ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к способу передачи данных трехмерного (3D) изображения, способ содержит этапы, на которых, в устройстве-источнике 3D, обрабатывают исходные данные изображения, чтобы формировать сигнал 3D-отображения, причем сигнал 3D-отображения содержит кадры изображения, и вывод сигнала 3D-отображения; и в целевом устройстве 3D, извлекают данные 3D-изображения и обеспечивают вывод на основе сигнала 3D-отображения.
Изобретение дополнительно относится к вышеупомянутому устройству-источнику 3D, сигналу 3D-отображения и целевому устройству 3D.
Изобретение относится к области передачи данных трехмерного (3D) изображения, в сжатой форме, такой как, например, расширение для DVB, направляемого в 3D, или несжатой форме через высокоскоростной цифровой интерфейс, например, HDMI.
УРОВЕНЬ ТЕХНИКИ
Известны различные схемы отображения трехмерных изображений (статических или движущихся изображений). Одна хорошо известная схема одновременно отображает два изображения, которые закодированы для левого глаза и правого глаза посредством различных оптических поляризаций или цветов (например, красного и зеленого). Зритель носит пару специальных очков, которые имеют линзы перед левым и правым глазами. Линзы выполнены с возможностью пропускания только изображения, предназначенного для этого глаза, т.е. левый глаз, видит только изображение, предназначенное для этого глаза. Другой способ стереоскопического отображения последовательно представляет изображение, предназначенное для левого глаза, и изображение, предназначенное для правого глаза. Пользователь носит специальную пару очков, которые закрываются синхронно с отображаемыми изображениями, так что затвор левого глаза открыт в течение периода, когда отображается изображение для левого глаза, а затвор правого глаза открыт в течение периода, когда отображается изображение для правого глаза.
Способы автоматического стереоскопического отображения устраняют необходимость для зрителя носить специальные очки. Одна известная схема использует дисплей с плоской панелью с многогранными наклоненными ступенчатыми линзами, установленными перед элементами отображения. Пример этого вида дисплея описан в WO 07/069195 A2.
Известны устройства для снабжения 2D-видеоданными, например, видеопроигрыватели типа DVD-проигрывателей или телевизионные приставки, которые предоставляют цифровые видеосигналы. Устройство-источник должно быть соединено с устройством отображения типа телевизора или монитора. Данные изображения передаются из устройства-источника через подходящий интерфейс, предпочтительно высокоскоростной цифровой интерфейс типа HDMI. В настоящее время на рынке появляются усовершенствованные 3D-устройства, такие как 3D Blu-ray-проигрыватели. Для передачи 3D-видеосигналов от устройства-источника устройству отображения разрабатываются новые стандарты цифровых интерфейсов высокоскоростной передачи данных, например, основанные на и совместимые с существующим стандартом HDMI. Передача сигналов двумерного цифрового изображения устройству отображения обычно подразумевает передачу пиксельных данных видеоизображения кадр за кадром, причем эти кадры должны отображаться последовательно. Такие кадры могут либо представлять видеокадры прогрессивного видеосигнала (полные кадры), либо могут представлять видеокадры чересстрочного видеосигнала (на основе хорошо известного чередования строк, один кадр представляет нечетные строки, а следующий кадр представляет четные строки, которые должны отображаться последовательно).
Аналогично, распространение 2D-контента конечным пользователям известно из DVB. С выпуском на рынок 3D Blu-ray устройств стал доступным стереоскопический контент, и существует необходимость в том, чтобы также предоставлять возможность распространения этого контента другими средствами, например, через кабель или спутник. Для того чтобы приспосабливать отрасль, расширяется DVB-инфраструктура, чтобы предоставлять возможность распространения 3D-контента через DVB.
WO 2008/115222 описывает систему для объединения текста с 3D-видеоконтентом. Для вставки текста в режиме онлайн местоположение субтитров не известно заранее. Актуальная карта глубин обрабатывается, чтобы определять максимальное значение глубины, которое используется, чтобы позиционировать текст спереди видео. Процесс может повторяться, так что новые максимальные значения глубины определяются, когда доступна достаточная вычислительная мощность.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение стремится предоставить альтернативный способ доставки данных трехмерного изображения (3D), способом, к которому не обращался предшествующий уровень техники.
Формула изобретения определяет варианты осуществления настоящего изобретения. Согласно изобретению предусмотрено устройство-источник 3D для вывода сигнала трехмерного изображения, причем сигнал трехмерного изображения содержит данные многоракурсного изображения, а устройство-источник 3D содержит:
вход для приема данных изображения;
формирователь, выполненный с возможностью формирования сигнала трехмерного изображения на основе данных изображения, сигнал трехмерного изображения содержит:
первый компонент, содержащий множество 2D-изображений для использования в стереоскопическом визуальном отображении;
второй компонент, содержащий данные наложения;
третий компонент, определяющий информацию, сигнализирующую о диспаратности, для использования в наложении данных изображения поверх соответствующих данных множества 2D-изображений, причем третий компонент содержит параметр, определяющий информацию о диспаратности, имеющую изменяющийся во времени профиль диспаратности, для предоставления прогнозирующего параметра для указания того, как диспаратность наложения предполагает изменяться во времени; и
дополнительный третий компонент, в более позднее время в сигнале трехмерного изображения, чем третий компонент, определяющий новую информацию, сигнализирующую о диспаратности, для использования в наложении данных изображения поверх соответствующих данных множества 2D-изображений, дополнительный третий компонент содержит дополнительный параметр, определяющий новую информацию о диспаратности, имеющую новый, изменяющийся во времени профиль диспаратности, для предоставления дополнительного прогнозирующего параметра для указания того, как диспаратность наложения предполагает изменяться во времени,
причем новая информация, сигнализирующая о диспаратности, в дополнительном третьем компоненте аннулирует информацию, сигнализирующую о диспаратности, в третьем компоненте.
Также, согласно изобретению предусмотрено целевое устройство 3D для приема сигнала трехмерного изображения, причем сигнал трехмерного изображения содержит данные многоракурсного изображения, а целевое устройство 3D содержит:
- приемник для приема сигнала трехмерного изображения;
- демультиплексор для демультиплексирования сигнала трехмерного изображения, по меньшей мере, в:
первый компонент, содержащий множество 2D-изображений для использования в стереоскопическом визуальном отображении;
второй компонент, содержащий данные наложения;
третий компонент, определяющий информацию, сигнализирующую о диспаратности, для использования в наложении данных изображения поверх соответствующих данных множества 2D-изображений, причем третий компонент содержит параметр, определяющий информацию о диспаратности, имеющую изменяющийся во времени профиль диспаратности, для предоставления прогнозирующего параметра для указания того, как диспаратность наложения предполагает изменяться во времени; и
дополнительный третий компонент, в более позднее время в сигнале трехмерного изображения, чем третий компонент, определяющий новую информацию, сигнализирующую о диспаратности, для использования в наложении данных изображения поверх соответствующих данных множества 2D-изображений, дополнительный третий компонент содержит дополнительный параметр, определяющий новую информацию о диспаратности, имеющую новый, изменяющийся во времени профиль диспаратности, для предоставления дополнительного прогнозирующего параметра для указания того, как диспаратность наложения предполагает изменяться во времени,
причем новая информация, сигнализирующая о диспаратности, в дополнительном третьем компоненте аннулирует информацию, сигнализирующую о диспаратности, в третьем компоненте; и
формирователь для формирования соответствующих 2D-изображений для использования в стереоскопическом визуальном отображении, в котором данные наложения наложены, как определено в информации, сигнализирующей о диспаратности.
Отметим, что первый компонент может содержать стереопары.
Изобретатели поняли, что существует значительное различие между контентом, который предварительно создан, таким как для 3D Blu-ray дисков, и контентом, который типично транслируется через DVB; трансляция контента через DVB довольно часто включает в себя контент в реальном времени; такой как новости, спортивные игры или контент, для которого в финансовом плане бесперспективно оправдывать затраты на широкомасштабную авторскую деятельность, как для контента на 3D Blu-ray дисках.
Определенные задачи авторской деятельности, которые нетрудны для 2D-контента в реальном времени, являются более трудными в реализации для 3D-контента в реальном времени. Примером такой задачи авторской деятельности является формирование субтитров для снимаемого в реальном времени видеоматериала. Тогда как в 2D возможно вставлять субтитры "на лету", посредством ручного или с компьютеризированного формирования субтитров, существует осложняющий фактор в том, что задача ввода субтитров в 3D-контент вызывает дополнительные проблемы. В третьем компоненте информация, сигнализирующая о диспаратности, предусматривает прогнозирующий параметр для указания, как диспаратность наложения предполагает изменяться во времени. В дополнительном третьем компоненте дополнительный прогнозирующий параметр для указания того, как диспаратность наложения предполагает изменяться во времени, аннулирует более ранний прогнозирующий параметр.
Для того чтобы уменьшить неудобство для зрителей, субтитры должны быть расположены таким образом, чтобы не компрометировать впечатление глубины, обеспечиваемое данными трехмерного (3D) изображения. Дополнительным осложняющим фактором является тот факт, что после того как целевое устройство 3D приняло данные трехмерного (3D) изображения и сформировало выходные данные для отображения конечному пользователю, устройству, в свою очередь, может также необходимо накладывать дополнительную графику, в форме индикации на экране (OSD) для своего пользовательского интерфейса.
Для того, чтобы устранять эти проблемы, настоящее изобретение предлагает способ формирования сигнала трехмерного изображения, причем сигнал трехмерного изображения содержит первый компонент в форме данных многоракурсного изображения, второй компонент, представляющий данные для наложения на данные многоракурсного изображения, и третий компонент в форме метаданных, передающих информацию о диспаратности, информация, сигнализирующая о диспаратности, предоставляет прогнозирующий параметр для (под)области изображения, указывающий, как диспаратность в этой области предполагает изменяться во времени.
Предпочтительно, прогнозирующий параметр является единственным прогнозирующим параметром. С помощью этого прогнозирующего параметра возможно для целевого устройства 3D правильно накладывать субтитры и/или графическую информацию, правильно смещая соответствующие субтитры и/или графическую информацию соответствующим образом. Специалистам в области техники будет ясно, что смещение графики в такой (под)области предпочтительно простирается на соседние ракурсы; например, в случае стереопар смещение графики предпочтительно распределено одинаково между левым и правым изображением.
С помощью прогнозирующего параметра возможно обеспечивать более плавное изменение диспаратности между различными моментами времени. Более того, когда прогноз оказывается неточным, что может случаться при кодировании снимаемого в реальном времени видеоматериала, возможно передавать корректирующее значение без привнесения больших непроизводительных издержек.
Предпочтительно информация, сигнализирующая о диспаратности, также предоставляет указание текущего значения диспаратности для области изображения с тем, чтобы улучшать простоту доступа к потоку в случайный момент времени.
В одном варианте осуществления информация, сигнализирующая о диспаратности, определяет первое значение диспаратности для первой временной метки представления и коэффициент, указывающий изменение значения диспаратности во времени. Этот коэффициент может быть указан в изменении пикселов или долей пикселов в каждом кадре или альтернативно на основе системного тактового генератора, доступного как в устройстве-источнике 3D, так и в целевом устройстве 3D.
Выборочно, параметром, определяющим изменяющийся во времени профиль диспаратности, является время.
Выборочно, третий компонент содержит информацию, определяющую, по меньшей мере, два значения диспаратности. Также, третий компонент может определять временной интервал для перехода от первого, по меньшей мере, из двух значений диспаратности ко второму, по меньшей мере, из двух значений диспаратности.
В другом варианте осуществления информация, сигнализирующая о диспаратности, определяет первое значение диспаратности для первой временной метки представления и второе значение диспаратности для второй временной метки представления. Эта информация также обеспечивает целевое устройство 3D возможностью определения значения диспаратности для отображения субтитров/графической информации. Использование двух полностью определенных точек обеспечивает признак безопасности в том, что, если сигнализирующий блок утерян либо при передаче, либо в ином случае, излишнее изменение в диспаратности может быть предотвращено.
При дальнейшем уточнении прогнозирующий параметр информации, сигнализирующей о диспаратности, может дополнительно включать в себя профиль диспаратности, выбранный из предварительно определенного набора профилей, таким образом, предоставляя возможность тонкой подстройки сигнализирования о диспаратности. Последнее предоставляет возможность более плавные изменения, которые могут быть реализованы, когда контент проходит через временную задержку перед вставкой субтитров. Выборочно, третий компонент содержит параметр, выбирающий один из предварительно определенных профилей перехода диспаратности. Выборочно, выбранный предварительно определенный профиль перехода диспаратности параметризуется, по меньшей мере, одним параметром, и второй компонент дополнительно содержит параметр для использования в определении изменяющегося во времени профиля диспаратности.
Как будет ясно специалистам в области техники, способ формирования трехмерного сигнала имеет эквивалент в форме способа приема трехмерного сигнала, содержащего метаданные, передающие информацию о диспаратности.
Способ приема сигнала трехмерного изображения содержит этап использования, на котором используют третий компонент в сигнале трехмерного изображения для наложения данных наложения, содержащихся во втором компоненте, на сигнал трехмерного изображения из первого компонента в назначенных областях со значениями диспаратности в соответствии с компонентом, сигнализирующем о диспаратности.
Изобретение дополнительно относится к устройству-источнику 3D, содержащему: приемник для приема данных многоракурсного изображения, формирователь для формирования сигнала трехмерного изображения, содержащего: первый компонент в форме данных многоракурсного изображения, второй компонент, представляющий данные для наложения на данные многоракурсного изображения, и третий компонент в форме метаданных, передающих информацию о диспаратности, информация, сигнализирующая о диспаратности, предусматривает единственный прогнозирующий параметр для (под)области изображения, указывающий то, как диспаратность в этой области предполагает изменяться во времени.
Изобретение дополнительно относится к целевому устройству 3D для приема сигнала трехмерного изображения согласно изобретению, причем устройство содержит приемник для приема сигнала трехмерного сигнала согласно изобретению и формирователь наложения, выполненный с возможностью наложения данных наложения, содержащихся во втором компоненте, поверх соответствующих изображений, содержащихся в первом компоненте, в назначенных областях, как указано в информации, сигнализирующей о диспаратности, со значениями диспаратности в соответствии с компонентом, сигнализирующем о диспаратности.
Изобретение дополнительно относится к сигналу трехмерного изображения согласно изобретению.
Изобретение дополнительно относится к программному обеспечению для реализации способа формирования или приема сигнала трехмерного изображения согласно изобретению.
Изобретение дополнительно относится к компьютерному программному продукту, содержащему инструкции, которые, когда выполняются на компьютере, реализуют способ формирования или приема сигнала трехмерного изображения согласно изобретению.
Хотя вышеупомянутое описано со ссылкой на передачу 3D-видеосигнала через DVB (цифровое видеовещание), будет понятно, что изобретение может также быть применено в контексте других схем вещания, таких как ATSC (Комитет по улучшенным телевизионным системам). Аналогично, хотя упомянутые примеры относятся к DVB, которое включает в себя сжатые видеоданные, заметим, что настоящее изобретение равным образом применимо в контексте физических интерфейсов устройств, таких как HDMI (мультимедийный интерфейс высокой четкости) или DisplayPort.
Принимая во внимание вышеописанное, таким образом, возможно, что настоящее изобретение, прежде всего, используется в интерфейсе от 3D-DVB, в котором устройство-источник 3D в форме передатчика отправляет первый сигнал трехмерного изображения согласно изобретению целевому устройству 3D в форме телевизионной приставки (STB). STB может затем, например, накладывать OSD поверх входящего сигнала и может на основе этого формировать второй сигнал трехмерного изображения в соответствии с изобретением и отправлять его через HDMI-интерфейс, таким образом, STB теперь выступает в качестве устройства-источника 3D, 3D-телевизору.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Варианты осуществления изобретения будут описаны, только путем примера, со ссылкой на сопутствующие чертежи, на которых:
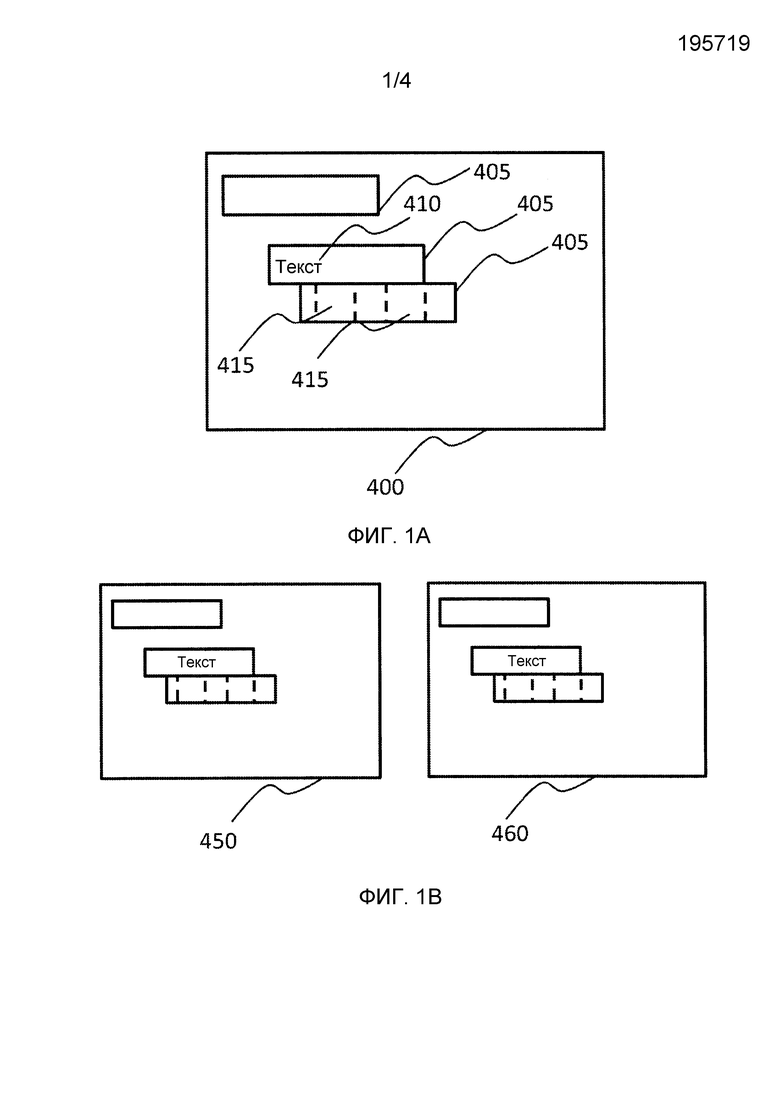
Фиг.1A иллюстрирует некоторые из концепций, используемых повсюду в заявке, когда ссылаются на наложение графики, включая в себя области, подобласти и объекты;
Фиг.1B иллюстрирует то, как настройки диспаратности для области могут быть использованы, чтобы формировать левое и правое изображение, соответственно, стереопары;
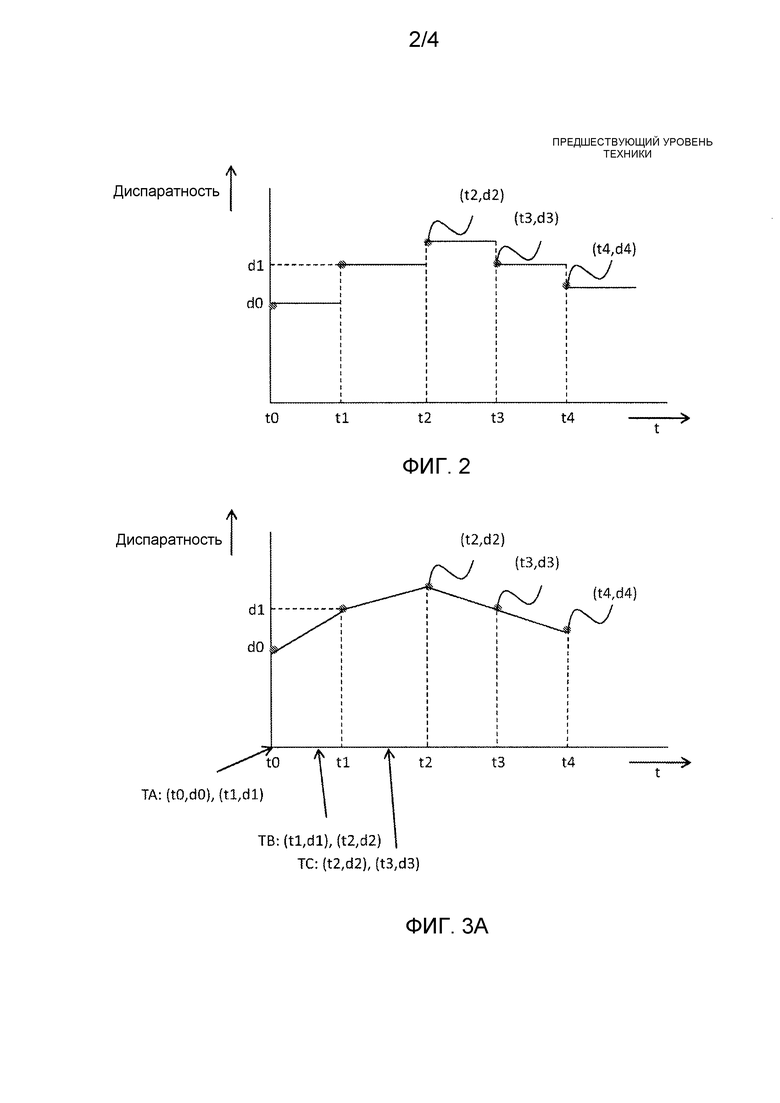
Фиг.2 показывает механизм предшествующего уровня техники для определения диспаратности для наложения;
Фиг.3A показывает, как в варианте осуществления согласно изобретению значения диспаратности для наложения могут быть определены;
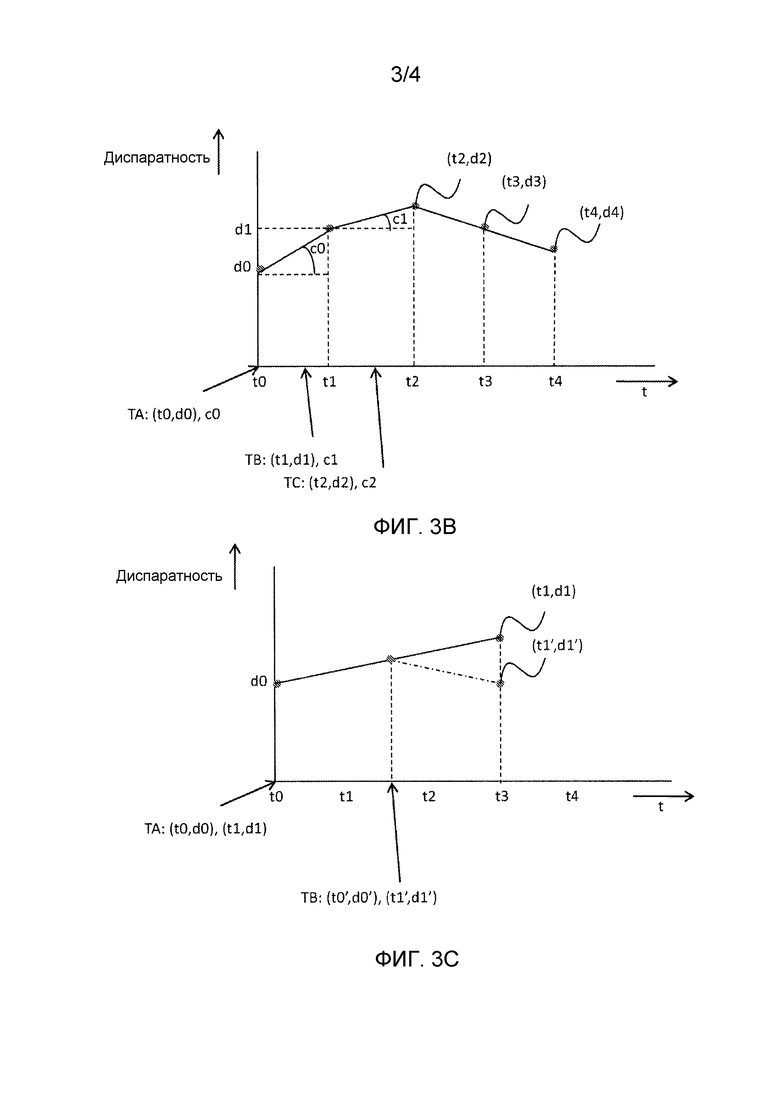
Фиг.3B показывает, как в альтернативном варианте осуществления согласно изобретению значения диспаратности для наложения могут быть определены;
Фиг.3C иллюстрирует преимущество настоящего изобретения над предшествующим уровнем техники;
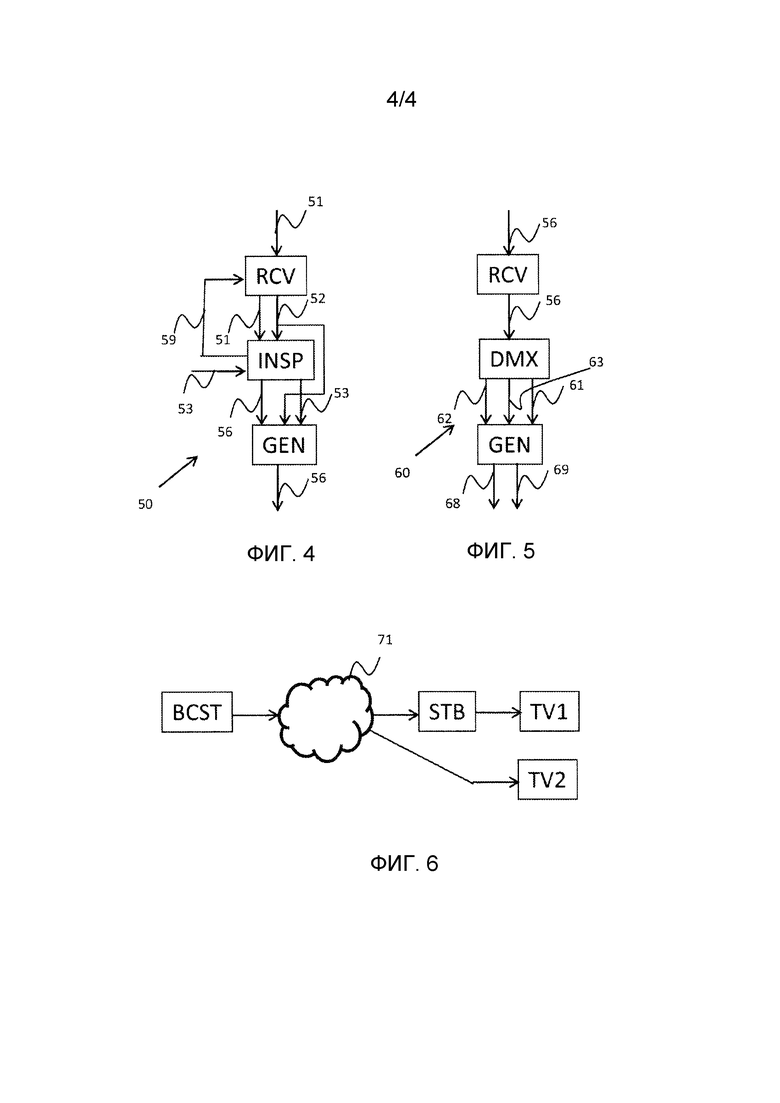
Фиг.4 показывает блок-схему устройства-источника 3D согласно настоящему изобретению;
Фиг.5 показывает блок-схему целевого устройства 3D согласно настоящему изобретению;
Фиг.6 показывает систему, применяющую устройство-источник 3D и устройство-приемник 3D согласно настоящему изобретению.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение предоставляет альтернативный способ доставки данных трехмерного изображения (3D), способом, к которому не обращался предшествующий уровень техники. Настоящее изобретение имеет целью рассмотрение распространения сигналов трехмерного изображения, и оно может быть одинаково использовано как для прямой трансляции, так и для записанного контента.
В отличие от предшествующего уровня техники настоящее изобретение обращается к проблемам, относящимся к вводу субтитров в реальном времени. Изобретатели поняли, что существует значительное различие между контентом, который предварительно создан, таким как 3D Blu-ray диски, и контентом, который типично транслируется через DVB; контент, транслируемый через DVB, довольно часто включает в себя контент в реальном времени; такой как новости, спортивные игры или контент, для которого нет времени, чтобы выполнять широкомасштабную авторскую деятельность.
Фиг.1A иллюстрирует некоторые из концепций, упоминаемых на всем протяжении этой заявки со ссылкой на наложение графики. В контексте настоящего изобретения со ссылкой на информацию, требуемую для создания наложения для многоракурсного изображения, эта информация будет указана как определение страницы. Здесь определение страницы будет описано с помощью эталонного изображения 400, которое соответствует области отображения устройства отображения, например, для последовательного во времени стерео отображения эта область отражает матрицу пикселов устройства отображения.
Определение страницы включает в себя, например, определения областей, эти определения областей определяют области 405 в эталонном изображении 400, здесь прямоугольные области, где графика может быть наложена. Кроме того, этот пример определения страницы также включает в себя определения объектов, которые определяют объекты 410, которые могут быть наложены в областях 410.
Хотя примерный объект 410 показывает слово "Text", отметим, что такое определение объектов может быть одним из многих объектов. Например, объект может быть определен как любая одна комбинация из перечисленных ниже:
- текстовая строка
- текстовая строка и выбор шрифта, необязательно с дополнительными атрибутами, определяющими, например, стиль начертания шрифта, размер, курсив, жирный шрифт, которые известны из традиционных 2D-начертаний шрифта. Могут быть предусмотрены дополнительные признаки, которые обеспечивают текстовую строку атрибутами глубины, такими как, например, значение глубины шрифта, и/или посредством выбора рельефного стиля шрифта,
- растровая графика, необязательно также имеющая некоторую глубину, и
- анимированная растровая графика, опять же необязательно также имеющая некоторую глубину.
Пример дополнительно показывает определение двух так называемых подобластей 415, расположенных в одной области 405 и разграниченных пунктирными линиями.
Для того, чтобы правильно накладывать объект 410 в области 405, требуется дополнительное определение, определение, сигнализирующее о диспаратности, определение, сигнализирующее о диспаратности, может быть предоставлено в потоке в форме сегмента, сигнализирующего о диспаратности.
В своей простейшей форме сегмент, сигнализирующий о диспаратности, предусмотренный настоящим изобретением, определяет значение диспаратности на уровне страницы. В результате, например, в случае стерео отображения вся информация, предоставленная в областях наложения, будет смещена на одинаковое расстояние при формировании левого и правого изображений.
Преимуществом использования схемы на уровне страницы является то, что устройства, имеющие функциональность наложения, могут сохраняться относительно простыми.
В более усовершенствованной схеме определение, сигнализирующее о диспаратности, предоставляет значение диспаратности для областей и/или подобластей. Таким образом, более усовершенствованные наложения могут быть реализованы. Рассмотрим, например, ситуацию, в которой субтитры должны предоставляться для диалога, в котором два человека, ведущие диалог, находятся в различных положениях, один слева рядом с камерой, другой справа дальше от камеры. Более усовершенствованная схема сигнализирования о диспаратности может также допускать эту более сложную схему ввода субтитров.
Когда накладывается графика, имеющая некоторую глубину, смещение соответствующих частей графики должно быть адаптировано на основе ее глубины, однако это будет ясно специалистам в области техники.
Фиг.1B показывает, как сигнализирование о диспаратности в сигнале 3D-изображения может быть использовано, чтобы формировать в этом случае левое изображение (450) и правое изображение (460). Левое изображение 450 и правое изображение 460 основаны на определении страницы, как иллюстрировано на фиг.1A. В этом примере только область 405, содержащая объект 410, показывает ненулевое значение диспаратности. Следовательно, при формировании левого изображения 450, в этом примере, объект 410 смещается влево, как определено значением диспаратности, разделенным на 2, и объект 410 смещается вправо при формировании правого изображения 450 на значение диспаратности, разделенное на 2.
Специалисту в области техники будет ясно, что выбор кодирования значения диспаратности как суммы смещения для левого изображения и для правого изображения является произвольным и может быть легко заменен другим кодированием.
Хотя может показаться несложным предоставление определения страницы для наложения графики, фактический процесс формирования определения страницы осложняется тем фактом, что, например, субтитры или наложения могут не быть синхронными с информацией, предоставленной в лежащем в основе отснятом видеоматериале, на который осуществляется наложение.
Например, рассмотрим ситуацию, в которой отдельный человек интервьюируется при событии в прямом эфире. В определенный момент, берущий интервью заканчивает интервью и говорит последнее предложение своего диалога. В этот момент режиссер выполняет переход на другую камеру. Однако для того, чтобы зритель прочитал субтитры, субтитры должны быть на новую сцену монтажа.
Для того, чтобы урегулировать эту проблему, схема предшествующего уровня предлагает наличие изменяющегося во времени позиционирования наложений. Фиг.2 иллюстрирует процесс предшествующего уровня техники. Рассмотрим, например, ситуацию, в которой сигнализирование о диспаратности происходит на уровне страницы. Определение страницы определяет, что в момент t0 времени используемое значение диспаратности должно быть d0, в момент t1 времени используемое значение диспаратности должно быть d1, в момент t2 времени используемое значение диспаратности - d2, и т.д. Для того, чтобы разрешать целевому устройству 3D правильно использовать информацию о диспаратности, информация должна отправляться в данных трехмерного изображения некоторое время перед тем, как она должна быть использована, так что в момент, когда она должна быть использована, пара (t0, d0) должна быть принята целевым устройством 3D до временной метки представления, соответствующей t1. Другими словами, полное определение страницы для этой временной метки представления должно быть завершено до временной метки представления.
Изобретатели настоящего изобретения поняли, что, хотя этот конкретный подход делает возможной адаптацию, например, диспаратности субтитров к изменениям сцены, изменения в значениях диспаратности будут скорее необработанными, что наблюдается как ступенчатые изменения в диспаратности.
Для того, чтобы устранять эту проблему, изобретатели придумали альтернативный подход, в котором информация, сигнализирующая о диспаратности, содержит прогнозирующий параметр для (под)области изображения, указывающий, как диспаратность в этой области предполагает изменяться во времени.
Пример этой схемы предоставлен на фиг.3A. Рассмотрим опять ситуацию, в которой управление диспаратностью происходит на уровне страницы. В определенный момент времени TA предоставляется первое указание t0 времени и ассоциированное значение d0 диспаратности. Первое указание времени относится ко времени в ближайшем будущем, близком к текущему моменту времени. Кроме того, предоставляются, второе указание t1 времени и ассоциированное второе значение d1 диспаратности.
В более позднее время TB принимается информация (t1, d1) и (t2, d2). Кроме того, в еще более позднее время TC принимается информация (t3, d3) и (t4, d4). Предоставляя в этой информации обновления текущее и следующее значение диспаратности, целевое устройство 3D, принимающее сигнал трехмерного изображения, может интерполировать между этими двумя моментами во времени, таким образом, допуская линейную интерполяцию, как указано на фиг.3A.
Альтернативная схема предоставлена на фиг.3B, здесь эффективно предоставлена та же информация, как было сделано со ссылкой на фиг.3B, но формат информации, сигнализирующей о диспаратности, отличается. Здесь, во время TA предоставляются три значения; (t0, d0), как описано в данном документе выше, и c0, c0, определяющие изменение диспаратности во времени.
Следует отметить, что оба примера, описанные выше со ссылкой на фиг.3A и 3B, включают в себя избыточные данные в том, что целевое устройство 3D, анализирующее входящий сигнал трехмерного изображения, принимает избыточную информацию; в принципе полностью, но первая пара данных (t0, d0) передается дважды. Строго говоря, это необязательно, поскольку целевое устройство 3D способно отслеживать эти значения на основе принятых данных.
Однако для того, чтобы создавать более надежную систему и сокращать время, требуемое для правильного доступа к контенту, может быть полезным время от времени повторять данные.
Дополнительное преимущество настоящего изобретения иллюстрировано на фиг.3C. Рассмотрим снова эту ситуацию, в которой сигнализирование о диспаратности существует на уровне страницы. Рассмотрим, например, ситуацию, в которой сигнал трехмерного изображения формируется для прямого эфира. В определенный момент времени TA, перед первым указанием t0 времени, диспаратность на уровне страницы задана в d0 (t0,d0). Принимая во внимание тот факт, что существует умеренная скорость изменения сцены, ожидается, что в дальнейший момент времени, второе указание t1 времени, диспаратность на уровне страницы должна быть d1 (t1, d1). Обе пары предоставляются в сегменте, сигнализирующем о диспаратности.
Однако в момент t0' между t0 и t1, в результате изменения в сцене, предыдущий прогнозирующий параметр уровня диспаратности (t1, d1) кажется ошибочным. Следовательно, настоящее изобретение предлагает "аннулировать" предыдущий прогноз и отправить новую информацию, сигнализирующую о диспаратности, новая информация, сигнализирующая о диспаратности, аннулирует ранее отправленную информацию.
Вышеописанным образом настоящее изобретение позволяет аннулировать ранее отправленные прогнозы посредством новых прогнозов. Дополнительно отметим, что, хотя в вышеописанном сценарии (t0', d0') значение находится где-то между (t0, d0) и (t1, d1). Однако это необязательно. В действительности, если ситуация требует, также возможно вставлять скачок диспаратности, хотя это должно быть сделано с умеренностью, поскольку это будет визуально заметно. Дополнительно отметим, что новый прогноз (t1, d1') в этом примере совпадает со вторым моментом d1 времени, однако это не всегда имеет место.
Касательно определения моментов времени, отметим, что может быть возможным указание моментов времени на основе, например, генератора тактовых импульсов, который доступен в целевом устройстве 3D, например, в приращениях в 90 КГц, однако оно может также быть основано вместо этого на номерах кадров. Разрешения, обеспечиваемого посредством номеров кадров, достаточно, чтобы обеспечивать правильное сигнализирование о диспаратности.
Как описано в данном документе выше, информация, сигнализирующая о диспаратности, после того, как определена, может нуждаться в упаковывании в сегменты данных для включения в сигнал трехмерного изображения. Таблица 1 предоставляет примерное описание сегмента, сигнализирующего о диспаратности. Таблица 1 четко показывает использование обновлений диспаратности на уровне страницы и/или обновлений диспаратности (под)областей. Как описано в данном документе выше, возможно для устройств, которые не поддерживают обновления диспаратности (под)областей, игнорировать эти поля и поддерживать только диспаратность на уровне страницы. Диспаратность на уровне страницы здесь предоставляется в поле page_default_disparity.
Отметим, что сегмент, сигнализирующий о диспаратности, не определяет области или объекты, а прежде всего фокусируется на сигнализировании о диспаратности. Подобласти, однако могут быть определены в этом сегменте для того, чтобы допускать обратную совместимость с DVB.
Таблица 1 показывает, что могут существовать множественные разобщенные подобласти в каждой области. Если это тот случай, значение subregion_id отличается от нуля.
subregion_disparity (с целой и дробной частью) применяется ко всей области, если subregion_id = 0. Однако существуют множественные подобласти (с различным id, большим, чем ноль), и для каждой подобласти задана диспаратность.
Контур области содержит всю информацию о диспаратности для каждой области и подобласти (если применимо), которая отличается от диспаратности по умолчанию для страницы.
Информация о диспаратности становится применимой в момент, определенный временной меткой представления (PTS), поставляемой с PES-пакетом, который содержит сегмент, сигнализирующий о диспаратности.
Здесь предлагается добавлять к каждому значению диспаратности в сегментах, сигнализирующих о диспаратности, второе (отличное) значение и значение периода времени, указывающее, когда (например, после какого количества кадров) ожидается достижение второго значения. Это выполняется вплоть до реализации целевого устройства 3D, чтобы вычислять подходящие промежуточные значения. Реализация может даже выбирать, использовать субпиксельную точность для этого или нет. Новая версия сегмента, сигнализирующего о диспаратности, может быть отправлена декодеру с PTS, указывающим, когда она становится действующей, чтобы, возможно, аннулировать текущее (промежуточное) состояние значений диспаратности. Если диспаратность известна заранее, обновления могут быть синхронизированы до момента, когда предшествующее обновление достигло своего финального значения. Для передач в реальном времени обновления могут отправляться с постоянными интервалами (например, раз в секунду), или они могут отправляться перед окончанием интервала, чтобы корректировать текущее направление.
Таблицы 2 и 3 показывают возможный синтаксис для page_disparity_updates и subregion_disparity_updates, соответственно.
В таблице 2 интервал может быть указан, например, в числе кадров, пока end_page_default_disparity не будет достигнут, и end_page_default_disparity соответствует значению диспаратности в конце интервала.
В таблице 3 интервал соответствует числу кадров до end_subregion_default_disparity. И значения end_subregion_disparity_integer_part и end_subregion_disparity_fractional_part представляют диспаратность в конце интервала с субпиксельной точностью.
Хотя форматирование данных в сигнале трехмерного изображения является важным, может быть предусмотрено изменение. Как иллюстрировано в данном документе ниже посредством таблиц 4, 5 и 6, соответственно.
о диспаратности
Фиг.4 показывает блок-схему устройства-источника 3D 50 согласно настоящему изобретению. Устройство-источник 3D содержит три функциональных блока; приемник RCV, выполненный с возможностью приема данных 51 многоракурсного изображения, блок INSP контроля, чтобы устанавливать информацию о глубине, и формирующий блок GEN для формирования сигнала трехмерного изображения. Источником данных 51 многоракурсного изображения может быть, но не обязательно, подаваемый материал с камеры прямой трансляции. Настоящее изобретение может также быть использовано с контентом, происходящим из линии задержки видеосигнала для подаваемого в реальном времени материала или традиционного устройства хранения для этой задачи. Хотя настоящее изобретение очень хорошо подходит для контента в реальном времени, оно может также быть использовано для предварительно записанного контента.
Данные 51 многоракурсного изображения могут, например, представлять стерео-видеоизображение в форме сжатых или несжатых стереопар. Альтернативно, многоракурсное изображение содержит более чем два ракурса. В изображенном примере данные 51 многоракурсного изображения являются несжатым видеопотоком, содержащим стереопары. Блок приемника в этом конкретном случае также сжимает входящие данные 51 многоракурсного изображения, тем самым, формируя первый компонент 52, содержащий данные многоракурсного изображения.
Несжатые данные 51 изображения отправляются блоку контроля, блок контроля выполнен с возможностью создания карты глубин "на лету". Альтернативно, входной поток может быть снабжен картой глубин, например, созданной с помощью дальномера или камеры глубины. Блок контроля также принимает данные 53 наложения для наложения на данные 51 многоракурсного изображения. В примерной реализации данные 53 наложения являются информацией субтитров, которые могут, например, быть введены вручную или сформированы на основе распознавания речи, и которые должны быть объединены с данными многоракурсного изображения.
Блок контроля выводит третий компонент 56 в форме информации, сигнализирующей о диспаратности, для включения в сформированный сигнал 56 трехмерного изображения. Поскольку блок контроля имеет доступ к информации о глубине, присутствующей в информации множества ракурсов, и имеет информацию о местоположении субтитров (как в этом примере), возможно позиционировать субтитры спереди объектов в данных многоракурсного изображения. Если присутствует недостаточный интервал глубин, доступный для размещения субтитров, блок контроля может дополнительно предоставлять информацию 59 об обрезании блоку сжатия для того, чтобы, например, обрезать левое и правое изображения так, чтобы приспосабливать общий диапазон глубин. После чего блок контроля повторно выполняет итерацию и может подготавливать информацию, сигнализирующую о диспаратности, для включения в выходной сигнал.
Затем, формирующий блок выполнен с возможностью формирования сигнала 56 трехмерного изображения в качестве выводимого устройством-источником 3D, на основе первого компонента в форме данных 52 многоракурсного изображения, данных 53 наложения и сегмента, сигнализирующего о диспаратности.
Специалистам в области техники будет ясно, что сжатие и управление обрезанием, которые описаны в данном документе выше со ссылкой на фиг.4, добавлены к преимуществам этого конкретного варианта осуществления, но не являются важными для изобретения.
Фиг.5 показывает блок-схему целевого устройства 3D 60 согласно настоящему изобретению. Целевое устройство 3D содержит приемник RCV для приема сигнала 56 трехмерного изображения согласно настоящему изобретению. Приемник может, например, быть DVB-приемником или блоком интерфейса отображения HDMI. Входящий сигнал 56 затем проходит через демультиплексор DMX, который извлекает соответствующие компоненты из сигнала трехмерного изображения и подготавливает компоненты для дополнительной последующей обработки. В этом примерном варианте осуществления рассматриваются принятый первый компонент 61, принятый второй компонент 62 и принятый третий компонент 63.
Принятый первый компонент 61 содержит данные многоракурсного изображения, второй компонент содержит данные наложения, а третий компонент содержит информацию, сигнализирующую о диспаратности. Эти три компонента впоследствии используются формирователем GEN для того, чтобы формировать два выходных изображения 68 и 69, которые соответствуют левому и правому изображениям соответствующих стереопар. Левое и правое изображения могут быть сформированы посредством корректного смещения объектов, расположенных в областях в соответствии с информацией, сигнализирующей о диспаратности, как описано со ссылкой на фиг.1A и 1B.
Как описано выше в данном документе, сигнал трехмерного изображения в соответствии с настоящим изобретением, предоставляет информацию, относящуюся к размещению наложений поверх отснятого во множестве ракурсов видеоматериала. В одном варианте осуществления такой сигнал трехмерного изображения является широковещательной, одноадресной или многоадресной трансляцией вещательной компании. Сигнал может, например, быть широковещательной трансляцией с помощью 3D-совместимой DVB-T версии, содержащей информацию, сигнализирующую о диспаратности, согласно настоящему изобретению. Когда такой сигнал трехмерного изображения принимается посредством STB, и STB использует информацию, сигнализирующую о диспаратности, чтобы правильно накладывать субтитры, STB может также пересылать информацию, сигнализирующую о диспаратности, последующим, расположенным дальше по потоку обработки устройствам, таким как устройство отображения.
В вышеупомянутом случае устройство отображения может использовать информацию, сигнализирующую о диспаратности, например, при формировании своего OSD, так что OSD устройства отображения не вступает в конфликт со стереоизображениями, принимаемыми телевизором (которые включают в себя наложенные субтитры).
Настоящее изобретение может также быть использовано, когда STB выбирает, помимо всего прочего, наложение своего OSD на стереоизображения, в этом случае STB должно адаптировать информацию, сигнализирующую о диспаратности, соответствующим образом, так что устройство отображения может также приспосабливаться.
Хотя настоящее изобретение объясняется, главным образом, со ссылкой на широковещательную трансляцию контента, например, с помощью DVB или ATSC, также возможно использовать настоящее изобретение при распространении контента через Интернет.
Фиг.7 показывает систему, применяющую устройство-источник 3D BCST и два целевых устройства STB и TV2 согласно настоящему изобретению. Сигнал трехмерного изображения согласно настоящему изобретению передается устройством-источником 3D через среду 71 передачи, такую как радиоканалы, Интернет или кабельное соединение, двум целевым устройствам STB и TV2. В этом случае целевое устройство 3D STB соединено посредством 3D-совместимого HDMI-интерфейса с устройством TV1 отображения.
Отметим, что настоящая заявка описывает две изобретенные концепции, которые предпочтительно объединены. Первая концепция относится к использованию единственного прогнозирующего параметра диспаратности в сигнализировании о диспаратности для использования в наложении в сигнале трехмерного изображения. Использование единственного прогнозирующего параметра имеет в качестве ключевого преимущества тот факт, что, при наложении информации поверх контента реального времени, плавный переход диспаратности может быть реализован способом, который не требует больших непроизводительных затрат. Вторая концепция относится к тому факту, что настоящее изобретение предлагает использовать сигнализирование о диспаратности с помощью одного или более прогнозирующих параметров, при этом эти один или более прогнозирующих параметров могут быть аннулированы новыми прогнозирующими параметрами. Таким образом, остается возможным использование прогнозирующих параметров для реализации плавных профилей диспаратности, в то же время все еще обеспечивая гибкость для приспосабливания отснятого в реальном времени видеоматериала. Кроме того, когда используется только единственный прогнозирующий параметр, может быть реализован плавный профиль диспаратности, и ухудшение эффективности, когда прогнозирующий параметр аннулируется, остается низким.
Хотя на всем протяжении текста заявки дается ссылка на информацию о диспаратности, специалистам в области техники хорошо известно, что глубина и диспаратность связаны. Действительно, когда доступна информация о сопоставлении глубины с диспаратностью, может быть возможным использование сигнализирования о глубине вместо сигнализирования о диспаратности.
Принимая во внимание вышеописанное, понятно, что сигнализирование о диспаратности на всем протяжении заявки также подразумевает включение в себя сигнализирования о глубине, предусматривающего, что предоставляется информация, чтобы сопоставлять значения глубины со значениями диспаратности.
Однако с точки зрения очевидного преимущества использования сигнализирования о диспаратности в том, что функция сопоставления не требуется, заявка и формула изобретения сформулированы со ссылкой только на сигнализирование о диспаратности.
Отметим, что изобретение может быть реализовано в аппаратных средствах и/или программном обеспечении с помощью программируемых компонентов, когда такие реализации могут рассматриваться полностью или частично на основе специализированных HW, ASIC, FPGA и/или PC.
Другие вариации в раскрытых вариантах осуществления могут быть поняты и выполнены специалистами в данной области техники, применяющими на практике заявленное изобретение, из изучения чертежей, раскрытия и прилагаемой формулы изобретения. В формуле изобретения слово "содержит" не исключает других элементов или этапов, а единственное число не исключает множества. Один процессор или другой блок может выполнять функции нескольких элементов, перечисленных в формуле изобретения. Простой факт того, что определенные меры упомянуты во взаимно разных зависимых пунктах формулы изобретения, не означает того, чтобы комбинация этих мер не может быть использована с выгодой. Все ссылки с номерами в формуле изобретения не должны рассматриваться как ограничивающие объем.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВСПОМОГАТЕЛЬНЫЕ ДАННЫЕ В ТРАНСЛЯЦИИ 3D ИЗОБРАЖЕНИЯ | 2011 |
|
RU2589307C2 |
| ОБРАБОТКА 3D ОТОБРАЖЕНИЯ СУБТИТРОВ | 2009 |
|
RU2517402C2 |
| КОМПЕНСАЦИЯ РАЗМЕРА ТРЕХМЕРНОГО ЭКРАНА | 2010 |
|
RU2559735C2 |
| КОМБИНИРОВАНИЕ 3D ВИДЕО И ВСПОМОГАТЕЛЬНЫХ ДАННЫХ | 2010 |
|
RU2554465C2 |
| СПОСОБ ПЕРЕДАЧИ ЦИФРОВЫХ УСЛУГ ПО СЕТИ И УСТРОЙСТВО, ОСУЩЕСТВЛЯЮЩЕЕ СПОСОБ | 2005 |
|
RU2353069C2 |
| ОБЪЕДИНЕНИЕ ДАННЫХ 3D ИЗОБРАЖЕНИЯ И ГРАФИЧЕСКИХ ДАННЫХ | 2010 |
|
RU2538335C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ОБРАБОТКИ ВХОДНОГО ТРЕХМЕРНОГО ВИДЕОСИГНАЛА | 2009 |
|
RU2519433C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБРАБОТКИ СИГНАЛА ДЛЯ ТРЕХМЕРНОГО ВОСПРОИЗВЕДЕНИЯ ДОПОЛНИТЕЛЬНЫХ ДАННЫХ | 2010 |
|
RU2510081C2 |
| МЕХАНИЗМ ВЫБОРА РЕЖИМА 3D ДЛЯ ВОСПРОИЗВЕДЕНИЯ ВИДЕО | 2008 |
|
RU2506708C2 |
| УСТРОЙСТВО ПЕРЕДАЧИ ДАННЫХ СТЕРЕОСКОПИЧЕСКОГО ИЗОБРАЖЕНИЯ, СПОСОБ ПЕРЕДАЧИ ДАННЫХ СТЕРЕОСКОПИЧЕСКОГО ИЗОБРАЖЕНИЯ И УСТРОЙСТВО ДЛЯ ПРИЁМА ДАННЫХ СТЕРЕОСКОПИЧЕСКОГО ИЗОБРАЖЕНИЯ | 2010 |
|
RU2530346C2 |
Изобретение относится к способу передачи данных трехмерного изображения. Технический результат - расширение арсенала технических средств. Предложено устройство-источник 3D для вывода сигнала трехмерного изображения, причем сигнал трехмерного изображения содержит данные многоракурсного изображения, причем устройство-источник 3D содержит вход для приема данных изображения; формирователь, выполненный с возможностью формирования сигнала трехмерного изображения на основе данных изображения, причем сигнал трехмерного изображения содержит первый компонент, содержащий множество 2D-изображений для использования в стереоскопическом визуальном отображении, второй компонент, содержащий данные наложения, и третий компонент, определяющий информацию, сигнализирующую о диспаратности, для использования в наложении данных изображения поверх соответствующих данных множества 2D-изображений. Новая информация, сигнализирующая о диспаратности, в дополнительном третьем компоненте аннулирует информацию, сигнализирующую о диспаратности, в третьем компоненте. 5 н. и 7 з.п. ф-лы, 6 табл., 9 ил.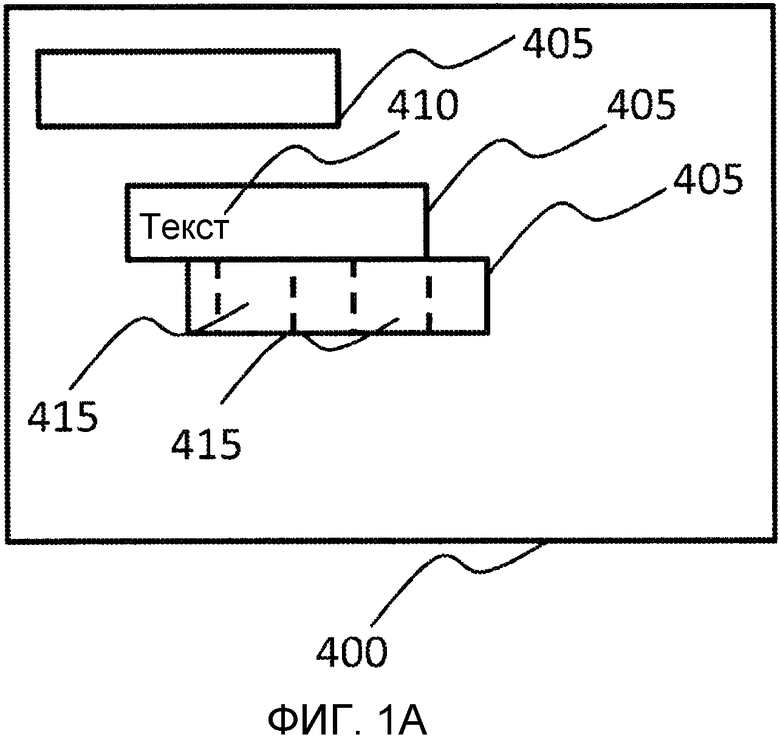
1. Устройство-источник 3D для вывода сигнала трехмерного изображения, причем сигнал трехмерного изображения содержит данные многоракурсного изображения, причем устройство-источник 3D содержит:
вход для приема данных изображения;
формирователь, выполненный с возможностью формирования сигнала трехмерного изображения на основе данных изображения, причем сигнал трехмерного изображения содержит:
первый компонент, содержащий множество 2D-изображений для использования в стереоскопическом визуальном отображении;
второй компонент, содержащий данные наложения;
третий компонент, определяющий информацию, сигнализирующую о диспаратности, для использования в наложении данных изображения поверх соответствующих данных множества 2D-изображений,
отличающееся тем, что третий компонент содержит параметр, определяющий информацию о диспаратности, имеющую изменяющийся во времени профиль диспаратности, для предоставления прогнозирующего параметра для указания того, как диспаратность наложения предполагает изменяться во времени; и
тем, что сигнал трехмерного изображения содержит дополнительный третий компонент в более позднее время в сигнале трехмерного изображения, чем третий компонент, определяющий новую информацию, сигнализирующую о диспаратности, для использования в наложении данных изображения поверх соответствующих данных множества 2D-изображений, дополнительный третий компонент содержит дополнительный параметр, определяющий новую информацию о диспаратности, имеющую новый, изменяющийся во времени профиль диспаратности, для предоставления дополнительного прогнозирующего параметра для указания того, как диспаратность наложения предполагает изменяться во времени,
причем новая информация, сигнализирующая о диспаратности, в дополнительном третьем компоненте аннулирует информацию, сигнализирующую о диспаратности, в третьем компоненте.
2. Устройство по п. 1, причем третий компонент содержит информацию, сигнализирующую о диспаратности, для использования в наложении данных наложения в области поверх соответствующих данных множества 2D-изображений.
3. Устройство по п. 1 или 2, причем третий компонент допускает сигнализирование для множества дизъюнктивных областей и/или подобластей.
4. Устройство по п. 1, причем информация, сигнализирующая о диспаратности, для изменяющегося во времени профиля диспаратности предоставляется в сегментах, сигнализирующих о диспаратности, и причем сегмент содержит единственный прогнозирующий параметр.
5. Целевое устройство 3D для приема сигнала трехмерного изображения, причем сигнал трехмерного изображения содержит данные многоракурсного изображения, причем целевое устройство 3D содержит:
приемник для приема сигнала трехмерного изображения;
демультиплексор для демультиплексирования сигнала трехмерного изображения в, по меньшей мере:
первый компонент, содержащий множество 2D-изображений для использования в стереоскопическом визуальном отображении;
второй компонент, содержащий данные наложения;
третий компонент, определяющий информацию, сигнализирующую о диспаратности, для использования в наложении данных изображения поверх соответствующих данных множества 2D-изображений,
отличающееся тем, что третий компонент содержит параметр, определяющий информацию о диспаратности, имеющую изменяющийся во времени профиль диспаратности, для предоставления прогнозирующего параметра для указания того, как диспаратность наложения предполагает изменяться во времени; и
дополнительный третий компонент в более позднее время в сигнале трехмерного изображения, чем третий компонент, определяющий новую информацию, сигнализирующую о диспаратности, для использования в наложении данных изображения поверх соответствующих данных множества 2D-изображений, причем дополнительный третий компонент содержит дополнительный параметр, определяющий новую информацию о диспаратности, имеющую новый, изменяющийся во времени профиль диспаратности, для предоставления дополнительного прогнозирующего параметра для указания того, как диспаратность наложения предполагает изменяться во времени,
причем новая информация, сигнализирующая о диспаратности, в дополнительном третьем компоненте аннулирует информацию, сигнализирующую о диспаратности, в третьем компоненте; и
тем, что целевое устройство 3D содержит формирователь для формирования соответствующих 2D-изображений для использования в стереоскопическом визуальном отображении, в котором данные наложения наложены, как определено в информации, сигнализирующей о диспаратности.
6. Устройство по п. 5, причем третий компонент содержит информацию, сигнализирующую о диспаратности, для использования в наложении данных наложения в области поверх соответствующих данных множества 2D-изображений.
7. Устройство по любому из пп. 5 и 6, причем третий компонент допускает сигнализирование для множества дизъюнктивных областей и/или подобластей.
8. Устройство по п. 5, причем информация, сигнализирующая о диспаратности, для изменяющегося во времени профиля диспаратности предоставляется в сегментах, сигнализирующих о диспаратности, и причем сегмент содержит единственный прогнозирующий параметр.
9. Устройство по любому из пп. 5 и 6 или 8, причем приемник является одним из:
- 3D IP TV-приемника,
- 3D ATSC-приемника,
- 3D-DVB-приемника,
- 3D HDMI-интерфейса приемника.
10. Способ создания сигнала трехмерного изображения, причем способ содержит этапы, на которых:
принимают данные изображения;
формируют сигнал трехмерного изображения на основе данных изображения, причем сигнал трехмерного изображения содержит:
первый компонент, содержащий множество 2D-изображений для использования в стереоскопическом визуальном отображении; второй компонент, содержащий данные наложения;
третий компонент, определяющий информацию, сигнализирующую о диспаратности, для использования в наложении данных изображения поверх соответствующих данных множества 2D-изображений,
отличающийся тем, что третий компонент содержит параметр, определяющий информацию о диспаратности, имеющую изменяющийся во времени профиль диспаратности, для предоставления прогнозирующего параметра для указания того, как диспаратность наложения предполагает изменяться во времени; и
тем, что сигнал трехмерного изображения содержит дополнительный третий компонент в более позднее время в сигнале трехмерного изображения, чем третий компонент, определяющий новую информацию, сигнализирующую о диспаратности, для использования в наложении данных изображения поверх соответствующих данных множества 2D-изображений, дополнительный третий компонент содержит дополнительный параметр, определяющий новую информацию о диспаратности, имеющую новый, изменяющийся во времени профиль диспаратности, для предоставления дополнительного прогнозирующего параметра для указания того, как диспаратность наложения предполагает изменяться во времени,
причем новая информация, сигнализирующая о диспаратности, в дополнительном третьем компоненте аннулирует информацию, сигнализирующую о диспаратности, в третьем компоненте.
11. Способ потребления сигнала трехмерного изображения, причем способ содержит этапы, на которых:
- принимают сигнал трехмерного изображения;
- демультиплексируют сигнал трехмерного изображения, по меньшей мере, в:
первый компонент, содержащий множество 2D-изображений для использования в стереоскопическом визуальном отображении;
второй компонент, содержащий данные наложения;
третий компонент, определяющий информацию, сигнализирующую о диспаратности, для использования в наложении данных изображения поверх соответствующих данных множества 2D-изображений,
отличающийся тем, что третий компонент содержит параметр, определяющий информацию о диспаратности, имеющую изменяющийся во времени профиль диспаратности, для предоставления прогнозирующего параметра для указания того, как диспаратность наложения предполагает изменяться во времени; и
дополнительный третий компонент в более позднее время в сигнале трехмерного изображения, чем третий компонент, определяющий новую информацию, сигнализирующую о диспаратности, для использования в наложении данных изображения поверх соответствующих данных множества 2D-изображений, дополнительный третий компонент содержит дополнительный параметр, определяющий новую информацию о диспаратности, имеющую новый, изменяющийся во времени профиль диспаратности, для предоставления дополнительного прогнозирующего параметра для указания того, как диспаратность наложения предполагает изменяться во времени,
причем новая информация, сигнализирующая о диспаратности, в дополнительном третьем компоненте аннулирует информацию, сигнализирующую о диспаратности, в третьем компоненте, и
тем, что способ содержит этап, на котором формируют соответствующие 2D-изображения для использования в стереоскопическом визуальном отображении, в котором данные наложения наложены, как определено в информации, сигнализирующей о диспаратности.
12. Компьютерный считываемый носитель информации, содержащий компьютерный программный продукт, сохраненный на нем, причем компьютерный программный продукт содержит инструкции, которые, когда выполняются на вычислительной платформе, выполняют способ по п. 10 или 11.
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| ОБРАБОТКА ИЗОБРАЖЕНИЙ | 2004 |
|
RU2317587C1 |

