Предлагаемое изобретение относится к области сельского хозяйства и может найти применение при выращивании преимущественно ветроопыляемых сельскохозяйственных культур.
Особенность возделывания сельскохозяйственных культур состоит в том, что для получения полноценного урожая растения нуждаются в перекрестном опылении - переносе пыльцы с одного растения на другое. У ветроопыляемых культур (злаковые зерновые - пшеница, рожь и др.) перекрестное опыление растений производится за счет переноса пыльцы ветром. При цветении ветроопыляемых культур в сухую безветренную погоду, характерную для весенней засухи, пыльца с цветков осыпается и не попадает на соседние растения, это приводит к пустозерности колосьев и снижению урожайности. У насекомоопыляемых растений (гречиха, подсолнечник и др.) перенос пыльцы производят насекомые (шмели, пчелы, мухи). Однако количество насекомых не всегда бывает достаточным для опыления растений на больших площадях производственных посевов. Недостаточное опыление растений приводит к снижению урожайности.
С целью повышения урожайности сельскохозяйственных культур осуществляют искусственное опыление растений.
Известен способ опыления растений с помощью устройства, включающего шарнирную сцепку нескольких секций, опирающуюся на колеса, и смонтированные на секциях рабочие органы в виде рамки или мешковины. Эту сцепку перемещают с помощью транспортного средства по полю. В процессе движения по полю рабочие органы пригибают верхушки растений и переносят пыльцу с одних растений на другие (Пат. РФ №2448458, МПК А01Н 1/02, 27.04.2012).
Недостатками этого способа опыления являются уменьшение посевной площади в связи с необходимостью прокладки дорожек для движения транспортного средства и опорных колес секций, а также повреждение растений рабочими органами сцепки, что ведет к снижению урожая.
Известен способ опыления растений, реализуемый устройством, включающим летательный аппарат с закрепленной на подвеске волокушей. При реализации способа летательный аппарат транспортирует волокушу на большой скорости по поверхности растений, производя стряхивание и перенос пыльцы (Ав. св. СССР №470287, МКИ А01Н 1/02, Бюл. №18, 1975 г.). Данное техническое решение принято в качестве прототипа.
Недостатками этого способа является опасность повреждения растений волокушей, а также снижение качества опыления из-за высокой скорости обработки, не позволяющей учитывать микрорельеф поля. Поэтому в повышенных местах волокуша будет ломать растения, а в понижениях недостаточно контактировать с ними.
Все известные способы искусственного опыления растений и устройства для их осуществления основываются на непосредственном контакте с растениями, что приводит к значительным потерям урожайности.
Устранить указанные недостатки позволяет предлагаемый способ искусственного опыления растений, включающий стряхивание пыльцы с растений и ее перенос по полю, в котором с помощью управляемого малого беспилотного летательного аппарата, например типа коптер, с рабочим оборудованием создают над поверхностью растений турбулентный поток воздуха, которым осуществляют стряхивание, захват и перенос пыльцы по мере движения коптера над полем без непосредственного контакта устройства с растениями.
Реализовать предлагаемый способ искусственного опыления растений позволяет устройство, включающее управляемое летательное средство с рабочим оборудованием для сбивания пыльцы с растений и ее переноса на другие растения, в котором летательное средство представляет собой управляемый малый беспилотный аппарат, например типа коптер, с видеокамерой, снабженный подвеской в виде двух штанг и коленчатого вала между ними, несущего группу пропеллеров и связанного тягой с эксцентриковым механизмом, установленным на валу электрического привода с контроллером дистанционного управления.
Новый технический результат от реализации предложенного способа искусственного опыления растений с помощью предлагаемого устройства состоит в том, что формируемый над поверхностью растений турбулентный поток воздуха стряхивает пыльцу с растений, захватывает ее и переносит на другие растения по мере движения коптера над полем. Благодаря отсутствию непосредственного контакта подвески с установленным на ней оборудованием с поверхностью растений исключается возможность их повреждения. Кроме того, управляемый коптер с видеокамерой перемещается над полем с регулируемой скоростью на небольшой высоте, что позволяет учитывать микрорельеф поля и производить более качественное опыление растений по всей его площади.
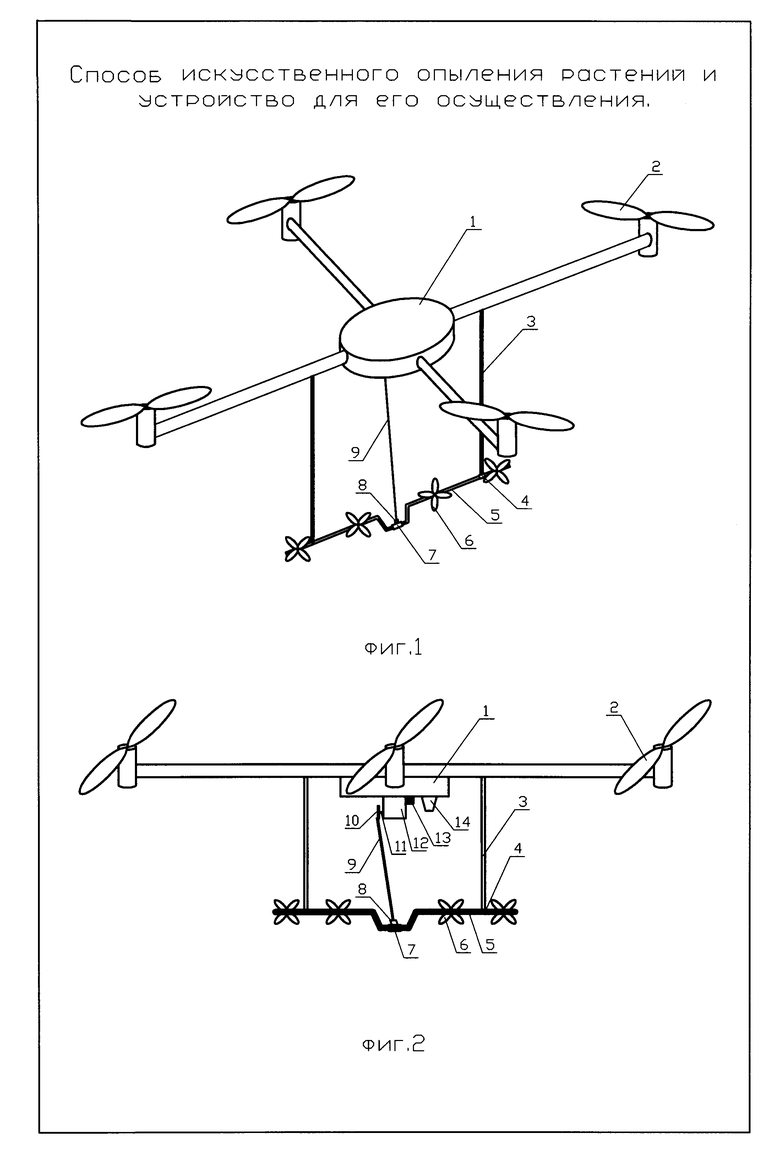
Сущность предложения поясняется чертежом, где на фиг. 1 представлен общий вид устройства, на фиг. 2 - механизм поворота коленчатого вала с пропеллерами.
Устройство для реализации предложенного способа включает коптер 1, снабженный несущими винтами 2. На корпусе коптера закреплены подвески 3, на концах которых в подшипниках 4 смонтирован коленчатый вал 5 с пропеллерами 6. К средней части вала 5 с помощью втулки 7 и шарнира 8 присоединена тяга 9, сопряженная с эксцентриком 10, установленным на валу 11 электропривода 12, связанного с контроллером дистанционного управления 13. На нижней поверхности коптера 1 установлена видеокамера 14.
Предлагаемый способ искусственного опыления растений с помощью предлагаемого устройства осуществляется следующим образом:
Оператор с помощью пульта управления запускает оснащенный рабочим оборудованием коптер 1 над полем на высоте 0,3-0,5 м от поверхности растений. В процессе его движения над растениями несущие винты 2 создают воздушный поток, направленный вниз. Посредством эксцентрика 10, закрепленного на валу 11 электродвигателя 12 и связанной с ним через шарнир 8 и подшипник 7 тяги 9, поворачивают коленчатый вал 5, располагая пропеллеры 6 под углом к направлению движения. При этом набегающие потоки воздуха приводят пропеллеры 6 во вращение. Вращающиеся пропеллеры 6 создают поток воздуха, направленный под углом к вертикальному потоку от несущих винтов 2. При этом над поверхностью растений создается турбулентное движение воздуха, стряхивающее с них пыльцу, подхватывающее ее и перемещающее по полю вдоль трассы горизонтального полета коптера 1. Видеокамера 14 позволяет оператору на пульте управления отслеживать в режиме реального времени процесс передвижения коптера и эффективность переноса пыльцы и путем подачи управляющего сигнала с пульта на контроллер дистанционного управления 13 регулировать работу устройства, изменяя положение пропеллеров 6, скорость горизонтального полета коптера 1 и высоту над поверхностью растений. При достижении коптером края поля его ориентируют в обратном направлении со смещением на ширину обработанной полосы.
Таким образом, предлагаемый способ искусственного опыления растений с помощью предлагаемого устройства обеспечивает повышение качества опыления посевов на больших площадях без повреждения растений, а также повышение производительности самого процесса.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПЫЛЕНИЯ РАСТЕНИЙ | 2016 |
|
RU2620075C1 |
| ОРОСИТЕЛЬНАЯ СЕТЬ | 2016 |
|
RU2620008C1 |
| Способ мелкодисперсного дождевания | 2018 |
|
RU2684746C1 |
| Комплекс беспилотных летательных средств на базе аэростатического летательного аппарата | 2020 |
|
RU2734661C1 |
| СПОСОБ ДООПЫЛЕНИЯ РАСТЕНИЙ | 2010 |
|
RU2447650C1 |
| Устройство для искусственного опыления растений | 1972 |
|
SU470287A1 |
| СПОСОБ БИОМЕЛИОРАЦИИ ЗАСОЛЕННЫХ СУХОСТЕПНЫХ, ПОЛУПУСТЫННЫХ ЗЕМЕЛЬ В ЗОНЕ ВЕТРОВОЙ ЭРОЗИИ И КОМБИНИРОВАННЫЙ АГРЕГАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2760480C1 |
| УСТРОЙСТВО ДЛЯ ДООПЫЛЕНИЯ РАСТЕНИЙ | 2014 |
|
RU2571337C1 |
| УСТРОЙСТВО ДЛЯ ДООПЫЛЕНИЯ РАСТЕНИЙ | 2010 |
|
RU2447649C1 |
| СПОСОБ БИОМЕЛИОРАЦИИ МАЛОПРОДУКТИВНЫХ ЛУГОВ И ДЕГРАДИРОВАННОЙ ПАШНИ ОРОСИТЕЛЬНЫХ СИСТЕМ | 2018 |
|
RU2691572C1 |
Изобретение относится к области сельского хозяйства. Изобретение представляет собой устройство для осуществления способа искусственного опыления ветроопыляемых растений, представляющее собой управляемый малый беспилотный летательный аппарат, например типа коптер, с видеокамерой, где беспилотный летательный аппарат снабжен подвеской в виде двух штанг и коленчатого вала между ними, несущего группу пропеллеров и связанного тягой с эксцентриковым механизмом, установленным на валу электрического привода с контроллером дистанционного управления, и способ искусственного опыления ветроопыляемых растений, включающий стряхивание пыльцы с растений и ее перенос по полю, где с помощью управляемого малого беспилотного летательного аппарата, вращающиеся пропеллеры которого располагают под углом к направлению движения, создают над поверхностью растения турбулентный поток воздуха, которым осуществляют стряхивание, захват и перенос пыльцы по мере движения коптера над полем без непосредственного контакта устройства с растениями. Предлагаемый способ искусственного опыления растений с помощью предлагаемого устройства обеспечивает повышение качества опыления посевов. 2 н.п. ф-лы, 2 ил.
1. Устройство для осуществления способа искусственного опыления ветроопыляемых растений, представляющее собой управляемый малый беспилотный летательный аппарат, например типа коптер, с видеокамерой, отличающееся тем, что беспилотный летательный аппарат снабжен подвеской в виде двух штанг и коленчатого вала между ними, несущего группу пропеллеров и связанного тягой с эксцентриковым механизмом, установленным на валу электрического привода с контроллером дистанционного управления.
2. Способ искусственного опыления ветроопыляемых растений, включающий стряхивание пыльцы с растений и ее перенос по полю, отличающийся тем, что с помощью управляемого малого беспилотного летательного аппарата по п. 1, вращающиеся пропеллеры которого располагают под углом к направлению движения, создают над поверхностью растения турбулентный поток воздуха, которым осуществляют стряхивание, захват и перенос пыльцы по мере движения коптера над полем без непосредственного контакта устройства с растениями.
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С КОЛЕБАТЕЛЬНЫМ ЭЛЕМЕНТОМ | 2005 |
|
RU2290349C1 |
| КОРОЛЕВ В.А., и др., Техническая реализация элементов роботов в растениеводстве, Научно-технический прогресс в сельскохозяйственном производстве, Материалы Международной научно-практической конференции, Минск, 19-20 октября 2011, Том 1, Минск, 2011, с.134-139 | |||
| ГЛАВНЫЙ РЕДАКТОР ПРОХОРОВ А.М., Большая Советская | |||

