Изобретение относится к медицинской технике и может быть использовано при выполнении различных медицинских процедур.
Известна функциональная структура выдвижных элементов зажила (удержания) и их позиционное расположение внутри сферического корпуса многофункциональной диагностико-хирургической робототехнической системы с возможностью информационно-компьютерного управления (см. Патент UA №72486), включающая общий корпус робототехнической системы с внешней сферической поверхностью и с боковым отверстием круглой формы, внутри которого в исходном положении расположена последовательность корпусов выдвижных элементов промежуточного разворота с помощью соответствующего привода с редуктором продольного разворота, последний корпус элементов разворота выполнен из первой части последнего корпуса, который включает привод с редуктором осевого разворота, шестеренка которого функционально соединена с шестеренкой с осевым стержнем с двумя подшипниками разворота, которые зафиксированы в конце первой части корпуса, а конец осевого стержня закреплен в начале второй части последнего корпуса, в котором закреплен привод с редуктором разворота, шестеренка которого функционально соединена с шестеренкой, на которой закреплено устройство элемента зажима корпусов медицинских инструментов, которое включает привод с редуктором и специальную пластину для ориентированного удержания корпусов медицинских инструментов (прототип).
Известный прототип имеет технологические возможности, которые заключаются в том, что функциональная структура выдвижного устройства зажима (фиксатора) медицинского инструмента многофункциональной диагностико-хирургической робототехнической системы с другими выдвижными устройствами зажима расположены в одном общем корпусе и выполнены с возможностью разворота, смещения и удержания различных медицинских инструментов над медицинским столом.
Недостатком известной функциональной структуры осевого возвратно-поступательного разворота электромагнитного фиксатора медицинского и диагностического инструмента в робототехнической системе является сложность устройства элемента зажима корпусов медицинских инструментов, поскольку для выполнения процедуры удержания корпусов медицинских инструментов необходим привод с редуктором и специальная пластина для ориентированного удержания корпусов медицинских инструментов.
Указанный технический результат достигается следующей функциональной структурой.
Функциональная структура осевого возвратно-поступательного разворота электромагнитного фиксатора медицинского и диагностического инструмента в тороидальной хирургической робототехнической системе, включающая привод с редуктором осевого разворота, шестеренка которого функционально соединена с шестеренкой осевого разворота со стержнем, на котором зафиксированы подшипники, общий корпус робототехнической системы с линейными приводами, на выдвижной части которых с возможностью разворота расположена последовательность корпусов выдвижных элементов разворота посредством соответствующего привода с редуктором, при этом последний корпус выдвижных элементов выполнен из двух частей, при этом первая часть последнего корпуса выдвижных элементов функционально соединена с приводом с редуктором предпоследнего корпуса выдвижных элементов, а во второй части последнего корпуса разворота выдвижных элементов с одной стороны закреплен привод с редуктором, шестеренка которого соединена с шестеренкой разворота корпусов удержания медицинских инструментов, при этом общий корпус робототехнической системы выполнен тороидальной формы с внутренней выдвижной частью со сферической крышкой с возможностью подъема, соосно которой в нижней ее части зафиксирован инструментальный стол с возможностью возвратно-поступательного разворота и с электромагнитными устройствами удержания медицинских инструментов, при этом несколько линейных приводов, в которых выдвижная часть ориентирована вертикально вверх, расположены равномерно по кругу в нижней части общего корпуса и их нижние части зафиксированы на общей пластине или индивидуальной пластине с возможностью возвратно-поступательного разворота внутри тороидального общего корпуса робототехнической системы, при этом с другой стороны второй части последнего корпуса зафиксирован привод с редуктором осевого разворота, где также закреплены подшипники стержня шестеренки осевого разворота, а на конце стержня шестеренки осевого разворота выполнена резьба, которая зафиксирована в резьбовом ортогональном отверстии стержня первой части последнего корпуса, в котором выполнено продольное отверстие с резьбой, в которой закреплена резьбовая часть стержня разворота предпоследнего корпуса выдвижных элементов, а на стержне разворота зафиксирована шестеренка, которая функционально соединена с шестеренкой привода с редуктором предпоследнего корпуса выдвижных элементов, а в корпусах удержания медицинских инструментов закреплены смещенные друг относительно друга два электромагнита для электромагнитного удержания корпусов медицинских инструментов.
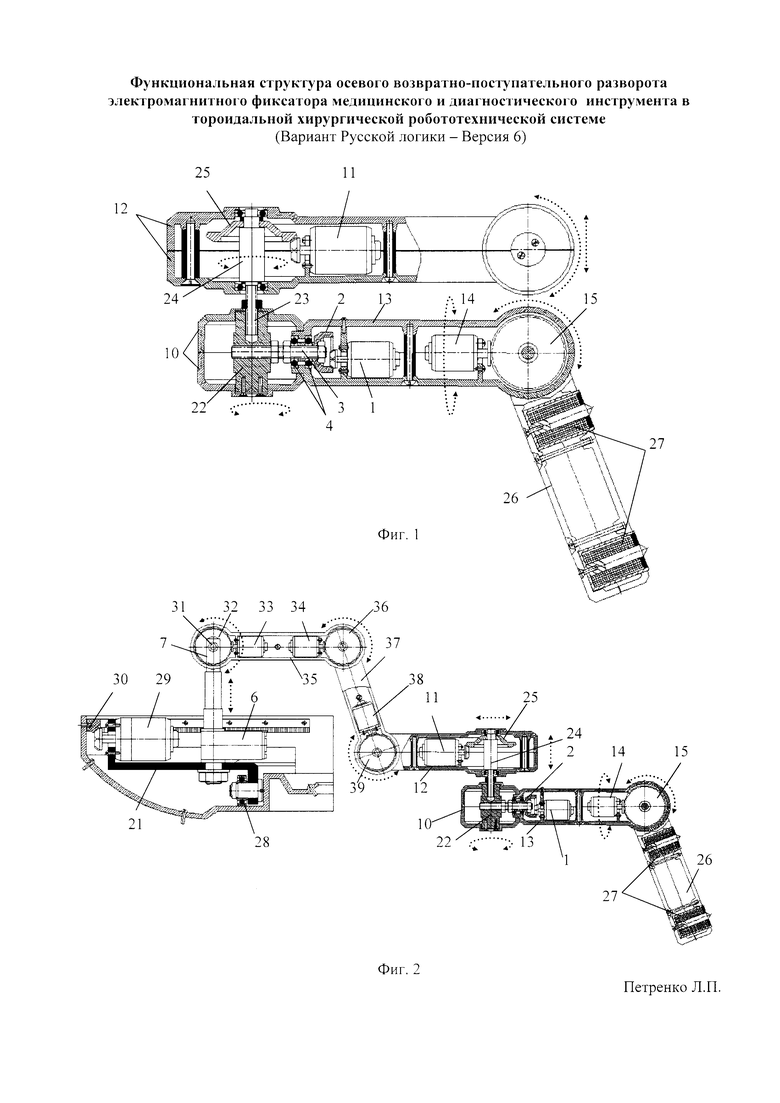
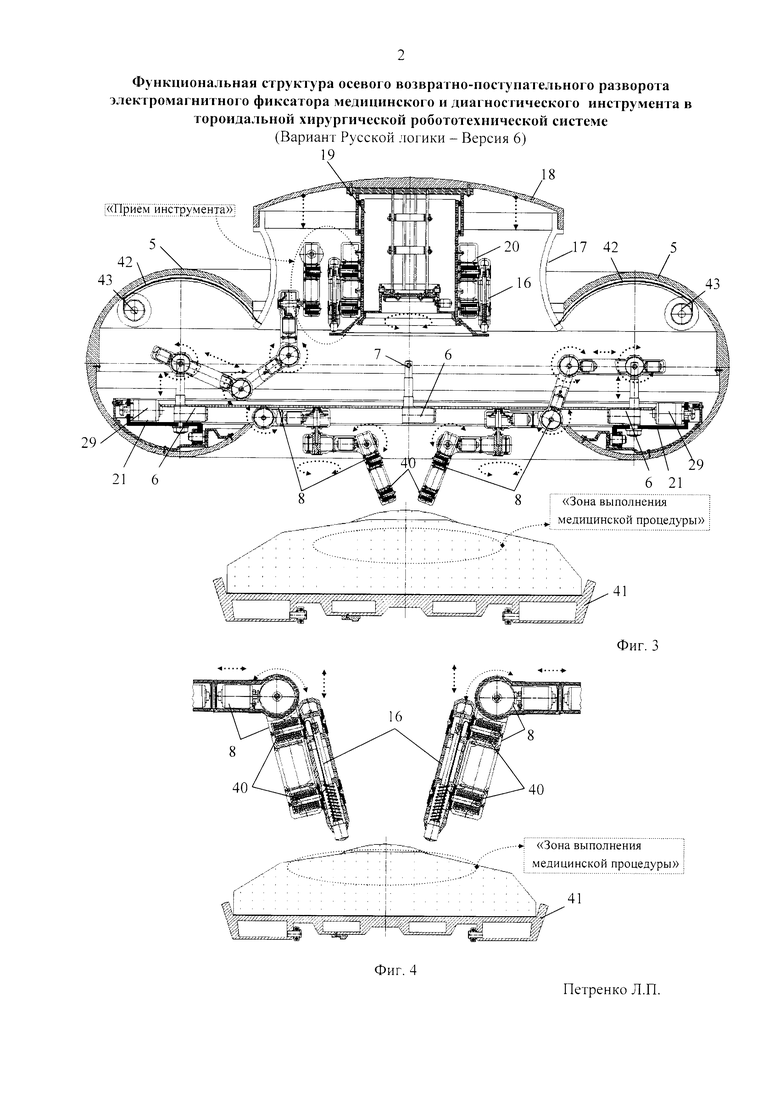
На фиг.1 изображена функциональная структура первой и второй части последнего корпуса выдвижных элементов, которые функционально соединены с одной стороны с функциональной структурой предпоследнего корпуса выдвижных элементов с возможностью разворота, а с другой стороны функционально соединены с корпусом электромагнитного удержания корпусов медицинского инструмента. На фиг.2 изображена последовательность корпусов выдвижных элементов в одном из возможных позиционных положений. На фиг.3 изображена робототехническая система тороидальной формы с внутренней выдвижной частью со сферической крышкой с возможностью подъема, соосно которой в нижней ее части зафиксирован медицинский стол с возможностью возвратно-поступательного разворота и с электромагнитными устройствами удержания медицинских инструментов. На фиг.4 изображено позиционное положение выдвижных электромагнитных устройств удержания корпусов медицинского инструмента над верхней частью медицинского стола.
Функциональная структура осевого возвратно-поступательного разворота электромагнитного фиксатора медицинского и диагностического инструмента в тороидальной хирургической робототехнической системе, включающая привод с редуктором осевого разворота 1, шестеренка которого функционально соединена с шестеренкой осевого разворота 2 со стержнем 3, на котором зафиксированы подшипники 4, общий корпус 5 (фиг.3) робототехнической системы с линейными приводами 6, на выдвижной части 7 которых с возможностью разворота расположена последовательность корпусов выдвижных элементов 8 разворота посредством соответствующего привода с редуктором, при этом последний корпус 9 (фиг.1) выдвижных элементов выполнен из двух частей, при этом первая часть 10 последнего корпуса выдвижных элементов функционально соединена с приводом с редуктором 11 предпоследнего корпуса 12 выдвижных элементов, а во второй части 13 последнего корпуса разворота выдвижных элементов с одной стороны закреплен привод с редуктором 14, шестеренка которого соединена с шестеренкой разворота 15 корпусов удержания медицинских инструментов 16. При этом общий корпус 5 робототехнической системы выполнен тороидальной формы с внутренней выдвижной частью 17 (фиг.3) со сферической крышкой 18 с возможностью подъема, соосно которой в нижней ее части зафиксирован инструментальный стол 19 с возможностью возвратно-поступательного разворота и с электромагнитными устройствами 20 удержания медицинских инструментов 16, при этом несколько линейных приводов 6, в которых выдвижная часть 7 ориентирована вертикально вверх, расположены равномерно по кругу в нижней части общего корпуса 5 и их нижние части зафиксированы на общей пластине или индивидуальной пластине 21 с возможностью возвратно-поступательного разворота внутри тороидального общего корпуса 5 робототехнической системы, при этом с другой стороны второй части 13 последнего корпуса зафиксирован привод с редуктором осевого разворота 1, где также закреплены подшипники 4 стержня 3 шестеренки осевого разворота 2, а на конце стержня 3 шестеренки осевого разворота 2 выполнена резьба, которая зафиксирована в резьбовом ортогональном отверстии стержня 22 первой части 10 последнего корпуса, в котором выполнено продольное отверстие с резьбой 23, в которой закреплена резьбовая часть стержня 24 разворота предпоследнего корпуса 12 выдвижных элементов, а на стержне разворота 24 зафиксирована шестеренка 25, которая функционально соединена с шестеренкой привода с редуктором 11 предпоследнего корпуса 12 выдвижных элементов, а в корпусах 26 удержания медицинских инструментов закреплены смещенные друг относительно друга два электромагнита 27 для электромагнитного удержания корпусов медицинских инструментов. При этом (фиг.2) общая пластина или индивидуальная пластина 21 включает несколько опорных подшипников 28, привод с редуктором 29, шестеренка которого функционально соединена с шестеренкой 30, которая закреплена в общем корпусе 2 робототехнической системы, а на выдвижной части 7 линейного привода 6 зафиксирован осевой стержень 31 первой шестеренки разворота 32, которая функционально соединена с шестеренкой первого привода разворота 33, а шестеренка второго привода 34 в первом корпусе разворота 35 функционально соединена со второй шестеренкой 36 разворота выдвижных элементов, осевой стержень которой зафиксирован в начале второго корпуса 37 разворота выдвижных элементов, в конце которого закреплен третий привод разворота 38, шестеренка которого функционально соединена с третьей шестеренкой разворота 39 корпусов выдвижных элементов. На фиг.3 изображено позиционное положение общего корпуса 5 тороидальной хирургической робототехнической системы с выдвижными элементами 8 и с электромагнитными устройствами 40 удержания корпусов 16 хирургических и диагностических устройств в зоне «Прием инструмента» и позиционное положение выдвижных элементов 8 электромагнитного удержания корпусов 16 хирургических и диагностических устройств в «Зоне выполнения медицинской процедуры» над верхней подвижной частью медицинского стола 41. При этом съемная верхняя часть выдвижной крышки 18 сферической формы соосно расположена на внутренней выдвижной части 17 общего корпуса 5 тороидальной хирургической робототехнической системы, которая в нижней части соединена с первыми концами трех тросов 42, а вторые концы их зафиксированы на намоточном устройстве привода 43 для подъема выдвижной крышки 18 и инструментального стола 19. На фиг.4 изображено позиционное положение корпусов 16 хирургических и диагностических устройств с электромагнитными устройствами 40 их удержания в «Зоне выполнения медицинской процедуры».
Процедура осевого возвратно-поступательного разворота электромагнитного фиксатора медицинского и диагностического инструмента в тороидальной хирургической робототехнической системе заключается в следующем.
Перед выполнением медицинской процедуры (фиг.3 и 4) перед подъемом выдвижной крышки 18 и выдвижной части 17 или после их подъема верхнюю ее часть 18 снимают вместе с инструментальным столом 19 и в его электромагнитные устройства 20 по кругу вставляют корпуса 16 хирургических и диагностических устройств, после чего возвращают выдвижную крышку 18 в исходное положение на выдвижную часть 17 для выполнения различных медицинских процедур в «Зоне выполнения медицинской процедуры», а для реализации ее выполняют подъем выдвижной крышки 18 и выдвижной части 17 с инструментальным столом 19 и выполняют разворот последовательных корпусов выдвижных элементов 8 предварительно в зону «Приема инструмента», а затем в «Зону выполнения медицинской процедуры» над медицинским столом 41, и при ее реализации возникает необходимость вертикального подъема и разворота электромагнитных устройств 40 удержания корпусов 16 хирургических и диагностических инструментов. И эту процедуру вертикального подъема выполняют посредством выдвижной части 7 линейного привода 6 (фиг.1 и 2), а корректировочный разворот электромагнитных устройств 40, в котором зафиксированы два электромагнита 27, выполняют посредством привода с редуктором 14 и шестеренки 15, а также посредством привода с редуктором 11 и шестеренки 25, а корректировочный осевой разворот электромагнитных устройств удержания корпусов 16 хирургических и диагностических инструментов выполняют посредством привода с редуктором осевого разворота 1, шестеренка которого функционально соединена с шестеренкой осевого разворота 2.
Использование предложенного технического решения позволяет упростить функциональную структуру осевого возвратно-поступательного разворота электромагнитного фиксатора медицинского и диагностического инструмента в тороидальной хирургической робототехнической системе и повысить точность взаимного разворота элементов выдвижного устройства зажима (фиксатора) медицинского инструмента в тороидальной хирургической робототехнической системе с выдвижной крышкой.
Изобретение относится к медицинской технике и может быть использовано при выполнении различных медицинских процедур. Функциональная структура осевого возвратно-поступательного разворота электромагнитного фиксатора медицинского и диагностического инструмента в тороидальной хирургической робототехнической системе, в котором общий корпус робототехнической системы выполнен тороидальной формы с внутренней выдвижной частью со сферической крышкой с возможностью подъема, соосно которой в нижней ее части зафиксирован инструментальный стол с возможностью возвратно-поступательного разворота и с электромагнитными устройствами удержания медицинских инструментов, при этом несколько линейных приводов, в которых выдвижная часть ориентирована вертикально вверх, расположены равномерно по кругу в нижней части общего корпуса и их нижние части зафиксированы на общей пластине или индивидуальной пластине с возможностью возвратно-поступательного разворота внутри тороидального общего корпуса робототехнической системы, при этом с другой стороны второй части последнего корпуса зафиксирован привод с редуктором осевого разворота, где также закреплены подшипники стержня шестеренки осевого разворота, а на конце стержня шестеренки осевого разворота выполнена резьба, которая зафиксирована в резьбовом ортогональном отверстии стержня первой части последнего корпуса, в котором выполнено продольное отверстие с резьбой, в которой закреплена резьбовая часть стержня разворота предпоследнего корпуса выдвижных элементов, а на стержне разворота зафиксирована шестеренка, которая функционально соединена с шестеренкой привода с редуктором предпоследнего корпуса выдвижных элементов, а в корпусах удержания медицинских инструментов закреплены смещенные друг относительно друга два электромагнита для электромагнитного удержания корпусов медицинских инструментов. 4 ил.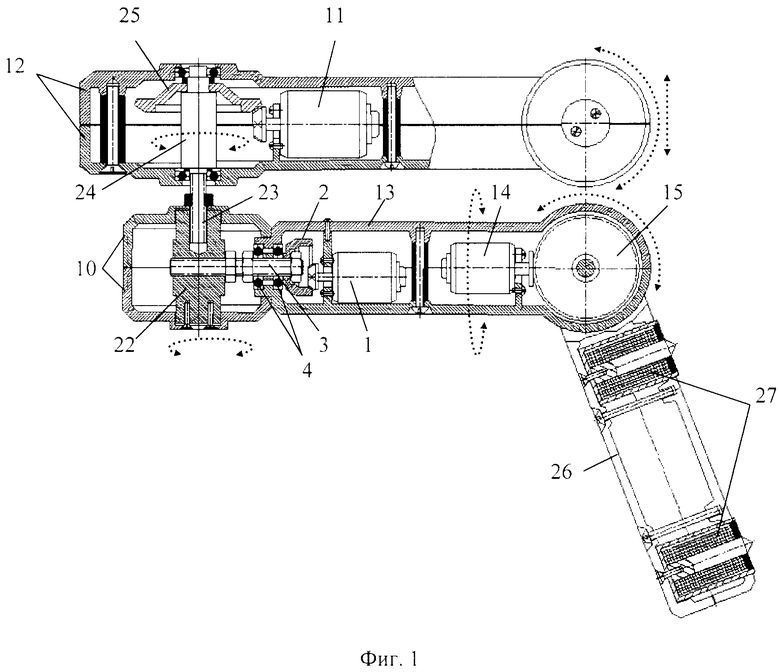
Функциональная структура осевого возвратно-поступательного разворота электромагнитного фиксатора медицинского и диагностического инструмента в тороидальной хирургической робототехнической системе, включающая привод с редуктором осевого разворота, шестеренка которого функционально соединена с шестеренкой осевого разворота со стержнем, на котором зафиксированы подшипники, общий корпус робототехнической системы с линейными приводами, на выдвижной части которых с возможностью разворота расположена последовательность корпусов выдвижных элементов разворота посредством соответствующего привода с редуктором, при этом последний корпус выдвижных элементов выполнен из двух частей, при этом первая часть последнего корпуса выдвижных элементов функционально соединена с приводом с редуктором предпоследнего корпуса выдвижных элементов, а во второй части последнего корпуса разворота выдвижных элементов с одной стороны закреплен привод с редуктором, шестеренка которого соединена с шестеренкой разворота корпусов удержания медицинских инструментов, отличающаяся тем, что общий корпус робототехнической системы выполнен тороидальной формы с внутренней выдвижной частью со сферической крышкой с возможностью подъема, соосно которой в нижней ее части зафиксирован инструментальный стол с возможностью возвратно-поступательного разворота и с электромагнитными устройствами удержания медицинских инструментов, при этом несколько линейных приводов, в которых выдвижная часть ориентирована вертикально вверх, расположены равномерно по кругу в нижней части общего корпуса и их нижние части зафиксированы на общей пластине или индивидуальной пластине с возможностью возвратно-поступательного разворота внутри тороидального общего корпуса робототехнической системы, при этом с другой стороны второй части последнего корпуса зафиксирован привод с редуктором осевого разворота, где также закреплены подшипники стержня шестеренки осевого разворота, а на конце стержня шестеренки осевого разворота выполнена резьба, которая зафиксирована в резьбовом ортогональном отверстии стержня первой части последнего корпуса, в котором выполнено продольное отверстие с резьбой, в которой закреплена резьбовая часть стержня разворота предпоследнего корпуса выдвижных элементов, а на стержне разворота зафиксирована шестеренка, которая функционально соединена с шестеренкой привода с редуктором предпоследнего корпуса выдвижных элементов, а в корпусах удержания медицинских инструментов закреплены смещенные друг относительно друга два электромагнита для электромагнитного удержания корпусов медицинских инструментов.
| Способ определения влажности | 1941 |
|
SU72486A1 |
| Способ борьбы с искажениями телеграфных сигналов | 1946 |
|
SU72485A1 |
| JP 2010206495 A, 16.09.2010. | |||

