Изобретение относится к области ускорительной техники и может быть использовано для моделирования микрометеоритов и техногенных частиц.
Известен ускоритель высокоскоростных твердых частиц, основанный на ускоряющей системе Слоуна-Лоуренса, состоящий из инжектора, линейного ускорителя, двух индукционных датчиков, цилиндрических электродов, источника фиксированного напряжения, усилителей, селектора скоростей, генератора управляемой частоты и мишени (Слеттери, Беккер, Хамерменш, Рой. Линейный ускоритель для моделирования микрометеоритов. (Приборы для научных исследований, 1973, т. 44, №6)
Наиболее близким аналогом является ускоритель высокоскоростных твердых частиц с автоподстройкой функции распределения частиц по радиусу (патент на изобретение №2451434, опубликован 20.05.2012). Ускоритель высокоскоростных твердых частиц содержит инжектор, индукционные датчики, усилители, линейный ускоритель, источник фиксированного высокого напряжения, цилиндрические электроды, селектор скоростей, согласно изобретению между второй парой индукционных датчиков и первым цилиндрическим электродом установлены четыре параллельных электрода, каждый из которых связан с блоком подачи напряжения на электроды, мишень выполнена из стекла, на поверхности которого нанесена пленка люминофора, а с обратной стороны его установлена ПЗС-матрица, соединенная с блоком обработки данных с ПЗС-матрицы, которое управляет блоком подачи напряжения на электроды
Недостатками данного изобретения являются невысокие функциональные возможности, то есть невозможность корректировать вектор скорости частицы в процессе ее полета.
Поставлена задача - корректировать вектор скорости частицы в процессе ее полета.
Поставленная задача достигается тем, что ускоритель высокоскоростных твердых частиц содержит инжектор, индукционные датчики, усилители, линейный ускоритель, источник фиксированного высокого напряжения, цилиндрические электроды, селектор скоростей, селектор удельных зарядов, блок подачи напряжения на электроды, цилиндрические электроды, генератор изменяемых во времени частоты и длительности импульсов в пачке, блок сопряжения, электронно-вычислительную машину, усилитель пачки импульсов переменной длительности, каскадный генератор, мишень, согласно изобретению в ускоритель введен блок контроля, который измеряет скорость и координаты частицы относительно оси цилиндрических электродов, и селектор координат, при этом блок контроля соединен с усилителем и селектором координат, который подсоединен к генератору изменяемых во времени частоты и длительности импульсов в пачке.
Сущность изобретения поясняется чертежами:
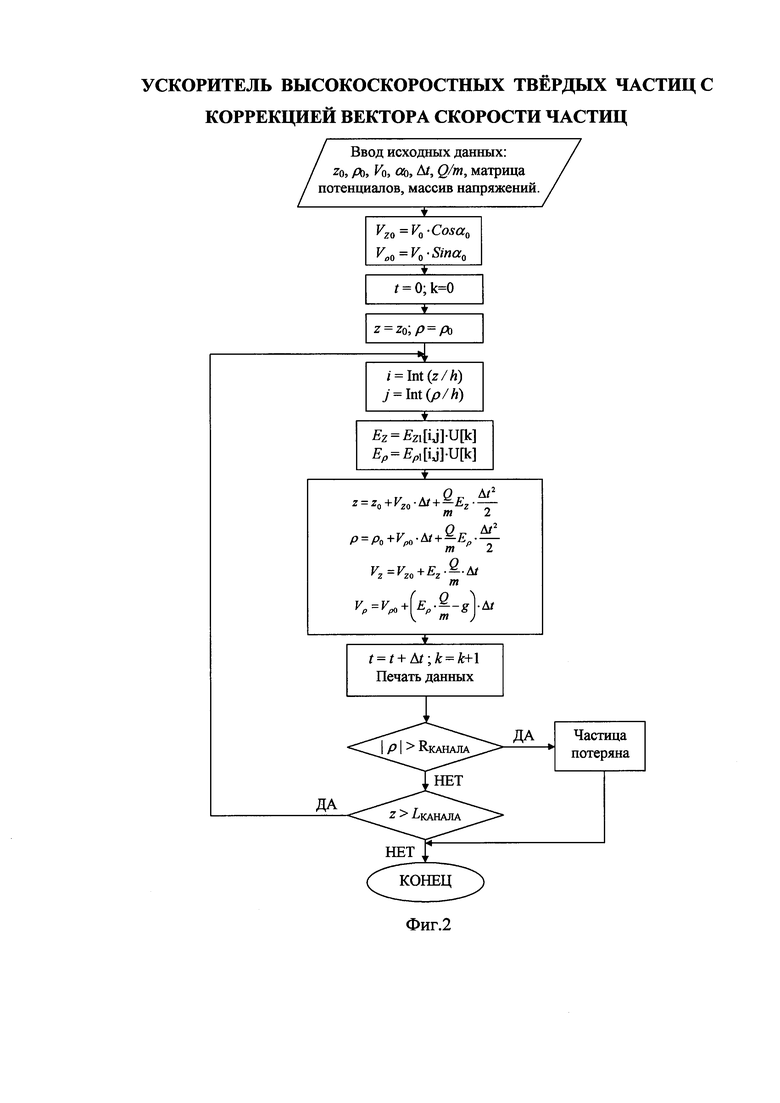
на фиг. 1 изображен общий вид ускорителя совместно с обслуживающей аппаратурой;
на фиг. 2 алгоритм программы построения траектории частицы, где координатная ось 0Z, совпадающая с осью ускорителя; VZ0, Vρ0 - продольная и радиальная составляющая начальной скорости частицы; VZ, Vρ - продольная и радиальная составляющая текущей скорости частицы; α0 - угол вылета частицы; z, ρ - координаты частицы по истечении времени Δt; Q - заряд частиц; m - масса частиц; Е - напряженность электрического поля в тракте ускорителя; RКАНАЛА, LКАНАЛА - внутренний радиус и длина цилиндрических электродов; h - шаг поля решения; k - номер итерации; g - ускорение свободного падения.
Устройство содержит инжектор 1, индукционные датчики 2, усилители 3, линейный ускоритель 4, источник фиксированного высокого напряжения 5, четыре параллельных электрода 6, селектор скоростей 7, селектор удельных зарядов 8, блок подачи напряжения на электроды 9, цилиндрические электроды 10, генератор изменяемых во времени частоты и длительности импульсов в пачке 11, блок сопряжения 12, электронно-вычислительную машину 13, усилитель пачки импульсов переменной длительности 14, каскадный генератор 15, блок обработки данных с ПЗС матрицы 16, мишень, состоящую из люминофора 17, нанесенного на стекло 18, ПЗС матрицы 19, блок контроля 20, селектор координат 21.
Первый индукционный датчик 2 соединен с входом соответствующего усилителя 3, выход первого усилителя 3 соединен с входом селектора скоростей 7 и входом селектора удельных зарядов 8, выход селектора скоростей 7 и выход селектора удельных зарядов 8 соединены с входами генератора изменяемых во времени частоты и длительности импульсов в пачке 11, выход генератора изменяемых во времени частоты и длительности импульсов в пачке 11 соединен с первым входом усилителя пачки импульсов переменной длительности 14, выходы которого соединены с цилиндрическими электродами 10, выход каскадного генератора 15 соединен со вторым входом усилителя пачки импульсов переменной длительности 14, выход третьего усилителя 3 соединен с входом блока сопряжения 12, который соединен с электронно-вычислительной машиной 13 и генератором изменяемых во времени частоты и длительности импульсов в пачке 11. Блок контроля 20, соединен с усилителем 3 и селектора координат 21 выход селектора координат соединен с генератором изменяемых во времени частоты и длительности импульсов в пачке 11.
Устройство работает следующим образом.
Инжектор 1 генерирует заряженные частицы в заданном диапазоне масс с частотой порядка 1 Гц. Заряженная частица последовательно проходит первый индукционный датчик 2, линейный ускоритель 4, блок контроля 20, цилиндрические электроды 10, третий индукционный датчик 2 и попадает на люминофор 17. Первая пара индукционных датчиков 2 и линейный ускоритель 4 предназначены для определения параметров частицы (удельного заряда Q/m и начальной скорости V0). Пролетая внутри индукционного датчика, частица наводит на него потенциал обратного заряду частицы знака. Так как датчик изготовлен из металла, то его поверхность эквипотенциальна, а значит не имеет значения, с какой части снимать напряжение. По поступающим с индукционных датчиков сигналов селектор скоростей 7 и селектор удельных зарядов 8 формируют на своих выходах цифровой код начальной скорости частицы и код ее удельного заряда. В селекторе скоростей 7 измеряются временные интервалы пролета частицей центров датчиков для первого датчика и блока контроля 20. Измеренные временные интервалы прямо пропорциональны скорости движения частицы. Пройдя через линейный ускоритель 4, частица получает приращение скорости. Аналогично первому датчику работает второй. По поданным в генератор изменяемых во времени частоты и длительности импульсов в пачке 11 кодам начальной скорости и удельного заряда на его выходе формируется пачка импульсов, которая создает ускоряющее поле между каждой парой электродов 10. Данное поле меняется во времени соответственно положению частицы в ускоряющем тракте. Параметры пачки выбираются из ряда данных для формирования импульсов, заранее заложенных в генератор изменяемых во времени частоты и длительности импульсов в пачке 11 с ЭВМ 13. Усилитель пачки импульсов переменной длительности 10 усиливает сформированные генератором изменяемых во времени частоты и длительности импульсов в пачке 11 импульсы. Усиленные импульсы поступают на цилиндрические электроды 10. Затем уже ускоренная частица попадает на мишень 17 и весь процесс повторяется. ЭВМ 13 производит статистику эксперимента и динамическое управление ускорителем. Удар по люминофору 17 вызывает свечение в месте удара, который регистрируется с помощью ПЗС матрицы 19. По информации, полученной с ПЗС, происходит выработка управляющих импульсов в блоке обработки данных с ПЗС 16 и происходит изменение напряжения на четырех электродах с помощью блока подачи напряжения на электроды 9, согласно формулам:




где U1, U2, U3, U4 - потенциалы, подаваемые на четыре электрода, k1, k2 - постоянные коэффициенты, U0 - постоянное напряжение на электродах, ΔХ - отклонения по оси 0Х места попадания частицы по мишени от центральной оси ускорителя, выработанные блоком обработки данных с ПЗС матрицы 16, ΔY - отклонения по оси 0Y места попадания частицы по мишени от центральной оси ускорителя, выработанные блоком обработки данных с ПЗС матрицы 16, где оси 0Х и 0Y расположены взаимно перпендикулярно друг к другу и перпендикулярны центральной оси ускорителя.
Регулировка заканчивается, когда частицы начнут попадать точно в центр мишени.
Коррекция вектора скорости частицы во время ее полета происходит следующим образом. Блок контроля 20 измеряет скорость и координаты частицы относительно оси цилиндрических электродов 10 и передает полученную информацию в селектор координат 21, где на основе алгоритма, приведенного на Фиг. 2, вырабатывается управляющий импульс для генератора изменяемых во времени частоты и длительности импульсов в пачке 11.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСКОРИТЕЛЬ ВЫСОКОСКОРОСТНЫХ ТВЕРДЫХ ЧАСТИЦ С АВТОПОДСТРОЙКОЙ ФУНКЦИИ РАСПРЕДЕЛЕНИЯ ЧАСТИЦ ПО РАДИУСУ МИШЕНИ | 2010 |
|
RU2451434C1 |
| УСКОРИТЕЛЬ ВЫСОКОСКОРОСТНЫХ ТВЕРДЫХ ЧАСТИЦ | 2011 |
|
RU2487505C2 |
| УСКОРИТЕЛЬ ВЫСОКОСКОРОСТНЫХ ТВЕРДЫХ ЧАСТИЦ | 2008 |
|
RU2371891C1 |
| УСКОРИТЕЛЬ ВЫСОКОСКОРОСТНЫХ ТВЕРДЫХ ЧАСТИЦ | 2010 |
|
RU2447626C2 |
| УСКОРИТЕЛЬ ВЫСОКОСКОРОСТНЫХ ТВЕРДЫХ ЧАСТИЦ | 2001 |
|
RU2205525C2 |
| УСКОРИТЕЛЬ ВЫСОКОСКОРОСТНЫХ ТВЕРДЫХ ЧАСТИЦ | 2012 |
|
RU2534227C2 |
| Ускоритель высокоскоростных твердых частиц | 2018 |
|
RU2692236C1 |
| ЦИКЛИЧЕСКИЙ УСКОРИТЕЛЬ ВЫСОКОСКОРОСТНЫХ ТВЕРДЫХ ЧАСТИЦ | 2006 |
|
RU2335868C1 |
| РЕЗОНАНСНЫЙ УСКОРИТЕЛЬ ПЫЛЕВЫХ ЧАСТИЦ | 2013 |
|
RU2551652C1 |
| ИМПУЛЬСНЫЙ УСКОРИТЕЛЬ ТВЕРДЫХ ЧАСТИЦ | 2012 |
|
RU2523666C1 |

Изобретение относится к области ускорительной техники и может быть использовано для моделирования микрометеоритов и техногенных частиц. Ускоритель высокоскоростных твердых частиц содержит инжектор, индукционные датчики, усилители, линейный ускоритель, источник фиксированного высокого напряжения, цилиндрические электроды, селектор скоростей, селектор удельных зарядов, блок подачи напряжения на электроды, цилиндрические электроды, генератор изменяемых во времени частоты и длительности импульсов в пачке, блок сопряжения, электронно-вычислительную машину, усилитель пачки импульсов переменной длительности, каскадный генератор, мишень, согласно изобретению в ускоритель введен блок контроля и селектор координат, при этом блок контроля соединен к селектору координат, который подсоединен к генератору изменяемых во времени частоты и длительности импульсов в пачке. Технический результат - возможность корректировать вектор скорости частицы в процессе ее полета. 2 ил.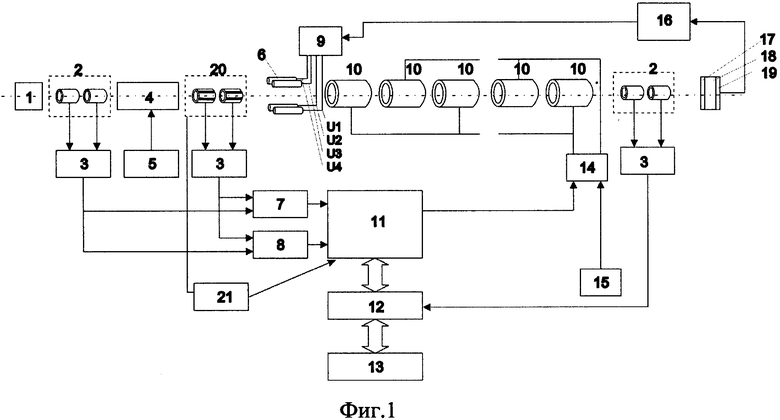
Ускоритель высокоскоростных твердых частиц, содержащий инжектор, индукционные датчики, усилители, линейный ускоритель, источник фиксированного высокого напряжения, цилиндрические электроды, селектор скоростей, селектор удельных зарядов, блок подачи напряжения на электроды, генератор изменяемых во времени частоты и длительности импульсов в пачке, блок сопряжения, электронно-вычислительную машину, усилитель пачки импульсов переменной длительности, каскадный генератор, мишень, отличающийся тем, что в ускоритель введен блок контроля, который измеряет скорость и координаты частицы относительно оси цилиндрических электродов, и селектор координат, при этом блок контроля соединен с усилителем и селектором координат, который подсоединен к генератору изменяемых во времени частоты и длительности импульсов в пачке.
| УСКОРИТЕЛЬ ВЫСОКОСКОРОСТНЫХ ТВЕРДЫХ ЧАСТИЦ С АВТОПОДСТРОЙКОЙ ФУНКЦИИ РАСПРЕДЕЛЕНИЯ ЧАСТИЦ ПО РАДИУСУ МИШЕНИ | 2010 |
|
RU2451434C1 |
| УСКОРИТЕЛЬ ВЫСОКОСКОРОСТНЫХ ТВЕРДЫХ ЧАСТИЦ | 2001 |
|
RU2205525C2 |
| УСКОРИТЕЛЬ ВЫСОКОСКОРОСТНЫХ ТВЕРДЫХ ЧАСТИЦ | 2008 |
|
RU2371891C1 |
| US 4899084A, 06.02.1990 | |||
| US 5140158A, 18.08.1992. | |||

