ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к компоновке гибкого датчика тока.
УРОВЕНЬ ТЕХНИКИ
Гибкие катушки Роговского (как описано, например, в патенте США 3,434,052) обеспечивают удобный способ получения результатов измерения переменного тока в труднодоступных местах или в ситуациях временного контроля тока. С точки зрения точности они имеют недостаток, связанный с отсутствием возможности изготовления однородного и гибкого соленоида с высокой точностью, что ограничивает равномерность калибровочного коэффициента в измерительном контуре и ограничивает уровень непринятия, достигнутый для соседних токов вне контура. Это особенно справедливо вблизи точки, где соединены два конца гибкой катушки, так как должно быть выделено пространство для компоновок изоляции и механических зажимов. Другой нежелательной особенностью является сложность получения хорошей термостабильности в силу гибкости материалов, определяющих поперечное сечение катушки, и длины контура, что непосредственно влияет на чувствительность измерения тока.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В первом аспекте в данном описании описана компоновка гибкого датчика тока, содержащая множество дискретных токочувствительных элементов, распределенных вдоль удлиненного гибкого несущего элемента. Дискретные чувствительные элементы могут содержать катушки из проводящего материала, нанесенного на плоские печатные платы. Дискретные чувствительные элементы могут содержать множество витков проводящего материала, намотанных вокруг удлиненного гибкого несущего элемента. Дискретные чувствительные элементы могут содержать витки провода, намотанные на катушке, причем катушки распределены вдоль несущего элемента. Дискретные токочувствительные элементы могут быть электрически соединены последовательно друг с другом с помощью соединительных элементов. Соединительные элементы размещаются таким образом, чтобы они не увеличивали значительно (или совершенно) чувствительность компоновки датчиков. Другими словами, в вариантах осуществления, в которых каждый токочувствительный элемент содержит катушку с электропроводным материалом, соединительные элементы не вносят дополнительную "зону контура" в катушках.
Поперечное сечение каждого чувствительного элемента может иметь неравномерное соотношение размеров. Каждый чувствительный элемент выполнен таким образом, чтобы он проявлял нулевую чувствительность к однородным магнитным полям, которые параллельны плоскости датчика. Эта плоскость называется плоскостью нулевой чувствительности для однородных магнитных полей. Поперечное сечение чувствительного элемента, которое имеет неравномерное соотношение размеров, параллельно плоскости нулевой чувствительности чувствительного элемента. Поперечное сечение, имеющее неравномерное соотношение размеров, может представлять собой поперечное сечение, через которое проходит удлиненный гибкий несущий элемент.
Удлиненный гибкий несущий элемент можно выполнить таким образом, чтобы он имел предпочтительную ось сгибания. Удлиненный гибкий несущий элемент можно выполнить таким образом, чтобы он имел одну ось сгибания. Гибкость удлиненного гибкого несущего элемента в предпочтительной оси сгибания может быть асимметричной.
Компоновку гибкого датчика тока можно выполнить в виде открываемого контура. Когда компоновка выполнена в виде контура, противоположные концы гибкого несущего элемента могут лежать в одной и той же плоскости, как и оставшаяся часть несущего элемента.
Дискретные чувствительные элементы могут, по существу, располагаться эквидистантно вдоль удлиненного гибкого несущего элемента.
Компоновка гибкого датчика тока может содержать: первый соединительный элемент на первом конце удлиненного гибкого несущего элемента; и второй соединительный элемент на втором конце удлиненного гибкого несущего элемента, причем первый и второй соединительные элементы выполнены с возможностью разъемного зацепления друг с другом для образования компоновки датчика в замкнутом контуре, причем дискретные чувствительные элементы располагаются эквидистантно по замкнутому контуру. Другими словами, первый и второй соединительные элементы можно выполнить таким образом, чтобы при зацеплении друг с другом чувствительные элементы на любом конце несущего элемента были расположены на том же расстоянии друг от друга, как и другие расположенные эквидистантно чувствительные элементы.
Удлиненный гибкий несущий элемент может проходить через центральную область каждого из токочувствительных элементов.
Компоновку гибкого датчика тока можно выполнить таким образом, чтобы плоскость нулевой чувствительности каждого чувствительного элемента была, по существу, локально перпендикулярна к продольной оси участка несущего элемента, на котором он переносится.
Удлиненный гибкий несущий элемент может содержать множество связанных участков несущего элемента, причем каждый из участков несущего элемента выполнен с возможностью приема, по меньшей мере, одного токочувствительного элемента.
Каждый из участков несущего элемента может содержать катушечную часть для приема одного из дискретных чувствительных элементов. Дискретные чувствительные элементы могут содержать множество витков медного провода, намотанного на катушечную часть. Множество связанных участков несущего элемента может быть связано друг с другом с помощью шарнирных участков. Множество связанных участков несущего элемента может быть связано с возможностью отсоединения друг с другом с помощью шарнирных участков. Шарнирные участки можно выполнить таким образом, чтобы минимизировать изменение при разнесении центров соседних элементов датчика в случае, когда элементы вращаются вокруг шарнирных участков. Шарнирные участки могут быть смещены относительно предпочтительного направления изгиба гибкого удлиненного несущего элемента.
Дискретные токочувствительные элементы могут содержать катушки на печатных платах, установленные по центру на удлиненном гибком несущем элементе.
Во втором аспекте в данном описании описан удлиненный гибкий элемент для компоновки датчиков тока, причем удлиненный гибкий элемент содержит множество несущих участков, связанных друг с другом с помощью шарнирных участков, причем каждый несущий участок выполнен с возможностью приема дискретного токочувствительного элемента.
В третьем аспекте в данном описании описан способ изготовления компоновки гибкого датчика тока, причем способ содержит этапы, на которых: выполняют удлиненный гибкий несущий элемент; и распределяют множество дискретных чувствительных элементов вдоль удлиненного гибкого несущего элемента.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для более полного понимания вариантов осуществления настоящего изобретения теперь дана ссылка на последующее описание, приведенное совместно с сопроводительными чертежами, на которых:
фигуры 1A-1E - схематичные иллюстрации различных аспектов данной компоновки гибкого датчика тока согласно изобретению;
фигуры 2А-2D - схематичные иллюстрации различных аспектов альтернативной компоновки гибкого датчика тока согласно изобретению;
фигура 3 - схематичная иллюстрация варианта компоновки гибкого датчика тока (фигуры 2A-2D);
фигуры 4А-4F иллюстрируют различные аспекты удлиненного гибкого несущего элемента, который можно использовать для образования компоновки гибкого датчика, аналогичной той, которая описана со ссылкой на фигуры 1A-1E;
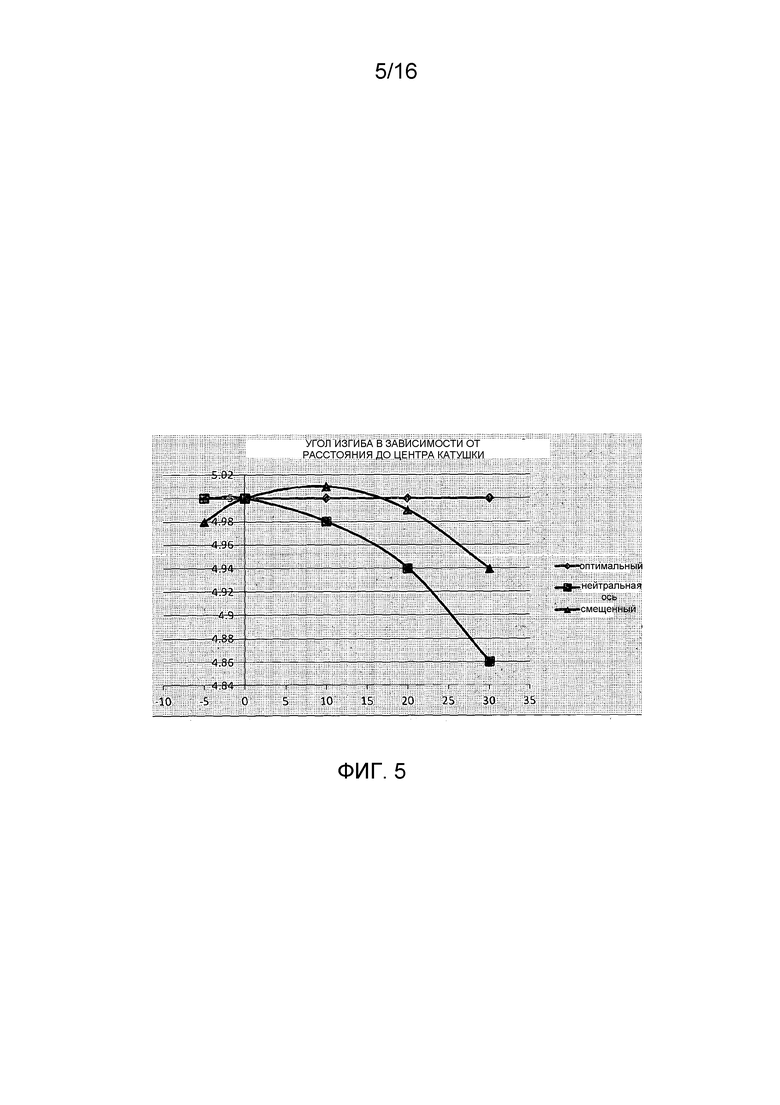
фигура 5 - график, иллюстрирующий аспект удлиненного гибкого несущего элемента (фигуры 4А-4F);
фигуры 6А-6Е - удлиненный гибкий несущий элемент (фигуры 4А-4F), который используется совместно с соединительным механизмом, описанным со ссылкой на фигуры 1A-1E;
фигуры 7А-7D иллюстрируют аспекты варианта удлиненного гибкого несущего элемента, описанного со ссылкой на фигуры 4А-4F;
фигуры 8А-8H иллюстрируют различные аспекты альтернативного удлиненного гибкого несущего элемента, который можно использовать для образования компоновки гибкого датчика, аналогичной той, которая описана со ссылкой на фигуры 1A-1E;
фигуры 9А-9Е - удлиненный гибкий несущий элемент (фигуры 8А-8H), который используется совместно с соединительным механизмом, описанным со ссылкой на фигуры 1A-1E;
фигуры 10A и 10В иллюстрируют аспекты варианта удлиненного гибкого несущего элемента (фигуры 8А-8H);
фигуры 11A-11I иллюстрируют аспекты альтернативного варианта удлиненного гибкого несущего элемента фигуры 8А-8H;
фигуры 12А и 12В иллюстрируют аспекты варианта удлиненного гибкого несущего элемента, описанного со ссылкой на фигуры 4А-4F;
фигуры 13А и 13В иллюстрируют аспекты варианта удлиненного гибкого несущего элемента, описанного со ссылкой на фигуры 8А-8H;
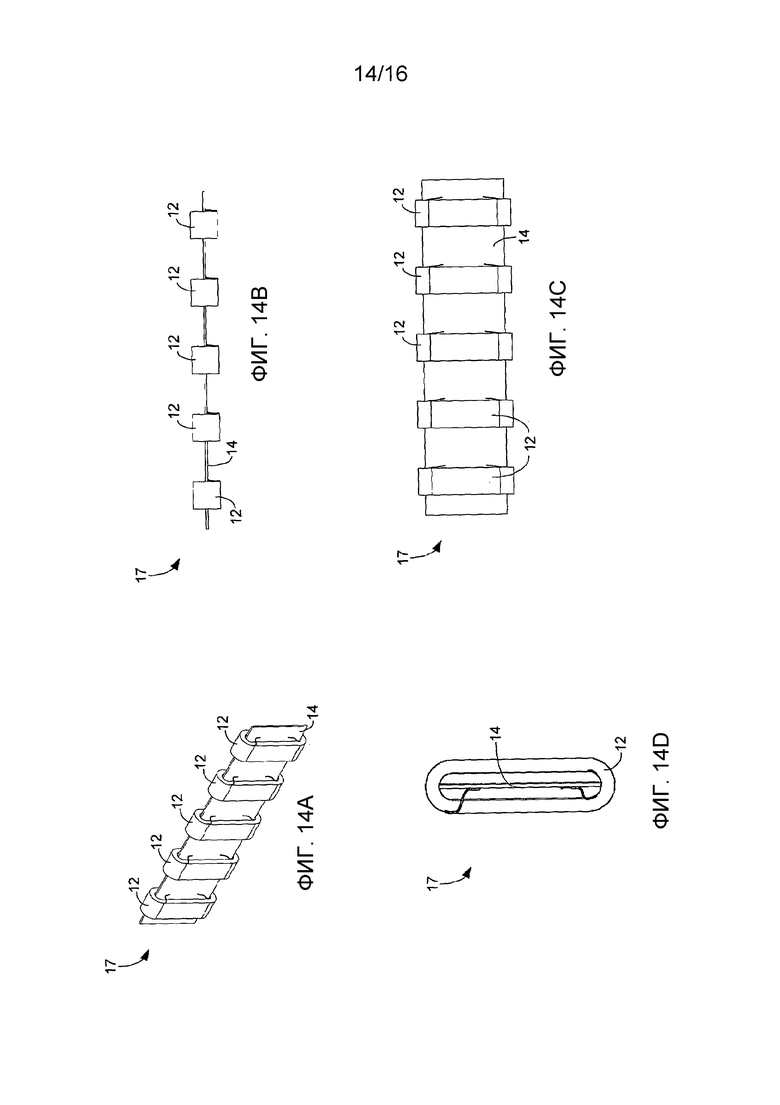
фигуры 14А-14D иллюстрируют аспекты варианта компоновки гибкого датчика тока (фигуры 1A-1E);
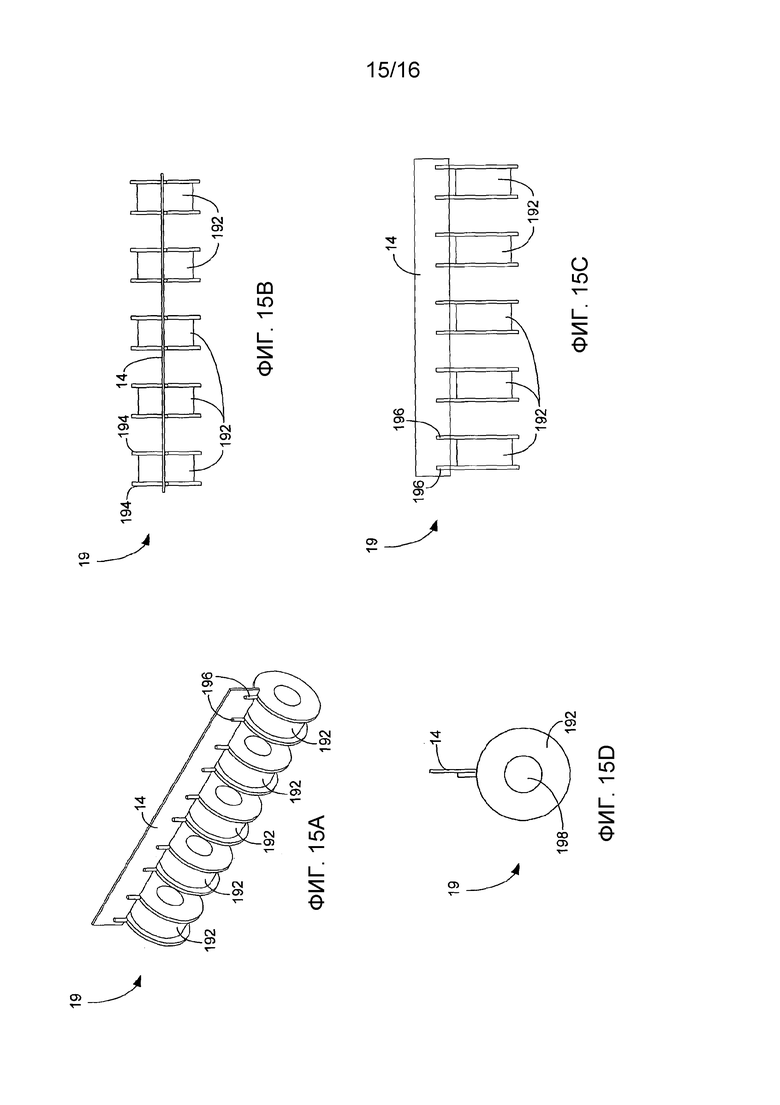
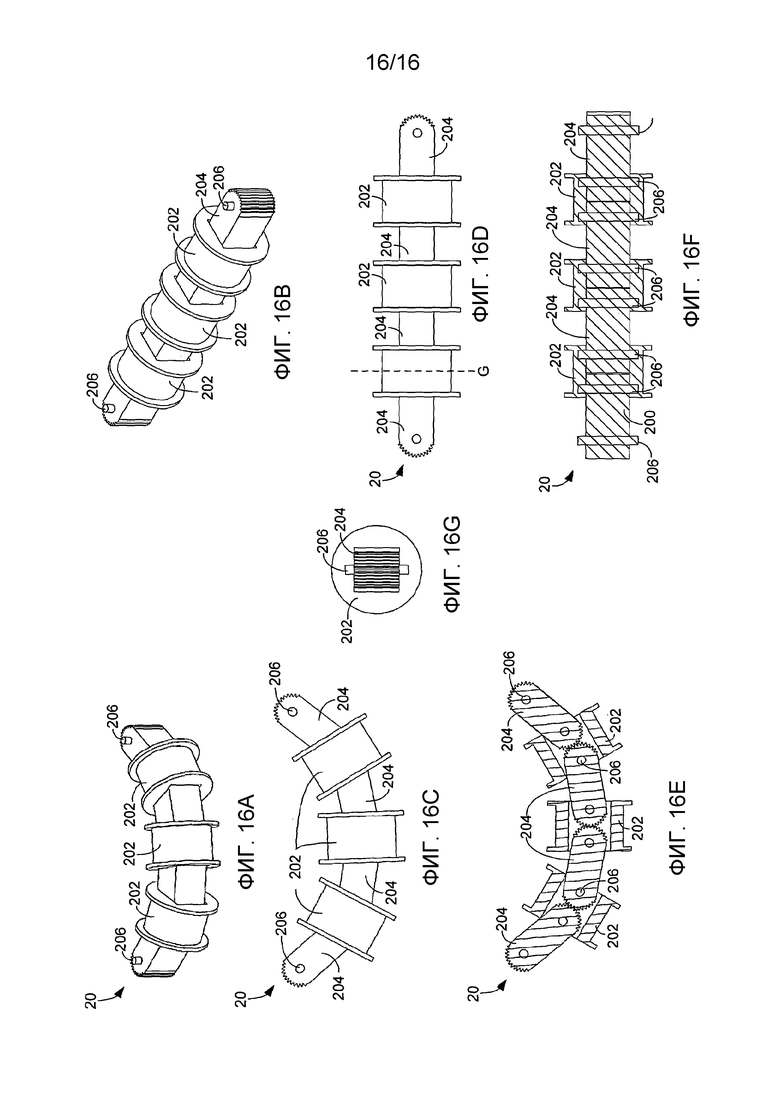
фигуры 15A-15D иллюстрируют аспекты альтернативного удлиненного гибкого несущего элемента; и фигуры 16а-16G иллюстрируют аспекты другого альтернативного удлиненного гибкого несущего элемента.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
На всем протяжении описания и на чертежах одинаковые ссылочные позиции относятся к одинаковым элементам.
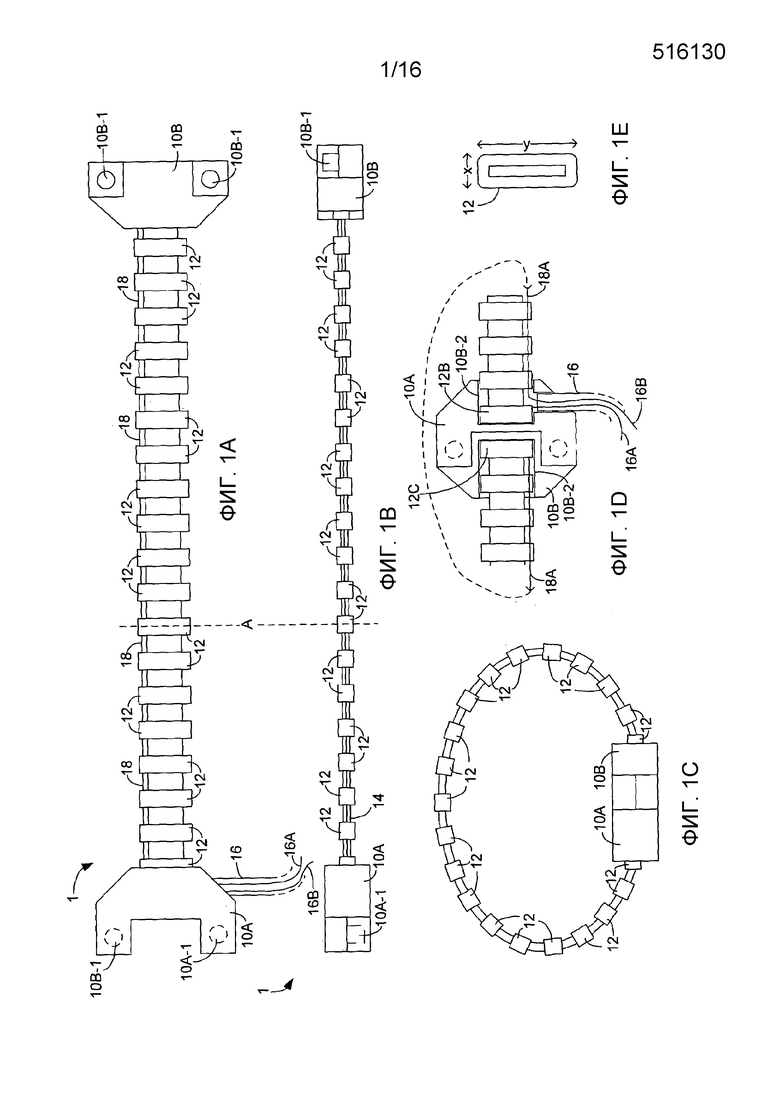
На фигурах 1A-1E изображены схематичные иллюстрации различных аспектов данной компоновки 1 гибкого датчика тока согласно изобретению. Компоновка 1 гибкого датчика тока выполнена в виде замкнутого контура. Во время использования гибкий датчик образован в виде замкнутого контура, окружающего проводник (такой, как в электрической подстанции), в котором требуется измерять ток.
На фигурах 1А и 1B изображены вид сбоку и вид сверху соответственно компоновки 1 гибкого датчика тока, когда она находится в открытом виде, и на фигуре 1C изображен вид сверху компоновки 1, когда она находится в виде замкнутого контура. На фигуре 1D изображен схематичный вид в поперечном сечении через соединительный механизм 10А, 10В компоновки 1, когда она находится в замкнутом виде. На фигуре 1E изображен вид в разрезе дискретного чувствительного элемента 12 компоновки 1.
Компоновка 1 гибкого датчика тока согласно изобретению содержит множество дискретных токочувствительных элементов 12, распределенных или расположенных вдоль удлиненного гибкого несущего элемента 14. Дискретные токочувствительные элементы 12 равномерно расположены вдоль длины гибкого несущего элемента 14. Множество дискретных токочувствительных элементов 12 можно называть как цепочка.
Каждый из дискретных токочувствительных элементов 12 содержит многочисленные витки проводящего материала. В примере, показанном на фигуре 1, дискретные токочувствительные элементы 12 содержат катушки с медным проводом. Однако, как будет понятно из других вариантов осуществления, дискретные токочувствительные элементы 12 могут вместо этого содержать, например, многочисленные витки проводящего материала, напечатанного на печатной плате (PCB). В других примерах чувствительные элементы 12 могут содержать предварительно намотанные катушки, выполненные на бобинах или самоподдерживающихся сердечниках. Каждый из дискретных чувствительных элементов 12, по существу, идентичен каждому другому чувствительному элементу 12. Кроме этого, направление намотки каждого из чувствительных элементов 12 является одинаковым. Таким образом, токи, которые наводятся в каждом из чувствительных элементов 12 с помощью переменного вращающегося магнитного поля (например, которое будет вызвано переменным током, протекающим в проводе), складываются друг с другом.
Дискретные токочувствительные элементы 12 выполнены таким образом, чтобы они не были чувствительными к однородным магнитным полям, которые параллельны определенной плоскости. Эта плоскость будет в дальнейшем называться плоскостью нулевой чувствительности для однородных магнитных полей. Плоскость нулевой чувствительности для однородных магнитных полей для одного из дискретных чувствительных элементов 12 показана на фигурах 1А и 1В с помощью пунктирной линии, обозначенной ссылочной позицией А. Эта конфигурация достигается путем выполнения всех витков проводящего материала чувствительного элемента в одной и той же плоскости или в плоскостях, которые, по существу, параллельны друг другу. Плоскость, в которой витки выполнены (или в которой витки параллельны), представляет собой также плоскость нулевой чувствительности для однородных магнитных полей чувствительных элементов 12.
Компоновка 1 гибкого датчика тока выполнена таким образом, чтобы плоскость нулевой чувствительности каждого чувствительного элемента 1 была, по существу, перпендикулярна к продольной оси участка несущего элемента, на котором он переносится.
В этом примере дискретные чувствительные элементы 12 выполнены таким образом, чтобы соотношение размеров поперечного сечения через плоскость нулевой чувствительности было неравномерным. Это можно увидеть на фигуре 1E, на которой высота дискретного чувствительного элемента 12 (обозначенная "Y") длиннее, чем ширина (обозначенная "X") чувствительного элемента 12. В некоторых примерах, которые изображены на фигурах, форма поперечного сечения дискретных чувствительных элементов 12 является, по существу, прямоугольной. Это позволяет обеспечить относительно низкую толщину компоновки 1 гибкого датчика (чтобы компоновка могла пройти в закрепленных проводниках через маленькие промежутки) без ущерба для площади катушки дискретных чувствительных элементов 12. В других примерах дискретные чувствительные элементы 12 могут иметь одинаковое соотношение размеров поперечного сечения.
Дискретные чувствительные элементы 12 распределены на гибком удлиненном несущем элементе 14 таким образом, чтобы их плоскости нулевой чувствительности были, по существу, перпендикулярны к продольной оси участка несущего элемента, на котором выполнен чувствительный элемент. В примере, показанном на фигурах 1A-1D, и в примерах, показанных на фигурах 2-11, удлиненный гибкий несущий элемент 14 проходит через центральную область дискретного чувствительного элемента 12. В примерах, в которых дискретные чувствительные элементы 12 содержат катушки с проводом, провод, можно сказать, наматывается на удлиненный гибкий несущий элемент 14. Это можно достичь с помощью предварительного формирования катушек с проводом и затем впоследствии пропускания удлиненного гибкого несущего элемента через центральную область 12А катушки или, альтернативно, путем намотки катушек непосредственно на удлиненный гибкий несущий элемент 14.
Дискретные чувствительные элементы 12 электрически соединены последовательно друг с другом. Дискретные чувствительные элементы 12 электрически соединены друг с другом с помощью электрических соединительных элементов 18. В примерах, в которых удлиненный несущий элемент 14 проходит через дискретные чувствительные элементы 12 или в которых дискретные чувствительные элементы 12 наматываются отдельно на несущем элементе 14, дискретные чувствительные элементы 12 можно электрически подсоединить друг к другу после пропускания или намотки на несущем элементе 14. В других примерах, например, когда многочисленные дискретные чувствительные элементы 12 наматываются на несущий элемент из одной протяженности проводящего материала, дискретные чувствительные элементы 12 не требуют последующего электрического соединения друг с другом.
Электрические соединительные элементы 18 размещаются таким образом, чтобы они значительно не влияли на чувствительность компоновки 1 датчика. Другими словами, в вариантах осуществления, в которых каждый токочувствительный элемент 12 содержит многочисленные витки электропроводного материала, соединительные элементы 18 не вносят дополнительные "зоны контура" в чувствительные элементы 12. Это можно достичь путем выполнения электрических соединительных элементов 18 таким образом, чтобы они были, по существу, параллельны продольной оси удлиненного несущего элемента 12. Таким образом, даже в том случае, когда множество дискретных чувствительных элементов 12 можно сформировать из одной протяженности провода, чувствительные элементы 12, можно сказать, будут дискретными в том смысле, что только чувствительные элементы 12, а не соединительные элементы 18 имеют влияние на чувствительность компоновки. Напротив, в компоновках датчиков, таких, например, как в патенте США №3,434,052, вся длина соленоида вносит вклад в чувствительность компоновки.
Электрические соединительные элементы 18, по существу, не влияют на чувствительность компоновки 1 во внешних магнитных полях, так как чувствительность каждого соединительного элемента 18 в таких полях компенсируется чувствительностью соединительного элемента на противоположной стороне замкнутого контура.
Удлиненный гибкий несущий элемент 14 является стабильным и предпочтительно имеет высокое абсолютное значение вдоль своей длины. Это позволяет избежать растягивания датчика во время установки или обращения с ним или изменения его длины с течением времени. Кроме этого удлиненный гибкий несущий элемент 14 имеет низкий термический коэффициент вдоль своей длины. В идеальном случае термический коэффициент удлиненного гибкого несущего элемента 14 превышает в два раза линейный температурный коэффициент дискретных чувствительных элементов 12.
Удлиненный гибкий несущий элемент 14 выполнен таким образом, чтобы он имел предпочтительную ось сгибания. Иными словами, может потребоваться меньшее усилие для сгибания удлиненного несущего элемента 14 вокруг предпочтительной оси по сравнению со сгибанием удлиненного несущего элемента 14 вокруг непредпочтительной оси. В некоторых вариантах осуществления удлиненный гибкий элемент может изгибаться только вокруг одной оси. В примере, показанном на фигуре 1A, предпочтительная ось сгибания параллельна странице. На фигуре 1B предпочтительная ось сгибания перпендикулярна к странице. Предпочтительно, удлиненный несущий элемент 14 может иметь только ограниченное количество изгибов.
В примере, показанном на фигурах 1A-1E, удлиненный гибкий несущий элемент 14 содержит, по существу, плоскую полоску гибкого материала. Таким образом, длина и ширина несущего элемента 14 значительно больше, чем толщина несущего элемента. Подходящие материалы для плоского гибкого несущего элемента 18, например, такие, которые показаны на фигурах 1A-1E, включают в себя тонкий материал печатной платы (например, тонкий FR4 или полиамид), немагнитную металлическую пружинную полоску (например, бериллиево-медная полоска максимальной твердости). В некоторых примерах несущий элемент 14 может быть выполнен из многослойного материала. Например, несущий элемент 14 может содержать два слоя резины, армированной волокном между двумя слоями резины. Армирующее волокно может содержать, например, стекло, полиамид, углерод или HDPE. В идеальном случае волокна оптимальным образом выровнены вдоль длины несущего элемента, хотя они могут лежать в обоих направлениях. В других примерах несущий элемент 14 может содержать два слоя резины со слоем тонкой немагнитной металлической полоски (или сетки), выполненной между слоями резины.
Как упомянуто выше, компоновку 1 гибкого датчика тока можно выполнить в виде замкнутого контура. Это можно увидеть на фигуре 1C. Контур может быть разомкнутым и замкнутым, как это требуется, для установки и удаления компоновки 1 гибкого датчика вокруг/с закрепленных проводников. Это достигается путем выполнения первого и второго соединительных элементов 10А, 10В контура соединительного механизма на соответствующих концах удлиненного гибкого несущего элемента 14. Первый и второй соединительные элементы 10А, 10В контура выполнены с возможностью разъемного соединения или зацепления друг с другом. Первый и второй соединительные элементы 10А, 10В контура имеют соответствующие формы так, чтобы они подходили друг другу. Более конкретно, первый из соединительных элементов 10В контура включает в себя, по меньшей мере, один выступ 10B-1, и второй из соединительных элементов 10А контура включает в себя соответствующее число отверстий 10А-1, которые принимают, по меньшей мере, один выступ 10В-1. Предпочтительно соединительный механизм включает в себя, по меньшей мере, два выступа 10В-1 и, по меньшей мере, два соответствующих отверстия 10А-1. Это ограничивает величину, на которую первый и второй соединительные элементы 10А, 10В контура могут вращаться относительно друг друга. В примере, показанном на фигурах 1а-1е, соединительный механизм 10А, 10В контура содержит два выступа 10В-1 и два соответствующих отверстия 10А-1. Размеры выступов 10В-1 и соответствующих отверстий 10А-1 являются такими, чтобы трение между соединительными элементами 10А, 10В контура удерживало элементы в своем соединенном состоянии до тех пор, пока не потребуется разъединить их с усилием. В некоторых примерах соединительные элементы 10A, 10В контура могут включать в себя дополнительный запорный механизм (не показан) для гарантии того, чтобы соединительные элементы 10A, 10В контура не разъединились друг от друга до тех пор, пока это не потребуется.
На фигуре 1D изображено схематичное поперечное сечение через соединительный механизм 10А, 10В в случае, когда соединительные элементы 10А, 10В контура соединены друг с другом. Первый и второй соединительные элементы 10А, 10В контура выполнены таким образом, чтобы тогда, когда они соединены, расстояние между чувствительными элементами 12b, 12с на каждом конце несущего элемента 14 были, по существу, предпочтительно точно такими же, как и расстояние между каждым чувствительным элементом 12 на несущем элементе 14 и ближайшим от него соседним элементом (соседними элементами). Кроме этого соединительный механизм 10А, 10В контура выполнен таким образом, чтобы при соединении для образования контура все дискретные чувствительные элементы 12 в контуре были выполнены в одной плоскости. В примере, показанном на фигуре 1C, эти характеристики достигаются путем приема концов несущего элемента 14, а также чувствительных элементов 12В, 12С, выполненных на нем, внутри отверстий 10А-2, 10В-2, образованных в соединительных элементах 10А, 10В контура. Чувствительные элементы 12В, 12С, принятые в отверстиях 10А-2, 10В-2, примыкают к торцевым стенкам своих соответствующих отверстий 10А-2, 10В-2. Толщина торцевой стенки равна половине промежутка между соседними чувствительными элементами 12b, 12с. Соединительные элементы 10A, 10В контура выполнены таким образом, чтобы при их соединении торцевые стенки отверстий 10А-2, 10В-2 примыкали друг к другу.
Компоновка 1 гибкого датчика тока содержит выходной кабель 16, который включает в себя первый и второй сигнальные провода 16А, 16В. В примере, показанном на фигурах 1A - 1E, выходной кабель выступает из одного из соединительных элементов 10А контура. Первый из сигнальных проводов 16A непосредственно электрически соединен с первым из дискретных чувствительных элементов 12b. Второй сигнальный провод 16B непосредственно электрически соединен с последним из дискретных чувствительных элементов 12b. В данном случае термины "первый" и "последний" относятся к электрическому положению, а не к физическому положению в цепочке последовательно соединенных чувствительных элементов 18. Другими словами, первый и последний чувствительные элементы 12B, 12C в цепочке представляют собой те, которые непосредственно электрически соединены только с одним другим чувствительным элементом 12. В примере, показанном на фигурах 1A-1D, первый и последний чувствительные элементы 12В, 12С представляют собой те элементы, которые приняты в соединительных элементах 10А, 10В контура. Как схематично показано на фигуре 1D, ответный электрический соединительный элемент 18А непосредственно электрически соединяет последний чувствительный элемент 12С в цепочке чувствительных элементов 12 с выходным кабелем 16.
Хотя в примере, показанном на фигурах 1А-1Е, удлиненный гибкий несущий элемент 14 содержит плоскую полоску гибкого материала, следует иметь в виду, что плоскую полоску материала можно заменить любым из удлиненных гибких несущих элементов, описанных ниже со ссылкой на фигуры 4-11.
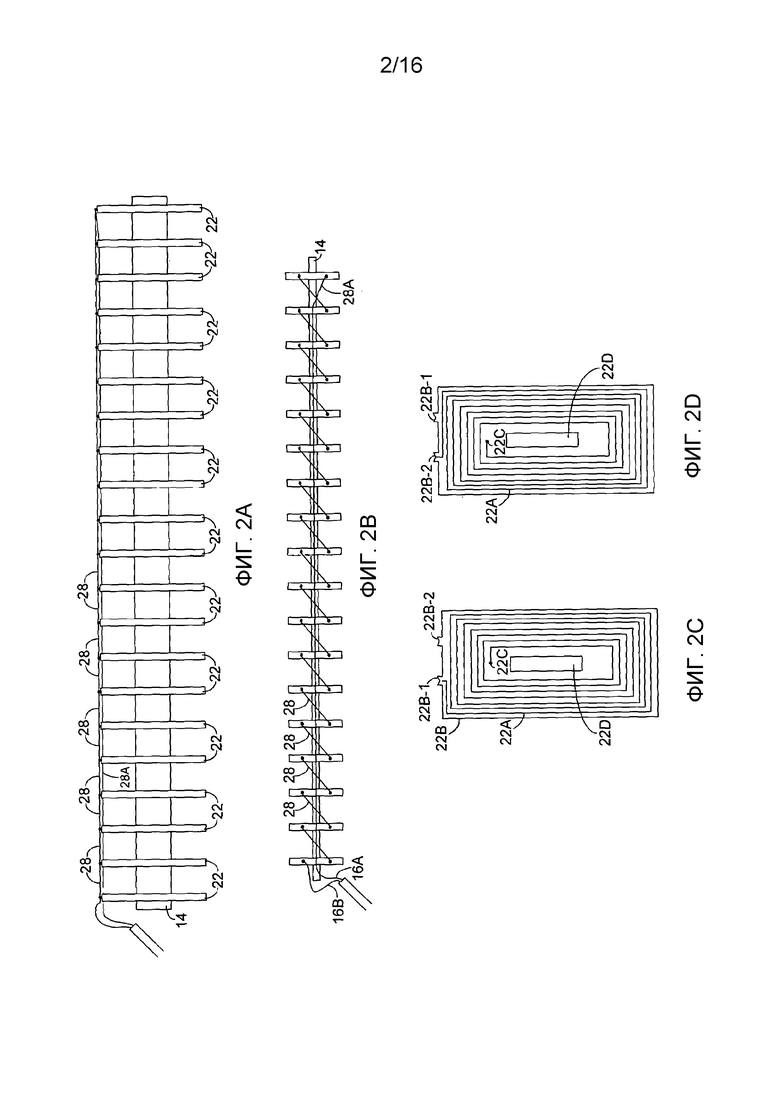
На фигурах 2А-2D изображены схематичные иллюстрации различных аспектов альтернативной компоновки 2 датчика тока в соответствии с примерами изобретения. Многие свойства компоновки 2 датчика, показанной на фигурах 2А-2D, являются, по существу, такими же, как и свойства компоновки 2 датчика, описанной со ссылкой на фигуры 1А-1Е. Таким образом, не все из этих свойств будут описаны снова со ссылкой на фигуры 2A-2D. Вместо этого приведенное ниже описание будет сосредоточено, прежде всего, на различиях между двумя компоновками датчиков. На фигурах 2А и 2В показаны вид сбоку и вид сверху компоновки 2 гибкого датчика тока. На фигурах 2С и 2D изображены виды сверху противоположных поверхностей элемента 22 дискретного датчика компоновки 2.
В примере, показанном на фигурах 2А-2D, дискретные чувствительные элементы 22 содержат токопроводящую дорожку 22А, образованную множеством витков проводящего материала, осажденного на плоскую печатную плату 22В. Как и в случае компоновки 1, описанной со ссылкой на фигуры 1А-1Е, чувствительные элементы 22 (фигура 2) расположены эквидистантно вдоль несущего элемента 14. Несущий элемент 1 является, по существу, таким, как описано со ссылкой на фигуры 1A-1D.
В примере, показанном на фигурах 2А-2D, проводящая дорожка 22А выполнена на обеих сторонах РСВ 22B. Проводящие дорожки 22А на каждой стороне РСВ 22B соединены с помощью сквозного соединения 22С. Витки токопроводящих дорожек 22А на каждой стороне печатной платы 22B намотаны в противоположных направлениях. Таким образом, сигналы, которые наводятся в дорожках 22А на каждой стороне печатной платы 22В с помощью изменяющегося магнитного поля, перпендикулярного к плоскости дорожек 22A, обязательно суммируются.
Как и в примере, показанном на фигурах 1А-1Е, удлиненный гибкий несущий элемент 14 проходит через центральную область 22D дискретного чувствительного элемента 22. В этом примере центральная область 22D имеет форму щели. Кроме этого соотношение размеров витков проводящего материала является неравномерным. Размер РСВ 22В в направлении предпочтительного сгибания или изгиба несущего элемента меньше, чем размер в перпендикулярном направлении. Это позволяет вставить датчик через меньшие зазоры. В добавление к этому, это позволяет минимизировать влияние на чувствительность внутри или снаружи контура при изменении формы контура.
Печатная плата включает в себя два выступа 22B-1, 22B-2, к которым можно прикрепить элементы 28 электрического соединения для последовательного электрического соединения дискретных чувствительных элементов 22. В этом примере выступы 22B-1, 22B-2 выступают наружу от концевой кромки РСВ 22B. Противоположные концы проводящего материала чувствительного элемента 22 находятся в прямом электрическом соединении с другими концами выступов. В этом примере выступы 22B-1, 22B-2 выполнены таким образом, чтобы обеспечить более легкое физическое соединение элементов 28 электрического соединения с выступами 22B-1, 22В-2.
Как можно увидеть на фигурах 2С и 2D, выступы 22B-1, 22B-2 разнесены. Это позволяет пропускать ответный соединительный элемент 28А, который непосредственно электрически соединяет последний чувствительный элемент 22 в цепочке (в этом примере справа на фигуре 2A) с выходным кабелем 16, через область между выступами 22В-1, 22B-2. Таким образом, провод 28А ответного соединительного элемента не мешает элементам 28 электрического соединения, которые соединяют последовательно дискретные чувствительные элементы 22.
Хотя на фигурах 2А-2D это не показано, эта примерная компоновка 2 также включает в себя соединительный механизм, который выполнен аналогично тому, который показан из фигурах 1A-1D, для того, чтобы разделить первый и последний чувствительные элементы в компоновке на промежуточное расстояние от других чувствительных элементов 22 в цепочке.
В одном конкретном примере, свойства различных частей компоновки 2 гибкого датчика могут быть следующими:
- внешние размеры проводящей дорожки 22А = 9,5 мм × 24 мм;
- ширина проводящей дорожки 22А = 0,15 мм;
- 10 витков проводящей дорожки на каждой стороне печатной платы 22В;
- размеры центральный области/внутренней щели = 1,6 мм × 14 мм;
- 53 дискретных чувствительных элемента 22, расположенных вдоль удлиненного гибкого несущего элемента с разделения на 4,4 мм;
- материал удлиненного гибкого несущего элемента = резиновый ламинат, армированный волокном;
- размеры удлиненного гибкого несущего элемента = 1,6 мм × 14 мм × 233 мм;
Компоновка 1 гибкого датчика выполнена таким образом, чтобы достичь чувствительности 0,25 мВ/А при 50 Ом.
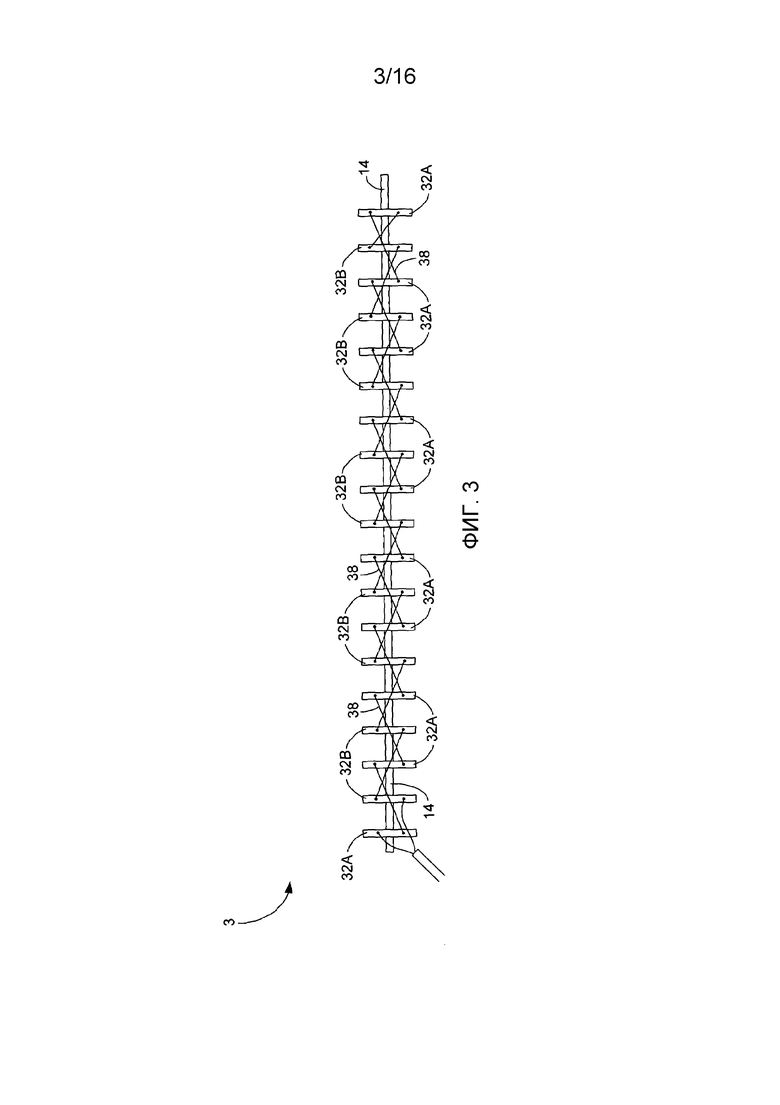
На фигуре 3 показана компоновка 3 датчика, которая аналогична той, которая показана на фигурах 2А-2D. Основное отличие состоит в том, что элементы дискретных датчиков соединены различным образом. Более конкретно, каждый чувствительный элемент непосредственно электрически подсоединен не к соседнему элементу, а к следующему, но одному чувствительному элементу 32А, 32В. Дискретные чувствительные элементы 32А, 32В (фигура 3) можно все еще рассматривать как одиночную последовательно соединенную цепочку. Однако в этом примере цепочка эффективно сложена пополам. Одно преимущество этой компоновки 3 заключается в том, что не требуется возвратный провод от одного конца удлиненного несущего элемента 14 до другого. Другим преимуществом является то, что емкостная связь от кабеля обеспечивает, в основном, одинаковую связь с чувствительными элементами, которые находятся рядом с положительным и отрицательным выводом, тем самым уменьшая потребность в электростатическом экране вокруг датчика.
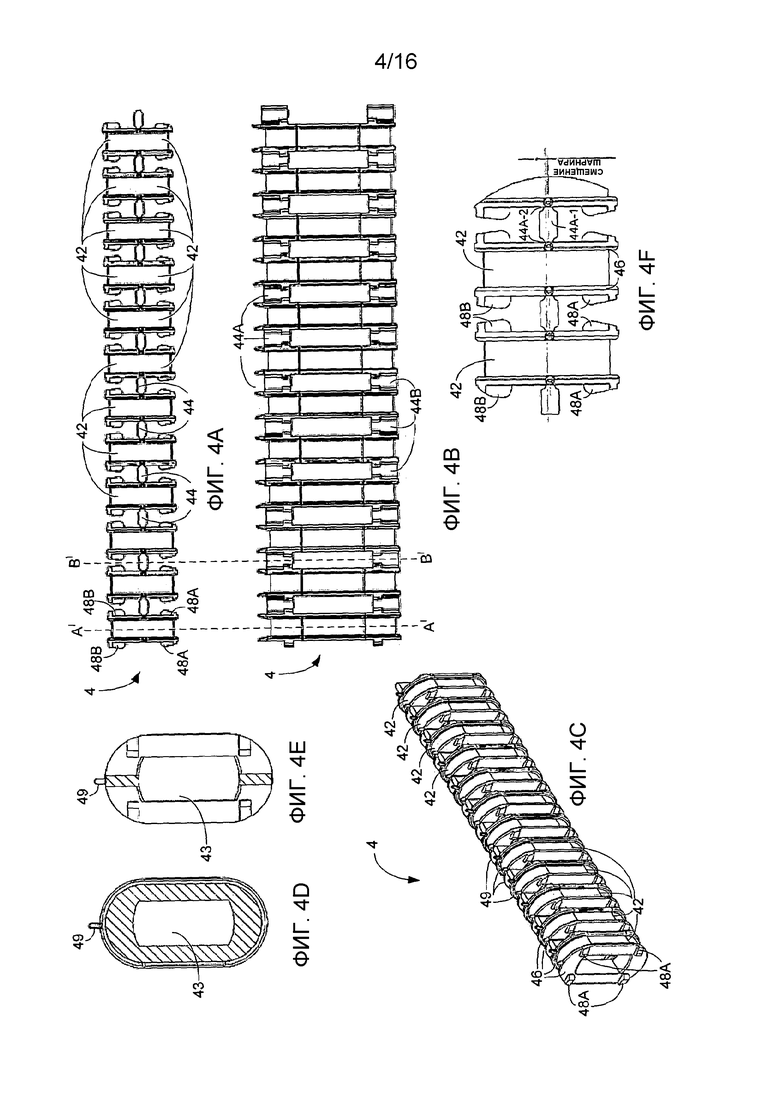
На фигурах 4А-4F показаны различные аспекты удлиненного гибкого несущего элемента 4, которые могут образовывать часть компоновки датчика, которая аналогична той, которая описана со ссылкой на фигуры 1A-1E. На фигурах 4А, 4В и 4С изображены вид сверху, вид сбоку и общий вид соответственно удлиненного гибкого несущего элемента 4. На фигурах 4D и 4E изображены виды в поперечном сечении через несущий элемент 4. На фигуре 4F изображен увеличенный вид сверху шарнирного участка несущего элемента 4. На фигурах 4А-4F не показаны дискретные элементы датчика и элементы электрического соединения. Однако они могут быть, по существу, такими же, как описано со ссылкой на фигуры 1A-1E.
Гибкий удлиненный несущий элемент 4 содержит множество участков 42, несущих дискретный чувствительный элемент. В этом примере множество участков 42, несущих дискретный чувствительный элемент, каждый из которых содержит катушку 42, вокруг которой можно намотать токопроводящий провод (на фигуре 4 не показан) для образования дискретного чувствительного элемента. Провод, используемый для образования чувствительных элементов, является изолированным. Несущие участки 42 содержат фланцы 46 на каждом своем конце. Это гарантирует, что проводящий провод удерживается на несущем участке 42. Несущие участки 42 расположены на одинаковом расстоянии друг от друга вдоль длины несущего элемента 4. Каждый из участков 42, несущих дискретный чувствительный элемент, имеет неравномерное соотношение размеров (как можно видеть на фигуре 4D, на котором показан разрез через пунктирную линию, отмеченную А' на фигурах 4А и 4В). Следовательно, когда проводящий провод намотан на несущий участок 42, полученные в результате дискретные чувствительные элементы также имеют неравномерное соотношение размеров.
В одном конкретном примере несущие участки 42 выполнены таким образом, чтобы дискретные чувствительные элементы имели ширину 2 мм и имели два слоя намотки. При использовании эмалированного медного провода диаметром 0,1 мм, это приводит к 40 виткам на один дискретный чувствительный элемент.
Каждый из множества участков 42, несущих дискретный чувствительный элемент, связан, по меньшей мере, с одним другим из несущих участков 42 с помощью шарнирного участка 44. Шарнирные участки постоянно соединены с несущими участками. Таким образом, в этом примере соседние несущие участки 42 нельзя отсоединить друг от друга без повреждения несущего элемента 4. Шарнирные участки выровнены друг с другом. Шарнирные участки 42 выполнены таким образом, чтобы несущие участки могли вращаться относительно друг друга, тем самым позволяя изгибаться удлиненному гибкому несущему элементу. Шарнирный участок 44 содержит первый и второй шарнир 44А, 44В. Первый и второй шарнирные участки 44А, 44В расположены напротив друг друга поперек продольной оси удлиненного несущего элемента 4. Это побуждает удлиненный гибкий несущий элемент 4 изгибаться только вокруг одной оси. Несущие участки 42 являются жесткими по сравнению с шарнирными участками 44. Таким образом, удлиненный гибкий несущий элемент 4 изгибается на шарнирном участке 44, а не на несущем участке 42. Хотя пример, показанный на фигурах 4А-4F, включает в себя два шарнира 44A и 44B, в некоторых примерах несущий участок может быть соединен с помощью одного шарнирного участка.
Каждый из несущих участков 42 включает в себя две пары выступов 48A, 48B на каждой своей стороне. Выступы на каждой стороне несущего участка проходят в направлении соседнего несущего участка 42. Пары выступов 48A, 48B расположены на противоположных сторонах продольной оси несущего элемента 4 относительно друг от друга. Пары выступов 48A, 48B расположены на противоположных сторонах шарнирных участков 44А, 44В относительно друг от друга. Выступы 44А, 44В выполнены для того, чтобы ограничить величину, на которую могут поворачиваться соседние несущие элементы 4 относительно шарнирного участка 44. Причина состоит в том, что, после того как угол поворота достигает конкретной величины угла, выступы конкретной пары 48А, 48Б на соседних несущих участках 42 входят в физический контакт, тем самым ограничивая дальнейший поворот.
В примере, показанном на фигурах 4А-4С, первая пара выступов 44В проходит от стороны несущего участка 42 в направлении соседнего несущего участка 42 дальше, чем вторая пара выступов 44А. Таким образом, разделение между первыми парами выступов 44В на соседних несущих участках 42 меньше, чем разделение между вторыми парами выступов 44А. Это хорошо видно на фигуре 4F. Следовательно, несущий элемент 4 может изгибаться в одном направлении относительно оси сгибания дальше, чем в другом. Это снижает вероятность того, что компоновка датчика будет установлена неправильно. Ограничение возможного угла поворота в предпочтительном направлении сгибания означает, что можно минимизировать изменение в межцентровом расстоянии дискретных чувствительных элементов. В одном специфическом варианте осуществления угол изгиба в предпочтительном направлении сгибания можно ограничить до 20° и до 5° в противоположном направлении.
Как можно увидеть на фигуре 4F, каждый из шарниров 44А, 44В содержит утолщенный участок 44А-1, добавленный на каждом конце с помощью более тонкого участка 44А-2. Шарниры 44А, 44В соединены с несущими участками 42 на каждом конце с помощью более тонких шарнирных участков 44A-2. Это означает, что шарниры являются более гибкими в соединении с несущим участком, который находится посередине шарнира. Следовательно, эффективные точки поворота каждого шарнира сдвигаются в направлении несущих участков 42 и поэтому также в направлении центра дискретных чувствительных элементов, выполненных на них. Это позволяет уменьшить изменение расстояния между центрами чувствительных элементов, когда несущие участки 42 поворачиваются относительно своих петель. Это позволяет повысить характеристики компоновки датчика.
Кроме этого, как видно на фигуре 4F, каждый из шарниров 44A, 44B сдвинут относительно центра несущего участка в направлении предпочтительного сгибания удлиненного гибкого несущего элемента. Другими словами, шарниры 44А, 44В сдвинуты относительно продольной оси в направлении вторых пар выступов 44А (которые проходят немного ближе от несущего участка, чем первые пары выступов 44В). Они служат для сохранения расстояния в среднем между центрами каждого из дискретных чувствительных элементов ближе к постоянному значению. Это показано на фигуре 5.
На фигуре 5 изображен график угла поворота соседних несущих участков 42 (по оси х) в зависимости от межцентрового расстояния несущих участков и поэтому также от межцентрового расстояния дискретных чувствительных элементов, переносимых на них. Пологая кривая (с метками в форме ромбов) показывает идеальную ситуацию, в которой межцентровое расстояние не изменяется в зависимости от угла поворота. Крутая кривая (с отметками в форме квадратов) показывает изменение в межцентровом расстоянии в случае, когда шарнир выровнен с продольной осью несущего элемента. Окончательная кривая (с метками в форме треугольников) показывает изменение в межцентровом расстоянии со смещенным шарниром, как показано на фигуре 4F. Таким образом, можно видеть, что смещенный шарнир приводит к межцентровому расстоянию, которое ближе к идеальному значению во всем более широком диапазоне углов, чем центральный (или нейтральный) шарнир.
Возвращаясь снова к фигурам 4А-4F, каждый несущий участок 42 включает в себя шпильку или направляющую 49, выступающую из него. В этом конкретном примере направляющие 49 выступают из каждого фланца 46. Таким образом, каждый несущий участок 42 содержит пару направляющих 49. Они служат в качестве направляющих для электрических соединительных элементов (не показаны), когда они проходят от одного дискретного чувствительного элемента до другого. Направляющие 49 на каждом фланце расположены напротив друг друга в направлении, которое, по существу, параллельно продольной оси несущего элемента 4. Таким образом, элементы электрического соединения, по существу, параллельны продольной оси несущего элемента 4 и поэтому также перпендикулярны к плоскости нулевой чувствительности каждого дискретного элемента датчика.
Каждый из несущих участков 42 включает в себя отверстия 43, образованные в каждом из них. Отверстия 43 объединяются для того, чтобы образовалась непрерывное продольное отверстие, которое проходит по длине несущего элемента 4. Таким образом, удлиненный гибкий несущий элемент 4 можно закрепить на оправке для придания жесткости несущему элементу перед намоткой токопроводящего провода на несущие участки для образования дискретных чувствительных элементов.
Удлиненный несущий элемент, показанный на фигуре 4, можно изготовить из формуемого пластичного материала, такого как, но неограниченного этим, полиамид и полиацеталь.
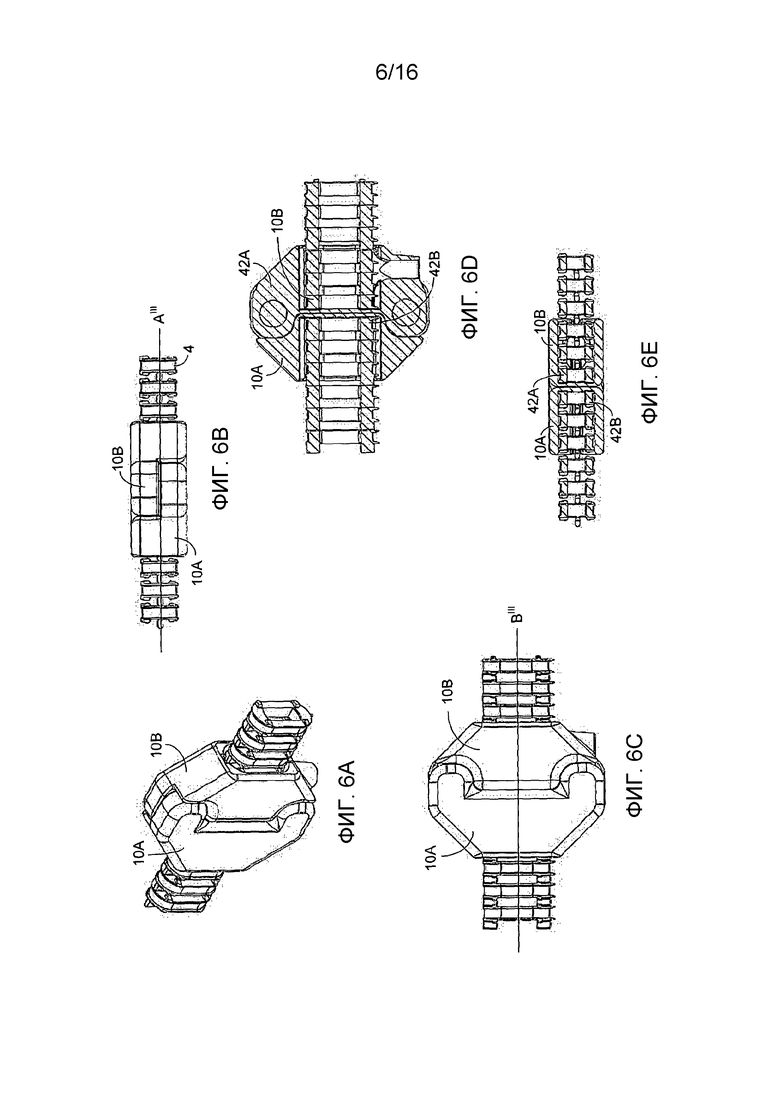
На фигурах 6А-6Е показаны различные виды удлиненного гибкого несущего элемента 4 (фигуры 4А-4F), которые используются совместно с соединительным механизмом 10А, 10В, как описано со ссылкой на фигуру 1. Более конкретно, на фигурах 6А-6С изображены общий вид, виды сверху и сбоку соответственно соединительного механизма 10. На фигурах 6D и 6E изображены виды в разрезе по линиям, обозначенным A′′ и B′′, соответственно.
На фигурах 6D и 6E можно увидеть, что соединительный механизм 10А, 10В выполнен с возможностью поддержания несущих участков 42А, 42В на любом конце удлиненного гибкого несущего элемента 4 в разделенном состоянии, что, по существу, аналогично разделению между соседними несущими участками удлиненного гибкого несущего элемента 4.
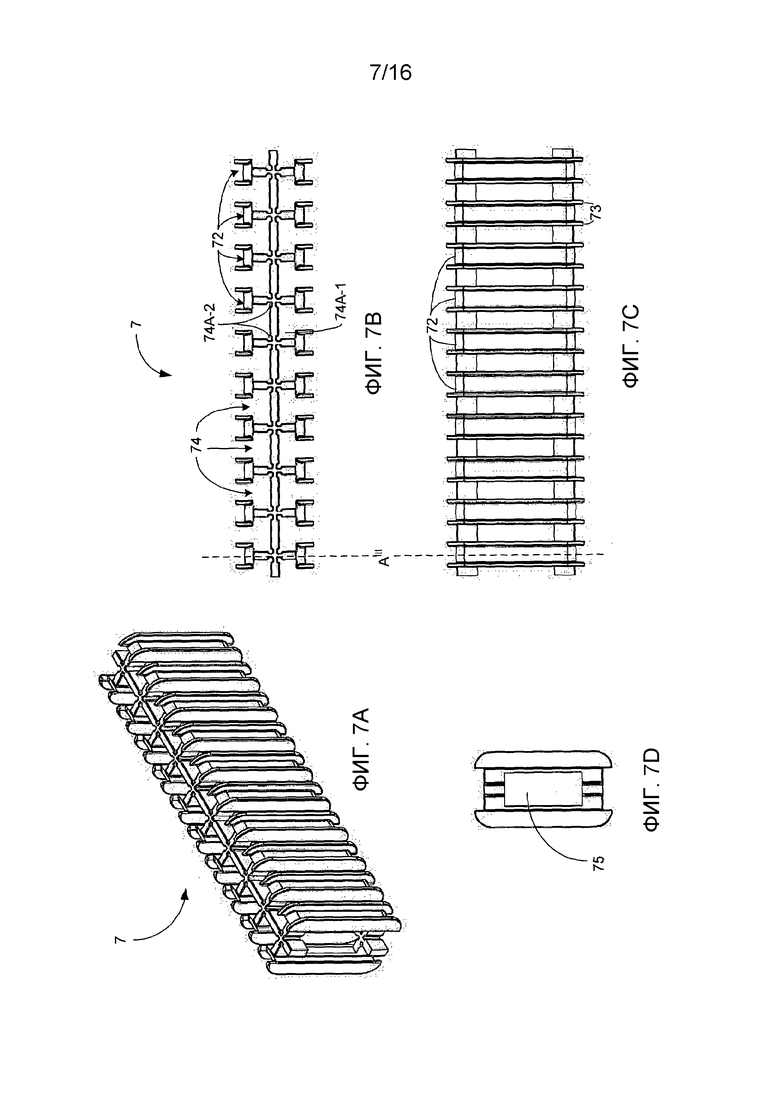
На фигурах 7А-7D показано изменение удлиненного гибкого несущего элемента 4, обсужденного со ссылкой на фигуры 4А-4F. Более конкретно, на фигурах 7А-7С показаны общий вид, виды сверху и сбоку соответственно удлиненного гибкого несущего элемента 7. На фигуре 7D показан вид в разрезе через один из несущих участков 72 (например, вдоль пунктирной линии, отмеченной A′′′).
Как и в случае несущего элемента 4, показанного на фигуре 4, удлиненный гибкий несущий элемент содержит множество несущих участков 72 дискретных элементов датчика, каждый из которых соединен, по меньшей мере, с одним соседним несущим участком 72 с помощью шарнирного участка 74. Как и в случае несущего элемента, показанного на фигуре 4, каждый шарнирный участок 74 содержит первый и второй шарниры 74А, 74В. Первый и второй шарниры 74A, 78B расположены напротив друг друга поперек продольной оси удлиненного несущего элемента 7. Шарниры 74А, 74Б содержат утолщенной участок 74А-1, присоединенный на каждом конце с помощью более тонкого участка 74A-2. Шарниры 74А, 74B соединены с несущими участками 72 с помощью более тонких шарнирных участков 74А-2. Таким образом, точки поворота шарниров находятся на любом конце шарниров 74А, 74В.
В этом примере точки поворота шарнирных участков 74 расположены в пределах толщины несущих участков 72. Предпочтительно, точки поворота представляют собой местоположение, по возможности близкое к центру толщины несущих участков 72. Это позволяет минимизировать изменение межцентрового расстояния соседних несущих участков (и поэтому также межцентровое расстояние дискретных чувствительных элементов, переносимых на них), так как изменяется относительное вращение соседних несущих участков 72. В примере, показанном на фигурах 7А-7D, шарнирные участки 74 можно выровнять с продольной осью удлиненного несущего элемента 7 (то есть нельзя сместить).
Как и в случае несущего элемента 4 (показанного на фигурах 4А-4F), несущие участки 72 несущего элемента 7 (фигуры 7А-7D) содержат катушки, на которых можно намотать проводящий провод для образования дискретных чувствительных элементов. Несущие участки 72 также содержат фланцы 73 для удержания витков провода на несущем участке 72. В дополнение к этому, каждый из несущих участков 72 включает в себя отверстие 75 в их средней области. Это позволяет закрепить удлиненный элемент на оправке. Это облегчает намотку проводящего провода на несущие участки 72 для образования дискретных элементов датчика.
Хотя это и не показано на фигурах 7A-7D, следует иметь в виду, что вариант, показанный на фигуре 7, можно выполнить таким образом, чтобы он включал в себя ряд других признаков, описанных со ссылкой на несущий элемент 4 (фигуры 4А-4F). Например, несущий элемент может включать в себя выступы 48А, 48Б для проникновения в несущий элемент с предпочтительным направлением сгибания. Дополнительно или альтернативно, удлиненный гибкий несущий элемент 7 может включать в себя направляющие, проходящие из него, причем направляющие предназначены для направления соединительных элементов из одного дискретного чувствительного элемента в следующий.
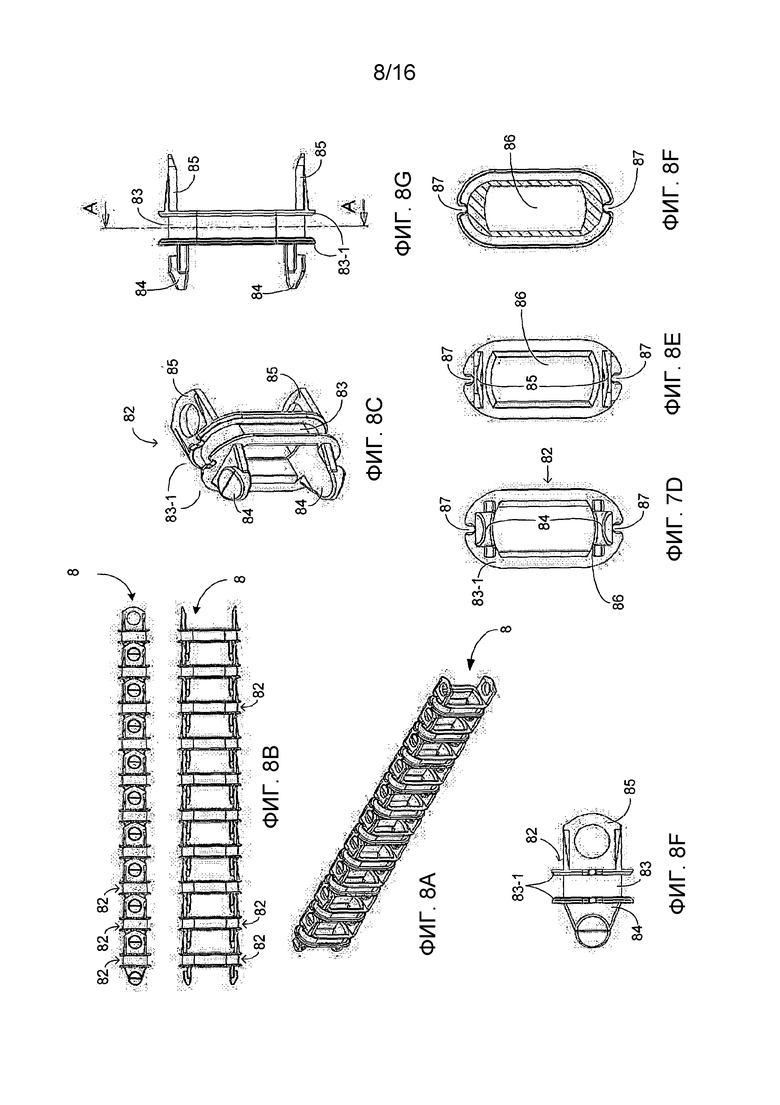
На фигурах 8А-8H показаны аспекты альтернативного удлиненного гибкого несущего элемента 8 для использования в компоновке датчика тока, например, такой, которая описана со ссылкой на фигуру 1. На фигуре 8А изображен общий вид удлиненного гибкого несущего элемента 8. На фигуре 8В показаны виды сверху и сбоку удлиненного гибкого несущего элемента 8. Удлиненный гибкий несущий элемент 8 содержит множество разъемных (или отсоединяемых) несущих участков 82 дискретных чувствительных элементов. На фигурах 8C-8H показаны различные виды одного единственного из разъемных несущих участков 82 дискретных чувствительных элементов.
Каждый разъемный несущий участок 82 содержит катушечную часть 83. Катушечная часть 83 выполнена с возможностью приема множества витков проводящего материала (такого как медной провод), тем самым образуя дискретный чувствительный элемент (на фигурах 7А-7G не показан). Катушечная часть 83 содержит фланец 83-1 на каждом конце. Фланцы 83-1 облегчают удержание дискретных чувствительных элементов на катушечной части 83. Каждый из фланцев 83-1 включает в себя, по меньшей мере, один паз 87 для направления электрического соединительного элемента (не показан) от одного дискретного чувствительного элемента (не показан) до другого.
Поперечное сечение катушечной части 83 имеет неравномерное соотношение размеров (как это видно на фигуре 8H). Катушечная часть 83 включает в себя отверстие 86. Таким образом, когда множество несущих участков 82 присоединены друг к другу для образования удлиненного гибкого элемента 8, образуется сквозное непрерывное продольное отверстие. Таким образом, гибкий удлиненный несущий элемент 8 можно закрепить на оправке для облегчения намотки обмоток катушечной части 83. Как видно на фигурах 8А и 8В, когда множество несущих элементов 82 соединено вместе в выровненном порядке, катушечные части 83 (и поэтому также чувствительные элементы, которые они несут) расположены на одинаковом расстоянии друг от друга.
Разъемный несущий участок 82 содержит пару охватываемых шарнирных частей 84, проходящих от первого конца катушечной части 83. Разъемный несущий участок 82 также содержит пару охватывающих шарнирных частей 85, проходящих от второго конца катушечной части 83. Каждая охватываемая шарнирная часть 84 содержит шарнирный палец, и каждая охватывающая шарнирная часть 85 содержит соответствующее отверстие для приема шарнирного пальца соседнего разъемного несущего участка. Две охватываемые шарнирные части 84 пары расположены напротив друг друга поперек длины отверстия 86. Аналогичным образом, две охватывающие шарнирные части 85 расположены напротив друг друга поперек длины отверстия 86. Каждая из пар охватываемых шарнирных частей 84 расположена напротив другой пары охватывающих шарнирных частей 85 поперек толщины (или глубины) катушечной части 83.
Каждая из пары охватываемых шарнирных частей 84 выполнена с возможностью разъемного соединения с одной из пар охватывающих шарнирных частей 85 соседнего несущего участка 82, тем самым образуя цепочку несущих участков 82. Соседние несущие участки 82 можно отсоединить, побуждая каждую пару охватываемых шарнирных частей 84 отводить от соответствующей охватывающей шарнирной части 85, к которой она присоединена. В конкретном примере, показанном на фигурах 8А-8Н, несущие участки 82 выполнены таким образом, чтобы соседние несущие участки 82 могли отсоединяться за счет прикладывания усилия к паре охватываемых шарнирных частей 84 в направлении друг друга. Охватываемые и охватывающие шарнирные части 84, 85 выполнены таким образом, чтобы в случае, когда они соединены вместе, поворот несущего участка 82 по отношению к другому был разрешен только по одной оси.
По меньшей мере, один паз 87 во фланце 83-1 совмещен с направлением прохождения охватываемых и охватывающих шарнирных частей 84, 85. В примере, показанном на фигурах 7А-7G, фланец содержит два противоположно расположенных паза 87. Это позволяет использовать каждый дискретный несущий участок в любой одной из двух ориентаций. Это облегчает образование удлиненного гибкого несущего элемента 8 из множества отдельных несущих элементов 82.
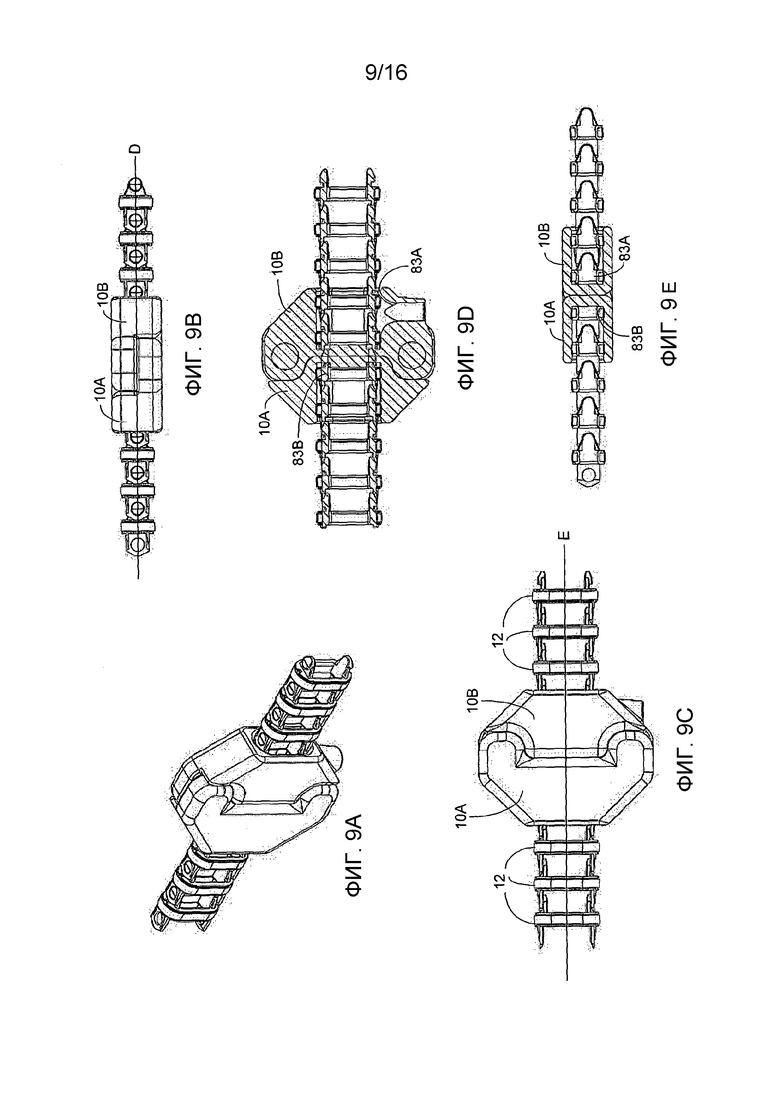
На фигурах 9А-9Е показаны различные виды удлиненного гибкого несущего элемента 8 (фигуры 8А-8H), используемого совместно с соединительным механизмом 10А, 10В, как описано со ссылкой на фигуру 1. Более конкретно, на фигурах 9А-9С изображены общий вид, виды сверху и сбоку соответственно соединительного механизма 10А, 10В. На фигурах 9D и 9E изображены виды в разрезе вдоль линий, обозначенных D и Е соответственно.
На фигурах 9D и 9E можно увидеть, что соединительный механизм 10А, 10В выполнен таким образом, чтобы поддерживать катушечные части 83а, 83b на любом конце удлиненного гибкого несущего элемента 8 в раздельном состоянии, что, по существу, то же самое, как и разделение между соседними катушечными частями 83 удлиненного гибкого несущего элемента 8.
На фигурах 9А-9Е также показаны дискретные чувствительные элементы 12 на месте (in situ) на несущих элементах. Электрические соединительные элементы между дискретными чувствительными элементами 12 не показаны.
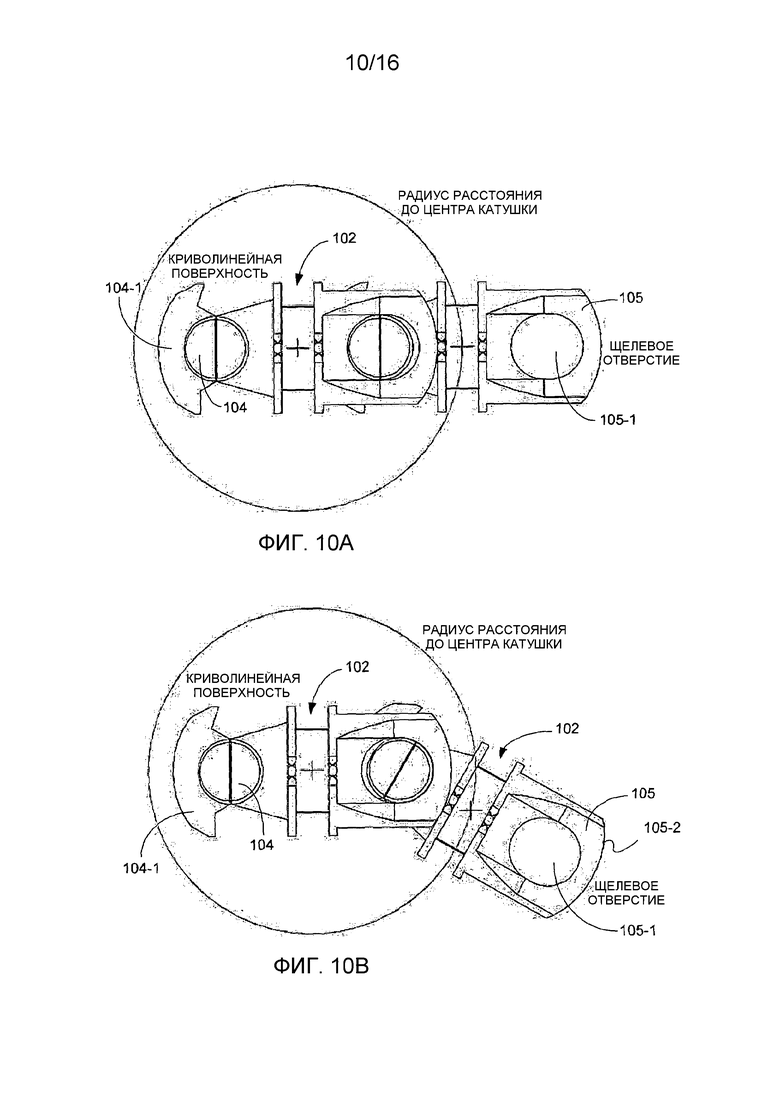
В удлиненном несущем элементе, показанном на фигурах 8А-8Н, межцентровое расстояние дискретных чувствительных элементов изменяется в зависимости от угла изгиба аналогично самой крутой кривой на фигуре 6. На фигурах 10А и 10В показан вариант разъемных несущих участков 82 чувствительных элементов, описанных со ссылкой на фигуру 8. Вариант несущего участка 102, по существу, такой же, как и вариант, описанный со ссылкой на фигуру 8, но он выполнен с возможностью поддержания постоянного межцентрового расстояния чувствительных элементов. В примере, показанном на фигурах 10А и 10В, это достигается путем выполнения пары охватывающих шарнирных частей 105 с удлиненными отверстиями 105-1 вместо круглых отверстий и путем выполнения охватываемых шарнирных частей 104 с криволинейной поверхностью 104-1. Таким образом, когда охватываемая шарнирная часть 104 одного несущего участка 102 поворачивается относительно охватывающей шарнирной части 105 соседнего несущего участка 102, криволинейная поверхность 104-1 побуждает охватываемую шарнирную часть 104 скользить в удлиненном отверстии 105-1 охватывающей шарнирной части 105, тем самым поддерживая межцентровое расстояние для дискретных чувствительных элементов. Это можно увидеть из сравнения, показанного на фигурах 10А и 10В. В примере, показанном на фигурах 10А и 10В, охватывающая шарнирная часть 105 также включает в себя криволинейную поверхность 105-2. Однако в альтернативных примерах одну криволинейную поверхность можно выполнить только на одной из охватываемой и охватывающей шарнирных частей 104, 105. На изображении показаны признаки кулачка на охватываемой и охватывающей половинах, хотя отмечен только охватываемый кулачек (MP). Хотя это не показано на фигурах, следует иметь в виду, что этот пример может включать в себя натяжной элемент (или средство смещения) для принудительного перемещения соседних несущих участков в направлении друг друга. В некоторых примерах это можно выполнить внутри отверстия. В других примерах натяжение можно выполнить с помощью изолирующей оболочки, выполненной на внешней стороне компоновки.
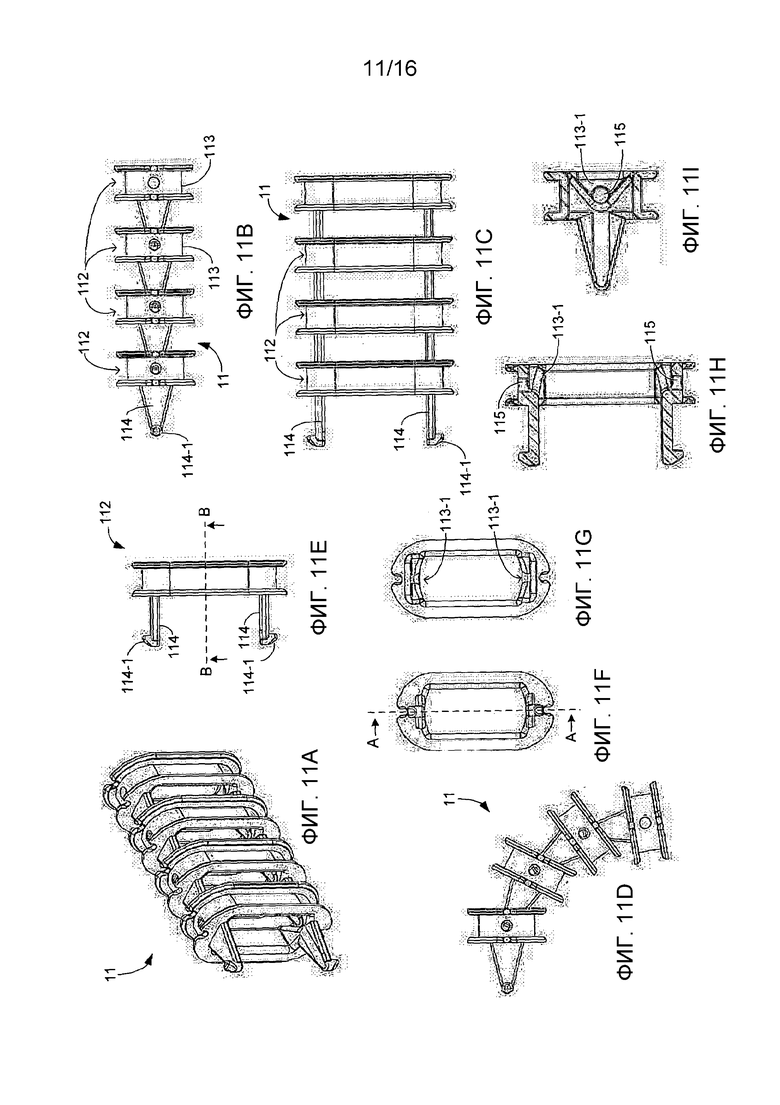
На фигурах 11А-11I показан другой вариант удлиненного гибкого элемента 8, описанного со ссылкой на фигуры 8А-8H. На фигуре 11А изображен общий вид удлиненного гибкого несущего элемента 11. На фигуре 11В изображен вид удлиненного гибкого несущего элемента 8 в случае прямолинейной конфигурации. На фигуре 11C показан вид сбоку удлиненного гибкого несущего элемента в случае прямолинейной конфигурации. На фигуре 11D изображен вид сверху удлиненного гибкого несущего элемента 11 в случае изогнутой конфигурации. Гибкий удлиненный несущий элемент 11 содержит множество разъемных (или отсоединяемых) несущих участков 112 дискретных чувствительных элементов. На фигурах 11E-11I показаны различные виды одного единственного из несущих участков 112 дискретных чувствительных элементов.
Несущие участки 112 дискретных чувствительных элементов, показанные на фигурах 11А-11I, являются, по существу, такими же, как и на фигурах 8А-8H. Основное различие между этими двумя типами несущих участков состоит в том, что на несущих участках 112, показанных на фигурах 11А-11I, охватывающие шарнирные части 115 не проходят из катушечного участка 113. Вместо этого, охватывающие шарнирные части 115 включают в себя отверстия 115, образованные на катушечном участке 113. Охватываемые шарнирные части 114 соседнего несущего участка проходят во внутренней области 113-1 катушечного участка, и выступы 114-1, образованные на охватываемых шарнирных частях 114, соединяются с отверстиями 115 охватывающей шарнирной части 115. Таким образом, ось вращения двух соседних участков 112 находится приблизительно в центре дискретного чувствительного элемента. Это приводит к тому, что межцентровые расстояния дискретных несущих элементов будут поддерживаться одинаковыми, так как несущие участки поворачиваются относительно друг друга.
Как показано на фигурах 11H-11I, внутренняя область 113-1 катушечной части 113 включает в себя углубление, имеющее определенную форму, которое выполнено таким образом, чтобы охватываемая шарнирная часть 114 соседнего несущего участка 112 могла поворачиваться в нем.
Фигуры 12А и 12В иллюстрируют аспекты варианта удлиненного гибкого несущего элемента, описанного со ссылкой на фигуры 4А-4F. Основное различие между несущим элементом 4, показанным на фигурах 4А-4F, и несущим элементом 13, показанным на фигурах 12А и 12В, состоит в том, что поперечное сечение несущей части 132 имеет равное соотношение размеров. В этом конкретном примере поперечное сечение имеет круглую форму. Многие из других особенностей несущего элемента 4, показанного на фигурах 4А-4F, могут также присутствовать в несущем элементе 13, показанном на фигурах 12A и 12B. Такие особенности включают в себя шарнирные участки 134 (которые могут или не могут смещаться), фланцы 136, выполненные на противоположных концах несущей части 132 (которую можно называть как катушечную часть), направляющие (или штифты) 138 для направления соединительных элементов от одного дискретного чувствительного элемента до следующего, а также отверстия 139, образованные через всю толщину несущей части. Хотя это и не показано на фигурах 12А и 12В, следует иметь в виду, что удлиненный несущий элемент 13 может быть также снабжен выступами для обеспечения асимметричной гибкости несущего элемента 13.
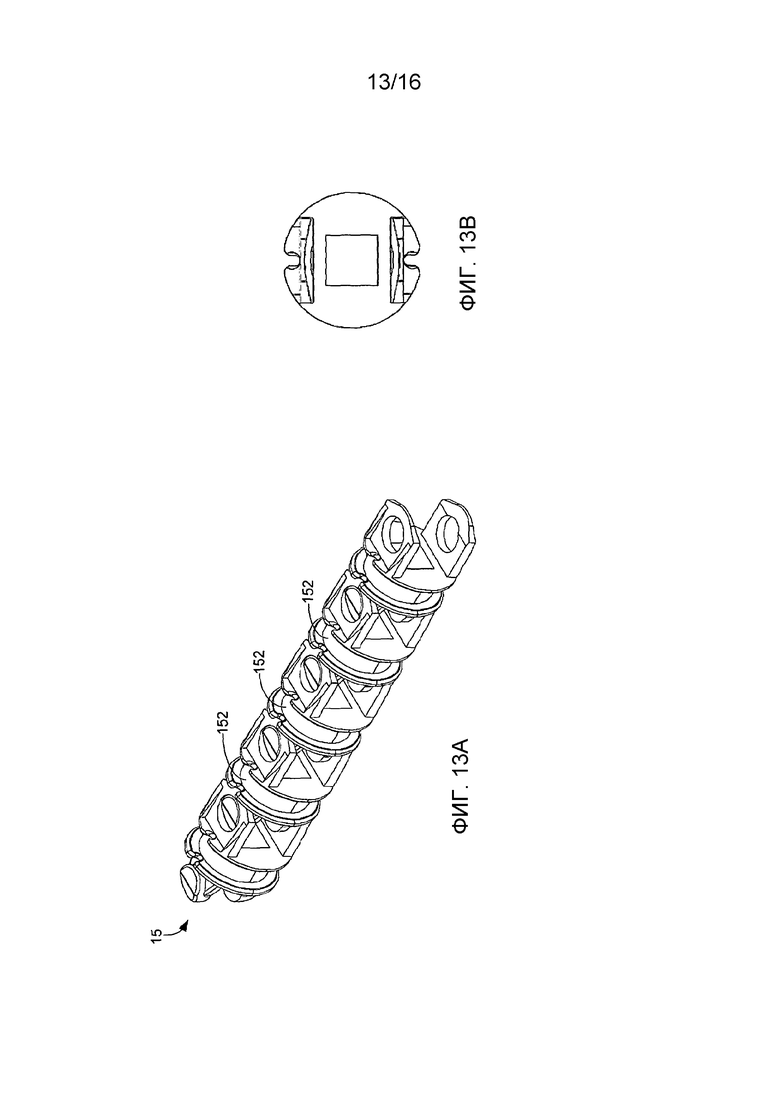
Фигуры 13А и 13В иллюстрируют аспекты варианта удлиненного гибкого несущего элемента, описанного со ссылкой на фигуры 8А-8H. Основное различие между несущим элементом 8, показанным на фигурах 8А-8H, и несущим элементом 15, показанным на фигурах 13А и 13B, состоит в том, что катушечная часть каждого разъемного (или отсоединяемого) несущего участка дискретных чувствительных элементов имеет поперечное сечение, имеющее равное соотношение размеров. В этом примере поперечное сечение имеет круглую форму. Другие особенности несущего элемента 15 могут быть такими, как описано со ссылкой на фигуры 8А-8H.
Хотя это и не иллюстрировано на фигурах, следует понимать, что катушечные части любого из несущих элементов, показанных на фигурах 7, 10 и 11, могут иметь поперечное сечение, имеющее равное соотношение размеров. Аналогичным образом, чувствительный элемент, показанный на любых других фигурах, описанных здесь, можно выполнить с поперечным сечением, имеющим равное соотношение размеров.
Фигуры 14А-14D иллюстрируют аспекты варианта компоновки гибкого датчика тока, изображенного на фигурах 1A-1E. Компоновка датчика, показанная на фигурах 14А-14D, является, по существу, такой же, как описанная со ссылкой на фигуру 1. Однако в компоновке, показанной на фигурах 14А-14D, гибкий удлиненный несущий элемент содержит удлиненную гибкую печатную плату. Дискретные чувствительные элементы механически и электрически присоединены к гибкой печатной плате 14. Эта печатная плата 14 служит для последовательно электрического соединения дискретных чувствительных элементов. Это позволяет избежать необходимости в отдельном несущем элементе 14 и соединительных элементах. На фигурах 14A-14D дискретные чувствительные элементы 12 выполнены в виде катушек с намотанной проволокой. Однако вместо этого, они могут представлять собой, например, токопроводящие дорожки, нанесенные на плоские печатные платы (например, как на фигурах 2А-2D).
Фигуры 15A-15D иллюстрируют аспекты альтернативного удлиненного гибкого несущего элемента 19 для переноса дискретных чувствительных элементов. Удлиненный гибкий несущий элемент 19 содержит множество дискретных несущих элементов 192 для переноса чувствительного элемента (на фигурах 15A-15D не показан). Каждый из дискретных несущих элементов 192 содержит катушечную часть, вокруг которой может быть намотан дискретный чувствительный элемент. В этом примере несущие элементы 192 содержат фланцы, расположенные на обоих его концах, для удержания чувствительного элемента на дискретном несущем элементе 192. Дискретные несущие элементы 192 распределены вдоль удлиненного гибкого несущего элемента 14. В этом примере гибкий удлиненный несущий элемент 14 содержит гибкие печатные платы. Каждый из дискретных несущих элементов содержит многочисленные (в данном примере два) электрически проводящие выступы 196, проходящие из дискретного несущего элемента 192. Выступы 196 механически и электрически соединены с удлиненной гибкой печатной платой 14. Концы катушки, которая образует каждый дискретный чувствительный элемент, намотаны вокруг различных проводящих выступов, тем самым электрически соединяя дискретные чувствительные элементы с гибкой печатной платой, а также последовательно друг с другом. Каждый дискретный несущий элемент имеет сквозное отверстие 198, образованное в нем. Это позволяет закрепить дискретные несущие элементы 192 на оправке, облегчая тем самым намотку дискретных чувствительных элементов на дискретные несущие элементы 192.
В примере, показанном на фигурах 15A-15D, катушечные части дискретных несущих элементов имеют поперечное сечение, имеющее равное соотношение размеров (в частности, круглое). Однако вместо этого их можно выполнить с неравным соотношением размеров.
Фигуры 16A-16G иллюстрируют аспекты другого удлиненного гибкого несущего элемента 19 для переноса дискретных чувствительных элементов. На фигурах 16A и 16В показаны общие виды несущего элемента с криволинейной и прямолинейной конфигурациями соответственно. На фигурах 16C и 16D показан вид сверху несущего элемента 20 с криволинейной и прямолинейной конфигурациями соответственно. На фигурах 16E и 16F показаны виды в разрезе через несущий элемент 20 с его криволинейной и прямолинейной конфигурациями соответственно. На фигуре 16G показано поперечное сечение несущего элемента 20, например, вдоль пунктирной линии, обозначенной G на фигуре 16D.
Несущий элемент 20 содержит множество несущих участков 202. В этом конкретном примере несущие участки выполнены в виде катушек для переноса катушек с намотанной проволокой, которые образуют дискретные чувствительные элементы. Несущие участки 202 имеют поперечное сечение, имеющее равное соотношение размеров. Однако следует понимать, что несущие участки 202 могут вместо этого иметь поперечное сечение с неравным соотношением размеров.
Несущий элемент 20 также содержит множество связывающих участков 204, которые связывают несущие участки 204 друг с другом. Связывающие участки 204 принимают в отверстиях, образованных в несущих участках 202. Связывающие участки 204 связаны с соседними связывающими участками в пределах отверстий, образованных на несущих участках 204. Эти связывающие участки 204 имеют зубчатые торцевые поверхности. Зубчатые торцевые поверхности являются искривленными. Зубчатые торцевые поверхности связывающих участков 204 входят в зацепление вместе с зубчатыми торцевыми соседними участками 204, тем самым позволяя связывающим участкам 204 поворачиваться относительно друг друга.
Связывающие участки присоединены к несущим участкам 202 через шарнирные детали 206, проходящие с противоположных сторон торцов связывающих участков 204. Шарнирные детали 206 принимаются с возможностью вращения в отверстиях, образованных во внутренней части несущих участков 202. Удлиненные зубья зубчатых торцевых поверхностей продолжаются в том же направлении, как и шарнирные детали 206.
Несущий элемент 20 выполнен таким образом, чтобы управлять углом дискретных чувствительных элементов, выполненных на несущих участках 202 таким образом, чтобы плоскости нулевой чувствительности в однородных полях элементов датчика были всегда направлены в центр контура, образованного несущим элементом 20. Это позволяет обеспечить точную компоновку датчика.
Хотя это и не показано на какой-либо из фигур, компоновку гибкого датчика тока можно выполнить в изолирующей оболочке. Изолирующая оболочка может представлять собой пластмассовый или резиновый материал. Изолирующая оболочка может включать в себя электростатический экранирующий слой. Электростатический экранирующий слой может содержать, например, полупроводниковый слой или металлический слой, такой как медная оплетка. Альтернативно или дополнительно, выходной кабель 16 может быть коаксиальным так, чтобы он включал в себя металлический экранирующий слой. Экранирующий слой выходного кабеля может быть электрически соединен с дискретным чувствительным элементом 12, который находится посередине в электрической цепочке чувствительных элементов 12.
В приведенных выше примерах соединительный механизм 10А, 10В выполнен таким образом, чтобы интервал для всех дискретных чувствительных элементов 12 по всему контуру был одинаковым. Однако в некоторых примерах это может не иметь место и расстояние между конечным чувствительными элементами в цепочке может быть больше, чем расстояние между другими чувствительными элементами 12. В таких примерах число витков или площадь чувствительных элементов в любом конце цепочки можно увеличить для компенсации увеличенного расстояния между ними. В таких примерах разделение между каждым конечным чувствительным элементом и соседним элементом можно увеличить на половину разности между расстоянием между конечными чувствительными элементами и расстоянием между другими элементами в цепочке. Альтернативно, последние два чувствительных элемента на каждом конце цепочки могут перемещаться друг к другу, сохраняя при этом равное расстояние между чувствительными элементами.
Следует понимать, что вышеприведенные варианты не следует рассматривать как ограничивающие. Другие изменения и модификации будут очевидны специалистам в данной области техники после прочтения настоящей заявки. Более того, раскрытие настоящей заявки следует понимать как включающее в себя любые новые признаки или любую новую комбинацию признаков, описанных здесь явным или неявным образом, или любое их обобщение и во время рассмотрения дела по настоящей заявке или любого приложения, полученного из нее, новые пункты формулы изобретения можно сформулировать для охвата любых таких признаков и/или комбинации таких признаков. В качестве примера такой комбинации, в некоторых вариантах осуществления чувствительные элементы на печатной плате, показанные на фигурах 2 и 3, можно использовать с удлиненными гибкими несущими элементами типа, описанного со ссылкой на фигуры 4-11.

Группа изобретений относится к измерительной технике, в частности к датчикам тока, содержащим множество токочувствительных элементов. Компоновка гибкого датчика тока содержит множество дискретных токочувствительных элементов, распределенных вдоль удлиненного гибкого несущего элемента. Удлиненный гибкий элемент для компоновки датчика тока содержит множество несущих участков, связанных друг с другом с помощью шарнирных участков, причем каждый несущий участок выполнен с возможностью приема дискретного токочувствительного элемента. Связывающие участки выполнены с возможностью вращения соседних катушек вокруг оси вращения. При этом связывающие участки совмещены с продольной осью удлиненного гибкого несущего элемента или смещены относительно продольной оси таким образом, чтобы соседние катушки вращались вокруг связывающих участков. Межцентровое расстояние соседних катушек в среднем поддерживается ближе к постоянному значению, чем в случае, когда связывающие участки совмещены с продольной осью. Способ изготовления компоновки гибкого датчика тока содержит этапы, на которых выполняют удлиненный гибкий несущий элемент и распределяют множество дискретных чувствительных элементов вдоль удлиненного гибкого несущего элемента. Технический результат заключается в повышении точности измерений. 3 н. и 17 з.п. ф-лы, 16 ил.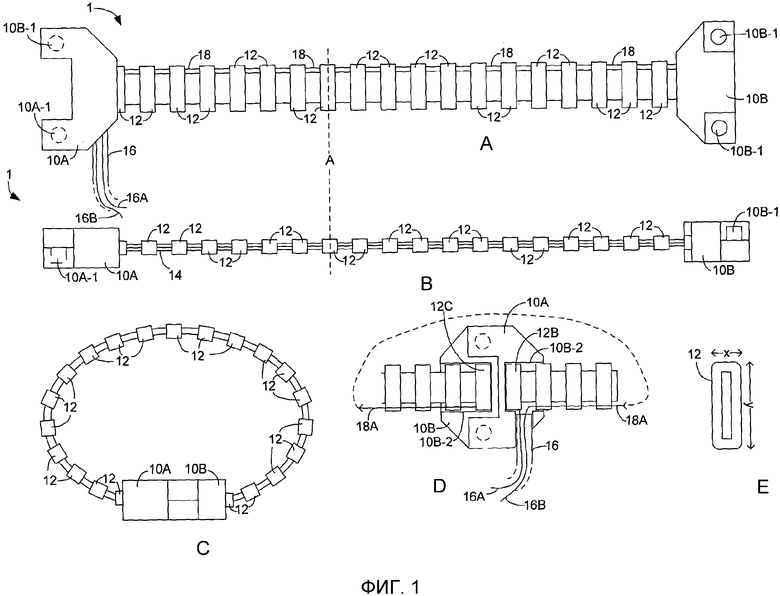
1. Компоновка гибкого датчика тока, содержащая множество дискретных токочувствительных элементов, распределенных вдоль удлиненного гибкого несущего элемента, причем удлиненный гибкий несущий элемент содержит множество катушек, связанных друг с другом связывающими участками, при этом каждая из катушек выполнена с возможностью приема, по меньшей мере, одного токочувствительного элемента, причем связывающие участки выполнены с возможностью вращения соседних катушек вокруг оси вращения, причем связывающие участки совмещены с продольной осью удлиненного гибкого несущего элемента или смещены относительно продольной оси таким образом, чтобы соседние катушки вращались вокруг связывающих участков, причем межцентровое расстояние соседних катушек в среднем поддерживается ближе к постоянному значению, чем в случае, когда связывающие участки совмещены с продольной осью.
2. Компоновка гибкого датчика тока по п. 1, в которой поперечное сечение каждого чувствительного элемента, через который проходит гибкий несущий элемент, больше по первому размеру, чем по второму размеру.
3. Компоновка гибкого датчика тока по п. 1, в которой компоновка гибкого датчика тока выполнена в виде открываемого контура.
4. Компоновка гибкого датчика тока по п. 1, в которой удлиненный гибкий несущий элемент выполнен таким образом, чтобы он имел предпочтительную ось сгибания.
5. Компоновка гибкого датчика тока по п. 4, в которой удлиненный гибкий несущий элемент выполнен таким образом, чтобы он имел одну ось сгибания.
6. Компоновка гибкого датчика тока по п. 4, в которой гибкость удлиненного гибкого несущего элемента вокруг предпочтительной оси сгибания является асимметричной.
7. Компоновка гибкого датчика тока по п. 3, в которой, когда компоновка выполнена в виде контура, противоположные концы гибкого несущего элемента лежат в одной и той же плоскости, как и остальная часть несущего элемента.
8. Компоновка гибкого датчика тока по п. 1, в которой дискретные чувствительные элементы расположены, по существу, эквидистантно вдоль удлиненного гибкого несущего элемента.
9. Компоновка гибкого датчика тока по п. 1, содержащая:
первый соединительный элемент на первом конце удлиненного гибкого несущего элемента;
второй соединительный элемент на втором конце удлиненного гибкого несущего элемента, причем первый и второй соединительные элементы выполнены с возможностью разъемного зацепления друг с другом для образования компоновки датчика в замкнутом контуре, причем дискретные чувствительные элементы расположены эквидистантно вдоль замкнутого контура.
10. Компоновка гибкого датчика тока по п. 9, в которой первый и второй соединительный элементы выполнены таким образом, чтобы в случае, когда они соединены друг с другом, тем самым конфигурируя компоновку в виде замкнутого контура, расстояние между чувствительными элементами в каждом конце несущего элемента было, по существу, таким же, как и расстояние между каждым из других чувствительных элементов на несущем элементе и его ближайшими соседними элементами.
11. Компоновка гибкого датчика тока по п. 1, в которой удлиненный гибкий несущий элемент проходит через центральную область каждого из токочувствительных элементов.
12. Компоновка гибкого датчика тока по п. 1, в которой каждый токочувствительный элемент имеет плоскость нулевой чувствительности для однородных магнитных полей, причем компоновка гибкого датчика тока выполнена таким образом, чтобы плоскость нулевой чувствительности каждого чувствительного элемента была, по существу, локально перпендикулярна к продольной оси участка удлиненного гибкого несущего элемента, на котором он переносится.
13. Компоновка гибкого датчика тока по п. 1, в которой дискретные чувствительные элементы содержат множество витков медной проволоки, намотанной вокруг одной из катушек.
14. Компоновка гибкого датчика тока по п. 1, в которой множество связанных несущих участков связаны друг с другом с возможностью разъединения с помощью связывающих участков.
15. Компоновка гибкого датчика тока по п. 1, в которой связывающие участки постоянно связаны с катушками таким образом, чтобы соседние катушки нельзя было отсоединить друг от друга.
16. Компоновка гибкого датчика тока по п. 1, 14 или 15, в которой связывающие участки выполнены таким образом, чтобы минимизировать изменения при разделении центров соседних катушек, когда катушки вращаются вокруг связывающих участков.
17. Компоновка гибкого датчика тока по п. 1, 14 или 15, в которой связывающие участки смещены относительно продольной оси по направлению к предпочтительному направлению сгибания гибкого удлиненного несущего элемента.
18. Компоновка гибкого датчика тока по любому предыдущему из пп. 1-12, причем дискретные токочувствительные элементы содержат катушки, нанесенные на печатной плате и расположенные по центру на удлиненном гибком несущем элементе.
19. Удлиненный гибкий элемент для компоновки датчика тока, причем удлиненный гибкий элемент содержит множество катушек, связанных друг с другом с помощью связывающих участков, при этом каждая катушка выполнена с возможностью приема дискретного токочувствительного элемента, причем связывающие участки позволяют вращаться соседним катушкам относительно оси вращения, причем связывающие участки совмещены с продольной осью удлиненного гибкого несущего элемента или смещены относительно продольной оси таким образом, чтобы, когда соседние катушки вращаются относительно связывающих участков, межцентровое расстояние соседних катушек поддерживалось в среднем ближе к постоянному значению, чем в случае, когда связывающие участки совмещены с продольной осью.
20. Способ изготовления компоновки гибкого датчика тока, причем способ содержит этапы, на которых:
выполняют удлиненный гибкий несущий элемент, причем удлиненный гибкий несущий элемент содержит множество катушек, связанных друг с другом с помощью связывающих участков, при этом каждая из катушек выполнена с возможностью приема, по меньшей мере, одного токочувствительного элемента, причем связующие участки позволяют вращаться соседним катушкам относительно оси вращения, причем связующие участки совмещены с продольной осью удлиненного гибкого несущего элемента или смещены относительно продольной оси таким образом, чтобы, когда соседние катушки вращаются вокруг связывающих участков, межцентровое расстояние соседних катушек поддерживалось в среднем ближе к постоянному значению, чем в случае, когда связывающие участки совмещены с продольной осью; и
распределяют множество дискретных чувствительных элементов вдоль удлиненного гибкого несущего элемента.
| US 20110148561 A1 23.06.2011 | |||
| US 7230413 B2 12.06.2007 | |||
| US 7847543 B2 07.12.2010 | |||
| US 7078888 B2 18.07.2006 | |||
| WO 2010117521 A1 14.10.2010. |

