Данное изобретение относится к медицинским диагностическим ультразвуковым системам и, в частности, к ультразвуковым преобразователям, которые используют для управляемого нагревания организм тканей организма посредством фокусированного ультразвука высокой интенсивности, известного как HIFU.
Лечение доставляемой ультразвуком повышенной температурой используют для различных терапевтических целей. В HIFU лечении ультразвуковую энергию фокусируют в небольшом пятне внутри организма с тем, чтобы нагревать ткани до температуры, достаточной для того, чтобы создавать желаемый терапевтический эффект. Способ похож на литотрипсию, где сфокусированная энергия достаточно высока для того, чтобы разрушить камни в почках, но с использованием значительно меньшей энергии, которую доставляют в течение длительного времени вместо мгновенного импульса. HIFU способ можно использовать для того, чтобы избирательно разрушать нежелательную ткань внутри организма. Например, опухоли или другие патологические ткани можно разрушать посредством применения сфокусированной ультразвуковой энергии с тем, чтобы нагревать клетки до температуры, достаточной для того, чтобы некротизировать ткань, в целом приблизительно от 60 до приблизительно 80 °C, без разрушения смежных здоровых тканей. Другие способы лечения повышенной температурой включают избирательное нагревание тканей с тем, чтобы избирательно активировать лекарственное средство или содействовать некоторому другому физиологическому изменению в выбранной части организма субъекта.
HIFU преобразователи часто формируют в виде сферических или параболических зеркал с радиусом кривизны, который задает геометрическую фокальную точку преобразователя. См., например, HIFU преобразователь, описанный в международной патентной заявке IB2010/054985, которая подана 3 ноября 2010 года. Преобразователь, описанный в этой заявке, формируют из небольшого числа композитных керамических пьезоэлектрических плиток. Плитки изогнуты в двух измерениях с тем, чтобы они подгонялись друг к другу для формирования желательной сферической передающей поверхности с желательным геометрическим фокусом. Каждую плитку можно индивидуально изготавливать и тестировать перед сборкой, обеспечивая, что после сборки законченный преобразователь будет функционировать точно так, как определено. Такие композитные керамические пьезоэлектрические плитки могут проявлять эффективность преобразования энергии 80-85% во время передачи.
Когда клетки тканей разрушают посредством тепловых эффектов, в общем случае желательно избегать создания повышенных уровней ультразвуковой энергии, которые будут вызывать больше вредных эффектов, таких как кавитация. Следовательно, HIFU преобразователи часто содержат датчик кавитации, который используется, чтобы осуществлять мониторинг для подтверждения кавитации. Устойчивую и внутреннюю кавитацию можно обнаруживать посредством возникновения определенных уровней шума и гармонических сигналов, как описано в предварительной патентной заявке США № 61/392,067, озаглавленной «MONITORING AND CONTROL OF MICROBUBBLE CAVITATION IN THERAPEUTICAL ULTRASOUND» (Vignon et al.) См. также патент США 5827204 (Grandia et al.), в котором используют гидрофон для того, чтобы обнаруживать акустическое подтверждение кавитации. Датчик кавитации в целом прикреплен в центре HIFU преобразователя. Однако, когда HIFU преобразователь имеет сферическую или параболическую форму для фокусирования, обнаружено, что центр формы зеркала может принимать энергию и тепло, отраженные назад от поверхности раздела ванны преобразователя с текучим веществом и акустического окна. Это тепло и энергия могут фокусировать в центре HIFU преобразователя и повреждать датчик кавитации. Датчик кавитации, поврежденный или отраженной энергией или за счет дефекта во время процесса изготовления, может делать весь преобразователь неприемлемым, даже если сами HIFU элементы все еще полностью функциональны. Таким образом, желательно иметь возможность ремонтировать преобразователь и его датчик кавитации, чтобы избегать необходимости выбрасывать в остальном функциональный HIFU преобразователь.
В соответствии с принципами настоящего изобретения описан сферический HIFU преобразователь с модульно установленным датчиком кавитации. В описанной реализации крепление для датчика кавитации ввинчивают в отверстие в центре HIFU преобразователя и изолируют от выхода текучего вещества уплотнительным кольцом. Выполняют сигнальное соединение с контактными областями датчика кавитации посредством пружинных контактов, так что датчик кавитации можно заменять на новый датчик без необходимости пайки. Если датчик кавитации поврежден, крепление датчика можно отвинчивать и вставлять новый датчик вместо поврежденного датчика и ввинчивать в то же местоположение.
НА ЧЕРТЕЖАХ ПРЕДСТАВЛЕНО СЛЕДУЮЩЕЕ:
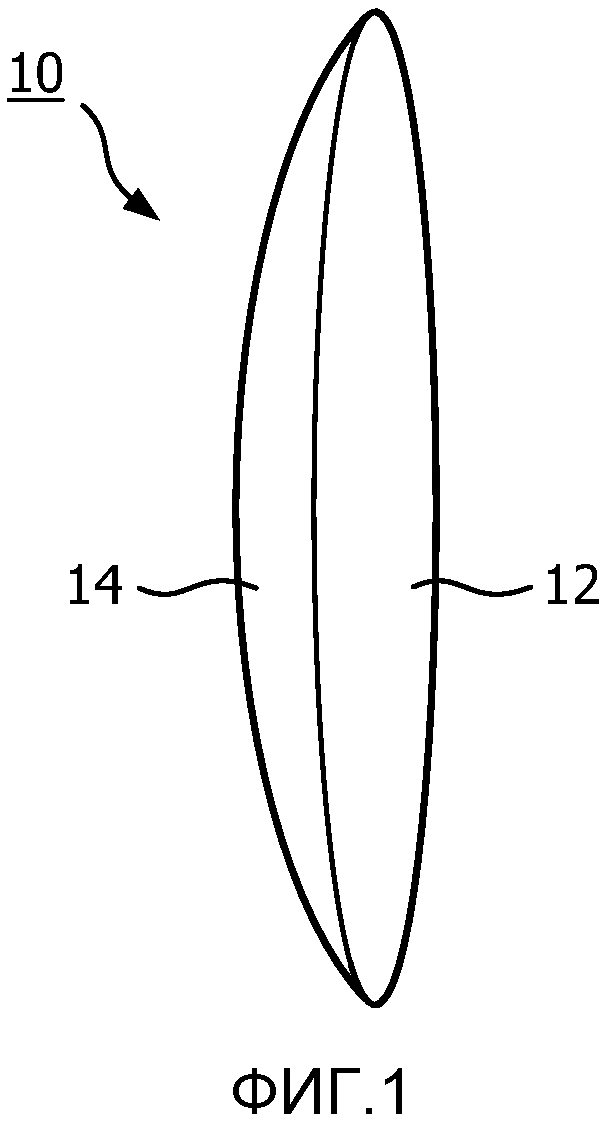
На фиг. 1 проиллюстрирован в перспективе согласующий слой сферического преобразователя, отдельно сформированный для HIFU преобразователя по настоящему изобретению.
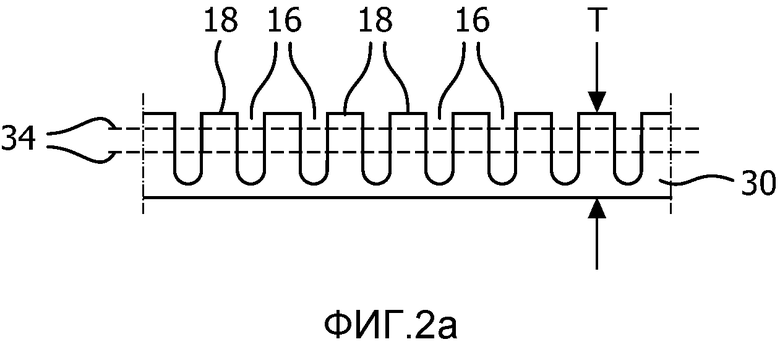
На фиг. 2a проиллюстрирован вид с торца листа керамического пьезоэлектрического материала, на котором нарезана сетка для формирования матрицы композитных преобразователей для HIFU преобразователя по настоящему изобретению.
На фиг. 2b проиллюстрирована матрица композитных преобразователей с немагнитными межслойными соединениями.
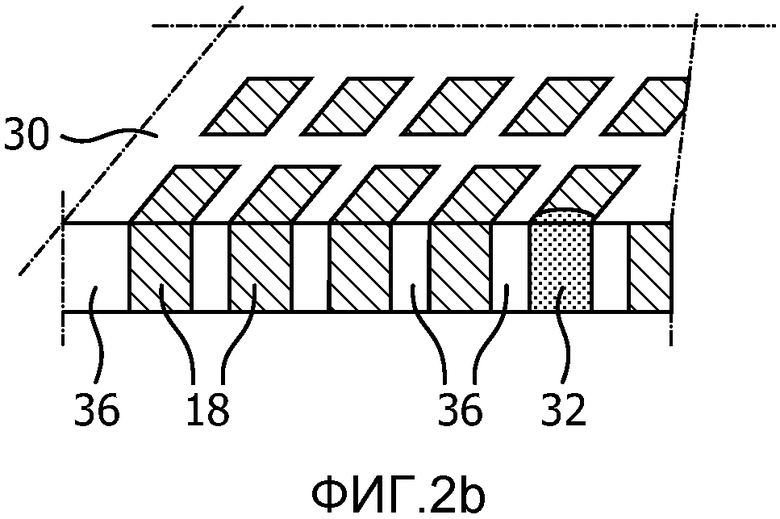
На фиг. 3 проиллюстрирована матрица композитных преобразователей с излучающими элементами и немагнитными переходными отверстиями.
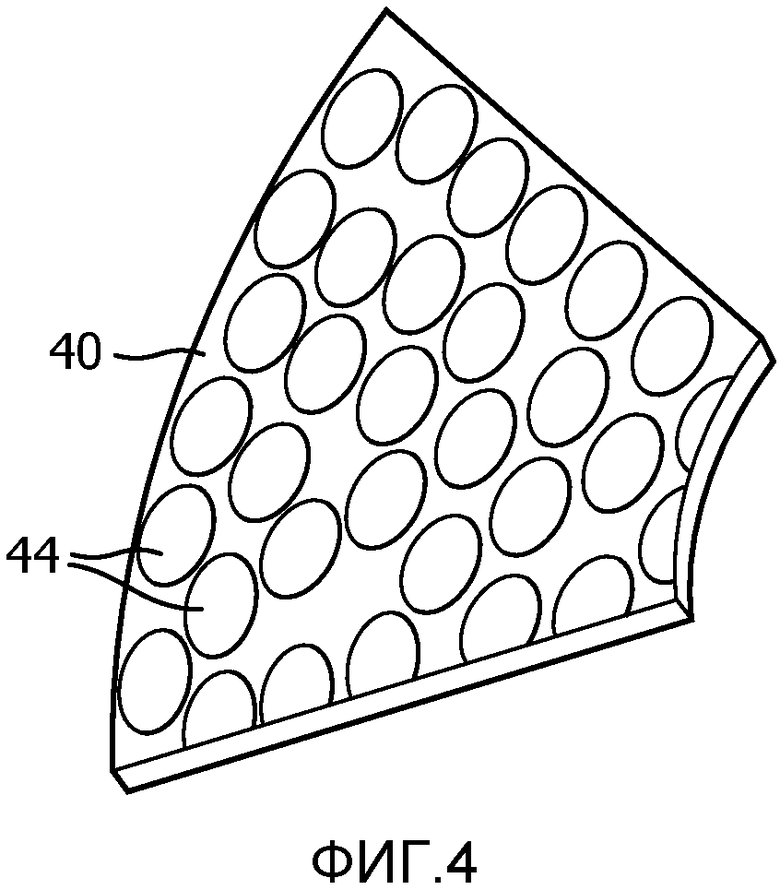
На фиг. 4 проиллюстрирована композитная пьезоэлектрическая плитка перед приданием сферической формы для HIFU преобразователя по настоящему изобретению.
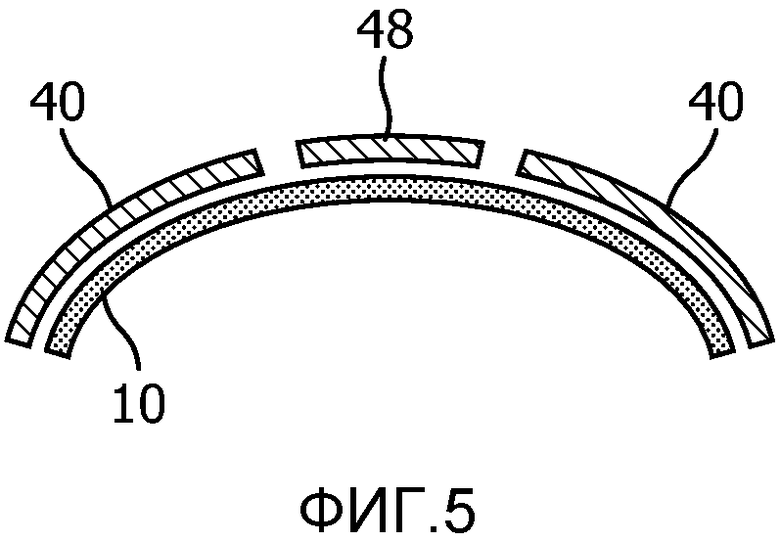
На фиг. 5 проиллюстрировано в поперечном сечении размещение композитных пьезоэлектрических плиток на согласующем слое для HIFU преобразователя по настоящему изобретению.
На фиг. 6 проиллюстрирована в перспективе задняя часть HIFU преобразователя из девяти плиток по настоящему изобретению.
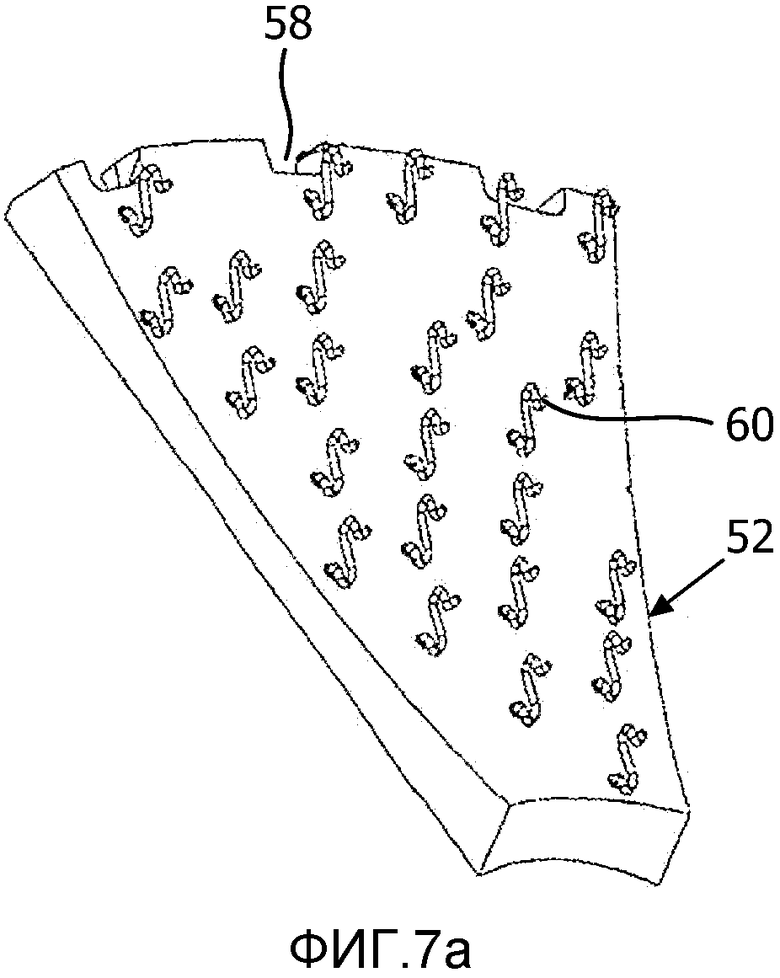
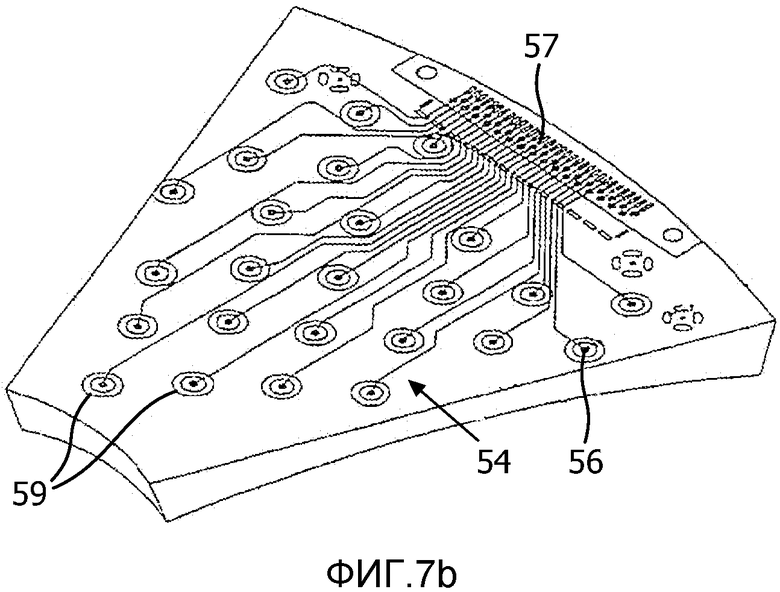
На фиг. 7a и 7b проиллюстрированы передняя и задняя поверхности изогнутой платы с печатной схемой с выступающими соответствующим контактами для HIFU преобразователя.
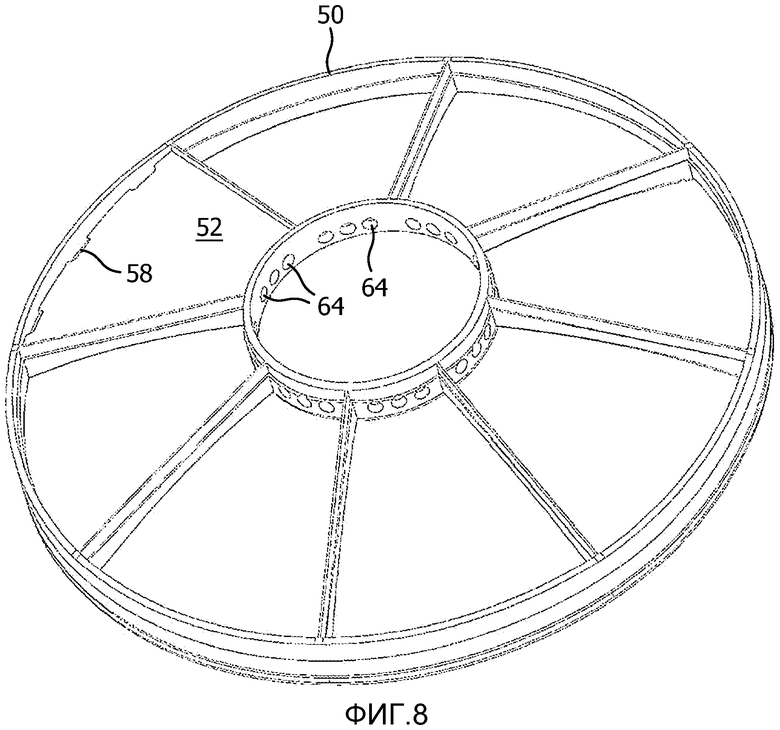
На фиг. 8 проиллюстрирована в перспективе задняя часть HIFU преобразователя по настоящему изобретению с прикрепленным опорным каркасом для плат с печатной схемой на фиг. 7a и 7b.
На фиг. 9 и 10 проиллюстрирован модульный датчик кавитации, установленный в HIFU преобразователе в соответствии с принципами настоящего изобретения.
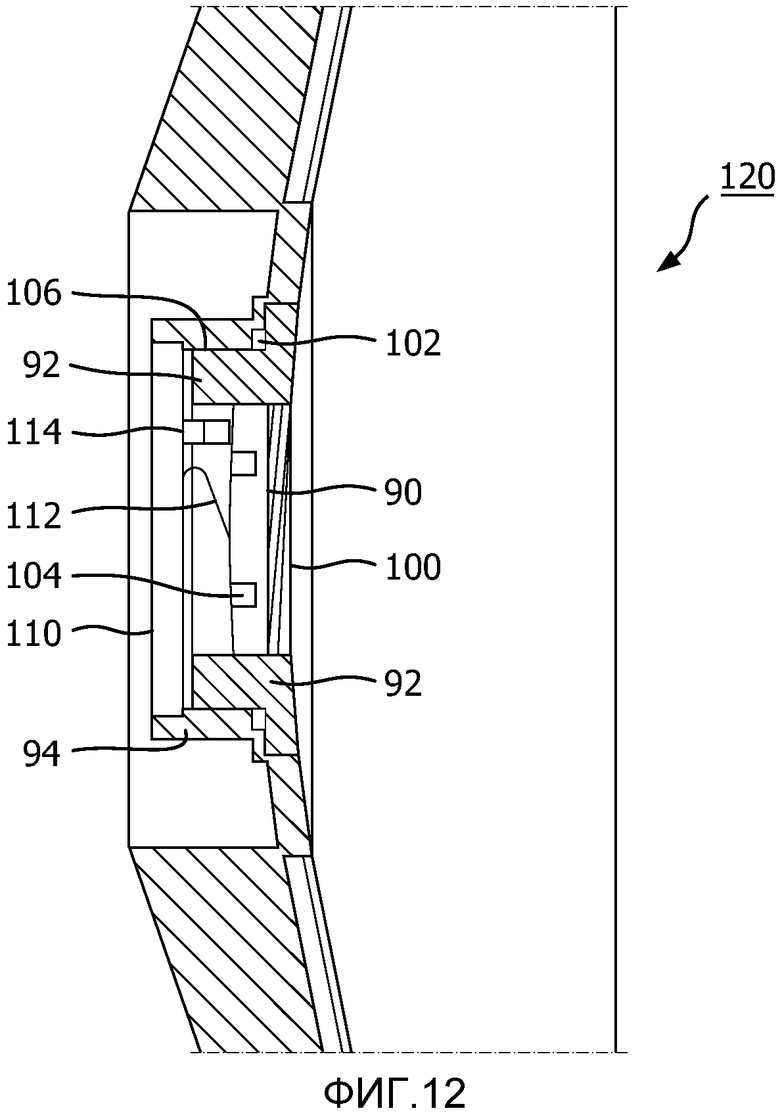
На фиг. 11 и 12 представлены виды в поперечном разрезе HIFU преобразователя с модульным датчиком кавитации.
Конструирование HIFU преобразователя по настоящему изобретению можно начинать с изготовления сферического или чашеобразного согласующего слоя. Согласующий слой(и) преобразователя обеспечивают по меньшей мере частичное согласование акустических свойств пьезоэлектрического преобразователя с акустическими свойствами организма пациента или среды между преобразователем и пациентом. Согласованные свойства могут включать акустический импеданс, скорость звука и плотность материала. При стандартном конструировании ультразвукового преобразователя согласующий слой в целом формируют на стеке преобразователя и формируют поверх опорных электродов на излучающей поверхности пьезоэлектрического материала. Для HIFU преобразователя, описанного в этом раскрытии, сферический согласующий слой формируют сам по себе, отдельно от остального преобразователя. Существует несколько способов для того, чтобы формировать сферический согласующий слой, включая литье, формование, горячее формование, или механическую обработку. Сферический согласующий слой HIFU преобразователя, описанный в настоящем документе, выполняют из нагруженной эпоксидной смолы, которая нагружена частицами, которые обеспечивают желаемые акустические свойства согласующего слоя, как известно в данной области. Предпочтительно частицы являются немагнитными. При литье или формовании сферического согласующего слоя нагруженную эпоксидную смолу выливают в вогнутую оснастку желаемой сферической формы. Сверху вогнутую оснастку закрывают выпуклой оснасткой, заставляя жидкую эпоксидную смолу заполнять сферическое пространство между двумя оснастками. Эпоксидную смолу отверждают и удаляют из оснасток, затем по периферии подвергают механической обработке до ее конечной формы. В способе горячего формования плоский лист желаемой толщины формируют из нагруженной эпоксидной смолы, затем частично отверждают. Затем лист помещают на нагретую выпуклую или вогнутую оснастку желаемой кривизны, которая нагревает лист с тем, чтобы он стал гибким и принял форму кривизны оснастки. Когда лист приобрел свою желаемую сферическую форму, его отверждают и подвергают конечной обработке. В способе механической обработки диск из нагруженной эпоксидной смолы отливают или формуют и отверждают. Затем диск подвергают механической обработке с одной стороны для того, чтобы формировать выпуклую поверхность. Затем диск помещают на вогнутую оснастку и осуществляют механическую обработку другой стороны диска для того, чтобы формировать вогнутую сторону сферического согласующего слоя. В сконструированном варианте осуществления сферический согласующий слой с конечной обработкой после какого-либо из этих способов имеет толщину 0,5 мм, диаметр 140 мм, сферический радиус 140 мм, размер и форму HIFU преобразователя с конечной обработкой. На фиг. 1 проиллюстрирован такой сферический согласующий слой 10. Вогнутая поверхность 12 представляет собой излучающую поверхность преобразователя с конечной обработкой, которая обращена к пациенту, а на выпуклую поверхность 14 наносят напыление для того, чтобы получить электрод с избыточным возвратом сигнала, затем покрывают ее композитными пьезоэлектрическими плитками. Жесткий согласующий слой, таким образом, обеспечивает желаемую форму кривизны для сборки слоя пьезоэлектрических плиток. Поскольку согласующий слой 10 перед плитками представляет собой непрерывно сформированную поверхность, она обеспечивает желаемую электрическую изоляцию и внешнюю изоляцию остального HIFU преобразователя от пациента и внешнего окружения перед HIFU преобразователем.
Конструирование матрицы композитных пьезоэлектрических преобразователей начинают с листа 30 из керамического пьезоэлектрического материала, как показано на фиг. 2a и 2b. В сконструированном преобразователе лист 30 имеет толщину 1,2 мм (T). Сначала просверливают множество отверстий через лист 30, где желательно иметь электрические соединения от задней части к передней части (излучающей стороне) преобразователя. Затем отверстия заполняют содержащей серебро эпоксидной смолой для формирования переходных отверстий 32 через лист. Заполнение серебром обеспечивает электрическую проводимость и является немагнитным для работы в магнитном поле MRI системы. Другой немагнитный проводящий материал можно использовать для проводящего заполнения. Серебряная эпоксидная смола отверждается. Затем на листе нарезают сетку по частям через толщину, используя параллельные разрезы 16 в одном направлении, как показано в виде листа 30 на фиг. 2a. Затем на листе нарезают сетку по частям через параллельные разрезы в ортогональном направлении, оставляя множество выступающих вверх пьезоэлектрических столбиков 18 и переходных отверстий 32. Затем надрезы сетки заполняют непроводящей эпоксидной смолой и частично отверждают. Верхнюю и нижнюю поверхности листа затем подвергают механической обработке до глубин, показанных штриховыми линиями 34 на фиг. 2a. В результате этого получают лист матрицы пьезоэлектрических столбиков 18 с конечной обработкой и проводящие переходные отверстия 32 в эпоксидной смоле 36, как показано на фиг. 2b. Лист с конечной обработкой содержит матрицу пьезоэлектрических столбиков 1:3, каждый из которых имеет свою доминирующую колебательную моду в его продольном направлении через толщину листа и которые передают ультразвук преимущественно в направлении к передней (обращенной к пациенту) стороне преобразователя. Эта преимущественная колебательная мода композитного материала снижает нежелательную латеральную передачу поперек матрицы к другим активным областям матрицы.
Плоский композитный пьезоэлектрический лист 30 подвергают механической обработке до трапецеидальной формы, как показано посредством периферической формы композитной пьезоэлектрической плитки 40 на фиг. 4. В сконструированном HIFU преобразователе плитки имеют трапецеидальную форму с фиг. 4 для того, чтобы допустить круглую плитку сферического центра, как описано ниже. Альтернативно, каждую плитку можно механически обрабатывать до формы дисковой секции, чтобы плитки покрывали согласующий слой, не требуя центральной плитки. Плитки также могут принимать другие геометрические формы, расположенные, чтобы покрывать сферическую поверхность, включая в качестве неограничивающих примеров пятиугольники вперемешку с шестиугольниками, как продемонстрировано с помощью секций футбольного мяча. Затем плоской трапецеидальной плитке по фиг. 4 придают желательную сферическую кривизну. Поскольку композитный преобразователь формируют из матрицы в эпоксидной смоле, плитку можно нагревать, чтобы размягчать эпоксидную смолу, чтобы плитка могла принять желаемую кривизну. Это можно осуществлять посредством размещения плитки 40 на нагретой вогнутой или выпуклой оснастке, затем прижимая плитку в соответствии с выпуклой или вогнутой формой. Сохраняя желательную кривизну плитки, оснастку охлаждают и позволяют эпоксидной смоле полностью затвердеть. Результатом является композитная пьезоэлектрическая плитка сферической формы для сферического HIFU преобразователя.
После затвердевания плитки верхнюю и нижнюю поверхности 38 металлизируют посредством распыления проводящего материала на поверхности листа, как показано для листа 30 на фиг. 3. Предпочтительно проводящий материал является немагнитным, таким как золото или титан/золото. Металлизированные поверхности электрически соединены посредством проводящих переходных отверстий 32, что обеспечивает электрическое соединение между задней и передней поверхностями композитного листа. Активные (передающие и принимающие) области композитного пьезоэлектрического листа затем изолируют посредством колонкового алмазного сверления, лазерного сверления или ультразвуковой механической обработки около желаемых активных областей с задней (выпуклой) поверхности плитки. Несколько таким образом определенных активных областей 44 представлены на фиг. 3 и 4. Разрезы 42, которые определяют активные области, прорезают через металлизацию поверхности листа, чтобы электрически изолировать области, и предпочтительно проходят более чем наполовину через композитный лист с тем, чтобы акустически изолировать активную область от окружающих областей листа и других активных областей. Альтернативно, активные области можно электрически и акустически изолировать после соединения плиток с согласующим слоем.
В сконструированной плитке активные области 44 расположены не симметрично рядами, или столбцами, или кругами, или по другим регулярным структурам, а расположены нерегулярно или случайно, как показано на фиг. 4. Случайная структура предотвращает какое-либо значимое аддитивное комбинирование акустических боковых лепестков активных областей, которое будет уменьшать эффективную энергию, доставляемую посредством HIFU преобразователя.
Затем восемь сферических трапецеидальных плиток 40 редко соединяют смежно друг с другом около выпуклой поверхности 14 согласующего слоя 10, который тем самым предоставляет форму для сборки плиток. Если сферические плитки 40 имеют форму пирога, как описано выше, плитки будут полностью покрывать выпуклую сторону согласующего слоя 10. Когда сферические плитки являются трапецеидальными, как показано на фиг. 4, они покрывают выпуклую сторону согласующего слоя, за исключением центра согласующего слоя. Это круглое сферическое пространство можно оставлять открытым. Альтернативно его можно покрывать круглым сферическим проводником тепла, таким как алюминий, для охлаждения. Возвращающаяся акустическая энергия будет стремиться фокусироваться в центре HIFU преобразователя за счет его сферической геометрической формы. Расположение здесь проводника тепла может помогать охлаждать HIFU преобразователь. Альтернативно, круглая сферическая композитная пьезоэлектрическая плитка 48 может заполнять это пространство. Например, можно формировать круглый лист сферической формы по фиг. 3, со своими собственными активными областями, и располагать здесь, обеспечивая полное композитное пьезоэлектрическое покрытие согласующего слоя 10, как показано на виде в поперечном разрезе трапецеидальной и круглой плиток на согласующем слое 10 на фиг. 5. В сконструированном преобразователе этой конструкции с полным покрытием девять плиток предоставляют HIFU преобразователь с 265 активными областями, 256 для передачи и 9 для приема.
На фиг. 3 видно, что переходные отверстия 32 расположены с тем, чтобы соединять металлизированную область около активных областей на верхней поверхности с металлизированной поверхностью на передней (обращенной к пациенту) стороне плитки. В сконструированном HIFU преобразователе металлизированную область около активных областей 44 электрически соединяют с опорным потенциалом. Переходные отверстия 32 соединяют этот опорный потенциал с металлизированной поверхностью на другой стороне плитки, эта сторона не видна на фиг. 3. Переходные отверстия, таким образом, используют для того, чтобы подавать опорный потенциал на обращенную к пациенту сторону композитных пьезоэлектрических плиток, и также на металлизацию на обращенной к пациенту стороне активных областей 44. Поскольку обращенная к пациенту сторона плиток 40 соединена с согласующим слоем 10 и, таким образом, недоступна для электрических соединений, переходные отверстия обеспечивают необходимое электрическое соединение через пьезоэлектрический лист с передней стороной плитки.
Затем пластмассовый опорный каркас 50 прикрепляют к задней части собранных плиток посредством креплений, защелок или застежек, как показано на фиг. 6. В сконструированном преобразователе каждая из девяти плиток 40, 48 доступна между ребрами опорного каркаса. Опорный каркас используют для того, чтобы крепить восемь трапецеидальных и одну круглую платы 52 с печатной схемой на определенном расстоянии от задних поверхностей композитных пьезоэлектрических плиток 40. На фиг. 7a и 7b проиллюстрированы передняя и задняя (54) поверхности трапецеидальных плат 52 с печатной схемой. На задней поверхности 54 расположены соединения 56 печатной схемы от соединителя 57, которые соединены посредством металлизированных сквозных отверстий 59 через плату с активными областями HIFU преобразователя. На передней поверхности плат с печатной схемой расположены соответствующие металлические контакты 60, которые заполняют пространство между платой с печатной схемой и ее плиткой и электрически соединяют соединения печатной схемы с активными областями 44 и переходными отверстиями 32 расположенной напротив композитной пьезоэлектрической плитки 40. На одном крае платы 52 с печатной схемой, который расположен на периферии HIFU преобразователя, расположены охлаждающие вырезы 58.
Плату 52 с печатной схемой соединяют с опорным каркасом 50 над каждой плиткой, такой как плитка 40, представленная на фиг. 6. Когда плату с печатной схемой собирают таким образом, она выглядит, как показано посредством платы 52 с печатной схемой на фиг. 8. Перед этой сборкой выступающие концы соответствующих металлических контактов 60 покрывают проводящей эпоксидной смолой. Когда плату с печатной схемой собирают на каркасе, концы контактов 60 контактируют с металлизированными областями расположенной напротив плитки и электрически соединяются с металлизированными областями, когда проводящая эпоксидная смола затвердевает. Контакты 60, таким образом, обеспечивают электрическую связь между платами с печатной схемой и активными областями и областями и опорного потенциала пьезоэлектрических плиток.
Хотя платы с печатной схемой можно изготавливать в виде стандартных плоских плат с печатной схемой, плата 52 с печатной схемой на фиг. 7a и 7b предпочтительно имеет сферическую кривизну, совпадающую с таковой расположенных напротив композитных пьезоэлектрических плиток 40, с которыми они соединены посредством контактов 60. Платы с печатной схемой могут быть изогнуты только со стороны, обращенной к плитке, как показано на фиг. 7a, или с обеих сторон. Платы с печатной схемой можно формировать в виде изогнутых плат несколькими путями. Один способ начинается с механической обработки или стачивания поверхности толстого плоского листа материала эпоксидного стеклопластика для плат до желаемой кривизны. Другой способ состоит в использовании горячего формования для нагревания материала платы и размягчения эпоксидной смолы с последующим формированием кривизны посредством прижимания листа к оснастке желаемой кривизны. Схемные платы могут быть покрыты двойной оболочкой с фотолитографическими и химически вытравленными проводящими линиями на верхней и нижней поверхностях, соединенных посредством металлизированных сквозных отверстий, сформированных в платах. Схемные платы также могут представлять собой многослойные платы с тремя или более слоями проводящих линий, сформированных на поверхности и внутри слоев платы для более сложных конфигураций схем более высокой плотности. Жесткие платы 52 также допускают надежное крепление других электрических компонентов, таких как соединитель 57.
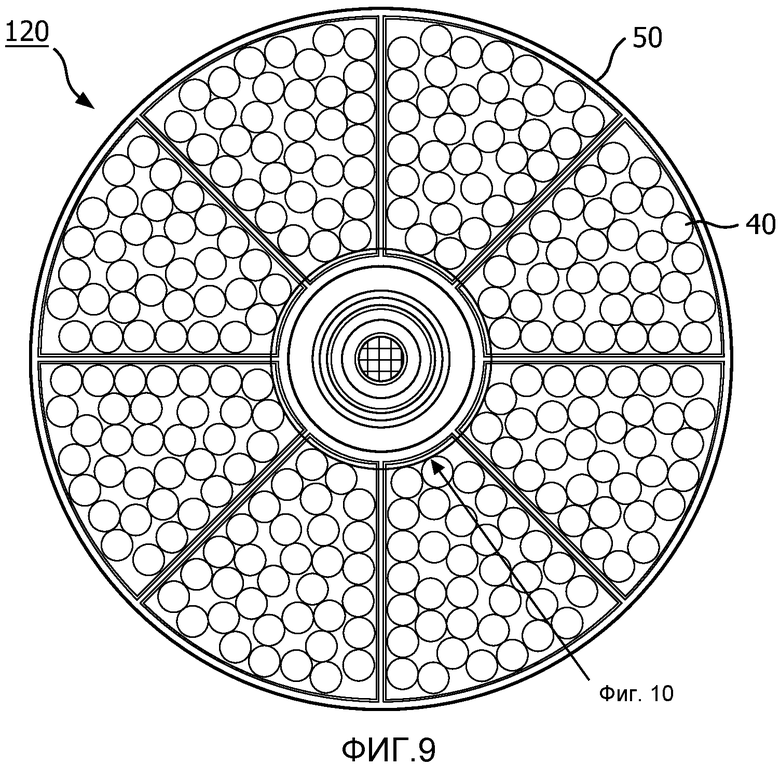
В соответствии с принципами настоящего изобретения, модульный съемный датчик кавитации расположен в центре HIFU преобразователя, как проиллюстрировано в виде преобразователя сзади, представленном на фиг. 9. В этом виде платы 52 с печатной схемой удалены и видны задние части плиток 40 в каркасе 50. Круглую плату с печатной схемой в центре каркаса 50 для выполнения соединений с датчиком кавитации также удаляют с тем, чтобы была видна модульная сборка для датчика кавитации. Область с перекрестной штриховкой в центре HIFU преобразователя представляет собой местоположение датчика 90 кавитации. Увеличенный вид центра HIFU преобразователя представлен на фиг. 10.
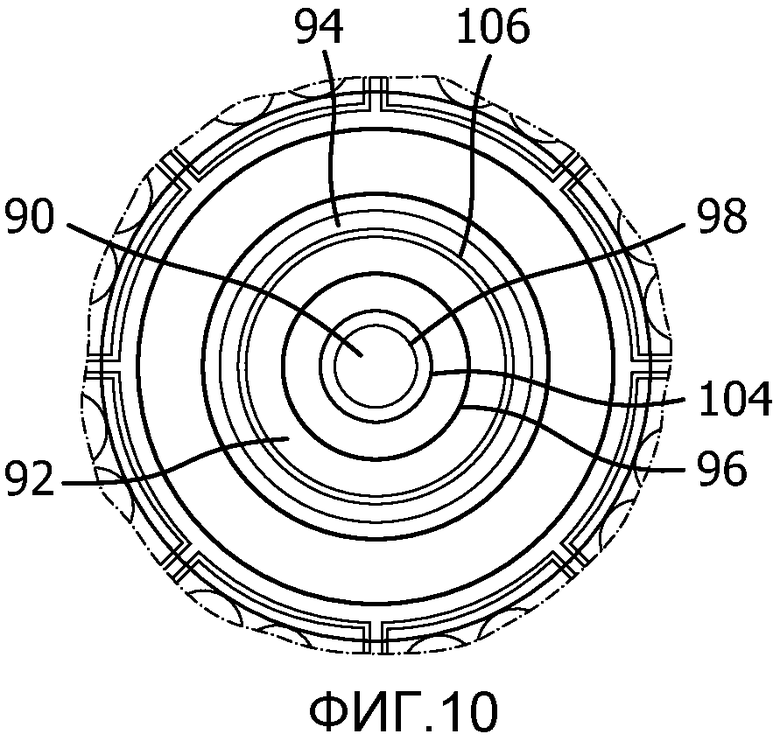
В увеличенном виде на фиг. 10 в центре HIFU преобразователя расположено отверстие, которое окружено выдающимся назад креплением 94 цилиндрической платы с печатной схемой. Крепление 94 выступает назад от кольца центрального отверстия и ввинчивается в его внутреннюю цилиндрическую поверхность. Резьбовой модульный корпус 92 расположен внутри резьбового крепления платы с печатной схемой вперед от местоположения платы с печатной схемой. Зацепление двух резьбовых поверхностей показано как 106. Датчик 90 кавитации, пьезоэлектрический принимающий элемент, расположен в корпусе 92. Пьезоэлектрический принимающий элемент можно формировать из твердой пьезоэлектрической керамики, композитной керамики, сформированной посредством нарезания сетки на пьезоэлектрический керамический диск под правильными углами и заполнения сетчатых разрезов эпоксидным наполнителем, или элемента, выполненного из пьезоэлектрического PVDF материала. В любом случае, пьезоэлектрический элемент стачивают или стирают до толщины, которая достигает желаемой принимаемой частоты. Внешние поверхности пьезоэлектрического элемента металлизируют для того, чтобы предоставить сигнальные и возвратные контакты. Круглый изоляционный разрез 104 формируют в задней поверхности пьезоэлектрического элемента для того, чтобы разделить металлизацию на задней поверхности на два контактных электрода, круглый контактный электрод 98 в центре задней поверхности и кольцевой периферический контактный электрод 96, который непрерывно соединен с металлизацией на передней части элемента. Затем к элементу прикрепляют электрические полюса. Согласующий слой 100 соединяют с передней поверхностью пьезоэлектрического элемента 90.
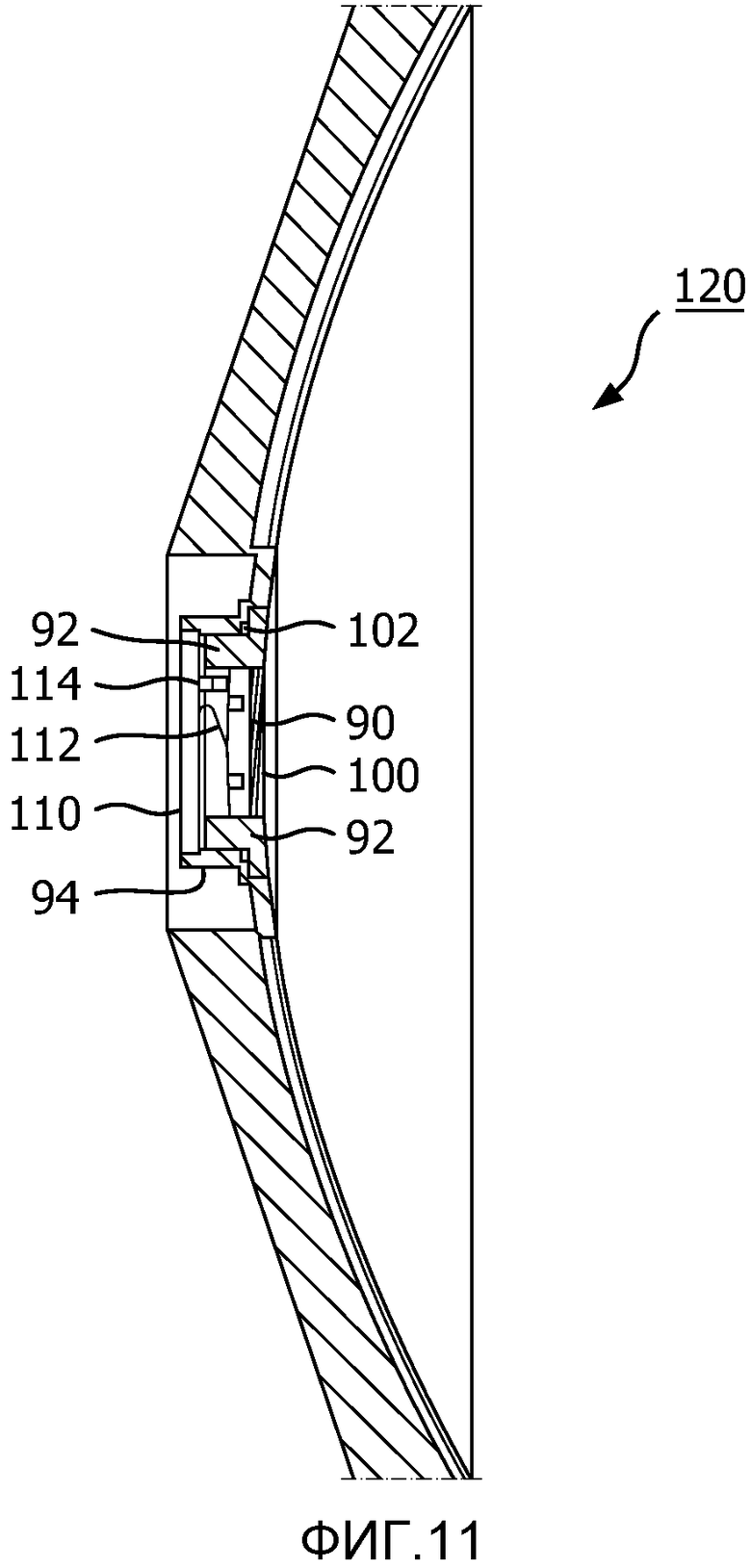
На фиг. 11 и 12 представлены виды в поперечном разрезе модульно смонтированного датчика кавитации, установленного в HIFU преобразователе 120, причем на фиг. 12 представлен центральный сборочный узел в увеличенном виде. Виден корпус 92 модульного датчика кавитации с его центрально соединенным пьезоэлектрическим чувствительным элементом 90, который обращен к согласующему слою 100. Уплотнительное кольцо 102 помещают вокруг модульного корпуса 92 перед ввинчиванием резьбовой наружной части корпуса в совпадающую резьбу крепления 94 платы с печатной схемой. Когда модульный корпус 92 полностью ввинчен на место, уплотнительное кольцо 102 зажато между модульным корпусом 92 и креплением 94 для того, чтобы формировать непроницаемое для жидкости уплотнение вокруг корпуса. Когда корпус 92 уплотнен таким образом, электрические контакты 112, 114, идущие от платы с печатной схемой 110, образуют электрический контакт с металлизированными контактными электродами 98, 96 пьезоэлектрического элемента. Эти контакты передают пьезоэлектрические сигналы, получаемые элементом 90, на схему на плате с печатной схемой 110, с которой принимаемые сигналы, которые могут указывать на кавитацию, передают на электрическую схему и обрабатывают.
Если датчик кавитации поврежден во время изготовления или во время использования, поврежденный датчик кавитации можно заменять посредством вывинчивания модульного корпуса 92 и чувствительного элемента 90 из преобразователя 120. В сконструированном варианте осуществления множество отверстий формируют в обращенной к пациенту стороне модульного корпуса 98 для зацепления рычажного ключа для ввинчивания и вывинчивания корпуса из крепления 94 преобразователя. После вывинчивания и удаления чувствительного элемента новый модульный корпус и чувствительный элемент ввинчивают обратно в отверстие до тех пор, пока уплотнительное кольцо 102 не будет снова зажато для того, чтобы формировать гидравлическое уплотнение. Упругие пружинные контакты 112, 114 платы с печатной схемой 110 образуют контакт с электродами 98, 96 нового датчика и тогда HIFU преобразователь с его новым датчиком готов для введения обратно в эксплуатацию.
Использование: для управляемого нагревания тканей организма посредством фокусированного ультразвука высокой интенсивности. Сущность изобретения заключается в том, что ультразвуковой HIFU преобразователь имеет резьбовое отверстие, в котором съемно расположен модульный датчик кавитации. Модульный датчик кавитации содержит модульный корпус, содержащий пьезоэлектрический преобразователь для восприятия акустических сигналов, указывающих на кавитацию. Модульный датчик кавитации имеет электроды, которые взаимодействуют с пружинными контактами в резьбовом отверстии, когда модульный корпус ввинчивается в резьбовое отверстие. Технический результат: обеспечение возможности вывинчивать и просто заменять без соединителей или пайки поврежденный датчик. 14 з.п. ф-лы, 12 ил.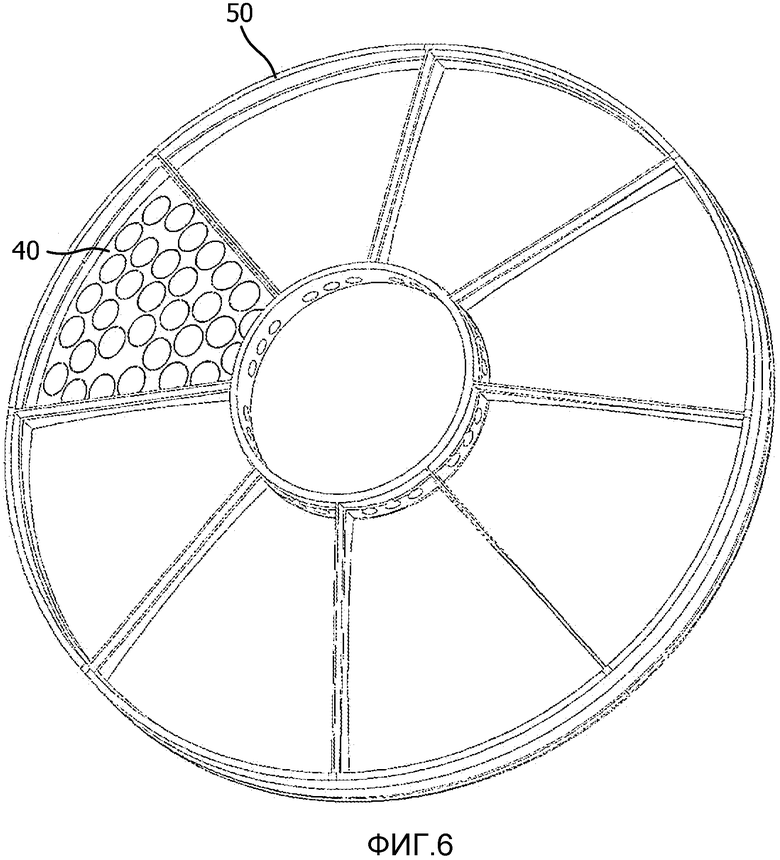
1. Сфокусированный ультразвуковой преобразователь высокой интенсивности (HIFU преобразователь), имеющий заменяемый датчик кавитации, содержащий:
чашеобразный HIFU передатчик, имеющий центральную область;
датчик кавитации; и
модульный корпус, который содержит датчик кавитации, причем модульный корпус съемно расположен в HIFU передатчике так, что датчик кавитации позиционирован для приема акустических сигналов, которые могут указывать на кавитацию.
2. HIFU преобразователь по п. 1, в котором чашеобразный HIFU передатчик имеет сферическую обращенную к пациенту поверхность.
3. HIFU преобразователь по п. 1, в котором датчик кавитации дополнительно содержит пьезоэлектрический преобразователь.
4. HIFU преобразователь по п. 3, в котором пьезоэлектрический преобразователь дополнительно содержит пьезоэлектрический элемент, сформированный в виде одного из: a) твердой пьезоэлектрической керамики; b) композитной керамики, сформированной посредством нарезания сетки на пьезоэлектрическом керамическом диске и заполнения разрезов сетки материалом наполнителя; или c) элемента, выполненного из пьезоэлектрического PVDF материала.
5. HIFU преобразователь по п. 4, в котором пьезоэлектрический преобразователь имеет внешние поверхности, которые металлизированы для обеспечения первого и второго электродов.
6. HIFU преобразователь по п. 5, в котором пьезоэлектрический преобразователь дополнительно содержит изоляционный разрез, который электрически разделяет металлизированную внешнюю поверхность на отдельные электроды.
7. HIFU преобразователь по п. 1, в котором модульный корпус съемно расположен в центральной области HIFU передатчика.
8. HIFU преобразователь по п. 7, в котором центральная область дополнительно содержит резьбовое отверстие; и
причем модульный корпус имеет резьбу для разъемного зацепления с резьбовым отверстием центральной области.
9. HIFU преобразователь по п. 8, который дополнительно содержит плату с печатной схемой, расположенную в центральной области, причем плата с печатной схемой имеет электрические контакты;
при этом датчик кавитации дополнительно содержит электроды, которые взаимодействуют с электрическими контактами платы с печатной схемой, когда модульный корпус ввинчен в центральную область.
10. HIFU преобразователь по п. 8, в котором модульный корпус дополнительно сформирован для взаимодействия с инструментом для ввинчивания модульного корпуса в центральную область.
11. HIFU преобразователь по п. 10, в котором модульный корпус дополнительно сформирован с множеством отверстий, подходящих для взаимодействия с гаечным ключом.
12. HIFU преобразователь по п. 8, который дополнительно содержит непроницаемое для жидкости уплотнение, входящее в зацепление между модульным корпусом и HIFU передатчиком, когда модульный корпус полностью вставлен в HIFU передатчик.
13. HIFU преобразователь по п. 12, в котором непроницаемое для жидкости уплотнение дополнительно содержит уплотнение с уплотнительным кольцом.
14. HIFU преобразователь по п. 9, в котором электрические контакты плат с печатной схемой дополнительно содержат упругие контакты.
15. HIFU преобразователь по п. 14, в котором упругие контакты дополнительно содержат пружинные контакты.
| US 2009287083A1, 19.11.2009 | |||
| СИСТЕМА ФОКУСИРОВАННОГО ВОЗДЕЙСТВИЯ УЛЬТРАЗВУКОМ ВЫСОКОЙ ИНТЕНСИВНОСТИ ДЛЯ СКАНИРОВАНИЯ И ЛЕЧЕНИЯ ОПУХОЛЕЙ | 1998 |
|
RU2210409C2 |
| Диспергатор-смеситель | 1989 |
|
SU1694397A1 |
| Ультразвуковое фокусирующее устройство | 1990 |
|
SU1763973A1 |
| US 20050245824A1, 03.11.2005 | |||
| US 7258674B2, 21.08.2007. | |||

