Область техники, к которой относится изобретение
Настоящее изобретение, в целом, относится к автономному устройству для обработки пола и, в частности, но не исключительно, к автономному пылесосу.
Уровень техники
Мобильные роботы становятся обычным явлением, и их используют в таких различных областях, как исследование космоса, стрижка газонов и чистка пола. В последнее десятилетие можно было наблюдать особенно быстрое развитие в области устройств для чистки пола, особенно в области пылесосов, основная задача которых заключается в том, чтобы автономно и ненавязчиво перемещаться по дому пользователя и, в то же время, чистить пол.
При выполнении этой задачи робот-пылесос должен перемещаться по области, которую требуется почистить, и в то же время предотвращать столкновения с препятствиями. При обходе комнаты требование, предъявляемое к роботу-пылесосу, заключается в том, чтобы производить чистку настолько приближаясь к краям комнаты настолько близко, насколько это возможно. Один из походов к этому показан в US 6883201, где робот-пылесос с круглым корпусом оборудован вращающимися боковыми щетками на каждом из его боков спереди, чтобы сметать мусор на траекторию горизонтально установленной щетки, расположенной на нижней стороне устройства между его колесами. Такая система с расположенными на противоположных сторонах щетками может привести к тому, что мусор, может быть вытолкнут от передней части устройства, что приводит к снижению эффективности этого подхода к чистке краев комнаты.
Раскрытие изобретения
На этом фоне было сделано настоящее изобретение. С этой целью, в изобретении предложено автономное устройство для обработки пола, содержащее основной корпус, ограничивающий внешний профиль в плане, и имеющее приводное устройство, установленное внутри внешнего профиля в плане основного корпуса, и сконфигурированное так, чтобы двигать устройство в направлении перемещения по поверхности, которую необходимо чистить, блок обработки поверхности, связанный с основным корпусом и расположенный перпендикулярно направлению перемещения, причем блок для чистки поверхности, в целом, имеет вытянутую форму и боковые края, проходящие параллельно направлению перемещения и по касательной к соответствующим круглым участкам внешнего профиля в плане основного корпуса.
В принципе, изобретение распространяется на любое автономное устройство, направленное на отработку поверхности пола, которое включает в себя блок для обработки поверхности, проходящий перпендикулярно направлению перемещения устройства, например, на подметальную машину, полировальную машину или моечную машину, или даже на роботизированную газонокосилку. Тем не менее, изобретение особенно практично для роботов-пылесосов, и, поэтому, далее изобретение будет описано в этом контексте. Таким образом, в одном варианте осуществления устройство представляет собой автономный пылесос и, поэтому, дополнительно содержит источник энергии, функционально связанный с генератором всасывания, способного затягивать воздух из входа для грязного воздуха чистящей головки в съемное устройство отделения грязи и пыли.
Так как блок обработки поверхности или "головка" проходит поперек через основной корпус устройства, так что боковые края или грани проходят параллельно направлению перемещения и по касательной к соответствующим круглым участкам внешнего профиля в плане основного корпуса, то конфигурация устройства позволяет производить чистку вплоть до краев комнаты. Более того, так как профиль в плане устройства, по меньшей мере, частично круглый, то он обладает выгодной формой для осуществления поворота на месте, так что оно имеет больше возможностей для маневрирования из замкнутых пространств и углов. Предпочтительно, чтобы основной корпус был по существу круглым в плане.
В примере осуществления чистящая головка может проходить перпендикулярно через задний участок основного корпуса и позади опорной колесной конструкции. Поэтому, блок обработки способен осуществлять чистку вдоль траектории, покрываемой опорными колесами, и, таким образом, может подбирать частицы или грязь, которая может быть нанесена на поверхность пола колесами.
В одном варианте осуществления основной корпус включает в себя шасси, а на шасси выполнена чистящая головка, при этом она может быть выполнена как единое целое с шасси. Таким образом, шасси может ограничивать вытянутую опорную пластину, проходящую спереди от чистящей головки вдоль продольной оси и в направлении перемещения.
Шасси также может включать в себя первую и вторую выемки, расположенные на его противоположных сторонах, в которые могут входить соответствующие тяговые единицы приводного устройства. Поэтому, тяговые единицы можно установить на шасси внутри внешнего периметра устройства и перед чистящей головкой. Целесообразно, чтобы блок обработки проходил за пределами ширины тяговых единиц и, таким образом, мог чистить поверхность пола от пыли и частиц, которые могут оставить за собой тяговые единицы.
Чтобы вмещать в себя съемное устройство отделения грязи, основной корпус может включать в себя передний участок, ограничивающий открытую платформу, куда помещают съемное устройство отделения грязи. Предпочтительно, чтобы устройство отделения грязи было по существу цилиндрическим, и чтобы его помещали на платформу вертикально, так чтобы его продольная ось проходила по существу вертикально, то есть по нормали к продольной и поперечной осям основного корпуса.
Хотя устройство отделения грязи может принимать другие формы, в примере осуществления оно представляет собой циклонное отделительное устройство, которое обеспечивает способность пылесоса проводить чистку особенно эффективно.
устройство отделения грязи может быть сконфигурировано так, чтобы оно образовывало часть внешнего профиля в плане устройства, поэтому, его форма дополняет по существу круглый профиль устройства. Более того, участок устройства отделения грязи может выступать за пределы переднего участка основного корпуса в направлении перемещения и, таким образом, устройство отделения грязи обеспечивает устройство упругим защитным упором на случай столкновения.
Структура основного корпуса также может включать в себя участок корпуса, который установлен на шасси и подвижен относительно него. Это обеспечивает устройство способностью определять столкновения, так как корпус будет перемещаться относительно шасси, причем такое перемещение можно определить посредством подходящего сенсорного устройства. То есть, на корпусе выполнен источник энергии, генератор всасывания, платформа, принимающая устройство отделения грязи, причем все эти элементы подвижны относительно шасси.
Краткое описание чертежей
Чтобы изобретение было более понятным, теперь, только для примера, сделаем ссылку на сопровождающие чертежи, на которых:
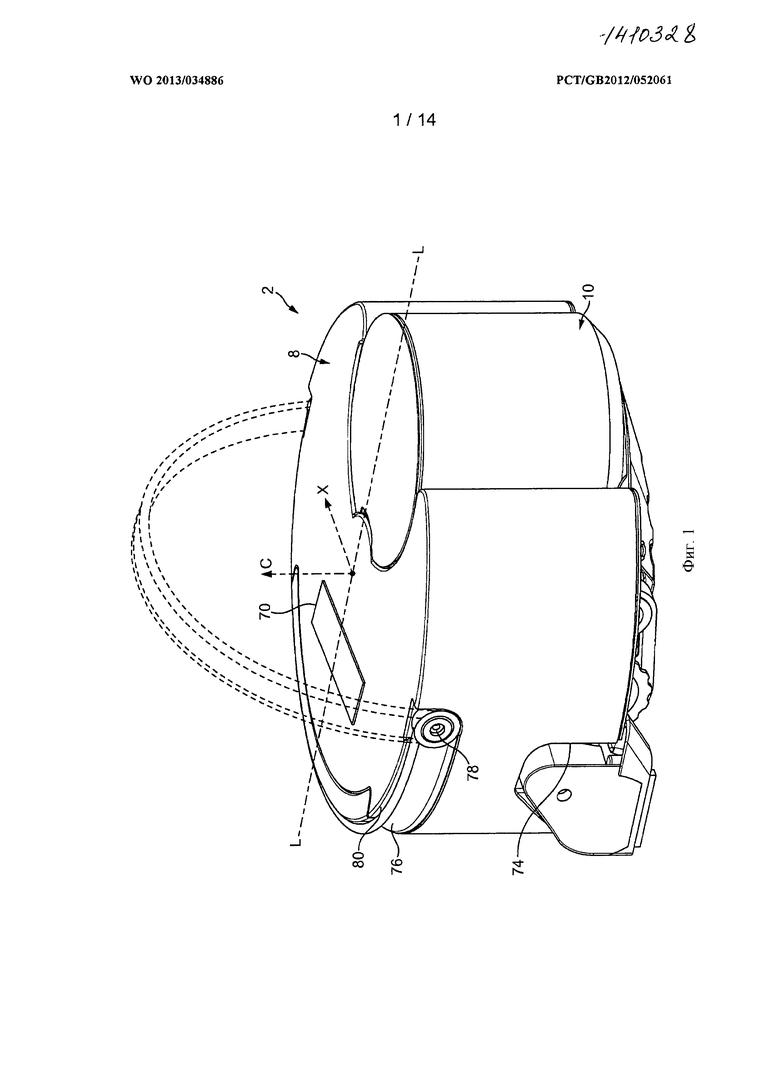
на фиг. 1 показан вид в перспективе спереди мобильного робота в соответствии с вариантом осуществления изобретения;
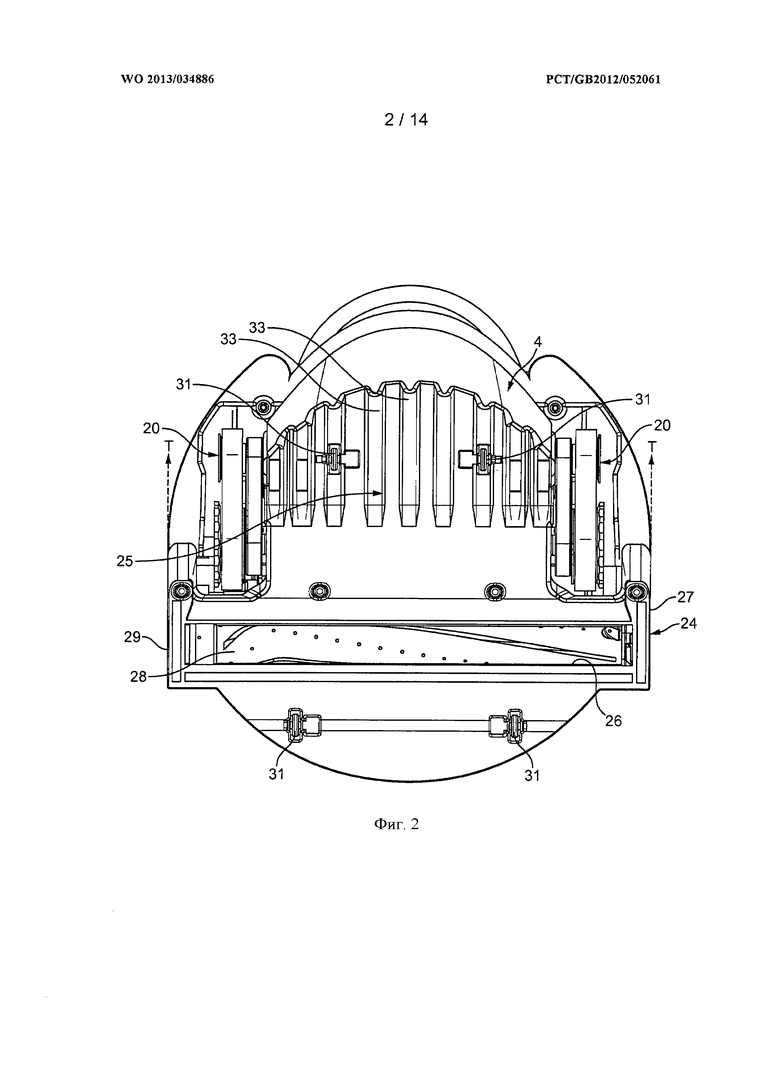
на фиг. 2 приведен вид снизу мобильного робота, показанного на фиг. 1;
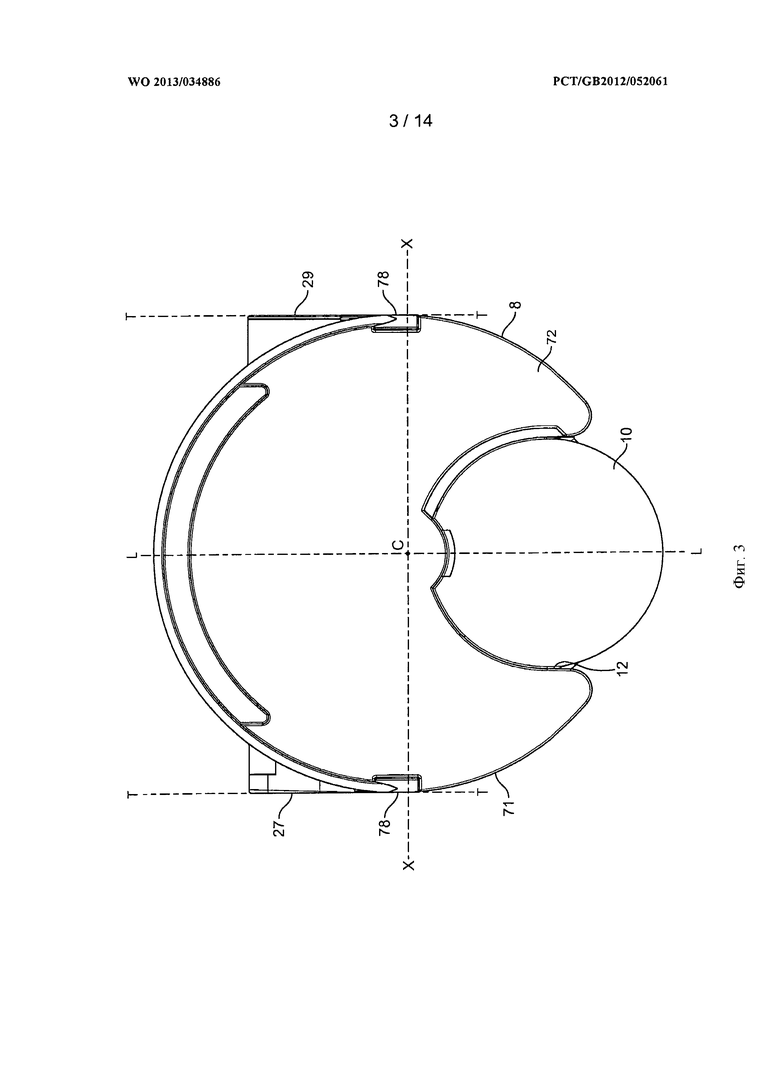
на фиг. 3 приведен вид в плане сверху мобильного робота, показанного на фиг. 1;
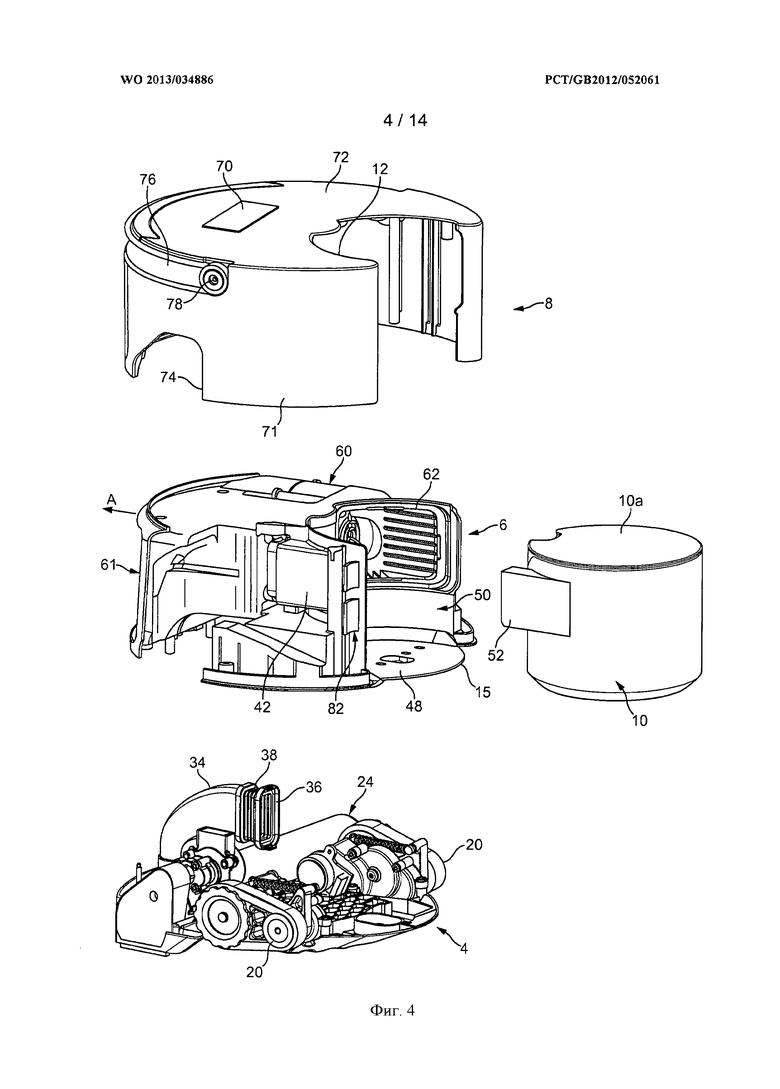
на фиг. 4 показан вид в перспективе по частям мобильного робота в соответствии с изобретением, показывающий его основные узлы;
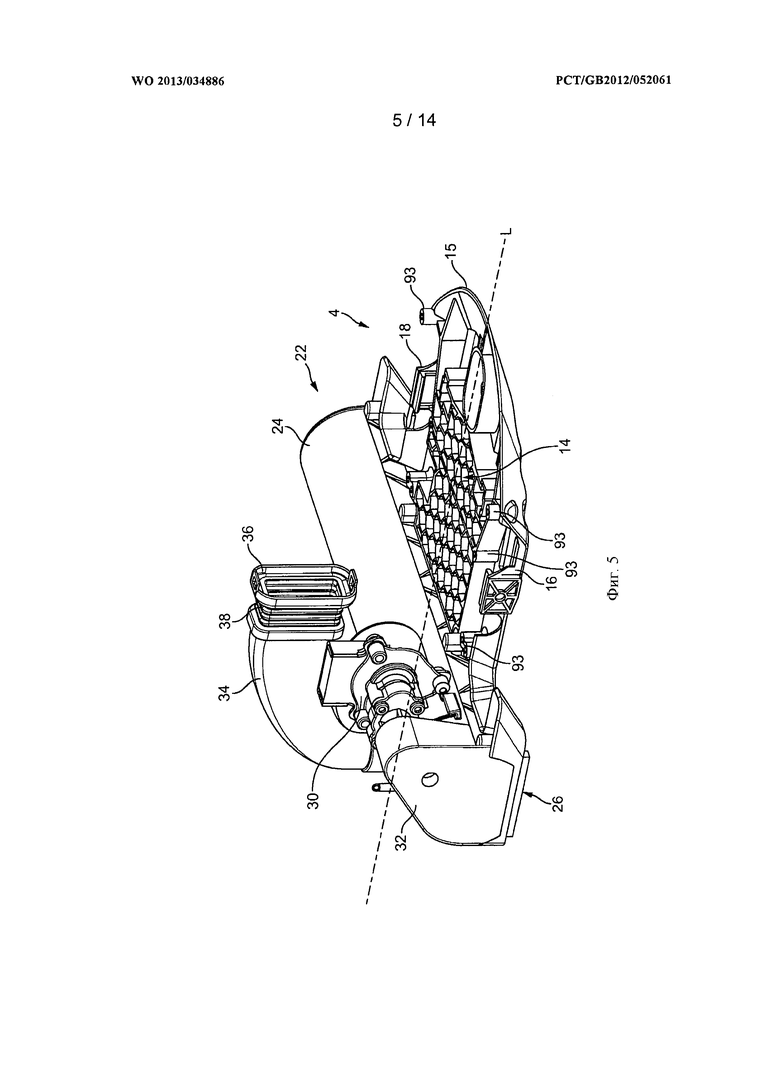
на фиг. 5 приведен вид в перспективе спереди шасси мобильного робота;
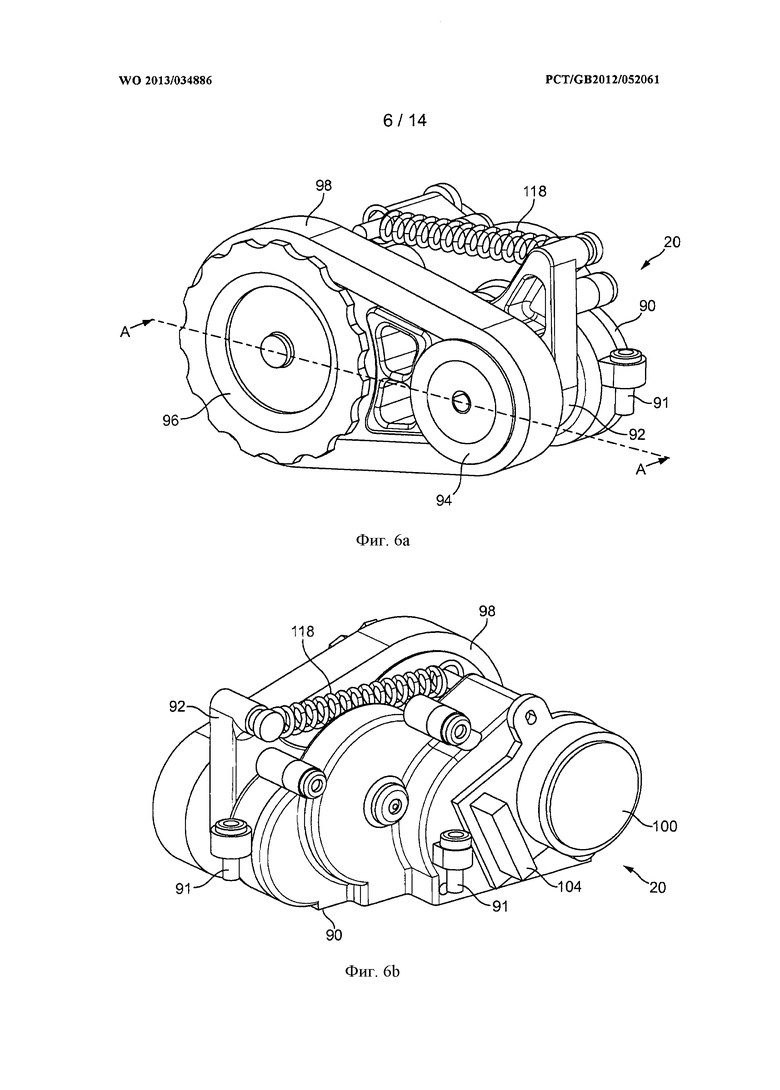
на фиг. 6a и 6b приведены виды в перспективе спереди с каждой стороны тяговой единицы мобильного робота;
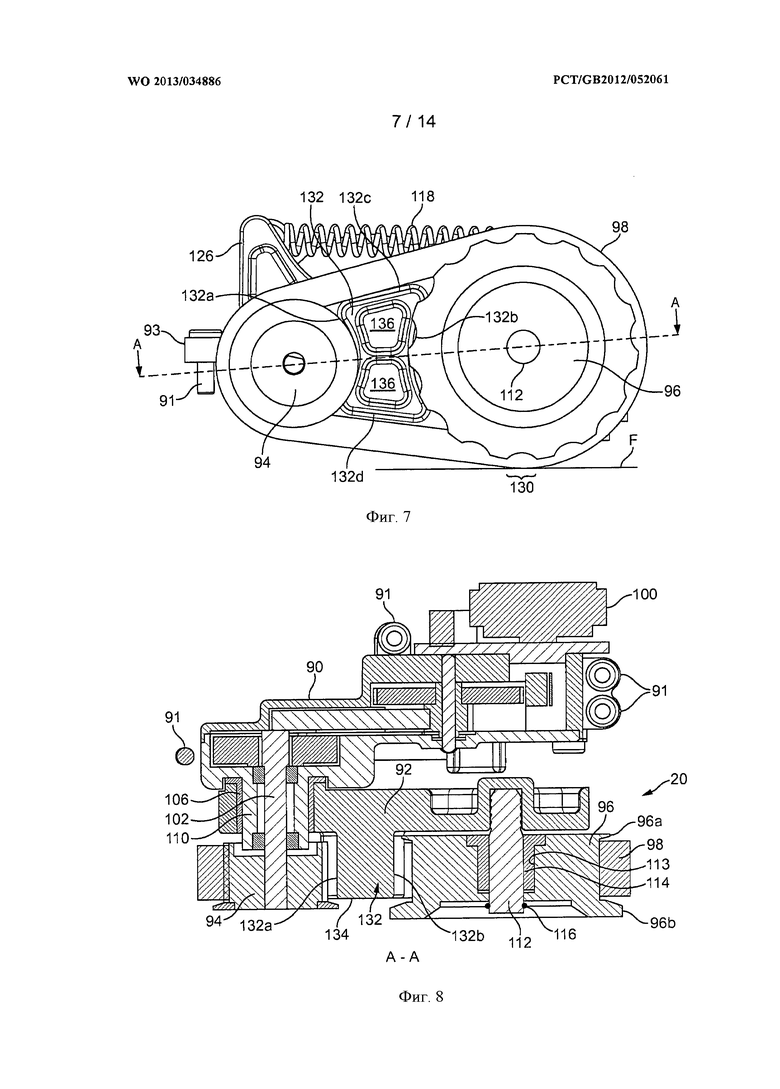
на фиг. 7 приведен вид сбоку тяговой единицы, показанной на фиг. 6a и 6b, и показана ее ориентация относительно поверхности, по которой она катится;
на фиг. 8 приведен вид в разрезе тяговой единицы, показанной на фиг. 7, вдоль прямой A-A;
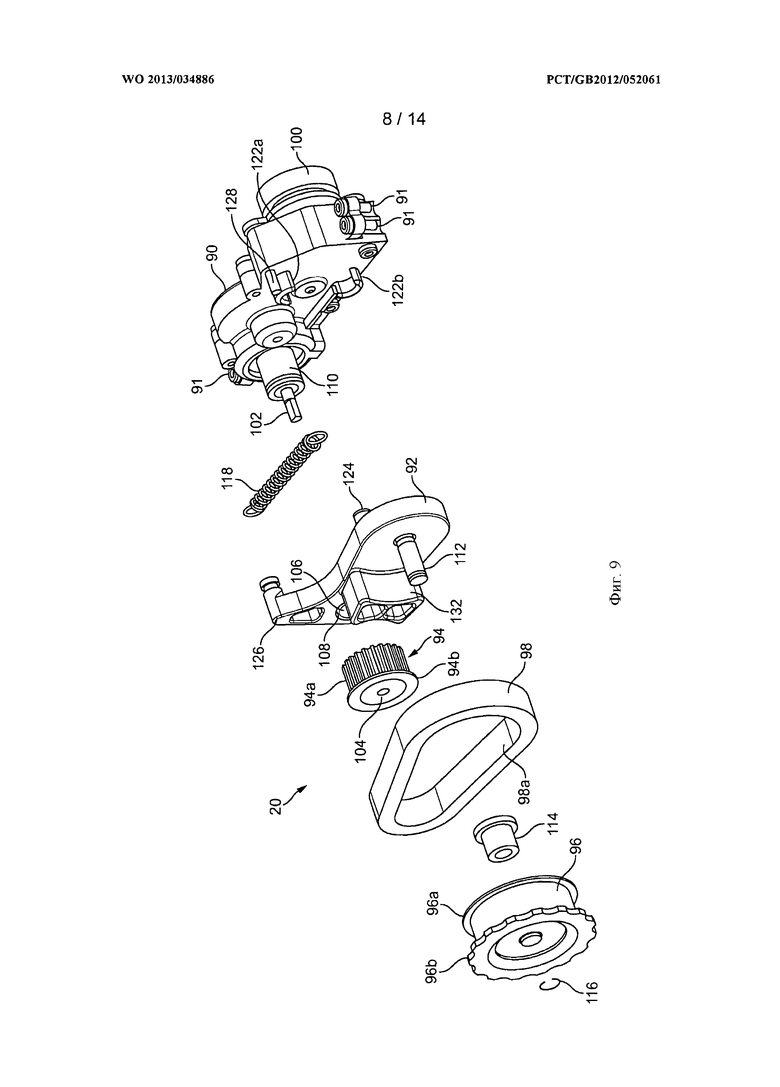
на фиг. 9 показан вид в перспективе по частям тяговой единицы, показанной на фиг. 6a, 6b и 7;
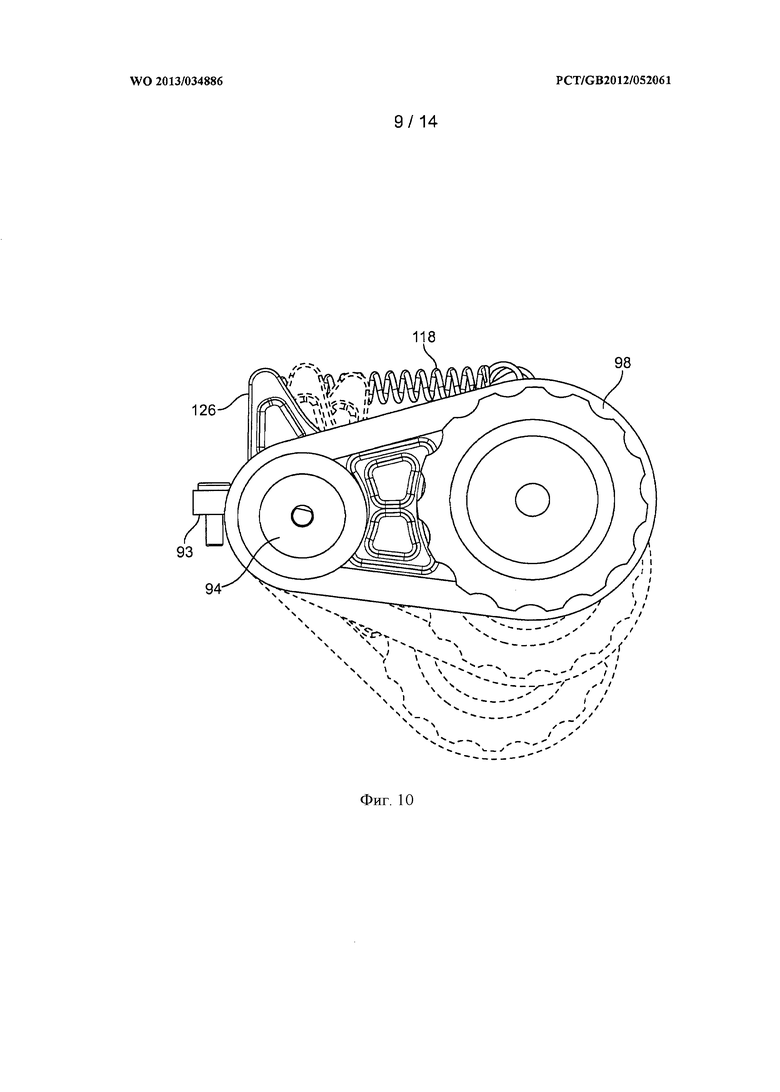
на фиг. 10 приведен вид сбоку тяговой единицы, показанной на фиг. 7, но вид дан для трех положений поворотного рычага;
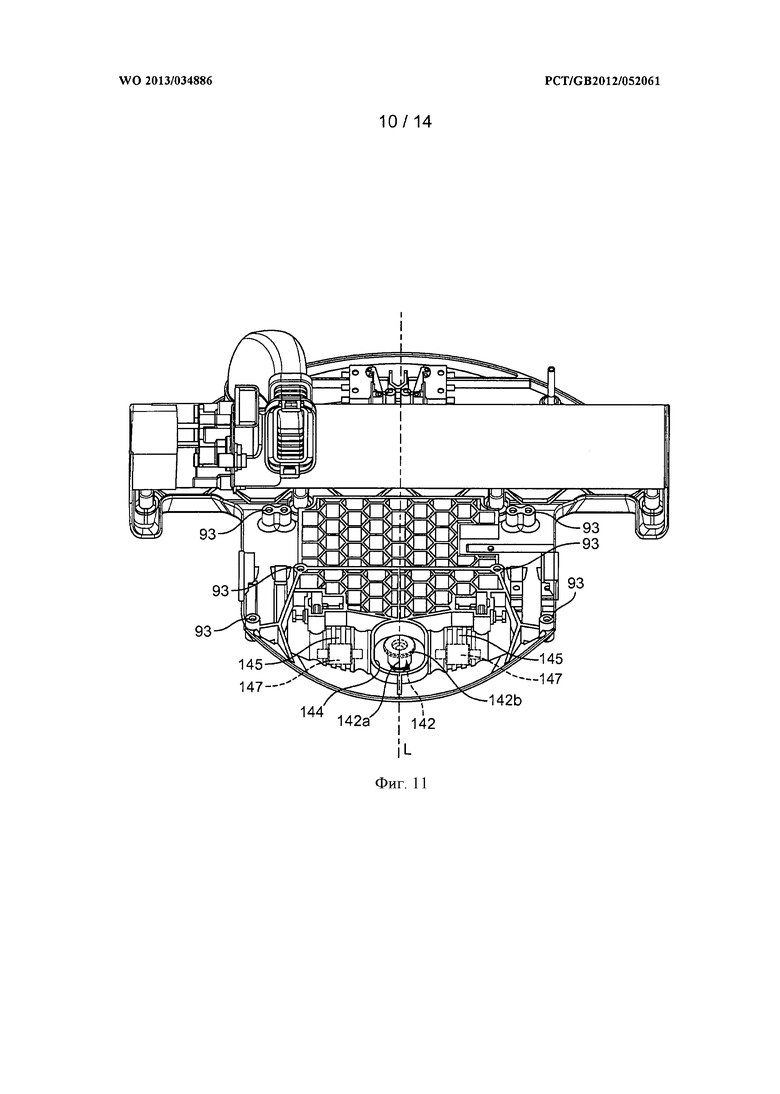
на фиг. 11 приведен вид спереди шасси мобильного робота;
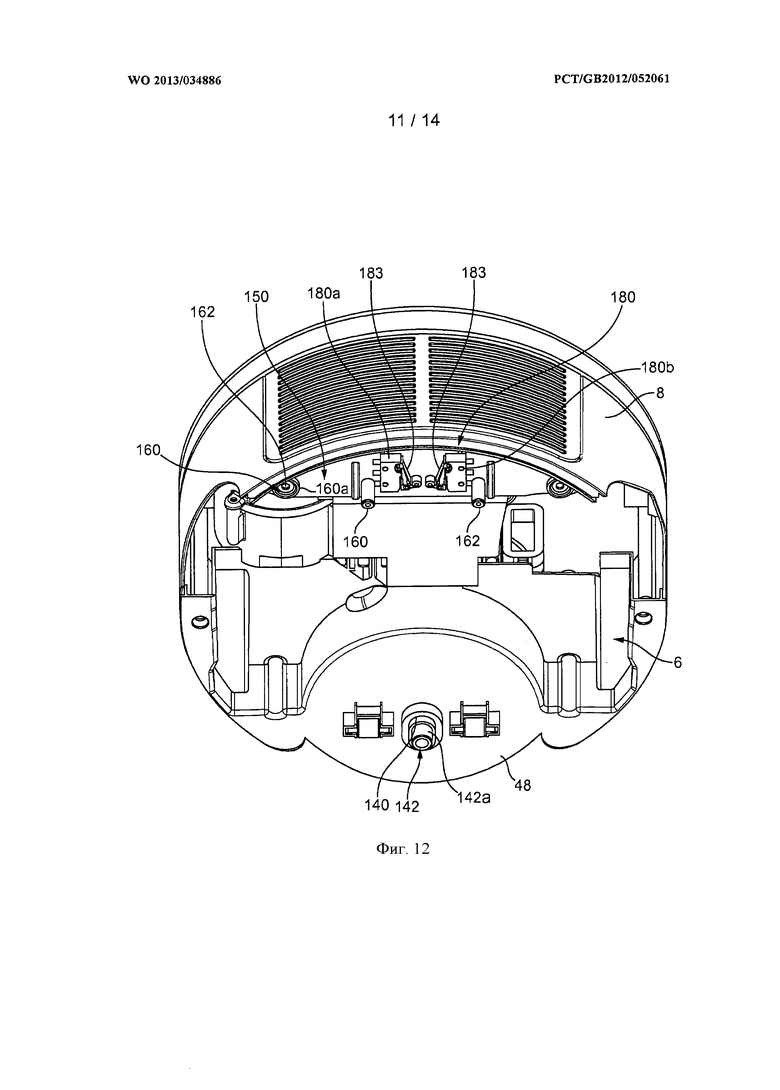
на фиг. 12 приведен вид снизу основного корпуса мобильного робота;
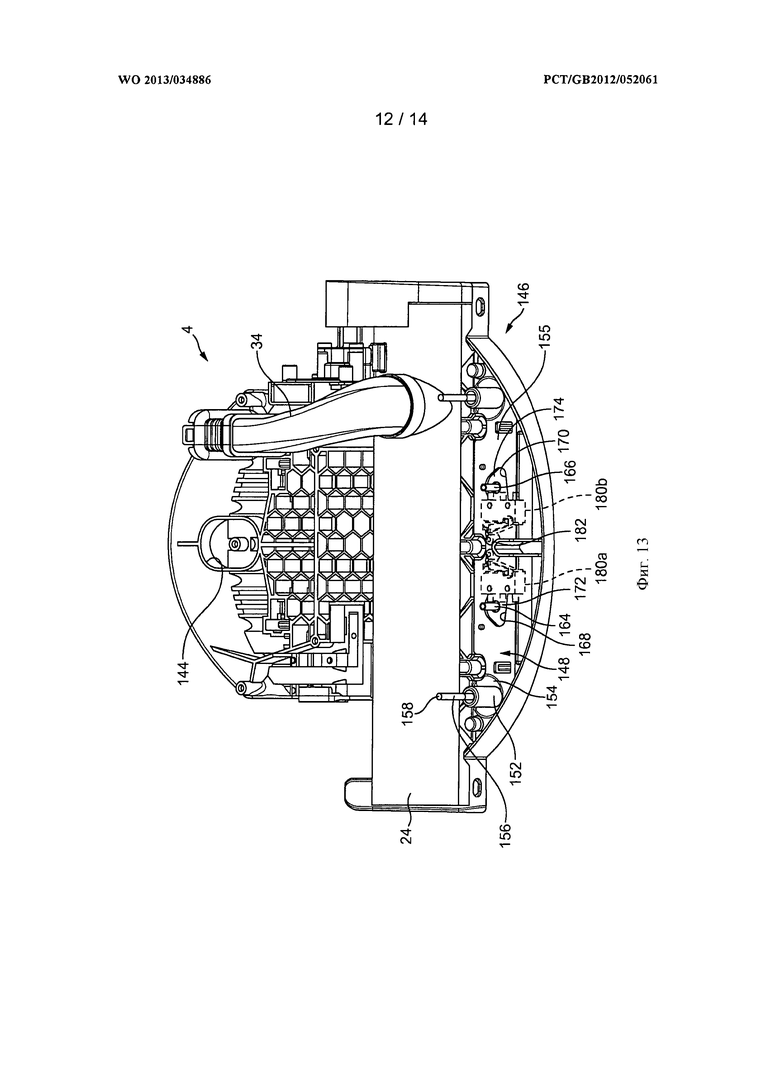
на фиг. 13 приведен вид сзади шасси мобильного робота;
на фиг. 14c, 14b, 14c и 14d показаны схематичные виды робота во время различных "соударений"; и
на фиг. 15 показан схематический вид систем мобильного робота.
Осуществление изобретения
Со ссылкой на фиг. 1, 2, 3, 4 и 5 чертежей, автономное устройство для обработки поверхности в виде робота-пылесоса 2 (всюду далее будем называть его "робот") содержит основной корпус, имеющий четыре главных узла: шасси (или опорную пластину) 4, корпус 6, который расположен на шасси 4, в целом, круглую внешнюю крышку 8, которую устанавливают на шасси 4, и благодаря которой робот 2 имеет, в общем, круглый профиль, и отделительное устройство 10, расположенное на передней части корпуса 6 и которое выступает через вырез 12 дополняющей формы во внешней крышке 8.
Для целей этого описания термины "передний" и "задний" касательно робота будут использоваться в смысле направления его прямого и обратного перемещения во время работы, при этом отделительное устройство 10 расположено в передней части робота. Аналогично, термины "левый" и "правый" будут использоваться относительно прямого направления перемещения робота. Как будет понятно из фиг. 1, основной корпус робота 2, в целом, имеет форму сравнительно короткого круглого цилиндра, в значительной степени, для маневренности, и, таким образом, имеет главную ось "C" цилиндра, которая проходит по существу вертикально относительно поверхности, по которой перемещается робот. Соответственно, ось С цилиндра проходит по существу по нормали к продольной оси "Д" робота, которая направлена продольном направлении робота 2 и, таким образом, проходит через центр отделительного устройства 10. Диаметр основного корпуса предпочтительно принимает значение от 200 мм до 300 мм, и более предпочтительно - от 220 мм до 250 мм. Наиболее предпочтительно, чтобы основной корпус имел диаметр 230 мм, было установлено, что это значение представляет собой особенно действенный компромисс между маневренностью и эффективностью чистки.
Шасси 4 поддерживает несколько компонентов робота 2 и, предпочтительно, выполнено посредством инжекционного формования из высокопрочного пластикового материла, такого как АБС (акрилонитрилбутадиенстирол), хотя оно также может быть сделано из подходящих металлов, таких как алюминий или сталь, или из композитных материалов, таких как композиционный материал из углеродного волокна. Как будет объяснено, основная функция шасси 4 заключается в том, чтобы выступать в качестве ведущей платформы и нести очистительное устройство для чистки поверхности, над которой проходит робот.
Со ссылкой на фиг. 4 и 5, передний участок 14 шасси 4 является сравнительно плоским и имеет форму, похожую на тарелку, и ограничивает изогнутую носовую часть 15, которая образует переднюю часть робота 2. Приводное устройство выполнено из первой и второй тяговых единиц 20, которые установлены в соответствующих выемках 16, 18 с каждого бока переднего участка шасси 4. Отметим, что на фиг. 4 показано шасси 4 с присоединенными тяговыми единицами 20, а на фиг. 5 показано шасси 4 без присоединенных тяговых единиц 20.
Пара тяговых единиц 20 расположена на противоположных сторонах шасси 4, и каждая из них функционирует независимо, чтобы робот мог двигаться в прямом и обратном направлении, чтобы следовать по изогнутой траектории влево и вправо или поворачиваться на месте в любом направлении, в зависимости от скорости и направления вращения тяговых единиц 20. Такое устройство иногда называют дифференциальной передачей, а подробности тяговых единиц 20 будут более полно описаны ниже в этом описании.
Сравнительно узкий передний участок 14 шасси 4 расширяется в сторону заднего участка 22, который включает в себя блок 24 обработки поверхности или "чистящую головку", имеющую, в целом, цилиндрическую форму, и которая проходит перпендикулярно через всю ширину шасси 4 относительно продольной оси "L" и расположена за тяговыми единицами 20 относительно прямого направления перемещения.
Также со ссылкой на фиг. 2, на которой показан робот 2 снизу, чистящая головка 24 ограничивает прямоугольное отверстие 26 для всасывания, которое направлено на опорную поверхность, и в которую при функционировании робота направляют грязь и мусор. Вытянутая щетка 28 расположена в чистящей головке 24, и ее приводят в действие посредством двигателя 30 через редуктор и приводной ремень 32 обычным образом, хотя возможны также и другие приводные конфигурации, такие как одна зубчатая передача.
Низ шасси 4 имеет вытянутый участок 25 опорной пластины, проходящий перед отверстием 26 для всасывания, который включает в себя несколько каналов 33 (из которых для краткости обозначено только два), которые обеспечивают проходы для грязного воздуха, направляемого к отверстию 26 для всасывания. Низ шасси 4 также имеет несколько (в показанном варианте осуществления четыре) пассивных колеса или ролика 31, которые обеспечивают дополнительные точки опоры для шасси 4, когда оно находится в покое или перемещается по поверхности пола. Необходимо отметить, что ролики 31 поддерживают шасси, так что его низ расположен параллельно поверхности пола. Более того, хотя колеса или ролики являются предпочтительными, они также могут быть реализованы в виде жестких опорных точек, таких как полозья или направляющие.
В этом варианте осуществления чистящая головка 24 и шасси 4 представляют собой единую пластиковую отливку, таким образом, чистящая головка 24 выполнена как единое целое с шасси 4. Такая конфигурация эффективна для производства, так как опорная пластина 25 и чистящая головка выполнены в виде одного и того же формованного компонента. Тем не менее, необязательно должно быть так, и два компонента могут быть раздельными, при этом чистящую головку 24 должным образом прикрепляют к шасси 4 посредством винтов или посредством подходящего способа крепления, что понятно специалисту в области техники.
У чистящей головки 24 имеется первая и вторая грани 27, 29, которые проходят по краям шасси 4 позади тяговых единиц 20, и которые выровнены с крышкой 8 робота. Рассматривая горизонтальный профиль или профиль в плане, как на фиг. 2 и 3, можно увидеть, что торцевые грани 27 и 29 чистящей головки 24 являются плоскими и проходят по касательной (обозначенной через "T") к крышке 8 по существу в диаметрально противоположных точках вдоль поперечной оси "X" робота 2. Преимущество этого заключается в том, что чистящая головка 24 может проходить чрезвычайно близко к стенам комнаты, когда робот перемещается в режиме "обхода стен", тем самым, он может осуществлять чистку прямо до стены. Более того, так как торцевые грани 27, 29 чистящей головки 24 проходят по касательной к обеим сторонам робота 2, то он может осуществлять чистку прямо до стены, независимо то того, находится ли стена с правой стороны или с левой стороны робота 2. Необходимо также отметить, что преимущественная способность осуществлять чистку до края усиливается тем, что тяговые единицы 20 расположены внутри крышки 8, что означает, что робот может маневрировать так, что крышка 8 и, поэтому, также торцевые грани 27, 29 чистящей головки 24 почти касаются стены во время обхода стен. Более того, так как чистящая головка проходит поперек по существу через всю ширину шасси 4 и расположена позади тяговых единиц 20, то это значит, что чистящая головка 24 может производить чистку поверхности пола от пыли и частиц, которые могут оставить за собой тяговые единицы при перемещении робота. Чистящая головка 24 расположена позади тяговых единиц 20 и настолько близко к ним, насколько это возможно, так что чистящая головка 24 может проходить через всю ширину робота, минимизируя в то же время "выступы" от основной круглой формы машины, что в противном случае может мешать его способности маневрировать.
Грязь, втянутая в отверстие 26 для всасывания во время чистки, выходит из чистящей головки 24 через патрубок 34, который проходит вверх от чистящей головки 24 и изгибается по дуге в сторону переда шасси 4 примерно на 90°, пока не становится направленным в прямом направлении. Патрубок 34 оканчивается прямоугольным устьем 36 с гибкой гофрированной конструкцией 38, имеющей такую форму, чтобы примыкать к каналу 42, имеющему дополняющую форму, выполненному на корпусе 6.
Канал 42 выполнен на переднем участке 46 корпуса 6 и выходит в направленную вперед, в целом, полуцилиндричесую выемку 50, имеющую в целом круглую платформу 48 основания. Выемка 50 и платформа 48 образуют стыковочный участок, в который при использовании устанавливают отделительное устройство 10, и из которого его можно отделить для опустошения.
Следует отметить, что в этом варианте осуществления отделительное устройство 10 состоит из циклонного сепаратора, описанного, например, в публикации WO 2008/009886, содержимое которой включено в этот документ посредством ссылки. Конфигурация такого отделительного устройства хорошо известна и больше не будет описана в этом документе, причем можно сказать, что отделительное устройство 10 может быть присоединено с возможностью отсоединения к корпусу 6 посредством подходящего механизма, такого как быстросъемное средство крепления, чтобы позволить опустошить устройство 10, когда оно наполнится. Сущность отделительного устройства 10 не является центральной для изобретения, а циклонное отделительное устройство может отделять грязь от потока воздуха с помощью другого средства, известного в области техники, например, с помощью фильтра-мембраны, пористого ящичного фильтра или некоторой другой формы отделительного устройства. Для вариантов осуществления устройства, которое не является пылесосом, корпус 6 может вмещать оборудование, подходящее для выполнения задач, осуществляемых машиной. Например, для полировочной машины основной корпус может вмещать резервуар для полировальной жидкости.
Когда отделительное устройство 10 расположено в стыковочном участке 50, вход 52 для грязного воздуха отделительного устройства 10 входит в канал 42, а другой конец канала 42 можно соединить с устьем 36 патрубка 34 от щетки, так что канал 42 передает грязный воздух от чистящей головки 24 в отделительное устройство 10. Гофра 38 обеспечивает некоторую степень упругости устья 36 канала 34, так что он может плотно соединиться со входом 52 для грязного воздуха отделительного устройства 10, несмотря на некоторые угловые смещения. Хотя здесь была описана гофрированная конструкция, канал 34 также может быть оснащен альтернативным упругим уплотнением, таким как гибкая резиновая уплотнительная манжета, для примыкания ко входу 52 для грязного воздуха.
Грязный воздух втягивают через отделительное устройство 10 посредством генератора воздушного потока, который в этом варианте осуществления представляет собой двигатель и вентилятор (не показан), который расположен в корпусе 60 двигателя, размещенном с левой стороны корпуса 6. Корпус 60 двигателя включает в себя изогнутый вход 62 воздухозаборника, открытый у стенки цилиндрической формы стыковочного участка 50, чтобы совпадать с цилиндрической кривизной отделительного устройства 10. Хотя на фиг. 4 этого не видно, отделительное устройство 10 включает в себя выпуск чистого воздуха, который соединяется с входом 62 воздухозаборника, когда отделительное устройство 10 вставлено в стыковочный участок 50. При использовании всасывающий двигатель может создавать низкое давление в области входа 62 воздухозаборника двигателя, тем самым, втягивая грязный воздух вдоль траектории воздушного потока от отверстия 26 для всасывания чистящей головки 24 через патрубок 34 и канал 42 и через отделительное устройство 10 из входа 52 для грязного воздуха к выпуску чистого воздуха. Чистый воздух затем проходит через корпус 60 двигателя и выходит сзади робота 2 через выпуск 61 воздуха, оборудованный фильтром.
Крышка 8 на фиг. 4 показана отдельно от корпуса 6 и, так как шасси 4 и корпус 6 несут большинство функциональных компонентов робота 2, то крышка 8 обеспечивает внешнюю оболочку, которая по большей части служит в качестве защитной оболочки и для того, чтобы на ней располагался пользовательский интерфейс.
Крышка 8 содержит, в целом, цилиндрическую боковую стенку 71 и плоскую верхнюю поверхность 72, которая обеспечивает по существу круглый профиль, соответствующий профилю в плане корпуса 6, за исключением частично круглого выреза 12, имеющего такую форму, чтобы дополнять форму стыковочного участка 50 и цилиндрического отделительного устройства 10. Более того, можно видеть, что плоская верхняя поверхность 72 крышки 8 находится в одной плоскости с верхней поверхностью 10a отделительного устройства 10, которое, таким образом, находится на одном уровне с крышкой 8, когда она установлена на основной корпус.
Как можно особенно четко увидеть на фиг. 2, частично круглый вырез 12 крышки 8 и полуцилиндрическая выемка 50 в корпусе 6 обеспечивают в стыковочном участке подковообразный участок, ограничивающий два выступающих выступы или лапы 73a, которые располагаются по бокам с каждой стороны отделительного устройства 10 и оставляют между собой приблизительно 5% и 40%, предпочтительно 20% устройства 10, выступающего спереди стыковочного участка 50. Поэтому, участок отделительного устройства 10 остается снаружи, даже если крышку 8 устанавливают на место на основном корпусе робота 2, что позволяет пользователю быстро получить доступ к отделительному устройству 10 для его опустошения. Боковые выступы особенно подходят для размещения в них модулей датчиков, обозначенных в этом документе через 82, которые могут использоваться роботом для того, чтобы составить карту окружающей его обстановки и/или определить препятствия. В этом случае материал, из которого выполнены выступы 73, должен быть подходящим прозрачным для датчиков материалом. Модули датчиков могут представлять собой любые датчики, пригодные для навигации робота, такие как лазерные дальномеры, ультразвуковые преобразователи, позиционно-чувствительные устройства (PSD) или оптические датчики.
Противоположные участки боковой стенки 71 включают в себя дугообразную выемку 74 (на фиг. 3 показана только одна), которые насаживают на соответствующие торцы 27, 29 чистящей головки 24, когда крышку 8 соединяют с корпусом 6. Как можно увидеть на фиг. 1, между торцами чистящей головки 24 и соответствующими арками 74 имеется зазор, предназначенный для того, чтобы допустить относительное смещение между ними в случае столкновения с объектом.
Как было отмечено, отделительное устройство 10 в примере осуществления представляет собой цилиндрический контейнер, который размещен в стыковочном участке 50 робота и выступает из крышки 8, так чтобы задавать переднюю часть робота 2. Отметим, что контейнер 10 направлен вертикально, так что его продольная ось нормальна и к продольной и к поперечной осям L, X робота 2, и, поэтому, параллельна его цилиндрической/вертикальной оси C. Выступающий участок отделительного устройства 10, открытый в передней части робота 2, таким образом, позволяет пользователю легко получить доступ к отделительному устройству 10, чтобы удалить его из робота 2, когда требуется его опустошить. Поэтому, пользователю не нужно совершать какие-либо действия с дверцами, заслонками или панелями, чтобы получить доступ к отделительному устройству 10. Более того, отделительное устройство может быть прозрачным, так что пользователь может видеть, насколько заполнено отделительное устройство, таким образом, отпадает необходимость в наличии механических или электронных индикаторов наполнения контейнера. Более того, отделительное устройство, в частности, циклонное отделительное устройство, легче, чем электронные компоненты, такие как двигатели и батареи, так что конфигурация отделительного устройства в передней части робота дополнительно способствует его способности взбираться вверх по поверхностям. Тем не менее, в машинах существующего уровня техники имеется тенденция к расположению более тяжелых компонентов спереди, а контейнеры для пыли располагают сзади или ближе к центру машины.
Дополнительное преимущество заключается в том, что отделительное устройство 10 действует как упор для робота 2, так как то, что оно является самой передней частью робота, означает, что это будет первая часть робота, которая войдет в контакт с препятствием во время столкновения. Предпочтительно, чтобы контейнер был выполнен из пластика, обладающего подходящими механическими свойствами, чтобы обеспечить некоторую степень упругости в случае столкновения робота с препятствием. Один из примеров - прозрачный АБС (акрилонитрилбутадиенстирол), подходящей толщины (например, примерно от 0,5 мм до 2 мм), чтобы обеспечить контейнер 10 достаточной степенью упругости. Поэтому, контейнер 10 обеспечивает некоторую степень защиты основного корпуса робота 2 от жестких и/или острых объектов, которые в противном случае могут повредить крышку 8. Аналогично, упругость контейнера обеспечивает некоторую степень защиты препятствий при столкновениях, которые могут быть чувствительны к повреждениям.
На верхнем крае боковой стенки 71 крышка 8 включает в себя полукруглую ручку 76 для переноски, которую можно поворачивать вокруг двух диаметрально противоположных втулок 78 между первым, сложенным положением, в котором ручка 76 входит в выемку 80 на верхнем внешнем крае крышки 8, имеющую дополняющую форму, и развернутым положением, в котором она проходит вверх (на фиг. 1 показано пунктиром). В сложенном положении ручка сохраняет "чистый" круглый профиль крышки 8 и незаметна во время обычного функционирования робота 2. Также в этом положении ручка 76 служит для запирания задней дверцы фильтра (не показана) робота в закрытом положении, предотвращая случайное удаление дверцы фильтра во время функционирования робота 2.
При функционировании робот 2 способен автономно передвигать себя по окружающей обстановке, получая энергию от блока аккумуляторных батарей (не показан), расположенного в корпусе 6. Для этого в роботе 2 имеется соответствующее средство управления, которое связано с блоком батарей, тяговые единицы 20 и соответствующие модули 82 датчиков, содержащие, например, инфракрасные или ультразвуковые передатчики и приемники на передней левой и правой стороне корпуса 6. Комплект датчиков 82 обеспечивает средство управления информацией, представляющей расстояние робота до различных признаков в окружающей обстановке и размер и форму признаков. Дополнительно, средство управления связано с всасывающим двигателем и двигателем щетки, чтобы соответствующим образом приводить в действие и управлять этими компонентами. Средство управления, поэтому, может управлять тяговыми единицами 20, чтобы перемещать робота 2 по комнате, которую необходимо почистить. Необходимо отметить, что отдельный способ функционирования и перемещения робота-пылесоса не является существенным для изобретения, и что в области техники известно несколько таких способов управления. Например, один частный способ функционирования более подробно описан в WO 00/38025, где в навигационной системе используют устройство детектирования света. Это позволяет пылесосу определять свое местоположение в комнате путем идентификации того, когда уровни освещения, определенные устройством детектирования света, являются такими же или по существу такими же, что и уровни освещенности, определенные устройством детектирования света, ранее.
После описания шасси 4, корпуса 6 и крышки 8, теперь более подробно опишем тяговые единицы 20 со ссылкой на фиг. 6-10, на которых для ясности показаны различные виды в перспективе, в разрезе и по частям одной тяговой единицы.
В целом, тяговая единица 20 содержит корпус 90 трансмиссии, соединительный элемент 92 или "поворотный рычаг", первый и второй шкивы 94, 96 и гусеницу или бесконечный ремень 98, натянутый вокруг шкивов 94, 96.
Корпус 90 трансмиссии содержит зубчатую передачу, которая проходит между входным модулем 100 приводного двигателя, установленным на внутренней стороне одного торца корпуса 90 трансмиссии, и выходным приводным валом 102, который выступает со стороны привода корпуса 90 трансмиссии, то есть со стороны корпуса 90 трансмиссии, отличной от той, на которой установлен модуль 100 двигателя. Модуль 100 двигателя в этом варианте осуществления представляет собой бесщеточный электродвигатель постоянного тока, так как такой двигатель является надежным и эффективным, хотя это не мешает использовать другие типы двигателей, например, электродвигатель постоянного тока со щетками, шаговые двигатели или даже гидравлические приводы. Как было отмечено, модуль 100 двигателя связан со средством управления, чтобы получать энергию и управляющие сигналы, и для этого он оборудован интегральным электрическим разъемом 104. Зубчатая передача в этом варианте осуществления представляет собой колесную конструкцию, которая снижает скорость модуля 100 двигателя, увеличивая доступный крутящий момент, так как такая система является надежной, компактной и легкой. Те не менее, в контексте изобретения допустимы другие конструкции передачи, такие как ременная или гидравлическая трансмиссия.
Поэтому тяговая единица 20 объединяет приводную, передаточную и функции и функцию сцепления с полом в одном замкнутом и независимо приводимым в действие блоке, и ее можно быстро установить на шасси 4 с помощью нескольких крепежей 91 (в этом варианте осуществления с помощью четырех крепежей), например, винтов или болтов, которые входят в соответствующие монтажные ушки 93, расположенные вокруг выемки шасси 4.
Тяговую единицу 20 устанавливают на шасси так, чтобы первый шкив 94 был впереди, когда робот 2 перемещается вперед. В этом варианте осуществления переднее колесо 94 является ведущим колесом и включает в себя центральное отверстие 104, в которое вставляют приводной вал 102 посредством прессовой посадки. Также допустимы альтернативные способы крепления шкива на валу, такие как полукруглый зажим ("пружинное стопорное кольцо"), присоединенное к валу 102. Переднее колесо 94 также можно рассматривать как колесо цепной передачи, так как оно является ведущим колесом в паре. Чтобы увеличить передачу приводного усилия от приводного вала 102 к переднему колесу 94, центральное отверстие 94 шкива может содержать внутренний элемент, стыкующийся с внешним элементом на приводном валу.
Поворотный рычаг 92 включает в себя передний конец, который установлен на корпусе 90 трансмиссии между ним и передним колесом 94, причем установлен так, чтобы поворачиваться вокруг приводного вала 102. Втулку 106, расположенную в установочном отверстии 108 поворотного рычага 92, вставляют в выступающую наружу втулку ПО корпуса 90 трансмиссии, через которую проходит приводной вал 102. Поэтому, втулка 106 обеспечивает опорную поверхность между втулкой 110 и поворотным рычагом 92, чтобы позволить поворотному рычагу 92 плавно поворачиваться и чтобы предотвратить отклонения относительно корпуса 90 трансмиссии. Втулку 106 предпочтительно выполняют из подходящей конструкционной пластмассы, такой как полиамид, которая обеспечивает требуемую поверхность с низким коэффициентом трения и при этом высокую прочность. Тем не менее, втулка 106 также может быть выполнена из металла, такого как алюминий, сталь или их сплавов, которые также обеспечивают необходимые характеристики трения и прочности.
Как показано на видах в сборе, поворотный рычаг 92 установлен на втулке 110, а переднее колесо 94 установлено на приводном валу 102 снаружи переднего конца поворотного рычага 92. Вал 112 колеса посредством прессовой посадки установлен в отверстии, расположенном на противоположном или "заднем" конце поворотного рычага 92, и задает установочный вал для заднего шкива 96 или "заднего колеса" вдоль оси вращения, параллельной оси приводного вала 102. Заднее колесо 96 включает в себя центральное отверстие 113, в которое посредством прессовой посадки устанавливают втулку подшипника 114. Втулку 114 насаживают на вал 112 посредством скользящей посадки, так что втулка, и, следовательно, также заднее колесо 96, может поворачиваться относительно поворотного рычага 92. Пружинное стопорное кольцо 116 прикрепляет заднее колесо к валу 112.
Бесконечный ремень или гусеница 98 обеспечивает соединение между роботом 2 и поверхностью пола и, в этом варианте осуществления, выполнен из прочного прорезиненного материала, который обеспечивает робота хорошим сцеплением, когда робот перемещается по поверхности и преодолевает изменения текстуры и контуров поверхности. Хотя на фигурах не показано, на ремне 98 может иметься рисунок протектора, чтобы увеличить сцепление с текстурированным и неровным рельефом.
Аналогично, хотя на фигурах не показано, внутренняя поверхность 98a ремня 98 является зазубренной или зубчатой, чтобы сцепляться с комплементарными зубчатыми образованиями 94a, выполненными на периферийной поверхности переднего колеса 94, что уменьшает вероятность того, что ремень 98 соскользнет с колеса 94. В этом варианте осуществления на заднем колесе 96 не имеется комплементарных зубчатых образований, хотя если есть желание, то их можно выполнить. Для защиты от соскальзывания ремня 98 с заднего колеса 96 на его внутреннем и внешнем ободе выполнены периферические выступы 96a, 96b. Что касается переднего колеса 94, то периферийный выступ 94b выполнен только на внешнем ободе, так как ремень 98 не может соскользнуть с внутреннего обода, прилегающего к участку поворотного рычага 92.
Как будет понятно, поворотный рычаг 92 закрепляет переднее и заднее колеса 94, 96 на некотором расстоянии друг от друга и позволяет заднему колесу 96 отклоняться под углом относительно переднего колеса 94. Максимальный и минимальный пределы углового перемещения поворотного рычага 92 заданы противоположными дугообразными верхним и нижним стопорами 122a, 122b, которые выступают от приводной стороны корпуса 90 трансмиссии. Выступ или штифт 124, отходящий от внутренней стороны поворотного рычага 92, может зацепляться за стопоры 122a, 122b для ограничения перемещения поворотного рычага 92.
Тяговая единица 20 также содержит средство смещения поворотного рычага в виде цилиндрической пружины 118, которая установлена в натянутом состоянии между монтажным кронштейном 126, проходящим вверх от переднего участка поворотного рычага 92, и штифтом 128, выступающим от заднего участка корпуса 90 трансмиссии. Пружина 118 смещает заднее колесо 96 для его контакта с поверхностью пола во время использования и, таким образом, увеличивает сцепление, когда робот 2 преодолевает неровную поверхность, такую как ковер с длинным ворсом, или взбирается через препятствие, такое как электрический кабель. На фиг. 10 показаны три типовых положения тяговой единицы 20 в диапазоне перемещения поворотного рычага 92.
На фиг. 7 показано взаимное расположение колес 94, 96 относительно поверхности F пола, когда робот 2 находится в покое, и в этом положении поворотный рычаг 92 находится у минимальной границы перемещения, при этом штифт 124 упирается в верхний стопор 122a. В этом положении участок гусеницы 98 вокруг заднего колеса 96 задает пятно 130 контакта с поверхностью пола, в то время как участок гусеницы 98, находящийся спереди от пятна контакта и проходящий к переднему колесу, наклонен относительно поверхности F пола из-за большего радиуса заднего колеса 96 по сравнению с передним колесом 94. Это обеспечивает наличие у тяговой единицы 20 наклонной поверхности для взбирания, которая повышает возможность робота 2 взбираться на неровности поверхности пола, а также на приподнятые препятствия, такие как, например, электрические кабели/шнуры или края ковров. В качестве альтернативы, понятно, что колеса 94, 96 также могут иметь близкие или даже одинаковые размеры, и могут быть установлены на разных высотах, либо на поворотном рычаге 92, либо, как вариант, в фиксированных относительно шасси 4 местах, чтобы обеспечить направленную вперед в направлении перемещения наклонную поверхность для взбирания.
В дополнение к улучшению способности взбираться наклонной гусеницы 98 по сравнению с простым колесом, тяговая единица 20 поддерживает небольшое пятно 130 контакта посредством одного заднего колеса 96, что повышает маневренность, так как не страдает от бокового скольжения, которое могло бы иметь место, если значительный участок гусеницы 98 находился в контакте с поверхностью пола.
Дополнительное улучшение сцепления обеспечивается внешним выступом 96b заднего колеса 96, который проходит радиально наружу дальше, чем выступ 96a на внутренней стороне колеса 96. Как ясно показано на фиг. 8, внешний выступ 96b проходит почти до того же радиуса, что и внешняя поверхность гусеницы 98, а на его крае имеются зубчатые или зазубренные образования. Преимущество этого заключается в том, что в обстоятельствах, когда робот перемещается по мягкой поверхности, такой как плед или ковер, будет иметь место тенденция к тому, что гусеница 98 будет погружаться в ворс ковра, в результате чего зазубренный край внешнего выступа 96b войдет в контакт с ковром и обеспечит робота повышенным сцеплением. Тем не менее, на твердых поверхностях с поверхностью пола будет контактировать только гусеница 98, что будет благоприятно для маневренности робота.
Еще одно преимущество заключается в том, что гусеничная конструкция обеспечивает намного большую способность взбираться, чем одно колесо, но при меньших размерах, что позволяет располагать щетку очень близко к поперечной оси робота, что важно для обеспечения чистки по всей ширине. Как видно в этом варианте осуществления, ось вращения заднего колеса 96 находится по существу на одной прямой с поперечной осью робота, что благоприятно для маневренности. Чистящую головку можно расположить очень близко к тяговым единицам 20, и в этом варианте осуществления ось чистящей головки находится на расстоянии примерно 48 мм от поперечной оси робота, хотя предполагается, что расстояние до 60 мм будет приемлемым, чтобы минимизировать величину, на которую чистящая головка выступает из внешнего контура основного корпуса.
В альтернативном варианте осуществления (не показан) глубина и толщина внешнего выступа 96b увеличена так, чтобы поверхность выступа 96b лежала на одной линии с внешней поверхностью гусеницы 98, окружающей заднее колесо 96, фактически обеспечивая поперечное расширение поверхности гусеницы 98. Это увеличивает площадь пятна 130 контакта также на твердых поверхностях, что может быть желательно в некоторых обстоятельствах. В этом варианте осуществления должно быть понятно, что способность взбираться также сохраняется поверхностью наклонной гусеницы без увеличения пятна контакта в продольном направлении гусеницы 98.
Как объяснялось, тяговые единицы 20 робота 2 обеспечивают увеличенную способность перемещаться по коврам и пледам с высоким ворсом, а также преодолевать препятствия, такие как электрические кабели на полу, а также небольшие уступы между поверхностями пола. Тем не менее, тяговые единицы "гусеничного" типа могут быть чувствительны к попаданию мусора между колесами и ремнем. Для защиты от этого поворотный рычаг 92 дополнительно включает в себя выступающий участок 132 в виде перегородки, который проходит наружу от поворотного рычага 92 в пространство, ограниченное противоположными частями переднего и заднего колеса 94, 96 и внутренней поверхностью гусеницы 98. Боковые поверхности 132a, 132b, 132c, 132d блока 132, защищающего от мусора, имеют такую форму, чтобы располагаться близко к смежным поверхностям колес 94, 96 и ремня 98, в то время как внешняя поверхность 134 блока 132 заканчивается приблизительно на одной линии с внешними гранями колес 94, 96. Поэтому, блок 132 имеет такую форму, чтобы по существу заполнять весь объем между колесами 94, 96 и, таким образом, предотвращать засорение приводного устройства мусором, таким как частицы или камешки. Хотя блок 132 мог бы быть сплошным, в этом варианте осуществления блок 132 включает в себя отверстия 136, которые уменьшают вес пружинного рычага 92, а также его стоимость. Хотя блок 132 предпочтительно выполнен как единое целое с поворотным рычагом 92, он также может представлять собой отдельный компонент, прикрепленный соответствующим образом к поворотному рычагу 92, например, с помощью зажимов, винтов или клея.
Теперь обратимся к фиг. 11, 12 и 13, на них показано, как корпус 6 присоединяют к шасси 4, чтобы допустить сдвиг этих частей друг относительно друга, и как это относительное перемещение интерпретирует робот 2, чтобы собрать информацию о столкновениях с объектами на своем пути.
Чтобы допустить относительный сдвиг между шасси 4 и корпусом 6, переднее и заднее соединительное средства скрепляют шасси 4 и корпус 6 друг к другом, так чтобы их нельзя было разделить в вертикальном направлении, в направлении нормальном к поперечной и продольной осям X, L робота 2, но чтобы допускался небольшой сдвиг одного относительно другого.
Сначала обратимся к переднему участку основного корпуса, как лучше видно на фиг. 12, переднее соединительное средство включает в себя щелевидное отверстие 140, которое по существу является овальным в форме, похожей на гоночный трек/стадион или усеченного с двух сторон круга, которое выполнено в переднем участке корпуса 6, в частности, в центре платформы 48. Подвижный поворотный элемент в форме поршневого пальца 142 вставляют через отверстие 140, и он включает в себя трубчатый участок 142a, который проходит немного ниже отверстия 140 и который задает верхнюю кромку 142b, которая прилегает к сторонам отверстия и, таким образом, предотвращает прохождение через него поршневого пальца 142.
Соединительное средство также включает в себя комплементарную структуру на переднем участке шасси 4 в виде выемки 144 со стенками, которая также имеет форму гоночного трека, чтобы соответствовать форме отверстия 140 в платформе 48. Корпус 6 устанавливают на шасси 4, так что отверстие 140 на платформе 48 корпуса 6 накладывается на выемку 144 в шасси 4. Затем, поршневой палец 142 прикрепляют к полу выемки 144 посредством подходящего механического крепежа, такого как винт; на фиг. 11 поршневой палец 142, расположенный на месте в выемке 144 показан пунктиром. Корпус 6, таким образом, соединен с шасси 4, не давая возможности вертикального разъединения. Тем не менее, так как поршневой палец 142 неподвижно прикреплен к шасси 4, имея при этом возможность смещаться в отверстии 140, то корпус 6 может смещаться относительно поршневого пальца 142 и может поворачиваться под углом вокруг него, благодаря своей круглой форме.
Передний участок шасси 4 также включает в себя два канала 145, по одному с каждой стороны выемки 144, которые служат в качестве опорной поверхности для соответствующих роликов 147, выполненных снизу корпуса 6, и, более конкретно, на платформе 48 с обеих сторон отверстия 140. Ролики 147 обеспечивают опору для корпуса 6 на шасси 4 и способствуют плавному скольжению двух частей друг относительно друга, и они показаны пунктиром на фиг. 11.
Заднее соединительное средство ограничивает перемещение заднего участка 150 корпуса 6 относительно шасси 4. Сравнивая фиг. 12 и фиг. 13, можно увидеть, что задний участок 146 шасси 4 позади чистящей головки 24 включает в себя средство 148 определения столкновения, которое также служит в качестве надежного крепления, посредством которого задний участок 150 корпуса 6 соединяют с шасси 4.
Каждая сторона средства определения столкновения включает в себя средство поддерживания корпуса; причем оба средства поддерживания корпуса идентичны и, таким образом, ниже для краткости будет описано только одно. Средство поддерживания корпуса содержит трубчатый опорный элемент 152, который расположен в чашеобразной выемке 154, выполненной в шасси 4. В этом варианте осуществления чашеобразная выемка 154 выполнена в съемном участке шасси в виде пластинчатого элемента 155, который закреплен поперек заднего участка 146 шасси 4. Тем не менее, выемка 154 также может быть выполнена как единое целое с шасси 4.
К шасси 154 своим нижнем концом присоединена пружина 156, которая проходит через трубчатый элемент 152, причем конец пружины заканчивается ушком 158. Втулка 152 и пружина 156 соединяются с дополняющим гнездом 160 на нижней стороне корпуса 6, причем гнездо 160 включает в себя приподнятую стенку 160a, к которой примыкает верхний конец втулки 152, когда корпус 6 устанавливают на шасси 4. При установке таким образом, пружина 156 проходит в центральное отверстие 162 в гнезде 160, и ушко 158 прикрепляют шплинтом в корпусе 6. Отметим, что шплинт не показан на фигурах, но может представлять собой любой шплинт или подходящую точку крепления, к которой можно прикрепить пружину 156.
Так как опорные трубчатые элементы 152 установлены с возможностью перемещения между шасси 4 и корпусом 6, то трубчатые элементы 152 можно отклонять в любом направлении, что позволяет корпусу 152 "колебаться" линейно вдоль продольной оси "L" робота, а также это позволяет заднему участку корпуса 6 смещаться под углом, поворачиваясь вокруг поршневого пальца 142 примерно на 10 градусов, в соответствии с ограничением заднего соединительного средства, как будет теперь дополнительно объяснено. В этом варианте осуществления пружины 156 обеспечивают самоцентрирующую силу для опорных трубчатых элементов 152, которая направляет трубчатые элементы 152 в вертикальное положение, при этом это действие также обеспечивает возвратное усилие для системы определения столкновения. В альтернативном варианте осуществления (не показан) опорные трубчатые элементы 152 могут быть сплошными, а усилие для "восстановления" положения корпуса относительно шасси может воздействовать посредством альтернативного смещающего механизма.
Хотя трубчатые элементы 152 позволяют корпусу 6 "двигаться" на шасси 4, допуская конкретную величину поперечного перемещения, они соединяют задний участок 150 корпуса 6 с шасси 4 не прочно, препятствуя вертикальному разъединению. Для этого средство 148 определения столкновения включает в себя первый и второй направляющие элементы в виде столбиков или стержней 160, 162, выполненных на корпусе 6, которые примыкают к соответствующим штифтам 164, 166, выполненным на шасси 4. Как можно увидеть на фиг. 13, штифты 164, 166 проходят через соответствующие окна 168, 170, выполненные в пластинчатом элементе 155, и их удерживают там посредством соответствующих шайб 172, 174. Чтобы установить задний участок 150 корпуса 6 на задний участок 146 шасси 4, направляющие элементы 160, 162 плотно насаживают на штифты 164, 166 до тех пор, пока они не упрутся в соответствующие шайбы 172, 174. Поэтому, перемещение заднего участка 150 корпуса 6 ограничено формой окон 168, 170, так что окна выступают в качестве направляющих. В этом варианте осуществления окна 168, 170, в целом, имеют треугольную форму, таким образом, это позволит корпусу 6 линейно сдвигаться относительно поршневого пальца 142, а также поворачиваться вокруг него в пределах перемещения, заданных окнами 168, 170. Тем не менее, следует отметить, что допустимое перемещение корпуса 6 может быть изменено путем придания соответствующей формы окнам 168, 170.
Средство 148 определения столкновения также включает в себя переключающее средство 180 для определения перемещения корпуса 6 относительно шасси 4. Переключающее средство 180 включает в себя первый и второй миниатюрные переключатели 180a, 180b (также известные как "микропереключатели") мгновенного действия, выполненные на нижней стороне заднего участка 150 корпуса 6, которые, если корпус 6 установлен на шасси 4, расположены с обеих сторон привода 182, выполненного в центральной части заднего участка 146 шасси 4. В этом варианте осуществления привод 182 имеет клинообразную форму с наклонными передними краями для активации переключателей 180a, 180b. Хотя на фигурах не показано, переключатели 180a, 180b связаны со средством управления робота. Расположение переключателей 180a, 180b относительно клинообразного привода 182 показано на фиг. 13; отметим, что переключатели 180a, 180b изображены пунктиром. Как можно видеть, переключатели 180a, 180b расположены так, что рычаги 183, приводящие их в действие непосредственно примыкают к ним и к обеим сторонам передних краев клинообразного привода 182.
Переключатели 180a, 180b активируют в условиях, когда робот 2 сталкивается с препятствием при перемещении робота по комнате во время уборки. Такое устройство определения столкновения желательно для автономного пылесоса, так как системы датчиков и построения карты у таких роботов могут быть ненадежными, и иногда препятствие может не быть вовремя обнаружено. Другие роботы-пылесосы функционируют по методу "случайных ударов", в котором средство для определения столкновений является неотъемлемым. Поэтому, требуется устройство определения столкновения для детектирования столкновений, так чтобы робот мог совершить маневр обхода препятствия. Например, управляющее средство может просто отвести робота назад, а затем возобновить движение вперед в другом направлении или, как вариант, прекратить движение вперед, повернуть на 90° или на 180°, а затем снова возобновить движение вперед.
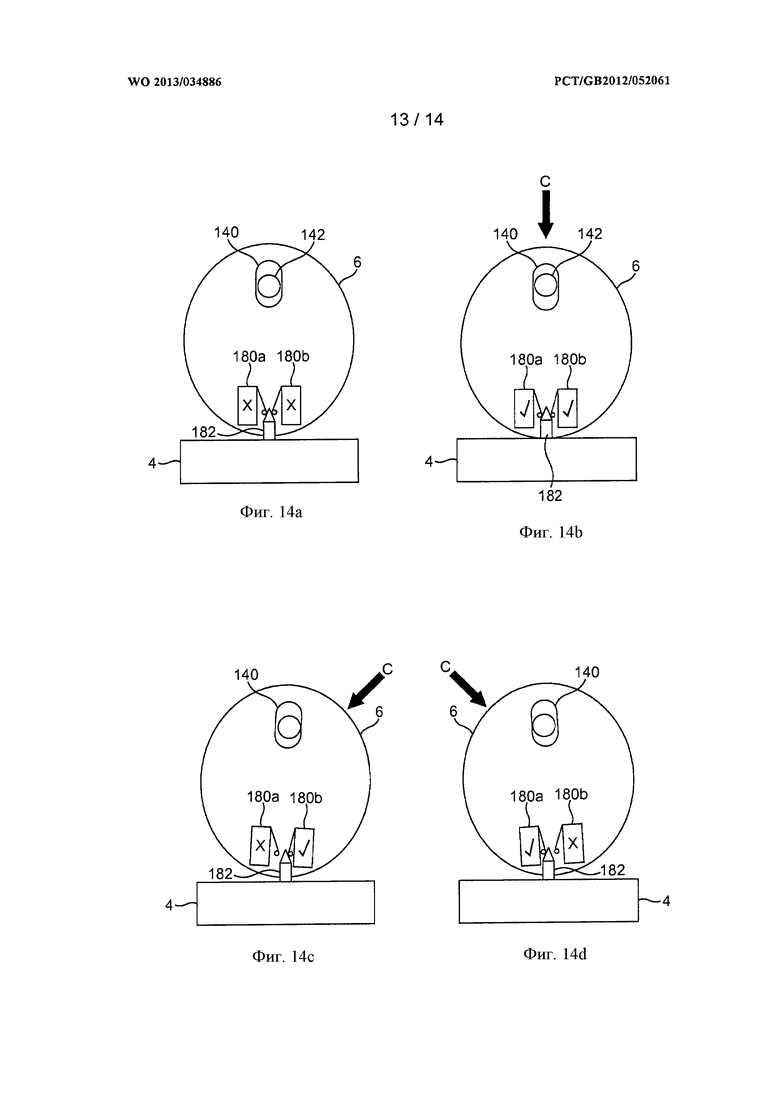
Теперь со ссылкой на фиг. 14a, 14b, 14c, на которых показано схематическое представление шасси 4, корпуса 6 и средства определения столкновения при различных столкновениях, будет описана активация переключателей 180a, 180b. На следующих фигурах части общие с предыдущими фигурами обозначены теми же ссылочными позициями.
На фиг. 14a показано взаимное расположение корпуса 6, шасси 4, поршневого пальца 142, отверстия 140 для поворота корпуса, переключателей 180a, 180b и клинообразного привода 182 при отсутствии столкновения. Как видно, ни один из переключателей 180a, 180b не активирован, что обозначено через "X".
На фиг. 14b показан робот 2 при столкновении с препятствием "прямо по курсу", что обозначено стрелкой C. В результате, корпус 6 линейно смещен назад, то есть вдоль своей продольной оси L, и, соответственно, два переключателя 180a, 180b смещены назад относительно клинообразного привода 182, тем самым, включая переключатели 180a, 180b по существу одновременно, что обозначено галочками.
Как вариант, если робот 2 сталкивается с препятствием справа, как показано стрелкой C на фиг. 14c, то корпус 6 будет повернут вокруг поршневого пальца 142 налево, и в этих обстоятельствах переключатели 180a, 180b сместятся влево относительно привода 182, что приведет к тому, что правый переключатель 180b будет активирован до активизации левого переключателя 180a, как обозначено галочкой для переключателя 180b.
Наоборот, если робот 2 сталкивается с препятствием слева, как показано стрелкой С на фиг. 14d, то корпуса 6 будет повернут направо, и в этом случае переключатели 180a, 180b сместятся вправо относительно привода 182, в результате чего левый переключатель 180a будет активирован до активизации правого переключателя 180b, как обозначено галочкой для переключателя 180a.
Хотя при столкновениях под углом, показанных на фиг. 14c и 14d, активированным изображен только один из переключателей 180a, 180b, надо понимать, что при таком столкновении также может включиться другой переключатель, хотя и позже, чем первый активированный переключатель.
Так как переключатели 180a, 180b связаны со средством управления робота, то средство управления может распознать направление удара путем отслеживания включения переключателей 180a, 180b и относительного времени между включениями переключателей.
Так как робот 2 может определить столкновения, воспринимая относительное линейное и угловое смещение между корпусом 6 и шасси, то изобретение устраняет необходимость установления на перед робота защитной оболочки от ударов, что обычно делают в известных роботах-пылесосах. Защитные оболочки от ударов могут быть ломкими и громоздкими, так что изобретение повышает надежность робота, а также делает возможным сокращение размера и сложности.
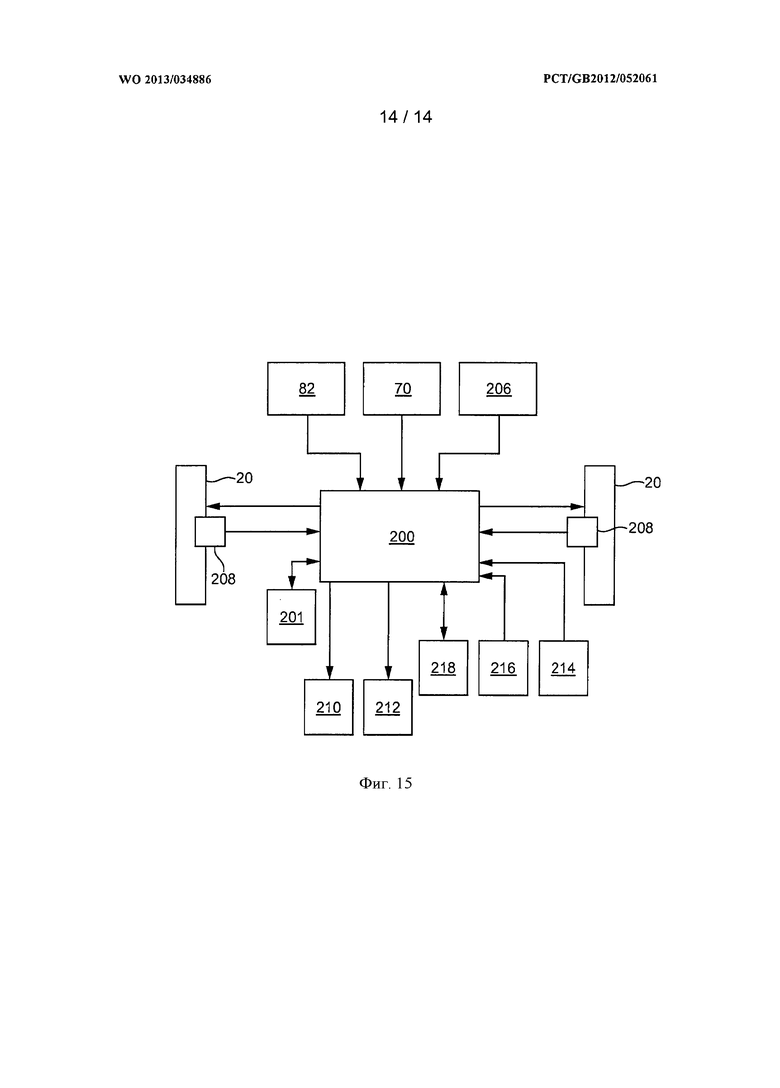
Обратимся теперь к фиг. 15, на ней схематично изображено средство управления робота и его связи с описанными выше компонентами. Средство управления в виде контроллера 200 включает в себя соответствующую управляющую схему и функциональность обработки, чтобы обрабатывать сигналы, полученные от различных своих датчиков и соответствующим образом управлять роботом 2. Контроллер 200 связан с комплектом 82 датчиков робота 2, посредством которых робот собирает информацию о своем ближайшем окружении, чтобы построить карту окружающей обстановки и спланировать оптимальный маршрут уборки. Для контроллера выполнен модуль 201 памяти, чтобы он мог реализовывать свою функциональность обработки, при этом должно быть понятно, что модуль 201 памяти, как вариант, может быть интегрирован в контроллер 200, вместо того, чтобы представлять собой отдельный компонент, как здесь показано.
Контроллер 200 также имеет подходящие входы от пользовательского интерфейса 70, средство 206 определения столкновений и соответствующее средство 208 восприятия вращения, такое как кодовый датчик угла поворота, установленный на тяговых единицах 20. От контроллера 200 к тяговым единицам 20, а также к всасывающему двигателю 210 и двигателю щетки 212, проведены вход питания и управляющий вход.
Наконец, от блока 214 батарей к контроллеру 200 проведен вход питания, и выполнен интерфейс 216 зарядного устройства, посредством которого контроллер 20 может выполнять зарядку блока 214 батарей, если напряжение батарей упадет ниже соответствующего порога.
Без отклонения от концепции изобретения можно внести много изменений. Например, хотя тяговые единицы 20 были описаны как имеющие бесконечный прорезиненный ремень или гусеницу, изобретение также можно реализовать с гусеницей, которая содержит множество отдельных траков или беговых частей, соединенных друг с другом в виде цепи.
В приведенном выше варианте осуществления корпус 6 был описан как способный перемещаться линейно, а также поворачиваться вокруг шасси. Тем не менее, надо понимать, что так можно определить столкновения под углом из широкого диапазона, и что изобретение также относится к системам определения столкновений, в которых корпус смещается линейно или под углом относительно шасси вместо сочетания такого перемещения.
Было описано, что средство восприятия содержит миниатюрные переключатели, расположенные с обеих сторон клиновидного привода, и что такое расположение удобно позволяет активировать переключатели, когда корпус смещают линейно (одновременно активируют оба переключателя) или под углом (один переключатель активируют раньше другого). Тем не менее, специалист в области техники поймет, что возможны другие механизмы переключателей, например, бесконтактные переключатели, такие как оптический затвор или магнитный переключатель/переключатель на эффекте Холла.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНОЕ УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ПОВЕРХНОСТИ | 2012 |
|
RU2593113C2 |
| АВТОНОМНЫЙ ПЫЛЕСОС | 2012 |
|
RU2586197C2 |
| ПЫЛЕСОС ЦИЛИНДРИЧЕСКОГО ТИПА | 2010 |
|
RU2557743C2 |
| ЧИСТЯЩЕЕ УСТРОЙСТВО | 2010 |
|
RU2531263C2 |
| ЧИСТЯЩЕЕ УСТРОЙСТВО | 2010 |
|
RU2534916C2 |
| НАПОЛЬНЫЙ ИНСТРУМЕНТ ДЛЯ ПЫЛЕСОСА | 2015 |
|
RU2670037C1 |
| ЧИСТЯЩИЙ ПРИБОР (ВАРИАНТЫ) | 2003 |
|
RU2330599C2 |
| БЫТОВОЕ УСТРОЙСТВО | 2005 |
|
RU2380024C2 |
| ЧИСТЯЩАЯ НАСАДКА ДЛЯ ПЫЛЕСОСА | 2014 |
|
RU2625902C1 |
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ ПОВЕРХНОСТИ | 2010 |
|
RU2546464C2 |
Предложено автономное устройство для обработки поверхности пола, содержащее основной корпус, ограничивающий внешний профиль в плане, с приводным устройством, установленным внутри внешнего профиля, и сконфигурированное для движения устройства в направлении перемещения по поверхности, которую необходимо чистить. Устройство содержит блок обработки поверхности, связанный с основным корпусом и расположенный перпендикулярно направлению перемещения. Блок обработки поверхности имеет вытянутую форму и боковые края, проходящие по касательной к соответствующим круглым участкам внешнего профиля в плане основного корпуса, что позволяет осуществлять чистку поверхности пола до стены. 17 з.п. ф-лы, 19 ил.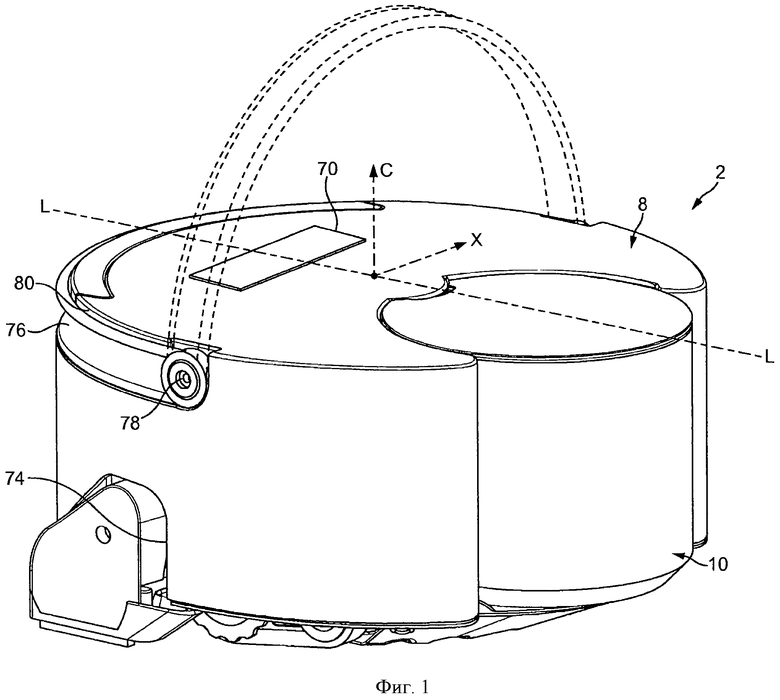
1. Автономное устройство для обработки поверхности пола, содержащее основной корпус, ограничивающий внешний профиль в плане, и имеющее приводное устройство, установленное внутри внешнего профиля в плане основного корпуса, и сконфигурированное так, чтобы двигать устройство в направлении перемещения по поверхности, которую необходимо чистить, блок обработки поверхности, связанный с основным корпусом и расположенный перпендикулярно направлению перемещения, причем блок обработки поверхности, в целом, имеет вытянутую форму и боковые края, проходящие по существу по касательной к соответствующим круглым участкам внешнего профиля в плане основного корпуса.
2. Устройство обработки поверхности по п. 1, в котором внешний профиль в плане основного корпуса по существу круглый.
3. Устройство обработки поверхности по п. 1, в котором блок обработки поверхности проходит поперек через задний участок основного корпуса.
4. Устройство обработки поверхности по п. 1, в котором боковые края блока обработки поверхности проходят через соответствующие отверстия в боковой стенке основного корпуса.
5. Устройство обработки поверхности по п. 1, в котором блок обработки поверхности расположен позади приводного устройства.
6. Устройство обработки поверхности по п. 1, в котором основной корпус включает в себя шасси, при этом блок обработки поверхности установлен на шасси.
7. Устройство обработки поверхности по п. 6, в котором блок обработки поверхности выполнен как единое целое с шасси.
8. Устройство обработки поверхности по п. 6, в котором шасси ограничивает вытянутую опорную пластину, проходящую впереди блока обработки поверхности вдоль продольной оси.
9. Устройство обработки поверхности по п. 6, в котором шасси дополнительно включает в себя первую и вторую боковые выемки, и в котором приводное устройство включает в себя первую и вторую тяговую единицу, каждая из которых входит в соответствующую первую и вторую боковые выемки шасси.
10. Устройство обработки поверхности по п. 1, в котором устройство дополнительно содержит источник энергии, функционально связанный с генератором всасывания, способного затягивать воздух из входа для грязного воздуха блока обработки поверхности в съемное устройство отделения грязи и пыли.
11. Устройство обработки поверхности по п. 10, в котором основной корпус включает в себя передний участок, ограничивающий открытую платформу, в который вставляют съемное отделяющее устройство.
12. Устройство обработки поверхности по п. 10, в котором устройство отделения грязи по существу имеет цилиндрическую форму и задает ось, проходящую по существу параллельно вертикальной оси основного корпуса.
13. Устройство обработки поверхности по п. 10, в котором устройство отделения грязи представляет собой циклонное устройство отделения грязи.
14. Устройство обработки поверхности по п. 10, в котором участок устройства отделения грязи образует часть внешнего профиля в плане устройства.
15. Устройство обработки поверхности по п. 14, в котором участок устройства отделения грязи выступает за пределы переднего участка основного корпуса в направлении перемещения.
16. Устройство обработки поверхности по п. 10, в котором основной корпус включает в себя участок корпуса, установленный на шасси, и способный перемещаться относительно него.
17. Устройство обработки поверхности по п. 16, в котором источник энергии, генератор всасывания и устройство отделения грязи выполнены на участке корпуса.
18. Устройство обработки поверхности по п. 16, в котором изогнутый канал проходит между блоком обработки поверхности, выполненным на шасси, и выходным отверстием, расположенным в открытой платформе участка корпуса, причем выходное отверстие приспособлено для того, чтобы примыкать к соответствующему входному отверстию, выполненному на устройстве отделения грязи и пыли.
| EP 1913856 A1 23.04.2008 | |||
| US 6601265 B1 05.08.2003 | |||
| US 2008276407 A1 13.11.2008 | |||
| US 6553612 B1 29.04.2003 | |||
| US 7827653 B1 09.11.2010. |

