Ссылки на сопутствующие заявки
Настоящая заявка связана с рассматриваемой параллельно заявкой на полезную модель № 13028480 под названием "Устройство и способ определения состояния натяжения цепи железнодорожного ручного тормоза", поданной одновременно с настоящей заявкой. Содержание этой одновременно рассматриваемой заявки включено в настоящее описание путем отсылки.
Область техники, к которой относится изобретение
Настоящее изобретение по существу относится к железнодорожным ручным тормозам и, более конкретно, к устройству и способу для косвенного определения состояния натяжения создающей силу цепи железнодорожного ручного тормоза и, еще более конкретно, к датчику, установленному в корпусе железнодорожного ручного тормоза и к определению по существу линейного перемещения удерживающей собачки железнодорожного ручного тормоза в ответ на натяжение создающей силу цепи во время по меньшей мере частичного включения ручного тормоза.
Предпосылки к созданию изобретения
Хорошо известно, что каждый железнодорожный вагон имеет ручной тормоз, в котором используется создающая силу цепь, которую вручную выбирают или отпускают для включения и выключения тормозов вагона. Одним из недостатков применения ручных тормозов, к которым относится настоящее изобретение, является то, что некоторые из ручных тормозов железнодорожного состава не выключаются перед началом движения состава, что приводит к заклиниванию колес и появлению лысок на колесах, что требует ремонта или даже замены всего колеса.
Таким образом существует потребность в устройстве и способе, которые можно применять для определения, когда в создающей силу цепи имеется натяжение и, более конкретно, когда создающая силу цепь была по меньшей мере частично натянута или остается по меньшей мере частично натянутой.
Краткое описание изобретения
Согласно настоящему изобретению предлагается устройство определения натяжения цепи для железнодорожного ручного тормоза. Железнодорожный ручной тормоз по существу содержит корпус, механизм натяжения и ослабления цепи, по меньшей мере частично расположенный внутри корпуса, и удерживающую собачку, при этом каждое тело удерживающей собачки выполнено с возможностью поворота, а ее участок, входящий в зацепление с храповым колесом, отходит от тела и взаимодействует с храповым колесом механизма натяжения и ослабления цепи. Железнодорожный ручной тормоз далее содержит средство для поджимания участка, входящего в зацепление с храповым колесом, для введения его в зацепление с храповым колесом. Устройство для определения натяжения цепи содержит удлиненное отверстие, проходящее сквозь толщину тела удерживающей собачки так, что удерживающая собачка установлена с возможностью по существу линейного возвратно-поступательного движения в направлении, по существу поперечном оси ее вращения. Имеется мишень датчика, проксимальный конец которой расположен на внешней поверхности тела удерживающей собачки, и прикреплен к ней. Мишень датчика проходит в направлении, по существу противоположном направлению участка удерживающей собачки, взаимодействующего с храповым колесом. Мишень датчика расположена с возможностью по существу линейного возвратно-поступательного движения с телом. Датчик установлен в непосредственной близости к верхнему концу корпуса и имеет отверстие, расположенное по существу на одной прямой с мишенью датчика. Отверстие имеет размер, позволяющий вставить в него участок дистального конца мишени датчика, при этом участок дистального конца входит в отверстие во время по меньшей мере частичного включения ручного тормоза и выходит из отверстия во время выключения ручного тормоза. Между внутренней поверхностью корпуса и внешней поверхностью тела вставлено поджимающее средство. Во время по меньшей мере частичного включения ручного тормоза храповое колесо перемещает тело удерживающей собачки в направлении к датчику и устанавливает участок дистального конца мишени датчика в отверстие датчика в оперативном определяющем совмещении с ним. Поджимающее средство перемещает тело удерживающей собачки в противоположном направлении к храповому колесу во время выключения ручного тормоза, заставляя участок дистального конца мишени датчика выйти из отверстия. Датчик генерирует управляющий сигнал в ответ на определение или отсутствие определения участка дистального конца.
Согласно настоящему изобретению предлагается способ определения по меньшей мере частично включенного состояния железнодорожного ручного тормоза. Способ содержит этап, на котором устанавливают элемент для возвратно-поступательного движения в по существу линейном направлении во время включения и выключения ручного тормоза. Далее, устанавливают датчик в непосредственной близости к верхнему концу корпуса железнодорожного тормоза в положении для определения по существу линейного движения элемента во время по меньшей мере частичного включения ручного тормоза. Затем перемещают элемент по существу в линейном направлении во время по меньшей мере частичного включения ручного тормоза. Наконец, определяют по существу линейное перемещение элемента во время по меньшей мере частичного включения ручного тормоза.
Цели изобретения
Таким образом, одной из главных целей настоящего изобретения является создание устройства для определения состояния натяжения создающей силу цепи железнодорожного ручного тормоза.
Другой целью настоящего изобретения является создание устройства для определения натяжения цепи для железнодорожного ручного тормоза, которое содержит удерживающую собачку, выполненную с возможностью перемещения в направлении, поперечном оси ее вращения.
Еще одной целью настоящего изобретения является создание устройства для определения натяжения цепи железнодорожного ручного тормоза, которое содержит датчик на верхнем конце корпуса железнодорожного ручного тормоза.
Другой целью настоящего изобретения является создание устройства определения натяжения цепи для железнодорожного ручного тормоза, которое содержит средство для поджимания удерживающей собачки в зацепление с храповым колесом железнодорожного ручного тормоза.
Еще одной целью настоящего изобретения является создание устройства для определения натяжения цепи для железнодорожного ручного тормоза, которое является экономичным в производстве.
В дополнение к некоторым целям и преимуществам настоящего изобретения, которые были описаны выше с некоторой степенью конкретности, специалистам будут более понятны различные другие цели и преимущества настоящего изобретения из нижеследующего подробного описания со ссылками на приложенные чертежи и из приложенной формулы изобретения.
Краткое описание чертежей
Фиг.1 - вид в перспективе железнодорожного ручного тормоза, в котором используется устройство для определения натяжения цепи по настоящему изобретению.
Фиг.2 - сечение железнодорожного ручного тормоза по линии II-II на фиг.1.
Фиг.3 - сечение железнодорожного ручного тормоза по линии III-III на фиг.1.
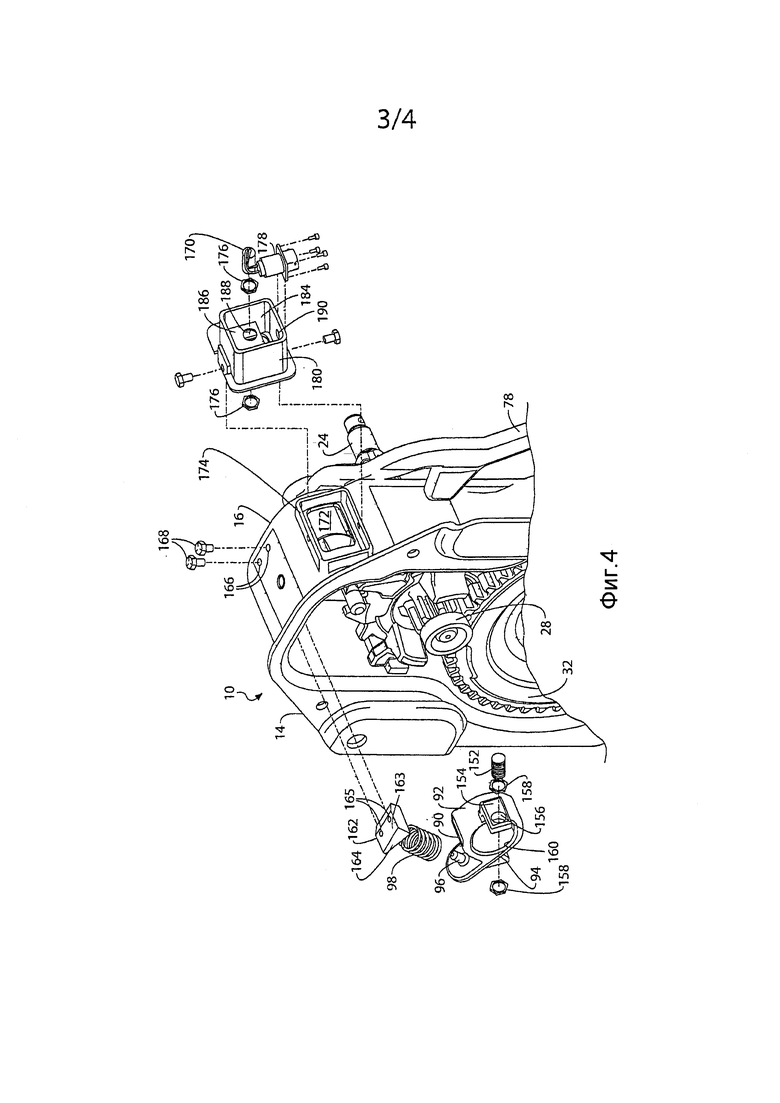
Фиг.4 - разнесенный вид в перспективе устройства для определения натяжения цепи в комбинации с железнодорожным ручным тормозом по фиг.1-3, показанным частично.
Фиг.5A-5C - частичные сечения, иллюстрирующие работу устройства для определения натяжения цепи по фиг.4.
Краткое описание различных вариантов настоящего изобретения
Прежде чем приступать к более подробному описанию настоящего изобретения, следует отметить, что для ясности и облегчения понимания одинаковые компоненты, выполняющие одинаковые функции, на разных чертежах обозначены одинаковыми ссылочными позициями.
Согласно настоящему изобретению предлагаются устройство и способ для определения приложенного состояния железнодорожного ручного тормоза, в целом обозначенного позицией 10, которые являются средством косвенного определения состояния, когда создающая силу цепь железнодорожного ручного тормоза либо выбрана, либо отпущена во время включения ручного тормоза для соответственно по меньшей мере частичного включения или выключения тормозов железнодорожного вагона.
Настоящее изобретение показано и описано в комбинации с ручным тормозом по патенту US 4368648, выданному Хаусману и др. и правами на который владеет правопреемник по настоящей заявке, хотя специалистам понятно, что настоящее изобретение может применяться и к железнодорожным ручным тормозам другого типа, в которых используется создающая силу цепь и приводимый вручную вращающийся маховик, и такой ручной тормоз не следует толковать как фактор, ограничивающий настоящее изобретение. Содержание патента US 4368648 включено в настоящее описание путем отсылки.
Настоящее изобретение описывается на примере его предпочтительного в настоящее время варианта, показанного на фиг.1-5. Однако настоящее изобретение не ограничивается описанным вариантом и специалистам понятно, что возможны многие другие варианты изобретения, не выходящие за пределы основной концепции изобретения, и любые такие модификации также входят в объем настоящего изобретения. Предусматривается, что идеи настоящего изобретения легко могут быть применены к другим его стилям и конфигурациям.
На фиг.1-3 показан ручной тормоз 10 для железнодорожных вагонов (не показаны). В кратком изложении ручной тормоз 10 содержит по существу пустотелый корпус, в целом обозначенный позицией 14, имеющий переднюю пластину 16 и заднюю пластину 18. Имеется механизм натяжения и отпускания цепи, который содержит ручной приводной механизм, в целом обозначенный позицией 20, который по меньшей мере частично расположен на верхней части корпуса 14 и включает маховик 22, расположенный и закрепленный на одном конце приводного вала 24, выступающего за пределы внешней поверхности корпуса 14 и установленного для вращения в подшипниках 26 и 28, закрепленных в передней пластине 16 и в задней пластине 18 соответственно.
Шестерня 30 закреплена внутри корпуса 14 на приводном валу 24 для вращения с ним на противоположном конце вала и рядом с подшипником 28. Шестерня 30 находится в оперативном зацеплении с зубчатым колесом 32 для вращения цепного барабана 34, установленного в подшипниках 36 и 38, закрепленных в передней пластине 16 и задней пластине 18 соответственно в нижней части корпуса 14. Цепной барабан 34 входит в зацепления с чередующимися звеньями цепи 37, создающей силу либо для выбирания, либо для отпускания создающей силу цепи 37.
В верхней части корпуса 14 также расположен захватывающий и освобождающий механизм, в целом обозначенный позицией 40, который соединен с приводным механизмом 20, как показано на фиг.2 и 3. Этот захватывающий и освобождающий механизм 40 содержит кольцевой неподвижный кулачковый элемент 42, и вращение, и осевое перемещение которого не допускается, и подвижный кулачковый элемент 44, установленный с возможностью вращения и соосно с неподвижным кулачковым элементом 42. Подвижный кулачковый элемент 44 выполнен с возможностью вращения относительно неподвижного кулачкового элемента 42. Обойма 48 с внутренними шлицами имеет фланец 50, который концентрично окружает приводной вал 24 и находится в зацеплении наружными шлицами гайки, в целом обозначенной позицией 52, которая закреплена на резьбовом участке 25 приводного вала 24. Гайка 52 имеет фланец 54 с кольцевой фрикционной поверхностью 56, чтобы упираться в одну сторону храпового колеса 58, тогда как другая сторона храпового колеса 58 оперативно упирается во фрикционную поверхность 57 фрикционной пластины 59, концентрично прикрепленной к приводному валу 24 рядом с подшипником 26. Храповое колесо 58 является по существу дисковидным элементом, имеющим кольцевой ряд храповых зубьев, расположенных на его периферийной кромке.
Имеется удерживающая собачка 90, которая имеет тело 92, установленное для вращения в корпусе 14, и входящий в зацепление с храповиком участок 94, который отходит от тела 92 и входит в зацепление с храповым колесом 58 так, что удерживающая собачка имеет возможность перескакивать по храповому колесу при вращении храпового колеса против часовой стрелки, если смотреть на фиг.1. Следует понимать, что удерживающая собачка 90 по существу используется для того, чтобы допускать выборочное движение храпового колеса 58, которое в настоящем изобретении является вращением. Удлиненный элемент 96 расположен на теле 92 по существу напротив входящего в зацепление с храповиком участка 94 и служит седлом для поджимающего элемента 98, который поджимает входящий в зацепление с храповиком участок 94 для его зацепления с храповым колесом 58. Известный поджимающий элемент 98 вставлен между внутренней поверхностью корпуса 14 и наружной поверхностью удерживающей собачки 90. Таким образом, удерживающая собачка 90 движется между первым положением, в котором храповое колесо имеет возможность двигаться в одном направлении, и вторым положением. в котором храповое колесо 58 имеет возможность двигаться в противоположном направлении.
Как далее показано на фиг.1 и 2, предпочтительно может иметься механизм быстрого освобождения, который содержит освобождающий вал 70, который установлен во втулке 73 освобождающего вала, закрепленной перпендикулярно в передней пластине 16 над приводным механизмом 20. Рукоятка 78 быстрого освобождения расположена на внешнем конце освобождающего вала 70 и закреплена на нем известным способом, например сваркой. Рукоятка 78 освобождения может быть любой из используемых в настоящее время рукояток и ее подробное описание опускается для краткости. Преимущественно, тело 92 удерживающей собачки 90 может быть установлено для вращения на освобождающем валу 70.
При работе для включения тормозов железнодорожного вагона маховик 22 вращают против часовой стрелки, как показано на фиг.1, и такое вращение передается через приводной вал 24 и шестерню 30 на зубчатое колесо 32 так, чтобы оно вращалось против часовой стрелки и тем самым выбирало слабину цепи 37, создающей силу. До того как цепь 37, создающая силу, начнет натягиваться, приводной вал 24, шестерня 30, гайка 52 и захватывающая обойма 48 вращаются как единый узел при вращении маховика 22. Когда цепь 37, создающая силу, начинает натягиваться, это натяжение отражается на зубчатом колесе 32 и передается обратно через шестерню 30 на захватывающую обойму 48. Сопротивление вращению захватывающей обоймы 48, которая соединена шлицами с гайкой 52, заставляет гайку подаваться на резьбе 25 и тем самым зажимать храповое колесо 58 между фрикционными поверхностями 56 и 57. Когда храповое колесо 58 зажато, продолжающееся вращение маховика 22 заставляет приводной вал 24, храповое колесо 58 и гайку 52 (вместе с фрикционными пластинами 59) вращаться как единый узел, пока цепь 37, создающая силу, не будет натянута в требуемой степени, тогда как удерживающая собачка 90 и, более конкретно, ее участок 94, входящий в зацепление с храповиком, перескакивает по храповому колесу 58. Когда цепь 37, создающая силу, в достаточной степени натянута, вращение или приложение крутящего момента к маховику 22 прекращается и удерживающая собачка 90, вошедшая в зацепление с зажатым храповым колесом 58, препятствует разматыванию цепи 37, создающей силу, поскольку удерживающая собачка 90 используется для вращения храпового колеса 58 только против часовой стрелки, как показано на фиг.1, или вращения по часовой стрелке, как показано на фиг.5A-5C.
После включения тормоза (не показаны) железнодорожного вагона можно постепенно отпустить.
Для постепенного отпускания тормозов железнодорожного вагона маховик 22 немного поворачивают по часовой стрелке, как показано на фиг.1, для частичного отпускания гайки 52 и тем самым для уменьшения силы, с которой зажимается храповое колесо 58, вращению которого препятствует удерживающая собачка 90. Начальное вращение по часовой стрелке маховика 22 приводит к соответствующему вращению шестерни 30 и зубчатого колеса 32, что приводит к ослаблению натяжения цепи 37. Продолжающееся вращение по часовой стрелке маховика 22 приводит к полному снятию нагрузки с создающей силу цепи 37, при этом зубчатое колесо 32 продолжает вращаться, пока намоточный барабан 35 не выберет всю слабину цепи, т.е. длину цепи, которая была выбрана на фазе включения тормоза. Когда вся слабина цепи будет выбрана, дальнейшее вращение зубчатого колеса 32, шестерни 30 и гайки 52 прекращается и тормоза оказываются полностью выключенными. Вращение маховика 22 против часовой стрелки ограничено пальцем 60 приводного вала, который выступает в паз 61, сформированный в гайке 52.
Когда имеется механизм быстрого освобождения, тормоза железнодорожного вагона можно быстро выключить. Быстрое выключение включенных тормозов железнодорожного вагона осуществляется поворотом рукоятки 78 быстрого освобождения (которая нормально находится во включенном положении) против часовой стрелки, как показано на фиг.1, в положение освобождения.
Как показано на фиг. 4-5с, согласно настоящему изобретению предлагается устройство, в целом обозначенное позицией 150, для определения состояния по меньшей мере частичного включения железнодорожного ручного тормоза в ответ на натяжение создающей силу цепи 37. Устройство 150 содержит элемент 152, являющийся мишенью датчика, установленный в верхней части корпуса 14 с возможностью по существу линейного перемещения во время включения и выключения ручного тормоза, и датчик 170, установленный в положении для определения линейного движения мишени 152 датчика в ответ на по меньшей мере частично включенное и выключенное состояние железнодорожного ручного тормоза 10.
Мишень 152 датчика, лучше всего показанная на фиг.4, по существу является удлиненным элементом, расположенным на наружной поверхности тела 92 удерживающей собачки 90 и прикрепленным к ней. Мишень 152 датчика проходит в направлении, по существу противоположном направлению участка 94, входящего в зацепление с храповиком удерживающей собачки 90. Для крепления мишени 152 в настоящем изобретении удерживающая собачка 90 содержит фланец 154, прикрепленный к телу 92 и отходящий от него. Фланец 154 имеет отверстие 156, проходящее сквозь его толщину и имеющее такой размер, чтобы сквозь него могла проходить мишень 152 датчика. Преимущественно тело мишени 152 датчика имеет наружную резьбу, позволяющую устанавливать мишень 152 на фланец 154 с помощью пары крепежных гаек 158, по существу охватывающих между собой толщину фланца 154, хотя согласно настоящему изобретению можно использовать и другие известные крепежные средства.
Мишень 152 датчика расположена с возможностью по существу линейных возвратно-поступательных движений вместе с телом 92. Для получения такого по существу линейного возвратно-поступательного движения тело 92 удерживающей собачки 90 имеет удлиненное сквозное отверстие 160, которое проходит сквозь толщину тела 92 так, что удерживающая собачка установлена для такого по существу линейного возвратно-поступательного движения в направлении, по существу поперечном оси 91 ее вращения. Мишень 152 датчика далее по существу расположена соосно с длиной удлиненного отверстия 160, как лучше всего показано на фиг.4 и 5а-5с. Мишень 152 датчика по существу является магнитом или по меньшей мере ее часть имеет магнитные свойства.
Хотя известная конструкция поджимающего элемента 98 оказалась подходящей для большинства вариантов применения, в настоящем изобретении используется более длинный поджимающий элемент 98, который может прилагать большую силу к участку 94, входящему в зацепление с храповиком так, чтобы способствовать его зацеплению с храповым колесом 58. Соответственно, имеется адаптер или элемент 162, имеющий поверхность 163, упирающуюся во внутреннюю поверхность корпуса 14, и противоположную поверхность 164, расположенную под углом к поверхности 163. В поверхности 163 выполнена пара резьбовых отверстий 165. Корпус 14 имеет пару отверстий 166, выполненных в толщине стенки корпуса и находящихся на одной оси с резьбовыми отверстиями 165 так, чтобы адаптер 162 можно было прикрепить парой крепежных элементов 168.
Датчик 170 установлен в положении для определения по существу линейного движения мишени 152 датчика в одном из состояний железнодорожного ручного тормоза 10: в состоянии по меньшей мере частичного включения и в состоянии по меньшей мере частичного выключения. Поскольку удерживающая собачка 90 установлена для вращения на верхнем конце корпуса 14, датчик 170 установлен стационарно в непосредственной близости к верхнему концу корпуса 14. Датчик 170 может относиться к любому типу, предпочтительно датчик 170 является бесконтактным путевым выключателем. Далее, в настоящее время предпочтительно, что датчик 170 является герконом и мишень 152 по существу действует как магнит, который заставляет внутренние контакты датчика притягиваться друг к другу и замыкать электрическую цепь (не показана). Преимуществом геркона в таком варианте применения является то, что датчик 170 для своей работы не требует питания. Предпочтительный в настоящее время датчик 170 производится компанией Cherry Corporation, Pleasant Prairie, WI в серии МР2007.
В примере по фиг.1 и 5A-5C датчик 170 установлен на внешней поверхности корпуса 14. Соответственно, корпус 14 содержит отверстие 172, проходящее сквозь толщину его стенки в таком положении, чтобы мишень 152 датчика проходила через отверстие 172 и могла устанавливаться в оперативном совмещении с датчиком 170.
Хотя датчик 170 можно устанавливать любым любым известным способом, имеется корпус 180 датчика, который выполнен по существу пустотелым и который имеет пару открытых концов 182 и 184. Один открытый конец 182 корпуса 180 датчика прикреплен к корпусу 14 по меньшей мере периферийным фланцем 174, выступающим от внешней поверхности корпуса 14 и по существу совмещенным с отверстием 172 и окружающим его.
Корпус 180 датчика также имеет перегородку 186, установленную внутри между открытыми концами 182 и 184 и в которой выполнено отверстие 188, проходящее сквозь ее толщину. Датчик 170 проходит сквозь открытый конец 184 и отверстие 188 и крепится к перегородке 186 парой резьбовых крепежных элементов 176 в форме гаек. Корпус 180 датчика далее имеет отверстие 190, проходящее сквозь ее стенку так, чтобы установить электрический соединитель 178 в непосредственной близости к датчику 170, чтобы электрический соединитель был оперативно соединен и с датчиком 170 и с системой управления (не показана). Электрический соединитель 178 может относиться к типу, производимому компанией ITT Corporation, White Plaines, NY под маркой Cannon, каталожный номер MS3470W12-3P. Однако предусматривается, что датчик 170 может быть непосредственно соединен с системой управления (не показана).
Работа устройства 150 определения натяжения цепи лучше всего показана на фиг.5A-5C. Фиг.5Aа показывает состояние, при котором создающая силу цепь 37 была по меньшей мере частично натянута во время по меньшей мере частичного включения железнодорожного ручного тормоза 10 и мишень 152 датчика выступает за внешнюю поверхность корпуса 14 через отверстие 172 и находится в оперативном совмещении с датчиком 170. В настоящем изобретении в таком оперативном совмещении торцевая поверхность мишени 152 датчика расположена на заранее определенном расстоянии от торцевой поверхности датчика 170. В настоящем изобретении используется преимущество состояния железнодорожного ручного тормоза 10, согласно которому натяжение создающей силу цепи 37 возникает при повороте храпового колеса 58 на очень небольшой угол против часовой стрелки, как показано на фиг.5A, когда вращение или приложение крутящего момента к маховику 22 прекращается. Это вращение против часовой стрелки преодолевает заранее определенную силу поджимающего элемента 98 и смещает тело 92 удерживающей собачки 90 в по существу линейном направлении и на небольшое расстояние к датчику 170 и по существу поперек оси вращения 91, которая определяется валом 70. Затем по существу поперечное движение тела 92 удерживающей собачки 90 смещает удлиненное отверстие 160 к одной его стороне на валу 70 и устанавливает мишень 152 в оперативном определяющем совмещении с датчиком 170.
Хотя во время по меньшей мере частичного включения ручного тормоза происходит процесс натяжения создающей силу цепи 37, удерживающая собачка 90 перескакивает по храповому колесу 58, как показано на фиг.5B, и заранее определенная сила поджимающего элемента 98 достаточна, чтобы поджимать или смещать тело 92 удерживающей собачки 90 к храповому колесу 58. Аналогично, когда железнодорожный ручной тормоз 10 отпускают и натяжение создающей силу цепи 37 исчезает, поджимающий элемент 98 поджимает входящий в зацепление с храповиком участок 94 удерживающей собачки 90 в зацепление с храповым колесом 58, как показано на фиг.5C. В этом состоянии мишень 152 датчика отходит из оперативного определяющего совмещения с датчиком 170.
Важно отметить, что из-за геометрии храпового колеса 58 и удерживающей собачки 90 оси мишени 152 датчика и датчика 170 могут не совпадать, как лучше всего видно на фиг.5A-5B. Следовательно, эти компоненты выбирают заранее и расстояние между ними определяют заранее так, чтобы учитывать такое несовпадение осей. Поэтому оперативное определяющее совмещение в настоящем изобретении предусматривает такое несовпадение осей мишени 152 и датчика 170.
Датчик 170 электрически соединен с управляющей цепью (не показана), которая выполнена с возможностью (в комбинации) генерировать управляющий сигнал в ответ на обнаружение или отсутствие обнаружения мишени 152 датчика. В настоящее время предпочтительно генерировать такой управляющий сигнал, когда мишень 152 датчика обнаружена. Было найдено, что даже частичное выбирание создающей силу цепи 37, приводящее к по меньшей мере частичному ее натяжению, достаточно для генерирования управляющего сигнала.
Таким образом, способ определения по меньшей мере частично включенного состояния железнодорожного ручного тормоза 10 содержит этап, на котором устанавливают мишень 152 датчика для возвратно-поступательного перемещения в по существу линейном направлении во время включения и выключения ручного тормоза. Затем устанавливают датчик 170 в положение для определения этого по существу линейного движения мишени 152 датчика во время по меньшей мере частичного включения тормоза. Далее, перемещают мишень 152 датчика по существу в линейном направлении во время по меньшей мере частичного включения ручного тормоза. И, наконец, определяют с помощью датчика 170 по существу линейное движение мишени 152 датчика во время по меньшей мере частичного включения ручного тормоза. Этап установки датчика 170 может содержать этап, на котором датчик 170 устанавливают в непосредственной близости к верхнему концу корпуса 14 железнодорожного ручного тормоза 10.
Хотя настоящее изобретение было описано и показано в комбинации с железнодорожным ручным тормозом по патенту US 4368648, специалистам понятно, что настоящее изобретение может быть применено к другим железнодорожным ручным тормозам, в которых используется храповое колесо и удерживающая собачка. Например, такие другие железнодорожные тормоза описаны в патенте US 4714142, выданном Шеферду, в котором используется другая конструкция механизма захвата и освобождения в комбинации с собачкой, входящей в зацепление с храповым колесом, расположенным внутри механизма захвата и освобождения. Таким другим ручным тормозом также может быть быстроотключаемый тормоз по патенту US 7757825, выданному Майклу, и/или по патенту US 7878309, выданному Майклу и др. Эти быстроотключаемые ручные тормоза являются усовершенствованиями тормоза по патенту US 4714142 и содержат муфту с углублением и либо собачку 52 с участком 53, входящим в зацепление с храповым колесом и участком 54, входящим в зацепление с муфтой, или взаимозацепляющихся собачек 52 и 54.
Содержание патентов US 4714142; 7757825 и 7878309 включено в настоящее описание путем отсылки.
Таким образом, для специалистов очевидно, что настоящее изобретение может использоваться и в других устройствах, где применяется цепь (или любые другие удлиненные создающие силу элементы) в комбинации с зубчатым колесом и элементом, обеспечивающим возможность выборочного движения зубчатого колеса для определения, имеется или отсутствует натяжение в таком создающем силу элементе. Такое применение может быть связано, например, с лентой конвейера или цепью технологического цикла.
Датчик 170 также может быть выполнен как путевой выключатель, например, приводимый в действие рычагом, где мишень 152 датчика либо нажимает рычаг и приводит в действие выключатель во время по меньшей мере частичного включения тормоза или отпускает рычаг во время выключения ручного тормоза. Датчик 170 может также быть известным динамометрическим элементом, входящим в зацепление с концом мишени 152 датчика и выводящим величину, пропорциональную давлению, приложенному мишенью 152 датчика, при этом такое давления представляет степени натяжения создающей силу цепи 37. В таких конструкциях мишень 152 датчика необязательно должна обладать магнитными свойствами и может быть выполнена заодно с телом 92 удерживающей собачки 90.
Таким образом, вышеприведенное полное и четкое описание настоящего изобретения позволяет любому специалисту воспроизвести и использовать его. Следует понимать, что специалисты могут внести в изобретение различные изменения дополнения и замены, которые не выходят за пределы изобретательской идеи и объема защиты, определенного в приложенной формуле.




Изобретение относится к железнодорожным ручным тормозам. Железнодорожный ручной тормоз содержит пустотелый корпус, создающую силу цепь, отходящую от корпуса и соединенную с рычажной тормозной системой вагона, и цепной барабан. Также имеется механизм натяжения и отпускания цепи, содержащий приводной механизм, механизм захвата и освобождения и перемещающуюся удерживающую собачку. Тормоз также содержит фланец, расположенный на удерживающей собачке. Фланец имеет отверстие, проходящее сквозь его толщину. Мишень датчика проходит сквозь отверстие во фланце в направлении, противоположном направлению входящего в зацепление с храповым колесом участка удерживающей собачки. Отверстие проходит сквозь толщину корпуса в таком положении, чтобы сквозь это отверстие проходила мишень датчика. Датчик проходит сквозь отверстие в перегородке и закреплен на ней гайками. Поджимающее средство вставлено между внутренней поверхностью корпуса и внешней поверхностью тела удерживающей собачки. Изобретение также относится к устройству для определения натяжения цепи в железнодорожном ручном тормозе. Решение направлено на определение натяжения цепи. 3 н. и 7 з.п. ф-лы, 5 ил.
1. Устройство для определения натяжения цепи в железнодорожном ручном тормозе, содержащем корпус, создающую силу цепь, отходящую от корпуса и выполненную с возможностью соединения одним своим концом с рычажной тормозной системой железнодорожного вагона, и механизм натяжения и отпускания цепи, по меньшей мере частично расположенный в корпусе, и удерживающую собачку, содержащую тело, установленное для вращения, и входящий в зацепление с храповиком участок, отходящий от этого тела и взаимодействующий с храповым колесом механизма натяжения и отпускания цепи, при этом железнодорожный ручной тормоз также содержит средство для поджимания входящего в зацепление с храповиком участка удерживающей собачки для зацепления с храповым колесом, при этом устройство определения натяжения цепи содержит:
(a) удлиненное отверстие, проходящее сквозь толщину тела удерживающей собачки так, чтобы удерживающая собачка была установлена для по существу линейного возвратно-поступательного перемещения в направлении, по существу поперечном оси ее вращения;
(b) мишень датчика, расположенную на внешней поверхности тела удерживающей собачки и прикрепленную к ней, при этом мишень датчика проходит в направлении, по существу противоположном направлению входящего в зацепление с храповиком участка удерживающей собачки, при этом мишень датчика расположена для по существу линейного возвратно-поступательного перемещения вместе с телом;
(c) датчик, установленный в непосредственной близости к верхнему концу корпуса;
(d) благодаря чему храповое колесо перемещает тело удерживающей собачки в направлении к датчику в ответ на натяжение, по меньшей мере частично возникшее в создающей силу цепи во время по меньшей мере частичного включения ручного тормоза, и позиционирует мишень датчика в оперативном определяющем совмещении с датчиком, и
(t) благодаря чему поджимающее средство перемещает удерживающую собачку в противоположном направлении к храповому колесу во время выключения ручного тормоза, заставляя мишень датчика выйти из оперативного определяющего совмещения с датчиком.
2. Устройство по п. 1, в котором датчик электрически соединен с системой управления и выполнен с возможностью генерировать управляющий сигнал в ответ на определение или не определение участка дистального конца мишени датчика.
3. Устройство по п. 1, в котором датчик установлен на внешней поверхности корпуса и в котором устройство далее содержит отверстие, проходящее сквозь толщину корпуса в таком положении, чтобы мишень датчика проходила сквозь это отверстие для позиционирования в оперативном определяющем совмещении с датчиком.
4. Устройство по п. 3, дополнительно содержащее пустотелый корпус датчика, расположенный на внешней поверхности корпуса и прикрепленный к ней, при этом пустотелый корпус датчика имеет первый открытый конец, по существу совмещенный с отверстием, проходящим сквозь его толщину, противоположный второй открытый конец и перегородку, расположенную внутри пустотелого корпуса датчика между этими открытыми концами, при этом сквозь толщину перегородки проходит отверстие, причем датчик проходит сквозь это отверстие в перегородке и прикреплен к ней парой резьбовых крепежных элементов в форме гаек.
5. Устройство по п. 1, в котором мишень датчика сформирована как одно целое с удерживающей собачкой как единый элемент.
6. Устройство по п. 1, далее содержащее фланец, расположенный на внешней поверхности тела удерживающей собачки и прикрепленный к ней, при этом сквозь толщину фланца проходит отверстие, причем мишень датчика проходит сквозь отверстие, проходящее сквозь фланец, и прикреплено к нему парой резьбовых крепежных элементов в форме гаек.
7. Железнодорожный ручной тормоз, содержащий:
(a) по существу пустотелый корпус;
(b) создающую силу цепь, отходящую от корпуса и выполненную с возможностью соединения одним своим концом с рычажной тормозной системой железнодорожного вагона;
(c) цепной барабан, с помощью которого цепь может либо выбираться для по меньшей мере частичного включения ручного тормоза при вращении в одном направлении или отпускаться для выключения ручного тормоза при вращении в противоположном направлении, при этом цепной барабан расположен внутри корпуса;
(d) механизм натяжения и отпускания цепи, содержащий:
i. приводимый вручную приводной механизм, соединенный с цепным барабаном и выполненный с возможностью вращения в одном направлении или в противоположном направлении для привода во вращение цепного барабана в этом одном или противоположном направлении соответственно, при этом приводной механизм содержит приводной вал, имеющий резьбовой участок, маховик, установленный снаружи корпуса, и шестерню, расположенную внутри корпуса и закрепленную на противоположном конце приводного вала для вращения вместе с ним при вращении маховика;
ii. механизм захвата и освобождения, расположенный внутри корпуса и соединенный для взаимодействия с приводным средством и выполненный с возможностью при его вращении в одном направлении и при нарастании натяжения цепи во время ее выбирания для включения тормозов железнодорожного вагона переходить в положение зацепления, в котором вращение приводного средства в противоположном направлении заблокировано, и тем самым удерживать тормоза железнодорожного вагона во включенном состоянии вплоть до выключения, при этом механизм захвата и освобождения содержит храповое колесо, выполненное с возможностью вращения вместе с приводным средством, после окончания приложения ручного усилия к приводному средству для удержания приводного средства и тормозов железнодорожного вагона в состоянии равновесия, при этом механизм захвата и освобождения также содержит гайку для зажима средства храпового колеса во время включения тормоза, обойму муфты, находящуюся в зацеплении с возможностью вращения с шестерней, кольцевой стационарный кулачок, окружающий приводной вал и расположенный соосно с ним рядом с тем его концом, на котором закреплена шестерня, кольцевой подвижный кулачок, расположенный соосно со стационарным кулачком и окружающий его и соединенный с ним ответной резьбой с мелким шагом, частично сформированной на стационарном кулачке и частично сформированной на подвижном кулачке, и
iii. удерживающую собачку, тело которой установлено для вращения в корпусе и которая имеет входящий в зацепление с храповиком участок, отходящий от тела и оперативно взаимодействующий с храповым колесом;
(e) удлиненное отверстие, выполненное в теле удерживающей собачки так, чтобы удерживающая собачка была установлена с возможностью по существу линейного возвратно-поступательного перемещения в направлении, по существу поперечном оси вращения удерживающей собачки;
(f) фланец, расположенный на внешней поверхности тела удерживающей собачки и прикрепленный к ней, при этом фланец имеет отверстие, проходящее сквозь его толщину;
(g) мишень датчика, проходящая сквозь отверстие во фланце, при этом мишень датчика проходит в направлении, по существу противоположном направлению входящего в зацепление с храповым колесом участка удерживающей собачки, при этом мишень датчика расположена для по существу линейного возвратно-поступательного движения вместе с телом;
(h) отверстие, проходящее сквозь толщину корпуса в таком положении, чтобы сквозь это отверстие проходила мишень датчика;
(i) пустотелый корпус датчика, расположенный на внешней поверхности корпуса и прикрепленный к нему, при этом пустотелый корпус датчика содержит первый открытый конец, по существу совмещенный с отверстием, проходящим сквозь толщину корпуса, противоположный второй открытый конец, перегородку, расположенную внутри пустотелого корпуса датчика между его открытыми концами, при этом сквозь толщину перегородки проходит отверстие;
(j) датчик, проходящий сквозь отверстие в перегородке и закрепленный на ней парой резьбовых крепежных элементов в форме гаек;
(k) соединитель, прикрепленный к пустотелому корпусу датчика и оперативно соединенный с датчиком;
(l) поджимающее средство, вставленное между внутренней поверхностью корпуса и внешней поверхностью тела удерживающей собачки;
(m) благодаря чему тело удерживающей собачки движется в направлении к датчику во время по меньшей мере частичного включения ручного тормоза в ответ на натяжение создающей силу цепи, заставляя мишень датчика переместиться в оперативное определяющее совмещение с датчиком; и
(n) благодаря чему поджимающее средство поджимает тело удерживающей собачки к храповому колесу во время выключения ручного тормоза, заставляя мишень датчика выйти из оперативного определяющего совмещения с датчиком.
8. Устройство для определения натяжения, по меньшей мере частично появившегося в создающем силу элементе, содержащее:
(a) механизм, соединенный с создающим силу элементом и выполненный с возможностью создавать возвратно-поступательное движение создающего силу элемента, при этом механизм имеет храповое колесо, установленное с возможностью вращения;
(b) по меньшей мере одну собачку, установленную с возможностью вращения и имеющую участок, находящийся в оперативном зацеплении с храповым колесом, при этом эта по меньшей мере одна собачка выполнена с возможностью перемещения между первым положением, в котором храповое колесо может вращаться в одном направлении, и вторым положением, в котором храповое колесо может вращаться в противоположном направлении, при этом по меньшей мере одна собачка содержит удлиненное отверстие так, что по меньшей мере одна собачка установлена для по существу линейного движения по существу поперек ее оси вращения; и
(c) датчик, установленный для определения по меньшей мере одного из этих первого и второго положений этой по меньшей мере одной собачки.
9. Устройство по п. 8, дополнительно содержащее мишень датчика, установленную на этой по меньшей мере одной собачке и прикрепленную к ней, причем датчик установлен для определения этой мишени датчика.
10. Устройство по п. 8, в котором механизм содержит муфту, установленную с возможностью вращения, углубление, выполненное в муфте, причем по меньшей мере одна собачка имеет другой участок, находящийся в оперативном зацеплении с углублением.
| US 6364069 B1, 02.04.2002 | |||
| EP 1264751 A3, 05.03.2003 | |||
| US 4368648 A, 18.01.1983 | |||
| АВТОМАТИЧЕСКИЙ СТОЯНОЧНЫЙ ТОРМОЗ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА | 1996 |
|
RU2129502C1 |
| СПОСОБ ПРОВЕРКИ ТОРМОЗНОЙ ЭФФЕКТИВНОСТИ СТОЯНОЧНОГО ТОРМОЗА ЖЕЛЕЗНОДОРОЖНОГО ГРУЗОВОГО ВАГОНА | 1996 |
|
RU2111140C1 |

