Область техники
В процессе бурения и добычи углеводородов в попытке обнаружения источников нефти под землей определяют различные свойства толщ пород путем спуска измерительных приборов в пробуренный ствол скважины. Например, с целью определения таких свойств, как плотность породы пласта, в стволах скважин измеряют гравитационное поле. С геофизической точки зрения успех мониторинга толщ пород определяется высокой точностью и повторяемостью результатов скважинных исследований.
Уровень техники
Одним из применений результатов скважинных гравиметрических исследований при определении параметров продуктивного пласта является оценка объемной плотности и определение пористости и насыщенности флюидом. Скважинные гравиметры способны осуществлять измерения через перфорированную обсадную колонну и на удалении от ствола скважины. Тем не менее, для таких измерений требуются сложные технологии (точные датчики, точное определение местоположения прибора и т.п.). В результате, возникают ошибки при определении положения прибора и/или глубины, например, из-за перемещения прибора, вызывающего колебания глубины на протяжении многократных измерений. Возникают дополнительные сложности, связанные с инверсией данных скважинных гравиметрических исследований. При использовании традиционных методов инверсии определяют так называемую кажущуюся плотность, которая может значительно отличаться от истинной объемной плотности, в особенности, когда собранные данные загрязнены шумом.
Краткое изложение сущности изобретения
Предложен способ определения геологии толщи пород, включающий: прием данных гравиметрических исследований от каждого из множества гравиметрических датчиков  , упорядоченно сгруппированных по длине ствола скважины в толще пород, генерирующих данные gj гравиметрического исследования, соответствующие местоположению
, упорядоченно сгруппированных по длине ствола скважины в толще пород, генерирующих данные gj гравиметрического исследования, соответствующие местоположению  , и разделенных интервалом h,
, и разделенных интервалом h,
генерирование модели толщи пород, содержащей приблизительные геологические границы Nm, имеющие приблизительную глубину  и определяющие число слоев в геологическом разрезе между ними,
и определяющие число слоев в геологическом разрезе между ними,
допущение (принятие) того, что каждая геологическая граница представлена минимальным изменением плотности, а каждый из слоев в геологическом разрезе имеет толщину, охватываемую двумя или более из множества датчиков  , и
, и
определение местоположения и изменения Δρ плотности геологической границы z между местоположениями  и
и  , исходя из данных gj гравиметрических исследований и интервала h.
, исходя из данных gj гравиметрических исследований и интервала h.
Предложен компьютерный программный продукт, содержащий машиночитаемые команды, хранящиеся на машиночитаемом носителе и служащие для определения свойства толщи пород путем реализации способа, включающего:
прием данных гравиметрических исследований от каждого из множества гравиметрических датчиков , сгруппированных по длине ствола скважины в толще пород, генерирующих данные gj гравиметрического исследования, соответствующие местоположению  , и разделенных интервалом h,
, и разделенных интервалом h,
генерирование модели толщи пород, содержащей приблизительные геологические границы Nm, имеющие приблизительную глубину и определяющие число слоев в геологическом разрезе между ними,
допущение того, что каждая геологическая граница представлена минимальным изменением плотности, а каждый из слоев в геологическом разрезе имеет толщину, охватываемую двумя или более из множества датчиков , и
определение местоположения и изменения Δρ плотности геологической границы z между местоположениями  и
и  , исходя из данных gj гравиметрических исследований и интервала h.
, исходя из данных gj гравиметрических исследований и интервала h.
Краткое описание чертежей
Описанные далее чертежи не следует считать ограничивающими изобретение каким-либо образом. На сопровождающих описание чертежах одинаковые элементы обозначены одинаковыми позициями, и:
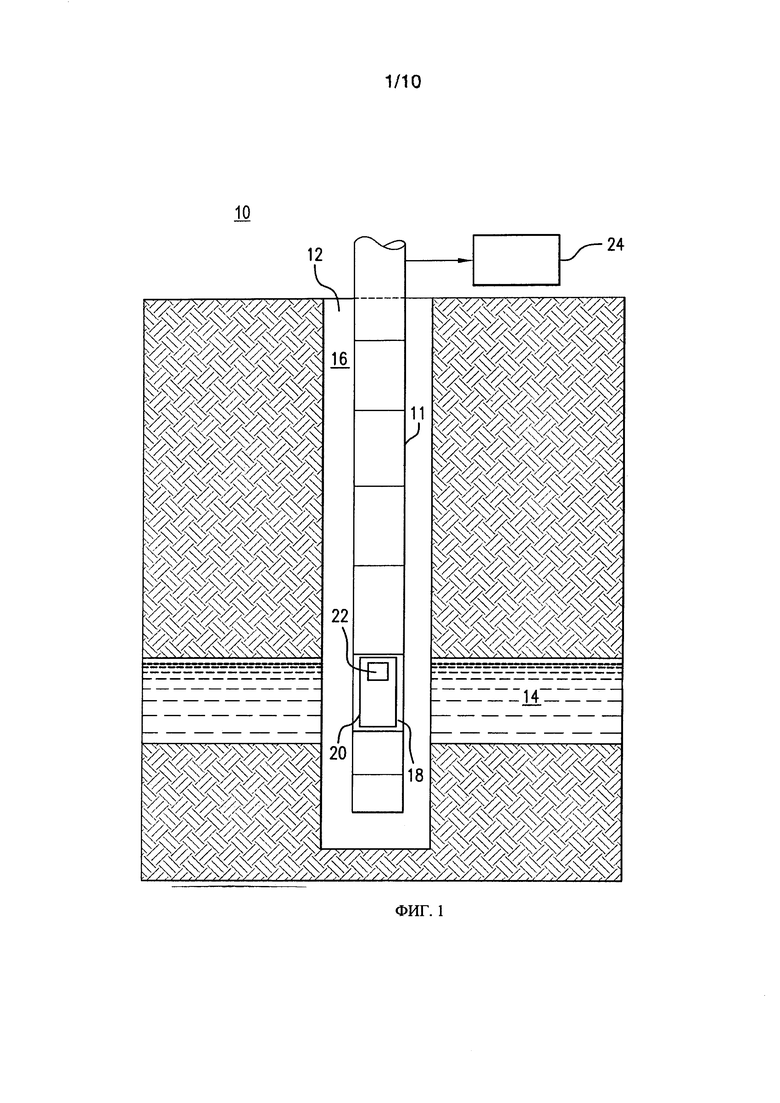
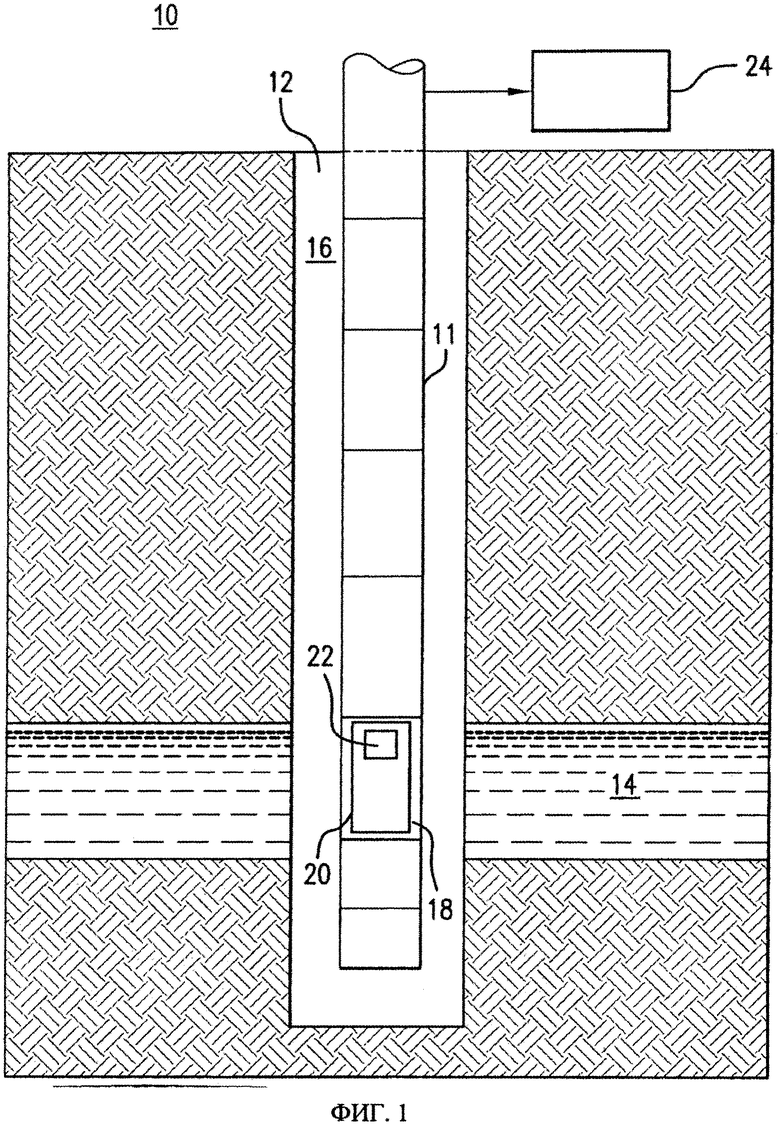
на фиг. 1 проиллюстрирован один из вариантов осуществления системы каротажа и/или бурения,
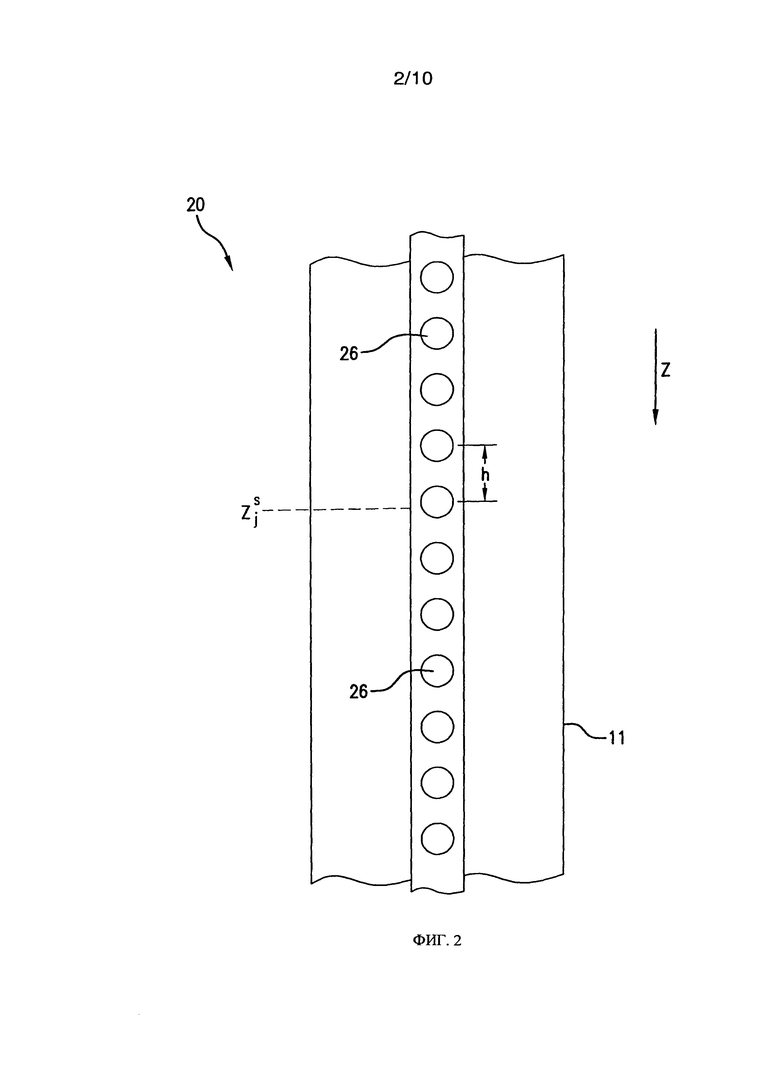
на фиг. 2 - один из примеров компоновки измерительных приборов проиллюстрированной на фиг. 1 системы, содержащей группу гравиметрических датчиков,
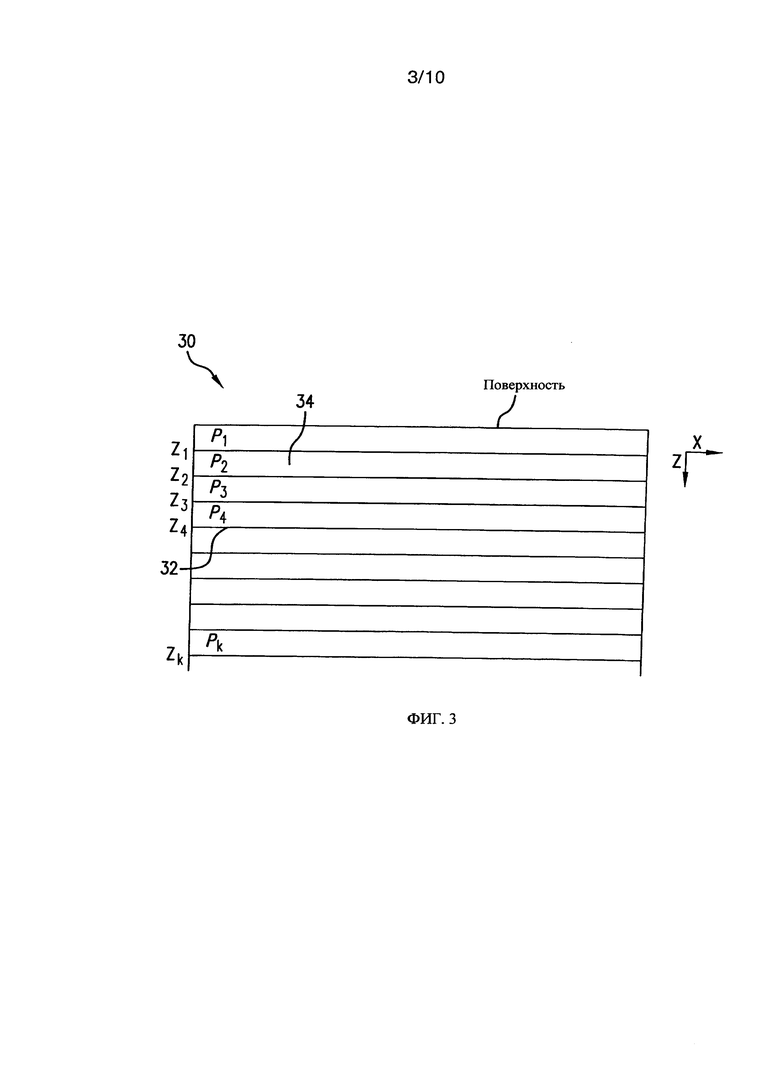
на фиг. 3 - один из примеров модели толщи пород,
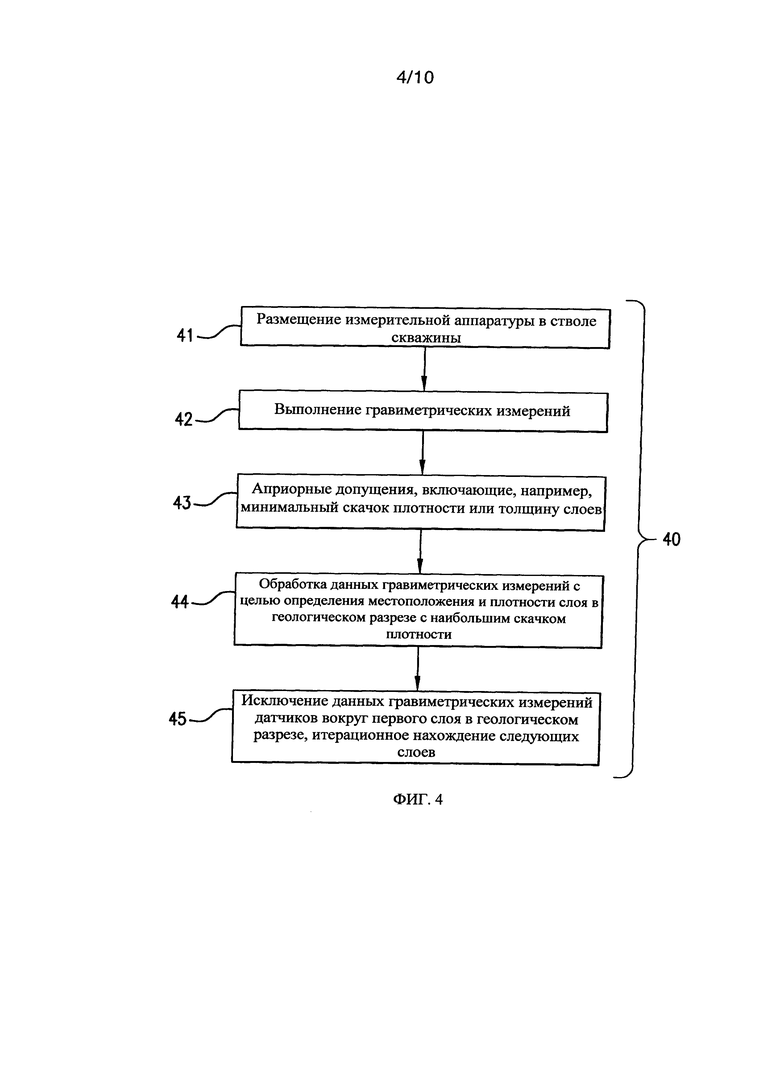
на фиг. 4 - блок-схема, представляющая один из примеров способа определения свойств толщи пород, включая плотность и местоположение геологических границ,
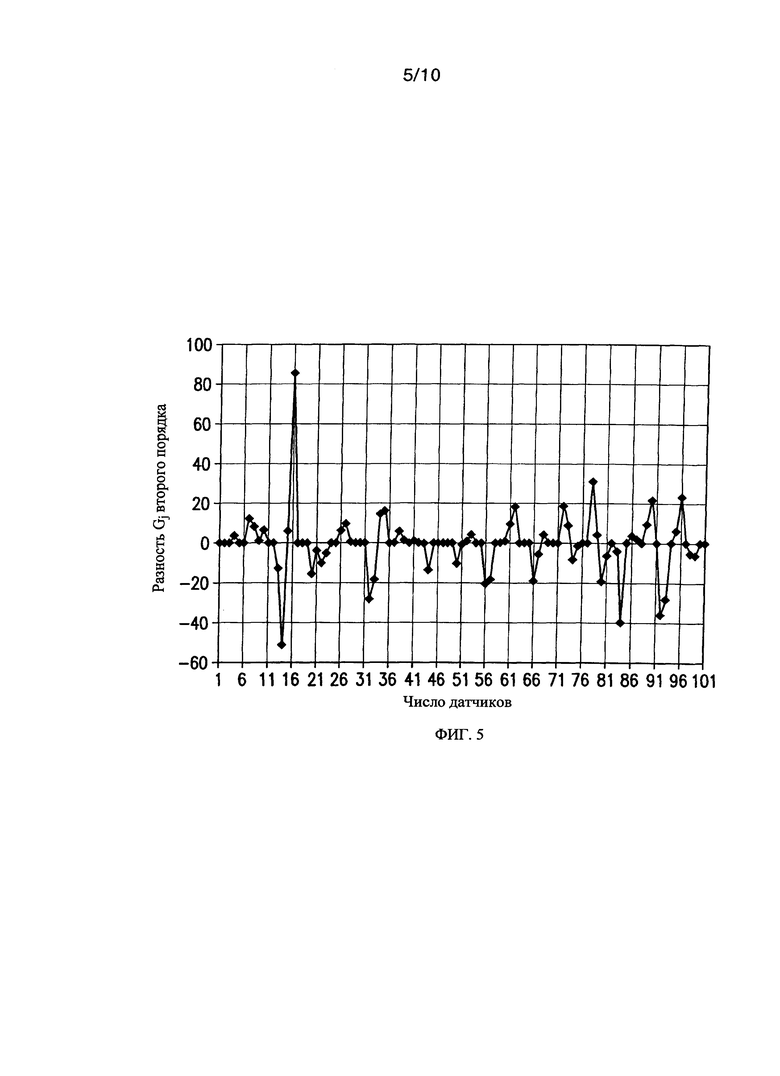
на фиг. 5 - один из примеров графика данных, генерированных на основании гравиметрических исследований,
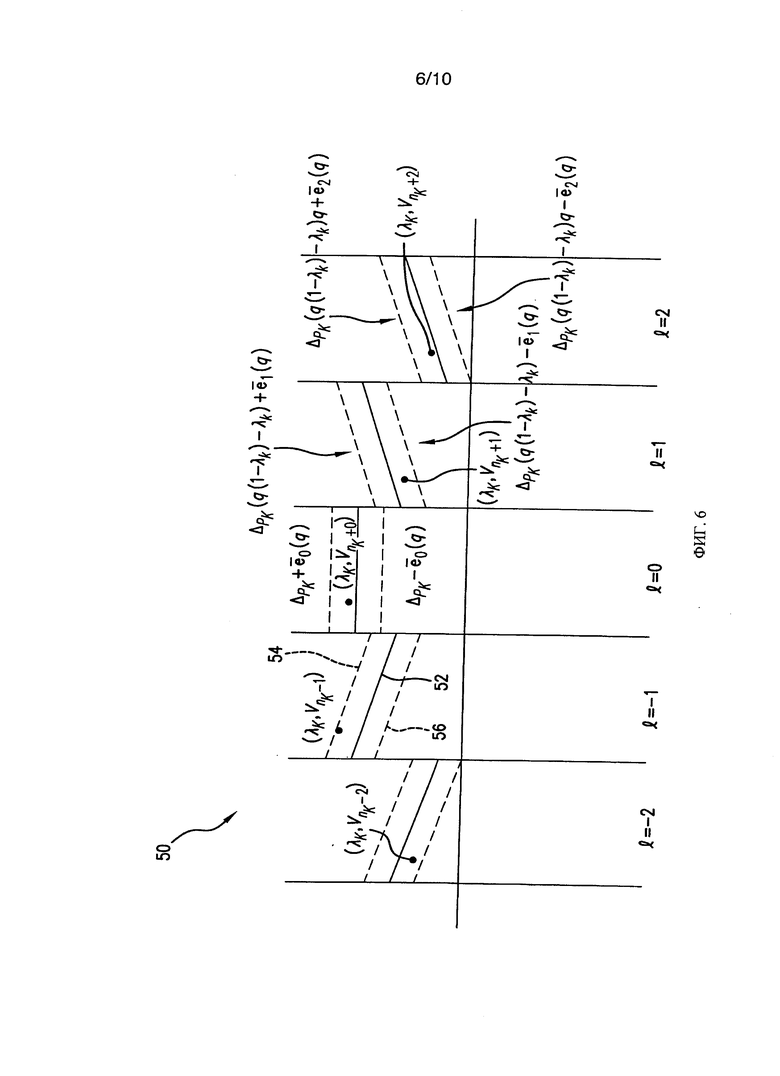
на фиг. 6 - часть способа определения геологической границы относительно местоположения скважинного датчика,
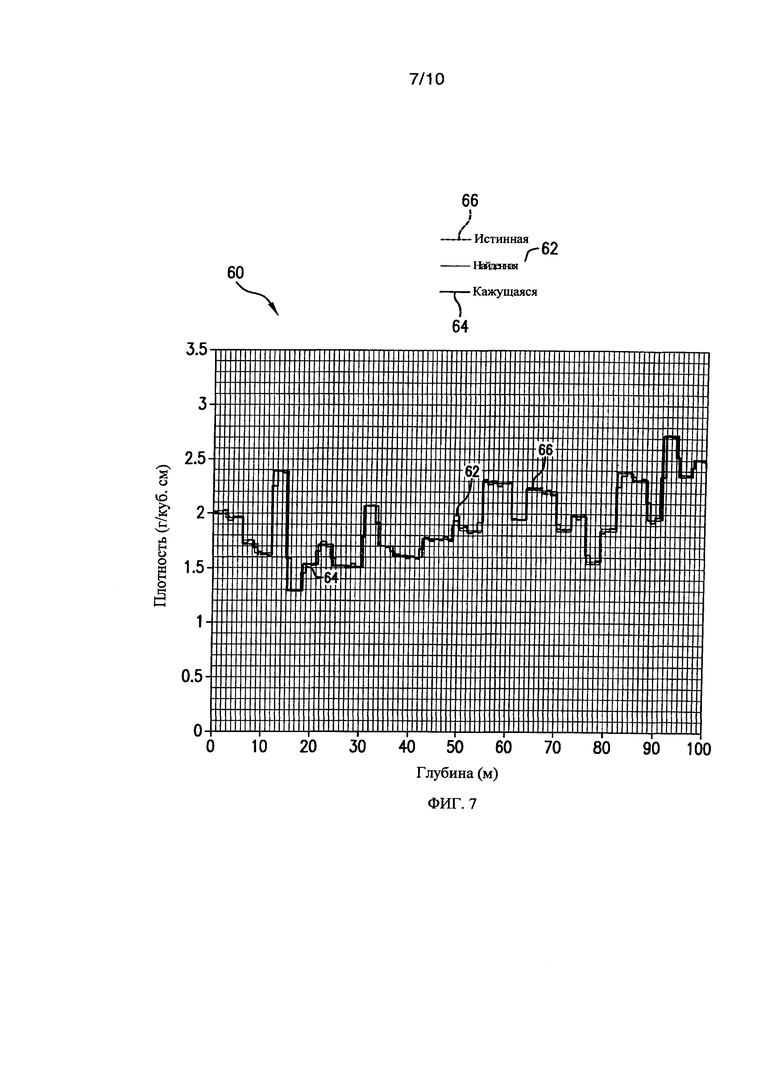
на фиг. 7 - один из примеров графика данных плотности, иллюстрирующих сравнение способа инверсии данных гравиметрических исследований и известного способа определения кажущейся плотности,
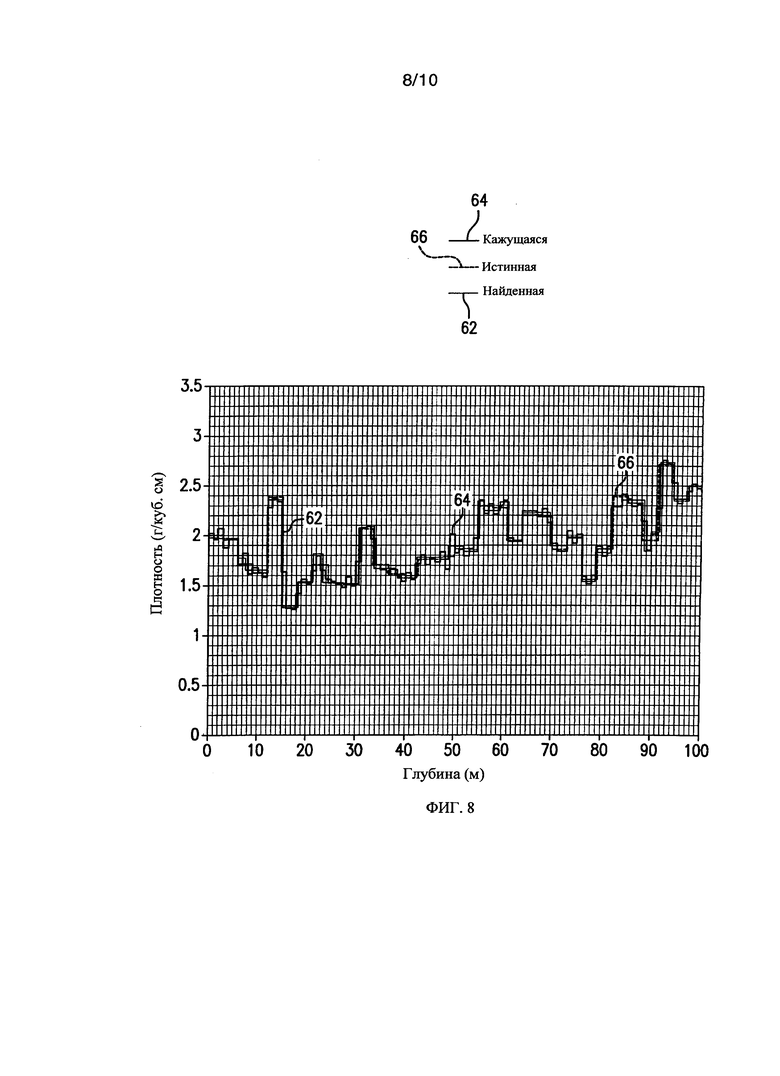
на фиг. 8 - один из примеров графика данных плотности, иллюстрирующих сравнение способа инверсии данных гравиметрических исследований и известного способа определения кажущейся плотности,
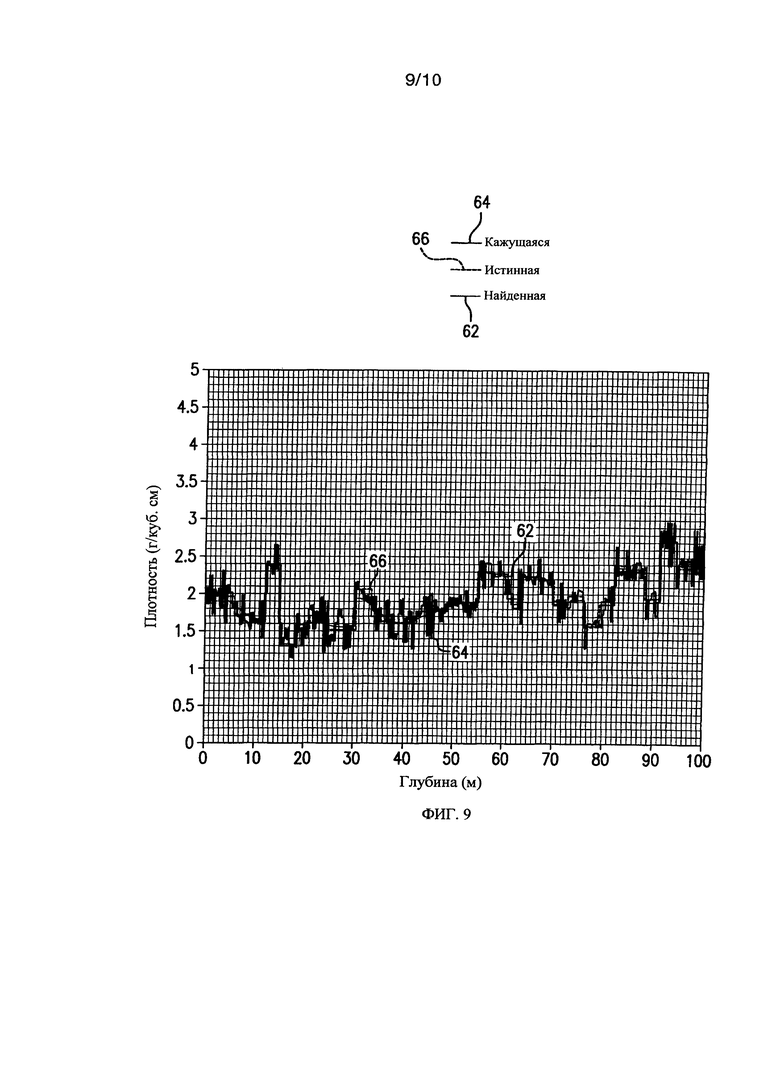
на фиг. 9 - один из примеров графика данных плотности, иллюстрирующих сравнение способа инверсии данных гравиметрических исследований и известного способа определения кажущейся плотности, и
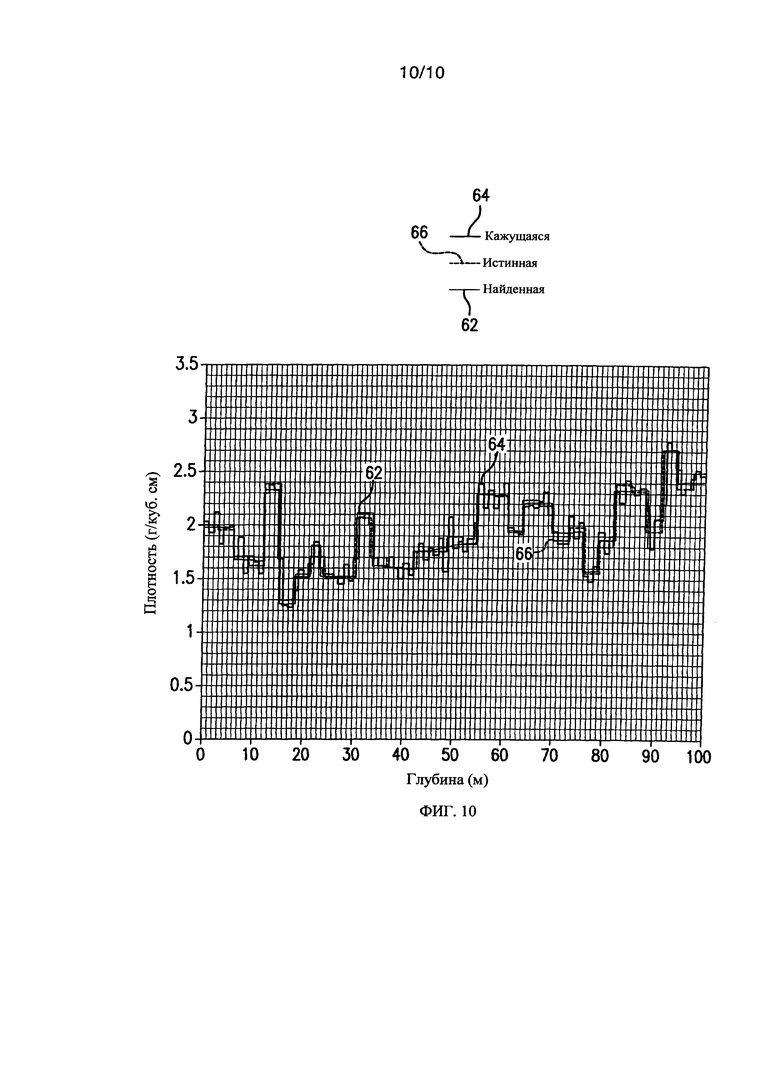
на фиг. 10 - один из примеров графика данных плотности, иллюстрирующих сравнение способа инверсии данных гравиметрических исследований и известного способа определения кажущейся плотности.
Подробное описание
В изобретении предложены системы и способы определения параметров плотности в толще пород. Способ включает анализ данных гравиметрических исследований, полученных от группы скважинных гравиметрических датчиков, с целью определения местоположений геологических границ в толще пород, исходя из расчетных местоположений изменений или "скачков" плотности. В одном из вариантов осуществления способ включает генерирование модели, содержащей одну или несколько приблизительных границ. Могут делаться различные априорные допущения, такие как допущение того, что скачок плотности на границе является высоким и что слои в геологическом разрезе являются толстыми относительно распределения датчиков (например, по меньшей мере по три датчика на слой). Способ позволяет точно определять границы, указывающие слои в геологическом разрезе, а также отличать пики данных, соответствующие слоям в геологическом разрезе, от пиков вследствие погрешностей измерений.
Как показано на фиг. 1, в систему 10 каротажа, добычи и/или бурения согласно одному из примеров осуществления входит колонна 11 труб, находящаяся в стволе 12 скважины по меньшей мере в одной толще 14 пород в процессе бурения, каротажа и/или добычи углеводородов. В одном из вариантов осуществления колонна 11 содержит бурильную трубу, которая может представлять собой трубу из одной или нескольких секций или спиральные насосно-компрессорные трубы. В одном из вариантов осуществления в систему 10 также входит компоновка 18 низа бурильной колонны (КНБК). Скважинный флюид 16, такой как раствор для бурения или заканчивания скважины или буровой раствор, может закачиваться через бурильную колонну 11, КНБК 18 и/или ствол 12 скважины.
КНБК 18 или другая часть колонны 11 труб содержит компоновку 20 измерительных приборов, сконфигурированную на определение по меньшей мере одного свойства толщи 14 пород и/или ствола 12 скважины. В одном из вариантов осуществления в компоновку 20 входит устройство 22 обработки данных для обработки и/или представления данных, касающихся по меньшей мере одного свойства. В одном из вариантов осуществления устройство 22 обработки данных и/или компоновка 20 измерительных приборов входит в наземное устройство 24 обработки или поддерживает с ним связь. В КНБК 18 и/или компоновку 20 измерительных приборов входят любые из различных передающих сред и соединений, такие как проводные соединения, оптоволоконные соединения, беспроводные соединения и телеметрия по гидроимпульсному каналу связи.
В одном из вариантов осуществления устройство 22 обработки данных и/или наземное устройство 24 обработки содержит компоненты, необходимые для обеспечения хранения и/или обработки данных, поступающих от компоновки 20. примеры компонентов включают без ограничения по меньшей мере один процессор, запоминающее устройство, память, устройства ввода, устройства вывода и т.п. В одном из вариантов осуществления устройство 22 обработки данных и/или наземное устройство 24 обработки сконфигурировано как блок управления работой компоновки измерительных приборов и/или других компонентов системы 10.
Как показано на фиг. 2, в компоновку 20 измерительных приборов входит множество датчиков 26, сгруппированных по длине колонны 11 и/или ствола 12 скважины, при этом каждый датчик них смещен на фиксированный интервал "h" от другого датчика. В одном из вариантов осуществления датчики 26 сконфигурированы как гравиметры для измерения ускорения силы тяжести, которое равно градиенту гравитационного потенциала. Гравиметры часто используются для двухмерного отображения ускорения при гравитационной съемке. Могут использоваться любые применимые гравиметры, включая различные пружинные гравиметры и сверхпроводящие гравиметры. Гравиметры могут включать абсолютные гравиметры и относительные элементные гравиметры, которые используются в сочетании с одним или несколькими эталонными гравиметрами, расположенными на удалении от относительного гравиметра.
В одном из вариантов осуществления компоновка 20 измерительных приборов сконфигурирована как скважинный абсолютный гравиметр с множеством датчиков (САГМД), сгруппированных по длине ствола 12 скважины, который также именуется g-колонной или g-группой. В g-группу входят два или более абсолютных гравиметрических датчика, разнесенных на фиксированный интервал h друг от друга.
Описанные способы обработки данных могут применяться в сочетании с моделью толщи пород, в которой могут содержаться различные допущения, а также предварительные или приблизительные местоположения границ слоев в геологическом разрезе. На фиг. 3 представлен один из примеров модели 30, описываемой как модель горизонтально-слоистой среды. В этой модели zk, k=1,…,N означают глубины залегания границ 32, определяющих моделируемые слои 34 в геологическом разрезе, а ρk, k=1,…,N-1 означают плотности слоев; т.е. плотность ρ=ρ(z) является кусочно постоянной функцией, при этом ρ(z)=ρk при zk≤z<zk+1. Геологическая граница может определяться как глубина, на которой происходит скачок плотности ρ, т.е. ее увеличение или уменьшение на выбранную величину в выбранном интервале глубин. Одним из примеров границы является местоположение пары или между парой соседних датчиков, в котором происходит скачок или изменение измеренной плотности на выбранную величину.
В этой модели гравитационное поле g(z) (более точно, его абсолютная величина, которая также равна вертикальной составляющей) измеряется в вертикальном стволе скважины с использованием сгруппированных гравиметрических датчиков 26 на глубинах , j=1,…,Ns, равномерно расположенных с шагом  . Соответственно, собранные данные гравиметрических исследований каждого датчика 26, могут быть отображены уравнением
. Соответственно, собранные данные гравиметрических исследований каждого датчика 26, могут быть отображены уравнением  , в котором δj означает погрешность позиционирования датчика (т.е. погрешность в определении местоположения датчика), а ξj означает погрешность измерений датчика (т.е. погрешность данных гравиметрических исследований датчиков 26). В этой модели не учитывается влияние, связанное с размером ствола скважины.
, в котором δj означает погрешность позиционирования датчика (т.е. погрешность в определении местоположения датчика), а ξj означает погрешность измерений датчика (т.е. погрешность данных гравиметрических исследований датчиков 26). В этой модели не учитывается влияние, связанное с размером ствола скважины.
Для определения плотности ρ=ρ(z) для z между первой и последней точками измерений  на основании данных скважинных гравиметрических исследований
на основании данных скважинных гравиметрических исследований  , j=1,…,Ns используется обработка данных. Описанные местоположения или точки определяются как глубины, на которых находятся датчики 26 или осуществляются измерения. Подразумевается, что глубиной необязательно является истинная вертикальная глубина или глубина, соотносимая с вертикальным стволом скважины. В некоторых вариантах осуществления глубиной может считаться осевое местоположение по длине ствола скважины, который может являться вертикальным и/или иметь траектории, отклоняющиеся от вертикали.
, j=1,…,Ns используется обработка данных. Описанные местоположения или точки определяются как глубины, на которых находятся датчики 26 или осуществляются измерения. Подразумевается, что глубиной необязательно является истинная вертикальная глубина или глубина, соотносимая с вертикальным стволом скважины. В некоторых вариантах осуществления глубиной может считаться осевое местоположение по длине ствола скважины, который может являться вертикальным и/или иметь траектории, отклоняющиеся от вертикали.
Гравитационное поле g(z) в модели 30 слоистой среды может быть задано следующим уравнением:

в котором:
означает гравитационное поле блока горной породы или геологического объема (например, слоя в геологическом разрезе) между zk и zk+1 в определенной точке или на определенной глубине z, a G означает универсальную гравитационную постоянную. Линейная функция Fz+С определяется географическим положением (долготой, широтой и высотой над уровнем моря) ствола скважины и является известной. Величина F называется нормальным градиентом и изменяется примерно на 308,6 мкГал/м.
С помощью уравнения (2) можно доказать, что в точках z≠zk, k=1,…,N

при этом штрихом (′) обозначено производное. Это означает, что, если бы гравитационное поле было с абсолютной точностью известно во всех точках по оси ствола скважины, задача определения ρ(z) на основании g(z) имела бы тривиальное решение. Тем не менее, эта задача имеет ряд особенностей, исключающих такие тривиальные решения.
Во-первых, поле g(z) измеряется в отдельных точках , разнесенных на определенный шаг или интервал h, сравнимый с толщиной слоя или даже превышающий ее. В известных измерительных системах обычно используется шаг h порядка 30 футов или 10 метров или даже 10 футов или 3 метров.
Во-вторых, измерительные точки никак не связаны с границами zk слоев, что означает, что упомянутый подход обеспечивает определение только так называемой кажущейся плотности (КП).
В-третьих, данные измерений гравитационного поля в стволе скважины содержат погрешности измерений датчиков и определения положения датчиков, т.е.  , где δj означает погрешность в определении местоположения датчиков, а ξj означает погрешность измерений датчиков.
, где δj означает погрешность в определении местоположения датчиков, а ξj означает погрешность измерений датчиков.
Существующие гравиметры обеспечивают определение местоположения датчика с точностью около 10 см, а точность измерений датчика обычно составляет до 5 мкГал. Кроме того, погрешность в определении местоположения влияет на общую полную погрешность измерений, например, погрешность 10 см в определении местоположения соответствует полной погрешности измерений около 10 мкГал. Соответственно, в ξj может учитываться погрешность в определении местоположения, и требуется лишь одна константа погрешности (т.е. пусть δj=0). Можно допустить, что погрешности ξj являются независимыми и имеют нормальное распределение при нулевом среднем и отклонении ε.
Эти особенности подразумевают, что задача определения ρ(z) на основании данных  измерений гравитационного поля в целом не имеет единственного решения. В действительности, если плотность ρ(z) между точками и
измерений гравитационного поля в целом не имеет единственного решения. В действительности, если плотность ρ(z) между точками и  изменяется, а интеграл
изменяется, а интеграл  остается таким же, это не оказывает влияния на данные гравиметрических исследований во всех точках.
остается таким же, это не оказывает влияния на данные гравиметрических исследований во всех точках.
Поскольку истинные местоположения геологических границ неизвестны, при определении таких границ используются модельные границы. Соответственно, определение таких границ включает нахождение приблизительного решения задачи инверсии измеренной в скважине силы тяжести в классе кусочно постоянных функций ρm-ρm(z) в форме  при
при  , где
, где  , k=1,…,Nm, (Nm≥Ns,N) означают точки скачков плотности или модельные границы.
, k=1,…,Nm, (Nm≥Ns,N) означают точки скачков плотности или модельные границы.
Из уровня техники известны два стандартных варианта нахождения этого приблизительного решения. В первом случае предполагается, что точки  , а также значения плотности
, а также значения плотности  могут изменяться, и ставится задача нахождения границ слоев вместе со значениями плотности. Этот подход предусматривает решение нелинейной задачи методами оптимизации, для чего требуется хорошее начальное приближение.
могут изменяться, и ставится задача нахождения границ слоев вместе со значениями плотности. Этот подход предусматривает решение нелинейной задачи методами оптимизации, для чего требуется хорошее начальное приближение.
Второй известный из уровня техники вариант называется методом определения кажущейся плотности (КП). Этот метод предусматривает выбор и фиксацию модельных границ  и тем самым сужение класса для поиска решения, а затем нахождение соответствующих значений
и тем самым сужение класса для поиска решения, а затем нахождение соответствующих значений  . После фиксации границ задача становится линейной для . При выборе различных модельных границ используются различные методы инверсии. Интерпретация данных скважинных гравиметрических исследований по традиции осуществляется с использованием этого второго варианта, в котором модельные границы соответствуют точкам
. После фиксации границ задача становится линейной для . При выборе различных модельных границ используются различные методы инверсии. Интерпретация данных скважинных гравиметрических исследований по традиции осуществляется с использованием этого второго варианта, в котором модельные границы соответствуют точкам  датчиков. Соответственно, получают хорошо известное уравнение инверсии:
датчиков. Соответственно, получают хорошо известное уравнение инверсии:

Определенная таким методом плотность является кажущейся плотностью, которая обозначается как ρapp(z).
В идеальном случае, когда датчики находятся на истинных границах слоев, и данные не содержат погрешностей, кажущаяся плотность ρapp(z) совпадает с истинной плотностью ρ(z). Тем не менее, кажущаяся плотность может значительно отличаться от истинной плотности, но при этом обеспечивать точное соответствие промысловых данных и модельных данных гравиметрических исследований, вычисленных с использованием кажущей плотности. Поскольку плотность связана с гравитационным полем посредством дифференциации, задача инверсии измеренной в скважине силы тяжести является некорректно поставленной в том смысле, что незначительные погрешности результатов измерений могут приводить к значительным погрешностям определения плотности. Это видно уже при определении кажущейся плотности. В результате деления приращения данных гравиметрических исследований со значительными погрешностями на малую величину h получают значительные погрешности определения плотности. Для решения некорректно поставленных задач требуется определенная регуляризация, т.е. использование априорной информации.
На фиг. 4 проиллюстрирован один из вариантов осуществления метода 40 определения геологии толщи пород, например, определения местоположения и параметров плотности границ и слоев в геологическом разрезе. Метод 40 применяется в сочетании, например, с множеством гравиметрических датчиков, таких как компоновка 20 измерительных приборов и/или датчики 26, устройством 22 обработки данных и/или наземным устройством 24 обработки. Тем не менее, метод 40 может применяться в сочетании любой применимой комбинацией процессоров и датчиков. Метод 40 включает одну или несколько стадий 41-45. В одном из вариантов осуществления метод 40 предусматривает выполнение всех стадий 41-45 в описанном порядке. Тем не менее, некоторые стадии могут быть исключены, стадии могут быть добавлены, или порядок следования стадий может быть изменен.
Метод 40 и алгоритмы, описанные в связи со методом 30, используются для определения приблизительных местоположений  геологических границ zk при наличии данных
геологических границ zk при наличии данных  скважинных гравиметрических исследований. В одном из вариантов осуществления местоположение геологической границы определяется как местоположение, в котором происходит скачок истинной плотности ρ от первого значения ко второму значению. "Скачок" может определяться как изменение плотности между местоположениями двух соседних датчиков, которое соответствует выбранной пороговой величине, или превышает ее. Одним из примеров такого скачка является изменение плотности, составляющее около 0,2 г/куб. см.
скважинных гравиметрических исследований. В одном из вариантов осуществления местоположение геологической границы определяется как местоположение, в котором происходит скачок истинной плотности ρ от первого значения ко второму значению. "Скачок" может определяться как изменение плотности между местоположениями двух соседних датчиков, которое соответствует выбранной пороговой величине, или превышает ее. Одним из примеров такого скачка является изменение плотности, составляющее около 0,2 г/куб. см.
На первой стадии 41 размещают в стволе 12 скважины измерительную аппаратуру, такую как компоновка 20 измерительных приборов. Аппаратура может спускаться в ствол скважины посредством любого применимого средства доставки, такого как колонна 11 труб или кабель. В одном из вариантов осуществления датчиками 26 являются абсолютные гравиметрические датчики.
На второй стадии 42 осуществляют множество измерений  на протяжении выбранного периода времени. Каждое измерение . включает измерение, выполняемое одним из множества датчиков 26 в выбранный момент времени. Например, в компоновку 20 измерительных приборов входит Ns гравиметрических датчиков 26, расположенных с фиксированными сдвигами на интервал h. Процессор, такой как наземное устройство 24 обработки, генерирует или принимает данные, отображающие измерения .
на протяжении выбранного периода времени. Каждое измерение . включает измерение, выполняемое одним из множества датчиков 26 в выбранный момент времени. Например, в компоновку 20 измерительных приборов входит Ns гравиметрических датчиков 26, расположенных с фиксированными сдвигами на интервал h. Процессор, такой как наземное устройство 24 обработки, генерирует или принимает данные, отображающие измерения .
В одном из вариантов осуществления на третьей стадии 43 делаются допущения о предполагаемой плотности, которые используются в качестве априорной информации. Например, допускается, что сопутствующий границе скачок Δρ плотности является высоким (например, от около 0,2 г/куб. см до около 0,3 г/куб. см), а слои в геологическом разрезе являются довольно толстыми применительно к шагу сбора данных, например, в пределах слоя расположено множество датчиков. В одном из вариантов осуществления допускается, что на каждый слой приходится по меньшей мере три датчика. Соответственно, в этом варианте осуществления метода 30 определяются геологические границы между толстыми слоями с высоким контрастом по плотности и пропускаются границы между тонкими слоями или слоями с низким контрастом по плотности.
В одном из вариантов осуществления метода 30 предусмотрен ряд дополнительных допущений в отношении зашумленных данных измерений, т.е. данных с погрешностями в определении местоположения и/или погрешностями измерений.
Во-первых, может допускаться, что погрешность ξj измерений датчика имеет нормальное распределение с нулевым средним, а  не превышает определенной величины εb с вероятностью Р, близкой к единице. Например, если εb равна умноженному на 3 отклонению ξj то согласно правилу трех сигм
не превышает определенной величины εb с вероятностью Р, близкой к единице. Например, если εb равна умноженному на 3 отклонению ξj то согласно правилу трех сигм  с вероятностью Р=0,997. Например, если εb принимается за малую величину, это указывает на то, что данные являются мало зашумленными, и алгоритм становится более чувствительным, позволяя обнаруживать больше границ. Тем не менее, если данные являются в действительности зашумленными, эти границы могут являться паразитными, и может использоваться большая величина εb.
с вероятностью Р=0,997. Например, если εb принимается за малую величину, это указывает на то, что данные являются мало зашумленными, и алгоритм становится более чувствительным, позволяя обнаруживать больше границ. Тем не менее, если данные являются в действительности зашумленными, эти границы могут являться паразитными, и может использоваться большая величина εb.
Во-вторых, могут делаться допущения в отношении колебания плотности и предполагаемой толщины слоев. Путем регуляризации сглаживается вектор Gj (описанный далее), в результате чего вдоль соответствующих границ на определенном расстоянии начинают ощущаться другие границы. Соответственно, нахождение определенной геологической границы включает использование расчетов скачка плотности на соседних границах и расстояния до них. Эта информация задана колебанием R плотности и предполагаемой минимальной толщиной Т слоя. Может допускаться, что общее колебание плотности в каждом сегменте  не превышает R, т.е. истинная плотность удовлетворяет неравенству
не превышает R, т.е. истинная плотность удовлетворяет неравенству  при всех k=1,…,N. Величина Т и интервал h, также именуемый шагом h сбора данных, определяют предполагаемое число датчиков на слой р=[T/h]. В одном из вариантов осуществления в качестве предполагаемого числа датчиков на слой выбирается по меньшей мере три датчика. В данном случае, [] означает целую часть числа р.
при всех k=1,…,N. Величина Т и интервал h, также именуемый шагом h сбора данных, определяют предполагаемое число датчиков на слой р=[T/h]. В одном из вариантов осуществления в качестве предполагаемого числа датчиков на слой выбирается по меньшей мере три датчика. В данном случае, [] означает целую часть числа р.
Описанные алгоритмы определяют присутствие границ между парой датчиков путем проверки выполнения определенного условия. В силу погрешности данных и влияния соседних границ это условие может выполняться не для выбранной пары датчиков, а для соседней или даже еще более отдаленной пары. Это отклонение возрастает при небольшом скачке Δρk плотности, больших погрешностях ξj или близости соседних границ. Соответственно, указывается близлежащая область поиска, т.е. максимальное расстояние В между истинным местоположением zk границы и искомой приблизительной границей  . Если расстояние В является небольшим, алгоритм может не позволять видеть границы с низким скачком плотности. Напротив, если расстояние В является большим, вследствие шума могут возникать паразитные границы. Величина В и шаг h сбора данных определяют имеющий натуральное значение параметр s=[B/h], используемый в алгоритме.
. Если расстояние В является небольшим, алгоритм может не позволять видеть границы с низким скачком плотности. Напротив, если расстояние В является большим, вследствие шума могут возникать паразитные границы. Величина В и шаг h сбора данных определяют имеющий натуральное значение параметр s=[B/h], используемый в алгоритме.
На четвертой стадии 44 используются алгоритмы для анализа данных гравиметрических исследований и определения местоположения одной или нескольких границ и сопутствующего им изменения плотности. Далее описан один из вариантов осуществления алгоритма при условии, что данные гравиметрических исследований не содержат погрешностей, или погрешности являются минимальными.
В этом варианте осуществления метода 40 для гравитационного поля (без нормального градиента) используется следующее выражение:

в котором:

и:

В этом представлении акцентируется, что g(z) является кусочно линейной функцией, разрывы которой зависят от изменений или скачков Δρk плотности. В случае содержащих погрешности промысловых данных это означает, что

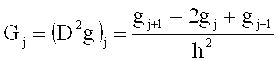
Присутствие границы (в случае точных не содержащих погрешностей данных) становится очевидным, если для последовательности измерений gj определена разность D2g второго порядка:

Эта разность второго порядка обозначается как Gj. В алгоритме допускается, что глубина zk залегания границы проходит между датчиками (при наличии датчиков nk и nk+1), находящимися на глубинах  и
и  , и имеет относительное местоположение λk между
, и имеет относительное местоположение λk между  и
и  , при этом
, при этом  . Если каждый слой содержит по меньшей мере три датчика, т.е. nk+2<nk+1, то
. Если каждый слой содержит по меньшей мере три датчика, т.е. nk+2<nk+1, то

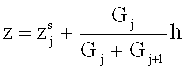
ненулевые элементы Gj, соответствующие присутствию границ, разделены нулевыми элементами. Соответственно, zk и Δρk могут определяться следующим образом. Если Gj+Gj+1≠0, a Gj-1=Gj+2=0, то между zj и zj+1 находится граница z, которая может быть найдена согласно формуле:

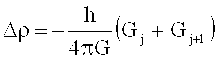
а скачок плотности быть найден согласно формуле:

На фиг. 5 проиллюстрирован один из примеров разности Gj второго порядка для имитированных не содержащих погрешностей данных гравиметрических исследований. Данные генерированы на основании модели плотности, а вычисления осуществлены с использованием группы гравиметрических датчиков, разнесенные на интервал (h) в один метр. Представленные на фиг. 5 данные демонстрируют, с использованием описанных алгоритмов могут ясно определяться границы толщ пород. Например, приведенный выше алгоритм используется для обнаружения границ, которые расположены и показаны в виде пиков вблизи датчиков с номерами 4, 27, 44, при условии, что слои вокруг каждой обнаруженной границы являются достаточно толстыми для осуществления трех гравиметрических исследований внутри слоя.
Далее описан другой вариант осуществления метода 40 применительно к общему случаю, когда данные измерений, содержат погрешности. Алгоритм выводят путем регуляризации, например, путем использования свертки Gj с определенной дельтообразной последовательностью и осуществления анализа с целью определения того, какие контрасты по плотности (Δρ) можно отличить от паразитных данных, получаемых вследствие погрешностей (например, погрешностей измерений и определения глубины). Геологические границы определяют итерационно, начиная с границы с наибольшим скачком Δρk плотности и заканчивая границами, отличимыми от паразитных явлений вследствие шума.
Данные, используемые в этом варианте осуществления, считаются зашумленными данными, при этом данные каждого гравиметрического исследования содержат определенные погрешности и могут быть представлены в виде  означает погрешность измерений и/или погрешности в определении местоположений гравиметрических датчиков 26.
означает погрешность измерений и/или погрешности в определении местоположений гравиметрических датчиков 26.
В этом варианте осуществления вектор Gj разности второго порядка содержит определенную погрешность и обозначен как  . К разности второго порядка для последовательности данных гравиметрических исследований применяется определенная регуляризация. Разность второго порядка может быть представлена как:
. К разности второго порядка для последовательности данных гравиметрических исследований применяется определенная регуляризация. Разность второго порядка может быть представлена как:

В одном из вариантов осуществления  сглаживается путем использования свертки с двусторонней последовательностью K(q), содержащей элементы
сглаживается путем использования свертки с двусторонней последовательностью K(q), содержащей элементы  , при этом 0≤q<1, j=0,±1,±2,…, а значение Q=(1-q)/(1+q) выбрано из условия
, при этом 0≤q<1, j=0,±1,±2,…, а значение Q=(1-q)/(1+q) выбрано из условия  . Свертка разности второго порядка обозначается как Cj, а приблизительное изменение Vj плотности может быть выведено из следующих уравнений:
. Свертка разности второго порядка обозначается как Cj, а приблизительное изменение Vj плотности может быть выведено из следующих уравнений:


в которых "q" означает параметр регуляризации, a Ns означает число датчиков. Как видно из приведенных уравнений, когда q=0,  .
.
Согласно условию линейности С может быть представлено следующим уравнением:

в котором Gk означает вектор с элементами  , где j=1,…,Ns, а
, где j=1,…,Ns, а  означает разность второго порядка на определенной границе "k", которая обозначается как nk. Вектор Сk=K(q)∗Gk соответствует границе k-го порядка и содержит компоненты:
означает разность второго порядка на определенной границе "k", которая обозначается как nk. Вектор Сk=K(q)∗Gk соответствует границе k-го порядка и содержит компоненты:

Может быть выведен вектор Е=K(q)∗(D2ξ), который содержит компоненты:

Для определенной фиксированной границы nK, имеющей местоположение zK, компоненты С и V с близкими к nК номерами могут быть представлены как:
В этом варианте осуществления λK=(zK-zj)/h для приблизительной границы nK, находящейся между датчиками на глубинах  и
и  . На основании приведенных выше уравнений могут быть определены следующие обозначения
. На основании приведенных выше уравнений могут быть определены следующие обозначения 



С помощью приведенных выше уравнений может быть выведена следующая формула изменения плотности:

Видно, что при ε=0 и q=0 функция ошибок eK,l(q)=0, и для определения местоположения границы и скачка плотности могут использоваться такие формулы, как и в случае точных или не содержащих погрешностей данных.
В случае зашумленных данных алгоритм предусматривает сведение к минимуму остаточного члена еK,l(q) путем надлежащего выбора параметра q регуляризации, исходя из описанных выше допущений. С этой целью по отдельности оценивается каждый член в eK,l(q). Оценка eK,l(q) в алгоритме начинается с последнего члена, относящегося к погрешности измерения датчик (т.е. с последнего члена уравнения (24)). Из ξj путем свертки получают случайную переменную Еj+Ej+1:

Если ε означает отклонение ξj, то отклонение Ej+Ej+1 равно  . Путем вычисления:
. Путем вычисления:
получают следующую оценку:
 с вероятностью Р,
с вероятностью Р,
и, соответственно, оценку последнего члена уравнения для еK,l(q):
 с вероятностью Р.
с вероятностью Р.
Выполнение алгоритм продолжается путем оценки первых членов в eK,l(q). С использованием тождества Абеля для последовательностей можно вывести следующее уравнение:

Аналогичным образом,  . Затем оценка для eK,l(q) может быть отображена следующим уравнением (справедливым с вероятностью Р):
. Затем оценка для eK,l(q) может быть отображена следующим уравнением (справедливым с вероятностью Р):

На фиг. 6 представлена наглядная иллюстрация 50 значений Vj, которые иллюстрируют применение алгоритма для сведения к минимуму остаточного члена eK,l(q) с целью локализации геологических границ, т.е. нахождения пары датчиков, между которыми проходит граница. Для каждого значения l показана диаграмма 52 ΔρKfK,l(q) в зависимости от λK, а также диаграммы 54 и 56, иллюстрирующие функцию, увеличенную на  и уменьшенную на
и уменьшенную на  , соответственно.
, соответственно.
Пара (λK,  ) всегда находится на соответствующей полосе, ограниченной диаграммами 54 и 56. В случае не содержащих погрешностей данных εb=0, q=0,
) всегда находится на соответствующей полосе, ограниченной диаграммами 54 и 56. В случае не содержащих погрешностей данных εb=0, q=0,  , а остальные , с малым значением l равны нулю. Соответственно,
, а остальные , с малым значением l равны нулю. Соответственно,  достигает максимума при j=nK.
достигает максимума при j=nK.
В случае присутствия погрешностей алгоритм предусматривает уменьшение путем выбора значения q, чтобы  достигал максимума при j=nK (или соседних значениях j). На фиг. 6 показано, что это не всегда возможно в случае зашумленных данных, и максимум может смещаться в соседнюю точку. Более точно, если
достигал максимума при j=nK (или соседних значениях j). На фиг. 6 показано, что это не всегда возможно в случае зашумленных данных, и максимум может смещаться в соседнюю точку. Более точно, если

или аналогичным образом
то достигает максимума в одной из точек на расстоянии определенного интервала "s" от приблизительной границы nK, т.е. j=nK-s,…,nK+s. В этом варианте осуществления параметр q выбран таким образом, чтобы свести к минимуму Fs(q). После того, как найдена точка "q∗" минимума, скачки Δρ плотности на геологических границах, которые могут быть локализованы в пределах интервалов s между датчиками, должны удовлетворять неравенству:
а соответствующее максимальное значение должно удовлетворять неравенству:

Кроме того,  . Соответственно, можно заключить, что новая найденная граница пролегает между
. Соответственно, можно заключить, что новая найденная граница пролегает между  и
и  , а Vj является ее приблизительным скачком плотности. Точное местоположение границы в пределах интервала является более трудно уловимым. В стандартном случае, когда ε=0, а q=0, положение λ задано формулой:
, а Vj является ее приблизительным скачком плотности. Точное местоположение границы в пределах интервала является более трудно уловимым. В стандартном случае, когда ε=0, а q=0, положение λ задано формулой:
В случае, когда ε=0, q>0, а соседние границы отсутствуют, положение λ задано формулой:
При применении этой формулы в случае зашумленных данных полученные значения могут находиться за пределами интервала [0, 1]. При получении такого результата формула определения местоположения между и  модифицируется следующим образом:
модифицируется следующим образом:

что всегда дает значения в пределах интервала [0, 1].
В одном из вариантов осуществления после того, как найдены некоторые границы nK, на пятой стадии 45 вычитается их влияние из измеренного гравитационного поля, и определяется очередная граница.
Например, на стадии 34 определено Nb границ, каждая из которых имеет глубину  и скачок “
и скачок “ ” плотности. Число датчиков, непосредственно предшествующих (т.е. вверх по стволу скважины) границе, обозначено как “
” плотности. Число датчиков, непосредственно предшествующих (т.е. вверх по стволу скважины) границе, обозначено как “ ” в результате чего
” в результате чего  . Добавление очередной границы осуществляется следующим образом.
. Добавление очередной границы осуществляется следующим образом.
Сначала выбирается максимальное колебание R* плотности  . Вычисляется точка q* минимума функции Fs, как описано выше, но с использованием колебания R* плотности, т.е. с использованием Fs(q;εb,R*,р). Затем вычисляется V*, как описано выше с использованием R*, т.е.:
. Вычисляется точка q* минимума функции Fs, как описано выше, но с использованием колебания R* плотности, т.е. с использованием Fs(q;εb,R*,р). Затем вычисляется V*, как описано выше с использованием R*, т.е.:
 .
.
Вычисляются векторы G*, С и V. Как показано далее, элементы G* вычисляются путем вычитания найденного для каждой границы Nb, значения Gj, которое обозначено как Gj bk. Эти векторы вычисляются на основании следующих уравнений:


в которых
 и
и

Затем аналогично стадии 34 описанного метода находят точку j=j∗ максимума , соответствующую другой границе Nb+1 и определяют местоположение λ границы Nb+1 как описано выше.
Если соблюдено условие  , добавляется граница Nb+1 со следующим местоположением и скачком плотности:
, добавляется граница Nb+1 со следующим местоположением и скачком плотности:

Тем не менее, если условие не соблюдено, граница не добавляется и выполнение алгоритма прекращается. Затем стадия 45 может повторно выполняться, пока не останется границ, удовлетворяющих указанным условиям.
Помимо метода 30 определения местоположений и изменений плотности геологических границ также предложен способ инверсии данных скважинных гравиметрических исследований, именуемый в изобретении методом определения регуляризованной плотности с предварительно локализованными границами (методом РПГ или RDB, от английского - regularized density method with prelocated boundaries).
Если истинные местоположения всех геологических границ заданы с высокой точностью, или предложенным методом обнаружены все местоположения, можно проложить все границы и инвертировать данные скважинных гравиметрических исследований. Тем не менее, в некоторых вариантах осуществления может быть невозможным гарантировать нахождение всех геологических границ описанным методом. Соответственно, предложен метод РПГ.
Первая стадия метода РПГ включает априорное допущение того, что слои являются достаточно толстыми относительно шага "h" сбора данных (т.е. интервала между гравиметрическими датчиками) (например, вмещают по меньшей мере 3 датчика на слой). С использованием данных гравиметрических исследований определяют границы насколько это возможно с использованием метода 40. Например, находят геологические границы zk (включая полученные предполагаемые границы  ) и добавляют их к набору модельных границ
) и добавляют их к набору модельных границ  , первоначально полученных, например, путем равномерного деления интервала наблюдений
, первоначально полученных, например, путем равномерного деления интервала наблюдений  на (Ns-1)М частей. Способ нахождения описан выше в качестве метода 30 применительно как к не содержащим погрешностей, так и к зашумленным данным.
на (Ns-1)М частей. Способ нахождения описан выше в качестве метода 30 применительно как к не содержащим погрешностей, так и к зашумленным данным.
Вторая стадия метода РПГ включает решение следующей задачи минимизации:

в которой А=(ajk) означает характеристическую матрицу, у которой элемент аjk равен  , при этом ρk означает удельную плотность, a zk заменены
, при этом ρk означает удельную плотность, a zk заменены  . Параметр α регулирует замыкание искомой плотности относительно эталонной модели ρref при условии априорных допущений (средней плотности в простейшем случае), а β отвечает за сглаживание, т.е. замыкание плотностей в соседних слоях модели. Функция wk определяется как:
. Параметр α регулирует замыкание искомой плотности относительно эталонной модели ρref при условии априорных допущений (средней плотности в простейшем случае), а β отвечает за сглаживание, т.е. замыкание плотностей в соседних слоях модели. Функция wk определяется как:
Соответственно, в наборе модельных границ содержатся точки двух типов:
1. точки, полученные путем равномерного деления интервала наблюдения  на (Ns-1)M частей, в частности, включая точки
на (Ns-1)M частей, в частности, включая точки  датчиков, и
датчиков, и
2. точки приблизительных границ, найденные на первой стадии.
Точки типа 1 необходимы для обеспечения гибкости ρm; а добавление точек обеспечивает скачки ρm вблизи истинных геологических границ.
В одном из вариантов осуществления метода РПГ используются свойства гравитационного пола, определенные в стволе скважины, и априорная информация о слоях в геологическом разрезе. Одним из примеров такой априорной информации в данном случае является зависимость Н/h≥3 при толщине H слоя и шаге h сбора данных и высокого контраста по плотности на геологических границах (например, критический контраст по плотности зависит от погрешности датчика и интервала и составляет порядка 0,2 г/куб. см).
Описанные устройства и способы обеспечивают различные преимущества по сравнению с известным уровнем техники. Например, устройства и способы позволяют с высокой точностью определять местоположения и плотность геологических границ, а также отличать указывающие границу скачки плотности от скачков вследствие шума.
Кроме того, способ инверсии методом РПГ является более точным, чем другие способы. Например, на фиг. 7-11 показана точность метода РПГ в сравнении с известным из уровня техники методом определения кажущейся плотности (КП). В этих примерах сравнивается точность методов КП и РПГ, т.е. разность  между найденной плотностью ρm и истинной плотностью ρ. Один из способов нахождения этой разности предусматривает вычисление среднеквадратической ошибки (СКО):
между найденной плотностью ρm и истинной плотностью ρ. Один из способов нахождения этой разности предусматривает вычисление среднеквадратической ошибки (СКО):
Кроме того, с целью получения полной картины погрешностей также вычисляется следующая функция распределения ошибок (EDF):

которая указывает, в каком числе точек (в процентах) погрешность превышает заданный уровень “t”. Функция EDF(t) всегда является невозрастающей; при этом меньшее значение EDF{t) означает более высокую точность.
Сравнение включает следующие стадии. Сначала генерируют данные скважинных гравиметрических исследований с использованием, например, заданной модели плотности, и загрязняют данные гауссовым шумом уровня "ε". Затем инвертируют скважинные данные с использованием методов КП и РПГ. Наконец, сравнивают инвертированную плотность с истинной плотностью ρ, вычисляют среднеквадратическую ошибку и строят кривую функции распределения ошибок EDF(t).
В методе РПГ выбирают параметр β регуляризации согласно хорошо известному остаточному принципу:  , где
, где  означает данные гравиметрических исследований, соответствующие найденной плотности. Эталонная модель ρref представляет собой среднюю плотность, вычисленную на основании всего набора данных гравиметрических исследований. Во избежание особенности системы уравнений в качестве первого параметра α регуляризации используют малое число.
означает данные гравиметрических исследований, соответствующие найденной плотности. Эталонная модель ρref представляет собой среднюю плотность, вычисленную на основании всего набора данных гравиметрических исследований. Во избежание особенности системы уравнений в качестве первого параметра α регуляризации используют малое число.
На фиг. 7-10 показаны примеры результатов сравнения. Была проведена серия экспериментов на моделированных данных гравиметрических исследований с использованием различных значений погрешности датчиков и интервала между датчиками, как показано далее в Таблице 1:
На фиг. 7 показаны результаты 60 определения плотности с использованием способа инверсии методом РПГ (кривая 62) и способа инверсии методом КП (кривая 64) с сравнении с истинной плотностью (кривая 66). Эти результаты вычисляют при погрешности датчиков 1 мкГал и интервале 1 м между датчиками. Вертикальные линии сетки указывают положения датчиков. Оба метода демонстрируют отличную согласованность с истинной плотностью. СКО в методах РПГ и КП составляют, соответственно, 0,037 г/куб. см и 0,066 г/куб. см.
На фиг. 8 показаны результаты применения метода РПГ и КП при погрешности датчиков 3 мкГал и интервале 1 м между датчиками. В этом случае в результате применения метода КП были получены паразитные колебания. Метод РПГ демонстрирует хорошее определение местоположения границ слоев со сглаживанием плотности внутри слоя. СКО в методах РПГ и КП составляют, соответственно, 0,067 г/куб. см и 0,08 г/куб. см. Следует отметить, что в этом случае СКО в методе РПГ является почти такой же, как в методе КП при погрешности 1 мкГал на фиг. 7.
На фиг. 9 показаны результаты применения методов РПГ и КП при погрешности датчиков 5 мкГал и интервале 0,5 м между датчиками результаты. Следует отметить, что датчики находятся на глубинах, отображенных вертикальными линиями сетки, и между вертикальными линиями сетки. Эти результаты показывают, что при высокой погрешности датчиков и небольшом интервале между датчиками метод КП дает очень большие погрешности (СКО=0,168 г/куб. см). Напротив, продемонстрировано, что даже при высокой погрешности датчиков метод РПГ позволяет определять границы при небольшом интервале между датчиками (СКО=0,068 г/куб. см).
На фиг. 10 показаны результаты применения методов РПГ и КП при погрешности датчиков 5 мкГал и интервале 1 м между датчиками. СКО в методах РПГ и КП составляет 0,075 г/куб. см и 0,104 г/куб. см, соответственно. Тем не менее, метод РПГ позволяет определять некоторые границы. Плотность между границами сглажена.
Приведенные результаты экспериментов демонстрируют преимущества метода РПГ. Показано, что при меньшей погрешности датчиков и интервале между датчиками уменьшается среднеквадратическая ошибка и улучшается реконструкция распределения по плотности. При фиксированной погрешности датчиков и интервале между датчиками метод РПГ всегда обеспечивает более высокую точность, чем метод КП.
Погрешности в определении плотности в методе КП возникают по двум причинам: при большом значении h датчик может находиться слишком далеко от истинных границ слоев, а при малых значениях h даже незначительная погрешность датчика приводит к паразитным колебаниям вследствие некорректной постановки задачи. Метод РПГ позволяет преодолевать оба недостатка метода определения кажущейся плотности: сначала определяются границы с высокими скачками плотности, а затем используется регуляризация для сглаживания плотности внутри слоев.
Описанный "ствол скважины" означает один ствол, который образует всю или часть пробуренной скважины. Описанные "толщи пород" означают различные структуры и материалы, которые могут встречаться в подземной среде. Соответственно, следует учесть, что, хотя термин "толща пород" относится в целом к интересующим геологическим формациям, используемый термин "толщи пород" в некоторых случаях может включать любые интересующие геологические точки или объемы (такие как обследуемый район), включая содержащиеся в них флюиды. Кроме того, помимо толщ пород в стволе скважины также может находиться различный буровой инструмент или оборудование для заканчивания скважин.
Помимо этого, следует отметить, что используемый термин "бурильная колонна" или "колонна" относится к любой конструкции или несущему элементу, применимому для спуска инструмента в ствол скважины или для соединения с поверхностью бурового долота, и не ограничен описанными в изобретении конструкцией и конфигурацией. Например, колонна 11 труб сконфигурирована как эксплуатационная колонна или колонна для определения параметров продуктивного пласта. Кроме того, хотя описано, что компоновка 20 расположена в стволе скважины или сообщается со стволом скважины, компоновка 20 не ограничена этим. Компоновка 20 может использоваться для любых наземных или скважинных измерений давления и может быть включена в любой применимый несущий элемент или снабжена им. Используемый термин "несущий элемент" означает любое устройство, компонент устройства, сочетание устройств, среду и/или элемент, который может использоваться для доставки, размещения, опоры или иного облегчения использования другого устройства, компонента устройства, сочетания устройств, среды и/или элемента. Неограничивающие примеры несущих элементов включают бурильные колонны из спиральных труб, сочлененных труб и любое их сочетание или часть. Другие примеры несущих элементов включают обсадные трубы, кабели, спускаемые на кабеле зонды, зонды на скользящей муфте, скважинные переводники, КНБК, бурильную колонну.
Идеи изобретения могут быть воплощены в различных системах анализа и/или аналитических компонентах, включая цифровые и/или аналоговые системы. Система может содержать такие компоненты, как процессор, запоминающие среды, память, устройство ввода, устройство вывода, канал связи (проводной, беспроводной, гидроимпульсный, оптический или иной), пользовательские интерфейсы, программы системы программного обеспечения, процессоры сигналов (цифровых или аналоговых) и другие такие компоненты (такие как резисторы, конденсаторы, индукторы и т.п.) для обеспечения функционирования и исследований, выполняемых описанными в изобретении устройствами и способами любым из нескольких методов, хорошо известных из техники. Предполагается, что идеи изобретения могут, но необязательно должны быть реализованы в сочетании с набором выполняемых компьютером команд, которые хранятся на машиночитаемом носителе, включая запоминающие устройства (ПЗУ, ОЗУ), оптические устройства (ПЗУ на компакт-диске), магнитные устройства (диски, накопители на жестких дисках) или устройства любого другого типа, и при выполнении которых в компьютере реализуется способ согласно настоящему изобретению. Эти команды могут обеспечивать функционирование, управление, сбор данных, исследования и любые другие функции оборудования, которые разработчик системы, владелец, пользователь или иное лицо сочтет важными помимо описанных в изобретении функций.
Кроме того, с целью обеспечения особенностей идей настоящего изобретения могут быть предусмотрены и использоваться различные другие компоненты. Например, в подтверждение различных особенностей, рассмотренных в изобретении, или других не описанных функций могут использоваться линия отбора проб, хранилище проб, отборная камера, линия выпуска проб, насос, поршень, источник питания (например, по меньшей мере одно из следующего: генератор, дистанционный источник питания и батарея), источник вакуума, источник давления, холодильная (т.е. охлаждающая) установка или источник, нагревающий компонент, движущая сила (такая как сила поступательного движения, сила тяги или вращающая сила), магнит, электромагнит, датчик, электрод, передатчик, приемник, приемопередатчик, контроллер, оптическая установка, электрическая установка или электромеханическая установка.
Специалист в данной области техники поймет, что различные компоненты или технологиями могут обеспечивать определенные необходимые или выгодные функциональные возможности или признаки. Соответственно, считается, что эти функциональные возможности и признаки, которые могут потребоваться в подтверждение прилагаемой формулы изобретения и ее разновидностей, являются неотъемлемой частью описанных идей и частью раскрытого изобретения.
Хотя изобретение описано со ссылкой на примеры его осуществления, специалисты в данной области техники поймут, что в него могут быть внесены различные изменения, а различные элементы могут быть заменены эквивалентами в пределах объема изобретения. Кроме того, с целью приспособления конкретного прибора, ситуации или материала к идеям изобретения специалистами в данной области техники может быть предусмотрено множество модификаций, не выходящих за пределы его существа и объема. Соответственно, предполагается, что изобретение не ограничено конкретным вариантом осуществления, раскрытым в качестве лучшего варианта его изобретения, а включает все варианты осуществления, входящие в объем прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОГНОЗИРОВАНИЕ БУРИМОСТИ ИСХОДЯ ИЗ ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ, ИСПУСКАЕМОГО В ХОДЕ БУРОВЫХ РАБОТ | 2013 |
|
RU2657277C2 |
| СПОСОБ ГЕОФИЗИЧЕСКОЙ РАЗВЕДКИ | 2017 |
|
RU2659753C1 |
| Способ оценки возраста и состава пород осадочных бассейнов в арктическом регионе | 2024 |
|
RU2835972C1 |
| СПОСОБ РАЗВЕДКИ МЕСТОРОЖДЕНИЙ КАЛИЙНО-МАГНИЕВЫХ СОЛЕЙ НА БОЛЬШИХ ГЛУБИНАХ | 2014 |
|
RU2602427C2 |
| СПОСОБ ПРОВОДКИ СТВОЛА ГОРИЗОНТАЛЬНОЙ СКВАЖИНЫ НА ОСНОВЕ ГЕОЛОГИЧЕСКИХ ИССЛЕДОВАНИЙ | 2006 |
|
RU2313668C1 |
| Способ определения геологических свойств терригенной породы в около скважинном пространстве по данным геофизических исследований разрезов скважин | 2003 |
|
RU2219337C1 |
| СПОСОБ ГЕОФИЗИЧЕСКОЙ РАЗВЕДКИ | 2011 |
|
RU2482519C2 |
| СПОСОБ ПРОВЕДЕНИЯ ГЕОЛОГИЧЕСКИХ ИССЛЕДОВАНИЙ СКВАЖИН | 2009 |
|
RU2418948C1 |
| КОМПЛЕКСНАЯ АППАРАТУРА ИМПУЛЬСНОГО МУЛЬТИМЕТОДНОГО НЕЙТРОННОГО КАРОТАЖА ДЛЯ ПРОМЫСЛОВО-ГЕОФИЗИЧЕСКИХ ИССЛЕДОВАНИЙ ОБСАЖЕННЫХ ГАЗОВЫХ И НЕФТЕГАЗОВЫХ СКВАЖИН | 2022 |
|
RU2789613C1 |
| СИСТЕМА И СПОСОБ ВЫПОЛНЕНИЯ ОПЕРАЦИИ ИНТЕНСИФИКАЦИИ СКВАЖИНЫ | 2014 |
|
RU2663011C2 |
Изобретение относится к области скважинных гравиметрических исследований и может быть использовано для определения геологии толщи пород. Сущность: принимают данные гравиметрических исследований от каждого из множества гравиметрических датчиков


1. Способ определения геологии толщи пород, включающий:
прием данных гравиметрических исследований от каждого из множества гравиметрических датчиков ns j, упорядоченно сгруппированных по длине ствола скважины в толще пород, каждый из которых генерирует данные gj гравиметрического исследования, соответствующие местоположению zs j, и каждый из которых разделен интервалом h,
генерирование модели толщи пород, содержащей приблизительные геологические границы Nm, имеющие приблизительную глубину zm k и определяющие число слоев в геологическом разрезе между ними,
допущение того, что каждая геологическая граница находится в местоположении, в котором изменение плотности соответствует выбранной пороговой величине или превышает ее, а каждый из слоев в геологическом разрезе имеет толщину, охватываемую двумя или более из множества датчиков ns j, и
определение местоположения и изменения Δρ плотности геологической границы z между местоположениями zs j и zs j+1 исходя из данных gj гравиметрических исследований и интервала h.
2. Способ по п.1, в котором каждый из слоев в геологическом разрезе имеет толщину, охватываемую по меньшей мере тремя из множества датчиков.
3. Способ по п.1, в котором определение включает определение местоположения геологической границы на основании уравнения:
 ,
,
в котором Gj означает разность второго порядка для последовательности измерений gj и представлена уравнением:
 .
.
4. Способ по п.2, в котором определение включает определение изменения Δρ плотности на основании уравнения:
 .
.
5. Способ по п.1, в котором определение включает:
допущение максимального колебания R плотности между границей z и соседней границей и предполагаемой толщины Т слоя в геологическом разрезе между границей z и соседней границей,
определение предполагаемого числа датчиков на слой р, при этом р=[T/h], и
допущение максимального расстояния В между расчетной границей z и действительной границей и определение имеющего натуральное значение параметра s, при этом s=[B/h].
6. Способ по п.1, в котором гравиметрические исследования gj представляют собой последовательность гравиметрических исследований, содержащих погрешность ξj и представленных уравнением:
 ,
,
при этом стадия определения включает вычисление разности Gε j второго порядка для последовательности гравиметрических исследований на основании уравнения:
 .
.
7. Способ по п.6, в котором стадия определения включает использование свертки Cj разности Gε j второго порядка с последовательностью Kj регуляризации, представленной уравнением:
 ,
,
в котором q означает параметр регуляризации, значение которого составляет от нуля до единицы, a Q представлена уравнением:
Q=(1-q)/(1+q).
8. Способ по п.7, в котором использование свертки включает выведение следующих уравнений:
 , j=1, …, Ns (or C=K(q)*Gε), и
, j=1, …, Ns (or C=K(q)*Gε), и

в которых Vj означает приближение границы изменения плотности.
9. Способ по п.8, в котором стадия определения включает фиксацию приблизительной границы nK, залегающей на соответствующей глубине zK, и выбор значения q, при котором абсолютная величина Vj является максимальной, при этом Vj представлена следующим уравнением:
в котором член Ej+Ej+1 представлен уравнением:
в котором ΔρK означает скачок плотности на границе nK, λK=(zK-zj)/h для приблизительной границы nK, а целое число j, соответствующее точке, в которой абсолютная величина Vj имеет максимальное значение, указывает, что граница nK пролегает между датчиками, находящимися на глубинах zs j и zs j+1.
| С.С.Ильина | |||
| Метод определения геологических границ среды в обратной задаче гравиметрии / Материалы XLVIII Международной научной студенческой конференции "Студент и научно-технический прогресс": Геология / Новосиб | |||
| гос | |||
| ун-т, Новосибирск, 2010, стр.40 | |||
| US 5821413 A, 13.10.1998 | |||
| US 4625547 A, 02.12.1986 | |||
| US 5218864 A, 15.06.1993. |

