ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение касается способа стабилизации электрической сети или подсети постоянного тока с шиной постоянного напряжения, например, сети или подсети HVDC (постоянный ток высокого напряжения). Эта сеть может быть бортовой сетью транспортного средства, такого как летательный аппарат или автомобиль, или может обеспечивать питание здания, такого как завод. В настоящей заявке под подсетью следует понимать локальную сеть, принадлежащую к более значительной сети.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Обычно сеть или подсеть постоянного тока содержит источник постоянного напряжения, питающий несколько электрических нагрузок, таких как преобразователи (например, типа инвертора, привода, накопителя энергии (суперконденсатор), синхронной машины с постоянными магнитами и т.д.), которые подключены параллельно к клеммам источника напряжения и каждая из которых предназначена для получения тока или мощности заданного значения. Таким образом, каждая нагрузка может соответствовать отдельному устройству и не обязательно должна сообщаться с другими нагрузками и может иметь свой независимый активный контроль нагрузки.
Сеть или подсеть постоянного тока отличается от распределенной сети переменного тока повышенным влиянием условия, связанного со стабильностью сети постоянного тока и ее нагрузок. Параметры всех нагрузок и самой сети должны быть рассчитаны таким образом, чтобы их соответствующие сопротивления позволяли получить стабильную сеть.
Сеть постоянного напряжения является нестабильной в одной рабочей точке, если сигнал напряжения или тока на клеммах нагрузки колеблется и имеет амплитуду, которая с течением времени возрастает.
Как известно, существуют активный и пассивный методы стабилизации сети или нагрузки.
Пассивная стабилизация нагрузки сети состоит в вычислении ее сопротивления таким образом, чтобы соблюдать критерии стабильности сети. Это выражается в существенном превышении параметров пассивных элементов (резисторов и конденсаторов) сети для обеспечения стабилизации сети в различных конфигурациях. Однако это решение не является удовлетворительным, так как может привести к увеличению размера и массы сети, что является большой проблемой в случае бортовой сети, в частности, в летательном аппарате. Кроме того, это увеличение параметров не соответствует некоторым первоначально предусмотренным условиям, таким как граничная частота фильтра, или другим условиям. Кроме того, добавление нагрузки в такую пассивно стабилизированную сеть может привести к нестабильности сети, даже если сама нагрузка, добавленная в сеть, является стабильной. Это показывает, что стабильность только самих нагрузок еще не обеспечивает стабильности сети, содержащей эти нагрузки, поскольку подсоединение нагрузок к одной и той же шине может привести к ее нестабильности. Другой пассивный метод обеспечения стабильности сети состоит в том, чтобы через ввод значений насыщения в опорные заданные значения нагрузок добиться, чтобы они не потребляли более некоторого значения мощности в сети.
В статье “Stabilization of Constant-Power Load by Passive Impedance Damping”, Céspedes et al., in Applied Power Electronics Conference and Exposition (APEC), 2010 twenty sixth Annual IEEE, стр. 2174-2180, описан метод пассивной стабилизации нагрузки посредством добавления в сеть фильтра, что обеспечивает демпфирование шины постоянного тока и улучшает, таким образом, ее стабильность.
Активная стабилизация нагрузки в выделенной сети состоит в изменении заданного значения управления для повышения стабильности сети. Однако это решение является ограниченным, так как его применяют к простой сети, содержащей только одну нагрузку.
В статье “Active Stabilization of a Poorly Damped Input Filter Supplying a Constant Power Load”, Awan et al., In Proc. ECCE'09 описан способ активной стабилизации нагрузки сети, в котором предложен возврат специфического состояния, основанный на критерии круга. Известна также централизованная стабилизация сети с несколькими нагрузками. При этом сеть содержит устройство стабилизации, которое собирает данные о всей сети и генерирует вектор, содержащий стабилизирующие сигналы каждой нагрузки, и стабилизирует, таким образом, всю сеть.
В статье “Active Stabilization of an HDVC Distribution System with Multiple Constant Power Loads”, Liu et al., IEEE Trans. Industrial Electronics, 2008, 54, № 6 описана активная стабилизация сети посредством включения в нее локальных стабилизаторов.
Однако все известные на данный момент решения активной стабилизации нагрузки или электрической сети на являются полностью удовлетворительными, так как в случае отключения одной из нагрузок сети или в случае переконфигурирования сети перестает обеспечиваться стабилизация сети.
Изобретение призвано предложить простое, эффективное и экономичное решение для устранения этих недостатков.
Оно призвано предложить способ активной и децентрализованной стабилизации сети или подсети постоянного тока.
КРАТКОЕ ОПИСАНИЕ СУЩЕСТВА ИЗОБРЕТЕНИЯ
В связи с этим его объектом является способ стабилизации электрической сети постоянного тока, при этом сеть содержит источник постоянного напряжения, питающий электрические нагрузки, которые подключены параллельно к клеммам источника напряжения и каждая из которых предназначена для получения заданного значения тока или мощности, отличающийся тем, что сеть стабилизируют посредством регулирования заданных значений, применяемых к нагрузкам, при помощи виртуального стабилизационного сопротивления, создаваемого на клеммах каждой нагрузки, причем параметры этих виртуальных сопротивлений рассчитывают таким образом, чтобы стабилизировать сеть в различных необходимых рабочих точках и в различных данных конфигурациях сети, включая состояние, в котором, по меньшей мере, одна нагрузка является неактивной или неисправна, и состояние, в котором стабилизация нагрузки является неактивной, при этом каждое виртуальное сопротивление создают при помощи нелинейного контура регулирования, действующего на заданное значение соответствующей нагрузки.
Согласно другому отличительному признаку изобретения каждое виртуальное сопротивление создают при помощи стабилизационного блока нелинейного контура регулирования, который действует на заданное значение соответствующей нагрузки и который выполнен с возможностью генерирования стабилизационного сигнала pv(t), предназначенного для наложения на заданное значение нагрузки для повышения порога этого заданного значения, сверх которого сеть является нестабильной, при этом стабилизационным сигналом является
pv(t)=vs(t)·Cv·dvs/dt или
pv(t)=K·vs 2-X3
где vs обозначает напряжение на клеммах нагрузки, Cv и K являются параметрами, определяющими стабилизационное виртуальное сопротивление, и Х3 является выходным сигналом фильтра граничной частоты wc, который принимает на входе сигнал K·vs 2, при этом чем больше параметр Cv или K, тем больше стабилизационный сигнал, что повышает порог заданного значения нагрузки или порог максимальной мощности, потребляемой нагрузкой, и обеспечивает стабильность нагрузки.
Cv обозначает виртуальную емкость, а K является коэффициентом коррекции, эквивалентным 1/R, следовательно 1/К выражает виртуальное сопротивление. Таким образом, Cv и K являются параметрами, определяющими виртуальное сопротивление, создаваемое на клеммах нагрузки.
Согласно изобретению сеть постоянного тока стабилизируют посредством децентрализованного подхода за счет применения многоблочной системы стабилизации. Принцип этого подхода состоит в использовании децентрализованной структуры для включения многоблочной системы стабилизации в сеть постоянного тока. Эта система состоит из нескольких независимых локальных блоков стабилизации, установленных на каждой нагрузке системы. Таким образом, систему можно демпфировать перед каждой нагрузкой, ограничивая таким образом локально источники нестабильности. Это позволяет стабилизировать всю сеть. Децентрализованный характер этого подхода способствует надежности системы. Каждый стабилизационный блок не зависит от других и локально находится в сети, при этом между ними не нужно никакого соединения, поэтому сбой в работе одного из них не повлияет на другие. Кроме того, в определенном количестве сценариев неисправностей расчет параметров всех блоков позволяет обеспечивать стабильность системы.
Предпочтительно каждый контур регулирования использует нелинейное правило регулирования, согласно которому генерируют выходной сигнал типа K·f(x), где x является переменной управления нагрузкой, и К является коэффициентом коррекции именно для этой нагрузки, при этом коэффициенты коррекции (K1, K2, …, Kn) определяют посредством осуществления этапов, на которых:
а) определяют математическую модель электрической сети, при этом модель включает в себя уравнения, содержащие вышеуказанные коэффициенты коррекции (K1, K2, …, Kn) для обеспечения стабильности нагрузок и сети;
b) определяют условия, соблюдаемые таким образом, чтобы сеть оставалась стабильной, в частности, во время переконфигурирования сети или отключения, по меньшей мере, одной нагрузки; и
с) определяют оптимальный вектор коэффициентов коррекции при помощи алгоритма оптимизации, предназначенного для проверки соблюдения вышеуказанных условий для данного вектора, и вычисляют целевую функцию стабилизации с этим вектором, затем эти этапы повторяют, пока вектор не будет удовлетворять необходимым для соблюдения условиям.
Способ в соответствии с изобретением позволяет обеспечивать стабильность сети или подсети постоянного тока за счет стабилизации нагрузок этой сети или подсети, причем для рабочих точек, определяемых при любой конфигурации и/или неисправностях сети. Стабилизация каждой нагрузки учитывает влияние каждой нагрузки на стабилизацию общей сети. Способ в соответствии с изобретением позволяет увеличивать в меньшей степени или совсем не увеличивать параметры пассивных элементов сети за счет создания виртуального сопротивления (например, резистора или конденсатора) на входе каждой нагрузки, позволяющего обеспечивать стабилизацию нагрузок и всей сети. Это виртуальное сопротивление предназначено для ослабления нарушений, которые могут появляться в сети или на клеммах нагрузки, и ее «размерность» определяют таким образом, чтобы стабилизировать сеть в различных необходимых рабочих точках, в различных данных конфигурациях сети и в случае, когда, по меньшей мере, одна нагрузка не работает (то есть деактивирована или неисправна).
Создаваемое на клеммах каждой нагрузки виртуальное сопротивление получают посредством регулирования заданного значения управления нагрузкой при помощи нелинейного правила и заранее определенного коэффициента коррекции. Вектор, содержащий оптимальные коэффициенты коррекции всех нагрузок, определяют таким образом, чтобы соблюдать вышеуказанные условия и чтобы можно было реализовать целевую функцию.
Этап а) может, например, состоять в определении нелинейной модели сети и в ее линеаризации вокруг рабочей точки или в выражении ее определителя Якоби.
Соблюдаемые условия на этапе b) могут включать в себя интервалы допустимых значений для коэффициентов коррекции и поддержание стабилизации в случае переконфигурирования сети в случае сбоя стабилизации, по меньшей мере, одной нагрузки и в случае колебаний или неточностей в значениях параметров самой сети.
Учет этих колебаний или неточностей в значениях параметров сети позволяет определить запас робастности и безопасности для стабильности.
Предпочтительно математическая модель включает в себя уравнения, характеризующие сеть в отсутствие одной или нескольких нагрузок и/или в отсутствие стабилизации одной или нескольких нагрузок.
Таким образом, стабилизация остается надежной при неисправностях и при переконфигурировании сети без идентификации конфигурации в реальном времени и без изменения используемых параметров регулирования/стабилизации.
Алгоритм оптимизации, применяемый на этапе с), предназначен, например, для сравнения вычисления целевой функции с одним вектором с вычислением этой функции с другим вектором, в котором коэффициенты коррекции являются минимальными возможными, затем эти этапы повторяют, пока рассматриваемый вектор не минимизирует определенную целевую функцию. Ее выбирают таким образом, чтобы направить усилия стабилизации на сеть по выбору конструктора (например, минимум на приводы, максимум на накопители). Можно использовать любой алгоритм обусловленной оптимизации (генетический, метод градиента и т.д.).
Объектом настоящего изобретения является также электрическая сеть типа сети постоянного тока, содержащая источник напряжения, питающий электрические нагрузки, которые подключены параллельно к клеммам источника напряжения и каждая из которых предназначена для получения заданного значения тока или мощности, отличающаяся тем, что каждую нагрузку стабилизируют посредством регулирования ее заданного значения при помощи стабилизационного блока, вход которого соединен со средствами измерения напряжения на клеммах нагрузки и выход которого соединен с клеммой приложения заданного значения нагрузки сумматором, соединенным также со средствами передачи заданного значения.
Согласно изобретению в контур регулирования каждой нагрузки включен локальный стабилизационный блок. Присутствие в сети нескольких локальных стабилизационных блоков приводит к уменьшению количества проводов, необходимых для передачи данных (измерения, опорное значение стабилизирующего сигнала), по сравнению с использованием в сети только одного стабилизационного блока (при централизованной стабилизации), который необходимо соединять с большим количеством датчиков для передачи всех измерений в этот блок. Включение локальных стабилизационных блоков в сеть позволяет также уменьшить количество применяемых датчиков, поскольку необходимо знать только значения напряжения на клеммах нагрузок.
Стабилизационный блок выделяет из напряжения высокочастотную составляющую, то есть он должен отфильтровывать ее постоянную составляющую. Например, эту фильтрацию можно осуществлять при помощи фильтра нижних частот и схемы вычитания, при этом вход фильтра соединен с вышеуказанными средствами измерения, а его выход соединен со схемой вычитания, которая предназначена для вычитания выходного сигнала фильтра из сигнала, поступающего от средств измерения. В варианте можно использовать фильтры высоких частот или полосно-пропускающие фильтры.
В варианте выполнения изобретения каждое виртуальное сопротивление генерируют при помощи преобразователя, питающего нагрузку (такого как инвертор, повышающий или понижающий трансформатор…), с использованием стабилизационного блока, генерирующего возврат нелинейного состояния, которое передают в преобразователь с наложением на заданное значение соответствующей нагрузки. Стабилизационный блок выполнен с возможностью генерирования стабилизационного сигнала pv(t), предназначенного для наложения на заданное значение нагрузки для повышения порога максимальной мощности, которую нагрузка может потреблять в сети, сверх которого сеть является нестабильной, при этом стабилизационным сигналом является
pv(t)=vs(t)·Cv·dvs/dt или
pv(t)=K·vs 2-X3
где vs обозначает напряжение на клеммах преобразователя мощности, управляющего нагрузкой, Cv и K являются параметрами, определяющими стабилизационное виртуальное сопротивление, и Х3 является выходным сигналом фильтра граничной частоты wc, который принимает на входе сигнал K·vs 2, при этом чем больше параметр Cv или K, тем больше стабилизационный сигнал, что повышает порог максимальной мощности, которую может потреблять нагрузка в сети, и обеспечивает стабильность взаимодействия между нагрузкой и сетью.
В математическую модель вышеуказанной электрической сети можно включить возвраты стабилизирующих состояний.
Объектом настоящего изобретения является также транспортное средство, такое как летательный аппарат, отличающееся тем, что содержит описанную выше стабилизированную электрическую сеть.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение и его другие детали, преимущества и отличительные признаки будут более очевидны из нижеследующего описания, представленного в качестве неограничительного примера, со ссылками на прилагаемые чертежи, на которых:
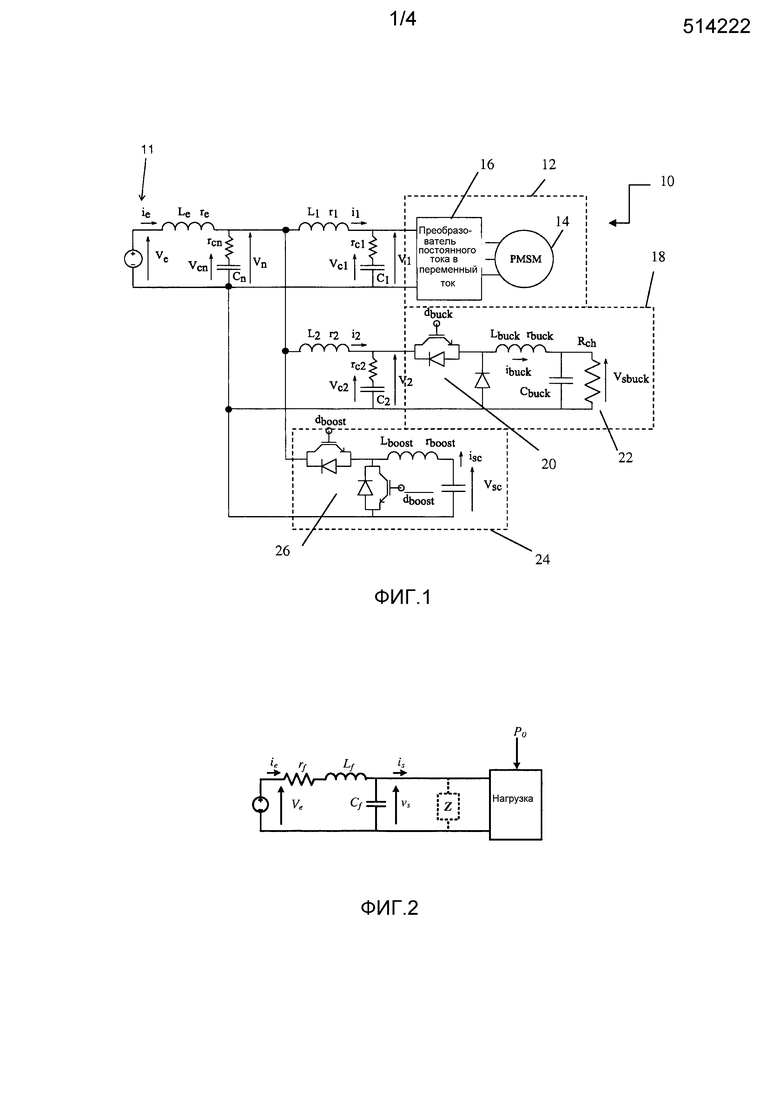
Фиг. 1 - архитектура электрической сети постоянного тока, содержащей источник постоянного напряжения и три нагрузки.
Фиг. 2 - вид упрощенной электрической сети постоянного тока, содержащей источник напряжения и одну нагрузку, которую активно стабилизируют посредством создания виртуального сопротивления Z на ее клеммах.
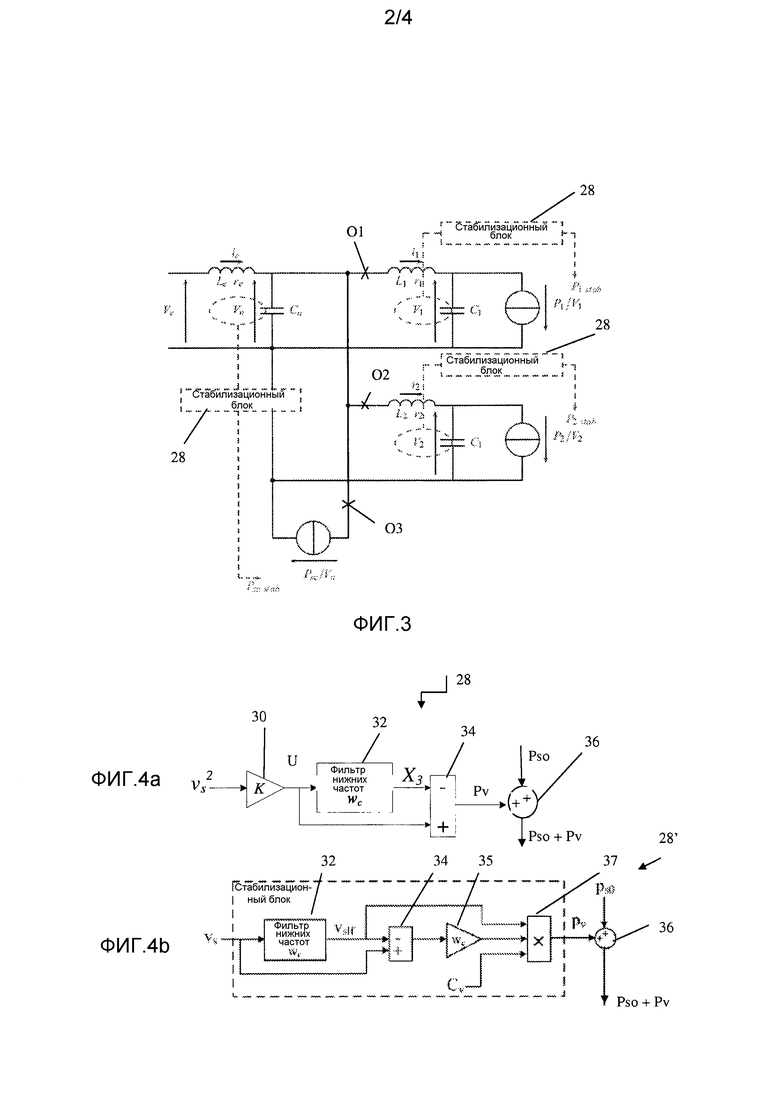
Фиг. 3 - электрическая сеть постоянного тока, аналогичная показанной на фиг. 1 и содержащая локальные стабилизационные блоки, предназначенные для виртуального создания сопротивлений для стабилизации нагрузок.
Фиг. 4а и 4b - блок стабилизации нагрузки сети постоянного тока.
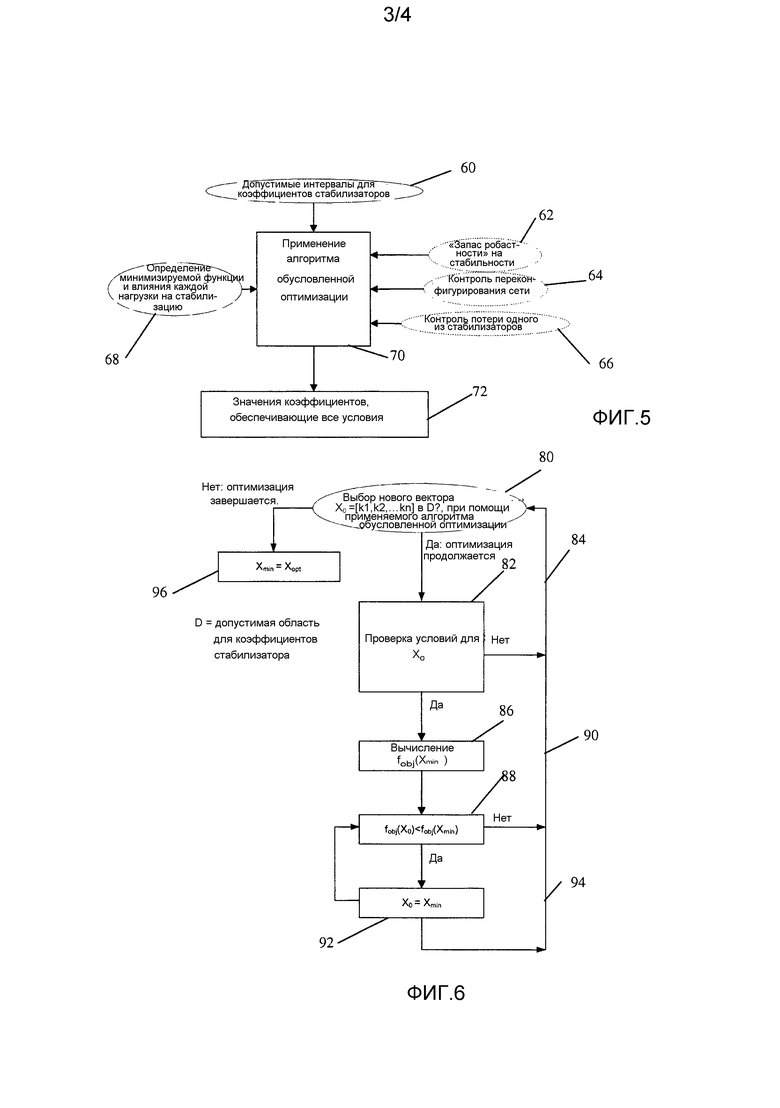
Фиг. 5 и 6 - блок-схемы этапов способа в соответствии с изобретением.
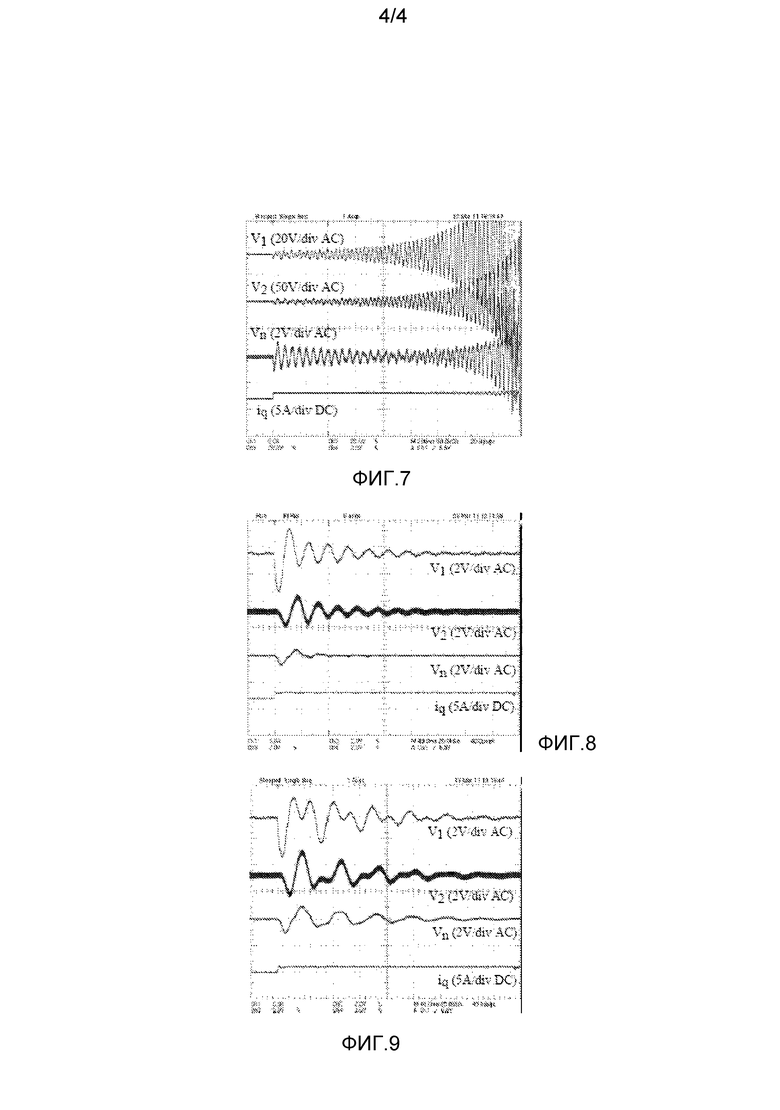
Фиг. 7 - график, иллюстрирующий изменение напряжения шины постоянного тока на трех нагрузках сети, показанной на фиг. 1, в ответ на ступенчатое изменение мощности, когда эти три нагрузки не стабилизированы.
Фиг. 8 и 9 - графики, иллюстрирующие изменение напряжения шины постоянного тока на трех нагрузках сети, показанной на фиг. 3, в ответ на ступенчатое изменение мощности, когда эти три нагрузки стабилизированы в случае, показанном на фиг. 8, и когда стабилизированы только две нагрузки, при этом в случае, показанном на фиг. 9, стабилизирующая функция одной нагрузки не работает.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВОПЛОЩЕНИЯ
На фиг. 1 показана электрическая сеть постоянного тока 10, которая может быть бортовой сетью транспортного средства, такого как летательный аппарат, при этом сеть содержит источник 11 постоянного напряжения, выходные клеммы которого соединены параллельно с входными клеммами трех разных нагрузок.
Первая нагрузка 12 включает в себя синхронную машину 14 с постоянными магнитами (MSAP или PMSM, сокращение от Permanent Magnet Synchronous Machine), питаемую от трехфазного инвертора 16, регулируемого по крутящему моменту через классическое векторное управление d-q.
Вторая нагрузка 18 включает в себя преобразователь 20 постоянного тока в постоянный, питающий простой резистор 22, при этом весь узел регулируют по мощности таким образом, чтобы нагрузка потребляла идеально контролируемую в сети мощность.
Третья нагрузка 24 представляет собой суперконденсатор (SC), который подключен к сети через другой преобразователь 26 постоянного тока в постоянный с двойным направлением тока. Узел тоже регулируют по мощности. Таким образом, можно управлять обменами мощности между суперконденсатором SC и сетью.
Напряжение шины постоянного тока равно vn, и напряжения на клеммах трех нагрузок равны v1, v2 и vn.
Сеть или подсеть постоянного тока в соответствии с изобретением представляет собой шкаф типа ЕВАС, подсеть ELS (Landing Gear System) или EFCS (Flight Control System), первичный распределительный шкаф PRIMES и т.д.
Нагрузки сети 10 являются в достаточной степени контролируемыми, чтобы их можно было считать работающими с постоянной мощностью. Входное напряжение Ve тоже считается неизменным. Стабильность одной нагрузки можно исследовать индивидуально, прежде чем перейти к случаю, когда все три нагрузки подключены к сети. Стабильность каждой нагрузки можно исследовать путем изучения частотных следов Найквиста FTBO систем для каскадных конфигураций (1 нагрузка). Стабильность общей сети (3 нагрузки) оценивают путем исследования нулей знаменателя переходной функции, которая для каждой нагрузки является переходной функцией отношения напряжения vs на клеммах нагрузки (v1, v2 или vn) к входному напряжению Ve (Vs/Ve). Полученные результаты можно подтвердить посредством моделирования, что будет описано ниже.
Как было указано выше, электрические конфигурации сетей могут быть нестабильными, если заданное значение управления (например, мощности) нагрузки превышает определенный порог. Этот предел мощности определяется структурой сети, а также ее составом, то есть значениями параметров ее компонентов. Известно, что значения пассивных элементов, таких как конденсаторы, резисторы или катушки индуктивности, меняются в зависимости от нескольких параметров, которые не всегда являются контролируемыми и/или постоянными. В качестве примера можно взять температурные колебания или износ, которые влияют на электрические свойства систем. Все это приводит к изменению свойств стабильности системы, которые могут привести ее в состояние нестабильности. Чтобы противостоять этому нежелательному явлению, изобретением предлагается определять соответствующие команды, которые будут генерировать так называющие стабилизирующие сигналы, накладываемые на контрольные значения нагрузок и позволяющие обеспечивать полностью или повышать стабильность системы. Предпочтительно эти сигналы являются нулевыми в непрерывном режиме, чтобы не искажать или не изменять заданные значения, выбираемые пользователем или необходимые для первоначальной рабочей точки.
Изменение заданных параметров нагрузок приводит к изменению рабочей точки сети. Иначе говоря, для каждой рабочей точки сети определяют заданные параметры различных нагрузок. Например, определяют рабочую точку, соответствующую iq=7 А, P2=500 Вт, Psc=0 Вт.
Способ в соответствии с изобретением позволяет увеличивать в меньшей степени или вовсе не увеличивать размерность пассивных элементов сети за счет создания виртуального сопротивления Z (конденсатор, резистор или другой элемент) на входе каждой нагрузки, позволяющего стабилизировать нагрузки и всю сеть (фиг. 2). Это виртуальное сопротивление предназначено для ослабления возмущений, которые могут появляется в сети или на клеммах нагрузки, и его «размерность» определяют таким образом, чтобы стабилизировать сеть в разных необходимых рабочих точках, в разных данных конфигурациях и в случае, когда, по меньшей мере, одна нагрузка не работает (то есть деактивирована или вышла из строя).
Согласно изобретению стабилизационное сопротивление каждой нагрузки генерируют при помощи стабилизационного блока 28 (фиг. 3), который действует непосредственно на контур заданного значения нагрузки, чтобы регулировать это заданное значение и обеспечивать стабильность, в частности:
- корректируя колебания заданного значения между разными выбранными рабочими точками;
- обеспечивая стабильность сети, если, по меньшей мере, один из стабилизационных блоков перестал быть активным; и
- обеспечивая стабильность сети, если, по меньшей мере, одна из нагрузок отключена (переконфигурирование сети).
Показанный на фиг. 4а стабилизационный блок 28 позволяет генерировать виртуальное сопротивление на клеммах нагрузки. Блок 28 содержит средство 30 умножения напряжения vs, измеряемого на клеммах нагрузки, на коэффициент усиления или коэффициент коррекции К (эквивалентный 1/R), прямо пропорциональный амплитуде стабилизирующего сигнала, для получения сигнала U. Вход фильтра 32 нижних частот граничной частоты wc соединен с выходом средства 30 и принимает, таким образом, сигнал U. Выходной сигнал Х3 вычитают из сигнала U при помощи схемы вычитания 34. Выходной сигнал Pv схемы вычитания суммируют с сигналом Pso заданного значения нагрузки при помощи сумматора 36, выход которого соединен с нагрузкой.
Размерность импульса или граничной частоты wc определяют таким образом, чтобы локальные стабилизаторы воспринимали только изменения напряжения, при этом их постоянные составляющие удаляются. Выбранное числовое значение должно учитывать тот факт, что все частоты, близкие к резонансным частотам, генерируемым фильтрами внутренних соединений всей сети, должны учитываться каждым локальным стабилизационным блоком. Вариант выполнения стабилизационного блока 28′, показанного на фиг. 4b, позволяет генерировать виртуальную емкость Cv на клеммах нагрузки. Этот блок 28′ содержит также фильтр 32 нижних частот граничной частоты wc, который на входе принимает напряжение vs шины постоянного тока и выход которого обозначен vslf. Схема вычитания 34 позволяет вычесть фильтрованный сигнал vslf из сигнала vs. Выходной сигнал схемы вычитания 34 соответствует высокочастотному колебанию, которое умножают на импульсную частоту фильтра нижних частот при помощи средства 35 умножения коэффициента усиления wc. Выходной сигнал средства 35 и сигнал vslf поступают в дополнительное средство 37 умножения для получения регулируемого сигнала мощности pv в зависимости от виртуальной емкости Cv, генерируемой на клеммах нагрузки.
Математическая модель для изучения стабильности напряжения шины постоянного тока нагрузки, показанной на фиг. 2 (при которой Ps=Pso является входной или заданной мощностью нагрузки для рабочей точки (ieo, vso); при этом считается, что Pso=vso·ie0 является константой), можно выразить следующим образом:
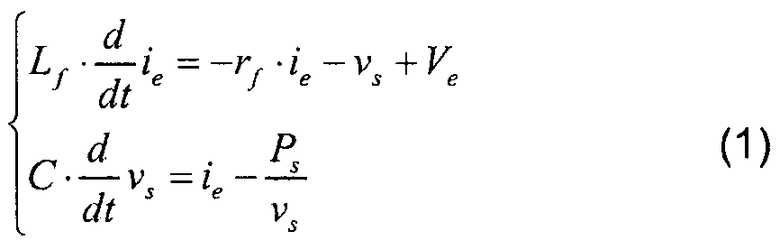
где Lf обозначает индуктивность, ie обозначает ток, выдаваемый источником напряжения Ve, rf обозначает сопротивление, vs обозначает напряжение на клеммах нагрузки, Ve обозначает напряжение, C или Cf обозначает емкость конденсатора, который образует вместе с катушкой индуктивности Lf фильтр LC.
Для упрощения этой модели считается, что управление нагрузкой является эффективным и что, следовательно, колебания напряжения шины постоянного тока мало влияют или не влияют на токи управления нагрузкой.
Анализ стабильности сигнала нагрузки, показанной на фиг. 2, можно осуществлять посредством исследования полюсов математической модели, локально линеаризованной вокруг рабочей точки. Это приводит к следующим критериям, которые дают максимальную допустимую мощность нагрузки для стабильной рабочей точки:
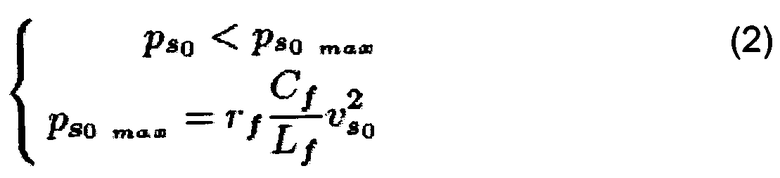
где vso является напряжением на клеммах нагрузки для рассматриваемой рабочей точки.
В случае когда заданная мощность (Pso) нагрузки может достигать Pso max, эта нагрузка не будет стабильной. Таким образом, Psomax представляет собой порог, которого не должно достигать заданное значение Pso. Как следует из вышеуказанных уравнений, Psomax прямо пропорциональна емкости С. Увеличение этой емкости посредством добавлении дополнительной виртуальной емкости на клеммах нагрузки позволяет увеличить порог Pso max.
На практике эту виртуальную емкость генерируют путем добавления дополнительной мощности Pv к заданной мощности Ps, причем эта дополнительная мощность отвечает следующей формуле и выражает сигнал стабилизации нагрузки, выдаваемый стабилизационным блоком (если Pv=0, нагрузка не стабилизирована):

где Cv является емкостью виртуального конденсатора, генерируемого на входе нагрузки стабилизационным блоком, и iv является током, проходящим через этот конденсатор.
Чтобы определить влияние стабилизационного тока на сопротивление, необходимо ввести дополнительный ток iv на клеммах нагрузки в вышеуказанную модель. Для этого модель включает в себя фильтрованную производную измерения напряжения шины (vs) и представляет собой модель типа:
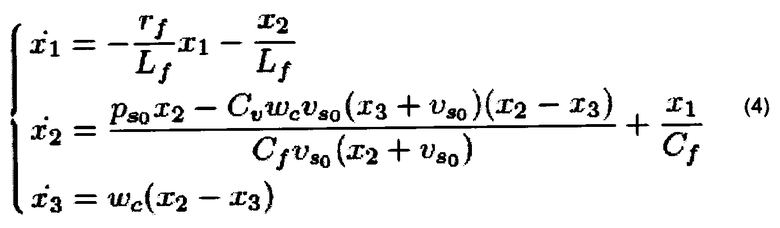
Эти уравнения представляют собой математическую модель сети, показанной на фиг. 2, стабилизированной при помощи стабилизационного блока, в которой переменными состояния являются:
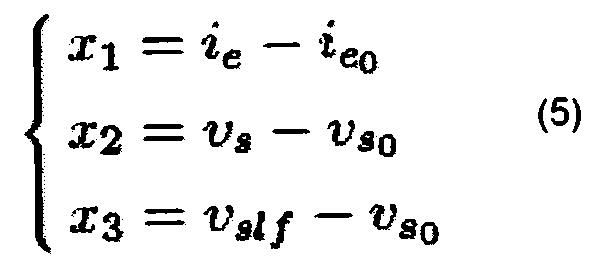
со следующими параметрами в рабочей точке (ieo, vso):
где для фильтра первого порядка vslf является дополнительной переменной состояния.
Вышеуказанные переменные состояния х1, х2 и х3 зависят от измеряемых физических параметров или данных сети.
Для стабилизации нагрузки можно также предложить следующее правило стабилизации, в котором К является коэффициентом коррекции (1/К выражает виртуальное сопротивление, при этом К эквивалентен 1/R), определяемым для стабилизации нагрузки: U=K·vs 2 и pv(t)=R·vs 2-X3 (см. фиг. 4а).
pv(t)=R·vs 2-X3 представляет собой сигнал стабилизации нагрузки в случае, представленном на фиг. 4а для широкого сигнала, при этом данный сигнал выражен в виде K·f(t) вокруг данной рабочей точки.
Определение параметров К зависит, в частности, от архитектуры сети и от числа активных нагрузок этой сети. Эти параметры определяют, с одной стороны, посредством решения набора матриц, определяющих сеть, и, с другой стороны, в зависимости от различных необходимых рабочих точек, от различных возможных конфигураций и от критериев минимизации влияния динамических характеристик на нагрузки.
Правило стабилизации включает в себя ослабление сигнала и учитывает необходимость устранения не демпфированных колебаний. Поскольку это ослабление необходимо только вокруг рабочей точки, оно должно сопровождаться соответствующим фильтром, например фильтром нижних частот, как показано на фиг. 4а и 4b.
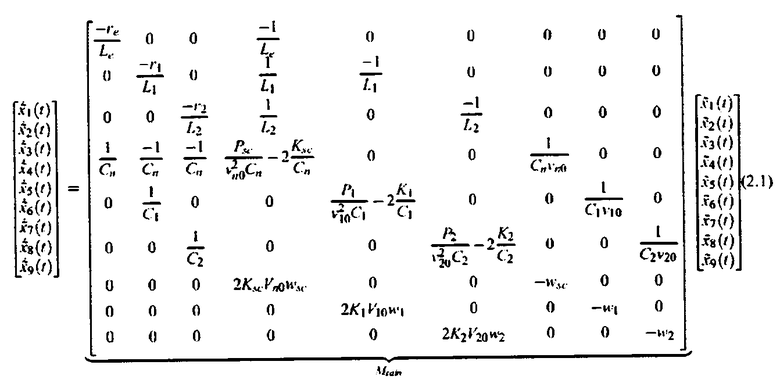
Сеть, показанную на фиг. 3, моделируют и линеаризуют в данной рабочей точке. Эта сеть соответствует сети, показанной на фиг. 1, в которую добавлены стабилизационные блоки в соответствии с изобретением, при этом каждый блок предназначен для регулирования заданного значения управления нагрузки, с которой он связан, чтобы стабилизировать ее внутри сети.
Линейную математическую модель сети постоянного тока можно описать при помощи следующей матрицы (msain), в которой параметры К1, К2 и Кsc выражают соответственно коэффициенты коррекции первой, второй и третьей нагрузок.
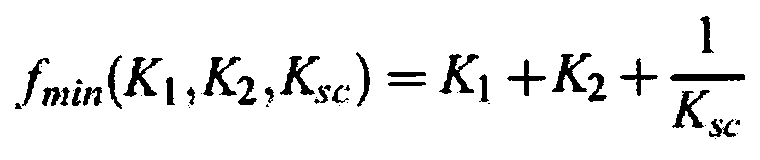
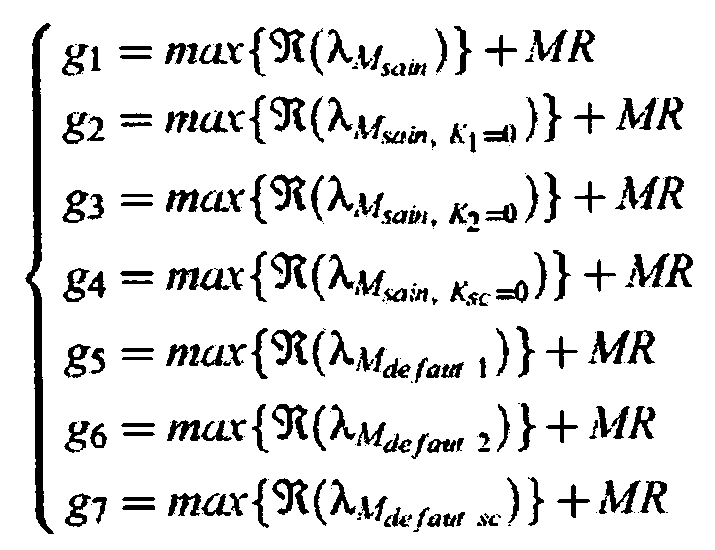
Для стабилизации сети определяют целевую функцию в зависимости от условий, которые будут подробнее описаны ниже. Эту целевую функцию можно выразить следующим уравнением:
Условия должны гарантировать стабильность системы. Им должны соответствовать реальные части собственных значений λ матриц состояния системы в различных конфигурациях. Поскольку условия действуют локально вокруг рабочей точки, стабильность всех рабочих точек, соответствующих данной области D, будет рассматриваться по двум интервалам мощности, что выражается следующим отношением:
причем для следующих случаев:
(а) по меньшей мере, два из трех стабилизаторов являются активными (возможность неисправности на одном из трех);
(b) отсоединение одной из ветвей системы (автоматическое отключение из соображений безопасности).
Таким образом, в сценариях отказа будет учитываться событие и его влияние на систему при помощи алгоритма, отвечающего за оптимизацию, который, если сойдется, даст размерность стабилизационных блоков, которая обеспечивает стабильность для всех рассматриваемых случаев. Следует напомнить, что обеспечение локальной стабильности для всех рабочих точек области не соответствует обеспечению стабильности широкого сигнала в этой области.
Другие учитываемые условия касаются случая переконфигурирования сети, например, в случае отключения на одной ветви сети.
Нижеследующая матрица Mdefaut1 является математическим моделированием сети в случае, когда ветвь первой нагрузки разомкнута, например, в точке О1 на фиг. 3.
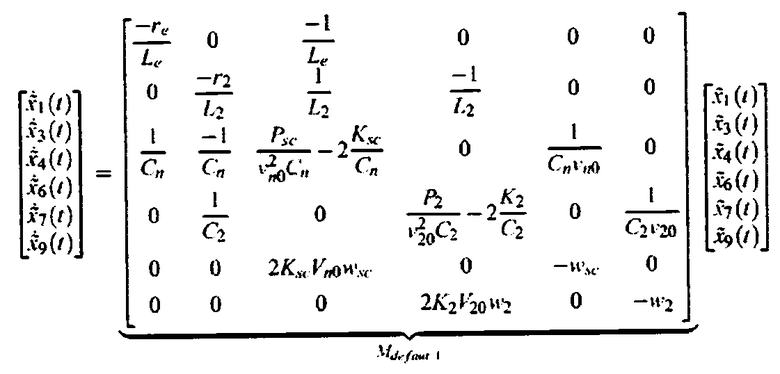
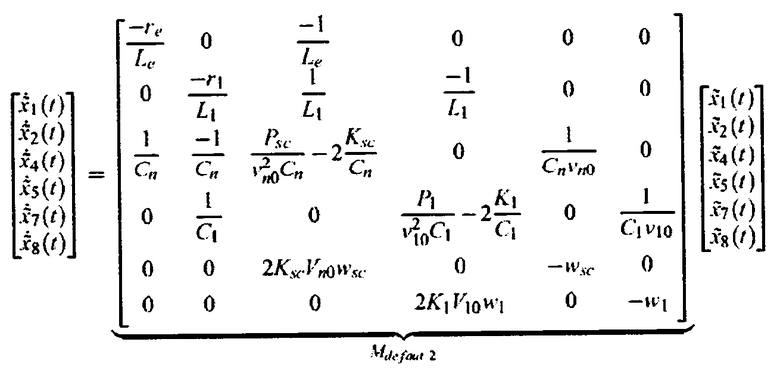
Нижеследующая матрица Mdefaut2 является математическим моделированием сети в случае, когда ветвь второй нагрузки разомкнута, например, в точке О2 на фиг. 3.
Нижеследующая матрица Mdefautsc является математическим моделированием сети в случае, когда ветвь третьей нагрузки разомкнута, например, в точке О3 на фиг. 3.
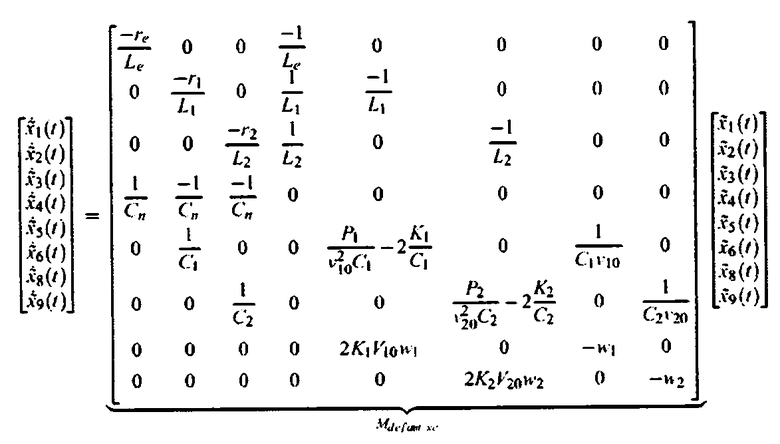
Для включения критерия робастности реальные части собственных значений матриц Msain, Mdefaut1, Mdefautsc и Mdefaut2 должны быть меньше строго отрицательного значения, обозначенного MR. Это обеспечит запас безопасности для учета возможных разбросов и неточностей в значениях параметров. В конечном итоге необходимые для соблюдения условия можно выразить отношением:
В алгоритме можно учитывать любое другое условие, выраженное в виде уравнений.
Линеаризация системы позволяет определить собственные значения за счет использования различных значений К, при этом реальные части каждого полюса становятся отрицательными (что обеспечивает стабильность в области, близкой к точкам линеаризации) и предпочтительно становятся меньше -5 для увеличения запаса робастности системы.
Затем, например, в зависимости от различных искомых рабочих точек, от различных возможных конфигураций и от критериев минимизации влияния динамических характеристик на нагрузки можно определить различные значения К, отвечающие совокупности этих критериев, для обеспечения стабильности сети.
На фиг. 5 очень схематично представлены этапы заявленного способа определения коэффициентов коррекции, которые применяют к заданным значениям нагрузок для их стабилизации внутри сети постоянного тока. Эта фигура иллюстрирует условия, которые можно учитывать при определении коэффициентов коррекции.
В представленном примере учитываемыми условиями являются:
а) допустимые интервалы для коэффициентов К стабилизационных блоков (блок 60);
b) запас робастности для стабильности каждой нагрузки (блок 62);
c) контроль переконфигурирования сети (блок 64); и
d) контроль потери одного из стабилизационных блоков (блок 66).
Установленная выше модель сети позволяет определить минимизируемую целевую функцию и оценить влияние каждой нагрузки на стабилизацию (блок 68).
Моделирование сети, ее рабочих точек и ее искомых допустимых аварийных режимов позволяет определить совокупность уравнений, обеспечивающую определение единого набора значений коэффициентов (К1-Кn). Это единое решение позволяет добиться того, что определяемые значения являются робастными и едиными для всех искомых случаев и учитываются в моделировании и в системе уравнений.
Затем применяют алгоритм оптимизации для итерации и нахождения наилучших значений К, отвечающих критериям оптимизации (блоки 70 и 72). Алгоритм вычисления не является специфическим и может быть, например, функцией fmincon MatLab, которая решает и оптимизирует все уравнения. Это позволяет определить значения вышеуказанных коэффициентов коррекции К.
Целью децентрализованной или многоблочной стабилизации является нахождение когерентной размерности стабилизационных блоков, которая обеспечивает стабильность системы во многих случаях. Для достижения этой цели используют метод обусловленной оптимизации. При таком подходе можно учитывать условия для стабильности системы. Ими являются, например, пределы робастности, допускаемые сбои на стабилизаторах, а также контроль возможных случаев переконфигурирования системы в случае отключения одной нагрузки сети. Кроме того, в качестве минимизируемой функции используют отношение, связывающее все стабилизационные блоки с их влиянием на их соответствующую нагрузку.
Выбор алгоритма оптимизации является прозрачным по отношению к проблеме. Это значит, что интерес предложенного метода состоит в определении проблемы. Затем находят решение при помощи выбираемого алгоритма обусловленной оптимизации. В данном случае используемым методом является функция fmincon MatLab, которую можно найти в “optimization toolbox”. Она основана на минимизации целевой функции, к которой добавляют условия, взвешенные при помощи коэффициентов. Коэффициенты, взвешивающие условия, приводят к тому, что минимум определенной таким образом новой функции не может соответствовать решениям, не отвечающим условиям.
Оптимизация основана на линейных моделях (Msain, Mdefaut 1, Mdefaut sc и Mdefaut 2), соответствующих разным возможным сценариям в описанном выше примере.
Сопротивления определяют посредством определения и решения задачи обусловленной оптимизации. Сопротивления представляют собой решение задачи обусловленной оптимизации. Они соответствуют коэффициентам К и Cv.
На фиг. 6 схематично представлены этапы заявленного способа оптимизации.
Сначала пользователь определяет область D, в которой будут определены коэффициенты коррекции К. Алгоритм оптимизации определяет в этой области вектор Хо, содержащий все коэффициенты коррекции нагрузок (блок 80). В представленном случае сети постоянного тока, содержащей три нагрузки, Хо=[K1, K2 и Ksc], алгоритм оптимизации сначала проверяет, чтобы для вектора Хо соблюдались все вышеуказанные условия (блок 82). Если условия не удовлетворены, алгоритм определяет новый вектор (84, 80). Если, наоборот, все условия соблюдаются, алгоритм вычисляет целевую функцию с вектором Хо (блок 86), затем сравнивает полученный результат с результатом этой функции, когда используемый вектор является наименьшим из возможных, то есть когда составляющие его коэффициенты коррекции являются наименьшими из возможных (блок 88). Если целевая функция fobj(Xo) превышает или равна fobj(Xmin) (ветви 90, 84), алгоритм вычисляет новый вектор и повторяет этапы блоков 80, 82 и 86. Если целевая функция fobj(Xo) меньше fobj(Xmin) и если Хо равен Xmin, то есть вектор является наименьшим возможным (блок 92), оптимизация завершается (ветвь 94) и идентифицированный вектор можно принять в качестве вектора оптимизации (Xo=Xmin=Xopt-блок 96), причем этот вектор оптимизации содержит оптимальные коэффициенты коррекции К1, К2 и Ksc для стабилизации всех нагрузок и сети постоянного тока.
Для применения системы многоблочной стабилизации основной этап заключается в получении значений коэффициентов К, которые будут удовлетворять фиксированным условиям. Для этого определенную выше задачу обусловленной оптимизации адаптируют к требуемой форме при помощи функции fmincon MatLab, и она включает в себя:
Х=fmincon (fmin, x0, A, b, Aeq, beq, xmin, xmax, NLcon)
fmin: целевая функция
х0: исходная точка оптимизации
А и b: условие неравенства, А·х≤b
Aeq и beq: условие равенства, Aeq·x=beq
хmin и xmax: интервалы определения х
NLcon: нелинейные условия неравенства и равенства.
Для рассматриваемой в данном случае задачи присутствуют только нелинейные условия (NLcon). Они определены в файле MatLab, где представлены собственные значения матриц Msain, Mdefau 1, Mdefautsc для рассматриваемых случаев и предложены условия, как они были определены выше в алгоритме оптимизации.
Векторы xmin и xmax определяют максимальные и минимальные значения, которые могут принимать коэффициенты К. В данном случае для всех трех коэффициентов будет зафиксировано значение виртуального сопротивления (которое соответствует 1/К) между бесконечностью (ослабления нет) и 1. Таким образом, это дает xmin=0 и xmax=1.
Берут начальную точку оптимизации х0 таким образом, чтобы первоначальное значение виртуального сопротивления каждого стабилизационного блока было равно 20, то есть х0=[0,05 0,05 0,05]t. Запас робастности (MR) принимают равным 5.
Что касается выбора коэффициентов ai, которые определяют предназначенную для минимизации целевую функцию, принимают asc с отрицательным знаком и принимают а1=а2 с положительным знаком для получения fmin в виде:
fmin(K1,K2,Ksc)=-|asc|Ksc+|a1|(K1+K2)
|asc|+2 |a1|=1.
Это способствует получению «больших» значений Кsc и, наоборот, позволяет искать наименьшие возможные значения для К1 и К2. Соотношение ropt=a1/asc позволит сбалансировать усилие оптимизации. Чем больше это соотношение, тем меньше коэффициенты для нагрузок 1 и 2.
Результаты оптимизации (в зависимости от соотношения ropt для интервалов мощности Р1 ∈ [0;700Вт] и Р2 ∈ [0;500Вт]) показали, что Кsc всегда намного превышает К1 и К2, что подтверждает выбор знака коэффициентов. После этого видно, что при ropt значение К1 почти не меняется. Это связано с условием, задаваемым случаем, когда стабилизатор нагрузки 2 не работает. В этом случае только нагрузка 1 и суперконденсатор SC обеспечивают стабильность шины. Однако, как было указано выше, учитывая структуру сети, стабилизатор суперконденсатора SC оказывает лишь ограниченное влияние на смещение некоторых собственных значений. В этом случае нагрузка 1 должна обеспечивать основную часть стабилизации, что фиксирует значение коэффициента К1. Что касается других коэффициентов, они уменьшаются по мере уменьшения значения ropt. При ropt<0,06 алгоритм перестает сходиться.
В представленном выше частном примере выполнения изобретения на основании вышеуказанных уравнений выбирают коэффициенты, которые завершают определение размерности системы многоблочной стабилизации:
Ksc=0,084
K1=0,008
K2=0,0535.
Эффективность стабилизации сети постоянного тока проверяют посредством моделирования и экспериментальным путем. Для этого можно разработать модель Simulink сети. Экспериментальным путем получают кривые, показанные на фиг. 7-9.
На фиг. 7 представлен график, показывающий изменение напряжения шины постоянного тока (v1, v2 и vn) на трех нагрузках сети, показанной на фиг. 1, в ответ на ступенчатое изменение мощности, когда три нагрузки не стабилизированы. Отмечается, что в результате ступенчатого изменения мощности колебания сигналов не стабилизируются. Наоборот, их амплитуды увеличиваются. При рассмотрении собственных значений переходной функции vn/Ve каждой нагрузки отмечается, что, по меньшей мере, часть нулей знаменателя этой переходной функции имеют реальную положительную часть, что свидетельствует о нестабильности системы.
На фиг. 8 представлен график, показывающий изменение напряжения шины постоянного тока (v1, v2 и vn) на трех нагрузках сети, показанной на фиг. 1, в ответ на ступенчатое изменение мощности, когда эти три нагрузки стабилизированы при помощи заявленного способа. В отличие от предыдущей фигуры колебания сигналов стабилизируются и их амплитуды со временем уменьшаются в ответ на ступенчатое изменение мощности. Таким образом, сеть постоянного тока стабилизирована.
При рассмотрении собственных значений переходной функции vn/Ve каждой нагрузки отмечается, что все нули знаменателя этой переходной функции имеют реальную отрицательную часть, что свидетельствует о стабильности системы, когда все три ветви работают одновременно.
На фиг. 9 представлен график, соответствующий фиг. 8, при котором стабилизационный блок нагрузки SC отключен и, следовательно, не обеспечивает ее стабилизацию. Вместе с тем отмечается, что колебания сигналов стабилизируются и их амплитуды со временем уменьшаются в ответ на ступенчатое изменение мощности. Таким образом, сеть постоянного тока остается стабилизированной несмотря на деактивацию стабилизационного блока.
Эти результаты подтверждают стабилизирующее влияние предложенного метода. При этом видно, что всего лишь за счет определения размерности различных стабилизационных блоков системы можно обеспечивать стабильность сети в случае отключения одного из блоков или в случае переконфигурирования сети. Это подтверждается также тем, что сценарии, которые не были включены в условия стабилизации, являются нестабильными. При этом многоблочная система не может обеспечивать стабильность системы, если при оптимизации не были учтены условия, связанные с соответствующим сценарием.
Динамика, отмечаемая по результатам моделирования, присутствует также при экспериментальных испытаниях. Отмечается, что наиболее экстремальный сценарий (когда ответ системы является наименее демпфированным) происходит, когда стабилизатор 1 выходит из строя. Наименее сложный сценарий наступает, когда не работает стабилизатор суперконденсатора SC.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНТАКТНЫЕ ЛИНЗЫ СО СТАБИЛИЗАЦИОННЫМИ СВОЙСТВАМИ | 2010 |
|
RU2563554C2 |
| СПОСОБ ПИТАНИЯ НАГРУЗКИ ПОСТОЯННЫМ ТОКОМ В АВТОНОМНОЙ СИСТЕМЕ ЭЛЕКТРОПИТАНИЯ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 2008 |
|
RU2392718C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ПЕРЕМЕННОГО НАПРЯЖЕНИЯ | 1990 |
|
RU2016484C1 |
| УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ ПАРАМЕТРОВ ЭЛЕКТРИЧЕСКОЙ СЕТИ | 2017 |
|
RU2661339C2 |
| УСТРОЙСТВО И СПОСОБ ОСВЕЩЕНИЯ НА ОСНОВЕ СИД С ВЫСОКИМ КОЭФФИЦИЕНТОМ МОЩНОСТИ | 2008 |
|
RU2479955C2 |
| Стабилизатор переменного напряжения | 1983 |
|
SU1104484A1 |
| СПОСОБ ПОВЫШЕНИЯ КАЧЕСТВА ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 2011 |
|
RU2475914C1 |
| СПОСОБ УПРАВЛЕНИЯ ДЛЯ ЧЕТЫРЕХ СТАТИЧЕСКИХ СТАБИЛИЗИРОВАННЫХ ИСТОЧНИКОВ НАПРЯЖЕНИЯ ПОСТОЯННОГО ТОКА, РАБОТАЮЩИХ ПАРАЛЛЕЛЬНО НА ОБЩУЮ НАГРУЗКУ | 2008 |
|
RU2362249C1 |
| ИСТОЧНИК ВТОРИЧНОГО ЭЛЕКТРОПИТАНИЯ С КОМПЕНСАЦИЕЙ ИСКАЖЕНИЙ В ПИТАЮЩЕЙ СЕТИ | 2005 |
|
RU2292627C1 |
| СПОСОБ УПРАВЛЕНИЯ СТАТИЧЕСКИМИ СТАБИЛИЗИРОВАННЫМИ ИСТОЧНИКАМИ НАПРЯЖЕНИЯ ПОСТОЯННОГО ТОКА, РАБОТАЮЩИМИ ПАРАЛЛЕЛЬНО НА ОБЩУЮ НАГРУЗКУ | 2008 |
|
RU2353042C1 |
Использование - в области электротехники. Технический результат - повышение эффективности активной стабилизации сети или подсети постоянного тока. Технический результат обеспечивается тем, что сеть, содержащую источник (11) постоянного напряжения, питающий электрические нагрузки (12, 18, 24), подключенные параллельно к клеммам источника (11) напряжения и предназначенные для получения заданного значения тока или мощности, стабилизируют посредством регулирования заданных значений, применяемых к нагрузкам (12, 18, 24), при помощи виртуального стабилизационного сопротивления, создаваемого на клеммах каждой нагрузки (12, 18, 24). Причем эти виртуальные сопротивления рассчитывают таким образом, чтобы стабилизировать сеть в различных необходимых рабочих точках и в различных данных конфигурациях сети, включая состояние, в котором по меньшей мере одна нагрузка является неактивной или неисправна, и состояние, в котором стабилизация нагрузки является неактивной, при этом каждое виртуальное сопротивление создают при помощи контура нелинейного регулирования, который действует на заданное значение соответствующей нагрузки. 3 н. и 5 з.п. ф-лы, 10 ил.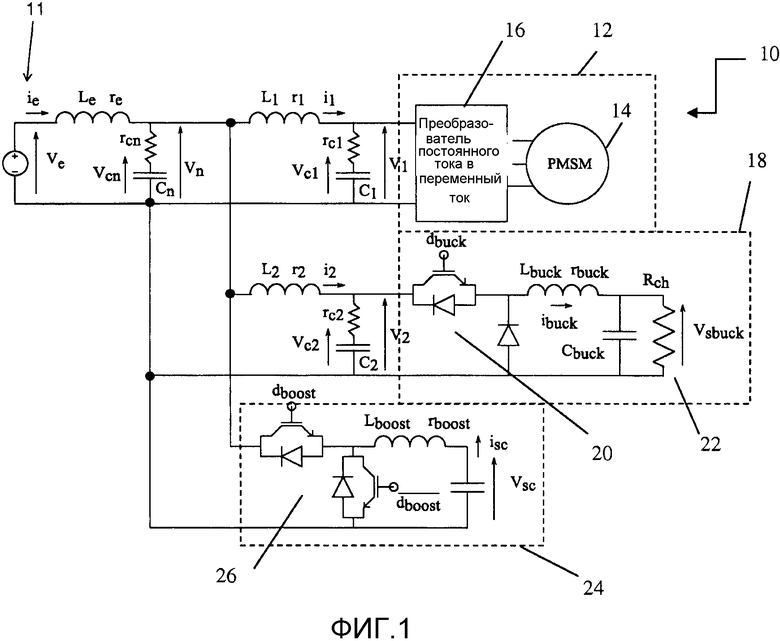
1. Способ стабилизации электрической сети (10) постоянного тока, при этом сеть содержит источник (11) постоянного напряжения, питающий электрические нагрузки (12, 18, 24), которые подключены параллельно к клеммам источника напряжения и каждая из которых предназначена для получения заданного значения тока или мощности, отличающийся тем, что сеть стабилизируют посредством регулирования заданных значений, применяемых к нагрузкам, при помощи виртуального стабилизационного сопротивления, создаваемого на клеммах каждой нагрузки, причем параметры этих виртуальных сопротивлений рассчитывают таким образом, чтобы стабилизировать сеть в различных необходимых рабочих точках и в различных данных конфигурациях сети, включая состояние, в котором, по меньшей мере, одна нагрузка является неактивной или неисправна, и состояние, в котором стабилизация нагрузки является неактивной, при этом каждое виртуальное сопротивление создают при помощи стабилизационного блока контура нелинейного регулирования, который действует на заданное значение соответствующей нагрузки и который выполнен с возможностью генерирования стабилизационного сигнала pv(t), предназначенного для наложения на заданное значение нагрузки для повышения порога этого заданного значения, сверх которого сеть является нестабильной, при этом стабилизационным сигналом является
pv(t)=vs(t)·Cv·dvs/dt или
pv(t)=K·vs 2-X3
где vs обозначает напряжение на клеммах нагрузки, Cv и K являются параметрами, определяющими стабилизационное виртуальное сопротивление, и Х3 является выходным сигналом фильтра граничной частоты wc, который принимает на входе сигнал K·vs 2, при этом чем больше параметр Cv или K, тем больше стабилизационный сигнал, что повышает порог заданного значения нагрузки и обеспечивает стабильность сети.
2. Способ по п. 1, отличающийся тем, что каждый контур регулирования использует нелинейное правило регулирования, согласно которому генерируют выходной сигнал типа K·f(x), где x является переменной управления нагрузкой и К является коэффициентом коррекции именно для этой нагрузки, при этом коэффициенты коррекции (K1, K2, …, Kn) определяют посредством осуществления этапов, на которых:
а) определяют математическую модель электрической сети, при этом модель включает в себя уравнения, содержащие вышеуказанные коэффициенты коррекции (K1, K2, …, Kn) для обеспечения стабильности нагрузок и сети;
b) определяют условия, соблюдаемые таким образом, чтобы сеть оставалась стабильной, в частности, во время переконфигурирования сети или отключения, по меньшей мере, одной нагрузки; и
с) определяют оптимальный вектор (Хо) коэффициентов коррекции при помощи алгоритма оптимизации, предназначенного для проверки соблюдения вышеуказанных условий для данного вектора, и вычисления целевой функции стабилизации с этим вектором, затем эти этапы повторяют, пока вектор с наименьшими возможными коэффициентами коррекции не будет удовлетворять критериям.
3. Способ по п. 2, отличающийся тем, что соблюдаемые условия включают в себя интервалы допустимых значений для коэффициентов коррекции и поддержание стабилизации в случае переконфигурирования сети, сбоя стабилизации, по меньшей мере, одной нагрузки и в случае колебаний или неточностей в значениях параметров самой сети.
4. Способ по п. 2, отличающийся тем, что математическая модель включает в себя уравнения, характеризующие сеть в отсутствие одной или нескольких нагрузок и/или в отсутствие стабилизации одной или нескольких нагрузок.
5. Способ по п. 2, отличающийся тем, что алгоритм оптимизации предназначен для сравнения вычисления целевой функции с одним вектором с вычислением этой функции с другим вектором, в котором коэффициенты коррекции являются наименьшими возможными, затем эти этапы повторяют, пока рассматриваемый вектор не станет идентичным вектору с наименьшими возможными коэффициентами.
6. Электрическая сеть (10) типа сети постоянного тока, содержащая источник (11) постоянного напряжения, питающий электрические нагрузки (12, 18, 24), которые подключены параллельно к клеммам источника напряжения и каждая из которых предназначена для получения заданного значения тока или мощности, отличающаяся тем, что сеть стабилизирована посредством регулирования заданных значений, применяемых к нагрузкам при помощи стабилизационных блоков (28), включенных в контуры нелинейного регулирования, при этом каждый стабилизационный блок предназначен для генерирования виртуального стабилизационного сопротивления для нагрузки и имеет вход, соединенный со средствами измерения напряжения на клеммах соответствующей нагрузки, и выход, соединенный с клеммой приложения заданного значения нагрузки сумматором (36), соединенным также со средствами передачи заданного значения.
7. Сеть по п. 6, отличающаяся тем, что стабилизационный блок (28) содержит фильтр (32) нижних частот и схему вычитания (34), при этом вход фильтра соединен с вышеуказанными средствами измерения, а его выход соединен со схемой вычитания, которая предназначена для вычитания выходного сигнала фильтра из сигнала, поступающего от средств измерения.
8. Транспортное средство, такое как летательный аппарат, отличающееся тем, что содержит электрическую сеть (10) по п. 6 или 7.
| US 2009267588 A1, 29.10.2009 | |||
| Способ обжига ячеистой керамики в капсюлях | 1949 |
|
SU87302A1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ НАПРЯЖЕНИЯ ПОСТОЯННОГО ТОКА | 2010 |
|
RU2444832C2 |

