ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к строительному оборудованию для шахт и наклонных стволов скважин, в частности к способу и механическому устройству предотвращения отклонения направляющего каната, которые применимы для строительства сверхглубоких вертикальных шахт.
УРОВЕНЬ ТЕХНИКИ
В Китае постепенное исчерпание минеральных ресурсов неглубокого и среднеглубокого залегания привело к неизбежной необходимости разработки ресурсов глубокого залегания для обеспечения устойчивого развития национальной экономики. Следствием этого является настоятельная необходимость в создании сверхглубоких вертикальных шахт, которая выдвигает более высокие требования к безопасности транспортировки персонала и материалов. В настоящее время в большинстве направляющих рам для глубоких вертикальных шахт в качестве направляющих канатов также используют два подвесных каната, предварительно натянутых за счет собственного веса направляющей рамы. Такая система относится к обычной подвесной направляющей системе с параллельными гибкими кабелями, которая в основном предназначена для обеспечения направляющей функции для перемещения подъемной емкости. Если предварительное натяжение направляющего каната подвесной направляющей системы слишком мало, подъемная емкость может значительно отклоняться или даже перевернуться при своем прохождении вдоль направляющего каната, что ставит под угрозу безопасность и жизнь строительных рабочих. В этой связи в "Технических требованиях к строительству и приемке шахт и наклонных стволов скважин" указано, что при использовании направляющей из стального каната сила натяжения на 100 м стального проволочного каната не должна быть меньше 1 тонны; кроме того, в "Правилах техники безопасности в угольной шахте" указано, что коэффициент запаса прочности тросовой направляющей должен быть не ниже 6. Для сверхглубокой вертикальной шахты предварительное натяжение должно быть увеличено с увеличением длины направляющего каната. Однако это требование не может быть соблюдено только за счет собственного веса направляющей рамы; и в противном случае отклонение подъемной емкости будет очень серьезным; при этом, даже если предварительное натяжение соответствует этому требованию, стальной проволочный канат не может быть выбран из стандартных продуктов вследствие очень большого предварительного натяжения и с учетом ограничений прочности на разрыв и коэффициента запаса прочности. Следствием этого является сложность предотвращения отклонения направляющего каната в подвесной системе с параллельными гибкими кабелями, что серьезно угрожает безопасности при строительстве сверхглубоких вертикальных шахт.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задача изобретения
Задачей настоящего изобретения является обеспечение создания механического устройства и способа предотвращения отклонения направляющего каната, чтобы решить проблему сложного предотвращения отклонения направляющего каната в существующих подвесных направляющих системах с параллельными гибкими кабелями при строительстве сверхглубоких вертикальных шахт.
Чтобы решить техническую проблему, описанную выше, настоящее изобретение использует следующие технические решения.
Механическое устройство предотвращения отклонения направляющего каната, содержащее "Т"-образную монтажную опору, поворотную раму, гидравлическое опорное средство и средство захвата, причем "Т" образная монтажная опора содержит продольный опорный стержень и поперечный опорный стержень, при этом продольный опорный стержень закреплен на стенке шахты, и один конец поперечного опорного стержня прикреплен к центральной части продольного опорного стержня; гидравлическое опорное средство содержит верхний гидравлический опорный стержень и нижний гидравлический опорный стержень, один конец верхнего гидравлического опорного стержня шарнирно прикреплен к верхнему концу продольного опорного стержня, и один конец нижнего гидравлического опорного стержня шарнирно прикреплен к нижнему концу продольного опорного стержня; поворотная рама содержит верхний "Y"-образный держатель и нижний "Y"-образный держатель, один конец верхнего "Y"-образного держателя шарнирно прикреплен к другому концу верхнего гидравлического опорного стержня, один конец нижнего "Y"-образного держателя шарнирно прикреплен к другому концу нижнего идравлического опорного стержня, а другой конец верхнего "Y"-образного держателя прикреплен к другому концу нижнего "Y"-образного держателя, и оба указанных конца шарнирно прикреплены к другому концу поперечного опорного стержня; средство захвата содержит верхний захват и нижний захват, при этом верхний захват прикреплен к третьему концу верхнего "Y"-образного держателя, а нижний захват прикреплен к третьему концу нижнего "Y"-образного держателя;
Когда поворотная рама совершает поворот вокруг указанного другого конца поперечного опорного стержня в положение, в котором нижний захват находится в горизонтальном положении, верхний захват оказывается в положении наклона вверх; когда поворотная рама совершает поворот вокруг указанного другого конца поперечного опорного стержня в положение, в котором верхний захват находится в горизонтальном положении, нижний захват оказывается в положении наклона вниз.
В механическом устройстве предотвращения отклонения направляющего каната в соответствии с настоящим изобретением, кроме того, указанный верхний "Y"-образный держатель и указанный нижний "Y"-образный держатель имеют одну и ту же конструкцию, третий конец верхнего "Y"-образного держателя и третий конец нижнего "Y"-образного держателя выполнены с полой стальной деталью соответственно, при этом полая стальная деталь имеет болтовое отверстие, и крепежный болт размещен в указанном болтовом отверстии; верхний захват и нижний захват содержат "V"-образный захват и круглую стальную деталь, при этом "V"-образный захват имеет канавку, выполненную с возможностью охватывания направляющего каната, один конец круглой стальной детали прикреплен к "V"-образному захвату, а другой конец круглой стальной детали проходит в трубу полой стальной детали и прикреплен крепежным болтом.
Способ предотвращения отклонения направляющего каната, в котором каждые два механические устройства предотвращения отклонения направляющих канатов, описанные выше, размещены в группе, и по меньшей мере две группы механических устройств предотвращения отклонения направляющих канатов размещены на стенке шахты в вертикальном направлении.
Когда подъемную емкость необходимо переместить вниз, поворотная рама в механическом устройстве предотвращения отклонения направляющего каната повернута в положение, в котором нижний захват находится в горизонтальном положении, и направляющий канат закреплен нижним захватом; на этой стадии верхний захват находится в наклонном положении, которое обеспечивает возможность пропуска через него направляющей рамы; когда направляющая рама проходит через механическое устройство предотвращения отклонения направляющего каната, она толкает нижний захват для отвода и постепенного отклонения вниз и, таким образом, вынуждает поворотную раму совершать поворот в положение, в котором верхний захват находится в горизонтальном положении, и направляющий канат оказывается закреплен верхним захватом.
Когда подъемную емкость необходимо переместить вверх, поворотная рама в механическом устройстве предотвращения отклонения направляющего каната повернута в положение, в котором верхний захват находится в горизонтальном положении, и направляющий канат закреплен верхним захватом; на этой стадии нижний захват находится в наклонном положении, которое обеспечивает возможность пропуска через него направляющей рамы; когда направляющая рама проходит через механическое устройство предотвращения отклонения направляющего каната, она толкает верхний захват для отвода и постепенного отклонения вверх и, таким образом, вынуждает поворотную раму совершать поворот в положение, в котором нижний захват находится в горизонтальном положении, и направляющий канат оказывается закреплен нижним захватом.
В способе предотвращения отклонения направляющего каната в соответствии с настоящим изобретением, кроме того, расстояние между двумя соседними группами механических устройств предотвращения отклонения направляющих канатов составляет 5-20 м.
Настоящее изобретение обладает следующими преимуществами.
(1) За счет использования механического устройства предотвращения отклонения направляющего каната в соответствии с настоящим изобретением и его корректного размещения на стенке шахты и вследствие того, что направляющая рама выполнена с возможностью плавного перемещения, средство захвата ограничивает часть степеней свободы направляющего каната, с тем чтобы предотвращать его отклонение, в результате чего улучшены устойчивость подъемной емкости при движении и ее безопасность.
(2) Механическое устройство предотвращения отклонения направляющего каната в соответствии с настоящим изобретением является самоприводной строго механической конструкцией и не нуждается в электроэнергии или гидравлическом приводе; таким образом, оно позволяет использовать меньше кабелей и занимает меньшее пространство в шахте.
(3) Средства захвата охватывают направляющий канат только наполовину; в результате этого обеспечивается возможность их одновременной установки в процессе строительства, иными словами, нет необходимости поднимать висячие подмости на землю для ремонта; таким образом, обеспечивается возможность сокращения времени строительства.
(4) Гидравлическое опорное средство реализует функцию амортизирования; таким образом, по сравнению с блоком, который имеет одну вилку и приводится в действие с помощью пружины, настоящее механическое устройство является более стабильным в средствах перехода, а ударная нагрузка на направляющий канат меньше.
(5) Механическое устройство предотвращения отклонения направляющего каната в соответствии с настоящим изобретением имеет простую конструкцию, просто в изготовлении и установке, имеет надежные рабочие характеристики и просто в разборке и повторной сборке.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
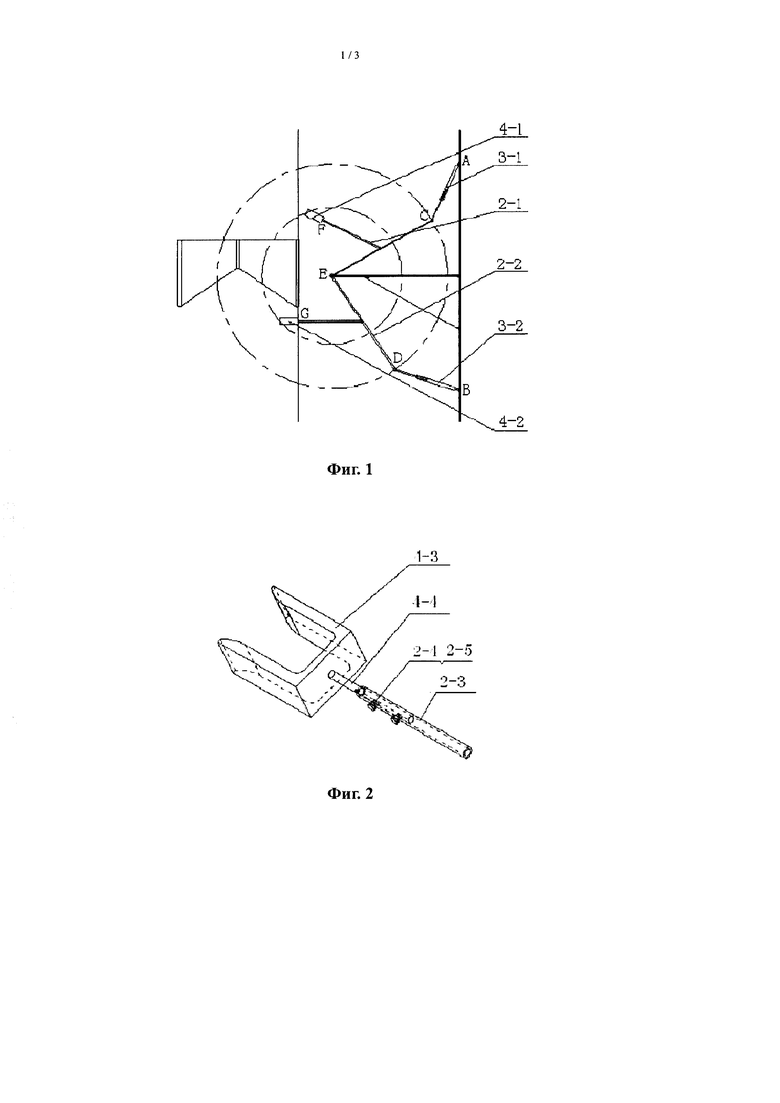
Фиг. 1 представляет собой структурную схему механического устройства предотвращения отклонения направляющего каната в соответствии с настоящим изобретением;
фиг. 2 представляет собой структурную схему соединения между поворотной рамой и захватами;
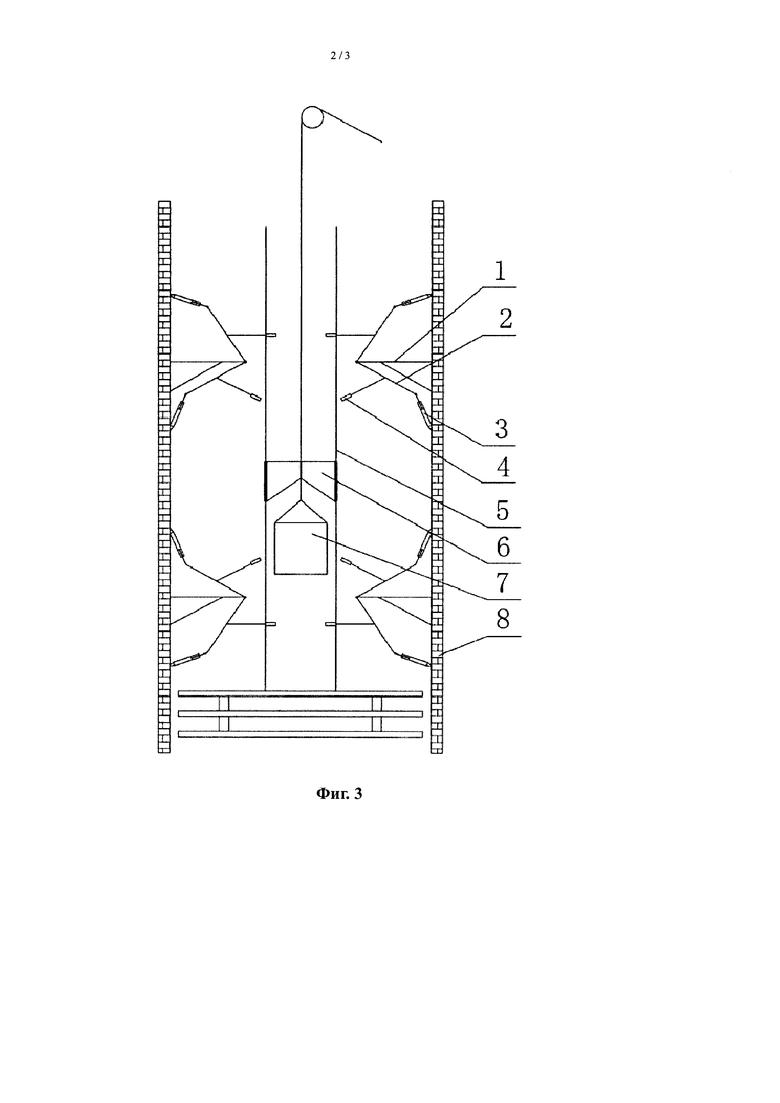
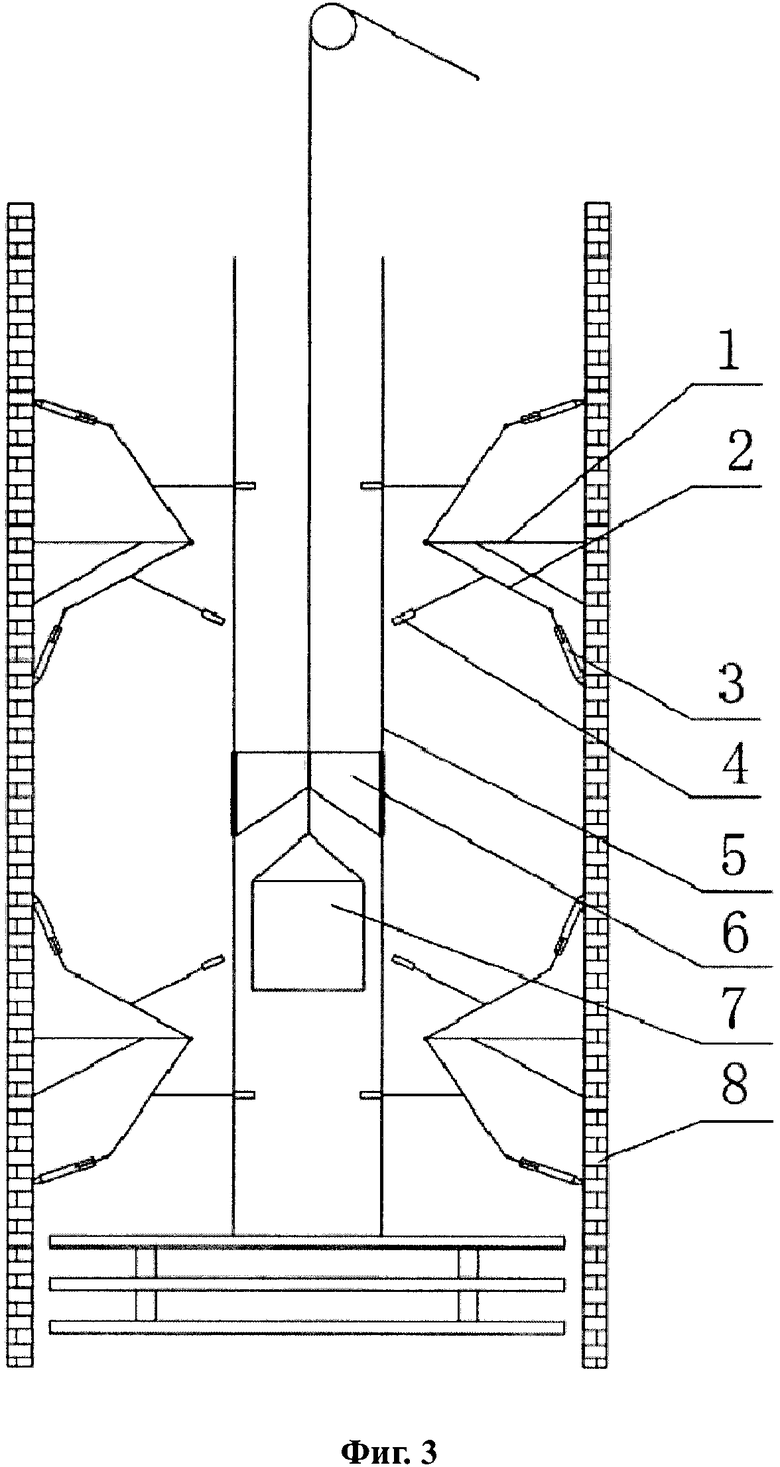
фиг. 3 представляет собой схему расположения механического устройства предотвращения отклонения направляющего каната в способе предотвращения отклонения направляющего каната по настоящему изобретению;
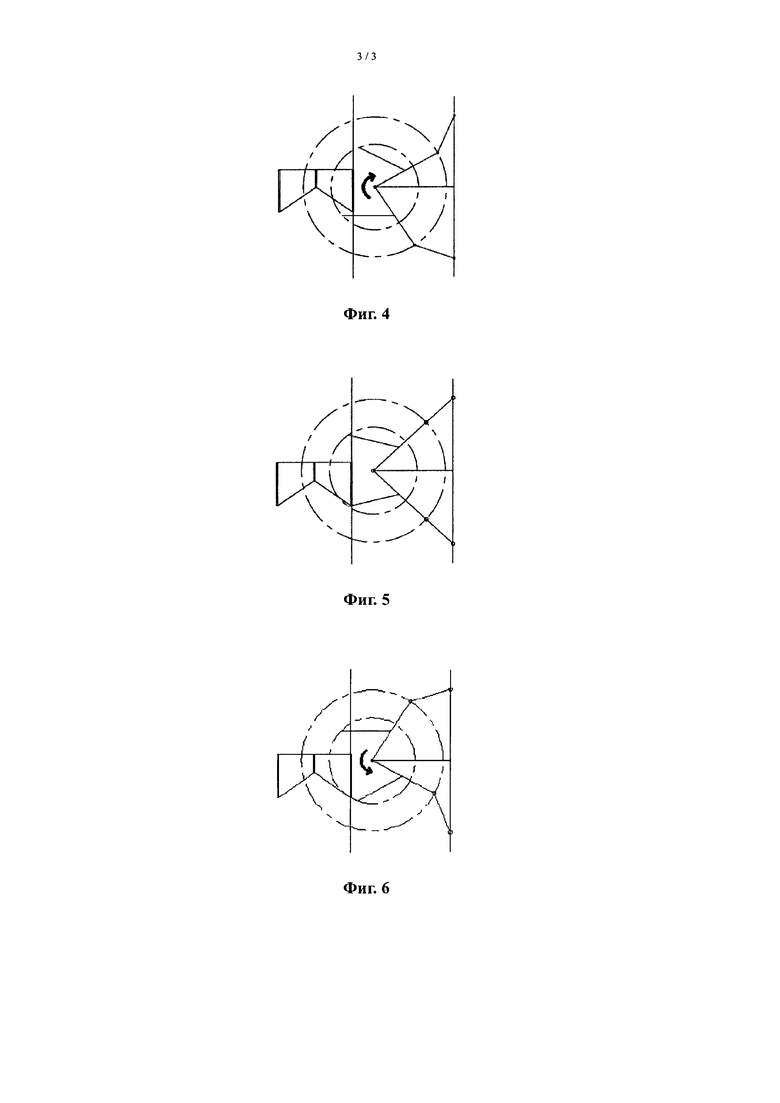
фиг. 4 представляет собой принципиальную схему, иллюстрирующую состояние, в котором момент сопротивления является отрицательным во время перемещения механического устройства предотвращения отклонения;
фиг. 5 представляет собой принципиальную схему, иллюстрирующую состояние, в котором момент сопротивления равен нулю во время перемещения механического устройства предотвращения отклонения;
фиг. 6 представляет собой принципиальную схему, иллюстрирующую состояние, в котором момент сопротивления является положительным во время перемещения механического устройства предотвращения отклонения.
Позиционные обозначения
1 - "Т"-образная монтажная опора,
2 - поворотная рама,
3 - гидравлическое опорное средство,
4 - средство захвата,
5 - направляющий канат,
6 - направляющая рама,
7 - подъемная емкость,
8 - стенка шахты;
2-1 - верхний "Y"-образный держатель,
2-2 - нижний "Y"-образный держатель,
2-3 - полая стальная деталь,
2-4 - крепежный болт,
2-5 - болтовое отверстие;
3-1 - верхний гидравлический опорный стержень,
3-2 - нижний гидравлический опорный стержень;
4-1 - верхний захват,
4-2 - нижний захват,
4-3 - "V'-образный захват,
4-4 - круглая стальная деталь.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Далее настоящее изобретение будет подробно описано со ссылкой на прилагаемые чертежи.
Как показано на фиг. 1 и 2, механическое устройство предотвращения отклонения направляющего каната в соответствии с настоящим изобретением содержит "Т"-образную монтажную опору 1, поворотную раму 2, гидравлическое опорное средство 3 и средство захвата 4.
"Т"-образная монтажная опора 1 содержит продольный опорный стержень и поперечный опорный стержень, при этом продольный опорный стержень закреплен на стенке 8 шахты, и один конец поперечного опорного стержня прикреплен к центральной части продольного опорного стержня.
Гидравлическое опорное средство 3 содержит верхний гидравлический опорный стержень 3-1 и нижний гидравлический опорный стержень 3-2, один конец верхнего гидравлического опорного стержня 3-1 шарнирно прикреплен к верхнему концу (конец А на чертежах) продольного опорного стержня, а один конец нижнего гидравлического опорного стержня 3-2 шарнирно прикреплен к нижнему концу (конец В на чертежах) продольного опорного стержня.
Поворотная рама 2 содержит верхний "Y"-образный держатель 2-1 и нижний "Y"-образный держатель 2-2, при этом верхний "Y"-образный держатель и нижний "Y"-образный держатель 2-2 выполнены в виде одной и той же конструкции.
Один конец (конец С на чертежах) верхнего "Y"-образного держателя 2-1 шарнирно прикреплен к другому концу верхнего гидравлического опорного стержня 3-1, один конец (конец D на чертежах) нижнего "Y"-образного держателя 2-2 шарнирно прикреплен к другому концу нижнего гидравлического опорного стержня 3-2, другой конец верхнего "Y"-образного держателя 2-1 прикреплен к другому концу нижнего "Y"-образного держателя 2-2 и шарнирно прикреплен к другому концу (конец Е на чертежах) поперечного опорного стержня; третий конец верхнего "Y"-образного держателя 2-1 и третий конец нижнего "Y"-образного держателя 2-2 выполнены с полой стальной деталью 2-3 соответственно, при этом полая стальная деталь 2-3 имеет болтовое отверстие 2-5, а крепежный болт 2-4 размещен в указанном болтовом отверстии 2-5.
Средство захвата 4 содержит верхний захват 4-1 и нижний захват 4-2, и верхний захват 4-1 и нижний захват 4-2 содержат "V"-образный захват 4-3 и круглую стальную деталь 4-4, при этом "V"-образный захват 4-3 оснащен канавкой, выполненной с
возможностью охватывания направляющего каната 5, один конец круглой стальной детали 4-4 прикреплен к "V"-образному захвату 4-3, а другой конец круглой стальной детали 4-4 проходит в трубу полой стальной детали 2-3 и прикреплен крепежным болтом 2-4, и тем самым верхний захват 4-1 и нижний захват 4-2 прикреплены к третьему концу верхнего "Y"-образного держателя 2-1 и к третьему концу нижнего "Y"-образного держателя 2-2 соответственно, так что поворотная рама 2 и средство захвата 4 соединены друг с другом.
Во время использования длина круглой стальной детали 4-4, проходящей в полую стальную трубу 2-3, может быть отрегулирована для регулировки длины выступания верхнего захвата 4-1 и нижнего захвата 4-2, с тем чтобы надежно обеспечивать работу направляющего каната 5.
Как показано на фиг. 4, когда поворотная рама 2 совершает поворот вокруг указанного другого конца поперечного опорного стержня в положение, в котором нижний захват 4-2 находится в горизонтальном положении, верхний захват 4-1 оказывается в положении наклона вверх. На этой стадии верхний гидравлический опорный стержень 3-1 и нижний гидравлический опорный стержень 3-2 максимально выступают; кроме того, поскольку гидравлическое опорное средство 3 создает постоянное устойчивое толкающее усилие, момент сопротивления относительно другого конца поперечного опорного стержня "Т"-образной монтажной опоры 1 является отрицательным (здесь, момент в направлении против часовой стрелки определен как положительный); в результате этого поворотная рама 2 не может совершать поворота, и механическое устройство предотвращения отклонения направляющего каната находится в устойчивом состоянии.
Как показано на фиг. 5, когда поворотная рама 2 совершает поворот вокруг указанного другого конца поперечного опорного стержня в положение, в котором верхний конец продольного опорного стержня, один конец верхнего "Y"-образного держателя 2-1 и другой конец "Y"-образного держателя 2-1 находятся на одной и той же линии, нижний конец продольного опорного стержня, один конец нижнего "Y"-образного держателя 2-2 и другой конец нижнего "Y"-образного держателя 2-2 также будут находиться на одной и той же линии. На этой стадии момент сопротивления гидравлического опорного средства 3 к другому концу поперечного опорного стержня "Т"-образной монтажной опоры 1 равен нулю.
Как показано на фиг. 6, когда поворотная рама 2 совершает поворот вокруг указанного другого конца поперечного опорного стержня в положение, в котором верхний захват 4-1 находится в горизонтальном положении, нижний захват 4-2 оказывается в положении наклона вверх.
На этой стадии верхний гидравлический опорный стержень 3-1 и нижний гидравлический опорный стержень 3-2 максимально выступают; кроме того, поскольку гидравлическое опорное средство 3 создает постоянное устойчивое толкающее усилие, момент сопротивления относительно другого конца поперечного опорного стержня "Т"-образной монтажной опоры 1 является положительным; в результате этого поворотная рама 2 не может совершать поворота, и механическое устройство предотвращения отклонения направляющего каната находится в устойчивом состоянии.
Как показано на фиг. 3, способ предотвращения отклонения направляющего каната в соответствии с настоящим изобретением характеризуется тем, что каждые два механические устройства предотвращения отклонения направляющих канатов размещены в группе, и по меньшей мере две группы механических устройств предотвращения отклонения направляющих канатов размещены на стенке 8 шахты в вертикальном направлении.
В этом варианте реализации изобретения используются две группы механических устройств предотвращения отклонения направляющих канатов, размещенные на нижней части (или средней части) направляющего каната 5, в которой боковая жесткость меньше; при этом расстояние между двумя группами механических устройств предотвращения отклонения направляющих канатов составляет 5-20 м.
Когда подъемную емкость 7 необходимо переместить вниз, поворотные рамы 2 двух групп механических устройств предотвращения отклонения направляющих канатов повернуты в положение, в котором нижние захваты 4-2 находятся в горизонтальном положении, и направляющие канаты 5 закреплены нижними захватами 4-2 двух групп механических устройств предотвращения отклонения направляющих канатов; на этой стадии верхние захваты 4-1 двух групп механических устройств предотвращения отклонения направляющих канатов находятся в наклонном положении, которое обеспечивает возможность пропуска через него направляющей рамы 6.
Когда направляющая рама 6 перемещается вниз и вступает в контакт с нижним захватом 4-2 первой группы механических устройств предотвращения отклонения направляющих канатов, направляющая рама 6 преодолевает момент сопротивления,
развиваемый гидравлическим опорным средством 3 первой группы механических устройств предотвращения отклонения направляющих канатов за счет силы тяжести и толкает нижний захват 4-2 первой группы механических устройств предотвращения отклонения направляющих канатов для отвода и постепенного отклонения вниз и, таким образом, вынуждает поворотную раму 2 первой группы механических устройств предотвращения отклонения направляющих канатов совершать поворот; когда направляющая рама 6 отделена от нижнего захвата 4-2 первой группы механических устройств предотвращения отклонения направляющих канатов, поворотная рама 2 первой группы механических устройств предотвращения отклонения направляющих канатов оказывается повернута в положение, в котором верхний захват 4-1 находится в горизонтальном положении, а направляющий канат 5 оказывается закреплен верхним захватом 4-1 первой группы механических устройств предотвращения отклонения направляющих канатов. В процессе этого направляющая рама 6 плавно перемещается вниз и проходит через первую группу механических устройств предотвращения отклонения направляющих канатов.
Когда направляющая рама 6 перемещается вниз в положение между первой группой механических устройств предотвращения отклонения направляющих канатов и второй группой механических устройств предотвращения отклонения направляющих канатов, направляющий канат 5 закреплен верхним захватом 4-1 первой группы механических устройств предотвращения отклонения направляющих канатов и нижний захват 4-2 второй группы механических устройств предотвращения отклонения направляющих канатов.
Когда направляющая рама 6 перемещается вниз и вступает в контакт с нижним захватом 4-2 второй группы механических устройств предотвращения отклонения направляющих канатов, направляющая рама 6 преодолевает момент сопротивления, развиваемый гидравлическим опорным средством 3 второй группы механических устройств предотвращения отклонения направляющих канатов посредством гравитации и будет толкать нижний захват 4-2 второй группы механических устройств предотвращения направляющих канатов для отвода и постепенного отклонения вниз и, таким образом, вынуждает поворотную раму 2 второй группы механических устройств предотвращения отклонения направляющих канатов совершать поворот; когда направляющая рама 6 отделена от нижнего захвата 4-2 второй группы механических устройств предотвращения отклонения направляющих канатов, поворотная рама 2 второй группы механических устройств предотвращения отклонения направляющих канатов оказывается повернута в положение, в котором верхний захват 4-1 находится в горизонтальном положении, а направляющий канат 5 оказывается закреплен верхним захватом 4-1 второй группы механических устройств предотвращения отклонения направляющих канатов. В процессе этого направляющая рама 6 плавно перемещается вниз и проходит через вторую группу механических устройств предотвращения отклонения направляющих канатов.
После того как направляющая рама 6 проходит через вторую группу механических устройств предотвращения отклонения направляющих канатов, направляющий канат 5 оказывается закреплен верхним захватом 4-1 двух групп механических устройств предотвращения отклонения направляющих канатов.
Подобным образом, когда подъемная емкость 7 перемещается вверх, поворотные рамы 2 двух групп механических устройств предотвращения отклонения направляющих канатов повернуты в положение, в котором верхние захваты 4-1 находятся в горизонтальном положении, а направляющий канат 5 закреплен верхним захватом 4-1 двух групп механических устройств предотвращения отклонения направляющих канатов; на этой стадии нижние захваты 4-1 двух групп механических устройств предотвращения отклонения направляющих канатов находятся в наклонном положении, которое обеспечивает возможность пропуска через него направляющей рамы 6.
Когда направляющая рама 6 движется вверх и вступает в контакт с верхним захватом 4-1 второй группы механических устройств предотвращения отклонения направляющих канатов, направляющая рама 6 преодолевает момент сопротивления, развиваемый гидравлическим опорным средством 3 второй группы механических устройств предотвращения отклонения направляющих канатов, за счет направленного вверх толкающего усилия, создаваемого подъемной емкостью 7, и толкает верхний захват 4-1 второй группы механических устройств предотвращения отклонения направляющих канатов для отвода и постепенного отклонения вверх и, таким образом, вынуждает поворотную раму 2 второй группы механических устройств предотвращения отклонения направляющих канатов совершать поворот; когда направляющая рама 6 отделена от верхнего захвата 4-1 второй группы механических устройств предотвращения отклонения направляющих канатов, поворотная рама 2 второй группы механических устройств предотвращения отклонения направляющих канатов оказывается повернута в положение, в котором нижний захват 4-2 находится в горизонтальном положении, а направляющий канат 5 оказывается закреплен нижним захватом 4-2 второй группы механических устройств предотвращения отклонения направляющих канатов. В процессе этого направляющая рама 6 плавно перемещается вверх и проходит через вторую группу механических устройств предотвращения отклонения направляющих канатов.
Когда направляющая рама 6 движется вверх в положение между второй группой механических устройств предотвращения отклонения направляющих канатов и первой группой механических устройств предотвращения отклонения направляющих канатов, направляющий канат 5 оказывается закреплен нижним захватом 4-2 второй группы механических устройств предотвращения отклонения направляющих канатов и верхним захватом 4-1 первой группы механических устройств предотвращения отклонения направляющих канатов.
Когда направляющая рама 6 движется вверх и вступает в контакт с верхним захватом 4-1 первой группы механических устройств предотвращения отклонения направляющих канатов, направляющая рама 6 преодолевает момент сопротивления, развиваемый гидравлическим опорным средством 3 первой группы механических устройств предотвращения отклонения направляющих канатов, за счет направленного вверх толкающего усилия, создаваемого подъемной емкостью 7, и толкает верхний захват 4-1 первой группы механических устройств предотвращения отклонения направляющих канатов для отвода и постепенного отклонения вверх и, таким образом, вынуждает поворотную раму 2 первой группы механических устройств предотвращения отклонения направляющих канатов совершать поворот; когда направляющая рама 6 отделена от верхнего захвата 4-2 первой группы механических устройств предотвращения отклонения направляющих канатов, поворотная рама 2 первой группы механических устройств предотвращения отклонения направляющих канатов оказывается повернута в положение, в котором нижний захват 4-1 находится в горизонтальном положении, и направляющий канат 5 оказывается закреплен нижним захватом 4-2 первой группы механических устройств предотвращения отклонения направляющих канатов. В процессе этого направляющая рама 6 плавно перемещается вверх и проходит через первую группу механических устройств предотвращения отклонения направляющих канатов.
После того как направляющая рама 6 проходит через первую группу механических устройств предотвращения отклонения направляющих канатов, направляющий канат 5 оказывается закреплен нижними захватами 4-2 двух групп механических устройств предотвращения отклонения направляющих канатов.
Настоящее изобретение было проиллюстрировано и описано со ссылкой на некоторые предпочтительные варианты осуществления, однако настоящее изобретение ими не ограничивается. Специалистам в данной области техники должно быть понятно, что могут быть сделаны различные изменения и модификации без отступления от сущности и объема настоящего изобретения. Все такие изменения и модификации должны рассматриваться как входящие в объем защиты по настоящему изобретению.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПОПОЛНЕНИЯ ЗАПАСОВ АВИАНОСЦА, ПРЕДНАЗНАЧЕННАЯ ДЛЯ ТРАНСПОРТИРОВКИ ГРУЗА С ИСПОЛЬЗОВАНИЕМ КОНТЕЙНЕРОВ И НЕФТЯНЫХ ТАНКОВ | 2012 |
|
RU2597357C2 |
| УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ ПРОВИСАНИЯ КАНАТА ЛИФТА | 2011 |
|
RU2543446C2 |
| Конвейерная линия и держатель для тушки домашней птицы, применяемый в этой линии | 2016 |
|
RU2639333C1 |
| УСТРОЙСТВО И СПОСОБ ОПРЕДЕЛЕНИЯ НАТЯЖЕНИЯ НА НАПРАВЛЯЮЩЕМ КАНАТЕ ВИСЯЧИХ ПОДМОСТЕЙ ПРИ СТРОИТЕЛЬСТВЕ ШАХТЫ | 2014 |
|
RU2611092C2 |
| СЖИМАЕМЫЙ СТОПОР ДЛЯ ИСПОЛЬЗОВАНИЯ НА ПОДЪЕМНОМ КРАНЕ И СОДЕРЖАЩИЙ ЕГО КРАН | 2010 |
|
RU2544255C2 |
| КОМПЕНСАЦИОННОЕ УСТРОЙСТВО ДЛЯ ПОДЪЕМНИКА | 2011 |
|
RU2554726C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ МОНТАЖА ЛИФТА | 1998 |
|
RU2196096C2 |
| ПОДДЕРЖИВАЮЩАЯ ГИДРАВЛИЧЕСКАЯ СТОЙКА | 2005 |
|
RU2381366C1 |
| ДОИЛЬНОЕ УСТРОЙСТВО | 2007 |
|
RU2447652C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ МОНТАЖА ЛИФТА | 1998 |
|
RU2194004C2 |
Механическое устройство и способ предотвращения отклонения направляющего каната применяются при строительстве в сверхглубоких вертикальных шахтах. Механическое устройство предотвращения отклонения направляющего каната содержит Т-образную монтажную опору, поворотную раму, гидравлическое опорное средство и средство захвата. Т-образная монтажная опора содержит вертикальный опорный стержень и горизонтальный опорный стержень. Гидравлическое опорное средство содержит верхний гидравлический опорный стержень и нижний гидравлический опорный стержень. Поворотная рама содержит верхнюю "Y"-образную раму и нижнюю "Y"-образную раму. Средство захвата содержит верхний захват и нижний захват. В способе предотвращения отклонения направляющего каната используются два механических устройства предотвращения отклонения направляющего каната в виде одной группы, с размещением по меньшей мере двух групп на стенке шахты в вертикальном направлении. При обеспечении плавного перемещения направляющей рамы часть степеней свободы направляющего каната ограничена средством захвата. Изобретения обеспечивают повышение устойчивости подъемных емкостей. 2 н. и 2 з.п. ф-лы, 6 ил.
1. Механическое устройство предотвращения отклонения направляющего каната для подвесной системы с параллельными гибкими кабелями, содержащее
T-образную монтажную опору (1), поворотную раму (2), гидравлический опорный стержень (3) и захват (4), при этом
T-образная монтажная опора (1) содержит продольный опорный стержень и поперечный опорный стержень, при этом продольный опорный стержень закреплен на стенке (8) шахты, и один конец поперечного опорного стержня прикреплен к центральной части продольного опорного стержня;
гидравлический опорный стержень (3) содержит верхний гидравлический опорный стержень (3-1) и нижний гидравлический опорный стержень (3-2),
один конец верхнего гидравлического опорного стержня (3-1) шарнирно прикреплен к верхнему концу продольного опорного стержня, и
один конец нижнего гидравлического опорного стержня (3-2) шарнирно прикреплен к нижнему концу продольного опорного стержня;
поворотная рама (2) содержит верхний Y-образный держатель (2-1) и нижний Y-образный держатель (2-2),
один конец верхнего Y-образного держателя (2-1) шарнирно прикреплен к другому концу верхнего гидравлического опорного стержня (3-1),
один конец нижнего Y-образного держателя (2-2) шарнирно прикреплен к другому концу нижнего гидравлического опорного стержня (3-2), и
другой конец верхнего Y-образного держателя (2-1) прикреплен к другому концу нижнего Y-образного держателя (2-2), и шарнирно прикреплен к другому концу поперечного опорного стержня;
захват (4) содержит верхний захват (4-1) и нижний захват (4-2), при этом верхний захват (4-1) прикреплен к третьему концу верхнего Y-образного держателя (2-1), а нижний захват (4-2) прикреплен к третьему концу нижнего Y-образного держателя (2-2);
когда поворотная рама (2) совершает поворот вокруг указанного другого конца поперечного опорного стержня в положение, в котором нижний захват (4-2) находится в горизонтальном положении, верхний захват (4-1) оказывается в положении наклона вверх;
когда поворотная рама (2) совершает поворот вокруг указанного другого конца поперечного опорного стержня в положение, в котором верхний захват (4-1) находится в горизонтальном положении, нижний захват (4-2) оказывается в положении наклона вниз.
2. Механическое устройство предотвращения отклонения направляющего каната для подвесной системы с параллельными гибкими кабелями по п. 1, в котором
верхний Y-образный держатель (2-1) и нижний Y-образный держатель (2-2) выполнены в одной и той же конструкции,
третий конец верхнего Y-образного держателя (2-1) и третий конец нижнего Y-образного держателя (2-2) выполнены с полой стальной деталью (2-3) соответственно,
при этом полая стальная деталь (2-3) имеет болтовое отверстие (2-5), и
крепежный болт (2-4) размещен в указанном болтовом отверстии;
верхний захват (4-1) и нижний захват (4-2) содержат V-образный захват (4-3) и круглую стальную деталь (4-4),
при этом V-образный захват (4-3) имеет зажимную канавку, выполненную с возможностью охватывания направляющего каната (5),
один конец круглой стальной детали (3-3) прикреплен к V-образному захвату (4-3), а другой конец круглой стальной детали (4-4) проходит в трубу полой стальной детали (2-3) и прикреплен крепежным болтом (2-4).
3. Способ предотвращения отклонения направляющего каната для подвесной системы с параллельными гибкими кабелями, в котором
каждые два механические устройства предотвращения отклонения направляющих канатов по п. 1 или 2 размещены в группе, и по меньшей мере две группы механических устройств предотвращения отклонения направляющих канатов размещены на стенке (8) шахты в вертикальном направлении;
когда подъемная емкость (7) перемещается вниз, поворотная рама (2) в механическом устройстве предотвращения отклонения направляющего каната повернута в положение, в котором нижний захват (4-2) находится в горизонтальном положении, и направляющий канат (5) закреплен нижним захватом (4-2);
на этой стадии верхний захват (4-1) находится в наклонном положении, которое обеспечивает возможность пропуска через него направляющей рамы;
когда направляющая рама (6) проходит через механическое устройство предотвращения отклонения направляющего каната, она толкает нижний захват (4-2) для отвода и постепенного отклонения вниз и, таким образом, вынуждает поворотную раму (2) совершать поворот в положение, в котором верхний захват (4-1) находится в горизонтальном положении, а направляющий канат (5) оказывается закреплен верхним захватом (4-1);
когда подъемную емкость (7) необходимо переместить вверх, поворотная рама (2) в механическом устройстве предотвращения отклонения направляющего каната повернута в положение, в котором верхний захват (4-1) находится в горизонтальном положении, и направляющий канат (5) закреплен верхним захватом (4-1);
на этой стадии нижний захват (4-2) находится в наклонном положении, которое обеспечивает возможность пропуска через него направляющей рамы;
когда направляющая рама (6) проходит через механическое устройство предотвращения отклонения направляющего каната, она толкает верхний захват (4-1) для отвода и постепенного отклонения вверх и, таким образом, вынуждает поворотную раму (2) совершать поворот в положение, в котором нижний захват (4-2) находится в горизонтальном положении, а направляющий канат (5) оказывается закреплен нижним захватом (4-2).
4. Способ предотвращения отклонения направляющего каната для подвесной системы с параллельными гибкими кабелями по п. 3, в котором
расстояние между двумя соседними группами механических устройств предотвращения отклонения направляющих канатов составляет 5-20 м.
| Стабилизатор канатных направляющих подъемника | 1981 |
|
SU965939A1 |
| Стабилизатор канатных направляющих подъемников | 1975 |
|
SU537922A1 |
| Подъемник | 1981 |
|
SU1013384A1 |
| СТРОИТЕЛЬНЫЙ ПОДЪЕМНИКоL.JФ?ЩП f5tfpi]P[>&Tf5R УПй wHl-s'-'i-S » 4i'^' | 1971 |
|
SU436017A1 |
| JPH09151059 A, 10.06.1997; | |||
| US 4601607 A1, 22.07.1986. | |||

