ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к системе и к способу оповещения пользователя об интересующей области в одном изображении из последовательности медицинских изображений пациента.
УРОВЕНЬ ТЕХНИКИ
В области техники медицинской визуализации обычно отображают последовательность медицинских изображений пациента. Например, компьютерная томография (КТ) может обеспечивать трехмерное воспроизведение строения человека или ткани. Для обеспечения рентгенолога возможностью навигации по трехмерному воспроизведению результаты трехмерного воспроизведения могут быть отображены в виде последовательности двумерных поперечных сечений трехмерной реконструкции, и рентгенологу может быть предоставлена возможность навигации по этой последовательности.
Конкретное изображение из последовательности медицинских изображений может содержать область, представляющую особый интерес для рентгенолога или иного пользователя. Например, цифровая томографическая реконструкция груди (DBT) может обеспечивать трехмерное воспроизведение груди пациента, и одно из поперечных сечений трехмерного воспроизведения может показать скопление микрокальцинозов, которое могут указывать на предраковое состояние пациента.
Известно оповещение пользователя об интересующей области в последовательности медицинских изображений пациента. Например, в публикации патентной заявки США № US 2010/0086188 описана система, облегчающая представление выбранных признаков в наборе изображений груди, представляющих собой воспроизведение и/или проекции, для медицинского работника. Этими признаками могут являться потенциальные кальцинозы, удовлетворяющие определенным критериям.
Месторасположение признаков получают на отдельном этапе компьютерной диагностики (CAD). Облегчение представления может содержать отображение выбранных изображений груди, которые содержат потенциальные кальцинозы, и выделение кальцинозов в изображениях яркостью или цветом. В альтернативном варианте потенциальные кальцинозы могут быть очерчены прямоугольником, указаны стрелкой или выделены цветом и/или изменением интенсивности изображения в окрестности потенциальных кальцинозов.
Проблема облегчения представления интересующей области согласно патентной заявке США № US 2010/0086188 состоит в том, что оно является недостаточно пригодным для оповещения пользователя об интересующей области в пределах одного изображения из последовательности медицинских изображений пациента.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Целесообразно иметь усовершенствованную систему или усовершенствованный способ оповещения пользователя об интересующей области внутри одного изображения из последовательности медицинских изображений пациента.
Для лучшего решения этой задачи в первом аспекте настоящего изобретения предложена система для оповещения пользователя об интересующей области в пределах интересующего изображения, причем интересующим изображением является одно из последовательности медицинских изображений пациента, а система выполнена с возможностью последовательного отображения последовательности медицинских изображений для предоставления пользователю возможности навигации по последовательности медицинских изображений, и эта система содержит устройство ввода для приема от пользователя команды навигации по последовательности для ввода в систему запроса на отображение изображений из последовательности медицинских изображений в виде части пиксельных данных, показываемых на дисплее, и генератор сигналов для выдачи пользователю сенсорного сигнала отдельно от пиксельных данных и в зависимости от разности между положением изображения из последовательности медицинских изображений, отображаемого в настоящий момент, в последовательности и положением интересующего изображения в последовательности.
Вышеописанная система позволяет пользователю относительно быстро просматривать относительно большое количество визуальной информации из последовательности медицинских изображений. По меньшей мере одно из изображений из последовательности, так называемое изображение, представляющее интерес, содержит интересующую область. Интересующая область представляет собой идентифицированный участок интересующего изображения. Местоположение интересующей области в последовательности и, следовательно, интересующего изображения является известным для системы. Система может получать сведения о местоположении, например, из метаданных, сопутствующих последовательности, или из отдельного средства обнаружения интересующей области, имеющегося в системе.
Система выполнена так, что позволяет пользователю выдавать запрос на вывод изображений из последовательности медицинских изображений для навигации по последовательности. Изображения показывают на дисплее в виде части всех пиксельных данных, отображаемых на дисплее. Система дополнительно содержит генератор сигналов, выполненный с возможностью выдачи сенсорного сигнала, отдельного от пиксельных данных, показываемых на дисплее, и, следовательно, не являющегося их частью. Генератор сигналов создает сенсорный сигнал в зависимости от разности местоположения в последовательности интересующего изображения и изображения, отображаемого системой в настоящий момент. Следовательно, система предоставляет пользователю возможность навигации по последовательности, информируя его, отдельно от пиксельных данных, показываемых на дисплее, об относительном положении изображения, содержащего интересующую область. Предпочтительно для обнаружения интересующей области в последовательности медицинских изображений может не требоваться оповещение пользователя о пиксельных данных, показываемых на дисплее.
Изобретение частично основано на понимании того, что оповещение пользователя об интересующей области в одном изображении из последовательности медицинских изображений пациента с использованием пиксельных данных, показываемых на дисплее, не является идеальным по следующим причинам. Пользователь может быть зрительно сосредоточен на последовательности медицинских изображений, и следовательно может пропустить пиксельные данные, связанные с оповещением. Оповещение, показываемое на дисплее, также добавляет дополнительную визуальную информацию к большому объему визуальной информации, уже показываемой на дисплее. Недостатком является то, что пользователь может быть сбит с толку, будучи относительно перегруженным визуальной информацией на дисплее.
Оповещение пользователя с использованием пиксельных данных, показываемых на дисплее, также может содержать выделение интересующей области относительно ее окружения. Однако если интересующая область является недостаточно визуально различимой, то пользователь может не заметить интересующую область. С другой стороны, если интересующая область является слишком сильно визуально различимой, то интересующая область может быть неправильно интерпретирована. Например, интересующая область может быть различена по увеличению интенсивности. Недостатком является то, что это может привести к неправильной интерпретации увеличения плотности ткани. Интересующая область также может быть выделена ограничивающим прямоугольником или аналогичным графическим объектом. Недостатком является то, что ограничивающий прямоугольник может заслонять соседние области, важные для интерпретации интересующей области.
Согласно настоящему изобретению сенсорный сигнал подают отдельно от пиксельных данных на дисплее для указания пользователю относительного положения интересующего изображения. Путем выдачи такого сенсорного сигнала пользователя оповещают вне зависимости от пиксельных данных, показываемых на дисплее. Следовательно, сенсорный сигнал не увеличивает объем визуальной информации, показываемой на дисплее. Предпочтительно можно избежать замешательства пользователя вследствие относительной перегрузки визуальной информацией, показываемой на дисплее. Кроме того, пользователь может быть оповещен без необходимости различения интересующей области системой и, таким образом, без потенциального увеличения риска неправильной интерпретации. Предпочтительно пользователь может определять местоположение интересующего изображения и интересующей области в нем относительно быстро и/или с небольшим усилием.
Возможно, но не обязательно, разность между местоположениями может указывать, является ли одно из последовательности медицинских изображений, отображаемое в настоящий момент, интересующим изображением.
Может оказаться желательной выдача сенсорного сигнала тогда, когда отображаемое в настоящий момент медицинское изображение является интересующим изображением. Это обеспечивает оповещение пользователя о том, что интересующая область находится в изображении, отображаемом в настоящий момент. Аналогичным образом, также может оказаться желательной выдача сенсорного сигнала тогда, когда отображаемое в настоящий момент медицинское изображение не является интересующим изображением. Это обеспечивает оповещение пользователя о том, что интересующая область находится в другом медицинском изображении. Предпочтительно пользователь может знать, нужно ли ему искать интересующую область в изображении, отображаемом в настоящий момент. Предпочтительно пользователь может определять местоположение интересующего изображения и интересующей области в нем относительно быстро и/или с небольшим усилием.
Разность между положениями может указывать расстояние или направление навигации от последовательности медицинских изображений, отображаемой в настоящий момент, до интересующего изображения (к интересующему изображению) в последовательности.
Как расстояние, так и направление навигации от медицинского изображения, отображаемого в настоящий момент, до интересующего изображения, являются важными для предоставления пользователю возможности найти интересующее изображение. Например, если пользователю предоставлены сведения о расстоянии, то он может осуществить навигацию в направлении уменьшения этого расстояния. Это позволяет пользователю относительно быстро найти интересующее изображение. К тому же, направление навигации к интересующему изображению позволяет пользователю определять, осуществляет ли он просмотр по направлению к интересующему изображению или от него. Следовательно, сенсорный сигнал подают пользователю в зависимости от расстояния или от направления навигации. Предпочтительно пользователь может определять местоположение интересующего изображения и интересующей области в нем относительно быстро и/или с небольшим усилием.
Сенсорным сигналом может являться невизуальный сенсорный сигнал.
Путем выдачи невизуального сенсорного сигнала пользователя оповещают с использованием иного вида ощущения. Следовательно, невизуальный сенсорный сигнал не увеличивает объем визуальной информации, представляемой последовательностью медицинских изображений. Предпочтительно пользователя можно легче оповестить об интересующей области, когда пользователь преимущественно получает визуальную информацию иным образом. К тому же, можно избежать замешательства пользователя из-за относительной перегрузки визуальной информацией. Предпочтительно пользователь может определять местоположение интересующего изображения и интересующей области в нем относительно быстро и/или с небольшим усилием.
Невизуальным сенсорным сигналом может являться слуховой и/или тактильный сигнал.
Слуховой сигнал и/или тактильный сигнал являются подходящими для оповещения пользователя, по существу, эти сигналы весьма существенно отличаются от визуальной информации, предоставляемой последовательностью медицинских изображений. Предпочтительно пользователь может быть особо готовым к получению оповещения посредством слухового сигнала в относительно тихой окружающей среде. Предпочтительно пользователь может быть особо готовым к получению оповещения посредством тактильного сигнала в относительно неподвижной окружающей среде.
Устройство ввода может содержать устройство тактильного ввода для приема от пользователя тактильной команды навигации по последовательности, и сенсорным сигналом может являться тактильный сигнал.
Путем выдачи сенсорного сигнала в виде тактильного сигнала пользователя оповещают об интересующей области с использованием того же самого вида ощущения, которое пользователь использует для подачи команды навигации по последовательности. Предпочтительно пользователь может быть уже относительно готовым к конкретному виду ощущения для того, чтобы правильно ввести желательные данные, и, следовательно, может быть относительно легко оповещен об интересующей области.
Устройство ввода может дополнительно содержать генератор сигналов для выдачи пользователю тактильного сигнала при приеме от пользователя тактильной команды навигации по последовательности.
Устройство ввода, которое также содержит генератор сигналов, является особо подходящим для оповещения пользователя с использованием тактильного сигнала, поскольку пользователь уже находится в физическом контакте с устройством тактильного ввода, входящим в состав устройства ввода, для подачи тактильной команды навигации по последовательности. Предпочтительно пользователю не нужно входить в иной физический контакт с системой для приема тактильного сигнала.
Устройством тактильного ввода может являться колесо прокрутки для приема от пользователя тактильной команды навигации по последовательности путем обнаружения поворота колеса прокрутки пользователем, и генератор сигналов может быть выполнен с возможностью выдачи пользователю тактильного сигнала путем регулирования сопротивления вращению, которое имеет колесо прокрутки.
Колесо прокрутки является подходящим для выдачи пользователю тактильного сигнала во время приема от пользователя тактильной команды навигации по последовательности.
Устройством тактильного ввода может являться сенсорная поверхность для приема от пользователя тактильной команды навигации по последовательности, работающая путем обнаружения прикосновения пользователя к сенсорной поверхности, и генератор сигналов может быть выполнен с возможностью выдачи пользователю тактильного сигнала путем регулирования вибрации сенсорной поверхности.
Сенсорная поверхность является подходящей для выдачи пользователю тактильного сигнала во время приема от пользователя тактильной команды навигации по последовательности.
Генератор сигналов может быть выполнен с возможностью выдачи сенсорного сигнала в зависимости от характеристики медицинского изображения в интересующей области или в зависимости от второго интересующего изображения из последовательности медицинских изображений, где это второе интересующее изображение содержит вторую интересующую область.
Сенсорный сигнал может передавать иную информацию, чем только информация об относительном положении интересующего изображения. В частности, может быть передана информация о характеристиках медицинского изображения или о наличии второй интересующей области во втором интересующем изображении, например, путем надлежащего выбора сенсорного сигнала. Предпочтительно для выдачи пользователю оповещения об относительном положении интересующего изображения и для передачи дополнительной информации может использоваться один сенсорный сигнал.
Характеристика медицинского изображения может относиться к значению плотности в интересующей области.
Вышеописанную систему может содержать рабочая станция.
Вышеописанную систему может содержать устройство формирования изображений.
Способ оповещения пользователя об интересующей области в интересующем изображении, где интересующим изображением является одно из последовательности медицинских изображений пациента, может содержать операцию конфигурирования системы для последовательного отображения последовательности медицинских изображений для предоставления пользователю возможности навигации по последовательности медицинских изображений, и может содержать этап, на котором:
принимают от пользователя команду навигации по последовательности для ввода в систему запроса на отображение изображений из последовательности медицинских изображений в качестве части пиксельных данных, показываемых на дисплее, и выдают пользователю сенсорный сигнал отдельно от пиксельных данных и в зависимости от разности между положением изображения из последовательности медицинских изображений, отображаемого в настоящий момент, в последовательности и положением интересующего изображения в последовательности.
Компьютерный программный продукт может содержать команды, вызывающие выполнение вышеизложенного способа процессорной системой.
Генератор сигналов может быть выполнен с возможностью выдачи пользователю сенсорного сигнала путем регулирования амплитуды, частоты или высоты тона несущего сенсорного сигнала.
Сенсорный сигнал может быть подан пользователю путем изменения характеристики существующего сенсорного сигнала, то есть несущего сигнала. Эта характеристика может включать в себя амплитуду, частоту и/или высоту тона. Например, сенсорный сигнал может быть подан пользователю путем увеличения амплитуды или частоты несущего сенсорного сигнала. Сенсорный сигнал также может быть подан путем последовательного изменения характеристики несущего сенсорного сигнала.
Это может обеспечивать возможность предоставления дополнительной информации посредством сенсорного сигнала. Например, амплитуда несущего сенсорного сигнала может быть увеличена, уменьшена, а затем снова увеличена для указания особо большой интересующей области, и может быть увеличена только лишь однократно для указания интересующей области обычного размера.
Система может дополнительно содержать средство обнаружения интересующей области для обнаружения интересующей области в последовательности медицинских изображений на основании некоторых критериев обнаружения интересующей области для предоставления сведений о положении интересующего изображения в последовательности медицинских изображений. Эти критерии могут быть введены пользователем как вводимые пользователем данные. В альтернативном варианте это средство обнаружения может быть приспособлено для использования заданных критериев, например критериев обнаружения узелка в легком или окклюзированного участка передней нисходящей ветви левой коронарной артерии (LAD). Обнаружение может быть основано, например, на сегментации изображения, например, на адаптации деформируемой модели объекта к увеличению изображения или к росту области с последующим анализом выросшей области. Специалисту в данной области техники известно множество способов реализации средства обнаружения интересующей области.
Таким образом, система способна обнаруживать то, какое именно из последовательности медицинских изображений содержит интересующую область. Следовательно, система знает, какое из медицинских изображений является интересующим изображением, поскольку интересующее изображение соответствует конкретному медицинскому изображению, которое содержит интересующую область. Предпочтительно для этой системы отсутствует необходимость в получении сведений о местоположении интересующей области из внешнего источника.
Специалистам в данной области техники понятно, что два или большее количество из вышеизложенных вариантов осуществления изобретения, вариантов реализации и/или объектов настоящего изобретения могут быть объединены любым образом, считающимся полезным.
На основании настоящего описания специалистом в данной области техники могут быть реализованы модификации и измененные варианты устройства получения изображений, рабочей станции, способа и/или компьютерного программного продукта, соответствующие описанным модификациям и измененным вариантам системы.
Специалисту в данной области техники понятно, что способ может быть применен к данным о многомерных изображениях, например двумерных (2-D), трехмерных (3-D) или четырехмерных (4-D) изображениях, полученных различными способами сбора данных, такими как, например, стандартная рентгенография, компьютерная томография (КТ), получение изображений методом ядерного магнитного резонанса (ЯМР), ультразвуковая диагностика (УЗ), позитронная эмиссионная томография (ПЭТ), однофотонная эмиссионная компьютерная томография (ОЭКТ) и ядерная медицина (ЯМ), но эти примеры не являются ограничивающим признаком.
Изобретение сформулировано в независимых пунктах формулы изобретения. Предпочтительные варианты осуществления изобретения сформулированы в зависимых пунктах формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Эти и другие аспекты настоящего изобретения станут очевидными из приведенного ниже описания вариантов осуществления изобретения и будут объяснены со ссылкой на них. На чертежах изображено следующее:
на Фиг. 1 показана система для оповещения пользователя об интересующей области в интересующем изображении.
на Фиг. 2 показано первое из последовательности отображаемых медицинских изображений.
на Фиг. 3 показано второе из последовательности отображаемых медицинских изображений, причем второе изображение находится ближе к интересующему изображению из последовательности, чем первое изображение.
на Фиг. 4 показано третье из последовательности отображаемых медицинских изображений, причем третье изображение является интересующим изображением и содержит интересующую область.
на Фиг. 5 показано устройство ввода, содержащее колесо прокрутки.
на Фиг. 6 показано устройство ввода, содержащее сенсорную поверхность.
на Фиг. 7 показан способ оповещения пользователя об интересующей области в интересующем изображении.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
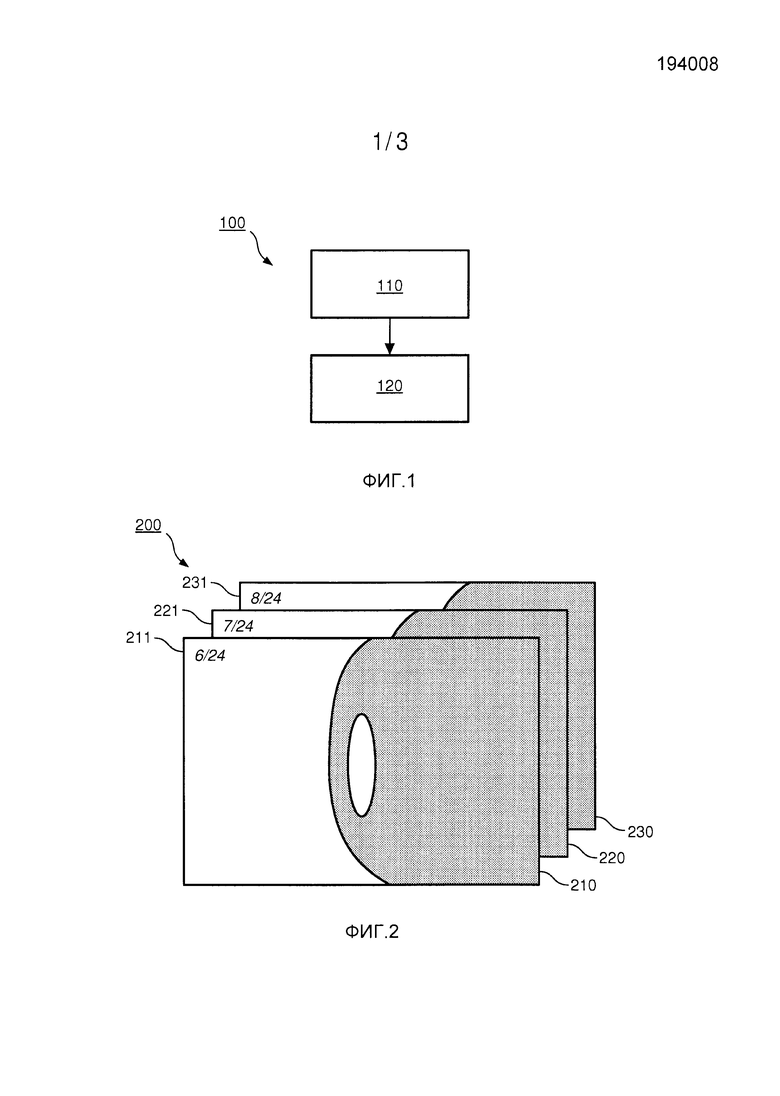
На Фиг. 1 показана система 100 для оповещения пользователя об интересующей области в интересующем изображении, причем интересующее изображение является частью последовательности медицинских изображений пациента. Система 100 содержит устройство 110 ввода для приема от пользователя команды навигации по последовательности для ввода в систему запроса на отображение изображений из последовательности медицинских изображений. Система 100 дополнительно содержит генератор 120 сигналов для выдачи пользователю сенсорного сигнала в зависимости от разности между положением изображения из последовательности медицинских изображений, отображаемого в настоящий момент, в последовательности и положением интересующего изображения в последовательности. Таким образом, система 100 обеспечивает для пользователя обратную связь, сообщая об относительном положении интересующего изображения в последовательности медицинских изображений.
Устройством 110 ввода может являться известное пользовательское устройство ввода, такое как, например, клавиатура, манипулятор типа «мышь» или сенсорный экран. В альтернативном варианте устройством 110 ввода может являться электронное устройство ввода данных для приема команды навигации по последовательности в виде электронных данных из пользовательского устройства ввода, соединенного с системой 100. Кроме того, генератором 120 сигналов может являться генератор физических сигналов, такой как, например, громкоговоритель или тактильное сигнальное устройство, генерирующие вибрацию или электрические поля. В альтернативном варианте генератором 120 сигналов может являться генератор электронных сигналов для выдачи электронного сигнала в генератор физических сигналов. Затем генератор физических сигналов может осуществлять преобразование электронного сигнала в свой соответствующий физический сигнал. Следовательно, устройство 110 ввода и/или генератор 120 сигналов могут быть по меньшей мере частично реализованы в виде программного обеспечения, выполняемого в процессоре. В альтернативном варианте устройство 110 ввода и/или генератор 120 сигналов могут быть по меньшей мере частично реализованы аппаратными средствами.
Показанный на Фиг. 1 генератор 120 сигналов соединен с устройством 110 ввода. Это может быть сделано для выдачи сенсорного сигнала в прямой зависимости от поступившей от пользователя команды навигации по последовательности, например для выдачи сенсорного сигнала во время подачи пользователем команды навигации по последовательности. Однако в системе 100 может отсутствовать необходимость в соединении генератора 120 сигналов с устройством 110 ввода, поскольку может не требоваться выдача сенсорного сигнала в прямой зависимости от команды навигации по последовательности. Однако, генератор 120 сигналов может обычно подавать сенсорный сигнал в косвенной зависимости от команды навигации по последовательности, поскольку сенсорный сигнал подают в зависимости от положения изображения, отображаемого в настоящий момент, и пользователь может определять изображение, отображаемое в настоящий момент, с использованием команды навигации по последовательности.
Система 100 выполнена с возможностью последовательного отображения последовательности медицинских изображений для предоставления пользователю возможности навигации по последовательности медицинских изображений. Для этого система 100 может дополнительно содержать (не показаны): процессор, средство хранения информации или коммуникационный порт. Процессор может быть выполнен с возможностью выполнения команд, являющихся частью программы вывода медицинских изображений на экран дисплея. Программа вывода медицинских изображений на экран дисплея может содержать по меньшей мере часть устройства 110 ввода и/или генератора 120 сигналов. Средство хранения информации может содержать оперативное запоминающее устройство (ОЗУ), постоянное запоминающее устройство (ПЗУ), накопитель на жестких дисках, съемные носители, такие как, например, компакт-диск (CD) и универсальный цифровой диск (DVD). Средство хранения информации может использоваться для хранения компьютерных команд и/или для хранения данных о медицинских изображениях. Коммуникационный порт может использоваться для связи с другой компьютерной системой, например с сервером. Коммуникационный порт может быть выполнен с возможностью соединения с сетью, например с локальной сетью, с глобальной сетью и/или с сетью Интернет. Через сеть может осуществляться доступ к другой компьютерной системе, например, для извлечения данных о медицинских изображениях.
Хотя это и не показано на Фиг. 1, система 100 может дополнительно содержать дисплей для выведения на его экран изображения из последовательности медицинских изображений. Дисплеем может являться любой подходящий дисплей, такой как, например, компьютерный монитор или телевизор. В альтернативном варианте система 100 может содержать выход на дисплей для вывода медицинского изображения на дисплей, не являющийся частью системы 100. Выходом на дисплей может являться выход на компьютерный видеомонитор.
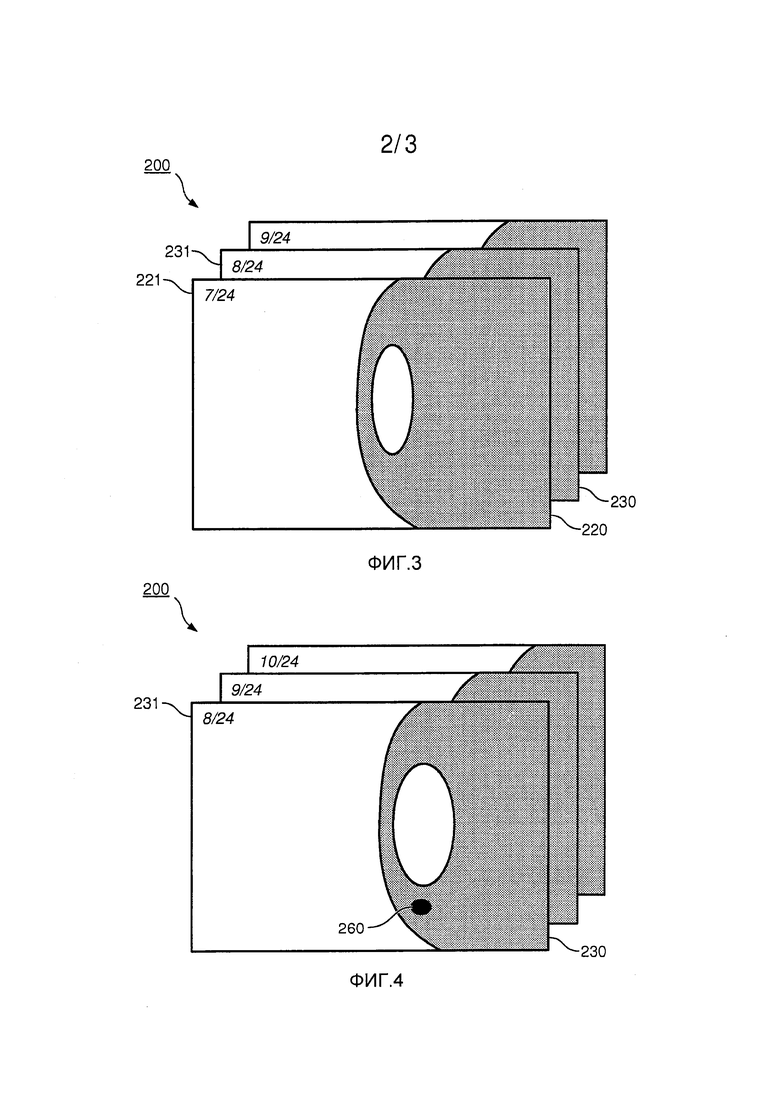
На Фиг. 2-4 показаны последовательные этапы возможного функционирования системы 100, и, следовательно, они могут отражать содержимое, отображаемое в средстве визуального отображения в системе 100 во время ее работы. На Фиг. 2 отображено первое изображение 210 из последовательности 200 медицинских изображений, то есть первое изображение 210. Первое изображение 210 показано как изображение поверх стопки изображений, образующее представление части последовательности 200. Таким образом, на Фиг. 2 также приведен частичный вид второго 220 и третьего 230 элементов из последовательности 200, то есть второго изображения 220 и третьего изображения 230, позади первого изображения 210. Само собой разумеется, что система 200 также может отображать последовательность 200 медицинских изображений любым иным подходящим способом. Например, может оказаться желательным одновременно показывать только одно изображение, то есть изображение, отображаемое в настоящий момент. Это может позволить пользователю сосредоточиться на одном изображении. В альтернативном варианте последовательность 200 медицинских изображений может быть представлена способом, аналогичным просмотру диафильма, что позволяет пользователю просматривать каждое изображение путем прокрутки диафильма, или способом объемной визуализации, в котором первое изображение является частично полупрозрачным для того, чтобы частично показать второе изображение и, возможно, дальнейшие изображения.
Первое изображение 210 имеет определенное положение в последовательности 200. Этим положением может являться номер изображения, если последовательность 200 содержит ограниченное количество медицинских изображений. Положение может быть показано пользователю, например, путем показа текста 211, описывающего положение, как показано на Фиг. 2 или путем показа полосы прокрутки, которая указывает текущее положение в пределах интервала, отображающего всю последовательность 200. Поскольку первым изображением 210 является изображение, отображаемое в настоящий момент, то текст 211, описывающий положение, отражает положение, отображаемое в настоящий момент, в последовательности 200. Однако информация о положении также может отсутствовать в отображаемом изображении. На Фиг. 2 также показан текст 221, описывающий положение второго изображения 220, и текст 231, описывающий положение третьего изображения 230.
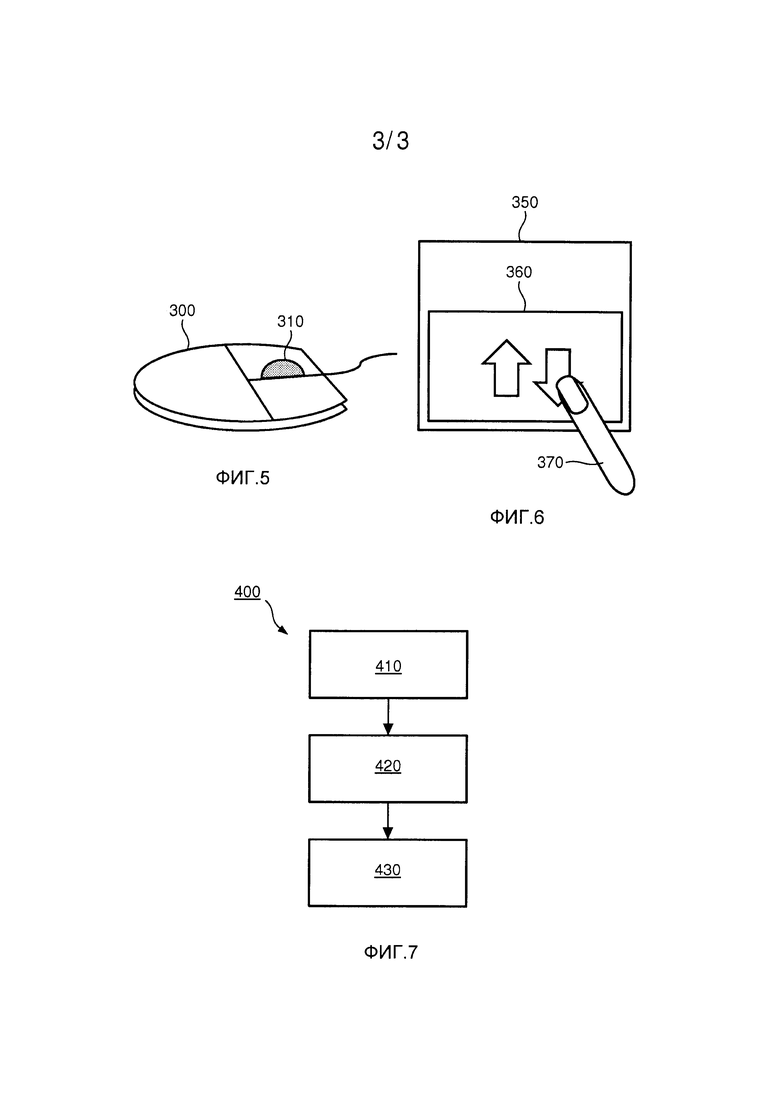
На Фиг. 3 показан результат подачи пользователем команды навигации по последовательности. Система 100 ответила на команду навигации по последовательности путем отображения второго изображения 220. Это может быть результатом того, что пользователем выдана команда «следующее» или «вперед» для навигации по последовательности. На Фиг. 4 показано, что интересующим изображением является следующее изображение в последовательности, то есть третье изображение 230, и, следовательно, оно содержит интересующую область 260. Следовательно, система 100 может быть устроена так, что уже выдает сенсорный сигнал, который указывает, что отображаемое в настоящий момент изображение 220 находится вблизи интересующего изображения 230. Таким образом, пользователь может быть оповещен о близком присутствии интересующей области в последовательности 200.
Система 100 может определять, что интересующее изображение 230 находится близко к отображаемому в настоящий момент изображению 220, путем сравнения положений между обоими изображениями в последовательности 200. Операция сравнения положений может содержать вычисление разности между положениями. Система 100 знает положение интересующего изображения 230 в последовательности, поскольку система знает положение интересующей области 260. Система 100 может получать сведения о положении, например метаданные, сопутствующие последовательности 200, из внешнего источника. Такие метаданные могут содержать сведения о положении в пространстве и номер изображения. Номер изображения может идентифицировать, какое именно изображение из последовательности медицинских изображений содержит интересующую область. Следовательно, операция сравнения положений может содержать вычисление разности номеров изображений. В альтернативном варианте система 100 может получать сведения о положении из внутреннего источника, например из средства обнаружения интересующей области, которое является частью системы 100 для обнаружения интересующей области и интересующего изображения, содержащего интересующую область.
Система 100 также может выдавать сенсорный сигнал, который указывает направление навигации от изображения 220, отображаемого в настоящий момент, к интересующему изображению 230 в последовательности 200. Следовательно, система 100 может обеспечить сенсорный сигнал, указывающий пользователю, что он может дать команду «следующее» или «вперед» вместо, например, команды «предыдущее» или «назад». На Фиг. 4 показан результат подачи пользователем еще одной команды «следующее» или «вперед», когда на отображаемом в настоящий момент изображении 230 показана интересующая область 260.
Система 100 также может подавать сенсорный сигнал для указания расстояния до интересующего изображения 230. Для этого сенсорный сигнал может быть обеспечен несущим сенсорным сигналом, имеющим особую характеристику. Несущим сигналом может являться, например, звуковой сигнал или вибрация конкретной амплитуды или частоты. Когда дана команда «следующее» или «вперед», вызывающая вывод на экран второго изображения 220, несущий сигнал может быть отрегулирован так, что указывает пользователю то, что он переместился ближе к интересующему изображению 230. Например, могут быть увеличены или уменьшены амплитуда и/или частота несущего сигнала. Когда дана еще одна команда навигации по последовательности, представляющая собой команду «следующее» или «вперед», и выведено третье изображение, то есть интересующее изображение 230, то несущий сигнал может быть дополнительно отрегулирован так, что указывает пользователю то, что отображаемое в настоящий момент изображение является интересующим изображением 230. Дополнительным регулированием может являться увеличение или уменьшение амплитуды и/или частоты несущего сигнала.
Понятно, что вместо регулирования амплитуды, частоты или высоты тона несущего сенсорного сигнала, может подан новый сенсорный сигнал, имеющий отрегулированную амплитуду, частоту или высоту тона по сравнению с предыдущим сенсорным сигналом. Понятно то, что восприятие пользователем сигнала может быть аналогичным или тем же самым, что и при регулировании амплитуды, частоты или высоты тона несущего сенсорного сигнала.
Система 100 может быть устроена так, что подает максимальную или минимальную амплитуду несущего сенсорного сигнала тогда, когда отображаемое в настоящий момент изображение является интересующим изображением 230. Система 100 также может быть устроена так, что подает максимальную или минимальную частоту упомянутого несущего сигнала тогда, когда отображаемое в настоящий момент изображение является интересующим изображением 230. Следовательно, пользователю подают сенсорный сигнал, указывающий расстояние от отображаемого в настоящий момент изображения до интересующего изображения 230. Аналогичным образом, сенсорный сигнал также может указывать направление навигации. Например, система 100 может быть устроена так, что подает сенсорный сигнал, имеющий различную амплитуду или частоту для каждого из направлений навигации: направления к интересующему изображению 230 или направления от него.
Последовательность 200 медицинских изображений показана на Фиг. 2-4 как явная последовательность медицинских изображений, то есть как стопка двумерных медицинских изображений. Однако последовательность 200 может быть неявно сформирована направлением навигации по трехмерному медицинскому изображению. Например, система 100 может быть устроена так, что позволяет пользователю осуществлять навигацию по трехмерному изображению, где отображаемое в настоящий момент изображение представляет собой поперечное сечение трехмерного изображения вдоль конкретной плоскости, и последовательностью 200 является неявно сформированной поперечными сечениями трехмерного изображения, которые являются параллельными конкретной плоскости. Во время работы эта конкретная плоскость может быть повернута пользователем. Следовательно, после поворота последовательностью 200 медицинских изображений может являться новая последовательность медицинских изображений, неявно сформированных новыми поперечными сечениями, параллельными повернутой плоскости. В этом случае разность положений может относиться к геометрическому расстоянию в трехмерном изображении между поперечным сечением, отображаемым в настоящий момент, и интересующим поперечным сечением.
На Фиг. 5 показан компьютерный манипулятор 300 типа «мышь», содержащий колесо 310 прокрутки. Колесо 310 прокрутки представляет собой механическое вращаемое устройство, которое позволяет пользователю осуществлять навигацию по последовательности 200. Например, вращение колеса 310 прокрутки вперед может давать команду «следующее» или «вперед», а вращение колеса 310 прокрутки назад может давать команду «предыдущее» или «назад». Следовательно, пользователь может подавать в систему 100 тактильную команду навигации по последовательности при приведении колеса 310 прокрутки в действие пользователем путем прикосновения к колесу 310 прокрутки и путем его вращения. Компьютерный манипулятор 300 типа «мышь» также может быть устроен для выдачи пользователю сенсорного сигнала с использованием колеса 310 прокрутки. Таким образом, колесо 310 прокрутки может функционировать в качестве генератора 120 сигналов или являться вариантом его осуществления. Сенсорным сигналом может являться сопротивление вращению, с которым сталкивается пользователь при приведении в действие, то есть при вращении колеса 310 прокрутки. Таким образом, пользователю подают сенсорный сигнал в момент подачи пользователем команды навигации по последовательности с использованием колеса 310 прокрутки.
Сопротивление вращению может указывать направление навигации. Например, сопротивление вращению может являться более низким в направлении, ориентированном к интересующему изображению 230 в последовательности 200. Например, на этапе работы, изображенном на Фиг. 3, сопротивление вращению при вращении колеса прокрутки 310 назад может быть более высоким, чем сопротивление вращению при вращении колеса 310 прокрутки вперед. Следовательно, система может быть выполнена с возможностью регулирования сопротивления вращению таким образом, чтобы пользователь был способен находить интересующее изображение 230 путем прокрутки, то есть путем вращения в направлении с самым низким сопротивлением вращению. В альтернативном варианте сопротивление вращению может также быть указывающим расстояние. В альтернативном варианте компьютерный манипулятор типа «мышь» 300 или колесо 310 прокрутки могут создавать в качестве сенсорного сигнала вибрацию, указывающую расстояние или направление навигации.
На Фиг. 6 показано устройство 350 ввода, содержащее сенсорную поверхность 360. Сенсорной поверхностью 360 может являться верхняя поверхность дисплея с сенсорным экраном. Устройство 350 ввода может являться вариантом осуществления устройства 110 ввода. Сенсорная поверхность 360 может обеспечивать для пользователя возможность подачи команды навигации по последовательности путем прикосновения к сенсорной поверхности. Участок сенсорной поверхности может быть связан с командой «следующее» или «вперед», а другой участок может быть связан с командой «предыдущее» или «назад». Пользователь может подавать соответствующие команды путем прикосновения пальцем 370 к соответствующим участкам сенсорной поверхности 360.
Устройство 350 ввода может быть выполнено с возможностью выдачи сенсорного сигнала с использованием сенсорной поверхности 360. Таким образом, сенсорная поверхность 360 может функционировать в качестве генератора 120 сигналов или являться вариантом его осуществления. Сенсорным сигналом может являться вибрация, с которой сталкивается пользователь при приведении в действие, то есть при прикосновении к сенсорной поверхности 360. Таким образом, сенсорный сигнал может быть подан в момент подачи пользователем команды навигации по последовательности. Вибрация может указывать направление навигации или расстояние. Например, на этапе работы, изображенном на Фиг. 3, вибрация, с которой сталкивается пользователь при нажатии на участок, соответствующий команде «назад», может быть более сильной, чем вибрация, с которой сталкивается пользователь при нажатии на участок, соответствующий команде «вперед». В альтернативном варианте вибрация может быть выбрана так, что для пользователя, вне независимости от того, к какому участку он прикоснулся, обеспечивают обратную связь, указывающую направление навигации и/или расстояние до интересующего изображения. В альтернативном варианте сенсорная поверхность 360 может создавать сенсорный сигнал любым иным подходящим средством, например путем генерации электрического поля.
Хотя это и не показано на чертежах, устройство 110 ввода может быть устроено для приема команды навигации по последовательности в виде речевой команды. Следовательно, устройство 110 ввода может содержать микрофон или может быть соединено с ним. К тому же, генератор 120 сигналов может быть выполнен с возможностью выдачи сенсорного сигнала в виде синтезированного или записанного речевого сигнала. Следовательно, генератор 120 сигналов может содержать громкоговоритель и/или синтезатор речи или может быть соединен с ними.
Хотя это и не показано на чертежах, генератор 120 сигналов может содержать источник света, который подает визуальный сенсорный сигнал пользователю отдельно от дисплея. Например, генератор сигналов может содержать светодиод (LED), расположенный рядом с дисплеем для выдачи пользователю сенсорного сигнала в виде светового сигнала. В конкретном примере светодиод расположен над или под дисплеем для выдачи пользователю отдельного, но все же легко видимого визуального сигнала. Генератор сигналов может подавать световой сигнал, например, путем изменения интенсивности или цвета светодиода, или путем модуляции несущего светового сигнала от светодиода.
Как правило, интересующая область может указывать конкретный медицинский аспект в интересующем изображении. Медицинским аспектом может являться патологический аспект, такой как, например, местоположение кальциноза или поражения. Медицинский аспект также может относиться к конкретному органу, и, таким образом, интересующая область может указывать местоположение, например, сердца или печени. В частности интересующая область может быть указана или отмечена маркером компьютерной диагностики (CAD), например, для оповещения пользователя о наличии кальциноза или поражения. Маркер CAD может быть снабжен метаданными, сопутствующими последовательности. Последовательность также может содержать множество интересующих областей. Следовательно, система может быть устроена так, что оповещает пользователя о каждой из множества интересующих областей и, следовательно, подает сенсорный сигнал в зависимости от каждого из изображений, содержащих интересующую область.
Сенсорным сигналом может являться любой сенсорный сигнал, который может быть подан отдельно от отображаемых пиксельных данных. В частности, сенсорными данными может являться невизуальный сенсорный сигнал. Невизуальным сенсорным сигналом может являться слуховой, тактильный или любой иной подходящий невизуальный сенсорный сигнал. Слуховым сенсорным сигналом может являться тон, модуляция тона, синтезированная речь и т.д. Тактильным сенсорным сигналом может являться вибрация, сопротивление, давление или электронное возбуждение, приложенное, например, к пальцу или к руке пользователя. Однако понятно, что также могут использоваться любые иные подходящие невизуальные сенсорные сигналы.
Сенсорный сигнал может указывать двоичную информацию, например, присутствует ли интересующая область в изображении, отображаемом в настоящий момент. Однако сенсорный сигнал также может указывать недвоичную информацию, например расстояние до интересующего изображения или медицинскую характеристику интересующей области в этом изображении. Эта медицинская характеристика может относиться, например, к плотности интересующей области. Сенсорный сигнал может также содержать код. Например, если сенсорным сигналом является слуховой сигнал, то длительность слухового сигнала может использоваться для указания размера или типа интересующей области. В конкретном примере короткий сигнал может указывать наличие одиночного кальциноза, а длинный сигнал может указывать наличие группы кальцинозов. Аналогичным образом, буква азбуки Морзе может использоваться для указания медицинских аномалий различных типов. Понятно, что, в общем, может использоваться любой способ кодирования, известный в области техники, относящейся к теории информации.
Последовательность медицинских изображений также может содержать интересующий объект или объем, и несколько изображений из последовательности медицинских изображений могут содержать соответствующее количество интересующих областей для указания соответствующих участков интересующего объекта или объема. Сенсорный сигнал может указывать медицинскую характеристику конкретной интересующей области в изображении, отображаемом в настоящий момент. Медицинской характеристикой может являться, например, плотность или масса. Например, сопротивление вращению, которое имеет колесо прокрутки, показанное на Фиг. 5, может быть отрегулировано в зависимости от плотности интересующего участка объекта или объема, показываемого в настоящий момент. Следовательно, система 100 может сигнализировать пользователю о плотности интересующего участка объекта или объема, показываемого в настоящий момент, посредством колеса прокрутки.
Последовательность медицинских изображений может быть получена из собранных данных цифровой томографической реконструкции груди (DBT). Здесь грудь пациента сжимают параллельно плоскому детектору и облучают в ограниченном диапазоне углов. Трехмерная реконструкция груди может быть получена с использованием алгоритмов томографической реконструкции с ограниченным углом обзора. Вследствие ограниченного диапазона углов воспроизводимое трехмерное изображение допускает анизотропную разрешающую способность, то есть пространственная разрешающая способность в плоскостях, параллельных детектору, является значительно более высокой, чем в плоскостях, ортогональных детектору. Следовательно, воспроизводимые данные показаны как воспроизведение сечения с возможностью просмотра этих данных путем прокрутки вдоль плоскостей, параллельных детектору. В стандартной маммографии рентгенолог может установить диагноз на основании одного или двух двумерных изображений. При диагностике по последовательности изображений, полученных методом DBT, рентгенологу может потребоваться вывести на экран последовательность изображений, полученных методом DBT, и, следовательно, может потребоваться больше времени. Кроме того, в большом объеме данных из последовательности изображений, полученных методом DBT, рентгенологом могут быть пропущены структуры очень малого размера, такие как, например, скопления микрокальцинозов. Следовательно, система 100 может быть направлена на решение проблемы, связанной с необходимостью затрачивания большего количества времени и/или с пропуском структур очень малого размера, или может решить эту проблему.
На Фиг. 7 показан способ 400 оповещения пользователя об интересующей области в интересующем изображении, причем интересующее изображение является одним из последовательности медицинских изображений пациента, содержащий этап, на котором: конфигурируют 410 систему для последовательного отображения последовательности медицинских изображений для предоставления пользователю возможности осуществлять навигацию по последовательности медицинских изображений, и содержащий этапы, на которых: принимают 420 от пользователя команду навигации по последовательности для ввода в систему запроса на отображение изображений из последовательности медицинских изображений в виде части пиксельных данных, показываемых на дисплее, и подают 430 пользователю сенсорный сигнал отдельно от пиксельных данных и в зависимости от разности между положением изображения из последовательности медицинских изображений, отображаемого в настоящий момент, и положением интересующего изображения в этой последовательности.
Следует понимать, что изобретение также применимо для компьютерных программ, в частности, для компьютерных программ на носителе информации, приспособленном для практической реализации изобретения. Программа может быть представлена в виде исходного кода, объектного кода, промежуточного кода и объектного кода, например, в частично скомпилированном виде или в любом ином виде, пригодном для использования при реализации способа согласно настоящему изобретению. Также следует понимать, что такая программа может иметь множество различных архитектурных схем. Например, программный код, реализующий функциональные возможности способа или системы согласно настоящему изобретению, может быть подразделен на одну или на большее количество подпрограмм. Множество различных способов распределения функций между этими подпрограммами являются очевидными для квалифицированного специалиста в данной области техники. Подпрограммы могут храниться вместе в одном исполняемом файле для формирования автономной программы. Такой исполняемый файл может содержать исполняемые компьютером команды, например команды процессора и/или команды интерпретатора (например, команды интерпретатора языка Java). В альтернативном варианте одна или большее количество подпрограмм, или все они могут храниться по меньшей мере в одном внешнем библиотечном файле и могут быть связаны с основной программой либо статически, либо динамически, например, во время выполнения. Основная программа содержит по меньшей мере один вызов по меньшей мере одной из подпрограмм. Подпрограммы также могут содержать функциональные вызовы друг друга. Вариант осуществления изобретения, относящийся к компьютерному программному продукту, содержит исполняемые компьютером команды, соответствующие каждой операции обработки из по меньшей мере одного из описанных здесь способов. Эти команды могут быть подразделены на подпрограммы и/или могут храниться в одном или более файлов, которые могут быть связаны статически или динамически. Другой вариант осуществления изобретения, относящийся к компьютерному программному продукту, содержит исполняемые компьютером команды, соответствующие каждому средству по меньшей мере из одной из систем и/или из одного из описанных здесь продуктов. Эти команды могут быть подразделены на подпрограммы и/или могут храниться в одном или в большем количестве файлов, которые могут быть связаны статически или динамически.
Носителем компьютерной программы может являться любой объект или любое устройство, способное являться носителем программы. Например, носитель может включать в себя запоминающую среду, например постоянное запоминающее устройство (ПЗУ), которым является, например, постоянное запоминающее устройство на компакт-диске (CD-ROM) или полупроводниковое ПЗУ, или магнитный носитель записи, например накопитель на жестких дисках. Кроме того, носителем может являться передаваемый носитель, например электрический или оптический сигнал, который может быть передан по электрическому или по оптическому кабелю, по радио или иными средствами. Когда программа реализована в таком сигнале, носитель может быть создан таким кабелем или иным устройством или средством. В альтернативном варианте носителем может являться интегральная схема, в которую встроена программа, причем эта интегральная схема приспособлена для выполнения соответствующего способа или подлежит использованию при его выполнении.
Следует отметить, что описанные выше варианты осуществления изобретения иллюстрируют, а не ограничивают настоящее изобретение, и что специалистам в данной области техники очевидно множество альтернативных вариантов осуществления изобретения, не выходящих за пределы объема прилагаемой формулы изобретения. В формуле изобретения любые условные обозначения, помещенные в круглые скобки, не следует истолковывать как ограничение объема пункта формулы изобретения. Использование глагола «содержит» и производных от него не исключает наличия иных элементов или операций кроме приведенных в пункте формулы изобретения. Признак единственного числа, относящийся к элементу, не исключает наличия множества таких элементов. Изобретение может быть реализовано аппаратными средствами, содержащими несколько отдельных элементов, и посредством соответственно запрограммированного компьютера. В пункте формулы изобретения, относящемся к устройству, в котором перечислено несколько средств, эти несколько средств могут быть реализованы одним и тем же аппаратным элементом. Сам факт того, что определенные признаки перечислены в различных зависимых пунктах формулы изобретения, не означает того, что не может быть с выгодой использована комбинация этих признаков.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗВУКОВЫЕ РАСШИРЕНИЯ ДЛЯ МЕДИЦИНСКИХ СИСТЕМ | 2014 |
|
RU2675453C2 |
| ПРОКРУТКА ИЗОБРАЖЕНИЯ ВИРТУАЛЬНОГО РАБОЧЕГО СТОЛА | 2009 |
|
RU2491609C2 |
| ДЕФИБРИЛЛЯТОР-МОНИТОР С ПОЛЬЗОВАТЕЛЬСКИМ ИНТЕРФЕЙСОМ НА ОСНОВЕ СЕНСОРНОГО ЭКРАНА ДЛЯ ПРОСМОТРА ЭКГ И ТЕРАПИИ | 2014 |
|
RU2681492C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ТАКТИЛЬНОЙ ОТДАЧЕЙ ИНСТРУМЕНТА ВВОДА ДЛЯ ТЕРМИНАЛА МОБИЛЬНОЙ СВЯЗИ | 2013 |
|
RU2669087C2 |
| ПОЛЬЗОВАТЕЛЬСКОЕ ОКОНЕЧНОЕ УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ИМ | 2013 |
|
RU2666279C2 |
| Система визуализации для медицинских целей | 2022 |
|
RU2794341C1 |
| ТЕРМИНАЛ, СПОСОБ УПРАВЛЕНИЯ ИМ И ЗАПИСЫВАЕМЫЙ НОСИТЕЛЬ | 2009 |
|
RU2419832C2 |
| СИСТЕМА УЛЬТРАЗВУКОВОЙ ВИЗУАЛИЗАЦИИ ДЛЯ РАБОТЫ С ПРЕОБЛАДАЮЩИМ ИСПОЛЬЗОВАНИЕМ БОЛЬШОГО ПАЛЬЦА | 2019 |
|
RU2800403C2 |
| СИСТЕМА НАВИГАЦИИ ДЛЯ МЕДИЦИНСКИХ ИЗОБРАЖЕНИЙ | 2017 |
|
RU2736878C2 |
| ПАНОРАМИРОВАНИЕ КОНТЕНТА С ИСПОЛЬЗОВАНИЕМ ОПЕРАЦИИ ПЕРЕТАСКИВАНИЯ | 2009 |
|
RU2523169C2 |
Изобретение относится к области оповещения пользователя об интересующей области в одном изображении из последовательности медицинских изображений пациента. Техническим результатом является обеспечение обнаружения отклонений в интересующей области в медицинских изображениях. Система содержит: устройство ввода для приема от пользователя команды навигации по последовательности для ввода в систему запроса на отображение изображений из последовательности медицинских изображений в виде части пиксельных данных, показываемых на дисплее, и генератор сигналов для выдачи пользователю невизуального сенсорного сигнала отдельно от пиксельных данных, который изменяется в зависимости от разности между положением изображения из последовательности медицинских изображений, отображаемого в настоящий момент, в последовательности и положением интересующего изображения в последовательности. 5 н. и 10 з.п. ф-лы, 7 ил. 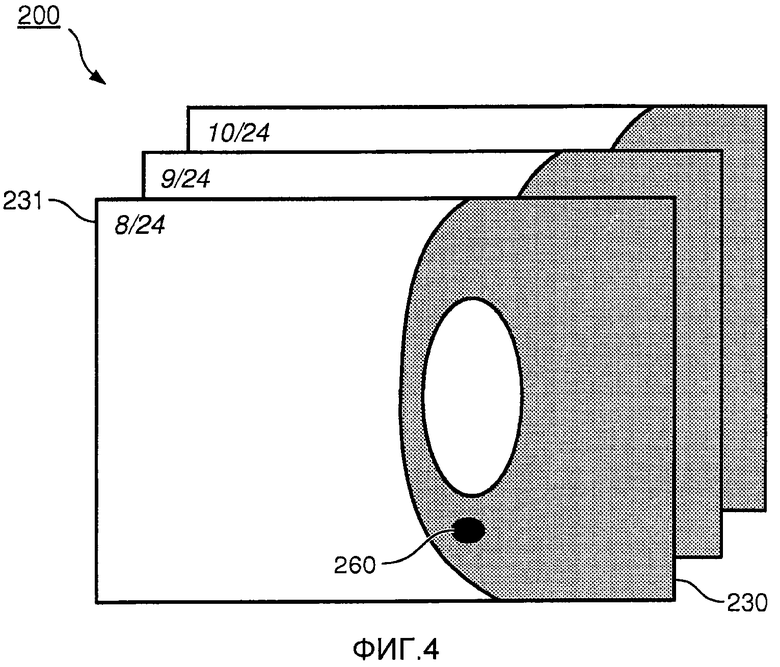
1. Система (100) для оповещения пользователя об интересующей области (260) в интересующем изображении (230), причем интересующим изображением является одно из последовательности (200) медицинских изображений пациента, причем система выполнена с возможностью последовательного отображения последовательности медицинских изображений для предоставления пользователю возможности навигации по последовательности медицинских изображений, и при этом система содержит:
устройство (110) ввода для приема от пользователя команды навигации по последовательности для ввода в систему запроса на отображение изображений из последовательности медицинских изображений в виде части пиксельных данных, показываемых на дисплее; и
генератор (120) сигналов для выдачи пользователю невизуального сенсорного сигнала отдельно от пиксельных данных, который изменяется в зависимости от разности между положением (211, 221, 231) изображения (210, 220, 230) из последовательности медицинских изображений, отображаемого в настоящий момент, в последовательности и положением (231) интересующего изображения (230) в последовательности.
2. Система по п. 1, в которой разность между положениями (211, 221, 231) указывает, является ли изображение (210, 220, 230) из последовательности (200) медицинских изображений, отображаемое в настоящий момент, интересующим изображением (230).
3. Система по п. 1, в которой разность между положениями (211, 221, 231) указывает на расстояние или направление навигации от изображения (210, 220, 230) из последовательности (200) медицинских изображений, отображаемого в настоящий момент, до интересующего изображения (230) в последовательности.
4. Система по п. 1, в которой сенсорным сигналом является невизуальный сенсорный сигнал, и в которой невизуальным сенсорным сигналом является слуховой и/или тактильный сигнал.
5. Система по п. 1, дополнительно содержащая средство обнаружения интересующей области для обнаружения интересующей области в последовательности медицинских изображений на основании критериев обнаружения упомянутой интересующей области, для предоставления сведений о положении интересующего изображения в последовательности медицинских изображений.
6. Система по п. 1, в которой устройство (110) ввода содержит устройство (310, 360) тактильного ввода для приема от пользователя тактильной команды навигации по последовательности и в которой сенсорным сигналом является тактильный сигнал.
7. Система по п. 6, в которой устройство (110) ввода дополнительно содержит генератор (120) сигналов для выдачи пользователю тактильного сигнала во время приема от пользователя тактильной команды навигации по последовательности.
8. Система по п. 7, в которой устройством тактильного ввода является колесо (310) прокрутки для приема от пользователя тактильной команды навигации по последовательности путем обнаружения вращения пользователем колеса прокрутки и в которой генератор (120) сигналов выполнен с возможностью выдачи пользователю тактильного сигнала путем регулирования сопротивления вращению, которое имеет колесо прокрутки.
9. Система по п. 7, в которой устройством тактильного ввода является сенсорная поверхность (360) для приема от пользователя тактильной команды навигации по последовательности путем обнаружения прикосновения пользователя к сенсорной поверхности и в которой генератор (120) сигналов выполнен с возможностью выдачи пользователю тактильного сигнала путем регулирования вибрации сенсорной поверхности.
10. Система по п. 1, в которой генератор сигналов (120) выполнен с возможностью выдачи сенсорного сигнала в зависимости от характеристики медицинского изображения в интересующей области (260) или в зависимости от второго интересующего изображения из последовательности медицинских изображений, причем второе интересующее изображение содержит вторую интересующую область.
11. Система по п. 10, в которой характеристика медицинского изображения относится к величине плотности интересующей области (260).
12. Рабочая станция, содержащая систему по п. 1.
13. Устройство формирования изображений, содержащее систему по п. 1.
14. Способ (400) оповещения пользователя об интересующей области (260) в интересующем изображении (230), причем интересующим изображением является одно из последовательности (200) медицинских изображений пациента, а способ содержит этап, на котором конфигурируют (410) систему (100) для последовательного отображения последовательности медицинских изображений для предоставления пользователю возможности навигации по последовательности медицинских изображений, и при этом способ содержит этапы, на которых:
принимают (420) от пользователя команду навигации по последовательности для ввода в систему запроса на отображение изображений из последовательности медицинских изображений в качестве части пиксельных данных, показываемых на дисплее; и
выдают (430) пользователю невизуальный сенсорный сигнал отдельно от пиксельных данных, который изменяется в зависимости от разности между положением (211, 221, 231) изображения (210, 220, 230) из последовательности медицинских изображений, отображаемого в настоящий момент, в последовательности и положением (231) интересующего изображения (230) в последовательности.
15. Машиночитаемый носитель, на котором сохранен компьютерный программный продукт, содержащий команды, побуждающие процессорную систему выполнять способ по п. 14.
| US20090087067 A1, 02.04.2009 | |||
| US20080317386 A1, 25.12.2008 | |||
| US20100023857 A1, 28.01.2010 | |||
| US6128006, 03.10.2000 | |||
| СПОСОБ ПОЛУЧЕНИЯ ТОМОГРАФИЧЕСКОГО ИЗОБРАЖЕНИЯ МЕТОДОМ МАГНИТНОЙ ИНДУКЦИОННОЙ ТОМОГРАФИИ | 1996 |
|
RU2129406C1 |

