Уровень техники
Область техники, к которой относится изобретение
Настоящее изобретение относится к устройствам захвата изображения и способам управления ими, и, в частности, относится к способам коррекции влияния оптических свойств блока объектива на изображение.
Настоящее изобретение также относится к блокам объектива, которые облегчают коррекцию влияния, которое оптические свойства блока объектива оказывают на изображение, в устройствах захвата изображения.
Описание предшествующего уровня техники
Имеется постоянный спрос на устройства захвата изображения, такие как цифровые камеры, для вывода изображений с высоким качеством изображения, и оптические свойства блоков объектива, используемых для формирования сюжетного изображения, являются одной из причин ухудшения качества изображения. Потемнение на краях, искажение, хроматическая аберрация увеличения и так далее могут быть приведены в качестве примеров оптических свойств, которые вызывают ухудшение изображения, но является трудным реализовать блок объектива, который полностью устраняет такие свойства.
Соответственно, известны технические приемы, которые корректируют ухудшение изображения, вызванное оптическими свойствами, посредством применения обработки изображений к захваченным изображениям (то есть способы оптической коррекции).
Между тем, оптические свойства варьируются также в одном блоке объектива в зависимости от фокусного расстояния (угла обзора объектива с переменным фокусным расстоянием), съемочного расстояния (расстояния фокусирования), значений оптических параметров, таких как значение апертуры, и так далее. Таким образом, при использовании обработки изображений, чтобы корректировать ухудшение изображения, вызванное оптическими свойствами, является необходимым использовать значения оптической коррекции, которые соответствуют оптическим параметрам, установленным во время съемки, чтобы достигать точной коррекции.
Выложенный патент Японии, номер 2005-286482, предлагает способ определения величины оптической коррекции на основе полиномиальной аппроксимации, формируемой из перехода в величине коррекции искажений, которая основывается на положении фокусного расстояния (фокусном расстоянии) объектива с переменным фокусным расстоянием.
При использовании устройства захвата изображения с объективом с фиксированным фокусным расстоянием значения оптической коррекции могут быть найдены заранее для всех наборов значений оптических параметров. Является возможной конфигурация, которая сохраняет только дискретные наборы, которые фактически требуются, на основе емкости памяти или подобного, и посредством интерполяции находит наборы, которые не сохраняются, и такая конфигурация делает сравнительно легким обеспечение точности коррекции.
С другой стороны, в случае устройства захвата изображения со сменным объективом может присоединяться большое количество типов блоков объектива, включая специальные объективы, такие как макросъемочные объективы, объективы со сдвигом и так далее.
Как упомянуто выше, оптические свойства одиночного сменного объектива отличаются для каждого набора из множества оптических параметров. В обычном объективе является возможным однозначно находить значения оптической коррекции на основе наборов из фокусного расстояния, съемочного расстояния и значения апертуры, но вследствие возросшего многообразия блоков объектива является иногда необходимым применять другие оптические параметры, чтобы идентифицировать значения оптической коррекции. Это будет описываться ниже.
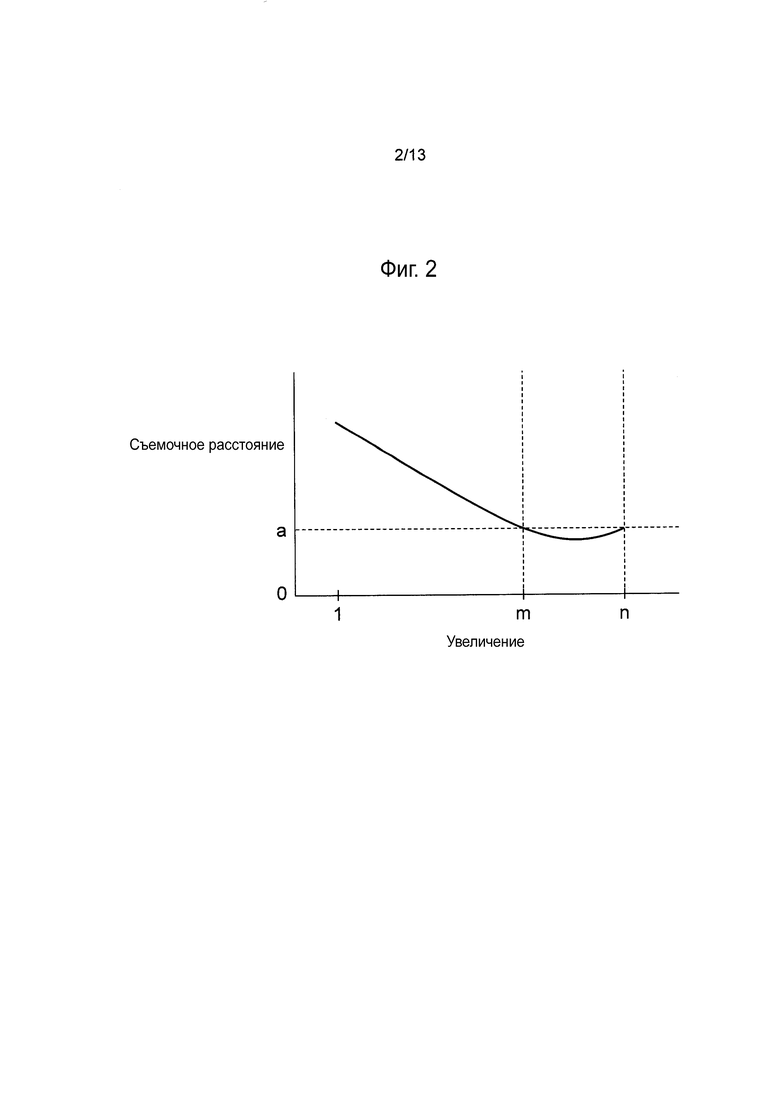
Фиг. 2 является диаграммой, иллюстрирующей пример взаимосвязи между степенью увеличения и съемочным расстоянием в макросъемочном объективе с одиночным фокусом с возможностью съемки от увеличения в натуральную величину до увеличения в n раз. Хотя съемочное расстояние является одним и тем же значением при увеличении, равном m, и увеличении, равном n, в этом примере оптические свойства изменяются как результат изменения увеличения, и, таким образом, значение оптической коррекции является другим, когда увеличение равняется m и когда увеличение равняется n.
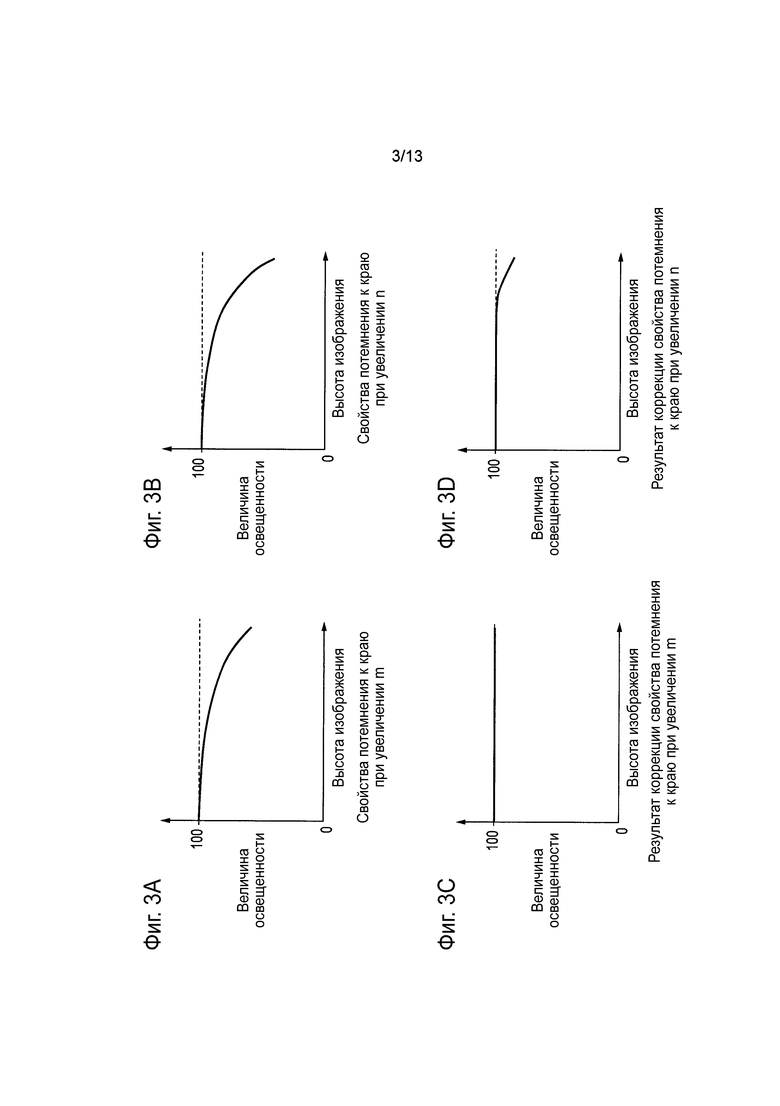
Фиг. 3A-3D являются диаграммами, иллюстрирующими примеры свойств потемнения к краю макросъемочного объектива, имеющего свойства, показанные на фиг. 2, и результаты коррекции потемнения к краю с использованием значений оптической коррекции, найденных на основе съемочного расстояния, проиллюстрированного на фиг. 2. Конкретно то, как яркость (величина освещенности) изображения, полученного посредством съемки сюжета, имеющего равномерные изменения светимости в зависимости от высоты изображения, которая соответствует расстоянию от центра изображения, иллюстрируется при принятии яркости центра изображения в качестве значения 100.
Фиг. 3A и 3B иллюстрируют свойства потемнения к краю макросъемочного объектива, когда увеличение равняется m и когда увеличение равняется n соответственно. Хотя оба случая демонстрируют уменьшение в величине освещенности по мере того, как высота изображения увеличивается (то есть по мере того, как изображение идет от центра в направлении к периферии), свойства являются разными. Соответственно, для по меньшей мере одного из увеличения, равного m, и увеличения, равного n, значение оптической коррекции для потемнения к краю, которое должно использоваться, не может идентифицироваться из наборов фокусного расстояния, съемочного расстояния и значения апертуры.
Фиг. 3C и 3D иллюстрируют примеры результатов коррекции с использованием значений оптической коррекции, идентифицированных без принятия в рассмотрение увеличения. В этом примере потемнение к краю должным образом корректируется в случае, когда увеличение равняется m, но коррекция является недостаточной в случае, когда увеличение равняется n, ведя к неправильной коррекции, которая выполняется. Таким образом, в зависимости от блока объектива имеются случаи, где должное значение оптической коррекции не может определяться с использованием только информации фокусного расстояния, съемочного расстояния и значения апертуры.
Чтобы выполнять должную оптическую коррекцию изображения, снятого с использованием, например, макросъемочного объектива, имеющего свойства, проиллюстрированные на фиг. 2, является необходимой информация для идентификации увеличения. Например, увеличение может механически устанавливаться посредством управления кольцом изменения фокусного расстояния вручную для изменения увеличения, предоставленного на блоке объектива, и должное значение оптической коррекции может идентифицироваться, если увеличение, которое было установлено, является известным.
Соответственно, чтобы применять должную оптическую коррекцию к изображениям, которые могут сниматься посредством многообразия типов (моделей) блоков объективов в устройстве захвата изображения со сменным объективом, является необходимым получать значения оптических параметров, требуемые, чтобы идентифицировать значения оптической коррекции для каждой модели блока объектива.
Однако стандартный способ, раскрытый в выложенном патенте Японии № 2005-286482, не рассматривает случаи, когда типы оптических параметров, требуемых, чтобы идентифицировать значения оптической коррекции, отличаются от модели блока объектива к модели блока объектива и, таким образом, не обеспечивают решение вышеупомянутой проблемы.
Существо изобретения
Имея достижения в свете таких проблем с использованием стандартных способов, одним аспектом настоящего изобретения является предоставить устройство захвата изображения, выполненное с возможностью должной оптической коррекции даже в случае, когда оптические параметры, требуемые для идентификации значений оптической коррекции, отличаются от модели блока объектива к модели блока объектива.
Согласно одному аспекту настоящего изобретения, предоставляется устройство захвата изображения с присоединяемым к нему и отсоединяемым от него блоком объектива, выполненное с возможностью оптической коррекции для коррекции влияния, обусловленного оптическими свойствами блока объектива, используемого при съемке, на снятое изображение посредством применения обработки изображений с использованием значения оптической коррекции, при этом устройство содержит: средство получения для получения от присоединенного блока объектива оптических параметров относительно оптических свойств, присутствующих в течение съемки, при этом средство получения выполнено с возможностью получать первые оптические параметры в случае, когда присоединенный блок объектива является первым блоком объектива, и получать вторые оптические параметры, включающие в себя параметры, отличные от первых оптических параметров, в случае, когда присоединенный блок объектива является вторым блоком объектива; и средство коррекции для коррекции снятого изображения на основе оптических свойств присоединенного блока объектива посредством применения обработки изображений с использованием значения оптической коррекции к снятому изображению, при этом средство коррекции выполнено с возможностью использовать значение оптической коррекции на основе первых оптических параметров в случае, когда присоединенный блок объектива является первым блоком объектива, и использовать значение оптической коррекции на основе вторых оптических параметров в случае, когда присоединенный блок объектива является вторым блоком объектива.
Согласно другому аспекту настоящего изобретения, предоставляется блок объектива, выполненный с возможностью присоединения к и отсоединения от устройства захвата изображения, содержащий: средство связи для связи с устройством захвата изображения, к которому блок объектива присоединен; память, в которой хранится значение оптической коррекции для коррекции, посредством обработки изображений, ухудшения изображения, вызванного оптическими свойствами блока объектива; средство уведомления для уведомления устройства захвата изображения, к которому блок объектива присоединен, что присутствуют первые оптические параметры и вторые оптические параметры, которые являются отличными от первых оптических параметров и которые соответствуют значению оптической коррекции; и средство управления для передачи значения оптической коррекции, первых оптических параметров и вторых оптических параметров на устройство захвата изображения, к которому блок объектива присоединен, посредством средства связи.
Согласно дополнительному аспекту настоящего изобретения, предоставляется способ управления для устройства захвата изображения с присоединяемым к нему и отсоединяемым от него блоком объектива, выполненным с возможностью оптической коррекции для коррекции влияния, обусловленного оптическими свойствами блока объектива, используемого при съемке, на снятое изображение посредством применения обработки изображений с использованием значения оптической коррекции, при этом способ содержит: этап, на котором получают от присоединенного блока объектива оптические параметры, касающиеся оптических свойств, присутствующих в течение съемки, включающий в себя этап, на котором получают первые оптические параметры в случае, когда присоединенный блок объектива является первым блоком объектива, и этап, на котором получают вторые оптические параметры, включающие в себя параметры, отличные от первых оптических параметров, в случае, когда присоединенный блок объектива является вторым блоком объектива; и этап, на котором корректируют снятое изображение на основе оптических свойств присоединенного блока объектива посредством применения обработки изображений с использованием значения оптической коррекции к снятому изображению, при этом на этапе коррекции используют значение оптической коррекции на основе первых оптических параметров в случае, когда присоединенный блок объектива является первым блоком объектива, и используют значение оптической коррекции на основе вторых оптических параметров в случае, когда присоединенный блок объектива является вторым блоком объектива.
Согласно другому аспекту настоящего изобретения, предоставляется носитель данных, хранящий программу, которая, при исполнении устройством захвата изображения, предписывает устройству захвата изображения выполнять способ согласно настоящему изобретению.
Дополнительные признаки настоящего изобретения станут видны из последующего описания иллюстративных вариантов осуществления (со ссылкой на прилагаемые чертежи).
Краткое описание чертежей
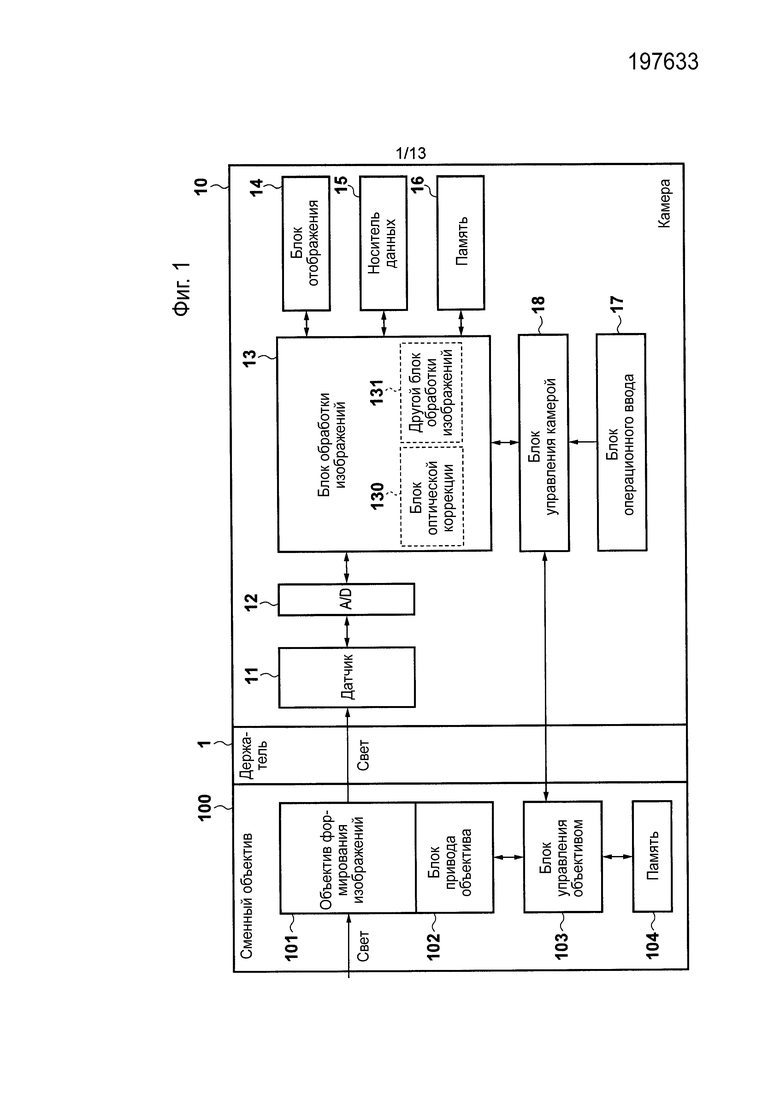
Фиг. 1 является блок-схемой, иллюстрирующей пример функциональной конфигурации системы цифровой камеры со сменным типом объективов, служащей в качестве примера устройства захвата изображения согласно первому варианту осуществления настоящего изобретения.
Фиг. 2 является диаграммой, иллюстрирующей пример взаимосвязи между увеличением и съемочным расстоянием в макросъемочном объективе с одиночным фокусом.
Фиг. 3A-3D являются диаграммами, иллюстрирующими примеры свойств потемнения к краю макросъемочного объектива, имеющего свойства, показанные на фиг. 2, и результаты коррекции потемнения к краю с использованием значений оптической коррекции, найденных на основе съемочного расстояния, проиллюстрированного на фиг. 2.
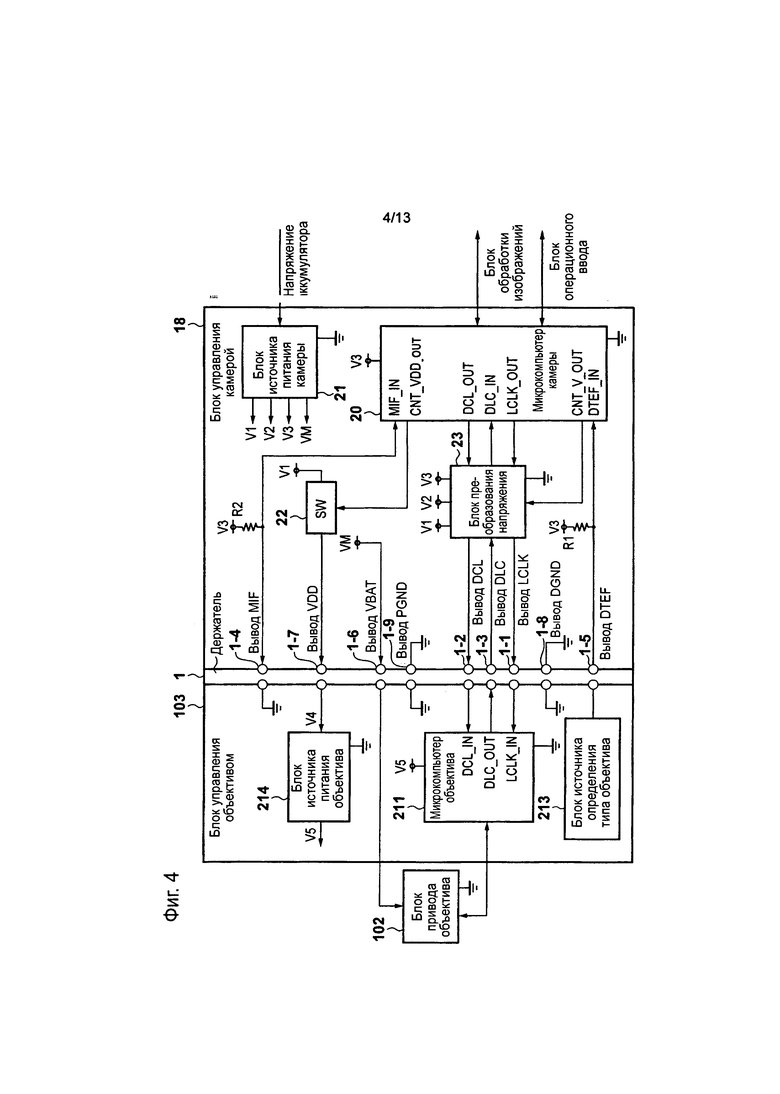
Фиг. 4 является блок-схемой, иллюстрирующей пример конфигурации для связи между блоком управления камерой и блоком управления объективом, показанными на фиг. 1.
Фиг. 5A и 5B являются диаграммами, иллюстрирующими примеры конфигурации блока источника определения типа объектива, предоставленного в блоке управления объективом, показанном на фиг. 4.
Фиг. 6 является блок-схемой последовательности операций, иллюстрирующей обработку для определения типа сменного объектива и обработку приема оптических параметров, выполняемых посредством блока управления камерой, согласно первому варианту осуществления настоящего изобретения.
Фиг. 7 является блок-схемой последовательности операций, иллюстрирующей обработку оптической коррекции согласно первому варианту осуществления настоящего изобретения.
Фиг. 8 является диаграммой, иллюстрирующей пример структуры данных оптической коррекции, сохраненных в памяти 16, показанной на фиг. 1.
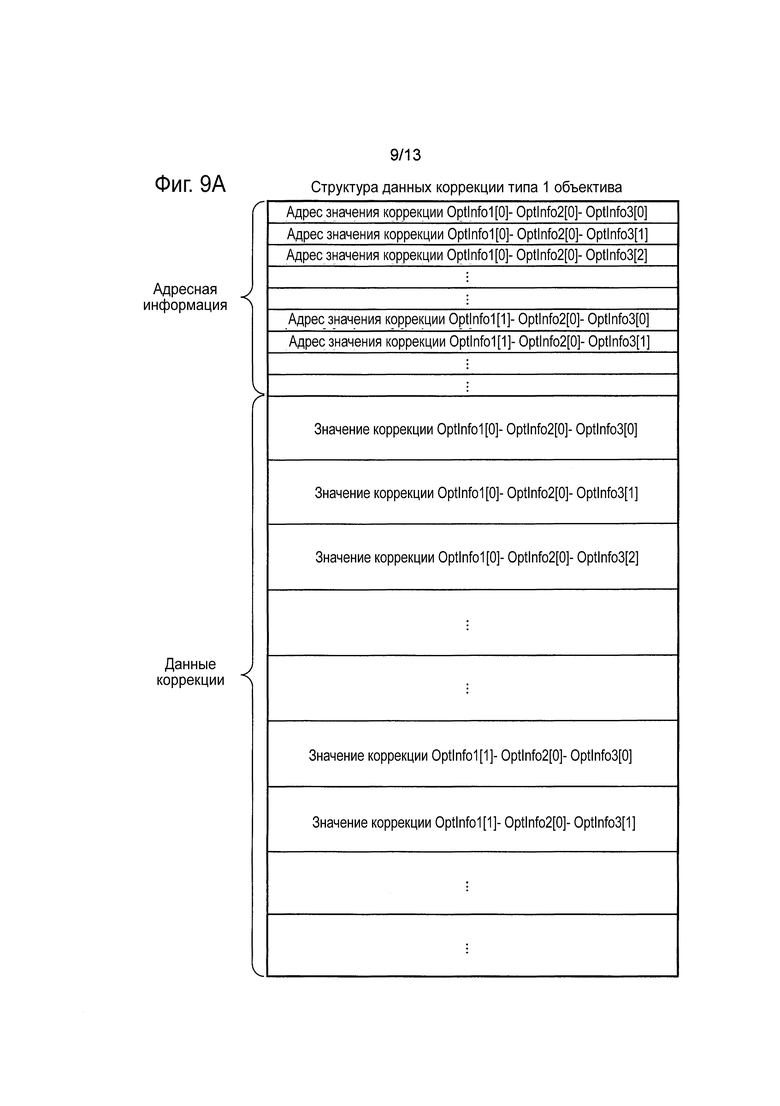
Фиг. 9A является диаграммой, иллюстрирующей пример структуры данных оптической коррекции, сохраненных в памяти 16, показанной на фиг. 1.
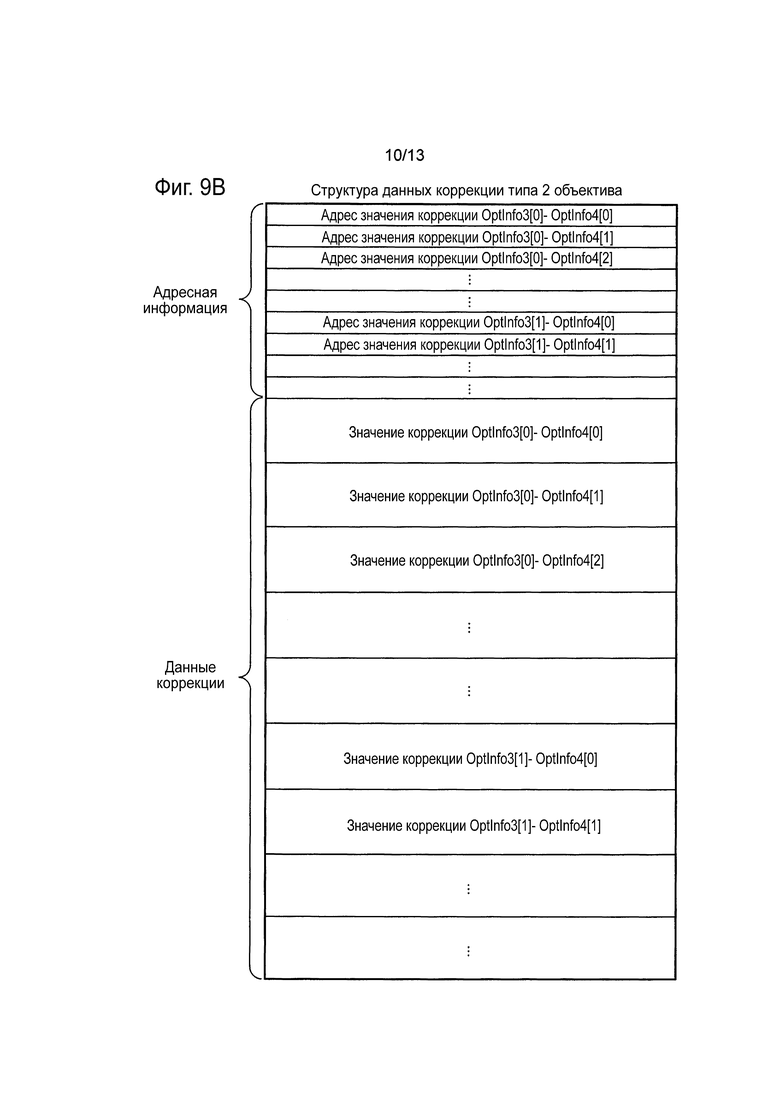
Фиг. 9B является диаграммой, иллюстрирующей пример структуры данных оптической коррекции, сохраненных в памяти 16, показанной на фиг. 1.
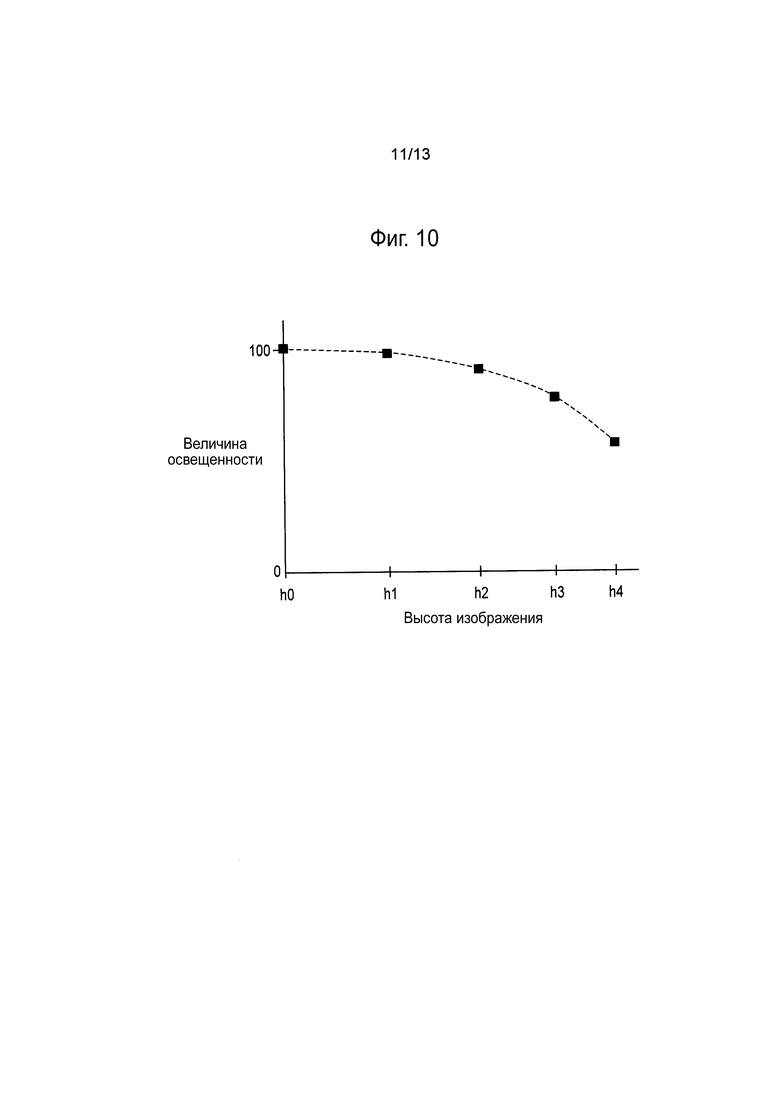
Фиг. 10 является диаграммой, иллюстрирующей пример значений оптической коррекции, хранимых для каждого из наборов оптических параметров.
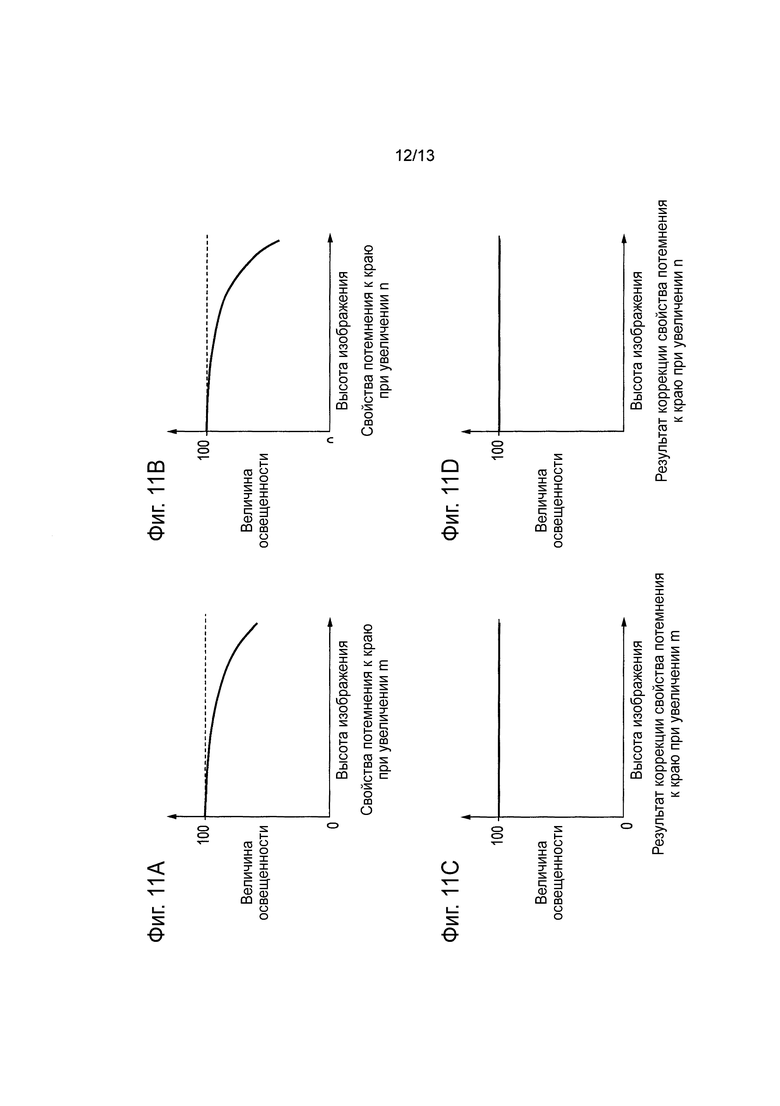
Фиг. 11A-11D являются диаграммами, иллюстрирующими примеры свойств потемнения к краю макросъемочного объектива, имеющего свойства, показанные на фиг. 2, и результаты коррекции потемнения к краю с использованием значений оптической коррекции, полученных согласно первому варианту осуществления.
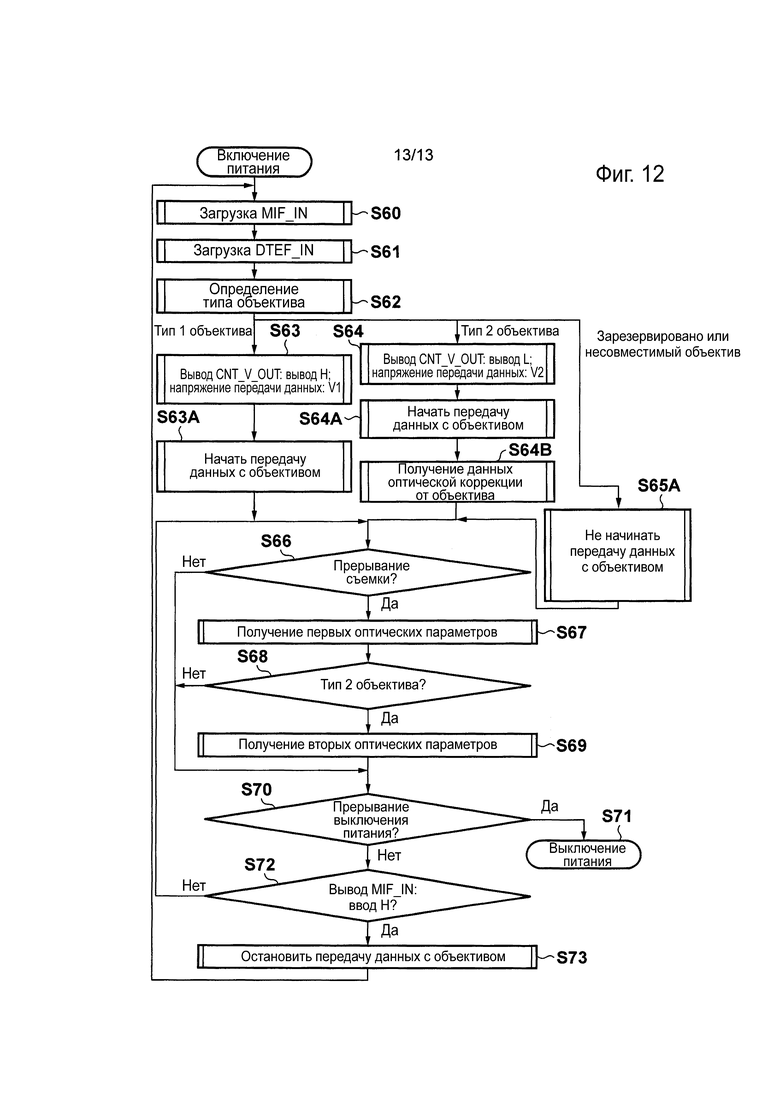
Фиг. 12 является блок-схемой последовательности операций, иллюстрирующей обработку для определения типа сменного объектива и обработку приема оптических параметров, выполняемых посредством блока управления камерой, согласно второму варианту осуществления настоящего изобретения.
Описание предпочтительных вариантов осуществления
Иллюстративные варианты осуществления настоящего изобретения теперь будут описываться подробно в соответствии с сопровождающими чертежами.
Первый вариант осуществления
Фиг. 1 является блок-схемой, иллюстрирующей пример функциональной конфигурации системы цифровой камеры типа сменного объектива, служащей в качестве примера устройства захвата изображения согласно первому варианту осуществления настоящего изобретения. Система камеры сконфигурирована из камеры 10 и сменного объектива 100, который является блоком объектива, который может присоединяться к/отсоединяться от камеры 10. Держатель 1 является механизмом для присоединения сменного объектива 100 к камере 10 в отсоединяемом состоянии и включает в себя точки электрического соединения для обеспечения возможности камере 10 предоставлять питание сменному объективу 100, обеспечения возможности камере 10 и сменному объективу 100 осуществлять связь друг с другом и так далее. Держатель 1 разделен на секцию, предоставляемую в камере 10, и секцию, предоставляемую в сменном объективе 100, но проиллюстрирован на фиг. 1 как одиночный блок для простоты.
Датчик изображения (элемент формирования изображений) 11 является устройством фотоэлектрического преобразования, имеющим множество пикселей. Датчик 11 изображения использует каждый пиксель, чтобы выполнять фотоэлектрическое преобразование сюжетного изображения, сформированным посредством объектива 101 формирования изображений внутри сменного объектива 100 и выводит аналоговый электрический сигнал, соответствующий сюжетному изображению. Блок 12 аналого-цифрового преобразования (A/D) преобразовывает аналоговый электрический сигнал, выведенный из датчика 11 изображения, в цифровой сигнал. Блок 13 обработки изображений формирует данные изображения посредством применения различных типов обработки изображений к цифровому сигналу, выводимому блоком 12 аналого-цифрового преобразования. Блок 13 обработки изображений включает в себя блок 130 оптической коррекции, который обеспечивает функцию оптической коррекции для коррекции влияния, обусловленного оптическими свойствами объектива 101 формирования изображений, на изображение посредством обработки изображений, и другой блок 131 обработки, который выполняет то, что известно как обработка проявления, такая как обработка интерполяции пикселей, обработка сигналов светимости, обработка сигналов цвета и так далее. Данные изображения, формируемые посредством блока 13 обработки изображений, отображаются в блоке 14 отображения, записываются в носителе 15 данных, таком как карта памяти, или подобное.
Память 16 используется в качестве буфера обработки для блока 13 обработки изображений и в качестве запоминающего устройства для программ, исполняемых блоком 18 управления камерой, что будет упоминаться позже. Память 16 используется в качестве запоминающего устройства для данных оптической коррекции, упоминаемых позже, которые определяют значения оптической коррекции, используемые блоком 130 оптической коррекции, в качестве запоминающего устройства для данных GUI, таких как экраны меню, отображаемые камерой 10 в блоке 14 отображения, и так далее.
Блок 17 операционного ввода является группой устройств ввода, через которые пользователь вводит инструкции в камеру 10, и включает в себя переключатель питания для включения/выключения питания, переключатель съемки для начала записи изображений, переключатель выбрать/OK для осуществления настроек в различных типах меню и так далее. Блок 18 управления камерой включает в себя микрокомпьютер и управляет всеми операциями системы камеры, такими как управление блоком 13 обработки изображений и управление связью со сменным объективом 100, посредством исполнения программ, сохраненных в памяти 16.
Блок 102 привода объектива, обеспеченный в сменном объективе 100, приводит в действие исполнительный механизм, мотор и подобное объектива 101 формирования изображений под управлением блока 103 управления объективом. Исполнительный механизм, мотор и подобное объектива 101 формирования изображений перемещает или управляет фокусным объективом, объективом с переменным фокусным расстоянием, апертурой, объективом стабилизации изображения и так далее, предоставленными в объективе 101 формирования изображений. Блок 103 управления объективом включает в себя микрокомпьютер и управляет блоком 102 привода объектива в соответствии с сигналами управления, принимаемыми от блока 18 управления камерой через держатель 1. Память 104 используется в качестве запоминающего устройства для различных типов данных, используемых блоком 103 управления объективом.
Фиг. 4 является блок-схемой, иллюстрирующей пример конфигурации для связи между блоком 18 управления камерой и блоком 103 управления объективом, показанными на фиг. 1.
Сначала будут описываться выводы, предоставленные в держателе 1.
Вывод 1-1 LCLK является выводом для тактового сигнала связи, выводимого в сменный объектив 100 из камеры 10. Вывод 1-2 DCL является выводом для передаваемых данных, выводимых в сменный объектив 100 из камеры 10. Вывод 1-3 DLC является выводом для передаваемых данных, выводимых в камеру 10 из сменного объектива 100.
Вывод 1-4 MIF является выводом для обнаружения, что сменный объектив 100 был присоединен к камере 10. Микрокомпьютер (называемый ниже микрокомпьютер камеры) 20 внутри блока 18 управления камерой обнаруживает, что сменный объектив 100 был присоединен к камере 10 на основе напряжения на выводе 1-4 MIF.
Вывод 1-5 DTEF является выводом для обнаружения типа сменного объектива 100, присоединенного к камере 10. Микрокомпьютер 20 камеры обнаруживает тип сменного объектива 100, присоединенного к камере 10, на основе напряжения на выводе 1-5 DTEF.
Вывод 1-6 VBAT является выводом для предоставления приводного питания (VM), используемого в различных типах операций помимо управления связью, из камеры 10 в сменный объектив 100. Вывод 1-7 VDD является выводом, который предоставляет питание управления связью (VDD), используемое в управлении связью, из камеры 10 в сменный объектив 100. Вывод 1-8 DGND является выводом, который соединяет систему управления связью между камерой 10 и сменным объективом 100 с землей. Вывод 1-9 PGND является выводом для соединения механических приводящих систем, включающих в себя исполнительный механизм, мотор и подобное, предоставленных в камере 10 и сменном объективе 100, с землей.
Согласно настоящему варианту осуществления к камере 10 может присоединяться множество типов сменных объективов 100, имеющих разные напряжения связи с камерой 10. Ради простоты и чтобы способствовать пониманию, последующее описание предполагает, что имеется два типа сменных объективов 100, идентифицируемых камерой 10 на основе напряжения на выводе 1-5 DTEF. Конкретно эти типы являются первым сменным объективом (первым блоком объектива) и вторым сменным объективом (вторым блоком объектива), который имеет другое напряжение связи, нежели первый объектив.
Отметим, что "тип", обнаруживаемый на основе напряжения на выводе 1-5 DTEF, указывает на "тип", классифицируемый на основе типов оптических параметров, необходимых для идентификации значения оптической коррекции, и не обязательно соответствует тому, что известно как "тип модели". Дополнительно "тип" сменного объектива и типы оптических параметров, необходимых для идентификации значения оптической коррекции, могут сохраняться в связи друг с другом заранее, например, в памяти 16.
В настоящем варианте осуществления первый сменный объектив является сменным объективом, для которого оптические параметры, необходимые для идентификации значения оптической коррекции, являются информацией, обеспечивающей возможность идентификации фокусного расстояния (единица: мм), съемочного расстояния (единица: см) и значения апертуры. Информация, обеспечивающая возможность идентификации фокусного расстояния, является, например, значением фокусного расстояния, положением объектива с переменным фокусным расстоянием или подобным. Информация, обеспечивающая возможность идентификации съемочного расстояния, является, например, значением съемочного расстояния, положением фокусного объектива или подобным. Информация, обеспечивающая возможность идентификации значения апертуры, является, например, значением апертуры, числовым значением, соответствующим значению апертуры, или подобным.
С другой стороны, второй сменный объектив является сменным объективом, для которого параметры, необходимые для идентификации значения оптической коррекции, являются информацией, способной идентифицировать значение апертуры и увеличение. Информация, обеспечивающая возможность идентификации увеличения, является, например, значением увеличения, информацией о положении оптического компонента, который управляет увеличением или подобным. Макросъемочный объектив является примером сменного объектива, который соответствует второму сменному объективу. Увеличение макросъемочного объектива изменяется в зависимости от оптического компонента, чье положение изменяется, когда вращается кольцо изменения фокусного расстояния. Соответственно, информация о положении механизма изменения увеличения, такого как кольцо изменения фокусного расстояния, может использоваться в качестве информации о положении оптического компонента, который управляет увеличением, которая в свою очередь служит в качестве информации, обеспечивающей возможность идентификации увеличения.
Блок 21 источника питания камеры, предоставленный в блоке 18 управления камерой, преобразовывает напряжение аккумулятора, подаваемое от аккумулятора, установленного в камере 10, в напряжение, требуемое для управления соответствующими составными частями. В настоящем варианте осуществления предполагается, что блок 21 источника питания камеры формирует напряжения V1, V2, V3 и VM.
Первое напряжение V1 является напряжением питания, которое служит в качестве напряжения управления связью (VDD) для первого и второго сменных объективов и служит в качестве напряжения связи первого сменного объектива. Второе напряжение V2 служит в качестве напряжения связи второго сменного объектива. Третье напряжение V3 является напряжением питания, служащим в качестве рабочего питания для микрокомпьютера 20 камеры. Четвертое напряжение VM является напряжением питания, служащим в качестве приводного напряжения для первого и второго сменных объективов.
Когда подается команда включения питания с использованием переключателя питания блока 17 операционного ввода, микрокомпьютер 20 камеры выводит сигнал для переведения переключателя 22 во включенное состояние из вывода CNT_VDD_OUT и начинает подачу VDD и VM из камеры 10 в сменный объектив 100. Когда отдается команда выключения питания, микрокомпьютер 20 камеры переводит переключатель 22 в выключенное состояние посредством остановки вывода сигнала из вывода CNT_VDD_OUT и останавливает предоставление VDD и VM из камеры 10 в сменный объектив 100.
Микрокомпьютер 20 камеры осуществляет связь со сменным объективом 100 посредством блока 23 преобразования напряжения. Микрокомпьютер 20 камеры включает в себя вывод LCLK_OUT, который выводит тактовый сигнал связи, вывод DCL_OUT, который выводит передаваемые данные в сменный объектив, и вывод DLC_IN, который принимает ввод передаваемых данных от сменного объектива. Тактовый сигнал связи и передаваемые данные являются сигналами связи.
Микрокомпьютер 20 камеры также включает в себя вывод MIF_IN для обнаружения, что сменный объектив 100 был присоединен, вывод DTEF_IN для идентификации типа сменного объектива 100 и вывод CNT_V_OUT, который выводит сигнал переключения напряжения связи в блок 23 преобразования напряжения.
Дополнительно микрокомпьютер 20 камеры включает в себя вывод CNT_VDD_OUT, который выводит сигналы для переведения переключателя 22 во включенное и выключенное состояния, вывод для соединения с блоком 13 обработки изображений и вывод для соединения с блоком 17 операционного ввода.
Микрокомпьютер 211 в блоке 103 управления объективом (называемый ниже микрокомпьютер объектива) связывается с микрокомпьютером 20 камеры посредством блока 23 преобразования напряжения блока 18 управления камерой. Микрокомпьютер 211 объектива включает в себя вывод LCLK_IN, который принимает ввод тактового сигнала связи, вывод DLC_OUT, который выводит передаваемые данные в камеру 10, вывод DCL_IN, который принимает ввод передаваемых данных из камеры 10, и вывод для соединения с блоком 102 привода объектива. В дополнение блок 103 управления объективом включает в себя блок 214 источника питания объектива, который формирует рабочее напряжение для микрокомпьютера 211 объектива из VDD.
Далее будет описываться обнаружение присоединения сменного объектива 100 к камере 10. Вывод MIF_IN микрокомпьютера 20 камеры подсоединяется к источнику питания посредством сопротивления R2 (100 KΩ), и, таким образом, когда объектив не присоединен, его значение напряжения является H (высоким). Однако вывод MIF_IN соединяется с GND в сменном объективе 100, когда сменный объектив (первый и второй сменные объективы) 100 присоединен, и, таким образом, его значение напряжения падает до L (низкого), когда сменный объектив 100 присоединен, независимо от типа сменного объектива 100.
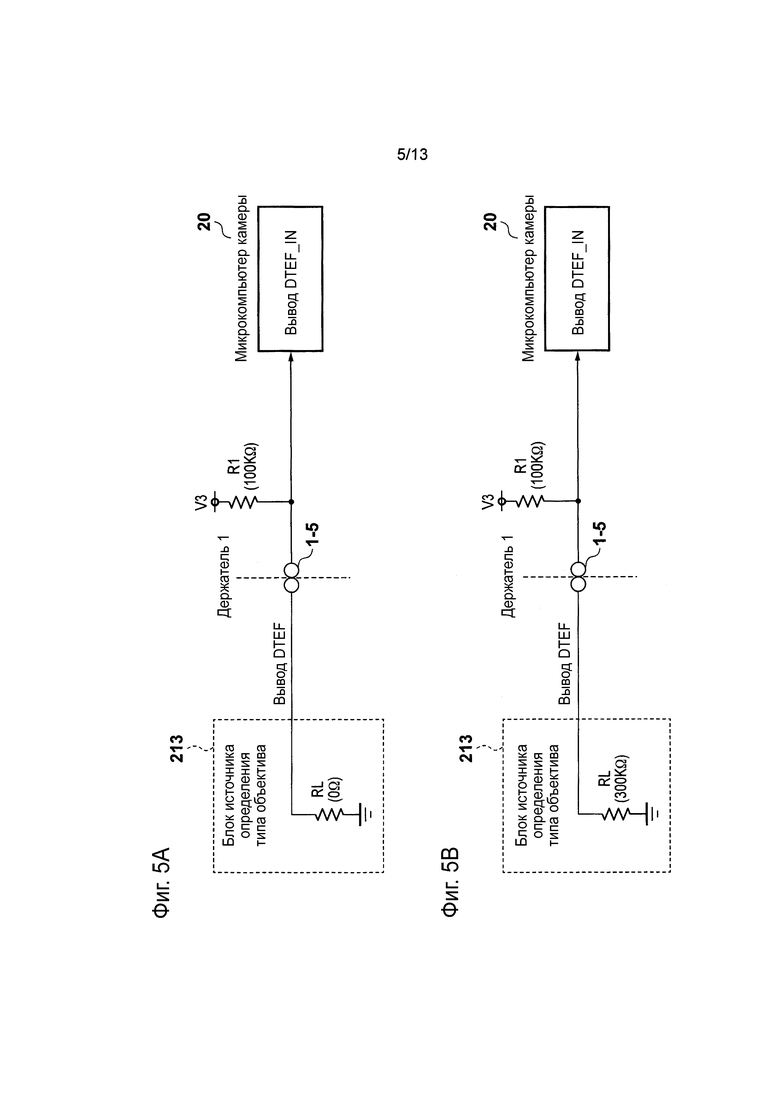
Фиг. 5A и 5B являются диаграммами, иллюстрирующими примеры конфигурации блока 213 источника определения типа объектива, предоставленного в блоке 103 управления объективом. Блок 213 источника определения типа объектива выполнен из сопротивления RL стороны сопутствующего устройства, предоставленного между выводом DTEF, предоставленным в держателе 1, и GND. Значение сопротивления для сопротивления RL устанавливается заранее в соответствии с типом сменного объектива. Например, предполагается 0 Ом на сопротивлении RL, предоставленном в первом сменном объективе, показанном на фиг. 5A, тогда как предполагается 300 KΩ на сопротивлении RL, предоставленном во втором сменном объективе, показанном на фиг. 5B.
В камере 10 сопротивление R1 стороны камеры (на, например, 100 KΩ) соединено между выводом DTEF держателя 1 и рабочим напряжением питания (V3) микрокомпьютера 20 камеры; дополнительно вывод DTEF соединен с выводом DTEF_IN микрокомпьютера 20 камеры. Вывод DTEF_IN микрокомпьютера 20 камеры имеет функцию аналого-цифрового преобразования (здесь функция 10 битного аналого-цифрового преобразования с входным диапазоном, равным 0-1,0 В).
Теперь будет описываться работа, выполняемая микрокомпьютером 20 камеры для определения типа сменного объектива. Микрокомпьютер 20 камеры определяет тип присоединенного сменного объектива в соответствии со значением напряжения, вводимого на вывод DTEF_IN. Конкретно микрокомпьютер 20 камеры выполняет аналого-цифровое преобразование входного значения напряжения и определяет тип объектива посредством сравнения значения после аналого-цифрового преобразования с эталоном определения типа объектива, сохраненным микрокомпьютером 20 камеры заранее.
Например, в случае, когда присоединен первый сменный объектив, находится, что значение напряжения, введенного на вывод DTEF_IN, после аналого-цифрового преобразования равняется приблизительно 0x0000, посредством отношения сопротивления RL/(R1+RL) с использованием 100 кОм для R1 и 0 Ом для RL. Соответственно, микрокомпьютер 20 камеры обнаруживает, что AD-преобразованное значение вывода DTEF_IN находится в пределах диапазона от 0x0000 до 0x007F, который является первой опорной точкой определения типа объектива, и определяет, что присоединенный сменный объектив является первым сменным объективом.
С другой стороны, в случае, когда присоединен второй сменный объектив, находится, что значение напряжения, введенное на вывод DTEF_IN, после аналого-цифрового преобразования равняется приблизительно 0x02FF, посредством отношения сопротивления RL/(R1+RL) с использованием 100 KΩ для R1 и 300 кОм для RL. Соответственно, микрокомпьютер 20 камеры обнаруживает, что значение вывода DTEF_IN после аналого-цифрового преобразования находится в пределах диапазона от 0x0280 до 0x037F, который является второй опорной точкой определения типа объектива, и определяет, что присоединенный сменный объектив является вторым сменным объективом.
Как описано ранее, микрокомпьютер 20 камеры определяет тип присоединенного сменного объектива 100 на основе значения напряжения, введенного на вывод DTEF_IN. Логическим уровнем сигнала, выводимого из вывода CNT_V_OUT, затем управляют в соответствии с результатом определения типа сменного объектива 100. Конкретно в случае, когда было определено из значения напряжения на выводе DTEF_IN, что присоединенный сменный объектив 100 является первым сменным объективом, микрокомпьютер 20 камеры управляет напряжением связи на V1 посредством вывода сигнала уровня H из вывода CNT_V_OUT. С другой стороны, в случае, когда было определено, что присоединенный сменный объектив 100 является вторым сменным объективом, микрокомпьютер 20 камеры управляет напряжением связи на V2 посредством вывода сигнала уровня L из вывода CNT_V_OUT.
В случае, когда обнаруживается значение напряжения, которое находится вне диапазона вышеупомянутых первого и второго эталонов определения типа объектива, как значение напряжения (значение после аналого-цифрового преобразования) на выводе DTEF_IN, микрокомпьютер 20 камеры определяет, что был присоединен "несовместимый объектив", который является сменным объективом, который не является совместимым с камерой 10. Альтернативно определением может быть "зарезервировано" при предположении, что определение типа объектива не может корректно выполняться. В этом случае микрокомпьютер 20 камеры не связывается со сменным объективом 100.
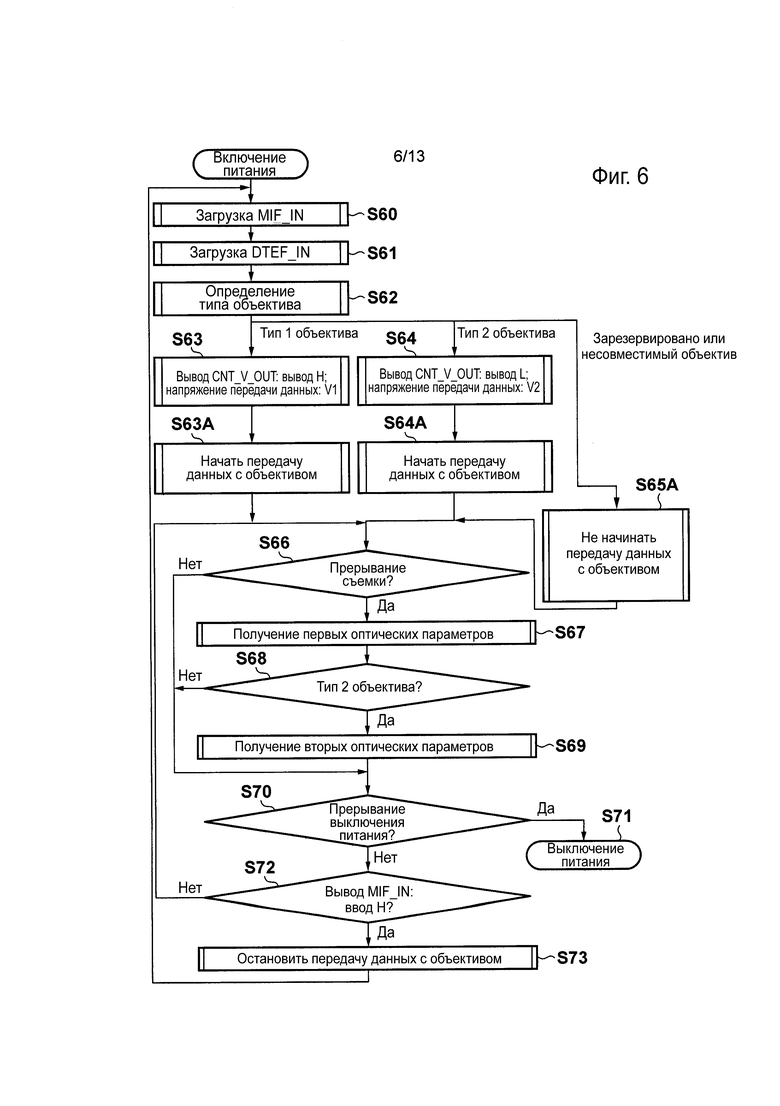
Фиг. 6 является блок-схемой последовательности операций, иллюстрирующей обработку для определения типа сменного объектива и обработку приема оптических параметров, выполняемых посредством микрокомпьютера 20 камеры, согласно настоящему варианту осуществления. Обработка, показанная на фиг. 6, выполняется микрокомпьютером 20 камеры, исполняющим программы, сохраненные в памяти 16.
Микрокомпьютер 20 камеры загружает значение напряжения H или L из вывода MIF_IN на S60 и загружает значение напряжения из вывода DTEF_IN на S61. Отметим, что S60 и S61 могут выполняться одновременно.
В случае, когда значение напряжения на выводе MIF_IN равняется L и сменный объектив 100 был обнаружен как являющийся присоединенным, на S62 микрокомпьютер 20 камеры определяет тип присоединенного сменного объектива 100 на основе (результата AD-преобразования) значения напряжения на выводе DTEF_IN. В случае, когда было определено, что присоединенный сменный объектив 100 является первым сменным объективом (показанным как "тип 1 объектива" на фиг. 6), на S63 микрокомпьютер 20 камеры устанавливает напряжение связи на V1 посредством вывода H из вывода CNT_V_OUT и переводит обработку на S63A. Однако в случае, когда было определено, что присоединенный сменный объектив 100 является вторым сменным объективом (показанным как "тип 2 объектива" на фиг. 6), на S64 микрокомпьютер 20 камеры устанавливает напряжение связи на V2 посредством вывода L из вывода CNT_V_OUT, и переводит обработку на S64A. Дополнительно в случае, когда присоединенный сменный объектив 100 не является ни первым, ни вторым сменным объективом и было осуществлено определение "несовместимого объектива" или "зарезервировано", микрокомпьютер 20 камеры переводит обработку на S65A.
На S63A и S64A микрокомпьютер 20 камеры начинает связь со сменным объективом 100 с использованием установленного напряжения связи. На S65A, микрокомпьютер 20 камеры не начинает связь с присоединенным сменным объективом 100, и вместо этого выполняет обработку для выдачи предупреждения или подобного пользователю.
На S66 микрокомпьютер 20 камеры определяет, произошло ли или нет прерывание съемки, которое начинает запись изображения, вследствие манипулирования переключателем съемки блока 17 операционного ввода. В случае, когда прерывания съемки не произошло, микрокомпьютер 20 камеры переводит обработку на S70. Однако в случае, когда прерывание съемки произошло, на S67 микрокомпьютер 20 камеры получает первые оптические параметры посредством осуществления связи со сменным объективом 100.
Как описано выше, первые оптические параметры являются информацией, необходимой для идентификации значения оптической коррекции для сменного объектива типа 1 объектива, и являются базовыми оптическими параметрами сменного объектива, включающими в себя информацию, обеспечивающую возможность, по меньшей мере, идентификации фокусного расстояния, съемочного расстояния и значения апертуры. Так как эта информация может использоваться при обработке отличной от оптической коррекции в настоящем варианте осуществления, первые оптические параметры получаются независимо от того, какой тип объектива был определен. Другими словами, в настоящем варианте осуществления первые оптические параметры получаются на S67 даже в случае, когда было определено, что присоединен второй сменный объектив.
Далее на S68 и S69 микрокомпьютер 20 камеры получает вторые оптические параметры от сменного объектива 100 в случае, когда сменный объектив 100 был определен на S62 как второй сменный объектив. Вторые оптические параметры являются оптическими параметрами, необходимыми для идентификации значения оптической коррекции второго сменного объектива. Так как вторые оптические параметры обычно включают в себя, по меньшей мере, некоторые из параметров, полученных как первые оптические параметры, здесь получаются, по меньшей мере, вторые оптические параметры, которые отличаются от первых оптических параметров. В настоящем варианте осуществления вторые оптические параметры включают в себя информацию, обеспечивающую возможность, по меньшей мере, идентификации увеличения. Хотя значение оптической коррекции может идентифицироваться из увеличения и значения апертуры в случае, когда второй объектив является макросъемочным объективом, значение апертуры уже было получено как часть первых оптических параметров и, таким образом, не должно получаться на S69. Таким образом, вторые оптические параметры, которые перекрываются с первыми оптическими параметрами, не должны повторно получаться.
На S70 микрокомпьютер 20 камеры определяет, произошло ли или нет прерывание выключения питания вследствие выключения переключателя питания блока 17 операционного ввода; в случае, когда прерывание выключения питания произошло, на S71 выполняется обработка выключения питания. С другой стороны, в случае, когда прерывание выключения питания не произошло, на S72 микрокомпьютер 20 камеры определяет, является ли или нет напряжение на выводе MIF_IN уровнем H, или другими словами, был ли или нет сменный объектив 100 удален из камеры 10. В случае, когда напряжение уровня H было введено из вывода MIF_IN, на S73 микрокомпьютер 20 камеры останавливает связь со сменным объективом 100 и возвращает обработку на S60. Однако в случае, когда напряжение уровня H не введено из вывода MIF_IN, микрокомпьютер 20 камеры возвращает обработку на S66.
Блок 18 управления камерой может определять тип сменного объектива 100, который присоединен, и может получать оптические параметры, необходимые для идентификации значения оптической коррекции для присоединенного сменного объектива 100 посредством выполнения такой обработки связи.
Хотя пример на фиг. 6 иллюстрирует способ, в котором тип присоединенного сменного объектива 100 определяется в соответствии со значением напряжения, введенного на вывод DTEF_IN, следует отметить, что может использоваться другой способ определения. Например, информация относительно типа объектива может приниматься от сменного объектива 100 немедленно после S63A и тип объектива может определяться на основе нее, без выполнения определения типа объектива из S61 и S62 и установки выводимого напряжения на основе типа объектива на S63A и S64A.
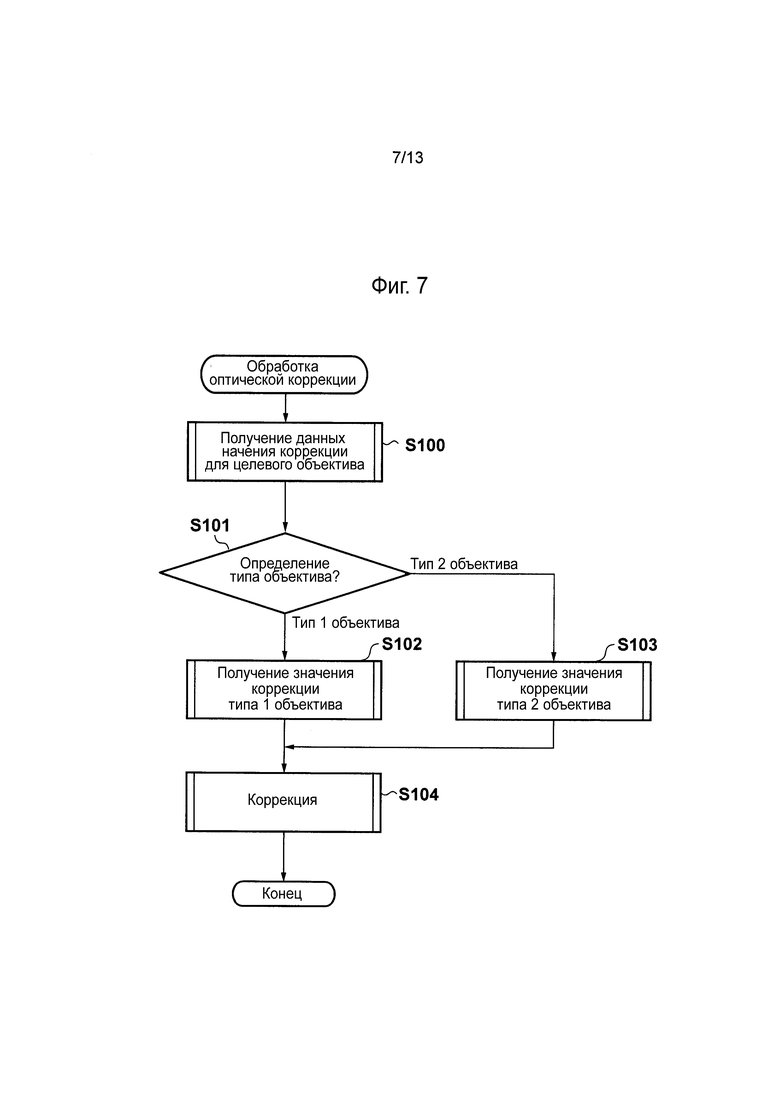
Далее будет описываться обработка оптической коррекции, выполняемая посредством блока 130 оптической коррекции. Фиг. 7 является блок-схемой последовательности операций, иллюстрирующей обработку оптической коррекции, выполняемую посредством блока 130 оптической коррекции.
Сначала на S100 блок 130 оптической коррекции получает, из таблицы данных оптической коррекции, хранимой в памяти 16, данные оптической коррекции, включающие в себя значение оптической коррекции, соответствующее сменному объективу 100, используемому в процессе съемки.
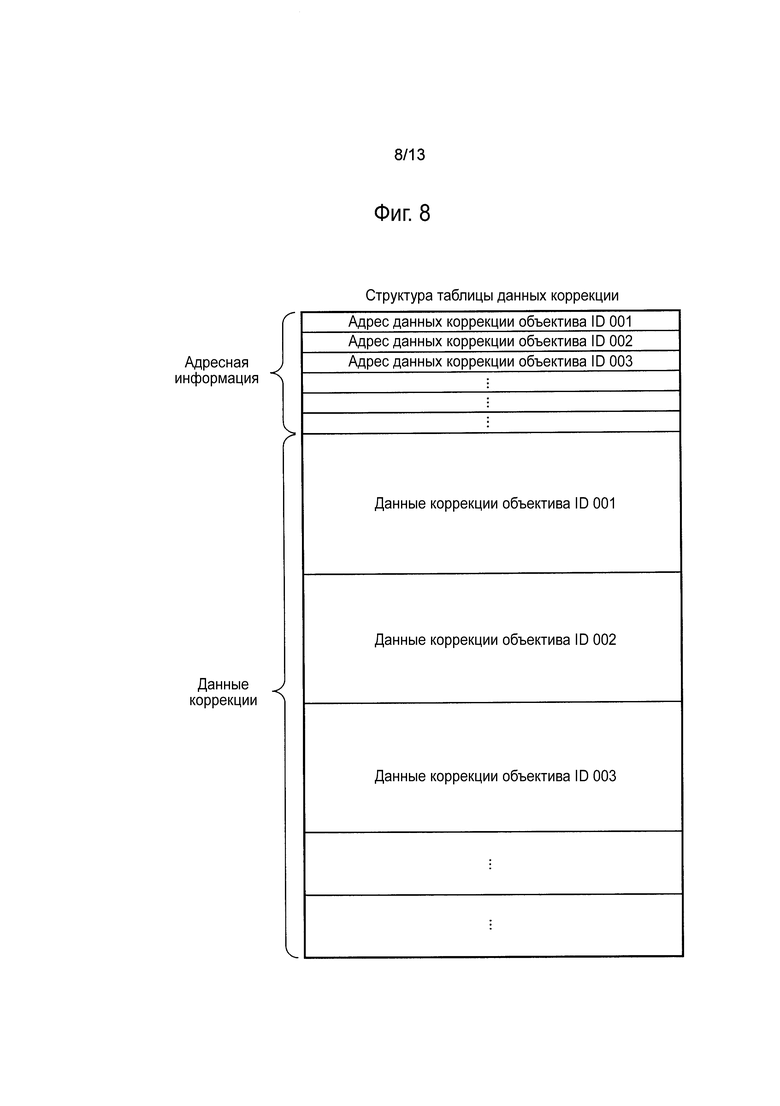
Память 16 хранит таблицу данных оптической коррекции, имеющую структуру, такую как та, что показана на фиг. 8, и таблица хранит данные оптической коррекции для множества моделей сменных объективов. ID (идентификатор) объектива, служащий в качестве идентификационной информации модели сменного объектива 100, и информации для идентификации начального адреса, в котором хранятся соответствующие данные оптической коррекции, записывается в области адресной информации, обеспеченной наверху таблицы. Данные оптической коррекции, соответствующие каждому ID объектива, хранятся в последовательности в области данных коррекции. Как будет описываться ниже, область данных коррекции сконфигурирована так, что значение оптической коррекции может получаться из первых оптических параметров для сменного объектива, классифицированного как первый сменный объектив, и из вторых оптических параметров для сменного объектива, классифицированного как второй сменный объектив. Сначала блок 130 оптической коррекции осуществляет поиск ID сменного объектива, используемого в ходе съемки, из области адресной информации, и получает сохраненные данные оптической коррекции из адреса, полученного из области адресной информации.
Далее на S101 обработка, выполняемая посредством блока 130 оптической коррекции, ответвляется на основе результата определения типа объектива, выполненного посредством блока 18 управления камерой на S62, когда питание включается, когда сменный объектив 100 заменяется, или подобное, как описано выше. В случае, когда сменный объектив 100, который был присоединен, является первым сменным объективом, на S102 блок 130 оптической коррекции получает значение оптической коррекции из данных коррекции с использованием первых оптических параметров. С другой стороны, в случае, когда сменный объектив 100, который был присоединен, является вторым сменным объективом, на S103 блок 130 оптической коррекции получает значение оптической коррекции из данных коррекции с использованием вторых оптических параметров. На S104 блок 130 оптической коррекции осуществляет процесс оптической коррекции на основе значений оптической коррекции, полученных на этапах S102 и S103.
Фиг. 9A иллюстрирует структуру данных коррекции, соответствующих первому сменному объективу. Данные коррекции конфигурируются из области адресной информации и области значений коррекции.
На фиг. 9A и 9B OptInfo1[n], OptInfo2[m] и OptInfo3[p] (где n, m и p являются каждый целыми числами, большими чем или равными 0) соответственно показывают массивы следующих оптических параметров, которые могут применяться к сменному объективу.
OptInfo1[n]: информация фокусного расстояния
OptInfo2[m]: информация съемочного расстояния
OptInfo3[p]: информация значения апертуры
Отметим, что для информации значений, которые могут принимать, по существу, непрерывные значения, такие как фокусное расстояние и съемочное расстояние, предварительно определенные дискретные значения могут храниться как значения массива.
Для первого сменного объектива каждый набор трех типов оптических параметров устанавливается в области адресной информации вместе с информацией для идентификации адреса хранения значения оптической коррекции, соответствующего этому набору. Адрес хранения является адресом внутри области значений коррекции. Значения оптической коррекции, соответствующие каждому набору оптических параметров, хранятся в последовательности в области значений коррекции.
Соответственно, значение оптической коррекции может получаться из области значений коррекции посредством указания на область адресной информации с использованием первых оптических параметров, использованных в течение съемки.
Фиг. 9B иллюстрирует структуру данных коррекции, соответствующих второму сменному объективу. Данные коррекции конфигурируются из области адресной информации и области значений коррекции.
На фиг. 9A и 9B OptInfo3[p] и OptInfo4[q] (где p и q являются, каждый, целыми числами, большими чем или равными 0) соответственно показывают массивы следующих оптических параметров, которые могут применяться к сменному объективу.
OptInfo3[p]: информация значения апертуры
OptInfo4[q]: информация увеличения
Для второго сменного объектива каждый набор двух типов оптических параметров устанавливается в области адресной информации вместе с информацией для идентификации адреса, где хранится значение оптической коррекции, соответствующее этому набору. Адрес хранения является адресом внутри области значений коррекции. Значения оптической коррекции, соответствующие каждому набору оптических параметров, хранятся в последовательности в области значений коррекции.
Соответственно, значение оптической коррекции может получаться из области значений коррекции посредством указания на область адресной информации с использованием вторых оптических параметров, использованных в ходе съемки.
Фиг. 10 является диаграммой, иллюстрирующей пример значений оптической коррекции, хранимых для каждого из наборов оптических параметров, показанных на фиг. 9A и 9B. Фиг. 10 иллюстрирует пример значения коррекции потемнения к краю. Для хранения в пространстве хранения значения величины освещенности для дискретных высот изображения h0 по h4 хранятся как значения оптической коррекции, и значение коррекции может получаться для заданной высоты изображения посредством аппроксимации дискретного значения оптической коррекции посредством полиномиального выражения и формирования кривой коррекции.
Таким способом значения оптической коррекции сохраняются для каждого набора оптических параметров, необходимых для идентификации величин оптической коррекции, на основе типа объектива и модели объектива (ID). Отметим, что наборы оптических параметров, сохраненных в области адресной информации, также могут браться как дискретные наборы, и для наборов, которые не сохраняются, значения оптической коррекции могут формироваться посредством интерполяции множества значений коррекции, соответствующих наборам таких же значений.
Далее будет описываться способ коррекции с использованием обработки изображений, используя в качестве примера потемнение к краю. Сначала высота изображения, которая соответствует расстоянию от центра изображения, находится для каждого пикселя в данных изображения, подлежащих коррекции, и по кривой коррекции находятся величины освещенности, соответствующие высотам изображения. Далее усиление на основе обращения величины освещенности применяется к каждому значению пикселя. Потемнение к краю может корректироваться посредством исполнения этих обработок для каждого пикселя в данных изображения.
Фиг. 11A-11D являются диаграммами, иллюстрирующими примеры свойств потемнения к краю макросъемочного объектива и результаты коррекции, полученные посредством применения способа настоящего варианта осуществления, таким же образом как на фиг. 3A-3D. Фиг. 11A и 11B иллюстрируют свойства потемнения к краю макросъемочного объектива, когда увеличение равняется m и когда увеличение равняется n, соответственно, и являются, таким образом, такими же, как фиг. 3A и 3B.
Однако в отличие от результатов коррекции, проиллюстрированных на фиг. 3C и 3D, полученных с использованием значений оптической коррекции, идентифицированных без принятия в рассмотрение увеличения, коррекция в настоящем варианте осуществления выполняется с использованием значений оптической коррекции, которые принимают увеличение в рассмотрение. Соответственно, как показано на фиг. 11C и 11D, яркость равняется, по существу, 100 для всех высот изображения независимо от увеличения, и, таким образом, может получаться высокоточное скорректированное изображение.
Здесь был описан случай, в котором корректируется потемнение к краю, служащее в качестве примера оптического свойства, которое вызывает ухудшение изображения. Однако базовый способ коррекции, в котором значение коррекции на основе высоты изображения, находится посредством формирования кривой коррекции из дискретных наборов высот изображения и величин коррекции, соответствующих наборам оптических параметров, является одним и тем же для других оптических свойств, таких как искажение и хроматическая аберрация увеличения, как это имеет место для потемнения к краю.
Таким образом, согласно настоящему варианту осуществления, определяется тип объектива, для которого наборы оптических параметров, необходимых для идентификации значения оптической коррекции, отличаются от типа к типу, соответствующие оптические параметры получаются на основе типа блока объектива, и идентифицируется значение оптической коррекции. Соответственно, является возможным реализовывать более точную оптическую коррекцию, чем стандартный способ нахождения значения оптической коррекции из наборов общих типов оптических параметров, которые не изменяются от типа блока объектива к типу блока объектива.
Отметим, что ради простоты, и чтобы обеспечивать понимание, настоящий вариант осуществления описывает случай, в котором определяются два типа блоков объектива (или наборов оптических параметров, необходимых для идентификации значения оптической коррекции). Однако изобретение не ограничено случаем, где имеется два типа блоков объектива или наборов оптических параметров, и может также применяться таким же образом для большего количества типов.
Например, настоящий вариант осуществления описывает случай, в котором макросъемочный объектив служит в качестве блока объектива, имеющего вторые оптические параметры, и информация о положении механизма для изменения увеличения служит в качестве вторых оптических параметров. Однако блок объектива, имеющий вторые оптические параметры, не должен быть макросъемочным объективом, и вторые оптические параметры могут быть информацией относительно положения оптического компонента, который управляет фокусным расстоянием, съемочным расстоянием или подобным. В этом случае информация относительно положения оптического компонента является информацией о положении механизма, который осуществляет приведение в движение объектива, чтобы изменять фокусное расстояние, съемочное расстояние или подобное. Является возможным использовать информацию относительно положения оптического компонента, который управляет фокусным расстоянием, съемочным расстоянием или подобным, полученную в качестве вторых оптических параметров, чтобы идентифицировать значение оптической коррекции, нежели использовать конкретное значение фокусного расстояния (единица: мм), съемочного расстояния (единица: см) или подобное, полученное как первые оптические параметры. С использованием системы, в которой информация о положении оптического компонента имеет более высокое разрешение, чем фокусное расстояние (единица: мм), съемочное расстояние (единица: см) и подобное, высокоточная оптическая коррекция может реализовываться посредством использования информации о положении оптического компонента.
Например, первый блок объектива может быть объективом, способным обеспечивать только конкретные значения (например, XX мм или подобное) для фокусного расстояния, тогда как второй блок объектива может быть объективом, способным обеспечивать фокусное расстояние как положения оптического компонента, который управляет фокусным расстоянием (например, информацию о положении объектива с переменным оптическим увеличением). В этом случае наборы оптических параметров, необходимых для идентификации значения оптической коррекции, могут быть одними и теми же, как для первого блока объектива, так и для второго блока объектива.
Информация о положении оптического компонента может быть информацией о положении, полученной при разделении диапазона движения оптического компонента на предварительно определенное число. Например, в случае блока объектива, в котором диапазон движения объектива переменной мощности разделяется на 32, информация о положении может предоставляться как значение 0, 1, 2 и так далее вплоть до 31. Микрокомпьютер 20 камеры может индексировать фокусное расстояние из информации о положении объектива на основе отношения между диапазоном фокусного расстояния и количеством делений для этого блока объектива. Другими словами, фокусное расстояние не идентифицируется с использованием информации о положении оптического компонента самой по себе. Информация диапазона фокусного расстояния и количество делений для блока объектива могут получаться, когда начинается связь с объективом.
В случае, когда присоединенный объектив был определен как первый блок объектива, на S67 получаются первые оптические параметры, включающие в себя информацию фокусного расстояния, выраженную в мм. Тем временем в случае, когда присоединенный объектив был определен как второй блок объектива, на S67 получаются первые оптические параметры, включающие в себя информацию фокусного расстояния, выраженную в мм, и на S69 информация фокусного расстояния, выраженная, по меньшей мере, как информация о положении оптического компонента, получается в качестве вторых оптических параметров.
Информация фокусного расстояния, выраженная как информация о положении оптического компонента, используется, чтобы идентифицировать величину оптической коррекции для второго блока объектива. Это обеспечивает возможность получения более точного значения оптической коррекции, чем в случае, когда используется информация фокусного расстояния, выраженная в мм. Это из-за того, что, как описано выше, информация о положении оптического компонента имеет более точную и детальную (то есть высокого разрешения) связь с фокусным расстоянием.
Таким способом точность значения оптической коррекции может также улучшаться посредством переключения между разными оптическими параметрами, выражающими одну и ту же информацию (фокусное расстояние) в зависимости от типа блока объектива. Переключение может также использоваться в комбинации с конфигурацией, в которой набор оптических параметров, необходимых для идентификации значения оптической коррекции, различается между первым блоком объектива и вторым блоком объектива, именно вышеупомянутым макросъемочным объективом и другим типом объектива.
Например, в случае, когда был присоединен первый блок объектива, дополнительно определяется, является ли блок объектива выполненным с возможностью обеспечения информации фокусного расстояния в мм только в качестве фокусного расстояния в мм, или как положение оптического компонента, который управляет фокусным расстоянием. В случае последнего, в качестве информации фокусного расстояния получается положение оптического компонента, который управляет, по меньшей мере, фокусным расстоянием.
Второй вариант осуществления
Далее будет описываться второй вариант осуществления настоящего изобретения.
Базовая конфигурация устройства захвата изображения и выводов, обеспеченных в держателе 1 в настоящем варианте осуществления, являются такими же, как описанные в первом варианте осуществления, но настоящий вариант осуществления предполагает, что второй сменный объектив выполнен с возможностью передавать данные оптической коррекции из объектива в камеру. Соответственно, данные оптической коррекции сохраняются в памяти 104, предоставленной во втором сменном объективе. Данные оптической коррекции, хранимые здесь, имеют структуру, проиллюстрированную на фиг. 9B.
Фиг. 12 является блок-схемой последовательности операций, иллюстрирующей обработку определения типа объектива, обработку приема данных оптической коррекции и обработку для приема оптических параметров, используемых в течение съемки, которые являются необходимыми, чтобы идентифицировать значение оптической коррекции, выполняемые посредством микрокомпьютера 20 камеры в системе камеры согласно настоящему варианту осуществления.
Эти обработки выполняются посредством микрокомпьютера 20 камеры, исполняющего программы, сохраненные в памяти 16. На фиг. 12 этапам, которые выполняют одни и те же обработки, как показаны на фиг. 6 и описаны в первом варианте осуществления, даны такие же ссылочные позиции, и их описание пропускается.
Хотя обработка, показанная на фиг. 12, является в основном такой же, как обработка в первом варианте осуществления, обработка отличается тем, что микрокомпьютер 20 камеры выполняет связь, чтобы получать данные оптической коррекции от сменного объектива 100 на S64B после того, как тип объектива определяется как тип 2 объектива на S62 и связь начинается на S64A. Посредством этой обработки данные оптической коррекции, сохраненные в памяти 104 сменного объектива 100, передаются в камеру 10 и сохраняются в памяти 16 камеры 10. Переданные данные оптической коррекции имеют структуру данных, показанную на фиг. 9B, и конфигурируются так, что значение оптической коррекции может идентифицироваться из первых оптических параметров, полученных на S67, и вторых оптических параметров, полученных на S69.
Отметим, что блок объектива может уведомлять камеру, к которой этот блок объектива присоединен, об оптических параметрах (которые могут предоставляться камере), хранимых самим этим блоком объектива. Например, блок 103 управления объективом может уведомлять камеру, имеет ли блок объектива, в качестве параметров, выражающих оптические свойства, только конкретные значения или как конкретные значения, так и информацию о положении оптического компонента. Альтернативно блок 103 управления объективом может уведомлять камеру об информации, обеспечивающей возможность камере определять, имеет ли блок объектива только конкретные значения или как конкретные значения, так и информацию о положении оптического компонента.
Отметим, что в случае, когда блок объектива имеет как конкретные значения, так и информацию о положении оптического компонента в качестве параметров, показывающих оптические свойства, данные оптической коррекции, сохраненные в памяти 104, являются данными оптической коррекции, соответствующими информации о положении оптического компонента. Это из-за того, что, как описано выше, использование информации о положении оптического компонента предоставляет более высокую точность и более высокое разрешение, чем конкретные значения.
В дополнение в этом случае информация, требуемая для преобразования информации о положении оптического компонента в конкретные значения, передается в камеру, когда блок объектива и камера начинают связь. Например, в случае, когда блок объектива имеет информацию о положении оптического компонента, которая регулирует фокусное расстояние, информация относительно диапазона фокусного расстояния блока объектива и его количество делений передается в камеру.
Таблица данных оптической коррекции, хранимых посредством памяти 16, имеет структуру, показанную на фиг. 8, и является необходимым добавлять данные оптической коррекции, принятые от сменного объектива 100, в таблицу, так что на эти данные можно ссылаться позже. Как описано ранее, в случае, когда сменный объектив был удален и затем повторно присоединен, обработка возвращается на S60 через S73, после чего обработка повторяется. В этом случае, чтобы делать ненужным осуществление связи для получения данных оптической коррекции снова на S64B, определяется, присутствуют ли уже данные оптической коррекции, соответствующие сменному объективу, который был присоединен, в памяти 16, и в случае, когда данные уже присутствуют, S64B может пропускаться. Делая так, является возможным уменьшить время обработки, требуемое для передачи данных оптической коррекции, в случае, когда камера уже хранит данные оптической коррекции.
Посредством такой обработки получаются данные оптической коррекции для второго сменного объектива, и оптические параметры для идентификации значения коррекции получаются из полученных данных оптической коррекции.
Обработка оптической коррекции, выполняемая посредством блока 130 оптической коррекции, может быть такой же, как обработка в первом варианте осуществления. Так как данные оптической коррекции, полученные от второго сменного объектива, являются уже сохраненными в памяти 16, значение коррекции может идентифицироваться и обработка коррекции может выполняться посредством выполнения обработки, проиллюстрированной на фиг. 7.
Посредством передачи данных оптической коррекции из блока объектива в камеру и использования этих данных, чтобы идентифицировать значение оптической коррекции, зарегистрированное в камере, как в настоящем варианте осуществления, соответствующая оптическая коррекция может выполняться даже в случае, когда данные оптической коррекции, соответствующие присоединенному блоку объектива, не зарегистрированы в памяти 16.
Хотя настоящий вариант осуществления описывает второй сменный объектив, передающий данные оптической коррекции в камеру, настоящее изобретение не ограничено таким одним вариантом осуществления, и множество типов сменных объективов могут передавать данные оптической коррекции в камеру. В дополнение наборы типов объективов, которые передают данные оптической коррекции в камеру, и оптические параметры, требуемые этими типами объективов, не ограничены описанными в настоящем варианте осуществления и могут соответствовать множеству наборов.
Другие варианты осуществления
Аспекты настоящего изобретения также могут реализовываться посредством компьютера системы или устройства (или устройств, таких как CPU или MPU), который считывает и исполняет программу, записанную в устройстве памяти, чтобы выполнять функции вышеописанных вариантов осуществления, и посредством способа, этапы которого выполняются посредством компьютера системы или устройства посредством, например, считывания и исполнения программы, записанной в устройстве памяти, чтобы выполнять функции вышеописанных вариантов осуществления. Для этой цели в компьютер предоставляется программа, например, посредством сети или из носителя записи различных типов, служащего в качестве устройства памяти (например, машиночитаемого носителя).
В то время как настоящее изобретение было описано со ссылкой на иллюстративные варианты осуществления, следует понимать, что изобретение не ограничено раскрытыми иллюстративными вариантами осуществления. Объем последующей формулы изобретения должен иметь самую широкую интерпретацию так, чтобы охватывать все такие модификации и эквивалентные структуры и функции.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ И СПОСОБ ЕГО УПРАВЛЕНИЯ | 2008 |
|
RU2394388C1 |
| УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ ИЗОБРАЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЗАХВАТА ИЗОБРАЖЕНИЯ | 2010 |
|
RU2498376C2 |
| ЦИФРОВОЙ ФОТОАППАРАТ | 2009 |
|
RU2510866C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОЦЕНКИ ВРАЩАТЕЛЬНОЙ СТАБИЛЬНОСТИ ТОРИЧЕСКИХ КОНТАКТНЫХ ЛИНЗ | 2018 |
|
RU2774315C2 |
| КАМЕРА И КОМПЛЕКТУЮЩАЯ К КАМЕРЕ | 2013 |
|
RU2655042C1 |
| АКСЕССУАР ДЛЯ КАМЕРЫ И КАМЕРА | 2013 |
|
RU2556296C2 |
| КАМЕРА И КОМПЛЕКТУЮЩАЯ К КАМЕРЕ | 2013 |
|
RU2602404C2 |
| УСТРОЙСТВО ЗАХВАТА ИЗОБРАЖЕНИЙ И СПОСОБ УПРАВЛЕНИЯ УСТРОЙСТВОМ ЗАХВАТА ИЗОБРАЖЕНИЙ | 2010 |
|
RU2453067C1 |
| УСТРОЙСТВО ЗАХВАТА ИЗОБРАЖЕНИЯ | 2013 |
|
RU2599628C2 |
| ЛИНЗОВОЕ УСТРОЙСТВО И ФОТОКАМЕРА | 2008 |
|
RU2399942C2 |
Изобретение относится к устройствам захвата изображений и способам управления ими. Техническим результатом является обеспечение оптической коррекции снятого изображения. Предложено устройство захвата изображения с присоединяемым к нему и отсоединяемым блоком объектива. Устройство захвата выполнено с возможностью выполнения функции оптической коррекции для коррекции влияния, обусловленного оптическими свойствами блока объектива, используемого при съемке, на снятое изображение посредством применения обработки изображений с использованием значения оптической коррекции. Устройство содержит средство получения оптических параметров, средство коррекции снятого изображения. При этом средство коррекции осуществляет коррекцию снятого изображения на основе оптических свойств присоединенного блока объектива посредством применения обработки изображений с использованием значения оптической коррекции к снятому изображению. 4 н. и 8 з.п. ф-лы, 20 ил.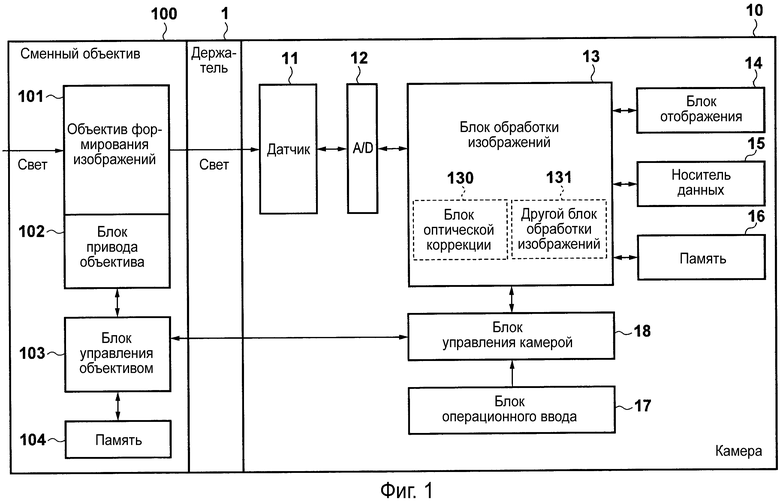
1. Устройство захвата изображения с присоединяемым к нему и отсоединяемым блоком объектива, выполненное с возможностью выполнения функции оптической коррекции для коррекции влияния, обусловленного оптическими свойствами блока объектива, используемого при съемке, на снятое изображение посредством применения обработки изображений с использованием значения оптической коррекции, при этом устройство содержит:
средство получения для получения от присоединенного блока объектива оптических параметров относительно оптических свойств, присутствующих в течение съемки, при этом средство получения выполнено с возможностью получать первые оптические параметры в случае, когда присоединенный блок объектива является первым блоком объектива, и получать вторые оптические параметры, включающие в себя параметры, отличные от первых оптических параметров, в случае, когда присоединенный блок объектива является вторым блоком объектива; и
средство коррекции для коррекции снятого изображения на основе оптических свойств присоединенного блока объектива посредством применения обработки изображений с использованием значения оптической коррекции к снятому изображению,
при этом средство коррекции выполнено с возможностью использовать значение оптической коррекции на основе данных оптической коррекции и первых оптических параметров в случае, когда присоединенный блок объектива является первым блоком объектива, и использовать значение оптической коррекции на основе данных оптической коррекции и вторых оптических параметров в случае, когда присоединенный блок объектива является вторым блоком объектива,
причем отличные параметры включают в себя информацию о положении механизма для изменения увеличения второго блока объектива.
2. Устройство захвата изображения по п. 1, в котором вторые оптические параметры включают в себя информацию о положении оптического компонента, при этом информация о положении соответствует параметрам, относящимся к оптическим свойствам, включенным в качестве конкретного значения в первые оптические параметры.
3. Устройство захвата изображения по п. 1, в котором первые оптические параметры являются набором оптических параметров, необходимых для идентификации значения оптической коррекции первого блока объектива, и вторые оптические параметры являются набором оптических параметров, необходимых для идентификации значения оптической коррекции второго блока объектива.
4. Устройство захвата изображения по п. 2, в котором, при получении вторых оптических параметров, средство получения выполнено с возможностью получать оптические параметры помимо оптических параметров, полученных в качестве первых оптических параметров.
5. Устройство захвата изображения по п. 2, в котором средство коррекции выполнено с возможностью идентифицировать значение оптической коррекции, подлежащее применению к изображению, посредством ссылки, с использованием оптических параметров, полученных средством получения, на память, в которой хранится в качестве данных оптической коррекции значение коррекции, соответствующее набору первых оптических параметров или вторых оптических параметров.
6. Устройство захвата изображения по п. 5, в котором средство получения выполнено с возможностью получать идентификационную информацию модели объектива от присоединенного блока объектива; и
значение коррекции, соответствующее набору первых оптических параметров или вторых оптических параметров, сохраняется заранее в памяти в ассоциации с идентификационной информацией модели.
7. Устройство захвата изображения по п. 3, в котором средство коррекции выполнено с возможностью идентифицировать значение оптической коррекции, подлежащее применению к изображению, с использованием значения оптической коррекции, принятого от присоединенного блока объектива, и оптических параметров, полученных средством получения.
8. Блок объектива, выполненный с возможностью присоединения к и отсоединения от устройства захвата изображения, содержащий:
средство связи для связи с устройством захвата изображения, к которому блок объектива присоединен;
память, в которой хранится значение оптической коррекции для коррекции посредством обработки изображений ухудшения изображения, вызванного оптическими свойствами блока объектива;
средство уведомления для уведомления устройства захвата изображения, к которому присоединен блок объектива, что присутствуют первые оптические параметры и вторые оптические параметры, которые являются отличными от первых оптических параметров и которые соответствуют значению оптической коррекции; и
средство управления для передачи значения оптической коррекции первых оптических параметров и вторых оптических параметров на устройство захвата изображения, к которому присоединен блок объектива, посредством средства связи,
причем вторые оптические параметры включают в себя информацию о положении механизма для изменения увеличения блока объектива.
9. Блок объектива по п. 8, в котором вторые оптические параметры являются оптическими параметрами, используемыми, чтобы идентифицировать значение оптической коррекции блока объектива.
10. Блок объектива по п. 9, в котором, при передаче вторых оптических параметров, средство управления выполнено с возможностью передавать оптические параметры помимо оптических параметров, переданных в качестве первых оптических параметров.
11. Способ управления устройством захвата изображения с присоединяемым к нему и отсоединяемым от него блоком объектива, выполненным с возможностью выполнения функции оптической коррекции для коррекции влияния, обусловленного оптическими свойствами блока объектива, используемого при съемке, на снятое изображение посредством применения обработки изображений с использованием значения оптической коррекции, при этом способ содержит:
этап, на котором получают от присоединенного блока объектива оптические параметры, касающиеся оптических свойств, присутствующих в течение съемки, включающий в себя этап, на котором получают первые оптические параметры в случае, когда присоединенный блок объектива является первым блоком объектива, и этап, на котором получают вторые оптические параметры, включающие в себя параметры, отличные от первых оптических параметров, в случае, когда присоединенный блок объектива является вторым блоком объектива; и
этап, на котором корректируют снятое изображение на основе оптических свойств присоединенного блока объектива посредством применения обработки изображений с использованием значения оптической коррекции к снятому изображению,
при этом на этапе коррекции используют значение оптической коррекции на основе данных оптической коррекции и первых оптических параметров в случае, когда присоединенный блок объектива является первым блоком объектива, и используют значение оптической коррекции на основе данных оптической коррекции и вторых оптических параметров в случае, когда присоединенный блок объектива является вторым блоком объектива,
причем отличные параметры включают в себя информацию о положении механизма для изменения увеличения второго блока объектива.
12. Носитель данных, хранящий программу, которая, при исполнении устройством захвата изображения, предписывает устройству захвата изображения выполнять способ по п. 11.
| JP 2010206374 A, 16.09.2010 | |||
| JP 2000184247 A, 30.06.2000 | |||
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| УСТРОЙСТВО ЗАПИСИ И ВОСПРОИЗВЕДЕНИЯ ИЗОБРАЖЕНИЯ, УСТРОЙСТВО СЪЕМА ИЗОБРАЖЕНИЯ И СПОСОБ КОРРЕКЦИИ ХРОМАТИЧЕСКОЙ АБЕРРАЦИИ | 2003 |
|
RU2321964C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ ПАРАМЕТРОВ ИЗОБРАЖЕНИЯ | 2005 |
|
RU2282313C1 |

