ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится, в общем, к обработке жидкой среды и главным образом к измерениям технологического потока и управлению им. В частности, изобретение относится к способам измерения для электромагнитных расходомеров.
Электромагнитные расходомеры (или магнитные расходомеры) измеряют расход с помощью закона индукции Фарадея, электромагнитного эффекта. Расходомер возбуждает катушку для создания магнитного поля поперек участка трубопровода, и магнитное поле индуцирует электродвижущую силу (ЭДС) поперек технологического потока. Полученная в результате разность потенциалов (или напряжение) измеряют с применением пары электродов, которые проходят через участок трубопровода и в технологический поток, или через емкостную связь. Скорость потока является пропорциональной индуцированной ЭДС, и объемный расход является пропорциональным скорости потока и проходному сечению.
В общем случае электромагнитные способы измерения расхода являются применимыми к жидкостям на водной основе, ионным растворам и другим электропроводящим потокам. Особые применения включают водоочистные сооружения, фармацевтическое производство с высокой степенью очистки, здоровую пищу и производство напитков и химическое обогащение, включая опасные и коррозионные технологические потоки. Электромагнитные расходомеры также применяют в углеводородной топливной промышленности, включая способы гидравлического разрыва пласта с применением абразива и агрессивных шламов, и в другой добыче углеводородных топлив и способах очистки и обработки.
Электромагнитные расходомеры обеспечивают быстрые, точные измерения расхода в применениях, где дифференциальные способы на основе давления являются неблагоприятными из-за сопутствующего перепада давления (например, поперек измерительной диафрагмы расходомера или расходомера Вентури). Магнитные расходомеры могут также быть применены в условиях, когда тяжело или непрактично вводить механический элемент, такой как ротор турбины, вихревой элемент с телом обтекания или трубку Пито в технологический поток.
Среди этих применений существует постоянная потребность в улучшенном способе магнитного измерения расхода. В частности, существует потребность в уменьшенном смещении измерения расхода в высокоточных применениях при условии обработки шумовых эффектов, включая электронный, механический и электромагнитный вносимый шум.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к устройству для измерения расхода и способу для применения устройства. Устройство содержит участок трубопровода для технологического потока, катушку для создания магнитного поля поперек участка трубопровода, источник тока для возбуждения катушки и электрод для обнаружения электродвижущей силы, индуцированной поперек технологического потока с помощью магнитного поля.
Источник тока возбуждает катушку на множестве различных частот импульсов. Процессор вычисляет функцию электродвижущей силы во множестве различных частот импульсов и создает значение расхода, основанное на функции.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
На фиг. 1 представлен схематический вид сбоку электромагнитного расходомера с навесным передатчиком согласно варианту осуществления с фланцевым соединением.
На фиг. 2 представлен схематический вид сзади электромагнитного расходомера с выносным передатчиком согласно варианту осуществления пластинчатого типа.
На фиг. 3 представлена электрическая монтажная схема для электромагнитного расходомера с источником импульсного тока изменяемой частоты.
На фиг. 4 представлен график сигнала импульсного тока изменяемой частоты.
На фиг. 5 представлена блок-схема, на которой изображен способ для измерения расхода электромагнитным расходомером с изменяемой частотой.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
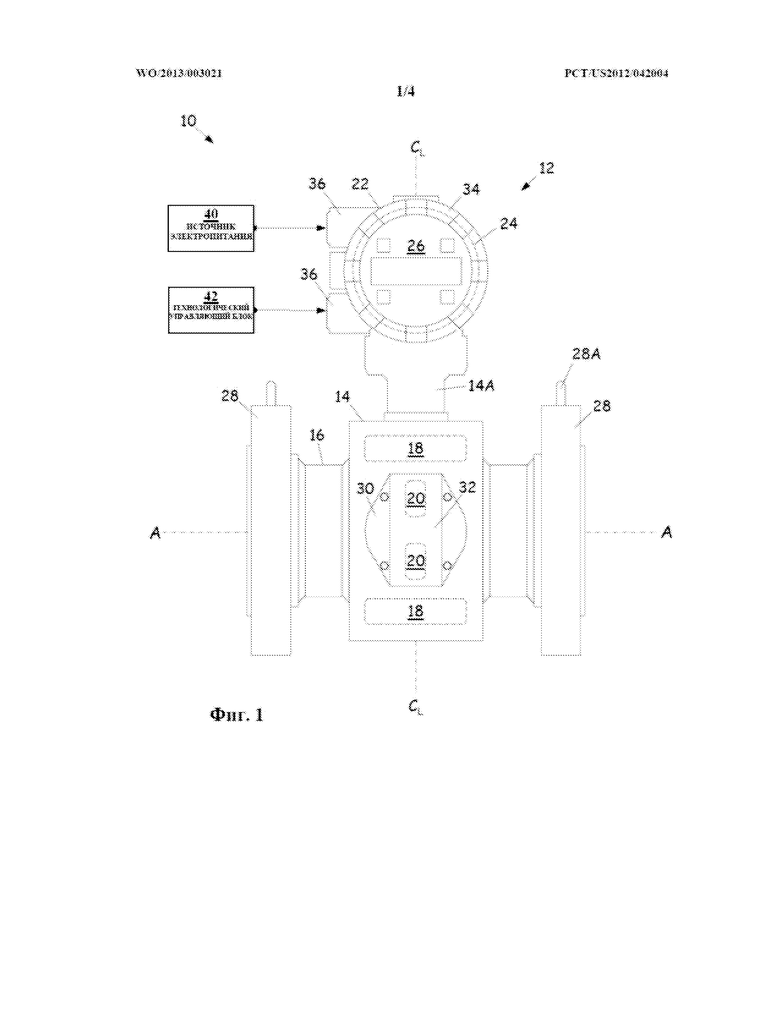
На фиг. 1 представлен схематический вид сбоку одного варианта осуществления электромагнитного расходомера 10 во фланцевом размещении с навесным передатчиком 12. Расходомер 10 содержит корпус 14 датчиков и участок 16 трубопровода с катушками 18 и электродами 20 (показанными пунктирными линиями), расположенными в корпусе 14 датчиков. Передатчик 12 содержит корпус 22 передатчика с электронной платой (или контроллером) 24 (также показаны пунктирными линиями) и локальный пульт 26 управления (LOI). Контроллер 24 создает импульсный ток возбуждения с изменяемой частотой для катушек 18, улучшая производительность и уменьшая сигнал смещения в условиях технологического шума, как описано ниже.
В навесном варианте осуществления по фиг. 1 передатчик 12 крепится непосредственно на соединительной части 14A корпуса 14 датчиков с прямыми внутренними соединениями между контроллером 24, катушками 18 и электродами 20. В соответствии с другим вариантом выносной передатчик 12 и соединения являются внешними, как показано на фиг. 2.
Корпус 14 датчиков выполнен из прочного магнитного металла, такого как углеродистая сталь, для того, чтобы оградить катушки 18 и электроды 20 от внешних полей и возмущений, которые могут повлиять на измерения расхода. Корпус 14 датчиков также защищает от загрязнения грязью, нефтью и водой, замедляет проникновение взрывчатых и коррозионных веществ и предотвращает физический контакт с другими источниками опасности в среде промышленной обработки.
Участок 16 трубопровода имеет переменную длину трубы или трубопровод технологического потока с внутренним диаметром (ID) в диапазоне от половины дюйма (12,7 мм) или менее до двенадцати дюймов (30 см) или более. Участок 16 трубопровода обычно выполнен из немагнитного металла, такого как нержавеющая сталь, для того чтобы пропускать линии магнитной индукции, создаваемые с помощью катушки 18 поперек технологического потока.
В варианте осуществления с фланцевым соединением по фиг. 1 участок 16 трубопровода содержит фланцы 28 со сквозными отверстиями для установки электромагнитного расходомера 10 в звене трубопровода или другой структуре потока с выступами 28A для поддержки расходомера 10 во время транспортировки и установки. В зависимости от вариантов осуществления фланцы 28 могут быть выполнены из материала на основе нержавеющей стали, например, как применялось для участка 16 трубопровода, или материала на основе углеродистой стали, как применялось для корпуса 14 датчиков. В соответствии с другим вариантом любой из следующего: корпус 14 датчиков, участок 16 трубопровода и фланцы 28, могут быть выполнены из углеродистой стали, нержавеющей стали, алюминия, меди, латуни или другого метала или металлического сплава или из прочного полимера или термопластичного материала, такого как ПВХ (поливинилхлорид) или АБС (акрилонитрил-бутадиен-стирол).
Катушки 18 и электроды 20 расположены внутри корпуса 14 датчиков. Катушки 18 содержат намотанную медную проволоку или другие проводящие обмотки, которые направлены вокруг внешнего диаметра (OD) участка 16 трубопровода для создания магнитного поля поперек технологического потока. В некоторых вариантах осуществления катушки 18 включают магнитно-мягкий сердечник и компоненты замыкания магнитного потока для увеличения силы поля и однородности или для формирования линий поля и уменьшения отклонения силовых линий снаружи корпуса 14 датчиков.
Электроды 20 проходят через участок 16 трубопровода для обнаружения разности потенциалов (или ЭДС), индуцированных поперек технологического потока, либо с помощью непосредственного электрического соединения, либо емкостной связи. В зависимости от варианта осуществления крышка 30 электродов для доступа к электродам 20 может быть обеспечена шильдиком 32, чтобы определить расходомер по производителю, модели или серийному номеру. Как показано на фиг. 1, электроды 20 могут также быть «устанавливаемыми» или вращаемыми вокруг оси A, так что плоскость электрода ориентирована под углом наклона до 45 градусов по отношению к средней линии CL.
Корпус 22 передатчика содержит переднюю крышку 34 для электронной платы 24 и локальный пульт 26 управления и соединение 36 трубопровода для соединения передатчика 12 с источником 40 электропитания (PS) и технологическим управляющим блоком 42 (PCU). Источник 40 электропитания включает источник питания переменного тока (сеть), или источник питания постоянного тока, или оба. Технологический управляющий блок 42 содержит дистанционный коммуникатор, удаленного оператора или систему управления технологическим процессом, которая применяет выходное значение из электромагнитного расходомера 10 для мониторинга или управления переменными технологического процесса, включая, но без ограничения, скорость потока через участок 16 трубопровода.
В двухпроводных вариантах осуществления передатчик 12 вмещает спектр различных коммуникационных протоколов, включая, но без ограничения, стандартные аналоговые (4-20 мА) сигналы, гибридные аналого-цифровые протоколы, такие как HART®, и цифровое измерение и структуры системы управления, включая шину FoundationTM Fieldbus, PROFI®BUS/PROFI®NET и Plantweb®. В соответствии с другим вариантом передатчик 12 применяет комбинацию витков проволоки, кабелей, шин управления и линий передачи или беспроводного интерфейса для радиочастотной (RF), инфракрасной (IR) или оптической связи. В этих и других вариантах осуществления подходящие передатчики 12 и электромагнитные расходомеры 10 доступны из Rosemount Inc. г. Иден-Прери, штат Миннесота, компании Emerson Process Management с улучшениями, как описано в данном документе.
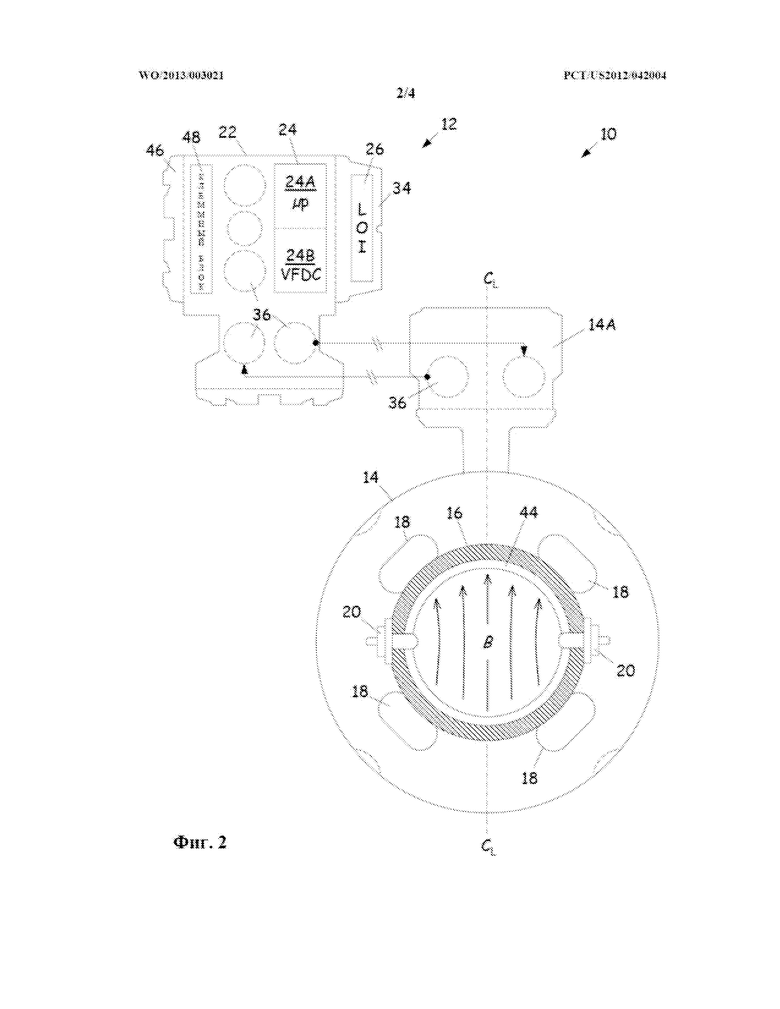
На фиг. 2 представлен схематический вид сзади электромагнитного расходомера 10 в (бесфланцевом) размещении пластинчатого типа с выносным передатчиком 12. В зависимости от варианта осуществления электромагнитный расходомер 10 также применяет дополнительные монтажные конструкции, включая, но без ограничения, центровочные кольца, прессуемую арматуру с резьбой и внешние элементы соединения накладными фланцами.
В закрытых установках, где существует недостаток пространства рядом с участком 16 трубопровода, выносная конфигурация по фиг. 2 позволяет передатчику 12 быть размещенным рядом с технологической конструкцией, такой как балка, стена или перегородка, или на другом напорном трубопроводе или трубопроводе. В соответствии с другим вариантом передатчик 12 может быть расположен на расстоянии до 1000 футов (приблизительно 240 м) или более от корпуса 14 датчиков, например, для более централизованного или доступного размещения передатчика или чтобы разместить передатчик 12 к комнате управления снаружи производственной среды.
Чтобы охватить каждый из этих вариантов осуществления, термин «расходомер», как применяется в данном документе, может включать не только участок 16 трубопровода, корпус 14 датчиков и его внутренние компоненты, но также передатчик 12 и его компоненты. В частности, «расходомер» может охватывать и внутренний и выносной варианты осуществления передатчика 12 независимо от длины соединения между передатчиком 12 и корпусом 14 датчиков и независимо от конкретной формы, в которой выполнены соединения.
На виде сзади по фиг. 2 участок 16 трубопровода (показанный с поперечной штриховкой) проходит в осевом направлении через корпус 14 датчиков, и корпус 14 датчиков формирует кольцевую оболочку вокруг участка 16 трубопровода, катушек 18 и электродов 20. Магнитное поле B направлено поперечно через участок 16 трубопровода, по существу перпендикулярно технологическому потоку.
Внутреннее покрытие 44 выполнено из немагнитного электроизоляционного материала, который покрывает внутренний диаметр участка 16 трубопровода для создания электрического, химического и механического барьера между участком 16 трубопровода и технологическим потоком. В частности, внутреннее покрытие 44 изолирует участок 16 трубопровода от технологической жидкой среды и защищает от эрозии и коррозии из-за химических и абразивных веществ в технологическом потоке. В некоторых вариантах осуществления внутреннее покрытие 44 состоит из материала на основе PFA (перфторалкоксил), такого как Teflon®, Teflon®-PFA или Tefzel®-PFA, PPS (сульфида полифенилена) материала, такого как Ryton® PPS, или другого полимера, такого как Neoprene, полиуретан или натуральный каучук, доступных от коммерческих поставщиков, включая Rosemount Inc.
Катушки 18 направлены над внешним диаметром участка 16 трубопровода и выполнены с возможностью создания магнитного поля B поперек технологического потока. Электроды 20 проходят от OD участка 16 трубопровода через внутреннее покрытие 44 на ID участке 16 трубопровода, создавая электрическое соединение с технологическим потоком для того, чтобы обнаружить ЭДС, индуцированную с помощью магнитного поля B. В соответствии с другим вариантом электроды 20 создают емкостную связь с технологическим потоком, как описано выше. В дополнение плоскость электродов 20 может быть либо перпендикулярной средней линии CL, как показано на фиг. 2, либо электроды 20 могут быть установлены под косым углом вплоть до 45°, как показано на фиг. 1.
Передатчик 12 содержит корпус 22 передатчика с передней крышкой (электроники) 34 для электронной платы 24 и локального интерфейса 26 пользователя и задней (клеммная) крышкой 46 для одного или нескольких клеммных блоков 48. Корпус 22 передатчика также обеспечивает дополнительные трубопроводные соединения 36 для соединения передатчика 12 с соединительной частью 14A корпуса 14 датчиков.
Электронная плата (или контроллер) 24 содержит процессор или микропроцессор 24A (μp), и источник 24B тока переменной частоты (VFDC). Процессор 24A содержит интерфейс для соединения с системой управления технологическим процессом или удаленным оператором и для связи выхода, представляющего расход через участок 16 трубопровода.
Локальный пульт 26 управления содержит интерактивное устройство отображения для локального управления и связи с передатчиком 12. В некоторых вариантах осуществления локальный пульт 26 управления содержит кнопки навигации, основанные на меню, для доступа к установочной информации и параметрам конфигурации, запуску тестовых режимов и доступа к другим функциям передатчика.
Клеммный блок 48 выполнен из прочного пластика или другого электроизоляционного материала с электрическими соединениями для питания и входной/выходной (I/O) канал с системой управления технологическим процессом, как показано на фиг. 1. В зависимости от варианта осуществления один или несколько клеммных блоков 48 могут также быть обеспечены для создания соединения с катушкой 18 и электродами 20 в корпусе 14 датчиков, как показано на фиг. 3.
Отдельные компоненты контроллера 24, локальный пульт 26 управления и клеммный блок 28, могут быть выполнены в виде отдельных электронных плат или элементов схемы, как показано на фиг. 2, или во встроенном блоке электронного оборудования или секции. В дополнение, контроллер 24 может также быть выполнен с возможностью переключения между внутренним и внешним источниками электропитания для источника 24B тока переменной частоты. В некоторых из этих вариантов осуществления электромагнитный расходомер 10 применяет внешний источник 40 электропитания, как показано на фиг. 1, который обеспечивает переменный или постоянный ток, который меняет направление, является импульсным или модулированным источником 24B тока переменной частоты.
В каждом из этих вариантов осуществления источник 24B тока переменной частоты обеспечивает импульсный ток возбуждения катушке 18 и ток является импульсным на множестве различных частот. Электроды 20 обнаруживают ЭДС, индуцированную поперек технологического потока, и процессор 24A рассчитывает значение расхода, основанное на функции ЭДС на множестве различных частот импульсов. В общем случае функция содержит среднюю, средневзвешенную или другую усредняющую функцию сигналов ЭДС как индуцированных на каждой из различных частот импульсов, для того чтобы уменьшить сигнал смещения из-за шумовых эффектов, как описано ниже.
Более конкретно, катушки 18 выполнены с возможностью создания по существу однородного магнитного поля B внутри участка 16 трубопровода. Линии магнитной индукции направлены поперек участка 16 трубопровода и внутреннего покрытия 44, как показано на фиг. 2, пересекая технологический поток по существу перпендикулярно или в направлении нормали (т.е., приблизительно под 90°). В относительно широком рабочем диапазоне напряженность поля (или магнитная индукция) приблизительно пропорциональна току возбуждения, который включает и выключает поле, когда катушки 18 генерируют импульсы с помощью источника 24B тока переменной частоты.
При проведении расхода технологической жидкой среды через магнитное поле B поперек электродов 20 образуется замкнутый контур Фарадея. Электроды 20 обнаруживают индуцированную ЭДС (или ЭДС самоиндукции) поперек участка 16 трубопровода, где индуцированная ЭДС является по существу пропорциональной скорости потока и напряженности магнитного поля.
В математической форме индуцированный потенциал E пропорционален средней скорости потока V, средней напряженности B магнитного поля и внутреннему диаметру D протока, определяемому внутренним покрытием 44:

«Коэффициент k» (k) является постоянной пропорциональности, которая зависит от единиц, в которых измеряются E, V, B и D.
Инвертируя уравнение 1, скорость потока V дается как функция индуцированного потенциала E, напряженности B магнитного поля и диаметра D протока:

Объемный расход, в свою очередь, является средней скоростью потока, умноженной на проходное сечение.
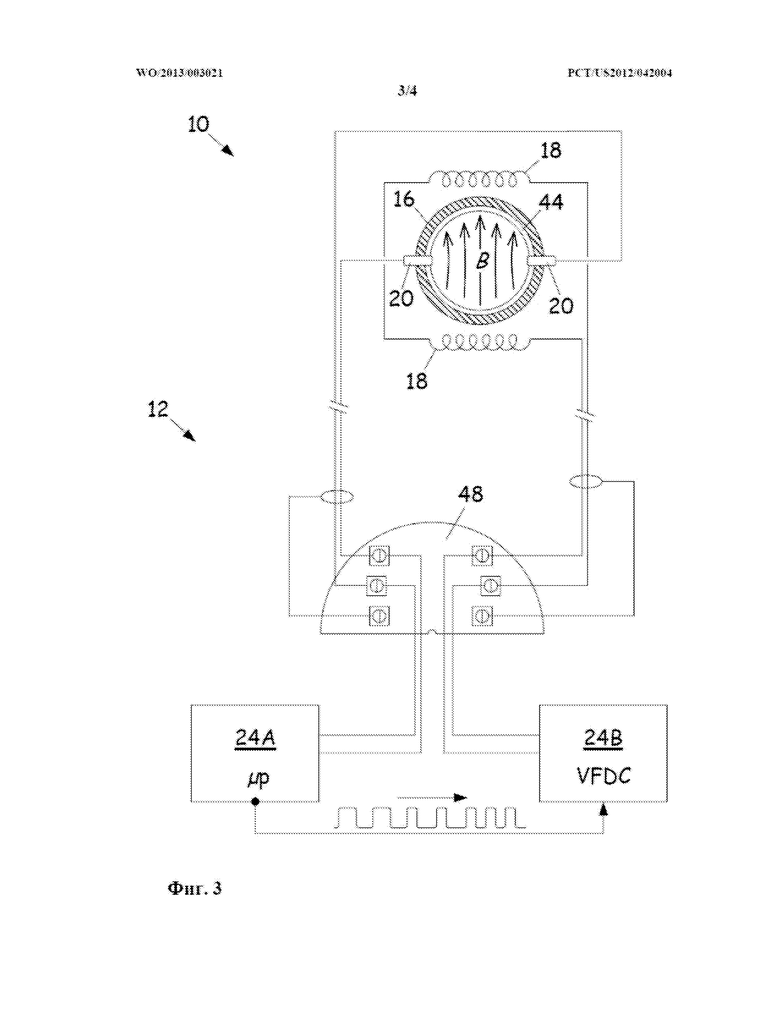
На фиг. 3 представлена схематическая монтажная схема для электромагнитного расходомера 10. В этом варианте осуществления электроды 20 проходят через участок 16 трубопровода и внутреннее покрытие 44 для обнаружения ЭДС, индуцированной с помощью потока технологической жидкой среды поперек магнитного поля B, как описано выше. Клеммный блок 48 соединяет процессор 24A с электродами 20 и источник 24B с катушками 18.
Чтобы увеличить точность, электромагнитный расходомер 10 сконфигурирован для работы на импульсном DC (постоянном токе). В этом режиме процессор 24A сравнивает сигнал индуцированной ЭДС с электродов 20 на максимуме (пике) и минимуме (около нуля) магнитного поля, для того чтобы выполнить поправку на отклонение и дрейф нуля. Измерения на основе импульсного DC также уменьшают эффекты электролитических реакций между технологической текучей средой и электродами 20, емкостных связей с катушками 18, сдвига фазы, основанным на сопротивлении, и вкладов в сдвиг по фазе на 90°, включая индуктивную связь между магнитным полем и технологической жидкой средой или сигнальными линиями электродов.
Источник 24B тока переменной частоты также изменяет импульсную частоту тока для уменьшения шумовых эффектов технологического процесса. В некоторых вариантах осуществления процессор 24A синхронизирует источник 24B тока для модулирования частоты импульсов или коэффициента заполнения, как показано на фиг. 3. В соответствии с другим вариантом источник 24B тока содержит внутренние компоненты электрической цепи импульсной модуляции или вентильный элемент или генератор синхроимпульсов для синхронизации внешнего источника тока, как описано выше.
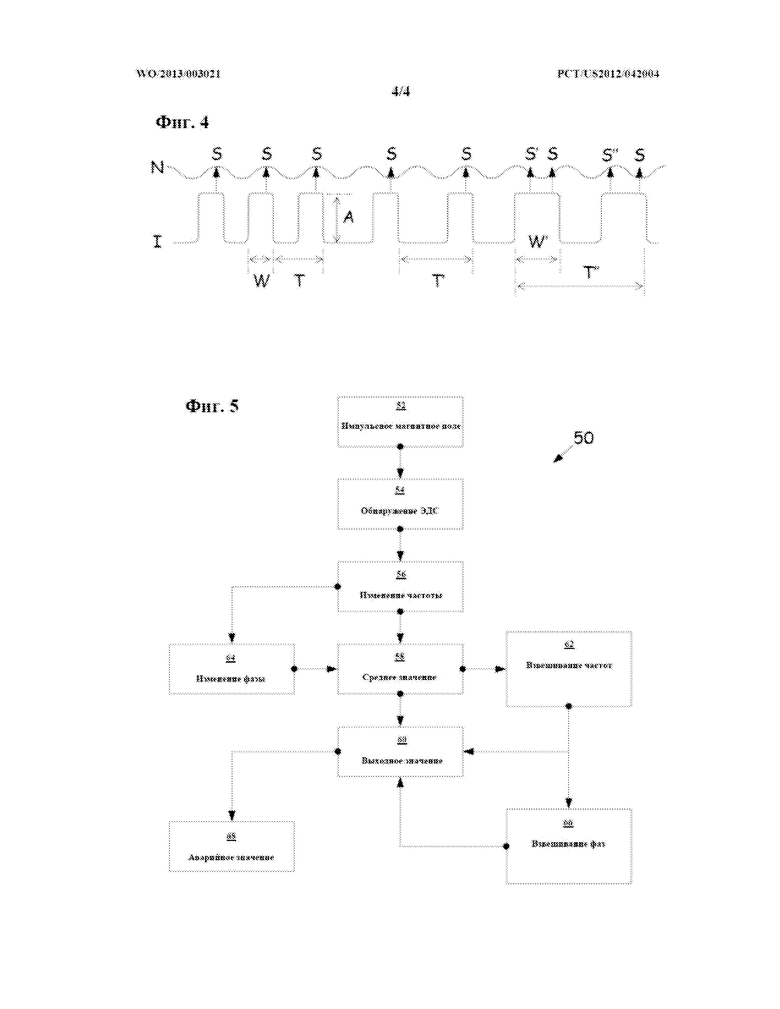
На фиг. 4 представлен график сигнала I импульсного тока изменяемой частоты с одновременным сигналом N шума технологического процесса. Каждый импульс тока определяется с помощью амплитуды A импульса, ширины W (или W') импульса и периода T (или T', T'') импульса. Период T импульсов определяет частоту (f=1/T) импульсов, и коэффициент заполнения предоставляется отношением ширины W импульса к периоду T импульсов (то есть коэффициент заполнения=W/T или, эквивалентно, коэффициент заполнения=Wf).
Амплитуда A импульса тока зависит от сопротивления катушки и входного напряжения, которое обычно находится в диапазоне от 10 до 40 В или более. В некоторых вариантах осуществления импульс тока I является строго сигналом DC (постоянного тока) и ток катушки и магнитное поле имеют по существу постоянную (импульсную) полярность. В других вариантах осуществления применяется источник AC (переменного тока) или электроника вводит сдвиг или смещение для создания импульсного сигнала AC в катушках 18. В этих вариантах осуществления как ток катушки, так и магнитное поле могут периодически изменять направление.
Шумовой сигнал N получается в результате некоторых различных факторов. Это включает электронную пульсацию и утечку напряжения на линии и других AC сигналов и давление или пульсацию потока из насосов, компрессоров, турбин и другого роторного оборудования. Шумовые сигналы N также получаются в результате механических вибраций в участке трубопроводов и других технологических конструкциях либо независимо, или в сочетании с другими источниками.
В определенном варианте осуществления по фиг. 4 первый набор импульсов тока имеет приблизительно постоянную ширину W импульса и период T с частотой f, соответствующей доминирующему шумовому сигналу. Индуцированная ЭДС измеряется в фазе S дискретизации, которая определяется на поимпульсной основе как доля периода T импульсов. В общем случае фаза S дискретизации выбирается вблизи конца каждого импульса тока, после того как магнитное поле устанавливается по существу на максимальном значении.
Когда шумовой сигнал N совпадает с частотой дискретизации, измерение расхода подвергается воздействию смещения, так как каждая выборка «считывает» ту же фазу шумового сигнала, приводя к постоянному сдвигу в сторону более высоких или более низких значений. Эффект является похожим, когда частота шума и дискретизации находятся в гармоническом взаимодействии, в частности, для первой, третьей и других нечетных гармоник, которые доминируют в преобразовании Фурье по существу прямоугольных импульсных сигналов I тока. Эффекты смещения могут также иметь место в негармонических дискретизациях и шумовых частотах, однако, из-за создания пульсации и других интерференционных эффектов.
Независимо от конкретной формы шумового сигнала N соответственно дискретизация с постоянной частотой может в общем случае вводить смещение в измерение расхода. В частности, смещение может быть введено, когда насосы и другое турбинное оборудование периодически включается и выключается, или когда определенная частота шума сдвигается по частоте дискретизации (или ее гармонике). Мощное механическое оборудование может также создавать шум даже без непосредственного взаимодействия потоков, например, с помощью индицирования механических вибраций в напорных трубопроводах и других технологических конструкциях или посредством утечки на линии электропитания.
Чтобы уменьшить эти эффекты, частота импульсов тока катушки изменяется, как показано на фиг. 4. В частности, ширина W импульса и период T импульсов являются независимо изменяемыми для того, чтобы увеличить или уменьшить частоту импульсов либо при фиксированной ширине или фиксированном коэффициенте заполнения или чтобы изменять как ширину импульса, так и коэффициент заполнения как функцию частоты. В результате фаза S дискретизации смещена по отношению к шумовому сигналу N, уменьшая смещение с помощью шума дискретизации в диапазоне различных фаз и соответствующих амплитуд.
В конкретном примере по фиг. 4 индуктивность катушки является относительно низкой и импульс тока имеет длинный «плоский» или горизонтальный участок поперек большей части ширины W импульса. В этом случае также возможным является изменение фазы S дискретизации независимо от периода T импульсов. В других конфигурациях, в частности, для больших диаметров трубы время установления может быть большим, и горизонтальный участок может быть относительно уже, требуя увеличения ширины W импульса.
На фиг. 5 представлена блок-схема, иллюстрирующая способ 50 для измерения расхода с электромагнитным расходомером с изменяемой частотой. Способ 50 включает создание (этап 52) импульсного магнитного поля поперек технологического потока, обнаружение (этап 54) электродвижущей силы, индуцированной с помощью магнитного поля, изменение (этап 56) частоты импульсного магнитного поля, вычисление (этап 58) среднего значения функции ЭДС на множестве различных частот и вывод (этап 60) измерения расхода, основанного на среднем значении.
В некоторых вариантах осуществления способ 50 также содержит взвешивание (этап 62) частоты для создания средневзвешенного значения, например для исключения одной или нескольких частот, которые подвержены шумоиндуцированному смещению. В других вариантах осуществления способ 50 включает изменение фазы (этап 64) дискретизации и взвешивание (этап 66) фазы для создания средневзвешенного значения. В дополнительных вариантах осуществления способ 50 включает создание (этап 68) аварийного значения, основанного на отклонении или разнице ЭДС при конкретной частоте или фазе по сравнению со средним значением или усредненным значением.
Создание (этап 52) импульсного поля включает возбуждение катушки или другого источника поля для создания импульсного магнитного поля поперек технологического потока. Характеристики поля определяются амплитудой импульса тока, шириной импульса и частотой импульсов, как описано выше для фиг. 4.
Обнаружение (этап 54) электродвижущей силы включает обнаружение напряжения или разности потенциалов, индуцированных с помощью магнитного поля, например, с применением пары электродов, размещенных поперек покрытого напорного трубопровода (фиг. 2). Разность потенциалов (которая является индуцированной ЭДС) изменяется с напряженностью магнитного поля и средней скоростью потока, обычно по существу по линейному закону.
Изменение частоты импульсного магнитного поля (этап 56) включает изменение частоты источника тока возбуждения для создания множества различных частот импульсов. Форма импульсов магнитного поля и частота импульсов обусловлены импульсом тока в зависимости от дополнительных параметров, таких как индуктивность катушки и строение расходомера, как описано выше.
В некоторых вариантах осуществления частота импульсов изменяется с помощью изменения периода импульсов независимо от ширины импульса и коэффициент заполнения увеличивается или уменьшается соответственно. В других вариантах осуществления ширина импульса также изменяется, а частота импульсов и коэффициент заполнения являются независимыми.
В типичных вариантах осуществления создаются по меньшей мере три различные частоты импульсов. В общем случае дискретизация частоты расположена таким образом, чтобы гармоники не перекрывались или чтобы один ряд гармоник не перекрывался другими. Это дополнительно уменьшает смещение с помощью избегания дискретизации повторяющихся гармоник шумового сигнала.
Вычисление (этап 58) среднего значения включает определение усредняющей функции электродвижущей силы на множестве различных частот импульсов. В некоторых вариантах осуществления усредняющая функция содержит обычное (или невзвешенное) среднее значение электродвижущей силы для каждой из различных частот, при этом каждый фактор обладает одинаковым весом. В других вариантах осуществления усредняющая функция содержит взвешенное среднее значение или средневзвешенное значение, основанное на различных факторах частот и фаз, как описано ниже. В дополнительных вариантах осуществления усредняющая функция содержит факторы из различных периодов дискретизации, например скользящее среднее, взятое за два, три или более последовательных периодов дискретизации или средневзвешенное по времени значение, в котором факторы взвешивания основываются на относительном времени дискретизации.
Создание (этап 60) выходного значения включает создание выходного сигнала, представляющего расход технологического потока, основанный на усредняющей функции. В частности, выходное значение основано на среднем, усредненном или средневзвешенном значении электродвижущей силы на множестве различных частот импульсов, а не на отдельной частоте импульсов.
Взвешивание (этап 62) частот включает сравнение индуцированной ЭДС на каждой частоте импульсов с обычным средним значением, определяя разницу между обычным средним значением и ЭДС для каждого импульса частоты и взвешивание усредненного значения, основанного на разнице. Разница определяется по-разному: как абсолютное или относительное (процентное) отклонение от среднего значения, или с помощью статистической характеристики, такой как z-оценка, основанной на стандартном отклонении, или вероятности, или правдоподобии, основанном на отклонении или z-оценке.
В одном варианте осуществления взвешивание является либо нулевым, либо единичным. Это является, по сути, способом выбора или запрета, в которых ЭДС значениям, в частности, из диапазона среднего значения, равномерно присваиваются значения единицы, и тем значениям, которые находятся вне диапазона, присваиваются значения нуля. Значения нулевого веса являются, таким образом, «запрещенными» или исключенными из значения расхода, в то время как значения единичного веса являются включенными.
В некоторых из этих вариантов осуществления конкретные частоты являются запрещенными или исключенными, когда соответствующие ЭДС отличаются от значения на более чем номинальная точность расходомера. Для высокоточных применений номинальная точность может составлять 1% или менее, например, около 0,2%. В других вариантах осуществления конкретные частоты являются запрещенными или исключенными, когда соответствующие ЭДС отличаются от выбранного количества стандартных отклонений от среднего значения, например единицы, двойки или тройки, или когда вероятность или правдоподобие ЭДС (например, основанное на гипотезе случайной дискретизации) является меньшей, чем определенное пороговое значение, например 1%, 5% или 10%.
В дополнительных вариантах осуществления статистический анализ повторяется на сокращенной выборке, для того чтобы подтвердить оставшиеся измерения и исключить любые дополнительные частоты, которые отличаются по существу от нового усредненного значения. В соответствии с другим вариантом применяется непрерывное средневзвешенное значение, где веса определяются правдоподобием или функцией вероятности, как описано выше, с относительными весами между нулем и единицей.
Способ 50 может также содержать обнаружение (этап 64) электродвижущей силы во множестве различных фаз, как показано на фиг. 4. В этих вариантах осуществления вычисление (этап 58) среднего значения содержит вычисление среднего значения ЭДС во множестве различных частот импульсов и множестве различных фаз.
Обнаружение ЭДС в различных фазах дополнительно уменьшает смещение, так как оно создает более полную выборку технологического потока, включая различные фазы и амплитуды компонентов шума. В некоторых вариантах осуществления значение расхода основано на обычном (или невзвешенном) среднем значении ЭДС, как дискретизировано в каждой отдельной фазе. В других вариантах осуществления выходное значение содержит взвешенное (этап 66) среднее значение различных фаз факторов, где веса основаны на разнице или отклонении от усредненного (или обычного значения), как описано выше для взвешивания (этап 62) частоты.
В зависимости от варианта осуществления, следовательно, функция потока может содержать среднее значение ЭДС во множестве различных частот или во множестве различных частот и множестве различных фаз. Значение расхода, в свою очередь, может содержать обычное среднее значение, усредненное значение или средневзвешенное значение, основанное на различных частотах и факторах фаз.
В каждом из этих вариантов осуществления процессор создает уменьшенно-смещенную изменяемую частоту измерения расхода без дополнительной вводимой оператором информации или требований конфигурации и независимо от природы или источника самого шумового сигнала. Когда насос или другой источник шума вводят в технологическую систему, например, усредняющая функция автоматически уменьшает смещение выходного расходомера несмотря на то, опознан ли источник шума или нет. Смещение дополнительно уменьшается с помощью частотного и фазового взвешивания, которые автоматически приспосабливаются к изменениям в спектре шума (например, когда скорость насоса или турбины изменяется), без необходимости совпадения частоты, блокировки фазы и других сложных способов обработки сигналов.
В некоторых вариантах осуществления создается (этап 68) предупреждающее выходное значение или аварийное значение, когда отклонение любого из компонентов частот или фаз превышает определенный порог, основанный на его отличии от обычного среднего значения или усредненного значения. В общем случае аварийный порог может соответствовать запрещенному порогу, как описано выше (например, процентное или сигма-отклонение, или правдоподобие), но аварийный сигнал является независимым от частотного или фазового взвешивания. Таким образом, возможным является создание аварийного значения, основанного на отклонении от определенного фактора частоты или фазы от значения вне зависимости от того, применяется ли отклонение к весу среднего значения, которое применяется при измерении расхода выходного значения.
По мере того как изобретение было описано со ссылкой на примерные варианты осуществления, специалистам в области техники должно быть понято, что различные изменения могут быть выполнены и элементы могут быть заменены их эквивалентами без отступления от объема изобретения. В дополнение модификации могут быть выполнены для адаптации определенных ситуаций или материалов к идеям изобретения без отступления от его основного объема. Следовательно, изобретение не ограничивается определенными вариантами осуществления, раскрытыми в данном документе, но включает все варианты осуществления, попадающие под объем прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦЕЛЬНОФОРМОВАННЫЙ МАГНИТНЫЙ РАСХОДОМЕР | 2013 |
|
RU2604269C2 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ЭЛЕКТРОПРОВОДЯЩЕЙ СРЕДЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2531156C1 |
| УСОВЕРШЕНСТВОВАННАЯ КОНФИГУРАЦИЯ МАГНИТНОГО СЕРДЕЧНИКА ДЛЯ МАГНИТНЫХ РАСХОДОМЕРОВ | 2014 |
|
RU2618753C1 |
| БЕСФЛАНЦЕВЫЙ ВСТАВНОЙ ЭЛЕКТРОМАГНИТНЫЙ РАСХОДОМЕР | 2014 |
|
RU2651631C2 |
| МАГНИТНЫЙ РАСХОДОМЕР С ЭЛЕКТРОДАМИ ИЗ ПОЛИТЕТРАФТОРЭТИЛЕНА | 2014 |
|
RU2659463C2 |
| МАГНИТНЫЙ РАСХОДОМЕР С МНОЖЕСТВЕННЫМИ КАТУШКАМИ | 2013 |
|
RU2615205C2 |
| МАГНИТНЫЙ РАСХОДОМЕР | 2012 |
|
RU2605004C2 |
| СПОСОБ РАБОТЫ УСТРОЙСТВА ИЗМЕРЕНИЯ СКОРОСТИ ПОТОКА СРЕДЫ МАГНИТОИНДУКЦИОННОГО РАСХОДОМЕРА (ВАРИАНТЫ) И МАГНИТОИНДУКЦИОННЫЙ РАСХОДОМЕР | 2009 |
|
RU2410646C2 |
| СИСТЕМЫ И СПОСОБЫ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ ПОДПОВЕРХНОСТНОЙ ПРОВОДИМОСТИ | 2003 |
|
RU2358293C2 |
| СПОСОБ КОНТРОЛЯ ИСПРАВНОСТИ ЭЛЕКТРОМАГНИТНОГО РАСХОДОМЕРА И ЭЛЕКТРОМАГНИТНЫЙ РАСХОДОМЕР С ФУНКЦИЕЙ САМОКОНТРОЛЯ | 2016 |
|
RU2631012C1 |
Настоящее изобретение относится к обработке жидкой среды и главным образом к измерениям технологического потока и управлению им. В частности, изобретение относится к способам измерения для электромагнитных расходомеров. Устройство содержит участок трубопровода для технологического потока, катушку для создания магнитного поля поперек участка трубопровода, источник тока для возбуждения катушки для создания магнитного поля и электрод для обнаружения электродвижущей силы, индуцированной поперек технологического потока с помощью магнитного поля. Источник тока возбуждает катушку на множестве различных частот импульсов. Процессор вычисляет функцию электродвижущей силы на множестве различных частот импульсов и генерирует выходное значение расхода, основанное на функции. Технический результат - улучшение точности измерения потока и защита от неисправностей. 3 н. и 12 з.п. ф-лы, 5 ил.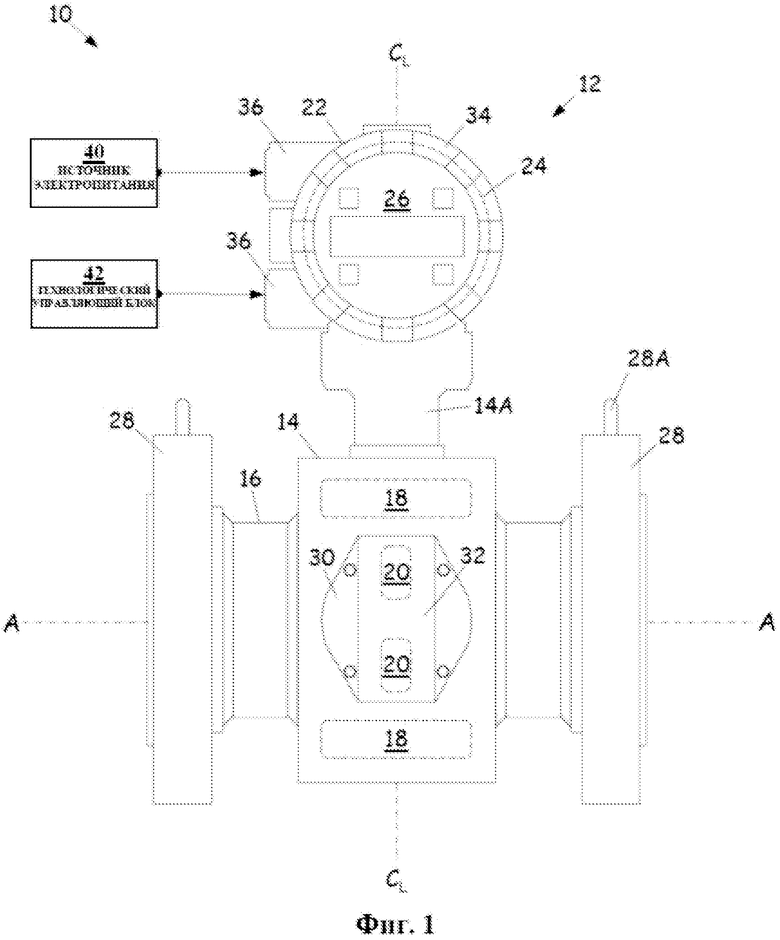
1. Электромагнитный расходомер, содержащий:
участок трубопровода для технологического потока;
катушку для создания магнитного поля поперек участка трубопровода;
источник тока для возбуждения катушки для создания магнитного поля, при этом источник тока возбуждает катушку на множестве различных частот импульсов;
электрод для обнаружения электродвижущей силы, индуцированной поперек технологического потока с помощью магнитного поля; и
процессор для вычисления функции электродвижущей силы на множестве различных частот импульсов и для создания выходного значения расхода, основанного на функции, при этом функция содержит средневзвешенное значение электродвижущей силы на множестве различных частот импульсов, взвешенное на основании разницы между электродвижущей силой на каждой из различных частот импульсов и обычным средним значением, при этом средневзвешенное значение исключает по меньшей мере одну из различных частот импульсов, основанных на разнице.
2. Электромагнитный расходомер по п. 1, отличающийся тем, что функция содержит обычное среднее значение электродвижущей силы на каждой из различных частот импульсов.
3. Электромагнитный расходомер по п. 2, отличающийся тем, что множество различных частот импульсов содержит по меньшей мере три различных частоты импульсов.
4. Электромагнитный расходомер по п. 1, отличающийся тем, что выходное значение расхода содержит аварийное значение, основанное на разнице.
5. Электромагнитный расходомер по п. 1, отличающийся тем, что средневзвешенное значение содержит нулевое взвешивание и единичное взвешивание, основанные на разнице между значением электродвижущей силы на определенной частоте импульсов и обычным средним значением, при этом нулевое взвешивание исключает значение электродвижущей силы на определенной частоте из выходного значения расхода, и при этом единичное взвешивание включает значение электродвижущей силы на определенной частоте в выходном значении расхода.
6. Электромагнитный расходомер по п. 1, отличающийся тем, что электрод обнаруживает электродвижущую силу при множестве различных фаз.
7. Электромагнитный расходомер по п. 6, отличающийся тем, что функция содержит среднее значение электродвижущей силы при множестве различных фаз.
8. Электромагнитный расходомер, содержащий:
участок трубопровода, при этом участок трубопровода имеет внутренний диаметр и внешний диаметр;
катушку, приближенную к внешнему диаметру участка трубопровода;
источник импульсного тока, соединенный с катушкой, при этом источник импульсного тока обеспечивает множество различных частот импульсов;
электроды, проходящие от внешнего диаметра участка трубопровода к внутреннему диаметру участка трубопровода, при этом электроды обнаруживают электродвижущую силу поперек участка трубопровода; и
процессор, соединенный с электродами, при этом процессор генерирует выходное значение расхода как функцию электродвижущей силы на множестве различных частот импульсов, при этом функция содержит средневзвешенное значение электродвижущей силы на множестве различных частот импульсов, взвешенное на основании разницы между электродвижущей силой на каждой из различных частот импульсов и обычным средним значением, при этом средневзвешенное значение исключает по меньшей мере одну из различных частот импульсов, основанных на разнице.
9. Расходомер по п. 8, отличающийся тем, что дополнительно содержит внутреннее покрытие на внутреннем диаметре участка трубопровода, при этом электроды проходят через внутреннее покрытие для контактирования с технологическим потоком.
10. Расходомер по п. 8, отличающийся тем, что функция содержит обычное среднее значение электродвижущей силы на каждой из различных частот импульсов.
11. Расходомер по п. 8, отличающийся тем, что выходное значение расхода содержит аварийное значение, основанное на разнице.
12. Расходомер по п. 8, отличающийся тем, что функция содержит среднее значение электродвижущей силы при множестве различных фаз.
13. Способ измерения расхода, включающий этапы, на которых:
создают импульсное магнитное поле поперек технологического потока;
обнаруживают электродвижущую силу, индуцированную поперек технологического потока с помощью импульсного магнитного поля;
изменяют частоту импульсного магнитного поля, при этом импульсное магнитное поле содержит множество различных частот импульсов;
вычисляют средневзвешенное значение электродвижущей силы на множестве различных частот импульсов, основанное на разнице между электродвижущей силой на каждой из различных частот импульсов и обычным средним значением;
исключают по меньшей мере одну из различных частот импульсов, основанных на разнице; и
генерируют выходное значение расхода, основанное на среднем значении.
14. Способ по п. 13, отличающийся тем, что дополнительно включает этап, на котором генерируют аварийное значение, основанное на разнице.
15. Способ по п. 13, отличающийся тем, что обнаружение электродвижущей силы включает этап, на котором обнаруживают электродвижущую силу при множестве различных фаз, и при этом вычисление среднего значения включает этап, на котором вычисляют среднее значение электродвижущей силы на множестве различных частот импульсов и при множестве различных фаз.
| US 5443552 A, 22.08.1995, фиг.1-9, п.1, 2, 4, 7 ф-лы | |||
| JP 0009311061 A, 02.12.1997, реферат, фиг.1 | |||
| US 7637169 B2, 29.12.2009, реферат, фиг.1, 2 | |||
| KR 100729643 B1, 12.06.2007 | |||
| JP 2003315121 A, 06.11.2003.. |

