Изобретение относится к области радиотехники и может быть использовано в системах мониторинга напряженно-деформированного состояния объектов.
Известны «Датчик механических напряжений» (патент США №3888115 А, опубл. 10.06.1975 года, МПК G01B 7/16) и «Устройство преобразования движения на основе задержки поверхностных акустических волн» (патент США №3848144 А, опубл. 12.11.1974 года, МПК H01V 7/00), содержащие устройство на поверхностных акустических волнах (ПАВ) в виде консоли, внешнее воздействие на которую изгибает ее, что приводит к изменению измеряемых параметров. Недостатки данных устройств заключаются в том, что они являются проводными и активными (требуются элементы питания). Более того, в данных устройствах используются линии задержки на ПАВ, что ухудшает точность измерений и чувствительность устройств, а также в них отсутствуют элементы конструкции, передающие внешнее воздействие к консоли. Предложенные устройства не могут быть использованы для измерения перемещений в широком диапазоне значений в условиях воздействия факторов окружающей среды.
Известны также пассивные беспроводные устройства на ПАВ для измерения механических напряжений, вызванных силовыми нагрузками, (патент США №7886607 В2, опубл. 15.02.2011 года, МПК G01L 13/02; патент США №7730772 В2, опубл. 08.06.2010 года, МПК G01L 9/00; патент РФ №2401999 C1, опубл. 20.10.2010 года, МПК G01L 1/16), состоящие из корпуса, внутри которого консольно закреплено устройство на ПАВ с резонаторами. Общим недостатком данных устройств является их непригодность для точных измерений перемещений, поскольку известно, что точное измерение силы, вызывающей относительное перемещение отдельных частей датчика, и точное измерение самого перемещения, которое вызвано этой силой, конфликтуют между собой, поэтому конструкции данных датчиков пригодны лишь для точного измерения соответствующих сил.
Наиболее близким по технической сущности к предлагаемому техническому решению является «Датчик на поверхностных акустических волнах для беспроводного пассивного измерения перемещений» (патент РФ №2486646 C1, опубл. 27.06.2013 года, МПК H01Q 23/00, G01S 13/75), содержащий устройство на поверхностных акустических волнах (ПАВ) с антенной и платой с резонаторами на ПАВ, консольно-установленной в герметичном корпусе устройства, две упругие мембраны, установленные в двух крышках, расположенных сверху и снизу основания корпуса, и жестко соединенные с элементом, передающим перемещение - штоком, имеющим выступ, который контактирует со свободным концом платы с резонаторами на ПАВ, электрически связанными с антенной через металлостеклянные изоляторы.
В данном датчике величина измеряемого перемещения передается к плате устройства на ПАВ с помощью штока. Выступ штока воздействует на свободный край платы, вызывая ее смещение на величину перемещения штока. Под воздействием прогиба платы резонансная частота резонатора меняется, что регистрируется опросом датчика с помощью считывающего устройства.
Недостатком описанного устройства является то, что датчик данной конструкции не может регистрировать минимальные перемещения контролируемого объекта, вызванные деформационными процессами.
Технический результат заявляемого датчика для беспроводного пассивного измерения перемещений заключается в увеличении пределов измерения перемещений в реальных условиях эксплуатации с сохранением высокой точности измерений.
Для достижения указанного технического результата в датчике на ПАВ для беспроводного пассивного измерения перемещений, содержащем устройство на ПАВ, состоящее из корпуса, образованного основанием корпуса и двумя герметично установленными верхней и нижней крышками с упругими мембранами, жестко соединенными с металлическим штоком, имеющим выступ, контактирующий с прокладкой, расположенной на свободном конце консольно закрепленной с помощью прижимных пластин внутри корпуса платы с резонаторами на ПАВ, электрически связанными через впаянные в крышку металлостеклянные изоляторы с антенной, размещенной над верхней крышкой корпуса, устройство на ПАВ установлено на трансформатор механических перемещений (ТМП), выполненный в виде основания с продольным пазом и имеющий две грани, расположенные перпендикулярно основанию трансформатора, в каждой из которых выполнено отверстие до продольного паза основания трансформатора, в которое установлен прижимной механизм, при этом в продольный паз трансформатора с возможностью возвратно-поступательного движения помещен элемент, передающий перемещение, имеющий продольную клинообразную выемку, выполненную на его поверхности в месте контакта со штоком устройства на ПАВ, и возвратный механизм, расположенный на одном конце элемента, передающего перемещение.
Установка устройства на ПАВ на ТМП с элементом, передающим перемещение, выполненным в виде стержня с продольной клинообразной выемкой, выполненной на его поверхности в месте контакта со штоком устройства на ПАВ, позволяет расширить диапазон измеряемых перемещений (от 0 до 10000 мкм). При возникновении малейших деформационных процессов на контролируемом объекте происходит сдвиг стержня, воздействующего на шток. Шток датчика, контактирующий с клинообразной выемкой стержня, опускаясь или поднимаясь по выемке, также перемещается на некоторую величину и воздействует на плату с резонаторами на ПАВ, изгибая ее свободный край. В результате прогиба платы резонансная частота резонаторов изменяется, что регистрируется считывающим устройством. На основании полученных данных определяют величину перемещения.
Таким образом, диапазон измерений напряженно-деформированного состояния объектов расширяется, становится возможным регистрировать малейшие перемещения, вызванные деформационными процессами на контролируемом объекте, и своевременно принимать меры по устранению аварийных ситуаций.
Сущность изобретения поясняется следующими чертежами:
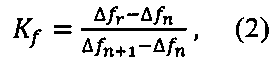
Фиг. 1 - общий вид датчика на ПАВ для беспроводного пассивного измерения перемещений, установленного на механический трансформатор (продольное сечение).
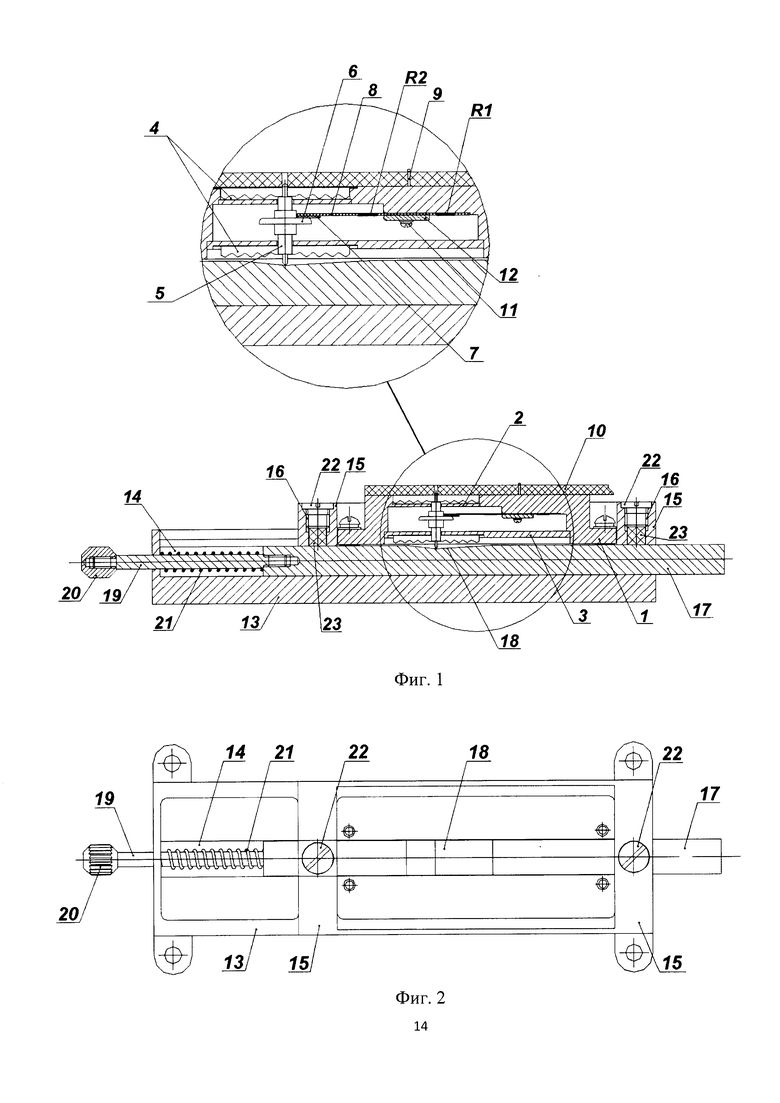
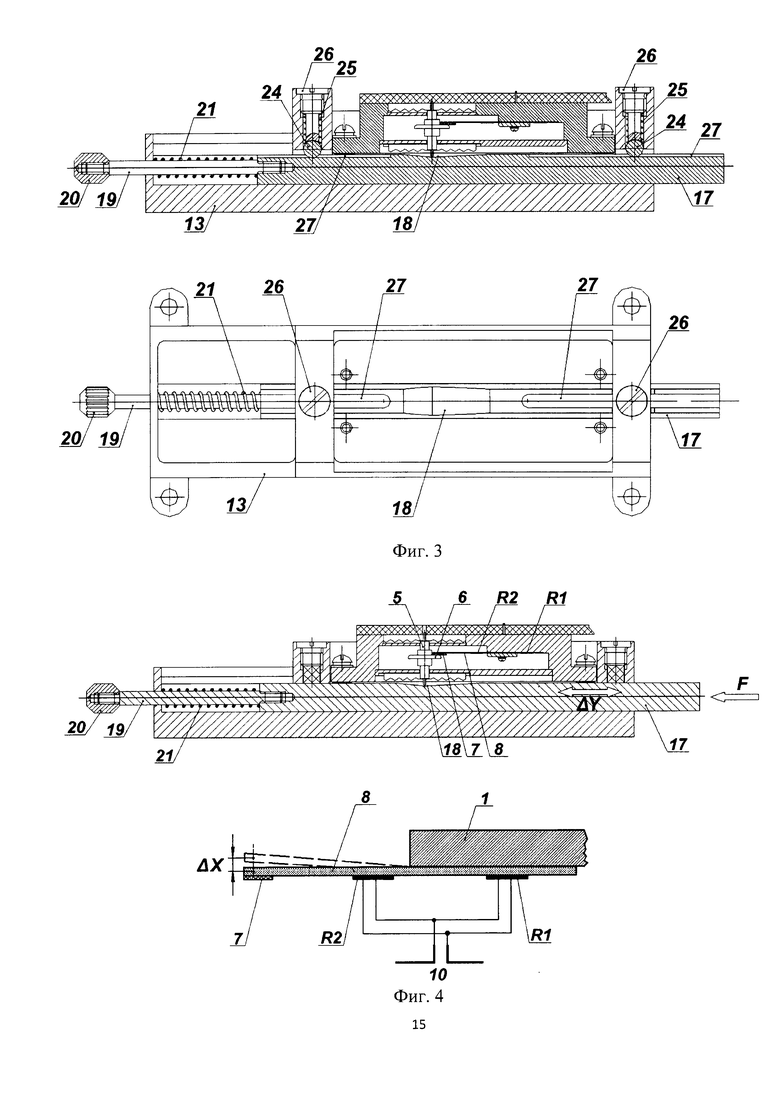
Фиг. 2 - механический трансформатор с элементом, передающим перемещение, выполненным в виде стержня (вид сверху).
Фиг. 3 - механический трансформатор с элементом, передающим перемещение, выполненным в виде стержня круглого поперечного сечения со срезанным параллельно оси стержня верхом (продольное сечение и вид сверху).
Фиг. 4 - принцип работы датчика на ПАВ для беспроводного пассивного измерения перемещений.
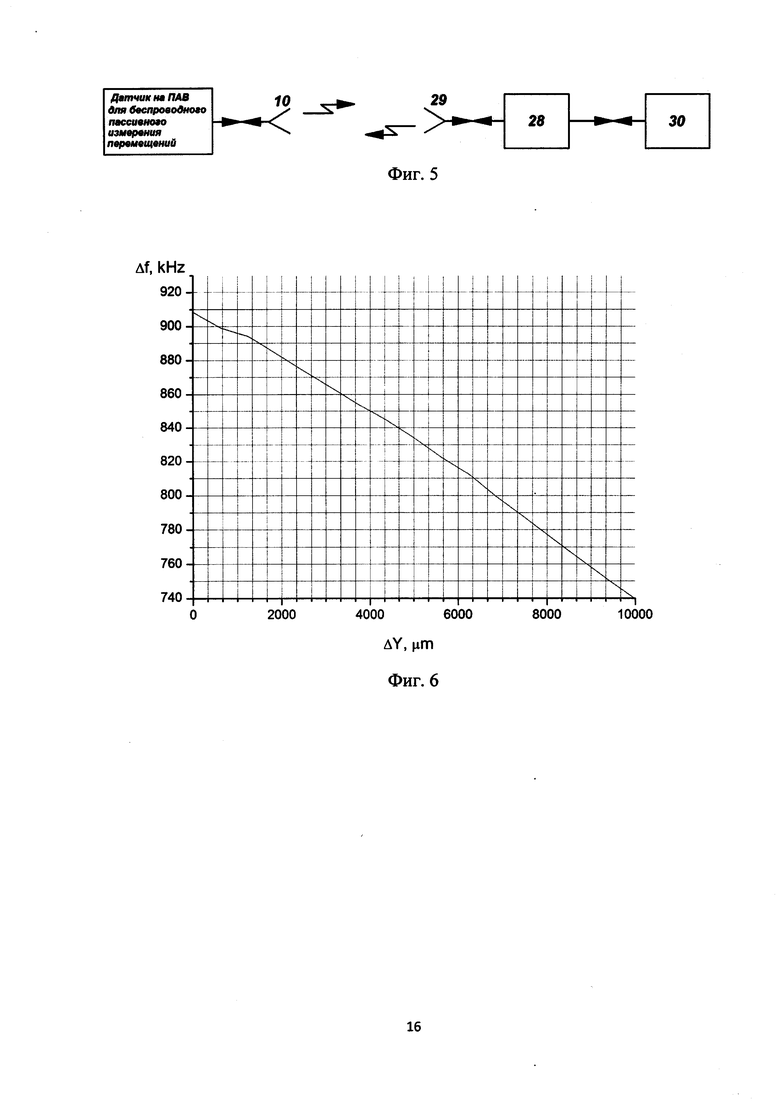
Фиг. 5 - блок-схема опроса датчика на ПАВ для беспроводного пассивного измерения перемещений считывающим устройством.
Фиг. 6 - график калибровки датчика на ПАВ для беспроводного пассивного измерения перемещений.
Датчик на ПАВ для беспроводного пассивного измерения перемещений (фиг. 1) содержит устройство на ПАВ, представляющее собой корпус 1 с верхней 2 и нижней 3 крышками с впаянными в них упругими мембранами 4, в центрах которых с помощью сварки, пайки или клея жестко закреплен металлический шток 5. Мембраны 4 могут быть выполнены из металла, обладающего хорошими упругими свойствами, например, из бериллиевой бронзы, и предусмотрены для обеспечения герметичности устройства на ПАВ, а также перемещения штока 5 в направлении его оси на требуемую величину при минимальном усилии, прикладываемом к штоку 5, жестко удерживая его от перемещений в поперечных направлениях, что влияет на стабильность и точность результатов измерений.
Шток 5 имеет выступ 6, который контактирует с тонкой прокладкой 7, расположенной на свободном (деформируемом) конце консольно закрепленной внутри корпуса 1 платы 8 из пьезоэлектрического монокристалла (ниобата лития, танталата лития, лангасита и т.д.) с установленными на ней двумя резонаторами на ПАВ R1 и R2 соответственно (фиг. 1). Прокладка 7 может быть выполнена из твердого материала (например, лейкосапфира) и предусмотрена для исключения изнашивания материала платы 8 в месте контакта со штоком 5 в процессе эксплуатации датчика, и, как следствие, искажения результатов измерения с нарастанием ошибки в процессе эксплуатации датчика. Величина измеряемого перемещения передается к плате 8 устройства на ПАВ через тонкую прокладку 7 с помощью выступа 6 штока 5.
Резонатор R1 расположен на недеформируемой части платы 8, а резонатор R2 - на деформируемой части платы 8. Резонансная частота резонатора R1 зависит только от внешней температуры, а резонансная частота резонатора R2 зависит от величины смещения ΔΧ края консоли и внешней температуры, при этом разность этих двух частот зависит только от величины смещения ΔХ края консоли.
Резонаторы R1 и R2 через металлостеклянные изоляторы 9, обеспечивающие герметичность внутренней полости корпуса 1, подключены к антенне 10, установленной над верхней 2 крышкой корпуса 1 (фиг. 1). Плата 8 плотно прижимается к основанию корпуса 1 устройства на ПАВ с помощью винтов 11 и пластины 12.
Устройство на ПАВ в корпусе 1 устанавливается на ТМП (фиг. 1, 2), представляющий собой монолитное основание 13 с продольным пазом 14, имеющее две грани 15, расположенные перпендикулярно основанию 13 трансформатора, в каждой из которых выполнено отверстие 16 до продольного паза 14 основания 13 трансформатора, в которое установлен прижимной механизм. В продольный паз 14 с возможностью возвратно-поступательного движения помещен элемент, передающий перемещение, выполненный в виде стержня 17. При этом основание 13 ТМП, стержень 17 и шток 5 устройства на ПАВ выполнены из разнородных материалов, чтобы избежать их истирания в подвижных частях конструкции датчика.
Стержень 17 имеет продольную клинообразную выемку 18, выполненную на его поверхности в месте контакта со штоком 5 устройства на ПАВ. Длина стержня 17 и геометрические параметры клинообразной выемки 18 выбираются в соответствии с диапазоном измеряемого перемещения. Выполнение выемки 18 клинообразной формы обеспечивает возможность регистрации перемещения стержня 17 при малейшем смещении в одну и другую стороны вдоль его оси, что позволяет свести погрешности измерений всего устройства к минимуму, а также предотвратить повреждение штока 5.
Один конец стержня 17 снабжен возвратным механизмом, представляющим собой ввинченную в стержень 17 шпильку 19 с головкой 20. На шпильке 19 предусмотрена возвратная пружина 21, концы которой упираются в стержень 17 и основание 13 ТМП соответственно и которая дает возможность регулировать силу, обеспечивающую перемещение и возврат стержня 17.
Другие признаки, характерные для частного варианта исполнения настоящего изобретения, изложены в зависимых пунктах формулы изобретения. Заявленное изобретение не ограничено перечисленными особенностями, поскольку могут быть выполнены различные модификации и структурные изменения без отклонения от сущности изобретения и в пределах объема притязаний и серии эквивалентов.
Стержень 17 ТМП может иметь прямоугольное (фиг. 2) или круглое поперечное сечение со срезанным параллельно оси стержня 17 верхом (фиг. 3).
При выполнении стержня 17 прямоугольного поперечного сечения прижимной механизм состоит из винтов 22 и износостойких прокладок 23, выполненных, например, из фторопласта (фиг. 1), обеспечивающих плавный ход стержня 17 и, соответственно, стабильность и точность результатов измерений.
При выполнении стержня 17 круглого поперечного сечения со срезанным параллельно оси стержня 17 верхом прижимной механизм выполнен в виде металлических шариков 24, пружин 25 и винтов 26 со сферическими углублениями на концах (фиг. 3). Стержень 17 также имеет канавки 27, выполненные на срезанной поверхности с двух сторон от клинообразной выемки 18, радиус которых соответствует радиусу шариков 24.
Шарики 24 располагаются в канавках 27 стержня 17, прижимаясь пружинами 25 и винтами 26. Сферические углубления на концах винтов 26 препятствуют поступательному движению шариков 24, благодаря чему обеспечивается плавный ход стержня 17 и практически полное отсутствие его вращения.
Датчик на ПАВ для беспроводного пассивного измерения перемещений работает следующим образом.
Датчик устанавливается на контролируемую поверхность таким образом, чтобы свободный конец стержня 17 ТМП поджимался упорным приспособлением, закрепленным на контролируемой поверхности в точке, удаленной от датчика на расстояние, достаточное для контроля напряженно-деформированного состояния поверхности. При этом пружина 21 возвратного механизма ТМП находится в поджатом состоянии. При внешнем воздействии F стержень 17 перемещается на некоторую величину ΔY (фиг. 4). С помощью клинообразной выемки 18, предусмотренной в месте контакта стержня 17 со штоком 5 датчика, стержень 17 воздействует на шток 5, вызывая его смещение в направлении, перпендикулярном плоскости платы 8 устройства на ПАВ. Выступ 6 штока 5 через тонкую пластину 7 воздействует на плату 8 устройства на ПАВ, изгибая ее свободный край на величину ΔХ, в К раз меньшую величины ΔY, где К - коэффициент трансформации (ΔY=ΔХ·К). В результате прогиба платы 8 резонансная частота резонатора R2 изменяется. Данное изменение регистрируется опросом датчика с помощью считывающего устройства 28 (фиг. 5). На основании полученных данных определяют величину смещения ΔХ и величину перемещения ΔY соответственно.
Коэффициент трансформации К определяется углом раскрытия выемки 18 в стрежне 17 и рассчитывается исходя из необходимых пределов измерения. В данной работе при расчете закладывались пределы измерения от 0 до 10000 мкм, что соответствует К=20. Отклонение значения К от номинального значения учитывается при калибровке и связано оно с производственными возможностями.
Опрос датчика считывающим устройством 28 происходит следующим образом (фиг. 5). По команде с компьютера 30 считывающее устройство 28 формирует N опросных радиоимпульсов, где N равно, например, 5, с фиксированными, равно отстоящими несущими частотами f01…fN (например, f01=433 МГц и f0N=434 МГц). Длительность каждого опросного импульса зависит от добротности резонаторов и при нагруженной добротности (например, ~8000) может составлять, например, ~10 мкс. Опросные импульсы через антенну 29 считывающего устройства 28 излучаются в направлении датчика на ПАВ. Датчик на ПАВ с помощью антенны 10 передает на каждый опросный радиоимпульс ответные сигналы, которые поступают в считывающее устройство 28. Считывающее устройство 28 выполняет усиление, фильтрацию и оцифровку принятых сигналов. Оцифрованные сигналы передаются в компьютер 30, где проходят обработку в соответствии с заданными алгоритмами. В результате обработки в компьютере 30 определяются резонансные частоты резонаторов fR1 и fR2, по значениям которых вычисляют величину смещения платы 8 ΔХ и величину перемещения ΔY соответственно.
Алгоритм определения величины перемещения ΔY включает выполнение следующих процедур.
Ввод исходных данных, полученных в результате оцифровки считывающим устройством 28 N импульсных откликов датчика, полученных при опросе N радиоимпульсами с фиксированными частотами заполнения f01…fN.
Вычисление резонансных частот резонаторов R1 и R2 по оцифрованным импульсным откликам:


где i - номер импульсного отклика от 1 до N;  - импульсный отклик датчика; T1 - длительность импульсного отклика (зависит от добротности используемых резонаторов); частоты f1 и f2 задают диапазон частот для поиска частоты fR1, при которой имеет место максимум преобразования (1); частоты f3 и f4 задают диапазон частот для поиска частоты fR2 при которой имеет место максимум преобразования (2).
- импульсный отклик датчика; T1 - длительность импульсного отклика (зависит от добротности используемых резонаторов); частоты f1 и f2 задают диапазон частот для поиска частоты fR1, при которой имеет место максимум преобразования (1); частоты f3 и f4 задают диапазон частот для поиска частоты fR2 при которой имеет место максимум преобразования (2).
В результате вычисления по (1) и (2) может быть получено N значений частот fR1 и fR2, при которых имеет место максимум преобразований (1) и (2). За значения частот fR1 и fR2 выбираются те значения, для которых максимум преобразований (1) и (2) имеет максимальную величину.
Окончательно величина перемещения ΔY определяется по разности частот ΔfR=fR2-fR1 и данным предварительной калибровки датчика:

где Δfn, Δfn+1, ΔXn, ΔXn+1 и ΔKn, ΔKn+1 - данные калибровки в виде набора значений разности частот резонаторов Δfn и соответствующих им значений перемещения штока датчика ΔXn и коэффициентов трансформации Kn. Калибровка проводится путем задания известных перемещений (например, с помощью прибора ППГ-3) и определения по описанному выше алгоритму соответствующих им разностей частот ΔfR.
На фиг. 6 приведен пример графика калибровки датчика на поверхностных акустических волнах для беспроводного пассивного измерения перемещений, изготовленного для апробации предлагаемого изобретения.
В результате испытаний опытного образца датчика на поверхностных акустических волнах для беспроводного пассивного измерения перемещений, изготовленного в соответствии с предлагаемым техническим решением, получены положительные результаты, подтверждающие высокую точность измерения перемещений. Так, при расстоянии между антенной датчика и антенной считывающего устройства, равном 5 м, погрешность определения перемещения, при величине измеряемого перемещения от 50 мкм до 10000 мкм, составила ±10 мкм. Точное значение перемещения определялось по прибору ППГ-3.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ ДЛЯ БЕСПРОВОДНОГО ПАССИВНОГО ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ | 2012 |
|
RU2486646C1 |
| Устройство считывания информации с беспроводного датчика на поверхностных акустических волнах | 2020 |
|
RU2748391C1 |
| СПОСОБ И СИСТЕМА АВТОМАТИЧЕСКОГО КОНТРОЛЯ КОНТАКТНОГО ПРОВОДА ЭЛЕКТРОТРАНСПОРТА | 2017 |
|
RU2750823C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ДАТЧИКА ЛИНЕЙНЫХ СИЛ СЖАТИЯ-РАСТЯЖЕНИЯ | 2009 |
|
RU2401999C1 |
| Система измерения температуры шин электрических шкафов | 2020 |
|
RU2748868C1 |
| Бесконтактный датчик тока на поверхностных акустических волнах | 2021 |
|
RU2779616C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ ДЛЯ ИЗМЕРЕНИЯ ДАВЛЕНИЯ ЖИДКОСТЕЙ И ГАЗОВ | 2017 |
|
RU2658596C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ ТЕПЛОНОСИТЕЛЯ | 2008 |
|
RU2373502C1 |
| ПАССИВНЫЙ БЕСПРОВОДНЫЙ ДАТЧИК НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ ДЛЯ ИЗМЕРЕНИЯ КОНЦЕНТРАЦИИ МОНООКИСИ УГЛЕРОДА | 2015 |
|
RU2581570C1 |
| Пассивный беспроводной датчик ультрафиолетового излучения на поверхностных акустических волнах | 2018 |
|
RU2692832C1 |
Изобретение относится к метрологии, в частности к средствам мониторинга напряженно-деформированного состояния объектов. Датчик содержит устройство на ПАВ, состоящее из корпуса, образованного верхней и нижней крышками с упругими мембранами, жестко соединенными с металлическим штоком, имеющим выступ, контактирующий с прокладкой, расположенной на свободном конце консольно закрепленной с помощью прижимных пластин внутри корпуса платы с резонаторами на ПАВ, электрически связанными с антенной, размещенной над верхней крышкой корпуса. Устройство установлено на трансформатор механических перемещений, выполненный в виде основания с продольным пазом и имеющий две грани, расположенные перпендикулярно основанию трансформатора, в каждой из которых выполнено отверстие до продольного паза основания трансформатора, в которое установлен прижимной механизм. При этом в продольный паз помещен элемент, передающий перемещение, имеющий продольную клинообразную выемку, выполненную на его поверхности в месте контакта со штоком устройства на ПАВ, и возвратный механизм. Прижимной механизм состоит из винтов и прокладок, либо из пружин, винтов и шариков. При этом радиус шариков соответствует радиусу канавок стержня. Технический результат - увеличение пределов измерения перемещений. 2 з.п. ф-лы, 6 ил.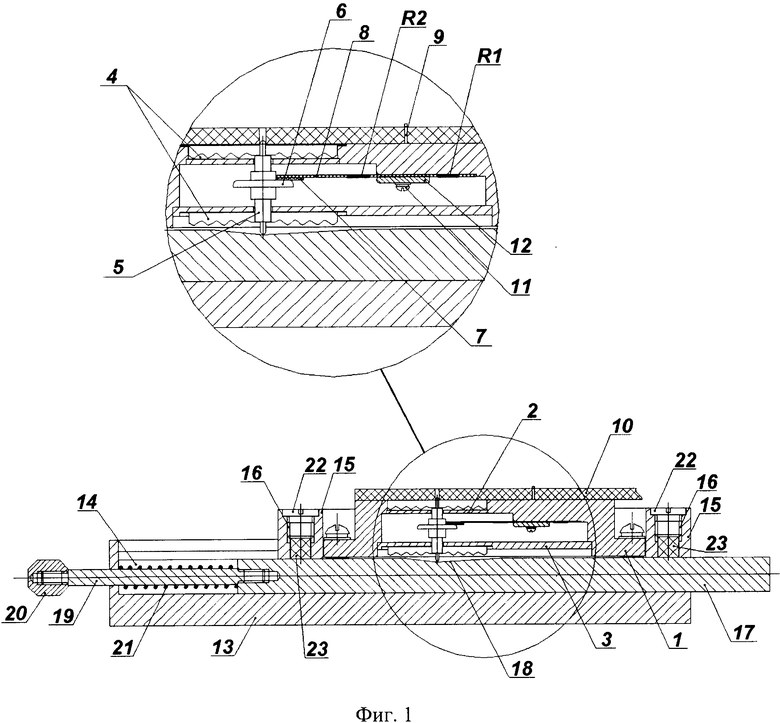
1. Датчик на поверхностных акустических волнах (ПАВ) для беспроводного пассивного измерения перемещений, содержащий устройство на ПАВ, состоящее из корпуса, образованного основанием корпуса и двумя герметично установленными верхней и нижней крышками с упругими мембранами, жестко соединенными с металлическим штоком, имеющим выступ, контактирующий с прокладкой, расположенной на свободном конце консольно закрепленной с помощью прижимных пластин внутри корпуса платы с резонаторами на ПАВ, электрически связанными через впаянные в крышку металлостеклянные изоляторы с антенной, размещенной над верхней крышкой корпуса, отличающийся тем, что устройство на ПАВ установлено на трансформатор механических перемещений, выполненный в виде основания с продольным пазом и имеющий две грани, расположенные перпендикулярно основанию трансформатора, в каждой из которых выполнено отверстие до продольного паза основания трансформатора, в которое установлен прижимной механизм, при этом в продольный паз трансформатора с возможностью возвратно-поступательного движения помещен элемент, передающий перемещение, имеющий продольную клинообразную выемку, выполненную на его поверхности в месте контакта со штоком устройства на ПАВ, и возвратный механизм, расположенный на одном конце элемента, передающего перемещение.
2. Датчик на ПАВ для беспроводного пассивного измерения перемещений по п. 1, отличающийся тем, что элемент, передающий перемещение, выполнен в виде стержня прямоугольного поперечного сечения, при этом прижимной механизм трансформатора механических перемещений состоит из винтов и прокладок.
3. Датчик на ПАВ для беспроводного пассивного измерения перемещений по п. 1, отличающийся тем, что элемент, передающий перемещение, выполнен в виде стержня круглого поперечного сечения со срезанным параллельно оси стержня верхом и имеет канавки, выполненные на срезанной поверхности с двух сторон от клинообразной выемки, при этом прижимной механизм трансформатора механических перемещений состоит из пружин, винтов со сферическими углублениями на концах и шариков, радиус которых соответствует радиусу канавок.
| ДАТЧИК НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ ДЛЯ БЕСПРОВОДНОГО ПАССИВНОГО ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ | 2012 |
|
RU2486646C1 |
| JP 2009216440 A, 24.09.2009 | |||
| US 7877894 B2, 04.02.2010 | |||
| US 7467480 B2, 23.12.2008. | |||

