ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Настоящая заявка испрашивает приоритет по Предварительной заявке на выдачу патента США №61/643166, поданной 4 мая 2012 года, полное содержание которой включено в материалы настоящей заявки путем ссылки для любых целей.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к способам регулирования работы транспортного средства, в том числе, регулирования работы муфты расцепления, расположенной в приводе на ведущие колеса транспортного средства на основании обнаружения устройства управления дорожным движением.
УРОВЕНЬ ТЕХНИКИ
Устройства управления дорожным движением, такие как знаки остановки и светофоры, используются для регулирования, предупреждения или направления движения автомобильного транспорта. Однако проблемы возникают, когда водители транспортного средства перестают следовать устройствам управления дорожным движением, умышленно или не умышленно. В качестве одного из примеров, когда водители транспортных средств перестают останавливаться на знаках остановки или прибавляют скорость, когда светофор красный или собирается загореться красным, в результате могут происходить аварии и несчастные случаи, а также возникают затраты, связанные с ремонтом повреждений и счетами за лечение для пострадавших сторон. В качестве еще одного примера, водители транспортных средств могут прибавлять скорость по мере того, как они приближаются к перекрестку, а затем, резко нажимать на тормоз, когда они замечают знак остановки, или резко нажимать на тормоз, когда светофор переключается с зеленого на желтый и на красный до того, как они достигли перекрестка. Резкое торможение таким образом может тратить впустую топливо и вызывать ненужный износ и амортизацию компонентов транспортного средства. Соответственно, небрежность водителей транспортных средств в следовании устройствам управления дорожным движением может приводить к угрозам безопасности, а также неэффективному использованию топлива.
Известны различные подходы для снижения угроз безопасности и не эффективностей использования топлива, связанные с устройствами управления дорожным движением. В одном из подходов, в US 2010/0070128 описано снабжение автомобилистов информацией касательно перекрестков на их маршруте движения, таким образом, давая им возможность управлять своими транспортными средствами некоторым образом, который повышает экономию топлива и/или безопасность дорожного движения. Например, вычислительное устройство принимает связанные с дорожным движением данные с множества датчиков в местоположениях дорожной сигнализации, анализирует данные и беспроводным образом передает релевантные данные на установленную на транспортном средстве технику, которая может автоматически регулировать рабочие параметры транспортного средства или уведомлять водителя, что следует регулировать рабочие параметры вручную. Эти связанные с дорожным движением данные могут включать в себя состояние сигнализации светофора, например, указание, когда светофор загорится зеленым. Однако, в этом подходе, связанные с дорожным движением данные не включают в себя данные о статических устройствах управления дорожным движением, таких как знаки остановки.
Авторы в материалах настоящего документа выявили, что может быть полезным разработать разные стратегии управления транспортным средством, соответствующие разным устройствам управления дорожным движением. То есть, авторы в материалах настоящего документа выявили, что тип устройства управления дорожным движением (например, знак остановки или светофор) может быть определен при приближении транспортного средства к перекрестку, и может приниматься стратегия управления, специально приспособленная для содействия эффективности использования топлива и безопасности для известного поведения транспортного средства при приближении к такому типу устройства управления дорожным движением (например, обязательной остановки на знаке остановки и условной остановки на светофоре в зависимости от его состояния).
Авторы в материалах настоящего документа дополнительно выявили, что в транспортных средствах с гибридным приводом может быть полезным, чтобы стратегия управления транспортным средством включала в себя регулирование работы муфты расцепления на основании типа устройства управления дорожным движением, обнаруженного на приближающемся перекрестке.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
В одном из примерных подходов предложен способ эксплуатации транспортного средства, включающий в себя этап, на котором:
регулируют работу транспортного средства в ответ на то, является ли обнаруженное устройство управления дорожным движением знаком остановки или светофором.
В одном из вариантов предложен способ, дополнительно включающий в себя этапы, на которых, если обнаруженное устройство управления дорожным движением является знаком остановки:
оценивают текущее состояние транспортного средства, основанное на расстоянии между транспортным средством и перекрестком, связанным со знаком остановки, расстоянии между транспортным средством и впереди идущим транспортным средством, скорости транспортного средства и темпе замедления транспортного средства; и
определяют стратегию управления транспортным средством на основании текущего состояния транспортного средства.
В одном из вариантов предложен способ, в котором стратегию управления выполняют автоматически, либо рекомендуют водителю транспортного средства предпринять действия на основании стратегии управления.
В одном из вариантов предложен способ, в котором стратегия управления содержит отключение двигателя транспортного средства на максимально возможную длительность при приближении транспортного средства к перекрестку, и пока транспортное средство остановлено на перекрестке.
В одном из вариантов предложен способ, в котором стратегия управления содержит минимизацию отбора энергии при приближении транспортного средства к перекрестку, и пока транспортное средство остановлено на перекрестке.
В одном из вариантов предложен способ, дополнительно включающий в себя этапы, на которых, если обнаруженное устройство управления дорожным движением является светофором:
оценивают текущее состояние транспортного средства, основанное на расстоянии между транспортным средством и перекрестком, связанным со светофором, расстоянии между транспортным средством и впереди идущим транспортным средством, скорости транспортного средства и темпе замедления транспортного средства;
определяют текущее состояние светофора;
прогнозируют временные характеристики изменения состояния светофора; и
определяют стратегию управления транспортным средством на основании текущего состояния транспортного средства, текущего состояния светофора и прогнозируемых временных характеристик изменения состояния светофора.
В одном из вариантов предложен способ, в котором стратегию управления выполняют автоматически, либо рекомендуют водителю транспортного средства предпринять действия на основании стратегии управления.
В одном из вариантов предложен способ, в котором стратегия управления содержит вычисление скорости, на которой транспортное средство достигнет светофора, когда состояние светофора является зеленым, и управление транспортным средством для передвижения на такой скорости.
В одном из вариантов предложен способ эксплуатации транспортного средства, включающий в себя этапы, на которых:
обнаруживают устройство управления дорожным движением на перекрестке, к которому приближается транспортное средство; и
размыкают и смыкают муфту расцепления, расположенную в приводе на ведущие колеса транспортного средства между двигателем и стартером/генератором на основании типа обнаруженного устройства управления дорожным движением.
В одном из вариантов предложен способ, в котором размыкание муфты расцепления включает в себя этап, на котором отсоединяют двигатель от привода на ведущие колеса, и при этом смыкание муфты расцепления включает в себя этап, на котором присоединяют двигатель к приводу на ведущие колеса.
В одном из вариантов предложен способ, дополнительно включающий в себя этапы, на которых, если обнаруженное устройство управления дорожным движением является знаком остановки:
оценивают текущее состояние транспортного средства, основанное на расстоянии между транспортным средством и перекрестком, расстоянии между транспортным средством и впереди идущим транспортным средством, скорости транспортного средства и темпе замедления транспортного средства;
определяют требуемое время для размыкания муфты расцепления на основании текущего состояния транспортного средства; и
размыкают муфту расцепления в требуемый момент времени.
В одном из вариантов предложен способ, дополнительно включающий в себя этапы, на которых:
после размыкания муфты расцепления:
преобразуют крутящий момент с колес транспортного средства в электрическую энергию посредством стартера/генератора;
накапливают электрическую энергию в устройстве накопления электрической энергии; и
смыкают муфту расцепления для присоединения двигателя к приводу на ведущие колеса после того, как транспортное средство остановлено на перекрестке на требуемую длительность.
В одном из вариантов предложен способ, дополнительно включающий в себя этапы, на которых, если обнаруженное устройство управления дорожным движением является светофором:
оценивают текущее состояние транспортного средства, основанное на расстоянии между транспортным средством и перекрестком, расстоянии между транспортным средством и впереди идущим транспортным средством, скорости транспортного средства и темпе замедления транспортного средства;
определяют текущее состояние светофора;
прогнозируют временные характеристики изменения состояния светофора;
определяют, достигнута ли посредством остановки на перекрестке требуемая производительность транспортного средства, на основании текущего состояния транспортного средства, текущего состояния светофора и прогнозируемых временных характеристик изменения состояния светофора; и
приводят в действие муфту расцепления на основании того, достигнута ли посредством остановки на перекрестке требуемая производительность транспортного средства.
В одном из вариантов предложен способ, в котором приведение в действие муфты расцепления на основании того, достигнута ли посредством остановки на перекрестке требуемая производительность транспортного средства, включает в себя этапы, на которых:
если посредством остановки на перекрестке достигнута требуемая производительность транспортного средства, определяют момент времени для размыкания муфты расцепления, чтобы останавливать транспортное средство на перекрестке, и размыкают муфту расцепления в такой момент времени; и
если посредством остановки на перекрестке не достигнута требуемая производительность транспортного средства,
вычисляют скорость, с которой транспортное средство прибудет на перекресток, когда состояние светофора является зеленым; и
осуществляют передвижение на вычисленной скорости.
В одном из вариантов предложен способ, дополнительно включающий в себя этап, на котором определяют, может ли быть достигнута вычисленная скорость, если муфта расцепления разомкнута в течение по меньшей мере минимальной длительности, и если так, размыкают муфту расцепления на по меньшей мере минимальную длительность.
В одном из вариантов предложен способ, дополнительно включающий в себя этап, на котором:
при разомкнутой муфте расцепления:
преобразуют крутящий момент с колес транспортного средства в электрическую энергию посредством стартера/генератора; и
накапливают электрическую энергию в устройстве накопления электрической энергии.
В одном из вариантов предложен способ эксплуатации транспортного средства, включающий в себя этапы, на которых:
обнаруживают устройство управления дорожным движением на перекрестке, к которому приближается транспортное средство;
получают данные транспортного средства;
оценивают состояние транспортного средства на основании данных транспортного средства;
определяют стратегию управления для транспортного средства, причем определение основано на по меньшей мере том, является ли устройство управления дорожным движением знаком остановки или светофором; и
вводят в действие стратегию управления.
В одном из вариантов предложен способ, в котором определение стратегии управления дополнительно основано на выборе автоматического режима или режима рекомендации водителю водителем транспортного средства и выборе одного или более из режима безопасности и режима эффективности использования топлива водителем транспортного средства.
В одном из вариантов предложен способ, в котором ввод в действие стратегии управления включает в себя этапы, на которых размыкают и смыкают муфту расцепления, расположенную в приводе на ведущие колеса транспортного средства между двигателем и стартером/генератором, при этом размыкание муфты расцепления включает в себя этап, на котором отсоединяют двигатель от привода на ведущие колеса, и при этом смыкание муфты расцепления включает в себя этап, на котором присоединяют двигатель к приводу на ведущие колеса.
В одном из вариантов предложен способ, в котором ввод в действие стратегии управления дополнительно включает в себя этапы, на которых:
если устройство управления дорожным движением является знаком остановки, вычисляют максимально возможную длительность для отключения двигателя на основании состояния транспортного средства;
если устройство управления дорожным движением является светофором, вычисляют максимально возможную длительность для отключения двигателя на основании состояния транспортного средства и состояния светофора; и
размыкают муфту расцепления и отключают двигатель на максимально возможную длительность.
Следует понимать, что раскрытие изобретения, приведенное выше, предоставлено для ознакомления с упрощенной формой подборки концепций, которые дополнительно описаны в подробном описании изобретения. Не предполагается идентифицировать ключевые или существенные признаки заявленного предмета изобретения, объем которого однозначно определен формулой изобретения, которая сопровождает подробное описание. Более того, заявленный предмет изобретения не ограничен вариантами осуществления, которые решают какие-либо недостатки, отмеченные выше или в любой части этого описания.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 показывает схематичное изображение двигателя;
фиг.2 показывает примерную конфигурацию привода на ведущие колеса транспортного средства;
фиг.3 показывает примерный способ регулирования работы транспортного средства на основании типа обнаруженного устройства управления дорожным движением;
фиг.4 показывает примерный способ управления транспортным средством, когда обнаружен знак остановки, который должен использоваться вместе со способом по фиг.3;
фиг.5 показывает примерный способ управления транспортным средством, когда обнаружен светофор, который должен использоваться вместе со способом по фиг.3;
фиг.6 показывает примерный способ регулирования работы транспортного средства, в том числе регулирования работы муфты расцепления транспортного средства, на основании типа обнаруженного устройства управления дорожным движением;
фиг.7 показывает примерный способ эксплуатации транспортного средства, в том числе, регулирования работы муфты расцепления транспортного средства, когда обнаружен знак остановки, который должен использоваться вместе со способом по фиг.6;
фиг.8 показывает примерный способ эксплуатации транспортного средства, в том числе, регулирования работы муфты расцепления транспортного средства, когда обнаружен светофор, который должен использоваться вместе со способом по фиг.6; и
фиг.9 показывает еще один примерный способ регулирования работы транспортного средства, в том числе регулирования работы муфты расцепления транспортного средства на основании типа обнаруженного устройства управления дорожным движением.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Последующее описание относится к способам регулирования работы транспортного средства, в том числе, регулирования работы муфты расцепления, расположенной в приводе на ведущие колеса транспортного средства в некоторых примерах, на основании обнаружения устройства управления дорожным движением. Более точно, работа транспортного средства регулируется разным образом в зависимости от типа обнаруженного устройства управления дорожным движением. Несмотря на то, что знаки остановки и светофоры, в частности, описаны в материалах настоящего документа, следует понимать, что раскрытые способы могут быть модифицированы для применения к другим типам устройств управления дорожным движением, например, знакам второстепенной дороги, не выходя из объема настоящего раскрытия.
В некоторых примерах, транспортное средство может быть транспортным средством с гибридным приводом. Один из примеров транспортного средства с гибридным приводом включает в себя транспортное средство с двигателем, который может избирательно присоединяться к электрической машине и трансмиссии согласно условиям эксплуатации транспортного средства, как показано на фиг.1-2. Двигатель может избирательно присоединяться к электрической машине и трансмиссии через муфту расцепления с электрическим или гидравлическим приводом. Муфта расцепления предоставляет электрической машине возможность выдавать крутящий момент на колеса транспортного средства во время условий низкого потребления крутящего момента без необходимости приводить в действие двигатель и без необходимости подавать крутящий момент для вращения двигателя, когда он не является сжигающим топливно-воздушную смесь. Муфта расцепления также может использоваться для перезапуска двигателя из состояния отсутствия вращения посредством электрической машины. Следует понимать, что, несмотря на то, что настоящее описание раскрывает работу муфты расцепления в контексте управления работой транспортного средства при подъезде к перекрестку, регулируемому устройством управления дорожным движением, такая работа составляет только один из многих примеров работы муфты расцепления в приводе на ведущие колеса транспортного средства с гибридным приводом.
В вариантах осуществления, описанных в материалах настоящего документа, двигатель может эксплуатироваться с или без встроенного в привод на ведущие колеса стартера/генератора (DISG) во время работы транспортного средства. Встроенный в привод на ведущие колеса стартер/генератор встроен в привод на ведущие колеса и вращается всякий раз, когда вращается насосное колесо гидротрансформатора.
Как описано в материалах настоящего документа, двигатель может выключаться, до нулевой скорости вращения (а муфта расцепления размыкаться), чтобы снижать расход топлива, когда водитель отпускает педаль акселератора. Соответственно, двигатель выключается, когда транспортное средство останавливается, или, в другие моменты времени, когда крутящий момент от электродвигателя достаточен, чтобы разгонять транспортное средство или преодолевать дорожную нагрузку. Двигатель также может выключаться после того, как транспортное средство останавливается. Выбор операции выключения двигателя и операции перезапуска двигателя, в том числе, состояния, в котором двигатель выключается/перезапускается, и выключается он или перезапускается, основан на различных параметрах, в том числе, величинах нажатия акселератора и тормозной педали водителем транспортного средства, скорости транспортного средства, температуре окружающей среды, температуре двигателя, состоянии заряда аккумуляторной батареи и т.д. Например, когда водитель нажимает педаль акселератора, и требуемый крутящий момент превышает тот, который может выдавать электродвигатель, двигатель перезапускается, чтобы дополнять крутящий момент на выходном валу электродвигателя. В дополнение, двигатель может перезапускаться во время состояния движения накатом, если состояние заряда аккумуляторной батареи падает ниже минимального порогового значения, при котором двигатель перезапускается и выдает крутящий момент, чтобы эксплуатировать электродвигатель в качестве генератора для подзарядки аккумуляторной батареи. Во время процесса перезапуска двигателя, муфта расцепления или отдельный стартерный электродвигатель могут использоваться для проворачивания коленчатого вала двигателя в зависимости от условий эксплуатации, как описано в материалах настоящего документа. Как только начинается сгорание, либо двигатель разгоняется, чтобы соответствовать входной скорости вращения электродвигателя, либо управляется зацепление/проскальзывание муфты расцепления посредством давления муфты, чтобы осаживать двигатель до входной скорости вращения электродвигателя.
Со ссылкой на фиг.1, двигатель 10 внутреннего сгорания, содержащий множество цилиндров, один цилиндр которого показан на фиг.1, управляется электронным контроллером 12 двигателя. Двигатель 10 включает в себя камеру 30 сгорания и стенки 32 цилиндра с поршнем 36, расположенным в них и присоединенным к коленчатому валу 40. Маховик 97 и зубчатый венец 99 присоединены к коленчатому валу 40. Стартер 96 включает в себя ведущий вал 98 зубчатой передачи и ведущую шестерню 95. Ведущий вал 98 зубчатой передачи может избирательно выдвигать ведущую шестерню 95 для зацепления с зубчатым венцом 99. Стартер 96 может быть установлен непосредственно спереди двигателя или сзади двигателя. В некоторых примерах, стартер 96 может избирательно подавать крутящий момент на коленчатый вал 40 через ремень или цепь. Камера 30 сгорания показана в сообщении с впускным коллектором 44 и выпускным коллектором 48 через соответственный впускной клапан 52 и выпускной клапан 54. Каждый впускной клапан и выпускной клапан может приводиться в действие кулачком 51 впускного клапана и кулачком 53 выпускного клапана. Положение кулачка 51 впускного клапана может определяться датчиком 55 кулачка впускного клапана. Положение кулачка 53 выпускного клапана может определяться датчиком 57 кулачка выпускного клапана.
Топливная форсунка 66 показана расположенной для впрыска топлива непосредственно в цилиндр 30, что известно специалистам в данной области техники как непосредственный впрыск. В качестве альтернативы, топливо может впрыскиваться во впускной канал, что известно специалистам в данной области техники в качестве впрыска во впускной канал. Топливная форсунка 66 выдает жидкое топливо пропорционально длительности импульса сигнала FPW из контроллера 12. Топливо подается на топливную форсунку 66 топливной системой (не показана), включающей в себя топливный бак, топливный насос и направляющую-распределитель для топлива (не показаны). Топливная форсунка 66 питается рабочим током из формирователя 68, который реагирует на действие контроллера 12. В дополнение, впускной коллектор 44 показан в сообщении с необязательным электронным дросселем 62, который регулирует положение дроссельной заслонки 64 для регулирования потока воздуха из воздухозаборника 42 во впускной коллектор 44. В одном из примеров, может использоваться система непосредственного впрыска низкого давления, в которой давление топлива может подниматься до приблизительно 20-30 бар. В качестве альтернативы, двухкаскадная топливная система высокого давления может использоваться для формирования более высоких давлений топлива. В некоторых вариантах осуществления, дроссель 62 и дроссельная заслонка 64 могут быть расположены между впускным клапаном 52 и впускным коллектором 44, так что дроссель 62 является дросселем отверстия.
Система 88 зажигания без распределителя выдает искру зажигания в камеру 30 сгорания через свечу 92 зажигания в ответ на действие контроллера 12. Универсальный датчик 126 кислорода выхлопных газов (UEGO) показан присоединенным к выпускному коллектору 48 выше по потоку от каталитического нейтрализатора 70 отработавших газов. В качестве альтернативы, двухрежимный датчик кислорода отработавших газов может использоваться вместо датчика 126 UEGO.
Нейтрализатор 70, в одном из примеров, включает в себя многочисленные брикеты катализатора. В еще одном примере, могут использоваться многочисленные устройства снижения токсичности выбросов, каждое с многочисленными брикетами. Нейтрализатор 70, в одном из примеров, может быть катализатором трехкомпонентного типа.
Контроллер 12 показан на фиг.1 в качестве традиционного микрокомпьютера, включающего в себя: микропроцессорный блок 102, порты 104 ввода/вывода, постоянное запоминающее устройство 106, оперативное запоминающее устройство 108, энергонезависимую память 110 и традиционную шину данных. Контроллер 12 показан принимающим различные сигналы с датчиков, присоединенных к двигателю 10, в дополнение к тем сигналам, которые обсуждены ранее, в том числе: температуру хладагента двигателя (ECT) с датчика 112 температуры, присоединенного к патрубку 114 охлаждения; датчика 134 положения, присоединенного к педали 130 акселератора для считывания силы, приложенной ступней 132; измерение давления во впускном коллекторе двигателя (MAP) с датчика 122 давления, присоединенного к впускному коллектору 44; датчика положения двигателя с датчика 118 на эффекте Холла, считывающего положение коленчатого вала 40; измерение массы воздуха, поступающего в двигатель, с датчика 120 и измерение положения дросселя с датчика 58. Барометрическое давление также может считываться (датчик не показан) для обработки контроллером 12. В предпочтительном аспекте настоящего описания, датчик 118 положения двигателя вырабатывает предопределенное количество равномерно разнесенных импульсов для каждого оборота коленчатого вала, по которому может определяться скорость вращения двигателя (RPM, в оборотах в минуту).
В некоторых примерах, двигатель может быть присоединен к системе электродвигателя/аккумуляторной батареи в транспортном средстве с гибридным приводом, как показано на фиг.2. Кроме того, в некоторых примерах, могут применяться другие конфигурации двигателя, например, дизельный двигатель.
Во время работы, каждый цилиндр в двигателе 10 типично подвергается четырехтактному циклу: цикл включает в себя такт впуска, такт сжатия, такт расширения и такт выпуска. В течение такта впуска, обычно, выпускной клапан 54 закрывается, а впускной клапан 52 открывается. Воздух вовлекается в камеру 30 сгорания через впускной коллектор 44, поршень 36 перемещается к дну цилиндра, с тем чтобы увеличивать объем внутри камеры 30 сгорания. Положение, в котором поршень 36 находится около дна цилиндра и в конце своего хода (например, когда камера 30 сгорания находится при своем наибольшем объеме), типично указывается специалистами в данной области техники ссылкой как нижняя мертвая точка (НМТ, BDC). Во время такта сжатия, впускной клапан 52 и выпускной клапан 54 закрыты. Поршень 36 перемещается к головке блока цилиндров, с тем чтобы сжимать воздух внутри камеры 30 сгорания. Точка, в которой поршень 36 находится в конце своего хода и самой близкой к головке блока цилиндров (например, когда камера 30 сгорания находится при своем наименьшем объеме), типично указывается специалистами в данной области техники в качестве верхней мертвой точки (ВМТ, TDC). В процессе, в дальнейшем указываемом ссылкой как впрыск, топливо вводится в камеру сгорания. В процессе, в дальнейшем указываемом ссылкой как воспламенение, впрыснутое топливо воспламеняется устройством зажигания, таким как свеча 92 зажигания, приводя к сгоранию. Во время такта расширения, расширяющиеся газы толкают поршень 36 обратно в НМТ. Коленчатый вал 40 преобразует перемещение поршня в крутящий момент вращающегося вала. В заключение, во время такта выпуска, выпускной клапан 54 открывается, чтобы выпускать подвергнутую сгоранию топливно-воздушную смесь в выпускной коллектор 48, и поршень возвращается в ВМТ. Отметим, что приведенное выше описание является всего лишь примером, и что установки момента открывания и/или закрывания впускного и выпускного клапанов могут меняться так, чтобы давать положительное или отрицательное перекрытие клапанов, позднее закрывание впускного клапана, или различные другие примеры.
Фиг.2 - структурная схема привода 200 на ведущие колеса транспортного средства. Привод 200 на ведущие колеса может быть механизирован двигателем 10, который может соответствовать двигателю 10 по фиг.1. Двигатель 10 может запускаться пусковой системой двигателя, такой как показанная на фиг.1, или посредством DISG 240. Кроме того, двигатель 10 может вырабатывать или регулировать крутящий момент посредством исполнительного механизма 204 крутящего момента, такого как топливная форсунка, дроссель и т.д.
Крутящий момент на выходном валу двигателя может передаваться на входную сторону маховика 232 двойной массы. Скорость вращения двигателя, а также положение и скорость вращения входной стороны маховика двойной массы могут определяться посредством датчика 118 положения двигателя. Маховик 232 двойной массы может включать в себя пружины и отдельные массы (не показаны) для демпфирования возмущений крутящего момента привода на ведущие колеса. Выходная сторона маховика 232 двойной массы показана в качестве являющейся механически присоединенной к входной стороне муфты 236 расцепления. Муфта 236 расцепления может быть с электрическим или гидравлическим приводом. Датчик 234 положения расположен на стороне муфты расцепления маховика 232 двойной массы для считывания выходного положения и частоты вращения маховика 232 двойной массы. Расположенная ниже по потоку сторона муфты 236 расцепления показана механически присоединенной к входному валу 237 DISG.
DISG 240 может приводиться в действие, чтобы выдавать крутящий момент на привод 200 на ведущие колеса или преобразовывать крутящий момент привода на ведущие колеса в электрическую энергию, которая должна накапливаться в устройстве 275 накопления энергии. DISG 240 имеет более высокую несущую способность по крутящему моменту на выходном валу, чем стартер 96, показанный на фиг.1. Кроме того, DISG 240 непосредственно приводит в движение привод 200 на ведущие колеса или непосредственно приводится в движение приводом 200 на ведущие колеса. Нет никаких ремней, шестерен или цепей для присоединения DISG 240 к приводу 200 на ведущие колеса. Скорее, DISG 240 вращается на той же самой частоте, что и привод 200 на ведущие колеса. Устройство 275 накопления электрической энергии может быть аккумуляторной батареей, конденсатором или катушкой индуктивности. Расположенная ниже по потоку сторона DISG 240 механически присоединена к насосному колесу 285 гидротрансформатора 206 через вал 241. Расположенная выше по потоку сторона DISG 240 механически присоединена к муфте 236 расцепления. Гидротрансформатор 206 включает в себя турбину 286 для вывода крутящего момента на входной вал 270. Входной вал 270 механически присоединяет гидротрансформатор 206 к автоматической трансмиссии 208. Гидротрансформатор 206 также включает в себя обходную блокировочную муфту 212 гидротрансформатора (TCC). Крутящий момент непосредственно передается с насосного колеса 285 на турбину 286, когда TCC 212 блокирована. TCC 212 электрически приводится в действие контроллером 12. В качестве альтернативы, TCC 212 может блокироваться гидравлически. В одном из примеров, гидротрансформатор 206 может указываться ссылкой как компонент трансмиссии. Скорость вращения и положение турбины гидротрансформатора могут определяться посредством датчика 239 положения. В некоторых примерах, однако, датчики 238 и/или 239 могут быть датчиками крутящего момента или комбинированными датчиками положения и крутящего момента.
Когда TCC 212 полностью расцеплена, гидротрансформатор 206 передает крутящий момент двигателя на автоматическую трансмиссию 208 посредством переноса текучей среды между турбиной 286 гидротрансформатора и насосным колесом 285 гидротрансформатора, тем самым давая возможность умножения крутящего момента. В противоположность, когда TCC 212 полностью зацеплена, крутящий момент на выходе двигателя передается непосредственно через TCC 212 на входной вал 270 трансмиссии 208. В качестве альтернативы, блокировочная TCC 212 может зацепляться частично, тем самым давая возможность регулирования величине крутящего момента, передаваемого непосредственно на трансмиссию. Контроллер 12 может быть выполнен с возможностью регулирования величины крутящего момента, передаваемого гидротрансформатором 206, посредством регулирования TCC 212 в ответ на различные условия эксплуатации двигателя или на основании основанного на водителе запроса режима работы двигателя.
Автоматическая трансмиссия 208 включает в себя муфты 211 передач (например, для передач 1-6) и муфту 210 переднего хода. Муфты 211 передач и муфта 210 переднего хода могут избирательно вводиться в зацепление для продвижения транспортного средства. Крутящий момент на выходе из автоматической трансмиссии 208, в свою очередь, может передаваться на колеса 216, чтобы приводить транспортное средство в движение, через выходной вал 260. Более точно, автоматическая трансмиссия 208 может передавать входной вращающий момент на входном валу 270 в ответ на состояние перемещения транспортного средства перед передачей выходного вращающего момента на колеса 216.
Кроме того, сила трения может прикладываться к колесам 216 посредством приведения в действие колесных тормозов 218. В одном из примеров, колесные тормоза 218 могут приводиться в действие в ответ на нажимание водителем его ступней на тормозную педаль (не показана). В других примерах, контроллер 12 или контроллер, связанный с контроллером 12, могут приводить в действие колесные тормоза. Таким же образом, сила трения у колес 216 может уменьшаться посредством отведения колесных тормозов 218 в ответ на отпускание водителем своей ступни с тормозной педали. Кроме того, колесные тормоза могут прикладывать силу трения к колесам 216 посредством контроллера 12 в качестве части процедуры автоматического останова двигателя.
Механический масляный насос 214 может находиться в сообщении по текучей среде с автоматической трансмиссией 208, чтобы выдавать гидравлическое давление для приведения в действие различных муфт, таких как муфта 210 переднего хода, муфта 211 передач и/или TCC 212. Механический масляный насос 214, например, может приводиться в действие в соответствии с гидротрансформатором 206 и может приводиться в движение вращением входного вала двигателя или DISG через входной вал 241. Таким образом, гидравлическое давление, вырабатываемое в механическом масляном насосе 214, может повышаться по мере того, как увеличиваются скорость вращения двигателя и/или скорость вращения DISG, и может снижаться по мере того, как уменьшается скорость вращения двигателя и/или скорость вращения DISG.
Контроллер 12 может быть выполнен с возможностью приема входных сигналов с двигателя 10, как подробнее показано на фиг.1, и соответствующим образом управления выходным крутящим моментом двигателя и/или работой гидротрансформатора, трансмиссии, DISG, муфт и/или тормозов. В качестве одного из примеров, крутящий момент на выходном валу двигателя может управляться посредством регулирования комбинации установки момента зажигания, длительности импульса топлива, установки момента импульса топлива и/или заряда воздуха посредством управления открыванием дросселя и/или установкой фаз клапанного распределения, подъемом клапана и давлением наддува для двигателей с нагнетателем и турбонагнетателем. В случае дизельного двигателя, контроллер 12 может управлять крутящим моментом на выходном валу двигателя, управляя комбинацией длительности импульса, установки момента импульса топлива и заряда воздуха. Во всех случаях, управление двигателем может выполняться на основе цилиндр за цилиндром, чтобы управлять крутящим моментом на выходном валу двигателя. Контроллер 12 также может управлять выходным крутящим моментом и выработкой электрической энергии из DISG посредством регулирования тока, протекающего в и из обмоток возбуждения и/или обмоток якоря DISG, как известно в данной области техники.
Далее, со ссылкой на фиг.3, показан примерный способ регулирования работой транспортного средства на основании типа обнаруженного устройства управления дорожным движением. Способ по фиг.3 может храниться в качестве выполняемых команд в постоянной памяти контроллера 12, показанного на фиг.1-2.
Этап 302 способа 300 включает в себя то, что определяют, обнаружено ли устройство управления дорожным движением. Например, знак остановки может обнаруживаться посредством одного или более из навигационной системы, использующей поиск по базе данных (например, поиск по правительственной базе данных), радарного обнаружения на борту транспортного средства, системы пассивного ответа, встроенной в знак остановки и/или камеры и обработки изображений, среди других примеров. Кроме того, способ может включать в себя этап, на котором оценивают знак остановки с использованием обработки изображений в качестве последней контрольной точки данных для осуществления точных настроек в отношении последующих вычислений. Светофор может обнаруживаться посредством одного или более из визуального распознавания (в том числе, идентификации изображения и расстояния от светофора), передаваемых сигналов между транспортным средством и передатчиком, установленным на светофоре, триангуляции на основании удаленных широковещательных передач (через сотовые вышки или другие обычные широковещательные системы наземного базирования), соединения с оборудованным GPS беспроводным устройством (в противоположность установленным на транспортном средстве или внешним системам поиска светофоров по базам данных) и/или сообщения местоположения транспортного средства (с использованием информации GPS наряду с навигационными системами и системами идентификации обочини т.д.) в центральную базу данных, которая передает, находится ли знак рядом, в числе других примеров. Следует понимать, что каждый из способов обнаружения устройства управления дорожным движением может использоваться независимо друг от друга или в качестве избыточных подтверждений для улучшения устойчивости к ошибкам и безопасности.
Если устройство управления дорожным движением обнаружено, т.е. ответом является «да», по способу 300 переходят на этап 304. Иначе, т.е. ответом является «нет», способ 300 завершают.
Этап 304 по способу 300 включает в себя то, что определяют, является ли обнаруженное устройство управления дорожным движением знаком остановки. Если ответом на этапе 304 является «да», по способу 300 переходят на этап 306 для регулирования работы транспортного средства в соответствии со способом 400 по фиг.4, как детализировано ниже. Иначе, если ответом на этапе 304 является «нет», по способу 300 переходят на этап 308.
Этап 308 по способу 300 включает в себя то, что определяют, является ли обнаруженное устройство управления дорожным движением светофором. Если ответом на этапе 308 является «да», по способу 300 переходят на этап 310 для регулирования работы транспортного средства в соответствии со способом 500 по фиг.5, как детализировано ниже. Иначе, если ответом на этапе 308 является «нет», способ 300 завершают.
В некоторых примерах, этапы 304 и 308 могут выполняться в ином порядке или одновременно. Подобным образом, в противоположность определению, является ли обнаруженное устройство управления дорожным движением знаком остановки, а затем, определению, является ли обнаруженное устройство управления дорожным движением светофором, оба из этих этапов могут происходить на этапе 302 (например, этап 302 может включать в себя то, что идентифицируют тип обнаруженного устройства управления дорожным движением при обнаружении устройства управления дорожным движением).
Далее, со ссылкой на фиг.4, она показывает примерный способ управления транспортным средством при обнаружении знака остановки, который должен использоваться вместе со способом 300 по фиг.3. Например, способ 400 могут выполнять на этапе 306 способа 300. Способ по фиг.4 может храниться в качестве выполняемых команд в постоянной памяти контроллера 12, показанного на фиг.1-2.
Этап 402 по способу 400 включает в себя то, что оценивают текущее состояние транспортного средства на основании расстояния между транспортным средством и перекрестком, связанным с обнаруженным знаком остановки, расстояния между транспортным средством и впереди идущим транспортным средством (например, транспортным средством спереди и в той же самой полосе движения, что и транспортное средство водителя), скорости транспортного средства и темпа замедления транспортного средства. В зависимости от способа обнаружения знака остановки, расстояние между транспортным средством и перекрестком, связанным со знаком остановки, может определяться с использованием способа визуального распознавания, среди других примеров. Расстояние между транспортным средством и впереди идущим транспортным средством (если оно существует) может определяться с использованием подхода, такого как используемый в адаптивных системах круиз-контроля, например, установленной на транспортной средстве радарной системы, которая идентифицирует расстояние интервала между транспортным средством водителя и впереди идущим транспортным средством, среди других примеров. Что касается скорости и темпа замедления транспортного средства, значения этих параметров могут сохраняться в системе управления (например, в памяти контроллера 12), чтобы они были легко доступны, когда оценивается текущее состояние транспортного средства.
После этапа 402 по способу 400 переходят на этап 404. Этап 404 по способу 400 включает в себя то, что определяют стратегию управления транспортным средством на основании текущего состояния транспортного средства (например, на основании различных параметров, описанных выше для этапа 402, на котором определяют текущее состояние транспортного средства). В одном из примеров, стратегия управления транспортным средством может быть частично основана на времени, которое требуется, чтобы транспортное средство достигло знака остановки (в материалах настоящего документа указанном ссылкой как параметр Z) при своей текущей скорости и темпе замедления. Ели X представляет расстояние от транспортного средства до перекрестка, Y представляет расстояние до следующего переднего транспортного средства (Y=0, если нет следующего переднего транспортного средства), параметр Z может быть вычислен с использованием функционального выражения, включающего в себя разность между X и Y (например, функционального выражения, включающего в себя разность между X и Y, чтобы Z было функцией X минус Y), а также текущую скорость и темп замедления транспортного средства. Как только определено Z, может быть возможным определять максимально возможную длительность для отключения двигателя и/или стратегию для минимизации отбора энергии при приближении транспортного средства к перекрестку и остановлено на перекрестке, как будет детализировано ниже. В качестве альтернативы или дополнительно, справочная таблица или другая структура данных может храниться в памяти системы управления транспортного средства, и стратегия управления, соответствующая различным параметрам текущего состояния транспортного средства, может определяться посредством осуществления доступа к надлежащему адресу в памяти системы управления. После этапа 404 по способу 400 переходят на этап 406.
Этап 406 по способу 400 включает в себя то, что определяют, будет ли стратегия управления введена в действие посредством автоматического режима или режима рекомендации водителю. В качестве используемого в материалах настоящего документа, автоматический режим может быть режимом, в котором система управления предпринимает действия для минимизации отбора энергии и экономии топлива независимо от водителя транспортного средства (например, не спрашивая разрешения у водителя транспортного средства и без ввода от водителя транспортного средства). В противоположность, ввод в действие стратегии управления в режиме рекомендации водителю может включать в себя рекомендацию водителю транспортного средства предложенных управляющих действий для доведения до максимума экономии топлива/минимизации отбора энергии, при этом водитель транспортного средства может выбирать, предпринимать или нет предложенные управляющие действия. Например, рекомендация может происходить посредством текста, отображаемого на приборной панели транспортного средства, или посредством звуковых уведомлений, которые слышны водителю транспортного средства. В некоторых примерах, водитель транспортного средства может выбирать между автоматизированным режимом и режимом рекомендации водителю, например, модифицируя настройки на приборной панели транспортного средства, и что режим всегда будет использоваться, когда транспортное средство приближается к перекрестку с устройством управления дорожным движением. В других примерах, однако, контроллер может быть уполномочен определять, какой режим вводить в действие, независимо от водителя транспортного средства, в зависимости от различных факторов. Например, если транспортное средство быстро приближается к знаку остановки, может быть предпочтительным вводить в действие автоматический режим, так как может не быть достаточно времени, чтобы водитель транспортного средства отвечал на рекомендацию касательно управления транспортным средством, выданную посредством режима рекомендации водителю. Однако если транспортное средство медленно приближается к знаку остановки, и есть достаточное время, чтобы водитель транспортного средства реагировал на видимую или слышимую рекомендацию из системы управления, может быть предпочтительным вводить в действие режим рекомендации водителю. Соответственно, в некоторых примерах, контроллер может быть уполномочен управлять работой транспортного средства в автоматическом режиме во время быстрого приближения к знаку остановки, тогда как режим рекомендации водителю может использоваться во время медленного приближения к знаку остановки.
Если определено, что стратегия управления должна вводиться в действие в автоматическом режиме, по способу 400 переходят на этап 408, чтобы вводить в действие стратегию управления в автоматическом режиме. Ввод в действие стратегии управления в автоматическом режиме, например, может включать в себя этапы, на которых отключают двигатель на максимально возможную длительность при приближении транспортного средства к перекрестку, и пока транспортное средство остановлено на перекрестке. Например, в транспортных средствах с гибридным приводом и транспортных средствах, использующих методологии управления остановом/запуском двигателя, заблаговременное обнаружение приближающегося знака остановки может давать системе управления возможность отключать двигатель на максимально возможную длительность. Например, двигатель может отключаться при приближении транспортного средства к знаку остановки, так как транспортному средству потребуется остановиться на знаке остановки на определенную длительность.
В качестве альтернативы или дополнительно, ввод в действие стратегии управления в автоматическом режиме может включать в себя этап, на котором минимизируют отбор энергии при приближении транспортного средства к перекрестку, и пока транспортное средство остановлено на перекрестке. Например, минимизация отбора энергии может включать в себя операцию понижения и/или модификации нагрузки по запрещению режимов работы подсистем, таких как обнаруживаемые у автоматической системы кондиционирования воздуха, состояния заряда аккумуляторной батареии т.д., для того чтобы добиваться отключения двигателя. Принятие таких мер может повышать возможную длительность опустошающей заряд работы транспортного средства, среди других преимуществ.
Иначе, если определено, что стратегия управления должна вводиться в действие с помощью режима рекомендации водителю, по способу 400 переходят на этап 410 для ввода в действие стратегии управления в режиме рекомендации водителю. Например, ввод в действие стратегии управления в режиме рекомендации водителю может включать в себя этапы, на которых рекомендуют водителю транспортного средства предпринять действия для отключения двигателя на максимально возможную длительность при приближении транспортного средства к перекрестку, и пока транспортное средство остановлено на перекрестке (например, рекомендуют водителю транспортного средства через устройство отображения, такое как приборная панель транспортного средства, или посредством звуковых уведомлений, как обсуждено выше). В качестве альтернативы или дополнительно, ввод в действие стратегии управления в режиме рекомендации водителю может включать в себя этап, на котором рекомендуют водителю транспортного средства предпринять действия, которые минимизируют отбор энергии при приближении транспортного средства к перекрестку, и пока транспортное средство остановлено на перекрестке.
Далее, со ссылкой на фиг.5, она показывает примерный способ 500 управления транспортным средством, когда обнаружен светофор, который должен использоваться вместе со способом 300 по фиг.3. Например, способ 500 могут выполнять на этапе 310 способа 300. Способ по фиг.5 может храниться в качестве выполняемых команд в постоянной памяти контроллера 12, показанного на фиг.1-2.
Этап 502, подобно этапу 402 способа 400, по способу 500 включает в себя то, что оценивают текущее состояние транспортного средства, основанное на расстоянии между транспортным средством и перекрестком, связанным со светофором, расстоянии между транспортным средством и впереди идущим транспортным средством, скорости транспортного средства и темпе замедления транспортного средства. После этапа 502, по способу 500 переходят на этап 504.
Этап 504 по способу 500 включает в себя то, что определяют текущее состояние светофора. Текущее состояние светофора может включать в себя красное, желтое или зеленое, в каждом случае указывающее ссылкой на конкретную длину волны света, испускаемого светофором. Как следует понимать рядовым специалистам в данной области техники, красное состояние светофора может указывать, что транспортные средства, приближающиеся к светофору, должны остановиться на перекрестке, зеленое состояние светофора может указывать, что транспортные средства должны продолжать движение через перекресток, а желтое состояние светофора может указывать, что транспортные средства должны замедляться и останавливаться на перекрестке, если возможно, так как состояние светофора скоро переключится на красное. Определять состояния светофора могут различными способами. Например, состояние светофора могут определять посредством способа визуального распознавания, который использует датчики для выявления состояния светофора. В качестве еще одного примера, состояние светофора могут определять посредством использования сигнала, передаваемого между транспортным средством и передатчиком, установленным на светофоре. В качестве еще одного другого примера, местоположение транспортного средства могут сообщать в центральную базу данных (например, с использованием информации GPS, системы идентификации обочини т.д.), и центральная база данных затем может передавать состояние светофора близлежащего светофора на транспортное средство. Следует понимать, что различные способы для определения состояния светофора могут использоваться независимо друг от друга, или в качестве многочисленных избыточных подтверждений для улучшения устойчивости к ошибкам и безопасности. После этапа 504 по способу 500 переходят на этап 506.
Этап 506 по способу 500 включает в себя то, что прогнозируют временные характеристики изменения состояния светофора. Например, как только было определено текущее состояние светофора, один или более таймеров могут инициироваться для прогнозирования временных характеристик следующего изменения состояния светофора. Таймер(ы) может делать будущие алгоритмические предположения на основании калиброванного минимального времени для ожидания между изменениями состояний при переменных временных характеристиках светофора. По выбору, информация о временных характеристиках, основанная на местоположении светофора, может сохраняться в адаптивной установленной на транспортном средстве или внешней базе данных, которая может подвергаться доступу контроллером для использования на этапе прогнозирования временных характеристик изменения состояния светофора. В еще одном примере, сигналы, передаваемые между транспортным средством и передатчиком, установленным на светофоре (как обсуждено выше), могут указывать время, оставшееся до следующего изменения состояния, в дополнение к указанию текущего состояния светофора. Передатчик может распознавать приближающееся транспортное средство и передавать сигналы на транспортное средство для предоставления транспортному средству данных касательно текущего состояния светофора, времени, оставшегося до следующего изменения состояния, текущего расстояния между транспортным средством и перекресткоми т.д. В заключение, в примерах, в которых временные характеристики светофора управляются централизованно, местоположение транспортного средства (которое определено с использованием информации GPS, системы идентификации обочин или другого подобного способа) может использоваться для извлечения текущего состояния светофора и времени, оставшегося до следующего изменения состояния, среди другой информации.
Следует понимать, что каждый из вышеприведенных способов прогнозирования временных характеристик изменения состояния светофора может использоваться независимо друг от друга, или в качестве многочисленных избыточных подтверждений для улучшения устойчивости к ошибкам и безопасности. Кроме того, транспортное средство может быть выполнено с возможностью оценивания светофора с использованием обработки изображений в качестве последней контрольной точки данных, чтобы производить точные регулировки для последующих вычислений в отношении временных характеристик следующего изменения состояния светофора.
После этапа 506 по способу 500 переходят на этап 508. Этап 508 по способу 500 включает в себя то, что определяют стратегию управления транспортным средством на основании текущего состояния транспортного средства, текущего состояния светофора и прогнозируемых временных характеристик изменения состояния светофора. Тогда как этап 404 способа 400 включает в себя то, что определяют стратегию управления транспортным средством на основании текущего состояния транспортного средства, этап 508 включает в себя то, что определяют стратегию управления транспортным средством на основании текущего состояния транспортного средства, а также на основании дополнительных факторов текущего состояния светофора и прогнозируемых временных характеристик изменения состояния светофора (например, так как транспортное средство всегда должно останавливаться на знаке остановки, тогда как транспортное средство ведет себя по разному при приближении к светофору в зависимости от состояния/временных характеристик светофора). Как показано, этот этап, по выбору, включает в себя этап, на котором вычисляют скорость, с которой транспортное средство будет достигать светофора, когда светофор зеленый. Например, параметр Z, описанный выше со ссылкой на способ 400, может использоваться для вычисления скорости, с которой транспортному средству будет необходимо двигаться, чтобы прибыть на светофор, когда его состояние является зеленым (например, чтобы избежать не эффективностей использования топлива и энергии, связанных с торможением, а затем ускорением вскоре после этого, вследствие прибытия на светофор незадолго до того, как его состояние меняется с красного на зеленое). Если предельная скорость в текущем местоположении транспортного средства известна, предельная скорость также может учитывать вычисление скорости, с которой транспортному средству будет необходимо ехать, чтобы прибыть на светофор, когда его состояние зеленое, наряду с калибровкой минимальной требуемой скорости. Такие вычисления могут давать возможность управления скоростью транспортного средства, состоянием включения/отключения двигателя и торможением, чтобы гарантировать, что транспортное средство достигнет перекрестка с требуемыми техническими характеристиками. Требуемые технические характеристики могут включать в себя минимизацию потребления топлива, например, посредством останова двигателя на требуемую длительность.
После этапа 508 по способу 500 переходят на этап 510. Этап 510, подобно этапу 406 способа 400, по способу 500 включает в себя то, что определяют, будет ли стратегия управления введена в действие посредством автоматического режима или режима рекомендации водителю. В некоторых примерах, водитель транспортного средства может выбирать между автоматическим режимом и режимом рекомендации водителю. В других примерах, контроллер может определять, какой режим ввести в действие, независимо от водителя транспортного средства. Например, если транспортное средство быстро приближается к светофору, может быть предпочтительным вводить в действие автоматический режим, так как может не быть достаточно времени, чтобы водитель транспортного средства отвечал на рекомендацию касательно управления транспортным средством, выданную посредством режима рекомендации водителю.
Если определено, что стратегия управления будет введена в действие в автоматическом режиме, по способу 500 переходят на этап 512, чтобы вводить в действие стратегию управления в автоматическом режиме. По выбору, это может включать в себя этап, на котором управляют транспортным средством, чтобы оно перемещалось со скоростью, вычисленной на этапе 508, чтобы транспортное средство прибыло на перекресток, когда светофор зеленый. В других примерах, подобно этапу 408 способа 400, ввод в действие стратегии управления в автоматическом режиме может включать в себя этап, на котором отключают двигатель на максимально возможную длительность при приближении транспортного средства к перекрестку, и пока транспортное средство остановлено на перекрестке. Например, если текущее состояние транспортного средства и текущее состояние светофора исключают возможность прибытия транспортного средства на светофор, когда его состояние зеленое, стратегия управления может включать в себя этап, на котором отключают двигатель при приближении транспортного средства к светофору, чтобы преимущественно минимизировать отбор энергии.
Иначе, если определено, что стратегия управления будет введена в действие в режиме рекомендации водителю, по способу 500 переходят на этап 514 для ввода в действие стратегии управления в режиме рекомендации водителю. По выбору, это может включать в себя этап, на котором рекомендуют водителю транспортного средства ехать со скоростью, вычисленной на этапе 508. Водитель транспортного средства, в таком случае, может следовать рекомендации, чтобы прибыть на светофор, когда он зеленый, или водитель транспортного средства может игнорировать рекомендацию, если требуется. Например, в определенных обстоятельствах, водитель транспортного средства может предпочесть остановиться на светофоре вопреки сбережениям топлива и/или энергии, которые могут проистекать из следования рекомендации, предложенной посредством режима рекомендации водителю. Например, водитель транспортного средства может предпочесть остановиться на перекрестке, чтобы купить газету у продавца, расположенного на перекрестке, или покрасить губы, или зажечь сигарету, или вставить компакт-диск в проигрыватель компакт-дисков транспортного средстваи т.д. Таким образом, режим рекомендации водителю преимущественно может снабжать водителя транспортного средства способом экономии топлива и сбережения энергии наряду с сохранением свободы водителя транспортного средства выбирать, когда останавливаться на светофоре. В других примерах, подобно этапу 410 способа 400, ввод в действие стратегии управления в автоматическом режиме может включать в себя этап, на котором рекомендуют водителю транспортного средства предпринять действия, которые приведут к отключению двигателя на максимально возможную длительность при приближении транспортного средства приближается к перекрестку, и пока транспортное средство остановлено на перекрестке. Например, если текущее состояние транспортного средства и текущее состояние светофора исключают возможность прибытия транспортного средства на светофор, когда его состояние зеленое, стратегия управления может включать в себя этап, на котором рекомендуют водителю транспортного средства предпринять действия, которые приведут к отключению двигателя при приближении транспортного средства к светофору, чтобы преимущественно минимизировать отбор энергии.
В соответствии с еще одной примерной стратегией управления (не показанной), транспортное средство может функционировать в автоматическом режиме, если водитель транспортного средства не игнорирует или не отменяет управление. В одном из примеров, двигатель может автоматически отключаться при движении транспортного средства накатом, чтобы остановиться на перекрестке, но водитель может игнорировать или отменять это управление, чтобы поддерживать двигатель включенным во время периода движения накатом. В еще одном примере, скорость движения накатом от привода на ведущие колеса может устанавливаться при съеме ступни водителя с педали акселератора, чтобы прибывать на светофор с требуемым характерным алгоритмом остановки для достижения требуемой экономии топлива, и чтобы останавливать транспортное средство с требуемым временем в состоянии покоя. Скорость движения накатом от привода на ведущие колеса может быть функцией времени (например, времени, оставшегося до цели, такой как перекресток или пункт назначения транспортного средства), расстояния (например, расстояния, оставшегося до цели, такой как перекресток или пункт назначения транспортного средства), требуемого периода состояния покояи т.д. Кроме того, скорость движения накатом от привода на ведущие колеса может учитывать соображения доведения до максимума подзарядки, рекуперациии т.д. Однако если водитель нажимает педаль акселератора, управление транспортным средством переключается в режим рекомендации водителю до тех пор, пока педаль акселератора не отпущена снова. Информация, используемая режимом рекомендации водителю, регулируется на основании новой скорости и темпа ускорения транспортного средства, обусловленных нажатием педали акселератора.
Далее, со ссылкой на фиг.6, она показывает примерный способ 600 регулирования работы транспортного средства, в том числе регулирования работы муфты расцепления транспортного средства, на основании типа обнаруженного устройства управления дорожным движением. Например, муфта расцепления может соответствовать муфте 236 расцепления по фиг.2. Способ по фиг.6 может храниться в качестве выполняемых команд в постоянной памяти контроллера 12, показанного на фиг.1-2.
Этап 602 по способу 600 включает в себя то, что определяют, обнаружено ли устройство управления дорожным движением. Например, устройство управления дорожным движением может обнаруживаться посредством способов, описанных выше со ссылкой на фиг.3.
Если ответом на этапе 602 является «нет», способ 600 завершают. Иначе, по способу 600 переходят на этап 604. Этап 604 по способу 600 включает в себя то, что определяют, является ли обнаруженное устройство управления дорожным движением знаком остановки. Если ответом на этапе 604 является «да», по способу 600 переходят на этап 606 для регулирования работы транспортного средства, в том числе, регулирования работы муфты расцепления транспортного средства, в соответствии со способом 700 по фиг.7, как детализировано ниже. Иначе, если ответом на этапе 604 является «нет», по способу 600 переходят на этап 608.
Этап 608 по способу 600 включает в себя определение, является ли обнаруженное устройство управления дорожным движением светофором. Если ответом на этапе 608 является «да», по способу 600 переходят на этап 610 регулирования работы транспортного средства, в том числе, регулирования работы муфты расцепления транспортного средства, в соответствии со способом 600 по фиг.6, как детализировано ниже. Иначе, если ответом на этапе 608 является «нет», способ 600 завершают.
В некоторых примерах, этапы 604 и 608 могут выполняться в ином порядке или одновременно. Подобным образом, в противоположность определению, является ли обнаруженное устройство управления дорожным движением знаком остановки, а затем, определению, является ли обнаруженное устройство управления дорожным движением светофором, оба из этих этапов могут происходить на этапе 602 (например, этап 602 может включать в себя этап, на котором идентифицируют тип обнаруженного устройства управления дорожным движением при обнаружении устройства управления дорожным движением).
Далее, со ссылкой на фиг.7, она показывает примерный способ 700 эксплуатации транспортного средства и муфты расцепления транспортного средства, когда обнаружен знак остановки. Способ по фиг.7 может храниться в качестве выполняемых команд в постоянной памяти контроллера 12, показанного на фиг.1-2.
Этап 702, подобно этапу 402 способа 400, по способу 700 включает в себя то, что оценивают текущее состояние транспортного средства, текущее состояние транспортного средства основано на расстоянии между транспортным средством и перекрестком, связанным с обнаруженным знаком остановки, расстоянии между транспортным средством и впереди идущим транспортным средством (если таковое существует), скорости транспортного средства и темпе замедления транспортного средства. После этапа 702, по способу 700 переходят на этап 704.
Этап 704 по способу 700 включает в себя то, что определяют требуемое время для размыкания муфты расцепления на основании текущего состояния транспортного средства и размыкают муфту расцепления на требуемое время. Как описано выше со ссылкой на фиг.2, размыкание муфты расцепления включает в себя этап, на котором отсоединяют двигатель от привода на ведущие колеса транспортного средства, и таким образом, двигатель может отключаться для повышения эффективности использования топлива, при разомкнутой муфте расцепления. Соответственно, требуемое время для размыкания муфты расцепления может соответствовать требуемому времени для отключения двигателя, основанному на текущем состоянии транспортного средства. Текущее состояние транспортного средства может определять максимально возможную длительность отключения двигателя - например, если расстояние между транспортным средством и перекрестком, связанным со знаком остановки, относительно мало, максимально возможная длительность отключения двигателя может быть более короткой по сравнению со сценарием, в котором есть более длинное расстояние между транспортным средством и перекрестком, связанным со знаком остановки, в зависимости от значений других интересующих параметров (например, темпа замедления, расстояния между транспортным средством и впереди идущим транспортным средствоми т.д.). После этапа 704 по способу 700 переходят на этап 706.
Этап 706 по способу 700 включает в себя то, что преобразуют крутящий момент с колес транспортного средства в электрическую энергию посредством стартера/генератора. Стартер/генератор, например, может быть DISG 240 по фиг.2. Во время условий, при которых муфта расцепления разомкнута, двигатель отсоединен от стартера/генератора и, соответственно, преобразование крутящего момента колес в электрическую энергию может выполняться (как описано в материалах настоящего документа со ссылкой на фиг.2). После этапа 706 по способу 700 переходят на этап 708.
Этап 708 по способу 700 включает в себя то, что накапливают электрическую энергию (то есть, электрическую энергию, получающуюся из преобразования крутящего момента колес на этапе 706) в устройстве накопления электрической энергии. Например, устройство накопления электрической энергии может быть устройством 275 накопления электрической энергии по фиг.2. Преимущественно, электрическая энергия, накопленная в устройстве накопления электрической энергии, может использоваться для выдачи крутящего момента на колеса транспортного средства во время условий низкого потребления крутящего момента без вынуждения приводить в действие двигатель. Накопленная энергия также может помогать при перезапуске двигателя из состояния без вращения, как описано выше со ссылкой на фиг.2.
После этапа 708 по способу 700 переходят на этап 710. Этап 710 по способу 700 включает в себя то, что смыкают муфту расцепления для присоединения двигателя к приводу на ведущие колеса после того, как транспортное средство остановлено на перекрестке на требуемую длительность. Смыкание муфты расцепления для присоединения двигателя к приводу на ведущие колеса таким образом может давать возможность передачи крутящего момента с двигателя на колеса транспортного средства, чтобы транспортное средство могло продвигаться вперед двигателем после остановки на знаке остановки на требуемую длительность.
Далее, со ссылкой на фиг.8, она показывает примерный способ 800 эксплуатации транспортного средства и муфты расцепления транспортного средства, когда обнаружен светофор. Способ по фиг.8 может храниться в качестве выполняемых команд в постоянной памяти контроллера 12, показанного на фиг.1-2.
Этап 802, подобно этапу 502 способа 500, по способу 800 включает в себя то, что оценивают текущее состояние транспортного средства, основанное на расстоянии между транспортным средством и перекрестком, расстоянии между транспортным средством и впереди идущим транспортным средством, скорости транспортного средства и темпе замедления транспортного средства. После этапа 802 способ 800 продолжают на этапе 804.
Этап 804, подобно этапам 504 и 506 способа 500, по способу 800 включает в себя то, что определяют текущее состояние светофора и прогнозируют временные характеристики изменения состояния светофора. После этапа 804 способ 800 продолжают на этапе 806.
Этап 806 по способу 800 включает в себя то, что определяют, будет ли посредством остановки на перекрестке достигнута требуемая производительность, на основании текущего состояния транспортного средства, текущего состояния светофора и прогнозируемых временных характеристик изменения состояния светофора. В зависимости от текущего состояния транспортного средства, текущего состояния светофора и прогнозируемых временных характеристик изменения состояния светофора, технические характеристики транспортного средства (например, экономия топлива и/или эффективность использования энергии) могут улучшаться или могут не улучшаться посредством остановки на перекрестке. Например, если спрогнозировано, что состояние светофора вскоре изменится с красного на зеленый, посредством остановки на перекрестке можно не достигнуть требуемой производительности (например, так как длительность отключения двигателя была бы слишком короткой, чтобы оправдывать включение и отключение двигателя ввиду неизбежного состояния светофора). В противоположность, если спрогнозировано, что относительно длительный период времени остается до того, как состояние светофора будет зеленым, посредством остановки на перекрестке можно достигнуть требуемой производительности, так как может быть возможной более продолжительная длительность отключения двигателя. Несмотря на то, что эти примеры описывают определение, основанное на прогнозируемых временных характеристиках изменения исключительно состояния светофора, ради простоты, следует понимать, что определение также основано на текущем состоянии транспортного средства и текущем состоянии светофора, среди других факторов.
После этапа 806 по способу 800 переходят на этап 808. На этапе 808, в зависимости от результата определения, произведенного на этапе 806, по способу 800 переходят на этап 810 или на этап 812. То есть, если посредством остановки на перекрестке будет достигнута требуемая производительность транспортного средства, по способу 800 переходят на этап 810. Этап 810, подобно этапу 704 способа 700, по способу 800 включает в себя то, что определяют момент времени для размыкания муфты расцепления, чтобы останавливать транспортное средство на перекрестке, и размыкают муфту расцепления в такой момент времени. После этапа 810, способ 800 завершают.
Иначе, если посредством остановки на перекрестке не достигают требуемой производительности транспортного средства, по способу 800 переходят с этапа 808 на этап 812. Этап 812, подобно этапу 508 способа 500, по способу 800 включает в себя то, что вычисляют скорость, с которой транспортное средство прибудет на перекресток, когда состояние светофора является зеленым. После этапа 812, по способу 800 переходят на этап 814.
Этап 814 по способу 800 включает в себя то, что определяют, достижима ли вычисленная скорость, если муфта расцепления размыкается по меньшей мере на минимальную длительность. В качестве одного из примеров, если текущая скорость транспортного средства имеет значение 50 миль в час (mph), транспортное средство на данный момент не является замедляющимся, и вычисленная скорость имеет значение 20 mph, может быть возможным достичь вычисленной скорости, размыкая муфту расцепления на минимальную длительность (так как большое снижение скорости необходимо для достижения вычисленной скорости). Однако, в качестве еще одного примера, если текущая скорость транспортного средства имеет значение 25 mph и транспортное средство является замедляющимся с темпом 1 mph в секунду, а вычисленная скорость имеет значение 20 mph, может не быть возможным добиваться вычисленной скорости посредством размыкания муфты расцепления на минимальную длительность (например, 5 секунд), так как действие, таким образом, приводило бы к падению скорости транспортного средства ниже вычисленной скорости.
Если ответом на этапе 814 является «нет», по способу 800 переходят на этап 816. Этап 816 по способу 800 включает в себя то, что осуществляют движение на вычисленной скорости (например, движение на скорости, вычисленной на 814, и не размыкание муфты расцепления). После этапа 816 способ 800 завершают.
Иначе, если ответом на этапе 814 является «да», по способу 800 переходят на этап 818. Этап 818 по способу 800 включает в себя то, что осуществляют движение на вычисленной скорости и размыкают муфту расцепления на по меньшей мере минимальную длительность. Например, размыкание муфты расцепления на по меньшей мере минимальную длительность может давать возможность отключения двигателя на по меньшей мере минимальную длительность, тем самым улучшая экономию топлива и эффективность использования энергии. После этапа 818 по способу 800 переходят на этап 820.
Этап 820, подобно этапам 706 и 708 способа 700, по способу 800 включает в себя при разомкнутой муфте расцепления то, что преобразовывают крутящий момент с колес транспортного средства в электрическую энергию посредством стартера/генератора и накапливают электрическую энергию в устройстве накопления электрической энергии. После этапа 820 способ 800 завершают.
Далее, со ссылкой на фиг.9, она показывает еще один примерный способ регулирования работы транспортного средства, в том числе регулирования работы муфты расцепления транспортного средства, на основании типа обнаруженного устройства управления дорожным движением. Способ по фиг.9 может храниться в качестве выполняемых команд в постоянной памяти контроллера 12, показанного на фиг.1-2.
Этап 902 по способу 900 включает в себя то, что определяют, обнаружено ли устройство управления дорожным движением на перекрестке, к которому приближается транспортное средство. Если устройство управления дорожным движением обнаружено, ответом является «да», то по способу 900 переходят на этап 904. Иначе, если ответом является «нет», то способ 900 завершают.
Этап 904 по способу 900 включает в себя то, что получают данные транспортного средства. Данные транспортного средства, например, могут включать в себя скорость, ускорение и местоположение. После этапа 904 по способу 900 переходят на этап 906.
Этап 906, подобно этапам 402, 502 и 702 способов 400, 500 и 700, соответственно, по способу 900 включает в себя то, что оценивают состояние транспортного средства на основании данных транспортного средства, полученных на этапе 904. После этапа 906 по способу 900 переходят на этап 908.
Этап 908 по способу 900 включает в себя то, что определяют, является ли обнаруженное устройство управления дорожным движением знаком остановки или светофором, например, посредством способа, описанного выше для способов 300 и 600. Если обнаружен знак остановки, по способу 900 переходят на этап 910.
Этап 910 по способу 900 включает в себя то, что определяют, следует ли использовать автоматический режим или режим рекомендации водителю, например, посредством способа, описанного выше для способов 400 и 500. Если ответ на 910 состоит в том, что следует использовать автоматический режим, по способу 900 переходят на этап 912.
Этап 912 по способу 900 включает в себя то, что определяют и вводят в действие стратегию управления в автоматическом режиме. Например, стратегия управления может включать в себя этапы, на которых вычисляют максимально возможную длительность для отключения двигателя на основании состояния транспортного средства (например, состояния транспортного средства, оцененного на этапе 906). Кроме того, стратегия управления может включать в себя этап, на котором размыкают муфту расцепления и отключают двигатель на максимально возможную длительность, как описано выше со ссылкой на фиг.4. После этапа 912 способ 900 завершают.
Иначе, если ответ на этапе 910 состоит в том, чтобы использовать режим рекомендации водителю, по способу 900 переходят на этап 914. Этап 914 по способу 900 включает в себя то, что определяют и вводят в действие стратегию управления в режиме рекомендации водителю. Например, стратегия управления может включать в себя этап, на котором вычисляют максимально возможную длительность для отключения двигателя на основании состояния транспортного средства (например, состояния транспортного средства, оцененного на этапе 906). Кроме того, стратегия управления может включать в себя этап, на котором рекомендуют водителю транспортного средства предпринять действия, которые будут приводить к размыканию муфты расцепления и отключению двигателя на максимально возможную длительность, как описано выше со ссылкой на фиг.4. После этапа 914 способ 900 завершают.
Однако если на этапе 908 определено, что обнаружен светофор, по способу 900 переходят на этап 916. Этап 916 по способу 900 включает в себя то, что определяют, следует ли использовать автоматический режим или режим рекомендации водителю, например, посредством способа, описанного выше для способов 400 и 500. Если ответ на этапе 916 состоит в том, что следует использовать автоматический режим, по способу 900 переходят на этап 918.
Этап 918 по способу 900 включает в себя то, что определяют и вводят в действие стратегию управления в автоматическом режиме. Например, стратегия управления может включать в себя этап, на котором вычисляют максимально возможную длительность для отключения двигателя на основании состояния транспортного средства (то есть, состояния транспортного средства, оцененного на этапе 906) и состояния светофора. Таким образом, в противоположность этапу 912, на котором максимально возможная длительность для отключения двигателя основана исключительно на состоянии транспортного средства, на этапе 918 также принимают во внимание состояние светофора при определении максимально возможной длительности для отключения двигателя. Кроме того, стратегия управления может включать в себя этапы, на которых размыкают муфту расцепления и отключают двигатель на максимально возможную длительность, как описано выше со ссылкой на фиг.4. После этапа 918 способ 900 завершают.
Иначе, если ответ на этапе 916 состоит в том, чтобы использовать режим рекомендации водителю, по способу 900 переходят на этап 920. Этап 920 по способу 900 включает в себя то, что определяют и вводят в действие стратегию управления в режиме рекомендации водителю. Например, стратегия управления может включать в себя этап, на котором вычисляют максимально возможную длительность для отключения двигателя на основании состояния транспортного средства (то есть, состояния транспортного средства, оцененного на этапе 906) и состояния светофора. Кроме того, стратегия управления может включать в себя этап, на котором рекомендуют водителю транспортного средства предпринять действия, которые будут размыкать муфту расцепления и отключать двигатель на максимально возможную длительность, как описано выше со ссылкой на фиг.4. После этапа 920 способ 900 завершают.
Следует понимать, что, в дополнительных вариантах осуществления, автоматический режим и режим рекомендации водителю могут придавать особое значение безопасности в дополнение к или вместо экономии топлива и эффективности использования энергии.
Например, когда транспортное средство приближается к перекрестку со знаком остановки, уведомление водителя (например, уведомление на приборной панели или звуковое уведомление) может информировать водителя о приближающемся знаке остановки. Таким образом, растерянный в иных обстоятельствах водитель транспортного средства, может понимать, что необходимо остановиться на перекрестке вместо подвергания риску своей собственной безопасности и безопасности других водителей других транспортных средств и пешеходов невыполнением остановки на перекрестке. В качестве альтернативы, когда транспортное средство приближается к перекрестку со светофором, уведомление водителя может информировать водителя о приближающемся светофоре, в том числе, информацией о состоянии светофора и прогнозируемых временных характеристиках следующего изменения состояния. Таким образом, водитель может принимать обоснованное решение, например, следует ли поддерживать текущую скорость/ускорение транспортного средства (когда есть достаточное время, чтобы транспортное средство безопасно продолжило движение через перекресток, при зеленом или желтом световом сигнале) или тормозить (когда нет достаточного времени, чтобы транспортное средство безопасно продолжало движение через перекресток до того, как светофор переключается с желтого на красный).
В качестве еще одного примера, предвосхищены режимы родительского предупреждения и контроля. Несмотря на то, что термин «родительский» может указывать ссылкой на родителей несовершеннолетнего (например, подросткового возраста) водителя транспортного средства в этом контексте, он также может, в более широком смысле, указывать ссылкой на слежение и контроль за поведением водителя транспортного средства любого возраста. Например, во время работы в режиме родительского предупреждения, транспортное средство может быть выполнено с возможностью передачи текстового сообщения, электронного письмаи т.д., или сохранения отчета о происшествии, когда транспортное средство не останавливается на требуемую длительность на знаке остановки или вообще не останавливается на знаке остановки. Кроме того, транспортное средство может быть выполнено с возможностью передачи текстового сообщения, электронного письмаи т.д., или сохранения отчета о происшествии, когда транспортное средство нарушает сигнал светофора, продолжая движение через перекресток, когда состояние светофора красное (и/или когда состояние светофора желтое, и время, оставшееся до следующего изменения состояния светофора, является меньшим, чем заданное время). В соответствии с режимом родительского контроля, заданное время покоя транспортного средства может автоматически принудительно применяться, когда транспортное средство прибывает на перекресток со знаком остановки. Подобным образом, остановка транспортного средства может принудительно применяться, когда транспортное средство прибывает на перекресток со светофором в красном состоянии, когда выявлен надлежащий тормозной путь. В любом случае (знака остановки или светофора), может иметься в распоряжении вариант выбора водительской отмены. Вариант выбора водительской отмены может вводиться в действие водителем, нажимающим, а затем отпускающим тормозную педаль и/или педаль акселератора, или посредством обнаружения неизбежного столкновения (например, заднего, бокового или переднего столкновения), выхода из полосы движения, приведения в действие кнопки отмены, резкого рулевого управления, приведения в действие ABS/регулирования тягового усилияи т.д. Кроме того, требуемые технические характеристики транспортного средства могут специально приспосабливаться водителем для приоритизации или конфигурирования требуемой реакции согласно его предпочтениям.
Например, если транспортное средство вскоре прибудет на перекресток со знаком остановки, транспортное средство должно останавливаться на определенную длительность по прибытию на перекресток. По существу, после обнаружения приближающегося знака остановки, транспортное средство может управляться некоторым образом, который повышает безопасность и эффективность использования топлива ввиду приближающейся остановки. В противоположность, если определено, что транспортное средство вскоре прибудет на перекресток со светофором, может производиться дополнительное определение в отношении того, будет ли транспортному средству необходимо останавливаться по прибытию на перекресток, и если так, насколько долго, на основании различных факторов, таких как состояние сигнала регулирования движения (например, цвета светового сигнала и времени, оставшегося до тех пор, пока не изменяется цвет) и расстояние интервала между транспортным средством и впереди идущим транспортным средством в той же полосе движения (если таковое существует). На основании таких определений, надлежащая стратегия управления может использоваться при приближении транспортного средства к и по прибытии на перекресток со светофором.
Следует понимать, что способы, описанные в материалах настоящего документа, предоставлены в качестве примера и, таким образом, не подразумеваются ограничивающими. Поэтому, следует понимать, что способы, описанные в материалах настоящего документа, могут включать в себя дополнительные и/или альтернативные этапы, нежели проиллюстрированные на фиг.3-9, не выходя из объема этого раскрытия. Кроме того, следует понимать, что способы, описанные в материалах настоящего документа, не ограничены проиллюстрированным порядком; скорее, один или более этапов могут быть изменены или не включены в состав, не выходя из объема этого раскрытия.
Отметим, что примерные процедуры управления и оценки, включенные в материалы настоящего документа, могут использоваться с различными конфигурациями систем двигателя и/или транспортного средства. Конкретные процедуры, описанные в материалах настоящего документа, могут представлять собой одну или более из любого количества стратегий обработки, таких как управляемая событиями, управляемая прерыванием, многозадачная, многопоточная и тому подобная. По существу, проиллюстрированные различные этапы, операции или функции могут выполняться в проиллюстрированной последовательности, параллельно, или в некоторых случаях пропускаться. Подобным образом, порядок обработки необязательно требуется для достижения признаков и преимуществ примерных вариантов осуществления, описанных в материалах настоящего документа, но приведен для облегчения иллюстрации и описания. Один или более из проиллюстрированных этапов или функций могут выполняться неоднократно, в зависимости от конкретной используемой стратегии. Кроме того, примерные процедуры могут графически представлять управляющую программу, которая должна быть запрограммирована на машинно-читаемый носитель в контроллере.
Следует понимать, что конфигурации и процедуры, раскрытые в материалах настоящего документа, являются примерными по сути, и что эти конкретные варианты осуществления не должны рассматриваться в ограничительном смысле, так как возможны многочисленные варианты. Например, вышеприведенная технология может быть применена к типам двигателя V6, I-4, I-6, V-12, оппозитному 4-цилиндровому и другим типам двигателя. Предмет настоящего изобретения включает в себя все новейшие и неочевидные комбинации и подкомбинации различных систем и конфигураций, и другие признаки, функции и/или свойства, раскрытые в материалах настоящего документа.
Последующая формула изобретения подробно указывает некоторые комбинации и подкомбинации, рассматриваемые в качестве новейших и неочевидных. Эти пункты формулы изобретения могут указывать ссылкой на элемент в единственном числе либо «первый» элемент или его эквивалент. Следует понимать, что такие пункты формулы изобретения включают в себя объединение одного или более таких элементов, не требуя и не исключая двух или более таких элементов. Другие комбинации и подкомбинации раскрытых признаков, функций, элементов и/или свойств могут быть заявлены формулой изобретения посредством изменения настоящей формулы изобретения или представления новой формулы изобретения в этой или родственной заявке. Такая формула изобретения, более широкая, более узкая, равная или отличная по объему по отношению к исходной формуле изобретения, также рассматривается в качестве включенной в предмет настоящего изобретения.
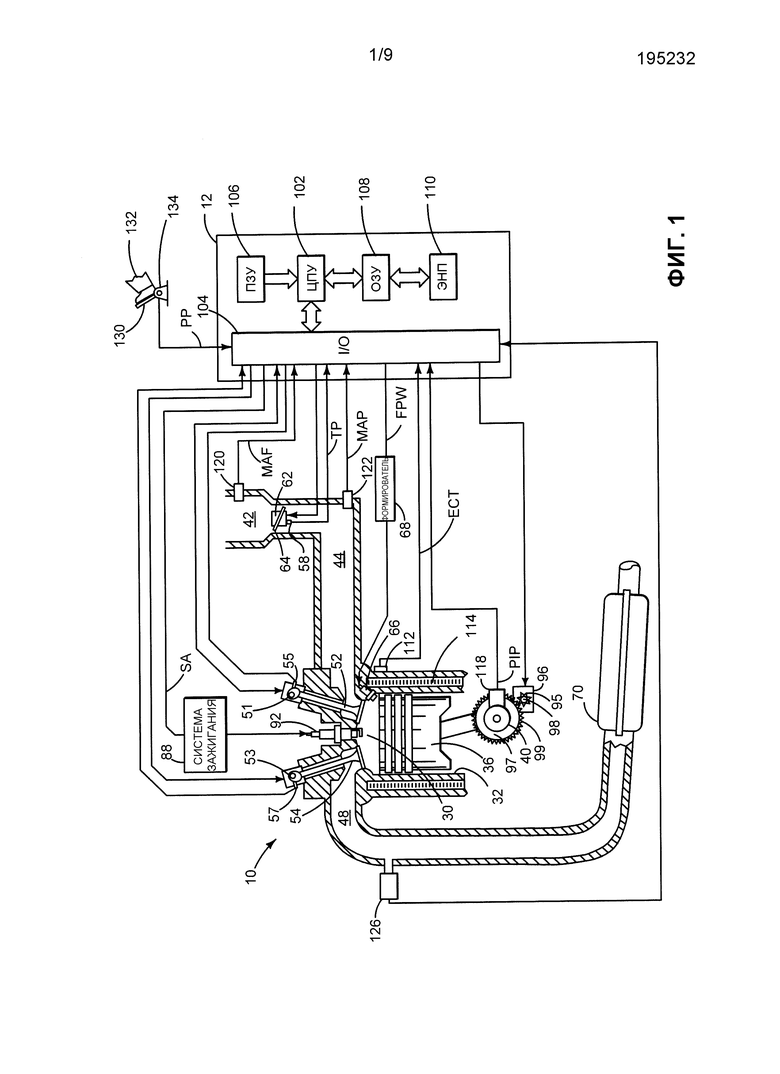
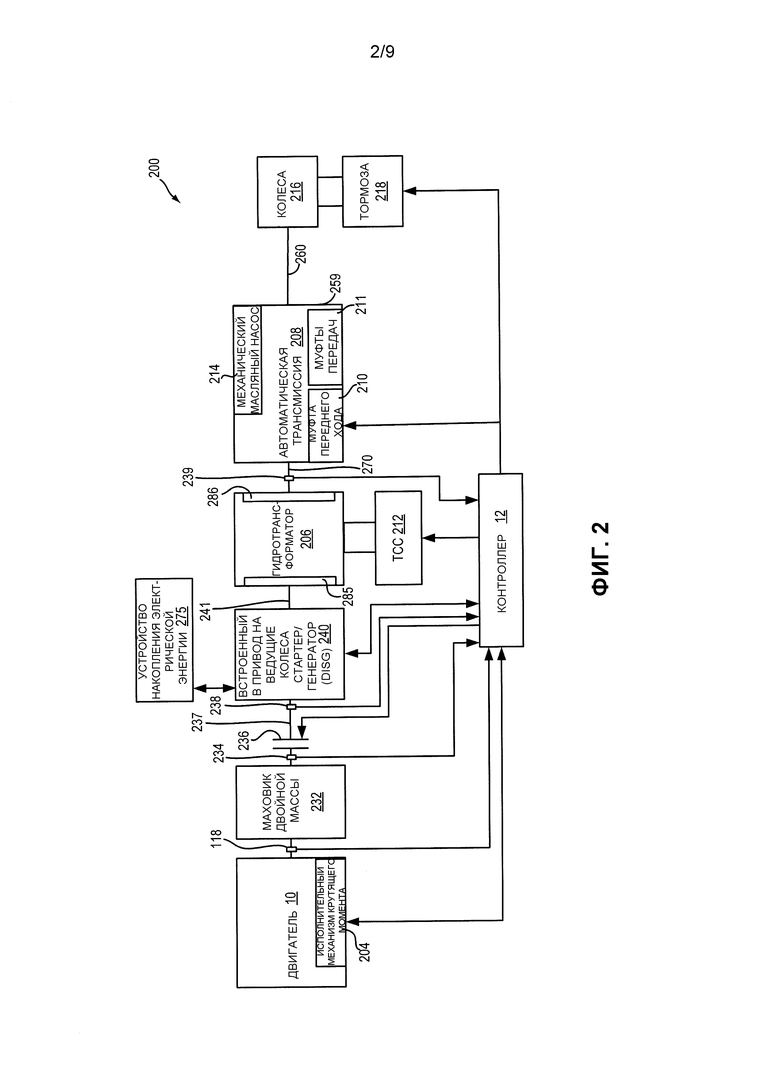
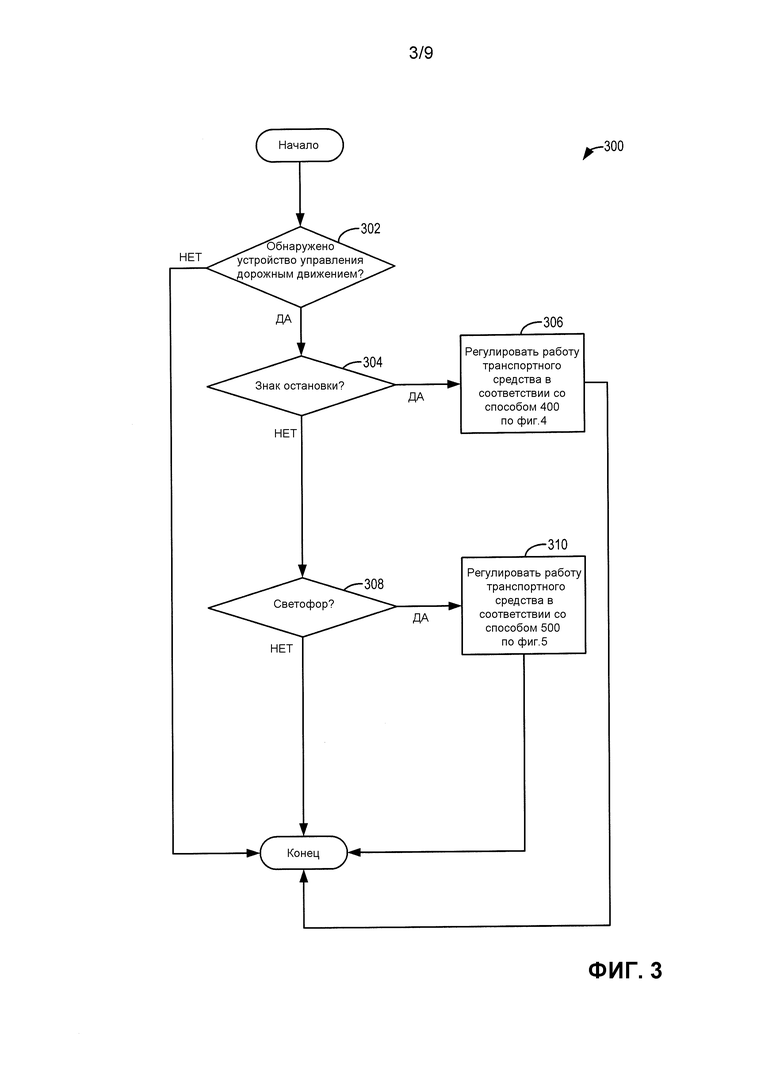
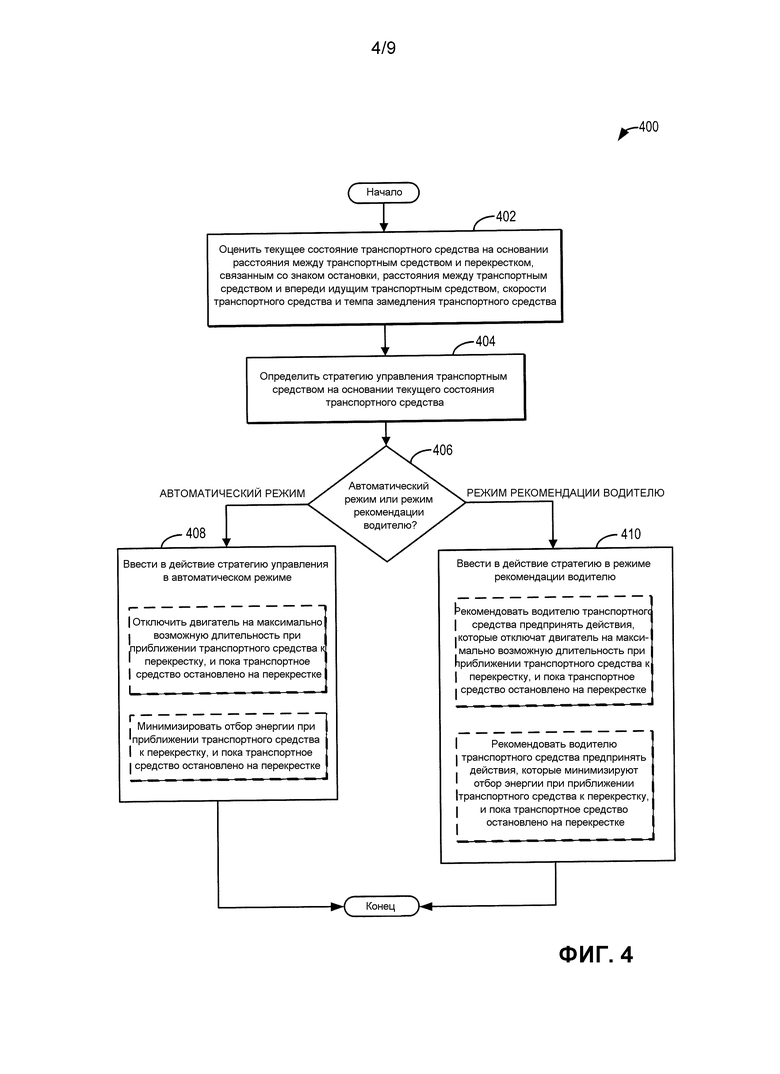

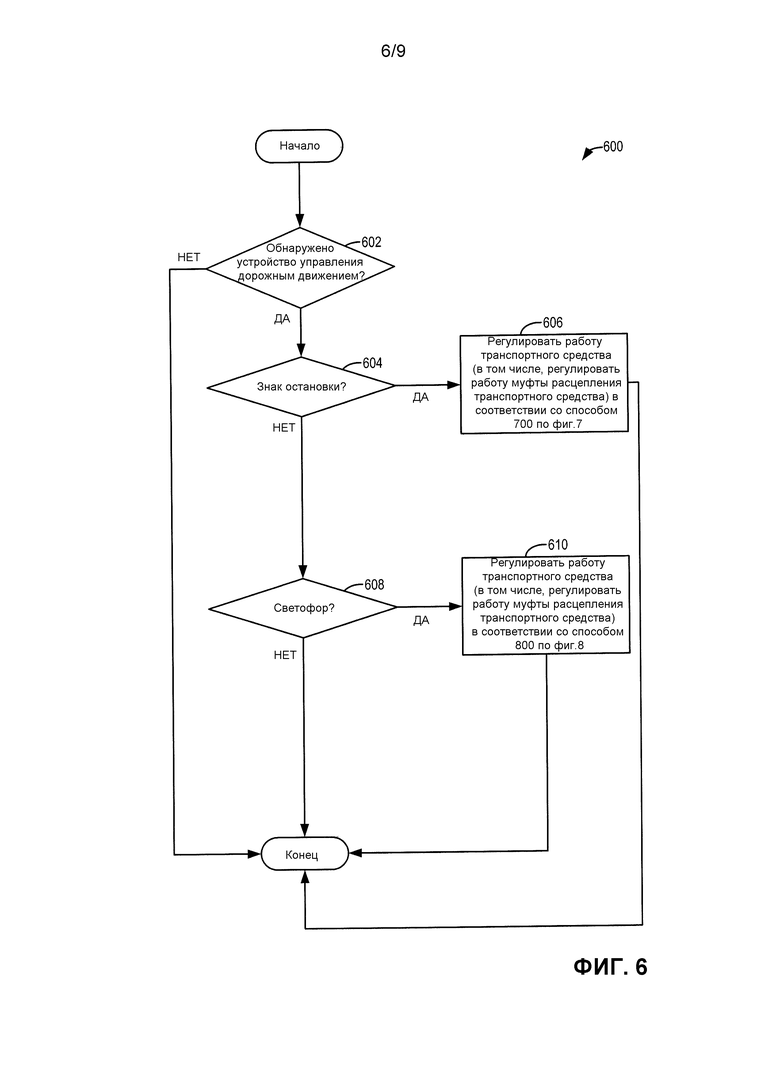
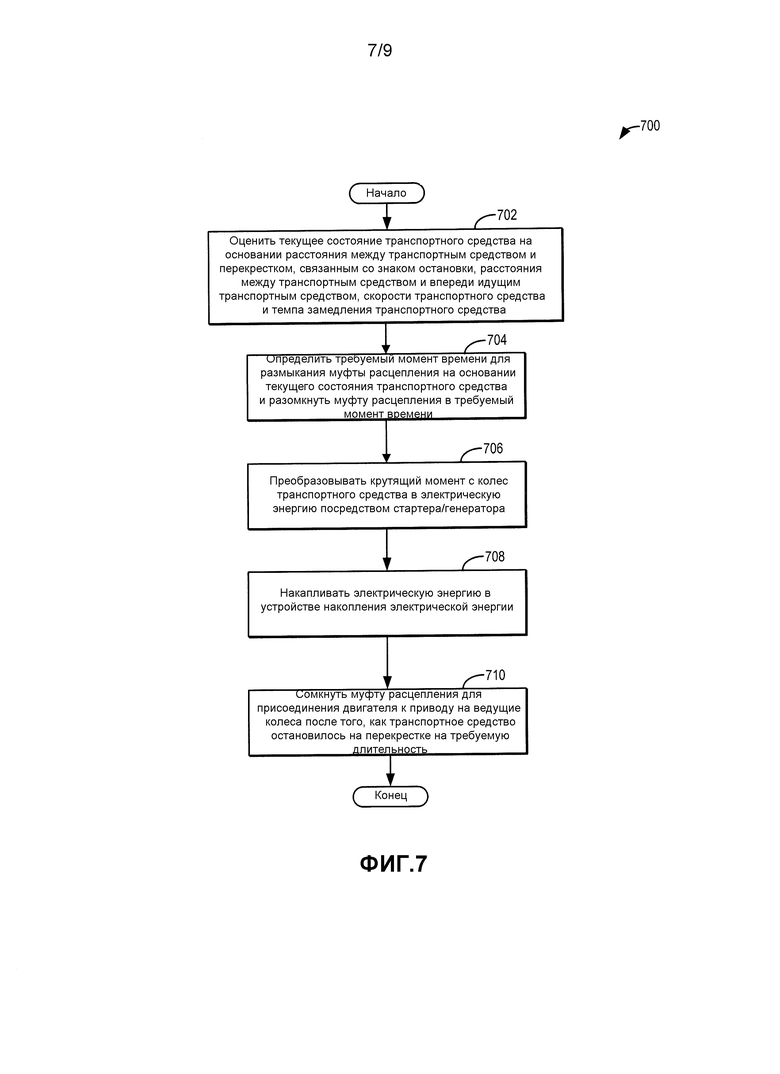
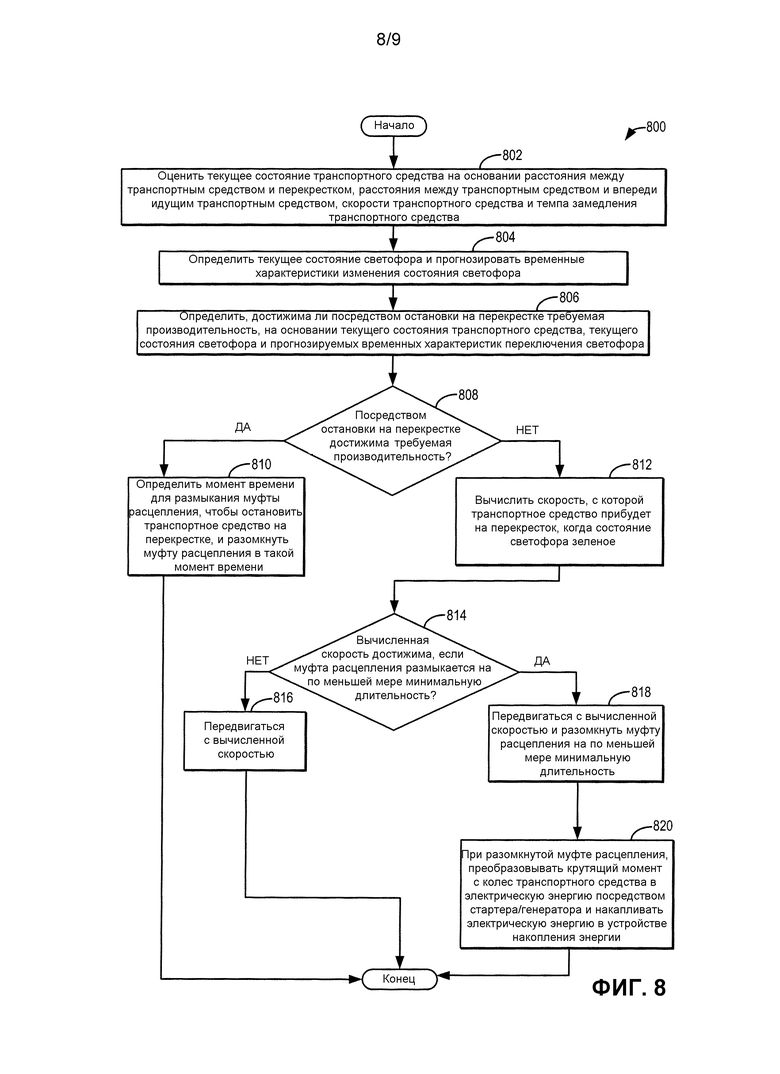
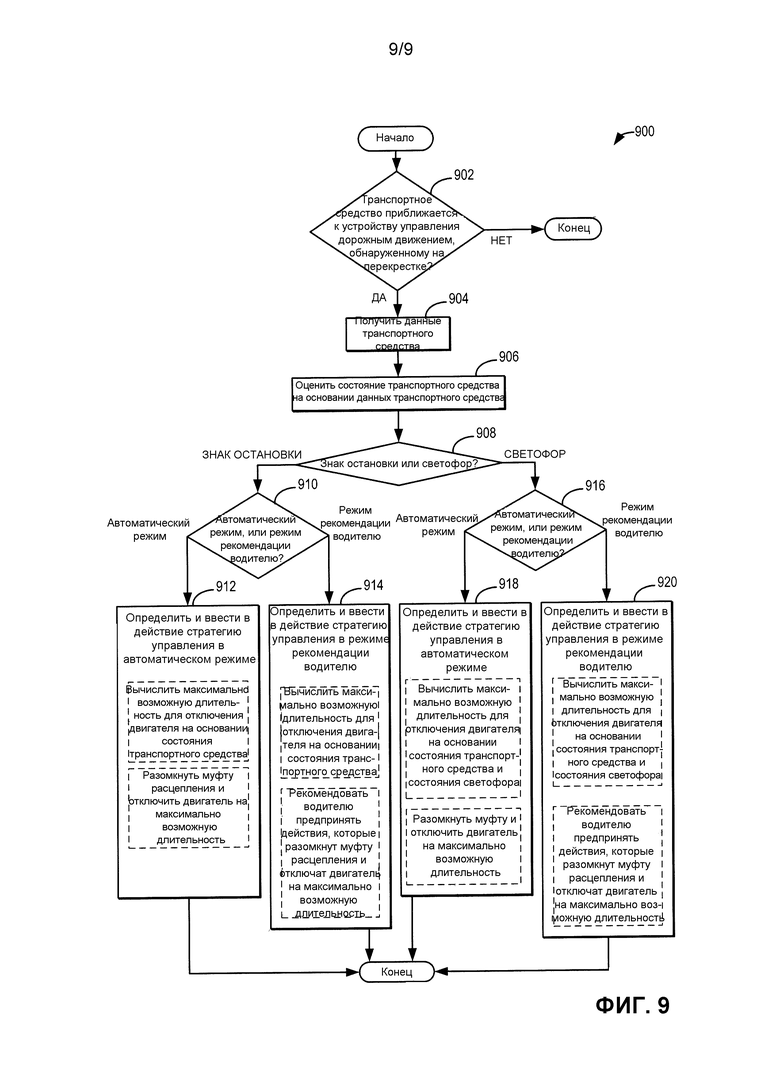
Изобретение относится к способам эксплуатации транспортного средства при его приближении к перекрестку, на котором находится устройство управления дорожным движением. Варианты способа включают в себя этапы, на которых обнаруживают устройство управления дорожным движением на перекрестке, к которому приближается транспортное средство, и размыкают и смыкают муфту расцепления, расположенную в приводе на ведущие колеса транспортного средства между двигателем и стартером/генератором, на основании типа обнаруженного устройства управления дорожным движением. Так как размыкание муфты расцепления включает в себя этап, на котором отсоединяют двигатель от привода на ведущие колеса транспортного средства, двигатель может отключаться для повышения эффективности использования топлива при разомкнутой муфте расцепления. Достигается повышение безопасности эксплуатации транспортного средства и эффективности использования топлива. 3 н. и 11 з.п. ф-лы, 9 ил.
1. Способ эксплуатации транспортного средства, включающий в себя этапы, на которых:
определяют посредством контроллера тип обнаруженного устройства управления дорожным движением;
если обнаруженное устройство управления дорожным движением является светофором:
определяют посредством контроллера, является ли вычисленная скорость для прибытия на перекресток, когда состояние светофора является зеленым, достижимой, если муфта расцепления транспортного средства для отсоединения двигателя транспортного средства от привода на ведущие колеса транспортного средства разомкнута в течение минимальной длительности, и если так, то осуществляют передвижение с вычисленной скоростью и размыкают муфту расцепления в течение по меньшей мере минимальной длительности, и при разомкнутой муфте преобразуют крутящий момент с колес транспортного средства в электрическую энергию посредством стартера/генератора для накопления в устройстве накопления;
если обнаруженное устройство управления дорожным движением является знаком остановки:
оценивают текущее состояние транспортного средства посредством контроллера, основанное на расстоянии между транспортным средством и перекрестком, связанным со знаком остановки, расстоянии между транспортным средством и впереди идущим транспортным средством, скорости транспортного средства и темпе замедления транспортного средства;
иначе осуществляют передвижение с вычисленной скоростью и не размыкают муфту расцепления.
2. Способ по п. 1, дополнительно включающий в себя этап, на котором, если устройство дорожного движения является знаком остановки, размыкают муфту расцепления на максимально возможную длительность посредством контроллера, причем максимально возможная длительность основана на текущем состоянии транспортного средства.
3. Способ по п. 1, дополнительно включающий в себя этап, на котором, если устройство дорожного движения является знаком остановки, регулируют работу транспортного средства посредством контроллера для минимизации отбора энергии при приближении транспортного средства к перекрестку и пока транспортное средство остановлено на перекрестке.
4. Способ по п. 1, дополнительно включающий в себя этап, на котором определяют посредством контроллера текущее состояние транспортного средства, основанное на расстоянии между транспортным средством и перекрестком, расстоянии между транспортным средством и впереди идущим транспортным средством, скорости транспортного средства и темпе замедления транспортного средства.
5. Способ по п. 1, в котором вычисленная скорость для прибытия на перекресток, когда состояние светофора является зеленым, основана на текущем состоянии транспортного средства, текущем состоянии светофора и прогнозируемой временной характеристике изменения состояния светофора, при этом текущее состояние транспортного средства основано на расстоянии между транспортным средством и перекрестком, связанным со светофором, расстоянии между транспортным средством и впереди идущим транспортным средством, скорости транспортного средства и темпе замедления транспортного средства.
6. Способ эксплуатации транспортного средства, включающий в себя этапы, на которых:
обнаруживают посредством контроллера транспортного средства устройство управления дорожным движением на перекрестке, к которому приближается транспортное средство;
если обнаруженное устройство управления дорожным движением является знаком остановки, определяют посредством контроллера требуемое время для размыкания муфты расцепления, расположенной в приводе на ведущие колеса транспортного средства, и размыкают муфту расцепления в требуемый момент времени; и
если обнаруженное устройство управления дорожным движением является светофором, определяют посредством контроллера, достигнута ли посредством остановки на перекрестке требуемая производительность транспортного средства;
если посредством остановки на перекрестке достигнута требуемая производительность транспортного средства, определяют момент времени для размыкания муфты расцепления, чтобы останавливать транспортное средство на перекрестке, и размыкают муфту расцепления в такой момент времени;
иначе вычисляют скорость, с которой транспортное средство прибудет на перекресток, когда состояние светофора является зеленым; и
осуществляют передвижение с вычисленной скоростью.
7. Способ по п. 6, в котором размыкание муфты расцепления включает в себя отсоединение двигателя транспортного средства от привода на ведущие колеса, а смыкание муфты расцепления включает в себя присоединение двигателя к приводу на ведущие колеса.
8. Способ по п. 6, дополнительно включающий в себя этап, на котором, если обнаруженное устройство управления дорожным движением является знаком остановки, определяют требуемое время для размыкания муфты расцепления посредством контроллера на основании текущего состояния транспортного средства, при этом текущее состояние транспортного средства основано на расстоянии между транспортным средством и перекрестком, расстоянии между транспортным средством и впереди идущим транспортным средством, скорости транспортного средства и темпе замедления транспортного средства.
9. Способ по п. 8, дополнительно включающий в себя этапы, на которых, если обнаруженное устройство управления дорожным движением является знаком остановки:
после размыкания муфты расцепления:
преобразуют крутящий момент с колес транспортного средства в электрическую энергию посредством стартера/генератора;
накапливают электрическую энергию в устройстве накопления электрической энергии; и
смыкают муфту расцепления для присоединения двигателя к приводу на ведущие колеса после того, как транспортное средство остановлено на перекрестке на требуемую длительность.
10. Способ по п. 7, дополнительно включающий в себя этапы, на которых, если обнаруженное устройство управления дорожным движением является светофором:
оценивают текущее состояние транспортного средства посредством контроллера, причем текущее состояние транспортного средства основано на расстоянии между транспортным средством и перекрестком, расстоянии между транспортным средством и впереди идущим транспортным средством, скорости транспортного средства и темпе замедления транспортного средства;
определяют текущее состояние светофора;
прогнозируют временную характеристику изменения состояния светофора;
причем определение, достигнута ли посредством остановки на перекрестке требуемая производительность транспортного средства, основано на текущем состоянии транспортного средства, текущем состоянии светофора и прогнозируемой временной характеристике изменения состояния светофора.
11. Способ по п. 6, дополнительно включающий в себя этап, на котором определяют, может ли быть достигнута вычисленная скорость, если муфта расцепления разомкнута в течение по меньшей мере минимальной длительности, и если так, то размыкают муфту расцепления на по меньшей мере минимальную длительность.
12. Способ по п. 11, дополнительно включающий в себя этап, на котором:
при разомкнутой муфте расцепления:
преобразуют крутящий момент с колес транспортного средства в электрическую энергию посредством стартера/генератора; и
накапливают электрическую энергию в устройстве накопления электрической энергии.
13. Способ эксплуатации транспортного средства, включающий в себя этапы, на которых:
обнаруживают устройство управления дорожным движением на перекрестке, к которому приближается транспортное средство посредством контроллера транспортного средства;
получают данные транспортного средства посредством контроллера;
оценивают состояние транспортного средства на основании данных транспортного средства посредством контроллера;
если устройство управления дорожным движением является знаком остановки, вычисляют посредством контроллера максимально возможную длительность для отключения двигателя транспортного средства на основании состояния транспортного средства;
если устройство управления дорожным движением является светофором, вычисляют посредством контроллера требуемую длительность для отключения двигателя на основании состояния транспортного средства и состояния светофора;
отключают двигатель посредством контроллера и размыкают муфту расцепления для отсоединения двигателя от привода на ведущие колеса транспортного средства;
при отсоединенном от двигателя приводе на ведущие колеса транспортного средства преобразуют крутящий момент с колес транспортного средства в электрическую энергию посредством стартера/генератора и накапливают электрическую энергию в устройстве накопления электрической энергии, а затем
смыкают муфту расцепления для присоединения двигателя к приводу на ведущие колеса после того, как транспортное средство остановлено на перекрестке на максимально возможную длительность.
14. Способ по п. 13, дополнительно включающий в себя этап, на котором выбирают автоматический режим или режим рекомендации водителю водителем транспортного средства и выбирают один или более из режима безопасности и режима эффективности использования топлива водителем транспортного средства.
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |

