Изобретение относится к способу и устройству для обнаружения в онлайн-режиме ухудшения состояния изоляции внутри или на поверхности электродвигателя.
Электрооборудование, управляемое преобразователем частоты переменного тока, все чаще применяют в различных областях. В частности, такие системы привода применяют не только серийно в промышленности, но и в системах тяги, в критичном с точки зрения безопасности оборудовании. При этом все более важным становится профилактический контроль состояния этих систем и поддержание его на надлежащем уровне. Все чаще причиной отказа подобного оборудования становится ухудшение изоляции, в частности изоляции обмотки статора. Исследования показали, что примерно от 30 до 40% всех отказов обусловлено статором, причем примерно 70% этих отказов вызвано ухудшением или дефектом изоляции обмотки и изоляции корпуса.
Изоляция обмотки статора подвержена особенно высоким нагрузкам в режиме работы с преобразователем частоты постоянного тока. При этом важны тепловые, электрические, механические нагрузки и воздействие окружающей среды. Эти нагрузки со временем вызывают ухудшение изоляции и могут привести к серьезному отказу электродвигателя или всей системы привода с двигателем.
Ухудшение состояния изоляции может проявиться не только внутри обмотки, но и в местах подключения или в проводке. Ухудшение состояния изоляции или ее дефекты в этих местах могут также вызвать отказ двигателя и поэтому необходимо по возможности быстро обнаруживать изменения состояния изоляции.
В уровне техники уже существуют различные способы обнаружения дефектов изоляции в онлайновом и офлайновом режимах, причем перечень и оценка различных технологий раскрыты, например, в статье Grubic S. et al., "Исследование методов тестирования и мониторинга изоляции статора систем низковольтных асинхронных машин, фокусировка проблем состояния изоляции", IEEE Transactions on Industrial Electronics, том 55, №12, стр.4127-4136, 2008 г. Обнаружение ухудшения состояния изоляции, особенно, в частности, между отдельными витками обмотки, раскрыто в первую очередь через возможность проведения тестов в онлайн-режиме; в качестве онлайн-тестов для таких двигателей назван т.н. PD-метод (PD - Partial Disharge - частичная разрядка), причем как недостаток этого метода названо необходимое для этого дополнительное дорогое оборудование. Однако из этого документа следует главным образом то, что целесообразны, прежде всего, методы в офлайн-режиме, в частности т.н. тест ударного напряжения (Surge Test). Недостатком такого офлайн-контроля является то, что постоянное проведение такого контроля или тестирования невозможно, их можно проводить только через относительно большие промежутки времени. Однако большое значение имеет более или менее постоянный, т.е. в онлайн-режиме, контроль в целях выявления возможного ухудшения состояния изоляции.
Из Grubic S. et al., "Новая концепция тестирования в онлайн-режиме для выявления ухудшения состояния изоляции обмотки", Energy Conversion Congress and Exposition (ECCE), стр.1747-2754, 2010 г. известна концепция онлайн-тестирования для выявления ухудшения состояния изоляции обмотки. Для этой технологии предлагают различные формы под- и отключения электрических компонентов, в частности индуктивности, в контуре подачи электроэнергии (цепи питания), в том числе, например, дополнительное отключение двигателя от электропитания. При этом необходимо приложение к двигателю нескольких импульсов с возрастающим уровнем напряжения.
Эта технология относительно трудоемка и отнимает много времени.
В JP 2010-268645 А описана технология контроля изоляции двигателей переменного тока, в частности автомобильных. При этом контролируют, в частности, состояние изоляции обмотки электродвигателя от корпуса, т.е. массы, оборудования, причем замеряют ток в нейтральной точке (нейтрали); при этом возможно замерить импульсные переходные процессы тока этой нейтрали и рассчитать параметр их затухания. Необходимый параметр может быть зафиксирован измерением суммарного тока между инвертором и оборудованием, измерением тока между корпусом оборудования и массой, измерением тока между корпусом инвертора и массой, для чего необходим специальный, дополнительный сенсорный датчик. Ухудшение состояния изоляции можно выявить только при сравнении параметров, по меньшей мере, двух двигателей.
Из US 6483319 B1 известен способ проведения теста на отклик широкополосного полного сопротивления для выявления возможности отказа обмотки статора. Отклик полного сопротивления может быть получен от наложения дискретных частот на обмотку статора, однако следствием этого является низкая разрешающая способность.
В WO 03/087855 A1 описано измерение токов в регуляторе двигателя, при этом раскрыта необходимость передискретизации для снижения соотношения сигнала и шума в измерительном сигнале. Исследование состояния изоляции здесь не предусмотрено.
В RU 2208236 С2 описано измерение сигналов напряжения крутой волны напряжения при диагностике изоляции обмотки электродвигателей, для чего необходимо дополнительно установить прибор измерения напряжения на клеммах двигателя.
Следует отметить также неопубликованную более раннюю заявку ЕР 10450114.3 или соответствующую ей РСТ-заявку WO/EP 2010/061502 (ср. Р. Nussbaumer et al. „Особенности трекинга на основе отслеживания без применения датчиков электродвигателя переменного тока с применением коммутационного инвертора переходных процессов", Proceedings of IEEE Symposium on Sensorless Control for Electrical Drives, SLED, 2010 г., стр.238-242), в которой в отличие от настоящей точки зрения описано контролирование состояния изоляции - обнаружение асимметрии в оборудовании переменного тока - посредством переходных временных утечек тока, вызванных наложением скачков напряжения на двигатель. При этом переходное протекание временных утечек тока считывают высокой тактовой частотой для получения по возможности точных цифровых параметров временных изменений тока относительно короткого времени наблюдения. Однако таким образом невозможно выявить разрастание дефектов изоляции.
Задача данного изобретения состоит в создании такого способа или устройства, посредством которых можно надежно выявлять в онлайн-режиме ухудшение состояния изоляции в электродвигателе и при этом обеспечить наименьшие аппаратные затраты.
Изобретение основано на том, что конфигурация системы привода включает преобразователь частоты переменного тока и индукционную машину и представлена сетевым комплексом сопротивлений, катушек индуктивности и емкостных элементов. При этом топология и конструкция преобразователя частоты постоянного тока влияет на паразитное емкостное сопряжение с массой. Изоляция двигателя влияет на паразитную емкость фазы на массу, фазы на фазу и обмотки на обмотку (общая изоляция обмотки или отдельных витков обмотки между собой т.н. "межобмоточная изоляция"). Очень короткое время скачков импульсов напряжения, подаваемых на обмотку двигателя при включении преобразователя частоты постоянного тока, вызывает отражение и тем самым высокочастотные колебания, при этом не только в подаваемом напряжении, но и соответственно в индуцированном в отдельных обмотках токе. При изменении одного элемента вышеназванного сетевого комплекса, а именно из-за ухудшения состояния межобмоточной изоляции, происходит "сбой настройки" всей системы с изменением вышеназванных высокочастотных, переходных колебаний.
С другой стороны необходимо отметить, что в большинстве современных систем привода в цепь питания уже включены датчики тока или сенсорные датчики, фиксирующие временные утечки тока, причем необходима и целесообразна возможность использования этих датчиков и в данной технологии выявления в онлайн-режиме ухудшения состояния изоляции.
Для решения данной задачи в изобретении предусмотрены способ и устройство согласно независимым пунктам формулы изобретения. Предпочтительные формы выполнения изобретения раскрыты в зависимых пунктах формулы.
В частности, изобретение предусматривает в первую очередь способ выявления в онлайн-режиме ухудшения состояния изоляции электродвигателя, причем посредством преобразователя частоты переменного тока на обмотку (-и) двигателя подают каскадное напряжение и индуцированный им ток и/или его временную утечку фиксируют как измерительный сигнал, по меньшей мере, одним сенсорным датчиком и подвергают передискретизации частотой, более высокой по сравнению с характерной для нарастания колебаний частотой, после чего обрабатывают такие параметры колебательного переходного процесса сигнала, полученного от передискретизации, как избыточное колебание, и/или собственная частота, и/или коэффициент затухания, чтобы оценить возможное ухудшение состояния изоляции.
Изобретение соответственно раскрывает устройство для выявления в онлайн-режиме ухудшения состояния изоляции электродвигателя, причем цепь питания электродвигателя включает преобразователь частоты переменного тока, а также, по меньшей мере, сенсорный датчик в подводке питания к двигателю, который фиксирует при подаче каскадного напряжения, по меньшей мере, в одном витке обмотки двигателя индуцированный ток или его временную утечку в виде сигнала измерения, причем с сенсорным датчиком соединено устройство передискретизации измерительного сигнала с более высокой частотой относительно переходных процессов, а полученные параметры передискретизации поступают на процессор для вычисления таких параметров переходного процесса при подаче каскадного напряжения, как избыточные импульсы, и/или собственная частота, или коэффициент затухания, для выявления возможного ухудшения состояния изоляции.
Предложенная технология выявления дефектов изоляции или выявления ухудшения состояния изоляции использует, таким образом, такие изменения в "отклике ступенчатого тока" на подаваемое каскадное напряжение, как собственная частота или интенсивность затухания, избыточные импульсы, а также для выявления фактических дефектов при мониторинге изоляции - параметры установившегося (стационарного) состояния, вызванные изменениями одного из элементов комплекса вышеназванной системы из-за (наступающего) дефекта. Каскадный отклик тока на включение преобразователя частоты переменного тока фиксируют сенсорные датчики тока или же датчики утечки тока, предпочтительно датчики, уже включенные в цепь питания электродвигателя. В этих условиях технологии оптимальна обработка параметров фазных токов, вследствие чего отпадает необходимость в специальных сенсорных датчиках. При этом можно взять за основу различные действия по включению преобразователя частоты переменного тока и фиксировать с относительно высокой частотой дискретизации, в диапазоне нескольких мГц (или MS/s) отклик системы на эти каскадные изменения напряжения, причем можно выявлять параметры изменения высокочастотных колебаний тока. Предпочтительнее использовать в качестве сенсорных датчиков т.н. датчики Роговского, которыми можно фиксировать временные утечки токов. Эти датчики Роговского называют также датчиками CDI (CDI - контролер производного потока). В ходе тестирования предпочтительнее показали себя дискретизации при частоте 40 мГц, в то время как частота индуцированных колебаний тока составляет, например, от 100 до 200 кГц.
Преимуществом данной технологии является также возможность фиксировать состояние изоляции между фазами и изоляции между витками отдельных фаз, не считая изоляцию между обмоткой и массой. В соответствующих сигналах фазного тока фиксируют отличия полного электрического сопротивления между преобразователем постоянного тока в переменный (преобразователь частоты переменного тока, инвертор) и двигателем, которые вызывают отражение волн напряжения с крутым фронтом на отдельных витках обмотки. Кроме этого преимуществом в этой связи является также возможность контролирования ухудшения состояния изоляции даже при наличии только одного электродвигателя, причем возможно выявить ухудшение изоляции мотков обмотки фазы в виде асимметрии изоляционных свойств путем сравнения параметров отдельных фазных токов соответствующего двигателя.
Для проведения вышеописанной высокочастотной дискретизации можно использовать, например, высокочастотные дискретизирующие аналого-цифровые преобразователи (далее сокращенно ADC), которые используют в дополнение к наименее затратным сенсорным датчикам тока или утечки тока.
Для (собственно) обработки данных можно использовать обычные, недорогие логические схемы или узлы ВМ, что обеспечивает чрезвычайно большую экономию затрат при выполнении изобретения.
Тем более, впервые данная технология позволяет выявлять дефекты изоляции обмотки уже на стадии их возникновения при наличии ослабления изоляции, изменения емкости изоляции, сопротивления, индуктивности и т.д. Как было отмечено выше, особо критичной является межобмоточная изоляция, а короткое замыкание между витками обмотки является особенно критичным дефектом, который требует особенно в случае больших двигателей моментального реагирования для предотвращения полного разрушения обмотки и пакетов сердечника. Изобретение может помочь решить эту проблему без значительных, ранее имевших место временных затрат с помощью специальной проводки между двигателем и преобразователем частоты переменного тока без требовавшихся ранее высокоточных датчиков тока и, в частности, без обычной остановки эксплуатации.
В качестве параметров колебательного переходного процесса в данной технологии используют, в частности, избыточные колебания или собственную частоту колебаний, причем в качестве альтернативы собственной частоте или как дополнение к ней можно использовать константу затухания переходных колебаний. С помощью этих параметров можно незамедлительно и надежно определить начало возникновения дефекта изоляции.
При этом для надежного выявления особенно предпочтительной оказалась возможность сравнения полученных параметров с соответствующими параметрами, полученными при более раннем процессе измерения на нормально работающем двигателе. Такое сравнение можно провести очень просто, и оно дает прямое указание на изменение отклика системы при различии сравниваемых параметров.
Кроме этого или вместо этого для простого выявления в онлайн-режиме предпочтительно сравнение полученных параметров с заданными пороговыми параметрами, при превышении которых речь идет о наличии дефекта. Заданные параметры могут быть заранее определены для каждого отдельного двигателя на основе простых расчетов или тестов, причем только при превышении пороговых значений можно сделать вывод о наличии начинающегося дефекта; тем самым можно исключить самопроизвольные индикации развивающихся дефектов в пределах допуска отклонений в параметрах. Например, можно при этом учитывать изменения параметров, вызванные рабочим нагревом оборудования.
Собственная частота может быть легко рассчитана через определение временной разницы между последовательными предельными значениями сигнала измерения. Аналогичным способом можно обнаруживать избыточные колебания как разницу между значением стационарного состояния и (первым) предельным значением в передискретизированном сигнале.
С помощью данной технологии можно выявлять и уже существующие, т.е. не только возникающие дефекты изоляции, причем предпочтительнее использование стационарного состояния сигнала в качестве параметра для выявления фактических дефектов изоляции. Кроме этого для простого выявления дефектов предпочтительно обнаружение параметра сигнала в стационарном состоянии в случае фиксирования временной утечки индуцированного тока в качестве последнего измеренного параметра при наложении постоянного напряжения. С другой стороны также предпочтительно выявление параметра сигнала в стационарном состоянии в случае непосредственной фиксации индуцированного тока двумя разнесенными параметрами дискретизации и определяемого ими нарастания сигнала.
Предпочтительная форма выполнения данного способа отличается тем, что несколько процессов измерения осуществляют с приложением каскадного напряжения и проводят статистическую оценку полученных результатов. Таким образом, можно получить больше характерной информации касательно выявления (начинающихся) дефектов и повысить точность их обнаружения.
Что касается настоящего устройства, то оно пригодно для облегчения идентификации, в частности, по меньшей мере, имея в своем составе компаратор для сравнения полученных данных с соответствующими сохраненными в памяти параметрами двигателя в режиме надлежащей эксплуатации и/или с предварительно заданным пороговым значением. К компаратору предпочтительно подключают блок обработки данных для обнаружения или идентификации ухудшения состояния изоляции и, при необходимости, дефектов изоляции.
Для ограничения по времени проводимых тестов в онлайн-режиме относительно важнейших процессов при запуске переходных процессов целесообразно предусмотреть промежуточную схему между устройством передискретизации и (собственно) вычислительным модулем с подключением промежуточной схемы через вход управления к блоку управления преобразователем частоты переменного тока и заданием паузы для измерения, начиная с сигнала управления блока управления, для передачи параметров передискретизации на дальнейшую обработку.
Как указано выше, вычислительный модуль может быть выполнен из обычных, недорогих конструктивных элементов, причем предпочтительнее выполнение, в частности, из компонентов FPGA (Field programmable gate array - Комбинационный элемент со свободным программированием). При необходимости его можно заменить или дополнить цифровым сигнальным процессором (DPS) для проведения, по меньшей мере, части вычислений.
Далее следует раскрытие изобретения на основе наиболее предпочтительных примеров его выполнения, которые, однако, не должны его ограничивать, с привлечением чертежей. На чертежах изображено:
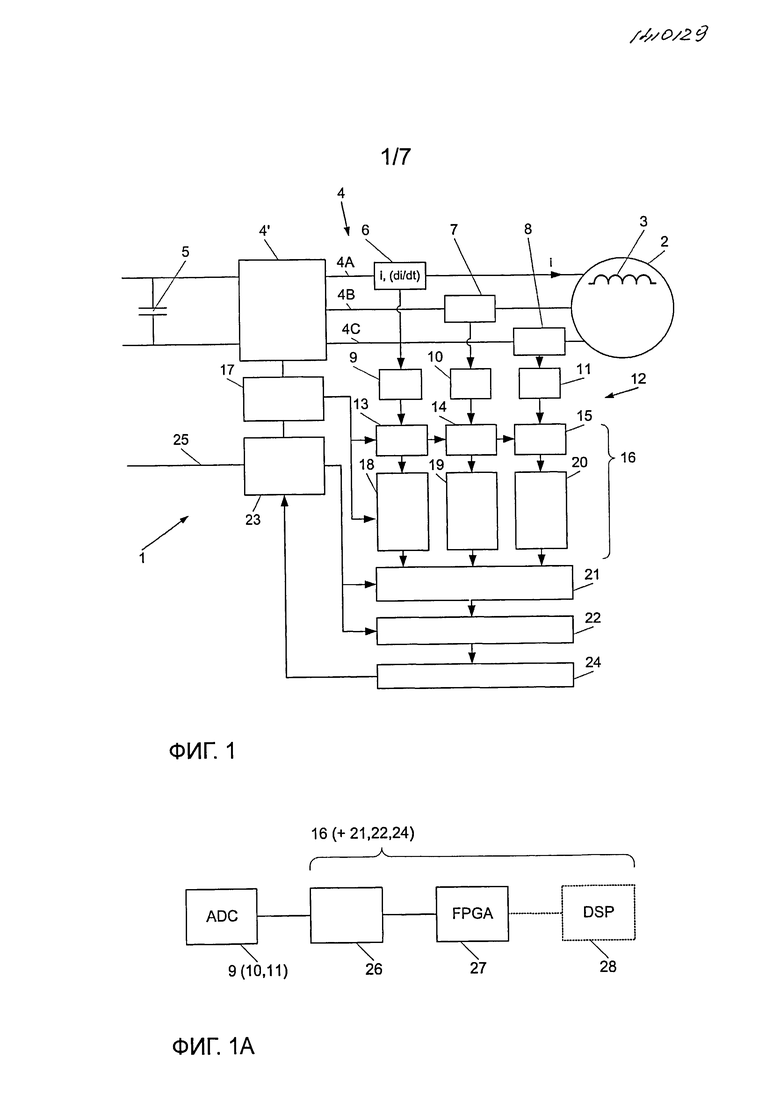
фиг.1 - блок-схема варианта выполнения устройства согласно данному изобретению;
фиг.1А - фрагмент схемы детектора или вычислительного модуля устройства, выполненной по конкретному, модифицированному варианту;
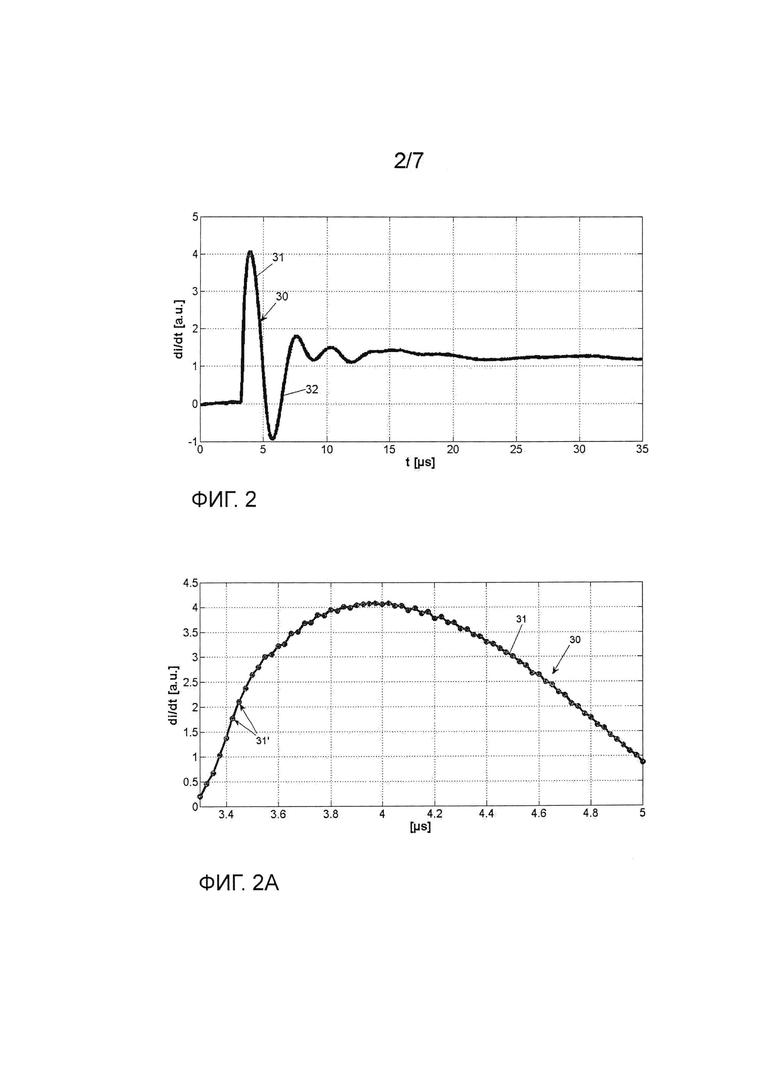
фиг.2 - схематическое изображение измерительного сигнала, получаемого сенсорным датчиком Роговского (датчиком CDI) и отображающего временную утечку индуцированного тока di/dt в любом из дискреционных элементов ("arbitrary units" - "a.u.");
фиг.2А - фрагмент сигнала di/dt по фиг.2 в растянутом масштабе времени для визуализации высокочастотных точек передискретизации этого сигнала в практическом соотношении высокой частоты передискретизации и частоты переходного процесса;
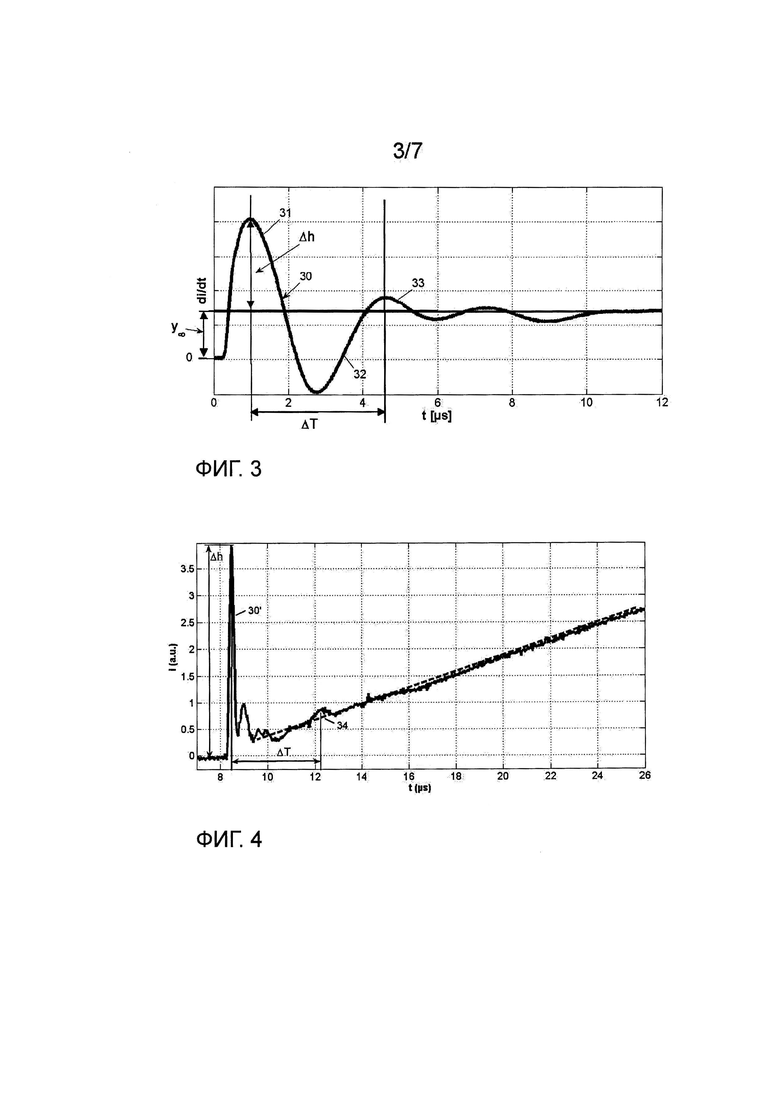
фиг.3 - сигнал, аналогичный сигналу согласно фиг.2, т.е. сигнал временной утечки индуцированного тока с указанием параметра ΔТ как параметра частоты собственного колебания, параметра избыточного колебания Δh и стационарного параметра Y,,;
фиг.4 - схема по времени аналогичного измерительного сигнала, получаемого обычным датчиком тока с указанием параметров Δh и ΔТ;
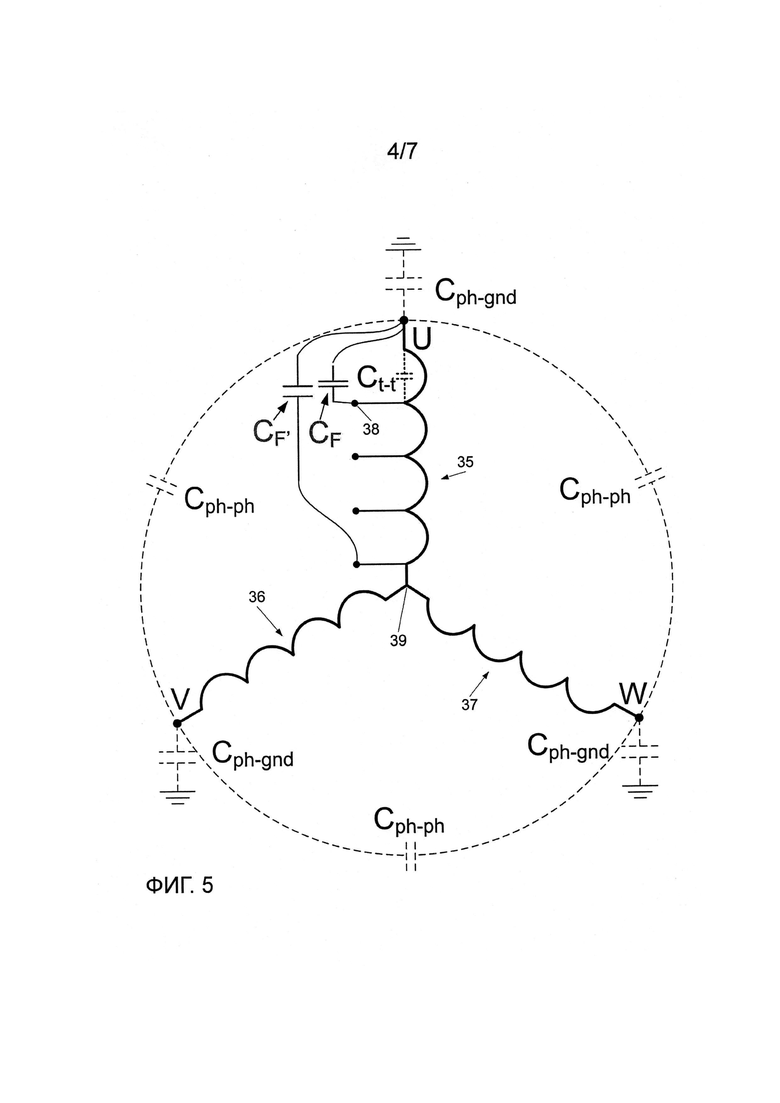
фиг.5 - схема расположения трех обмоток индукционной машины с двумя паразитными емкостями CF, CF', с одной стороны, между первым отводом фазной обмотки U и массой, а также, с другой стороны, между нейтральной точкой трех фазных обмоток U, V, W и массой;
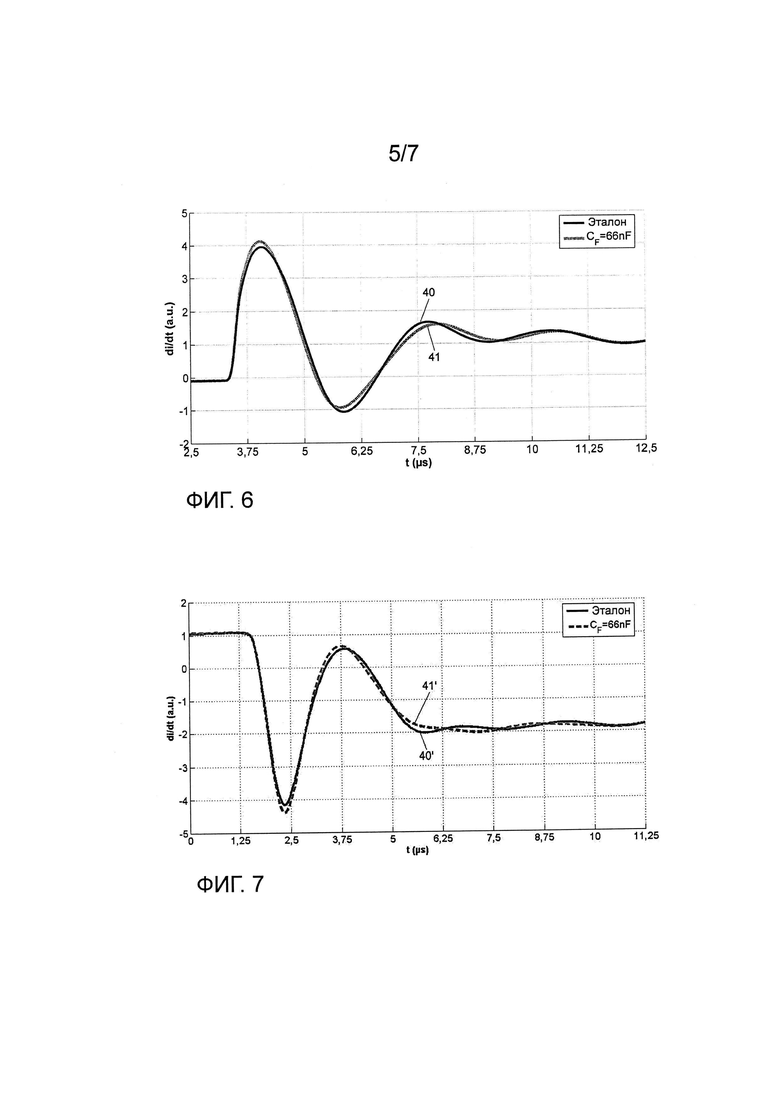
фиг.6 - отклик утечки тока, полученный при такой испытательной оснастке, с паразитной емкостью CF между первым отводом и массой и с отображением, как базисной кривой, так и кривой измерительного сигнала при наличии паразитной емкости, соответствующим переключению двигателя из неактивного состояния в активное;
фиг.7 - соответствующий сигнал di/dt по фиг.6 как базис, с одной стороны, и как "паразитный" сигнал измерения при наличии паразитной емкости CF, с другой стороны, но только при переключении с помощью преобразователя частоты переменного тока из активного состояния, с положительным параметром, в другое активное состояние с отрицательным параметром;
фиг.8 - диаграмма по фиг.6 с изображением измерительных сигналов независимо от базисного сигнала как при наличии паразитной емкости CF, так и при наличии паразитной емкости CF'; и
фиг.9А и 9B - схема диаграммы для визуализации статистического сигнала с параметрами измеренного переходного процесса включения избыточных колебаний (фиг.9А), с одной стороны, и собственной частоты (фиг.9B), с другой стороны, а также обозначенный далее пунктиром эталонный процесс при паразитной емкости CF' и паразитной емкости CF' со статистической обработкой 240 измерений.
На фиг.1 схематически изображен предпочтительный, особо пригодный для осуществления данного способа вариант выполнения устройства согласно изобретению для выявления в онлайн-режиме ухудшения состояния изоляции в электродвигателе.
Изображенное на фиг.1 устройство 1 предназначено для контроля в онлайн-режиме однофазного или многофазного электродвигателя 2 (индукционной машины), причем на фиг.1 приведен пример трехфазного двигателя, хотя схематически на фиг.1 изображена только одна обмотка 3 двигателя 2. На этот двигатель заведен контур электроснабжения или цепь 4 питания с тремя токовыми линиями 4А, 4В и 4С соответственно трем фазам; в эту цепь 4 питания включен преобразователь 4' частоты переменного тока, передающий соответствующий сигналы напряжения на двигатель 2; показан также подключенный к преобразователю 4' частоты переменного тока конденсатор 5 подключения к источнику постоянного тока.
В токовых линиях 4А, 4B и 4С расположены соответствующие датчики 6, 7, 8, которые в данном варианте настоящей технологии предназначены для фиксирования тока i или временной утечки тока di/dt в каждой из фаз 4А, 4B, 4С. В качестве датчиков утечки тока могут быть использованы, например, известные датчики Роговского или датчики CDI. С другой стороны, для этого могут быть также использованы датчики тока, дополнительно разъяснять которые нет необходимости.
Выходные сигналы датчиков 6, 7, 8 подают в качестве измерительных сигналов на устройство передискретизации 12, включающее аналого-цифровые преобразователи (ADC) 9, 10, 11 для каждой из фаз 4А, 4B, 4С. Высота частоты дискретизации достаточна при этом для точного определения измерительных сигналов в переходном процессе, во время коммутационных процессов. Как сказано выше, частота дискретизации может составлять несколько десятков мГц, например 40 мГц, но для некоторых целей достаточно уже нескольких мГц, например до 10 мГц.
Выходные сигналы аналого-цифровых преобразователей (ADC) 9, 10, 11 заводят на схемы 13, 14, 15 пауз вычислительного модуля 16, определяющие контрольные паузы, т.е. временные промежутки для обработки сигналов измерения после дискретизации. Для этого схемы 13, 14, 15 пауз соединены с блоком 17 управления преобразователя 4' частоты переменного тока, причем этот блок 17 управления является, например, блоком управления широтно-импульсной модуляцией (ШИМ) и выдает, как известно, на преобразователь 4' частоты переменного тока соответствующие сигналы коммутации. На основе этих сигналов коммутации и управления в схемах 13, 14, 15 пауз фиксируют соответствующую контрольную паузу, т.е. контрольный временной промежуток, причем при окончании соответствующей паузы заканчивается обработка, т.е. передача, параметров дискретизации датчиков ADC 9, 10 и 11 непосредственно на вычислительные компоненты 18, 19, 20.
Эти компоненты 18, 19, 20, т.е. собственно вычислительный модуль 16, обсчитывают параметры переходного процесса сигналов, т.е. конкретно токовых сигналов или сигналов, обозначающих временную утечку тока di/dt, в частности передискретизацию и собственную частоту или константу затухания. Кроме этого можно вычислить параметр сигнала в стационарном, т.е. в установившемся режиме.
В заключение полученные параметры заводят на компаратор 21 для сравнения с соответствующими параметрами, полученными ранее в процессе измерения на работающем в надлежащем режиме двигателе 2.
После этого в следующем компараторе 22 полученные параметры сравнивают с заданными пороговыми параметрами, которые могут быть сохранены, например, после их передачи через устройство 23 управления ВМ в блоке памяти (не показано). К устройству 23 управления ВМ может быть подключен и компаратор 21.
В анализаторе 24 после завершения сравнения происходит окончательный анализ сигналов, т.е. распознавание (начинающегося) дефекта и его идентификация, в частности, на основе предыдущих результатов сравнения.
В компараторе 21 при сравнении с параметрами двигателя 2 в надлежащем режиме выделяют изменения, зависящие от рабочих этапов, или асимметрию фаз. Любое другое отклонение фазного сигнала от нормы записывают и подвергают сравнению пороговых параметров в компараторе 22. Если параметр сигнала, т.е. его величина, превышает пороговое значение, в анализатор 24 поступает соответствующая информация об ошибке выявления и идентификации, а результат заводят, например, в устройство 23 управления ВМ для принятия соответствующих мер, например, начала аварийного режима или прекращения работы системы.
В устройство 23 управления ВМ поступает также 25 эталонный параметр управляемых процессов.
На фиг.1А упрощенно, в частности, для каждой отдельной обмотки изображена ветвь передискретизации и обработки сигналов, включая в.н. анализ и обработку сигналов. Отдельно показан аналого-цифровой конвертер, например ADC 9 (при необходимости и 10, 11), соединенный через буферный накопитель 26 с логическим модулем, выполненным в виде комбинационного элемента 27 со свободным программированием (FPGA). Буферный накопитель 26 предназначен для промежуточного сохранения высокочастотных выходных данных от ADC 9, так как FPGA-модуль 27, как правило, не может непосредственно обработать такого рода большой объем данных,
Как показано пунктиром на фиг.1А, для проведения текущих расчетов и анализа, если их не может провести логический FPGA-модуль 27, может быть подключен цифровой сигнальный процессор (DSP) 28.
Как сказано выше, можно выявлять изменения параметров высокочастотных колебаний тока с помощью различных манипуляций по переключению преобразователя частоты переменного тока и измерения системного отклика на эти каскадные изменения напряжения с крутым фронтом с применением высокочастотной дискретизации с частотой в несколько мГц.
На фиг.2 показан пример полученного с помощью датчика Роговского измерительного сигнала 30 di/dt с любыми дискреционными элементами („arbitrary units" - „a.u."). Как показано, система получает положительный импульс напряжения от преобразователя 4' частоты переменного тока (см. фиг.1) для перехода из неактивного состояния (начальный параметр 0), а индуцированный в соответствующей обмотке, например, в обмотке 3 по фиг.1 ток I или его временная утечка di/dt показывает кратковременный переходный процесс, после которого наступает колебательный переходный процесс, стационарное состояние, например, с параметром чуть выше 1 согласно фиг.1.
Измерительный сигнал 30 согласно фиг.2 получен, как сказано выше, с помощью датчика 6 (или 7, или 8), являющегося датчиком Роговского, при передискретизации, например, в данном случае с частотой дискретизации 40 мГц.
Эта передискретизация изображена схематично на фиг.2А, причем именно на фиг.2А показан первый положительный избыточный импульс 31 в растянутом временном масштабе (ср. фиг.2), а точки 31' визуализируют точки дискретизации. Как это видно, интенсивность или частота дискретизации значительно выше частоты переходного процесса, что показано, например, главным образом, положительным избыточным импульсом 31 и отрицательным избыточным импульсом 32 на фиг.2. Определяемая этими избыточными импульсами 31, 32 собственная частота может составлять, например, 200 кГц, в то время как указанная частота дискретизации в проведенных тестах составляла 40 мГц.
Измерение может быть проведено на неработающем двигателе 2, а также при запуске двигателя и во время работы двигателя, если при ШИМ-управлении двигателем 2 в отдельных приложенных импульсах напряжения получены соответствующие короткие переходные процессы 31, 32 обмоточного тока I или его временная утечка di/dt.
На фиг.3 изображен соответствующий измерительный сигнал 30 для di/dt, наложенный на время t, причем включение двигателя происходит приложением положительного скачка напряжения от любого начального параметра, например от параметра 0, а избыточный колебательный процесс выходит за пределы наступающего стационарного состояния у. Первый избыточный колебательный процесс (избыточный импульс 31) обозначен Δh.
После перехода колебаний в отрицательную область (избыточный импульс 32) снова происходит небольшой переход колебаний в положительную область при 33 с образованием периода ΔТ как противоположной собственной частоте величины. В показанном примере ΔТ составляет, например, примерно 3,5 мс, что соответствует собственной частоте 286 кГц.
Эту собственную частоту на примере показанного на фиг.3 протекания сигнала di/dt, наложенного на время t, полученного с помощью датчика Роговского, можно зафиксировать простым способом, т.е. рассчитать в вычислительных компонентах 18, 19. 20.
То же самое относится к переходному колебательному процессу Δh в качестве параметра между первой амплитудой при переходе через (окончательное) наступившее состояние Y,,.
В заключение можно измерить и наступившее состояние Y,,, т.е. окончательную стационарную величину Y,, с учетом того, что этот параметр изначально может быть получен усреднением измерительного сигнала для исправного двигателя 2 при приложении каскадного напряжения или же при наличии только короткого времени измерения.
Прежде чем перейти к подробному рассмотрению отдельных процессов обработки данных, необходимо рассмотреть альтернативный пример измерительного сигнала 30' на фиг.4, на которой изображен фактический ток i, зафиксированный датчиком 6, 7, 8, наложенный на время t, причем период ΔТ показан как противоположная собственной частоте величина переходного процесса, и показан избыточный импульс Δh. Для амплитуд также выбраны произвольные дискреционные элементы ("u.а"). На фиг.4 штрихпунктирной линией 34 с положительной крутизной показана средняя прямая измерительного сигнала 30', временная утечка которой характеризует стационарное состояние.
Далее перед рассмотрением конкретных результатов тестов по фиг.5 и следующим необходимо коротко рассмотреть расчет таких параметров, как собственная частота, избыточные колебания и стационарное состояние.
Собственная частота (1/ΔТ) отклика системы переходных процессов в токовом сигнале i(t) или в сигнале временной утечки di/dt может быть рассчитана с применением различных известных алгоритмов. Простым и эффективным методом, в частности, расчета фактического времени является определение распознаваемых в измерительном сигнале 30 или 30' предельных значений переходных процессов. Это можно осуществить, как указано выше, известным способом с применением, например, быстрых и надежных алгоритмов с получением непосредственного расчета собственной частоты.
Другим, более точным методом расчета является расчет собственной частоты с применением быстрого преобразования Фурье (FFT - БПФ - быстрое преобразование Фурье).
Точный отбор параметров соответствующей функции паузы также имеет значение; контрольную паузу целесообразно выбирать до начала наступившего состояния, однако она может быть и короче для сокращения обрабатываемых данных. Пауза может быть выбрана, например, чуть длиннее ΔТ.
На фиг.3 и фиг.4 показана обратная величина собственной частоты (f0) как ДТ для обоих датчиков (датчика CDI по фиг.3 и датчика абсолютного значения тока по фиг.4).
Те же самые методы, как и для расчета собственной частоты f0=1/ΔТ при определении предельных значений протекания переходного процесса тока или временной утечки di/dt тока с помощью быстрых, простых алгоритмов, можно применить для расчета параметров избыточного импульса сигнала. При прохождении сигнала согласно фиг.3 (временная утечка тока, di/dt) разница между первым предельным значением и стационарным состоянием характеризует первый избыточный импульс 31. На фиг.3 значение первого положительного избыточного импульса обозначено Δh (при применении датчика CDI). При использовании стандартных датчиков, измеряющих абсолютную величину тока по времени (см. фиг.4), видно, что затухание сигналов переходного процесса происходит почти по прямой. Поэтому сигнал стационарного сигнального состояния при наложении каскадного напряжения за рассматриваемый временной отрезок в несколько микросекунд не наступает. Во время активного включения ток за эту временную паузу непрерывно нарастает (см. сигнал 34) и только временная утечка тока переходит в стационарное состояние. Максимальное значение сигнала тока в переходном процессе включения по отношению к последней величине тока до изменения состояния включения может быть рассмотрено в качестве первого положительного избыточного импульса Δh (фиг.4).
При достаточно большой длительности скачка напряжения, в частности, достаточной для наступления стационарного состояния временной утечки тока, параметр Y,, стационарного состояния сигнала может быть определен достаточно просто. При наличии датчиков временной утечки тока (датчики Роговского) параметр стационарного состояния - это последний измеренный параметр при наложении постоянной ступени напряжения. Этого можно было бы добиться непосредственно без высокочастотного аналого-цифрового конвертера, причем точность сигнала может быть повышена при фиксировании параметра стационарного состояния путем усреднения нескольких подобных последних измеренных параметров.
При использовании датчиков прямого измерения тока интересующим параметром будет стационарное состояние крутизны кривой тока (см. мостик 34 кривой на фиг.4). В этом случае расчет может быть произведен, по меньшей мере, по двум параметрам тока, причем временное различие между обоими параметрами тока достаточно велико для возможности точного определения временной утечки тока, т.е. возрастания прямой 34 на фиг.4.
Преимуществом передискретизационного аналого-цифрового конвертера 9, 10, 11 является возможность применения технологии усреднения для повышения точности опознавания.
При ухудшении состояния изоляции параметр стационарного состояния не будет изменяться по сравнению с таким параметром исправного двигателя. Однако при возникновении короткого замыкания обмотки, т.е. короткого замыкания между витками, измерения показывают значительное изменение параметра стационарного состояния даже при коротком замыкании одной обмотки в одной единственной фазе.
Расчет параметра Y,, стационарного состояния подходит соответственно, в частности, для расчета уже существующего дефекта изоляции.
Были проведены практические тесты на 5,5 кВт-ной индукционной машине с короткозамкнутым ротором, причем были доступны отпайки различных витков трех обмоток двигателя. Соединением таких отпаек с соответствующим разъемом двигателя можно закоротить любое количество витков для симуляции еще не критичного для выхода из строя межобмоточного дефекта изоляции статора. Наличие дополнительной емкости, паразитной емкости CF вместо соединения напрямую между соответствующими разъемами симулирует ухудшение состояния изоляции между витками обмотки. Подобная практика схематически изображена на фиг.5, причем показаны три обмотки 35, 36, 37 соответственно фазам U, V, W. Пунктирными линиями показаны, с одной стороны, емкости между отдельными фазами, Cph-ph, и, с другой стороны, емкости между отдельными фазами и массой, Cph-gnd.
Пунктирной линией показана также емкость Ct-t в качестве обычной емкости между двумя соседними витками.
Дополнительно показаны две паразитные емкости CF, CF′, с одной стороны, емкость CF между первой отпайкой 38 обмотки 35 и разъемом фазы U, с другой стороны, паразитная емкость CF' между нейтральной точкой 39 и разъемом фазы U. Дополнительная емкость CF или CF' параллельно емкости обмотки, например Ct_t, повышает за счет изоляции обмотки (паразитную) емкость. Соответствующее возрастание емкости можно определить по ухудшению диэлектрических свойств изоляции. Во время тестов для более точной идентификации свойств системы изоляции индукционной машины были дополнительно определены емкости фаза-фаза Cph-ph как 500 пФ и емкость фаза-масса Cph-gnd как 1 нФ.
Тесты были проведены при передискретизации с частотой 40 мГц с помощью 16 битных аналого-цифровых конвертеров. Коммутация с FPGA-компонентом 27 осуществлена через буферный накопитель 26 (фиг.1А).
В первых тестах на фиг.5 была добавлена паразитная емкость CF между первой отпайкой 38 обмотки U и разъемом фазы.
На фиг.6 показано соответственно сохраненное прохождение сигнала, измеренного датчиком Роговского для временной утечки тока di/dt по кривой 41, причем также показана эталонная кривая 40 прохождения сигнала для исправного двигателя. Согласно изображению для обеих кривых 40 (эталонной) и 41 (с емкостью CF) прохождение сигнала имеет различия. Паразитная емкость составляла при этом, например, CF=66 пФ.
Из прохождения сигнала согласно фиг.6 также следует, что изменение емкости обмотки нельзя рассчитать, как ожидали, на основе параметров измерительного сигнала в стационарном состоянии, так как оба вида прохождения сигнала в наступившем состоянии дают идентичные показатели. Однако из фиг.6 следует явное различие в избыточных импульсах и собственной частоте. Это различие проявляется только, если вектор напряжения активного состояния коммутации указывает на ось фазы "ухудшенной" фазы U (в данном примере). Необходимо также упомянуть, что коммутационные переходные процессы, как это показало, имеют очень низкие статистические вариации. Любой из показанных на этих фигурах процесс прохождения сигнала соответствует среднему параметру, полученному на основе 240 измерений.
Для сравнения на фиг.7 показано прохождение сигнала - эталонного сигнала 40' и измерительного сигнала 41' - на случай, если с помощью преобразователя частоты переменного тока 4' осуществлен коммутационный процесс из активного состояния в положительном диапазоне в активное состояние в отрицательном диапазоне (например, от примерно +1 до примерно -2). В противоположность этому на фиг.6 показано прохождение сигнала 40, 41 в процессе коммутации преобразователя частоты переменного тока 4' из неактивного состояния 0 в активное состояние (стационарный параметр примерно +1).
На фиг.7 между первой отпайкой 38 обмотки 35 и разъемом фазы U также подключена паразитная емкость CF=66 nF. Здесь также однозначно показаны, с одной стороны, избыточный импульс прохождения сигнала 41' (сначала отрицательный, затем положительный) по сравнению с эталонным сигналом 40' и, с другой стороны, изменение собственной частоты в отношении сдвига временного интервала ΔТ.
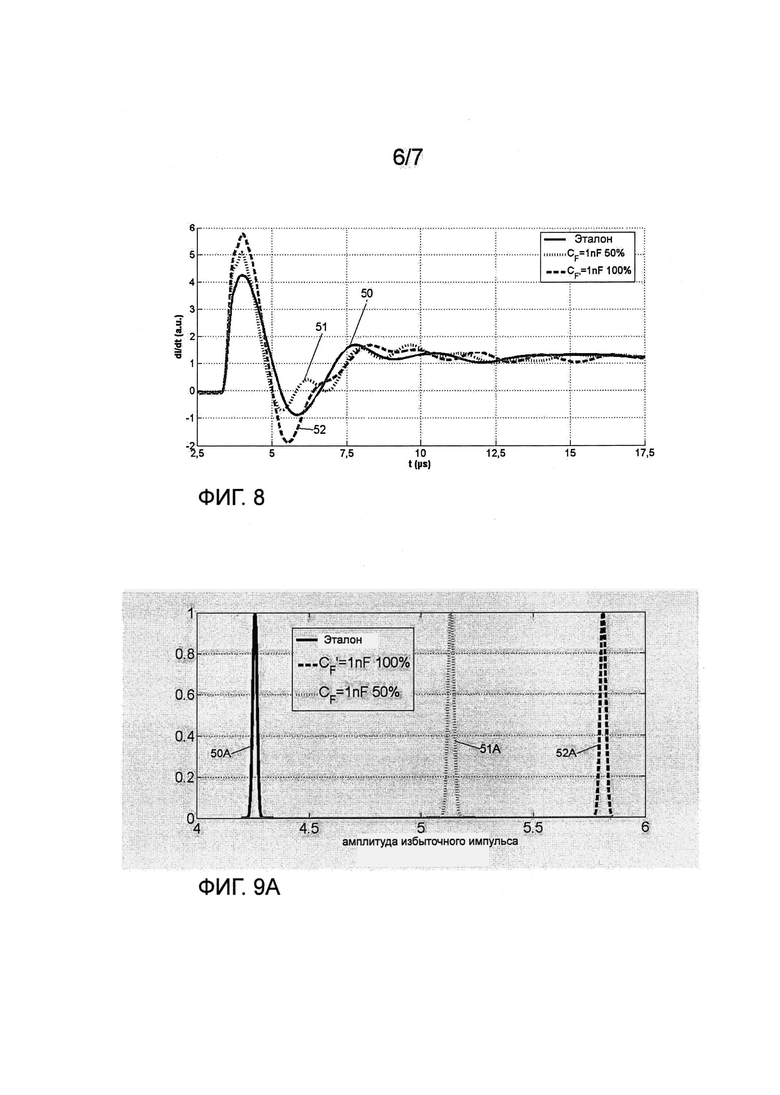
В другом тесте сравнимые измерения были проведены на дополнительно подключенной паразитной емкости CF между отпайкой в центре обмотки фазы U (50% короткого замыкания) или нейтральной точкой 39 и разъемом фазы (паразитная емкость CF', соответственно 100% короткого замыкания), причем паразитные емкости имели каждая по 1 нФ. На фиг.8 из соответствующих прохождений сигнала, также измеренного датчиками Роговского (датчики di/dt) и полученного после передискретизации с частотой 40 мГц, явно следуют различия между эталонным сигналом 50 и сигналом 51 при 50% короткого замыкания (паразитная емкость CF), а также между сигналом 25 при 100% короткого замыкания (паразитная емкость CF'). Как из этого также следует, при показанном прохождении сигналов с фиксированием изменений собственную частоту можно определить примерно после первого периода переходного процесса.
Для исследования надежности зафиксированных коммутационных переходных процессов были изучены статистические свойства сигналов датчиков. При этом, как указано выше, было проведено 240 измерений на каждой конфигурации двигателя или обмотки со сравнением результатов или параметров сигналов.
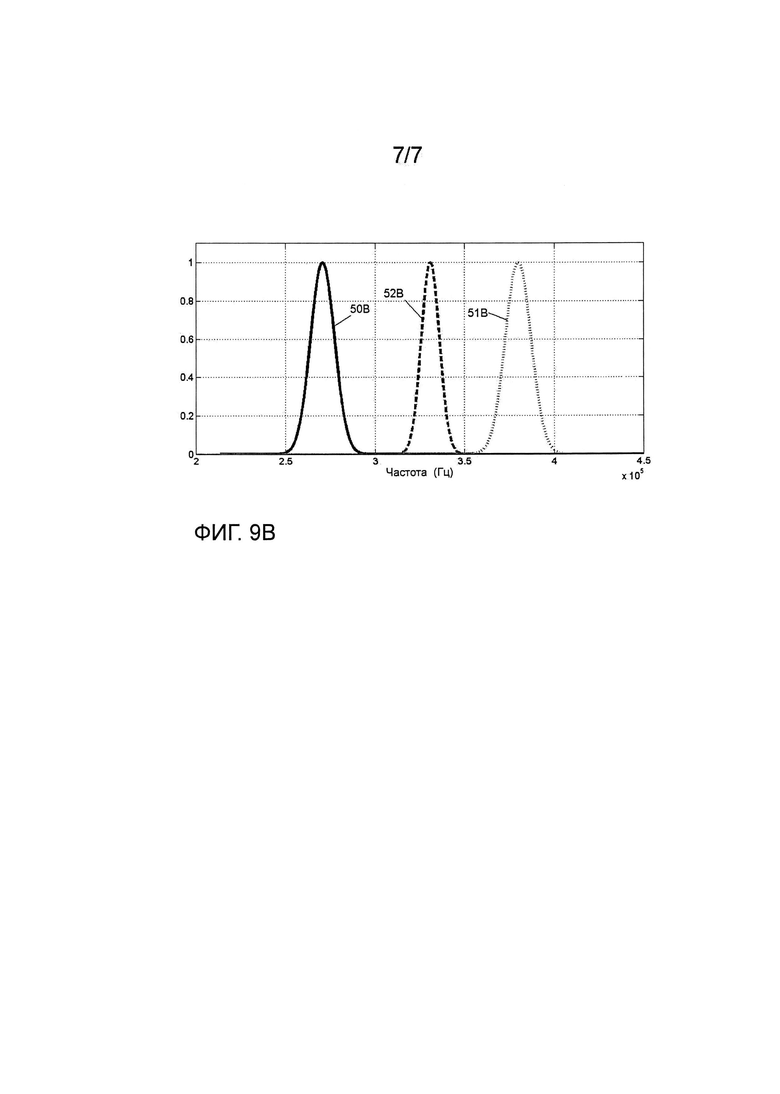
В соответствии с прохождением сигналов согласно фиг.8 на фиг.9А (относительно амплитуды избыточного импульса) и на фиг.9B (относительно частоты или собственной частоты) схематично изображена нормализованная плотность распределения вероятностей, полученная, как сказано выше, от коммутационных переходных процессов. Амплитуда передискретизации эталона (Δh на фиг.3) составляет примерно 4,3 (избыточный импульс 50А), первый избыточный импульс 51А для сигнала 51 показан на фиг.9А с амплитудой примерно больше 5, а первый избыточный импульс 52А в сигнале 52 показан на фиг.9А с амплитудой передискретизации примерно 5,8.
Что касается собственной частоты, то соответствующие частотные параметры 50В, 51В, 52В составляют на фиг.9B примерно 0,27 мГц для собственной частоты эталонной кривой 50, примерно 0,38 мГц для кривой сигнала 51 при 50% короткого замыкания и для 100% короткого замыкания, сигнал 52 на фиг.8 примерно 0,33 мГц (для 52 В).
При проведении тестов в качестве параметрических значений вместо сложных алгоритмов применяли простые математические методы определения избыточных импульсов и собственной частоты. Как следует из фиг.9А и 9B, вариантность полученных параметрических значений не велика, что обеспечивает возможность надежной и быстрой идентификации даже самых малых изменений емкости обмотки.
Как сказано выше, целесообразным считают получение параметрических значений сигналов в онлайн-режиме для текущего контроля состояния обмотки исправного двигателя 2, работающего в надлежащем режиме, например в фазе ввода в эксплуатацию. Однако в дальнейшем необходимо следить за тем, чтобы не вводить изменения в параметры сопротивления, индуктивности и емкости, например, после изменения проводки.
Также возможно определять в качестве основного параметра при измерениях константу затухания переходных собственных колебаний дополнительно или вместо собственной частоты 1/ΔТ. При этом можно, например, аппроксимировать с помощью простой показательной функции процесс затухания переходных собственных колебаний из величины и времени отдельных избыточных и субгармонических колебаний.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОНИТОРИНГА В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ РАБОЧЕГО СОСТОЯНИЯ ЕМКОСТНОГО ДАТЧИКА | 2015 |
|
RU2686522C2 |
| Система мониторинга и диагностирования состояния турбогенератора | 2023 |
|
RU2814856C1 |
| Система мониторинга и диагностирования состояния турбогенератора | 2023 |
|
RU2814857C1 |
| Устройство для регистрации ресурса машин | 1987 |
|
SU1569856A1 |
| СИСТЕМА И СПОСОБ УСТРАНЕНИЯ РЕЖИМА КОРОТКОГО ЗАМЫКАНИЯ НА ЗЕМЛЮ, КОТОРЫЙ МОЖЕТ ВОЗНИКНУТЬ В СИСТЕМЕ ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2395146C2 |
| СИСТЕМА МОНИТОРИНГА, ДИАГНОСТИРОВАНИЯ И УПРАВЛЕНИЯ ТЕХНИЧЕСКИМ СОСТОЯНИЕМ СИЛОВЫХ ТРАНСФОРМАТОРОВ | 2022 |
|
RU2791597C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2007 |
|
RU2341805C1 |
| УСТРОЙСТВО КОНТРОЛЯ ИЗОЛЯЦИИ СЕТИ ПОСТОЯННОГО ТОКА И ПОИСКА МЕСТ УХУДШЕНИЯ ИЗОЛЯЦИИ | 2004 |
|
RU2284537C2 |
| Способ контроля технического состояния датчика прямого заряда системы внутриреакторного контроля ядерного реактора | 2022 |
|
RU2783505C1 |
| СПОСОБ ИЗМЕРЕНИЯ СОПРОТИВЛЕНИЯ ИЗОЛЯЦИИ ПРИСОЕДИНЕНИЙ В РАЗВЕТВЛЕННЫХ СЕТЯХ ПОСТОЯННОГО ТОКА | 2008 |
|
RU2363960C1 |
Изобретение относится к выявлению в онлайн-режиме ухудшения состояния изоляции электродвигателя. Сущность: с помощью преобразователя на обмотку (обмотки) двигателя накладывают каскадное напряжение. Фиксируют индуцированный им ток (i) и/или его временную утечку (di/dt) в качестве измерительного сигнала с помощью датчика (6, 7, 8). Затем передискретизируют его с более высокой по сравнению с характерной для собственного колебания частотой. После чего полученный передискретизацией сигнал анализируют относительно таких параметрических значений переходного процесса, как избыточный импульс (Δh), и/или собственная частота (1/ΔТ), и/или константа затухания, для выявления возможного ухудшения состояния изоляции. Технический результат: надежность выявления в онлайн-режиме ухудшения состояния изоляции при наименьших аппаратных затратах. 2 н. и 13 з.п. ф-лы, 9 ил.
1. Способ выявления в онлайн-режиме ухудшения состояния изоляции электродвигателя (2), в котором с помощью преобразователя (4') частоты колебаний переменного тока на обмотку(и) (3) двигателя (2) заводят каскадное напряжение и фиксируют вызванный им ток (i) и/или его временную утечку (di/dt) в качестве измерительного сигнала с помощью, по меньшей мере, датчика (6, 7, 8) и затем передискретизируют его с более высокой по сравнению с характерной для собственного колебания частотой, после чего полученный передискретизацией сигнал анализируют относительно таких параметрических значений переходного процесса, как избыточный импульс (Δh), и/или собственная частота (1/ΔТ), и/или константа затухания для выявления возможного ухудшения состояния изоляции.
2. Способ по п. 1, отличающийся тем, что полученные с помощью анализа параметрические значения сравнивают со значениями, полученными соответственно во время более ранних измерений на работающем в надлежащем режиме двигателе.
3. Способ по п. 2, отличающийся тем, что полученные параметрические значения сравнивают с заданными пороговыми значениями, при превышении которых принимают решение о наступлении аварийного состояния.
4. Способ по п. 1, отличающийся тем, что собственную частоту (1/ΔТ) рассчитывают по временной разнице между последовательными передискретизированными предельными значениями измерительного сигнала.
5. Способ по п. 1, отличающийся тем, что избыточный импульс (Δh) рассчитывают как разницу между значением в стационарном состоянии и предельным значением, в данном случае первым, сигнала.
6. Способ по п. 1, отличающийся тем, что в качестве параметрической величины для выявления фактических дефектов изоляции используют стационарное состояние Y,, сигнала.
7. Способ по п. 6, отличающийся тем, что значение (Y,,) сигнала в стационарном состоянии в случае фиксирования временной утечки индуцированного тока рассчитывают в качестве последнего значения при наложении постоянного напряжения.
8. Способ по п. 6, отличающийся тем, что значение (Y,,) сигнала в стационарном состоянии в случае непосредственного фиксирования индуцированного тока рассчитывают по двум отстоящим значениям дискретизации и определяемому ими нарастанию сигнала.
9. Способ по п. 1, отличающийся тем, что проводят несколько измерений с наложением каскадного напряжения и статистический анализ полученных результатов.
10. Устройство для выявления в онлайн-режиме ухудшения состояния изоляции электродвигателя, причем электродвигатель (2) снабжен цепью (4) питания с преобразователем (4') частоты колебаний переменного тока, а также, по меньшей мере, датчиком (6, 7, 8) в электропроводке (4А, 4В, 4С) двигателя (2), причем посредством датчика (6, 7, 8) фиксируется в качестве измерительного сигнала индуцированный в обмотке (3) двигателя (2) при наложении каскадного напряжения ток (i) или его временная утечка, причем датчик (6, 7, 8) соединен с устройством (12) передискретизации измерительного сигнала со сравнительно высокой относительно переходных процессов частотой, а полученные параметры дискретизации заводятся на вычислительный модуль (16) для расчета таких параметрических значений переходного процесса при наложении каскадного напряжения, как избыточный импульс (Δh), и/или собственная частота (1/ΔТ), и/или константа затухания, для выявления возможного ухудшения состояния изоляции.
11. Устройство по п. 10, отличающееся тем, что имеется, по меньшей мере, один анализатор (21, 22) для сравнения полученных параметрических значений с соответствующими записанными в памяти параметрами двигателя, работающего в надлежащем режиме, и/или с заданными пороговыми значениями.
12. Устройство по п. 11, отличающееся тем, что к анализатору (21, 22) подключен блок (24) обработки результатов для выявления и идентификации ухудшения состояния изоляции и, при необходимости, дефектов изоляции.
13. Устройство по п. 10, отличающееся тем, что имеется схема (13, 14, 15) пауз между устройством (12) передискретизации и собственно вычислительным модулем (16), причем схема (13, 14, 15) пауз подключена через вход управления к блоку (17) управления преобразователем частоты переменного тока и с возможностью определения заданной контрольной паузы, начиная с сигнала управления блока (17), во время которой параметры дискретизации передаются на дальнейшую обработку.
14. Устройство по п. 10, отличающееся тем, что вычислительный модуль (16) выполнен с комбинационным элементом (FPGA) (27) со свободным программированием.
15. Устройство по п. 10, отличающееся тем, что вычислительный модуль (16) имеет цифровой сигнальный процессор (DSP) (28).
| СПОСОБ КОНТРОЛЯ ВИТКОВОЙ ИЗОЛЯЦИИ ОБМОТОК ЭЛЕКТРИЧЕСКИХ МАШИН И АППАРАТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2035744C1 |
| СПОСОБ КОНТРОЛЯ ЭЛЕКТРОТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕКТРИЧЕСКИХ МАШИН | 2004 |
|
RU2274869C2 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ИЗОЛЯЦИИ ОБМОТОК ЭЛЕКТРОДВИГАТЕЛЯ | 2001 |
|
RU2208234C2 |
| JP 2005037351 A, 10.02.2005 | |||
| JPS 57153271 A, 21.09.1982 | |||
| JP 2007108057 A, 26.04.2007.. | |||

