ОБЛАСТЬ ПРИМЕНЕНИЯ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится в целом к хирургическим устройствам, а в частности - к способам и устройствам для наложения хирургических клипс на каналы, сосуды, наложения анастомозов и т.д.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Хирургические клипсонакладыватели часто используются для лигирования кровеносных сосудов, каналов, анастомозов или участков тканей организма во время хирургических операций. Большинство клипсонакладывателей, как правило, имеет рукоятку с удлиненным стволом, на конце которого есть пара противолежащих подвижных зажимов для удержания ткани и наложения лигирующей клипсы. Зажимы располагают вокруг сосуда или канала. После этого, сближая зажимы, зажимают или формируют клипсу на сосуде.
Клипсонакладыватель, выполненный с возможностью установки нескольких клипс, как правило, имеет механизм продвижения, который последовательно подает клипсы к зажимам устройства. Во многих клипсонакладывателях зажимы расположены под углом к стволу, для того чтобы обеспечить лучшую видимость. Если зажимы располагаются под углом, то клипса, подаваемая к зажимам, меняет ориентацию. Изменение ориентации может приводить к нарушению взаимного расположения механизма продвижения клипсы, в результате чего клипса подается в зажимы неправильно, а при наложении на ткань - деформируется. Проблемы также могут возникать, когда механизм продвижения возвращается за следующей клипсой и не может захватить ее, чтобы вытолкнуть к зажимам.
Следовательно, существует потребность в усовершенствованных способах и устройствах для наложения хирургических клипс на сосуды, каналы, наложения анастомозов и т.д.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В настоящем изобретении предложен способ и хирургические устройства для наложения клипсы на сосуд, канал, наложения анастомозов и т.д. В одном варианте осуществления предлагается хирургический клипсонакладыватель, который включает ствол, имеющий проксимальный конец и дистальный конец, а на его дистальном конце находятся противолежащие зажимы. В стволе может находиться направляющий элемент, выполненный с возможностью направлять клипсу к указанным противолежащим зажимам. На поверхности направляющего элемента может быть выполнен канал. Устройство также может включать механизм продвижения, подвижно установленный в стволе и выполненный с возможностью продвижения клипсы по направляющему элементу в противолежащие зажимы. Механизм продвижения может иметь дистальную головку, которая скользит по каналу для поддержания контакта с хирургической клипсой в процессе ее продвижения к противолежащим зажимам.
В одном варианте осуществления дистальная наружная головка может иметь дистальную наружную поверхность, выполненную с возможностью опоры на вершину хирургической клипсы и продвижения этой клипсы к противолежащим зажимам. Высота дистальной поверхности дистальной головки может превышать глубину канала. В одном варианте осуществления канал направляющего элемента может быть выполнен в виде сквозного отверстия в направляющем элементе. В проксимальной части канала может находиться наклонная поверхность, выполненная с возможностью способствовать отклонению проксимальной части дистальной головки от направляющего элемента при движении механизма продвижения в проксимальном направлении. В дистальной части канала также может находиться наклонная поверхность, выполненная с возможностью способствовать отклонению дистальной части дистальной головки от направляющего элемента при движении механизма продвижения в дистальном направлении. В направляющем элементе также может находиться продольно ориентированная канавка, выполненная с возможностью по существу предотвращать боковое смещение дистальной головки относительно противолежащих боковых стенок направляющего элемента.
Устройство также может иметь по меньшей мере одну клипсу в стволе. В одном варианте осуществления клипса может иметь максимальную высоту, измеряемую в поперечном направлении относительно продольной оси ствола, а дистальная головка может иметь максимальную высоту, измеряемую в поперечном относительно продольной оси ствола направлении, при этом такая высота превышает высоту по меньшей мере одной клипсы. В других аспектах изобретения направляющий элемент может иметь форму или может содержать тканевый упор, имеющий дистальный конец с углублением для приема ткани. Противолежащие зажимы могут быть выполнены с возможностью захвата противолежащих ножек хирургической клипсы так, чтобы вершина хирургической клипсы находилась на некотором расстоянии над направляющим элементом при продвижении хирургической клипсы в противолежащие зажимы.
В другом варианте осуществления предлагается хирургический клипсонакладыватель, имеющий ствол, на дистальном конце которого находятся противолежащие зажимы. Противолежащие зажимы выполнены с возможностью перемещения между открытым и закрытым положениями для наложения клипсы на ткань. Механизм продвижения клипс может быть подвижно установлен в стволе и может иметь дистальную головку, выполненную с возможностью продвижения по меньшей мере одной клипсы в противолежащие зажимы. Устройство также может содержать направляющую механизма продвижения, расположенную в удлиненном стволе. Направляющая механизма продвижения может иметь наклонную поверхность, выполненную с возможностью способствовать отклонению дистальной части дистальной головки от направляющего элемента при движении механизма продвижения в проксимальном направлении, чтобы дистальная головка размещалась позади вершины хирургической клипсы, которая находится в стволе. В одном варианте осуществления указанная наклонная поверхность может представлять собой проксимальную наклонную поверхность, а направляющий элемент может иметь дистальную наклонную поверхность, выполненную с возможностью способствовать отклонению дистальной части дистальной головки от направляющего элемента при движении механизма продвижения в дистальном направлении. В направляющей механизма продвижения может быть выполнен канал, а проксимальная наклонная поверхность может быть выполнена смежной с проксимальным концом этого канала, при этом дистальная наклонная поверхность может быть выполнена смежной с дистальным концом этого канала. В другом варианте осуществления дистальная головка может иметь дистальную наружную поверхность, высота которой превышает глубину канала в направляющей механизма продвижения. Направляющая механизма продвижения также может иметь дистальную продольно ориентированную канавку, по которой скользит дистальная головка направляющей механизма продвижения.
Также предложен способ продвижения клипс в противолежащие зажимы хирургического клипсонакладывателя, и в одном варианте осуществления способ включает этап, на котором приводят в действие спусковой крючок, что приводит к перемещению механизма продвижения в стволе в дистальном направлении и контактированию и перемещению в дистальном направлении хирургической клипсы по верхней поверхности направляющего элемента и в противолежащие зажимы устройства. Механизм продвижения может иметь дистальную головку с дистальной наружной поверхностью, которая позволяет передвигать вершину хирургической клипсы в направлении вверх или вниз, сохраняя при этом контакт с вершиной хирургической клипсы. Способ также может включать этап, на котором отпускают спусковой крючок для перемещения механизма продвижения в проксимальном направлении. При движении механизма продвижения в проксимальном направлении дистальная головка механизма продвижения может отклоняться вниз, под нижнюю поверхность второй хирургической клипсы. В одном примере осуществления при движении механизма продвижения в проксимальном направлении направляющий элемент может отклонять дистальную головку механизма продвижения вверх, чтобы установить дистальную головку механизма продвижения в проксимальное положение относительно второй хирургической клипсы. В других вариантах осуществления в направляющем элементе может быть выполнен канал, обеспечивающий выравнивание дистальной головки механизма продвижения вдоль продольной оси направляющего элемента. Конец механизма продвижения может поддерживать контакт с вершиной клипсы, когда клипса формируется между противолежащими зажимами.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Принцип настоящего изобретения станет более понятным на примере следующего подробного описания в сочетании с сопроводительными иллюстрациями.
На Фиг.1A представлен вид сбоку одного варианта осуществления хирургического клипсонакладывателя.
На Фиг.1B представлен хирургический клипсонакладыватель, изображенный на Фиг.1A, в разобранном виде.
На Фиг.2A представлен вид сверху узла держателя зажимов хирургического клипсонакладывателя, изображенного на Фиг.1A.
На Фиг.2B представлен вид снизу узла держателя зажимов, изображенного на Фиг.2A.
На Фиг.2C представлен вид сбоку узла держателя зажимов, изображенного на Фиг.2B.
На Фиг.2D представлен вид в поперечном сечении по линии D-D узла держателя зажимов, изображенного на Фиг.2C.
На Фиг.3A представлен вид сверху подающего лотка, используемого в узле держателя зажимов, изображенного на Фиг.2A-2D.
На Фиг.3B представлен вид снизу подающего лотка, изображенного на Фиг.3A.
На Фиг.4A представлен вид сбоку в перспективе толкателя, выполненного с возможностью перемещения подающего лотка, изображенного на Фиг.3A и 3B, через узел держателя зажимов, изображенный на Фиг.2A-2D.
На Фиг.4B представлен вид сбоку проксимального конца толкателя, изображенного на Фиг.4A, и проксимального конца планки держателя зажимов, изображенной на Фиг.2A и 2B, в котором толкатель находится в крайнем проксимальном положении.
На Фиг.4C представлен вид сбоку толкателя и планки держателя зажимов, изображенных на Фиг.4B, в котором толкатель находится в крайнем дистальном положении.
На Фиг.4D представлен вид сбоку другого варианта осуществления проксимального конца толкателя, который изображен в соединении с проксимальным концом планки держателя зажимов, изображенном на Фиг.2A и 2B, в котором толкатель находится в крайнем проксимальном положении.
На Фиг.4E представлен вид сбоку толкателя и планки держателя зажимов, изображенных на Фиг.4D, в котором толкатель находится в крайнем дистальном положении.
На Фиг.4F представлен вид сбоку еще одного варианта осуществления проксимального конца толкателя, который изображен в соединении с проксимальным концом планки держателя зажимов, изображенном на Фиг.2A и 2B, в котором толкатель находится в крайнем проксимальном положении.
На Фиг.4G представлен вид сбоку толкателя и планки держателя зажимов, изображенных на Фиг.4F, в котором толкатель находится в промежуточном положении.
На Фиг.4H представлен вид сбоку толкателя и планки держателя зажимов, изображенных на Фиг.4F, в котором толкатель находится в крайнем дистальном положении.
На Фиг.5A представлен вид сбоку в перспективе механизма продвижения, выполненного с возможностью соединения с дистальным концом толкателя, изображенного на Фиг.4A.
На Фиг.5B представлен вид сбоку в перспективе другого варианта осуществления механизма продвижения, выполненного с возможностью соединения с дистальным концом толкателя, изображенным на Фиг.4A.
На Фиг.5C представлен вид в перспективе еще одного варианта осуществления механизма продвижения, выполненного с возможностью соединения с дистальным концом толкателя, изображенным на Фиг.4A.
На Фиг.5D представлен еще один вид в перспективе механизма продвижения, изображенного на Фиг.5C.
Фиг.6A представлен в поперечном сечении узел механизма продвижения клипс, включающий узел держателя зажимов, изображенный на Фиг.2A-2D, подающий лоток, изображенный на Фиг.3A-3B, и толкатель, изображенный на Фиг.4A, в котором толкатель показан в исходном проксимальном положении относительно канала для клипс в узле держателя зажимов.
На Фиг.6B представлен в поперечном сечении узел механизма продвижения клипс, изображенный на Фиг.6A, в котором толкатель перемещен в дистальном направлении.
На Фиг.6C представлен в поперечном сечении узел механизма продвижения клипс, изображенный на Фиг.6B, в котором толкатель перемещен в дистальном направлении еще дальше, в результате чего подающий лоток и контейнер для клипс, расположенный дистальнее лотка, перемещаются в дистальном направлении.
На Фиг.6D представлен в поперечном сечении узел механизма продвижения клипс, изображенный на Фиг.6C, в котором толкатель вернулся в исходное проксимальное положение, изображенное на Фиг.6A, а подающий лоток и контейнер для клипс остались в выдвинутом положении, изображенном на Фиг.6C.
На Фиг.6E представлен вид снизу в перспективе механизма продвижения, изображенного на Фиг.5A, находящегося в канале для клипс в узле держателя зажимов, изображенном на Фиг.2A-2D, в котором механизм продвижения показан в крайнем проксимальном положении;
На Фиг.6F представлен вид снизу в перспективе механизма продвижения, изображенного на Фиг.6E, в котором механизм продвижения показан в крайнем дистальном положении после продвижения клипсы в зажимы клипсонакладывателя.
На Фиг.7 представлен вид сбоку в перспективе пары зажимов хирургического клипсонакладывателя, изображенного на Фиг.1A.
На Фиг.8 представлен вид сбоку в перспективе кулачковой планки, используемой вместе с зажимами, изображенными на Фиг.7.
На Фиг.9 представлен вид сверху в перспективе стержня толкателя, выполненного с возможностью соединения с кулачковой планкой, изображенной на Фиг.8, для перемещения кулачковой планки относительно зажимов, изображенных на Фиг.7.
На Фиг.10A представлен вид сверху кулачковой планки, изображенной на Фиг.8, соединенной с зажимами, изображенными на Фиг.7, в котором кулачковая планка находится в исходном положении, а зажимы открыты.
На Фиг.10B представлен вид сверху кулачковой планки, изображенной на Фиг.8, соединенной с зажимами, изображенными на Фиг.7, в котором кулачковая планка выдвинута над зажимами, а зажимы закрыты.
На Фиг.11A представлен вид сверху в перспективе тканевого упора, выполненного с возможностью соединения с дистальным концом канала для клипс в узле держателя зажимов, изображенного на Фиг.2A-2D.
На Фиг.11B представлен вид сверху в перспективе другого варианта осуществления тканевого упора с выполненной на нем наклонной плоскостью для направления клипсы в зажимы и для стабилизации клипсы в процессе придания ей нужной формы.
На Фиг.11C представлен вид сбоку тканевого упора, изображенного на Фиг.11B.
На Фиг.11D представлено увеличенное изображение тканевого упора, изображенного на Фиг.11B и 11C.
На Фиг.11E представлен вид в перспективе другого варианта осуществления тканевого упора, выполненного с возможностью соединения с дистальным концом канала для клипс в узле держателя зажимов, изображенного на Фиг.2A-2D.
На Фиг.11F представлено еще одно перспективное изображение тканевого упора, изображенного на Фиг.11E.
На Фиг.12A представлен вид сверху дистального конца хирургического клипсонакладывателя, изображенного на Фиг.1A, в котором тканевый упор, изображенный на Фиг.11A, размещается между зажимами, изображенными на Фиг.7.
На Фиг.12B представлено перспективное изображение механизма продвижения, изображенного на Фиг.5C, который подает клипсу через тканевый упор, изображенный на Фиг.11E.
На Фиг.12C представлено перспективное изображение механизма продвижения, изображенного на Фиг.5C, в дистальном положении на тканевом упоре, изображенном на Фиг.11E.
На Фиг.12D представлено перспективное изображение механизма продвижения, изображенного на Фиг.5C, отклоненного под крайнюю дистальную клипсу в канале, образуемом тканевым упором, изображенным на Фиг.11E.
На Фиг.12E представлено перспективное изображение механизма продвижения, изображенного на Фиг.5C, в проксимальном положении на тканевом упоре, изображенном на Фиг.11E.
На Фиг.13 вид сбоку в частичном сечении части рукоятки хирургического клипсонакладывателя, изображенного на Фиг.1A.
На Фиг.14 представлен вид в перспективе спускового крючка хирургического клипсонакладывателя, изображенного на Фиг.1A.
На Фиг.15A представлен вид сбоку в перспективе одной половины муфты толкателя хирургического клипсонакладывателя, изображенного на Фиг.1A.
Фиг.15B представлен вид сбоку в перспективе другой половины муфты толкателя, изображенной на Фиг.15A.
На Фиг.16 представлен вид сверху в перспективе гибкого звена, входящего в состав узла механизма продвижения клипс хирургического клипсонакладывателя, изображенного на Фиг.1A.
На Фиг.17A представлен вид сбоку в частичном сечении части рукоятки хирургического клипсонакладывателя, изображенного на Фиг.1A, в котором узел механизма продвижения клипс находится в исходном положении.
На Фиг.17B представлен вид сбоку в частичном сечении части рукоятки хирургического клипсонакладывателя, изображенного на Фиг.17A, в котором узел механизма продвижения клипс находится в частично активированном положении.
На Фиг.17C представлен вид сбоку в частичном сечении части рукоятки хирургического клипсонакладывателя, изображенной на Фиг.17B, в котором узел механизма продвижения клипс находится в полностью активированном положении.
На Фиг.17D представлен вид сбоку в частичном сечении части рукоятки хирургического клипсонакладывателя, изображенного на Фиг.17A, в котором активирован узел формирования клипс.
На Фиг.18 представлен вид сбоку ролика замыкающего звена, который является частью узла формирования клипс хирургического клипсонакладывателя, изображенного на Фиг.1A.
На Фиг.19 представлен вид сверху в перспективе замыкающего звена, которое соединяется с роликом замыкающего звена, изображенным на Фиг.18, который является частью узла формирования клипс хирургического клипсонакладывателя, изображенного на Фиг.1A.
На Фиг.20A представлен вид сверху в перспективе сцепного устройства замыкающего звена, которое соединяется с замыкающим звеном, изображенным на Фиг.19, а также является частью узла формирования клипс хирургического клипсонакладывателя, изображенного на Фиг.1A.
На Фиг.20B представлен вид снизу сцепного устройства замыкающего звена, изображенного на Фиг.20A, соединенного со стержнем толкателя, изображенным на Фиг.9, и содержащего один вариант осуществления отклоняющего элемента.
На Фиг.20C представлен вид снизу замыкающего звена, изображенного на Фиг.20A, соединенного со стержнем толкателя, изображенным на Фиг.9, и содержащего другой вариант осуществления отклоняющего элемента.
На Фиг.20D представлен график нагрузки, необходимой для изменения положения отклоняющего элемента, изображенного на Фиг.20B.
На Фиг.20E представлен вид сбоку другого варианта осуществления сцепного устройства замыкающего звена, имеющего ребра.
На Фиг.21A представлено увеличенное перспективное изображение противовозвратного механизма хирургического клипсонакладывателя, изображенного на Фиг.1A.
На Фиг.21B представлено перспективное изображение предохранительного механизма, являющегося частью противовозвратного механизма, изображенного на Фиг.21A.
На Фиг.22A представлен вид сбоку в частичном сечении части рукоятки хирургического клипсонакладывателя, изображенного на Фиг.1A, в котором противовозвратный механизм находится в исходном положении.
На Фиг.22B представлен вид сбоку в частичном сечении части рукоятки хирургического клипсонакладывателя, изображенного на Фиг.22A, в котором противовозвратный механизм находится в частично активированном положении.
На Фиг.22C представлен вид сбоку в частичном сечении части рукоятки хирургического клипсонакладывателя, изображенного на Фиг.22B, в котором противовозвратный механизм находится в полностью активированном положении.
На Фиг.22D представлен вид сбоку в частичном сечении части рукоятки хирургического клипсонакладывателя, изображенного на Фиг.22C, в котором противовозвратный механизм возвращается в исходное положение.
На Фиг.22E представлен вид сбоку в частичном сечении части рукоятки хирургического клипсонакладывателя, изображенного на Фиг.22D, в котором противовозвратный механизм вернулся в исходное положение.
На Фиг.23A представлен в разобранном виде механизм защиты от перегрузки хирургического клипсонакладывателя, изображенного на Фиг.1A.
На Фиг.23B представлен в частичном сечении вид механизма защиты от перегрузки, изображенного на Фиг.23A, в котором ролик замыкающего звена сначала соприкасается с профильным звеном.
На Фиг.23C представлено частичное сечение механизма защиты от перегрузки, изображенного на Фиг.23B, в котором ролик замыкающего звена оказывает давление на профильное звено, заставляя профильное звено вращаться.
На Фиг.23D представлено перспективное изображение другого варианта осуществления механизма защиты от перегрузки, предназначенного для использования в хирургическом клипсонакладывателе.
На Фиг.24A представлен вид сбоку в перспективе колеса отображения количества клипс в хирургическом клипсонакладывателе, изображенном на Фиг.1A.
На Фиг.24B представлен вид сбоку колеса отображения количества клипс, изображенного на Фиг.24A.
На Фиг.25 представлен вид сверху в перспективе привода для колеса отображения количества клипс, изображенного на Фиг.24.
На Фиг.26A представлен вид сбоку в частичном сечении части рукоятки хирургического клипсонакладывателя, изображенного на Фиг.1A, в котором показано движение привода количества клипс, изображенного на Фиг.25, и колеса отображения количества клипс, изображенного на Фиг.24.
На Фиг.26B представлен вид сбоку в частичном сечении части рукоятки хирургического клипсонакладывателя, изображенной на Фиг.26A, в котором показано дальнейшее движение привода для колеса для отображения количества клипс, изображенного на Фиг.25, и колеса отображения количества клипс, изображенного на Фиг.24.
На Фиг.27A представлен вид сбоку другого варианта осуществления подающего лотка с А-образным изгибом, выполненным с возможностью создания трения между подающим лотком и каналом для клипс.
На Фиг.27B представлен вид сбоку другого варианта осуществления подающего лотка с V-образным изгибом, выполненным с возможностью создания трения между подающим лотком и каналом для клипс.
На Фиг.28A представлен вид сверху в перспективе участка канала для клипс, содержащего выступы на поверхности и выполненного с возможностью трения между ним и подающим лотком в соответствии с другим вариантом осуществления изобретения.
На Фиг.28B представлен вид с торца в перспективе другого варианта осуществления подающего лотка, имеющего хвостовик, выполненный с возможностью зацепления поверхностных выступов, выполненных в канале для клипс и изображенных на Фиг.28A.
На Фиг.29A представлен вид снизу в перспективе другого варианта осуществления подающего лотка, имеющего на хвостовике стопорный язычок, выполненный с возможностью зацепления за соответствующий паз в толкателе.
На Фиг.29B представлен вид сверху в перспективе другого варианта осуществления толкателя, имеющего зацепную канавку, выполненную с возможностью вхождения в нее стопорного язычка на хвостовике подающего лотка, изображенного на Фиг.29A.
На Фиг.29C представлен вид сбоку в поперечном сечении подающего лотка, изображенного на Фиг.29A, находящегося внутри и в зацеплении с толкателем, изображенным на Фиг.29B.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В настоящем изобретении в целом предложен хирургический клипсонакладыватель и способы использования хирургического клипсонакладывателя для наложения хирургических клипс на сосуды, каналы, наложения анастомозов и т.д. во время хирургических операций. Пример варианта осуществления хирургического клипсонакладывателя может иметь различные особенности, упрощающие процесс наложения хирургических клипс, которые описаны в настоящем документе и проиллюстрированы фигурами. Тем не менее специалисту в данной области будет понятно, что хирургический клипсонакладыватель может содержать только некоторые из таких особенностей и (или) содержать другие особенности, известные в данной области техники. Описанный в настоящем документе хирургический клипсонакладыватель предназначен только для демонстрации некоторых вариантов осуществления изобретения.
На Фиг.1A представлен один пример осуществления хирургического клипсонакладывателя 10. Как показано на чертеже, клипсонакладыватель 10 в общем случае имеет корпус 12 с неподвижной рукояткой 14 и подвижной рукояткой или спусковым крючком 16, шарнирно прикрепленным к корпусу 12. Удлиненный ствол 18 отходит от корпуса 12, и на его дистальном конце находится пара противолежащих зажимов 20, предназначенных для загибания хирургической клипсы. Удлиненный ствол 18 может соединяться с корпусом 12 с возможностью вращения и может иметь вращательную ручку 22 для поворота ствола 18 относительно корпуса 12. На Фиг.1B представлен в разобранном виде хирургический клипсонакладыватель 10, изображенный на Фиг.1A. Его различные компоненты будут более подробно рассмотрены ниже.
На Фиг.2A-12 представлены примеры осуществления различных компонентов ствола 18 хирургического клипсонакладывателя 10. Как правило, как показано на Фиг.1B, ствол 18 имеет внешнюю трубку 24, в которой находятся компоненты ствола, к которым могут относиться узел держателя зажима 26, включающий планку держателя зажимов 28, на которой предусмотрены канал для клипс 30 и канал стержня толкателя 32. Зажимы 20 могут быть выполнены с возможностью присоединения к дистальному концу канала для клипс 30. Узел ствола 18 также может включать узел механизма продвижения клипс, который в одном варианте осуществления может включать подающий лоток 34, подвижно размещенный в канале для клипс 30 и перемещающий комплект клипс 36, находящихся в канале, а также толкатель 38, выполненный с возможностью перемещения подающего лотка 34 по каналу для клипс 30. Толкатель 38 может включать узел механизма продвижения 40, который закрепляется на дистальном конце толкателя и используется для продвижения крайней дистальной клипсы в зажимы 20. Узел ствола 18 также включает узел формирования клипс или кулачковый узел, который в одном примере осуществления может содержать кулачковую планку 42, подвижно соединенную с зажимами 20, и стержень толкателя 44, который может соединяться с кулачковой планкой 42 и двигать планку 42 относительно зажимов 20. Узел ствола также может включать тканевый упор 46, который может соединяться с дистальным концом канала для клипс 30 для более простого размещения зажимов 20 в операционном поле.
Различные компоненты одного примера осуществления узла механизма продвижения клипс более подробно изображены на Фиг.2A-5. На Фиг.2A-2D представлен узел держателя зажима 26, который включает удлиненную и преимущественно плоскую планку держателя зажимов 28, имеющую проксимальный конец 28a, соединяемый с внешней трубкой 24, и дистальный конец 28b, выполненный с возможностью соединения с зажимами 20. Несмотря на то что для крепления проксимального конца 28a планки держателя зажимов 28 к внешней трубке 24 могут использоваться разные способы, в представленном варианте осуществления проксимальный конец 28a имеет зубцы 31, выполненные на его противоположных сторонах, которые должны входить в отверстия или выемки внешней трубки 24, а также вырез 29, который позволяет противоположным сторонам проксимального конца 28a прогибаться или образовывать пружину. В частности, вырез 29 позволяет прижимать противоположные стороны проксимального конца 28a планки держателя зажимов 28 друг к другу при вставке планки держателя зажимов 28 в наружную трубку 24. После совмещения зубцов 31 с соответствующими отверстиями во внешней трубке 24 проксимальный конец 28a планки держателя зажимов 28 возвращается в исходное несжатое состояние, в результате чего зубцы 31 входят в соответствующие отверстия и зацепляются за внешнюю трубку 24. Как будет более подробно описано применительно к Фиг.4A, устройство также может содержать деталь, предотвращающую сжатие противоположных сторон проксимального конца 28a планки держателя зажимов 28 в процессе использования устройства для предотвращения случайного отсоединения зубцов 31 от внешней трубки 24.
Также могут использоваться различные методики для соединения дистального конца 28b планки держателя зажимов 28 с зажимами 20, однако в представленном варианте осуществления дистальный конец 28b планки держателя зажимов 28 имеет несколько вырезов или зубцов 78, соединяемых с соответствующими выступами или зубцами 94 на зажимах 20, как будет более подробно описано ниже применительно к Фиг.7. Зубцы 78 позволяют установить проксимальную часть зажимов 20 преимущественно в одной плоскости с планкой держателя зажимов 28.
На поверхности узла держателя зажимов 26 также может находиться канал стержня толкателя 32, в котором подвижно установлен стержень толкателя 44, используемый для продвижения кулачковой планки 42 через зажимы 20, как будет более подробно рассмотрено ниже. Канал стержня толкателя 32 может быть сформирован различными способами и может иметь любую форму и размер, зависящие от формы и размера стержня толкателя 44. Как показано на Фиг.2D, канал стержня толкателя 32 неподвижно закреплен, например, путем сварки, на верхней поверхности планки держателя зажимов 28. Он имеет преимущественно прямоугольную форму и образует сквозной путь 32a. Канал стержня толкателя 32 может проходить через всю планку держателя зажимов 28 или только через ее часть. Специалисту в данной области будет понятно, что узел держателя зажимов 26 не обязательно должен включать канал стержня толкателя 32 для более простого перемещения стержня толкателя 44 в удлиненном стволе 18 клипсонакладывателя 10.
На Фиг.2A-2D дополнительно показано, что узел держателя зажимов 26 также может содержать канал для клипс 30, который прикрепляется или формируется на его поверхности. Как показано, канал для клипс 30 прикреплен к нижней поверхности планки держателя зажимов 28 и выходит в дистальном направлении за дистальный конец 28b планки держателя зажимов 28, чтобы дистальный конец 30b канала для клипс 30 находился преимущественно на одной линии с зажимами 20. На практике канал для клипс 30 выполняется так, чтобы в нем могли находиться по меньшей мере одна, а предпочтительно - несколько клипс. Следовательно, канал для клипс 30 может включать противолежащие боковые направляющие 80a и 80b, в которые ножки клипс должны попадать так, чтобы они располагались соосно относительно друг друга. В одном примере осуществления канал для клипс 30 может быть выполнен с возможностью хранения приблизительно двадцати клипс, загруженных в канал 30 в процессе изготовления. Специалисту в данной области будет понятно, что форма, размер и конфигурация канала для клипс 30 могут изменяться в зависимости от формы, размера и конфигурации клипс или других приспособлений для сшивания, например, скобок, помещаемых в канал. Более того, вместо канала для клипс 30 могут использоваться другие методики соединения контейнера для клипс с удлиненным стволом 18.
В канале для клипс 30 также может быть выполнено несколько отверстий для приема хвостовика 82a подающего лотка 34, устанавливаемого в канале для клипс 30, как будет более подробно рассмотрено ниже. В одном примере осуществления канал для клипс 30 содержит некоторое количество отверстий 30c, соответствующее по меньшей мере количеству клипс, загружаемых в устройство 10 и накладываемых во время его использования. Предпочтительно отверстия 30c находятся на одинаковом расстоянии друг от друга, чтобы хвостовик 82a на подающем лотке 34 входил в зацепление с отверстием 30c при каждом продвижении подающего лотка 34 вперед. Канал для клипс 30 вместо отверстий 30с может содержать фиксаторы (не показаны) или другие детали, позволяющие каналу для клипс 30 зацеплять подающий лоток 34 и предотвращать движение подающего лотка 34 в дистальном направлении, позволяя ему двигаться в проксимальном направлении. Канал для клипс 30, как показано на Фиг.2B, также может содержать стопорный хвостовик 118, который входит в зацепление с соответствующим стопорным хвостовиком на подающем лотке 34 для предотвращения выхода подающего лотка 34 за крайнее дистальное положение, как описано ниже. Стопорный хвостовик 118 может иметь различные конфигурации, но в одном примере осуществления он имеет форму двух смежных лапок, отходящих в направлении друг друга и закрывающих часть канала для клипс, что позволяет клипсам проходить через них.
Пример подающего лотка 34, более подробно изображенного на Фиг.3A и 3B, выполненный с возможностью непосредственного проведения клипс по каналу для клипс 30. Хотя подающий лоток 34 может иметь разные конфигурации и проведение клипс по каналу для клипс 30 может выполняться различными другими способами, в одном примере осуществления подающий лоток 34 имеет в целом вытянутую форму, а также проксимальный и дистальный концы 34a и 34b. Дистальный конец 34b может быть выполнен так, чтобы в него упиралась крайняя проксимальная клипса в канале для клипс 30, а он мог проталкивать клипсу(-ы) по каналу 30. В представленном примере осуществления дистальный конец 34b имеет преимущественно v-образную форму для прилегания к v-образному изгибу клипсы. На дистальном конце 34b также есть выемка прямоугольной формы 34c, чтобы механизм продвижения 40 мог зацеплять крайнюю дистальную клипсу и подавать ее в зажимы 20, как будет более подробно описано ниже. Конечно, дистальному концу 34b может быть придана любая форма, в зависимости от конфигурации клипсы или другого приспособления для сшивания, используемого в устройстве 10.
В другом примере осуществления подающий лоток 34 также может содержать детали, облегчающие перемещение подающего лотка 34 в канале для клипс 30 в дистальном направлении и преимущественно предотвращающие движение подающего лотка 34 в канале для клипс 30 в проксимальном направлении. В такой конфигурации обеспечивается продвижение и правильное расположение клипс в канале для клипс 30 и, следовательно, при каждом нажатии на спусковой крючок 16 крайняя дистальная клипса будет подаваться между зажимами 20, как более подробно описано ниже. В проиллюстрированном варианте осуществления на верхней поверхности 34s подающего лотка 34 есть хвостовик 82a, наклоненный в проксимальном направлении и предназначенный для зацепления за одно из отверстий 30c в канале для клипс 30. При использовании устройства хвостовик 82a позволяет подающему лотку 34 перемещаться по каналу для клипс 30 в дистальном направлении. При каждом продвижении подающего лотка 34 хвостовик 82a перемещается в дистальном направлении от одного отверстия 30c к следующему отверстию 30c в канале для клипс 30. Зацепление хвостовика 82a за отверстие 30c в канале для клипс 30 не дает подающему лотку 34 двигаться в проксимальном направлении и возвращаться в предыдущее положение, как более подробно описано ниже.
Для облегчения движения подающего лотка 34 в проксимальном направлении по каналу для клипс 30 на нижней поверхности 34i подающего лотка 34 может быть предусмотрен хвостовик 82b, как изображено на Фиг.3B, дающий возможность зацеплять подающий лоток 34 толкателем 38 (Фиг.4A) при движении толкателя 38 в дистальном направлении. Нижний хвостовик 82b похож на верхний хвостовик 82a тем, что он также может быть наклонен в проксимальном направлении. В процессе использования устройства при каждом движении толкателя 38 в дистальном направлении фиксатор 84 на толкателе 38 может входить в зацепление с нижним хвостовиком 82b и перемещать подающий лоток 34 по каналу для клипс 30 в дистальном направлении на заданное расстояние. Затем толкатель 38 может перемещаться в проксимальном направлении, возвращаясь в исходное положение, а наклон нижнего хвостовика 82b позволяет этому хвостовику 82b входить в следующий фиксатор 84 на толкателе 38. Как указано выше, вместо хвостовиков 82a и 82b и отверстий 30c или фиксаторов 84 для управления перемещением подающего лотка 34 в канале для клипс 30 могут использоваться другие детали.
Как было указано выше, на подающем лотке 34 может быть предусмотрен стопор, выполненный с возможностью останова перемещения подающего лотка 34, когда лоток 34 достигает крайнего дистального положения, а в устройстве 10 больше нет клипс. Хотя стопор может иметь различные конфигурации, на Фиг.3A и 3B показан третий хвостовик 82c на подающем лотке 34, отходящий в нижнем направлении, который предназначен для зацепления за стопорный хвостовик 118 (Фиг.2B) на канале для клипс 30. Такой третий хвостовик 82c расположен таким образом, что он зацепляется за стопорный хвостовик 118 на канале для клипс 30, когда подающий лоток 34 находится в крайнем дистальном положении, в результате чего предотвращается движение подающего лотка 34 и толкателя 38 при исчерпании запаса клипс.
На Фиг.4A представлен пример осуществления толкателя 38 для перемещения подающего лотка 34 по каналу для клипс 30 узла держателя зажимов 26. Как показано, толкатель 38 имеет преимущественно удлиненную форму с дистальным и проксимальным концами 38a и 38b. Проксимальный конец 38a толкателя 38a может быть выполнен с возможностью соединения с муфтой толкателя 50 (Фиг.1B), которая будет более подробно описана ниже. Муфта толкателя 50 может крепиться к звену продвижения 52, которое при нажатии на спусковой крючок 16 может перемещать толкатель 38 в дистальном направлении в удлиненном стволе 18. Дистальный конец 38b толкателя 38b может быть выполненный с возможностью соединения с механизмом продвижения 40, 40', примерные варианты осуществления которых показаны на Фиг.5A и 5B, в результате чего крайняя дистальная клипса в канале для клипс 30 перемещается в зажимы 20, как более подробно рассмотрено ниже.
Как было указано выше, проксимальный конец 38a толкателя 38 может иметь деталь, предотвращающую сжатие противолежащих сторон проксимального конца 28a планки держателя зажимов 28 (Фиг.2A и 2B) в процессе использования устройства для предотвращения случайного отсоединения зубцов 31 от внешней трубки 24. В одном примере осуществления, изображенном на Фиг.4A-4C, на проксимальном конце 38a толкателя 38 может быть предусмотрен выступ 39, который должен входить в отверстие 29 на проксимальном конце 28a планки держателя зажимов 28. Когда толкатель 38 находится в крайнем проксимальном положении (то есть когда спусковой крючок 16 находится в открытом положении), выступ 39 будет находиться у проксимального конца отверстия 29, как показано на Фиг.4B, позволяя проксимальному концу 28a планки держателя зажимов 28 сжиматься, чтобы позволить планке 28 войти во внешнюю трубку 24. Когда толкатель 38 находится в крайнем дистальном положении (то есть когда спусковой крючок 16 находится по меньшей мере в частично закрытом положении), выступ 39 будет находиться в промежуточном положении относительно зубцов 31, как показано на Фиг.4C, и будет блокировать сжатие проксимального конца 28a планки держателя зажимов 28. Такое расположение особенно удобно в процессе использования устройства, поскольку выступ 39 будет предотвращать случайное отсоединение планки держателя зажимов 28 от наружной трубки 24. Хотя на Фиг.4A-4C показан выступ 39, имеющий в поперечном сечении прямоугольную форму с закругленными углами, выступ 39 может также иметь другие формы и размеры. Например, как показано на Фиг.4D и 4E, выступ 39' имеет форму поперечного сечения, приближенную к треугольной, в которой конусообразный конец должен входить между зубцами 31, дополнительно гарантируя, что проксимальный конец 28a планки держателя зажимов 28 не сожмется в процессе использования устройства. Также возможно использование нескольких выступов. Например, на Фиг.4F-4H представлен другой вариант осуществления, в котором на проксимальном конце 38a' толкателя 38 предусмотрены два выступа 39a и 39b, расположенные на некотором расстоянии друг от друга. Такие два выступа 39a и 39b будут предотвращать сжатие проксимального конца 28a планки держателя зажимов 28, когда толкатель 38 находится в крайнем проксимальном положении, как показано на Фиг.4F, и когда толкатель 38 находится в крайнем дистальном положении, как показано на Фиг.4H. Сжатие проксимального конца 28a планки держателя зажимов 28 возможно только когда толкатель 38 находится в промежуточном положении, а зубцы 31 находятся между выступами 39a и 39b, как показано на Фиг.4G.
Как было указано выше, на толкателе 38 также может быть предусмотрен один или несколько фиксаторов 84, предназначенных для зацепления нижнего хвостовика 82b на подающем лотке 34. Количество фиксаторов 84 может быть разным, но в одном примере осуществления количество фиксаторов 84 на толкателе равно или превышает количество клипс, загружаемых в устройство 10, более предпочтительно, чтобы количество фиксаторов 84 на единицу превышало количество клипс, которое может быть загружено в устройство 10. В примере, не ограничивающем настоящее изобретение, в толкателе 38 может быть предусмотрено восемнадцать фиксаторов 84 для продвижения семнадцати клипс, загруженных в канал для клипс 30. Такая конфигурация позволяет толкателю 38 продвигать вперед подающий лоток 34 семнадцать раз и, соответственно, подавать в зажимы 20 семнадцать клипс для наложения. Фиксаторы 84 также предпочтительно располагаются на одинаковом расстоянии друг от друга, чтобы подающий лоток 34 зацеплялся и продвигался толкателем 38 при каждом продвижении толкателя 38.
Толкатель 38 также может иметь деталь, управляющую перемещением толкателя 38 относительно канала для клипс 30. Такая конфигурация будет способствовать тому, чтобы подающий лоток 34 продвигался на установленное расстояние при каждом нажатии на спусковой крючок 16, подавая, таким образом, только одну клипсу в зажимы 20. Хотя для управления перемещением толкателя 38 в дистальном направлении могут использоваться разные методики, в одном примере осуществления на толкателе 38 может быть предусмотрен выступ 86, выполненный с возможностью введения в соответствующую прорезь 88 (Фиг.2B) в планке держателя зажимов 28. Длина прорези 88 позволяет ограничивать перемещение в ней выступа 86 и, следовательно, перемещение толкателя 38. Таким образом, в процессе использования толкатель 38 может перемещаться между фиксированным проксимальным положением и фиксированным дистальным положением относительно канала для клипс 30, что позволяет толкателю 38 продвигать подающий лоток 34 на заданное расстояние при каждом продвижении.
На Фиг.5A представлен один пример осуществления механизма продвижения 40, выполненного с возможностью присоединения к дистальному концу 38b толкателя 38 и способного подавать крайнюю дистальную клипсу из канала для клипс 30 в зажимы 20. Для присоединения механизма продвижения 40 к толкателю 38 могут использоваться различные методики, но в проиллюстрированном варианте осуществления проксимальный конец 40a механизма продвижения 40 имеет форму гнезда, в которое вставляется штекер, расположенный на дистальном конце 38b толкателя 38. Предпочтительно механизм продвижения 40 соединяется с толкателем 38 неподвижным соединением, однако, как вариант, он может являться частью толкателя 38. Предпочтительно дистальный конец 40b толкателя 38 выполнен с возможностью продвижения клипсы в зажимы 20 и, следовательно, на дистальном конце 40b механизма продвижения 40 может быть предусмотрен, например, выталкиватель клипсы 90. Выталкиватель клипсы 90 может иметь различные формы и размеры, но в одном примере осуществления он имеет удлиненную форму с выемкой 92 на дистальном конце, предназначенной для установки на изгиб клипсы. Форма выемки 92 может быть разной, в зависимости от конфигурации клипсы. Выталкиватель клипсы 90 также может отходить под углом вверх по отношению к продольной оси А механизма продвижения 40. Такая конфигурация позволяет выталкивателю клипс 90 входить в канал для клипс 30 и зацеплять клипсу, в то время как оставшаяся часть механизма продвижения 40 будет располагаться преимущественно параллельно каналу для клипс 30.
На Фиг.5B представлен другой пример осуществления выталкивателя клипс 90' механизма продвижения 40'. В данном варианте осуществления выталкиватель клипс 90' является несколько более узким и имеет небольшую выемку 92' на дистальном конце. В процессе использования механизм продвижения 40 может зацеплять и продвигать в зажимы 20 только крайнюю дистальную клипсу в канале для клипс 30. Это обусловлено положением толкателя 38, который может перемещаться между фиксированным проксимальным и фиксированным дистальным положениями, как указано выше.
На Фиг.5C и 5D представлен другой пример осуществления выталкивателя клипс или дистальной головки 90” механизма продвижения 40”. В данном варианте осуществления выталкиватель клипс или дистальная головка 90” была изменена так, чтобы вершина хирургической клипсы, подаваемой в зажимы, могла перемещаться вверх или вниз и при этом сохранялся контакт выталкивателя с вершиной хирургической клипсы. Как правило, дистальная головка 90” имеет вытянутую форму, а ее проксимальный конец 90p” соединен с частью корпуса или пластиной 42” механизма продвижения 40”. Пластина 42” может иметь различные формы и размеры, но в представленном варианте осуществления пластина 42” имеет в целом плоскую форму с верхней и нижней поверхностями 42s” и 42i”. Данная конфигурация пластины 42”, за исключением дистальной головки 90”, может быть аналогичной ранее описанным в настоящем документе вариантам осуществления. В одном варианте осуществления дистальная головка 90” и пластина 42” могут быть выполнены в виде одной детали, однако каждый из компонентов может быть изготовлен из разных материалов. Например, дистальная головка 90” может быть изготовлена из металла, а вся пластина 42” или часть пластины 42” может быть изготовлена из пластика, являющегося единым целым с толкателем 38, и напрессовываться на металлическую дистальную головку 90”. Независимо от используемого материала, дистальная головка 90” предпочтительно изготавливается из гибкого материала, позволяющего головке 90” отклоняться вверх или вниз относительно пластины 42”. В некоторых примерах осуществления дистальная головка 90” может быть изготовлена путем формирования выреза определенной формы в плоском листе металла с последующим загибанием противоположных сторон в направлении друг к другу с получением показанной головки с пустотелой внутренней частью.
Как указано выше, дистальная головка 90” может быть выполнена с возможностью перемещения вершины подаваемой в зажимы хирургической клипсы вверх или вниз при сохранении контакта между головкой и вершиной клипсы. Иными словами, высота дистальной головки 90”, измеряемая от верха до низа (то есть перпендикулярно продольной оси механизма продвижения 40”), может превышать высоту вершины клипсы. Это позволяет вершине клипсы перемещаться вверх или вниз вместе с головкой. В частности, как показано на Фиг.5D, дистальная наружная поверхность 41 выталкивателя клипсы 90” может иметь высоту H, измеряемую от верха до низа, которая превышает измеряемую в этом же направлении высоту вершины клипсы, подаваемой выталкивателем клипсы 90”, как более подробно описано ниже. Прирост высоты может обеспечивать дистальная наклонная поверхность 43, расположенная на нижней поверхности головки 90' смежно с дистальным концом 90d” головки 90”. Дистальная наклонная поверхность 43 может быть выполнена в виде наклонного участка или поверхностной детали. Как изображено на Фиг.5C и 5D, дистальная головка 90” также может иметь проксимальную наклонную поверхность 45, расположенную на нижней поверхности головки 90” и смежно с проксимальным концом 90p” головки 90”. Две наклонные поверхности 43 и 45 могут быть выполнены с возможностью взаимодействия с тканевым упором, как более подробно описано ниже, и, таким образом, с возможностью отклонения вверх или вниз относительно тканевого упора. С целью упрощения многократного сгибания дистальной головки 90” для ее изготовления может использоваться гибкий или упругий материал. Как дополнительно показано на Фиг.5C и 5D, верхняя часть 47 выталкивателя клипсы 90” может быть преимущественно прямой и может отходить под углом вверх между проксимальным концом 90p” головки 90” и дистальным концом 90d” головки 90”. Специалисту в данной области будет понятно, что конкретная конфигурация дистальной головки 90” может зависеть от предпочтительного типа перемещения головки в процессе использования.
На Фиг.6A-6G показан узел механизма продвижения клипс в процессе использования. В частности, на Фиг.6A-6D показано движение толкателя 38 в канале для клипс 30 с перемещением подающего лотка 34 и комплекта клипс 36, а на Фиг.6E-6F показано движение механизма продвижения 40 с продвижением крайней дистальной клипсы в зажимы 20. Компоненты корпуса 12, которые используются для приведения в действие узла механизма продвижения клипс, будут рассмотрены ниже более подробно.
Как показано на Фиг.6A, в состоянии покоя толкатель 38 находится в крайнем проксимальном положении, а выступ 86 находится с проксимальной стороны в удлиненной прорези 88 планки держателя зажимов 28. Подающий лоток 34 находится в канале для клипс 30, и при условии что устройство 10 еще не использовалось, подающий лоток 34 находится в крайнем проксимальном положении, так что верхний хвостовик 82a на подающем лотке 34 находится в зацеплении с крайним проксимальным или первым отверстием 30c1 в канале для клипс 30. Таким образом предотвращается движение подающего лотка 34 в проксимальном направлении, а нижний хвостовик 82b на подающем лотке 34 располагается между первым фиксатором 841 и вторым фиксатором 842 на толкателе 38 так, что нижний хвостовик 82b отклоняется толкателем 38 вверх. Фиксаторы 84 в толкателе последовательно обозначены номерами 841, 842 и т.д., а отверстия 30c в канале для клипс 30 последовательно обозначены номерами 30c1, 30c2 и т.д. Как показано на Фиг.6A, комплект клипс 36, последовательно обозначенных номерами 361, 362... 36x, где 36x - крайняя дистальная клипса, которая находится в канале для клипс 30 дистально относительно подающего лотка 34.
При нажатии на спусковой крючок 16 толкатель 38 подается в дистальном направлении, в результате чего выступ 86 скользит в дистальном направлении в прорези 88. При дистальном перемещении толкателя 38 нижний хвостовик 82b подающего лотка 34 заходит в первый фиксатор 841 в толкателе 38. При дальнейшем дистальном перемещении толкателя 38 первый фиксатор 841 зацепляет нижний хвостовик 82b, как показано на Фиг.6B, и перемещает подающий лоток 34 и комплект клипс 361, 362 и т.д. в дистальном направлении. Как показано на Фиг.6C, когда выступ 86 упирается в дистальный конец удлиненной прорези 88 в планке держателя зажимов 28, дальнейшее дистальное перемещение толкателя 38 блокируется. В данном положении подающий лоток 34 прошел заданное расстояние и подтолкнул комплект клипс 361, 362... 36x в канал для клипс 30 на заданное расстояние. Верхний хвостовик 82a подающего лотка 34 вошел во второе отверстие 30c2 канала для клипс 30 и заблокировал проксимальное движение подающего лотка 34, а нижний хвостовик 82b подающего лотка 34 остается в зацеплении с первым фиксатором 841 толкателя 38.
При перемещении толкателя 38 из исходного крайнего проксимального положения, изображенного на Фиг.6A, в конечное крайнее дистальное положение, изображенное на Фиг.6C, также в зажимы 20 подается крайняя дистальная клипса 36x. В частности, как показано на Фиг.6E, дистальное перемещение толкателя 38 приводит к тому, что выталкиватель клипсы 90 механизма продвижения 40, закрепленного на дистальном конце толкателя 38, зацепляет крайнюю дистальную клипсу 36x в канале для клипс 30 и подает эту клипсу 36x в зажимы 20, как показано на Фиг.6F. В одном примере осуществления механизм продвижения 40 зацепляет и выталкивает крайнюю дистальную клипсу 36x до зацепления и начала перемещения подающего лотка 34. В результате этого крайняя дистальная клипса 36x проходит расстояние больше, чем расстояние, которое проходит подающий лоток 34. Такая конфигурация позволяет подавать в зажимы 20 только крайнюю дистальную клипсу 36x, избегая случайного продвижения дополнительной клипсы.
После того, как клипсе 36x была полностью или частично придана нужная форма, спусковой крючок 16 можно отпустить и освободить сформированную клипсу 36x. При отпускании спускового крючка 16 толкатель 38 оттягивается в проксимальное направление до тех пор, пока выступ 86 не вернется в исходное крайнее проксимальное положение в удлиненной прорези 88, как показано на Фиг.6D. При оттягивании толкателя 38 в проксимальном направлении подающий лоток 34 не двигается в проксимальном направлении, поскольку верхний хвостовик 82a зацепляется за второе отверстие 30c2 в канале для клипс 30. Нижний хвостовик 82b не мешает проксимальному движению толкателя 38, и как только толкатель 38 оказывается в исходном крайнем проксимальном положении, как показано на фигуре, нижний хвостовик 82b находится между вторым фиксатором 842 и третьим фиксатором 843 толкателя 38.
Процесс можно повторить для продвижения другой клипсы в зажимы 20. При каждом нажатии на спусковой крючок 16 нижний хвостовик 82b входит в зацепление со следующим фиксатором, то есть фиксатором 842 на толкателе 38, верхний хвостовик 82a на подающем лотке 34 перемещается в дистальном направлении к следующему отверстию, то есть отверстию 30c3 в канале для клипс 30, а крайняя дистальная клипса подается в зажимы 20, после чего ее отпускают. Если устройство 10 содержит заданное количество клипс, например, семнадцать клипс, спусковой крючок можно нажать семнадцать раз. После наложения последней клипсы, упор, например, третий хвостовик 82c на подающем лотке 34, входит в зацепление со стопорным хвостовиком 118 в канале для клипс 30 и блокирует подающий лоток 34.
Подающий лоток 34, толкатель 38 и (или) канал для клипс 30 также могут, при необходимости, включать детали, предотвращающие случайное или непреднамеренное движение подающего лотка 34, например, в процессе транспортировки устройства. Это особенно полезно, так как смещение подающего лотка 34, в особенности перед первым использованием устройства, может привести к неправильной работе устройства. Например, если произойдет смещение подающего лотка 34 в дистальном направлении, лоток 34 будет подавать в зажимы две клипсы одновременно, в результате чего будут накладываться две клипсы неправильной формы. Следовательно, в одном варианте осуществления подающий лоток 34, толкатель 38 и (или) канал для клипс 30 может содержать фиксирующий механизм и (или) может быть выполнен с возможностью создания фрикционного сопротивления между ними, достаточного для препятствия движению, но которое можно преодолеть нажатием на спусковой крючок 16, которое позволит толкателю переместить подающий лоток 34 по каналу для клипс 30.
Несмотря на то, что для предотвращения нежелательного смещения подающего лотка 34 в канале для клипс 30 можно использовать различные методики, на Фиг.27A-29C представлены разные варианты осуществления способов создания фрикционного сопротивления и (или) механизма зацепления между подающим лотком 34, толкателем 38 и (или) каналом для клипс 30. Как показано на Фиг.27A, в одном примере осуществления показан подающий лоток 34', который имеет в свободном состоянии (то есть когда подающий лоток 34' извлечен из канала для клипс 30) консольную или выгнутую конфигурацию, в результате чего подающий лоток 34' при установке в канал для клипс образует консольную пружину. В частности, часть подающего лотка 34' может иметь изгиб 35', в результате чего противолежащие концы 34a' и 34b' подающего лотка 34' располагаются под углом друг к другу. Наличие изгиба 35' может привести к тому, что высота hb подающего лотка 34' станет больше высоты канала для клипс 30. Несмотря на то что высота hb может быть различной, в одном примере осуществления изгиб 35' выполняется таким образом, чтобы увеличить высоту подающего лотка 34' на величину, достаточную для создания фрикционной силы сопротивления между подающим лотком 34' и каналом для клипс 30, но при этом позволяющую подающему лотку 34' двигаться в канале для клипс 30 при нажатии на спусковой крючок 16. В одном примере осуществления высота подающего лотка 34' увеличивается по меньшей мере приблизительно на 30% или - более предпочтительно - приблизительно на 40%. В процессе использования канал для клипс 30 будет оказывать на подающий лоток 34' давление, придающее этому лотку по существу плоскую форму так, что подающий лоток 34' при движении в канале для клипс 30 будет изгибаться в соответствии с формой канала. Таким образом, изгиб 35' подающего лотка 34', а также концы 34a' и 34b' подающего лотка 34' будут оказывать давление на канал для клипс 30, создавая фрикционное сопротивление между подающим лотком 34' и каналом для клипс 30. Такое фрикционное сопротивление будет препятствовать смещению подающего лотка 34' относительно канала для клипс 30 до тех пор, пока не будет нажат спусковой крючок 16 - в этом случае усилие, создаваемое спусковым крючком 16, преодолевает фрикционное сопротивление.
Специалисту в данной области будет понятно, что изгиб 35' может иметь различные конфигурации и может находиться в любом месте подающего лотка 34' по его длине. На Фиг.27A изгиб 35' выполнен в середине или рядом с серединой подающего лотка 34'. Изгиб 35' также может отходить в различных направлениях. Несмотря на то, что на Фиг.27A показан изгиб 35', отходящий в направлении, перпендикулярном оси, так, что изгиб 35' и концы 34a' и 34b' оказывают давление на канал для клипс 30, в качестве альтернативы изгиб 35' может располагаться по продольной оси подающего лотка 34' так, что подающий лоток 34' может оказывать давление на противолежащие боковые направляющие 80a и 80b (Фиг.2D) канала для клипс 30. Изгиб 35' также может располагаться под углом вниз к противолежащим концам 34a' и 34b', как показано на Фиг.27A, так, что подающий лоток 34' будет иметь преимущественно А-образную форму, или в другом варианте изгиб может располагаться под углом вверх к противолежащим концам 34a' и 34b', как показано на Фиг.27B, так, что подающий лоток 34' будет иметь по существу V-образную форму. Подающий лоток 34' также может иметь любое количество изгибов. Специалисту в данной области будет понятно, что конкретную конфигурацию изгиба(-ов) можно изменять в зависимости от характеристик подающего лотка 34' и канала для клипс 30, чтобы между ними возникало достаточное фрикционное сопротивление.
На Фиг.28A и 28B представлен другой вариант осуществления методики создания фрикционного сопротивления между подающим лотком и каналом для клипс. В данном варианте осуществления на поверхности канала для клипс 30' и (или) подающего лотка 34x могут присутствовать один или несколько выступов. Как показано на Фиг.28A, в канале для клипс 30' могут находиться два поверхностных выступа 82d1 и 82d2. Несмотря на то что поверхностные выступы 82d1 и 82d2 могут находиться в разных местах канала для клипс 30', в том числе внутри противолежащих боковых направляющих, по всей длине канала для клипс 30' или на разных участках подающего лотка 34x, в проиллюстрированном варианте осуществления выступы 82d1 и 82d2 находятся смежно с проксимальным концом канала для клипс 30', и их расположение предотвращает первичное смещение подающего лотка устройства до использования, например, во время транспортировки. Размер выступов 82d1 и 82d2 может зависеть от величины фрикционного сопротивления, необходимого для предотвращения случайного смещения подающего лотка 34x.
Несмотря на то, что выступы 82d1 и 82d2 могут быть выполнены с возможностью создания фрикционного сопротивления, достаточного для предотвращения случайного смещения подающего лотка 34x, подающий лоток 34x и (или) канал для клипс 30' могут дополнительно включать деталь, выполненную с возможностью входить в зацепление с соответствующими выступами на поверхности. На Фиг.28B представлены противолежащие хвостовики 82e1 и 82e2, расположенные на дистальной части подающего лотка 34x и предназначенные для зацепления выступов 82d1 и 82d2 в канале для клипс 30'. Хвостовики 82e1 и 82e2 могут иметь различную форму и размер и могут содержать язычок или иной выступ, предназначенный для зацепления или захвата выступов 82d1 и 82d2. Как показано на Фиг.28B, хвостовики 82e1 и 82e2 отходят в направлении друг друга от противолежащих боковых стенок подающего лотка 34x.
На Фиг.29A-29C представлен другой вариант осуществления методики предотвращения случайного смещения подающего лотка. В данном варианте осуществления сила трения образуется между подающим лотком и толкателем. В частности, подающий лоток 34y имеет хвостовик 82f с язычком 82g на поверхности, как показано на Фиг.29A, а в толкателе 38y выполнен соответствующий паз 84y. В процессе использования, как показано на Фиг.29C, язычок 82g должен входить в зацепление с пазом 84y и предотвращать случайное смещение подающего лотка 34y. Однако язычок 82g и паз 84y выполнены так, что допускают движение подающего лотка 34y, если к подающему лотку 34y с помощью спускового крючка 16 приложена достаточная сила.
Специалисту в данной области будет понятно, что для предотвращения случайного смещения подающего лотка или другого механизма продвижения клипс в канале для клипс могут использоваться различные методики и что может использоваться любое сочетание деталей, расположенных в разных местах одного или обоих компонентов.
На Фиг.7-9 представлены различные примеры компонентов узла формирования клипс. На Фиг.7 представлен пример осуществления зажимов 20. Как указано выше, зажимы 20 могут иметь проксимальную часть 20a с зубцами 94, предназначенными для соединения с соответствующими зубцами 78 на планке держателя зажимов 28. Однако для соединения зажимов 20 с планкой держателя зажимов 28 могут использоваться и другие методики. Например, могут применяться соединения типа «ласточкин хвост», штекерное соединение и т.д. В другом варианте осуществления настоящего изобретения зажимы 20 могут быть единым целым с планкой держателя 28. Дистальная часть 20b зажимов 20 может быть выполнена с возможностью введения между ними клипсы. Следовательно, дистальная часть 20b может иметь первый и второй противолежащие зажимы 96a и 96b, которые могут двигаться относительно друг друга. В одном примере осуществления зажимы 96a и 96b могут находиться в открытом положении, и для их сведения требуется приложить усилие. Каждый из зажимов 96a и 96b может иметь паз (показан только паз 97), который находится на противолежащих внутренних поверхностях зажимов и предназначен для совмещения ножек клипсы с зажимами 96a и 96b. Каждый из зажимов 96a и 96b также может иметь кулачковую поверхность 98a и 98b, с помощью которой кулачковая планка 42 может зацеплять зажимы 96a и 96b и перемещать их относительно друг друга. В одном примере осуществления кулачковые поверхности 98a и 98b находятся на верхней поверхности зажимов 96a и 96b.
На Фиг.8 представлен пример осуществления кулачковой планки 42, предназначенной для подвижного соединения и зацепления зажимов 96 и 96b. Кулачковая планка 42 может иметь различные конфигурации, но в представленном варианте осуществления она имеет проксимальный конец 42a, который выполнен с возможностью соединения со стержнем толкателя 44, который более подробно описан ниже, и дистальный конец 42b, который выполнен с возможностью зацепления зажимов 96a и 96b. Для соединения кулачковой планки 42 со стержнем толкателя 44 могут использоваться различные методики, но в проиллюстрированном примере осуществления кулачковая планка 42 имеет гнездовой или шпоночный вырез 100, выполненный с возможностью введения штекера или шпонки 102, расположенной на дистальном конце 44b стержня толкателя 44. Штекер 102 показан более подробно на Фиг.9, где представлен стержень толкателя 44. Как показано, штекер 102 имеет форму, соответствующую форме выреза 100, что позволяет совместить детали 42 и 44. Специалисту в данной области будет понятно, что кулачковая планка 42 и стержень толкателя 44 при необходимости могут являться единым целым. Проксимальный конец 44a стержня толкателя 44 может быть выполнен с возможностью соединения с узлом замыкающего звена, который более подробно описан ниже, предназначенным для перемещения стержня толкателя 44 и кулачковой планки 42 относительно зажимов 20.
Как дополнительно показано на Фиг.8, на кулачковой планке 42 также может быть предусмотрен выступ 42c, выполненный с возможностью подвижного введения в удлиненную прорезь 20c в зажимах 20. В процессе использования выступ 42c и прорезь 20c образуют проксимальный упор узла формирования клипсы.
Как показано на Фиг.8, дистальный конец 42b кулачковой планки 42 может быть выполнен с возможностью зацепления зажимов 96a и 96b. Несмотря на то что могут использоваться различные методики, в проиллюстрированном примере осуществления на дистальном конце 42b планки есть кулачковый канал или сужающаяся выемка 104, в которую входят кулачковые поверхности 98a и 98b зажимов 96a и 96b. В процессе использования, как показано на Фиг.10A и 10B, кулачковая планка 42 может перемещаться из проксимального положения, в котором между зажимами 96a и 96b есть некоторое расстояние, в дистальное положение, в котором зажимы 96a и 96b располагаются вплотную друг к другу и находятся в закрытом положении. При перемещении кулачковой планки 42 поверх зажимов 96a и 96b сужающаяся выемка 104 будет прижимать зажимы 96a и 96b друг к другу, обжимая клипсу между ними.
Как указано выше, хирургический клипсонакладыватель 10 также может содержать тканевый упор 46, упрощающий размещение ткани между зажимами 20 в операционном поле. На Фиг.11A представлен один пример осуществления тканевого упора 46, имеющего проксимальный и дистальный концы 46a и 46b. Проксимальный конец 46a может быть выполнен с возможностью соединения с дистальным концом канала для клипс 30, чтобы тканевый упор 46 прилегал к зажимам. Однако тканевый упор 46 может являться единым целым с каналом для клипс 30 или он может быть выполнен с возможностью соединения или может являться единым целым с другими компонентами ствола 18. Дистальный конец 46b тканевого упора 46 может иметь форму, выполненную с возможностью наложения на сосуд, канал, наложения анастомоза и т.д. для размещения и выравнивания зажимов 20 относительно целевого участка в операционном поле. Как показано на Фиг.11A, дистальный конец 46b тканевого упора 46 имеет преимущественно v-образную форму. Дистальный конец 46b также может иметь изогнутую конфигурацию, упрощающую введение устройства через троакар или другое трубчатое устройство доступа.
Тканевый упор или другие компоненты устройства также могут при необходимости включать детали, поддерживающие и стабилизирующие клипсу в процессе формирования. В процессе формирования клипсы между зажимов она может повернуться, и ее ориентация может стать неправильной. В частности, при закрывании зажимов концы ножек клипсы будут двигаться в направлении друг к другу. В результате этого зажимы будут удерживать только изогнутую часть каждой ножки, а концы ножек и вершина клипсы могут отклоняться относительно зажимов, то есть поворачиваться относительно зажимов в вертикальном направлении. Дальнейшее закрытие зажимов может привести к получению клипсы неправильной формы. Следовательно, устройство может включать детали, предназначенные для выравнивания и направления клипсы в зажимы, а также для предотвращения вращения или иного неправильного изменения ориентации в процессе формирования клипсы.
Несмотря на то что такая выравнивающая деталь может иметь различные конфигурации и может присутствовать на разных компонентах устройства, на Фиг.11A показан центральный хвостовик 47, расположенный в центральной части дистального конца 46b тканевого упора 46 и предназначенный для удержания клипсы в определенном положении относительно узла механизма продвижения 40. В частности, вершина клипсы может двигаться по центральному хвостовику 47, предотвращая таким образом изменение ориентации клипсы относительно узла механизма продвижения 40, который толкает клипсу в дистальном направлении. Специалисту в данной области будет понятно, что тканевый упор 46 может иметь различные конфигурации и может содержать различные детали, упрощающие движение клипсы по нему.
На Фиг.12A показан тканевый упор 46 в действии. Как показано, тканевый упор 46 располагается непосредственно за зажимами 20 таким образом, что сосуд, канал, анастомоз и т.д. свободно входит между зажимами 20. Как дополнительно показано, хирургическая клипса 36 размещается между зажимами 20 так, что изгиб 36a клипсы 36 находится на одной оси с тканевым упором 46. Это позволяет разместить ножки 36b клипсы 36 вокруг сосуда, канала, анастомоза или другого целевого участка.
На Фиг.11B-11D представлен другой пример осуществления тканевого упора 46' с приспособлением для выравнивания или направляющим элементом, предназначенным для выравнивания или направления клипсы в зажимы, более предпочтительно - для размещения клипсы на одном уровне с зажимами в процессе формирования клипсы. В этом варианте осуществления изобретения приспособление для выравнивания выполнено в виде наклонного элемента 47', проходящего вдоль центральной оси тканевого упора 46' и выступающего над верхней поверхностью тканевого упора 46'. Наклонный элемент 47' предпочтительно имеет жесткую конфигурацию и увеличивается по высоте от проксимального конца 46a' к дистальному концу 46b' тканевого упора 46'. Угол может варьироваться в зависимости от угла расположения зажимов. Наклонный элемент 47' предпочтительно оканчивается проксимально относительно вмещающей ткани выемки 46c', предусмотренной на дистальной головке тканевого упора 46'. Таким образом, наклонный элемент 47' размещается проксимально относительно зажимов 20, при этом наклонный элемент 47' направляет клипсу и конец узла механизма продвижения 40, проталкивающего клипсу в направлении зажимов 20 под соответствующим углом. На практике наклонный элемент 47' может упираться торцом в нижнюю поверхность вершины клипсы, расположенной между зажимами 20, препятствуя вертикальному вращению клипсы во время закрытия зажимов 20 для формирования клипсы. В частности, при перемещении узла механизма продвижения 40 в крайнее дистальное положение вдоль наклонного элемента 47' вершина клипсы будет упираться в поверхность наклонного элемента 47'. По мере сжатия клипсы зажимами 20 ножки клипсы приближаются друг к другу, при этом зажимы 20 воздействуют только на изогнутую часть каждой ножки. В результате этого ножки и вершина клипсы могут свободно вращаться по вертикали. Однако поскольку вершина прижимается к верхней поверхности 47a' наклонного элемента 47', наклонный элемент 47' препятствует вертикальному перемещению вершины сверху вниз или в направлении вниз, препятствуя вертикальному перемещению ножек клипсы снизу вверх или в направлении вверх, то есть наклонный элемент 47' препятствует качанию клипсы между зажимами 20. Таким образом, наклонный элемент 47' эффективно препятствует или ограничивает нежелательные силы вращения, возникающие при закрытии зажимов 20 при формировании клипсы. При этом клипса остается на одном уровне с зажимами 20.
Специалисту в данной области будет понятно, что форма, размер и конфигурация наклонного элемента могут изменяться в зависимости от конфигурации зажимов и других элементов клипсонакладывателя. В одном примере осуществления максимальная высота наклонного элемента 47' hRmax составляет приблизительно 0,0635 см (0,025 дюйма) при измерении от центральной плоскости, проходящей через тканевый упор 46'. В более предпочтительном варианте высота hRmax находится в пределах приблизительно от 0,0203 см (0,008 дюймов) до 0,0508 см (0,020 дюймов), а наиболее предпочтительно высота hRmax находится в пределах приблизительно от 0,0254 см (0,010 дюйма) до 0,0381 см (0,015 дюйма). Угол наклона αR наклонного элемента 47' также может изменяться, однако в одном примере осуществления наклонный элемент 47' имеет угол наклона αR, который находится в пределах приблизительно от 5 до 45°, более предпочтительно - от 5 до 30°, а в наиболее предпочтительном варианте - от 10 до 20°. Ширина wr наклонного элемента 47' также может изменяться, однако в одном примере осуществления ширина наклонного элемента 47' wr предпочтительно немного меньше расстояния между зажимами 20 в полностью закрытом положении.
На Фиг.11E и 11F представлен другой пример осуществления тканевого упора 46”, имеющего проксимальный и дистальный концы 46a” и 46b”. Проксимальный конец 46a” может стыковаться с дистальным концом канала для клипс 30, позволяя устанавливать тканевый упор 46” рядом с зажимами 20. В других вариантах осуществления изобретения тканевый упор 46” может являться единым целым с каналом для клипс 30 или он может стыковаться или являться единым целым с другими элементами ствола 18. Форма дистального конца 46b” тканевого упора 46” выполнена с возможностью приема сосуда, канала, анастомоза и т.д., устанавливая и выравнивая зажимы 20 относительно целевого участка. Например, тканевый упор 46” может иметь V-образную форму, определяемую по меньшей мере частично первой и второй лапками 39a и 39b.
В данном варианте осуществления тканевый упор 46', который также называется направляющим элементом или направляющей механизма продвижения, предназначен в частности для использования совместно с механизмом продвижения 40”, изображенным на Фиг.5C и 5D. В частности, тканевый упор 46” конструктивно разработан с возможностью приема головки механизма продвижения 90” с большей высотой, как указано выше. Как показано на Фиг.11E и 11F, тканевый упор 46” может иметь отверстие или канал 49, сформированный внутри него и позволяющий дистальной головке 90” механизма продвижения 40” смещаться в направлении вниз, то есть вовнутрь или через канал 49, при перемещении механизма продвижения 40” между проксимальным и дистальным положениями. Несмотря на то, что канал 49 может располагаться в любом месте тканевого упора 46”, в данном варианте осуществления канал 49 располагается в центре или проксимальном положении продольно вдоль тканевого упора 46”. Канал 49 также может располагаться в направляющем канале 46t, предусмотренном на верхней поверхности 46s тканевого упора 46”. 48
Таким образом, канал 49 располагается на расстоянии ниже верхней поверхности 46s. Направляющий канал 46t может быть выполнен в виде выемки, проходящей продольно вдоль большей части тканевого упора 46″, образуя таким образом противолежащие боковые направляющие 46r, проходящие продольно вдоль большей части тканевого упора 46″. Рельсовые направляющие 46r позволяют механизму продвижения 40″ скользить вдоль плоскости над каналом 49.
Кроме того, как показано на Фиг. 11Е и 11F, направляющий канал 46t может иметь скошенную или наклонную поверхность в области проксимального и дистального концов канала 49. Таким образом, канал 49 имеет дистальный наклон 51 и проксимальный наклон 53. Дистальный наклон 51 возрастает по высоте в направлении снизу вверх от проксимального к дистальному концу. Дистальный наклон 51 используется для смещения головки механизма продвижения 90″ в направлении вверх по мере перемещения механизма продвижения 40″ в дистальном направлении. Проксимальный наклон 53 возрастает по высоте в направлении снизу вверх от дистального к проксимальному концу. Проксимальный наклон 53 используется для смещения головки механизма продвижения 90″ в направлении вверх по мере перемещения механизма продвижения 40″ в проксимальном направлении.
Кроме того, как показано на Фиг. 11Е и 11F, тканевый упор 46″ также может иметь продольную канавку 55, расположенную дистально относительно канала 49 и рядом с дистальным концом. Канавка 55 может проходить по продольной оси тканевого упора 46″ по существу в центральном положении по боковой линии
между первой и второй лапками 39a и 39b и она может находиться по существу на одной линии с каналом 49. Таким образом, дистальная головка 90”, перемещаясь дистально вверх по дистальному наклону 51 и выходя из канала 49, может продолжать движение вдоль канавки 55, продвигая клипсу по тканевому упору 46”. Иными словами, канавка 55 по существу препятствует боковому смещению дистальной головки 90” к одной из противоположных боковых сторон тканевого упора 46”, удерживая головку 90” на одной линии с вершиной клипсы. В некоторых вариантах осуществления изобретения канавка 55 может находиться в углублении относительно верхней поверхности первой и второй лапок 39a и 39b, вмещая дистальную головку 90” с большей высотой H. Поскольку вершина клипсы преимущественно перемещается над тканевым упором 46”, это позволяет дистальной головке 90” с большей высотой H проходить как над вершиной клипсы, так и под ней.
Как указано выше, при выталкивании клипсы в зажимы 20 она должна переориентироваться так, чтобы адаптироваться к углу зажимов 20. В результате переориентации вершина клипсы может опуститься вертикально или развернуться вниз (в направлении вниз) относительно противолежащих ножек клипсы. Такое опущение является причиной некорректного расположения клипсы в зажимах 20. Например, в некоторых случаях вершина клипсы может опуститься ниже дистального конца выталкивателя клипсы. Таким образом, выталкиватель клипсы обходит клипсу и двигается над ее вершиной. В этом случае выталкиватель клипсы не может корректно разместить ее в зажимах 20. Выталкиватель клипсы 90” с высотой Н в варианте осуществления, представленном на Фиг.5C и 5D, в сочетании с канавкой 55 в тканевом упоре 46” в варианте осуществления, представленном на Фиг.11E и 11F, обеспечивает твердую поверхность, опираясь на которую вершиной, клипса может перемещаться при вращении в направлении вверх и (или) вниз. Если вершина клипсы опускается при ее выталкивании в зажимы 20, дистальная наружная поверхность 41 дистальной головки 90” обеспечивает твердую поверхность, проходящую вниз в углубленную канавку 55, препятствуя опусканию вершины клипсы ниже дистальной головки 90”. Таким образом, вершина клипсы не может опуститься ниже нижней части дистальной наружной поверхности 41, благодаря чему клипса не теряет контакт с дистальной головкой 90” и постоянно сохраняет правильное положение в зажимах 20.
На Фиг.12B-12E представлен пример взаимодействия между тканевым упором 46” и дистальной головкой 90”. На Фиг.12B представлена дистальная головка 90” непосредственно перед началом формирования клипсы. На фигуре показано, как дистальная головка 90” выталкивает крайнюю дистальную клипсу C в зажимы 20. Следующая клипса C1 может занять дистальное положение в канале для клипс 30. Как показано на фигуре, дистальная наружная поверхность 41 дистальной головки 90” упирается в вершину клипсы C и имеет высоту H, которая по существу больше высоты вершины. Дистальная наружная поверхность 41 дистальной головки 90” может двигаться в канавке 55 тканевого упора 46”, выталкивая клипсу C в зажимы 20. Таким образом, по мере того как ножки клипсы C незначительно разворачиваются вверх (в направлении вверх), чтобы войти в зажимы 20, вершина клипсы C постоянно упирается в дистальную наружную поверхность 41, даже если вершина разворачивается вниз в направлении нижней поверхности. Более конкретно, нижняя поверхность дистальной головки 90” контактирует с канавкой 55. Таким образом, вершина клипсы C не может опуститься ниже нижней поверхности дистальной головки 90”. Следовательно, дистальная наружная поверхность 41 обеспечивает постоянный контакт с вершиной клипсы C и правильное размещение клипсы C в зажимах 20. Дистальная наружная поверхность 41 также постоянно контактирует с вершиной клипсы C в процессе формирования клипсы C между зажимами 20, препятствуя смещению клипсы C в проксимальном направлении.
Как показано на Фиг.12C, после завершения формирования клипсы C между зажимами 20 и после ее выхода из зажима дистальная головка 90” начинает движение в проксимальном направлении из крайнего дистального положения в канавке 55, чтобы занять положение за следующей клипсой C1 или проксимально относительно нее. В этот момент формирования клипсы дистальная головка 90” находится в дистальном положении относительно следующей клипсы C1, а наивысшая точка верхней поверхности 47 дистальной головки 90” находится по существу на одной высоте с верхней поверхностью клипсы C1. Таким образом, при перемещении дистальной головки 90” в проксимальном направлении к клипсе C1 верхняя поверхность 47 дистальной головки 90” взаимодействует с нижней поверхностью вершины клипсы C1. Поскольку клипса C1 неподвижно удерживается в канале для клипс 30, клипса C1 прилагает направленное вниз усилие, действующее на дистальную головку 90” и отклоняющее гибкую дистальную головку 90” вниз. При взаимодействии клипсы C1 и верхней поверхности 47 дистальной головки 90” дистальная головка 90” перемещается в направлении дистального наклона 51. Таким образом, направленное вниз усилие, с которым воздействует клипса C1, заставляет дистальную головку 90” отклоняться в направлении вниз так, что дистально смещенная поверхность 43 дистальной головки 90” перемещается вниз по дистальному наклону 51 и входит или частично проходит через канал 49. При перемещении дистальной головки 90” в проксимальном направлении по каналу 49 его верхняя поверхность 47 находится ниже нижней поверхности вершины клипсы C1. Таким образом, она может свободно перемещаться в проксимальном направлении под нижней поверхностью вершины клипсы C1, как показано на Фиг.12D.
По мере перемещения дистальной головки 90” в проксимальном направлении в канале 49 дистальная наружная поверхность 41 перемещается проксимально относительно вершины клипсы C1. По мере ее перемещения в проксимальном направлении проксимально смещенная поверхность 45 контактирует с проксимальным наклоном 53 и начинает движение вверх по проксимальному наклону 53. Поскольку верхняя поверхность 47 дистальной головки 90” более не поддерживает контакт с нижней поверхностью клипсы C1, при движении проксимально смещенной поверхности 45 вверх по проксимальному наклону 53 дистальная головка 90” отклоняется назад в направлении вверх. Таким образом, в этом положении ее высота опять по существу равна высоте вершины клипсы C1, как показано на Фиг.12E. Теперь дистальная головка 90” находится в крайнем проксимальном положении и готова к началу нового цикла формирования клипсы. Таким образом, механизм продвижения 40” и, следовательно, дистальная головка 90” перемещаются в дистальном направлении, дистально смещенная поверхность 43 дистальной головки 90” перемещается в дистальном направлении вдоль дистального наклона 51, в результате чего дистальная головка 90” отклоняется вверх в направлении верхней поверхности, обеспечивая постоянный контакт между вершиной клипсы и дистальной наружной поверхностью 41 дистальной головки 90”.
На Фиг.13-26B представлены различные примеры внутренних элементов корпуса 12, предназначенных для управления продвижением и формированием клипсы. Как указано выше, хирургический клипсонакладыватель 10 может включать некоторые или все приспособления, описанные в настоящем документе, а также может включать другие приспособления, известные в данной области техники. В некоторых примерах осуществления внутренние элементы клипсонакладывателя 10 могут включать узел механизма продвижения клипс, который соединяется с узлом механизма продвижения клипс ствола 18, для продвижения по меньшей мере одной клипсы по удлиненному стволу 18 и размещения клипсы между зажимами 20, а также узел формирования клипс, которое соединяется с узлом формирования клипс ствола 18, для закрытия зажимов 20 для формирования частично или полностью закрытой клипсы. К другим примерам приспособлений относится противовозвратный механизм, позволяющий контролировать движение спускового крючка 16, механизм защиты от перегрузки, препятствующий воздействию избыточного усилия узла формирования клипс на зажимы 20, и индикатор количества клипс, показывающий количество клипс, оставшихся в устройстве 10.
На Фиг.13-16D представлен пример осуществления узла механизма продвижения клипс корпуса 12, который перемещает толкатель 38 в стволе 18. Как правило, узел механизма продвижения клипс может включать спусковой вкладыш 48, связанный со спусковым крючком 16, муфту толкателя 50, сопряженную с проксимальным концом 38a толкателя 38, и звено продвижения 52, расположенное между спусковым вкладышем 48 и муфтой толкателя 50 и предназначенное для передачи импульса движения от спускового вкладыша 48 к муфте толкателя 50.
На Фиг.14 более подробно проиллюстрирован спусковой вкладыш 48. Форма спускового вкладыша 48 зависит от других элементов корпуса 12, но в представленном варианте осуществления спусковой вкладыш 48 имеет центральную часть 48a, имеющую поворотное соединение с корпусом 12, и удлиненную часть 48b, связанную со спусковым крючком 16. Центральная часть 48a имеет сквозное отверстие 106, вмещающее ось, которая обеспечивает поворотное соединение спускового вкладыша 48 с корпусом 12. Центральная часть 48a также имеет первую выемку 108, предусмотренную в верхней части кромки и вмещающую часть звена продвижения 52. Первая выемка 108 предпочтительно имеет размер и форму, выбранные с возможностью приема части звена продвижения 52 так, чтобы звено продвижения 52 под действием силы вращалось, когда спусковой вкладыш 48 вращается в результате движения спускового крючка 16. Как показано на Фиг.14, первая выемка 108 имеет по существу удлиненную форму и включает по существу круглую часть, вмещающую ось, предусмотренную на проксимальном конце звена продвижения 52, как более подробно рассмотрено ниже в отношении Фиг.16. Спусковой вкладыш 48 также может включать вторую выемку 110, предусмотренную на обратной стороне кромки и вмещающую ролик замыкающего звена 54, соединенный со стержнем толкателя 44 для приведения в движение кулачковой планки 42, смыкающей зажимы 20, и храповый механизм 112, предусмотренный на нижней стороне кромки, сопряженный с предохранителем 60 и позволяющий управлять движением спускового крючка 16, как более подробно рассмотрено ниже.
Пример муфты толкателя 50 более подробно изображен на Фиг.15A и 15B. Она используется для соединения проксимального конца толкателя 38 с дистальным концом звена продвижения 52. Хотя для сопряжения муфты толкателя 50 с проксимальным концом 38a толкателя 38 можно использовать множество способов, в одном примере осуществления муфта толкателя 50 выполнена из двух частей 50a и 50b, соединенных друг с другом и удерживающих проксимальный конец 38a толкателя 38. Совмещенные части 50a и 50b определяют центральную ось 50c, имеющую по существу круглые фланцы 50d и 50e, образованные на противолежащих концах и формирующие выемку 50f между ними, которая вмещает дистальную часть звена продвижения 52. Центральная ось 50c определяет просвет 50g, вмещающий проксимальный конец 38a толкателя 38 и фиксирующий толкатель 38 по существу неподвижно относительно муфты толкателя 50. Однако муфта толкателя 50 может быть единым целым с толкателем 38 и иметь различную форму и размер для сопряжения со звеном продвижения 52.
На Фиг.16 показан пример звена продвижения 52, которое может быть использовано для сопряжения спускового вкладыша 48 с муфтой толкателя 52. Как правило, звено продвижения 52 может иметь по существу плоскую удлиненную форму с проксимальным и дистальным концами 52a и 52b. Проксимальный конец 52a устанавливается с возможностью свободного вращения в первую выемку 108 спускового вкладыша 48. Таким образом, как указано выше, он может включать ось 53 (Фиг.1B), проходящую через выемку. Ось 53 может свободно вращаться в первой выемке 108 спускового вкладыша 48, позволяя спусковому вкладышу 48 вращать звено продвижения 52. Дистальный конец 52b звена продвижения 52 соединяется с муфтой толкателя 50. Таким образом, в одном примере осуществления он включает противолежащие лапки 114a и 114b и образует отверстие 116 между ними, вмещающее центральную ось 50a муфты толкателя 50. Лапки 114a и 114b обеспечивают эффективное сцепление и движение муфты 50 при повороте звена продвижения 52 вокруг оси X. Ось X образуется там, где звено продвижения 52 соединяется с корпусом 12. Она может располагаться в любой точке на звене продвижения 52, но в проиллюстрированном примере осуществления она находится смежно с проксимальным концом 52a звена продвижения 52.
В одном примере осуществления звено продвижения 52 может иметь гибкую конфигурацию, что позволяет не калибровать узел механизма продвижения клипс и узел формирования клипс. В частности, звено продвижения 52 позволяет спусковому крючку 16 продолжать движение в направлении закрытия даже после достижения толкателем 38 и муфтой толкателя 50 крайнего дистального положения и обеспечивает некоторую свободу движения устройства формирования клипс и механизма продвижения клипс. Иными словами, спусковой крючок 16 является достаточно податливым для толкателя 38 в процессе приведения в действие спускового крючка.
Конкретная жесткость и прочность звена продвижения 52 может зависеть от конфигурации узла механизма продвижения клипс и узла формирования клипс, но в одном из примеров осуществления звено продвижения 52 обладает жесткостью в пределах от 13,13 до 19,26 кН/м (от 75 до 110 фунтов на дюйм), более предпочтительно - приблизительно 16,29 кН/м (93 фунта на дюйм) (при измерении на поверхности контакта между звеном 52 и муфтой толкателя 50), а прочностью - в пределах от 111 Н (25 фунтов) до 222 Н (50 фунтов), более предпочтительно - приблизительно 156 Н (35 фунтов). Звено продвижения 52 также может быть изготовлено из различных материалов, в том числе из различных полимеров, металлов и т.д. Примером материала может быть полиэфиримид, армированный стекловолокном, также допускается использование ряда армированных термопластов, в том числе армированные стекловолокном жидкокристаллические полимеры, армированные стекловолокном нейлоны и их армированные углеродистым волокном версии и аналогичные термопласты. Допускается использование армированных волокном термоотверждаемых полимеров, таких как термоотверждаемые полиэстеры. Звено продвижения 52 также может быть изготовлено из металла, такого как пружинная сталь, для получения желаемого сочетания ограниченной гибкости и управляемой прочности.
На Фиг.17A-17D представлен пример осуществления узла механизма продвижения клипс в процессе использования. На Фиг.17A показано исходное положение, в котором спусковой крючок 16 находится в открытом положении, муфта толкателя 50 и толкатель 38 находятся в крайнем проксимальном положении, а звено продвижения 52 располагается между спусковым вкладышем 48 и муфтой толкателя 50. Как указано ранее, в исходном открытом положении выступ 86 на толкателе 38 находится на проксимальном конце удлиненной прорези 88 в планке держателя зажимов 28. Первый смещающий элемент, например, пружина 120, соединен со спусковым вкладышем 48 и корпусом 12, чтобы удерживать спусковой вкладыш 48 и спусковой крючок 16 в открытом положении, а второй смещающий элемент, например, пружина 122, располагается между муфтой ствола 124, которая обеспечивает поворотное соединение ствола 18 с корпусом 12, и муфтой толкателя 50, чтобы удерживать муфту толкателя 50 и толкатель 38 в крайнем проксимальном положении.
При нажатии на спусковой крючок 16 и его перемещении в закрытое положение, то есть в направлении неподвижной рукоятки 14, для преодоления смещающих сил пружин 120 и 122 спусковой вкладыш 48 начинает вращаться в направлении против часовой стрелки, как показано на Фиг.17B. В результате этого звено продвижения 52 приводится в движение и начинает вращаться в направлении против часовой стрелки, перемещая таким образом муфту толкателя 50 и толкатель 38 в дистальном направлении. При этом выступ 86 на толкателе 38 перемещается дистально в пределах удлиненной прорези 88 в планке держателя зажимов 28, продвигая вперед подающий лоток 34 и клипсы 36 в канале для клипс. Пружина 120 размещается между корпусом и спусковым вкладышем 48, а пружина 122 находится в сжатом состоянии между муфтой толкателя 50 и муфтой ствола 124.
При последующем нажатии на спусковой крючок 16 и повороте спускового вкладыша 48 муфта толкателя 50 и толкатель 38 достигают крайнего дистального положения. В этом положении выступ 86 на толкателе 38 находится на дистальном конце прорези 88 в планке держателя зажимов 28, а клипса находится между зажимами 20, как указано выше. Пружина 122 полностью сжимается между муфтой ствола 124 и муфтой толкателя 50, а звено продвижения 52 изгибается, как показано на Фиг.17C и 17D. По мере изгибания звена продвижения 52, а более предпочтительно - после полного сгибания звена продвижения 52, приводится в действие узел формирования клипсы, который закрывает зажимы 20. Звено продвижения 52 остается в изогнутом положении на протяжении периода приведения в действие узла формирования клипсы, например, во время второго этапа действия, так что спусковой вкладыш 48 остается податливым к воздействию узла механизма продвижения клипс и, в частности, толкателя 38.
Пример узла формирования клипс корпуса 12 более подробно показан на Фиг.18-20. Как правило, узел формирования клипсы находится в корпусе 12 и обеспечивает перемещение стержня толкателя 44 и кулачковой планки 42 относительно зажимов 20, перемещая зажимы 20 в закрытое положение и таким образом загибая расположенную между ними клипсу. Хотя узел формирования клипсы может иметь различные конфигурации, представленный вариант осуществления узла формирования клипсы включает ролик замыкающего звена 54, подвижно соединенный со спусковым вкладышем 48, замыкающее звено 56, выполненное с возможностью соединения с роликом замыкающего звена 54, и сцепное устройство замыкающего звена 58, выполненное с возможностью соединения с замыкающим звеном 56 и стержнем толкателя 44.
На Фиг.18 более подробно показан ролик замыкающего звена 54. Как показано, ролик замыкающего звена 54 включает центральную ось 54a, имеющую по существу круглые фланцы 54b и 54c, образованные смежно с ее противоположными концами. Центральная ось 54a размещается во второй выемке 110 в спусковом вкладыше 48 так, что фланцы 54b и 54c находятся на противоположных сторонах спускового вкладыша 48. Центральная ось 54a сопрягается с противолежащими лапками 126a и 126b замыкающего звена 56, при этом лапки находятся на противоположных сторонах спускового вкладыша 48.
Пример осуществления замыкающего звена 56 более подробно показан на Фиг.19. Как показано, оно имеет противолежащие лапки 126a и 126b, расположенные на некотором расстоянии друг от друга. Каждая лапка 126a и 126b имеет проксимальный конец 128a и 128b, выполненный с возможностью сопряжения с центральной осью 54a ролика замыкающего звена 54, и дистальный конец 130a и 130b, выполненный с возможностью сопряжения со сцепным устройством замыкающего звена 58 и присоединения ролика замыкающего звена 54 и замыкающего звена 56 к стержню толкателя 44. В примере осуществления проксимальный конец 128a и 128b каждой лапки 126a и 126b выполнен с возможностью поворотного соединения с роликом замыкающего звена 54, для этого лапки 126a и 126b могут иметь, например, крючкообразные элементы 132a и 132b для сцепления с центральной осью 54a. Крючкообразные элементы 132a и 132b проходят в противоположных направлениях, обеспечивая надежное сцепление между замыкающим звеном 56 и роликом замыкающего звена 54. Дистальные концы 130a и 130b лапок 126a и 126b могут сопрягаться друг с другом и могут иметь просвет 134, выполненный с возможностью введения в него оси, обеспечивающей поворотное соединение замыкающего звена 56 со сцепным устройством замыкающего звена 58. Специалисту в данной области будет понятно, что существуют различные способы сопряжения замыкающего звена 56 с роликом замыкающего звена 54 и сцепным устройством замыкающего звена 58.
Пример сцепного устройства замыкающего звена 58 более подробно представлен на Фиг.20A. Как показано, он включает проксимальную часть 58a, имеющую две лапки 136a и 136b с просветами 138a и 138b, совпадающими с просветом 134 в замыкающем звене 56 и вмещающими ось, которая обеспечивает сопряжение двух элементов. Сцепное устройство замыкающего звена 58 также может включать дистальную часть 58b, выполненную с возможностью сопряжения с проксимальным концом 44a стержня толкателя 44 (Фиг.9). В примере осуществления сцепное устройство замыкающего звена 58 имеет выемку 59 (Фиг.20B и 20C), форма которой позволяет вводить в нее проксимальный конец 44a стержня толкателя 44. Дистальная часть 58b сцепного устройства замыкающего звена 58 также может иметь конфигурацию, позволяющую вводить в него часть муфты толкателя 50, когда спусковой крючок 16 находится в открытом положении. Специалисту в данной области будет понятно, что существует ряд способов сопряжения сцепного устройства замыкающего звена 58 со стержнем толкателя 44 и что сцепное устройство замыкающего звена 58 и стержень толкателя 44 в альтернативном варианте осуществления могут являться единым целым.
В других примерах осуществления между стержнем толкателя 44 и сцепным устройством замыкающего звена 58 может быть предусмотрено соединение с предварительным натягом для предотвращения случайного выходы клипсы из зажима, в частности, на ранних этапах закрытия, если пользователь уменьшает давление на спусковой крючок 16. В частности, несмотря на то что противовозвратный механизм, более подробно рассмотренный ниже, может препятствовать перемещению спускового крючка 16 в открытое положение до того, как спусковой крючок 16 достигнет заданного положения, противовозвратный механизм допускает незначительное смещение спускового крючка 16. Таким образом, в случае если пользователь уменьшает давление на спусковой крючок 16, в результате чего происходит незначительное смещение спускового крючка 16 в открытое положение, соединение с предварительным натягом обеспечит смещение стержня толкателя 44 в дистальном направлении, сохраняя стержень толкателя 44 по существу в фиксированном положении и позволяя сцепному устройству замыкающего звена 58 двигаться в проксимальном направлении до тех пор, пока не произойдет сцепление спускового крючка 16 с противовозвратным механизмом.
Несмотря на то, что соединение с предварительным натягом может иметь различные конфигурации и может располагаться в различных точках узла формирования клипсы, в одном примере осуществления соединение с предварительным натягом может быть выполнено в виде смещающего элемента, расположенного в выемке 59 и обеспечивающего смещение стержня толкателя 44 в дистальном направлении. Несмотря на то что допускается использование различных смещающих элементов, в варианте осуществления, представленном на Фиг.20B, смещающий элемент выполнен в виде консольной балки 61, размещенной между проксимальным концом 44a стержня толкателя 44 и задней стенкой выемки 59 и предназначенной для смещения стержня толкателя 44 в дистальном направлении. Консольная балка 61 может быть изготовлена из материала с эффектом запоминания формы, например, нитинола, что обеспечивает сгибание и уплощение консольной балки 61 под действием проксимально направленной силы. Балка 61 также может быть изготовлена из других материалов, например, пружинной стали или армированных полимеров. Кроме того, допускается использование нескольких балок. На Фиг.20C представлен другой вариант осуществления смещающего элемента, выполненного в виде катушки или пружины другого типа 63. Как показано, пружина 63 размещается между проксимальным концом 44a стержня толкателя 44 и задней стенкой выемки 59 и обеспечивает смещение стержня толкателя 44 в дистальном направлении. Пружина 63 сжимается под действием проксимально направленной силы. Специалисту в данной области будет понятно, что существуют различные смещающие элементы, которые могут быть использованы в таком устройстве, включая эластомерные элементы, работающие на сжатие.
Соединение с предварительным натягом в альтернативном варианте может включать приспособления, улучшающие работу консольной балки или пружины в процессе формирования клипсы. В варианте осуществления изобретения, показанном на Фиг.20B, нагрузка консольной балки 61 распределена преимущественно однородно в процессе сжатия консольной балки во время закрытия, однако на заключительных этапах закрытия нагрузка существенно возрастает. Это показано на Фиг.20D, на котором представлен график кривой нагрузки/смещения консольной балки 61, изображенной на Фиг.20B. Левая часть кривой отражает высоту консольной балки 61 без нагрузки, а правая часть кривой отражает точку, в которой консольная балка 61 полностью сжимается или уплощается. Верхняя кривая отражает силу, возникающую в результате сжатия консольной балки 61 во время стандартного хода на закрытие, при этом следует учитывать, что сила измеряется в свободном состоянии консольной балки 61, поскольку консольная балка 61 изначально находится в частично сжатом состоянии в сцепном устройстве замыкающего звена 58. Как показано, нагрузка по существу постоянная (за исключением нагрузки на начальных этапах сжатия) и лишь незначительно возрастает во время хода на закрытие по мере сжатия консольной балки 61. Однако нагрузка возрастает в значительной степени на заключительных этапах закрытия, когда консольная балка 61 полностью уплощается. Это происходит вследствие деформации консольной балки 61, что обеспечивает перенос нагрузки от концов консольной балки 61 вовнутрь. По мере деформации консольной балки 61 и переноса нагрузки вовнутрь эффективная длина консольной балки 61 уменьшается, в результате чего нагрузка возрастает. Во избежание этого соединение с предварительным натягом в альтернативном варианте может предусматривать приспособления, улучшающие работу консольной балки или пружины, и, в частности, поддерживающие по существу постоянную нагрузку в процессе формирования клипсы.
На Фиг.20E представлен один пример осуществления способа улучшения работы консольной балки или пружины. Как показано, выемка 59' в сцепном устройстве замыкающего звена 58' имеет два ребра 59a' и 59b', предусмотренных на задней поверхности. Ребра 59a' и 59b' размещаются под консольной балкой и за ней (не показаны). Ребра 59a' и 59b' располагаются на расстоянии друг от друга и каждое ребро 59a' и 59b' имеет высоту, равную по меньшей мере приблизительно 0,0127 см (0,005 дюйма). Они препятствуют полному уплощению консольной балки и ее полному прижатию к задней поверхности выемки. Таким образом, ребра 59a' и 59b' предотвращают деформацию консольной балки, препятствуя переносу нагрузки с концов пружины или консольной балки вовнутрь. Специалисту в данной области будет понятно, что точное размещение, количество и размер ребер 59a' и 59b' могут изменяться в зависимости от конфигурации соединения с предварительным натягом, а также от сил, необходимых для предотвращения выпадения клипсы в процессе закрытия.
На практике, как показано на Фиг.17A-17D, когда спусковой крючок 16 начинает перемещение из открытого положения в закрытое, ролик замыкающего звена 54 вращается в выемке 110 в спусковом вкладыше 48. После того как толкатель 38 и муфта толкателя 50 займут крайнее дистальное положение, как показано на Фиг.17C, при дальнейшем нажатии на спусковой крючок 16 выемка 110 в спусковом вкладыше 48 сцепляется с роликом замыкающего звена 54, заставляя его вращаться вместе со спусковым вкладышем 48, как показано на Фиг.17D. В результате этого сцепное устройство замыкающего звена 58 перемещается в дистальном направлении, заставляя стержень толкателя 44 перемещаться в дистальном направлении. По мере продвижения стержня толкателя 44 в дистальном направлении кулачковая планка 42 продвигается над зажимами 20, смыкая зажимы 20 и загибая клипсу между ними. Спусковой крючок 16 в альтернативном варианте может быть частично закрытым, лишь частично смыкая зажимы 20 и таким образом частично загибая клипсу между ними. Примеры методик выбора вариантов полного или частичного смыкания клипсы будут более подробно рассмотрены ниже. После наложения клипсы спусковой крючок 16 возвращается в исходное положение, в результате чего пружина 120 оттягивает спусковой вкладыш 48 назад в исходное положение, а пружина 122 заставляет муфту толкателя 50 и толкатель 38 перемещаться в проксимальное положение. После возврата спускового вкладыша 48 в исходное положение ролик замыкающего звена 54 также перемещается назад в исходное положение, оттягивая замыкающее звено 56, сцепное устройство замыкающего звена 58 и стержень толкателя 44 в проксимальном направлении.
Хирургический клипсонакладыватель 10 также может включать другие приспособления, облегчающие использование устройства 10. В одном примере осуществления хирургический клипсонакладыватель 10 может включать противовозвратный механизм, обеспечивающий контролируемое перемещение спускового крючка 16. В частности, противовозвратный механизм препятствует открытию спускового крючка 16 во время хода на частичное закрытие. Однако после достижения спусковым крючком заданного положения, в котором клипса, размещенная между зажимами, может быть частично сомкнута, противовозвратный механизм разблокирует спусковой крючок, обеспечивая таким образом открытие спускового крючка и высвобождение клипсы или его закрытие для полного смыкания клипсы, по желанию пользователя.
На Фиг.21A и 21B представлен пример осуществления противовозвратного механизма, выполненного в виде храпового механизма. Как показано, храповый механизм включает ряд зубцов 112, размещенных на спусковом вкладыше 48, и предохранитель 60, свободно вращающийся в корпусе 12 и выполненный смежно со спусковым вкладышем 48 так, что закрытие спускового крючка 16 и поворот спускового вкладыша 48 приводит предохранитель 60 в сцепление с зубцами 112. Зубцы 112 могут иметь конфигурацию, препятствующую вращению предохранителя 60 до тех пор, пока предохранитель 60 не достигнет заданного положения, в котором он может свободно вращаться, открывая или закрывая спусковой крючок 16. Заданное положение предпочтительно соответствует положению, в котором зажимы 20 частично закрыты. В примере осуществления, как показано, зубцы 112 включают первый ряд зубцов 112a, а именно десять зубцов, размер которых позволяет препятствовать вращению предохранителя 60 относительно них, таким образом препятствуя открытию спускового крючка 16, когда предохранитель 60 находится в сцеплении с первым рядом 112a зубцов 112. Зубцы 112 также включают завершающий (терминальный) зубец, или концевой зубец 112b, размер которого позволяет предохранителю 60 вращаться относительно него, когда предохранитель 60 находится в сцеплении с концевым зубцом 12b. В частности, размер концевого зубца 12b по существу превосходит размер зубцов первого ряда 112a. Таким образом, между первым рядом зубцов 112а и концевым зубцом 112b образуется относительно большой зазор 140. Размер зазора 140 обеспечивает возможность поворота предохранителя 60. Таким образом, предохранитель 60 может перемещаться либо за первым рядом зубцов 112b, либо назад в направлении первого ряда зубцов 112a. Специалисту в данной области будет понятно, что концевой зубец 112b может иметь такой же или меньший размер, чем первый ряд зубцов 112a, обеспечивая зазор 140 между ними и позволяя предохранителю 60 свободно вращаться.
На Фиг.22A-22D представлен храповый механизм в действии. При перемещении спускового крючка 16 в направлении закрытия, как показано на Фиг.22A, предохранитель 60 сцепляется с первым рядом зубцов 112a, препятствуя открытию спускового крючка 16. Последующее нажатие спускового крючка 16 заставляет предохранитель 60 продвигаться за первый ряд зубцов 112a до тех пор, пока предохранитель 60 не достигнет зазора 140 рядом с концевым зубцом 112b. После достижения предохранителем 60 положения рядом с концевым зубцом 112b, в котором зажимы 20 частично закрыты вследствие частичного дистального смещения кулачковой планки 42 над зажимами 20, предохранитель 60 может свободно вращаться, открывая или закрывая спусковой крючок 16 по желанию пользователя. На Фиг.22C представлен спусковой крючок 16 в полностью закрытом положении, а на Фиг.22D и 22E представлен спусковой крючок 16, возвращающийся в открытое положение.
Благодаря специальной конструкции храповый механизм может издавать слышимый звук, обозначающий положение зажимов 20. Например, первый звук раздается, когда предохранитель 60 входит в сцепление с первым рядом зубьев 112a, а второй, отличный от первого, например, более громкий звук, раздается, когда предохранитель 60 входит в сцепление с концевым зубцом 112b. Таким образом, при достижении спусковым крючком 16 заданного положения, в котором предохранитель 60 находится в сцеплении с концевым зубцом 112b, звук указывает пользователю на то, что зажимы 20 находятся в частично закрытом положении. Так, пользовать может отпустить спусковой крючок 16, чтобы высвободить частично зажатую клипсу или наоборот полностью закрыть спусковой крючок 16, чтобы полностью зажать клипсу.
В другом примере осуществления хирургический клипсонакладыватель 10 может включать механизм защиты от перегрузки, препятствующий воздействию избыточного усилия на зажимы 20 спусковым крючком 16. Как правило, в процессе наложения хирургической клипсы для закрытия зажимов 20 и загибания клипсы вокруг ткани, находящейся между концами клипсы, необходимо определенное усилие. В процессе формирования, когда клипса по меньшей мере частично сомкнута, усилие, необходимое для закрытия зажимов 20, охватывающих клипсу, возрастает. Соответственно, в примере осуществления механизм защиты от перегрузки может обладать сопротивлением, соответствующим величине усилия, необходимого для закрытия зажимов 20. Иными словами, сопротивление механизма защиты от перегрузки возрастает по мере увеличения усилия, необходимого для закрытия зажимов 20. Однако предпочтительно сопротивление должно незначительно превышать величину усилия, необходимого для закрытия зажимов 20, чтобы избежать случайного срабатывания механизма защиты от перегрузки. Таким образом, для предотвращения закрытия зажимов 20 при начальном нажатии спускового крючка 16 требуется относительно небольшое усилие, необходимое для преодоления сопротивления механизма защиты от перегрузки. Это несомненное преимущество, так как зажимы 20 в большей степени подвержены деформации в открытом или частично закрытом положении. Механизм защиты от перегрузки быстрее срабатывает на ранних этапах формирования клипсы, препятствуя деформации зажимов. И наоборот, когда зажимы 20 по существу закрыты, сопротивление относительно высокое, поэтому механизм защиты от перегрузки может быть приведен в действие только путем приложения достаточного усилия, воздействующего на зажимы 20.
На Фиг.23A представлен пример осуществления механизма защиты от перегрузки 62 в разобранном состоянии. Как правило, механизм защиты от перегрузки может включать защитный корпус 64, состоящий из двух частей 64a и 64b и имеющий профильное звено 66, коленно-рычажное соединение 68, шарнирное соединение 70 и смещающее устройство 72. Смещающее устройство 72 может включать пружинную стойку 150, которая соединена с корпусом 64 и имеет сквозное отверстие, предназначенное для вмещения поршня 154. Пружина 152 размещается вокруг пружинной стойки 150, а поршень 154 проходит через пружинную стойку 150 и имеет головку 154a, которая упирается в пружину 152. Как правило, шарнирное соединение 70 может иметь L-образную форму и может соединяться с корпусом 64 с помощью пальца шарнира 156, проходящего через него. Проксимальный конец 70a шарнирного соединения 70 может соприкасаться с головкой 154a поршня 154, а дистальный конец 70b шарнирного соединения 70 может быть сопряжен с коленно-рычажным соединением 68 с помощью пальца шарнира 166. В свою очередь коленно-рычажное соединение 68 может быть сопряжено с профильным звеном 66, которое, находясь в корпусе 64 рядом с отверстием 64d, предусмотренном в корпусе, свободно скользит и вращается внутри него. Вращение профильного звена 66 в корпусе 64 осуществляется, например, с помощью пальца шарнира 158, проходящего через профильное звено 66 и размещенного в первой прорези 160a (показана только одна прорезь), предусмотренной в каждой части 64a и 64b корпуса 64, а скольжение профильного звена 66 в корпусе 64 осуществляется, например, с помощью противолежащих выступов 168a и 168b, предусмотренных на профильном звене 66 и расположенных во второй прорези 160b (показана только одна прорезь), предусмотренной в каждой части 64a и 64b корпуса 64.
На практике профильное звено 66 принимает на себя усилие от узла формирования клипсы и противостоит усилию с сопротивлением смещающего устройства 72. В частности, механизм защиты от перегрузки 62 использует пружину 152 наряду с коленно-рычажным соединением 68 и шарнирным соединением 70 для перемещения профильного звена 66 из положения вращения вокруг пальца шарнира 158 или положения, в котором возможно скольжение относительно корпуса 64. Если рассматривать вращательный аспект, то усилие, обеспечиваемое сжатой пружиной 152, передается через коленно-рычажное соединение 68 и шарнирное соединение 70 так, что вращательное движение воздействует на профильное звено 66 и его положение относительно корпуса 64. Таким образом, устройство заставляет профильное звено 66 противостоять вращению относительно корпуса 64. Если момент, возникающий в результате радиальной нагрузки, передаваемой от ролика замыкающего звена 54 к профильному звену 66, превосходит момент шарнирного соединения 70 и коленно-рычажного соединения 68, профильное звено 66 начинает вращаться, обеспечивая продольный изгиб коленно-рычажного соединения 68 и заставляя шарнирное соединение 70 сжимать пружину 152. Если рассматривать аспект скольжения, то шарнирное соединение 70, коленно-рычажное соединение 68 и профильное звено 66 расположены на одной оси таким образом, что усилие скольжения (сопротивление скольжению) является усилием, необходимым для продольного изгиба коленно-рычажного соединения 68 и шарнирного соединения 70. Если радиальная нагрузка, передаваемая от ролика замыкающего звена 54 к профильному звену 66, превосходит критическое усилие соединительных элементов при продольном изгибе, то шарнирное соединение 70 сжимает пружину 152 по мере скольжения профильного звена 66 в проксимальном направлении.
Это процесс подробно показан на Фиг.23B-23C. Как показано, отверстие 64d в корпусе 64 позволяет ролику замыкающего звена 54 узла формирования клипсы вкатываться в профильное звено 66. В результате этого при нажатии на спусковой крючок 16 и его перемещении в закрытое положение ролик замыкающего звена 54 воздействует с усилием на профильное звено 66. Однако благодаря сопротивлению предохранительной пружины 152 профильное звено 66 будет удерживаться по существу в фиксированном положении до тех пор, пока усилие воздействия ролика замыкающего звена 54 не превысит усилие, превосходящее сопротивление, то есть пороговое усилие. Это может быть обусловлено, например, присутствием постороннего предмета в зажиме 20, или это происходит, когда зажимы 20 полностью закрыты вместе с клипсой и сосудом, протоком, анастомозом и т.д., находящимся в ней. Если дальнейшее закрытие зажимов 20 невозможно, то усилие, возникающее в результате перемещения спускового крючка 16 в закрытое положение и действующее на ролик замыкающего звена 54, передается профильному звену 66, которое затем вращается и скользит внутри корпуса 64, обеспечивая таким образом поворот шарнирного соединения 70, что в свою очередь заставляет поршень 154 сжимать предохранительную пружину 152.
Как указано выше, величина усилия, необходимого для приведения в действие механизма защиты от перегрузки, может соответствовать величине усилия, необходимого для закрытия зажимов 20 и возрастающего по мере перемещения спускового крючка 16 в закрытое положение. Это достигается за счет конструкции профильного звена 66. В частности, когда ролик замыкающего звена 54 изначально вступает в контакт с профильным звеном 66 и таким образом оказывается в нижнем положении, профильное звено 66 может вращаться в корпусе 64, как показано на Фиг.23B. По мере перемещения ролика замыкающего звена 54 вверх вдоль профильного звена 66 усилие, необходимое для преодоления сопротивления механизма защиты от перегрузки возрастает в связи с необходимостью скольжения профильного звена в корпусе 64, как показано на Фиг.23C. Усилие, необходимое для вращения профильного звена 66, может быть меньше усилия, необходимого для скольжения профильного звена 66. Соответственно, если существует препятствие для закрытия зажима 20, например, присутствует посторонний предмет, при первом нажатии на спусковой крючок потребуется минимальное усилие, чтобы ролик замыкающего звена 54 сообщил усилие нижней части профильного звена 66, обеспечивая вращение профильного звена 66. Когда зажимы 20 по существу находятся в закрытом состоянии, а спусковой крючок 16 почти полностью нажат, большая часть усилия направлена на ролик замыкающего звена 54, передающий усилие верхней части профильного звена 66, обеспечивая скольжение профильного звена 66 в корпусе 64 для преодоления сопротивления предохранительной пружины 152. Несмотря на то что величина усилия, необходимого для приведения в действие механизма защиты от перегрузки, может превосходить и возрастать относительно величины усилия, необходимого для закрытия зажима 20, такое усилие предпочтительно должно лишь незначительно превосходить усилие, необходимое для закрытия зажима 20, чтобы избежать деформации или повреждения зажимов 20. Специалисту в данной области будет понятно, что сопротивление можно корректировать, исходя из величины усилия, необходимого для закрытия зажимов 20.
Профильное звено 66 и, в частности, дистальная наружная поверхность 66s профильного звена 66, также может иметь соответствующую форму, обеспечивающую соответствие величины усилия, необходимого для приведения в действие механизма защиты от перегрузки, и величины усилия, необходимого для закрытия зажимов 20. Например, при линейном возрастании усилия, необходимого для закрытия зажимов 20, дистальная наружная поверхность 66s профильного звена 66 может быть плоской, препятствуя созданию профильным звеном 66 помехи для перемещения по нему ролика замыкающего элемента 54 и обеспечивая усилие прямолинейного движения, воздействующее на спусковой крючок 16 для закрытия зажимов 20. И, наоборот, при нелинейном возрастании усилия, необходимого для закрытия зажимов 20, по мере перемещения спускового крючка 16 в закрытое положение профильное звено 66 может иметь нелинейную форму, соответствующую нелинейному усилию. Такая конфигурация будет препятствовать чрезмерному увеличению усилия, необходимого для закрытия кулачковой планки 42 (Фиг.8).
В качестве неограничивающего примера, нелинейная конфигурация усилия, необходимого для закрытия зажимов 20, может быть обусловлена формой выемки 104 в кулачковой планке 42, выполненной с возможностью выталкивания элементов зажима 96a и 96b в направлении друг друга. Как показано на Фиг.8, выемка 104 может иметь изогнутую конфигурацию. Таким образом, величина усилия будет изменяться во время прохождения кулачковой планки 42 по элементам зажима 96a и 96b. Вследствие этого профильное звено 66 может иметь соответствующую изогнутую дистальную наружную поверхность, так что усилие также будет изменяться по мере прохождения по ней ролика замыкающего звена 54. Как показано на Фиг.23A и 23B, профильное звено 66 изогнуто таким образом, что нижняя часть профильного звена 66 является по существу выпуклой, а верхняя часть профильного звена 66 является по существу вогнутой. Специалисту в данной области будет понятно, что профильное звено 66 может иметь различные формы, а также что существует ряд других способов оптимизации усилия, необходимого для закрытия зажимов 20, и усилия, необходимого для приведения в действие механизма защиты от перегрузки.
Специалисту в данной области также будет понятно, что механизм защиты от перегрузки может иметь различные конфигурации. В качестве неограничивающего примера, на Фиг.23D показан механизм защиты от перегрузки, выполненный в виде консольной балки 170, принимающей усилие, с которым действует ролик замыкающего звена 54. Балка 170 может быть выполнена в виде по существу изогнутого элемента 172 с закрепленным на одном из его концов подвесом 174. Изогнутый элемент 172 имеет изгибающий момент, который под действием усилия, величина которого превосходит величину изгибающего момента, изменяется, принимая условие низкой жесткости. Подвес 174 обеспечивает жесткость изогнутого элемента 172. Таким образом, изгибающий момент возрастает в области подвеса 174. На практике балка 170 может быть помещена в корпус 12 клипсонакладывателя 10 так, что ролик замыкающего звена 54 взаимодействует с вогнутой поверхностью. Кроме того, балка 170 может размещаться под углом так, что ролик замыкающего звена 54 находится вдали от балки во время нажатия спускового крючка 16, и ролик замыкающего звена 54 приближается к балке по мере перемещения спускового крючка 16 в закрытое положение. Таким образом, сопротивление продольному изгибу возрастает по мере перемещения ролика замыкающего звена 54 и перемещения спускового крючка 16 клипсонакладывателя в закрытое положение. Хотя это не показано на фигуре, в альтернативном варианте может использоваться несколько балок, расположенных друг над другом, а терминальный или свободный конец балки(-ок) может иметь форму, позволяющую подстроиться под усилие продольного изгиба в каждой конкретной точке длины балки.
В другом примере осуществления хирургический клипсонакладыватель 10 может включать индикатор количества клипс, показывающий количество оставшихся в устройстве 10 клипс. Хотя допускается использование различных способов индикации количества оставшихся клипс, на Фиг.24A-25 представлен пример осуществления индикатора количества клипс, имеющий диск индикатора 74 и переключатель индикатора 76.
Диск индикатора 74 подробно показан на Фиг.24A и 24B. Как показано, он имеет по существу круглую или цилиндрическую форму, определяющую центральную ось Y, вокруг которой вращается диск 74. Диск 74 имеет зубцы 142, расположенные по его периметру и предназначенные для сцепления с переключателем индикатора 76, а также индикаторный элемент 144. Индикаторный элемент 144 может иметь различные конфигурации, но в примере осуществления индикаторный элемент 144 выполнен в виде накладки контрастного цвета, например, оранжевого, красного и т. д., отличающегося от цвета диска индикатора 74.
На Фиг.25 более подробно представлен пример переключателя индикатора 76. Переключатель 76 находится в корпусе 12 и имеет возможность свободно скользить внутри него, сцепляясь с муфтой толкателя 50 и перемещаясь по мере перемещения муфты толкателя 50 и толкателя 38. Соответственно, переключатель индикатора 76 может включать выступ 146 (показана только его часть), предусмотренный на нижней поверхности и проходящий в выемке 50f, образуемой круглыми фланцами 50d и 50e на муфте толкателя 50. Выступ 146 обеспечивает сцепление переключателя индикатора 76 с муфтой толкателя 50 и их совместное перемещение. Переключатель индикатора 76 также может включать механизм сцепления 148, предусмотренный на нем и обеспечивающий сцепление с зубцами 142 на диске индикатора 74. Как показано на Фиг.25, механизм сцепления 148 на переключателе индикатора 76 выполнен в виде рычага с язычком на конце для сцепления с зубцами 142.
На практике диск индикатора 74 находится в корпусе 12, при этом предусмотрена возможность его вращения, как показано на Фиг.26A-26B, а переключатель индикатора 76 находится в корпусе 12, при этом предусмотрена возможность его скольжения, а механизм сцепления 148 находится рядом с диском индикатора 74 и выступом 146, проходящим в муфту толкателя 50. Корпус 12 имеет окно 12a для визуального доступа к диску индикатора 144. По мере перемещения спускового крючка 16 в закрытое положение и перемещения муфты толкателя 50 в дистальном направлении переключатель индикатора 76 перемещается дистально вместе с толкателем 38 и муфтой толкателя 50. В результате этого механизм сцепления 148 на переключателе индикатора 76 входит в сцепление с зубцами 142 на диске индикатора 74, заставляя диск 74 вращаться после выталкивания клипсы в зажим 20. Каждый раз при нажатии на спусковой крючок 16 для продвижения клипсы 20 в зажимы 20 переключатель индикатора 74 вращает диск индикатора 76. Когда в картридже остается две или три клипсы, в окне 12а, предусмотренном в корпусе 12, на диске индикатора 74 появляется накладка контрастного цвета 144, сообщающая пользователю о том, что в устройстве осталось несколько клипс. Накладка контрастного цвета 144 может занимать все окно 12a, когда комплект клипс исчерпан.
В другом примере осуществления диск индикатора 74 может включать противовозвратный механизм, препятствующий вращению диска индикатора 74 в обратном направлении, то есть в направлении против часовой стрелки, после продвижения вперед. Несмотря на то что противовозвратный механизм может иметь различные конфигурации, в варианте осуществления, изображенном на Фиг.24B, диск индикатора 74 имеет противолежащие лапки 73a и 73b, проходящие по существу параллельно оси Y. Каждая лапка 73a и 73b имеет предохранители 75a и 75b, предусмотренные на их крайних дистальных концах и обеспечивающие сцепление с соответствующими зубцами на корпусе 12. Несмотря на то что это не показано на фигуре, соответствующие зубцы могут быть расположены на внутренней части кольцеобразного выступа, расположенного на внутренней поверхности корпуса 12 рядом с окном 12a. Когда диск индикатора 74 находится в корпусе 12, лапки 73a и 73b входят в кольцеобразный выступ, проходящий по периметру внутренней окружности корпуса. После наложения клипсы и вращения диска индикатора 74 лапки 73a и 73b, отклоняясь, перемещаются над зубцами в корпусе и занимают следующее положение. При перемещении переключателя индикатора 76 в проксимальном направлении назад в исходное положение лапки 73a и 73b входят в сцепление с зубцами в корпусе, препятствуя таким образом вращению диска индикатора 74 в обратном направлении, то есть возврату в предыдущее положение. Специалисту в данной области техники будет понятно, что существуют другие способы предотвращения обратного хода диска индикатора 74.
Как указано выше, хирургический клипсонакладыватель 10 может использоваться для наложения частично или полностью сомкнутых клипс в оперативном поле, то есть на сосуды, каналы, для наложения анастомозов и т.д. В лапароскопической и эндоскопической хирургии на теле пациента выполняется небольшой разрез для получения доступа к оперативному полю. Как правило, рабочий канал, проходящий от разреза на коже до оперативного поля, формирует канюля или отверстие доступа. Часто во время хирургической операции возникает необходимость остановить ток крови по сосудам или другим каналам, а во время некоторых процедур может потребоваться наложение анастомоза. Таким образом, хирургическая клипса может использоваться для сжатия сосуда или фиксации анастомоза у сосуда. Соответственно, хирургический клипсонакладыватель, например, клипсонакладыватель 10, может быть введен через канюлю или иным способом в операционное поле, при этом зажимы 20 размещаются вокруг сосуда, анастомоза или другого канала. Тканевый упор 46 облегчает размещение зажимов 20 вокруг целевой области. Затем пользователь нажимает на спусковой крючок 16, инициируя продвижение клипсы в зажимы и ее размещение вокруг целевой области, а также закрытие зажима 20 и загибание клипсы. В зависимости от предназначения клипсы может выполняться частичное нажатие спускового крючка 16, о чем свидетельствует слышимый звук предохранителя 60, достигающего концевого зубца 112b, или полное нажатие спускового крючка. После этого спусковой крючок 16 освобождается, освобождая частично или полностью сомкнутую клипсу, и, при необходимости, процедура повторяется, обеспечивая наложение дополнительных клипс.
Специалисту в данной области техники будут понятны особенности и преимущества настоящего изобретения на основе описанных выше вариантов осуществления. Соответственно, настоящее изобретение не ограничивается представленными на фигурах и описанными вариантами осуществления, за исключением случаев, которые оговариваются в прилагаемой формуле изобретения. Все публикации и материалы, цитируемые в настоящем документе, полностью и в явной форме включены в него путем ссылки.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ПОДАЧИ КЛИПС С МЕХАНИЗМОМ БЛОКИРОВКИ | 2010 |
|
RU2549990C2 |
| ВЫДВИГАЮЩИЙ КЛИПСЫ МЕХАНИЗМ С ВОЗМОЖНОСТЯМИ СОВМЕЩЕНИЯ | 2006 |
|
RU2435535C2 |
| УСТРОЙСТВО ДЛЯ НАЛОЖЕНИЯ КЛИПС С ВОЗМОЖНОСТЯМИ СОПРОТИВЛЕНИЯ СМЕЩЕНИЮ | 2006 |
|
RU2433792C2 |
| УСТРОЙСТВО ДЛЯ НАЛОЖЕНИЯ КЛИПС С ВОЗМОЖНОСТЬЮ ПРЕДОТВРАЩЕНИЯ ВЫПАДЕНИЯ КЛИПСЫ | 2006 |
|
RU2435536C2 |
| АППЛИКАТОРЫ, ИМЕЮЩИЕ ДИСТАЛЬНЫЕ КОНЦЕВЫЕ КОЛПАЧКИ, ОБЛЕГЧАЮЩИЕ ТОЧНОЕ РАЗМЕЩЕНИЕ ХИРУРГИЧЕСКИХ КРЕПЕЖНЫХ ЭЛЕМЕНТОВ ВО ВРЕМЯ ОТКРЫТЫХ ВОССТАНОВИТЕЛЬНЫХ ПРОЦЕДУР | 2013 |
|
RU2633281C2 |
| АППЛИКАТОРЫ С СИСТЕМАМИ ВИЗУАЛИЗАЦИИ ДЛЯ ВЫДАЧИ ХИРУРГИЧЕСКИХ КРЕПЕЖНЫХ ЭЛЕМЕНТОВ ВО ВРЕМЯ ОТКРЫТЫХ ВОССТАНОВИТЕЛЬНЫХ ПРОЦЕДУР | 2013 |
|
RU2608626C2 |
| АППЛИКАТОРЫ, ИМЕЮЩИЕ КОНЦЕВЫЕ КОЛПАЧКИ С ЗАХВАТНЫМИ ЭЛЕМЕНТАМИ | 2016 |
|
RU2728685C2 |
| БЛОКИРОВКА ПУСТОЙ КАССЕТЫ С КЛИПСАМИ | 2013 |
|
RU2636861C2 |
| ВЗАИМОЗАМЕНЯЕМЫЙ КЛИПСОНАКЛАДЫВАТЕЛЬ | 2013 |
|
RU2636175C2 |
| СМЕННАЯ КАССЕТА С КЛИПСАМИ ДЛЯ КЛИПСОНАКЛАДЫВАТЕЛЯ | 2013 |
|
RU2637625C2 |
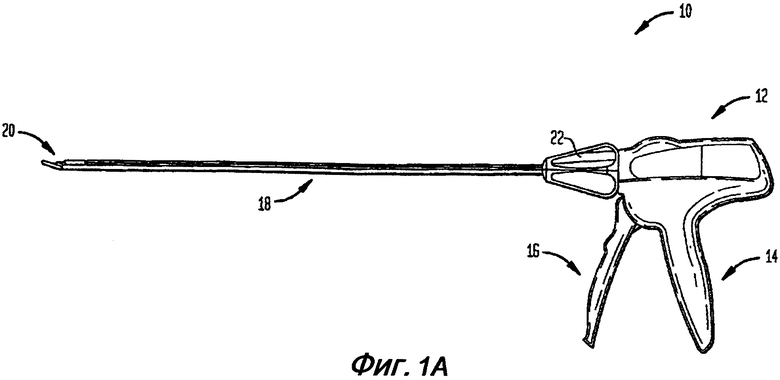
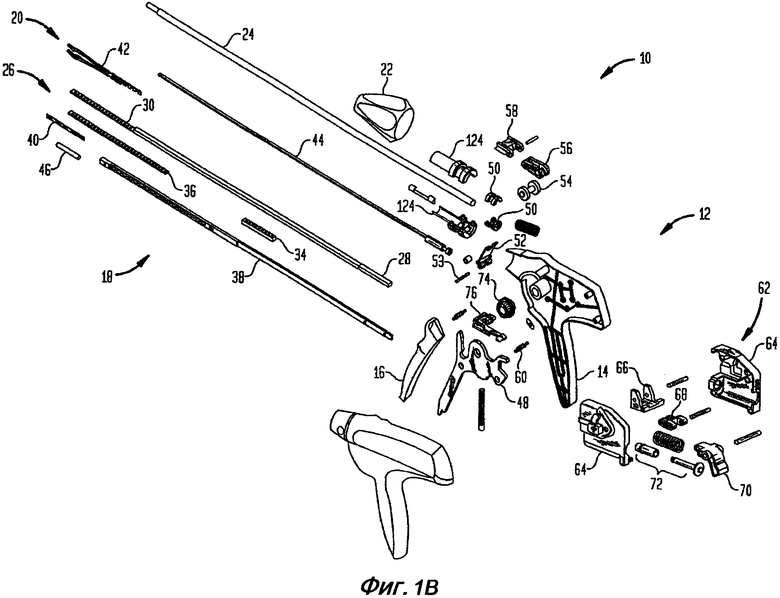



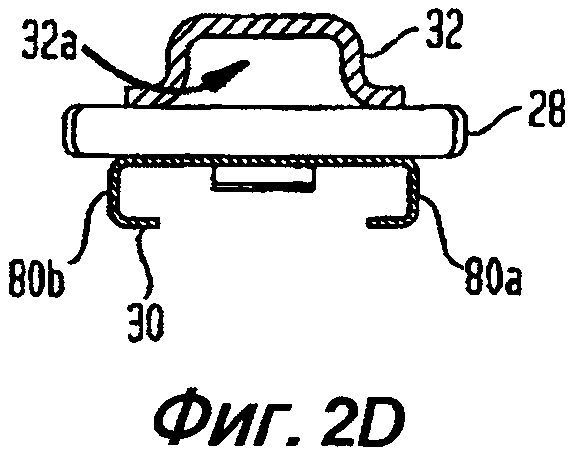
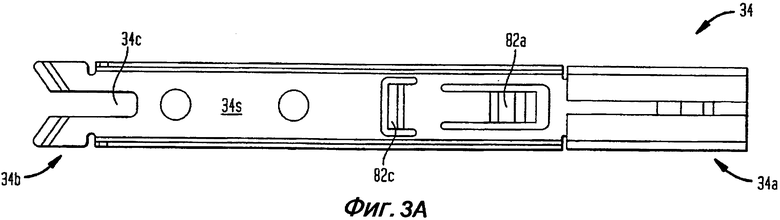
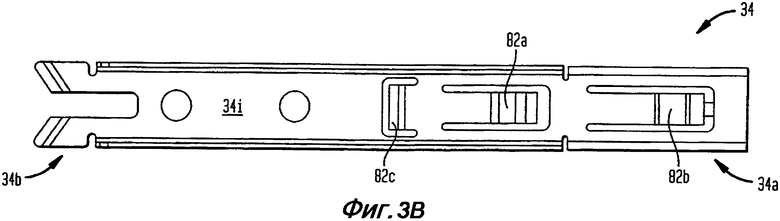
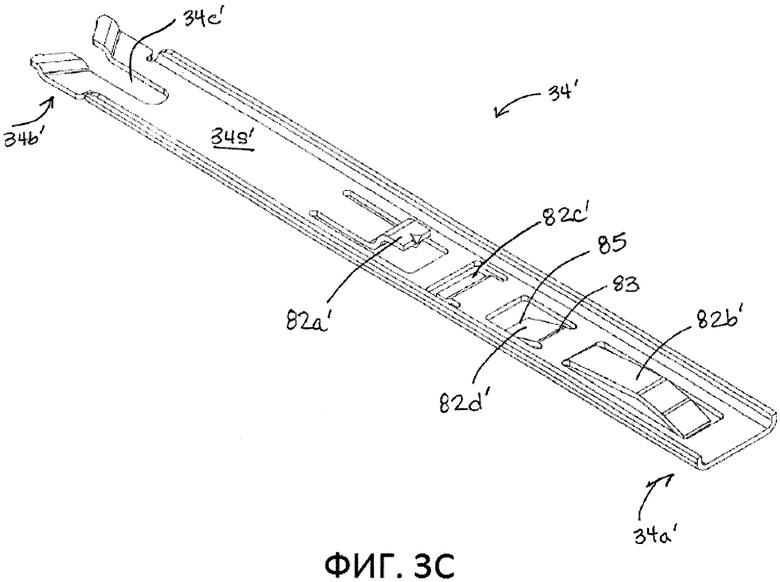
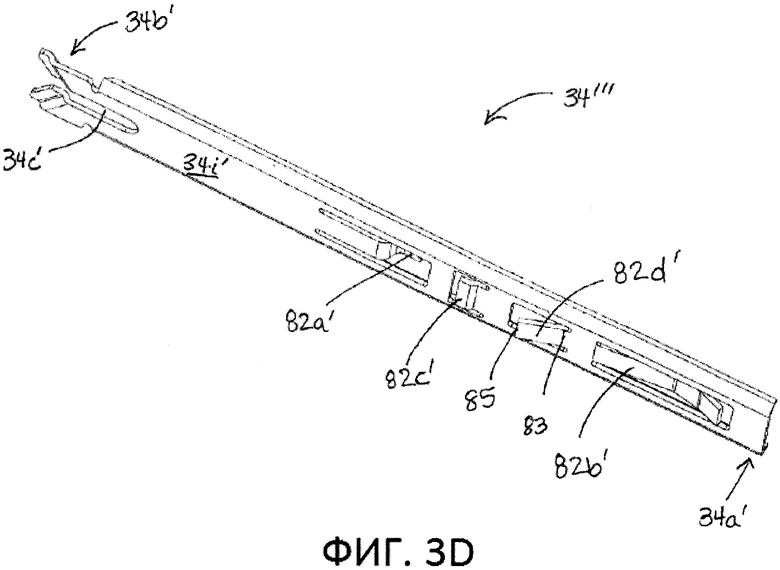
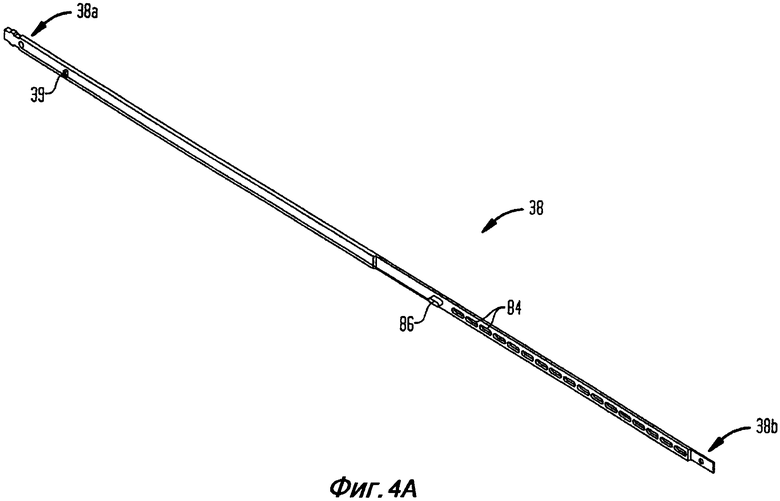
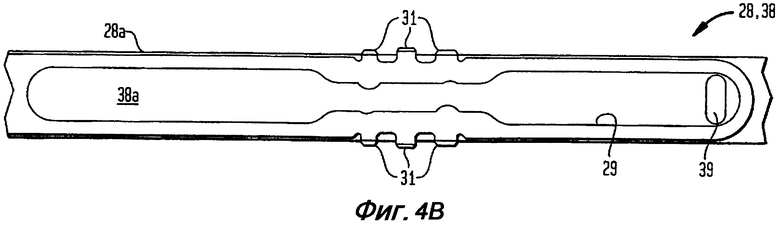
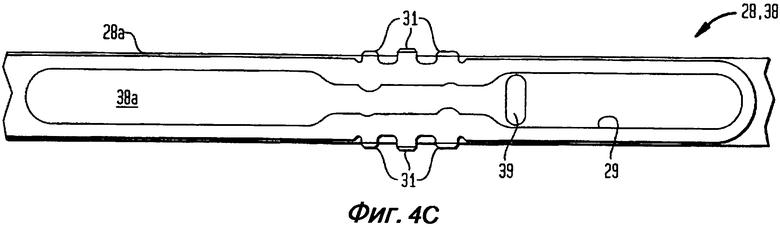
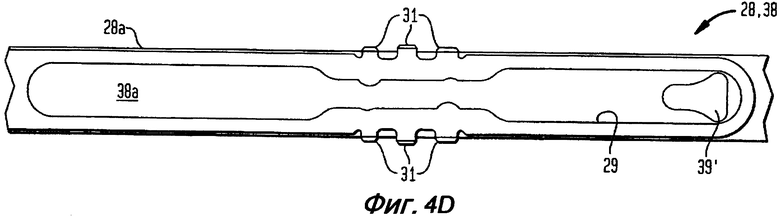
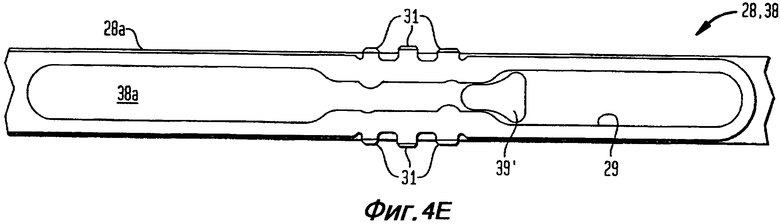
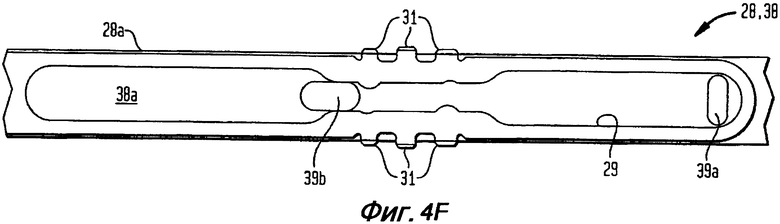
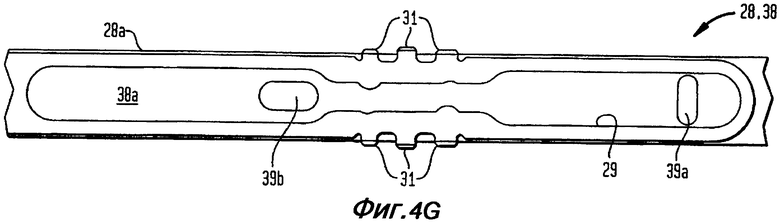
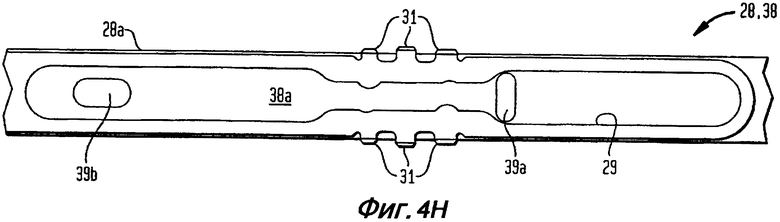
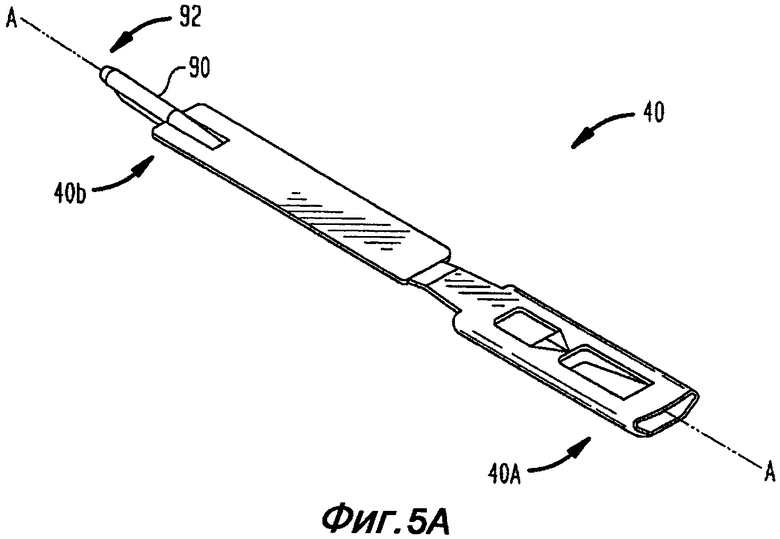
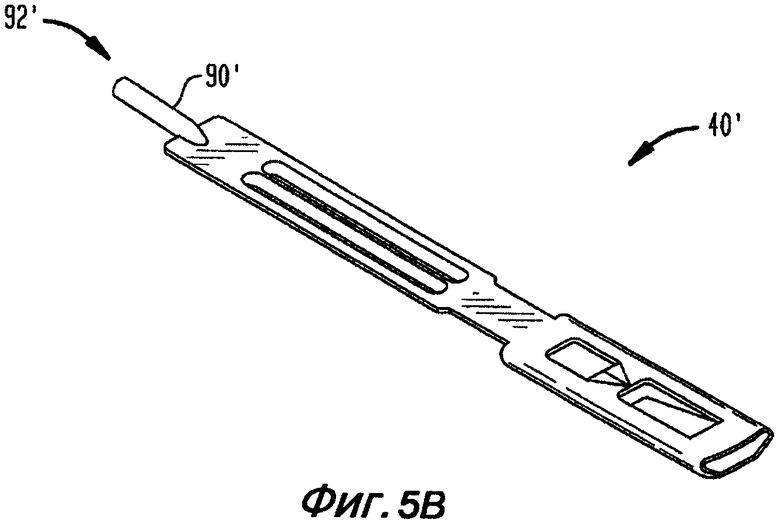
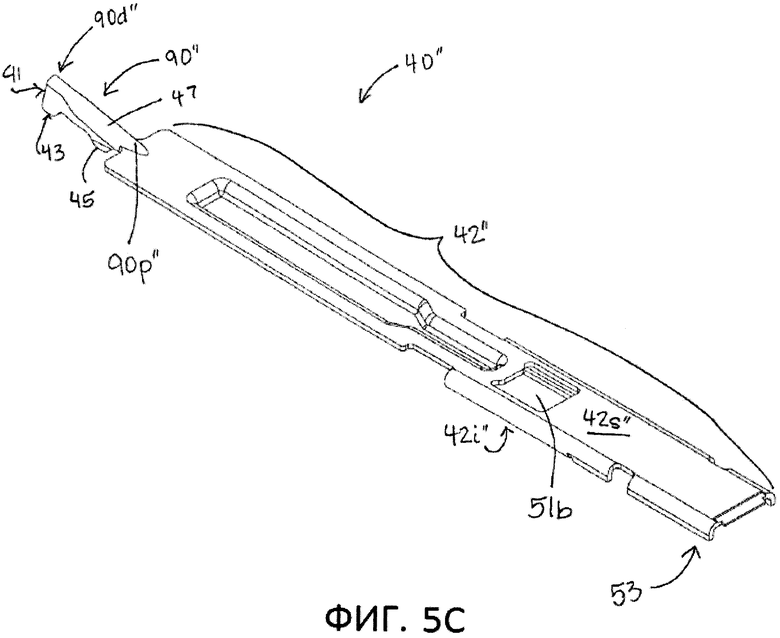
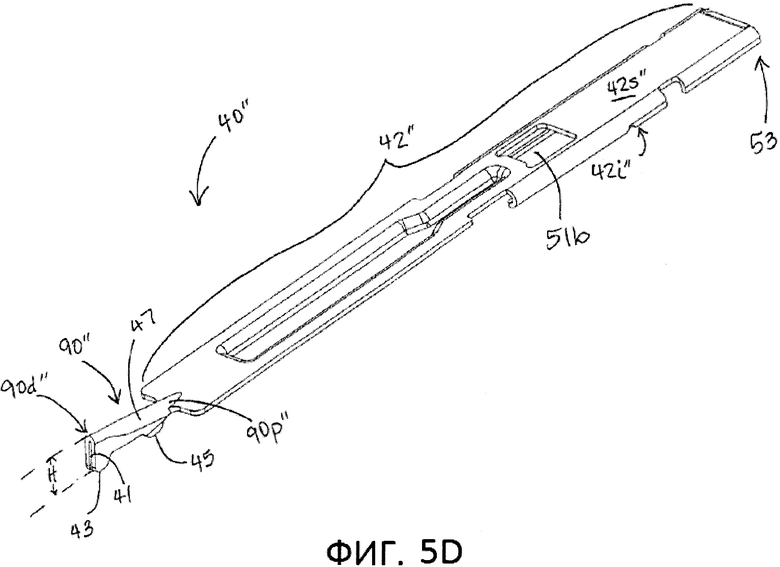
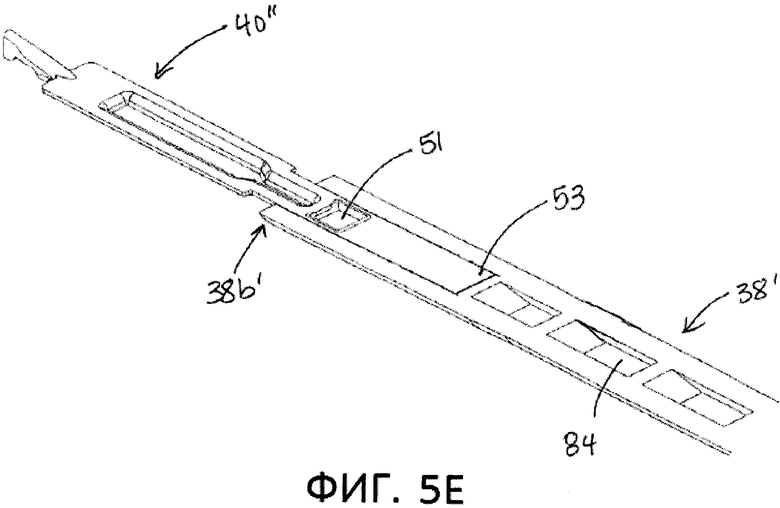
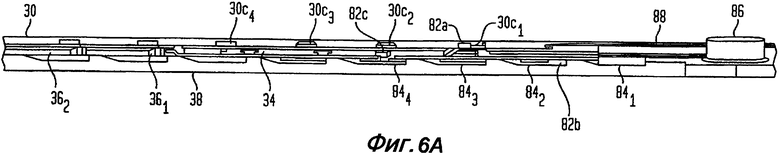
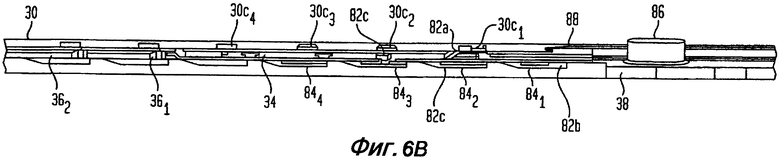


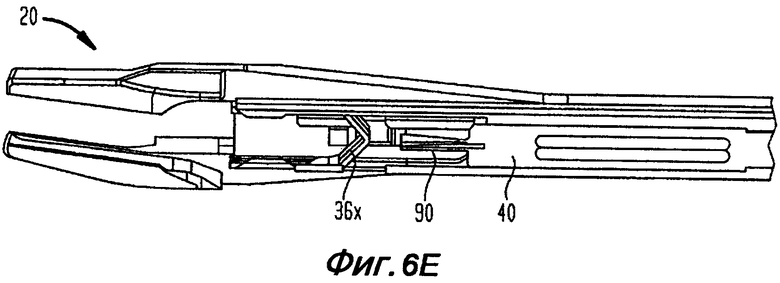
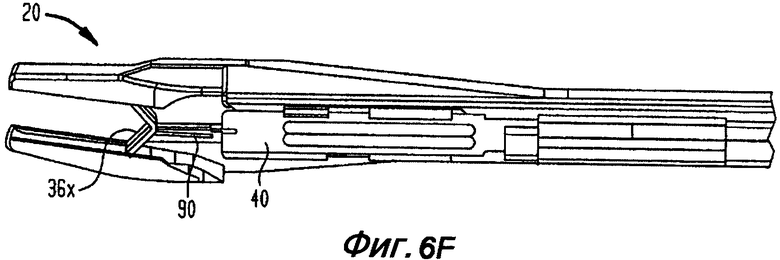
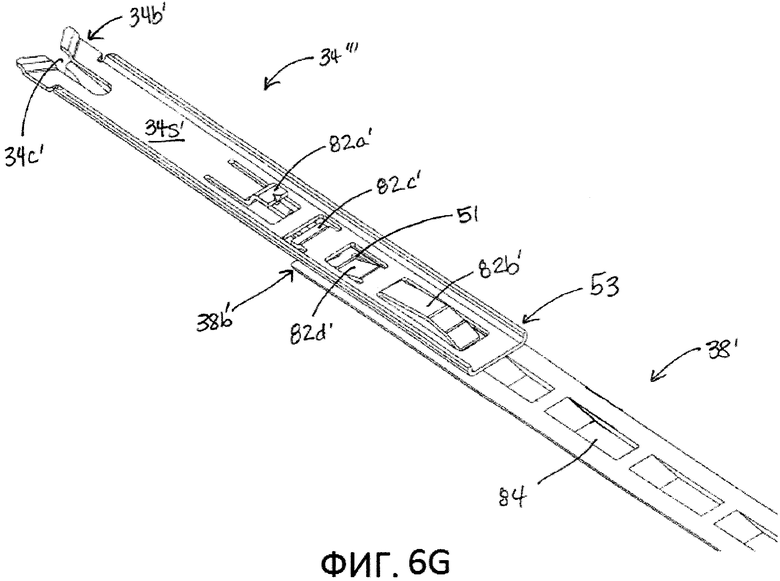
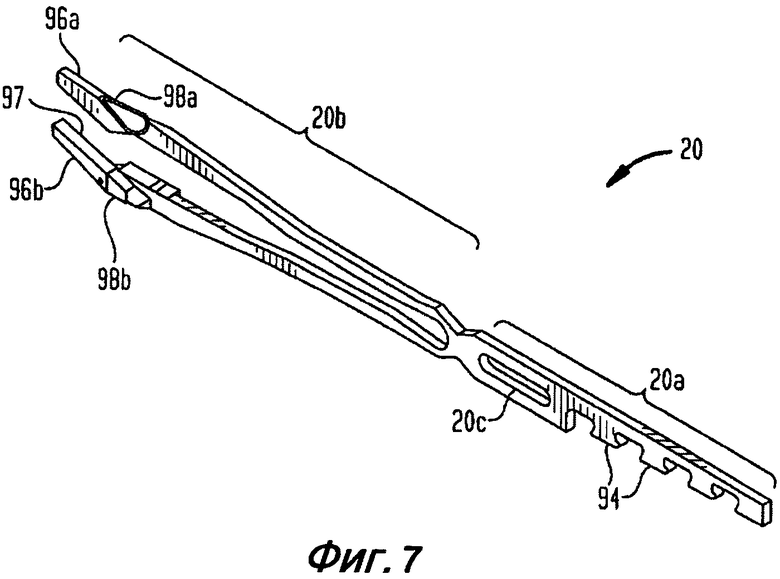
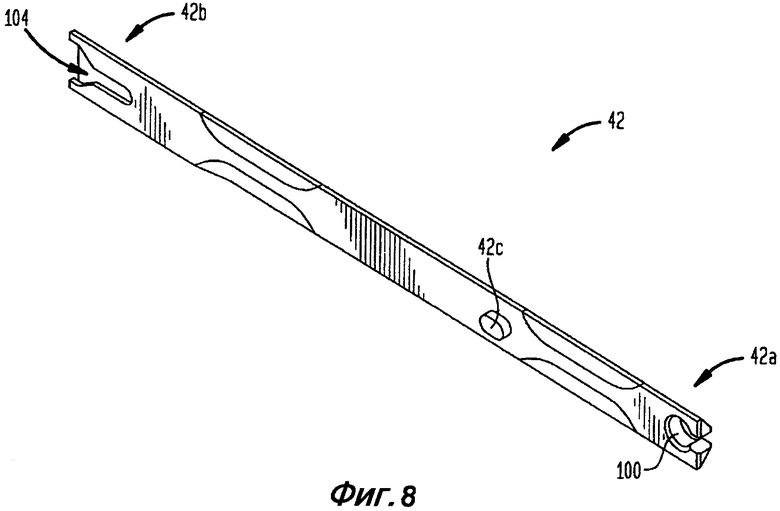
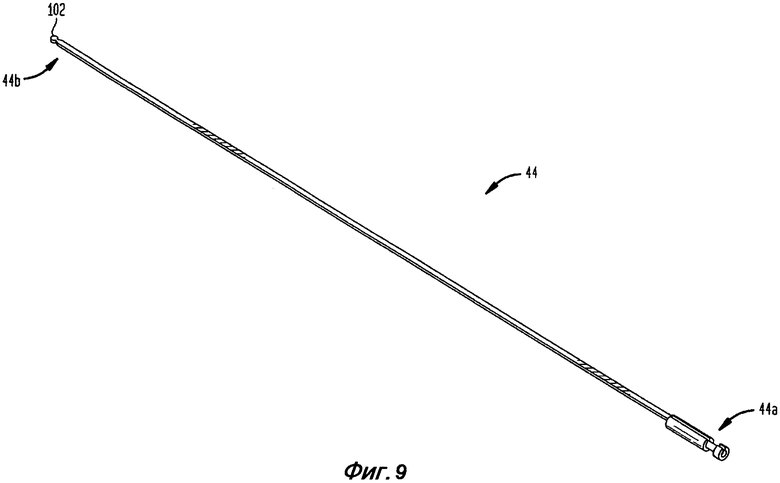
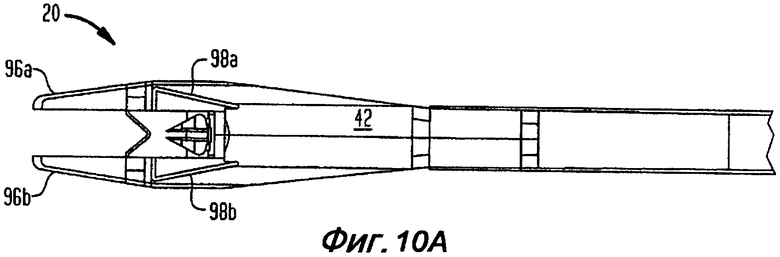

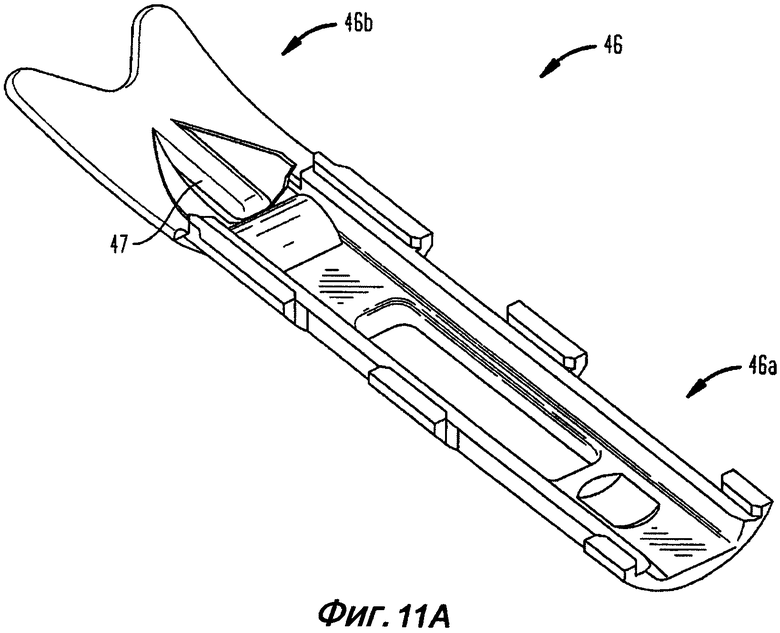
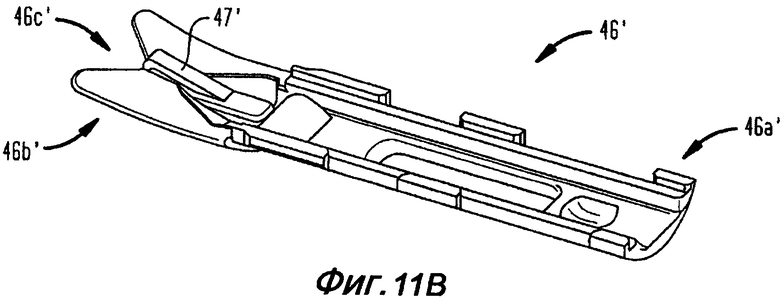
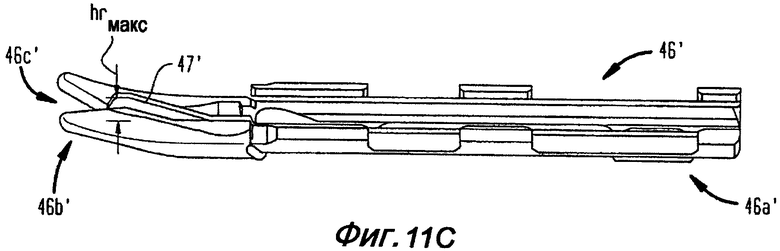
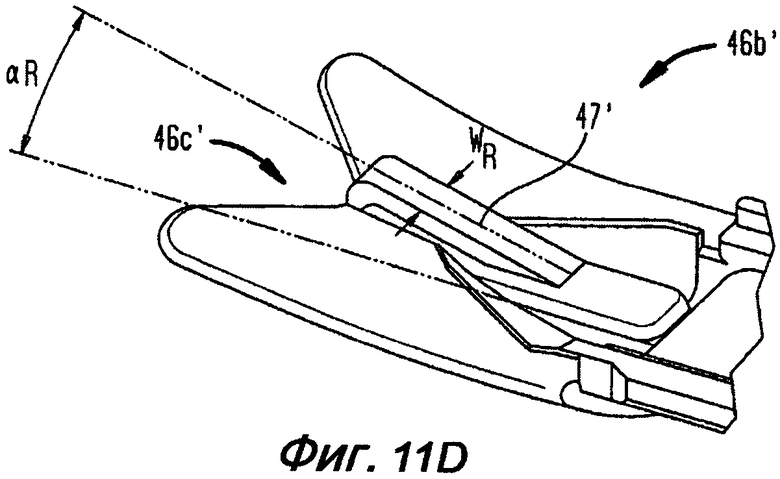
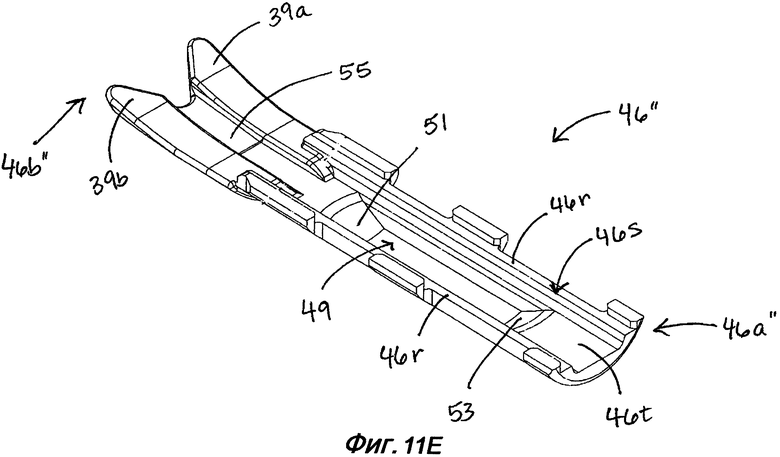
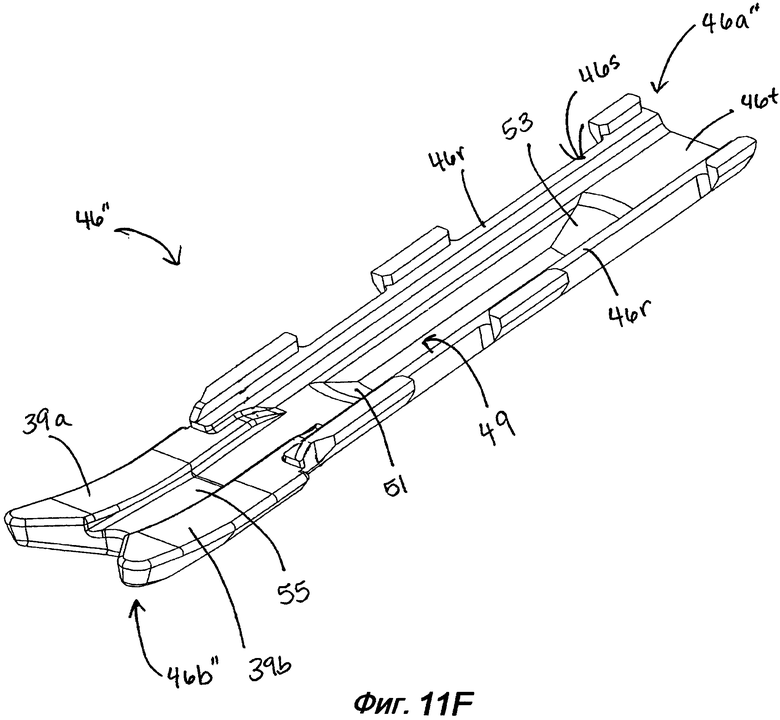
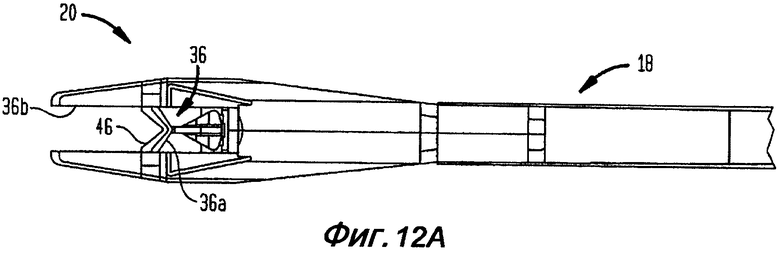
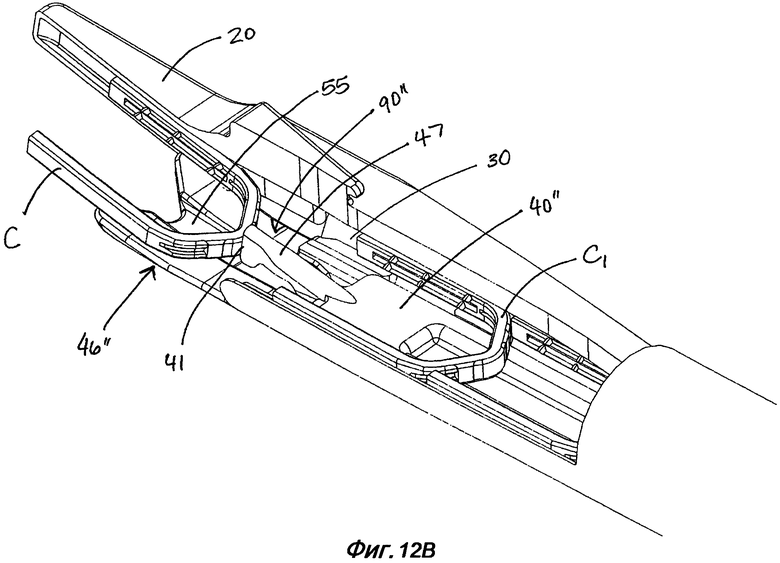
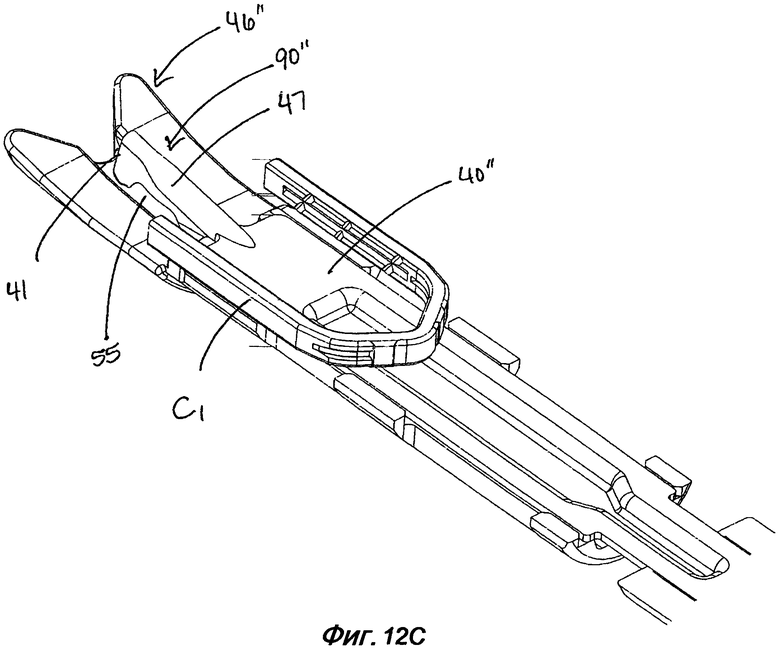
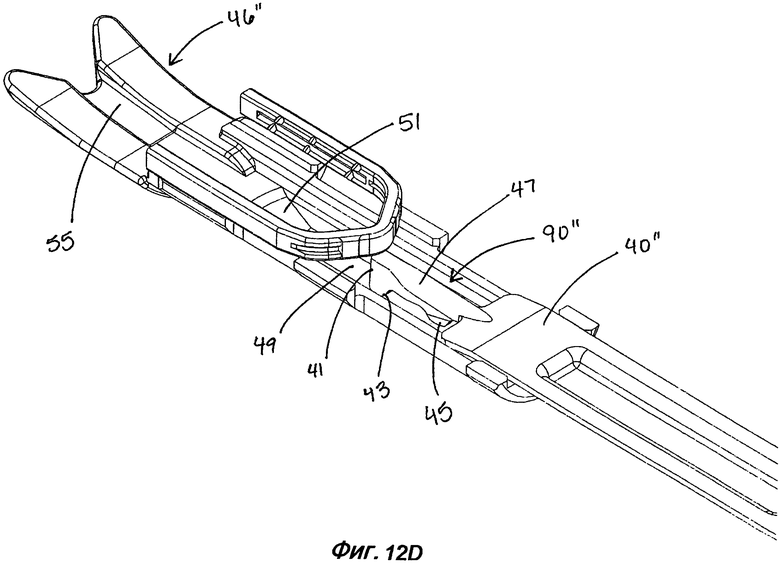
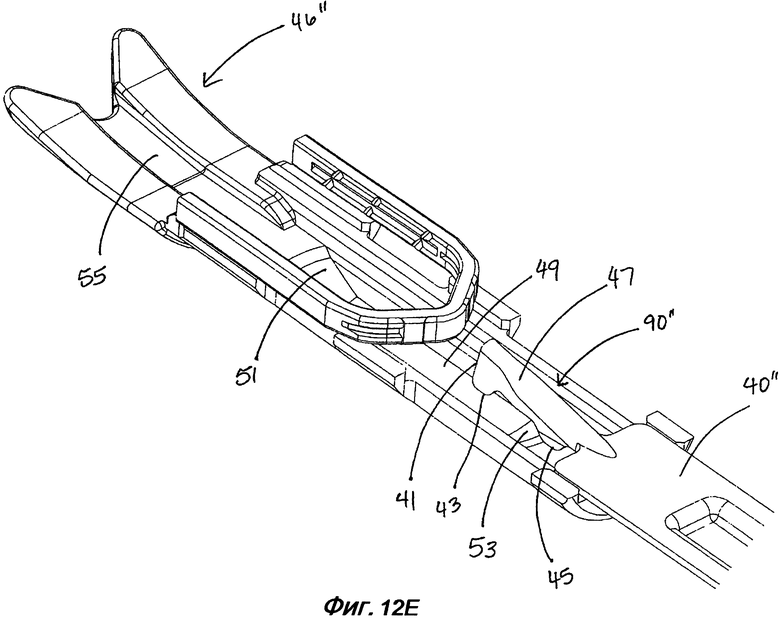
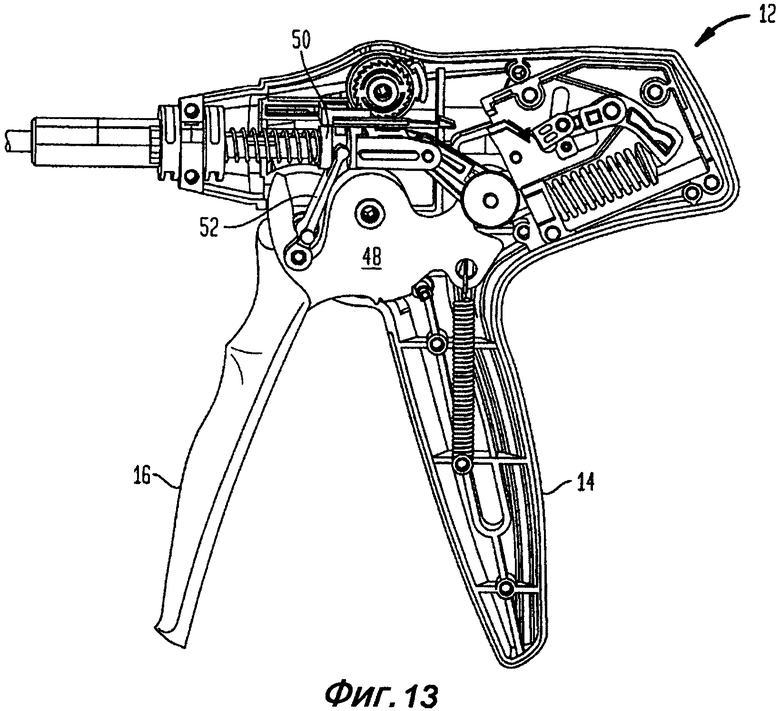
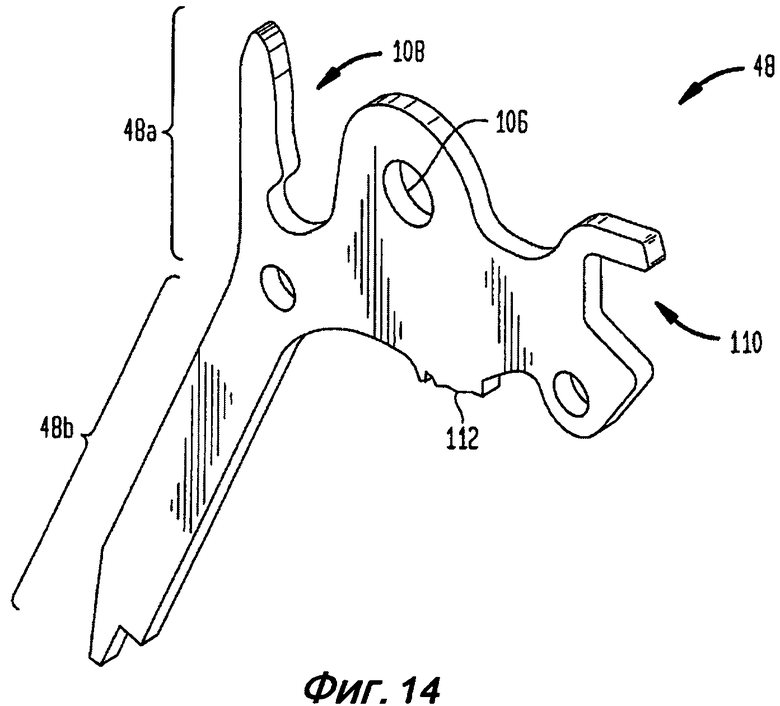
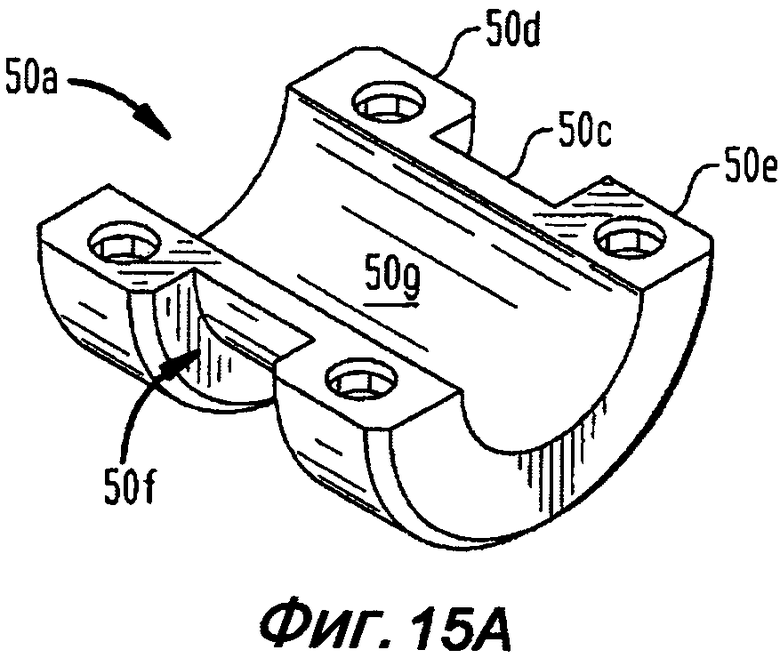
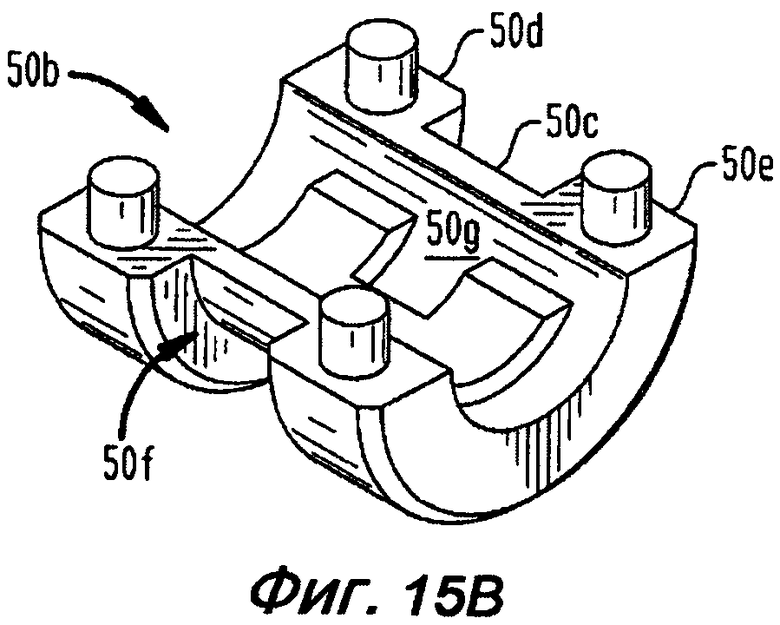
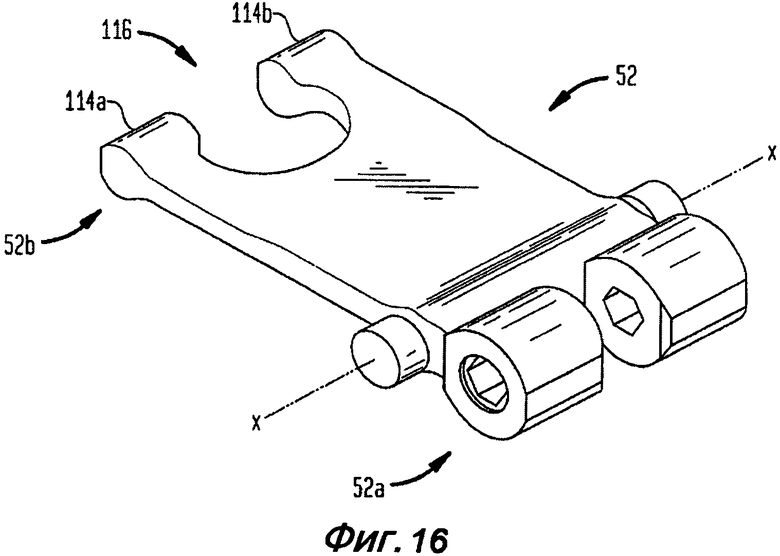
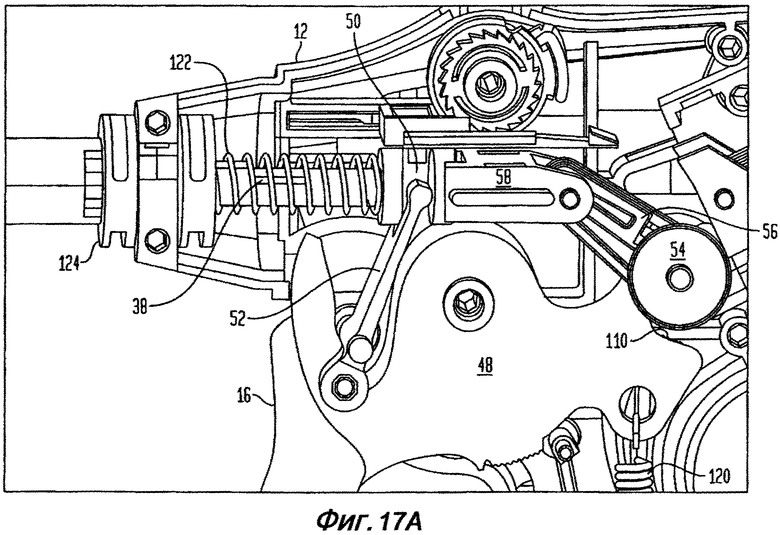
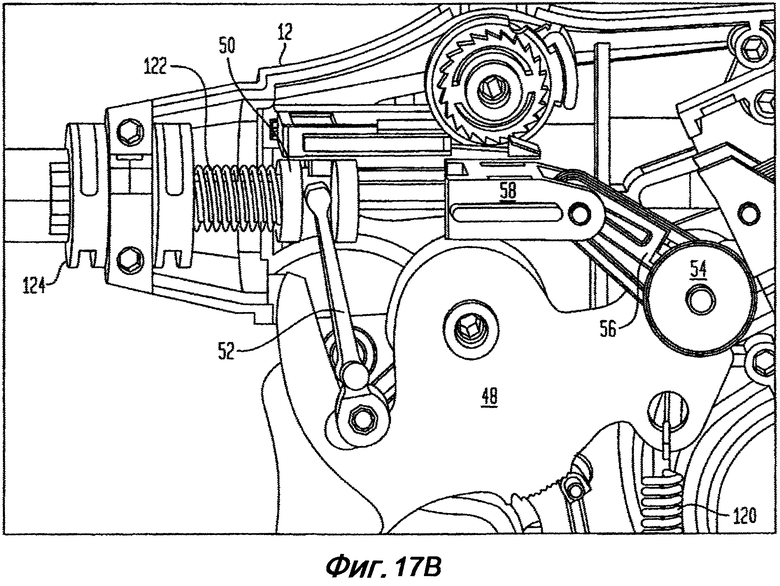
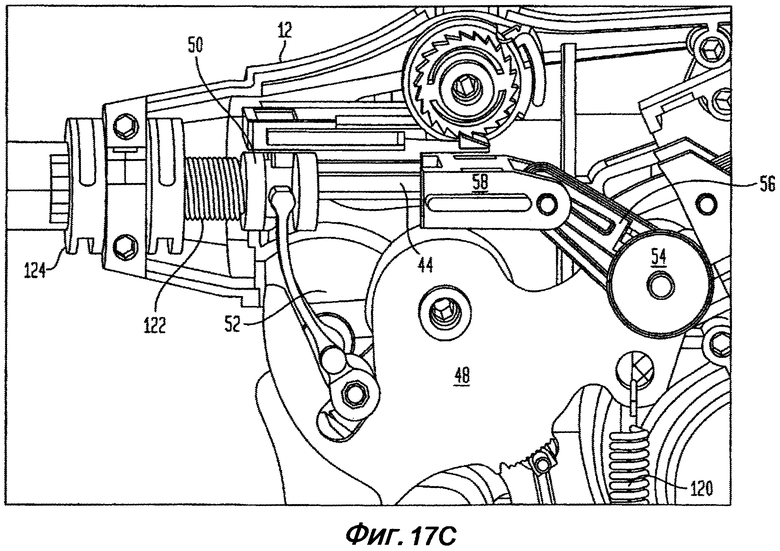
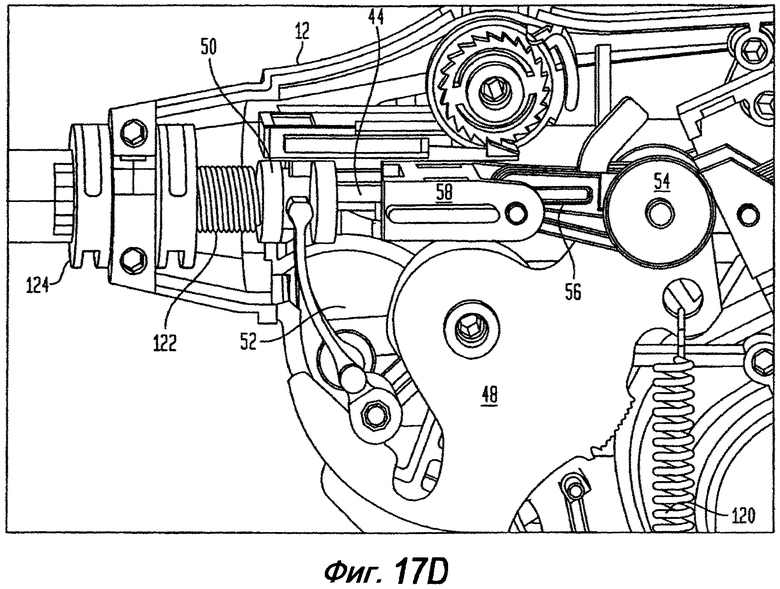
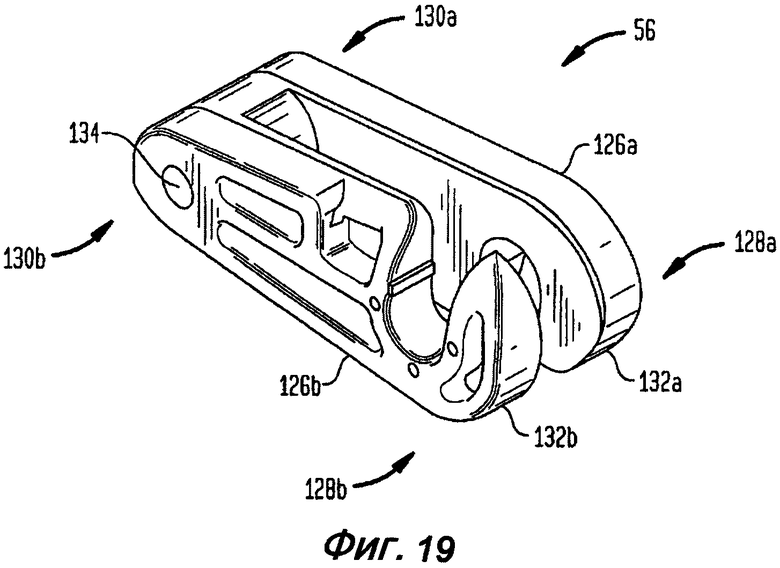
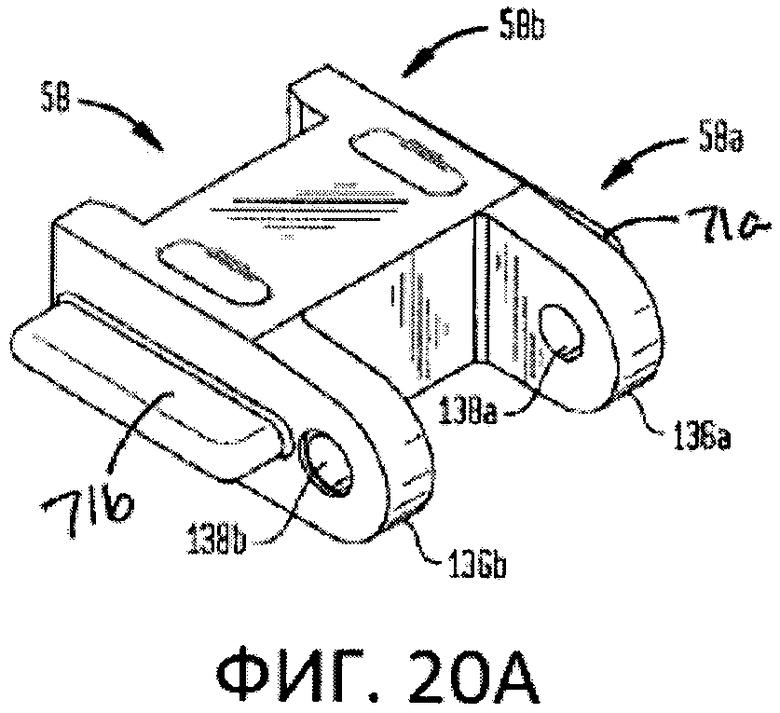
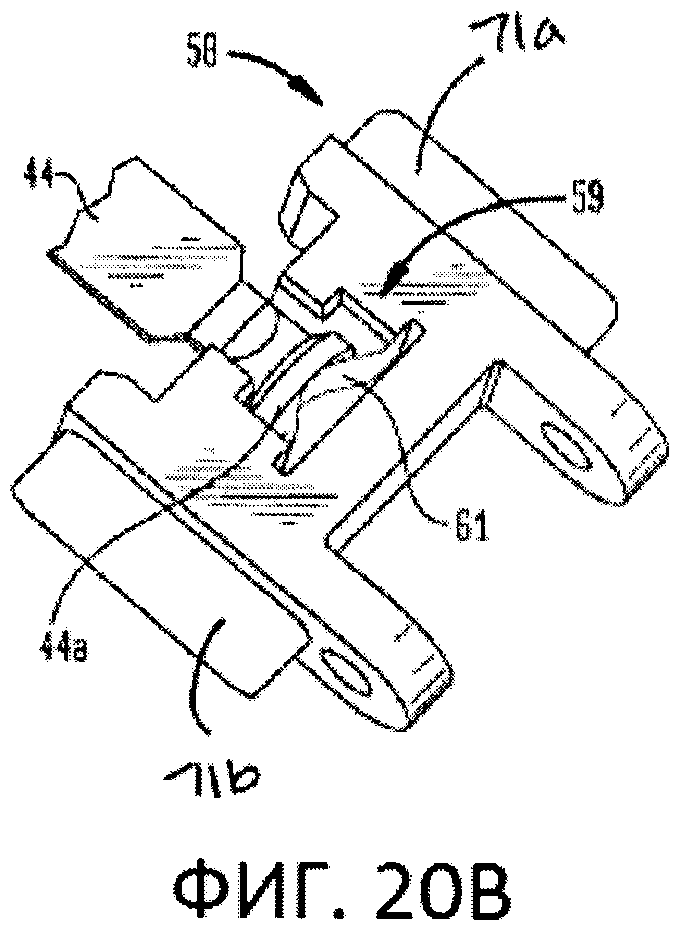
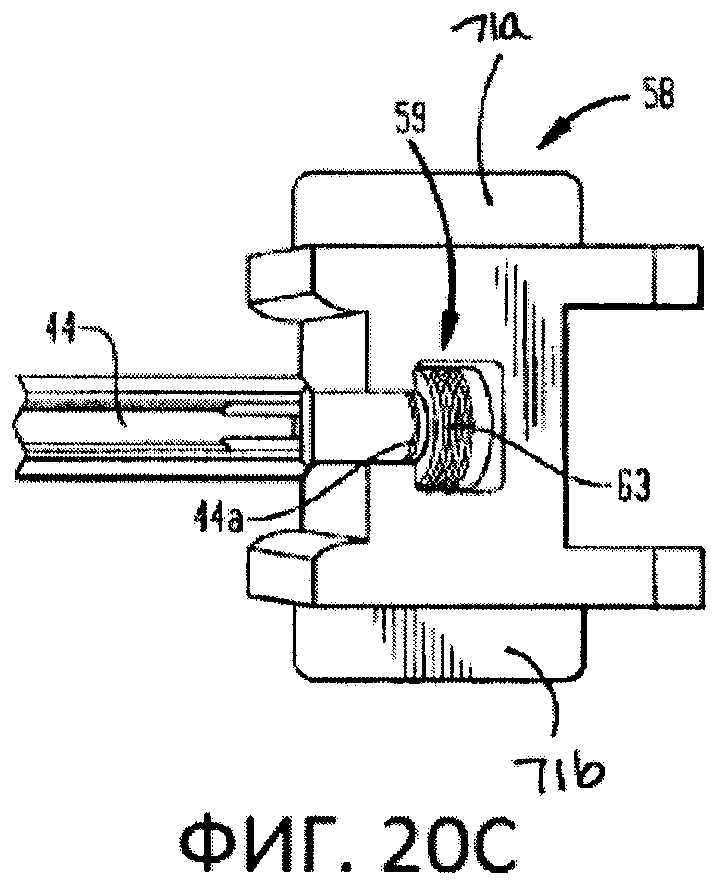
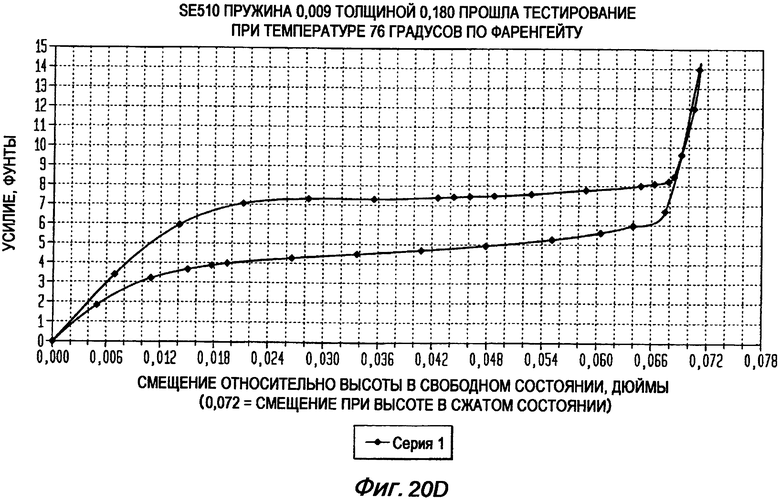
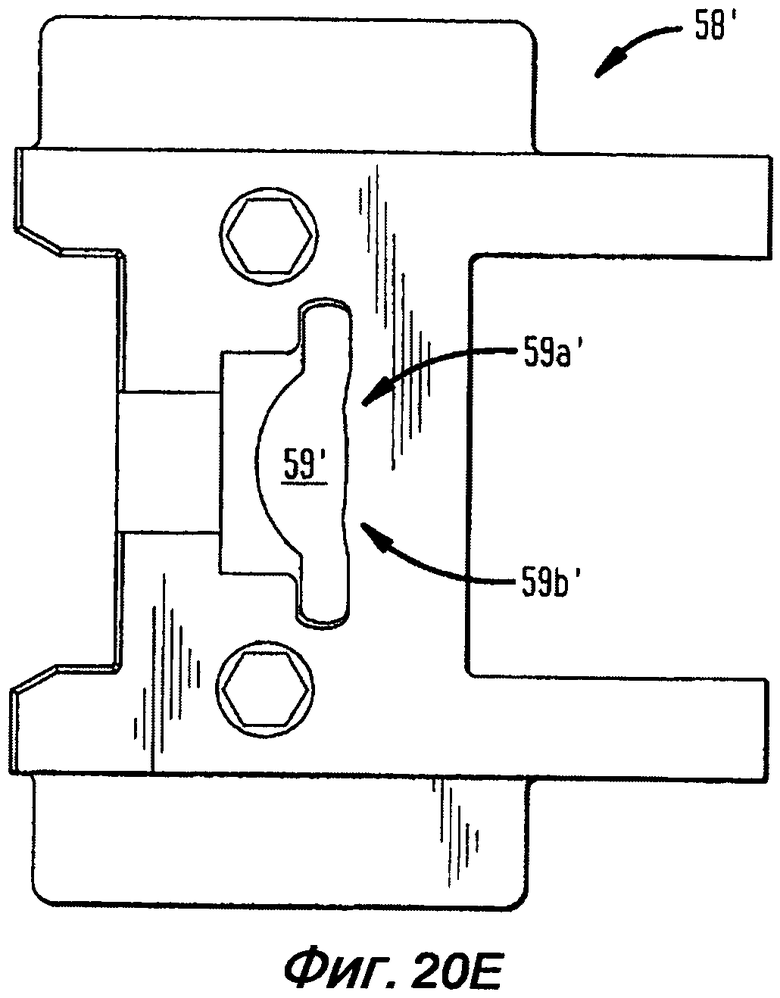
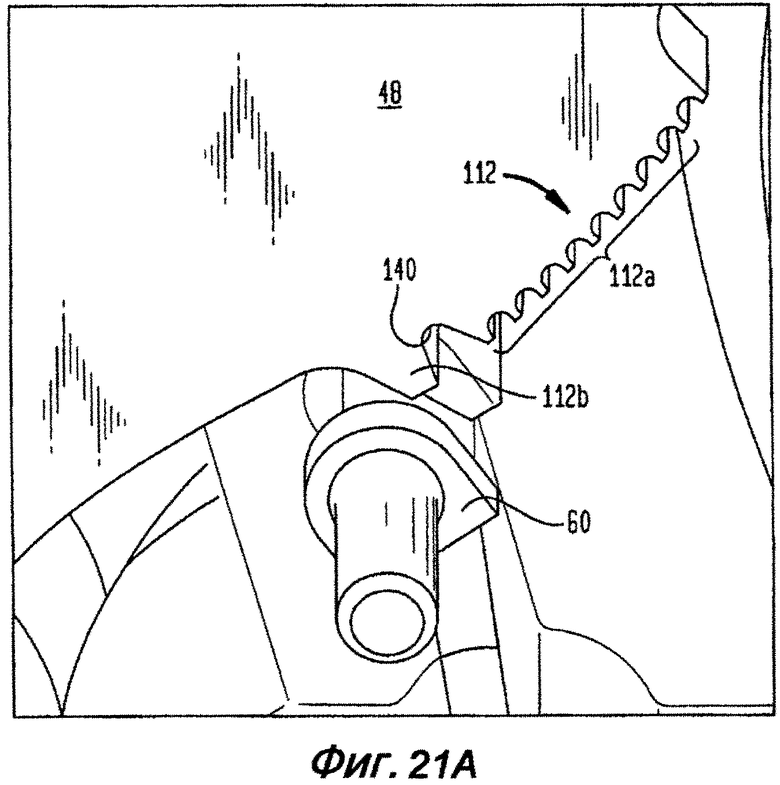
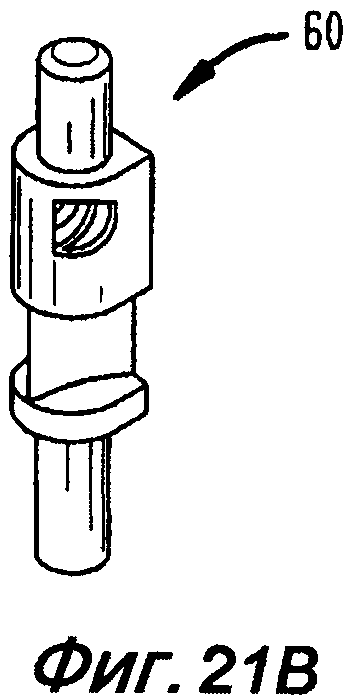
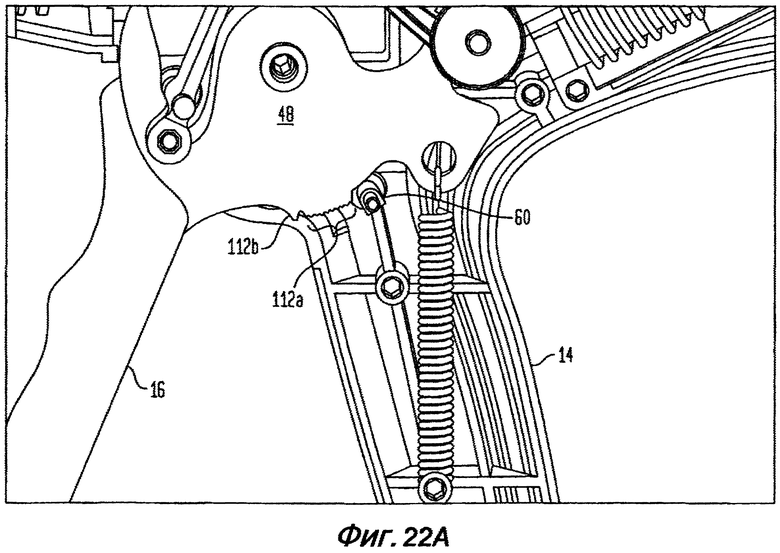
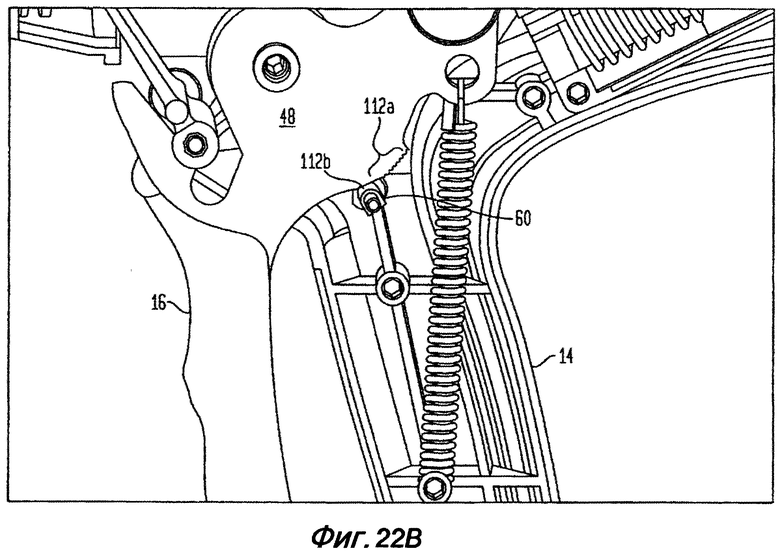
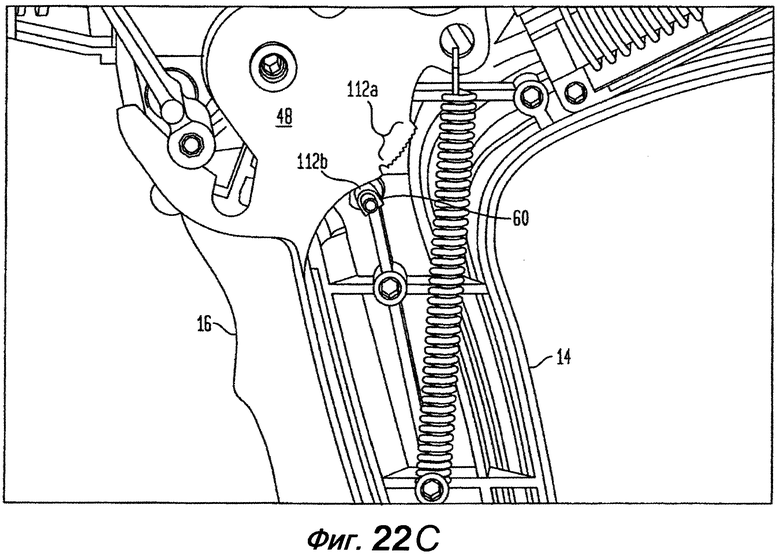
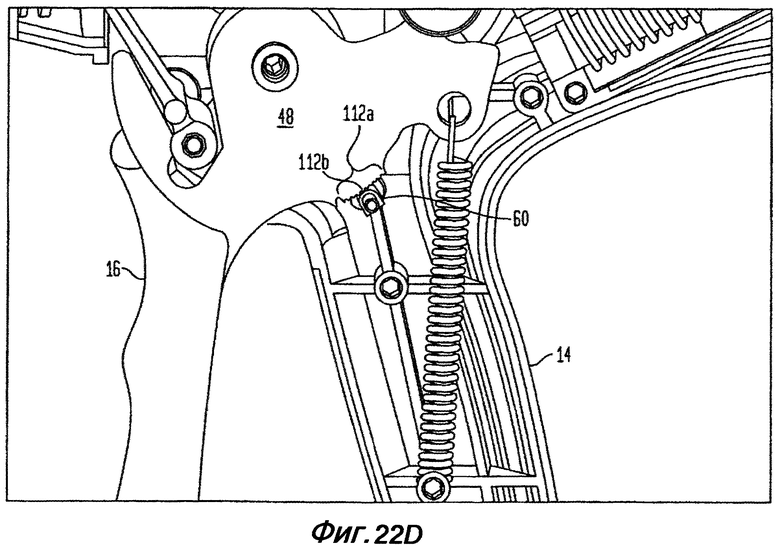
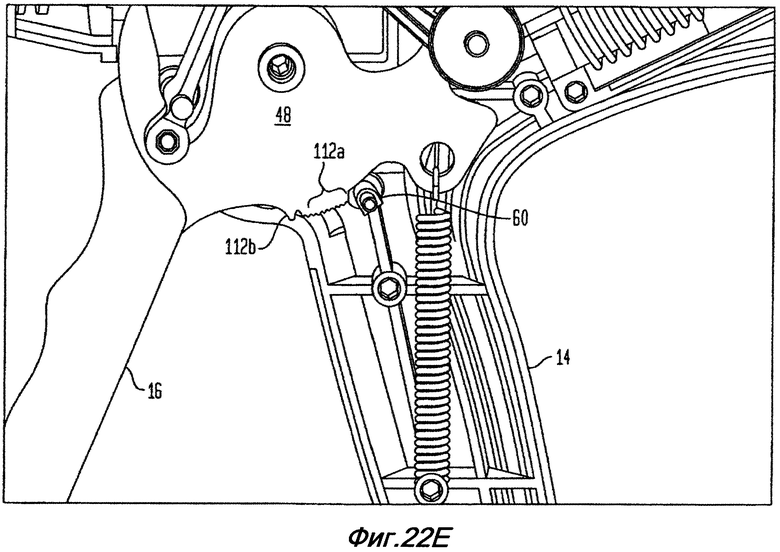
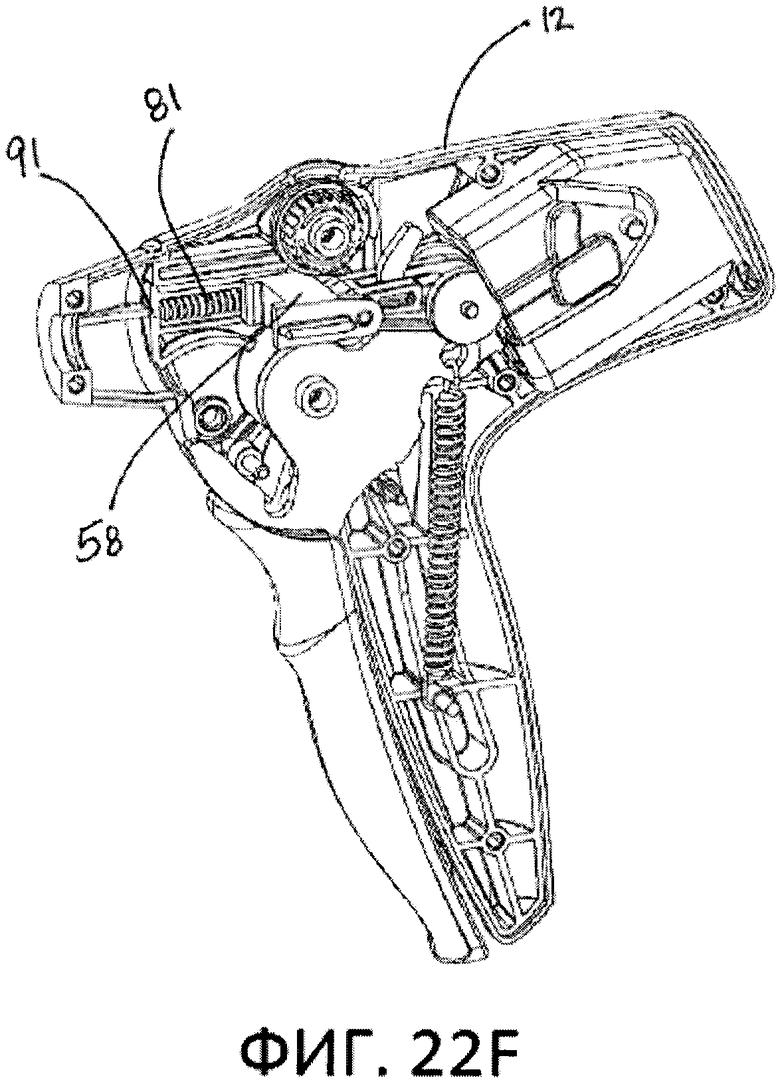
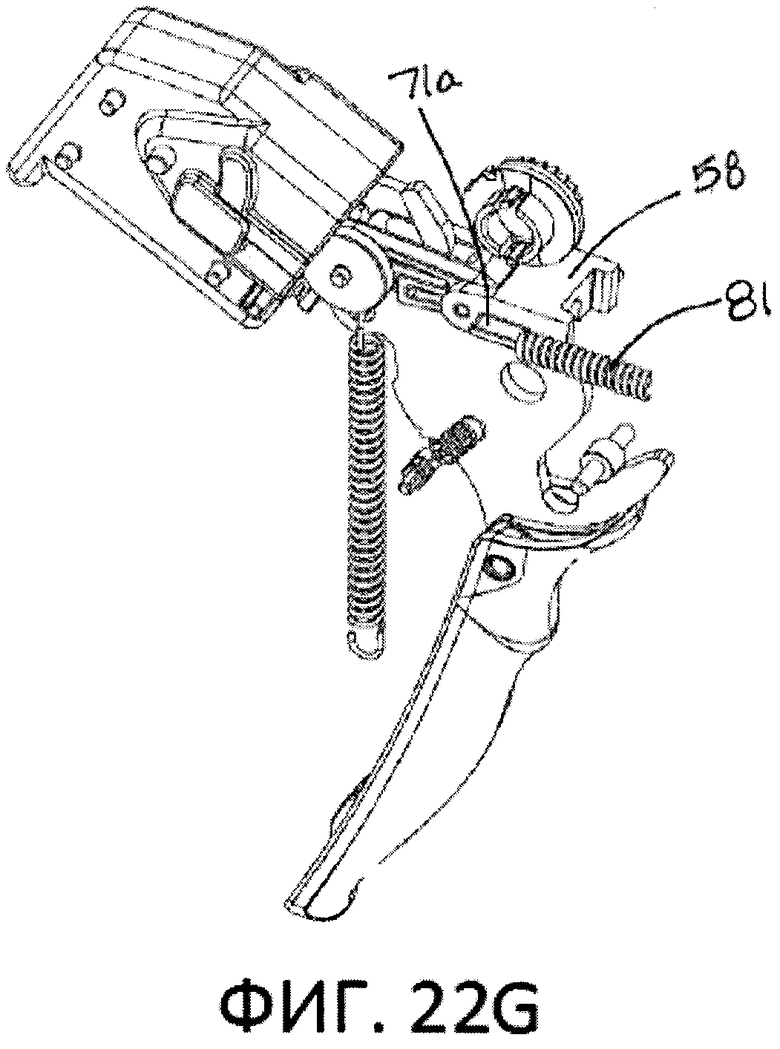

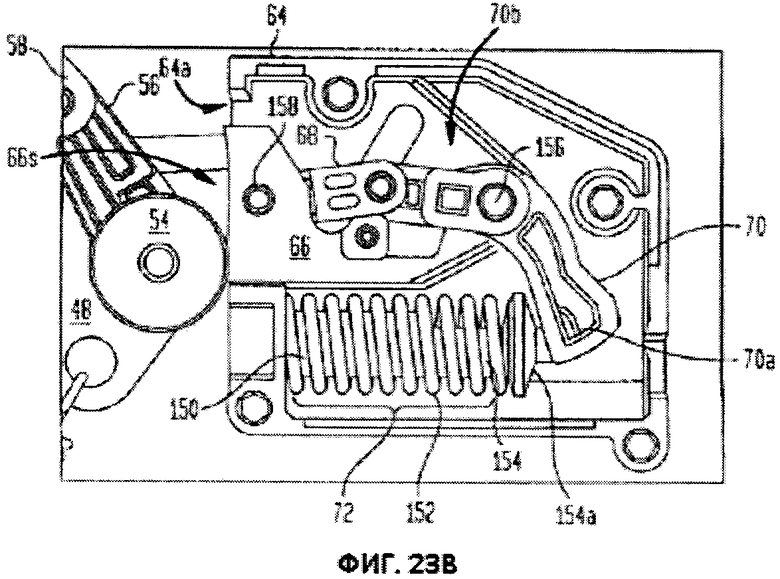
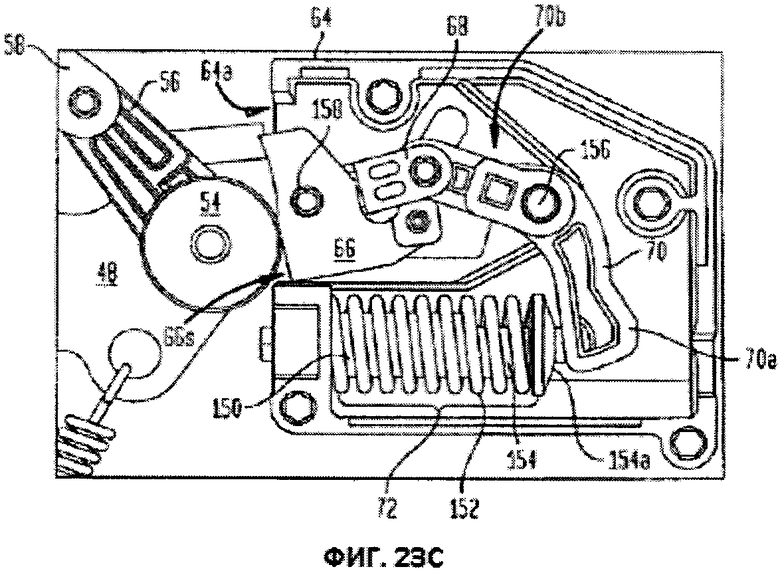
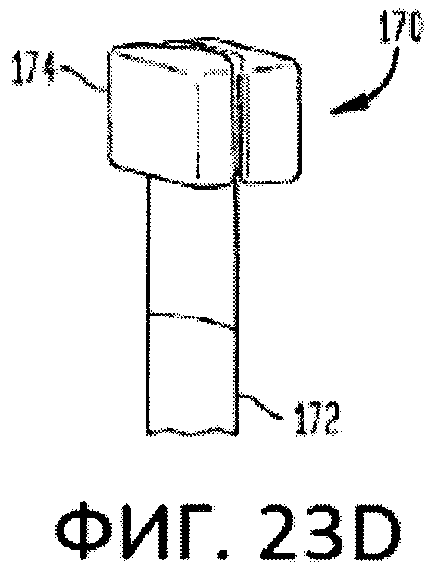
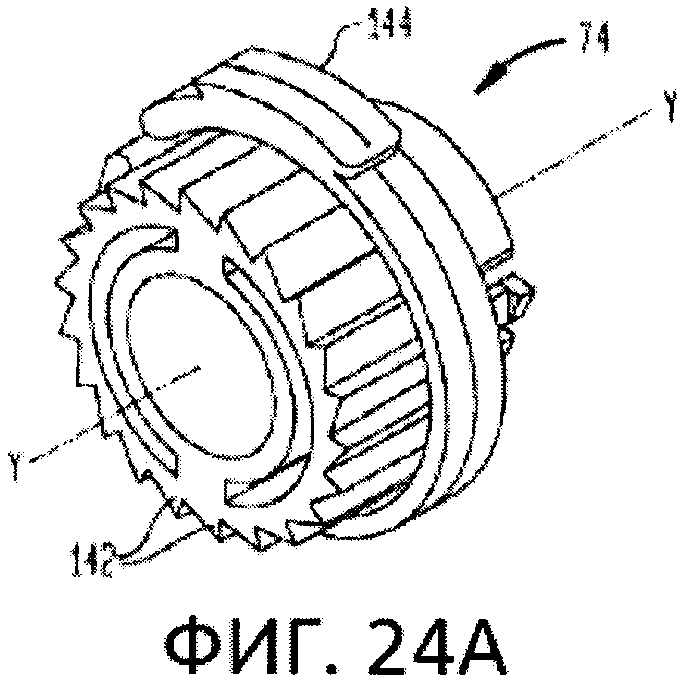
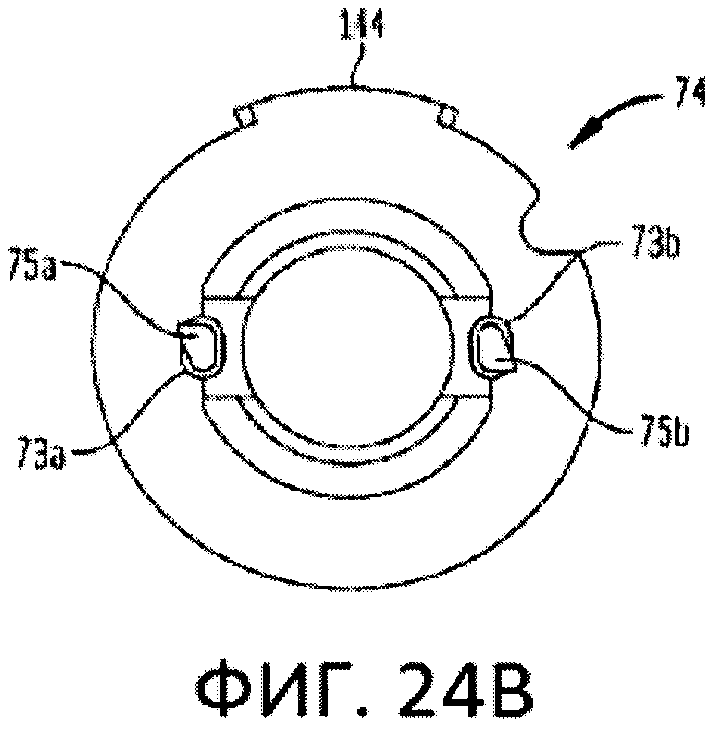
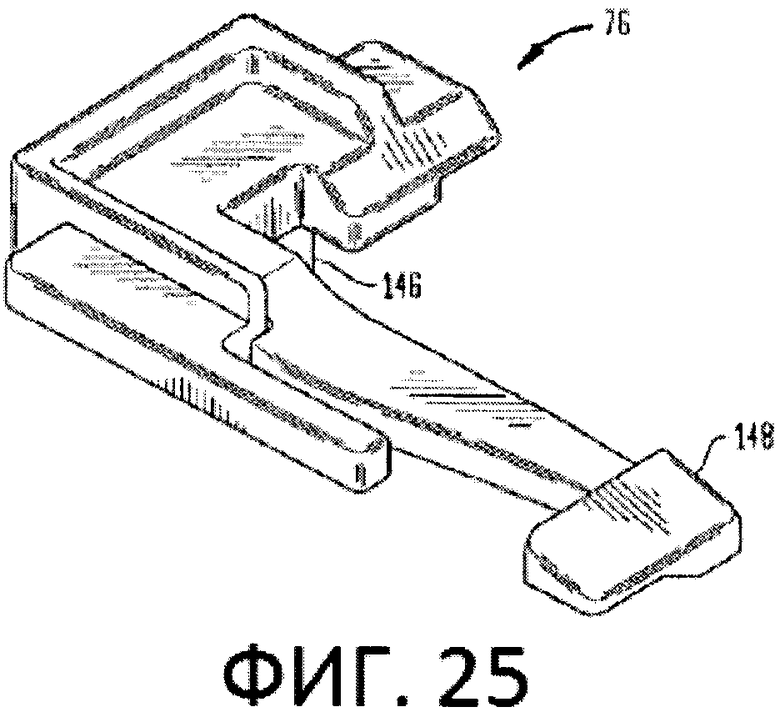
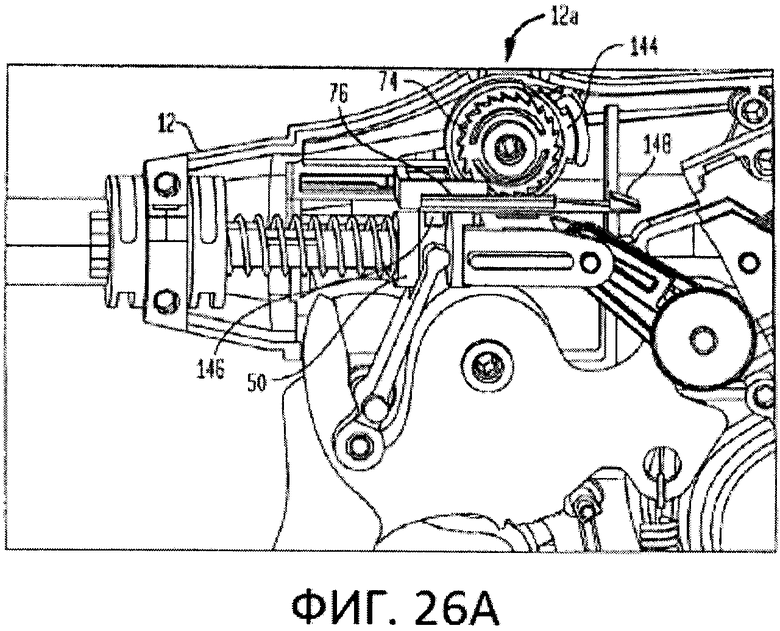
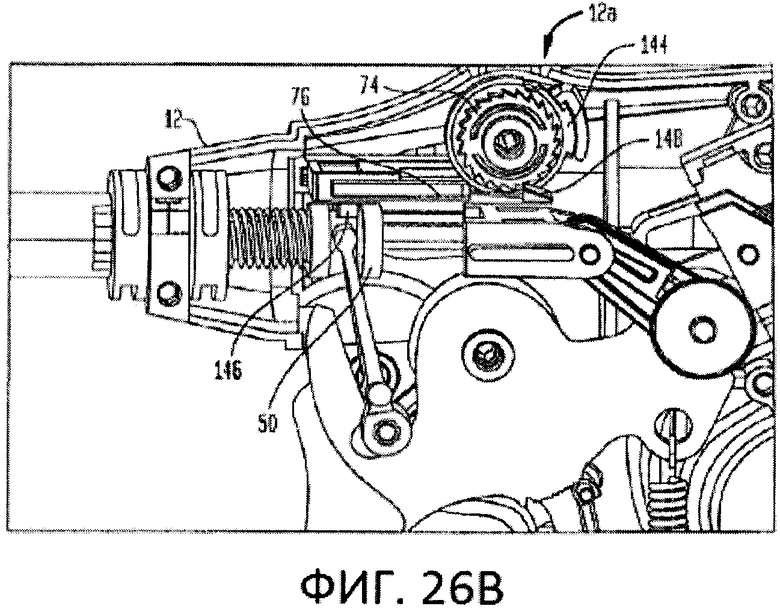
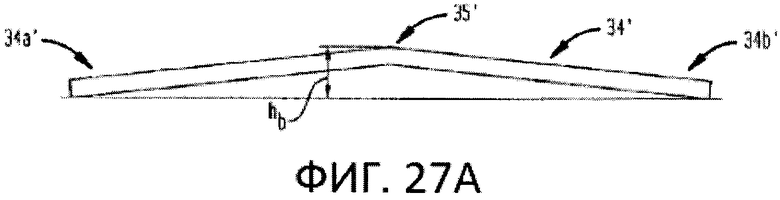
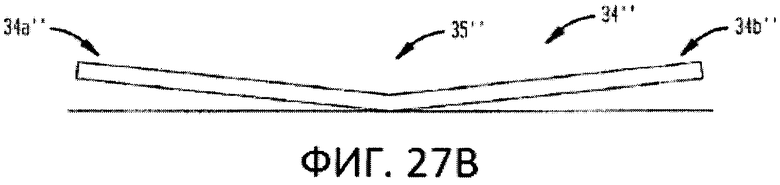
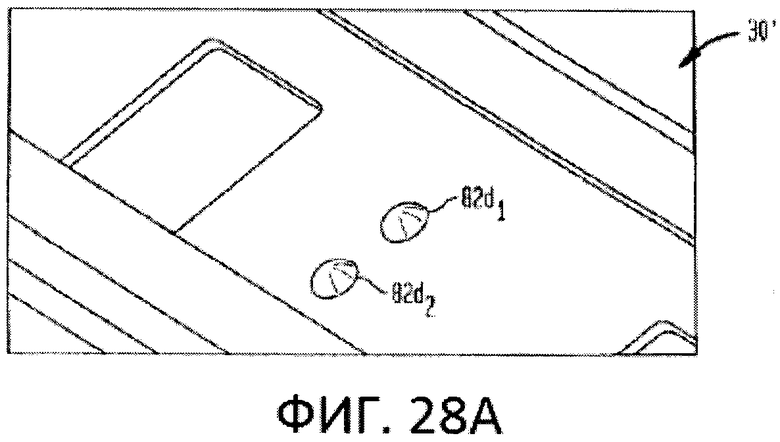
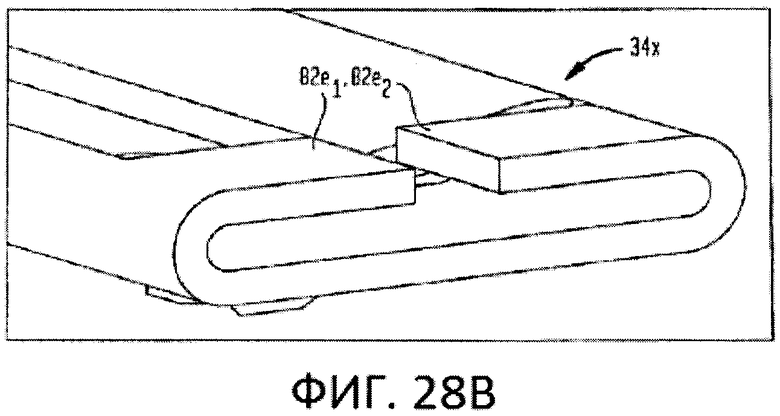
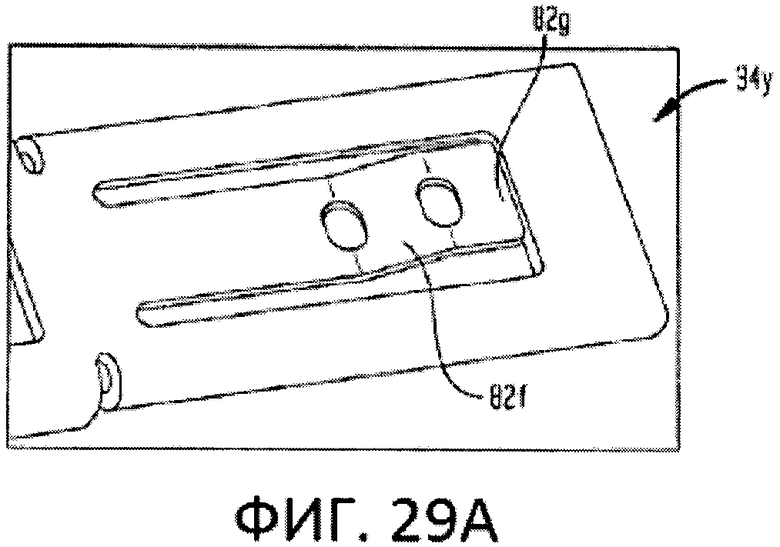
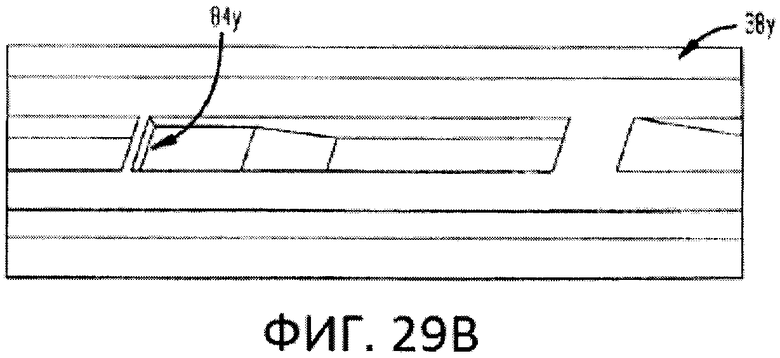
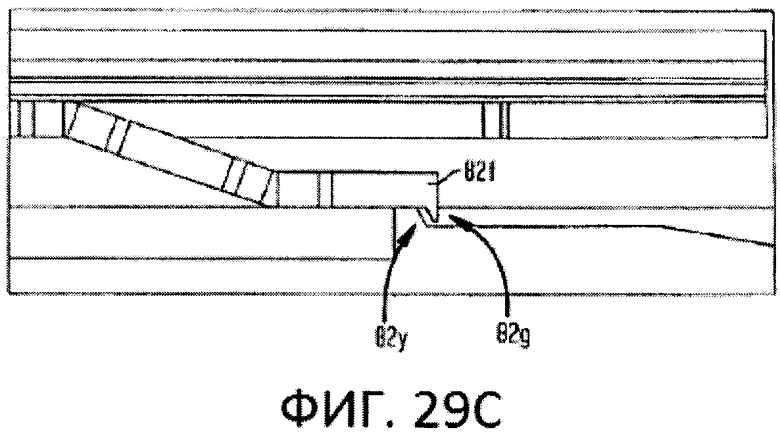
Изобретение относится к медицине и может быть использовано для наложения хирургических клипс на сосуды, каналы, для наложения анастомозов. Хирургический клипсонакладыватель включает ствол, имеющий проксимальный конец и дистальный конец. На дистальном конце ствола находятся противолежащие зажимы. В стволе находится направляющий элемент, выполненный с возможностью направления клипсы к противолежащим зажимам. На поверхности направляющего элемента выполнен канал. Механизм продвижения подвижно установлен в стволе и выполнен с возможностью продвижения клипсы по направляющему элементу в противолежащие зажимы. Механизм продвижения имеет дистальную головку, которая скользит по каналу для поддержания контакта с хирургической клипсой в процессе ее продвижения к противолежащим зажимам. В результате клипса правильно подается в зажимы и не деформируется. 2 н. и 10 з.п. ф-лы, 29 ил.
1. Хирургический клипсонакладыватель, содержащий:
ствол, имеющий проксимальный конец и дистальный конец, на котором находятся противолежащие зажимы;
направляющий элемент, расположенный в стволе и выполненный с возможностью направления клипсы к противолежащим зажимам, при этом на поверхности направляющего элемента выполнен канал и продольно ориентированная канавка, расположенная дистально по отношению к каналу и рядом с дистальным концом направляющего элемента;
механизм продвижения, подвижно установленный в стволе и выполненный с возможностью продвижения клипсы по направляющему элементу в противолежащие зажимы, при этом механизм продвижения имеет дистальную головку, которая скользит по каналу для поддержания контакта с хирургической клипсой в процессе ее продвижения к противолежащим зажимам;
при этом дистальная головка имеет дистальную наружную поверхность, выполненную с возможностью опоры на вершину хирургической клипсы для продвижения этой клипсы к противолежащим зажимам;
при этом высота дистальной наружной поверхности превышает глубину канала, причем дистальная наружная поверхность выполнена с возможностью проходить в канавку, при этом канавка выполнена с возможностью по существу предотвращения бокового смещения дистальной головки.
2. Хирургический клипсонакладыватель по п. 1, в котором канал направляющего элемента содержит сквозное отверстие в направляющем элементе.
3. Хирургический клипсонакладыватель по п. 1, в котором в проксимальной части канала предусмотрена наклонная поверхность, выполненная с возможностью опоры на проксимальную часть дистальной головки, чтобы дистальная часть дистальной головки отклонялась от направляющего элемента при движении механизма продвижения в проксимальном направлении.
4. Хирургический клипсонакладыватель по п. 1, в котором в дистальной части канала предусмотрена наклонная поверхность, выполненная с возможностью опоры на дистальную часть дистальной головки, чтобы дистальная часть дистальной головки отклонялась от направляющего элемента при движении механизма продвижения в дистальном направлении.
5. Хирургический клипсонакладыватель по п. 1, дополнительно содержащий по меньшей мере одну клипсу в стволе, при этом клипса имеет максимальную высоту, измеряемую в поперечном относительно продольной оси ствола направлении, причем дистальная головка имеет максимальную высоту, измеряемую в поперечном относительно продольной оси ствола направлении, причем эта высота превышает высоту по меньшей мере одной клипсы.
6. Хирургический клипсонакладыватель по п. 1, в котором направляющий элемент содержит тканевый упор, имеющий дистальный конец с углублением для приема ткани.
7. Хирургический клипсонакладыватель по п. 1, в котором противолежащие зажимы выполнены с возможностью захвата противоположных ножек хирургической клипсы так, чтобы вершина клипсы находилась на некотором расстоянии над направляющим элементом при продвижении хирургической клипсы в противолежащие зажимы.
8. Способ продвижения клипс в противолежащие зажимы клипсонакладывателя по п. 1, включающий этап, на котором: приводят в действие спусковой крючок, что приводит к перемещению механизма продвижения в стволе в дистальном направлении и контактированию и перемещению в дистальном направлении хирургической клипсы по верхней поверхности направляющего элемента и в противолежащие зажимы клипсонакладывателя, при этом механизм продвижения имеет дистальную головку с дистальной наружной поверхностью, которая позволяет передвигать вершину хирургической клипсы в направлении вверх или вниз, сохраняя при этом контакт с вершиной хирургической клипсы.
9. Способ по п. 8, дополнительно включающий этап, на котором отпускают спусковой крючок для перемещения механизма продвижения в проксимальном направлении, при этом при движении механизма продвижения в проксимальном направлении дистальная головка механизма продвижения может отклоняться вниз, под нижнюю поверхность второй хирургической клипсы.
10. Способ по п. 9, в котором при движении механизма продвижения в проксимальном направлении направляющий элемент может отклонять дистальную головку механизма продвижения вверх, чтобы установить дистальную головку механизма продвижения в положение, проксимальное относительно второй хирургической клипсы.
11. Способ по п. 8, в котором направляющая механизма продвижения имеет продольно ориентированную канавку, обеспечивающую выравнивание дистальной головки механизма продвижения вдоль продольной оси направляющего элемента.
12. Способ по п. 8, в котором конец механизма продвижения остается в контакте с вершиной клипсы, когда клипса формируется между противолежащими зажимами.
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| КРЕПЬ СОПРЯЖЕНИЯ | 0 |
|
SU286921A1 |
| US 6059799 A, 09.05.2000 | |||
| US 5972003 A, 26.10.1999 | |||
| Устройство для наложения скобок | 1982 |
|
SU1429926A3 |

