизводимое с учетом определенных ранее его положения и ориентации (а также, если это требуется, его формы и размеров), может, например, иллюстрировать внешний контур лоскута (т.е. контур ножки и кромки лоскута). При этом может оказаться желательным, чтобы графическое отображение иллюстрировало не только контур разреза или, по меньшей мере, релевантные части этого контура, но также и вторую структуру. Например, в случае астигматически деформированной области роговицы такая иллюстрация второй структуры может иметь вид линии, соответствующей внешнему контуру астигматической области, и/или быть представлена осью астигматизма. Это обеспечит оперирующему хирургу возможность особенно простой проверки того, является ли контур разреза, определенный компьютерным устройством, приемлемым для данного положения астигматической области роговицы (или, в общем случае, для положения второй структуры). Графическое отображение может быть, например, наложено на изображение глаза. В этом случае изображением может служить одно из изображений, полученных камерой в составе хирургического поста, или изображение, которое оперирующий хирург видит через операционный микроскоп. В первом случае целесообразна визуализация графического отображения на мониторе, а во втором случае графическое отображение может быть введено с помощью соответствующего устройства, например типа проекционного дисплея (head-up display, HUD), на траекторию наблюдательного пучка операционного микроскопа.
Может иметься также устройство ввода, с помощью которого оперирующий хирург или его ассистент может, посредством ручного ввода, модифицировать контур разреза, определенный ранее компьютерным устройством. Желательно, чтобы введенная модификация контура разреза воспроизводилась в его графическом отображении. Другими словами, графическое отображение должно соответственно перестраиваться, как только пользователь модифицирует контур разреза с помощью устройства ввода. Таким образом, положение и ориентация контура разреза, определенные компьютерным устройством, могут соответственно интерпретироваться оперирующим хирургом как предложение, которое он может модифицировать так, как считает нужным. В этом случае активация лазерной системы для выполнения разреза может требовать ввода подтверждения со стороны оперирующего хирурга независимо от того, собирается ли он немедленно принять предложение компьютерного устройства или он предполагает внести соответствующие модификации. Модификации, задаваемые оперирующим хирургом, могут относиться не только к положению и ориентации контура разреза; принимается, что, альтернативно или дополнительно, оперирующий хирург может также индивидуализированным образом модифицировать, через устройство ввода, геометрическую форму и/или размеры контура разреза.
Выше, как пример второй структуры, в контексте изобретения рассматривалась астигматически деформированная область роговицы. Должно быть, однако, понятно, что в качестве второй структуры могут использоваться и другие структуры или части глаза, например катаракта хрусталика, если изобретение должно использоваться при операции катаракты, в которой выполняемый разрез должен включать разрез в хрусталике и/или в капсулярном мешке, например, для получения доступа к хрусталику. Таким образом, изобретение не ограничено только разрезами роговицы и использованием только роговичных структур.
Краткое описание чертежей
Далее изобретение будет рассмотрено со ссылками на прилагаемые чертежи.
На фиг. 1 схематично представлен вариант аппарата в составе хирургической системы.
На фиг. 2а схематично показано изображение, которое сгенерировано блоком формирования изображения в составе аппарата по фиг. 1 и на которое наложено несколько изображений, сгенерированных компьютерным устройством аппарата.
На фиг. 2b схематично показано диагностическое изображение, сгенерированное диагностическим прибором аппарата по фиг. 1.
На фиг. 3 представлена схема, дающая общее представление о варианте способа хирургии глаза.
На фиг. 4 представлено отображение диагностического изображения, сгенерированного диагностическим прибором аппарата по фиг. 1.
На фиг. 5 представлено отображение изображения, которое сгенерировано блоком формирования изображения аппарата по фиг. 1 и на которое спроецировано несколько изображений, сгенерированных компьютерным устройством аппарата.
На фиг. 6 представлено отображение профиля разреза, сгенерированное диагностическим прибором аппарата, представленного на фиг. 1, для получения диагностического изображения.
На фиг. 7 представлено отображение профиля разреза, сгенерированное блоком формирования изображения аппарата по фиг. 1.
На фиг. 8 представлено диагностическое изображение, сгенерированное диагностическим прибором аппарата по фиг. 1.
Осуществление изобретения
На фиг. 1 схематично изображены компоненты офтальмологической хирургической системы (хирургической системы) 10, использующей лазер. Эта система содержит лазер 12, который создает лазерный пучок 14, состоящий из коротких импульсов лазерного излучения с длительностью, соответствующей, например, аттосекундному, фемтосекундному или пикосекундному диапазону. С помощью средств управления и профилирования лазерного пучка (которые будут описаны далее) лазерный пучок 14 направляется на оперируемый человеческий глаз 16. Глаз 16 зафиксирован, с помощью аппликатора 18, относительно связанной с системой 10 координатной системы S' с осями х', у', z'. Аппликатор 18 содержит контактный элемент 20, изображенный, в качестве примера, в виде плоскопараллельной аппланационной пластины, которая прозрачна для лазерного излучения и которую накладывают на глаз 16, так что форма его передней поверхности соответствует поверхности контактного элемента 20. У аппликатора 18 имеется также корпус 21, несущий контактный элемент 20. На фиг. 1 корпус 21 представлен, в качестве примера, в виде расширяющейся кверху конической втулки, которая у своего широкого конца может крепиться к фокусирующему объективу (не изображен).
В фокусирующий объектив (например в f-theta объектив) посредством нескольких зеркал 22, 24, 26 направляют лазерный пучок 14. В представленном примере зеркала 22, 24 способны поворачиваться вокруг взаимно перпендикулярных осей, так что с помощью привода зеркал 22, 24 можно регулировать положение фокуса лазерного пучка 14 в плоскости х'-y' (т.е. в плоскости, поперечной относительно направления пучка при его падении на глаз 16). Для локального управления положением фокуса в продольном направлении (т.е. в z'-направлении) могут иметься, например, неизображенные линза с регулируемым положением вдоль направления распространения лазерного пучка 14, линза с варьируемой преломляющей способностью и/или адаптивное оптическое зеркало, позволяющие изменять расходимость лазерного пучка 14 и, следовательно, положение фокуса пучка по оси z'. В представленном примере зеркало 26 представляет собой неподвижное дихроичное отклоняющее зеркало.
Средством управления хирургической системой 10 является управляемое соответствующей программой компьютерное устройство 28 с памятью 30 данных, с программным модулем 32 сканирования для локального управления во времени положением фокуса лазерного пучка 14 в связанной с системой 10 координатной системе S' и с программным модулем 34 обработки изображений.
За дихроичным зеркалом 26 помещен снабженный соответствующей проекционной оптикой первый блок 36 формирования изображения, представляющий собой, например, цифровую ПЗС-камеру, блок формирования изображения ОКТ-устройства и/или блок формирования изображения на основе камеры Шаймпфлюга с соответствующей оптикой. Блок 36 формирования изображения снабжен источником 38 света, излучающим в зеленой области, т.е. освещающим глаз 16 зеленым светом. Данный блок формирует, без искажения масштаба, двумерное цифровое изображение 39 плоскости х'-y' глаза 16 в координатной системе S' (см. фиг. 2а и 5). Изображение глаза 16, показанное на фиг. 2а и 5, соответствует виду на глаз сверху. Изображение 39 включает в себя по меньшей мере одно изображение по меньшей мере одной первой структуры (или части) глаза 16. В качестве примеров, в составе изображения 39 на фиг. 2а показаны кровеносные сосуды 40', 40а' склеры 41', радужная оболочка 42' со структурными деталями 44а', 44b', лимб 46' со структурной деталью 48' и край 50' зрачка со структурной деталью 52'. В изображении 39 на фиг.5 в качестве примеров показаны радужная оболочка 42' со структурной деталью 44а', лимб 46' и край 50' зрачка с центром 51' зрачка. В нижеследующем описании, в качестве примера, кровеносный сосуд 40' склеры будет рассматриваться как ее первая структурная деталь (далее именуемая структурой).
Блок 36 формирования изображения посылает данные, соответствующие изображению 39, в компьютерное устройство 28. Программный модуль 34 обработки изображений производит обработку этих данных и оценивает их по методу, который будет рассмотрен далее.
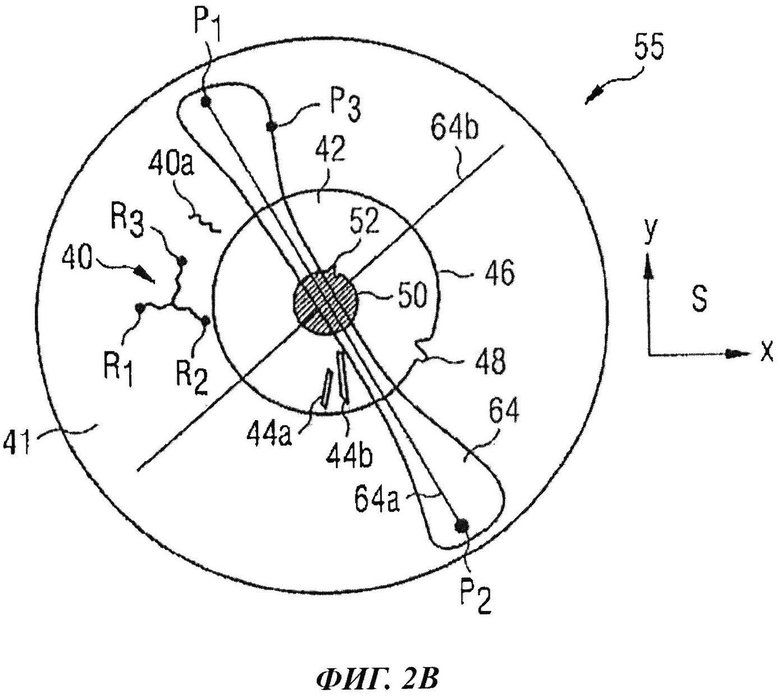
В памяти 30 могут храниться опорные данные, определенные заранее, в процессе диагностики. В качестве примера, на фиг. 1 показан диагностический прибор 54, служащий для определения опорных данных и снабженный вторым блоком 56 формирования изображения. Посредством этого блока в ходе предварительного исследования глаза 16, проводимого до начала лазерного воздействия, может быть получено, без искажения масштаба, в системе S координат х, y, z диагностического прибора, двумерное цифровое диагностическое изображение 55 (см. фиг. 2b, фиг. 4 и фиг. 8) глаза 16, подлежащего воздействию. Как можно понять, например, из фиг. 4 и 6, в процессе предварительного исследования глаз 16 не подвергается внешнему воздействию и не деформируется, так что внутреннее давление глаза 16 находится на естественном уровне. Блок 56 формирования изображения содержит, например, цифровую камеру, а также корнеотопограф (офтальмометр, кератометр или видеокератограф), сконфигурированный для получения топограммы роговицы глаза 16 и для приписывания на ее основе каждому пикселю диагностического изображения 55 значения кривизны, репрезентативно характеризующего кривизну поверхности роговицы в месте роговицы, соответствующем этому пикселю. Данные, полученные камерой и корнеотопографом, совместно образуют диагностическое изображение 55.
Диагностические изображения 55 по фиг. 2b, фиг. 4 и фиг. 8 соответствуют виду на глаз 16 сверху (вдоль оси z). При этом диагностическое изображение 55 по фиг. 2b включает в себя изображения тех же деталей (структур), которые видны в изображении 39 (фиг. 2а). Эти структуры имеют на фиг. 2b те же обозначения, что и на фиг.2а, но без добавления апострофа. Таким образом, диагностическое изображение 55 по фиг. 2b включает спроецированные на него изображения склеры 41, кровеносных сосудов 40, 40а склеры, радужной оболочки 42 со структурными деталями 44а, 44b, лимба 46 со структурной деталью 48, а также края 50 зрачка со структурной деталью 52. С целью улучшенного детектирования внутриглазных структур диагностический прибор 54 использует источник 58 зеленого цвета. Кроме того, этот прибор содержит блок 60 обработки изображений, способный детектировать две заранее выбранные структуры глаза 16, основываясь на данных, полученных от блока 56 формирования изображения. В рассматриваемом примере первой такой структурой является кровеносный сосуд 40 склеры. Второй структурой является область 64 роговицы, искривленная вследствие астигматизма, т.е. характеризуемая двумя астигматическими осями 64а, 64b, которые на фиг. 2b пересекаются в центре зрачка.
Блок 60 обработки изображений сконфигурирован с возможностью детектировать в диагностическом изображении 55 первую структуру 40 по трем характеристическим точкам R1, R2, R3 этой структуры, которые не лежат на одной прямой. В рассматриваемом примере три точки R1, R2, R3 соответствуют концам трех отрезков кровеносного сосуда 40 склеры, отходящих от центральной точки. Положения точек R1, R2, R3 однозначно определяются в координатной системе S диагностического прибора 54 тремя соответствующими векторами R1, R2, R3 (обозначения векторов в данном описании выделены жирным шрифтом).
Таким образом, вектора R1, R2, R3 однозначно определяют положение первой структуры 40 в координатной системе S. При этом ориентация первой структуры 40 в координатной системе S однозначно задается как векторами R1, R2, R3, так и двумя из трех разностных векторов R2-R1, R3-R1, R3-R2. Например, этими двумя векторами будут r12 и r13, где

Размеры и форма первой структуры однозначно характеризуются также точками R1, R2, R3. Поскольку точки R1, R2, R3 не лежат на одной прямой, вектора r12 и r13 являются линейно независимыми и задают в диагностическом изображении 55 внутриглазную координатную систему, привязанную к конкретному глазу 16.
Блок 60 обработки изображений сконфигурирован также с возможностью детектировать в диагностическом изображении 55 вторую структуру 64 по трем ее характеристическим точкам P1, P2, P3, также не лежащим на одной прямой, и определять эти три точки P1, P2, P3 (во внутриглазной координатной системе, заданной векторами r12 и r13) тремя соответствующими векторами P1, P2, P3. Как можно понять из фиг. 2b, точки P1 и P2 лежат в рассматриваемом примере на одной из двух осей 64а, 64b астигматизма. При этом диагностический прибор способен определять положение, ориентацию, размеры и форму второй структуры 64, основываясь на определении коэффициентов a1, а2, а3, b1, b2, b3 в выражениях


Таким образом, точки P1, P2, P3 второй структуры 64 определены в координатной системе, которая задана первой структурой 40 и начало которой находится в точке R1. Коэффициенты a1, a2, а3, b1, b2, b3 являются уникальными для глаза 16 и не зависят от выбора координатной системы S. Коэффициенты a1, а2, а3, b1, b2, b3 могут храниться в качестве опорных данных в базе 62 данных вместе с данными, задающими цифровое изображение соответствующее диагностическому изображению 55, и с информацией, указывающей, что именно является первой структурой 40, к которой привязана вторая структура 64. На фиг. 1 база 62 данных показана интегрированной в диагностический прибор 54, но она может быть сформирована и независимо от любого прибора или быть внешней для любого прибора, являясь, например, онлайновой базой данных или базой данных, записанной на мобильном носителе (дискете, CD, DVD, USB-флешке, карте памяти и т.д.).
С целью осуществления лазерного воздействия на глаз 16, в ходе которого в глазу посредством лазерной технологии, предусматривающей слияние точек фотодеструкции, должен быть сформирован разрез заданного профиля, опорные данные считываются из базы 62 данных и передаются компьютерному устройству 28. На фиг. 1 прочерчена разделительная линия 65 с целью показать, что хирургический пост, где находятся лазер 12, компьютерное устройство 28 и блок 36 формирования изображения, могут быть пространственно отделен от диагностического поста, где находится диагностический прибор 54, и что определение опорных данных происходит до начала осуществления лазерного воздействия на глаз 16.
Программный модуль 34 обработки изображений компьютерного устройства 28, имеющий доступ к базе 62 данных, считывает хранящиеся в ней опорные данные конкретного оперируемого пациента и определяет, на их основе, какая именно первая структура 40' должна быть детектирована. После этого программный модуль 34 обработки изображений определяет, по изображению 39 (см. фиг. 2а), полученному блоком 36 формирования изображения, положения соответствующих характеристических точек R1', R2', R3' первой структуры 40' в координатной системе S', используя для этого коэффициенты c1, c2, c3, d1, d2, d3 согласно выражениям:

Координатная система S' задается векторами х', у', z', причем вектор z' параллелен направлению лазерного пучка 14 и, следовательно, не определяется из двумерного изображения 39. Используя коэффициенты c1, c2, c3, d1, d2, d3, модуль 34 обработки изображений определяет разностные вектора r12', r13' согласно выражениям:

Из этих выражений компьютерное устройство 28 может рассчитать положения точек P1', P2', Р3' относительно точек R1', R2', R3', как

причем в этом расчете используются коэффициенты a1, a2, а3, b1, b2, b3, найденные ранее с помощью диагностического прибора 54 и включенные в опорные данные.
Затем компьютерное устройство 28 может определить положения точек P1', P2', Р3', характеризующих вторую структуру 64', и тем самым положение и ориентацию второй структуры 64' в связанной с хирургической системой 10 координатной системе S', не детектируя вторую структуру 64' непосредственно в данных по изображению, полученных блоком 36 формирования изображения. При этом размеры и форма второй структуры 64' в координатной системе S' могут определяться автоматически, поскольку изображение 39 и диагностическое изображение 55 являются изображениями глаза 16, полученными без искажений масштаба. Как следствие, компьютерное устройство 28 может произвести, с учетом размеров первой структуры 40, 40' в изображении 39 и в диагностическом изображении 55, необходимое зуммирование (подбор масштаба).
Компьютерное устройство 28 может также определить, исходя из положений векторов r12, r13 относительно r12', r13' угол разворота вокруг оси z или z' координатной системы S относительно координатной системы S'. Таким способом компьютерное устройство 28 способно детектировать любые ориентации глаза 16 в плоскости х' - y' (например, обусловленные поворотами глаза 16 вокруг оси z'), которые будут введены в систему 10 при определении положения, ориентации, размеров и формы контура разреза, так что отпадает необходимость в определении этих параметров вручную врачом (хирургом).
На базе положений P1', P2', Р3', ориентации P1' - P2', Р3' - Р2', P'2 - P1' и определенных на их основе размеров и формы второй структуры 64" в координатной системе S' программный модуль 32 сканирования автоматически рассчитывает контур 66' разреза, который предстоит выполнить в глазу 16. В рассматриваемом примере контур 66' разреза задает роговичный лоскут с ножкой 68' лоскута, задаваемой осью Q1'-Q2' этой ножки. В дополнение, контур 66' разреза дополнительно включает вспомогательный разрез 71'.
Вспомогательный разрез образует канал дегазации, через который могут выводиться газы, образующиеся в процессе фотодеструкционного воздействия на глазную ткань. Это позволяет избежать проникновения этих газов в критические зоны глазной ткани. Рекомендуется сначала произвести вспомогательный разрез и только затем осуществить вырезание лоскута.
После того как лоскут будет вырезан, его отгибают в ту сторону, с которой находится его ножка 68', чтобы открыть роговичную ткань (строму). Затем строма в аблируемой зоне 70' подвергается обработке эксимерным лазером (не изображен) в составе хирургической системы 10 в соответствии с ранее определенным профилем абляции, чтобы скорректировать дефект зрения глаза 16 (например астигматизм), вызванный второй структурой 64' (т.е. астигматическим искривлением области роговицы). Положение, ориентация, размеры и форма контура 66' разреза согласованы программным модулем 32 сканирования с положением, ориентацией, размерами и формой второй структуры 64'. Положения точек Q1', Q2' находятся из выражений

Координаты u1, u2, u3, v1, v2, v3 индивидуальны для конкретного воздействия, причем они зависят от дефекта зрения, характеризуемого второй структурой 64'. Так, координаты u1, u2, u3, v1, v2, v3 задаются таким образом, чтобы ось Q1'-Q2' ножки лоскута была ориентирована перпендикулярно оси P1'-P2' астигматизма, а точки Q1' и Q2' находились на равных расстояниях от оси P1'-P2' астигматизма. При этом положения этих точек в поперечных направлениях (т.е. по осям х' и у' в координатной системе S') находятся в зоне радужной оболочки 42' вблизи лимба 46' (см. фиг. 2а).
Положение, ориентация, форма контура и/или размеры вспомогательного разреза 71' зависят от конкретного варианта воздействия и должны быть согласованы с положением и ориентацией ножки 68' лоскута, в частности с положением и ориентацией оси Q1'-Q2' этой ножки. Вспомогательный разрез 71' проходит от роговицы глаза 16 к его склере 41; и через лимб 46'. Вспомогательный разрез 71', который является планарным и имеющим, по существу, вид плоского канала, соединен с контуром 66' основного разреза и заканчивается на поверхности глаза 16, так что этот разрез 71' позволяет газам, образующимся в ходе вырезания лоскута и формирования остальной части контура 66' разреза, выходить за пределы глаза 16.
Компьютерное устройство 28 сконфигурировано с возможностью генерировать визуальное представление контура 66' разреза и второй структуры 64', а также, когда это целесообразно, аблируемой зоны 70' при правильном отображении положения, ориентации, а также размеров и формы в координатной системе S', которая была задана для этих элементов. Хирургическая система 10 может содержать устройство 72, сконфигурированное для наложения этого визуального представления на изображение 39, сформированное блоком 36 формирования изображения, и для воспроизведения результирующего изображения (типа показанного на фиг. 2а) на выходном приборе 74 (например мониторе) с сохранением масштабных соотношений. Результирующее изображение данного типа представлено на фиг. 5. Альтернативно или дополнительно, устройство 72 может вводить указанное визуальное представление в изображение, наблюдаемое через операционный микроскоп хирургической системы 10 (не изображен).
В результате врач (хирург) может наблюдать и отслеживать положение, ориентацию и размеры изображения контура 66' разреза, определенные компьютерным устройством 28, по отношению к первой структуре 40' глаза 16. Контур 66' разреза используется как рекомендация, которая предложена компьютерным устройством 28 и которую можно модифицировать. Если врач (хирург) неудовлетворен этим предложением, он может изменить положение, ориентацию и размеры контура 66' разреза, чтобы еще больше приблизить воздействие к идеальному. С этой целью врач (хирург) может использовать устройство 76 ввода хирургической системы 10, которое позволяет, путем ручного ввода, передать желаемые модификации положения, ориентации, размеров и/или формы контура 66' разреза компьютерному устройству 28. Компьютерное устройство 28 соответственно переопределяет, с учетом этих модификаций, положение, ориентацию, размеры и/или форму контура 66' разреза. Поскольку визуальное представление контура 66' разреза всегда отображает в изображении 39 текущие положение, ориентацию, размеры и форму контура 66' разреза по отношению ко второй структуре 64', описанная оптимизация может осуществляться врачом (хирургом) в режиме онлайн.
Как только врач (хирург) будет удовлетворен положением, ориентацией, размерами и формой контура 66' разреза или, точнее, их визуальным отображением, он может подтвердить пригодность текущего контура 66' разреза путем ручного ввода на устройстве 76. После этого хирургическая система 10 посредством лазера 12 реализует в глазу 16 пациента подтвержденный врачом контур 66' разреза.
На фиг. 3 вышеописанная процедура проиллюстрирована в форме блок-схемы способа по изобретению. Сначала, в процессе предварительного исследования глаза 16 (этап S102), выполняемого до начала лазерного воздействия (этап S100), производится регистрация радужной оболочки (радужки) глаза 16, подлежащего лечебному воздействию (шаг S104). Это соответствует получению диагностического изображения 55 (см. фиг. 2b и фиг. 4). В результате регистрации радужки генерируются данные об изображении (шаг S106), которые отображают индивидуальные части и структуры 40-52 глаза 16. В рамках выделения структур (шаг S108) определяют положение, ориентацию и размеры первой структуры 40 в координатной системе S (с координатами х, y, z) диагностического прибора 54. В дополнение (шаг S110), параллельно определяют диагностические данные, которые включают, в частности, отсчеты с кератометра, распределение толщин роговицы (представленное на фиг. 7), а также положение, ориентацию и размеры (длину) осей 64а, 64b астигматизма (показанных на фиг. 2b) в координатной системе S. Данные, полученные в процессе предварительного исследования, сохраняют в базе данных или на носителе данных (шаг 8112).
По завершении предварительного исследования (этапа S102) осуществляют собственно лазерное воздействие (этап S100). С этой целью на шаге S114 глаз 16, подлежащий лечебному воздействию, фиксируют посредством аппланационной линзы 20 хирургической системы 10 и регистрируют (на шаге S116) изображение 39 глаза 16. В рамках выделения структуры (шаг S118) определяют положение, ориентацию и размеры первой структуры 40' в связанной с системой 10 координатной системе S' с осями х', у', z'. Согласовав определенные описанным способом положение, ориентацию и размеры первой структуры 40' в координатной системе S' с положением, ориентацией и размерами первой структуры 40 в координатной системе S, считанными из памяти или из базы данных, можно найти расчетным путем положение, ориентацию и размеры (длины) осей 64а', 64b' астигматизма в координатной системе S' (шаг S120).
На шаге S122 на основе полученных ранее диагностических данных, в частности отсчетов кератометра, рассчитывают параметры профиля абляции, адаптированные к положению, ориентации и размерам (длинам) осей 64а', 64b' астигматизма в координатной системе S'. Чтобы обеспечить реальную возможность получить этот профиль абляции в глазу 16 в процессе лечебного воздействия, на шагах S124, S128 рассчитывают положение, ориентацию, форму и размеры контура 66' разреза, включая соответствующие положения, ориентации, формы и размеры лоскута, ножки лоскута и вспомогательного разреза 71', и вводят соответствующие параметры в графический пользовательский интерфейс (graphical user interface, GUI). На шаге S126 контур 66' разреза, рассчитанный, как это описано выше, вместе с изображением, зарегистрированным на шаге S116, отображают на GUI и/или вводят, с помощью соответствующего устройства, например типа HUD, на траекторию наблюдательного пучка операционного микроскопа (см. также фиг. 2b и фиг. 5).
Положение, ориентация, форма и размеры контура 66' разреза могут быть модифицированы оперирующим хирургом посредством процесса S130. В ходе этого процесса, на шаге S132, оперирующий хирург изменяет предложенные хирургической системой параметры путем ручной настройки через GUI. После этого контур 66' разреза переопределяется в соответствии с введенными изменениями и повторно отображается на GUI или HUD. Как только оперирующий хирург будет удовлетворен положением, ориентацией, формой и размерами контура 66' разреза, он подтверждает, на шаге S134, установленные параметры. После этого посредством хирургической системы 10 осуществляется воздействие на глаз 16 в соответствии с установленными параметрами (шаг S136). В качестве альтернативы, вторая структура может представлять собой область патологической ткани глаза 16 пациента, приводящую к ослаблению его остроты зрения, например область катаракты, т.е. область, подверженную заболеванию, именуемому корковой, или серой катарактой. В этом случае положение, ориентация, размеры и форма контура 66' разреза должны определяться относительно области катаракты, т.е. должны быть привязаны к хрусталику глаза 16.
Диагностический прибор 54 содержит, например, цифровую камеру, а также корнеотопограф (офтальмометр, кератометр или видеокератограф), сконфигурированный для получения топограммы роговицы глаза 16 и/или распределения толщин роговицы глаза для того, чтобы на основе этих данных приписать каждому пикселю диагностического изображения 55 значение кривизны, репрезентативно характеризующее кривизну поверхности роговицы в месте роговицы, соответствующем этому пикселю.
При этом диагностический прибор 54 может быть сконфигурирован с возможностью определять, в рамках пахиметрического исследования глаза 16, распределение толщин роговицы (см. фиг. 8). В этом случае с каждым пикселем диагностического изображения 55 ассоциируется значение толщины, репрезентативно характеризующее кривизну поверхности роговицы в месте роговицы, соответствующем этому пикселю. При таком представлении можно детектировать край 50 зрачка, центр 51 зрачка и вершину 53 роговицы. Другими словами, распределение толщин роговицы, построенное по результатам измерений значений толщины, дает индивидуализированную характеристику глаза. Поэтому данное распределение может служить в качестве первой структуры. В этом случае распределение толщин роговицы задает внутриглазную координатную систему, к которой будут привязаны положение, ориентация и размеры второй структуры, например астигматически деформированной области роговицы или осей астигматизма. С этой целью в качестве начала координат (х [мм]=0, y [мм]=0) может быть выбрана, например, вершина 53 роговицы.
Распределение толщин роговицы находят, например, по результатам измерений методом ОКТ или по принципу Шаймпфлюга. В случае ОКТ-измерений получают множество двумерных профилей разреза глаза 16, на базе которых могут быть построены двумерные и/или трехмерные изображения глаза 16. Например, для этой цели используют профили разреза, взаимно параллельные или пересекающиеся на оси глаза (например на зрительной оси). Профиль разреза этого типа можно видеть на фиг. 6. Диагностический прибор 54 в каждом случае определяет по подобным профилям разреза значения толщины роговицы в пределах сечения роговицы, соответствующего определенному профилю разреза. В качестве примеров, на фиг. 6 отмечены значения D1, D2, D3 толщины роговицы. Совокупность значений толщины позволяет построить распределение толщин роговицы, показанное на фиг. 8. Точки с одинаковой толщиной связаны контурными линиями. Для лучшей различимости контурных линий можно применить их цветное кодирование. Из ОКТ-изображения можно также извлечь информацию о распределении характеристических слоев.
Как и диагностический прибор 54, хирургическая система 10 может быть сконфигурирована с возможностью, в рамках пахиметрической регистрации глаза 16, получать распределения толщин его роговицы. На фиг.7 представлена полученная ОКТ-методом запись, которая отображает профиль разреза роговицы в ходе лечебного воздействия и из которой извлекаются значения толщины для построения распределения толщин роговицы, приведенной в данном примере в уплощенное состояние с помощью аппланационной пластины 20. В качестве примеров, на фиг. 7 показаны три значения D1', D2', D3' толщины роговицы, соответствующие ее значениям D1, D2, D3, показанным на фиг. 6.
Поскольку распределение толщин роговицы остается неизменным как в уплощенном, так и в свободном состояниях, значения для астигматически деформированной области роговицы или осей астигматизма, определенные в процессе предварительного исследования с помощью диагностического прибора 54, остаются пригодными и в процессе осуществления реального лечебного воздействия.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВОЗДЕЙСТВИЯ НА ГЛАЗ ЛАЗЕРНЫМ ИЗЛУЧЕНИЕМ | 2009 |
|
RU2498789C2 |
| СПОСОБ КОРРЕКЦИИ АММЕТРОПИЙ МЕТОДОМ LASIK FREE-FLAP (ПОЛНЫЙ СРЕЗ ПОВЕРХНОСТИ ЛОСКУТА) | 2001 |
|
RU2223082C2 |
| УСТРОЙСТВО ДЛЯ ОФТАЛЬМОЛОГИЧЕСКОЙ ЛАЗЕРНОЙ ХИРУРГИИ | 2009 |
|
RU2526975C2 |
| ЭЛЕКТРОННЫЕ МАРКИРОВКА/СОВМЕЩЕНИЕ ГЛАЗА | 2013 |
|
RU2637287C2 |
| СПОСОБ ЛЕЧЕНИЯ НАЧАЛЬНЫХ СТАДИЙ КЕРАТОКОНУСА ПУТЕМ ЭКСИМЕРЛАЗЕРНОЙ ХИРУРГИИ | 2006 |
|
RU2309713C1 |
| СПОСОБ ХИРУРГИЧЕСКОГО ЛЕЧЕНИЯ ГИПЕРМЕТРОПИЧЕСКОЙ АНИЗОМЕТРОПИИ У ДЕТЕЙ | 2008 |
|
RU2369369C1 |
| СПОСОБ ЛАЗЕРНОЙ КОРРЕКЦИИ АБЕРРАЦИЙ ПОСЛЕ ФАКОЭМУЛЬСИФИКАЦИИ | 2007 |
|
RU2331400C1 |
| УСТРОЙСТВО И СПОСОБ ОБРАБОТКИ МАТЕРИАЛА ПРИ ПОМОЩИ СФОКУСИРОВАННОГО ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ | 2010 |
|
RU2551921C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБЪЕДИНЕНИЯ ХИРУРГИЧЕСКОГО ЛЕЧЕНИЯ КАТАРАКТЫ С ХИРУРГИЧЕСКИМ ЛЕЧЕНИЕМ ГЛАУКОМЫ ИЛИ АСТИГМАТИЗМА | 2011 |
|
RU2580749C2 |
| СПОСОБ ЛЕЧЕНИЯ СЛОЖНОГО МИОПИЧЕСКОГО АСТИГМАТИЗМА | 2007 |
|
RU2336062C1 |







Группа изобретений относится к области медицины. Аппарат для офтальмологической хирургической системы с использованием лазера применяется для выполнения способа и содержит: первый блок формирования изображения, сконфигурированный для формирования первого изображения глаза, подлежащего лечебному воздействию, и компьютерное устройство, сконфигурированное с возможностью детектировать, посредством обработки первого изображения, по меньшей мере одну первую структуру глаза, определять положение и ориентацию первой структуры в координатной системе, связанной с указанной хирургической системой, определять положение и ориентацию по меньшей мере одной второй структуры глаза, которая включает в себя астигматически искривленную область роговицы глаза, относительно первой структуры, определять положение и ориентацию, в указанной координатной системе, контура разреза, который задает роговичный лоскут с ножкой лоскута, подлежащего выполнению на глазу, с учетом определенных указанным образом положения и ориентации первой структуры в указанной координатной системе и положения и ориентации по меньшей мере одной второй структуры глаза относительно первой структуры с использованием заданного условия, определяющего взаимное положение лоскута и астигматически искривленной области роговицы. Применение данной группы изобретений позволит сократить продолжительность процесса установки на глаз аппликатора лазерной системы. 2 н. и 28 з.п. ф-лы, 8 ил.
1. Аппарат для офтальмологической хирургической системы (10) с использованием лазера, содержащий:
- первый блок (36) формирования изображения, сконфигурированный для формирования первого изображения (39) глаза (16), подлежащего лечебному воздействию, и
- компьютерное устройство (28), сконфигурированное с возможностью
детектировать, посредством обработки первого изображения, по меньшей мере одну первую структуру (40, 40′) глаза (16),
определять положение и ориентацию первой структуры в координатной системе (S′), связанной с указанной хирургической системой (10),
определять положение и ориентацию по меньшей мере одной второй структуры (64, 64′) глаза (16), которая включает в себя астигматически искривленную область роговицы глаза, относительно первой структуры (40, 40′),
определять положение и ориентацию, в указанной координатной системе (S′), контура (66′) разреза, который задает роговичный лоскут с ножкой (68′) лоскута, подлежащего выполнению на глазу, с учетом определенных указанным образом положения и ориентации первой структуры в указанной координатной системе и положения и ориентации по меньшей мере одной второй структуры (64, 64′) глаза (16) относительно первой структуры (40, 40′) с использованием заданного условия, определяющего взаимное положение лоскута и астигматически искривленной области роговицы.
2. Аппарат по п. 1, выполненный с возможностью ассоциировать с ножкой (68′) лоскута ее ось (Q1′-Q2′), а с астигматически искривленной областью роговицы ось (Р1′-Р2′) астигматизма, при этом компьютерное устройство (28) сконфигурировано с возможностью определять положение и ориентацию контура (66′) разреза с использованием заданного условия, определяющего взаимное положение оси ножки лоскута и оси астигматизма.
3. Аппарат по п. 2, в котором заданное условие, определяющее взаимное положение оси (Q1′-Q2′) ножки лоскута и оси (P1′-P2′) астигматизма, задает, по существу, взаимно перпендикулярное положение указанных осей.
4. Аппарат по п. 1, в котором по меньшей мере одна первая структура (40, 40′) ассоциирована с радужной оболочкой, зрачком, лимбом, конфигурацией кровеносных сосудов склеры и/или с распределением толщин роговицы глаза (16).
5. Аппарат по п. 1, дополнительно содержащий диагностический прибор (54) со вторым блоком (56) формирования изображения для получения второго изображения (55) глаза (16), подлежащего лечебному воздействию, при этом диагностический прибор (54) сконфигурирован с возможностью детектировать, посредством обработки изображения, во втором изображении по меньшей мере одну первую структуру (40, 40′) и генерировать информацию, относящуюся к положению и ориентации каждой из двух указанных структур.
6. Аппарат по п. 5, в котором компьютерное устройство (28) выполнено с возможностью определять, на основе информации о структурах, положение и ориентацию второй структуры (64, 64′) относительно первой структуры (40, 40′).
7. Аппарат по п. 5, в котором диагностический прибор (54) и первый блок (36) формирования изображения размещены на различных медицинских постах медицинского учреждения.
8. Аппарат по п. 5, в котором с диагностическим прибором (54) связана база (62) данных для хранения в ней информации о структурах и/или выведенной из нее информации с привязкой к идентификационной информации пациента, а компьютерное устройство (28) имеет доступ к базе данных.
9. Аппарат по п. 1, в котором компьютерное устройство (28) выполнено с возможностью выводить графическое отображение контура (66′) разреза, иллюстрирующее определенные ранее положение и ориентацию контура разреза относительно первой структуры (40, 40′) и/или относительно второй структуры (64, 64′), и/или относительно аблируемой зоны (70′) роговицы.
10. Аппарат по п. 9, в котором компьютерное устройство (28) выполнено с возможностью выводить графическое отображение на монитор и/или вводить его на траекторию наблюдательного пучка операционного микроскопа.
11. Аппарат по п. 9, в котором компьютерное устройство (28) выполнено с возможностью модифицировать определенные ранее положение и/или ориентацию контура (66′) разреза в соответствии с данными, введенными пользователем, и модифицировать графическое отображение контура разреза в соответствии с его модифицированными положением и/или ориентацией.
12. Аппарат по п. 1, в котором компьютерное устройство (28) выполнено с возможностью принимать вводимое пользователем подтверждение положения и ориентации контура (66′) разреза, генерировать, в зависимости от способа приема указанного подтверждения, управляющие данные для лазерного устройства (12) и осуществлять управление лазерным устройством в соответствии с указанными управляющими данными с целью получения заданного контура внутриглазного разреза.
13. Аппарат по любому из пп. 2-12, выполненный с возможностью формировать контур разреза, дополнительно задающий вспомогательный канал, проходящий от поверхности разреза, образующего лоскут, в направлении от лоскута, при этом компьютерное устройство (28) сконфигурировано с возможностью вырабатывать, с учетом определенных ранее положения и ориентации по меньшей мере тех частей контура разреза, которые задают лоскут, управляющие данные для формирования вспомогательного канала таким образом, чтобы он проходил по меньшей мере в область лимба глаза.
14. Аппарат по п. 13, в котором компьютерное устройство (28) сконфигурировано с возможностью генерировать управляющие данные для формирования вспомогательного канала таким образом, чтобы он проходил за пределы лимба глаза.
15. Способ проведения хирургической операции на глазу, включающий:
- получение первого изображения глаза, подлежащего лечебному воздействию,
- анализ первого изображения с целью детектирования по меньшей мере одной первой структуры глаза,
- определение положения и ориентации первой структуры в координатной системе, связанной с офтальмологической хирургической системой с использованием лазера,
- определение положения и ориентации по меньшей мере одной второй структуры глаза, которая включает в себя астигматически искривленную область роговицы глаза, относительно первой структуры,
- определение в координатной системе, связанной с офтальмологической хирургической системой, положения и ориентации контура разреза, который задает роговичный лоскут с ножкой лоскута, подлежащего выполнению на глазу, с учетом определенного положения и ориентации первой структуры в указанной координатной системе и с учетом определенного положения и ориентации по меньшей мере одной второй структуры глаза относительно первой структуры с использованием заданного условия, определяющего взаимное положение лоскута и астигматически искривленной области роговицы.
16. Способ по п. 15, в котором с ножкой лоскута ассоциируют ее ось, а с астигматически искривленной областью роговицы - ось астигматизма, при этом способ включает: определение положения и ориентации контура разреза с использованием заданного условия, определяющего взаимное положение оси ножки лоскута и оси астигматизма.
17. Способ по п. 16, в котором заданное условие, определяющее взаимное положение оси ножки лоскута и оси астигматизма, задает, по существу, взаимно перпендикулярное положение двух осей.
18. Способ по п. 15, в котором по меньшей мере одну первую структуру ассоциируют с радужной оболочкой, зрачком, лимбом, конфигурацией кровеносных сосудов склеры и/или с распределением толщин роговицы глаза.
19. Способ по п. 15, включающий: получение второго изображения глаза, подлежащего лечебному воздействию, детектирование, посредством обработки изображения, во втором изображении по меньшей мере одной первой структуры и определение информации, относящейся к положению и ориентации каждой из двух структур.
20. Способ по п. 19, включающий: определение, на основе информации о структурах, положения и ориентации второй структуры относительно первой структуры.
21. Способ по п. 19, включающий получение первого и второго изображений посредством различных камер.
22. Способ по п. 21, в котором указанные камеры используют на различных медицинских постах медицинского учреждения.
23. Способ по п. 19, включающий хранение информации о структурах и/или выведенной из нее информации в базе данных с привязкой ее к идентификационной информации пациента.
24. Способ по п. 15, включающий генерирование графического отображения контура разреза, иллюстрирующего определенные ранее положение и ориентацию контура разреза относительно первой структуры и/или относительно второй структуры, и/или относительно аблируемой зоны роговицы.
25. Способ по п. 22, включающий по меньшей мере одну из следующих операций:
- выведение графического отображения на монитор и
- введение графического отображения на траекторию наблюдательного пучка операционного микроскопа.
26. Способ по п. 24, включающий модифицирование определенных ранее положения и/или ориентации контура разреза в соответствии с данными, введенными пользователем, и модифицирование графического отображения контура разреза в соответствии с его модифицированными положением и/или ориентацией.
27. Способ по п. 15, включающий: прием вводимого пользователем подтверждения положения и ориентации контура разреза, генерирование, в зависимости от способа приема указанного подтверждения, управляющих данных для лазерного устройства и осуществление управления лазерным устройством в соответствии с указанными управляющими данными с целью получения заданного контура внутриглазного разреза.
28. Способ по любому из пп. 15-27, в котором контур разреза дополнительно задает вспомогательный канал, проходящий от поверхности разреза, образующего лоскут, в направлении от лоскута, при этом способ включает генерирование, с учетом определенных ранее положения и ориентации по меньшей мере тех частей контура разреза, которые задают лоскут, управляющих данных, обеспечивающих, при формировании вспомогательного канала, его выход по меньшей мере в область лимба глаза.
30. Способ по п. 28, включающий генерирование управляющих данных, обеспечивающих, при формировании вспомогательного канала, его выход по меньшей мере за пределы лимба глаза.
| US 20100256614 A1, 07.10.2010 | |||
| ОФТАЛЬМОХИРУРГИЧЕСКАЯ ЭКСИМЕРНАЯ ЛАЗЕРНАЯ СИСТЕМА | 2005 |
|
RU2301650C1 |
| WO 2006060323 A1, 08.06.2006 | |||
| US 20080051772 A1, 28.02.2008. | |||

