Изобретение касается устройства для самотормозящегося двунаправленного привода медицинского терапевтического устройства, имеющего внутреннюю часть, обладающую возможностью вращения вокруг оси вращения, наружную часть, зафиксированную от вращения, снабженную круглым отверстием, которое окружает внутреннюю часть и расположено концентрически вокруг оси вращения, вращающийся вокруг оси вращения приводной вал, который может соединяться с внутренней частью и с терапевтическим устройством, и элемент привода для вращения внутренней части вместе с приводным валом. Кроме того, устройство включает в себя первый зажимной элемент и второй зажимной элемент, которые установлены в промежуточном пространстве между внутренней частью и наружной частью.
При лечении пациентов часто требуется, чтобы части пациента, в частности конечности, должны были фиксироваться и перемещаться целенаправленно. В частности, при операциях, при которых положение части тела должно многократно целенаправленно изменяться, требуются регулируемые терапевтические устройства. Так, нога пациента при процедуре протезирования бедра путем «direct interior approach» (англ. прямой внутренний метод), а также при «total hip arthoplasty» (англ. полная артопластика бедра) должна неоднократно вращаться. При этом нога пациента свободнолежащим образом прямо зажата в тракционном или, соответственно, вытяжном узле. Такие тракционные или, соответственно, вытяжные узлы применительно к операционным столам называются также экстензионными устройствами. При этом угол вращения ноги должен многократно изменяться соответственно хирургической последовательности выполняемых действий и медицинским необходимостям. Максимальный обычный диапазон вращения составляет 180°.
Для изменения угла вращения ноги пациента, зажатой в экстензионном устройстве, оператор должен повернуть зажимной винт для деблокировки вращения, так чтобы было деблокировано вращение ноги пациента экстензионным устройством. Затем хирург вращает ногу пациента в желаемое положение. При этом мысок стопы пациента может использоваться в качестве индикатора угла вращения. Тогда нога пациента должна вручную удерживаться с желаемым углом вращения, при этом вследствие анатомической структуры ноги возникает возвратная сила под углом, отличающимся от желаемого угла вращения. Затем зажимной винт затягивается, так чтобы нога пациента фиксировалась экстензионным устройством с желаемым углом вращения. Чтоб вернуть ногу пациента в прежнее положение или ориентировать под другим углом вращения, зажимной винт должен снова отвертываться, нога пациента снова контролируемым образом вращаться обратно или в желаемое положение. Затем зажимной винт снова фиксируется.
В зависимости от хирургической последовательности выполняемых действий, во время операции эта процедура должна многократно повторяться. В поясненном процессе действия ослабление/затягивание зажимного винта и вращение/удерживание ноги пациента в желаемом положении иногда должны выполняться одновременно. При этом стремление ноги пациента вернуться в определенное положение часто создает трудности и приводит к значительной нагрузке на хирурга, так как нужны значительная сила и концентрация для координации требуемых рабочих шагов. Поэтому высокоточное позиционирование ноги пациента во время операции возможно только ограниченным образом, так что из-за этого существует риск для пациента в процессе операции. Для ограничения этого риска обычно один человек отвертывает зажимной винт, а второй человек приводит ногу пациента в желаемое положение и держит там, пока не будет снова зафиксирован зажимной винт. При наличии двух человек связанные с этим затраты относительно высоки.
Задачей изобретения является предложить устройство, с помощью которого может просто и надежно изменяться положение медицинского терапевтического устройства.
Эта задача решается с помощью устройства для самотормозящегося двунаправленного привода медицинского терапевтического устройства с признаками п.1 формулы изобретения. Предпочтительные усовершенствования изобретения указаны в зависимых пунктах формулы изобретения.
С помощью блокирующих узлов для блокировки вращения внутренней части, действующих в противоположных направлениях вращения, предотвращается вращение приводного вала и вместе с тем также вращение терапевтического устройства, соединенного с приводным валом, такого как устройство для помещения стопы для помещения стопы ноги пациента, когда прикладывается вращающий момент на выходе. Вращение внутренней части и вместе с тем приводного вала с помощью предлагаемого изобретением устройства для самотормозящегося двунаправленного привода медицинского терапевтического устройства возможно только с помощью элемента привода, так как он перемещает первый деблокирующий элемент для деблокировки первого направления вращения, а также второй деблокирующий элемент для деблокировки второго направления вращения. Благодаря этому вращение приводного вала и вместе с тем перестановка медицинского терапевтического устройства легко возможно путем задействования элемента привода, вследствие чего легко возможно простое обращение с медицинским терапевтическим устройством, в частности, обслуживание только одним человеком. В частности, можно обойтись без отдельно задействуемых зажимных или фиксирующих элементов, так как фиксация обеспечена автоматически посредством блокирующих узлов, действующих в противоположных направлениях вращения. Также с помощью элемента привода легко возможно точное вращение приводного вала, так что могут легко устанавливаться желаемые угловые положения приводного вала и обслуживающего устройства, соединенного с приводным валом.
Особенно предпочтительно, если дополнительно предусмотрен привод с вращающимся ходовым винтом, с помощью которого медицинское терапевтическое устройство может смещаться в направлении оси вращения или параллельно оси вращения. Благодаря этому медицинское терапевтическое устройство может смещаться по оси вращения или, соответственно, в продольном направлении параллельно оси вращения, и дополнительно с помощью элемента привода может точно устанавливаться угол вращения терапевтического устройства, чтобы, например, воздействовать на ногу пациента с вытягивающей силой. Вращающийся ходовой винт привода с вращающимся ходовым винтом предпочтительно продет посредине через приводной вал, при этом вращающийся ходовой винт установлен с возможностью свободного вращения относительно приводного вала.
Особенно предпочтительно, если элемент привода при вращении в первом направлении вращения сначала перемещает первый деблокирующий элемент из первого нейтрального положения в первое деблокированное положение, в котором этот первый деблокирующий элемент препятствует блокировке вращения внутренней части в первом направлении вращения первым блокирующим узлом, и при дальнейшем вращении вращает внутреннюю часть в первом направлении вращения. Кроме того, элемент привода при вращении во втором направлении вращения сначала перемещает второй деблокирующий элемент из второго нейтрального положения во второе деблокированное положение, в котором второй деблокирующий элемент препятствует блокировке вращения внутренней части во втором направлении вращения вторым блокирующим узлом, и при дальнейшем вращении во втором направлении вращения вращает внутреннюю часть во втором направлении вращения. Таким образом, при вращении элемента привода в первом направлении вращения сначала происходит деблокировка вращения внутренней части в первом направлении вращения или, соответственно, прекращение блокировки вращения внутренней части в первом направлении вращения, а затем вращение внутренней части и приводного вала, соединенного с внутренней частью. Таким же образом при вращении элемента привода во втором направлении вращения сначала происходит деблокировка вращения внутренней части во втором направлении вращения, а при дальнейшем вращательном движении элемента привода во втором направлении вращения вращение внутренней части во втором направлении вращения. Предпочтительно первый деблокирующий элемент и второй деблокирующий элемент из первого деблокированного положения или, соответственно, второго деблокированного положения автоматически движутся обратно в первое или, соответственно, втрое нейтральное положение, предпочтительно силой упругости из соответствующего деблокированного положения в нейтральное положение. Благодаря этому возможно простое обращение с устройством без переключения желаемого направления вращения или разблокирования.
Кроме того, предпочтительно, если первый зажимной элемент при вращении внутренней части в первом направлении вращения может зажиматься в первой зажимной области, образованной между наружной частью и внутренней частью, и если второй зажимной элемент при вращении внутренней части во втором направлении вращения может зажиматься во второй зажимной области, образованной между наружной частью и внутренней частью. Зажатие первого зажимного элемента в первой зажимной области или, соответственно, второго зажимного элемента во второй зажимной области происходит только тогда, когда первый деблокирующий элемент или, соответственно, второй деблокирующий элемент не находятся в их деблокированном положении. Путем зажатия зажимных элементов во второй зажимной области гарантируется, что блокировка вращательного движения в первом направлении вращения и втором направлении вращения происходит только тогда, когда деблокирующие элементы не были передвинуты с помощью узла привода в их деблокированное положение. При этом просто и эффективно предотвращается вращение приводного вала посредством медицинского терапевтического устройства без необходимости для этого определенных манипуляций оператора, таких как фиксация зажимных винтов или тому подобное. Такие зажимные системы, имеющие зажимные элементы, которые установлены между наружной частью и внутренней частью и которые зажимаются в зажимной области, образованной между наружной частью и внутренней частью, известны, например, по так называемым обгонным муфтам с зажимными элементами, которые обеспечивают возможность свободного вращения внутренней части относительно наружной части в первом направлении вращения, и которые создают соединение между внутренней и наружной частью при вращениях в противоположном направлении вращения.
Путем зажатия зажимных элементов в соответствующей зажимной области получена простая и практически не требующая технического обслуживания система, которая надежно препятствует нежелательному вращению медицинского терапевтического устройства вокруг оси вращения.
Кроме того, предпочтительно, если между первым зажимным элементом и вторым зажимным элементом установлен упруго деформируемый элемент, который вдавливает первый зажимной элемент в первую зажимную область, а второй зажимной элемент во вторую зажимную область. Благодаря этому зажимные элементы надежно установлены в соответствующей зажимной области, так что возможна блокировка без зазора вращательного движения, и при этом достигается долговременное точное позиционирование медицинского терапевтического устройства.
Особенно предпочтительно, если упругий элемент представляет собой пружину, предпочтительно спиральную пружину, установленную между зажимными элементами. Альтернативно этот упруго деформируемый элемент может быть образован блоком из эластомера или блоком из полимера. С помощью этих элементов может простым образом гарантироваться, что зажимные элементы будут вдавливаться каждый в свою зажимную область и надежно удерживаться там. Кроме того, каждый зажимной элемент при движении соответствующего деблокирующего элемента в деблокированное положение может выдавливаться из зажимной области против силы упругости, так чтобы движение больше не блокировалось соответствующими зажимными элементами.
Кроме того, предпочтительно, если первый деблокирующий элемент установлен на стороне первого зажимного элемента, повернутой от упруго деформируемого элемента, а второй деблокирующий элемент на стороне второго зажимного элемента, повернутой от упруго деформируемого элемента. Благодаря этому возможна простая и компактная установка зажимных элементов и деблокирующих элементов.
Кроме того, предпочтительно, если первый блокирующий узел и второй блокирующий узел при прикладываемом к приводному валу и/или к внутренней части на выходе вращающем моменте препятствовали вращению внутренней части и приводного вала без задействования элемента привода. Благодаря этому обеспечена возможность более простого и надежного обращения со терапевтическим устройством, так как даже при прикладываемом к внутренней части на выходе вращающем моменте надежно предотвращается вращение внутренней части и приводного вала без приведения в действие элемента привода. Таким образом, возможно более простое и надежное обращение с терапевтическим устройством.
Кроме того, предпочтительно, если устройство обеспечивает возможность вращения приводного вала только путем задействования элемента привода. Тем самым гарантировано, что надежно предотвращено вращение медицинского терапевтического устройства вращающим моментом на выходе, и поэтому возможно надежное обращение с медицинским терапевтическим устройством.
Кроме того, предпочтительно, если элемент привода находится в зацеплении с внутренней частью посредством по меньшей мере одного элемента зацепления, причем этот элемент зацепления помещен в выемку внутренней части с зазором и/или причем этот элемент зацепления помещен в выемку элемента привода с зазором. Этот зазор предпочтительно имеет величину в пределах от 0,5 мм до 5 мм или от 0,01° до 2°.
Конкретно элемент зацепления может быть выполнен в виде штифта, а выемка в виде отверстия, при этом штифт вдается в отверстие, и диаметр отверстия предпочтительно больше, чем диаметр штифта, на величину в пределах от 0,5 мм до 5 мм.
При этом элемент привода предпочтительно непосредственно, т.е. без зазора, соединен с деблокирующими элементами или, соответственно, непосредственно без зазора находится в зацеплении с ними. Благодаря этому может простым образом гарантироваться, что сначала первый деблокирующий элемент будет приводиться в первое деблокированное положение, так что будет устранена блокировка первого блокирующего узла, и что затем будет происходить вращение внутренней части в первом направлении вращения. Таким же образом при вращении узла привода во втором направлении вращения сначала второй деблокирующий элемент движется во второе деблокированное положение, в котором второй деблокирующий элемент препятствует зажатию второго зажимного элемента во второй зажимной области, а затем происходит вращение внутренней части с помощью узла привода во втором направлении вращения. Благодаря этому не требуется ни переключение направления вращения, ни дополнительное арретирование. Должен только осуществляться привод с помощью элемента привода, чтобы деблокировать и выполнить желаемое вращательное движение при манипуляции оператора.
Особенно предпочтительно, если первый деблокирующий элемент и второй деблокирующий элемент находятся в активном соединении с исполнительным элементом, и если этот исполнительный элемент при приведении в действие перемещает первый деблокирующий элемент в первое деблокированное положение, а второй деблокирующий элемент во второе деблокированное положение. Благодаря этому может одновременно, независимо от задействования элемента привода, прекращаться блокировка первым блокирующим узлом и блокировка вторым блокирующим узлом, так что тогда вращение приводного вала и медицинского терапевтического устройства, соединенного с приводным валом, может также осуществляться на выходе. Таким образом, деблокировка вращения происходит путем приведения в действие исполнительного элемента. Благодаря деблокировке вращения медицинское терапевтическое устройство может свободно вращаться, например, для оценки функции и подвижности суставов конечности пациента, соединенной с обслуживающим устройством, например, вращения ноги пациента после вставления бедренного эндопротеза или искусственного коленного сустава.
Кроме того, предпочтительно, если первая блокирующая и деблокирующая система включает в себя по меньшей мере первый блокирующий узел, второй блокирующий узел, первый деблокирующий узел и второй деблокирующий узел, и если устройство включает в себя по меньшей мере одну вторую блокирующую и деблокирующую систему, при этом конструкция и функция этой второй блокирующей и деблокирующей системы совпадают со строением первой блокирующей и деблокирующей системы. Таким образом, вторая блокирующая и деблокирующая система может включать в себя по меньшей мере один третий блокирующий узел, четвертый блокирующий узел, третий деблокирующий узел и четвертый деблокирующий узел. Указанные по меньшей мере две блокирующие и деблокирующие системы установлены на одинаковых угловых расстояниях вокруг оси вращения. Благодаря этому силы, возникающие между наружной частью и внутренней частью для блокировки движения, равномерно распределяются по периметру внутренней части и наружной части, так что силы, действующие на внутреннюю часть со стороны блокирующих и деблокирующих систем ортогонально к оси вращения, в сумме предпочтительно равны нулю. Благодаря этому ни внутренняя часть, ни приводной вал не должны воспринимать поперечные силы со стороны блокирующих и деблокирующих систем, при этом возможна простая и компактная конструкция. Особенно предпочтительно, если устройство включает в себя три блокирующие и деблокирующие системы, конструкция и функция которых совпадают, и которые установлены на одинаковых угловых расстояниях вокруг оси вращения. При этом возможна особенно простая и компактная конструкция.
Особенно предпочтительно, если первая блокирующая и деблокирующая система включает в себя по меньшей мере первый деблокирующий элемент, второй деблокирующий элемент, первый зажимной элемент и второй зажимной элемент, если вторая блокирующая и деблокирующая система включает в себя по меньшей мере третий деблокирующий элемент, четвертый деблокирующий элемент, третий зажимной элемент и четвертый зажимной элемент, если третья блокирующая и деблокирующая система включает в себя по меньшей мере пятый деблокирующий элемент, шестой деблокирующий элемент, пятый зажимной элемент и шестой зажимной элемент, если первый, третий и пятый деблокирующий элемент соединены друг с другом таким образом, что они вместе могут перемещаться вокруг оси вращения, и если второй, четвертый и шестой деблокирующий элемент соединены друг с другом таким образом, что они вместе могут перемещаться вокруг оси вращения. Первый, третий и пятый деблокирующий элементы вместе могут перемещаться относительно второго, четвертого и шестого деблокирующего элемента, предпочтительно на угол в пределах от 0,5° до 5°. Благодаря этому возможно совместное движение первого, третьего и пятого деблокирующего элемента относительно второго, четвертого и шестого деблокирующего элемента, так что такое движение может производиться с помощью исполнительного элемента, благодаря чему все деблокирующие элементы одновременно могут перемещаться в их соответствующее деблокированное положение, и легко предотвращается зажатие соответствующего зажимного элемента в соответствующей зажимной области. Благодаря этому простым образом путем приведения в действие исполнительного элемента может достигаться прекращение блокирующего действия первого блокирующего узла и второго блокирующего узла или, соответственно, соответствующих блокирующих узлов других блокирующих и деблокирующих систем.
Кроме того, предпочтительно, если исполнительный элемент при приведении в действие перемещает первый, третий и пятый деблокирующий элемент вместе в первом направлении вращения, а второй, четвертый и шестой деблокирующий элемент во втором направлении вращения таким образом, что первый деблокирующий элемент контактирует с первым зажимным элементом и препятствует зажатию первого зажимного элемента в первой зажимной области, что второй деблокирующий элемент контактирует со вторым зажимным элементом и препятствует зажатию второго зажимного элемента во второй зажимной области, что третий деблокирующий элемент контактирует с третьим зажимным элементом второй блокирующей и деблокирующей системы и препятствует зажатию третьего зажимного элемента в третьей зажимной области, образованной между внутренней частью и наружной частью, что четвертый деблокирующий элемент контактирует с четвертым зажимным элементом второй блокирующей и деблокирующей системы и препятствует зажатию четвертого зажимного элемента в четвертой зажимной области, образованной между внутренней частью и наружной частью, что пятый деблокирующий элемент контактирует с пятым зажимным элементом третьей блокирующей и деблокирующей системы и препятствует зажатию пятого зажимного элемента в пятой зажимной области, образованной между внутренней частью и наружной частью, и/или что шестой деблокирующий элемент контактирует с шестым зажимным элементом третьей блокирующей и деблокирующей системы и препятствует зажатию шестого зажимного элемента в шестой зажимной области, образованной между внутренней частью и наружной частью. Благодаря этому происходит простая полная деблокировка вращения, так что тогда также возможно вращение за счет вращающего момента на выходе. При этом блокирующее действие соответствующих блокирующих узлов прекращается путем приведения в действие исполнительного элемента. Исполнительный элемент может быть при этом выполнен так, что он пребывает в задействованном состоянии, пока он не будет передвинут оператором из задействованного состояния в незадействованное состояние. Альтернативно исполнительный элемент может перемещаться обратно из задействованного состояния в незадействованное состояние возвратной силой. В этом случае оператор должен был бы держать исполнительный элемент в задействованном состоянии, пока не будет деблокировано вращение приводного вала. Возврат может осуществляться пружиной.
Предпочтительно зажимные элементы выполнены в виде зажимных роликов, продольные оси которых расположены параллельно оси вращения. Поверхность поперечного сечения внутренней части в плоскости, поперечной к оси вращения, является по существу поверхностью равностороннего треугольника.
Элемент привода предпочтительно выполнен в виде маховика, который вращается вокруг оси вращения. Предпочтительно маховик непосредственно соединен с элементами зацепления для приведения в действие деблокирующих элементов и для вращения внутренней части. Альтернативно между маховиком и элементами зацепления может быть предусмотрена ступень передачи, предпочтительно с понижением.
В результате благодаря изобретению хирург может, в частности, с помощью узла привода вращать ногу пациента, соединенную с медицинским терапевтическим устройством, в желаемом направлении, и устанавливать желаемое угловое положение, при этом одновременно автоматически блокирующими узлами предотвращается обратное движение ноги пациента. Блокирующие узлы действуют в противоположном направлении. Обеспечение возможности беспрепятственного вращения медицинского терапевтического устройства путем приведения в действие исполнительного элемента, в частности, обеспечивает возможность функционального контроля при операциях на бедренных суставах, в частности функционального контроля вставленного бедренного эндопротеза. Переключение между вращением, блокированным с помощью блокирующих узлов, и деблокировкой без затруднений возможно путем приведения в действие исполнительного элемента с помощью элемента управления в ходе операции только одним оператором, в частности хирургом.
Благодаря автоматической блокировке обратного движения осуществляется ощутимая разгрузка оператора, в частности хирурга. Кроме того, благодаря этому может повышаться точность позиционирования медицинского терапевтического устройства в желаемом угловом положении. Также легко возможна коррекция угла вращения на небольшие угловые величины путем плавной перестановки и автоматической блокировки вращательного движения. Также благодаря автоматической блокировке вращательного движения блокирующими узлами устраняется риск нежелательных изменений положения медицинского терапевтического устройства. Хирургическая последовательность выполняемых действий при операции или лечении пациента упрощается и ускоряется, так как для регулировки вращений медицинского терапевтического устройства необходимо меньшее количество манипуляций, чем у известных зажимных устройств.
Другие признаки и преимущества изобретения содержатся в последующем описании, которое поясняет изобретение подробнее на примерах осуществления в связи с прилагаемыми фигурами. Показано:
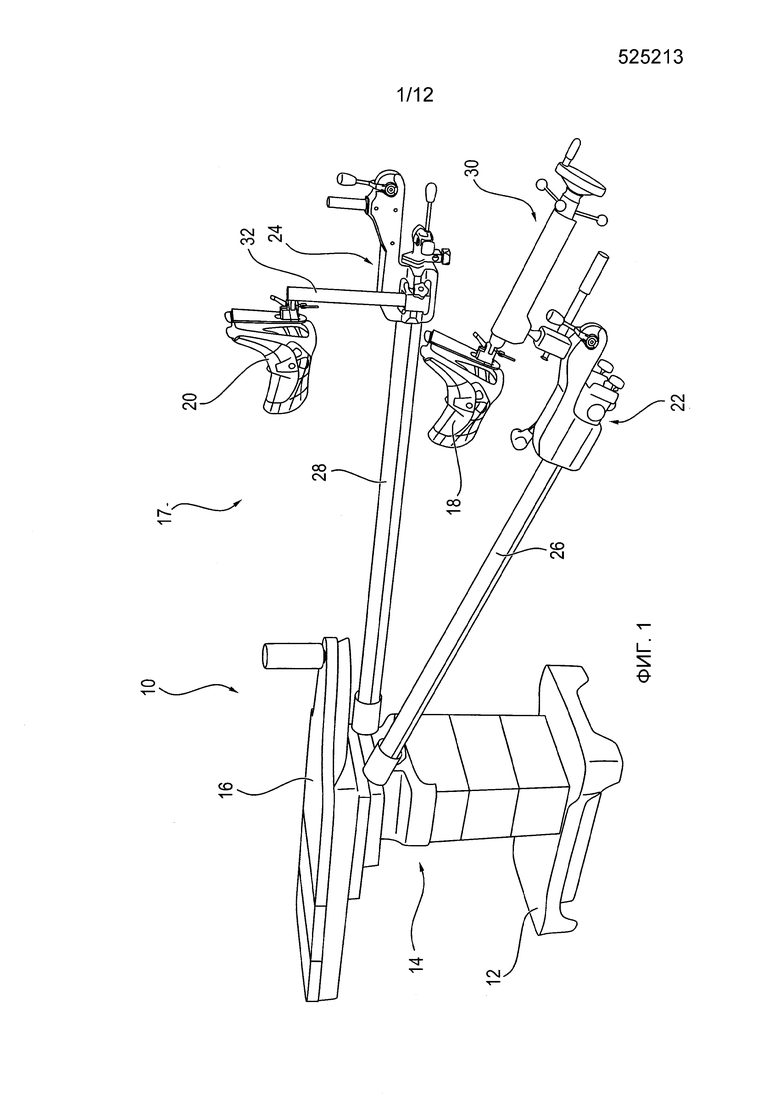
фиг. 1: изображение в перспективе операционного стола, снабженного экстензионной приставкой, для артроскопии бедра и минимально инвазивного протезирования бедра, которая включает в себя регулировочный узел для вращательной и продольной перестановки устройства для помещения стопы;
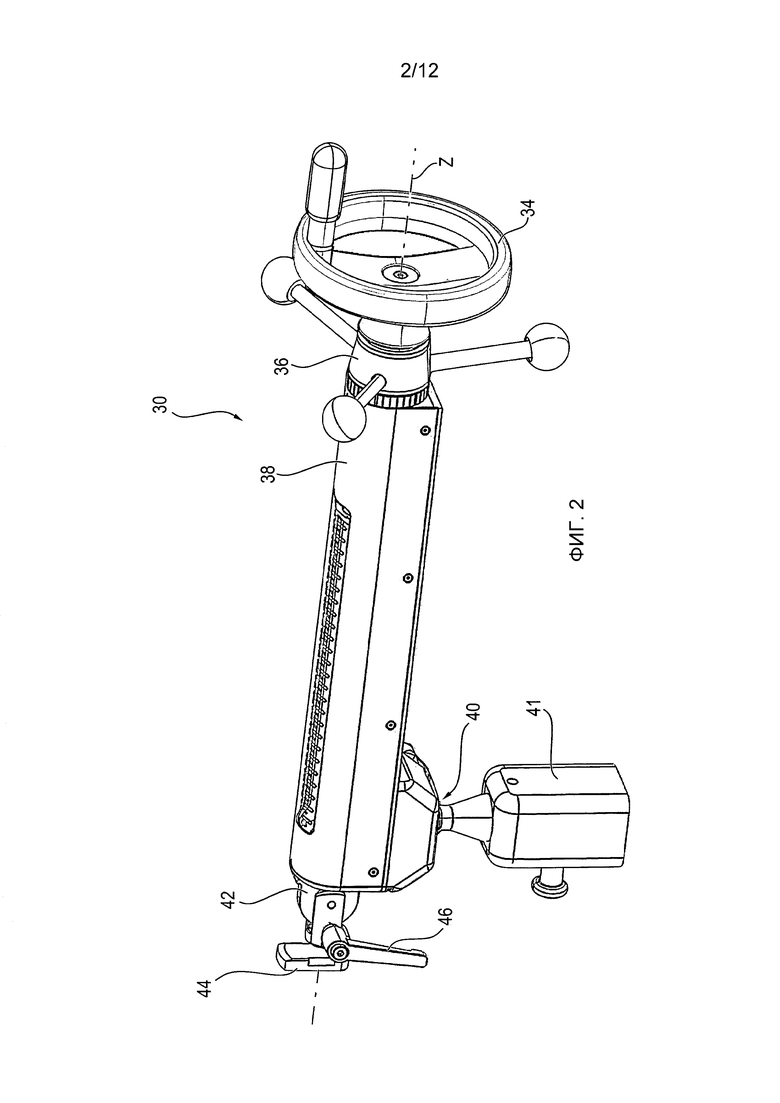
фиг. 2: вид регулировочного узла сбоку в перспективе;
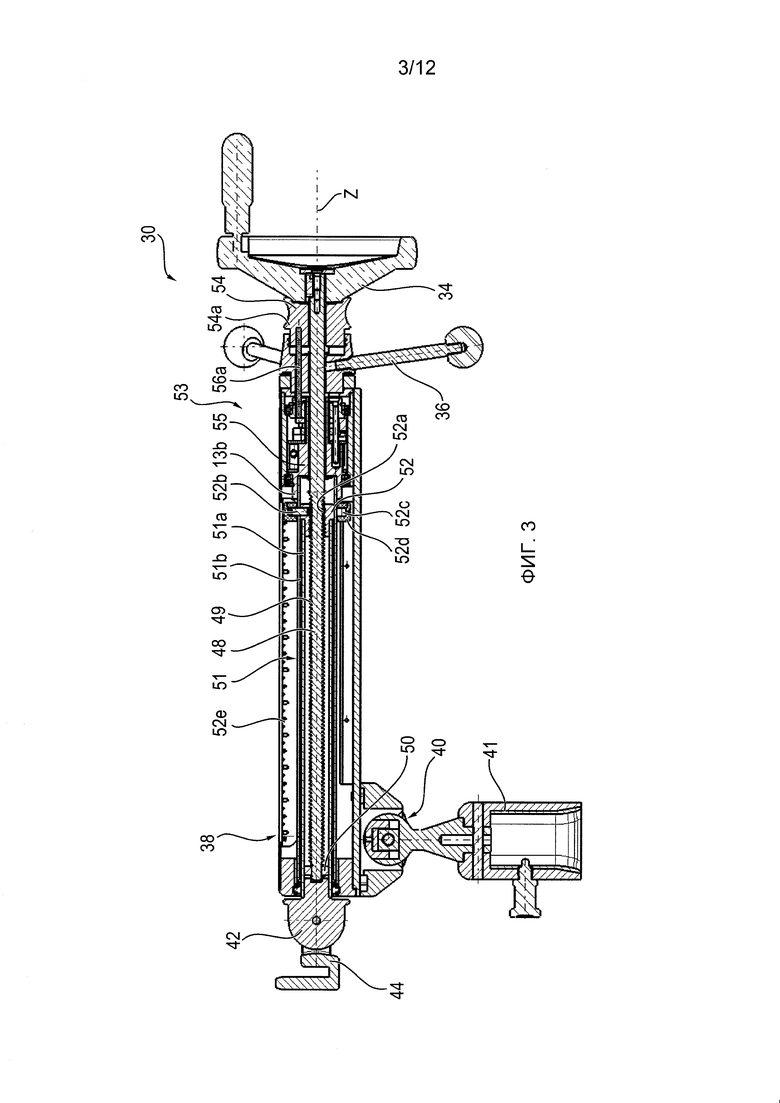
фиг. 3: продольное сечение регулировочного узла;
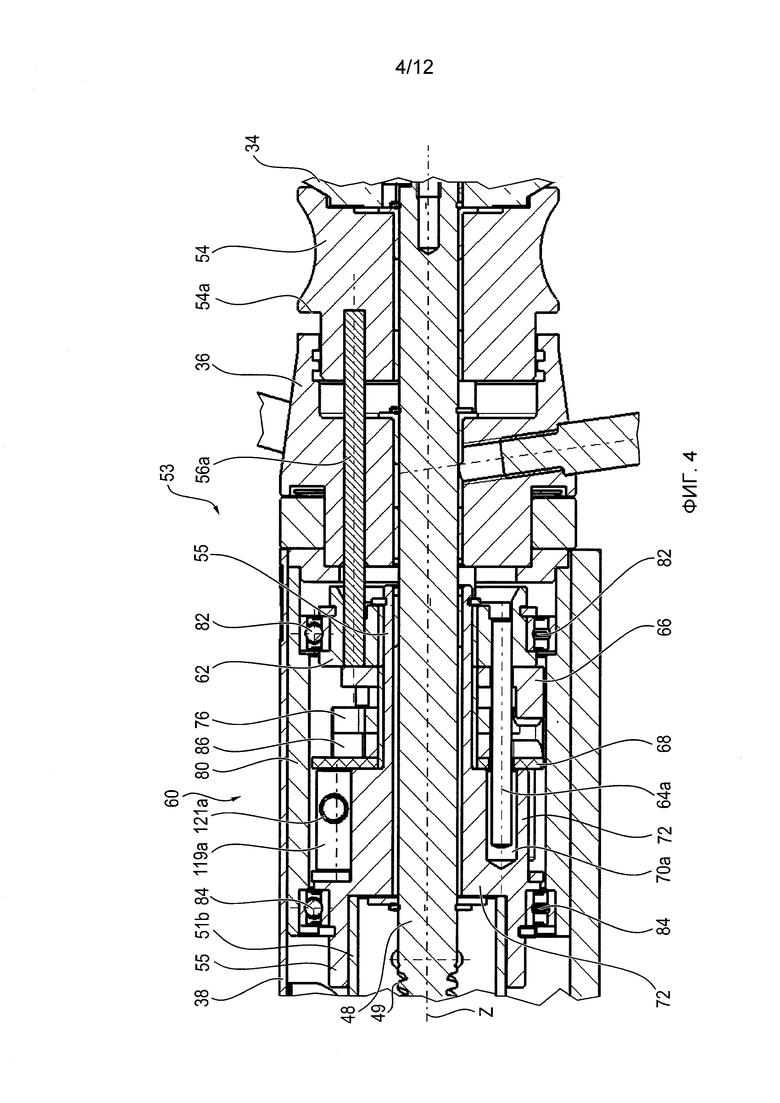
фиг. 4: увеличенное изображение фрагмента продольного сечения в соответствии с фиг. 3, включающего в себя элементы привода вращения;
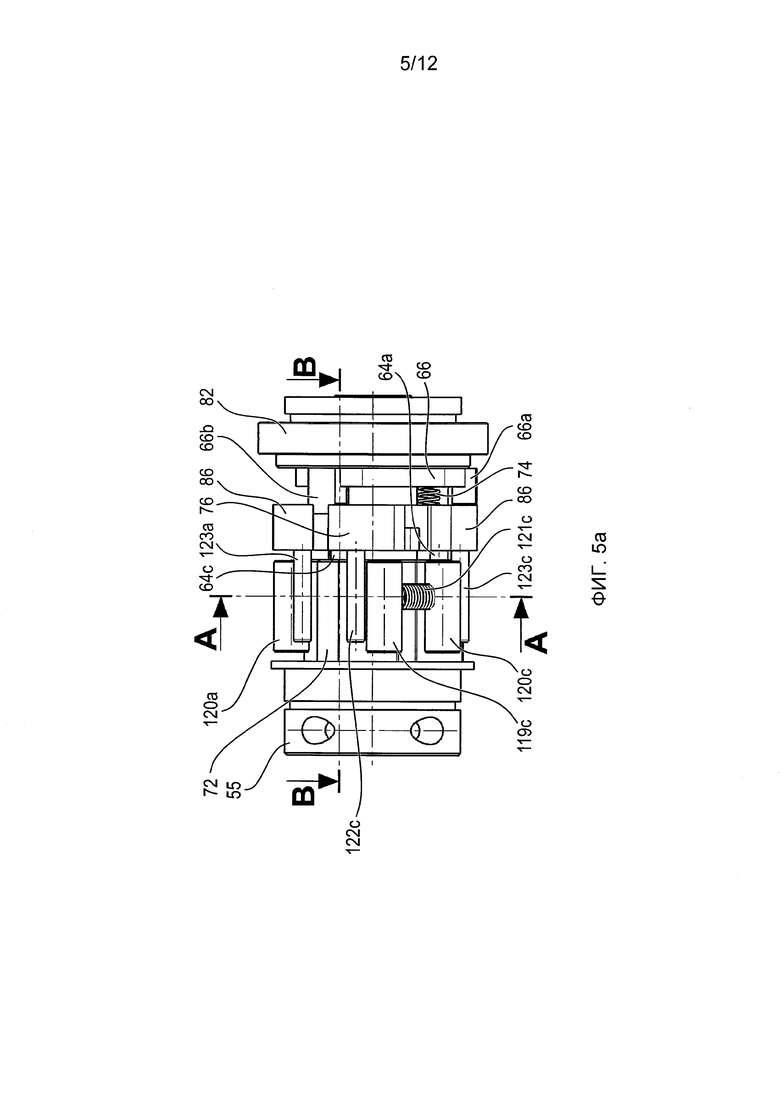
фиг. 5a: вид сбоку системы выбранных элементов блокирующих и деблокирующих узлов привода вращения в соответствии с фиг. 4;
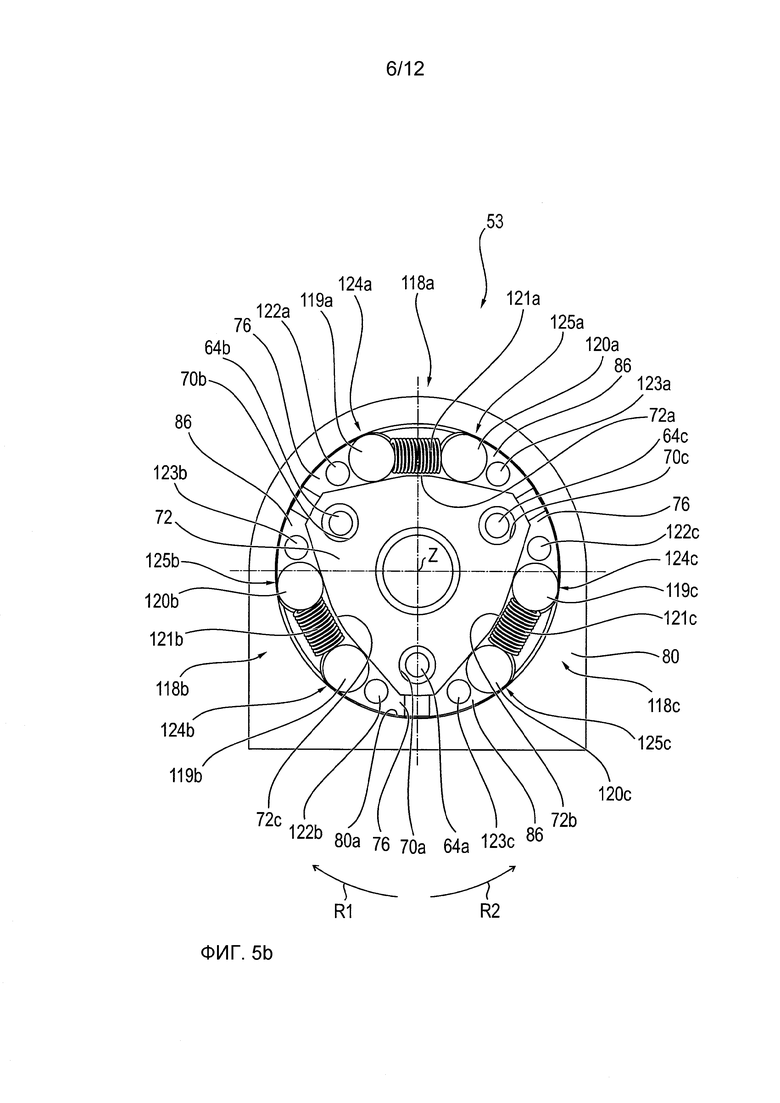
фиг. 5b: изображение сечения системы в соответствии с фиг. 5a по линии сечения A-A, причем дополнительно изображена наружная часть привода вращения;
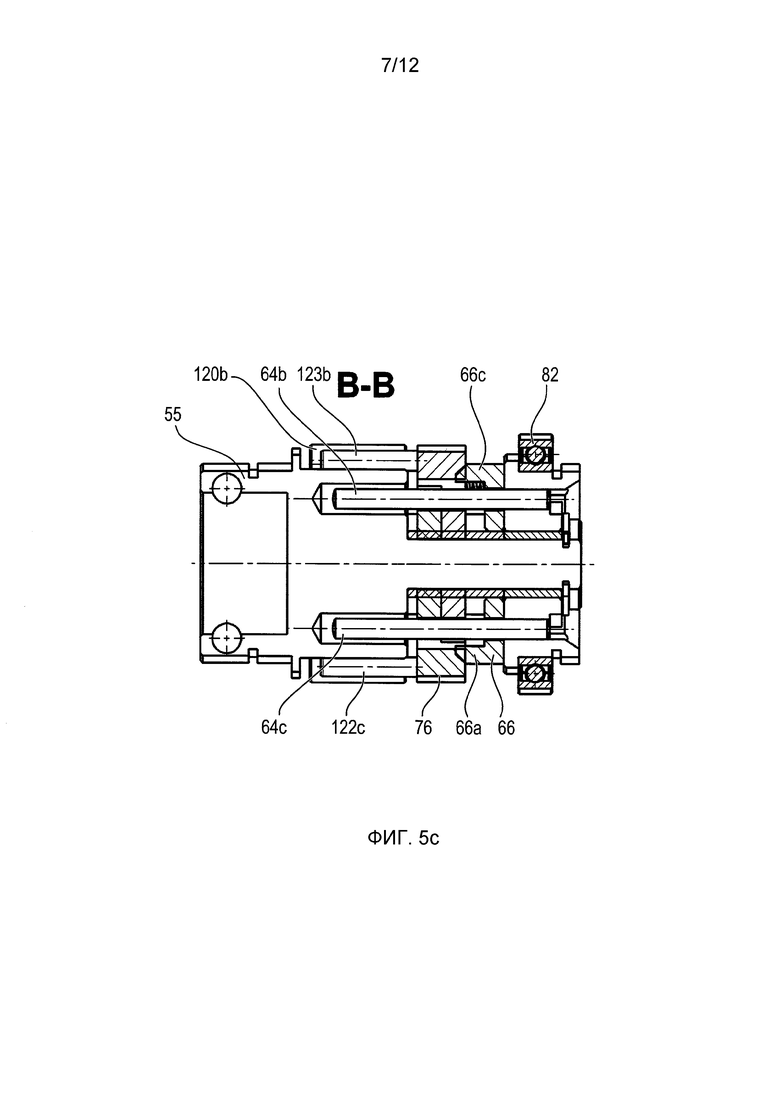
фиг. 5c: изображение сечения системы в соответствии с фиг. 5a по линии сечения B-B;
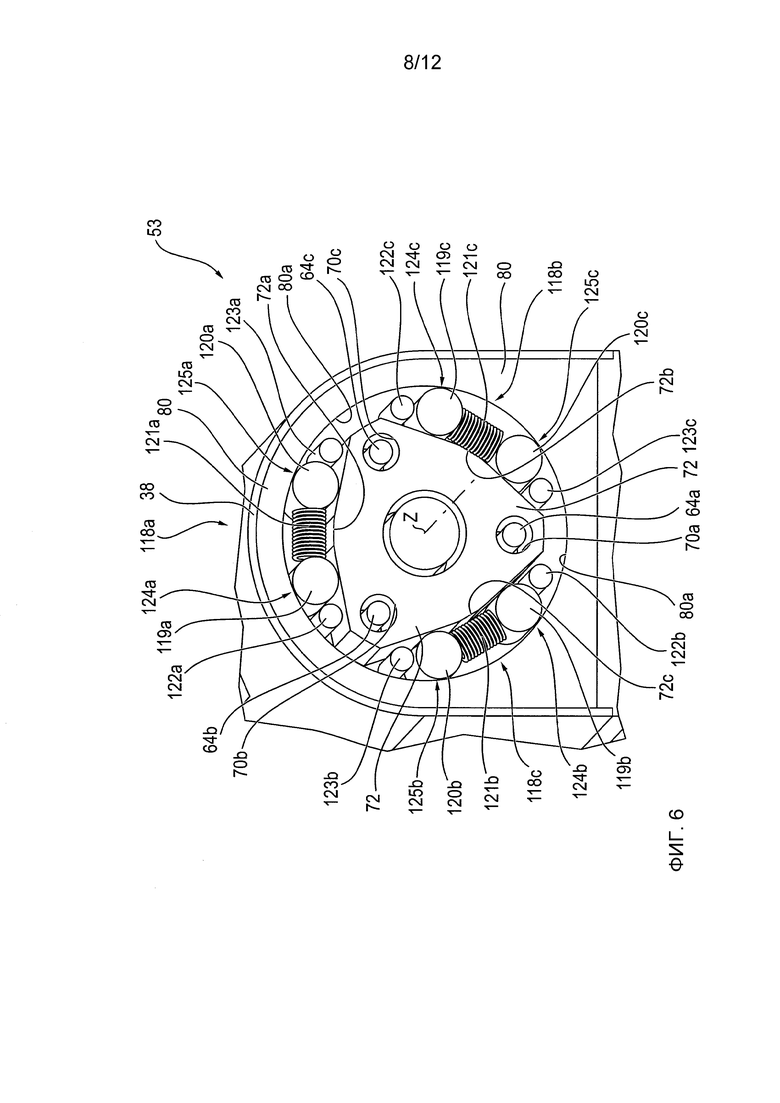
фиг. 6: изображение в перспективе поперечного сечения привода вращения по линии сечения A-A, указанной на фиг. 5a;
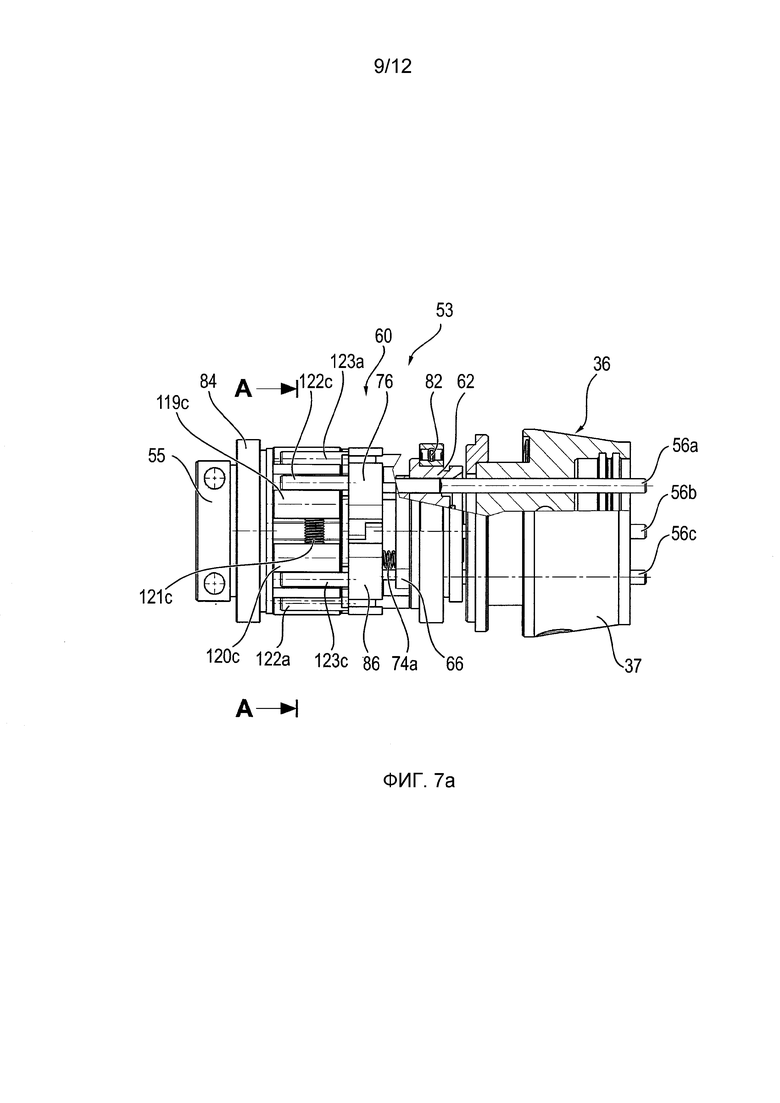
фиг. 7a: другой вид системы элементов привода вращения в частично рассеченном изображении;
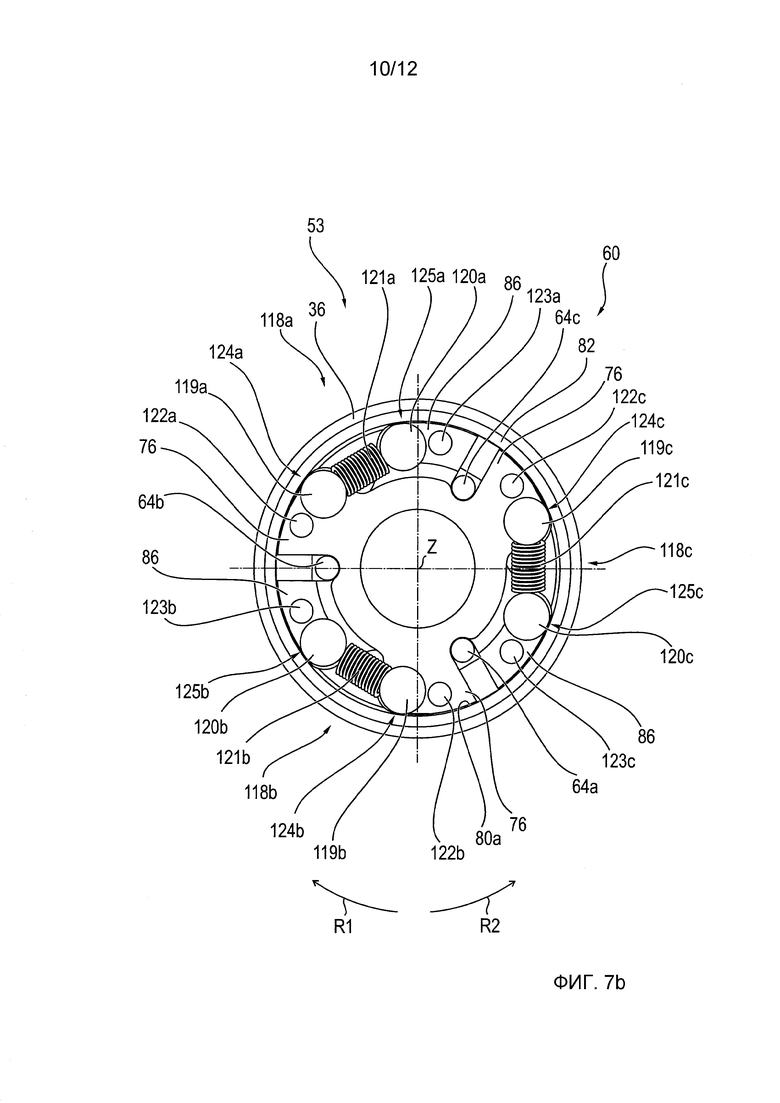
фиг. 7b: поперечное сечение системы в соответствии с фиг. 7a по линии сечения A-A;
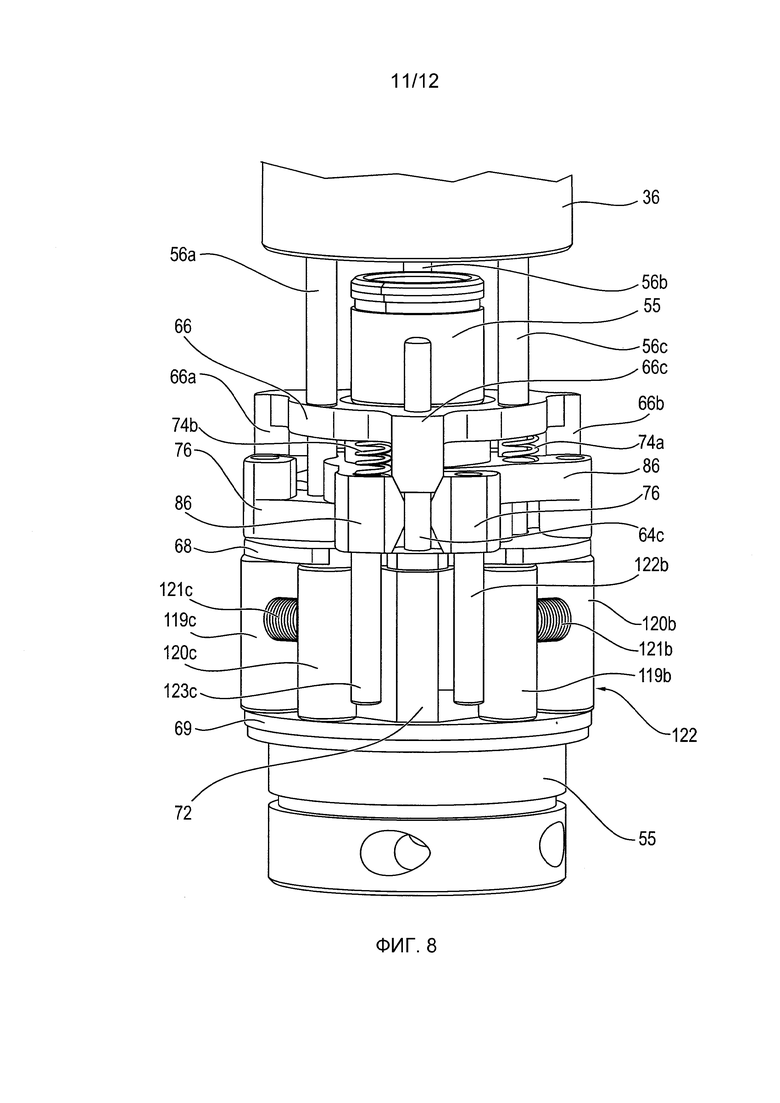
фиг. 8: другой вид в перспективе изображения элементов привода вращения, на котором хорошо видны элементы деблокировки вращения; и
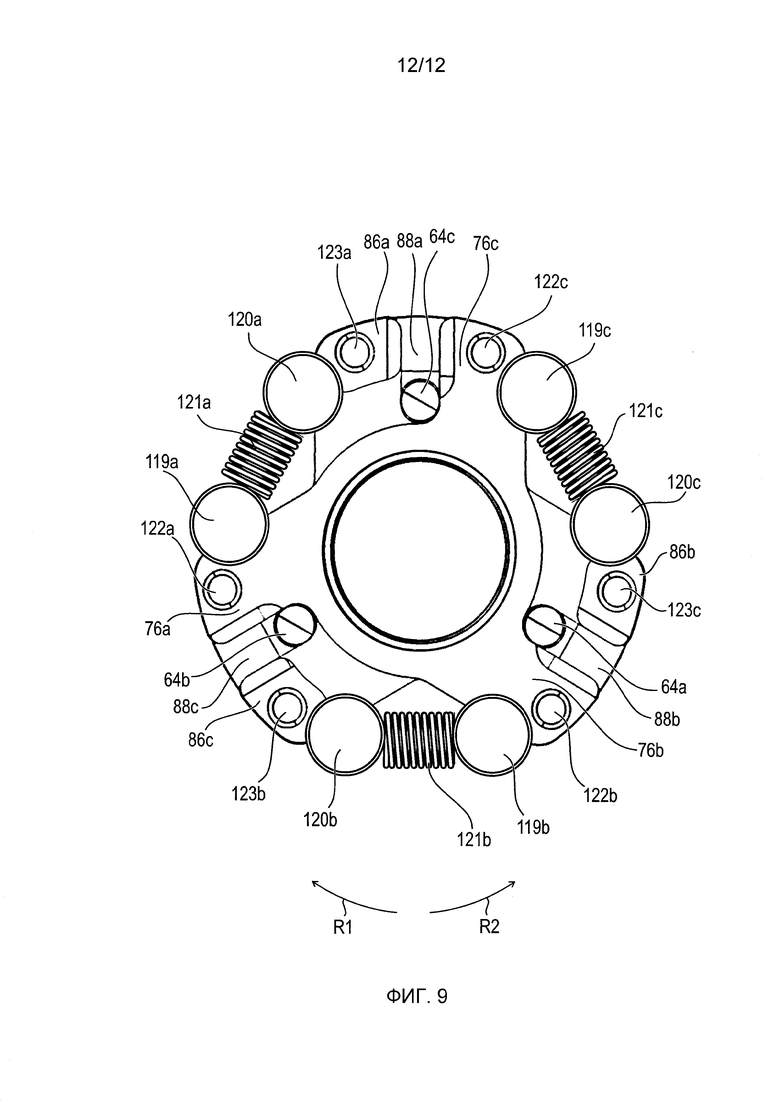
фиг. 9: детальное изображение элементов деблокировки вращения.
На фиг. 1 показано изображение в перспективе системы операционного стола 10, снабженного экстензионной приставкой 17, которая предпочтительно применяется для артроскопии бедра и минимально инвазивного протезирования бедра. Операционный стол 10 имеет основание 12 операционного стола, стойку 14 операционного стола и поверхность 16 для размещения пациента.
Экстензионная приставка 17 включает в себя первую экстензионную рейку 26 и вторую экстензионную рейку 28, которые соединены каждая первым концом с операционным столом 10. Противоположным вторым концом первой экстензионной рейки 26 эта рейка через первый соединительный узел 22 и через регулировочный узел 30 для вращательной и продольной перестановки соединена с первым устройством 18 для помещения стопы. Вторая экстензионная рейка 28 через второй соединительный узел соединена со вторым устройство 20 для помещения стопы.
Первое устройство 18 для помещения стопы служит для помещения стопы оперируемой ноги пациента, а второе устройство 20 для помещения стопы служит для помещения стопы не оперируемой ноги пациента. Таким образом, регулировочный узел для вращательной и продольной перестановки между вторым соединительным узлом 24 и вторым устройством 20 для помещения стопы не требуется. Второе устройство 20 для помещения стопы через соединительный стержень 32 соединено со вторым соединительным узлом 24. Соединительные узлы 22, 24 установлены на соответствующих экстензионных рейках 26, 28 с возможностью смещения и фиксации, чтобы адаптировать экстензионную приставку 17 к телосложению пациента. Регулировочный узел 30 для вращательной и продольной перестановки называется также агрегатом с ходовым винтом, работающим на растяжение.
Альтернативно между соединительным узлом 24 и устройством 20 для помещения стопы может быть также установлен регулировочный узел, конструкция и функция которого совпадает с конструкцией и функцией регулировочного узла 30.
На фиг. 2 показан вид сбоку в перспективе регулировочного узла 30. Регулировочный узел 30 имеет первый маховик 34 для осевого смещения соединительного элемента 44 по продольной оси Z вращения регулировочного узла 30. Соединительный элемент 44 служит для соединения регулировочного узла 30 с первым устройством 18 для помещения стопы. Регулировочный узел 30 включает в себя также второй маховик 36 для вращательной регулировки соединительного элемента 44, так что с помощью маховика 36 может изменяться угол вращения первого устройства 18 для помещения стопы.
В корпусе регулировочного узла 30 установлен механизм, находящийся в активном соединении с вращающимися колесами 34, 36, с которым соединительный элемент 44 соединен через позиционирующую головку 42. Посредством позиционирующей головки 42 положение соединительного элемента 44 может поворачиваться вокруг оси вращения ортогонально к продольной оси Z вращения регулировочного узла 30. С помощью зажимного затвора 46 позиционирующей головки 42 соединительный элемент 44 может фиксироваться в повернутом положении. Посредством шарнира 40 регулировочный узел 30 соединен с креплением 41 шарнирной головки соединительного узла 22.
На фиг. 3 показано продольное сечение регулировочного узла 30. Регулировочный узел 30 имеет жестко соединенный с первым маховиком 34 приводной ходовой винт 48, который служит для привода системы 51 телескопических трубок для осевого смещения позиционирующей головки 42. Система 51 телескопических трубок изображена на фигурах во втянутом положении. Система 51 телескопических трубок имеет внутреннюю телескопическую трубку 51a и наружную телескопическую трубку 51b. Наружная телескопическая трубка 51b помещена с фиксацией от вращения в торцевое отверстие приводного вала 55 привода 53 вращения, приводимого в движение с помощью второго маховика 36. Конструкция и функция привода 53 вращения поясняются еще подробнее ниже в связи с другими фигурами.
Обращенный к первому приводному колесу 34 конец внутренней телескопической трубки 51a жестко соединен с салазками 52, перемещаемыми с помощью приводного ходового винта 48, внутренняя резьба 52a которых находится в зацеплении с наружной резьбой 49 приводного ходового винта 48. Приводные салазки 52 имеют первый носик 52b, выдающийся вверх сквозь верхнюю прорезь, имеющуюся в наружной телескопической трубке 51b, и носик 52c, выдающийся сквозь вторую нижнюю прорезь в наружной телескопической трубке 51b. Благодаря этому салазки 52 при вращении наружной телескопической трубки 51b с помощью привода 53 вращения вращаются вместе с наружной телескопической трубкой 51b, так что при этом также внутренняя телескопическая трубка 51a, соединенная с фиксацией от вращения с салазками 52, и позиционирующая головка 42 вращается вместе с наружной телескопической трубкой 51b. Таким образом, при выдвижении внутренней телескопической трубки 51a из наружной телескопической трубки 51b позиционирующая головка 42 втягивается и выдвигается, сохраняя сове угловое положение. Обращенный к позиционирующей головке 42 конец приводного ходового винта 48 помещен с возможностью вращения в подшипник 50, при этом приводной ходовой винт 48 соединен с подшипником 50 таким образом, что подшипник 50 при втягивании и выдвижении внутренней телескопической трубки 51a скользит по ее внутренней стенке. Наружная телескопическая трубка 51b концом, находящимся напротив приводного вала 55, помещена в выполненной в корпусе 38 подшипниковой втулке, так что этот конец наружной телескопической трубки 51b надежно удерживается и обладает возможностью вращения относительно корпуса 38. Носики 52b, 52c салазок 52 находятся в зацеплении с проходящим по периметру индикаторным кольцом 52d, посредством которого на шкале 52e, видимой снаружи через смотровое окно в корпусе 38, отображается осевое положение внутренней телескопической трубки 51a. Путем вращения приводного ходового винта 48 с помощью первого маховика 34 внутренняя телескопическая трубка 51a может выдвигаться из наружной телескопической трубки 51b и снова вдвигаться.
Продольная ось Z регулировочного узла 30 одновременно является центральной осью приводного ходового винта 48 и телескопических трубок 51a, 51b, так что продольная ось Z одновременно является осью Z вращения, вокруг которой тогда позиционирующая головка 42 может вращаться вращения вместе с устройством 18 для помещения стопы с помощью привода 53.
Между первым маховиком 34 и вторым маховиком 36 установлен исполнительный элемент 54, при приведении в действие которого обеспечивается возможность вращения наружной телескопической трубки 51b вместе с внутренней телескопической трубкой 51a даже без вращательного движения второго маховика 36. Для приведения в действие исполнительного элемента 54 этот элемент смещается по оси Z вращения в направлении позиционирующей головки 42. Ход приведения в действие по оси Z ограничен расстоянием от повернутого от позиционирующей головки 42 конца ступицы 37 второго маховика 36 до предусмотренного на исполнительном элементе 54 выступа 54a. Чтобы обеспечить возможность вращения, независимого от второго маховика 36, исполнительный элемент 54 находится в зацеплении посредством трех смещаемых в осевом направлении штифтов, из которых штифт, видимый на фиг. 3, обозначен ссылочным обозначением 56a. Эти три штифта установлены на равных угловых расстояниях вокруг оси Z вращения и на других фигурах также обозначены ссылочными обозначениями 56a, 56b, 56c.
На фиг. 4 показано увеличенное изображение фрагмента продольного сечения в соответствии с фиг. 3, включающего в себя элементы привода 53 вращения. Привод 53 вращения включает в себя устройство 60 для самотормозящегося двунаправленного привода приводного вала 55. Второй маховик 36 через штифты 56a-56c находится в зацеплении с вращательным элементом 62, так что вращательное движение второго маховика 36 передается на вращательный элемент 62. Вращательный элемент 62 помещен в корпусе 38 с возможностью вращения вокруг оси Z вращения посредством первого шарикоподшипника 82. Кроме того, вращательный элемент 62 с возможностью свободного вращения установлен на конце приводного вала 55, обращенном ко второму маховику 36. Помимо этого, как второй маховик 36, исполнительный элемент 54, так и приводной вал 55 установлены каждый с возможностью свободного вращения на приводном ходовом винте 48. Кроме того, конец приводного вала 55, обращенный к позиционирующей головке 42, помещен в корпус 38 посредством второго шарикоподшипника 84. Кроме того, три захватных штифта, жестко соединенных с вращательным элементом 62, из которых захватный штифт, видимый на фиг. 4, обозначен ссылочным обозначением 64a, а другие, видимые на других фигурах захватные штифты ссылочными обозначениями 64b и 64c, вдаются в три отверстия, предусмотренные в области приводного вала 55, образующей внутреннюю часть 72 привода 53 вращения, из которых отверстие, видимое на фиг. 4, обозначено ссылочным обозначением 70a, а другие, видимые на других фигурах отверстия ссылочными обозначениями 70b и 70c. При этом захватные штифты 64a-64c продеты сквозь диск 66 деблокировки вращения, причем этот диск 66 деблокировки вращения обладает возможностью смещения в направлении оси Z вращения с помощью штифтов 56a-56c в направлении позиционирующей головки 42 для деблокировки вращения приводного вала 55 без приведения в действие второго маховика 36.
Диаметр отверстий 70a-70c в настоящем примере осуществления на 2 мм больше, чем диаметр захватных штифтов 64a-64c. Таким образом, захватные штифты 64a-64c помещены в отверстия 70a-70c с зазором 2 мм, т.е. 1 мм в каждом направлении R1, R2 вращения, так что при вращении второго маховика 36 в пределах зазора вращение приводного вала 44 не происходит. Как хорошо видно на фиг. 9, захватные штифты 64a-64c продеты при этом между лучами 76a-76c первой вращающейся звездочки 76 и между лучами 86a-86c второй вращающейся звездочки 86, с которыми жестко соединены деблокирующие штифты, служащие деблокирующими элементами. Продольные оси деблокирующих штифтов 64a-64c, а также продольные оси захватных штифтов 64a-64c проходят параллельно оси Z вращения. Соединенные с каждой вращающейся звездочкой 76, 86 деблокирующие штифты вращаются при вращении захватных штифтов 64a-64c в пределах зазора, имеющегося между отверстиями 70a-70c и захватными штифтами 64a-64c, при этом, в зависимости от направления вращения, вращается первая вращающаяся звездочка 76 или вторая вращающаяся звездочка 86. При приведении в действие исполнительного элемента 54 посредством штифтов 56a-56c диск 66 деблокировки вращения движется в направлении внутренней части 72, вследствие чего обе вращающиеся звездочки 76, 86 одновременно вращаются в противоположных направлениях вращения, как еще будет поясняться подробнее позднее в связи с фиг. 8 и 9. Между внутренней частью 72 и вращающимися звездочками 76, 86 установлен промежуточный диск 68, снабженный отверстиями для продевания захватных штифтов 64a-64c.
Первая вращающаяся звездочка 76 и вторая вращающаяся звездочка 86 оперты с возможностью вращения вокруг оси Z вращения на приводной вал 55. Вокруг внутренней части 72 установлена наружная часть 80, соединенная с фиксацией от вращения с корпусом 38, которая по меньшей мере в области внутренней части 72 имеет круглое отверстие 80a. Между внутренней частью 72 и наружной частью 80 установлены всего шесть зажимных роликов, из которых зажимной ролик, видимый на фиг. 4, снабжен ссылочным обозначением 119a.
На фиг. 5a показан вид сбоку, включающий в себя систему выбранных элементов привода 53 вращения, а на фиг. 5b - сечение системы в соответствии с фиг. 5a по линии сечения A-A. На фиг. 5c показано изображение сечения системы в соответствии с фиг. 5a по линии сечения B-B.
Внутренняя часть 72 имеет по существу треугольную основную форму с одинаковой длиной сторон 72a-72c. Кроме того, на фиг. 5b изображена наружная часть 80, стационарно установленная в корпусе 80. Между сторонами 72a-72c и внутренними круглыми отверстиями 80a наружной части соответственно на одинаковых угловых расстояниях вокруг оси Z вращения установлены блокирующие и деблокирующие системы 118a-118c, как это лучше всего видно на фиг. 5b. Элементы отдельных блокирующих и деблокирующих систем 118a-118c обозначены каждый одинаковой цифрой ссылочного обозначения и сквозной прописной буквой, при этом для элементов первой блокирующей и деблокирующей системы 118a используется буква a, для элементов второй блокирующей и деблокирующей системы буква b, а для элементов третьей блокирующей и деблокирующей системы 118c буква c. Вследствие одинаковой конструкции блокирующих и деблокирующих узлов 118a-118c далее подробно описывается только первый блокирующий и деблокирующий узел 118a. Пояснения к конструкции и функции первого блокирующего и деблокирующего узла 118a относятся также к другим блокирующим и деблокирующим узлам 118b и 118c.
Блокирующая и деблокирующая система 118a включает в себя зажимные ролики 119a, 120a, установленные между стороной 72a внутренней части 72 и круглым отверстием 80a наружной части 80, пружину 121a сжатия, установленную между зажимными роликами 119a, 120a, первый деблокирующий элемент 122a, который установлен на стороне зажимного ролика 119a, противоположной пружине 121a, и второй деблокирующий элемент 123a, который установлен на стороне зажимного ролика 120a, противоположной пружине 121a. Область поперечного сечения между стороной 72a и круглым отверстием 80a сужается в направлении конца стороны 72a, так что боковые поверхности зажимных роликов 119a, 120a в положении, показанном на фиг. 5b, прилегают как к внутренней стороне круглого отверстия 80a, так и к наружной стороне 72a, так что при вращении внутренней части 72 в первом направлении R1 вращения зажимной ролик 119a зажимается между стороной 72a и круглым отверстием 80a.
При вращении внутренней части 72 в противоположном, втором направлении R2 вращения зажимной ролик 120a зажимается между круглым отверстием 80a и стороной 72a. При этом вращение внутренней части 72 относительно стационарной наружной части 80 предотвращается зажимными роликами 119a, 120a. Область между стороной 72a и круглым отверстием 80a, в которой установлен ролик 119a, называется первой зажимной областью 124a, а область между стороной 72a и круглым отверстием 80a, в которой установлен второй зажимной ролик 120a, называется второй зажимной областью 125a. Наружная часть 80, внутренняя часть 72 и первый зажимной ролик 118a образуют, таким образом, первый блокирующий узел, а наружная часть 80, внутренняя часть 72 и второй зажимной ролик 125a образуют второй блокирующий узел, при этом первый блокирующий узел, имеющий зажимной ролик 119a, препятствует вращению внутренней части в направлении R1 вращения, а блокирующий узел, имеющий зажимной ролик 120a, препятствует вращению внутренней части 72 в направлении R2 вращения.
Зажимные ролики 119a, 120a с помощью пружины 120a вдавливаются в их соответствующую зажимную область 124a, 125a. Если к приводному валу 55 на выходе прилагается вращающий момент, который, в частности, через устройство 18 для помещения стопы направляется в регулировочный узел 30 и передается от телескопических трубок 51a, 51b на приводной вал 55, блокирующие и деблокирующие системы 118a-118c блокируют вращательное движение, так что вращение устройства 18 для помещения стопы надежно предотвращается.
Однако при необходимости активной регулировки вращения устройства 18 для помещения стопы вращается второй маховик 36, так что посредством вращательного элемента 62 осуществляется вращение захватных штифтов 64a-64c вокруг оси Z вращения. Так как захватные штифты 64a-64c, как уже упомянуто, помещены в соответствующем отверстии 70a-70c с зазором, вращение захватных штифтов 64a-64c вокруг оси Z вращения в первой угловой области происходит без совместного вращения внутренней части 72. При вращении захватных штифтов 64a-64c в направлении R1 вращения первая вращающаяся звездочка 76, имеющая деблокирующие штифты 122a, 122b и 122c, вращается в направлении R1 вращения, так что деблокирующий штифт 122a движется из нейтрального положения в деблокированное положение и при этом контактирует с зажимным роликом 119a и выдавливает из его зажимной области 124a. Вследствие этого зажимной ролик 119a больше не может блокировать вращение внутренней части 72. Движение внутренней части 72 в направлении R1 вращения, таким образом, деблокировано, так что при дальнейшем вращении захватных штифтов 64a-64c в направлении R1 вращения они контактируют со стенками отверстий 70a-70c и вращают внутреннюю часть 72 вместе с приводным валом 55. В отличие от внутренней части 72, при этом вращающаяся звездочка 76 в направлении R1 вращения находится в зацеплении с захватными штифтами 64a-64c без зазора или с существенно меньшим зазором, чем находятся в зацеплении захватные штифты 64a-64c и отверстия 70a-70c.
При вращении внутренней части 72 вращается приводной вал 55, выполненный цельно или неразъемно с внутренней частью 72, так что телескопические трубки 51a, 51b и позиционирующая головка 42, установленная на переднем конце внутренней телескопической трубки 51a, вращаются вместе с внутренней частью 72. Если сила привода со стороны маховика 36 больше не действует, зажимной ролик 119a силой упругости пружины 121a вдавливается обратно в зажимную область 124a, благодаря чему деблокирующий элемент 122a движется обратно в свое нейтральное положение, так что вращение внутренней части 72 в направлении R1 вращения после этого надежно предотвращается зажимным роликом 119a, даже тогда, когда посредством устройства 10 для помещения стопы в направлении R1 вращения передается вращающий момент для вращения внутренней части 72. При обратном движении деблокирующего элемента 122a вращающаяся звездочка 76 вращается во втором направлении R2 вращения, так что все соединенные с вращающейся звездочкой 76 деблокирующие элементы 122a-122c движутся обратно в свое нейтральное положение.
При вращении второго маховика 36 в направлении R2 вращения вращательное движение по существу без зазора через вращательный элемент 62 передается на захватные штифты 64a-64c, которые вращаются в направлении R2 вращения вокруг оси Z вращения. Как уже упомянуто, захватные штифты 64a-64c с зазором помещены в отверстия 70a-70c внутренней части 72, так что захватные штифты 64a-64c могут вращаться в направлении R2 вращения на некоторую угловую величину, пока они не наткнутся на стенки отверстий 70a-70c и не передадут приводной вращающий момент на внутреннюю часть 72. При этой угловой перестановке в пределах зазора захватные штифты 64a-64c вращаются вокруг второй вращающейся звездочки 86 в направлении R2 вращения, так что деблокирующий элемент 123a контактирует с зажимным роликом 120a и выдавливает против силы упругости пружины 121a из зажимной области 125a, так что внутренняя часть 72 затем может вращаться в направлении R2 вращения без зажатия зажимного ролика 120a в промежуточном пространстве между стороной 72a и круглым отверстием 80a наружной части 80. Благодаря этому возможно вращение внутренней части 72 и вместе с тем приводного вала 55 и системы 55 телескопических трубок, соединенной с приводным валом 55, в направлении R2 вращения путем одного лишь приведения в действие второго маховика 36. Если второй маховик 36 больше не вращается в направлении R2 вращения или, соответственно, если он отпускается, пружина 121a вдавливает зажимной ролик 120a обратно в зажимную область 125a, благодаря чему зажимной ролик 120a снова вдавливает деблокирующий элемент 123a из деблокированного положения обратно в его нейтральное положение, при этом вся вращающаяся звездочка 86 вращается в направлении R1 вращения, пока все элементы не придут в положение, показанное на фиг. 5b. В этом положении вращение вращающим моментом, действующим на приводной вал 55, снова легко предотвращается блокирующими и деблокирующими узлами 118a-118c. Таким образом, в описанном режиме регулировки вращения привода 53 вращения вращение возможно только путем вращения второго маховика 36. Привод 53 вращения, как еще подробно описывается ниже в связи с фиг. 8 и 9, может также эксплуатироваться в режиме деблокировки вращения, который может активироваться с помощью уже упомянутого исполнительного элемента 54. В этом режиме деблокировки вращения с помощью деблокирующих элементов 122a, 123a оба зажимных ролика 119a, 120 одновременно движутся из своих зажимных областей 124a, 125a, так чтобы вращательное движение внутренней части 72 было деблокировано, и внутренняя часть 72 и все элементы 55, 51a, 51b, 42, 44, 18, соединенные с внутренней частью 72 с фиксацией от вращения, могли свободно вращаться в двух направлениях R1 и R2 вращения, как посредством второго маховика 36, так и посредством вращающего момента, действующего на приводной вал 55, в частности через устройство 18 для помещения стопы.
Для этого исполнительный элемент 54 через штифты 56a-56c, смещаемые в осевом направлении, находится в зацеплении с диском 66 деблокировки вращения (см. штифт 56a на фиг. 5a, 5c) и давят на диск 66 деблокировки вращения в направлении внутренней части 72, вследствие чего диск 66 деблокировки вращения одновременно вращает первую вращающуюся звездочку 76 в направлении R1 вращения и вторую вращающуюся звездочку 86 в направлении R2 вращения, вследствие чего деблокирующие штифты 122a-122c, 123a-123c, соединенные с вращающимися звездочками 76, 86, одновременно движутся из своих нейтральных положений в свои деблокированные положения и при этом одновременно выжимают зажимные ролики 119a-119c и 120a-120c из их зажимных областей 124a-124c, 125a-125c. Посредством пружин 74a, 74b и 74c, установленных между вращающимися звездочками 76, 86 и диском 66 деблокировки вращения, из которых на фиг. 5a видна только пружина 74a, создается возвратная сила для возврата исполнительного элемента 54 в положение, показанное на фиг. 4, так что тогда, когда исполнительный элемент 54 больше не задействован, диск 66 деблокировки вращения и исполнительный элемент 54, соединенный посредством штифтов 56a-56c, движется обратно, и происходит возврат в исходное положение деблокирующих элементов 122a-122c, 123a-123c силой упругости пружин 121a-121c. При этом зажимные ролики 119a-119c, 120a-120c автоматически движутся обратно в свои зажимные области 124a-124c, 125a-125c, так что вращение внутренней части 72 вращающим моментом на выходе снова просто и надежно предотвращается блокирующими и деблокирующими системами 118a-118c.
На фиг. 6 показано изображение в перспективе поперечного сечения привода 53 вращения и корпуса 38 по линии сечения A-A в соответствии с фиг. 5a.
На фиг. 7a показан другой вид элементов привода 53 вращения в частично рассеченном изображении, аналогично фиг. 5a, при этом элементы привода 53 вращения изображены в другом угловом положении, чем на фиг. 5a. Кроме того, на фиг. 7a дополнительно изображена ступица 37 второго маховика 36 без трех рычагов, ввертываемых в нее для вращения ступицы 37.
Три штифта 56a-56c вдаются сквозь ступицу 37 и распространяются дальше через вращательный элемент 62. При этом штифты 56a-56c передают вращательное движение маховика 36 на вращательный элемент 62. Штифты 56a-56c установлены на одинаковых угловых расстояниях вокруг оси Z вращения. Жестко соединенные с вращательным элементом 62 захватные штифты 64a-64c установлены на другой круговой траектории, или со смещением относительно штифтов 56a-56c, на одинаковых угловых расстояниях вокруг оси Z вращения. При этом вращательное движение, передаваемое от второго маховика 36 через штифты 56a-56c на вращательный элемент 62, без зазора передается на захватные штифты 64a-64c, которые тогда, как описано, двигают положение деблокирующих элементов 123a-123c, 124a-124c, в зависимости от направления R1, R2 вращения, из нейтрального положения в деблокированное положение, а следовательно, вращают внутреннюю часть 72. Как уже упомянуто, штифты 56a-56c служат также для соединения исполнительного элемента 54 с диском 66 деблокировки вращения, при этом штифты 56a-56c с помощью исполнительного элемента 54 смещаются в осевом направлении в направлении вращающихся звездочек 76, 86, и диск 66 деблокировки вращения смещается в направлении вращающихся звездочек 76, 86.
На фиг. 7b представлено изображение сечения системы, показанной на фиг. 7a, включающей в себя элементы привода 53 вращения, по линии сечения A-A в соответствии с фиг. 7a. Как на фиг. 7a, так и на фиг. 7b ни наружная часть 80, ни корпус 38 не изображены.
На фиг. 8 показано другое изображение в перспективе системы, включающей в себя элементы привода 53 вращения, на котором хорошо видны элементы для деблокировки вращательного движения приводного вала 55, независимого от приведения в действие второго маховика 36. Как уже пояснено выше, штифты 56a-56c при приведении в действие исполнительного элемента 54 смещаются в направлении вращающихся звездочек 76, 86 и при этом давят на диск 66 деблокировки вращения в направлении вращающихся звездочек 76, 86. Для этого диск 66 деблокировки вращения имеет выступающие в направлении вращающихся звездочек 76, 86 элементы 66a-66c деблокировки вращения, которые вдавливаются в области 88a-88c, образованные между лучами 86a-86c и 76a-76c вращающихся звездочек 76, 86, и при этом вращают вращающиеся звездочки 76, 86 друг относительно друга, так что все деблокирующие элементы 122a-122c, 123a-123c одновременно движутся из их нейтрального положения в их деблокированное положение. Вследствие этого все зажимные ролики 119a-119c, 120a-120c движутся из их зажимных областей 124a-124c, 125a-125c, так что возможно также свободное вращение приводного вала посредством вращающих моментов на выходе. Когда исполнительный элемент 54 движется обратно в свое исходное положение, штифты 56a-56c больше не давят на диск 66 деблокировки вращения в направлении вращающихся звездочек 76, 86, так что диск 66 деблокировки вращения посредством пружин 74a-74c по оси Z вращения движется обратно в направлении приводных колес 34, 36, так чтобы элементы 66a-66c деблокировки вращения больше не были вдавлены между лучами 76a-76c, 86a-86c вращающихся звездочек 76, 86, и зажимные ролики 119a-119c, 120a-120c действующей на них силой упругости пружин 121a-121c вдавливались обратно в зажимные области 124a-124c, 125a-125c, и все деблокирующие элементы 122a-122c, 123a-123c двигались из их деблокированного положения в их нейтральное положение.
Альтернативно описанному приведению в действие исполнительного элемента 54 путем давления на исполнительный элемент в направлении второго маховика или, соответственно, в направлении переднего конца регулировочного узла 30, в другом варианте осуществления приведение в действие исполнительного элемента 54 может также осуществляться путем подтягивания исполнительного элемента в направлении первого маховика 36 или, соответственно, в направлении заднего конца регулировочного узла 30. В частности, диск 66 деблокировки вращения крутится, так что элементы 66a-66c деблокировки вращения выступают в направлении исполнительного элемента 54. Кроме того, диск 66 деблокировки вращения устанавливается тогда между внутренней частью 72 и вращающимися звездочками 76, 86.
Список ссылочных обозначений
10 Операционный стол
12 Основание операционного стола
14 Стойка операционного стола
16 Поверхность для размещения пациента
17 Экстензионная приставка
18 Первое устройство для помещения стопы
20 Второе устройство для помещения стопы
22 Первый соединительный узел
24 Второй соединительный узел
26 Первая экстензионная рейка
28 Вторая экстензионная рейка
30 Регулировочный узел для вращательной и продольной перестановки
32 Соединительный стержень
34 Первый маховик
36 Второй маховик
38 Корпус
40 Шарнир
41 Крепление шарнирной головки
42 Позиционирующая головка
44 Соединительный элемент
46 Зажимной затвор
48 Приводной ходовой винт
49 Наружная резьба
50 Подшипник
51 Система телескопических трубок
51a Внутренняя телескопическая трубка
51b Наружная телескопическая трубка
52 Салазки
52a Внутренняя резьба
52b, 52c Носик
52d Индикаторное кольцо
52e Шкала
53 Привод вращения
54 Исполнительный элемент
54a Выступ
55 Приводной вал
56a, 56b, 56c Штифт
60 Устройство для самотормозящегося двунаправленного привода
62 Вращательный элемент
64a, 64b, 64c Захватные штифты
66 Диск деблокировки вращения
66a, 66b, 66c Элементы деблокировки вращения
68 Промежуточный диск
70a, 79b, 70c Отверстия
72 Внутренняя часть
74a, 74b, 74c Пружина
76 Первая вращающаяся звездочка
76a, 76b, 76c Лучи первой вращающейся звездочки
80 Наружная часть
80a Круглое отверстие
82, 84 Шарикоподшипник
86 Вторая вращающаяся звездочка
86a, 86b, 86c Лучи второй вращающейся звездочки
88a, 88b, 88c Области
118a, 118b, 118c Блокирующие и деблокирующие системы
119a, 119b, 119c
120a, 120b, 120c Зажимные ролики
121a, 121b, 121c Пружина
122a, 122b, 122c
123a, 123b, 123c Деблокирующие элементы
124a, 124b, 124c
125a, 125b, 125c Зажимная область
Z Ось вращения
R1 Первое направление вращения
R2 Второе направление вращения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ВОЛОС | 2015 |
|
RU2687314C2 |
| БАЛАНСИРОВОЧНОЕ УСТРОЙСТВО, КОРПУС БАЛАНСИРОВОЧНОГО УСТРОЙСТВА, СТИРАЛЬНАЯ МАШИНА, СОДЕРЖАЩАЯ ЕГО, И СПОСОБ УПРАВЛЕНИЯ ЕЮ | 2013 |
|
RU2600714C2 |
| КОНДИЦИОНЕР И СПОСОБ ЕГО УПРАВЛЕНИЯ | 2016 |
|
RU2692461C1 |
| СПОСОБ И БАРАБАН ДЛЯ ОБЕРТЫВАНИЯ КОЛЬЦЕВОЙ КРЕПЕЖНОЙ КОНСТРУКЦИИ В ПРОЦЕССЕ СБОРКИ ШИН ДЛЯ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2684799C2 |
| УСТРОЙСТВО БЛОКИРОВКИ РУЛЕВОЙ КОЛОНКИ | 2009 |
|
RU2477689C2 |
| ЗАХВАТЫВАЮЩАЯ И БЛОКИРУЮЩАЯ/ДЕБЛОКИРУЮЩАЯ СИСТЕМА И ЕЕ ПРИМЕНЕНИЕ ДЛЯ МАНИПУЛИРОВАНИЯ ДЕРЖАТЕЛЯМИ ОБРАЗЦОВ ЯДЕРНЫХ МАТЕРИАЛОВ | 2013 |
|
RU2642437C2 |
| ОРТОПЕДИЧЕСКОЕ СУСТАВНОЕ УСТРОЙСТВО | 2019 |
|
RU2803115C2 |
| СИЛОВОЙ ПРИВОД | 2005 |
|
RU2403360C2 |
| БЫТОВОЙ ПРИБОР С ЦЕНТРАЛЬНЫМ УПРАВЛЕНИЕМ | 2005 |
|
RU2370198C2 |
| БЫТОВОЙ ПРИБОР С ПРЕДОХРАНИТЕЛЬНЫМ УСТРОЙСТВОМ | 2005 |
|
RU2374973C2 |
Изобретение касается устройства для самотормозящегося двунаправленного привода медицинского терапевтического устройства, содержащего первый блокирующий узел для блокировки вращения внутренней части в первом направлении (R1) вращения и для деблокировки вращения внутренней части во втором направлении (R2) вращения, и имеющего второй блокирующий узел для блокировки вращения внутренней части во втором направлении (R2) вращения и для деблокировки вращения внутренней части в первом направлении (R1) вращения. Внутренняя часть через приводной вал соединена с медицинским терапевтическим устройством. Предусмотрены два деблокирующих элемента, перемещаемых с помощью элемента привода в свое деблокированное положение, которые препятствуют блокировке вращения внутренней части каждый в одном из направлений (R1, R2) вращения, так что вращение внутренней части и медицинского терапевтического устройства, соединенного с внутренней частью через приводной вал, возможно только с помощью элемента привода. 15 з.п. ф-лы, 12 ил.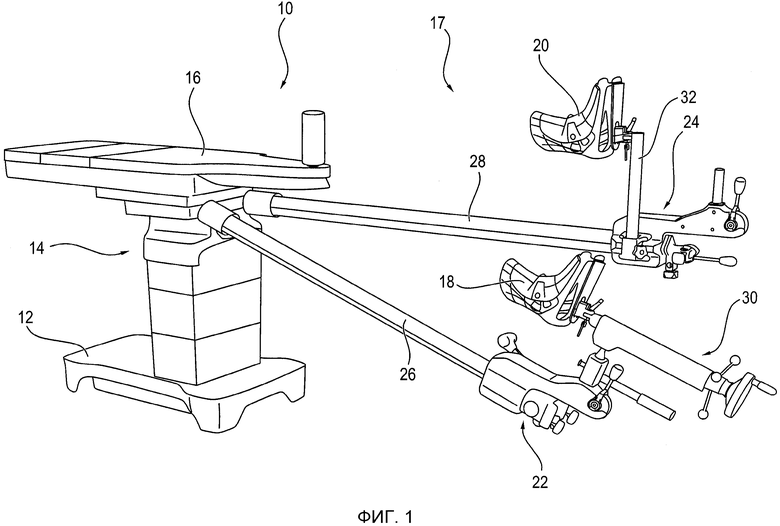
1. Устройство для самотормозящегося двунаправленного привода медицинского терапевтического устройства (18),
содержащее вращающуюся вокруг оси (Z) вращения внутреннюю часть (72),
наружную часть (80), зафиксированную от вращения, имеющую круглое отверстие (80a), которое окружает внутреннюю часть (72) и расположено концентрически вокруг оси (Z) вращения,
вращающийся вокруг оси (Z) вращения приводной вал (55), который соединен с внутренней частью (72) и выполнен с возможностью соединения с терапевтическим устройством (18),
элемент (86) привода для вращения внутренней части (72) вместе с приводным валом (55) вокруг оси (Z) вращения,
первый зажимной элемент (119a-119c) и второй зажимной элемент (120a-120c), которые установлены в промежуточном пространстве между внутренней частью (72) и наружной частью (80), отличающееся тем,
что наружная часть (80), внутренняя часть (72) и первый зажимной элемент (119a-119c) образуют первый блокирующий узел для блокировки вращения внутренней части (72) в первом направлении (R1) вращения и для деблокировки вращения внутренней части (72) во втором направлении (R2) вращения,
наружная часть (80), внутренняя часть (72) и второй зажимной элемент (120a-120c) образуют второй блокирующий узел для блокировки вращения внутренней части (72) во втором направлении (R2) вращения и для деблокировки вращения внутренней части (72) в первом направлении (R1) вращения,
предусмотрен первый деблокирующий элемент (122a-122c), перемещаемый элементом (36) привода в первое деблокированное положение, который препятствует блокировке вращения внутренней части (72) в первом направлении (R1) вращения первым блокирующим узлом, и
предусмотрен второй деблокирующий элемент (123a-123c), перемещаемый элементом (36) привода во второе деблокированное положение, который препятствует блокировке вращения внутренней части (72) во втором направлении (R2) вращения вторым блокирующим узлом.
2. Устройство по п. 1, отличающееся тем, что элемент (36) привода при вращении в первом направлении (R1) вращения сначала перемещает первый деблокирующий элемент (122a-122c) из первого нейтрального положения в первое деблокированное положение, в котором этот первый деблокирующий элемент (122a-122c) препятствует блокировке вращения внутренней части (72) в первом направлении (R1) вращения первым блокирующим узлом, и при дальнейшем вращении вращает внутреннюю часть (72) в первом направлении (R1) вращения, и
элемент (36) привода при вращении во втором направлении (R1) вращения сначала перемещает второй деблокирующий элемент (123a-123c) из второго нейтрального положения во второе деблокированное положение, в котором второй деблокирующий элемент (123a-123c) препятствует блокировке вращения внутренней части (72) во втором направлении (R2) вращения вторым блокирующим узлом, а при дальнейшем вращении вращает внутреннюю часть (72) во втором направлении (R2) вращения.
3. Устройство по п. 1 или 2, отличающееся тем, что первый зажимной элемент (119a-119c) при вращении внутренней части (72) в первом направлении (R1) вращения выполнен с возможностью зажима в первой зажимной области (124a-124c), образованной между наружной частью (80) и внутренней частью (72), и
второй зажимной элемент (120a-120c) выполнен с возможностью зажима во второй зажимной области (125a-125c), образованной между наружной частью (80) и внутренней частью (72).
4. Устройство по п. 3, отличающееся тем, что между первым зажимным элементом (119a-119c) и вторым зажимным элементом (120a-120c) установлен упругодеформируемый элемент (121a-121c), который вдавливает первый зажимной элемент (119a-119c) в первую зажимную область (124a-124c), а второй зажимной элемент (120a-120c) - во вторую зажимную область (125a-125c).
5. Устройство по п. 4, отличающееся тем, что упругий элемент представляет собой пружину, предпочтительно спиральную пружину (121a-121c), установленную между зажимными элементами (119a-119c, 120a-120c).
6. Устройство по п. 4, отличающееся тем, что первый деблокирующий элемент (122a-122c) установлен на стороне первого зажимного элемента (119a-119c), повернутой от упругодеформируемого элемента (121a-121c), а второй деблокирующий элемент (123a-123c) - на стороне второго зажимного элемента (120a-120c), повернутой от упругодеформируемого элемента (121a-121c).
7. Устройство по п. 1, отличающееся тем, что первый блокирующий узел и второй блокирующий узел при вращающем моменте, приложенном к приводному валу (55) и/или к внутренней части (72) на выходе, препятствуют вращению внутренней части (72) и приводного вала без задействования элемента (36) привода.
8. Устройство по п. 1, отличающееся тем, что устройство обеспечивает возможность вращения приводного вала (55) без отдельной деблокировки вращения только при задействовании элемента (36) привода.
9. Устройство по п. 1 или 2, отличающееся тем, что элемент (36) привода находится в зацеплении с внутренней частью (72) посредством по меньшей мере одного элемента (64a-64c) зацепления, причем этот элемент (64a-64c) зацепления помещен в выемку (70a-70c) внутренней части с зазором и/или причем этот элемент (64a-64c) зацепления помещен в выемку элемента (36) привода с зазором, причем этот зазор предпочтительно имеет величину в пределах от 0,5 мм до 5 мм.
10. Устройство по п. 9, отличающееся тем, что элемент зацепления представляет собой штифт (64a-64c), а выемка - отверстие (70a-70c), причем этот штифт (64a-64c) вдается в отверстие (70a-70c), а диаметр отверстия (70a-70c) предпочтительно больше, чем диаметр штифта (64a-64c), на величину в пределах от 0,5 мм до 5 мм.
11. Устройство по п. 1, отличающееся тем, что первый деблокирующий элемент (122a-122c) и второй деблокирующий элемент (123a-123c) находятся в активном соединении с исполнительным элементом (54), и
исполнительный элемент (54) при приведении в действие перемещает первый деблокирующий элемент (122a-122c) в первое деблокированное положение, а второй деблокирующий элемент (123a-123c) - во второе деблокированное положение.
12. Устройство по п. 1, отличающееся тем, что первая блокирующая и деблокирующая система (118a) включает по меньшей мере первый блокирующий узел, второй блокирующий узел, первый деблокирующий элемент (122a) и второй деблокирующий элемент (123a),
устройство включает по меньшей мере одну вторую блокирующую и деблокирующую систему (118b), при этом конструкция и функция этой второй блокирующей и деблокирующей системы (118b) совпадают с конструкцией и функцией первой блокирующей и деблокирующей системы (118a),
блокирующие и деблокирующие системы (118a, 118b) установлены на одинаковых угловых расстояниях вокруг оси (Z) вращения.
13. Устройство по п. 12, отличающееся тем, что это устройство включает блокирующие и деблокирующие системы (118a, 118b), конструкция и функция которых совпадают, и которые установлены на одинаковых угловых расстояниях вокруг оси (Z) вращения.
14. Устройство по п. 1, отличающееся тем, что первая блокирующая и деблокирующая система (118a) включает по меньшей мере первый деблокирующий элемент (122a), второй деблокирующий элемент (123a), первый зажимной элемент (119a) и второй зажимной элемент (120a),
вторая блокирующая и деблокирующая система (118b) включает по меньшей мере третий деблокирующий элемент (122b), четвертый деблокирующий элемент (123b), третий зажимной элемент (119b) и четвертый зажимной элемент (120b),
третья блокирующая и деблокирующая система (118c) включает по меньшей мере пятый деблокирующий элемент (122c), шестой деблокирующий элемент (123c), пятый зажимной элемент (119c) и шестой зажимной элемент (120c),
первый, третий и пятый деблокирующий элемент (122a-122c) соединены друг с другом таким образом, что они вместе могут перемещаться вокруг оси (Z) вращения, и
второй, четвертый и шестой деблокирующий элемент (123a-123c) соединены друг с другом таким образом, что они вместе могут перемещаться вокруг оси (Z) вращения,
при этом первый, третий и пятый деблокирующий элемент (122a-122c) вместе могут перемещаться относительно второго, четвертого и шестого деблокирующего элемента (123a-123c), предпочтительно на угол в пределах от 0,5°до 5°.
15. Устройство по п. 14, отличающееся тем, что исполнительный элемент (54) при приведении в действие одновременно перемещает первый, третий и пятый деблокирующий элемент (122a-122c) вместе в первом направлении (R1) вращения, а второй, четвертый и шестой деблокирующий элемент (123a-123c) - во втором направлении (R2) вращения,
так что первый деблокирующий элемент (122a) контактирует с первым зажимным элементом (119a) и препятствует зажатию первого зажимного элемента (119a) в первой зажимной области (124a), образованной между внутренней частью (72) и наружной частью (80),
так что второй деблокирующий элемент (123a) контактирует со вторым зажимным элементом (120a) и препятствует зажатию второго зажимного элемента (120a) во второй зажимной области (125a), образованной между внутренней частью (72) и наружной частью (80),
так что третий деблокирующий элемент (122b) контактирует с третьим зажимным элементом (119b) второй блокирующей и деблокирующей системы (118b) и препятствует зажатию третьего зажимного элемента (119b) в третьей зажимной области (124b), образованной между внутренней частью (72) и наружной частью (80),
так что четвертый деблокирующий элемент (123b) контактирует с четвертым зажимным элементом (120b) второй блокирующей и деблокирующей системы (118b) и препятствует зажатию четвертого зажимного элемента (120b) в четвертой зажимной области (125b), образованной между внутренней частью (72) и наружной частью (80),
так что пятый деблокирующий элемент (122c) контактирует с пятым зажимным элементом (119c) третьей блокирующей и деблокирующей системы (118c) и препятствует зажатию пятого зажимного элемента (122c) в пятой зажимной области (124c), образованной между внутренней частью (72) и наружной частью (80), и/или
так что шестой деблокирующий элемент (123c) контактирует с шестым зажимным элементом (129c) третьей блокирующей и деблокирующей системы (118c) и препятствует зажатию шестого зажимного элемента (129c) в шестой зажимной области (125c), образованной между внутренней частью (72) и наружной частью (80).
16. Устройство по п. 5, отличающееся тем, что первый деблокирующий элемент (122a-122c) установлен на стороне первого зажимного элемента (119a-119c), повернутой от пружины (121a-121c), а второй деблокирующий элемент (123a-123c) - на стороне второго зажимного элемента (120a-120c), повернутой от пружины (121a-121c).
| DE 202009003314 U1, 28.05.2009 | |||
| US 2013191994 A1, 01.08.2013 | |||
| US 3020909 A, 13.02.1962 | |||
| ДВУХОСНЫЙ ШАРНИР | 2007 |
|
RU2428160C2 |

