ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[1] Настоящее изобретение, в общем, относится к системе на основе гибридного автоматического запроса на повторную передачу (HARQ), а более конкретно к способу и устройству HARQ для системы, работающей, по меньшей мере, с двумя сотами.
УРОВЕНЬ ТЕХНИКИ
[2] Системы мобильной связи эволюционируют в системы высокоскоростной высококачественной беспроводной передачи пакетных данных, такие как системы по стандарту высокоскоростного пакетного доступа (HSPA) и по стандарту долгосрочного развития (LTE) Партнерского проекта третьего поколения (3GPP), по стандарту высокоскоростной передачи пакетных данных (HRPD) Партнерского проекта третьего поколения 2 (3GPP2), по стандарту сверхширокополосной связи для мобильных устройств (UMB) и по стандарту Института инженеров по электротехнике и радиоэлектронике (IEEE) 802.16e. Эти системы беспроводной передачи пакетных данных предоставляют услуги передачи данных и мультимедийные услуги помимо изначальных речевых услуг.
[3] В качестве характерного стандарта широкополосной радиосвязи LTE применяет мультиплексирование с ортогональным частотным разделением каналов (OFDM) в нисходящей линии связи и множественный доступ с частотным разделением каналов с одной несущей (SC-FDMA) в восходящей линии связи.
[4] Чтобы противостоять возникновению сбоя при декодировании при начальной передаче, LTE применяет HARQ для повторной передачи приведших к сбою при декодировании данных на физическом уровне. HARQ является технологией, в которой, когда декодирование завершается сбоем, приемное устройство отправляет в передающее устройство отрицание приема (NACK), позволяя передающему устройству повторно передавать приведшие к сбою при декодировании данные. Если данные декодируются успешно, приемное устройство отправляет в передающее устройство подтверждение приема (ACK), позволяя передающему устройству отправлять новые данные.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ЗАДАЧА
[5] Требуется предоставление способа и устройства HARQ, которые способны повысить эффективность связи в системе связи, имеющей несколько сот.
РЕШЕНИЕ ЗАДАЧИ
[6] Предоставляются способы и устройства для того, чтобы поддерживать HARQ в системе связи, применяющей перекрестную диспетчеризацию несущих. Вторая сота диспетчеризуется в первой соте. Принимаются данные, передаваемые посредством терминала, в субкадре второй соты. Определяется субкадр, в первой соте, для передачи подтверждения приема HARQ, соответствующего данным, и определяется субкадр, в первой соте, переносящий информацию диспетчеризации второй соты. Определяется то, являются ли идентичными субкадр для передачи подтверждения приема HARQ и субкадр, переносящий информацию диспетчеризации второй соты. Когда субкадр для передачи подтверждения приема HARQ и субкадр, переносящий информацию диспетчеризации, не являются идентичными, субкадр для передачи подтверждения приема HARQ и субкадр, переносящий информацию диспетчеризации, согласуются друг с другом.
ПРЕИМУЩЕСТВА ИЗОБРЕТЕНИЯ
[7] [8] Настоящее изобретение осуществлено для того, чтобы разрешать, по меньшей мере, вышеописанные проблемы и/или недостатки и предоставлять, по меньшей мере, преимущества, описанные ниже. Соответственно, аспект настоящего изобретения предоставляет способ и устройство HARQ, которые способны повысить эффективности связи в системе связи, имеющей несколько сот.
[9] В соответствии с аспектом настоящего изобретения предоставляется способ связи для базовой станции, поддерживающей HARQ в системе связи, применяющей перекрестную диспетчеризацию несущих. Вторая сота диспетчеризуется в первой соте. Принимаются данные, передаваемые посредством терминала, в субкадре второй соты. Определяется субкадр, в первой соте, для передачи подтверждения приема HARQ, соответствующего данным, и определяется субкадр, в первой соте, переносящий информацию диспетчеризации второй соты. Определяется то, являются ли идентичными субкадр для передачи подтверждения приема HARQ и субкадр, переносящий информацию диспетчеризации второй соты. Когда субкадр для передачи подтверждения приема HARQ и субкадр, переносящий информацию диспетчеризации, не являются идентичными, субкадр для передачи подтверждения приема HARQ и субкадр, переносящий информацию диспетчеризации, согласуются друг с другом.
[10] В соответствии с другим аспектом настоящего изобретения предоставляется способ связи для терминала, поддерживающего HARQ в системе связи, применяющей перекрестную диспетчеризацию несущих. Данные передаются в базовую станцию в субкадре второй соты, диспетчеризованной посредством первой соты. Подтверждение приема HARQ, соответствующее данным, и информация диспетчеризации для второй соты принимаются в согласованном субкадре в первой соте.
[11] В соответствии с другим аспектом настоящего изобретения предоставляется базовая станция для поддержки HARQ в системе связи, применяющей перекрестную диспетчеризацию несущих. Базовая станция включает в себя приемо-передающее устройство, которое передает и принимает данные, по меньшей мере, через одну из первой соты и второй соты. Базовая станция также включает в себя контроллер, который диспетчеризует вторую соту посредством первой соты, принимает данные, передаваемые посредством терминала, в субкадре второй соты, определяет субкадр, в первой соте, для передачи подтверждения приема HARQ, соответствующего данным, и субкадр, в первой соте, переносящий информацию диспетчеризации второй соты, определяет то, являются ли идентичными субкадр для передачи подтверждения приема HARQ и субкадр, переносящий информацию диспетчеризации второй соты, и когда субкадр для передачи подтверждения приема HARQ и субкадр, переносящий информацию диспетчеризации, не являются идентичными, согласует субкадр для передачи подтверждения приема HARQ и субкадр, переносящий информацию диспетчеризации второй соты, друг с другом.
[12] В соответствии с еще одним другим аспектом настоящего изобретения, предоставляется терминал для поддержки HARQ в системе связи, применяющей перекрестную диспетчеризацию несущих. Терминал включает в себя приемо-передающее устройство, которое передает и принимает данные, по меньшей мере, через одну из первой соты и второй соты. Терминал также включает в себя контроллер, который принимает подтверждение приема HARQ, соответствующее данным, и информацию диспетчеризации для второй соты в согласованном субкадре в первой соте. Вторая сота диспетчеризуется посредством первой соты.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[13] Вышеуказанные и другие аспекты, признаки и преимущества настоящего изобретения должны становиться более понятными из нижеприведенного подробного описания, рассматриваемого вместе с прилагаемыми чертежами, из которых:
[14] Фиг. 1 является схемой, иллюстрирующей агрегирование несущих для компонентных несущих в системе на основе усовершенствованного стандарта LTE (LTE-A), согласно варианту осуществления настоящего изобретения;
[15] Фиг. 2 является схемой, иллюстрирующей перекрестную диспетчеризацию несущих в LTE-A-системе, поддерживающей агрегирование несущих, согласно варианту осуществления настоящего изобретения;
[16] Фиг. 3 является схемой, иллюстрирующей взаимосвязь периодов времени передачи/приема LTE-системы, работающей в конфигурации #1 нисходящей-восходящей линии связи в режиме дуплекса с временным разделением каналов (TDD), согласно варианту осуществления настоящего изобретения;
[17] Фиг. 4 является блок-схемой последовательности операций, иллюстрирующей способ для усовершенствованного узла B (eNB) и/или абонентского устройства (UE), чтобы проверять период времени передачи/приема, согласно варианту осуществления настоящего изобретения;
[18] Фиг. 5 является схемой, иллюстрирующей взаимосвязь периодов времени передачи/приема физического канала индикатора HARQ (PHICH) и/или физического канала управления нисходящей линии связи (PDCCH) при условии i<k, согласно варианту осуществления настоящего изобретения;
[19] Фиг. 6 является схемой, иллюстрирующей взаимосвязь периодов времени передачи/приема PHICH и/или PDCCH при условии i<k, согласно другому варианту осуществления настоящего изобретения;
[20] Фиг. 7 является блок-схемой последовательности операций, иллюстрирующей процедуру eNB в способе HARQ, согласно варианту осуществления настоящего изобретения;
[21] Фиг. 8 является блок-схемой последовательности операций, иллюстрирующей процедуру UE в способе HARQ, согласно варианту осуществления настоящего изобретения;
[22] Фиг. 9 является схемой, иллюстрирующей взаимосвязь периодов времени передачи/приема PHICH и/или PDCCH при условии i<k, согласно другому варианту осуществления настоящего изобретения;
[23] Фиг. 10 является схемой, иллюстрирующей взаимосвязь периодов времени передачи/приема PHICH и/или PDCCH при условии i<k, согласно другому аспекту настоящего изобретения;
[24] Фиг. 11 является блок-схемой последовательности операций, иллюстрирующей процедуру UE в способе HARQ, согласно другому варианту осуществления настоящего изобретения;
[25] Фиг. 12 является схемой, иллюстрирующей взаимосвязь периодов времени между PHICH/PDCCH и/или физическим совместно используемым каналом восходящей линии связи (PUSCH) при условии i>k, согласно варианту осуществления настоящего изобретения;
[26] Фиг. 13 является схемой, иллюстрирующей взаимосвязь периодов времени между PHICH/PDCCH и/или PUSCH при условии i>k, согласно другому варианту осуществления настоящего изобретения;
[27] Фиг. 14 является блок-схемой последовательности операций, иллюстрирующей процедуру eNB в способе HARQ, согласно варианту осуществления настоящего изобретения;
[28] Фиг. 15 является блок-схемой последовательности операций, иллюстрирующей процедуру UE в способе HARQ, согласно варианту осуществления настоящего изобретения;
[29] Фиг. 16 является схемой, иллюстрирующей взаимосвязь периодов времени передачи/приема PDCCH и/или PUSCH при условии i>k, согласно варианту осуществления настоящего изобретения;
[30] Фиг. 17 является схемой, иллюстрирующей взаимосвязь периодов времени передачи/приема PDCCH и/или PUSCH при условии i>k, согласно другому варианту осуществления настоящего изобретения.
[31] Фиг. 18 является блок-схемой, иллюстрирующей конфигурацию eNB, согласно варианту осуществления настоящего изобретения;
[32] Фиг. 19 является блок-схемой, иллюстрирующей конфигурацию UE, согласно варианту осуществления настоящего изобретения;
[33] Фиг. 20 является блок-схемой последовательности операций, иллюстрирующей часть процедуры первого приемо-передающего устройства в способе HARQ, согласно варианту осуществления настоящего изобретения;
[34] Фиг. 21 является блок-схемой последовательности операций, иллюстрирующей другую часть процедуры первого приемо-передающего устройства в способе HARQ, согласно варианту осуществления настоящего изобретения;
[35] Фиг. 22 является блок-схемой последовательности операций, иллюстрирующей другую часть процедуры первого приемо-передающего устройства в способе HARQ, согласно варианту осуществления настоящего изобретения;
[36] Фиг. 23 является блок-схемой последовательности операций, иллюстрирующей еще одну другую часть процедуры первого приемо-передающего устройства в способе HARQ, согласно варианту осуществления настоящего изобретения;
[37] Фиг. 24 является блок-схемой последовательности операций, иллюстрирующей часть процедуры второго приемо-передающего устройства в способе HARQ, согласно варианту осуществления настоящего изобретения;
[38] Фиг. 25 является блок-схемой последовательности операций, иллюстрирующей другую часть процедуры второго приемо-передающего устройства в способе HARQ, согласно варианту осуществления настоящего изобретения;
[39] Фиг. 26 является блок-схемой последовательности операций, иллюстрирующей другую часть процедуры второго приемо-передающего устройства в способе HARQ, согласно варианту осуществления настоящего изобретения;
[40] Фиг. 27 является блок-схемой последовательности операций, иллюстрирующей еще одну другую часть процедуры второго приемо-передающего устройства в способе HARQ, согласно варианту осуществления настоящего изобретения;
[41] Фиг. 28 является схемой, иллюстрирующей первый и второй периоды времени, согласно варианту осуществления настоящего изобретения;
[42] Фиг. 29 является блок-схемой последовательности операций, иллюстрирующей процедуру eNB в способе HARQ, согласно варианту осуществления настоящего изобретения; и
[43] Фиг. 30 является блок-схемой последовательности операций, иллюстрирующей процедуру UE в способе HARQ, согласно варианту осуществления настоящего изобретения.
ОПТИМАЛЬНЫЙ РЕЖИМ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[44] Варианты осуществления настоящего изобретения подробно описываются со ссылками на прилагаемые чертежи. Идентичные или аналогичные компоненты могут обозначаться посредством идентичных или аналогичных ссылок с номерами, хотя они иллюстрируются на различных чертежах. Подробные описания конструкций или процессов, известных в данной области техники, могут быть опущены, чтобы не допускать затруднения в понимании предмета настоящего изобретения.
[45] При использовании в данном документе термины "вариант осуществления", "пример", "аспект" и "пояснение примером" не должны быть интерпретированы как означающие то, что конкретный аспект схемы является превосходящим или преимущественным по сравнению с другим аспектом схемы.
[46] Дополнительно, если явно не указано иное, "или" означает включающее "или", а не исключающее "или". Например, выражение "x использует a или b" означает одну из естественных включающих перестановок.
[47] Кроме того, единственное число в отношении элемента или компонента изобретения предназначено быть неограничивающим в отношении числа случаев (т.е. вхождений) элемента или компонента. Следовательно, единственное число должно трактоваться как включающее в себя "один" или "по меньшей мере, один", и словоформа в единственном числе элемента или компонента также включает в себя множественное число, если только число явно не означает единственное число.
[48] При использовании в данном документе термин "и/или" включает в себя все без исключения комбинации одного или нескольких ассоциативно связанных перечисленных элементов.
[49] При использовании в данном документе термины "включает в себя", "включающий в себя", "имеет", "имеющий", "содержит" или "содержащий" либо любая другая их разновидность имеют намерение охватывать неисключающее включение. Например, состав, сочетание, процесс, способ, изделие или устройство, которое содержит список элементов, не обязательно ограничен только этими элементами, а может включать в себя другие элементы, не перечисленные в явном виде или внутренне присущие такому составу, сочетанию, процессу, способу, изделию или устройству.
[50] Хотя термины "первый", "второй" и т.д. могут быть использованы в данном документе для того, чтобы описывать различные элементы, эти элементы не должны быть ограничены посредством этих терминов. Эти термины используются только для того, чтобы отличать один элемент от другого, а не задают порядок или приоритет.
[51] Согласно варианту осуществления настоящего изобретения приемо-передающее устройство включается в систему связи и выполнено с возможностью передачи и/или приема сигнала и/или данных. Например, приемо-передающее устройство может быть терминалом, базовой станцией или сетевым объектом. Сигнал и/или данные могут включать в себя обучающий символ, управляющий сигнал, управляющую информацию, трафик, дополнение битами и т.п. Система связи, включающая в себя приемо-передающее устройство, не ограничивается конкретным форматом сигналов и/или конкретным протоколом согласно модуляции/демодуляции данных, а может использовать различные форматы сигналов и/или различные протоколы. Например, система связи может включать в себя системы на основе стандарта IEEE 802.16, стандарта общемировой совместимости широкополосного беспроводного доступа (WiMax) и LTE-стандарта. Базовая станция отвечает за выделение ресурсов для терминалов и может представлять собой одно из модуля радиодоступа, контроллера базовой станции и узла сети. Терминал может включать в себя сотовый телефон, смартфон, компьютер и мультимедийную систему, имеющую функцию связи. Хотя варианты осуществления настоящего изобретения направлены на усовершенствованную систему на основе усовершенствованного наземного радиодоступа по стандарту универсальной системы мобильной связи (UMTS) (E-UTRA) (или LTE-A), поддерживающую систему с агрегированием несущих, варианты осуществления настоящего изобретения могут применяться к другим системам, имеющим аналогичный уровень техники и/или формат канала. Кроме того, специалисты в данной области техники должны понимать, что настоящее изобретение может применяться к другим системам связи, с небольшой модификацией, без отступления от сущности и объема настоящего изобретения. Например, способ и устройство HARQ могут применяться к HSPA-системе, поддерживающей агрегирование несущих.
[52] Когда TDD-система связи, предоставляющая широкополосные услуги с агрегированием несущих, поддерживает перекрестную диспетчеризацию несущих, приемо-передающее устройство и/или система, согласно варианту осуществления настоящего изобретения, должна управлять периодами времени передачи/приема подтверждения приема HARQ и/или информации диспетчеризации и данных восходящей линии связи после перекрестной диспетчеризации несущих.
[53] В TDD-системе связи и/или приемо-передающем устройстве согласно варианту осуществления настоящего изобретения взаимосвязь периодов времени передачи/приема данных восходящей линии связи (т.е. PUSCH), подвергнутых перекрестной диспетчеризации несущих на второй несущей согласно информации диспетчеризации (т.е. PDCCH) на первой несущей согласно комбинации конфигурации нисходящей-восходящей линии связи TDD, имеющей агрегированные несущие, или подтверждению приема HARQ (т.е. PHICH) первой несущей, соответствующей PUSCH, подвергнутому перекрестной диспетчеризации несущих на второй несущей.
[54] В LTE-A-системе, поддерживающей агрегирование несущих, если компонентная несущая, переносящая PDCCH, включающий в себя управляющую информацию нисходящей линии связи (DCI) для поддержки передачи данных, и компонентная несущая, переносящая данные, диспетчеризованные на PDCCH, отличаются друг от друга, это упоминается как перекрестная диспетчеризация несущих.
[55] При операции перекрестной диспетчеризации несущих компонентная несущая, переносящая PDCCH, включающий в себя DCI, упоминается как "первая компонентная несущая", в то время как компонентная несущая, на которой выполняется диспетчеризация посредством PDCCH, упоминается как "вторая компонентная несущая". Кроме того, сота, работающая с первой компонентной несущей, упоминается как "первая сота", а сота, работающая со вторым компонентом, упоминается как "вторая сота". Термины "первая компонентная несущая" и "первая сота" используются взаимозаменяемо, и термины "вторая компонентная несущая" и "вторая сота" используются взаимозаменяемо. Кроме того, один eNB может иметь первую и вторую соты (или первую и вторую компонентные несущие), либо первый и второй eNB могут иметь первую и вторую соты соответственно.
[56] Приемо-передающее устройство может включать в себя первое приемо-передающее устройство и/или второе приемо-передающее устройство. Например, первое приемо-передающее устройство может представлять собой eNB, и второе приемо-передающее устройство может представлять собой UE. Согласно варианту осуществления настоящего изобретения приемо-передающее устройство может поддерживать HARQ. HARQ может применяться к передаче данных по восходящей линии связи UE. HARQ для передачи данных по восходящей линии связи UE подробнее описывается ниже согласно варианту осуществления настоящего изобретения. Хотя не описано, HARQ может применяться к передаче данных по нисходящей линии связи eNB.
[57] eNB может конфигурировать и передавать физический совместно используемый канал нисходящей линии связи (PDSCH) посредством отражения свойств передачи. eNB может уведомлять UE относительно свойств передачи, применяемых к PDSCH, через PDCCH. eNB может передавать, в UE, информацию диспетчеризации в восходящей линии связи и информацию свойств передачи по восходящей линии связи через PDCCH. Если PDCCH принимается, UE может конфигурировать и передавать PUSCH посредством отражения свойств передачи, рекомендуемых посредством eNB.
[58] В системе радиосвязи, применяющей HARQ, приемное устройство может повышать производительность приема посредством комбинирования повторно передаваемого сигнала с ранее принимаемыми сигналами. Приемное устройство может сохранять ранее принятые, но приведшие к сбою при декодировании данные с учетом повторной передачи.
[59] HARQ-процесс может быть задан таким образом, чтобы давать возможность передающему устройству передавать новые данные в течение длительного времени перед приемом сигнала ответа, такого как ACK или NACK. Приемное устройство может определять то, какой ранее принимаемый сигнал должен быть комбинирован с повторно передаваемым сигналом, на основе идентификатора HARQ-процесса (HARQ PID). HARQ-процесс может классифицироваться на один из синхронного HARQ-режима и асинхронного HARQ-режима в зависимости от того, уведомляет ли передающее устройство приемное устройство относительно HARQ PID через передачу управляющих служебных сигналов. В синхронном HARQ-режиме порядковый номер или индекс субкадра, переносящего PDCCH, может быть использован для того, чтобы идентифицировать HARQ-процесс, вместо HARQ PID. Субкадр является единицей выделения ресурсов во временной области.
[60] Если необходимо изменять свойства передачи PUSCH, к примеру, ресурс передачи PUSCH и схему модуляции и кодирования для повторной передачи, eNB может передавать PDCCH, чтобы указывать это изменение. HARQ, свойства передачи которого могут быть изменены, упоминается как адаптивный синхронный HARQ. В случае адаптивного синхронного HARQ, PDCCH может быть передан вместе с PHICH для сообщения свойств передачи, таких как схема предварительного кодирования UE.
[61] Согласно варианту осуществления настоящего изобретения система связи может иметь, по меньшей мере, две соты. Например, по меньшей мере, две соты могут включать в себя первую соту и вторую соту, которые используют первую и вторую компонентные несущие, соответственно. Система связи также может поддерживать агрегирование несущих для одновременного использования первой и второй сот. Агрегирование несущих является технологией, которая повышает скорость передачи данных за счет одновременного использования нескольких несущих.
[62] Один из важных признаков системы сотовой связи заключается в том, чтобы поддерживать масштабируемую полосу пропускания для предоставления услуг высокоскоростной передачи данных. Например, LTE-система может поддерживать различные полосы пропускания, к примеру, 20/15/5/3/1,4 МГц. Между тем, LTE-A-система может поддерживать передачу на высокой скорости передачи данных по широкой полосе пропускания вплоть до 100 МГц для одного UE с помощью технологии агрегирования несущих (CA). Поставщики услуг мобильной связи могут предоставлять свои услуги посредством выбора одной из доступных полос пропускания, и UE может работать с различными характеристиками между минимальной полосой пропускания в 1,4 МГц и полосой пропускания в 20 МГц. Между тем, LTE-A, нацеленный на удовлетворение требованиям усовершенствованного стандарта международной системы мобильной связи (усовершенствованного стандарта IMT), может предоставлять широкополосные услуги на скорости передачи данных вплоть до 100 МГц через агрегирование несущих.
[63] Чтобы поддерживать передачу согласно стандарту высокоскоростной передачи данных, LTE-A-система требует полосы пропускания, которая шире полосы пропускания LTE-системы, при сохранении обратной совместимости с унаследованными системами для поддержки LTE UE. Для обратной совместимости полоса пропускания системы для LTE-A-системы разделяется на множество подполос частот или компонентных несущих (CC), которые могут использоваться для передачи/приема LTE UE и которые могут быть агрегированы для передачи согласно стандарту высокоскоростной передачи данных LTE-A-системы с помощью процесса передачи/приема унаследованной LTE-системы для каждой компонентной несущей. Типично, информация диспетчеризации для данных, которые должны быть переданы на компонентных несущих, передается в UE в DCI. DCI может быть задана в различных форматах, и один из предварительно заданных DCI-форматов может быть использован согласно тому, связана ли информация диспетчеризации с восходящей линией связи или нисходящей линией связи, является ли DCI компактной DCI, применяется ли пространственное мультиплексирование с несколькими антеннами и представляет ли собой DCI DCI для управления мощностью.
[64] Например, DCI-формат 0, переносящий управляющую информацию по данным восходящей линии связи, передаваемым без применения технологии со многими входами и многими выходами (MIMO), может включать в себя следующую управляющую информацию.
[65] - Флаг формата 0/формата 1A: отличает между DCI-форматом 0 и DCI-форматом 1A.
[66] - Флаг перескока частот: указывает то, применяется ли перескок частот для PUSCH в качестве канала UL-данных.
[67] - Флаг типа 0/1 выделения ресурсов: отличает между типом 0 выделения ресурсов и типом 1 выделения ресурсов. Тип 0 выделяет ресурс в единице группы блоков ресурсов (RBG) с использованием формата битовой карты. В LTE/LTE-A-системе единицей ресурсов для диспетчеризации является блок ресурсов (RB), представляющий область временных и частотных ресурсов, и RBG может состоять из множества RB. RBG может быть базовой единицей ресурса для диспетчеризации в типе 0. В типе 1 конкретный RB может выделяться в RBG.
[68] Назначение блоков ресурсов: указывает блоки ресурсов, которые должны назначаться UE. Базовой единицей выделения радиоресурсов является RB, представляющий временную и частотную область.
[69] - Схема модуляции и кодирования и резервная версия: указывает схему модуляции и скорость кодирования, используемые при передаче данных, и резервную версию HARQ.
[70] - Индикатор новых данных (NDI): указывает то, является пакет новой передачей или повторной передачей.
[71] - TPC-команда для PUSCH: указывает команду управления мощностью передачи для PUSCH.
[72] - Циклический сдвиг для DM RS: указывает циклический сдвиг, который следует использовать для извлечения опорного сигнала демодуляции в восходящей линии связи из базовой последовательности.
[73] - Запрос индикатора качества канала (CQI): запрашивает UE на предмет отправки CQI.
[74] DCI канально кодируется и модулируется и затем передается на PDCCH.
[75]
[76] Фиг. 1 является схемой, иллюстрирующей агрегирование несущих для компонентных несущих в LTE-A-системе, согласно варианту осуществления настоящего изобретения. Каждая из двух несущих может включать в себя длительности нисходящей линии связи и/или восходящей линии связи, и фиг. 1 иллюстрирует диспетчеризацию UE для передачи по восходящей линии связи на двух компонентных несущих.
[77] На фиг. 1 DCI 101, передаваемая в m-том субкадре первой компонентной несущей (CC#1) 109, может канально кодироваться и перемежаться, чтобы формировать PDCCH 103 в предварительно определенном формате, заданном в LTE-стандарте. DCI 101 также может быть информацией, включенной в PDCCH 103. Субкадр может быть базовой единицей времени диспетчеризации в LTE- и/или LTE-A-системе. PDCCH 103 может включать в себя информацию диспетчеризации для PUSCH 113 в качестве канала передачи данных, выделяемого UE в n-ном субкадре (здесь n>m) CC#1 109. DCI 105, передаваемая в m-том субкадре второй компонентной несущей (CC#2) 111, канально кодируется и перемежается, чтобы формировать PDCCH 107, или включается в PDCCH 107. PDCCH 107 является каналом управления, передаваемым из eNB в UE, и может включать в себя информацию диспетчеризации для PUSCH 115 в качестве канала передачи данных восходящей линии связи, выделяемого UE в n-ном субкадре CC#2 111.
[78] В LTE-A-системе, поддерживающей агрегирование несущих, данные и/или DCI для поддержки передачи данных могут быть переданы для каждой компонентной несущей, как показано на фиг. 1.
[79] Когда PUSCH передает данные на каждой компонентной несущей, можно преодолевать влияние помех на передачу/прием PUSCH с использованием частотно-избирательной диспетчеризации и/или HARQ. Тем не менее, HARQ не применяется к передаче PDCCH, переносящего DCI, и PDCCH передается по всей полосе частот системы, так что частотно-избирательная диспетчеризация не может применяться, что приводит к необходимости способа передачи DCI с учетом помех.
[80] Чтобы повышать надежность приема DCI, может быть изменена компонентная несущая, переносящая DCI, либо различные компонентные несущие используются для передачи DCI и данных. Это может упоминаться как перекрестная диспетчеризация несущих. Например, если затруднительно ожидать надежности приема DCI вследствие увеличения помех на CC#2 111 на фиг. 1, компонентная несущая для передачи DCI может быть переключена с CC#2 в CC#1, на которую оказывают относительно меньшее влияние помехи.
[81] Ниже предоставляется подробное описание перекрестной диспетчеризации несущих относительно фиг. 2.
[82] Фиг. 2 является схемой, иллюстрирующей перекрестную диспетчеризацию несущих в LTE-A-системе, поддерживающей агрегирование несущих, согласно варианту осуществления настоящего изобретения. Фиг. 2 показывает операцию перекрестной диспетчеризации для LTE-A UE, работающего с двумя агрегированными несущими восходящей линии связи и двумя агрегированными несущими нисходящей линии связи.
[83] Поскольку помехи в нисходящей линии связи на CC#2 219 превышают помехи в нисходящей линии связи на CC#1 209, затруднительно ожидать удовлетворительную производительность приема DCI в качестве информации диспетчеризации для передачи данных по восходящей линии связи UE на CC#2 219. В этом случае eNB может передавать DCI на CC#1 209. eNB может передавать индикатор несущей (CI), указывающий компонентную несущую, на которой DCI указывает информацию выделения ресурсов и/или формат передачи диспетчеризованных данных. Например, CI="00" указывает информацию диспетчеризации для CC#1 209, а CI="01" указывает CC#2 219.
[84] eNB может комбинировать DCI 201, указывающую информацию выделения ресурсов и/или формат передачи для данных 207 (т.е. PUSCH), диспетчеризованных в n-ном субкадре 220 CC#1, 209 и CI 202, чтобы формировать расширенную DCI, и выполняет канальное кодирование для расширенной DCI, как обозначено посредством ссылки с номером 203. eNB формирует PDCCH посредством модуляции и перемежения для канально кодированной DCI и преобразует PDCCH в PDCCH-область 205 в m-том субкадре 210 CC#1 209. eNB также может комбинировать DCI 211, указывающую выделение ресурсов и/или формат передачи данных 217 (т.е. PUSCH), и CI 212, чтобы формировать расширенную DCI, и выполняет канальное кодирование для расширенной DCI, как обозначено посредством ссылки с номером 213. eNB формирует PDCCH посредством модуляции и перемежения для канально кодированной DCI и преобразует PDCCH в PDCCH-область 205 в m-том субкадре 210 CC#1 209.
[85] Агрегирование несущих может классифицироваться на одну из следующих категорий согласно сценариям реализации. Первая и вторая соты могут иметь практически идентичное по размеру покрытие и перекрываться друг с другом. В это время eNB может работать в первой и второй сотах с помощью совместно используемых антенн, либо антенны могут размещаться близко. В варианте осуществления настоящего изобретения вторая сота имеет большее покрытие, чем первая сота, и их антенна(ы) ориентированы практически в идентичном направлении. Первая сота обеспечивает достаточное покрытие, в то время как вторая сота обеспечивает достаточную скорость передачи данных. Кроме того, когда две соты совместно используют идентичную антенну(ы) и развертываются близко, антенны двух сот ориентированы в различных направлениях. Можно гарантировать повышенную скорость передачи данных для UE на границе соты, на которой две соты перекрываются. Кроме того, первая сота может отвечать за макрозону, в то время как вторая сота может отвечать за публичную точку доступа в макрозоне первой соты. Дополнительная антенна может быть развернута в публичной точке доступа второй соты.
[86] Вторая сота может быть диспетчеризована посредством первой соты. В варианте осуществления настоящего изобретения, в котором UE передает данные восходящей линии связи в eNB в субкадре второй соты, eNB может передавать подтверждение приема HARQ, соответствующее данным восходящей линии связи, и/или информацию диспетчеризации для передаваемых (или повторно передаваемых) данных. Вторая сота может работать, по меньшей мере, с одним субкадром, к которому неявно применяется синхронный HARQ для идентификации длительности для передачи (или повторной передачи) данных по восходящей линии связи UE.
[87] Первая и вторая соты могут работать в различных конфигурациях TDD. Конфигурация TDD может включать в себя информацию относительно компоновки субкадров восходящей и нисходящей линий связи, используемых в соте. В частности, конфигурация TDD включает в себя информацию выделения ресурсов восходящей линии связи и нисходящей линии связи и шаблон восходящей линии связи и нисходящей линии связи в радиокадре.
[88] В LTE-системе сота работает в одной из конфигураций TDD 0-6, перечисленных в таблице 1.
[89] В TDD-системе связь в нисходящей линии связи и восходящей линии связи совместно использует идентичную частоту, так что сигналы восходящей линии связи и нисходящей линии связи отличаются во временной области. В LTE TDD-системе сигналы восходящей линии связи и нисходящей линии связи отличаются друг от друга в единицах субкадров. В TDD-системе число субкадров нисходящей линии связи может быть равно, больше или меньше числа субкадров восходящей линии связи согласно нагрузке по трафику. В LTE-системе субкадр имеет длину в 1 мс и 10 субкадров формируют радиокадр.
[90]
Конфи-
гурация TDD
[91] Таблица 1 показывает конфигурацию TDD (конфигурацию нисходящей-восходящей линии связи TDD), заданную в LTE-стандарте. В таблице 1 номера 0-9 субкадров указывают индексы субкадров, составляющих один радиокадр. Здесь, "D" обозначает субкадр, зарезервированный для передачи по нисходящей линии связи, "U" обозначает субкадр, зарезервированный для передачи по восходящей линии связи, и "S" обозначает специальный субкадр. Специальный субкадр состоит из пилотного временного слота нисходящей линии связи (DwPTS), защитного периода (GP) и пилотного временного слота восходящей линии связи (UpPTS). DwPTS имеет небольшую длительность по сравнению с обычным субкадром и может осуществлять функцию обычного субкадра нисходящей линии связи. Например, DwPTS может использоваться для передачи управляющей информации в нисходящей линии связи или данных нисходящей линии связи, в частности, когда его длина является достаточно большой согласно конфигурации специального субкадра. Соответственно, специальный субкадр может иметь длительность для передачи подтверждения приема HARQ и/или информации диспетчеризации аналогично обычному субкадру нисходящей линии связи. GP является интервалом, требуемым для переключения с нисходящей линии связи на восходящую линию связи, и его длина определяется согласно конфигурации сети. UpPTS может использоваться для передачи зондирующего опорного сигнала (SRS) UE для оценки состояния каналов восходящей линии связи и канала с произвольным доступом (RACH) UE.
[92] В случае конфигурации #6 нисходящей-восходящей линии связи TDD eNB может передавать данные и/или управляющую информацию нисходящей линии связи в субкадрах #0, #5 и #9 и данные и управляющую информацию восходящей линии связи в субкадрах #2, #3, #4, #7 и #8. Здесь # указывает номер или индекс. Субкадры #1 и #6, в качестве специальных субкадров, могут использоваться для передачи управляющей информации нисходящей линии связи и/или данных нисходящей линии связи избирательно и SRS или RACH в восходящей линии связи.
[93] Поскольку передача по нисходящей линии связи или по восходящей линии связи разрешается для конкретной длительности в TDD-системе, необходимо задавать взаимосвязь периодов времени между физическими каналами восходящей линии связи и нисходящей линии связи, такими как канал управления для диспетчеризации данных, канал передачи диспетчеризованных данных и HARQ ACK/NACK-канал (подтверждение приема HARQ), соответствующий каналу передачи данных.
[94] Например, LTE- и/или LTE-A-система применяет синхронный HARQ, имеющий фиксированный период времени передачи данных в восходящей линии связи. Взаимосвязь периодов времени восходящей/нисходящей линии связи между PUSCH для передачи данных по восходящей линии связи, PDCCH в качестве канала управления, идущего после PUSCH, и PHICH в качестве физического канала, переносящего HARQ ACK/NACK нисходящей линии связи, соответствующее PUSCH, может конфигурироваться так, как показано в таблицах 2 и 3.
[95] Если PDCCH, включающий в себя DCI-формат 0 в качестве информации диспетчеризации в восходящей линии связи, передается посредством eNB в n-ном субкадре, или PHICH (или подтверждение приема HARQ), переносящий HARQ ACK/NACK, передается посредством eNB, UE может передавать PUSCH, переносящий данные восходящей линии связи, соответствующие PDCCH, либо подтверждение приема HARQ в (n+k)-том субкадре. В это время k может быть одним из значений, заданных в конфигурациях, показанных в таблице 2.
[96]
[97] Если PHICH, переносящий HARQ ACK/NACK нисходящей линии связи, принимается из eNB в i-том субкадре, PHICH может соответствовать PUSCH, передаваемому посредством UE в (i-k)-том субкадре. Здесь k может быть одним из значений, заданных в конфигурациях, показанных в таблице 3.
[98]
[99] В LTE TDD-системе с использованием конфигураций из таблиц 2 и 3 субкадр нисходящей линии связи не задается для длительности передачи PHICH. В случае конфигурации #1 нисходящей-восходящей линии связи TDD субкадры #0 и #5 являются субкадрами нисходящей линии связи, но не имеют задания для длительности передачи PHICH. Это обусловлено тем, что необходимо задавать всего до 4 субкадров для PHICH, что соответствует общему числу в 4 субкадра восходящей линии связи из 10 субкадров, составляющих один радиокадр в конфигурации #1 нисходящей-восходящей линии связи TDD. Соответственно, нет необходимости задавать передачу PHICH в субкадрах #0 и #5.
[100] Фиг. 3 является схемой, иллюстрирующей взаимосвязь периодов времени передачи/приема LTE-системы, работающей в конфигурации #1 нисходящей-восходящей линии связи TDD, согласно варианту осуществления настоящего изобретения. Фиг. 3 показывает субкадры восходящей линии связи, переносящие восходящую линию связи PUSCH, соответствующего PDCCH или PHICH, и субкадры нисходящей линии связи, переносящие PHICH, соответствующий PUSCH, когда PDCCH или PHICH передается в восходящей линии связи, или специальный субкадр в системе, работающей в конфигурации #1 нисходящей-восходящей линии связи TDD. UE может передавать PUSCH 303 восходящей линии связи в субкадре #7 (i+1)-го радиокадра в соответствии с PDCCH или PHICH 301, передаваемым посредством eNB в субкадре #1 i-того радиокадра. Кроме того, eNB может передавать PHICH 305, соответствующий PUSCH 303, в UE в субкадре #1 (i+1)-го радиокадра. Кроме того, UE может передавать PUSCH 309 восходящей линии связи в субкадре #2 (i+1)-го радиокадра в соответствии с PDCCH или PHICH 307, передаваемым посредством eNB в субкадре #6 i-того радиокадра. eNB может передавать PHICH 311, соответствующий PUSCH 309, в UE в субкадре #6 (i+1)-го радиокадра.
[101] В TDD-системе, поскольку PDCCH, соответствующий PUSCH или передаче по нисходящей линии связи PHICH, ограничивается конкретными субкадрами нисходящей линии связи, можно уменьшать время обработки передачи/приема eNB и/или UE. Например, в случае конфигурации #1 нисходящей-восходящей линии связи TDD с фиг. 3 пропускается передача PDCCH для диспетчеризации PUSCH или PHICH, соответствующего PUSCH, в субкадрах #0 и #5.
[102] Когда агрегирование несущих применяется к LTE-A-системе вместе с взаимосвязью периодов времени между физическими каналами LTE TDD-системы, необходимо задавать дополнительную взаимосвязь периодов времени и/или операции в дополнение к традиционной взаимосвязи периодов времени. В частности, если конфигурации нисходящей-восходящей линии связи TDD для агрегированных несущих отличаются друг от друга и если применяется перекрестная диспетчеризация несущих, необходимо задавать взаимосвязь периодов времени между PUSCH, подвергнутым перекрестной диспетчеризации несущих посредством PDCCH, PUSCH после перекрестной диспетчеризации несущих и PHICH.
[103] В системе, поддерживающей агрегирование несущих, конфигурация нисходящей-восходящей линии связи TDD может быть выбрана для каждой компонентной несущей согласно сценарию организации системы. Например, eNB (или система) конфигурирует субкадры восходящей и нисходящей линии связи равномерно на первой компонентной несущей, при этом она конфигурирует больше субкадров нисходящей линии связи, чем субкадров нисходящей линии связи, на второй компонентной несущей, чтобы расширять пропускную способность нисходящей линии связи. Кроме того, eNB (или система) может работать в конфигурации нисходящей-восходящей линии связи TDD на первой компонентной несущей с учетом совместимости с TD-SCDMA-системой в качестве традиционной 3G TDD-системы, чтобы подавлять помехи между TD-SCDMA-системой и LTE TDD-системой. eNB (или система) может выбирать конфигурацию нисходящей-восходящей линии связи TDD для второй компонентной несущей согласно нагрузке по трафику без других ограничений. Межсотовые помехи могут быть минимизированы посредством агрегирования компонентных несущих, не последовательных в частотной области.
[104] Фиг. 4 является блок-схемой последовательности операций, иллюстрирующей способ для eNB и/или UE, чтобы проверять период времени передачи/приема, согласно варианту осуществления настоящего изобретения. В процедуре по фиг. 4, как eNB, так и UE воспринимают взаимосвязь периодов времени между PDCCH и PUSCH, диспетчеризованным посредством PDCCH и PHICH. Процедура по фиг. 4 может обычно применяться к eNB и UE.
[105] eNB или UE проверяет то, активировано ли агрегирование несущих, на этапе 410.
[106] Если агрегирование несущих не активировано, eNB или UE работают согласно периоду времени PDCCH/PUSCH/PHICH, заданному в конфигурации нисходящей-восходящей линии связи TDD системы (например, LTE/LTE-A), на этапе 420.
[107] Если агрегирование несущих активировано, eNB или UE сравнивает конфигурации нисходящей-восходящей линии связи TDD для агрегированных компонентных несущих друг с другом на этапе 430. Если определено то, что конфигурации нисходящей-восходящей линии связи TDD являются идентичными друг с другом, технология переходит к этапу 420.
[108] В противном случае, если определено то, что конфигурации нисходящей-восходящей линии связи TDD отличаются друг от друга, eNB или UE определяет то, активирована ли перекрестная диспетчеризация несущих, на этапе 440. Если определено то, что перекрестная диспетчеризация несущих не активирована, на этапе 440, технология переходит к этапу 420.
[109] Если определено то, что перекрестная диспетчеризация несущих активирована, на этапе 440, eNB или UE применяет предложенный период времени передачи/приема, согласно аспекту на основе взаимосвязи между k-тым субкадром, переносящим PDCCH, соответствующий PUSCH, который должен диспетчеризоваться, и i-тым субкадром, переносящим PHICH, соответствующий PUSCH, на этапе 450.
[110] Согласно варианту осуществления настоящего изобретения период времени передачи посредством eNB PDCCH, включающего в себя информацию перекрестной диспетчеризации несущих для PUSCH, может быть k-тым субкадром, т.е. самым первым (или самым последним) субкадром нисходящей линии связи, появляющимся с периода времени передачи PUSCH UE из субкадров на первой компонентной несущей, который находится, по меньшей мере, за j субкадров до периода времени передачи PUSCH UE. Здесь j и k являются целыми числами, и j может быть значением для гарантирования минимального времени обработки сигналов в UE или значением, заданным с учетом временной задержки на передачу/прием сигналов и/или задержки при декодировании. Например, j может указывать четыре субкадра. При условии j временной интервал между PDCCH и PUSCH может составлять, по меньшей мере, j субкадров, и эффективность диспетчеризации eNB может быть повышена посредством поддержания наименьшего интервала.
[111] Если PUSCH принимается из UE, eNB определяет то, следует ли передавать ACK или NACK, и возвращает PHICH, переносящий HARQ ACK/NACK, в UE. eNB может передавать PHICH в i-том субкадре, т.е. в самом первом субкадре нисходящей линии связи, появляющимся, по меньшей мере, после j субкадров на первой компонентной несущей, начиная с субкадра, в котором принят PUSCH. I-тый субкадр может иметь длительность, доступную для передачи подтверждения приема HARQ, соответствующего PUSCH. Здесь i является целым числом. eNB может обеспечивать минимальное время обработки сигналов при условии j в период времени передачи PHICH, соответствующего PUSCH. Минимальное время обработки сигналов eNB может задаваться равным значению, отличному от j, с учетом минимального времени обработки сигналов UE.
[112] Если определяется передача NACK в соответствии с PUSCH, принимаемым из UE, eNB может передавать PDCCH для диспетчеризации повторной передачи PUSCH вместе с PHICH, так что UE повторно передает PUSCH. В дальнейшем в этом документе, повторная передача PUSCH, инициированная посредством передачи PDCCH в UE вместе с PHICH, упоминается как адаптивная повторная передача или повторная передача. eNB может конфигурировать или переконфигурировать радиоресурс и/или MCS для повторной передачи PUSCH посредством передачи PDCCH. PDCCH для диспетчеризации повторной передачи PUSCH может быть передан в k-том субкадре, т.е.
[113] в субкадре нисходящей линии связи, на первой компонентной несущей. Когда принимаются как PHICH, так и PDCCH для адаптивной повторной передачи, UE может выполнять повторную передачу на основе информации PDCCH.
[114] В системе, поддерживающей агрегирование несущих и перекрестную диспетчеризацию несущих согласно варианту осуществления настоящего изобретения, взаимосвязь периодов времени передачи/приема может включать в себя следующие случаи согласно результату сравнения между i и k.
[115] Если период времени передачи PHICH UE (т.е. i) и период времени передачи PDCCH для повторной передачи PUSCH (т.е. k) являются идентичными друг другу (т.е. i=k), на этапе 450, eNB и/или UE может идентифицировать взаимосвязь периодов времени PDCCH/PUSCH/PHICH.
[116] Если период времени передачи PHICH находится раньше периода времени передачи PDCCH для повторной передачи PUSCH, т.е. i<k, на этапе 450, eNB или UE может идентифицировать взаимосвязь периодов времени PDCCH/PUSCH/PHICH в соответствии с фиг. 5-11. Если период времени передачи PHICH находится позже периода времени передачи PDCCH для повторной передачи PUSCH, т.е. i>k, eNB или UE может идентифицировать взаимосвязь периодов времени PDCCH/PUSCH/PHICH в соответствии с фиг. 12-17.
[117] Поскольку конфигурации TDD, доступные для каждой из первой и второй сот, составляют 7, число доступных комбинаций конфигураций TDD становится равным 49. Когда синхронный HARQ применяется для данных восходящей линии связи (т.е. PUSCH), UE и/или eNB может проверять длительность для передачи или повторной передачи данных по восходящей линии связи. Чтобы поддерживать синхронный HARQ восходящей линии связи, UE и/или eNB должны иметь возможность определять или знать период времени передачи посредством eNB подтверждения приема HARQ и/или информации диспетчеризации для данных восходящей линии связи. Подтверждение приема HARQ может включать в себя PHICH, в то время как информация диспетчеризации передачи по восходящей линии связи может быть включена в PDCCH. Когда адаптивный синхронный HARQ применяется в системе, могут передаваться как PHICH, так и PDCCH.
[118] Приводится описание способа для идентификации длительности переноса подтверждения приема HARQ и/или информации диспетчеризации в восходящей линии связи в UE и/или eNB.
[119] Из комбинаций конфигураций TDD, может быть предусмотрено 7 комбинаций, в которых конфигурации TDD первой и второй сот являются идентичными друг с другом. В этом случае информация диспетчеризации для длительности (или номера субкадра) для передачи подтверждения приема HARQ, соответствующего субкадру передачи данных по восходящей линии связи UE, и/или длительности (или номера субкадра) для передачи информации диспетчеризации для передачи (или повторной передачи) данных может быть использована идентично. Когда предварительно определенная информация о периодах времени включается в конфигурации TDD 0-6, как показано в таблице 1, передача (или повторная передача) данных восходящей линии связи UE (т.е. PUSCH) выполняется в предварительно определенном субкадре восходящей линии связи на второй соте согласно предварительно определенной информации о периодах времени и подтверждению приема HARQ eNB (т.е. PHICH), передача, соответствующая данным восходящей линии связи UE, может быть выполнена в предварительно определенном субкадре первой соты, согласно предварительно определенной информации о периодах времени. Информация диспетчеризации (например, PDCCH) может быть передана в субкадре, переносящем подтверждение приема HARQ. В частности, когда конфигурации TDD первой и второй сот являются идентичными друг с другом, eNB и/или UE может определять или идентифицировать использование предварительно определенной информации о периодах времени для каждой соты.
[120] Из комбинаций конфигураций TDD может быть предусмотрено 42 комбинации, в которых конфигурации TDD первой и второй сот отличаются друг от друга. UE может передавать данные (т.е. PUSCH) в eNB в первом субкадре во второй соте. В случае синхронного HARQ, eNB и/или UE может идентифицировать второй субкадр в качестве самой первой длительности, доступной для передачи (или повторной передачи) данных UE, который появляется после первого субкадра второй соты. В частности, второй субкадр может иметь самую первую длительность, доступную для передачи (повторной передачи) данных UE после первого субкадра второй соты. Когда агрегирование несущих деактивировано, второй субкадр может быть идентичным с длительностью, идентифицированной посредством UE и/или eNB в системе, имеющей только вторую соту и работающей в синхронном HARQ.
[121] eNB может принимать данные (т.е. PUSCH), передаваемые посредством UE в первом субкадре второй соты. eNB может передавать, в UE, подтверждение приема HARQ, соответствующее первому субкадру, и/или информацию диспетчеризации для второго субкадра в одном (или, по меньшей мере, в одном) из субкадров первой соты в течение длительности между первым и вторым субкадрами.
[122] Здесь субкадры первой соты в течение длительности между первым и вторым субкадрами могут включать в себя i-тый субкадр и k-тый субкадр. Здесь i и k являются целыми числами. I-тый субкадр может иметь длительность, доступную для передачи подтверждения приема HARQ (т.е. PHICH), соответствующего первому субкадру, после первого субкадра. Например, длительность, доступная для передачи PHICH, может быть длительностью, удовлетворяющей уравнению (1).
[123] Период времени PHICH является самым первым субкадром нисходящей линии связи: i≥t1+4... (1)
[124] В уравнении (1) субкадр i обозначает i-тый субкадр, t1 обозначает первый субкадр и 4 обозначает то, что первая длительность состоит из 4 субкадров. В частности, i-тый субкадр может иметь самую первую длительность нисходящей линии связи, удовлетворяющую условию, что поступает, по меньшей мере, в предварительно определенную первую длительность после первого субкадра. Длительность нисходящей линии связи может включать в себя специальный субкадр, а также субкадры нисходящей линии связи. Предварительно определенная первая длительность может задаваться с учетом задержки при декодировании принимаемого сигнала. Например, первая длительность может быть определена с учетом интервала между периодом времени передачи PUSCH UE и периодом времени приема PUSCH eNB, временем декодирования принимаемого PUSCH и/или временем формирования PHICH согласно результату декодирования.
[125] Способ для определения i-того субкадра в качестве длительности, доступной для передачи PHICH, может быть модифицирован различными способами. Например, этот способ может быть модифицирован посредством отражения дополнительных ограничений в дополнение к уравнению (1). В частности, субкадр нисходящей линии связи, не имеющий задания длительности передачи PHICH в таблице 2 или 3, может вводиться в вычисление i-того субкадра. В противном случае, если i-тый субкадр, вычисленный посредством уравнения (1), является идентичным с субкадром нисходящей линии связи, для которого не задается длительность передачи PHICH, i-тый субкадр заменяется самым первым субкадром нисходящей линии связи, появляющимся после i-того субкадра. LTE UE принимает PDCCH в ресурсе, остающемся после вычитания области ресурсов, по которой передается PHICH. Соответственно, если PHICH передается в субкадре нисходящей линии связи, для которого не задается длительность передачи PHICH, унаследованное UE не может иметь сведения по PHICH и в силу этого выполняет с ошибкой прием PDCCH.
[126] K-тый субкадр может иметь длительность, доступную для eNB, чтобы передавать информацию диспетчеризации (например, PDCCH) для второго субкадра перед вторым субкадром. Длительность, доступная для передачи PDCCH, может быть длительностью, удовлетворяющей уравнению (2).
[127] Период времени PDCCH является самым последним субкадром нисходящей линии связи: k<=t2-4... (2)
[128] В уравнении (2) субкадр k обозначает k-тый субкадр, t2 обозначает второй субкадр и 4 обозначает то, что предварительно определенная вторая длительность состоит из 4 субкадров. В частности, k-тый субкадр может быть самым последним субкадром нисходящей линии связи, удовлетворяющим условию прохождения, по меньшей мере, предварительно определенной второй длительности до второго субкадра. Длительность нисходящей линии связи может включать в себя специальные субкадры, а также обычные субкадры нисходящей линии связи. Предварительно определенная вторая длительность может быть сконфигурирована с учетом задержки при декодировании принимаемого сигнала. Например, предварительно определенная вторая длительность может быть сконфигурирована с учетом интервала между периодом времени передачи PDCCH посредством eNB и периодом времени приема PDCCH UE, временем декодирования принимаемого PDCCH и/или временем формирования PUSCH согласно результату декодирования.
[129] Когда конфигурации TDD первой и второй сот отличаются друг от друга, i-тый субкадр и k-тый субкадр могут быть определены. Ниже предоставляется описание длительности передачи PHICH и/или PDCCH согласно взаимосвязи между i и k. Когда агрегирование несущих активировано, чтобы обеспечивать широкую полосу, система и/или приемо-передающее устройство, поддерживающее конфигурацию TDD, могут работать независимо от числа компонентных несущих согласно варианту осуществления настоящего изобретения.
[130] Когда i равен k (i==k), eNB может передавать PHICH и/или PDCCH в i-том субкадре (или k-том субкадре). После приема PHICH и/или PDCCH из eNB UE может выполнять передачу (или повторную передачу) данных во втором субкадре второй соты согласно управляющей информации, переносимой в PHICH и/или PDCCH.
[131] Когда i меньше k (i<k), eNB может передавать PHICH в i-том субкадре и PDCCH в k-том субкадре. После приема PHICH, передаваемого посредством eNB в i-том субкадре первой соты, и PDCCH, передаваемого посредством eNB в k-том субкадре, UE может выполнять передачу (или повторную передачу) в eNB во втором субкадре согласно информации, переносимой в PHICH и/или PDCCH. UE также может принимать PHICH, передаваемый посредством eNB в i-том субкадре. Когда PDCCH не передается посредством eNB в k-том субкадре, UE может определять то, следует ли повторно передавать данные, на основе подтверждения приема HARQ.
[132] Кроме того, когда i меньше k (i<k), eNB может передавать PHICH и/или PDCCH в i-том субкадре. Кроме того, eNB может передавать PHICH и/или PDCCH в k-том субкадре. В частности, eNB и UE может определять или конфигурировать один из i-того и k-того субкадров в качестве длительности для передачи PHICH и/или PDCCH. После приема PHICH и/или PDCCH, передаваемого посредством eNB в i-том субкадре (или k-том субкадре) первой соты, UE может передавать (или повторно передавать) данные в eNB согласно PHICH и/или PDCCH во втором субкадре второй соты.
[133] Приводится описание взаимосвязи периодов времени между PDCCH, PUSCH и PHICH, когда конфигурации нисходящей-восходящей линии связи TDD для агрегированных компонентных несущих отличаются друг от друга, и перекрестная несущая применяется, и если период времени передачи PHICH, вычисленный так, как описано, находится раньше периода времени передачи PDCCH, т.е. i<k.
[134] Фиг. 5 и 6 являются схемами, иллюстрирующими взаимосвязь периодов времени в случае, если взаимосвязь между вычисленным i-тым субкадром, переносящим PHICH, и k-тым субкадром, переносящим PDCCH для диспетчеризации повторной передачи PUSCH, представляет собой i<k согласно варианту осуществления настоящего изобретения.
[135] На фиг. 5 первая компонентная несущая, на которой PDCCH или PHICH передается для перекрестной диспетчеризации несущих, представляет собой CC1 510, а вторая компонентная несущая, на которой PUSCH подвергнут перекрестной диспетчеризации несущих посредством PUSCH, представляет собой CC2 520. При условии, что период времени начальной передачи PUSCH UE является нулевым субкадром (t1) 530 в случае работы в синхронном HARQ-режиме, имеющем фиксированный период времени передачи данных, период времени повторной передачи PUSCH может быть нулевым субкадром (t2) 560 следующего радиокадра. В случае синхронного HARQ начальная/повторная передача PUSCH может быть выполнена в идентичном кадре различных радиокадров.
[136] Если UE выполняет начальную передачу PUSCH в субкадре, соответствующем t1 530 на CC2 520 согласно диспетчеризации eNB, eNB может передавать PHICH, переносящий ACK/NACK, соответствующее PUSCH в i-том субкадре 540, т.е. субкадре нисходящей линии связи, на CC1 510. Здесь i может быть наибольшим значением, удовлетворяющим взаимосвязи k<t2-j. Например, i-тый субкадр 540 и k-тый субкадр 550 имеют взаимосвязь i≠k, так что периоды времени передачи PHICH и PDCCH отличаются друг от друга, они могут не определять то, следует ли выполнять повторную передачу PUSCH в i-том субкадре 540, переносящем PHICH, а ожидать приема PDCCH в k-том субкадре 550 для подготовки адаптивной повторной передачи.
[137] Согласно варианту осуществления настоящего изобретения период времени передачи PHICH и период времени передачи PDCCH могут быть идентичными друг с другом. Посредством одновременной передачи PHICH и PDCCH можно разрешать неоднозначность повторной передачи UE и неэффективность, вызываемую посредством мониторинга дополнительного сигнала.
[138] Например, eNB может регулировать i-тый субкадр 540 в качестве периода времени передачи PHICH посредством eNB таким образом, что он равен k-тому субкадру 550, т.е. i=k, что приводит к одновременной передаче PHICH и PDCCH для адаптивной повторной передачи. Когда eNB и UE согласуют друг с другом сдвиг позиции i в позицию k, UE может различать между периодами времени передачи PHICH и PDCCH.
[139] На фиг. 6 первая компонентная несущая, на которой передается PDCCH для перекрестной диспетчеризации несущих или PHICH, представляет собой CC1 610, а вторая компонентная несущая, на которой PUSCH подвергнут перекрестной диспетчеризации несущих посредством PDCCH, представляет собой CC2 620. При допущении, что период времени начальной передачи PUSCH UE является нулевым субкадром (t1) 630 при использовании синхронного HARQ, имеющего фиксированный период времени передачи данных в HARQ восходящей линии связи, период времени повторной передачи PUSCH может быть нулевым субкадром (t) 660 следующего радиокадра. При условии, идентичном условию по фиг. 5, eNB может регулировать период времени передачи PHICH от i-того субкадра 640 к k-тому субкадру 650.
[140] Ниже предоставляется описание периодов времени передачи/приема сигналов eNB и UE, поддерживающего HARQ, согласно варианту осуществления настоящего изобретения, со ссылкой на фиг. 7 и 8.
[141] Фиг. 7 является блок-схемой последовательности операций, иллюстрирующей процедуру eNB в способе HARQ, согласно варианту осуществления настоящего изобретения.
[142] eNB определяет то, активирована ли перекрестная диспетчеризация несущих в определенный период времени, на этапе 701. Если перекрестная диспетчеризация несущих не активирована, например, PDCCH для диспетчеризации PUSCH, который должен быть передан на первой компонентной несущей, также передается на первой компонентной несущей, eNB может передавать PDCCH, переносящий DCI для диспетчеризации PUSCH, в UE, на этапе 709.
[143] eNB может принимать PUSCH в период времени приема PUSCH, заданный в унаследованном стандарте связи (например, LTE/LTE-A), через компонентную несущую, на которой передан PDCCH, на этапе 710.
[144] eNB может передавать PHICH или PDCCH для адаптивной повторной передачи на основе результата декодирования PUSCH согласно периоду времени, заданному в унаследованной системе, на этапе 711.
[145] eNB может определять ACK/NACK согласно результату декодирования принимаемого PUSCH, на этапе 712. Если результат декодирования PUSCH указывает ACK, то eNB может диспетчеризовать новые данные или завершать процедуру. Если результат декодирования PUSCH указывает NACK, то eNB может принимать повторную передачу PUSCH посредством возвращения на этап 710.
[146] Если перекрестная диспетчеризация несущих активирована, на этапе 701, eNB может передавать PDCCH в субкадре k0, ближайшем к периоду времени передачи PUSCH UE, из субкадров нисходящей линии связи на первой компонентной несущей, по меньшей мере, за j субкадров от периода времени t1 передачи UE PUCCH на второй компонентной несущей (здесь k0<t1-j), на этапе 702. J может задаваться равным значению, которое обеспечивает наименьшее время обработки сигналов UE. Например, j может задаваться равным 4 (j=4).
[147] eNB может принимать PUSCH на второй компонентной несущей в период времени диспетчеризации, учитываемый при передаче PDCCH для диспетчеризации начальной передачи или повторной передачи PUSCH, на этапе 703.
[148] eNB может определять i-тый субкадр, переносящий PHICH, соответствующий PUSCH, и k-тый субкадр, переносящий PDCCH для диспетчеризации адаптивной повторной передачи PUSCH, на этапе 704. Период времени передачи PHICH может быть i-тым субкадром (субкадром нисходящей линии связи), поступающим первым (самым первым), по меньшей мере, после j субкадров от субкадра, переносящего PUSCH на первой компонентной несущей (здесь, i>t1+j). Кроме того, период времени передачи PDCCH для диспетчеризации адаптивной повторной передачи может быть k-тым субкадром, ближайшим (самым последним) к периоду времени повторной передачи PUSCH UE, из субкадров нисходящей линии связи на первой компонентной несущей, по меньшей мере, за j субкадров от периода времени t2 повторной передачи PUSCH UE (здесь k<t2-j).
[149] Если i<k, eNB может сдвигать фактический период времени передачи PHICH от i-того субкадра к I'-тому субкадру (I'=k), чтобы согласовывать периоды времени передачи PHICH и PDCCH для адаптивной повторной передачи, на этапе 705.
[150] eNB может определять то, указывает ли результат декодирования PUSCH ACK или NACK, на этапе 706. Если результат декодирования PUSCH указывает ACK, eNB может передавать PHICH в k-том субкадре на первой компонентной несущей, на этапе 708.
[151] Если результат декодирования PUSCH указывает NACK, eNB может передавать PDCCH для диспетчеризации PHICH и/или адаптивной повторной передачи в субкадре k на первой компонентной несущей, на этапе 707.
[152] eNB может принимать повторную передачу PUSCH в субкадре t2 на второй компонентной несущей, на которой осуществлена начальная передача, на этапе 713.
[153] Фиг. 8 является блок-схемой последовательности операций, иллюстрирующей процедуру UE в способе HARQ, согласно варианту осуществления настоящего изобретения.
[154] UE принимает PDCCH из eNB на этапе 801.
[155] UE декодирует принимаемый PDCCH и определяет то, активирована ли перекрестная диспетчеризация несущих, на этапе 802. Если перекрестная диспетчеризация несущих деактивирована, UE передает PUSCH в eNB на компонентной несущей, на которой передан PDCCH, на этапе 809. Период времени передачи PUSCH может соответствовать взаимосвязи периодов времени между PDCCH и PUSCH, которая задается в компонентной несущей в унаследованном стандарте (например, LTE/LTE-A).
[156] UE может принимать PHICH и/или PDCCH через компонентную несущую, на которой передан PUSCH, согласно взаимосвязи периодов времени между PUSCH, PHICH и PDCCH, которая задается в унаследованном стандарте, на этапе 810.
[157] UE определяет то, следует ли выполнять повторную передачу PUSCH, на основе информации, переносимой в PHICH и/или PDCCH, на этапе 811. Если определяется выполнение повторной передачи PUSCH, процедура возвращается к этапу 809. Если определяется невыполнение повторной передачи PUSCH, UE может завершать операцию для поддержки HARQ согласно аспекту варианта осуществления.
[158] Если перекрестная диспетчеризация несущих активирована, на этапе 802, UE может передавать PUSCH на второй компонентной несущей, указываемой посредством индикатора несущей, на этапе 803. В частности, UE может передавать PUSCH в субкадре t1 восходящей линии связи, появляющемся первым после j субкадров, поскольку субкадр, переносящий PDCCH, j, может задаваться равным значению, которое гарантирует наименьшее время обработки сигналов UE (например, j=4).
[159] UE может определять i-тый субкадр, переносящий PHICH, соответствующий PUSCH, и k-тый субкадр, переносящий PDCCH для диспетчеризации адаптивной повторной передачи PUSCH на первой компонентной несущей, на этапе 804. Период времени передачи PHICH может быть i-тым субкадром (субкадром нисходящей линии связи), поступающим первым на первой компонентной несущей, по меньшей мере, после j субкадров, начиная с субкадра, переносящего PUSCH (здесь i>t1+j). Кроме того, период времени передачи PDCCH для диспетчеризации адаптивной повторной передачи может быть k-тым субкадром, ближайшим к периоду времени повторной передачи PUSCH UE, из субкадров нисходящей линии связи на первой компонентной несущей, по меньшей мере, за j субкадров от периода времени повторной передачи PUSCH UE (t2) (здесь k<t2-j).
[160] Если i<k, UE может иметь сведения, что период времени передачи PHICH посредством eNB регулируется от i-того субкадра к P-тому субкадру (I'=k), так что периоды времени передачи PHICH и/или PDCCH для адаптивной повторной передачи согласуются друг с другом, на этапе 805.
[161] UE может принимать PHICH и/или PDCCH в k-том субкадре, на этапе 806.
[162] UE определяет то, следует ли повторно передавать PUSCH, на основе информации, переносимой в принимаемом PHICH и/или PDCCH, на этапе 807. Если определяется не передавать повторно PUSCH, UE может завершать операцию для поддержки HARQ согласно варианту осуществления настоящего изобретения.
[163] Если определяется повторно передавать PUSCH, UE может повторно передавать PUSCH в субкадре t2 на второй компонентной несущей, на которой осуществлена начальная передача, на этапе 808.
[164] Фиг. 9 является схемой, иллюстрирующей взаимосвязь периодов времени передачи/приема PHICH и/или PDCCH при условии i<k, согласно варианту осуществления настоящего изобретения. Фиг. 9 показывает периоды времени передачи/приема сигналов в TDD-системе, сконфигурированной с двумя агрегированными компонентными несущими, т.е. с компонентной несущей CC1 901, работающей в конфигурации #1 нисходящей-восходящей линии связи TDD, и компонентной несущей CC2 902, работающей в конфигурации #2 нисходящей-восходящей линии связи TDD. Хотя фиг. 9 направлен на случай, в котором периоды времени радиокадра CC1 901 и CC2 902 согласуются друг с другом, eNB и/или UE, поддерживающие HARQ, может работать с различными периодами времени радиокадра согласно варианту осуществления настоящего изобретения.
[165] На фиг. 9, можно предположить, что CC1 901 является первой компонентной несущей, на которой передается PDCCH для перекрестной диспетчеризации несущих PUSCH, который должен быть передан на CC2 902. Когда eNB намеревается диспетчеризовать начальную передачу PUSCH в четвертом субкадре 904 i-того радиокадра на CC2 902, eNB может передавать PDCCH в нулевом субкадре 903 i-того радиокадра в качестве субкадра нисходящей линии связи, поступающего первым (самым первым), по меньшей мере, за 4 субкадра от периода времени передачи PUSCH на CC1 902. Доступный период времени передачи посредством eNB PHICH, соответствующего PUSCH, может быть 9-м субкадром 905 i-того радиокадра в качестве самого первого кадра нисходящей линии связи, по меньшей мере, после 4 субкадров с момента периода времени передачи PUSCH UE на CC1 901. Согласно взаимосвязи периодов времени повторной передачи синхронного HARQ CC2 902, когда осуществляется повторная передача PUSCH, период времени повторной передачи PUSCH UE может быть четвертым субкадром 907 (i+1)-го радиокадра. В случае PDCCH для диспетчеризации адаптивной повторной передачи PUSCH доступный период времени передачи PDCCH может быть нулевым субкадром (i+1)-го радиокадра в качестве субкадра нисходящей линии связи, ближайшего (самого последнего) к периоду времени повторной передачи PUSCH UE, по меньшей мере, за 4 субкадра от периода времени повторной передачи PUSCH на CC1 901.
[166] Как описано со ссылкой на фиг. 5-8, eNB может согласовывать доступный период времени 905 передачи PHICH с доступным периодом времени передачи PDCCH, чтобы определять период времени передачи PHICH и/или PDCCH в нулевом субкадре 906 (i+1)-го радиокадра.
[167] Периоды времени передачи/приема PHICH и/или PDCCH, согласно варианту осуществления настоящего изобретения, могут быть модифицированы в различных формах. Например, eNB может регулировать период времени передачи PDCCH для адаптивной повторной передачи от k-того субкадра, вычисленного так, как описано со ссылкой на фиг. 5, к субкадру k' (k'=i), так что период времени передачи PHICH и период времени передачи PDCCH для адаптивной повторной передачи согласуются друг с другом. На фиг. 10, период времени передачи PDCCH регулируется к i-тому субкадру 1040, а не k-тому субкадру 1050, при условии, идентичном условию фиг. 5. На фиг. 10, PDCCH для перекрестной диспетчеризации несущих или PHICH передается на первой компонентной несущей CC1 1010, а PUSCH, перекрестно диспетчеризованный посредством PDCCH, передается на второй компонентной несущей CC2 1020. Когда период времени начальной передачи PUSCH является нулевым субкадром (t1) 1030 в системе с использованием синхронного HARQ, имеющего фиксированный период времени передачи данных в восходящей линии связи, период времени повторной передачи PUSCH может быть нулевым субкадром (t2) 1060 следующего радиокадра.
[168] eNB может использовать i-тый субкадр в качестве периода времени передачи PHICH и k-тый субкадр в качестве периода времени передачи PDCCH, вычисленного в варианте осуществления по фиг. 5, могут быть использованы в качестве фактических периодов времени передачи PHICH и PDCCH. Ниже предоставляется подробное описание процедуры UE со ссылкой на фиг. 11.
[169] Фиг. 11 является блок-схемой последовательности операций, иллюстрирующей процедуру UE в способе HARQ, согласно другому варианту осуществления настоящего изобретения.
[170] Этапы 1101-1104 по фиг. 11 являются практически идентичными с этапами 801-804 по фиг. 8, подробно описанными выше. Кроме того, этапы 1111-1113 являются практически идентичными с этапами 809-811 по фиг. 8, подробно описанными выше.
[171] UE может принимать PHICH в i-том субкадре, на этапе 1105.
[172] UE определяет то, принимается ли PDCCH в k-том субкадре, на этапе 1106. Если PDCCH принимается на этапе 1106, UE определяет то, следует ли выполнять повторную передачу PUSCH, согласно результату декодирования PDCCH в k-том субкадре, на этапе 1107. Если PDCCH не принимается на этапе 1106, UE определяет то, следует ли выполнять повторную передачу PUSCH, согласно результату декодирования PHICH в i-том субкадре, на этапе 1108. UE определяет то, выполнять ли повторную передачу PUSCH на этапе 1109, согласно результату определения на этапе 1107 и/или 1108. Этап 1110 является практически идентичным с этапом 808 по фиг. 8, подробно описанным выше.
[173] Когда индекс i субкадра, доступного для передачи подтверждения приема HARQ, превышает индекс k субкадра, доступного для диспетчеризации передачи информации (т.е. i>k), eNB может передавать PHICH и/или PDCCH в i-том субкадре. После приема PHICH и/или PDCCH, передаваемого посредством eNB в i-том субкадре первой соты, UE может передавать (или повторно передавать) данные (например, PUSCH) в eNB в соответствии с PHICH и/или PDCCH в третьем субкадре второй соты. Здесь третий субкадр может иметь самую первую длительность, доступную для передачи (или повторной передачи) данных UE (например, PUSCH) начиная со второго субкадра согласно синхронному HARQ. Второй субкадр может быть свободным ресурсом, переносящим PUSCH, или ресурсом, выделяемым другому UE, отличному от соответствующего UE.
[174] Приводится описание взаимосвязи периодов времени между PDCCH, PUSCH и PHICH, когда период времени передачи PHICH, вычисленный так, как описано выше, позже периода времени передачи PDCCH для повторной передачи PUSCH, т.е. i>k, когда конфигурации нисходящей-восходящей линии связи TDD для агрегированных компонентных несущих отличаются друг от друга, и перекрестная диспетчеризация несущих применяется в TDD-радиосвязи, конфигурирующей широкую полосу пропускания через агрегирование несущих, со ссылкой на фиг. 12-17.
[175] Фиг. 12 является схемой, иллюстрирующей взаимосвязь периодов времени в случае, если взаимосвязь между i-тым субкадром, переносящим PHICH, и k-тым субкадром, переносящим PDCCH для диспетчеризации повторной передачи PUSCH, представляет собой i>k. На фиг. 12 PDCCH для перекрестной диспетчеризации несущих или PHICH передается на первой компонентной несущей CC1 1210, и PUSCH, подвергнутый перекрестной диспетчеризации несущих посредством PDCCH, передается на второй компонентной несущей CC2 1220. Если период времени начальной передачи PUSCH UE является нулевым субкадром (t1) 1230 в системе, работающей в синхронном HARQ, имеющем фиксированную передачу данных в восходящей линии связи, период времени повторной передачи PUSCH может быть нулевым субкадром (t2) 1260 следующего радиокадра. Например, начальная передача/повторная передача PUSCH может быть выполнена в идентичном субкадре различных радиокадров.
[176] Когда UE выполняет начальную передачу PUSCH в субкадре t1 1230 CC2 1220 согласно диспетчеризации eNB, eNB может передавать PHICH, переносящий ACK или NACK, соответствующий PUSCH, в i-том субкадре 1240, в качестве субкадра нисходящей линии связи, CC1 1210. Здесь i может быть наименьшим значением, удовлетворяющем условию i>=t1+j. Если определяется передача NACK, соответствующего PUSCH, и применение адаптивной повторной передачи, eNB может передавать PDCCH, в k-том субкадре 1250 CC1 1210, для диспетчеризации повторной передачи PUSCH в субкадре t2 1260 CC2 1220. Здесь k является наибольшим значением, удовлетворяющим условию k<t-j.
[177] Длительность, обеспечиваемая до повторной передачи PUSCH в t2 1260 после приема PHICH в i-том субкадре 1240, составляет Δ2 субкадров 1280, может возникать недостаток времени обработки сигналов UE. Хотя необходимо обеспечивать достаточно времени для начальной передачи PUSCH в нулевом субкадре (t1) 1230 для eNB, чтобы передавать PDCCH для диспетчеризации адаптивной повторной передачи в k-том субкадре 1250, время, обеспеченное фактически, представляет собой Δ1 субкадр 1270, что приводит к недостаточному времени обработки сигналов eNB.
[178] eNB, согласно варианту осуществления настоящего изобретения, может регулировать период времени передачи PDCCH посредством eNB от k-того субкадра к k'-тому субкадру (k'=i) таким образом, чтобы согласовывать периоды времени передачи PHICH и PDCCH для адаптивной повторной передачи друг с другом. eNB также может регулировать период времени повторной передачи PUSCH от субкадра t2 1260 к субкадру t3 в качестве периода времени следующей повторной передачи.
[179] Фиг. 13 показывает случай, когда период времени передачи PDCCH посредством eNB регулируется к i-тому субкадру 1350, отличному от k-того субкадра 1340, при условии, идентичном условию варианта осуществления по фиг. 12. На фиг. 13 PDCCH для перекрестной диспетчеризации несущих или PHICH передается на первой компонентной несущей CC1 1310, и PUSCH, подвергнутый перекрестной диспетчеризации несущих посредством PDCCH, передается на второй компонентной несущей CC2 1320. Период времени повторной передачи PUSCH, соответствующий периоду времени начальной передачи PUSCH 1330, может регулироваться от субкадра t2 1360 к субкадру t3 1370. Если обобщать, период времени начальной передачи или повторной передачи PUSCH в качестве t1 1330, t2 1360 и t3 1370, t1 1330 соответствует n-ному субкадру m-того радиокадра, t2 1360 соответствует n-ному субкадру (m+1)-го радиокадра, и t3 соответствует n-ному субкадру (m+2)-ого радиокадра.
[180] Ниже предоставляется описание периодов времени передачи/приема сигналов eNB и UE, поддерживающего HARQ согласно варианту осуществления настоящего изобретения, со ссылкой на фиг. 14 и 15.
[181] Фиг. 14 является блок-схемой последовательности операций, иллюстрирующей процедуру eNB в способе HARQ, согласно варианту осуществления настоящего изобретения.
[182] Этапы 1401-1404 по фиг. 14 являются практически идентичными с этапами 701-704 по фиг. 7, подробно описанными выше. Кроме того, этапы 1409-1412 по фиг. 14 являются практически идентичными с этапами 709-711 по фиг. 7, подробно описанными выше.
[183] Если i>k, eNB регулирует фактический период времени передачи PDCCH от k-того субкадра к k'-тому субкадру (k'=i) таким образом, чтобы согласовывать PHICH и PDCCH для периодов времени адаптивной повторной передачи друг с другом, на этапе 1405.
[184] eNB может определять то, следует ли передавать ACK или NACK, согласно результату декодирования PUSCH, на этапе 1406. Если определяется передача ACK на этапе 1406, eNB передает PHICH в i-том субкадре первой компонентной несущей, на этапе 1408.
[185] Если определяется передача NACK на этапе 1406, eNB может передавать PDCCH для PHICH и/или PDCCH для диспетчеризации адаптивной повторной передачи в i-том субкадре первой компонентной несущей, на этапе 1407.
[186] eNB может принимать повторную передачу PUSCH в субкадре t3 второй компонентной несущей, на которой осуществлена начальная передача PUSCH, на этапе 1413 (здесь t3 является самой первой длительностью, доступной для повторной передачи PUSCH с момента t2).
[187] Фиг. 15 является блок-схемой последовательности операций, иллюстрирующей процедуру UE в способе HARQ, согласно варианту осуществления настоящего изобретения.
[188] Этапы 1501-1504 по фиг. 15 являются практически идентичными с этапами 801-804 по фиг. 8, подробно описанными выше. Кроме того, этапы 1509-1511 по фиг. 15 являются практически идентичными с этапами 809-811 по фиг. 8, подробно описанными выше.
[189] Если i>k, UE может воспринимать, что период времени передачи PDCCH посредством eNB регулируется от k-того субкадра к k'-тому субкадру (k'=i), так что периоды времени передачи PHICH и PDCCH для адаптивной повторной передачи согласуются друг с другом, на этапе 1505.
[190] UE может принимать PHICH и/или PDCCH в i-том субкадре, на этапе 1506.
[191] UE определяет то, следует ли повторно передавать PUSCH, на основе информации, переносимой посредством PHICH и/или PDCCH, на этапе 1507. Если определяется не передавать повторно PUSCH на этапе 1507, UE может завершать операцию для поддержки HARQ согласно варианту осуществления настоящего изобретения.
[192] Если определяется повторно передавать PUSCH на этапе 1507, UE может повторно передавать PUSCH в субкадре t3 второй компонентной несущей, на которой осуществлена начальная передача PUSCH, на этапе 1508.
[193] Фиг. 16 является схемой, иллюстрирующей взаимосвязь периодов времени PDCCH и/или передачи/приема PDCCH, когда i>k, согласно варианту осуществления настоящего изобретения. В частности, фиг. 16 показывает периоды времени передачи/приема сигналов в TDD-системе, работающей с двумя агрегированными компонентными несущими, т.е. CC1 1601 в конфигурации #3 нисходящей-восходящей линии связи TDD и CC2 1602 в конфигурации #6 нисходящей-восходящей линии связи TDD. Хотя фиг. 16 направлен на случай, в котором периоды времени на CC1 1601 и CC2 1602 согласуются друг с другом, eNB и/или UE, поддерживающие HARQ, могут работать в случае, в котором периоды времени на двух компонентных несущих также не согласуются.
[194] На фиг. 16 PDCCH для перекрестной диспетчеризации несущих PUSCH, который должен быть передан на CC2 1602, может быть передан на CC1 1601 в качестве первой компонентной несущей. В случае если начальная передача UE PUSCH осуществляется в 8-м субкадре 1603 i-того радиокадра на CC2 1602, первый период времени повторной передачи PUSCH может быть 8-м субкадром 1607 (i+1)-го радиокадра, и второй период времени повторной передачи PUSCH может быть 8-м субкадром 1608 (i+2)-го радиокадра. Период времени передачи PHICH UE, соответствующий начальной передаче PUSCH, может быть пятым субкадром 1604 (i+1)-го радиокадра в качестве первого (самого первого) субкадра нисходящей линии связи, появляющегося на CC1 1601, по меньшей мере, после 4 субкадров с периода времени передачи PUSCH UE.
[195] В случае передачи PDCCH для диспетчеризации адаптивной повторной передачи начальной передачи PUSCH доступный период времени передачи PDCCH может быть первым субкадром 1605 (i+1)-го радиокадра в качестве самого первого субкадра нисходящей линии связи, появляющегося на CC1 1601, по меньшей мере, за 4 субкадра из первого периода времени 1607 повторной передачи PUSCH. Тем не менее, если он не может обеспечивать время обработки сигналов (например, 4 субкадра) до конфигурации PDCCH после приема начальной передачи PUSCH в субкадре 1603, eNB не сможет передавать передачу PDCCH. Соответственно, eNB регулирует период времени передачи PDCCH к пятому субкадру (i+1)-го радиокадра, чтобы согласовывать период времени передачи PDCCH и PHICH в субкадре 1606.
[196] Когда осуществляется повторная передача PUSCH, время обработки сигналов UE является недостаточным для повторной передачи PUSCH в 8-м субкадре 1607 (i+1)-го радиокадра, так что повторная передача завершается неудачно в 8-м субкадре 1607. Соответственно, UE может повторно передавать PUSCH в 8-м субкадре 1608 (i+2)-го радиокадра, который соответствует самому первому периоду времени повторной передачи PUSCH, начиная с субкадра 1607.
[197] Этот вариант осуществления настоящего изобретения может быть модифицирован по-разному. Когда i превышает k (i>k), eNB может управлять другими UE (соседними UE без использования первого субкадра) таким образом, чтобы подавлять передачу данных. Здесь четвертый субкадр используется во второй соте и имеет самую первую длительность восходящей линии связи, начиная со второго субкадра. В частности, четвертый субкадр может быть ближайшим субкадром восходящей линии связи, начиная со второго субкадра. eNB может передавать PHICH и/или PDCCH в i-том субкадре. После приема PHICH и/или PDCCH, передаваемого посредством eNB в i-том субкадре первой соты, UE может передавать (или повторно передавать) данные (например, PUSCH) в eNB в соответствии с PHICH и/или PDCCH в четвертом субкадре. По меньшей мере, некоторые субкадры (например, четвертый субкадр) второй соты могут не согласовываться с длительностью передачи данных по восходящей линии связи синхронного HARQ.
[198] Ссылаясь на фиг. 13, период времени повторной передачи PUSCH для повторной передачи PUSCH, передаваемого в периоде времени 1330 передачи, не является фиксированным в t3 1370, а может гибко регулироваться к субкадру t3' восходящей линии связи на второй компонентной несущей 1320 перед t3.
[199] Фиг. 17 показывает вариант осуществления настоящего изобретения, в котором повторная передача PUSCH в субкадре t1 1730 регулируется от субкадра t2 1760 (1370 на фиг. 13) к субкадру t3' 1770 при условии, идентичном условию фиг. 13. PDCCH для перекрестной диспетчеризации несущих или PHICH передается на первой компонентной несущей CC1 1710, и PUSCH, подвергнутый перекрестной диспетчеризации несущих посредством PDCCH, передается на второй компонентной несущей CC2 1720. Когда период времени повторной передачи PUSCH регулируется к субкадру 1770, период времени 1740, доступный для передачи PDCCH, переносящего информацию диспетчеризации повторной передачи для периода времени 1760 повторной передачи PUSCH, может быть изменен на субкадр 1750. В это время eNB приостанавливает диспетчеризацию PUSCH, отличных от повторно передаваемого PUSCH в субкадре t3' 1770, с тем чтобы минимизировать задержку на передачу повторной передачи PUSCH.
[200] Согласно варианту осуществления настоящего изобретения комбинации конфигураций TDD, которые приводят к случаю, когда i превышает k(i>k), исключаются. В частности, предварительно определенные комбинации конфигураций TDD первой и второй сот могут быть одной из комбинаций конфигураций TDD, удовлетворяющих условию, где i меньше или равен k.
[201] Согласно другим вариантам осуществления настоящего изобретения длительность передачи PHICH и/или PDCCH может быть определена различными модифицированными способами в дополнение к вышеописанным способам.
[202] Ниже предоставляются описания eNB и UE, поддерживающего HARQ, согласно варианту осуществления настоящего изобретения, со ссылкой на фиг. 18 и 19.
[203] Фиг. 18 является блок-схемой, иллюстрирующей конфигурацию передающего устройства 600, согласно варианту осуществления настоящего изобретения.
[204] eNB (т.е. первое приемо-передающее устройство) может включать в себя приемный модуль 1836, передающий модуль 1824 и/или модуль 1804 управления. Приемный модуль 1836 может принимать данные, передаваемые посредством второго приемо-передающего устройства (т.е. UE) в первом субкадре второй соты (вторая сота диспетчеризуется посредством первой соты). Передающий модуль может передавать во второе приемо-передающее устройство информацию диспетчеризации для подтверждения приема HARQ, соответствующего первому субкадру и второму субкадру (второй субкадр имеет самую первую длительность, доступную для повторной передачи данных второго приемо-передающего устройства, начиная с первого субкадра второй соты). Модуль 1804 управления может управлять таким образом, что он передает подтверждение приема HARQ и/или информацию диспетчеризации в одном субкадре из субкадров, управляемых посредством первой соты, которые включаются в длительность между первым и вторым субкадрами, управляемыми посредством второй соты. Первая и вторая соты могут иметь различные конфигурации TDD (конфигурация TDD представляет информацию относительно компоновки субкадров восходящей и нисходящей линии связи, управляемых посредством соты).
[205] Передающий модуль может включать в себя PDCCH-блок 1805, PHICH-блок 1817 и мультиплексор 1815. Приемный модуль 1836 может включать в себя PUSCH-блок 1825 и/или демультиплексор 1835. Модуль управления может включать в себя контроллер 1801 CA и распределения времени и/или диспетчер 1803.
[206] PDCCH-блок 1805 может включать в себя блок 1807 DCI-форматирования, канальный кодер 1809, блок 1811 согласования скорости и/или модулятор 1813. PHICH-блок 1817 может включать в себя HARQ ACK/NACK-формирователь 1819, PHICH-формирователь 1821 и/или модулятор 1823.
[207] PUSCH-блок 1825 может включать в себя демодулятор 1833, блок 1831 рассогласования скорости, канальный декодер 1829 и/или блок 1827 получения данных.
[208] Контроллер 1801 CA и распределения времени модуля 1804 управления может регулировать/определять агрегирование несущих для UE, которое должно диспетчеризоваться, и взаимосвязь периодов времени между физическими каналами посредством управления объемом данных и/или доступным объемом ресурсов в системе. Контроллер 1801 CA и распределения времени может предоставлять диспетчеру 1803 и/или PUSCH-блок 1825 информацию относительно того, агрегировать ли несущие, и/или взаимосвязь периодов времени между физическими каналами. Здесь, взаимосвязь периодов времени может соответствовать описанию, приведенному со ссылкой на фиг. 1-17, согласно варианту осуществления настоящего изобретения.
[209] Например, контроллер 1801 CA и распределения времени может управлять PDCCH-блоком 1805 и/или PHICH-блоком 1817 таким образом, чтобы согласовывать периоды времени передачи друг с другом, посредством задержки периода времени передачи PHICH до периода времени передачи PHICH, когда применяется перекрестная диспетчеризация несущих, и доступный период времени передачи PHICH (т.е. i), вычисленный так, как описано выше со ссылкой на фиг. 5-11, раньше доступного периода времени передачи (т.е. k) PDCCH для повторной передачи PUSCH. Кроме того, контроллер 1801 CA и распределения времени может управлять PUSCH-блоком 1825 согласно периоду времени приема PUSCH, соответствующему периоду времени передачи PHICH и/или PDCCH.
[210] Контроллер 1801 CA и распределения времени может управлять PDCCH-блоком 1805 и/или PHICH-блоком 1817, чтобы согласовывать периоды времени передачи PDCCH и PHICH, посредством задержки периода времени передачи PDCCH до периода времени передачи PHICH, когда период времени передачи PDCCH для диспетчеризации повторной передачи PUSCH, который вычисляется так, как описано выше со ссылкой на фиг. 12-17, находится раньше периода времени передачи PHICH (т.е. k<i). Контроллер 1801 CA и распределения времени может управлять PUSCH-блоком 1825 согласно периоду времени приема PUSCH, соответствующему периоду времени передачи PHICH и/или PDCCH.
[211] Блок 1807 DCI-форматирования PDCCH-блока 1805 может формировать DCI согласно управляющему сигналу из диспетчера 1803. Канальный кодер 1809 выполняет канальное кодирование для DCI, чтобы добавлять код с коррекцией ошибок. Блок 1811 согласования скорости согласует скорость канально кодированной DCI с объемом ресурсов. Модулятор 1813 модулирует DCI после согласования скорости, чтобы формировать PDCCH. Мультиплексор 1815 мультиплексирует PDCCH и другие сигналы с учетом их периодов времени передачи.
[212] HARQ ACK/NACK-формирователь 1819 PHICH-блока 1817 принимает управляющий сигнал из диспетчера 1803 и формирует HARQ ACK/NACK, соответствующее PUSCH, принимаемому из UE. Блок 1821 PHICH-форматирования форматирует HARQ ACK/NACK, подходящее для структуры PHICH-канала. Модулятор 1823 может модулировать HARQ ACK/NACK, форматируемое подходящий для структуры PHICH-канала, и мультиплексор 1815 мультиплексирует модулированное HARQ ACK/NACK с другими сигналами.
[213] Сигналы, мультиплексированные посредством мультиплексора 1815, могут быть переданы в UE в форме OFDM-сигнала.
[214] В PUSCH-блоке 1825 приемного модуля 1836 демультиплексор 1835 демультиплексирует сигнал, принимаемый из UE, чтобы извлекать PUSCH. Демодулятор 1833 может демодулировать PUSCH в символы перед согласованием скорости. Канальный декодер 1829 декодирует символы, и блок 1827 получения данных получает данные из декодированного сигнала. Блок 1827 получения данных уведомляет диспетчер 1803 относительно результата декодирования, т.е. того, является ли декодирование ошибочным, и диспетчер 1803 управляет формированием HARQ ACK/NACK нисходящей линии связи согласно результату декодирования. Контроллер 1801 CA и распределения времени также может управлять периодом времени передачи HARQ ACK/NACK по нисходящей линии связи на основе результата декодирования.
[215] eNB дополнительно может включать в себя запоминающее устройство. Запоминающее устройство может сохранять, по меньшей мере, одну из таблицы преобразования, преобразующей i-тый субкадр и k-тый субкадр между собой согласно комбинациям конфигураций TDD первой и второй компонентных несущих, или таблицы преобразования, по меньшей мере, для одного субкадра, переносящего подтверждение приема HARQ и/или информацию диспетчеризации согласно комбинации конфигураций TDD. Модуль 1804 управления может осуществлять доступ к таблице преобразования в запоминающем устройстве, чтобы управлять периодом времени передачи/приема сигналов согласно таблице преобразования.
[216] Фиг. 19 является блок-схемой, иллюстрирующей конфигурацию передающего устройства 600, согласно варианту осуществления настоящего изобретения.
[217] UE (т.е. второе приемо-передающее устройство) включает в себя передающий модуль 1914, приемный модуль 1932 и/или модуль 1901 управления. Передающий модуль 1914 может передавать данные в первое приемо-передающее устройство (т.е. eNB) в первом субкадре второй соты (вторая сота диспетчеризуется посредством первой соты). Приемный модуль 1932 может принимать информацию диспетчеризации для подтверждения приема HARQ, соответствующего первому субкадру и/или второму субкадру (второй субкадр имеет самую первую длительность, доступную для повторной передачи данных в первое приемо-передающее устройство, начиная с первого субкадра во второй соте). Модуль 1901 управления может управлять так, что подтверждение приема HARQ и/или информация диспетчеризации передаются посредством первого приемо-передающего устройства, по меньшей мере, в субкадре из субкадров, управляемых посредством первой соты, в течение длительности между первым и вторым субкадрами. Первая и вторая соты могут иметь различные конфигурации TDD (конфигурация TDD представляет информацию относительно компоновки субкадров восходящей и нисходящей линий связи, используемых в соте).
[218] Передающий модуль 1914 может включать в себя PUSCH-блок 1903 и/или мультиплексор 1913. Приемный модуль 1932 может включать в себя PHICH-блок 1915, PDCCH-блок 1921 и/или демультиплексор 1931. Модуль управления может быть контроллером 1901 CA и распределения времени либо включать в себя контроллер 1901 CA и распределения времени.
[219] PUSCH-блок 1903 может включать в себя буфер 1905 данных, канальный кодер 1907, блок 1909 согласования скорости и/или модулятор 1911. PHICH-блок 1915 может включать в себя блок 1917 получения HARQ ACK/NACK и/или демодулятор 1919, и PDCCH-блок 1921 может включать в себя демодулятор 1929, блок 1927 рассогласования скорости, канальный декодер 1925 и/или блок 1923 получения DCI.
[220] Контроллер 1901 CA и распределения времени конфигурирует состояние агрегирования несущих для UE на основе DCI, принимаемой из eNB, компонентной несущей для передачи PUSCH в перекрестной диспетчеризации несущих, и/или взаимосвязи периодов времени передачи между физическими каналами, и уведомляет PUSCH-блок 1903, PHICH-блок 1915 и PDCCH-блок 1921 относительно результата конфигурирования. Взаимосвязь периодов времени соответствует способу, описанному в вариантах осуществления настоящего изобретения.
[221] Например, контроллер 1901 CA и распределения времени может воспринимать, что периоды времени передачи согласуются друг с другом, посредством задержки периода времени передачи PHICH до периода времени передачи PHICH, когда применяется перекрестная диспетчеризация несущих, и доступный период времени передачи PHICH (т.е. i), вычисленный так, как описано выше со ссылкой на фиг. 5-11, раньше доступного периода времени передачи (т.е. k) PDCCH для повторной передачи PUSCH. Контроллер 1901 CA и распределения времени также может управлять PDCCH-блоком 1921 и/или PHICH-блоком 1915 согласно периоду времени приема PHICH и/или PDCCH и PUSCH-блоком 1903 согласно периоду времени передачи PUSCH, соответствующему ему.
[222] Контроллер 1901 CA и распределения времени также может воспринимать, что периоды времени передачи PDCCH и PHICH согласуются друг с другом, посредством задержки периода времени передачи PDCCH до периода времени передачи PHICH, когда период времени передачи PDCCH для диспетчеризации повторной передачи PUSCH, который вычисляется так, как описано выше со ссылкой на фиг. 12-17, находится раньше периода времени передачи PHICH (т.е. k<i). Контроллер 1901 CA и распределения времени также может управлять PDCCH-блоком 1921 и PHICH-блоком 1915 согласно периоду времени приема PDCCH и/или PHICH и PUSCH-блоку 1903 согласно периоду времени передачи PUSCH, соответствующему ему.
[223] Канальный кодер 1907 PUSCH-блока 1903 считывает данные из буфера 1905 данных, выполняет канальное кодирование для данных, чтобы добавлять код с коррекцией ошибок, под управлением согласно распределению времени контроллера 1901 CA и распределению времени. Блок 1909 согласования скорости может согласовывать канально кодированные данные с объемом выделенных ресурсов, и модулятор 1911 может модулировать данные после согласования скорости. Мультиплексор 1913 мультиплексирует модулированные данные с другими сигналами с учетом периодов времени передачи.
[224] Сигналы, мультиплексированные посредством мультиплексора 1913, преобразуются в SC-FDMA-сигнал, который должен быть передан в eNB.
[225] В PHICH-блоке 1915 приемного модуля 1932 демультиплексор 1931 извлекает PHICH из сигнала, передаваемого посредством UE, и демодулятор 1919 демодулирует PHICH. Блок 1917 получения HARQ ACK/NACK может получать HARQ ACK или NACK для демодулированного PUSCH. HARQ NACK или NACK для PUSCH доставляется в контроллер 1901 CA и распределения времени, контроллер 1901 CA и распределения времени может регулировать период времени повторной передачи PUSCH согласно HARQ ACK/NACK.
[226] В PDCCH-блоке 1921 демультиплексор 1931 извлекает PDCCH из сигнала, передаваемого посредством eNB, и демодулятор 1929 демодулирует извлеченный PDCCH. Блок 1927 рассогласования скорости может переконфигурировать демодулированный PDCCH в символ перед согласованием скорости. Канальный декодер 1925 выполняет канальное декодирование для PDCCH после рассогласования скорости, и блок 1923 получения DCI получает DCI из канально декодированного PDCCH. Полученная DCI доставляется в контроллер 1901 CA и распределения времени, и контроллер 1901 CA и распределения времени может регулировать период времени передачи PUSCH UE на основе полученной DCI.
[227] UE дополнительно может включать в себя запоминающее устройство. Запоминающее устройство может иметь, по меньшей мере, одну из таблицы преобразования, преобразующей i-тый субкадр и k-тый субкадр между собой согласно комбинациям конфигураций TDD первой и второй компонентных несущих, или таблицы преобразования, по меньшей мере, для одного субкадра, переносящего подтверждение приема HARQ и/или информацию диспетчеризации согласно комбинации конфигураций TDD. Контроллер 1901 CA и распределения времени может осуществлять доступ к таблице преобразования в запоминающем устройстве, чтобы управлять периодом времени передачи/приема сигналов согласно таблице преобразования.
[228] Фиг. 20 является блок-схемой последовательности операций, иллюстрирующей процедуру первого приемо-передающего устройства в способе HARQ, согласно варианту осуществления настоящего изобретения.
[229] Первое приемо-передающее устройство может передавать информацию диспетчеризации (например, PDCCH) для первого субкадра второй соты, на этапе 2005. Первое приемо-передающее устройство представляет собой eNB и второе приемо-передающее устройство представляют собой UE. Вторая сота может быть диспетчеризована посредством первой соты.
[230] Первое приемо-передающее устройство может принимать данные (например, PUSCH), передаваемые посредством второго приемо-передающего устройства в первом субкадре второй соты, на этапе 2010.
[231] Первое приемо-передающее устройство может передавать во второе приемо-передающее устройство информацию диспетчеризации (например, PDCCH) для подтверждения приема HARQ (например, PHICH), соответствующего первому кадру, или информацию диспетчеризации (например, PDCCH) для второго субкадра, по меньшей мере, в одном субкадре из субкадров первой соты, которые включаются в длительность между первым и вторым субкадрами второй соты, на этапе 2015. Второй субкадр может иметь самую первую длительность, доступную для передачи/повторной передачи данных второго приемо-передающего устройства, начиная с первого субкадра второй соты. Первая и вторая соты могут иметь различные конфигурации TDD. Конфигурация TDD может быть информацией относительно компоновки субкадров восходящей и нисходящей линий связи для использования в соответствующей соте.
[232] Подробное описание операций поддержки HARQ первого приемо-передающего устройства после этапа 2010 приводится со ссылкой на фиг. 21-23.
[233] Как показано на фиг. 21, первое приемо-передающее устройство может определять i-тый и k-тый субкадры для использования в первой соте, на этапе 2105. Здесь, i и k могут быть целыми числами. i-тый субкадр может иметь длительность, доступную для передачи посредством первого приемо-передающего устройства подтверждения приема HARQ (например, PHICH), соответствующего первому субкадру, после первого субкадра. k-тый субкадр может иметь длительность, доступную для передачи посредством первого приемо-передающего устройства информации диспетчеризации (например, PDCCH) для второго субкадра перед вторым субкадром. Здесь i и k могут быть вычислены посредством вышеприведенных уравнений (1) и (2).
[234] Первое приемо-передающее устройство может определять то, равны ли i и k друг другу, на этапе 2110. Если i и k равны друг другу (i==k), первое приемо-передающее устройство может передавать подтверждение приема HARQ и/или информацию диспетчеризации в i-том субкадре (или k-том субкадре), на этапе 2115.
[235] Если i и k не равны друг другу, первое приемо-передающее устройство определяет то, превышает ли i k, на этапе 2120.
[236] Если i не превышает k, т.е. если i меньше k (i<k), первое приемо-передающее устройство может передавать подтверждение приема HARQ (например, PHICH), соответствующее первому субкадру, и/или информацию диспетчеризации (например, PDCCH) для второго субкадра во второе приемо-передающее устройство в i-том субкадре, на этапе 2130. Первое приемо-передающее устройство также может передавать PHICH и/или PDCCH в k-том субкадре.
[237] Первое приемо-передающее устройство может принимать данные, передаваемые (или повторно передаваемые) посредством второго приемо-передающего устройства во втором субкадре второй соты, на этапе 2135.
[238] Если i превышает k(i>k) на этапе 2120, технология переходит к этапу 2205 по фиг. 22 либо к этапу 2305 по фиг. 23.
[239] Относительно фиг. 22, первое приемо-передающее устройство может передавать подтверждение приема HARQ, соответствующее первому субкадру, и/или информацию диспетчеризации для второго субкадра (или третьего субкадра) во второе приемо-передающее устройство в i-том субкадре, на этапе 2205.
[240] Первое приемо-передающее устройство может принимать данные, передаваемые (или повторно передаваемые) посредством второго приемо-передающего устройства в третьем субкадре второй соты, на этапе 2210. Третий субкадр может иметь самую первую длительность, доступную для передачи (или повторной передачи) посредством второго приемо-передающего устройства данных, начиная со второго субкадра согласно синхронной HARQ-схеме.
[241] [242] Относительно фиг. 23, первое приемо-передающее устройство может управлять так, что данные из третьего приемо-передающего устройства не передаются в четвертом субкадре, на этапе 2305. Четвертый субкадр может быть самым первым субкадром восходящей линии связи второй соты, который появляется, начиная со второго субкадра. В частности, четвертый субкадр является субкадром, не связанным с длительностью передачи данных по восходящей линии связи синхронного HARQ, связанного с первым субкадром.
[243] Первое приемо-передающее устройство может передавать подтверждение приема HARQ, соответствующее первому субкадру, и/или информацию диспетчеризации для второго субкадра (или четвертого субкадра) в i-том субкадре, на этапе 2310.
[244] Первое приемо-передающее устройство может принимать данные, передаваемые (или повторно передаваемые) посредством второго приемо-передающего устройства в четвертом субкадре второй соты, на этапе 2315.
[245] Операции первого приемо-передающего устройства на этапах 2105, 2110 и 2120 могут быть выполнены перед этапом 2005 или 2010 по фиг. 20. Например, первое приемо-передающее устройство может выполнять определение i-того и k-того субкадра из этапа 2105 с использованием конфигураций TDD первой и второй соты перед этапом 2005 и сравнивать i и k друг с другом на этапе 2110 и/или 2120. Соответственно, первое приемо-передающее устройство может знать то, переходит ли процедура к этапу 2115 или 2130 по фиг. 21 либо к 2205 по фиг. 22, либо к 2305 по фиг. 23, после приема данных из второго приемо-передающего устройства на этапе 2010.
[246] Перед этапом 2005 по фиг. 20 первое приемо-передающее устройство может сохранять преобразование для i-того и k-того субкадра согласно комбинации конфигураций TDD первой и второй сот или таблицы преобразования, по меньшей мере, для субкадра, в котором передаются подтверждение приема HARQ и/или информация диспетчеризации, согласно конфигурации TDD в запоминающем устройстве. Таблица преобразования может включать в себя информацию относительно того, переходит ли процедура к этапу 2115 или 2130 по фиг. 21, либо к 2205 по фиг. 22, либо к 2305 по фиг. 23.
[247] Фиг. 24 является блок-схемой последовательности операций, иллюстрирующей процедуру второго приемо-передающего устройства в способе HARQ, согласно варианту осуществления настоящего изобретения.
[248] Второе приемо-передающее устройство может принимать информацию диспетчеризации (например, PDCCH) для первого субкадра второй соты из первого приемо-передающего устройства, на этапе 2405. Первое приемо-передающее устройство может представлять собой eNB, и второе приемо-передающее устройство может представлять собой UE. Кроме того, вторая сота может быть диспетчеризована посредством первой соты.
[249] Второе приемо-передающее устройство может передавать данные (например, PUSCH) в первое приемо-передающее устройство в первом субкадре второй соты, на этапе 2410.
[250] Второе приемо-передающее устройство может принимать подтверждение приема HARQ (например, PHICH), соответствующее первому субкадру, и/или информацию диспетчеризации (например, PDCCH) для второго субкадра, которая передана посредством первого приемо-передающего устройства, по меньшей мере, в одном из субкадров первой соты, включенных в течение длительности между первым и вторым субкадрами второй соты, на этапе 2415. Второй субкадр может иметь самую первую длительность, доступную для передачи или повторной передачи посредством второго приемо-передающего устройства данных, начиная с первого субкадра второй соты. Первая и вторая соты могут иметь различные конфигурации TDD. Конфигурация TDD может быть информацией относительно компоновки субкадров восходящей и нисходящей линии связи, работающих в ассоциации с соответствующей сотой.
[251] Подробно описание операций поддержки HARQ второго приемо-передающего устройства после этапа 2410 предоставляется со ссылкой на фиг. 25-27.
[252] Относительно фиг. 25, второе приемо-передающее устройство может определять i-тый и k-тый субкадры для использования в первой соте на этапе 2505. i-тый субкадр может иметь длительность, доступную для передачи посредством первого приемо-передающего устройства подтверждения приема HARQ (например, PHICH), соответствующего первому субкадру, после первого субкадра. k-тый субкадр может иметь длительность, доступную для передачи посредством первого приемо-передающего устройства информации диспетчеризации (например, PDCCH) для второго субкадра перед вторым субкадром.
[253] Второе приемо-передающее устройство может определять то, равны ли i и k друг другу, на этапе 2510. Если i и k равны друг другу (i==k), второе приемо-передающее устройство может принимать подтверждение приема HARQ и/или информацию диспетчеризации, передаваемую посредством первого приемо-передающего устройства в i-том субкадре (или k-том субкадре), на этапе 2515.
[254] Если i и k не равны друг другу, второе приемо-передающее устройство определяет то, превышает ли i k, на этапе 2520.
[255] Если i не превышает k, т.е. если i меньше k(i<k), второе приемо-передающее устройство может принимать подтверждение приема HARQ (например, PHICH), соответствующее первому субкадру, и/или информацию диспетчеризации (например, PDCCH) для второго субкадра, передаваемую посредством первого приемо-передающего устройства в i-том субкадре, на этапе 2530. Второе приемо-передающее устройство также может принимать данные, передаваемые (или повторно передаваемые) посредством первого приемо-передающего устройства в k-том субкадре.
[256] Второе приемо-передающее устройство может передавать (или повторно передавать) данные в первое приемо-передающее устройство во втором субкадре второй соты, на этапе 2535.
[257] Если i превышает k(i>k) на этапе 2520, процедура переходит к этапу 2605 по фиг. 26 либо к этапу 2705 по фиг. 7.
[258] Относительно фиг. 26, второе приемо-передающее устройство может принимать подтверждение приема HARQ, соответствующее первому субкадру, и/или информацию диспетчеризации для второго субкадра (или третьего субкадра), из первого приемо-передающего устройства в i-том субкадре, на этапе 2605.
[259] Второе приемо-передающее устройство может передавать (или повторно передавать) данные в первое приемо-передающее устройство в третьем субкадре второй соты, на этапе 2610. Третий субкадр может иметь самую первую длительность, доступную для передачи (или повторной передачи) посредством второго приемо-передающего устройства данных, начиная со второго субкадра, согласно синхронной HARQ-схеме.
[260] [261] Относительно фиг. 27, второе приемо-передающее устройство может принимать, в i-том субкадре, подтверждение приема HARQ, соответствующее первому субкадру, и/или информацию диспетчеризации для второго субкадра (или четвертого субкадра), которая передана посредством первого передающего устройства, на этапе 2705. Четвертый субкадр может быть самым первым субкадром восходящей линии связи второй соты, который появляется, начиная со второго субкадра. Второе приемо-передающее устройство может передавать (или повторно передавать) данные в первое приемо-передающее устройство в четвертом субкадре второй соты, на этапе 2710.
[262] Операции второго приемо-передающего устройства на этапах 2505, 2510 и 2520 могут быть выполнены перед этапом 2405 или 2410 по фиг. 24. Например, второе приемо-передающее устройство может выполнять определение i-того и k-того субкадра из этапа 2505 с использованием конфигураций TDD первой и второй соты и сравнивать i и k друг с другом на этапе 2510 и/или 2520. Соответственно, второе приемо-передающее устройство может знать то, переходит ли процедура к этапу 2515 или 2530 по фиг. 25, либо к 2605 по фиг. 26, либо к 2705 по фиг. 27, после приема данных из первого приемо-передающего устройства на этапе 2410.
[263] Перед этапом 2405 по фиг. 24 второе приемо-передающее устройство может сохранять преобразование для i-того и k-того субкадров согласно комбинации конфигураций TDD первой и второй сот или таблицы преобразования, по меньшей мере, для одного субкадра, в котором передаются подтверждение приема HARQ и/или информация диспетчеризации, согласно конфигурации TDD в запоминающем устройстве. В это время таблица преобразования может включать в себя информацию относительно того, переходит ли процедура к этапу 2515 или 2530 по фиг. 25, либо к 2605 по фиг. 26, либо к 2705 по фиг. 27.
[264] Приводится описание способа для задания периода времени между передачей PUSCH во второй соте и передачей PDCCH в первой соте для диспетчеризации PUSCH (в дальнейшем в этом документе, называемого "первым периодом времени" для удобства) и периода времени для передачи PHICH, переносящего HARQ ACK/NACK, соответствующее PUSCH второй соты в первой соте (в дальнейшем в этом документе, называемого "вторым периодом времени" для удобства), когда первая сота выполняет перекрестную диспетчеризацию несущих для PUSCH первой соты. Подробно, когда первая и вторая соты работают с субкадрами восходящей линии связи в период времени передачи PUSCH второй соты, первый и второй периоды времени соответствуют периоду времени между PDCCH и PUSCH и периоду времени между PUSCH и PHICH, заданным в конфигурации TDD первой соты, соответственно. Это подробно описывается ниже со ссылкой на фиг. 28.
[265] Фиг. 28 является схемой, иллюстрирующей первый и второй периоды времени, согласно варианту осуществления настоящего изобретения. В частности, фиг. 28 показывает периоды времени передачи/приема сигналов в TDD-системе, работающей с двумя агрегированными компонентными несущими, т.е. CC1 2810 в конфигурации #1 нисходящей-восходящей линии связи TDD и CC2 2820 в конфигурации #2 нисходящей-восходящей линии связи. Хотя фиг. 28 направлен на случай, в котором периоды времени радиокадра CC1 2810 и CC2 2820 согласуются друг с другом, eNB и/или UE, поддерживающие HARQ, могут работать в случае, в котором периоды времени не согласуются на двух различных компонентных несущих.
[266] На фиг. 28, предполагается, что PDCCH для перекрестной диспетчеризации несущих PUSCH, который должен быть передан на PUSCH, передается на CC1 2810 в качестве первой компонентной несущей. Кроме того, предполагается, что как CC1 2810, так и CC2 2820 имеют длительности субкадра восходящей линии связи, когда передается PUSCH. В частности, субкадр 7 2840 CC1 2810 является субкадром восходящей линии связи, и субкадр 7 2870 i-того радиокадра, в котором передается PUSCH, также является субкадром восходящей линии связи.
[267] Согласно интервалу 2882, применяемому посредством периода времени между PDCCH (или PHICH) и PUSCH в таблице 3, заданному для конфигурации #1 нисходящей-восходящей линии связи TDD, PDCCH для диспетчеризации PUSCH субкадра 7 2840 i-того радиокадра передается в субкадре 1 2830 i-того субкадра. Согласно интервалу 2884, применяемому посредством периода времени между PUSCH и PHICH в таблице 3, заданному для конфигурации #1 нисходящей-восходящей линии связи TDD, PHICH, соответствующий PUSCH, переносимому в субкадре 7 2840 i-того радиокадра, передается в субкадре 1 2850 (i+1)-го радиокадра.
[268] Согласно интервалу 2886, применяемому посредством периода времени между PDCCH (или PHICH) и PUSCH в таблице 2, заданному для конфигурации #2 нисходящей-восходящей линии связи TDD, PDCCH для диспетчеризации PUSCH, переносимого в субкадре 7 2870 i-того радиокадра, передается в субкадре 3 2860 i-того радиокадра. Кроме того, согласно интервалу 2888, применяемому посредством периода времени между PUSCH и PHICH в таблице 3, заданному для конфигурации #2 нисходящей-восходящей линии связи TDD, PHICH, соответствующий PUSCH, переносимому в субкадре 7 2870 i-того радиокадра, может быть передан в субкадре 3 2880 (i+1)-го радиокадра.
[269] Согласно варианту осуществления настоящего изобретения, когда необходимо выполнять перекрестную диспетчеризацию несущих для передачи PUSCH UE в субкадре 7 2870 i-того радиокадра на CC2 2830, eNB работает так, как когда PUSCH передается на CC1 2810, так что первый период времени согласуется с периодом времени между PDCCH (или PHICH) и PUSCH в конфигурации #1 нисходящей-восходящей линии связи TDD. Соответственно, PDCCH для перекрестной диспетчеризации несущих PUSCH, который должен быть передан в субкадре 7 2870 i-того субкадра на CC2 2820, передается в субкадре 1 2830 i-того радиокадра. На фиг. 28 описание приведено при допущении, что как CC1 2810, так и CC2 2820 переносят специальные субкадры. Тем не менее, субкадр, переносящий PDCCH на CC1 2810, может быть специальным субкадром или субкадром нисходящей линии связи. В период времени, когда PDCCH передается на CC1 2810, CC2 2820 может переносить специальный субкадр, субкадр нисходящей линии связи или субкадр восходящей линии связи.
[270] PHICH, соответствующий PUSCH, подвергнутому перекрестной диспетчеризации несущих посредством PDCCH на CC1 2810 и передаваемому посредством UE на CC2 2820, передается на CC1 2810, на которой передан PDCCH. eNB работает так, как когда PUSCH передается на CC1 2810, с тем чтобы согласовывать второй период времени с периодом времени между PUSCH и PHICH в соответствии с конфигурацией #1 нисходящей-восходящей линии связи TDD для CC1 2810. Соответственно, HARQ ACK/NACK, соответствующее PUSCH, передаваемому в субкадре 7 2870 i-того радиокадра CC2 2820, передается через PHICH в субкадре 1 2850 (i+1)-го радиокадра CC1 2810.
[271] Когда передается PDCCH для диспетчеризации адаптивной повторной передачи PUSCH, PDCCH передается в субкадре 1 2850 (i+1)-го радиокадра CC1 2810, который равен периоду времени PHICH. На фиг. 28 описание приведено при допущении, что как CC1 2810, так и CC2 2820 переносят специальные субкадры в период времени, когда передается PHICH или PDCCH для диспетчеризации адаптивной повторной передачи. Тем не менее, субкадр CC1 2810 для передачи PHICH или PDCCH для диспетчеризации адаптивной повторной передачи может быть специальным субкадром или субкадром нисходящей линии связи. Кроме того, в то время как PHICH или PDCCH для диспетчеризации адаптивной повторной передачи передается на CC1 2810, CC2 2820 может переносить специальный субкадр, субкадр нисходящей линии связи или субкадр восходящей линии связи.
[272] Фиг. 29 является блок-схемой последовательности операций, иллюстрирующей процедуру eNB в способе HARQ, согласно варианту осуществления настоящего изобретения. Фиг. 29 направлена на случай, в котором субкадр, переносящий PUSCH на второй компонентной несущей, является субкадром восходящей линии связи, при этом субкадр первой компонентной несущей также является субкадром восходящей линии связи.
[273] eNB может определять то, активировать ли перекрестную диспетчеризацию несущих в определенный период времени, на этапе 2901. Если определяется активация перекрестной диспетчеризации несущих, eNB может передавать PDCCH для перекрестной диспетчеризации несущих PUSCH второй компонентной несущей на первой компонентной несущей согласно периоду времени диспетчеризации между PDCCH (или PHICH) и PUSCH, который задается на первой компонентной несущей, на этапе 2902.
[274] eNB может принимать PUSCH, передаваемый посредством UE, на второй компонентной несущей согласно периоду времени между PDCCH (или PHICH) и PUSCH первой компонентной несущей, на этапе 2903. eNB декодирует PUSCH, чтобы определять то, следует ли передавать ACK/NACK, на этапе 2904.
[275] Если декодирование PUSCH завершается неудачно, так что передается NACK на этапе 2904, eNB может передавать PHICH и/или PDCCH для диспетчеризации адаптивной повторной передачи, согласно периоду времени между PUSCH и PHICH, который задается на первой компонентной несущей, на этапе 2905. eNB может принимать повторную передачу PUSCH на второй компонентной несущей, на которой выполнена начальная передача, на этапе 2906.
[276] Если декодирование PUSCH успешно выполняется, так что передается ACK на этапе 2904, eNB может передавать PHICH согласно периоду времени HARQ ACK/NACK, заданному на первой компонентной несущей, на этапе 2907.
[277] При возвращении на этап 2901, если определяется деактивация перекрестной диспетчеризации несущих, например, определяется передача PDCCH для диспетчеризации PUSCH, который должен быть передан на первой компонентной несущей, eNB может передавать PDCCH, переносящий DCI для диспетчеризации PUSCH, в UE, на этапе 2908.
[278] eNB может принимать PUSCH в период времени приема PUSCH, заданный в унаследованном стандарте (например, LTE/LTE-A) на компонентной несущей, на которой передан PDCCH, на этапе 2909. eNB может передавать PHICH или PDCCH для адаптивной повторной передачи на основе результата декодирования PUSCH согласно периоду времени, заданному в унаследованном стандарте, на этапе 2910.
[279] eNB декодирует принимаемый PUSCH, чтобы определять то, следует ли передавать ACK/NACK, на этапе 2911. Если определяется передача ACK, eNB может диспетчеризовать новые данные или завершает процедуру. Если определяется передача NACK, процедура возвращается к этапу 2909, чтобы принимать повторную передачу PUSCH.
[280] Фиг. 30 является блок-схемой последовательности операций, иллюстрирующей процедуру UE в способе HARQ, согласно варианту осуществления настоящего изобретения. Фиг. 30 направлен на случай, в котором субкадр, переносящий PUSCH на второй компонентной несущей, является субкадром восходящей линии связи, при этом субкадр первой компонентной несущей также является субкадром восходящей линии связи.
[281] Ссылаясь на фиг. 30, UE принимает PDCCH на этапе 3001. UE декодирует PDCCH, чтобы определять то, активирована ли перекрестная диспетчеризация несущих, на этапе 3002.
[282] Если определено то, что перекрестная диспетчеризация несущих активирована, UE передает PUSCH на второй компонентной несущей, указываемой посредством индикатора несущей, на этапе 3003. PUSCH передается согласно периоду времени между PDCCH (или PHICH) и PUSCH, который задается на первой компонентной несущей.
[283] UE принимает PHICH или PDCCH на первой компонентной несущей согласно периоду времени между PUSCH и PHICH, который задается на первой компонентной несущей, на этапе 3004. UE определяет то, следует ли повторно передавать PUSCH, на основе принимаемого PHICH и/или PDCCH, на этапе 3005. Если определяется не передавать повторно PUSCH, UE может завершать процедуру для поддержки HARQ согласно варианту осуществления настоящего изобретения.
[284] Если определяется повторно передавать PUSCH, UE повторно передает PUSCH на второй компонентной несущей, на которой выполнена начальная передача, на этапе 3006. Повторная передача соответствует периоду времени диспетчеризации между PDCCH (или PHICH) и PUSCH, который задается на первой компонентной несущей.
[285] Возвращаясь к этапу 3002, если определено то, что перекрестная диспетчеризация несущих деактивирована, UE может передавать, в eNB, PUSCH на компонентной несущей, на которой передан PDCCH, на этапе 3007. Период времени передачи PUSCH может соответствовать взаимосвязи периодов времени между PDCCH и PUSCH, которая задается для компонентной несущей в унаследованном стандарте (например, LTE/LTE-A).
[286] UE может принимать PHICH и/или PDCCH на компонентной несущей, на которой передан PUSCH, согласно взаимосвязи периодов времени между PUSCH и PHICH/PDCCH, которая задается в унаследованном стандарте, на этапе 3008. UE может определять то, следует ли повторно передавать PUSCH, на основе информации, переносимой в принимаемом PHICH и/или PDCCH, на этапе 3009. Если определяется повторно передавать PUSCH, процедура возвращается к этапу 3007. Если определяется не передавать повторно PUSCH, UE завершает операцию для поддержки HARQ, согласно варианту осуществления настоящего изобретения.
[287] eNB и UE могут конфигурироваться так, как показано на фиг. 18 и 19.
[288] Способы согласно вышеописанным вариантам осуществления могут быть реализованы в форме программной команды, выполняемой посредством различных компьютерных средств, и сохранены на машиночитаемых запоминающих носителях. Машиночитаемые запоминающие носители могут хранить программные команды, файлы данных и структуры данных в отдельных или комбинированных формах. Программные команды, записанные на запоминающий носитель, могут быть разработаны и реализованы для настоящего изобретения или использованы специалистами области компьютерного программного обеспечения.
[289] Хотя изобретение показано и описано со ссылкой на его конкретные варианты осуществления, специалисты в данной области техники должны понимать, что различные изменения по форме и содержанию могут осуществляться без отступления от сущности и объема изобретения, заданных посредством прилагаемой формулы изобретения.
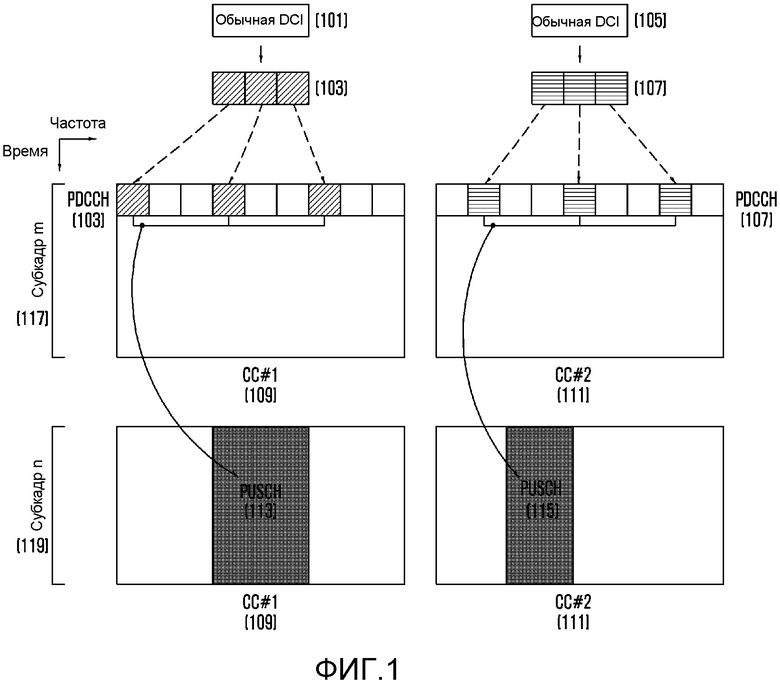
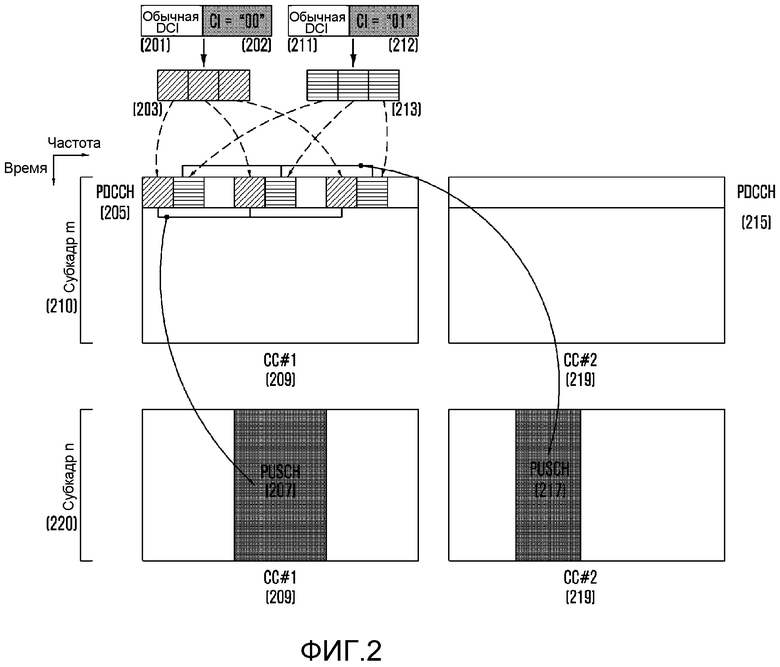
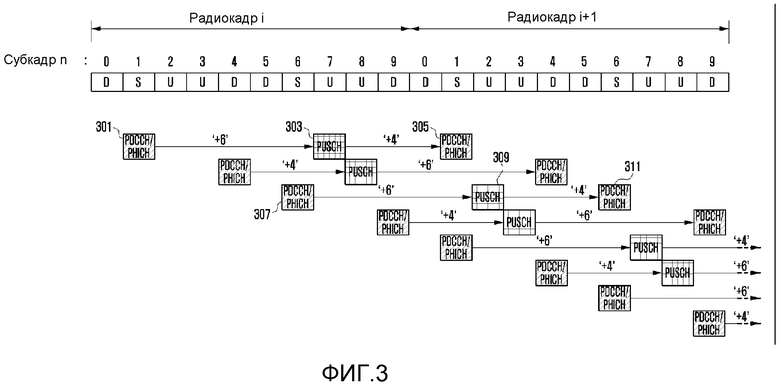
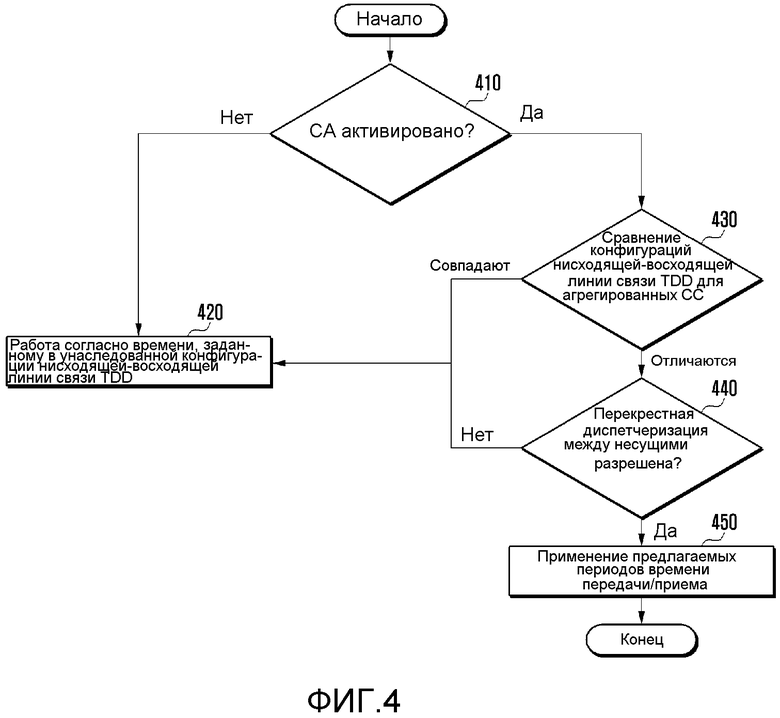
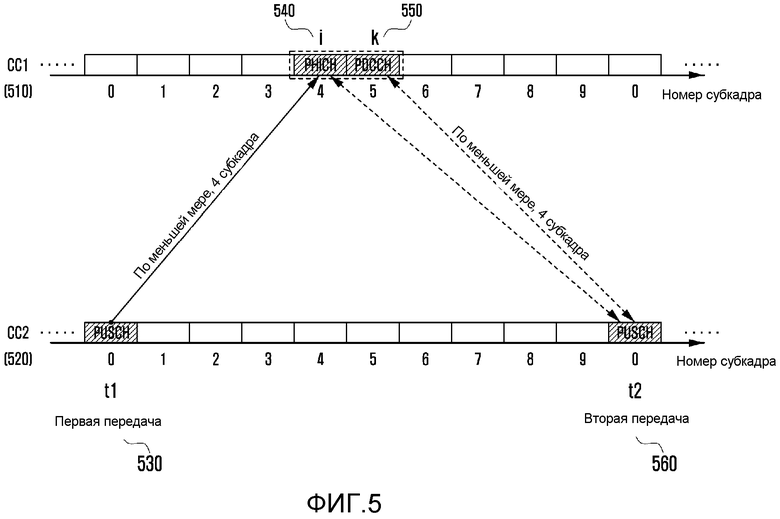
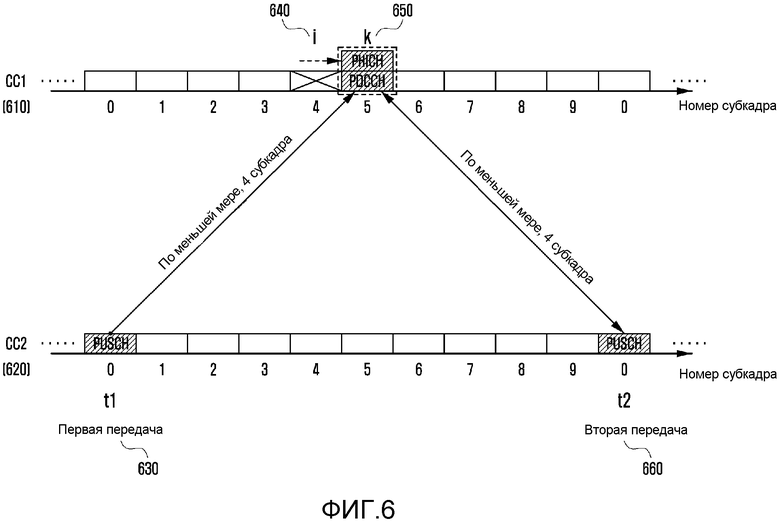
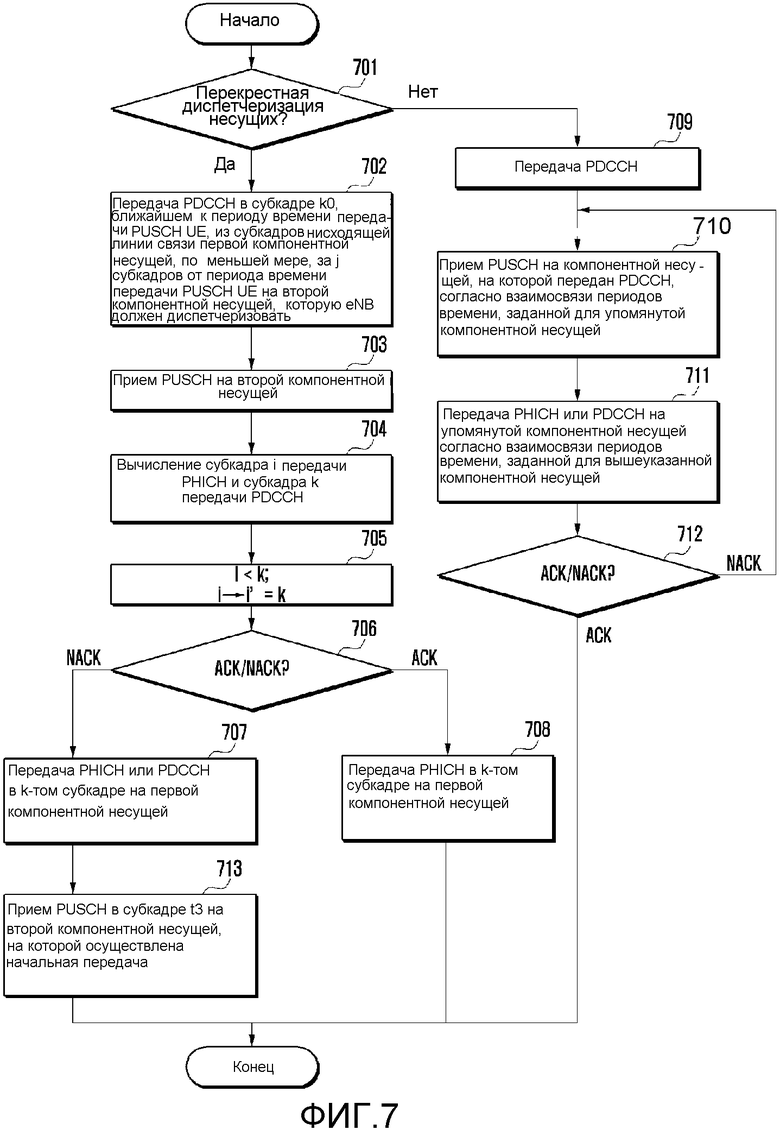
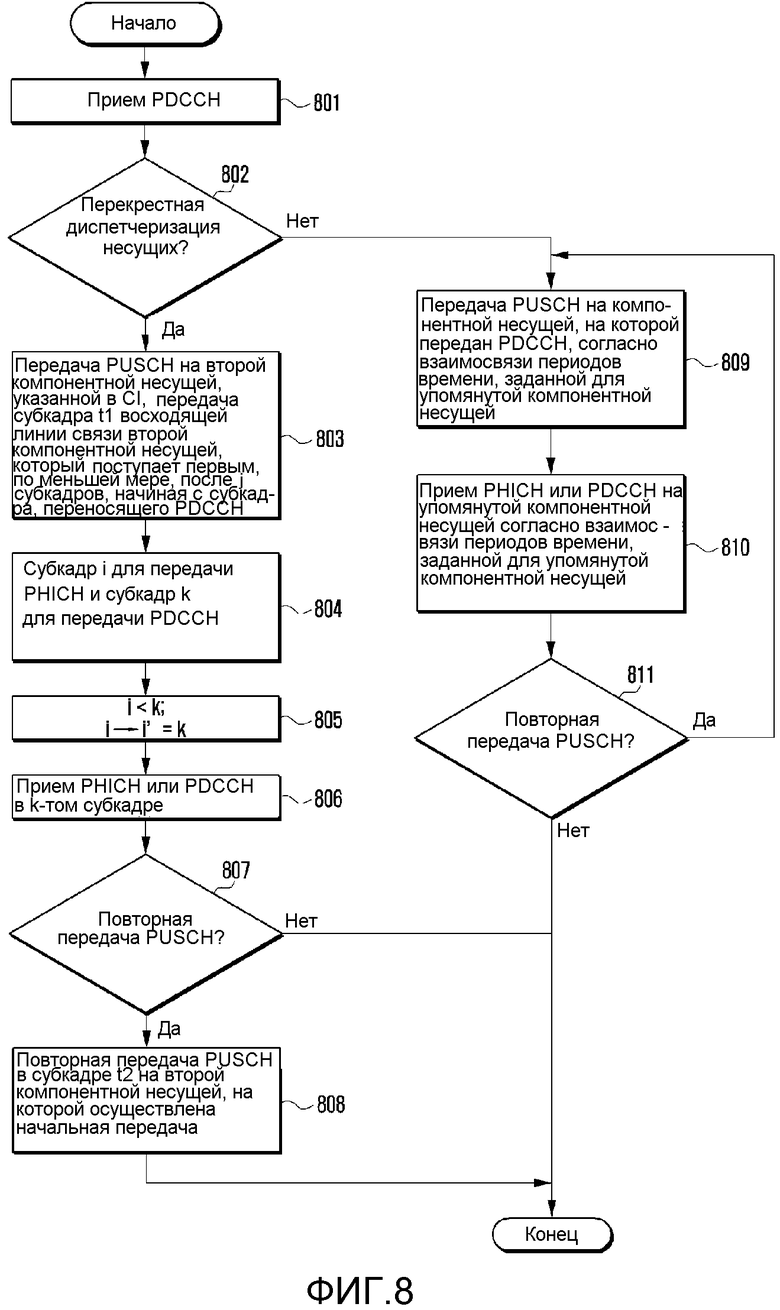
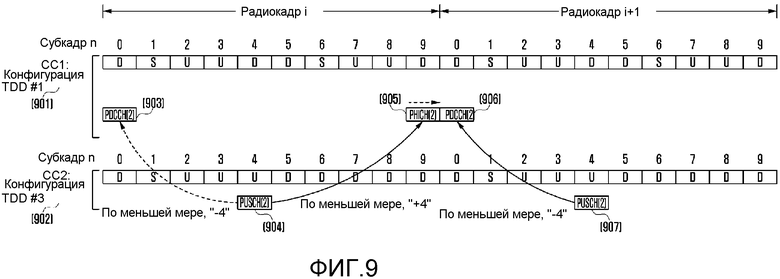
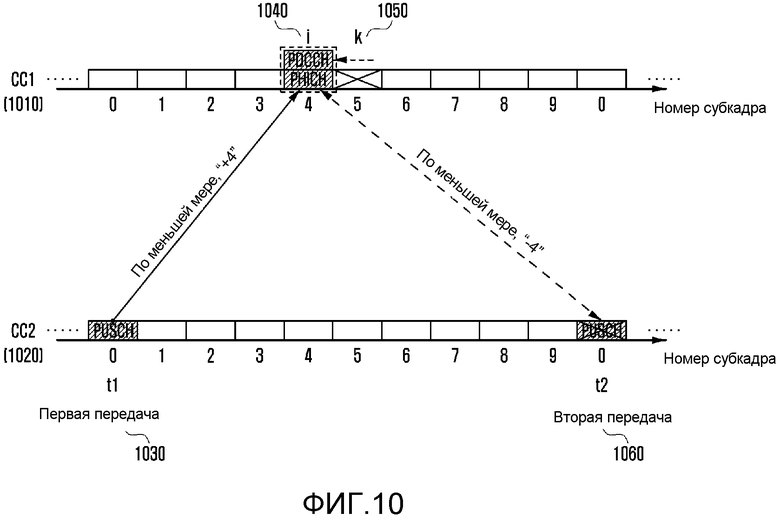
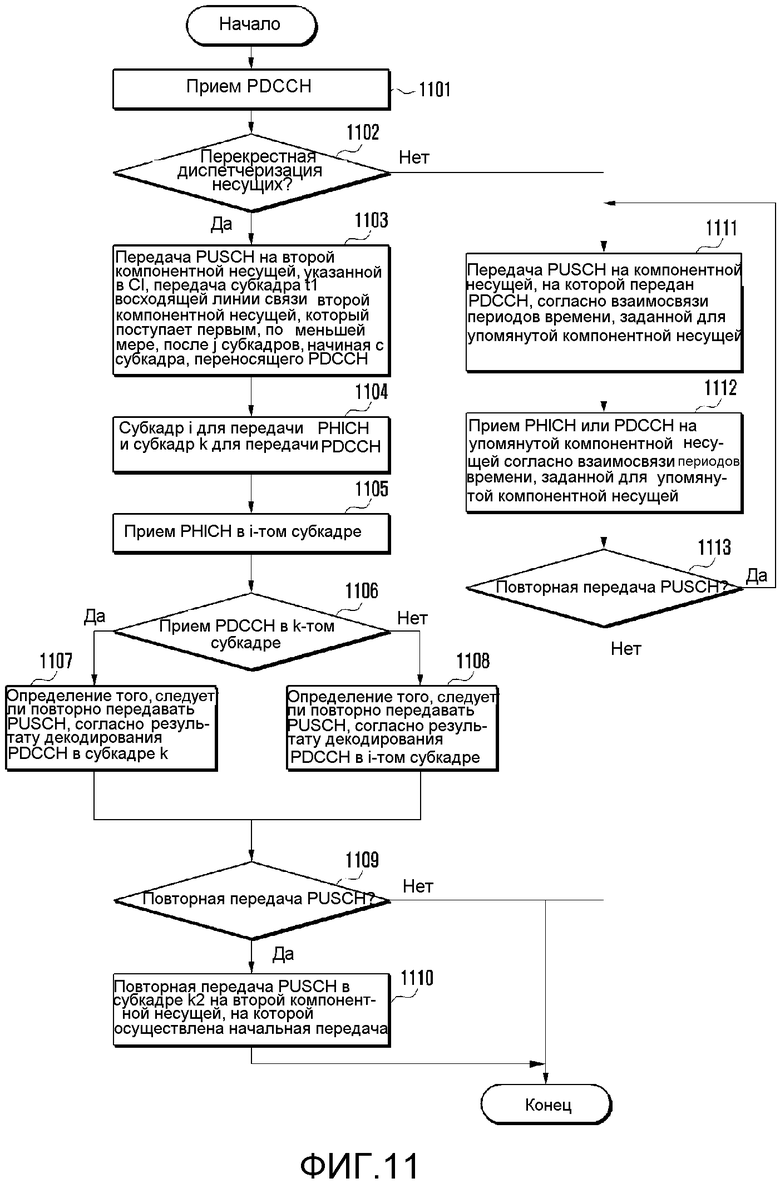
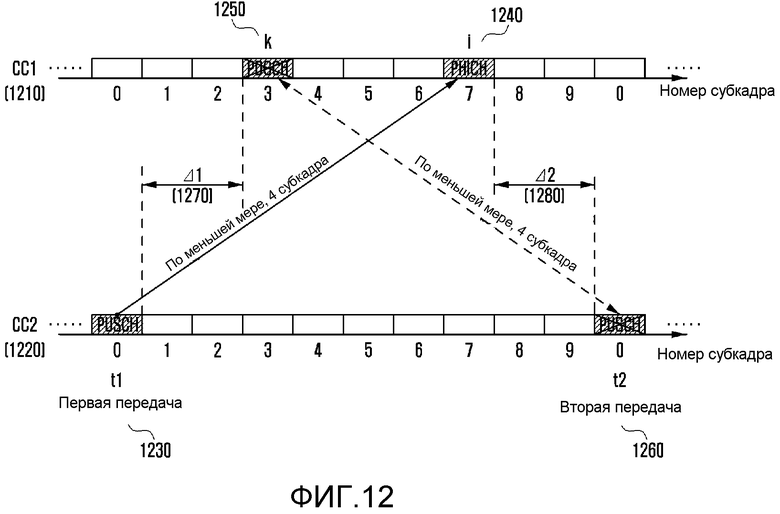
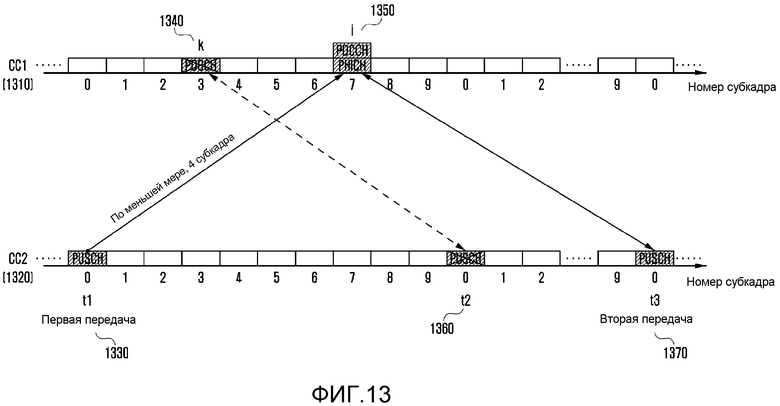
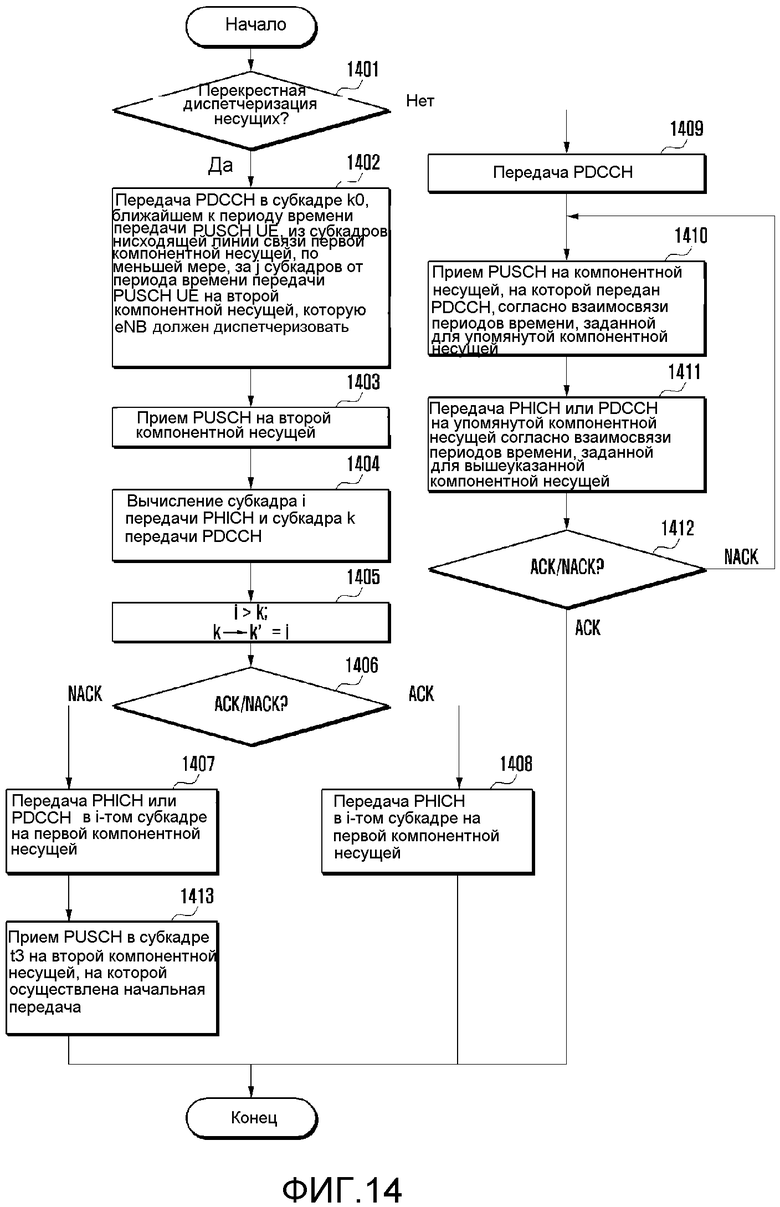
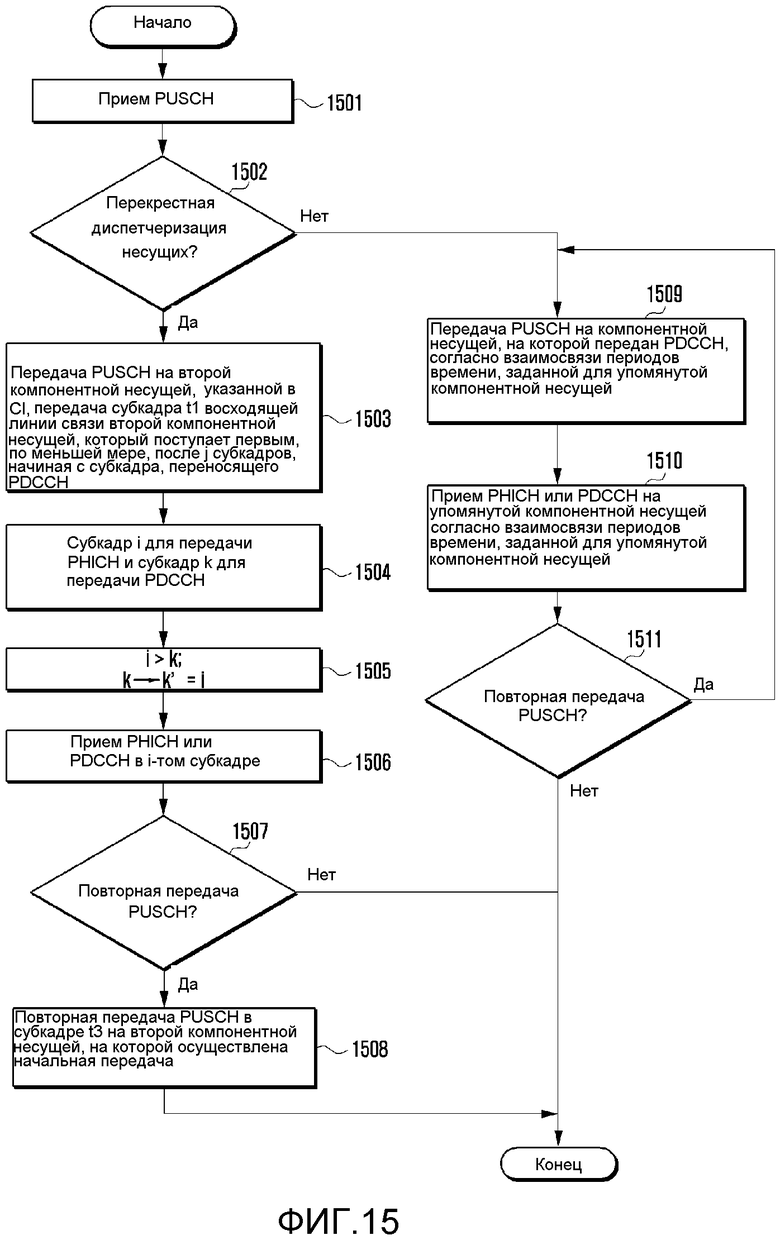
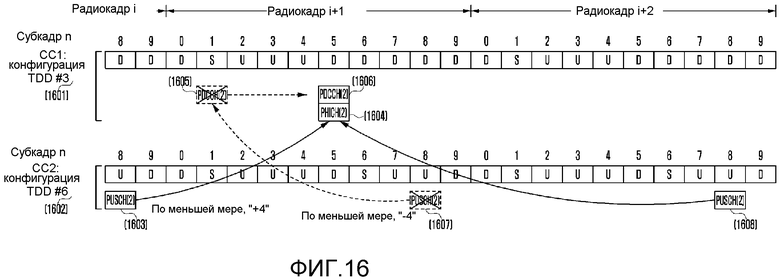
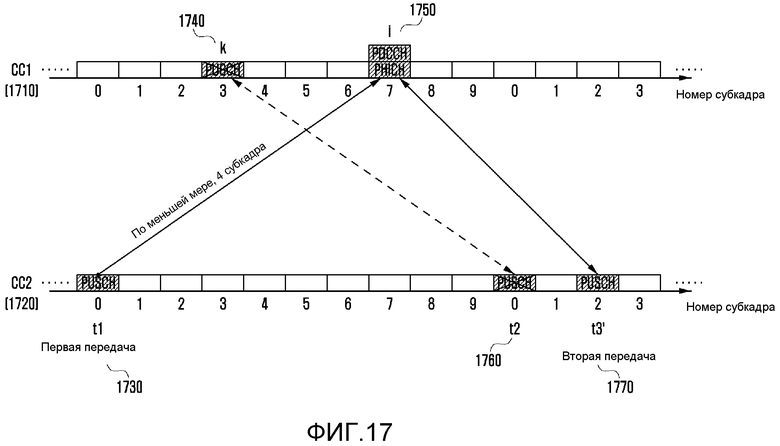
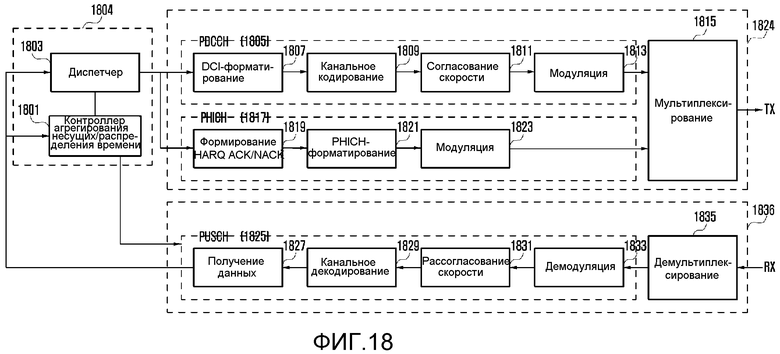
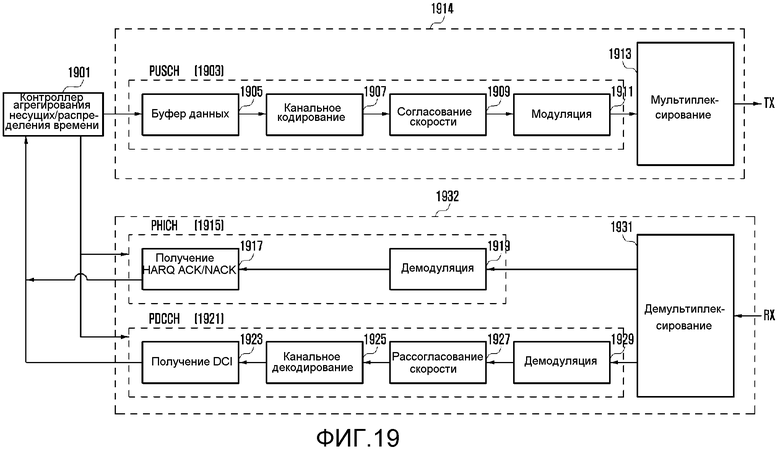
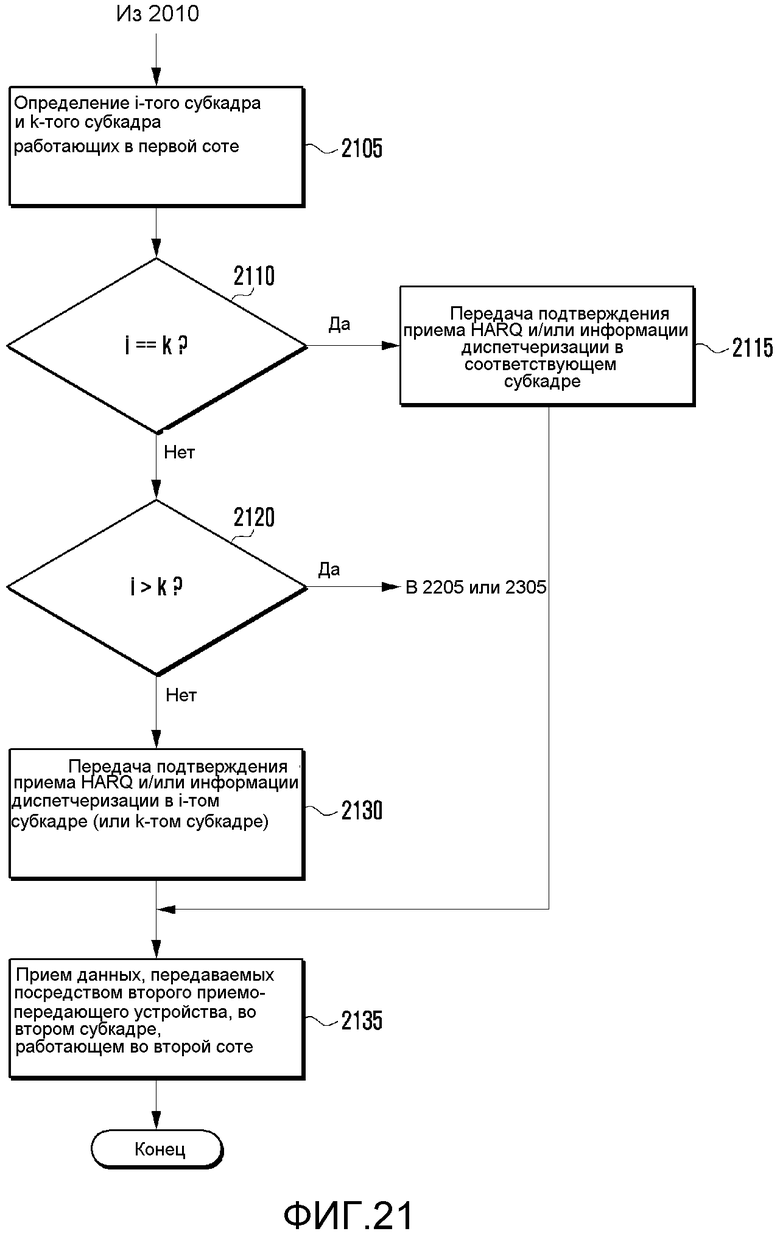
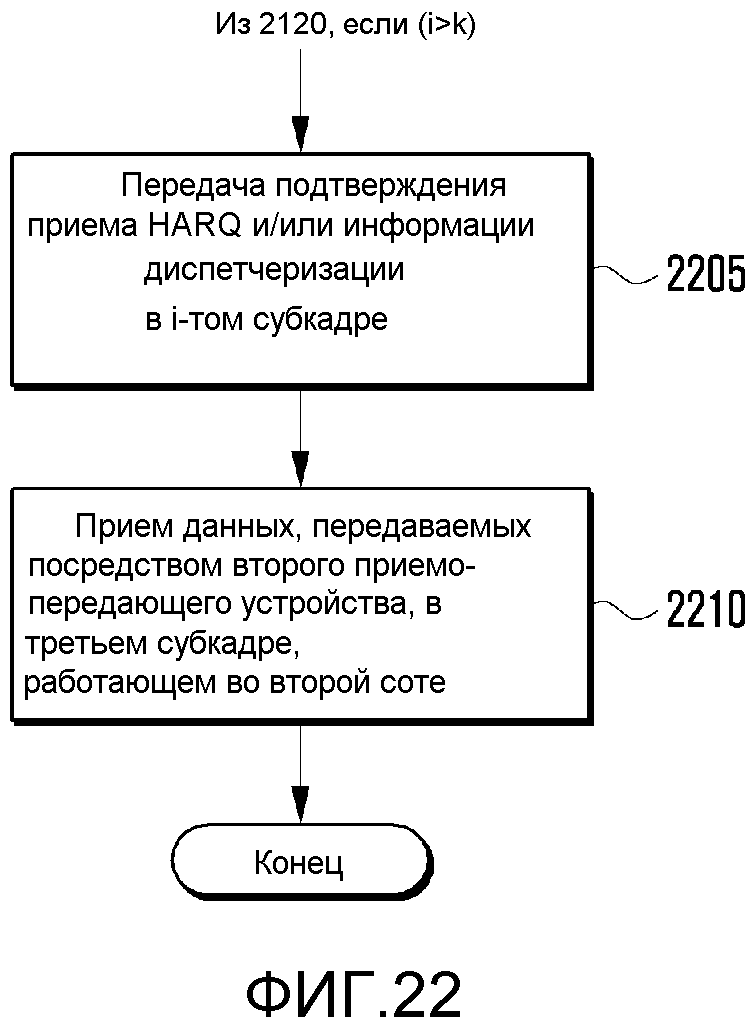
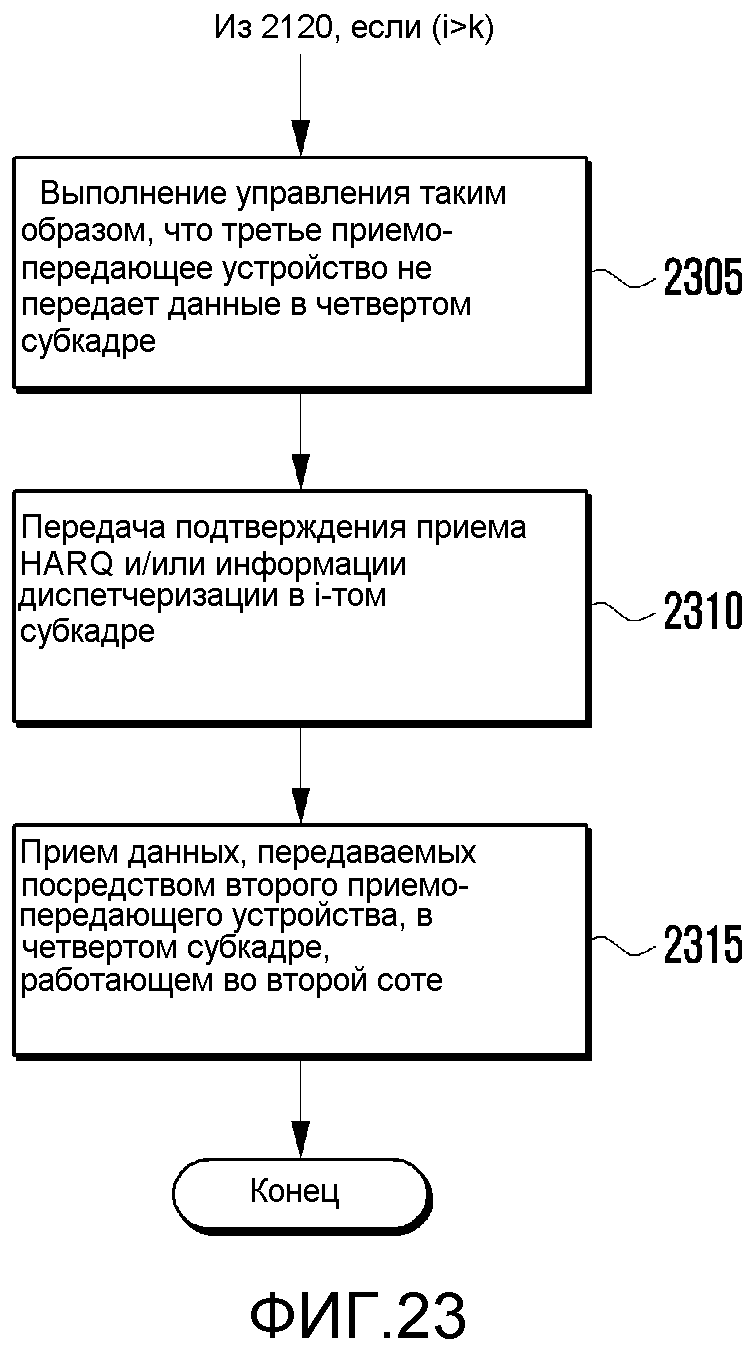
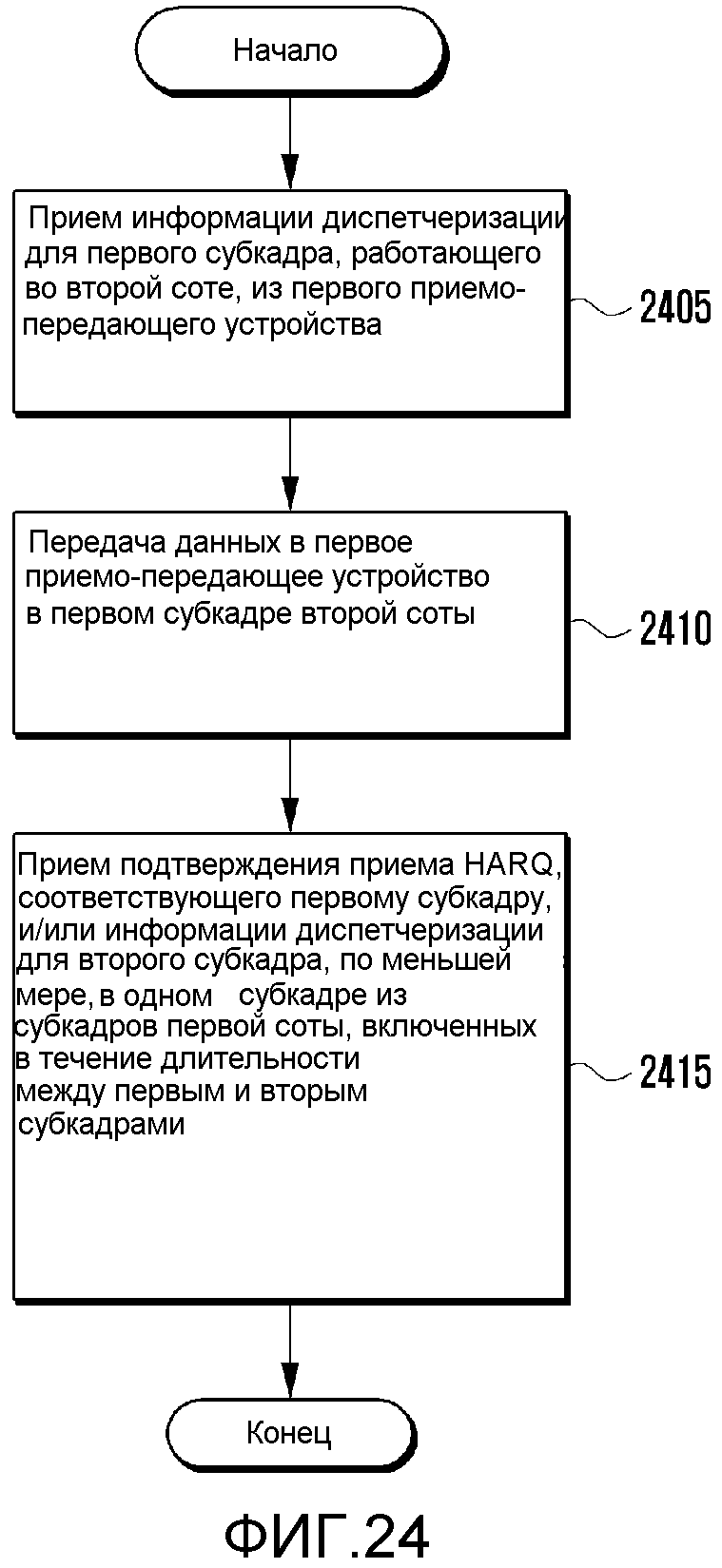
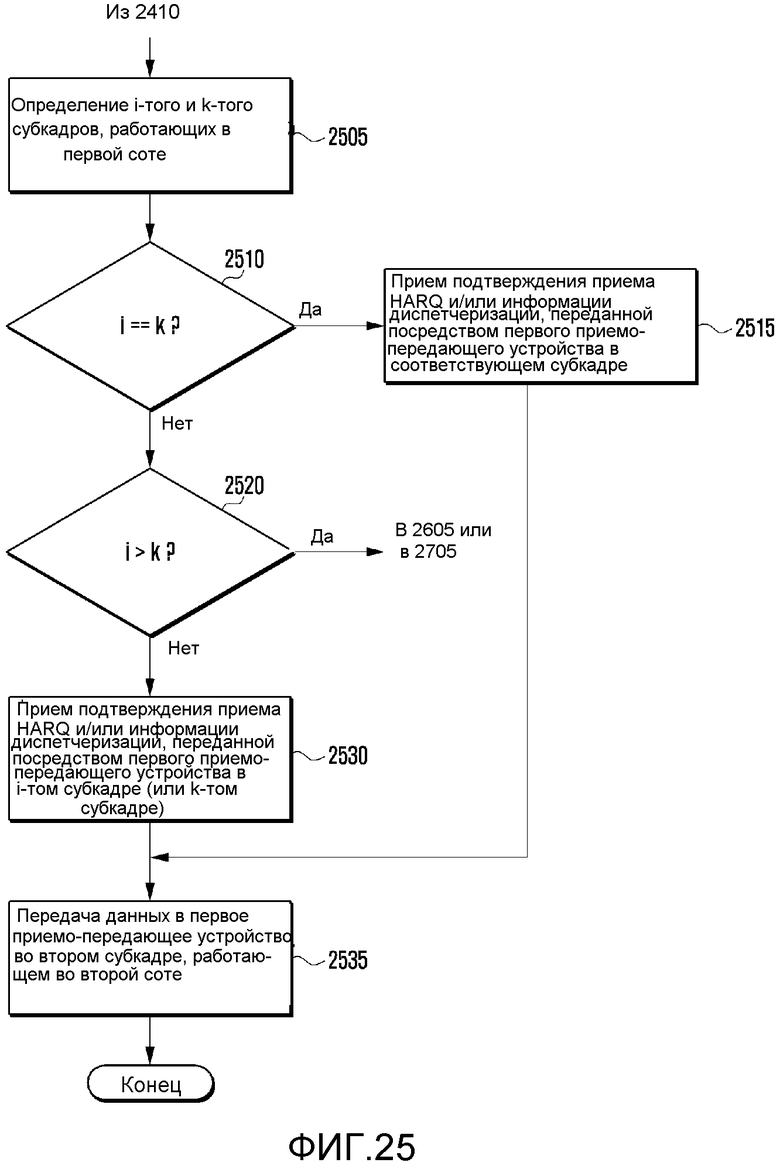
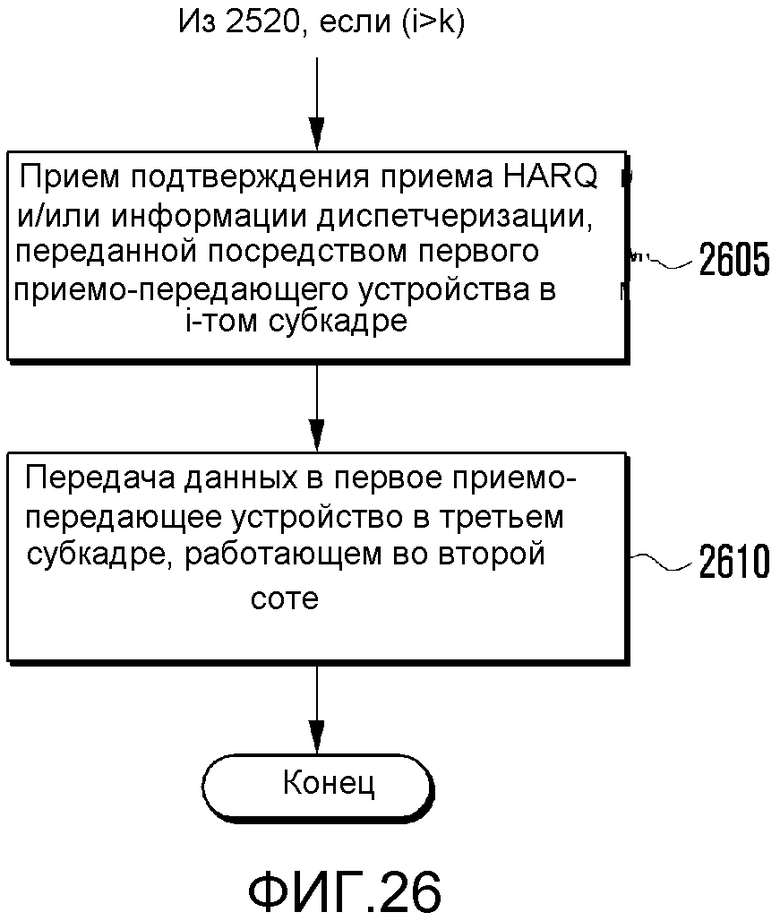
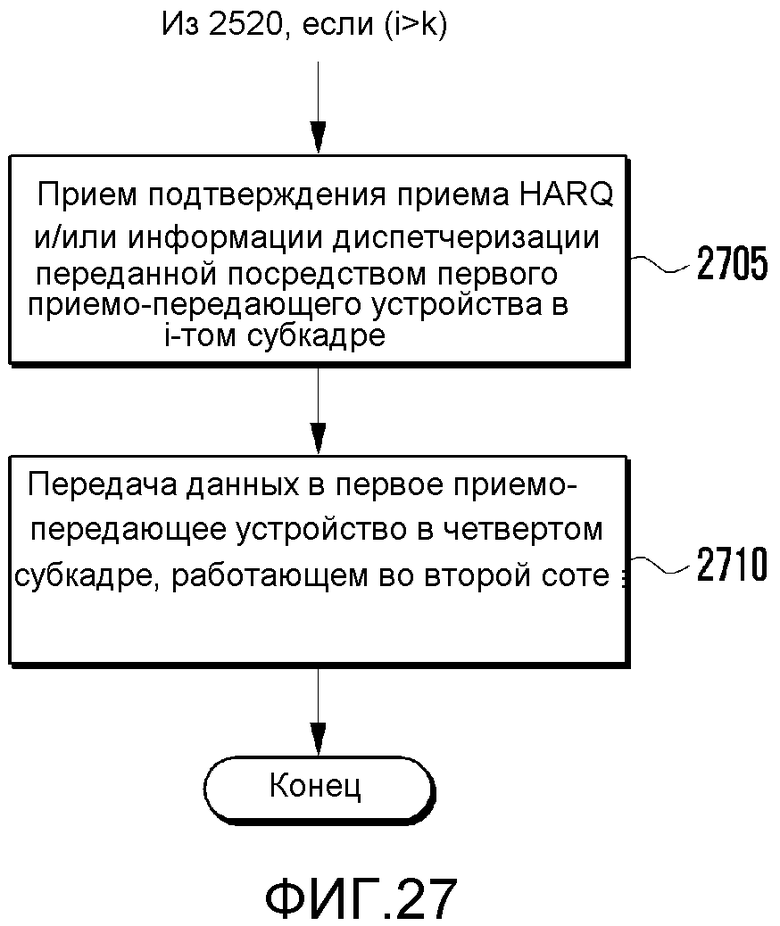
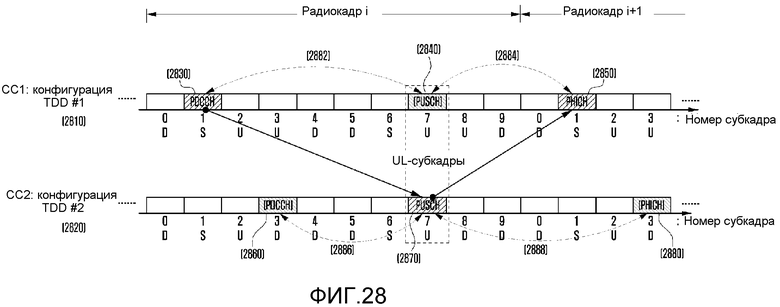
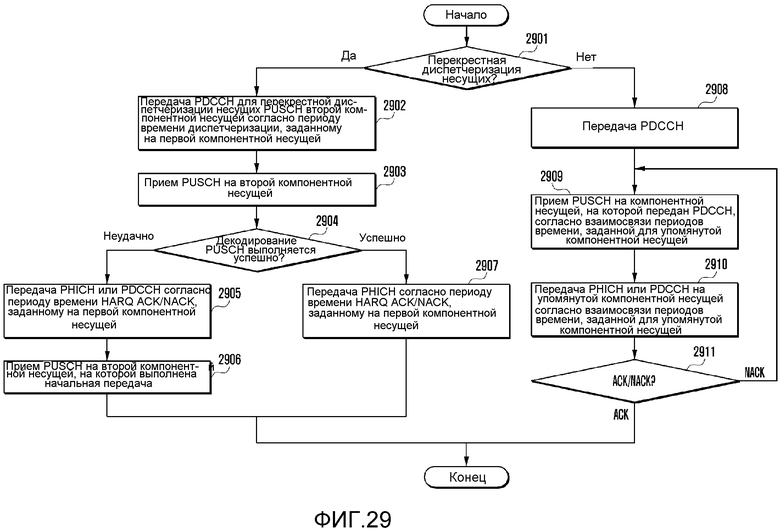
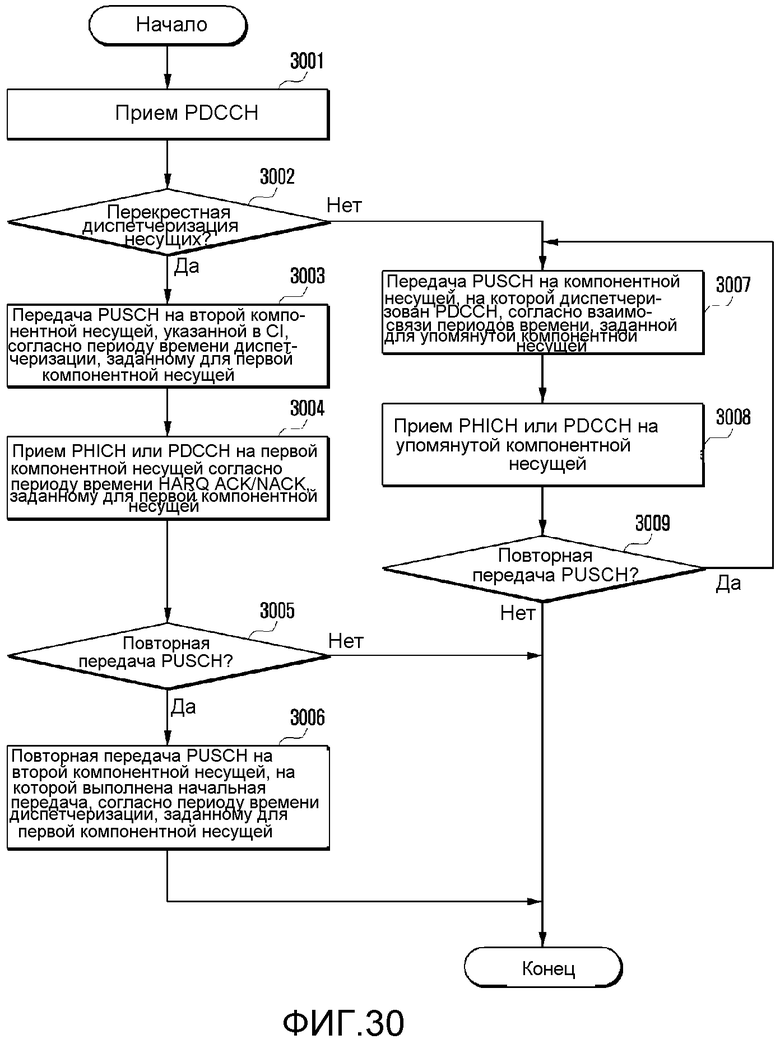
Изобретение относится к области связи. Техническим результатом является повышение эффективности связи. Предоставляются способы и устройства для того, чтобы поддерживать HARQ в системе связи, применяющей перекрестную диспетчеризацию несущих. Вторая сота диспетчеризуется в первой соте. Принимаются данные, передаваемые посредством терминала, в субкадре второй соты. Определяется субкадр, в первой соте, для передачи подтверждения приема HARQ, соответствующего данным, и определяется субкадр, в первой соте, переносящий информацию диспетчеризации второй соты. Определяется то, являются ли идентичными субкадр для передачи подтверждения приема HARQ и субкадр, переносящий информацию диспетчеризации второй соты. 4 н. и 12 з.п. ф-лы, 30 ил., 3 табл.
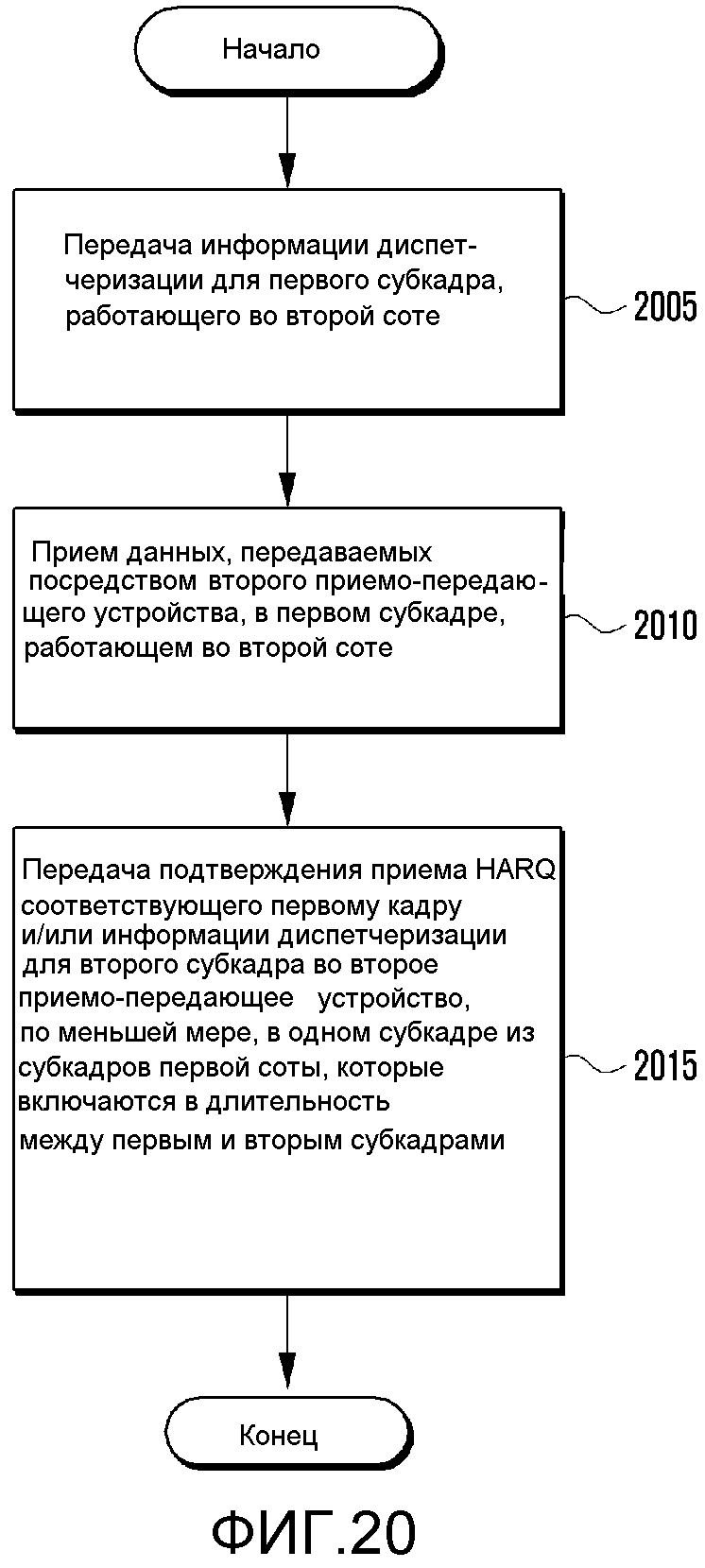
1. Способ связи базовой станции, поддерживающей гибридный автоматический запрос на повторную передачу (HARQ) в системе связи, использующей перекрестную диспетчеризацию несущих, причем способ связи содержит этапы, на которых:
- диспетчеризуют, в первой соте, вторую соту;
- принимают данные, передаваемые посредством терминала, в субкадре второй соты;
- определяют субкадр, в первой соте, для передачи подтверждения приема HARQ, соответствующего данным, и субкадр, в первой соте, переносящий информацию диспетчеризации второй соты;
- определяют то, являются ли идентичными субкадр для передачи подтверждения приема HARQ и субкадр, переносящий информацию диспетчеризации второй соты; и
- когда субкадр для передачи подтверждения приема HARQ и субкадр, переносящий информацию диспетчеризации, не являются идентичными, согласуют субкадр для передачи подтверждения приема HARQ и субкадр, переносящий информацию диспетчеризации второй соты, друг с другом.
2. Способ связи по п. 1, в котором согласование субкадров содержит, когда субкадр для передачи подтверждения приема HARQ находится раньше субкадра, переносящего информацию диспетчеризации второй соты, этап, на котором задают субкадр для передачи подтверждения приема HARQ как субкадр, переносящий информацию диспетчеризации второй соты, или задают субкадр, переносящий информацию диспетчеризации второй соты, как субкадр для передачи подтверждения приема HARQ.
3. Способ связи по п. 1, в котором согласование субкадров содержит, когда субкадр, переносящий информацию диспетчеризации второй соты, находится раньше субкадра для передачи подтверждения приема HARQ, этап, на котором задают субкадр, переносящий информацию диспетчеризации второй соты, как субкадр для передачи подтверждения приема HARQ, при этом субкадр, переносящий данные из терминала согласно информации диспетчеризации второй соты, имеет период времени, идентичный субкадру второй соты, при приеме данных.
4. Способ связи по п. 1, в котором согласование субкадров содержит, когда субкадр, переносящий информацию диспетчеризации второй соты, находится раньше субкадра для передачи подтверждения приема HARQ, этап, на котором задают субкадр, переносящий информацию диспетчеризации второй соты, как субкадр для передачи подтверждения приема HARQ, при этом субкадр, переносящий данные из терминала согласно информации диспетчеризации второй соты, является субкадром, появляющимся первым из субкадров, доступных для переноса данных из терминала.
5. Способ связи терминала, поддерживающего гибридный автоматический запрос на повторную передачу (HARQ) в системе связи, использующей перекрестную диспетчеризацию несущих, причем способ связи содержит этапы, на которых:
- передают данные в базовую станцию в субкадре второй соты, диспетчеризованной посредством первой соты; и
- принимают подтверждение приема HARQ, соответствующее данным, и информацию диспетчеризации для второй соты в согласованном субкадре в первой соте.
6. Способ связи по п. 5, в котором, когда субкадр, переносящий подтверждение приема HARQ, находится раньше субкадра, переносящего информацию диспетчеризации второй соты, согласованный субкадр является субкадром, переносящим информацию диспетчеризации второй соты, для которого задан субкадр, переносящий подтверждение приема HARQ, или субкадром, переносящим подтверждение приема HARQ, для которого задан субкадр, переносящий информацию диспетчеризации второй соты.
7. Способ связи по п. 5, в котором согласованный субкадр является субкадром, переносящим информацию диспетчеризации второй соты, для которого задан субкадр, переносящий подтверждение приема HARQ, когда субкадр, переносящий информацию диспетчеризации второй соты, находится раньше субкадра, переносящего подтверждение приема HARQ, при этом субкадр, переносящий данные из терминала согласно информации диспетчеризации второй соты, имеет период времени, идентичный субкадру второй соты, при передаче данных.
8. Способ связи по п. 5, в котором согласованный субкадр является субкадром, переносящим подтверждение приема HARQ, для которого задан субкадр, переносящий информацию диспетчеризации второй соты, когда субкадр, переносящий информацию диспетчеризации второй соты, находится раньше субкадра, переносящего подтверждение приема HARQ, при этом субкадр, переносящий данные из терминала согласно информации диспетчеризации второй соты, является субкадром, появляющимся первым из субкадров, доступных для переноса данных из терминала.
9. Базовая станция, поддерживающая гибридный автоматический
запрос на повторную передачу (HARQ) в системе связи, использующей перекрестную диспетчеризацию несущих, причем базовая станция содержит:
- приемо-передающее устройство, которое передает и принимает данные, по меньшей мере, через одну из первой соты и второй соты; и
- контроллер, который диспетчеризует вторую соту посредством первой соты, принимает данные, передаваемые посредством терминала, в субкадре второй соты, определяет субкадр, в первой соте, для передачи подтверждения приема HARQ, соответствующего данным, и субкадр, в первой соте, переносящий информацию диспетчеризации второй соты, определяет то, являются ли идентичными субкадр для передачи подтверждения приема HARQ и субкадр, переносящий информацию диспетчеризации второй соты, и когда субкадр для передачи подтверждения приема HARQ и субкадр, переносящий информацию диспетчеризации, не являются идентичными, согласует субкадр для передачи подтверждения приема HARQ и субкадр, переносящий информацию диспетчеризации второй соты, друг с другом.
10. Базовая станция по п. 9, в которой, когда субкадр для передачи подтверждения приема HARQ находится раньше субкадра, переносящего информацию диспетчеризации второй соты, контроллер задает субкадр для передачи подтверждения приема HARQ как субкадр, переносящий информацию диспетчеризации второй соты, или задает субкадр, переносящий информацию диспетчеризации второй соты, как субкадр для передачи подтверждения приема HARQ.
11. Базовая станция по п. 9, в которой, когда субкадр,
переносящий информацию диспетчеризации второй соты, находится раньше субкадра для передачи подтверждения приема HARQ, контроллер задает субкадр, переносящий информацию диспетчеризации второй соты, как субкадр для передачи подтверждения приема HARQ, при этом субкадр, переносящий данные из терминала согласно информации диспетчеризации второй соты, имеет период времени, идентичный субкадру второй соты, при приеме данных.
12. Базовая станция по п. 9, в которой, когда субкадр, переносящий информацию диспетчеризации второй соты, находится раньше субкадра для передачи подтверждения приема HARQ, контроллер задает субкадр, переносящий информацию диспетчеризации второй соты, как субкадр для передачи подтверждения приема HARQ, при этом субкадр, переносящий данные из терминала согласно информации диспетчеризации второй соты, является субкадром, появляющимся первым из субкадров, доступных для переноса данных из терминала.
13. Терминал, поддерживающий гибридный автоматический запрос на повторную передачу (HARQ) в системе связи, использующей перекрестную диспетчеризацию несущих, причем терминал содержит:
- приемо-передающее устройство, которое передает и принимает данные, по меньшей мере, через одну из первой соты и второй соты; и
- контроллер, который принимает подтверждение приема HARQ, соответствующее данным, и информацию диспетчеризации для второй соты в согласованном субкадре в первой соте,
при этом вторая сота диспетчеризуется посредством первой
соты.
14. Терминал по п. 13, в котором, когда субкадр, переносящий подтверждение приема HARQ, находится раньше субкадра, переносящего информацию диспетчеризации второй соты, согласованный субкадр является субкадром, переносящим информацию диспетчеризации второй соты, для которого задан субкадр, переносящий подтверждение приема HARQ, или субкадром, переносящим подтверждение приема HARQ, для которого задан субкадр, переносящий информацию диспетчеризации второй соты.
15. Терминал по п. 13, в котором согласованный субкадр является субкадром, переносящим информацию диспетчеризации второй соты, для которого задан субкадр, переносящий подтверждение приема HARQ, когда субкадр, переносящий информацию диспетчеризации второй соты, находится раньше субкадра, переносящего подтверждение приема HARQ, при этом субкадр, переносящий данные из терминала согласно информации диспетчеризации второй соты, имеет период времени, идентичный субкадру второй соты, при передаче данных.
16. Терминал по п. 13, в котором согласованный субкадр является субкадром, переносящим подтверждение приема HARQ, для которого задан субкадр, переносящий информацию диспетчеризации второй соты, когда субкадр, переносящий информацию диспетчеризации второй соты, находится раньше субкадра, переносящего подтверждение приема HARQ, при этом субкадр, переносящий данные из терминала согласно информации диспетчеризации второй соты, является субкадром, появляющимся первым из субкадров, доступных для переноса данных из терминала.
| WO 2011005032 A2, 13.01.2011 | |||
| RU 2007137025 A, 20.04.2009 | |||
| RU 2009111229 A, 10.10.2010 | |||
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |

