Область техники, к которой относится изобретение
Настоящее изобретение относится к технологиям связи и, в частности, к способу обнаружения канала управления и устройству пользователя.
Уровень техники
В предшествующем уровне техники PDCCH (физический управляющий канал нисходящей линии связи) занимает несколько первых OFDM (мультиплексирование с ортогональным частотным разделением каналов) символов субкадра, например, занимает три OFDM символа. Посредством CRS (общий опорный сигнал) заголовка, удаленный из трех OFDM символов, ресурс, образованный остальными REs (элемент ресурсов), соответствует всему пространству поиска PDCCH. Все пространство поиска использует ССЕ (элемент канала управления) с минимальной гранулярностью, и UE (устройство пользователя) обнаруживает канал управления в определенной области поиска.
При значительном развертывании гетерогенных сетей, в релизе 11, PDCCH сталкивается с необходимостью решать технические задачи, связанные с пропускной способностью, покрытием и координацией процесса снижения влияния помех. Структура E-PDCCH (усовершенствованный физический управляющий канал нисходящей линии связи) изучается и обсуждается в стандарте 3GPP.
Для E-PDCCH, сетевая сторона может конфигурировать К наборы ресурсов канала управления (набор) для каждого UE, где К является положительным целым числом, больше или равным 1, и каждый набор ресурсов канала управления содержит, по меньшей мере, одну физическую пару блоков ресурсов (PRB пара). Например, как показано на фиг. 1, сетевая сторона конфигурирует три набора ресурсов канала управления для UE и каждый набор ресурсов канала управления включает в себя четыре пары PRB (физический блок ресурсов). Например, набор 1 ресурсов канала управления включает в себя одну PRB пары 1, 4, 7 и 10; набор 2 ресурсов канала управления включает в себя PRB пары 2, 5, 8 и 11; набор 3 ресурсов канала управления включает в себя пары PRB 3, 6, 9 и 12; и каждая PRB пара включает в себя четыре еССЕ (усовершенствованный - ССЕ) и, следовательно, как можно видеть, каждый набор ресурсов канала управления включает в себя шестнадцать еССЕ, и еССЕ в каждом наборе ресурсов канала управления пронумерованы независимо.
Однако в предшествующем уровне техники не обеспечивается способ определения пространство поиска E-PDCCH и, следовательно, UE не может выполнить обнаружение канала управления.
Раскрытие изобретения
Варианты осуществления настоящего изобретения обеспечивают способ обнаружения канала управления и пользовательское устройство, так что UE может выполнять обнаружение канала управления в пространстве поиска E-PDCCH.
В соответствии с первым аспектом, обеспечивается способ обнаружения канала управления, включающий в себя этапы, на которых:
определяют с помощью пользовательского устройства пространство поиска канала управления, в соответствии с набором ресурсов канала управления и/или типа канала управления, где набор ресурсов канала управления включает в себя по меньшей мере один физический блок ресурсов; и
выполняют процесс обнаружения канала управления в пространстве поиска.
Согласно второму аспекту обеспечивается способ передачи канала управления, включающий в себя этапы, на которых:
определяют посредством базовой станции пространство поиска канала управления в соответствии с набором ресурсов канала управления и/или тип канала управления, при этом набор ресурсов канала управления включает в себя по меньшей мере один физический блок ресурсов; и
отображают усовершенствованный канал управления на пространство поиска и передают усовершенствованный канал управления.
В соответствии с третьим аспектом, обеспечивается пользовательское устройство, которое включает в себя:
блок определения, выполненный с возможностью определения пространства поиска канала управления в соответствии с набором ресурсов канала управления и/или типом канала управления, при этом набор ресурсов канала управления включает в себя по меньшей мере один физический блок ресурсов; и
блок обнаружения, выполненный с возможностью обнаружения канала управления в пространстве поиска, определенного блоком определения.
В соответствии с четвертым аспектом, обеспечивается базовая станция, которая включает в себя:
модуль определения, выполненный с возможностью определения пространства поиска канала управления в соответствии с набором ресурсов канала управления и/или типом канала управления, при этом набор ресурсов канала управления включает в себя по меньшей мере один физический блок ресурсов; и
передающий модуль, выполненный с возможностью отображения усовершенствованного канала управления на пространство поиска, определенный модулем определения, и передают усовершенствованный канал управления.
В соответствии с шестым аспектом, обеспечивается устройство пользователя, включающее в себя процессор, в котором:
процессор выполнен с возможностью определения пространства поиска канала управления в соответствии с набором ресурсов канала управления и/или типом канала управления, при этом набор ресурсов канала управления включает в себя по меньшей мере один физический блок ресурсов; и выполнения обнаружения канала управления в определенном пространстве поиска.
В соответствии с седьмым аспектом, обеспечивается базовая станция, которая включает в себя трансивер и процессор, при этом:
процессор выполнен с возможностью определения пространства поиска канала управления в соответствии с набором ресурсов канала управления и/или типом канала управления, где набор ресурсов канала управления включает в себя по меньшей мере один физический блок ресурсов; и отображения улучшенного канала управления на определенный пространство поиска; а
трансивер выполнен с возможностью передачи усовершенствованного канала управления.
В вариантах реализации настоящего изобретения UE может определять пространство поиска E-PDCCH в соответствии с набором ресурсов канала управления и/или управления типом канала управления, тем самым реализуя процесс обнаружения канала управления UE. Таким образом, обеспечивается решение для сценария, в котором сконфигурировано множество наборов ресурсов канала управления сетевой стороной для UE.
Краткое описание чертежей
Для более ясного описания технических решений в вариантах осуществления настоящего изобретения, далее приведено краткое описание прилагаемых чертежей, необходимое для описания вариантов осуществления. Очевидно, что сопроводительные чертежи в следующем описании, показывают всего лишь некоторые варианты осуществления настоящего изобретения, и специалисту в данной области техники очевидно, что возможно получить другие чертежи из этих сопроводительных чертежей без творческих усилий.
Фиг. 1 является схемой множества наборов ресурсов канала управления, сконфигурированных сетевой стороной для UE;
фиг. 2 является блок-схемой алгоритма способа обнаружения канала управления в соответствии с вариантом осуществления настоящего изобретения;
фиг. 3 является блок-схемой алгоритма способа для определения пространства поиска в соответствии с вариантом осуществления настоящего изобретения;
фиг. 4а является схемой различных наборов ресурсов канала управления, применяемые к различным субкадрам, в варианте осуществления, показанном на фиг. 3;
фиг. 4b представляет собой схематическое изображение различных способов передачи наборов ресурсов канала управления, выполненный на более высоком уровне в варианте осуществления, показанном на фиг. 3;
фиг. 4с представляет собой схематическое изображение кандидатов канала управления наборов ресурсов канала управления, сконфигурированных на более высоком уровне в варианте осуществления, показанном на фиг. 3;
фиг. 5 представляет собой схематическое изображение первого отношения отображения между второй несущей и наборами ресурсов канала управления на первой несущей в варианте осуществления, показанном на фиг. 3;
фиг. 6 представляет собой схематическое изображение второго отношения отображения между второй несущей и наборами ресурсов канала управления на первой несущей в варианте осуществления, показанном на фиг. 3;
фиг. 7 является блок-схемой алгоритма первого варианта осуществления способа определения начальной точки поиска каналов управления в соответствии с настоящим изобретением;
фиг. 8 является блок-схемой алгоритма второго варианта осуществления способа определения начальной точки поиска канала управления в соответствии с настоящим изобретением;
фиг. 9 является блок-схемой для определения начальной точки поиска канала управления в варианте осуществления, показанном на фиг. 8;
фиг. 10 является еще одним схематическим чертежом, на котором показан процесс определения начальной точки поиска каналов управления;
фиг. 11 является блок-схемой алгоритма третьего варианта осуществления способа определения начальной точки поиска каналов управления в соответствии с настоящим изобретением;
фиг. 12 представляет собой схематическое изображение, показывающее, как множество UEs определяет пространство поиска в различных наборах ресурсов канала управления с использованием того же способа;
фиг. 13 является блок-схемой алгоритма способа передачи канала управления в соответствии с вариантом осуществления настоящего изобретения;
фиг. 14 представляет собой схематичное представление первого варианта осуществления устройства пользователя в соответствии с настоящим изобретением;
фиг. 15 представляет собой схематичное представление блок определения в соответствии с вариантом осуществления настоящего изобретения;
фиг. 16 представляет собой схематичное представление первого варианта осуществления субблока определения начальной точки в соответствии с настоящим изобретением;
фиг. 17 представляет собой схематичное представление второго варианта осуществления субблока определения начальной точки в соответствии с настоящим изобретением;
фиг. 18 представляет собой схематичное представление третьего варианта субблока определения начальной точки в соответствии с настоящим изобретением;
фиг. 19 представляет собой схематичное представление второго варианта осуществления устройства пользователя в соответствии с настоящим изобретением;
фиг. 20 представляет собой схематичное представление первого варианта осуществления базовой станции в соответствии с настоящим изобретением;
фиг. 21 представляет собой схематичное представление модуля определения в соответствии с вариантом осуществления настоящего изобретения;
фиг. 22 представляет собой схематичное представление первого варианта субмодуля определения начальной точки в соответствии с настоящим изобретением;
фиг. 23 представляет собой схематичное представление второго варианта осуществления субмодуля определения начальной точки в соответствии с настоящим изобретением;
фиг. 24 представляет собой схематичное представление третьего варианта субмодуля определения начальной точки в соответствии с настоящим изобретением; и
фиг. 25 представляет собой схематичное представление второго варианта осуществления базовой станции в соответствии с настоящим изобретением.
Осуществление изобретения
Ниже приведено дополнительное подробное описание технических решений настоящего изобретения со ссылкой на прилагаемые чертежи, с целью обеспечения наилучшего объяснения специалистам в данной области техники технических решений в вариантах осуществления настоящего изобретения и предоставить более понятное описание вышеуказанных задач, характеристик и преимуществ настоящего изобретения.
На фиг. 2 представлена блок-схема алгоритма способа обнаружения канала управления в соответствии с вариантом осуществления настоящего изобретения.
Способ может включать в себя следующие этапы:
Этап 201: UE определяет пространство поиска канала управления в соответствии с набором ресурсов канала управления и/или типа канала управления.
UE может определить пространство поиска канала управления в соответствии с набором ресурсов канала управления или типа канала управления или, как в соответствии с набором ресурсов канала управления и типом канала управления. Набор ресурсов канала управления включает в себя, по меньшей мере, один физический блок ресурсов.
Этап 202: Выполнение процесса обнаружения канала управления в пространстве поиска.
В варианте осуществления настоящего изобретения, UE может определять пространство поиска E-PDCCH путем определения канала управления в соответствии с набором ресурсов канала управления и/или типом канала управления, тем самым реализуя процесс обнаружения канала управления UE. Таким образом, предусмотрено решение для сценария, в котором множество наборов ресурсов канала управления сконфигурировано сетевой стороной для UE.
В варианте осуществления настоящего изобретения, если гранулярность пространства поиска канала управления, определенного UE на этапе 201, является пространство поиска в пределах набора ресурсов канала управления, этапы, показанные на фиг. 3, применимы к процессу определения пространства поиска, независимо от того, определяет ли UE пространство поиска канала управления в соответствии с набором ресурсов канала управления или типом канала управления, или в соответствии как с набором ресурсов канала управления, так и типом канала управления.
Фиг. 3 является блок-схемой алгоритма способа для определения пространства поиска в соответствии с вариантом осуществления настоящего изобретения.
Способ определения пространства поиска может включать в себя следующие этапы:
Этап 301: Определение набора канала управления, который включает в себя пространство поиска канала управления.
В одном из вариантов осуществления настоящего изобретения, UE может определять набор ресурсов канала управления, который включает в себя пространство поиска канала управления в соответствии с функцией взаимоотношений между набором ресурсов канала управления и временем. То есть набор ресурсов канала управления, который включает в себя пространство поиска канала управления, изменяется в зависимости от времени. Разные слоты (слот) могут использовать различные наборы ресурсов канала управления или различные субкадры использовать различные наборы ресурсов канала управления. Как показано на фиг. 4а, в субкадре 0 набор ресурсов канала управления, который включает в себя пространство поиска канала управления, равен 0; в субкадре 1 набор ресурсов канала управления, который включает в себя пространство поиска канала управления, установлен на 1; в субкадре 2 набор ресурсов канала управления, который включает в себя пространство поиска канала управления, установлен на 2; и в субкадре 3 набор ресурсов канала управления, который включает в себя пространство поиска канала управления, установлен на 3.
Набор ресурсов канала управления, который включает в себя пространство поиска канала управления UE, может быть функцией времени, где время может быть слотом или субкадром или заранее установленным значением. В частности, набор ресурсов канала управления, который включает в себя пространство поиска канала управления, может быть определен с использованием несущей и/или RNTI (временный идентификатор радиосети) и/или номера субкадра. Например, в N наборах ресурсов канала управления, сконфигурированных на более высоком уровне, может быть определено, в зависимости от количества субкадров, что наборы ресурсов канала управления, которые включают в себя пространство поиска канала управления текущего субкадра, являются М наборами ресурсов канала управления среди наборов ресурсов канала управления, сконфигурированные на более высоком уровне, где N представляет собой положительное целое число, большее или равное 1, М представляет собой положительное целое число, большее или равное 1 и меньше или равно N, и М наборы ресурсов канала управления в различных субкадрах могут быть одинаковыми или разными.
Как показано на фиг. 4b, набор 0 и набор 1 являются наборами ресурсов канала управления, сконфигурированные на более высоком уровне. В пределах субкадра 0, набор 0 представляет собой централизованный набор передач и набор 1 является дискретным набором передач и, следовательно, в следующем субкадре, а именно в субкадре 1, набор 0 является дискретным набором передач и набор 1 представляет собой централизованный набор передач.
В другом варианте осуществления настоящего изобретения, в случае с множеством несущих, то есть когда устройство пользователя выполнено с возможностью планировать данные множества вторых несущих на первой несущей, определять набор канала управления, который включает в себя пространство поиска канала управления, может быть также: определять в соответствии с отображения отношений между второй несущей и набором ресурсов канала управления, набор ресурсов канала управления, существующий на первой несущей, и соответствующий каналу управления второй несущей.
Отображение отношений между второй несущей и набором ресурсов канала управления может быть следующим:
набор ресурсов канала управления второй несущей является функцией индексным номером второй несущей; или
расположение набора ресурсов канала управления на первой несущей является таким же, как местоположение набора ресурсов канала управления на второй несущей.
Таким образом, набор ресурсов канала управления второй несущей, являясь функцией индексного номера второй несущей, в частности, может быть: как показано на фиг. 5, Р вторыми несущими запланированными на первой несущей СС, 0, и на первой несущей СС 0, набор ресурсов канала управления каналов управления Р вторых несущих является функцией индексного номера Р вторых несущих.
Например, четыре набора ресурсов канала управления, а именно набор 0, набор 1, набор 2 и набор 3, сконфигурированы на первой несущей 0. При практической передаче, PRB пары в каждом наборе ресурсов канала управления могут быть прерывистыми и дискретными. Для простоты иллюстрации, PRB пары в каждом наборе ресурсов канала управления, показанные на фиг. 5, являются непрерывными. Если предположить, что nCI является порядковым номером индекса каждой второй несущей, набор ресурсов канала управления каналов управления Р вторых несущих в пределах пространства поиска на первой несущей СС 0 является функцией nCI. Как показано на фиг. 5, в соответствии с функцией связи, где порядковый номер индекса второй несущей СС 1 соответствует набору 3 и набору 0, порядковый номер индекса второй несущей СС 2 соответствует набору 2 и набору 3, порядковый номер индекса второй несущей СС 3 соответствует набору 1 и набору 2, и порядковый номер индекса второй несущей СС 4 соответствует набору 0 и набору 1. Таким образом, соответственно, канал управления второй несущей СС 1 обнаружен в наборе 3 и наборе 0 на первый несущей СС 0, канал управления второй несущей СС 2 обнаружен в наборе 2 и наборе 3 на первой несущей СС 0, канал управления второй несущей СС 3 обнаружен в наборе 1 и наборе 2 на первой несущей СС 0 и канал управления второй несущей СС 4 обнаружен в наборе 0 и наборе 1 на первой несущей СС 0.
Так как расположение набора ресурсов канала управления на первой несущей является таким же, как и местоположение набора ресурса канала управления на второй несущей, то в частности возможно: как показано на фиг. 6, если набор 1 сконфигурирован на второй несущей СС 1, набор 2 сконфигурирован на второй несущей СС 2, и набор 3 сконфигурирован на второй несущей СС 3, когда канал управления второй несущей СС 1 обнаружен на первой несущей СС 0, то выполняется процесс обнаружения в месте нахождения на первой несущей СС 0 и соответствует набору 1, сконфигурированному на второй несущей СС 1; когда канал управления второй несущей СС 2 обнаружен на первой несущей СС 0, выполняется определение на месте нахождения на первой несущей СС 0 и соответствующий набору 2, сконфигурированному на второй несущей СС 2; и, когда канал управления второй несущей СС 3 обнаружен на первой несущей СС 0, то выполняется определение в месте нахождения на первой несущей СС 0 и соответствующий набору 3, сконфигурированному на второй несущей СС 3.
Этап 302: Определение количества кандидатов канала управления пространства поиска канала управления в каждом наборе каналов управления.
Определение количества кандидатов каналов управления, специально может включать в себя: определение количества кандидатов каналов управления пространства поиска канала управления в каждом наборе каналов управления в соответствии с ID несущей (индекс несущей или идентификатор) и/или временным идентификатором радиосети и/или номер субкадра.
Например, как показано на фиг. 4с, набор 0 и набор 1 являются наборами ресурсов канала управления, выполненные на более высоком уровне. В субкадре 0, число кандидатов канала управления, сконфигурированного в наборе 0, равно М, и количество кандидатов каналов управления, сконфигурированных в наборе 1, равно Н, и, следовательно, в следующем субкадре, а именно в субкадре 1, количество кандидатов канала управления, сконфигурированного в наборе 0, равно Н, и число кандидатов каналов управления, сконфигурированных в наборе 1, равно М; или, в пределах следующего субкадра, а именно субкадра 1, количество кандидатов канала управления, сконфигурированного в наборе 0, является X, и число кандидатов каналов управления, сконфигурированные в наборе 1, равно Y, где X не равно N и Y не равно М.
Этап 303: Определение начальной точки поиска каналов управления.
В одном варианте осуществления процесс определения начальной точки поиска каналов управления может дополнительно включать в себя этапы, показанные на фиг. 7. На фиг. 7 показана блок-схема алгоритма первого варианта осуществления способа для определения начальной точки поиска каналов управления в соответствии с настоящим изобретением.
Этап 701: Определение начального значения рекурсивной функции для генерирования начальной точки поиска каналов управления.
Начальное значение начальной точки поиска может быть идентификатором, который может идентифицировать UE, например, RNTI выделенный базовой станцией для UE, обозначенный как nRNTI. Начальное значение начальной точки поиска обозначается Y-1, и поэтому:
Y-1=nRNTI,
Однако начальное значение может иметь также другое значение и не ограничивается nRNTI.
Этап 702: Определение начальной точки поиска в соответствии с начальным значением рекурсивной функции начальной точки поиска и рекурсивной функции.
После того как получено начальное значение начальной точки поиска, начальная точка поиска UE в каждом наборе ресурсов канала управления может быть определена в соответствии с начальным значением и рекурсивной функцией, такой как HARSH функцией.
Например, Yk=(А*Yk-1)mod D, где Yk является начальной точкой поиска UE в наборе ресурсов канала управления и А и D являются константами.
Способ определения начальной точки поиска каналов управления может также быть реализован другими способами.
В другом варианте осуществления настоящего изобретения, процесс определения начальной точки поиска каналов управления может также быть реализован в соответствии с вариантом осуществления, показанным на фиг. 8.
Фиг. 8 представляет собой блок-схему алгоритма второго варианта осуществления способа для определения начальной точки поиска каналов управления в соответствии с настоящим изобретением.
Способ может включать в себя следующие этапы:
Этап 801: определение начального значения поиска начальной точки каждого набора ресурсов канала управления в первом субкадре.
Как показано на фиг. 9, во-первых, начальное значение начальной точки поиска каждого набора ресурсов канала управления в первом субкадре должен быть определен. Для простоты описания, наборы каналов управления ресурсами в каждом субкадре пронумерованы. Например, субкадр 0 включает в себя два набора ресурсов канала управления, таким образом, наборы ресурсов канала управления пронумерованы, как набор 0 и набор 1; и субкадр 1 также включает в себя два набора ресурсов канала управления, так что наборы ресурсов канала управления также пронумерованы как набор 0 и набор 1 и так далее.
Таким образом, на этом этапе начальное значение начальной точки поиска набора 0 и набора 1 в субкадре 0 должно быть определено в первую очередь.
Этап 802: Получение начальной точки поиска каналов управления в первом наборе ресурсов канала управления с помощью рекурсивной функции в соответствии с начальной точкой поиска каналов управления во втором наборе ресурсов канала управления.
Субкадр, который включает в себя второй набор ресурсов канала управления, является субкадром, предыдущим к субкадру, который включает в себя первый набор ресурсов канала управления, и первый набор ресурсов канала управления и второй набор ресурсов канала управления находятся на том же месте в их соответствующих субкадрах.
В схеме, показанной на фиг. 9, субкадр 0 является предшествующим к субкадру 1, и, следовательно, начальная точка поиска каналов управления в наборе 0 в субкадре 1 получают с помощью рекурсивной функции в соответствии с начальной точкой поиска каналов управления в наборе 0 в субкадре 0, и начальная точка поиска каналов управления в наборе 1 в субкадре 1 получается с помощью рекурсивной функции в соответствии с начальной точкой поиска каналов управления в наборе 1 в субкадре 0. Субкадр 2 является предшествующим к субкадру 1 и, следовательно, начальная точка поиска каналов управления в наборе 0 в субкадре 2 получают с помощью рекурсивной функции в соответствии с начальной точкой поиска каналов управления в наборе 0 в субкадре 1, и начальная точка поиска каналов управления в наборе 1 в субкадре 2 получают с помощью рекурсивной функции в соответствии с начальной точкой поиска каналов управления в наборе 1 в субкадре 1 и так далее.
В другом варианте осуществления начальное значение начальной точки поиска указанного набора ресурсов канала управления в первом субкадре, может быть определено в первую очередь.
Как показано на фиг. 10, во-первых, начальное значение начальной точки поиска первого набора ресурсов канала управления в первом субкадре должен быть определен. Для простоты описания, наборы ресурсов каналов управления в каждом субкадре пронумерованы. Например, субкадр 0 состоит из двух наборов ресурсов канала управления, так что наборы ресурсов канала управления пронумерованы, как набор 0 и набор 1; и субкадр 1 также включает в себя два набора ресурсов канала управления, так что наборы ресурсов канала управления также пронумерованы как набор 0 и набор 1 и так далее.
Таким образом, начальное значение начальной точки поиска первого набора ресурсов канала управления (набор 0) в субкадре 0 должно быть определено в первую очередь.
Затем в наборах ресурсов каналов управления в субкадре получается начальная точка поиска в одной части наборов ресурсов канала управления с помощью рекурсивной функции в соответствии с начальной точкой поиска в других наборах ресурсов канала управления в субкадре, что включает в себя данную часть, и начальная точка поиска в другой части наборов ресурсов канала управления получают с помощью рекурсивной функции в соответствии с начальной точкой поиска в наборе(ах) ресурсов канала управления (один набор или множество наборов) в субкадре, который предшествует субкадру, который включает в себя другую часть.
В частности, начальная точка поиска каналов управления в третьем наборе ресурсов канала управления может быть получена с помощью рекурсивной функции в соответствии с начальной точкой поиска каналов управления в четвертом втором наборе ресурсов канала управления.
Третий набор ресурсов канала управления и четвертый набор ресурсов канала управления расположены в том же субкадре и, в том же субкадре порядок расположения четвертого набора ресурсов канала управления является предыдущим и примыкает к третьему набору ресурсов канала управления; или, четвертый набор ресурсов канала управления в субкадре является предыдущим к субкадру, который включает в себя третий набор ресурсов канала управления, четвертый набор ресурсов канала управления последним набором в субкадре, который включает в себя четвертый набор ресурсов канала управления, и третий набор ресурсов канала управления является первым набором в субкадре, который включает в себя третий набор ресурсов канала управления.
Как показано на фиг. 10, в том же субкадре 0, начальную точку поиска каналов управления в наборе 1 получают с помощью рекурсивной функции в соответствии с начальной точкой поиска каналов управления в наборе 0; в том же субкадре 1 начальную точку поиска каналов управления в наборе 1 получают с помощью рекурсивной функции в соответствии с начальной точкой поиска каналов управления в наборе 0 и так далее; и в соседних субкадрах начальную точку поиска каналов управления в наборе 0 в субкадре 1 получают с помощью рекурсивной функции в соответствии с начальной точкой поиска каналов управления в наборе 1 в субкадре 0, и начальную точку поиска канала управления в наборе 0 в субкадре 2 получают с помощью рекурсивной функции в соответствии с начальной точкой поиска каналов управления в наборе 1 в субкадре 1.
В другом варианте осуществления настоящего изобретения, в случае с множеством несущих, то есть когда устройство пользователя выполнено с возможностью осуществлять планирование множества вторых несущих на первой несущей, процесс определения начальной точки поиска каналов управления может также осуществляется в соответствии с вариантом осуществления, показанным на фиг. 11.
Фиг. 11 является блок-схемой алгоритма третьего варианта осуществления способа для определения начальной точки поиска каналов управления в соответствии с настоящим изобретением.
Способ может включать в себя следующие этапы:
Этап 1101: Определение наборов ресурсов канала управления, сконфигурированных на первой несущей.
UE планирует Р вторые несущие на первой несущей СС 0 и наборы ресурсов каналов управления Р вторых несущих сконфигурированы на первой несущей СС 0. Поэтому, во-первых, UE определяет все наборы ресурсов канала управления на первой несущей СС 0.
Этап 1102: в пространстве, образованном всеми наборами ресурсов канала управления на первой несущей, определяется начальная точка поиска каналов управления множества вторых несущих.
После того как все наборы ресурсов канала управления на второй несущей СС 0 определяются, начальная точка поиска каналов управления множества вторых несущих может быть определена следующим образом.
Пространство поиска каналов управления nCI несущей, который передается kth субкадра несущей СС 0 и имеет уровень L агрегации:
 , где
, где
m′=m+M(L)-ƒ(nCI),
 и
и  является количеством наборов ресурсов канала управления, сконфигурированных для каналов управления nCI несущей (одна вторая несущая), когда каналы управления передаются на первой несущей СС 0, или является общим количеством наборов каналов управления, сконфигурированные на первой несущей СС 0, и NCCE,k,j является количеством eCCEs в jth наборе ресурсов канала управления в kth субкадре.
является количеством наборов ресурсов канала управления, сконфигурированных для каналов управления nCI несущей (одна вторая несущая), когда каналы управления передаются на первой несущей СС 0, или является общим количеством наборов каналов управления, сконфигурированные на первой несущей СС 0, и NCCE,k,j является количеством eCCEs в jth наборе ресурсов канала управления в kth субкадре.
Приведенное выше выражение относится к: в пределах пространства, сформированного всеми наборами ресурсов канала управления на второй несущей, определению местоположения начальной точки поиска каналов управления каждой второй несущей. Кроме того, если сконфигурировано так, что на первой несущей СС 0 пространство поиска каналов управления каждой второй несущей является  наборами ресурсов канала управления, и если количество кандидатов канала управления в каждом наборе ресурсов канала сконфигурировано, то начальная точка пространства поиска каждой второй несущей на первой несущей определяется в соответствии с количеством eCCEs во всех наборах ресурсов канала управления первой несущей, или количеством (е) CCEs во всех наборах, соответствующих только второй несущей, и в соответствии с nRNTIi. Например, первая несущая СС 0 имеет четыре набора ресурсов канала управления, а именно набор 0, набор 1, набор 2 и набор 3, каждый набор ресурсов канала управления включает в себя 16 eCCEs и каналы управления второй несущей СС 1 передаются на первой несущей СС 0. Таким образом, в пределах 64 eCCEs, начальная точка поиска при уровне 1 агрегации, определяется как 18 в соответствии с приведенной выше формулой. Кроме того, осуществляется поиск сконфигурированных двух наборов ресурсов канала управления второй несущей СС 1 на первой несущей СС 0, число кандидатов канала управления в первом наборе ресурсов канала управления равно 4, и количество кандидатов каналов управления во втором наборе ресурсов канала управления равно 2. Таким образом, 18 соответствует набору 1, поиск каналов управления второй несущей СС 1 начинается с набора 1, слепое обнаружение выполняется в наборе 1 четыре раза, и слепое обнаружение выполняется в наборе 2 дважды.
наборами ресурсов канала управления, и если количество кандидатов канала управления в каждом наборе ресурсов канала сконфигурировано, то начальная точка пространства поиска каждой второй несущей на первой несущей определяется в соответствии с количеством eCCEs во всех наборах ресурсов канала управления первой несущей, или количеством (е) CCEs во всех наборах, соответствующих только второй несущей, и в соответствии с nRNTIi. Например, первая несущая СС 0 имеет четыре набора ресурсов канала управления, а именно набор 0, набор 1, набор 2 и набор 3, каждый набор ресурсов канала управления включает в себя 16 eCCEs и каналы управления второй несущей СС 1 передаются на первой несущей СС 0. Таким образом, в пределах 64 eCCEs, начальная точка поиска при уровне 1 агрегации, определяется как 18 в соответствии с приведенной выше формулой. Кроме того, осуществляется поиск сконфигурированных двух наборов ресурсов канала управления второй несущей СС 1 на первой несущей СС 0, число кандидатов канала управления в первом наборе ресурсов канала управления равно 4, и количество кандидатов каналов управления во втором наборе ресурсов канала управления равно 2. Таким образом, 18 соответствует набору 1, поиск каналов управления второй несущей СС 1 начинается с набора 1, слепое обнаружение выполняется в наборе 1 четыре раза, и слепое обнаружение выполняется в наборе 2 дважды.
Этап 304: определение пространства поиска в соответствии с отношением между начальной точкой поиска, уровнем агрегации каналов управления и количества кандидатов каналов управления на уровне агрегации, где отношения могут быть выражением отношения.
Уровень агрегации относится к минимальной гранулярности каналов управления, где минимальная гранулярность может быть еССЕ. Каналы управления могут быть переданы на L eCCEs, где значение L может быть 1, 2, 4, 8, 16 или 32.
Определение пространства поиска в соответствии с отношением между начальной точкой поиска, уровнем агрегации каналов управления и количеством кандидатов канала управления на уровне агрегации может быть, в частности:
определением пространства поиска в соответствии с выражением отношения между начальной точкой поиска, уровнем агрегации каналов управления и количеством кандидатов канала управления в соответствии с уровнем агрегации.
Выражение отношения для определения пространства поиска может быть:
Пространство SL k поиска, соответствующий уровню L агрегирования, который является:

где m′=m+ML·nCI и m=0, … M(L)-1. М(L) является количеством кандидатов каналов управления в соответствии с уровнем L агрегации, и nCI является параметром, относящимся к индексу агрегации несущей с множеством несущих. NCCE,k является общим количеством eCCEs в пространстве поиска в момент к времени, где i=0, … L-1.
В вышеизложенном варианте, в отношении того как UE определяет пространство поиска канала управления в соответствии с набором ресурсов канала управления, каждое UE может определить пространство поиска в каждом наборе ресурсов канала управления в том же порядке. То есть в каждом наборе ресурсов канала управления этапы с 301 по 304 выполняются. Другими словами, в различных наборах ресурсов канала управления начальное значение рекурсивной функции для генерирования начальной точки поиска каналов управления может быть одинаковым; в различных наборах ресурсов канала управления рекурсивная функция для определения начальной точки поиска является той же; и в различных наборах ресурсов канала управления выражение отношения для определения пространства поиска является таким же.
Однако, если множество UEs определяют пространство поиска в различных наборах ресурсов канала управления с использованием того же способа, может возникнуть конфликт. Например, как показано на фиг. 12, если количество кандидатов UE 2 и UE 3 каналов управления при определенном уровне агрегации, такого, как уровень 4 агрегации в наборе 1, равно 1, и количество в наборе 2 также равно 1, когда UE 2 и UE 3 получают ту же начальную точку поиска, как еССЕ 0, как показано на фиг. 12, с помощью вышеописанного способа генерирования начальной точки поиска, так как еССЕ 0, еССЕ 1, еССЕ 2 и еССЕ 3 заняты другими пользователями, кандидаты UE 2 и UE 3 канала управления при уровне 4 агрегации блокируются, и не могут быть переданы в наборе 1, и все еще могут быть переданы в наборе 2. Если UE 2 и UE 3 используют тот же способ генерирования начальной точки поиска, что и в наборе 1, например, то начальная точка поиска в наборе 2 равна еССЕ 0, канал управления любого из двух UE может быть установлен на еССЕ 0, eCCE 1, еССЕ 2 и еССЕ 3 в наборе 2. Например, канал управления UE 2 на фиг. 12 помещают в набор 2 для передачи. Тем не менее, из-за того, что UE 3 и UE 2 имеют одинаковую начальную точку поиска, и есть только один кандидат канала управления, то кандидат канала управления может быть установлен только на еССЕ 0, eCCE 1, еССЕ 2 и еССЕ 3 для передачи. Так как они были заняты UE 2, канал управления UE 3 все еще не может быть передан. Следовательно, даже если пространство поиска набора 2 имеет неиспользуемые ресурсы, то ресурсы по-прежнему недоступны для канала управления UE 3.
Таким образом, когда UE определяет пространство поиска канала управления в соответствии с набором ресурсов канала управления, способ определения пространства поиска в различных наборах ресурсов канала управления может отличаться. В частности, следующий способ может быть применен:
1) В одном из вариантов осуществления настоящего изобретения, в различных наборах ресурсов канала управления, начальные значения рекурсивных функций для генерирования начальной точки поиска каналов управления различны. В частности, начальное значение может включать в себя первый характеристический параметр и другой набор ресурсов канала управления соответствует другому первому характеристическому параметру.
В частности, первый характеристический параметр С (J) может быть одним из следующих:
индекс первой PRB пары среди PRB пар в наборе ресурсов управления канала; параметр, полученный на основе динамичной сигнализации или сигнализации более высокого уровня; индекс каждого набора ресурсов канала управления после всех наборов ресурсов канала управления нумеруется; параметр, относящийся к CSI-RS (опорный сигнал-информация о состоянии канала) конфигурации; и значение смещения по отношению к указанному набору ресурсов канала управления.
Начальное значение начальной точки Y поиска каналов управления в каждом наборе ресурсов канала управления (общее количество наборов ресурсов канала управления равно k (с)), может быть, в частности:
Y-1=nRNTI≠0,
Y-1, j=nRNTI+C(j), j=0, 1 … K (с)-1.
Или
Y-1, j=nRNTI*C(j), j=0, 1 … K (c)-1.
Если С(J) представляет собой значение offset (j) смещения по отношению к указанному набору ресурсов канала управления, при условии, что указанный набор ресурсов каналов управления является набором ресурсов канала управления с J=0,
Y-1, 0=nRNRI, j=0, начальная точка поиска другого набора ресурсов канала управления равна
Y-1, j=nRNTI+offset (j), j=1 … K (c)-1.
или
Y-1, j=nRNTI*offset (j), j=1 … K (c)-1
offset (j) представляют собой значение смещения jth набора ресурсов канала управления, относящийся к 0-му набору ресурсов канала управления. Кроме того, значение смещения может быть значением индекса первой PRB пары во всех PRB парах в каждом наборе ресурсов канала управления, по отношению к первой PRB паре в 0-й наборе ресурсов канала управления; или может быть параметром, полученным посредством динамической сигнализации или сигнализации более высокого уровня; или может быть значением смещения индекса каждого набора ресурсов канала управления по отношению к значению индекса конкретного набора ресурсов канала управления, после того как все наборы ресурсов канала управления пронумерованы; или может быть параметром, относящимся к конфигурации CSI-RS.
Кроме того, если набор ресурсов канала управления дополнительно включает в себя различные типы каналов управления, другой тип канала управления также может соответствовать другому первому характерному параметру.
Различные типы канала управления могут быть отнесены к одной из следующих групп:
каналы управления нормального субкадра и каналы управления субкадра мультимедийной широковещательной многоадресной передачи одночастотной сети; полустатически запланированные каналы управления и динамически запланированные каналы управления; каналы управления, обнаруженные в общем пространстве поиска каналов управления и каналы управления, обнаруженные в UE-конкретных пространствах поиска; каналы управления сигнализации планирования восходящей линии связи и каналы управления планирования нисходящей линии связи; каналы управления централизованных передач и каналов управления дискретной передачи; каналы управления разных DCI (информация управления нисходящей линии связи); каналы управления субкадров различных циклических префиксов; каналы управления разных типов конкретных субкадров; каналы управления, переданные в PRB парах с разным количеством доступных REs; каналы управления, переданные элементами (е) CCEs канала управления (усовершенствованный элемент канала управления), которые включают в себя разное число групп элементов ресурсов (е) REG (усовершенствованная группа элементов ресурсов); и каналы управления разных несущих.
Например, когда каждая несущая каналов управления сконфигурирована с К (с) наборами ресурсов канала управления, К (с) наборы ресурсов канала управления включают в себя наборы KD (с) ресурсов канала управления дискретной передачи и KL (с) наборы ресурсов канала управления централизованной передачи, и каждый набор ресурсов канала управления содержит, по меньшей мере, одну PRB пару. Таким образом, в наборах ресурсов канала управления первый характеристический параметр в наборе ресурсов канала управления централизованной передачи отличается от первого характеристического параметра в наборе ресурсов канала управления дискретной передачи.
2) В другом варианте осуществления настоящего изобретения, в различных наборах ресурсов канала управления рекурсивная функция для определения начальной точки поиска различная. В частности, рекурсивная функция может включать в себя второй характеристический параметр, а другой набор ресурсов канала управления соответствует другому второму характеристическому параметру.
В частности, второй характеристический параметр может быть одним из следующих:
индекс первой PRB пары среди PRB пар в наборе ресурсов канала управления; параметр, полученный на основе динамичной сигнализации или сигнализации более высокого уровня; индекс каждого набора ресурсов канала управления после всех наборов ресурсов канала управления нумеруются; параметр, относящийся к конфигурации CSI-RS; и значение смещения по отношению к указанному набору ресурсов канала управления.
Рекурсивная функция для определения начальной точки поиска j-м наборе ресурсов канала управления (общее количество наборов ресурсов канала управления равно k (с)) может быть, в частности:
Yk,j=(AYk-1,j+C′(j))modD, j=0, 1 … K (c)-1,
или
Yk,j=(A(Yk-1,j+C(j)))modD, j=0, 1 … K (c)-1,
или
Yk,j=(AYk-1,j*C′(j))modD, j=0, 1 … K (c)-1,
или
Yk,j=(C′(j)Yk-1,j)modD, j=0, 1 … K (c)-1,
где С′(j) является вторым характеристическим параметром.
Если С′(j) является значением смещения по отношению к указанному набору ресурсов канала управления, при условии, что указанный набор ресурсов канала управления является набором ресурсов канала управления с J=0, рекурсивная функция для определения начальной точки поиска j-й наборе ресурсов канала управления может быть:
Yk,j=(AYk-1,j+offset′(j))modD, j=0, 1 … K (c)-1,
или
Yk,j=(A(Yk-l,j+offset′(j)))modD, j=0, 1 … K (c)-1,
или
Yk,j=(AYk-1,j*offset′(j))modD, j=0, 1 … K (c)-1.
где offset′(j) значение смещения j-го набора ресурсов канала управления по отношению к 0-й набору ресурсов канала управления. Кроме того, значение смещения может быть значением индекса первой PRB пары во всех PRB парах в каждом наборе ресурсов канала управления по отношению к первой PRB паре в 0-й наборе ресурсов канала управления; или может быть параметром, полученном посредством динамической сигнализации или сигнализации более высокого уровня; или может быть значением смещения индекса каждого набора ресурсов канала управления по отношению к значению индекса конкретного набора ресурсов канала управления после того как все наборы ресурсов канала управления пронумерованы; или может быть параметром, относящимся к конфигурации CSI-RS.
Кроме того, если набор ресурсов канала управления дополнительно включает в себя различные типы каналов управления, другой тип канала управления также может соответствовать иному второму характерному параметру.
Различные типы каналов управления могут быть отнесены к одной из следующих групп:
каналы управления нормального субкадра и каналы управления субкадра мультимедийной широковещательной многоадресной передачи одночастотной сети; полустатически запланированные каналы управления и динамически запланированные каналы управления; каналы управления, обнаруженные в общем пространстве поиска каналов управления, и обнаруженные в UE - конкретном пространстве поиска; каналы управления, запланированной сигнализации восходящей линии связи и каналы управления запланированной сигнализации нисходящей линии связи; каналы управления централизованной передачи и каналы управления дискретной передачи; каналы управления различного DCI; каналы управления субкадров различных циклических префиксов; каналы управления разных типов конкретных субкадров; каналы управления, переданные в физических парах (PRB пары) ресурсов с различным количеством доступных элементов ресурса (REs); каналы управления, передаваемые элементами канала управления, которые включают в себя различное число групп элементов ресурса; и каналы управления различных несущих.
Например, когда каждая несущая каналов управления сконфигурирована с К (с) наборами ресурсов канала управления, К (с) наборы ресурсов канала управления включают в себя наборы KD (с) наборы ресурсов канала управления дискретной передачи и KL (с) наборы ресурсов канала управления централизованной передачи, и каждый набор ресурсов канала управления содержит, по меньшей мере, одну PRB пару. Таким образом, в наборах ресурсов канала управления, второй характерный параметр в наборе ресурсов канала управления централизованной передачи отличается от второго характерного параметра в наборе ресурсов канала управления дискретной передачи.
3) В другом варианте осуществления настоящего изобретения, в различных наборах ресурсов канала управления выражение отношения для определения пространства поиска отличается. В частности, выражение отношения для определения пространства поиска может включать в себя третий характерный параметр, и другой набор ресурсов канала управления соответствует другому третьему характерному параметру.
В частности, третий характерный параметр может быть одним из следующих:
индекс первой PRB пары среди PRB пар в наборе ресурсов управления канала; параметр, полученный на основе динамичной сигнализации или сигнализации на более высоком уровне; индекс каждого набора ресурсов канала управления после всех наборов ресурсов каналов управления нумеруется; параметр, относящийся к конфигурации CSI-RS; и значение смещения по отношению к указанному набору ресурсов канала управления.
Пространство поиска j-го набора ресурсов канала управления на уровне агрегации L является
 ,
, 
где C″(j) является третьим характерным параметром, NCCE,k,j является количеством eCCEs в j-ом наборе ресурсов канала управления, и  является количеством кандидатом канала управления на уровне L агрегации в наборе j наборе ресурсов канала управления.
является количеством кандидатом канала управления на уровне L агрегации в наборе j наборе ресурсов канала управления.
Если C″(j) является значением смещения по отношению к указанному набору ресурсов канала управления, при условии, что выбранный набор ресурсов канала управления является набором ресурсов канала управления с j=0, выражение отношения для генерирования пространства поиска может быть:
 ,
,  .
.
offset″(j) представляют собой значение смещения j-го набора ресурсов канала управления по отношению к 0-му набору ресурсов канала управления. Кроме того, значение смещения может быть значением индекса первой PRB пары во всех парах PRB в каждом наборе ресурсов канала управления по отношению к первой паре PRB в 0-ом наборе ресурсов канала управления; или может быть параметром, полученным посредством динамической сигнализации или сигнализацией более высокого уровня; или может быть значением смещения индекса каждого набора ресурса канала управления по отношению к значению индекса конкретного набора ресурсов канала управления после того как все наборы ресурсов канала управления пронумерованы; или может быть параметром, относящийся к конфигурации CSI-RS.
Кроме того, если набор ресурсов канала управления дополнительно включает в себя другие типы каналов управления, другой тип канала управления также может соответствовать другому третьему характерному параметру.
Различные типы канала управления могут быть отнесены к одному из следующих групп:
каналы управления нормального субкадра и каналы управления субкадра мультимедийной широковещательной многоадресной передачи одночастотной сети; полустатически запланированные каналы управления и динамически запланированные каналы управления; каналы управления, обнаруженные в общем пространстве поиска каналов управления, и обнаруженные в UE - конкретном пространстве поиска; каналы управления, запланированной сигнализации восходящей линии связи и каналы управления запланированной сигнализации нисходящей линии связи; каналы управления централизованной передачи и каналы управления дискретной передачи; каналы управления различного DCI; каналы управления субкадров различных циклических префиксов; каналы управления разных типов конкретных субкадров; каналы управления, переданные в физических парах (PRB пары) ресурсов с различным количеством доступных элементов ресурса (REs); каналы управления, передаваемые элементами канала управления, которые включают в себя различное число групп элементов ресурса; и каналы управления различных несущих.
Например, когда каждая несущая каналов управления сконфигурирована с К (с) наборами ресурсов канала управления, К (с) наборы ресурсов канала управления включают в себя наборы KD (с) наборы ресурсов канала управления дискретной передачи и KL (с) наборы ресурсов канала управления централизованной передачи, и каждый набор ресурсов канала управления содержит, по меньшей мере, одну PRB пару. Таким образом, в наборах ресурсов канала управления, второй характерный параметр в наборе ресурсов канала управления централизованной передачи отличается от второго характерного параметра в наборе ресурсов канала управления дискретной передачи.
Для обеспечения применения различных способов определения пространство поиска в разных наборах ресурсов канала управления, могут быть применены 1), 2) и 3) в том же варианте осуществления. Предшествующий вариант осуществления может уменьшить вероятность конфликта канала управления между UEs, и повысить эффективность передачи.
Приведенный выше текст описывает способ определения пространства поиска в различных наборах ресурсов канала управления, когда UE определяет пространство поиска канала управления в соответствии с набором ресурсов канала управления. Когда UE определяет пространство поиска каналов управления в соответствии с типом канала управления, UE может определить пространство поиска канала управления в различных типах канала управления в том же порядке, то есть этапы с 301 по 304 выполняются для всех различных типов каналов управления. Однако, чтобы избежать конфликта, в различных типах каналов управления UE может определить пространство поиска канала управления различными способами, как описано ниже:
1) В одном из вариантов осуществления настоящего изобретения, в различных типах канала управления способ определения набора канала управления, который включает в себя пространство поиска канала управления, является иным.
Процесс определения набора каналов управления, который включает в себя пространство поиска канала управления, может быть, в частности:
в N наборах ресурсов каналов управления, сконфигурированных на более высоком уровне, определение в соответствии с числом субкадров, наборов ресурсов канала управления, которые, соответственно, включают в себя пространство поиска канала управления различных типов канала управления текущего субкадра, наборы ресурсов канала управления, которые, соответственно, включают в себя пространство поиска канала управления различных типов каналов управления в различных субкадрах, могут быть одинаковыми или разными.
Как показано на фиг. 4b, набор 0 и набор 1 являются наборами ресурсов канала управления, сконфигурированные на более высоком уровне. В субкадре 0, набор 0 представляет собой набор централизованной передачи и набор 1 является набором дискретной передачи и, следовательно, в следующем субкадре, а именно в субкадре 1 набор 0 является набором дискретной передачи и набор 1 представляет собой набор централизованной передачи.
2) В другом варианте осуществления настоящего изобретения, в различных типах канала управления, способы определения количества кандидатов каналов управления в каждом наборе каналов управления, который включает в себя пространство поиска канала управления, различны.
По существу, количество кандидатов канала управления пространства поиска канала управления в каждом наборе каналов управления может быть определено в соответствии с ID несущей и/или временного идентификатора радиосети и/или количества субкадров.
Например, как показано на фиг. 4с, набор 0 и набор 1 являются наборами ресурсов канала управления, сконфигурированные на более высоком уровне. В субкадре 0, количество кандидатов канала управления, сконфигурированные в наборе 0, равно М, и количество кандидатов каналов управления, сконфигурированных в наборе 1, является Н и, следовательно, в следующем субкадре, а именно в субкадре 1, количество кандидатов канала управления, сконфигурированных в наборе 0, равно Н, и число кандидатов каналов управления, сконфигурированных в наборе 1, равно М; или, в следующем субкадре, а именно в субкадре 1, количество кандидатов канала управления, сконфигурированных в наборе 0, является X, и число кандидатов каналов управления, сконфигурированных в наборе 1, равно Y, где X не равно N, и Y не равно М.
3) В другом варианте осуществления настоящего изобретения, в различных типах канала управления, начальные значения рекурсивных функций для генерирования начальной точки поиска каналов управления различны. В частности, начальное значение может включать в себя четвертый характерный параметр, и другой тип канала управления соответствует иному четвертому характерному параметру.
Различные типы каналов управления могут быть отнесены к одной из следующих групп:
каналы управления нормального субкадра и каналы управления субкадра мультимедийной широковещательной многоадресной передачи одночастотной сети; полустатически запланированные каналы управления и динамически запланированные каналы управления; каналы управления, обнаруженные в общем пространстве поиска каналов управления, и обнаруженные в UE - конкретном пространстве поиска; каналы управления, запланированной сигнализации восходящей линии связи и каналы управления запланированной сигнализации нисходящей линии связи; каналы управления централизованной передачи и каналы управления дискретной передачи; каналы управления различного DCI; каналы управления субкадров различных циклических префиксов; каналы управления разных типов конкретных субкадров; каналы управления, переданные в физических парах (PRB пары) ресурсов с различным количеством доступных элементов ресурса (REs); каналы управления, передаваемые элементами канала управления, которые включают в себя различное число групп элементов ресурса; и каналы управления различных несущих.
4) В другом варианте осуществления настоящего изобретения, в различных типах канала управления, рекурсивная функция для определения начальной точки поиска отличается. В частности, рекурсивная функция для определения начальной точки поиска может включать в себя пятый характерный параметр, и другой тип канала управления соответствует иному пятому характерному параметру.
Различные типы канала управления могут быть отнесены к одной из следующих групп:
каналы управления нормального субкадра и каналы управления субкадра мультимедийной широковещательной многоадресной передачи одночастотной сети; полустатически запланированные каналы управления и динамически запланированные каналы управления; каналы управления, обнаруженные в общем пространстве поиска каналов управления, и обнаруженные в UE- конкретном пространстве поиска; каналы управления, запланированной сигнализации восходящей линии связи и каналы управления запланированной сигнализации нисходящей линии связи; каналы управления централизованной передачи и каналы управления дискретной передачи; каналы управления различного DCI; каналы управления субкадров различных циклических префиксов; каналы управления разных типов конкретных субкадров; каналы управления, переданные в физических парах (PRB пары) ресурсов с различным количеством доступных элементов ресурса (REs); каналы управления, передаваемые элементами канала управления, которые включают в себя различное число групп элементов ресурса; и каналы управления различных несущих.
5) В другом варианте осуществления настоящего изобретения, в различных типах канала управления, относительное выражение для определения пространства поиска отличается. В частности, выражение отношения для определения пространства поиска может включать в себя шестой характерный параметр, и другой тип канала управления соответствует иному шестому характерному параметру.
Различные типы канала управления могут быть отнесены к одной из следующих групп:
каналы управления нормального субкадра и каналы управления субкадра мультимедийной широковещательной многоадресной передачи одночастотной сети; полустатически запланированные каналы управления и динамически запланированные каналы управления; каналы управления, обнаруженные в общем пространстве поиска каналов управления, и обнаруженные в UE - конкретном пространстве поиска; каналы управления, запланированной сигнализации восходящей линии связи и каналы управления запланированной сигнализации нисходящей линии связи; каналы управления централизованной передачи и каналы управления дискретной передачи; каналы управления различного DCI; каналы управления субкадров различных циклических префиксов; каналы управления разных типов конкретных субкадров; каналы управления, переданные в PRB парах с различным количеством доступных REs; каналы управления, передаваемые элементами (е)ССЕ, которые включают в себя различное число групп (e)REG элементов ресурса; и каналы управления различных несущих.
Изменяемый способ определения пространства поиска в различных типах канала управления, как указано выше с 1) по 5), может быть применен в том же варианте осуществления. Упомянутый вариант осуществления может уменьшить вероятность возникновения конфликта канала управления между UEs и повысить эффективность передачи.
В вышеизложенном варианте осуществления рассматривается сценарий, в котором уровень гранулярности пространства поиска канала управления, определенный устройством пользователем, является пространством поиска в пределах набора ресурсов канала управления. В другом варианте осуществления настоящего изобретения, когда тип канала управления относится к каналам управления различных несущих, пространство поиска канала управления, определяемый UE, являются наборами ресурсов канала управления, то есть гранулярность пространства поиска канала управления, определяемого UE, является наборами ресурсов канала управления. В этом случае, процесс UE определения пространства поиска каналов управления в зависимости от типа канала управления может, в частности, включать в себя:
когда UE выполнено с возможностью планировать передачу на множестве вторых несущих, на первой несущей, определять набор ресурсов канала управления, соответствующего устройству пользователя в соответствии с отображением отношений между второй несущей и набором ресурсов канала управления.
Отображение отношений между второй несущей и набором ресурсов канала управления может быть следующим:
набор ресурсов канала управления второй несущей является функцией индексного номера второй несущей; или
расположение набора ресурсов канала управления на первой несущей является таким же, как местоположение набора ресурсов канала управления на второй несущей.
Отображение отношений между второй несущей и набором ресурсов канала управления здесь аналогично отображению отношений, описанного на этапе 301, между второй несущей и набором ресурсов канала управления. Таким образом, набор ресурсов канала управления второй несущей, являясь функцией индексного номера второй несущей, в частности, может быть: как показано на фиг. 5, Р вторыми несущими запланированными на первой несущей СС 0, и на первой несущей СС 0, набор ресурсов канала управления каналов управления вторых несущих Р является функцией индексного номера вторых несущих Р.
Например, четыре набора ресурсов канала управления, а именно набор 0, набор 1, набор 2 и набор 3, сконфигурированы на первой несущей СС 0. При практической передаче, PRB пары в каждом наборе ресурсов канала управления могут быть прерывистыми и дискретными. Для простоты иллюстрации, PRB пары в каждом наборе ресурсов канала управления, показанные на фиг. 5, являются непрерывными. Если предположить, что nCI является порядковым номером индекса каждой второй несущей, набор ресурсов канала управления каналов управления Р вторых несущих в пределах пространства поиска на первой несущей СС 0 является функцией nCI. Как показано на фиг. 5, в соответствии с функцией связи, где порядковый номер индекса второй несущей СС 1 соответствует набору 3 и набору 0, порядковый номер индекса второй несущей СС 2 соответствует набору 2 и набору 3, порядковый номер индекса второй несущей СС 3 соответствует набору 1 и набору 2, и порядковый номер индекса второй несущей СС 4 соответствует набору 0 и набору 1. Таким образом, соответственно, канал управления второй несущей СС 1 обнаружен в наборе 3 и наборе 0 на первый несущей СС 0, канал управления второй несущей СС 2 обнаружен в наборе 2 и наборе 3 на первой несущей СС 0, канал управления второй несущей СС 3 обнаружен в наборе 1 и наборе 2 на первой несущей СС 0 и канал управления второй несущей СС 4 обнаружен в наборе 0 и наборе 1 на первой несущей СС 0.
Так как расположение набора ресурсов канала управления на первой несущей является таким же, как и местоположение набора ресурса канала управления на второй несущей, то в частности возможно: как показано на фиг. 6, если набор 1 сконфигурирован на второй несущей СС 1, набор 2 сконфигурирован на второй несущей СС 2, и набор 3 сконфигурирован на второй несущей СС 3, когда канал управления второй несущей СС 1 обнаружен на первой несущей СС 0, то выполняется процесс обнаружения в месте нахождения на первой несущей СС 0 и соответствует набору 1, сконфигурированному на второй несущей СС 1; когда канал управления второй несущей СС 2 обнаружен на первой несущей СС 0, выполняется определение на месте нахождения на первой несущей СС 0 и соответствующий набору 2, сконфигурированному на второй несущей СС 2; и, когда канал управления второй несущей СС 3 обнаружен на первой несущей СС 0, то выполняется определение в месте нахождения на первой несущей СС 0 и соответствующий набору 3, сконфигурированному на второй несущей СС 3.
Вышеприведенное описывает вариант осуществления способа обнаружения канала управления на стороне UE. На стороне базовой станции, при этом способ для базовой станции, который конфигурирует каналы управления, состоит в следующем:
Фиг. 13 является блок-схемой последовательности операций способа передачи канала управления в соответствии с вариантом осуществления настоящего изобретения.
Способ может включать в себя следующие этапы:
Этап 1301: базовая станция определяет пространство поиска канала управления в соответствии с набором ресурсов канала управления и/или типа канала управления, где набор ресурсов канала управления включает в себя, по меньшей мере, один физический блок ресурсов.
Этот этап в точности соответствует процессу определения пространства поиска канала управления в соответствии с набором ресурсов канала управления и/или типа канала управления на стороне UE. Для получения дополнительной информации, ссылка может быть сделана к соответствующему описанию процесса на стороне UE и повторное описание не приводится здесь дальше.
Этап 1302: отображение усовершенствованного канала управления на пространство поиска и передача усовершенствованного канала управления.
Вышеприведенное описание представляет собой способ варианта осуществления настоящего изобретения, который обеспечивает устройство осуществления способа.
Фиг. 14 представляет собой схематичное представление первого варианта осуществления устройства пользователя в соответствии с настоящим изобретением.
Устройство 141 пользователя может включать в себя:
блок 1401 определения, выполненный с возможностью определять пространство поиска канала управления в соответствии с набором ресурсов канала управления и/или типа канала управления, где набор ресурсов канала управления включает в себя, по меньшей мере, один физический блок ресурсов; и
блок 1402 обнаружения, выполненный с возможностью выполнять обнаружение канала управления в пространстве поиска, определенного блоком 1401 определения.
В варианте осуществления настоящего изобретения, UE может определить пространство поиска E-PDCCH в соответствии с набором ресурсов канала управления и/или типом канала управления с помощью вышеизложенных блоков, тем самым реализуя процесс обнаружения канала управления для UE. Таким образом, предусмотрено решение для сценария, в котором множество наборов ресурсов канала управления сконфигурировано для UE на сетевой стороне.
Фиг. 15 представляет собой схематичное представление блок определения в соответствии с вариантом осуществления настоящего изобретения.
Блок 151 определения в устройстве пользователя может дополнительно включать в себя:
субблок 1511 определения набора, выполненный с возможностью определять набор каналов управления, который включает в себя пространство поиска канала управления;
субблок 1512 определения количества, выполненный с возможностью определять количество кандидатов каналов управления пространства поиска канала управления в каждом наборе каналов управления;
субблок 1513 определения начальной точки, выполненный с возможностью определять начальную точку поиска каналов управления; и
субблок 1514 определения пространства, выполненный с возможностью определять пространство поиска в соответствии с отношением между начальной точкой поиска, определенной субблоком определения начальной точки, уровнем агрегации каналов управления и количеством кандидатов канала управления на уровне агрегации.
Субблок 1511 определения набора может, в частности, быть выполнен с возможностью: определять набор ресурсов канала управления, который включает в себя пространство поиска канала управления в соответствии с несущей и/или временным идентификатором радиосети, и/или количеством субкадров; и может быть дополнительно выполнен с возможностью: когда устройство пользователя выполнено с возможностью осуществлять планирование множество вторых несущих на первой несущей, определять, в соответствии с отображением отношения между второй несущей и набором ресурсов канала управления, набор ресурсов канала управления, существующий на первой несущей, и соответствующий каналу управления второй несущей.
Субблок 1512 определения количества может, в частности, быть выполнен с возможностью определять количество кандидатов каналов управления пространства поиска канала управления в каждом наборе каналов управления в соответствии с ID индекса несущей и/или временного идентификатора радиосети и/или номера субкадра.
Фиг. 16 представляет собой схематичное представление первого варианта субблока определения начальной точки в соответствии с настоящим изобретением.
Дополнительно, субблок 161 определения начальной точки в блоке определения может, в частности, включать в себя:
первый субблок 1611 установки, выполненный с возможностью определять начальное значение поиска начальной точки каждого набора ресурсов канала управления в первом субкадре; и
первый субблок 1612 вычисления, выполненный с возможностью получения значения начальной точки поиска каналов управления в первом наборе ресурсов канала управления с помощью рекурсивной функции в соответствии с начальной точкой поиска каналов управления во втором наборе ресурсов канала управления, где
субкадр, который включает в себя второй набор ресурсов канала управления, является субкадром, предшествующим субкадру, который включает первый набор ресурсов канала управления, и первый набор ресурсов канала управления и второй набор ресурсов канала управления находятся на том же месте в их соответствующих субкадрах.
В другом варианте осуществления, субблок определения начальной точки может также включать в себя:
второй субблок установки, выполненный с возможностью определять начальное значение начальной точки поиска первого набора ресурсов канала управления в первом субкадре; и
второй субблок вычисления, выполненный с возможностью получать значение начальной точки поиска каналов управления в третьем наборе ресурсов канала управления с помощью рекурсивной функции в соответствии с начальной точкой поиска каналов управления в четвертом наборе ресурсов канала управления, где
третий набор ресурсов канала управления и четвертый набор ресурсов канала управления расположены в том же субкадре и в то же субкадре порядок расположения четвертого набора ресурсов канала управления является предшествующим и примыкает к третьему набору ресурсов канала управления; или четвертый набор ресурсов канала управления находится в субкадре, предшествующем субкадру, который включает в себя третий набор ресурсов канала управления, четвертый набор ресурсов канала управления является последним набором в субкадре, который включает в себя четвертый набор ресурсов канала управления, и третий набор ресурсов канала управления является первым набором в субкадре, что включает в себя третий набор ресурсов канала управления.
Фиг. 17 представляет собой схематичное представление второго варианта осуществления субблока определения начальной точки в соответствии с настоящим изобретением.
Дополнительно, субблок 171 определения начальной точки в блоке определения может, в частности, включать в себя:
первый субблок 1711 определения, выполненный с возможностью: когда осуществляется планирование множества вторых несущих на первой несущей, определять наборы ресурсов канала управления, сконфигурированные на первой несущей; и
второй субблок 1712 определения, выполненный с возможностью: в пределах пространства, образованного всеми наборами канала управления на первой несущей, определять начальную точку поиска каналов управления множества вторых несущих.
Фиг. 18 представляет собой схематичное представление третьего варианта субблока определения начальной точки в соответствии с настоящим изобретением.
Дополнительно, субблок 181 определения начальной точки в блоке определения может, в частности, включать в себя:
субблок 1811 определения начального значения, выполненный с возможностью определения начального значения рекурсивной функции для генерирования начальной точки поиска каналов управления; и
субблок 1812 вычисления значения начальной точки, выполненный с возможностью определять начальную точку поиска в зависимости от исходного значения рекурсивной функции начальной точки поиска и рекурсивной функции.
Фиг. 19 представляет собой схематичное представление второго варианта осуществления устройства пользователя в соответствии с настоящим изобретением.
Устройство 191 пользователя включает в себя процессор 1911:
процессор 1911 выполнен с возможностью определять пространство поиска канала управления в соответствии с набором ресурсов канала управления и/или типом канала управления, где набор ресурсов канала управления включает в себя, по меньшей мере, один физический блок ресурсов; и выполнять обнаружение канала управления в определенном пространстве поиска.
Фиг. 20 представляет собой схематичное представление первого варианта осуществления базовой станции в соответствии с настоящим изобретением.
Базовая станция 200 может включать в себя:
модуль 2001 определения, выполненный с возможностью определять пространство поиска канала управления в соответствии с набором ресурсов канала управления и/или типом канала управления, где набор ресурсов канала управления включает в себя, по меньшей мере, один физический блок ресурсов; и
модуль 2002 передачи, выполненный с возможностью отображать усовершенствованный канал управления на пространство поиска, определенный модулем определения, и передавать усовершенствованный канал управления.
Фиг. 21 представляет собой схематичное представление модуля определения в соответствии с вариантом осуществления настоящего изобретения.
Модуль 211 определения может включать в себя:
субмодуль 2111 определения набора, выполненный с возможностью определять набор канала управления, который включает в себя пространство поиска канала управления;
субмодуль 2112 определения количества, выполненный с возможностью определять количество кандидатов каналов управления пространства поиска канала управления в каждом наборе каналов управления;
субмодуль 2113 определения начальной точки, выполненный с возможностью определять начальную точку поиска каналов управления; и
субмодуль 2114 определения пространства, выполненный с возможностью определять пространство поиска в соответствии с отношением между начальной точкой поиска, определенной субмодулем определения начальной точки, уровнем агрегации каналов управления и количеством кандидатов канала управления на уровне агрегации.
Субмодуль 2111 определения набора может, в частности, быть выполнен с возможностью: определять набор ресурсов канала управления, который включает в себя пространство поиска канала управления в соответствии с несущей и/или временным идентификатором радиосети и/или количества субкадров; и может быть дополнительно выполнен с возможностью: при осуществлении планирования множества вторых несущих на первой несущей, определять в соответствии с отображением отношений между второй несущей и набором ресурсов канала управления, набор ресурсов канала управления, существующий на первой несущей, и соответствующий каналу управления второй несущей.
Субмодуль 2112 определения количества может, в частности, быть выполнен с возможностью определять количество кандидатов каналов управления пространства поиска канала управления в каждом наборе ресурсов канала управления в соответствии с ID несущей и/или временного идентификатора радиосети и/или количества субкадров.
Фиг. 22 представляет собой схематичное представление первого варианта начальной точки, определяющей подмодуль в соответствии с настоящим изобретением.
Дополнительно, субмодуль 221 определения начальной точки в модуле определения может включать в себя:
первый субмодуль 2211 установки, выполненный с возможностью определять начальное значение начальной точки поиска каждого набора ресурсов канала управления в первом субкадре; и
первый субмодуль 2212 вычисления, выполненный с возможностью получать значение начальной точки поиска каналов управления в первом наборе ресурсов канала управления с помощью рекурсивной функции в соответствии с начальной точкой поиска каналов управления во втором наборе ресурсов канала управления, где
субкадр, который включает в себя второй набор ресурсов канала управления, является субкадром, предшествующий субкадру, который включает в себя первый набор ресурсов канала управления, и первый набор ресурсов канала управления и второй набор ресурсов канала управления находятся в одном месте в их соответствующих субкадрах.
В другом варианте осуществления, субмодуль определения начальной точки может также включать в себя:
второй субмодуль установки, выполненный с возможностью определять начальное значение начальной точки поиска первого набора ресурсов канала управления в первом субкадре; и
второй субмодуль вычисления, выполненный с возможностью получать значение начальной точки поиска канала управления в третьем наборе ресурсов канала управления с помощью рекурсивной функции в соответствии с начальной точкой поиска каналов управления в четвертом наборе ресурсов канала управления, где
третий набор ресурсов канала управления и четвертый набор ресурсов канала управления расположены в том же субкадре, и, в том же субкадре, порядок расположения четвертого набора ресурсов канала управления является предшествующим и примыкает к третьему набору ресурсов канала управления; или четвертый набор ресурсов канала управления в субкадре является предшествующим к субкадру, который включает в себя третий набор ресурсов канала управления, четвертый набор ресурсов канала управления является последним набором в субкадре, который включает в себя четвертый набор ресурсов канала управления, и третий набор ресурсов канала управления является первым набором в субкадре, который включает в себя третий набор ресурсов канала управления.
Фиг. 23 представляет собой схематичное представление второго варианта осуществления субмодуля определения начальной точки в соответствии с настоящим изобретением.
Дополнительно, субмодуль 231 определения начальной точки в модуле определения может включать в себя:
первый субмодуль 2311 определения, выполненный с возможностью: если осуществляется планирование множества вторых несущих на первой несущей, определять наборы ресурсов канала управления, сконфигурированные на первой несущей; и
второй субмодуль 2312 определения, выполненный с возможностью: в пределах пространства, образованного всеми наборами ресурсов каналов управления на первой несущей, определять начальную точку поиска каналов управления множества вторых несущих.
Фиг. 24 представляет собой схематичное представление третьего варианта субмодуля определения начальной точки в соответствии с настоящим изобретением.
Дополнительно, субмодуль 241 определения начальной точки в модуле определения может включать в себя:
субмодуль 2411 определения начального значения, выполненный с возможностью определять начальное значение рекурсивной функции для генерирования начальной точки поиска каналов управления; и
субмодуль 2412 вычисления значения начальной точки, выполненный с возможностью определять начальную точку поиска в зависимости от исходного значения рекурсивной функции начальной точки поиска и рекурсивной функции.
Фиг. 25 представляет собой схематичное представление второго варианта осуществления базовой станции в соответствии с настоящим изобретением.
Базовая станция 251 может включать в себя процессор 2511 и трансивер 2512.
Процессор 2511 выполнен с возможностью определять пространство поиска канала управления в соответствии с набором ресурсов канала управления и/или типом канала управления, где набор ресурсов канала управления включает в себя, по меньшей мере, один физический блок ресурсов; и сопоставление усовершенствованного канала управления на определенный пространство поиска.
Трансивер 2512 выполнен с возможностью отправлять усовершенствованный канал управления.
С целью получения дополнительной информации о процессе функционирования блоков и модулей в устройстве может быть сделана ссылка на соответствующее описание варианта осуществления способа, и повторное описание не приводится здесь дальше. Устройство приемопередатчика может быть трансивером.
Специалисту в данной области техники известно, что, со ссылкой на примеры, описанные в вариантах осуществления, раскрытые в данном описании, блоки и алгоритмы осуществления этапов могут быть реализованы с помощью электронных аппаратных средств или комбинации программного обеспечения и аппаратных электронных средств. Если функции выполняются посредством аппаратного или программного обеспечения, то технические решения ограничиваются конкретным применением и конструкцией. Специалист в данной области техники может использовать различные способы для реализации описанных функций для каждого конкретного применения, но это не следует считать, что процесс реализации выходит за рамки настоящего изобретения.
Как понятно специалисту в данной области техники, с целью удобного и краткого подробного описания рабочего процесса функционирования вышеизложенной системы, устройства и блока, может быть сделана ссылка на соответствующий процесс в вышеприведенных вариантах осуществления способа и подробное описание опускается.
В некоторых вариантах осуществления, представленные в настоящей заявке, очевидно, что указанные выше системы, устройство и способ могут быть реализованы другими способами. Например, описанный вариант осуществления устройства приведен только в качестве примера. Например, поблочная структура является всего лишь структурой, которая отражает логическую функцию, и могут быть использованы и другие структуры поблочного разделения при фактической реализации. Например, множество блоков или компонентов могут быть объединены или интегрированы в другую систему, или некоторые признаки могут быть проигнорированы или не выполняется. Кроме того, отображаемые или обсуждаемые взаимные связи или непосредственные соединения могут быть реализованы с помощью некоторых интерфейсов. Косвенные соединения между устройствами или блоками могут быть реализованы в электронных, механических или иных формах.
Блоки, описанные в виде отдельных частей, могут или не могут быть физически разделены, и их части, отображаемые как блоки, могут или не могут быть физическими блоками, могут быть расположены в одном месте или могут быть распределены по множеству сетевых устройств. Часть или все блоки могут быть выбраны в соответствии с реальными потребностями для достижения целей решений вариантов осуществления.
Кроме того, функциональные блоки в вариантах осуществления настоящего изобретения могут быть интегрированы в один блок обработки или каждый из блоков может существовать как физически отдельный блок, или два или более блоков интегрированы в один блок.
Когда функции реализованы в форме блока программного обеспечения и проданы или использованы в качестве независимого продукта, функции могут быть сохранены на считываемом компьютером носителе информации. На основе такого понимания, технические решения настоящего изобретения, по существу, или части в предшествующем уровне техники, или все или часть технических решений могут быть реализованы в виде программного продукта. Компьютерный программный продукт сохраняется на носителе данных, и включает в себя множество инструкций для управления функционированием компьютерного устройства (которое может быть персональным компьютером, сервером или сетевым устройством или тому подобное) или процессором (процессор) для выполнения всех или части этапов способов, описанных в вариантах осуществления настоящего изобретения. Вышеописанный носитель информации включает в себя: любой носитель, способный хранить программный код, такой как USB флэш, съемный жесткий диск, память только для чтения (ROM), память с произвольным доступом (RAM), магнитный диск или оптический диск.
Вышеприведенные описания являются лишь конкретными вариантами осуществления настоящего изобретения и не предназначены для ограничения объема защиты настоящего изобретения. Как очевидно специалисту в данной области техники, что возможны любое изменение или замена в пределах технического объема, раскрытого в настоящем изобретении, которые не должны выходить за объем патентной защиты настоящего изобретения. Поэтому объем защиты настоящего изобретения определяется формулой изобретения.
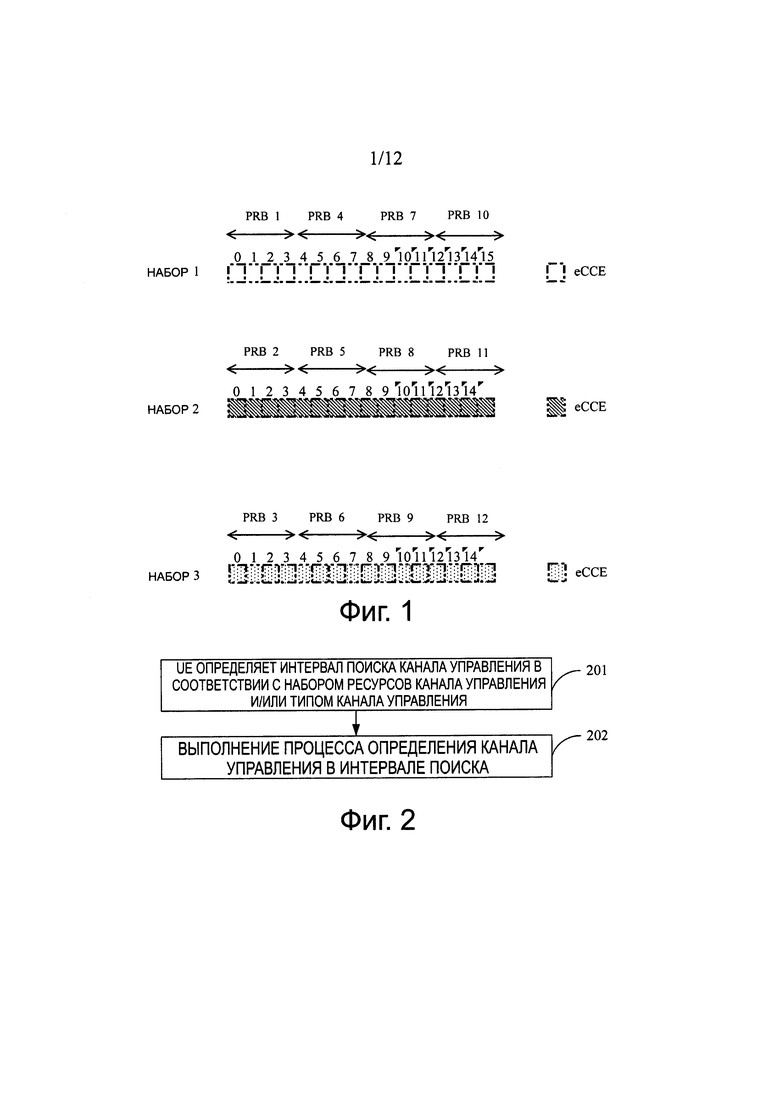
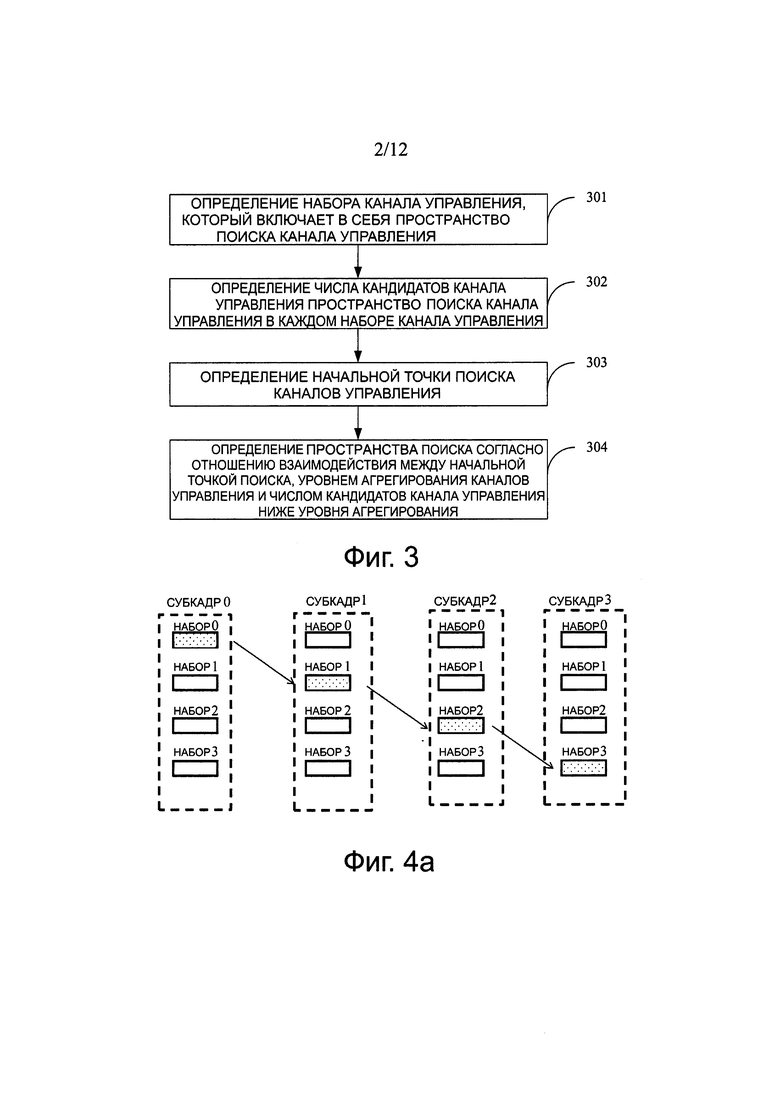
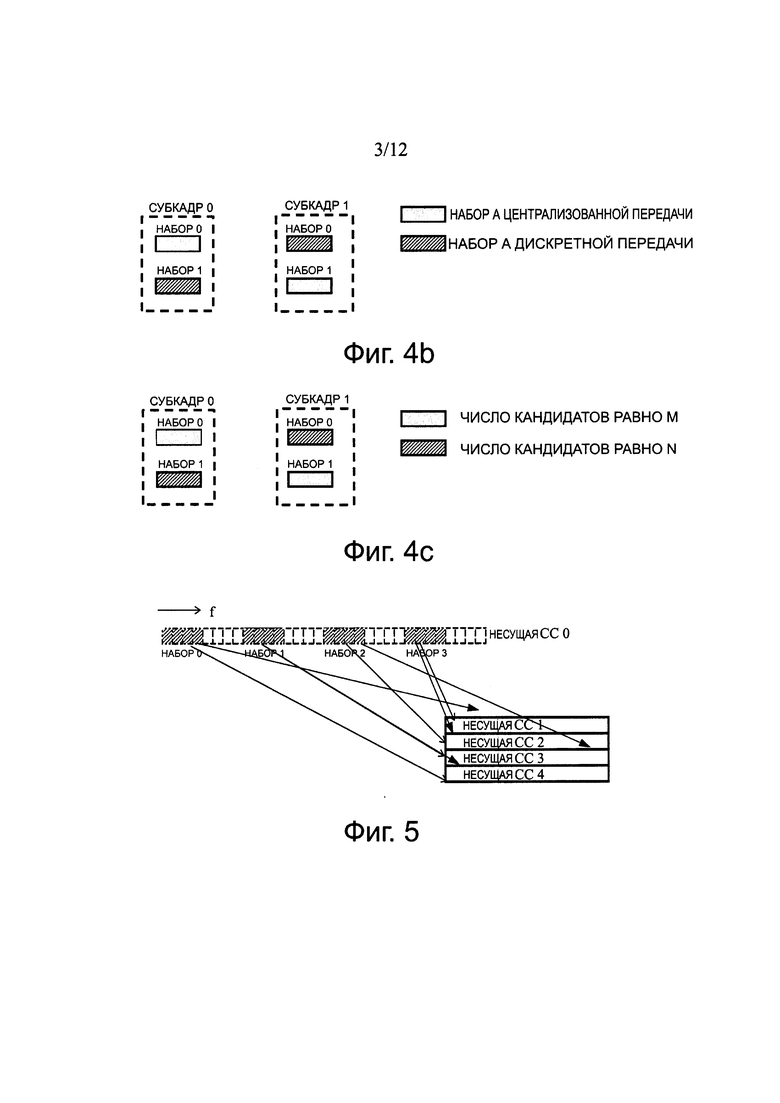
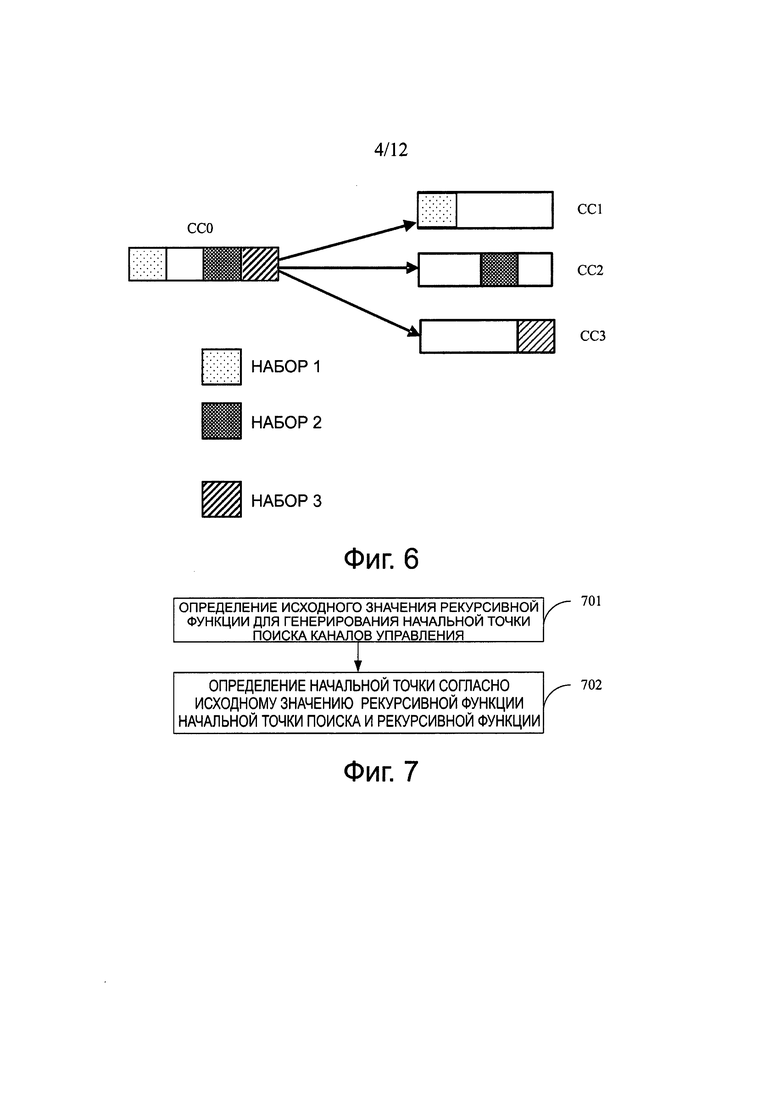
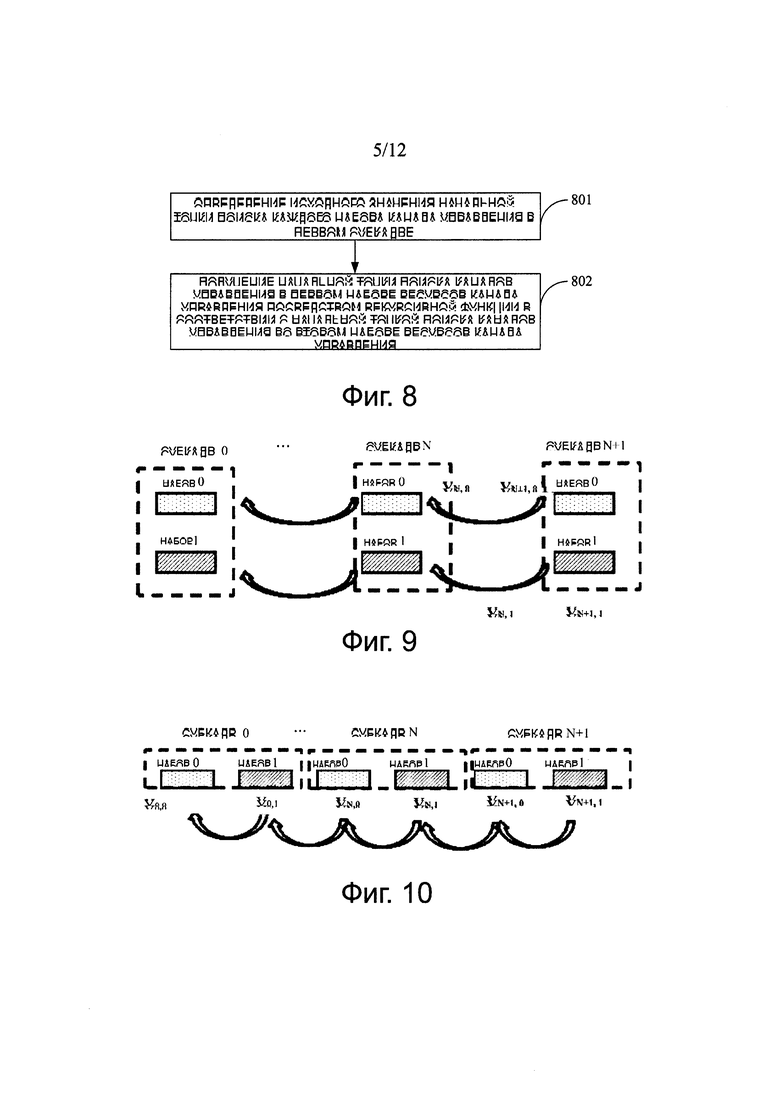
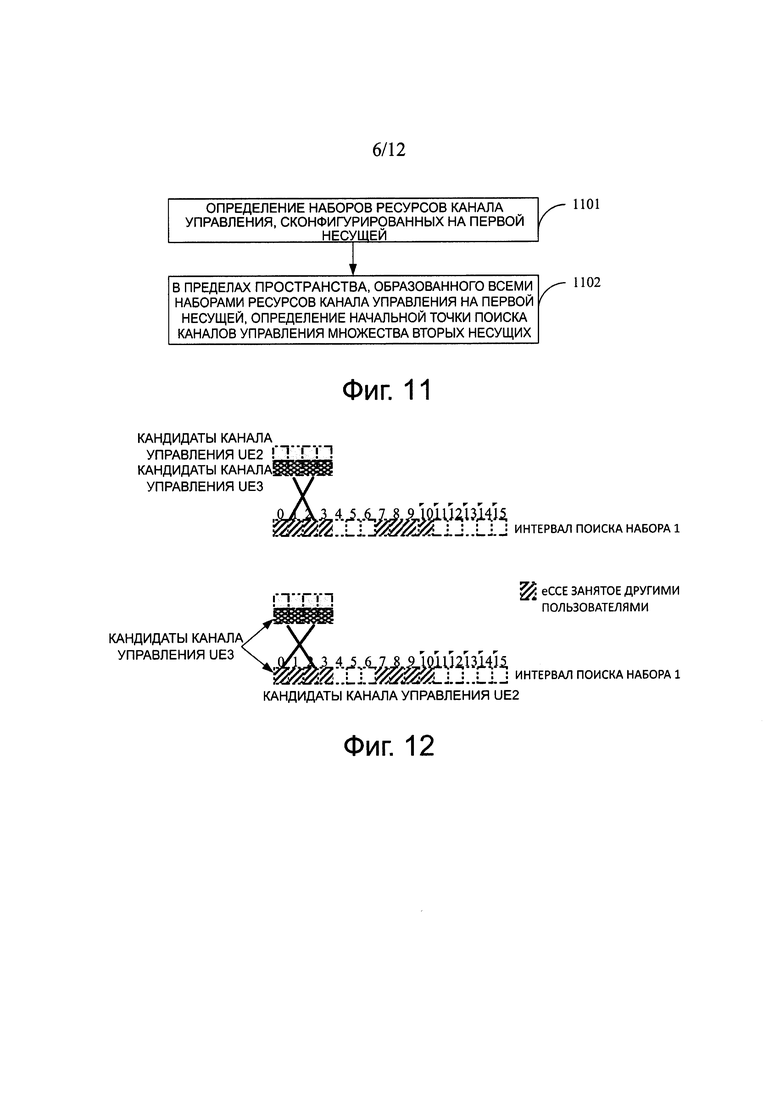
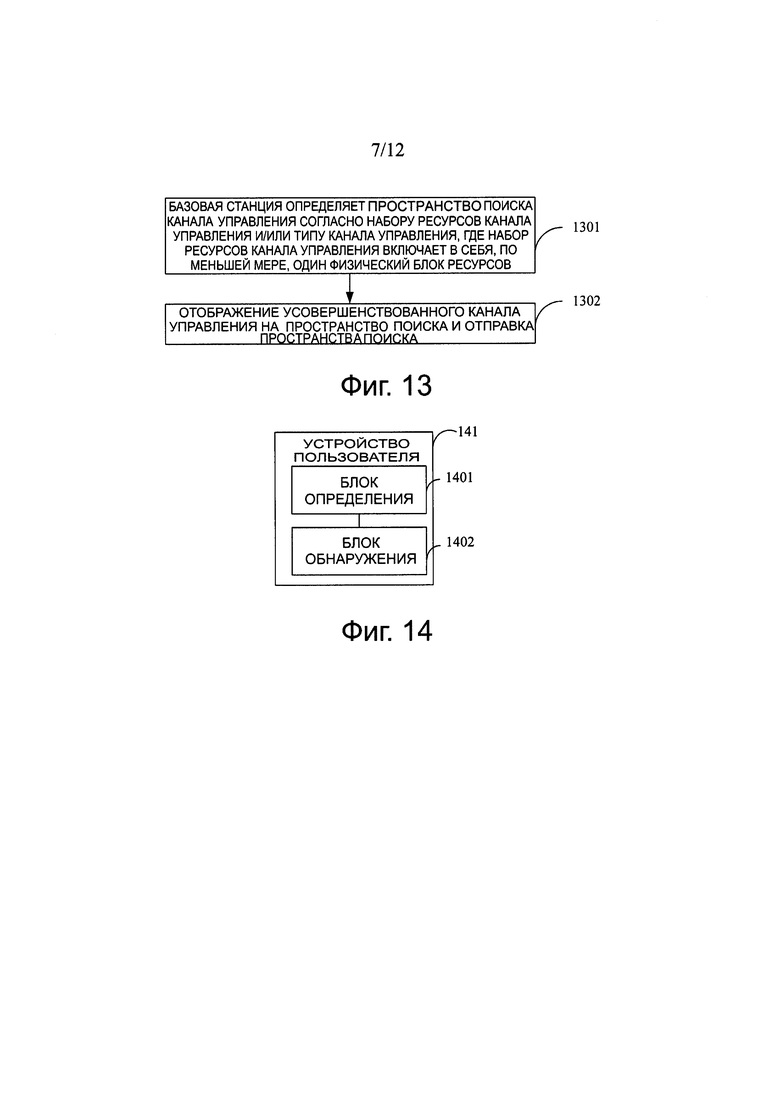
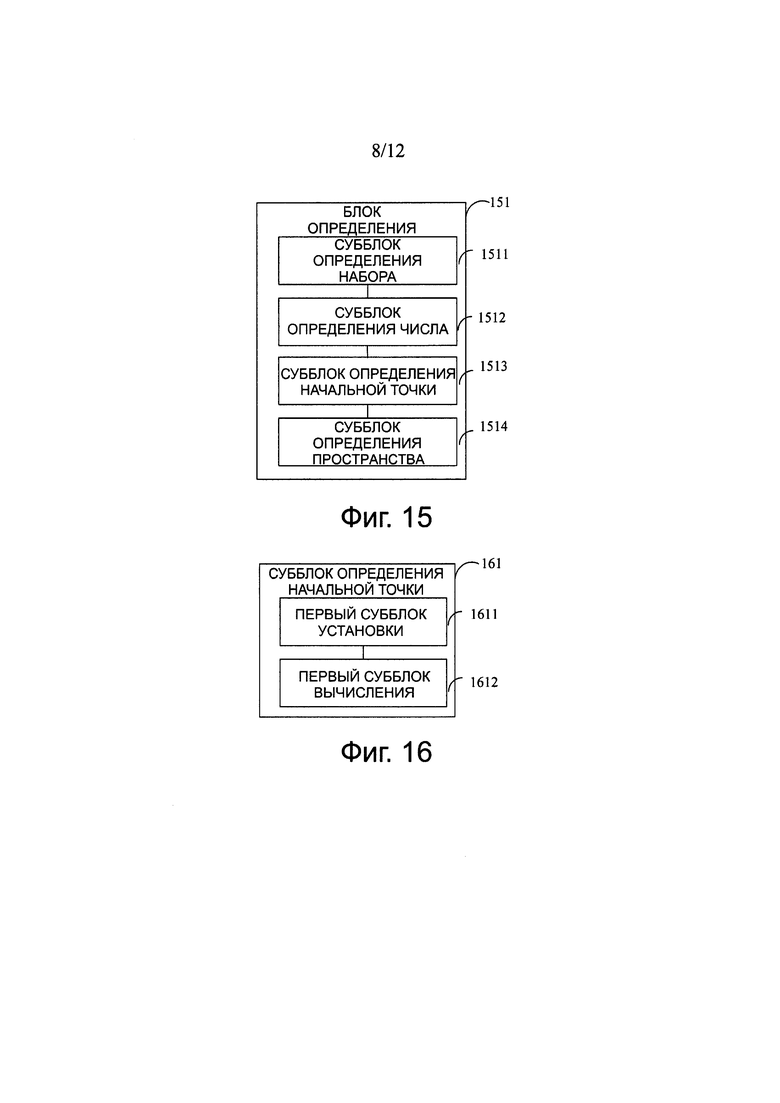
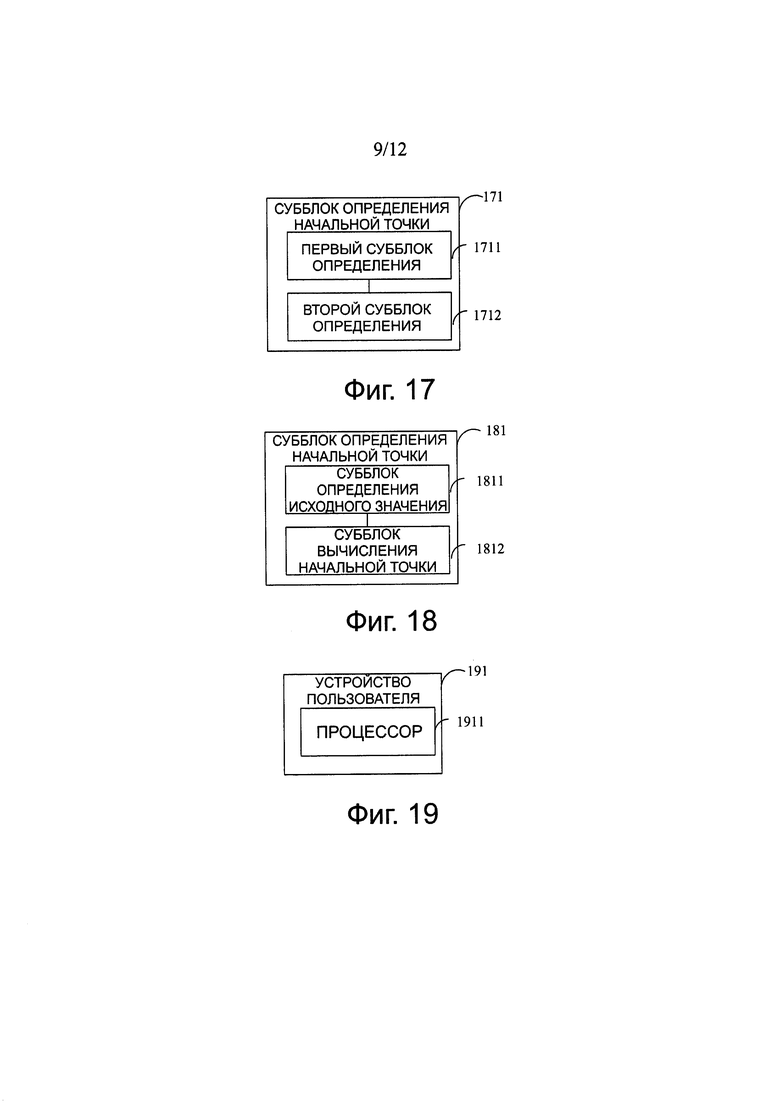
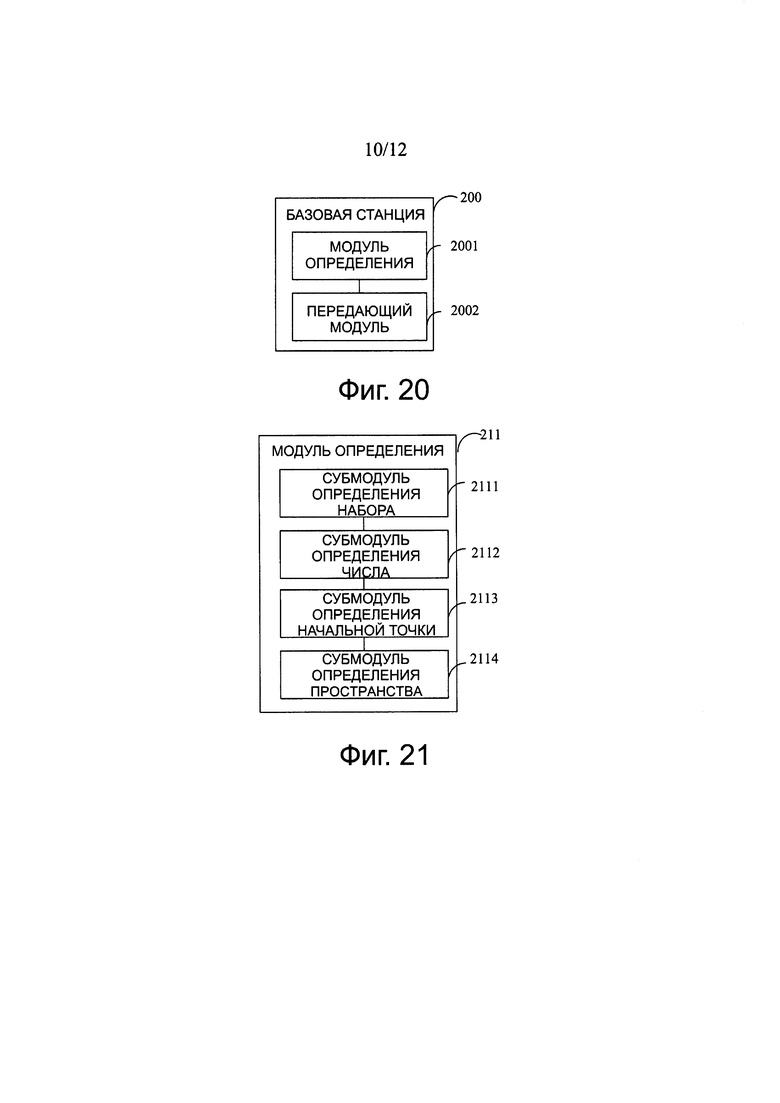
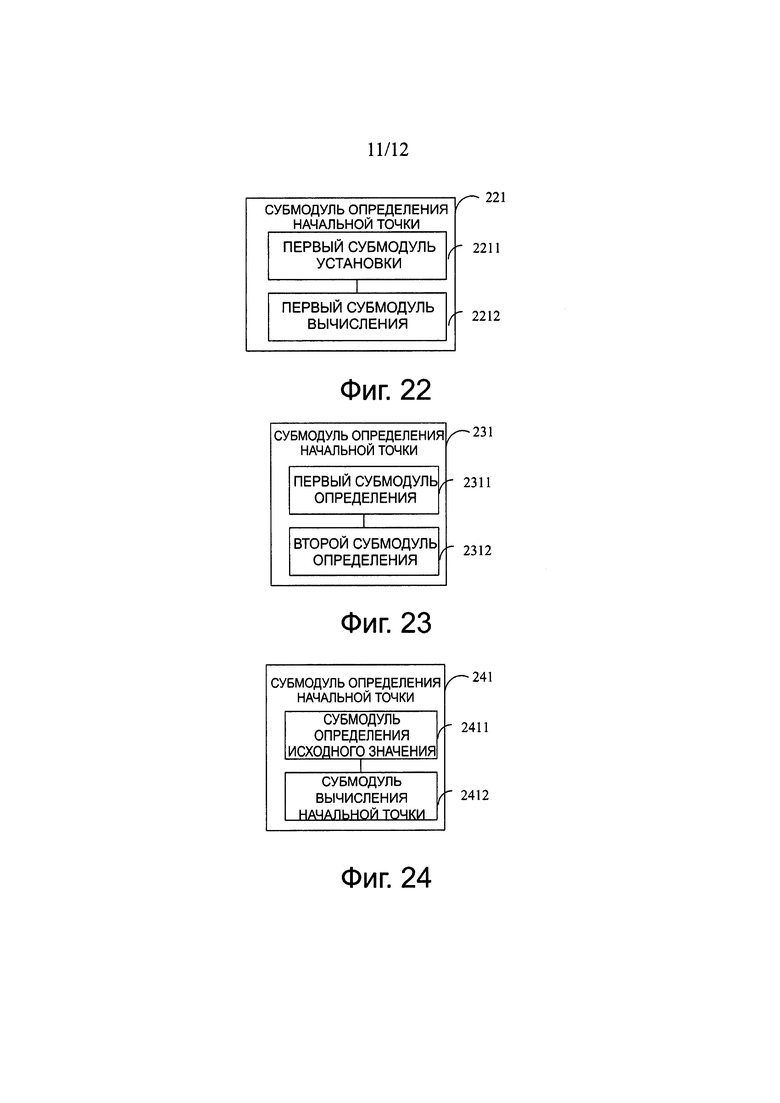
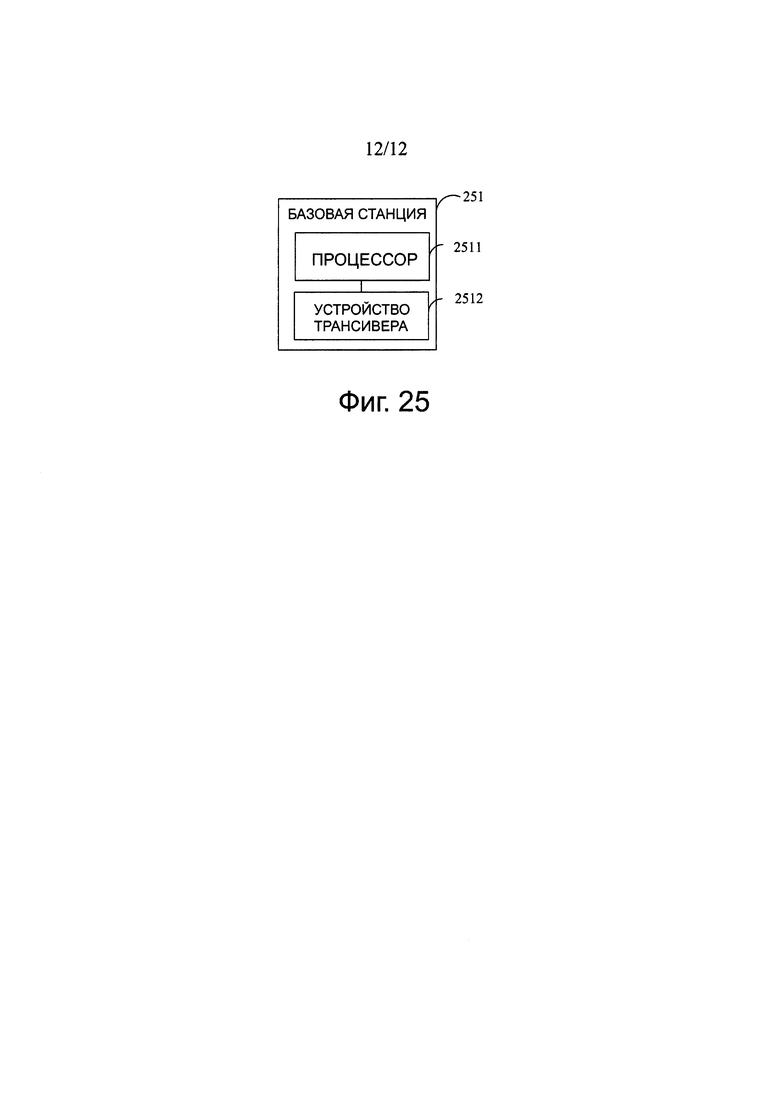
Изобретение относится к области связи. Техническим результатом является обеспечение решения для сценария, в котором множество наборов ресурсов канала управления сконфигурировано на стороне сети для UE. Приводится описание способа обнаружения канала управления и устройства пользователя. Способ обнаружения канала управления включает этапы, на которых: определяют с помощью устройства пользователя пространство поиска канала управления в соответствии с набором ресурсов канала управления и/или типом канала управления; и выполняют обнаружение канала управления в пространстве поиска, при этом набор ресурсов канала управления включает в себя по меньшей мере один физический блок ресурсов. В вариантах осуществления настоящего изобретения UE может определять пространство поиска E-PDCCH в соответствии с набором ресурсов канала управления и/или типом канала управления, тем самым реализуя процесс обнаружения канала управления для UE. 4 н. и 10 з.п. ф-лы, 27 ил.
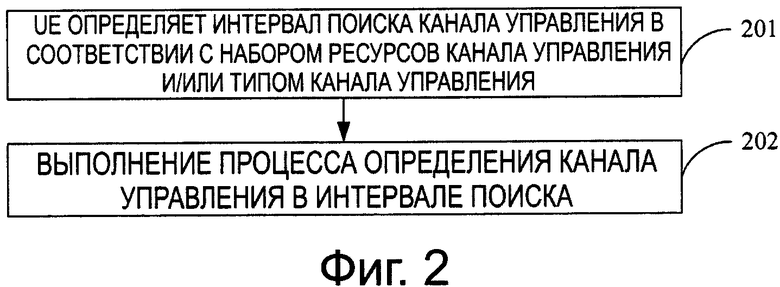
1. Способ обнаружения канала управления, содержащий этапы, на которых:
определяют с помощью пользовательского устройства пространство поиска канала управления в соответствии с набором ресурсов канала управления, при этом набор ресурсов канала управления содержит по меньшей мере один физический блок ресурсов; и
выполняют обнаружение канала управления в пространстве поиска; при этом
этап определения пространства поиска канала управления содержит подэтапы, на которых:
определяют набор ресурсов канала управления, содержащий пространство поиска канала управления;
определяют число кандидатов канала управления пространства поиска канала управления в каждом наборе канала управления;
определяют начальную точку поиска каналов управления; и
определяют пространство поиска в соответствии с отношением между начальной точкой поиска, уровнем агрегирования каналов управления и числом кандидатов канала управления ниже уровня агрегирования, при этом
этап определения начальной точки поиска каналов управления содержит подэтапы, на которых:
определяют исходное значение рекурсивной функции для генерирования начальной точки поиска каналов управления; и
определяют начальную точку поиска в соответствии с исходным значением рекурсивной функции начальной точки поиска и рекурсивную функцию; причем
в различных наборах ресурсов канала управления, исходные значения рекурсивных функций для генерирования начальной точки поиска каналов управления являются одинаковыми; при этом
в различных наборах ресурсов канала управления, рекурсивная функция для обнаружения начальной точки поиска является разной; причем
рекурсивная функция содержит второй характерный параметр, а другой набор ресурсов канала управления соответствует другому второму характерному параметру.
2. Способ по п. 1, в котором рекурсивная функция для определения начальной точки поиска в j-м наборе ресурсов канала управления является:
Yk,j=(C′(j) Yk-1,j)modD, j=0, 1 … K (с)-1, где k (с) является общим количеством наборов ресурсов канала управления, С′(j) является вторым характерным параметром.
3. Способ по п. 1, в котором второй характерный параметр является одним из:
индекса первой PRB пары среди PRB пар в наборе ресурсов канала управления; параметра, сообщенного посредством динамичной сигнализации или сигнализации более высокого уровня; порядкового номера индекса набора физических блоков ресурсов; и значения смещения по отношению к указанному набору ресурсов канала управления.
4. Способ по п. 1, в котором в различных типах канала управления, набор канала управления содержащий пространство поиска канала управления, определяется по-разному.
5. Способ по п. 4, в котором в различных типах канала управления число кандидатов канала управления пространства поиска канала управления в каждом наборе каналов управления определяют различными способами.
6. Способ по п. 4, в котором различные типы канала управления относятся к какой-либо одной из следующих групп:
каналы управления нормального субкадра и каналы управления субкадра мультимедийной широковещательной многоадресной передачи одночастотной сети; полустатически запланированные каналы управления и динамически запланированные каналы управления; каналы управления, обнаруженные в общем пространстве поиска каналов управления и каналы управления, обнаруженные в UE-определенном пространстве поиска; каналы управления планирования сигнализации восходящей линии связи и каналы управления планирования сигнализации нисходящей линии связи; каналы управления централизованной передачи и каналы управления дискретной передачи; каналы управления другой DCI; каналы управления субкадров различных циклических префиксов; каналы управления разных типов конкретного субкадра; каналы управления, переданные в физических парах ресурсов (PRB пары) с различным количеством доступных элементов ресурса (REs); каналы управления, передаваемые элементами канала управления, которые содержат различное количество групп элементов ресурса; и каналы управления разных несущих.
7. Способ передачи канала управления, содержащий этапы, на которых:
определяют с помощью базовой станции пространство поиска канала управления согласно набору ресурсов канала управления, при этом набор ресурсов канала управления содержит по меньшей мере один физический блок ресурсов; и
отображают усовершенствованный канал управления на пространство поиска и передают усовершенствованный канал управления; причем этап определения пространства поиска канала управления содержит подэтапы, на которых:
определяют набор канала управления, содержащий пространство поиска канала управления;
определяют число кандидатов канала управления пространства поиска канала управления в каждом наборе канала управления;
определяют начальную точку поиска каналов управления; и
определяют пространство поиска согласно отношению между начальной точкой поиска, уровнем агрегирования каналов управления и числом кандидатов канала управления ниже уровня агрегирования; при этом
этап определения начальной точки поиска каналов управления содержит подэтапы, на которых:
определяют исходное значение рекурсивной функции для генерирования начальной точки поиска каналов управления; и
определяют начальную точку поиска в зависимости от исходного значения рекурсивной функции начальной точки поиска и рекурсивную функцию; причем
в различных наборах ресурсов канала управления исходные значения рекурсивных функций для генерирования начальной точки поиска каналов управления являются одинаковыми; а
в различных наборах ресурсов канала управления рекурсивная функция для определения начальной точки поиска является различной, причем
рекурсивная функция содержит второй характерный параметр, а другой набор ресурсов канала управления соответствует другому второму характерному параметру.
8. Способ по п. 7, в котором рекурсивная функция для определения начальной точки поиска в j-м наборе ресурсов канала управления является:
Yk,j=(С′(j)Yk-1,j)modD, j=0, 1 … K (с)-1, где k (с) является общим количеством наборов ресурсов канала управления, С′(j) является вторым характерным параметром.
9. Способ по п. 7, в котором второй характерный параметр является одним из:
индекса первой PRB пары среди PRB пар в наборе ресурсов управления канала; параметра, сообщенного посредством динамичной сигнализации или сигнализации более высокого уровня; порядкового номера индекса набора физических блоков ресурсов; и значения по отношению к указанному набору ресурсов канала управления.
10. Способ по п. 7, в котором в различных типах канала управления набор канала управления, содержащий пространство поиска канала управления, определяют по-разному.
11. Способ по п. 7, в котором в различных типах канала управления число кандидатов канала управления пространства поиска канала управления в каждом наборе канала управления определяется различными способами.
12. Способ по п. 10, в котором различные типы канала управления относятся к какой-либо одной из следующих групп:
каналы управления нормального субкадра и каналы управления субкадра мультимедийной широковещательной многоадресной передачи одночастотной сети; полустатически запланированные каналы управления и динамически запланированные каналы управления; каналы управления, обнаруженные в общем пространстве поиска каналов управления, и каналы управления, обнаруженные в UE-определенном пространстве поиска; каналы управления планирования сигнализации восходящей линии связи и каналы управления планирования сигнализации нисходящей линии связи; каналы управления централизованной передачи и каналы управления дискретной передачи; каналы управления другой DCI; каналы управления субкадров различных циклических префиксов; каналы управления разных типов конкретного субкадра; каналы управления, переданные в физических парах ресурсов (PRB пары) с различным количеством доступных элементов ресурса (REs); каналы управления, передаваемые элементами канала управления, которые содержат различное количество групп элементов ресурса; и каналы управления разных несущих.
13. Пользовательское устройство, содержащее:
блок определения, выполненный с возможностью определения пространства поиска канала управления в соответствии с набором ресурсов канала управления и/или типом канала управления, при этом набор ресурсов канала управления содержит по меньшей мере один физический блок ресурсов; и
блок обнаружения, выполненный с возможностью обнаружения канала управления в пространстве поиска, определенном блоком определения, при этом блок определения содержит:
субблок определения набора, выполненный с возможностью определения набора каналов управления, содержащего пространство поиска канала управления;
субблок определения числа, выполненный с возможностью определения числа кандидатов канала управления пространства поиска канала управления в каждом наборе канала управления;
субблок определения начальной точки, выполненный с возможностью определения начальной точки поиска каналов управления; и
субблок определения пространства, выполненный с возможностью определения пространства поиска в соответствии с отношением между начальной точкой поиска, определенной субблоком определения начальной точки, уровнем агрегации каналов управления и числом кандидатов канала управления ниже уровня агрегации; при этом в котором субблок определения начальной точки содержит:
субблок определения исходного значения, выполненный с возможностью определения исходного значения рекурсивной функции для генерирования начальной точки поиска каналов управления; и
субблок вычисления начальной точки, выполненный с возможностью определения начальной точки поиска в соответствии с исходным значением рекурсивной функции начальной точки поиска и рекурсивной функции; при этом
в различных наборах ресурсов канала управления исходные значения рекурсивных функций для генерирования начальной точки поиска каналов управления являются одинаковыми; при этом
в различных наборах ресурсов канала управления рекурсивная функция для обнаружения начальной точки поиска является разной; причем
рекурсивная функция содержит второй характерный параметр, а другой набор ресурсов канала управления соответствует другому второму характерному параметру.
14. Базовая станция, содержащая:
модуль определения, выполненный с возможностью определения пространства поиска канала управления в соответствии с набором ресурсов канала управления, при этом набор ресурсов канала управления содержит по меньшей мере один физический блок ресурсов; и
модуль передачи, выполненный с возможностью отображения усовершенствованного канала управления на пространство поиска, определенный модулем определения, и передачи усовершенствованного канала управления; при этом модуль определения содержит:
субмодуль определения набора, выполненный с возможностью определения набора канала управления, содержащего пространство поиска канала управления;
субмодуль определения числа, выполненный с возможностью определения числа кандидатов канала управления пространства поиска канала управления в каждом наборе канала управления;
субмодуль определения начальной точки, выполненный с возможностью определения начальной точки поиска каналов управления; и
субмодуль определения пространства, выполненный с возможностью определения пространства поиска в соответствии с отношением между начальной точкой поиска, определенной субмодулем определения начальной точки, уровнем агрегации каналов управления и числом кандидатов канала управления ниже уровня агрегации; при этом субмодуль определения начальной точки содержит:
субмодуль определения исходного значения, выполненный с возможностью определения исходного значения рекурсивной функции для генерирования начальной точки поиска каналов управления; и
субмодуль вычисления начальной точки, выполненный с возможностью определения начальной точки поиска в соответствии с исходным значением рекурсивной функции начальной точки поиска и рекурсивной функции; при этом
в различных наборах ресурсов канала управления исходные значения рекурсивных функций для генерирования начальной точки поиска каналов управления являются одинаковыми; при этом
в различных наборах ресурсов канала управления рекурсивная функция для обнаружения начальной точки поиска является разной; причем
рекурсивная функция содержит второй характерный параметр, а другой набор ресурсов канала управления соответствует другому второму характерному параметру.
| EP 20093953 A2, 26.08.2009 | |||
| CN 102355340 A, 15.02.2012 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ЦИФРОВОГО КАНАЛА УПРАВЛЕНИЯ В СОТОВОЙ СИСТЕМЕ РАДИОСВЯЗИ НИЖНИХ ДИАПАЗОНОВ | 1997 |
|
RU2190939C2 |
| CN 102170703 A, 31.08.2011 | |||
| CN 102395206 A, 28.03.2012 | |||
| CN 102469048 A, 23.05.2012. | |||

