Изобретение относится к авиации и космонавтике. Известны летательные аппараты типа «Бурана» или дисковидные с морским и наземным базированием («Аврокар», «Астра», НЛО) (Квасников Л.А. и др. Теория и расчет энергосиловых установок космических летательных аппаратов. М.: Изд. МАИ, 2001 г., 479 с., REN-TV.RU) или турбореактивные самолеты (Акимов В.М. и др. Теория и расчет воздушно-реактивных двигателей. М.: «Машиностроение», 1987 г. 568 с.). Их недостаток в невозможности очень больших ускорений из-за одномерности и/или величины вектора тяги, в большом расходе топлива, в невозможности старта с любых площадок, а также в большой и длительной перегрузке пилотов при ускорениях.
Известен легкий каркасный двигатель с высоким коэффициентом полезного действия (КПД) и большим вращательным кинетическим моментом благодаря большому плечу момента вращения (патент №147818 RU, 2014 г.). Он в сочетании с планетарным редуктором (WO 2012/148307 А2 от 01.11.2012) может использоваться в летательном аппарате с двухмерным ускорителем, что ранее не рассматривалось.
Задача изобретения в осуществлении больших ускорений с повышенным вектором тяги и с кратковременными допустимыми перегрузками пилотов, в экономии топлива, в возможности старта с любых площадок.
1. Задача решается тем, что устройство, содержащее корпус с отверстием, двигатель, дополнительно снабжено желобом с двумя массивными реактивными двигателями M1, М2 на концах, сопряженным в центре с валом и планетарным редуктором, сопряженным со вторым желобом с двумя массивными реактивными двигателями на концах через механизм сцепления; вал сопряжен через второй механизм сцепления с капсулой, имеющей возможность смещения нормально к оси вращения, жестко сопряженной с корпусом и через подшипник с валом.
2. Летательный аппарат по п. 1, отличающийся тем, что дополнительно снабжен двумя камерами с отверстиями около 45°-90°, расположенными вдоль периметра в задней части камер.
3. Летательный аппарат по п. 1, отличающийся тем, что дополнительно снабжен камерой с отверстием около 45°-90°, расположенной вдоль периметра задней части камеры.
4. Летательный аппарат по п. 1, отличающийся тем, что дополнительно снабжен двигателями и отверстием около 45°-90°, расположенными в передней верхней части боковой поверхности замкнутой камеры, разделенной внутри вне объема двигателей поверхностью на верхнюю и нижнюю части, в нижней задней части камеры расположено отверстие около 45°-90°.
5. Летательный аппарат по любому из пп. 2-4, отличающийся тем, что выполнен с возможностью крепления к фюзеляжу самолета под его центром масс и использования в качестве двигателя и/или стабилизатора планирования самолета без работы реактивных двигателей.
6. Летательный аппарат по любому из пп. 2-4, отличающийся тем, что выполнен с импульсным и периодическим режимом работы реактивных двигателей с частотой их вращения.
7. Летательный аппарат по п. 1, отличающийся тем, что снабжен вторым поршневым двигателем.
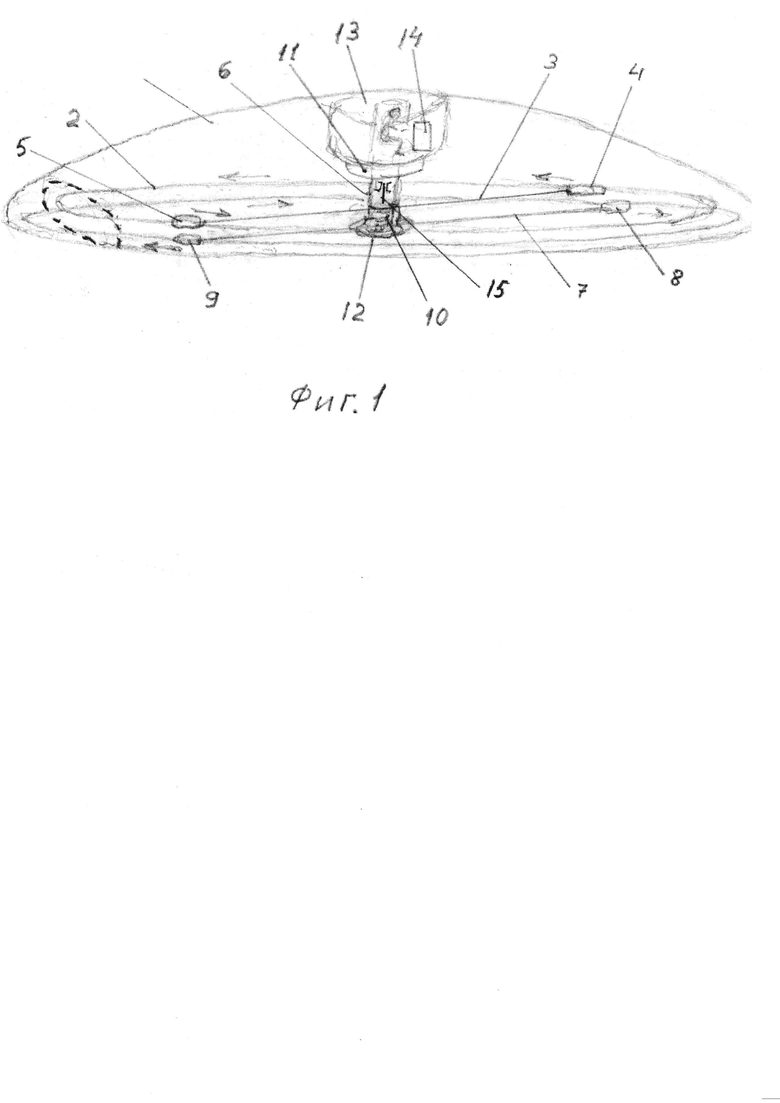
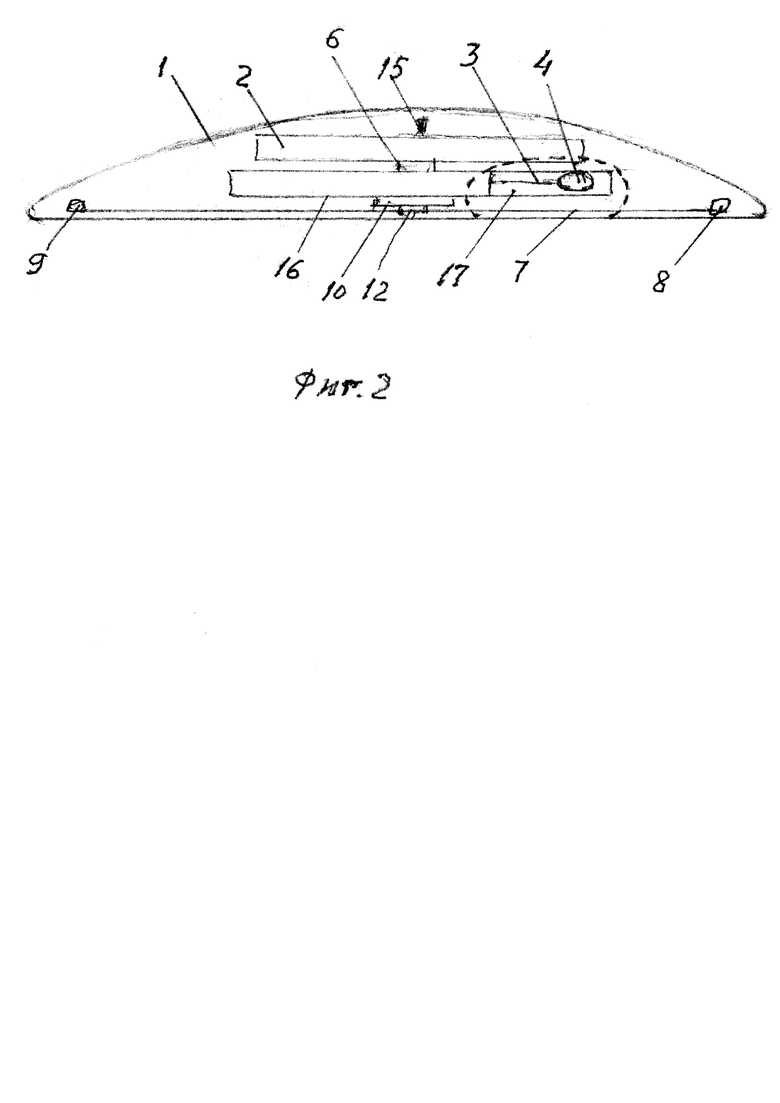
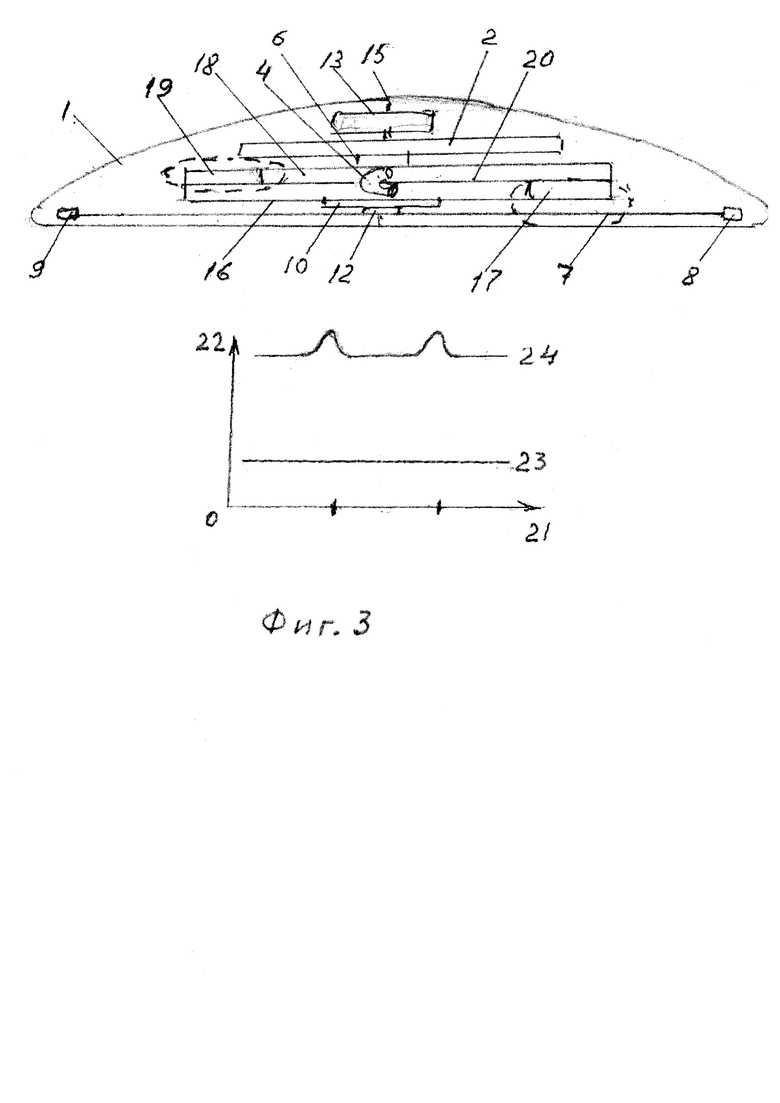
На фиг. 1, 2, 3 показаны устройства соответственно по п. 1, 3, 4, где 1 - корпус, 2 - двигатель, 3 - желоб, 4 - масса M1, 5 - масса М2, 6 - вал, 7 - второй желоб, 8 - масса М3, 9 - масса М4, 10 - планетарный редуктор, 11 - механизм сцепления, 12 - второй механизм сцепления, 13 - капсула, 14 - блок управления перемещением масс, 15 - ось, 16 - камера с отверстием 17, 18 - верхняя часть камеры с отверстием 19, 20 - подвижная поверхность, сопряженная с турбореактивным двигателем и разделяющая камеру на верхнюю и нижнюю части, 21, 22 - координаты периода вращения и величины тяги, 23, 24 - графики величины тяги реактивного двигателя без вращения и с его вращением. Стрелками указаны направления вращения. Пунктиром обозначено отверстие в корпусе 1 (на фиг. 2, фиг. 3 изображен беспилотный вариант летательного аппарата).
Корпус 1 имеет дисковидную форму из-за размещения в нем двух вращающихся желобов 3, 7 и двигателя 2 для генерации ускорений и имеет профиль крыла, чтобы при наличии атмосферы около Земли во время движения и центробежных ускорений, при больших скоростях обеспечивать действие подъемной силы крыла.
Двигатель 2 служит для получения кинетической энергии вращения, преобразуемой в кинетическую энергию поступательного движения при смещении центра масс с оси вращения вала 6.
Желоб 3 предназначен для передачи момента количества движения массам 4 и 5, а также для перераспределения масс в момент отстыковки М2 и последующего увеличения массы на месте М2 для смещения центра масс на ось вращения перед последующим увеличением кинетической энергии вращения.
Второй желоб 7 с массами 8, 9 и планетарным редуктором 10, меняющим направление вращения и величину кинетического момента, обеспечивают сохранение суммарного момента количества движения при изменениях кинетической энергии вращения, что необходимо для устойчивости летательного аппарата.
Механизмы сцепления 11 и 12 служат соответственно для плавного изменения скоростей вращения второго желоба 7 и капсулы 13 с пилотом или космонавтом.
Блок управления перемещением масс 14 нужен при выборе направления полета и величины ускорений в моменты подготовки и отстыковки массы М2 для смещений центра масс и возвращения его на ось вращения вала 6, а также для смещения отверстия, показанного пунктиром.
Ось 15 жестко сопряжена с корпусом 1 и через подшипник с валом 6.
Камера 16 служит соплом в форме изменяемой части тора двух или одного реактивных двигателей (на месте масс M1 и/или М2) с отверстием 17.
Камера 18 в форме изменяемой части тора двух или одного реактивных двигателей (с массами M1 и/или М2) с отверстием 19 в передней части корпуса 1, где у него отверстие, предназначена для забора воздуха и повышения давления в камерах сгорания турбореактивных двигателей по п. 4.
Поверхность 20 разделяет пространства забора воздуха и сопла у турбореактивных двигателей по п. 4.
Второй поршневой двигатель может использоваться вместо планетарного редуктора 10 и механизма сцепления 11.
Летательный аппарат по п. 1 функционирует следующим образом. После включения двигателя 2 и реактивных двигателей M1 и М2 полет осуществлялся за счет вращаемых вперед соплами реактивных двигателей M1 и М2. По окончании работы M1, М2 выполняется условие: М1=М2>>(остальной массы летательного аппарата). Центр масс расположен на оси вращения. Перед предполагаемой отстыковкой М2 капсула с человеком перемещается в новый центр масс, какой будет совпадать с осью вращения после отстыковки, и человек не испытает перегрузок при отстыковке массивного двигателя М2. Например, центр масс смещается на расстояние порядка 25 м от оси вращения с w=8,7 Гц, что приводит к приращению линейной скорости аппарата порядка 1,5 км/сек. За счет подъемной силы профиля крыла аппарат набирает высоту, но движение замедляется из-за сопротивления воздуха. Параллельно происходит с использованием блока управления перемещением масс 14 перемещение массы (М1)/2 с нового центра масс и вращения около M1 вдоль желоба 3 до места расположения раннее М2 с одновременным радиальным смешением и капсулы 13, и когда центр масс оказывается снова на оси вращения 15, как и капсула 13, включается двигатель 2 и цикл ускорения аппарата после разгона и новой отстыковки М2 повторяется.
Таким образом, каждое последующее ускорение оказывается значительным, но примерно в 2 раза меньше предыдущего из-за снижения массы М2. Чтобы во время описанной процедуры сохранять суммарный момент количества движения аппарата, для его устойчивости используется сцепление 11 для плавного изменения скорости вращения второго желоба 7 и масс М3 и М4.
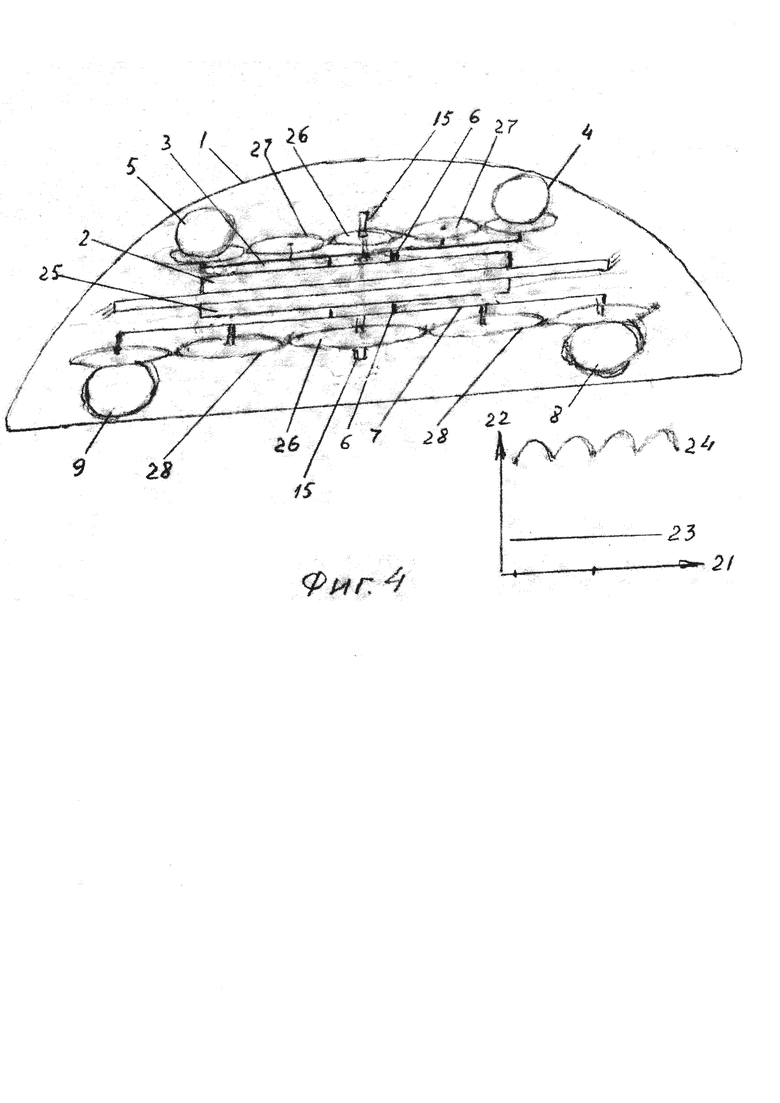
Устройство по п. 2 (или п. 3 для M1 и/или М2) работает следующим образом. При последовательном пуске двигателя 2 и затем одновременном пуске ракетных (реактивных) двигателей на месте масс М1, …, М4 вектор тяги в нормальном к оси 15 направлении (где в корпусе 1 отверстие вдоль его боковой поверхности) развивает мощность, пропорциональную скорости выхлопа (из сопел четырех попарно одинаковых двигателей на местах М1, …, М4), в сумме приблизительно с учетверенной линейной скоростью вращения вала 6 двигателя 2 на расстоянии удаления M1, …, М4 от оси 15 благодаря соответствующей ориентации двигателей вперед соплами по ходу движения на местах М1, …, М4 и их расположению в двух замкнутых камерах 16 (для соответственно вращений по и против часовой стрелки) с общим вышеуказанным отверстием в корпусе 1. Длина отверстий 17 в самих замкнутых камерах порядка 45° вдоль их боковой поверхности. Топливные системы и баки двигателей жестко сопряжены со связанными с ними соответственно желобами 3 и 7. На следующем этапе полета двигатели на местах М1, …, М4 могут использоваться как массы.
Отметим, что в беспилотном режиме у устройства по п. 2 приращения частоты вращения не ограничиваются предельно допустимыми для человека, вращающегося на оси с частотой 8,7 Гц, а могут достигать величину порядка до 1000 Гц, т.е. до предельно возможной частоты двигателя внутреннего сгорания, но при этом с нарастанием линейной скорости <20 g, … , 30 g. Например, на расстоянии от оси R=5 м и w=100 Гц<1 кГц линейная скорость будет V=2пRw=3000 м/сек, а тяга реактивного двигателя при выбросе газа из его сопла со скоростью порядка 1000 м/сек окажется увеличенной в 4 раза.
Благодаря гироскопическому эффекту, вращение реактивных двигателей или масс повышает устойчивость ориентации и полета летательного аппарата вместе с другими существующими способами, использование которых можно ограничить.
Кроме увеличения вектора тяги Р вследствие возрастания результирующей скорости выброса газов из сопла при вращении, дополнительное приращение тяги происходит от повышающих компрессию горения топлива центробежных сил (что экономит топливо) и от пары сил вращающего момента во время перемещения двигателя или массы в направлении к отверстию в задней части корпуса, как показано на фиг. 4, где 21, 22 - координаты периода вращения и величины тяги, 23, 24 - графики величины тяги реактивного двигателя без вращения и с его вращением.
Итак, достигаются большие высота и скорость путем последовательных ускорений с кратковременными допустимыми перегрузками пилотов или космонавтов. В несколько раз, если не на порядок, увеличен вектор тяги реактивного двигателя. Благодаря импульсному режиму работы и повышению компрессии в камерах сгорания из-за центробежных сил экономия топлива пропорциональна скорости полета. Имеется возможность старта с любых площадок.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСМИССИЯ ВНЕДОРОЖНЫХ МАШИН, ПРЕИМУЩЕСТВЕННО ТРАКТОРОВ | 1999 |
|
RU2162799C2 |
| УСТРОЙСТВО ЭНЕРГЕТИЧЕСКОЙ ЗАЩИТЫ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2375260C1 |
| СИЛОВАЯ УСТАНОВКА ДВУХМОТОРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И СПОСОБ УПРАВЛЕНИЯ СИЛОВОЙ УСТАНОВКОЙ | 2020 |
|
RU2746294C1 |
| АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2000 |
|
RU2198113C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ЧЕРЁМУШКИНА О.В. | 2008 |
|
RU2396185C1 |
| ТУРБОРЕАКТИВНЫЙ ДВИГАТЕЛЬ | 2004 |
|
RU2264553C1 |
| ТУРБОРЕАКТИВНЫЙ ДВИГАТЕЛЬ | 2003 |
|
RU2237185C1 |
| МНОГОДИАПАЗОННАЯ ТРЕХПОТОЧНАЯ БЕССТУПЕНЧАТАЯ ТРАНСМИССИЯ НА ОСНОВЕ ПЯТИЗВЕННОГО ДИФФЕРЕНЦИАЛЬНОГО МЕХАНИЗМА | 2014 |
|
RU2554922C1 |
| СПОСОБ СОЗДАНИЯ ТЯГИ И СИЛОВАЯ УСТАНОВКА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2680214C1 |
| ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ С НЕЗАКАПОТИРОВАННЫМИ ВОЗДУШНЫМИ ВИНТАМИ ПРОТИВОПОЛОЖНОГО ВРАЩЕНИЯ | 2019 |
|
RU2806953C2 |
Изобретение относится к области авиации и космонавтики, в частности к конструкциям двигателей летательных аппаратов. Летательный аппарат содержит двигатель, желоб с двумя массами М1, М2 на концах, сопряженный в центре с валом и планетарным редуктором. Вал с редуктором также сопряжен со вторым желобом с двумя массами М3, М4 на концах через механизм сцепления. Вал сопряжен через второй механизм сцепления с капсулой, имеющей возможность смещения нормально к оси вращения, жестко сопряженной с корпусом и через подшипник с валом. Аппарат дополнительно снабжен четырьмя реактивными (ракетными) двигателями и двумя замкнутыми торообразными камерами с отверстиями около 45°-90° вдоль периметра в задней части камер. Достигается возможность старта с любых площадок. 6 з.п. ф-лы, 4 ил.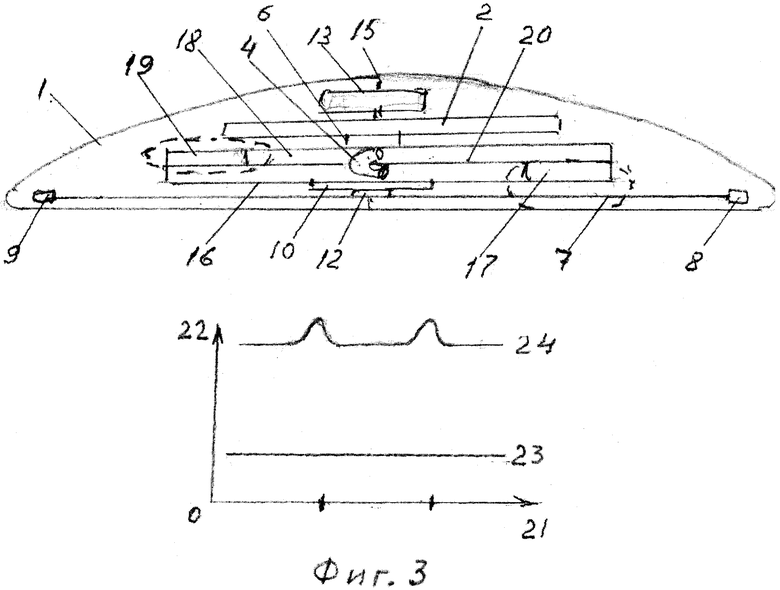
1. Летательный аппарат, содержащий корпус с отверстием, двигатель, дополнительно снабжен желобом с двумя массами на концах, сопряженным в центре с валом и планетарным редуктором, сопряженным со вторым желобом с двумя массами на концах через механизм сцепления, вал сопряжен через второй механизм сцепления с капсулой, имеющей возможность смещения нормально к оси вращения, жестко сопряженной с корпусом и через подшипник с валом.
2. Летательный аппарат по п. 1, отличающийся тем, что дополнительно снабжен двумя камерами с отверстиями около 45°-90°, расположенными вдоль периметра в задней части камер.
3. Летательный аппарат по п. 1, отличающийся тем, что дополнительно снабжен камерой с отверстием около 45°-90°, расположенной вдоль периметра задней части камеры.
4. Летательный аппарат по п. 1, отличающийся тем, что дополнительно снабжен двигателями и отверстием около 45°-90°, расположенными в передней верхней части боковой поверхности замкнутой камеры, разделенной внутри вне объема двигателей поверхностью на верхнюю и нижнюю части, в нижней задней части камеры расположено отверстие около 45°-90°.
5. Летательный аппарат по любому из пп. 2-4, отличающийся тем, что выполнен с возможностью крепления к фюзеляжу самолета под его центром масс и использования в качестве двигателя и/или стабилизатора планирования самолета без работы реактивных двигателей.
6. Летательный аппарат по любому из пп. 2-4, отличающийся тем, что выполнен с импульсным и периодическим режимом работы реактивных двигателей с частотой их вращения.
7. Летательный аппарат по п. 1, отличающийся тем, что снабжен вторым поршневым двигателем.
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ЦЕНТРОБЕЖНОЙ СИЛЫ В СИЛУ ТЯГИ | 2009 |
|
RU2454353C2 |
| DE 3734811 A1, 23.06.1988 | |||
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ТАРЕЛЬЧАТОГО ТИПА | 2007 |
|
RU2368539C2 |
| CN 101700809 A, 05.05.2010. | |||

