Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству обработки информации, способу управления устройством обработки информации, программе и носителю записи информации.
Предпосылки создания изобретения
В последние годы предлагаются самые различные способы ввода операции в устройство обработки информации. В патентной литературе 1 приводится описание устройства, в котором сенсоры размещены на обеих поверхностях устройства, и ввод операции может осуществляться с помощью обоих этих сенсоров.
Список цитирования
Патентная литература
Описание изобретения к патенту США №7088342
Сущность изобретения
Технические проблемы
Например, в случае, когда пользователь удерживает левой рукой устройство обработки информации, в котором дисплей и тактильный сенсор размещены с наложением на передней поверхности, и оперирует тактильным сенсором со стороны передней поверхности пальцем правой руки, то при отображении информации, являющейся объектом отображения, на нижнем правом участке высока вероятность того, эта информация будет закрыта рукой пользователя, и визуальный доступ пользователя к этой информации будет затруднительным. В то же время в случае, когда пользователь удерживает указанное выше устройство обработки информации правой рукой и оперирует тактильным сенсором со стороны передней поверхности пальцем левой руки, то при отображении информации, являющейся объектом отображения, на нижнем левом участке дисплея, высока вероятность того, эта информация будет закрыта рукой пользователя, и визуальный доступ пользователя к этой информации будет затруднительным.
Таким образом, считается, что участок дисплея с затруднительным визуальным доступом для пользователя, изменяется в зависимости от руки, которой пользователь удерживает устройство обработки информации. Поэтому, удобно, чтобы участок дисплея, на котором информация не отображается, изменялся в зависимости от руки, удерживающей устройство обработки информации.
Кроме того, считается, что если тактильный сенсор размещен на задней поверхности устройства обработки информации, то положение, обнаруженное с помощью этого тактильного сенсора, можно использовать для оценки, например, того, какой рукой пользователь удерживает устройство обработки информации - правой или левой. Таким образом, тактильный сенсор на задней поверхности устройства обработки информации, по-видимому, может помогать контролировать участок дисплея, на котором информация не отображается.
Настоящее изобретение разработано с учетом описанной выше проблемы, и один из объектов этого изобретения обеспечивает возможность изменения положения участка дисплея, на котором информация, являющаяся объектом отображения, не отображается, в соответствии с положением, обнаруженным с помощью тактильного сенсора, размещенного напротив тактильного сенсора, размещенного с наложением на дисплей.
Решение проблем
Для решения описанной выше проблемы согласно настоящему изобретению предлагается устройство обработки информации, включающее в себя блок отображения, передний тактильный сенсор, размещенный с наложением на блоке отображения и предназначенный для обнаружения положения объекта на воспринимающей поверхности, задний тактильный сенсор, размещенный напротив переднего тактильного сенсора и предназначенный для обнаружения положения объекта на воспринимающей поверхности, а также блок управления. Причем на основе, по меньшей мере, одного положения, обнаруженного с помощью заднего тактильного сенсора, блок управления идентифицирует в качестве запретного участка один из двух участков, каждый из которых занимает часть блока отображения, и которые размещены слева и справа, и обеспечивает отображение информации, являющейся объектом отображения, на участке блока отображения за границами указанного запретного участка.
Кроме того, способ управления устройством обработки информации согласно настоящему изобретению представляет собой способ управления устройством обработки информации, включающим в себя блок отображения, передний тактильный сенсор, размещенный с наложением на блоке отображения и предназначенный для обнаружения положения объекта на воспринимающей поверхности, а также задний тактильный сенсор, размещенный напротив переднего тактильного сенсора и предназначенный для обнаружения положения объекта на воспринимающей поверхности. Способ управления содержит: этап идентификации одного из двух участков, каждый из которых занимает часть блока отображения и которые размещены слева и справа, в качестве запретного участка на основе, по меньшей мере, от одного положения, обнаруженного с помощью заднего тактильного сенсора; и этап обеспечения отображения информации, являющейся объектом отображения, на участке блока отображения за границами указанного запретного участка.
Кроме того, программа для устройства обработки информации согласно настоящему изобретению представляет собой программу для устройства обработки информации, включающего в себя блок отображения, передний тактильный сенсор, размещенный с наложением на блоке отображения и предназначенный для обнаружения положения объекта на воспринимающей поверхности, а также задний тактильный сенсор, размещенный напротив переднего тактильного сенсора и предназначенный для обнаружения положения объекта на воспринимающей поверхности. Программа обеспечивает осуществление этим устройством обработки информации этапа идентификации одного из двух запретных участков, каждых из которых занимает часть блока отображения, и которые размещены слева и справа, на основе, по меньшей мере, одного положения, обнаруженного с помощью заднего тактильного сенсора, и этапа обеспечения отображения информации, являющейся объектом отображения, на участке блока отображения за границами идентифицированного запретного участка.
Кроме того, носитель информации согласно настоящему изобретению представляет собой считываемый компьютером носитель информации, на котором хранится программа для устройства обработки информации, включающего в себя блок отображения, передний тактильный сенсор, размещенный с наложением на блоке отображения и предназначенный для обнаружения положения объекта на воспринимающей поверхности, а также задний тактильный сенсор, размещенный напротив переднего тактильного сенсора и предназначенный для обнаружения положения объекта на воспринимающей поверхности. Программа обеспечивает осуществление этим устройством обработки информации этапа идентификации одного из двух запретных участков, каждый из которых занимает часть блока отображения, и которые размещены слева и справа, на основе, по меньшей мере, одного положения обнаруженного с помощью заднего тактильного сенсора, и этапа обеспечения отображения информации, являющейся объектом отображения, на участке блока отображения за границами идентифицированного запретного участка.
Согласно настоящему изобретению информация, являющаяся объектом отображения, отображается на участке за границами запретного участка, идентифицированного на основе положения, идентифицированного с помощью заднего тактильного сенсора. Поэтому положение участка, на котором информация, являющаяся объектом отображения, не отображается, может изменяться в соответствии с положением, обнаруженным с помощью тактильного сенсора, размещенного напротив тактильного сенсора, размещенного с наложением на дисплей.
Согласно одному аспекту настоящего изобретения в зависимости от того, является ли поперечное направление блока отображения направлением вдоль вертикального направления или продольное направление блока отображения является направлением вдоль вертикального направления, соотношение соответствия между положением, обнаруженным с помощью заднего тактильного сенсора, и запретным участком, идентифицированным из указанных двух участков, изменяется на обратное.
Кроме того, согласно одному аспекту настоящего изобретения на основе того, находится ли указанное одно положение, обнаруженное с помощью заднего тактильного сенсора, на участке заднего тактильного сенсора, расположенном напротив Левой половины переднего тактильного сенсора, или на участке заднего тактильного сенсора, расположенном напротив правой половины переднего тактильного сенсора, блок управления идентифицирует в качестве запретного участка один из указанных двух участков.
Кроме того, согласно одному аспекту настоящего изобретения в случае, когда указанное одно положение, обнаруженное с помощью заднего тактильного сенсора, находится на участке заднего тактильного сенсора, расположенного напротив левой половины переднего тактильного сенсора, из указанных двух участков участок блок управления идентифицирует в качестве запретного участка, расположенный слева, а в противном случае - участок, расположенный справа.
Кроме того, согласно одному аспекту настоящего изобретения устройство обработки информации дополнительно включает в себя датчик направления, который обнаруживает направление блока отображения. Причем на основе результата обнаружения с помощью датчика направления блок управления определяет, является ли продольное направление блока отображения направлением вдоль вертикального направления, или поперечное направление блока отображения является направлением вдоль вертикального направления. При определении того, что поперечное направление блока отображения является направлением вдоль вертикального направления, в случае, когда указанное одно положение, обнаруженное с помощью заднего тактильного сенсора, находится на участке заднего тактильного сенсора, расположенном напротив левой половины переднего тактильного сенсора, блок управления идентифицирует в качестве запретного участка из указанных двух участков участок, расположенный слева, а в противном случае идентифицирует в качестве запретного участка из указанных двух участков участок, расположенный справа. При определении того, что продольное направление блока отображения является направлением вдоль вертикального направления, в случае, когда указанное одно положение, обнаруженное с помощью заднего тактильного сенсора, находится на участке заднего тактильного сенсора, расположенном напротив левой половины переднего тактильного сенсора, блок управления, идентифицирует в качестве запретного участка из указанных двух участков участок, расположенный справа, а в противном случае идентифицирует в качестве запретного участка из указанных двух участков участок, расположенный слева.
Кроме того, согласно одному аспекту настоящего изобретения на основе положения, обнаруженного с помощью переднего тактильного сенсора, блок управления принимает решение о положениях указанных двух участков.
Кроме того, согласно одному аспекту настоящего изобретения блок управления принимает решение о том, что из указанных двух участков участок блока отображения, расположенный снизу слева от положения, обнаруженного с помощью переднего тактильного сенсора, является участком слева, а участок блока отображения, расположенный снизу справа от положения, обнаруженного с помощью переднего тактильного сенсора, является участком справа.
Кроме того, согласно одному аспекту настоящего изобретения в случае существования множества порций информации, являющихся объектами отображения, и упорядочивания указанного множества порций информации блок управления обеспечивает отображение указанного упорядоченного множества порций информации на множестве упорядоченных участков блока отображения, полученных в результате деления участка за границами запретного участка, таким образом, что порядок информации соответствует порядку участка.
Краткое описание чертежей
Фиг. 1A - вид в перспективе, демонстрирующий внешний вид устройства обработки информации в соответствии с одним вариантом осуществления настоящего изобретения.
Фиг. 1B - вид в перспективе, демонстрирующий внешний вид устройства обработки информации в соответствии с одним вариантом осуществления настоящего изобретения.
Фиг. 2 - блок-схема, иллюстрирующая один пример аппаратной конфигурации устройства обработки информации в соответствии с одним вариантом осуществления настоящего изобретения.
Фиг. 3 - функциональная блок-схема, иллюстрирующая один пример функций, реализуемых с помощью устройства обработки информации в соответствии с одним вариантом осуществления настоящего изобретения.
Фиг. 4A - вид, схематически иллюстрирующий один пример состояния, в котором пользователь удерживает устройство обработки информации в продольном направлении левой рукой.
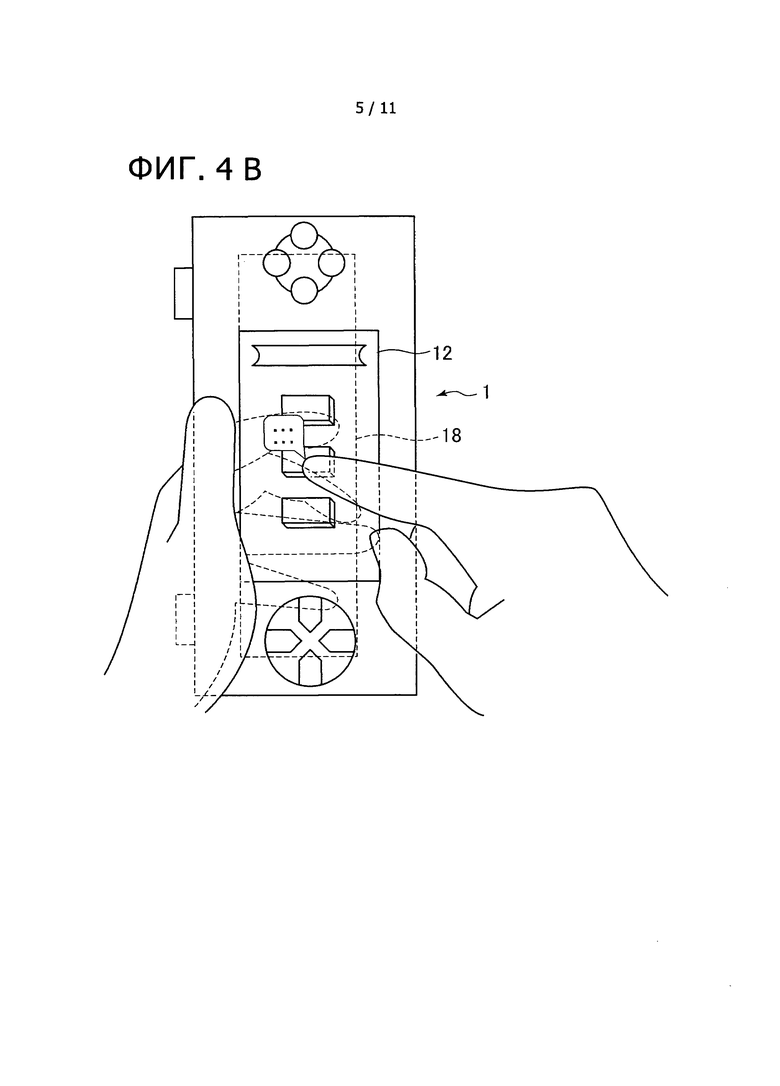
Фиг. 4B - вид, схематически иллюстрирующий один пример состояния, в котором пользователь удерживает устройство обработки информации в поперечном направлении левой рукой.
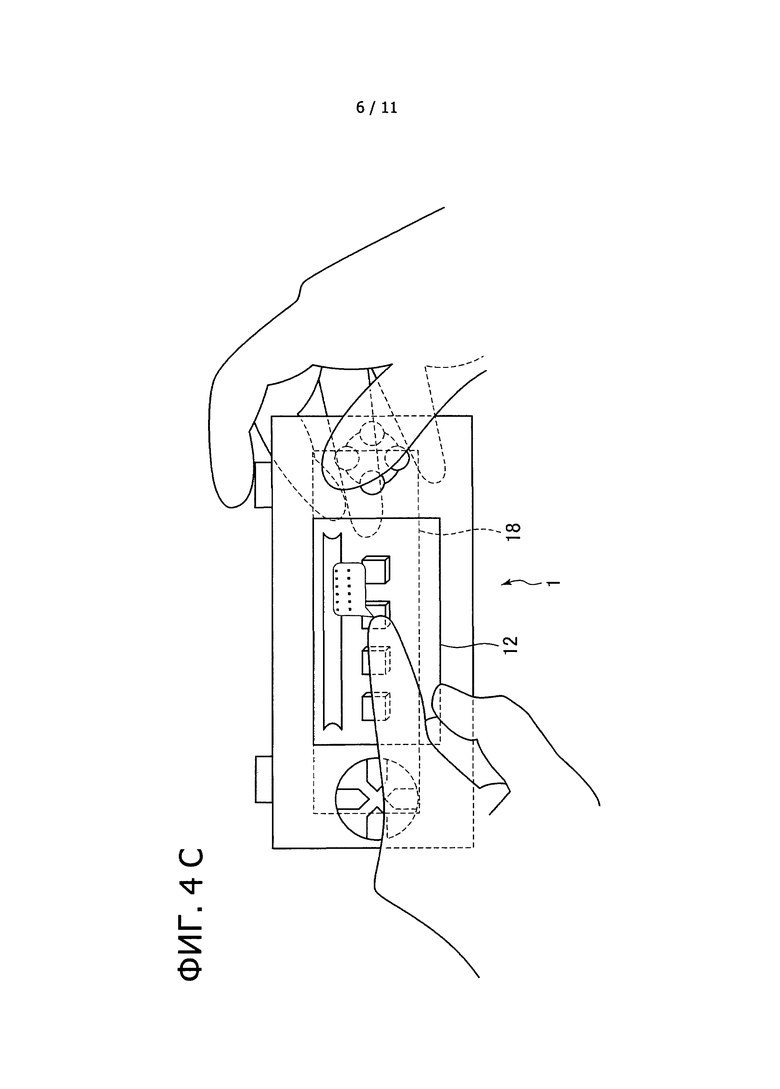
Фиг. 4C - вид, схематически иллюстрирующий один пример состояния, в котором пользователь удерживает устройство обработки информации в продольном направлении правой рукой.
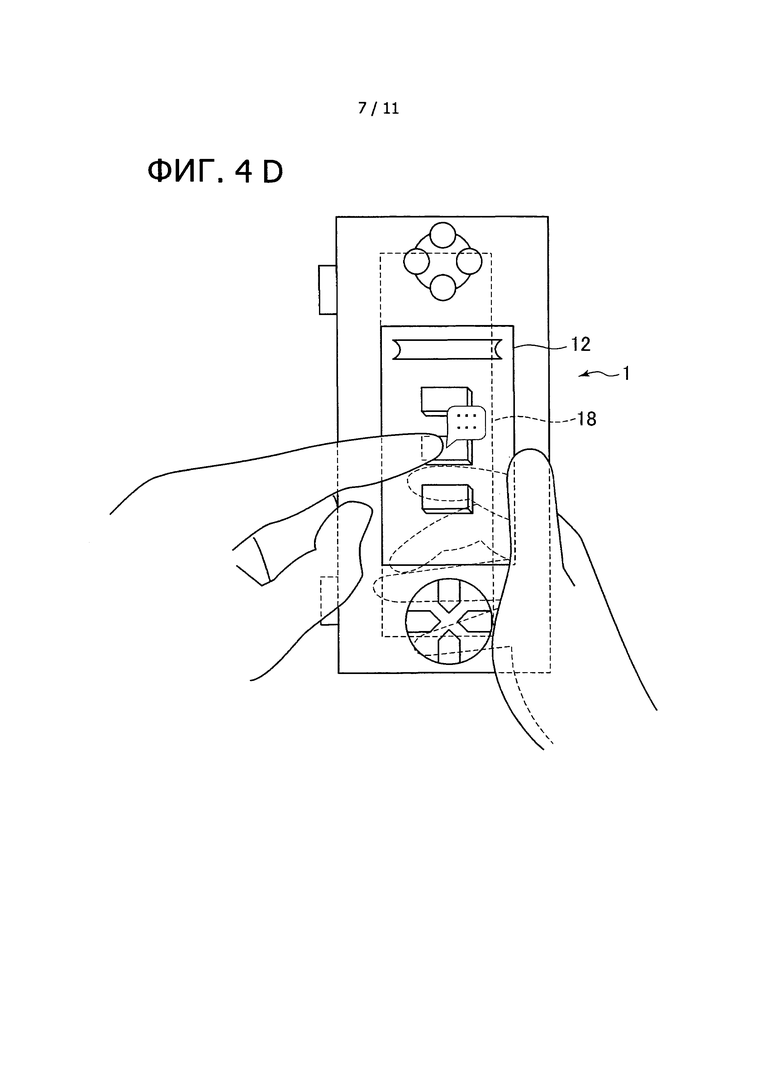
Фиг. 4D - вид, схематически иллюстрирующий один пример состояния, в котором пользователь удерживает устройство обработки информации в поперечном направлении правой рукой.
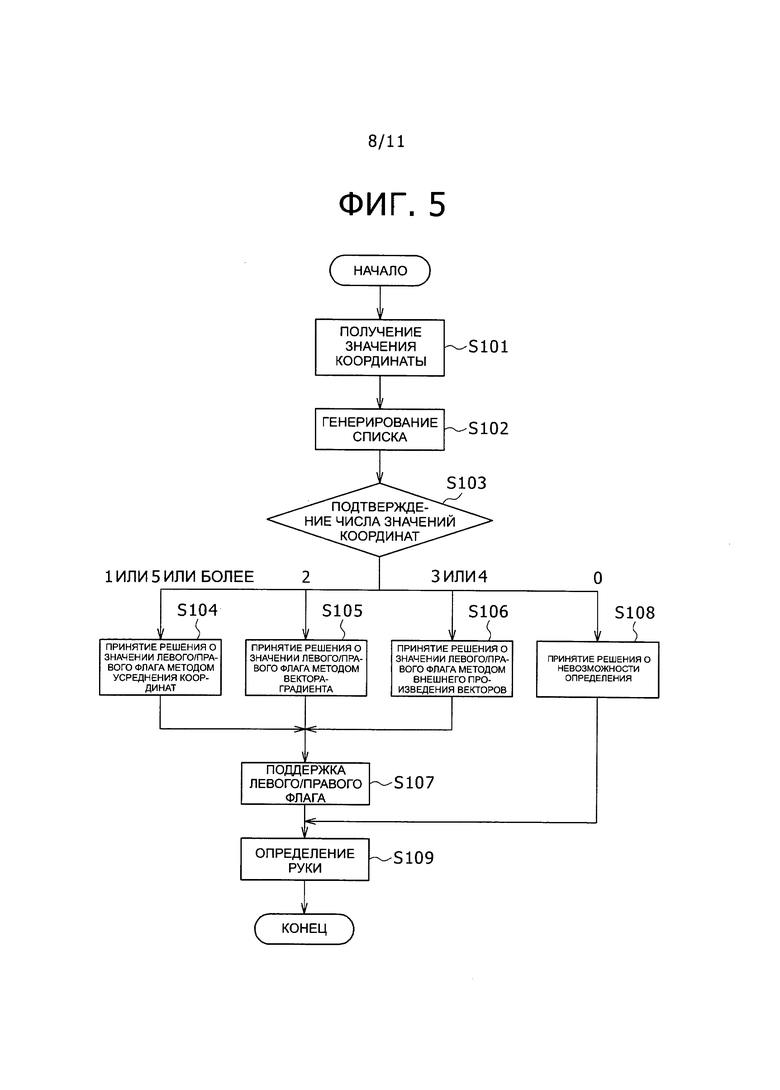
Фиг. 5 - логическая блок-схема, иллюстрирующая один пример потока обработки, исполняемой в устройстве обработки информации в соответствии с одним вариантом осуществления настоящего изобретения.
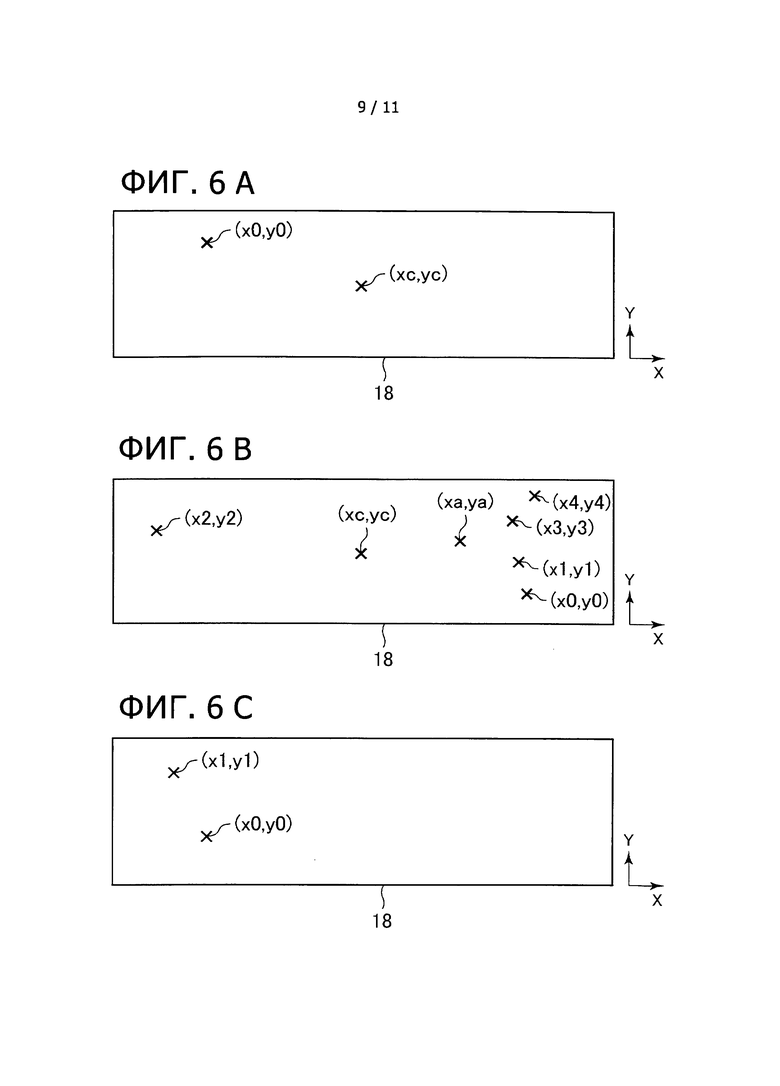
Фиг. 6A - пояснительная схема, иллюстрирующая метод усреднения координат.
Фиг. 6B - пояснительная схема, иллюстрирующая метод усреднения координат.
Фиг. 6C - пояснительная схема, иллюстрирующая метод вектора-градиента.
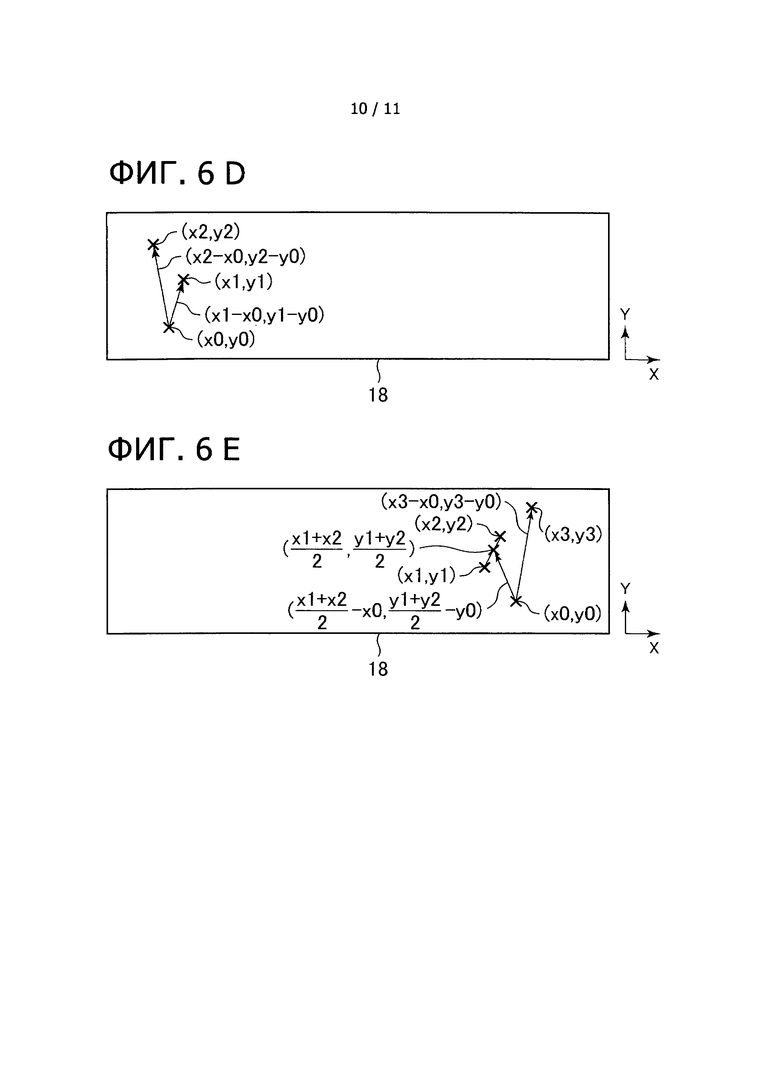
Фиг. 6D - пояснительная схема, иллюстрирующая метод внешнего произведения векторов.
Фиг. 6E - пояснительная схема, иллюстрирующая метод внешнего произведения векторов.
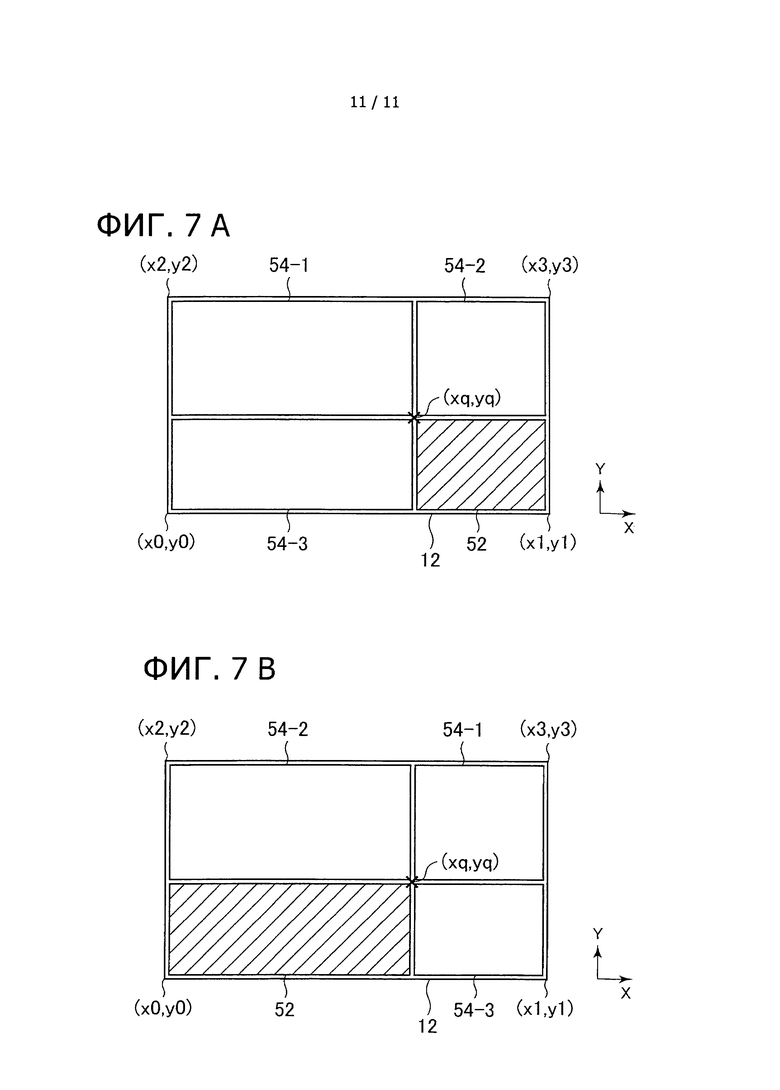
Фиг. 7A - вид, схематически иллюстрирующий один пример запретного участка и приоритетных участков.
Фиг. 7B - вид, схематически иллюстрирующий один пример запретного участка и приоритетных участков.
Описание вариантов осуществления
Ниже приводится подробное описание варианта осуществления настоящего изобретения, сопровождаемое ссылками на чертежи.
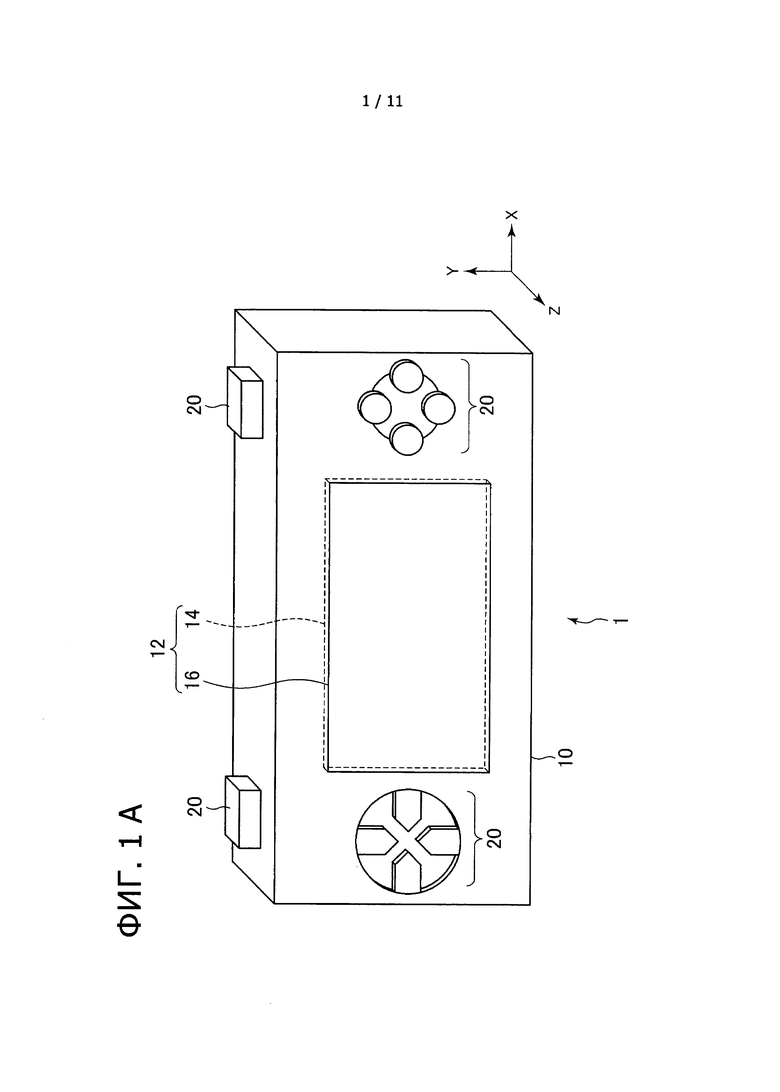
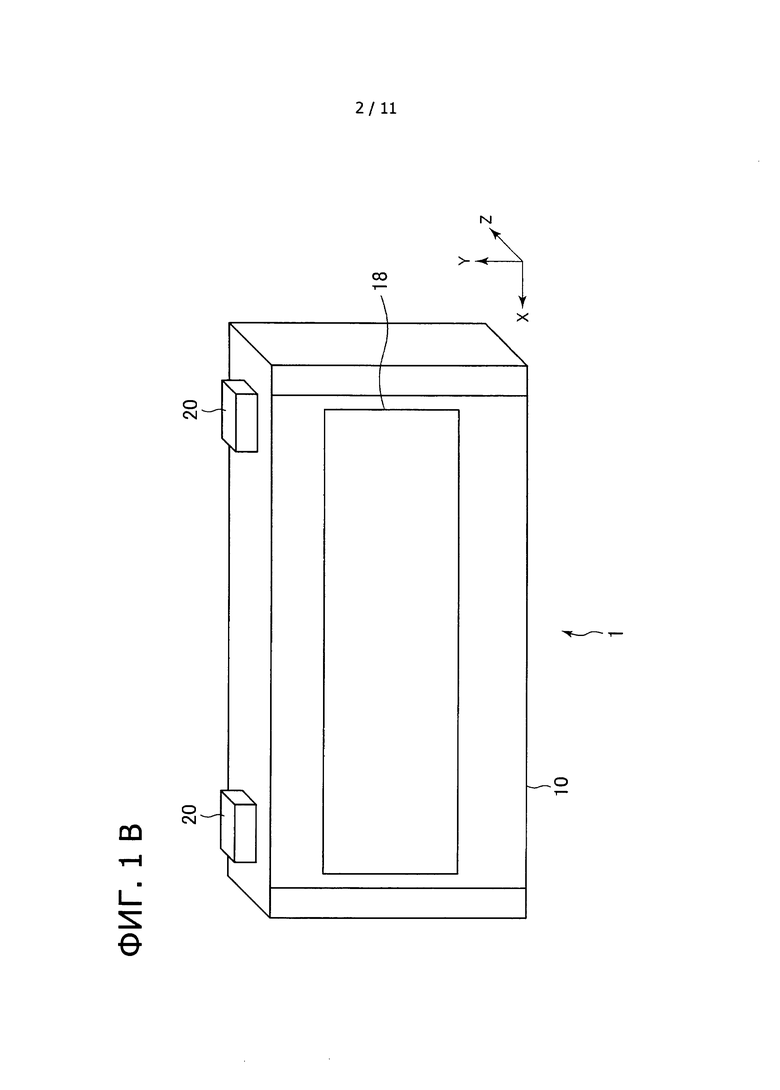
На фиг. 1A и 1B представлены виды в перспективе, демонстрирующие внешний вид устройства 1 обработки информации в соответствии с одним вариантом осуществления настоящего изобретения. На фиг. 1A представлен внешний вид устройства 1 обработки информации со стороны передней поверхности, а на фиг. 1B представлен внешний вид этого устройства со стороны задней поверхности. Предположим, что устройство 1 обработки информации согласно рассматриваемому варианту осуществления является портативным устройством, таким как портативный игровой автомат.
Как показано на этих фигурах, корпус 10 устройства 1 обработки информации имеет в целом форму практически прямоугольной плоской пластины. Ниже горизонтальное направление (направление ширины) корпуса 10 задается как направление оси X, вертикальное направление (направление высоты) - как направление оси Y, а направление толщины (направление глубины) - как направление оси Z. Кроме того, в рассматриваемом варианте осуществления направление слева направо со стороны передней поверхности корпуса 10 является положительным направлениям оси X, направление снизу вверх со стороны передней поверхности корпуса 10 - положительным направлением оси Y, а направление от задней поверхности до передней поверхности корпуса 10 - положительным направлением оси Z.
На передней поверхности корпуса 10 имеется сенсорная панель 12. Сенсорная панель 12 имеет практически прямоугольную форму и включает в себя дисплей 14 и передний тактильный сенсор 16. Дисплей 14 может представлять собой одно из устройств отображения изображения различных видов, таких как жидкокристаллическая панель и органическая электролюминесцентная панель.
Передний тактильный сенсор 16 размещен с наложением на дисплее 14 и имеет практически прямоугольную воспринимающую поверхность, форма и размеры которой соответствуют поверхности отображения дисплея 14. При этом в рассматриваемом варианте осуществления передний тактильный сенсор 16 последовательно обнаруживает контакт объекта, такого как палец пользователя и стилус, с этой воспринимающей поверхностью с заданным временным интервалом. При обнаружении контакта объекта передний тактильный сенсор 16 обнаруживает положение контакта объекта. Передний тактильный сенсор 16 не обязательно обнаруживает положение объекта только в случае приведения объекта в контакт с воспринимающей поверхностью и может обнаруживать положение объекта относительно воспринимающей поверхности и в случае приближения объекта к зоне обнаружения на воспринимающей поверхности. Кроме того, передний тактильный сенсор 16 может представлять собой устройство любой системы, такой как емкостная система, система, чувствительная к давлению, и оптическая система, если это устройство обеспечивает возможность обнаружения положения объекта на воспринимающей поверхности. Предположим, что в рассматриваемом варианте осуществления передний тактильный сенсор 16 является многоточечным тактильным сенсором с возможностью обнаружения контакта объектов во множестве точек (например, максимум в восьми точках). Кроме того, передний тактильный сенсор 16 может представлять собой сенсор с возможностью обнаружения площади участка контакта (площади контакта) объекта с воспринимающей поверхностью и силу, с которой объект давит на воспринимающую поверхность (давление).
Кроме того, в рассматриваемом варианте осуществления на задней поверхности корпуса 10 имеется задний тактильный сенсор 18, размещенный напротив переднего тактильного сенсора 16. Кроме того, в рассматриваемом варианте осуществления задний тактильный сенсор 18 размещен так, что если смотреть со стороны передней поверхности корпуса 10, левая половина заднего тактильного сенсора 18 находится напротив левой половины переднего тактильного сенсора 16, а правая половина заднего тактильного сенсора 18 находится напротив правой половины переднего тактильного сенсора 16. Этот задний тактильный сенсор 18 имеет практически прямоугольную воспринимающую поверхность, длина которой в направлении оси X превышает соответствующую длину воспринимающей поверхности переднего тактильного сенсора 16, а длина в направлении оси Y короче, чем соответствующая длина переднего тактильного сенсора 16. Точно так же, как и передний тактильный сенсору 16, задний тактильный сенсор 18 обнаруживает положение объекта на воспринимающей поверхности с заданным временным интервалом. То есть поверхность отображения дисплея 14, воспринимающая поверхность переднего тактильного сенсора 16 и воспринимающая поверхность заднего тактильного сенсора 18 размещены с ориентацией, параллельной плоскости XY корпуса 10, и выстроены по прямой линии вдоль направления толщины корпуса 10 (вдоль направления оси Z). Предположим, что в рассматриваемом варианте осуществления задний тактильный сенсор 18 является многоточечным тактильным сенсором с возможностью обнаружения контакта объектов во множестве точек точно так же, как и передний тактильный сенсор 16. Точно так же, как и передний тактильный сенсор 16, задний тактильный сенсор 18 может представлять собой сенсор различных видов систем. Если передний тактильный сенсор 16 и задний тактильный сенсор 18 размещены один против другого, то длина заднего тактильного сенсора 18 в направлении оси X не обязательно должна превышать соответствующую длину переднего тактильного сенсора 16, а длина заднего тактильного сенсора 18 в направлении оси Y не обязательно должна быть короче, чем соответствующая длина переднего тактильного сенсора 16, как указано выше. Например, передний тактильный сенсор 16 и задний тактильный сенсор 18 могут иметь практически совпадающие форму и размеры.
Кроме того, на передней поверхности и верхней поверхности устройства 1 обработки информации согласно рассматриваемому варианту осуществления имеются кнопки 20. В рассматриваемом варианте осуществления на передней поверхности устройства 1 обработки информации имеется четыре кнопки 20 (группа кнопок навигации), установленные в соответствии с направлениями вверх, вниз, влево и вправо на левой стороне дисплея 14, и четыре кнопки 20, установленные на правой стороне дисплея 14. Кроме того, на верхней поверхности устройства 1 обработки информации имеется две кнопки 20, размещенные слева и справа.
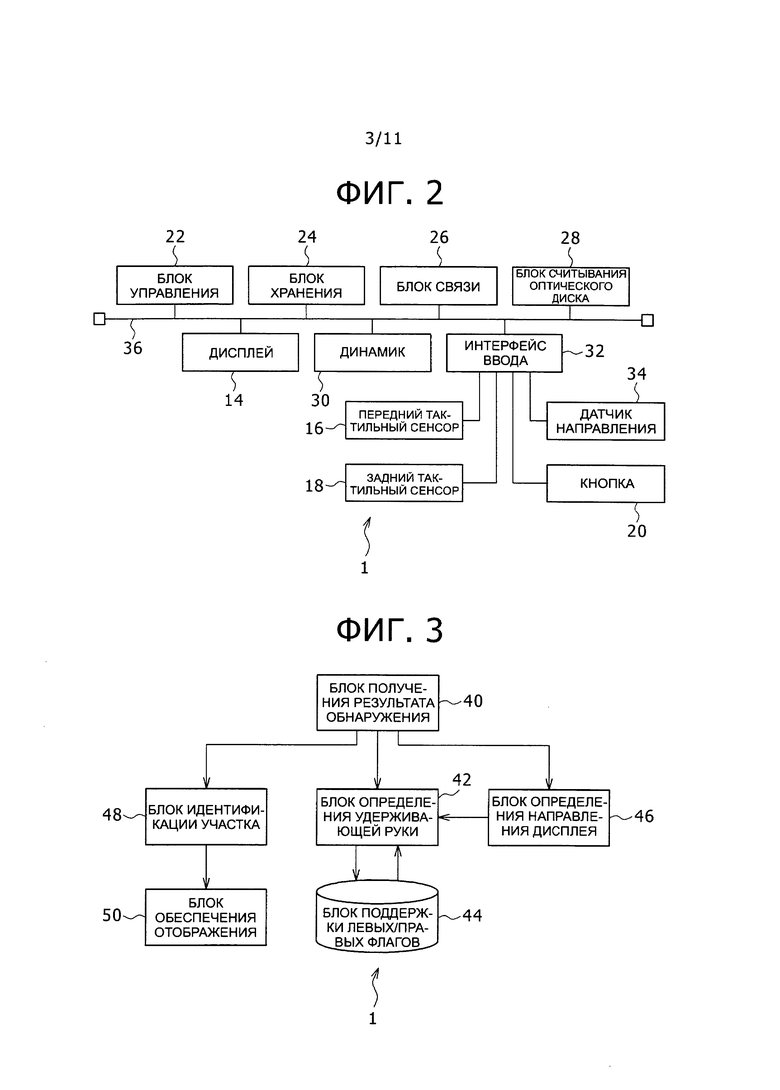
На фиг. 2 изображена блок-схема, иллюстрирующая один пример аппаратной конфигурации устройства 1 обработки информации, представленного на фиг. 1A и 1B. Как показано на фиг. 2, помимо рассмотренных выше дисплея 14, переднего тактильного сенсора 16, заднего тактильного сенсора 18 и кнопок 20 устройство 1 обработки информации включает в себя блок 22 управления, блок 24 хранения, блок 26 связи,, блок 28 считывания оптического диска, динамик 30, интерфейс 26 ввода и датчик 34 направления. Кроме того, в рассматриваемом варианте осуществления дисплей 14, блок 22 управления, блок 24 хранения, блок 26 связи, блок 28 считывания оптического диска, динамик 30 и интерфейс 26 ввода соединены одни с другими через внутреннюю шину 36.
Блок 22 управления представляет собой, например, CPU или что-либо подобное и обеспечивает исполнение различных видов обработки информации в соответствии с программой, хранимой в блоке 24 хранения. Блок 24 хранения представляет собой, например, элемент памяти, такой как RAM или ROM, накопитель на диске или что-либо подобное и обеспечивает хранение программ, подлежащих исполнению с помощью блока 22 управления, и различные виды данных. Кроме того, блок 24 хранения работает также и как рабочая память блока 22 управления. Блок 26 связи представляет собой, например, сетевой интерфейс или что-либо подобное (в частности, например, модуль беспроводной LAN) и в соответствии с вводом команды от блока 22 управления обеспечивает передачу информации на другое устройство 1 обработки информации, сервер (непоказанный) в Интернете и т.д. Кроме того, этот блок 26 связи обеспечивает вывод принимаемой информации на блок 22 управления. Блок 28 считывания оптического диска в соответствии с командой от блока 22 управления считывает программу и данные, хранимые на оптическом диске. Устройство 1 обработки информации может быть выполнено с возможностью считывания программы и данных, хранимых на другом считываемом компьютером носителе информации, отличном от оптического диска. Динамик 30 в соответствии с командой, полученной от блока 22 управления, обеспечивает вывод звука во внешнее пространство. Датчик 34 направления представляет собой датчик, который обнаруживает ориентацию корпуса 10. В рассматриваемом варианте осуществления датчик 34 направления представляет собой, например, трехосевой датчик ускорения с возможностью обнаружения ориентации гравитационного ускорения, что позволяет обнаруживать ориентацию корпуса 10 относительно вертикального направления с помощью датчика 34 направления. В рассматриваемом варианте осуществления датчик 34 направления обнаруживает ориентацию корпуса 10 относительно вертикального направления с заданным временным интервалом.
Кроме того, в рассматриваемом варианте осуществления передний тактильный сенсор 16, задний тактильный сенсор 18, датчик 34 направления и кнопки 20 соединены с интерфейсом 26 ввода. При этом обмен данными между передним тактильным сенсором 16, задним тактильным сенсором 18, датчиком 34 направления или кнопками 20 и блоком 22 управления осуществляется через интерфейс 26 ввода.
На фиг. 3 изображена функциональная блок-схема, иллюстрирующая один пример функций, реализуемых с помощью устройства 1 обработки информации в соответствии с рассматриваемым вариантом осуществления настоящего изобретения. Как показано на фиг. 3, устройство 1 обработки информации согласно рассматриваемому варианту осуществления исполняет функции устройства, включающего в себя блок 40 получения результата обнаружения, блок 42 определения удерживающей руки, блок 44 поддержки левых/правых флагов, блок 46 определения направления дисплея, блок 48 идентификации участка, и блок 50 обеспечения отображения. Блок 44 поддержки левых/правых флагов реализуется, главным образом, с помощью блока 24 хранения. Блок 40 получения результата обнаружения реализуется, главным образом, с помощью блока 22 управления, переднего тактильного сенсора 16, заднего тактильного сенсора 18 и датчика 34 направления. Другие элементы реализуются, главным образом, с помощью блока 22 управления. Эти элементы реализуются в результате исполнения программы, инсталлированной в устройстве 1 обработки информации, являющемся компьютером, с помощью блока 22 управления устройства 1 обработки информации. Перенос этой программы на устройство 1 обработки информации осуществляется, например, через считываемый компьютером носитель информации, такой как CD-ROM или DVD-ROM или через сеть связи, такой как Интернет.
Пользователь приводит свой собственный палец в контакт с воспринимающими поверхностями переднего тактильного сенсора 16 и заднего тактильного сенсора 18 устройства 1 обработки информации согласно рассматриваемому варианту осуществления и в результате перемещения своего пальца в состоянии контакта с этими воспринимающими поверхностями осуществляет ввод операции в устройство 1 обработки информации. Кроме того, допускается также осуществление ввода операции в устройство 1 обработки информации в результате нажатия кнопок 20.
Кроме того, в большинстве случаев для осуществления указанного выше ввода операции пользователь удерживает устройство 1 обработки информации согласно рассматриваемому варианту осуществления одной рукой или обеими руками. Кроме того, считается, что в зависимости от вида прикладной программы, исполняемой устройством 1 обработки информации, и т.д., в одних случаях пользователь удерживает устройство 1 обработки информации согласно рассматриваемому варианту осуществления в продольном направлении (удерживает краевой участок вдоль поперечного направления), а в других - в поперечном направлении (удерживает краевой участок вдоль продольного направления). Кроме того, считается, что при удерживании устройства 1 обработки информации одной рукой в одних случаях пользователь удерживает его левой рукой, а в других случаях - правой рукой.
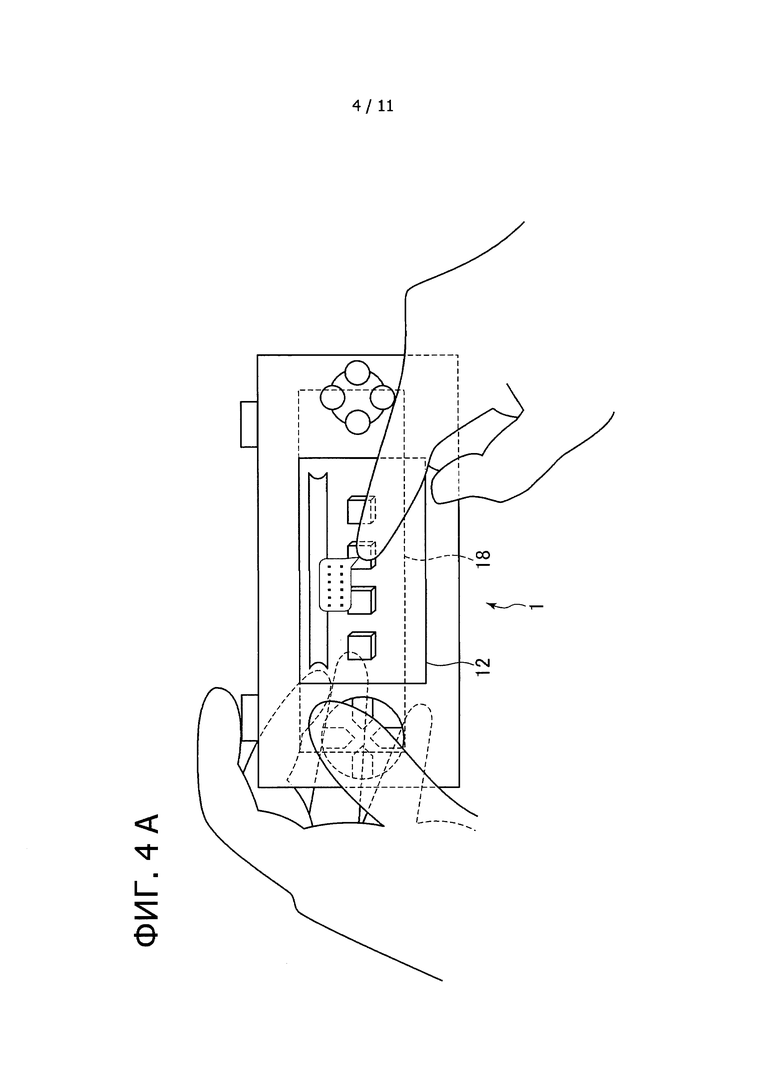
Фиг. 4A иллюстрирует один пример состояния, при котором пользователь удерживает устройство 1 обработки информации в продольном направлении левой рукой. Фиг. 4B иллюстрирует один пример состояния, при котором пользователь удерживает устройство 1 обработки информации в поперечном направлении левой рукой. Фиг. 4C иллюстрирует один пример состояния, при котором пользователь удерживает устройство 1 обработки информации в продольном направлении правой рукой. Фиг. 4D иллюстрирует один пример состояния, при котором пользователь удерживает устройство 1 обработки информации в поперечном направлении правой рукой.
При этом с помощью устройства 1 обработки информации согласно рассматриваемому варианту осуществления, как показано на фиг. 4A, 4B, 4C и 4D, пользователь может осуществлять ввод операции в результате касания переднего тактильного сенсора 16 пальцем руки, не удерживающей устройство 1 обработки информации. На фиг. 4A, 4B, 4C и 4D пользователь осуществляет ввод операции в устройство 1 обработки информации пальцем, однако, разумеется, ввод операции в устройство 1 обработки информации может быть осуществлен и с помощью стилуса или тому подобного приспособления. При этом в устройстве 1 обработки информации согласно рассматриваемому варианту осуществления, например, в случае, когда пользователь касается переднего тактильного сенсора 16, отображение информации согласно положению касания (например, информации, представляющей содержимое обработки, подлежащей исполнению в ответ на отделение пальца от иконки, отображенной в положении касания) осуществляется на дисплее 14 в положении, соответствующем положению касания. Как показано на фиг. 4A и 4B, в случае, когда устройство 1 обработки информации удерживается левой рукой пользователя, то с учетом положения на дисплее 14, соответствующего положению касания переднего тактильного сенсора 16, информация, являющаяся объектом отображения, отображается на верхнем левом участке. А, как показано на фиг. 4C и 4D, в случае, когда устройство 1 обработки информации удерживается правой рукой пользователя, то с учетом положения на дисплее 14, соответствующего положению касания переднего тактильного сенсора 16, информация, являющаяся объектом отображения, отображается на верхнем правом участке.
В устройстве 1 обработки информации согласно рассматриваемому варианту осуществления положение объекта на воспринимающая поверхности заднего тактильного сенсора 18 обнаруживается, как указано выше, с заданным временным интервалом, и оценка того, какой рукой пользователь удерживает устройство 1 обработки информации -левой или правой, осуществляется на основе положения, обнаруженного с помощью заднего тактильного сенсора 18. При этом в случае существования информации, подлежащей отображению, устройство 1 обработки информации отображает эту информацию на участке дисплея 14 согласно результату оценки.
Ниже приводится описание одного примера потока обработки по определению руки, которой пользователь удерживает устройство 1 обработки информации, исполняемой с заданным временным интервалом в устройстве 1 обработки информации согласно рассматриваемому варианту, сопровождаемое ссылками на логическую блок-схему, представленную на фиг. 5.
Прежде всего, блок 40 получения результата обнаружения получает данные, представляющие вертикальное направление, от датчика 34 направления и получает значение координат (значение координаты X и значение координаты Y), по меньшей мере, одного обнаруженного положения от заднего тактильный сенсора 18 (этап S101). Затем блок 42 определения удерживающей руки генерирует список, в котором значения координат положений, полученные в процессе обработки на этапе S101, располагаются в порядке увеличения значения координаты Y (этап S102). Затем блок 42 определения удерживающей руки подтверждает число значений координат, полученных в процессе обработки на этапе S101 (этап S103).
Затем, в случае, когда число значений координат, подтвержденное в процессе обработки на этапе S103, составляет 1 или 5 или более, блок 42 определения удерживающей руки принимает решение о значении левого/правого флага ("правого" или "левого"), поддерживаемого в блоке 44 поддержки левых/правых флагов, с использованием метода усреднения координат, описание которого приводится ниже.(этап S104). В случае, когда число значений координат, подтвержденное в процессе обработки на этапе S103, составляет 2, блок 42 определения удерживающей руки принимает решение о значении левого/правого флага, поддерживаемого в блоке 44 поддержки левых/правых флагов, с использованием метода вектора-градиента, описание которого приводится также ниже (этап S105). В случае, когда число значений координат, подтвержденное в процессе обработки на этапе S103, составляет 3 или 4, блок 42 определения удерживающей руки принимает решение о значении левого/правого флага, поддерживаемого в блоке 44 поддержки левых/правых флагов, с использованием метода внешнего произведения векторов, описание которого приводится также ниже (этап S106).
Затем блок 42 определения удерживающей руки обеспечивает поддержку в блоке 44 поддержки левых/правых флагов левого/правого флага, значение которого установлено в результате принятия решения в процессе обработки на каком-либо из этапов S104-S106, в соответствии с датой и временем обнаружения координат положения (этап S107).
В рассматриваемом примере обработки в случае, когда число значений координат, подтвержденных в процессе обработки на этапе S103, составляет 0, то принимается решение о невозможности определения левого/правого флага S108). В этом случае левый/правый флаг не поддерживается в блоке 44 поддержки левых/правых флагов.
Затем по окончании обработки на этапе S107 или на этапе S108 блок 42 определения удерживающей руки последовательно выделяет из левых/правых флагов, поддерживаемых в блоке 44 поддержки левых/правых флагов, заданное число (например, 15) левых/правых флагов, начиная с флага, соответствующего самым последним дате и времени определения. При этом в случае, когда число левых/правых флагов с установленным значением "левый" превышает число левых/правых флагов с установленным значением "правый", блок 42 определения удерживающей руки определяет, что рука, которой удерживается устройство 1 обработки информации, является левой, а в противном случае - что рука, которой удерживается устройство 1 обработки информации, является правой (этап S109).
Таким образом, в рассматриваемом варианте осуществления с заданным интервалом времени оценивается, является ли рука, которой удерживается устройство 1 обработки информации, левой или правой.
Ниже приводится подробное описание методов определения значения левого/правого флага на этапах S104-S106.
Вначале рассмотрим в деталях метод усреднения координат, реализуемый на указанном выше этапе S104. Фиг. 6A представляет собой пояснительную схему, иллюстрирующую этот метод усреднения координат в случае, когда число значений координат подтвержденных в процессе обработки на этапе S103, составляет 1. Фиг. 6B представляет собой пояснительную схему, иллюстрирующую метод усреднения координат в случае, когда число значений координат подтвержденных в процессе обработки на этапе S103, составляет 5 или более (в примере на фиг. 6B это число составляет 5).
При использовании метода усреднения координат, прежде всего, блок 46 определения направления дисплея идентифицирует величину острого угла, образуемого направлением оси X и направлением, полученным в результате проецирования вертикального направления представления данных, полученных от датчика 34 направления в процессе обработки на указанном выше этапе S101, на плоскость XY. При этом в случае, когда этот угол составляет не менее 45 градусов, блок 46 определения направления дисплея определяет, что устройство 1 обработки информации удерживается в продольном направлении, а в противном случае - что устройство 1 обработки информации удерживается в поперечном направлении. Предположим, что в примерах на фиг. 6A и 6B устройство 1 обработки информации удерживается в продольном направлении.
Как показано на фиг. 4B или 4D, в случае, когда устройство 1 обработки информации удерживается в поперечном направлении, высока вероятность ориентации направления оси X в вертикальном направлении. И наоборот, как показано на фиг. 4A или 4C, в случае, когда устройство 1 обработки информации удерживается в продольном направлении, высока вероятность ориентации направления оси Y в вертикальном направлении. Исходя из этого, как указано выше, при использовании метода усреднения координат в рассматриваемом варианте осуществления по углу, образуемому вертикальным направлением и направлением оси X, определяется, удерживается ли устройство 1 обработки информации в поперечном направлении или в продольном направлении.
В случае, когда число значений координат, подтвержденных в процессе обработки на этапе S103, составляет 1 (в примере на фиг. 6A координаты имеют значение (x0, y0)), блок 42 определения удерживающей руки определяет, является ли разность (x0-xc) между значением x0 координаты X этого значения координаты и значением xc X-координаты центра заднего тактильного сенсора 18 (координаты имеют значение (xc, yc)) нулевой, положительной или отрицательной.
Кроме того, в случае, когда число значений координат, подтвержденных в процессе обработки на этапе S103, составляет 5 или более (в примере на фиг. 6B координаты имеют значения (x0, y0), (x1, y1), (x2, y2), (x3, y3), (x4, y4)), блок 42 определения удерживающей руки определяет, определяет, является ли разность (xa-xc) между значением ха X-координаты средней точки группы положений, представленных этими значениями координат (координаты имеют значения (xa, ya), причем xa=(x0+x1+x2+x3+x4)/5, ya=(y0+y1+y2+y3+y4)/5), и значением xc X-координаты центра заднего тактильного сенсора 18, нулевой, положительной или отрицательной.
При этом в случае, когда определяется, что устройство 1 обработки информации удерживается в продольном направлении, то при нулевом или положительном значении (x0-xc) или значении (ха-xc) блок 42 определения удерживающей руки идентифицирует значение указанного выше левого/правого флага как "правый", а при отрицательном значении (x0-xc) или значении (ха-xc) - как "левый". В то же время в случае, когда определяется, что устройство 1 обработки информации удерживается в поперечном направлении, то при нулевом или положительном значении (x0-xc) или значении (ха-xc) блок 42 определения удерживающей руки идентифицирует значение указанного выше левого/правого флага как "левый", а при отрицательном значении (x0-xc) или значении (ха-xc) - как "правый". В примере на фиг. 6A значение (x0-xc) является отрицательным, и поэтому значение указанного выше левого/правого флага идентифицируется как "левый". В примере на фиг. 6B значение (ха-xc) является положительным, и поэтому значение указанного выше левого/правого флага идентифицируется как "правый".
Как указано выше, в рассматриваемом варианте осуществления при использовании метода усреднения координат значение левого/правого флага идентифицируется в зависимости от того, находится ли обнаруженное положение или положение средней точки обнаруженных положений при наблюдении со стороны передней поверхности корпуса 10 левее или правее центра заднего тактильного сенсора 18.
Кроме того, при использовании метода усреднения координат в рассматриваемом варианте осуществления в случае, когда устройство 1 обработки информации удерживается в продольном направлении, то ввиду высокой вероятности того, что при удерживании устройства 1 обработки информации левой рукой, как показано на фиг. 4A, обнаруженное положение или положение средней точки обнаруженных положений при наблюдении со стороны передней поверхности корпуса 10 находится левее центра заднего тактильного сенсора 18, определяется, что при отрицательной разности (x0-xc) или (ха-xc) флаг имеет значение "левый". В то же время ввиду высокой вероятности того, что при удерживании устройства 1 обработки информации правой рукой, как показано на фиг. 4C, обнаруженное положение или положение средней точки обнаруженных положений при наблюдении со стороны передней поверхности корпуса 10 располагается правее центра заднего тактильного сенсора 18, определяется, что при нулевой или положительной разности (x0-xc) или (ха-xc) флаг имеет значение "правый".
И наоборот, в случае, когда устройство 1 обработки информации удерживается в поперечном направлении, то ввиду высокой вероятности того, что при удерживании устройства 1 обработки информации левой рукой, как показано на фиг. 4B, обнаруженное положение или положение средней точки обнаруженных положений при наблюдении со стороны передней поверхности корпуса 10 располагается правее центра заднего тактильного сенсора 18, определяется, что при нулевой или положительной разности (x0-xc) или (ха-xc) флаг имеет значение "левый". В то же время ввиду высокой вероятности того, что при удерживании устройства 1 обработки информации правой рукой, как показано на фиг. 4D, обнаруженное положение или положение средней точки обнаруженных положений при наблюдении со стороны передней поверхности корпуса 10 располагается левее центра заднего тактильного сенсора 18, определяется, что при отрицательной разности (x0-xc) или (ха-xc) флаг имеет значение "левый".
Далее рассмотрим метод вектора-градиента, реализуемый на указанном выше этапе S105. Фиг. 6C представляет собой пояснительную схему, иллюстрирующую этот метод вектора-градиента.
В рассматриваемом случае два значения координат, образующие список, генерированный в процессе обработки на указанном выше этапе S102, задаются как (x0, y0) и (x1, y1), причем (y0<y1). При использовании метода вектора-градиента в случае, когда значение (x1-x0) является положительным или нулевым, блок 42 определения удерживающей руки идентифицирует значение указанного выше левого/правого флага как "правый", а в противном случае - как "левый". В примере на фиг. 6C значение (x1-x0) является отрицательным, и поэтому значение указанного выше левого/правого флага идентифицируется как "левый".
При использовании метода вектора-градиента в рассматриваемом варианте осуществления ввиду высокой вероятности того, что при удерживании устройства 1 обработки информации левой рукой (в особенности в случае контакта указательного пальца с кнопкой 20 на верхней поверхности) два обнаруженных положения при наблюдении со стороны передней поверхности корпуса 10 располагаются на линии, проходящей сверху вниз, слева направо, при отрицательной разности (x1-x0) значение левого/правого флага определяется как "левый". И наоборот, ввиду высокой вероятности того, что при удерживании устройства 1 обработки информации правой рукой (в особенности в случае контакта указательного пальца с кнопкой 20 на верхней поверхности) два обнаруженных положения при наблюдении со стороны передней поверхности корпуса 10 располагаются на линии, проходящей сверху вниз, справа налево, при нулевой или положительной разности (x1-x0) значение левого/правого флага определяется как "правый".
Далее рассмотрим метод внешнего произведения векторов, реализуемый на указанном выше этапе S105. Фиг. 6D представляет собой пояснительную схему, иллюстрирующую этот метод внешнего произведения векторов в случае, когда число значений координат подтвержденных в процессе обработки на этапе S103, составляет 3. А фиг. 6E представляет собой пояснительную схему, иллюстрирующую этот метод внешнего произведения векторов в случае, когда число значений координат подтвержденных в процессе обработки на этапе S103, составляет 4.
При использовании метода внешнего произведения векторов в рассматриваемом варианте осуществления в случае, когда число значений координат, подтвержденных в процессе обработки на этапе S103, составляет 3 (в рассматриваемом случае три значения координат, образующие список, генерированный в процессе обработки на указанном выше этапе S102, задаются как (x0, y0), (x1, y1) и (х2, y2), причем (y0<y1<y2)), при положительном или нулевом значении внешнего произведения между вектором (x1-x0, y1-y0) и вектором (х2-x0, y2-y0) блок 42 определения удерживающей руки идентифицирует значение указанного выше левого/правого флага как "левый", а в противном случае - как "правый". В примере на фиг. 6D значение внешнего произведения между вектором (x1-x0, y1-y0) и вектором (х2-x0, y2-y0) является положительным, и поэтому значение указанного выше левого/правого флага идентифицируется как "левый".
В случае, когда число значений координат, подтвержденных в процессе обработки на этапе S103, составляет 4 (в рассматриваемом случае четыре значения координат, образующие список, генерированный в процессе обработки на указанном выше этапе S102, задаются как (x0, y0), (x1, y1), (х2, y2) и (x3, y3), причем (y0<y1<y2<y3)), при положительном или нулевом значении внешнего произведения между вектором ((x1+х2)/2-x0, (y1+y2)/2-y0) и вектором (х3-x0, y3-y0) блок 42 определения удерживающей руки идентифицирует значение указанного выше левого/правого флага как "левый", а в противном случае - как "правый". В примере на фиг. 6Е значение внешнего произведения между вектором ((x1+х2)/2-x0, (y1+y2)/2-y0) и вектором (х3-x0, y3-y0) является отрицательным, и поэтому значение указанного выше левого/правого флага идентифицируется как "правый".
При использовании внешнего произведения векторов в рассматриваемом варианте осуществления в случае, когда число обнаруженных положений составляет 3, ввиду высокой вероятности того, что при удерживании устройства 1 обработки информации левой рукой эти три положения, последовательно соединенные одно с другим, начиная с верхнего, при наблюдении со стороны передней поверхности корпуса 10 образуют линию с выпуклостью, обращенной вправо, при положительном или нулевом значении внешнего произведения между вектором (x1-x0, y1-y0) и вектором (х2-x0, y2-y0) значение левого/правого флага определяется как "левый". И наоборот, ввиду высокой вероятности того, что при удерживании устройства 1 обработки информации правой рукой указанные выше три положения, последовательно соединенные одно с другим, начиная с верхнего, при наблюдении со стороны передней поверхности корпуса 10 образуют линию с выпуклостью, обращенной влево, при отрицательном значении внешнего произведения между вектором (x1-x0, y1-y0) и вектором (х2-x0, y2-y0) значение левого/правого флага определяется как "правый".
Кроме того, при использовании внешнего произведения векторов в рассматриваемом варианте осуществления в случае, когда число обнаруженных положений составляет 4, ввиду высокой вероятности того, что при удерживании устройства 1 обработки информации левой рукой самое верхнее положение, положение средней точки между вторым и третьим положениями, считая с верхнего, и самое нижнее положение, последовательно соединенные одно с другим, начиная с верхнего, при наблюдении со стороны передней поверхности корпуса 10 образуют линию с выпуклостью, обращенной вправо, при положительном или нулевом значении внешнего произведения между вектором ((x1+х2)/2-x0, (y1+y2)/2-y0) и вектором (х3-x0, y3-y0) значение левого/правого флага определяется как "левый". И наоборот, ввиду высокой вероятности того, что при удерживании устройства 1 обработки информации правой рукой самое верхнее положение, положение средней точки между вторым и третьим положениями, считая с верхнего, и самое нижнее положение, последовательно соединенные одно с другим, начиная с верхнего, при наблюдении со стороны передней поверхности корпуса 10 образуют линию с выпуклостью, обращенной влево, при отрицательном значении внешнего произведения между вектором ((x1+х2)/2-x0, (y1+y2)/2-y0) и вектором (х3-x0, y3-y0) значение левого/правого флага определяется как" правый".
Кроме того, в рассматриваемом варианте осуществления в случае, когда пользователь касается своим пальцем или стилусом изображения, отображенного на дисплее 14 в составе сенсорной панели 12, положение этого изображения обнаруживается с помощью переднего тактильного сенсора 16, и информация, соответствующая этому изображению (например, информация, представляющая содержимое, на которое указывает это изображение), отображается на дисплее 14. При этом положение отображения информации изменяется в зависимости от положения, обнаруженного с помощью переднего тактильного сенсора 16, и последних результатов определения в процессе обработка на описанных выше этапах S101-S109.
Ниже приводится описание обработки, исполняемой устройством 1 обработки информации согласно рассматриваемому варианту осуществления в случае касания переднего тактильного сенсора 16, для обеспечения отображения информации.
Прежде всего, блок 48 идентификации участка принимает значение координат (значение X-координаты и значение Y-координаты) обнаруженного положения от переднего тактильного сенсора 16. Затем блок 48 идентификации участка идентифицирует значение координат положения на дисплее 14 (например, значение X-координаты и значение Y-координаты, совпадающие с этим обнаруженным положением), накладывающегося на это обнаруженное положение. В рассматриваемом случае значение координат идентифицированного положения задается как (xq, yq). Кроме того, в случае, когда устройство 1 обработки информации удерживается в продольном направлении, значение координат левого нижнего угла дисплея 14 задается как (x0, y0), значение координат правого нижнего угла дисплея 14 задается как (x1, y1), значение координат левого верхнего угла дисплея 14 - как (х2, y2), а значение координат правого верхнего угла дисплея 14 - как (x3, y3).
Затем, в случае, когда последний результат определения в процессе обработки на описанных выше этапах S101-S109 указывает на левую руку, блок 48 идентификации участка идентифицирует в качестве запретного участка 52 прямоугольный участок, у которого вершины, располагающиеся одна против другой по диагонали, занимают положение со значением координат (x1, y1) и положение со значением координат (xq, yq), в качестве первого приоритетного участка 54-1 - прямоугольный участок, у которого вершины, располагающиеся одна против другой по диагонали, занимают положение со значением координат (х2, y2) и положение со значением координат (xq, yq), в качестве второго приоритетного участка 54-2 - прямоугольный участок, у которого вершины, располагающиеся одна против другой по диагонали, занимают положение со значением координат (x3, y3) и положение со значением координат (xq, yq), а в качестве третьего приоритетного участка 54-3 - прямоугольный участок, у которого вершины, располагающиеся одна против другой по диагонали, занимают положение со значением координат (x0, y0) и положение со значением координат (xq, yq). Фиг. 7A иллюстрирует один пример запретного участка 52 и приоритетных участков 54 в случае, когда последний результат определения в процессе обработке на описанных выше этапах S101-S109 указывает на левую руку. На фиг. 7A запретный участок 52 показан штриховыми линиями.
В то же время, в случае, когда последний результат определения в процессе обработки на описанных выше этапах S101-S109 указывает на правую руку, блок 48 идентификации участка идентифицирует в качестве запретного участка 52 прямоугольный участок, у которого вершины, располагающиеся одна против другой по диагонали, занимают положение со значением координат (x0, y0) и положение со значением координат (xq, yq), в качестве первого приоритетного участка 54-1 - прямоугольный участок, у которого вершины, располагающиеся одна против другой по диагонали, занимают положение со значением координат (x3, y3) и положение со значением к4оординат (xq, yq), в качестве второго приоритетного участка 54-2 - прямоугольный участок, у которого вершины, располагающиеся одна против другой по диагонали, занимают положение со значением координат (х2, y2) и положение со значением координат (xq, yq), а в качестве третьего приоритетного участка 54-3 - прямоугольный участок, у которого вершины, располагающиеся одна против другой по диагонали, занимают положение со значением координат (x1, y1) и положение со значением координат (xq, yq). Фиг. 7B иллюстрирует один пример запретного участка 52 и приоритетных участков 54 в случае, когда последний результат определения в процессе обработке на описанных выше этапах S101-S109 указывает на правую руку. На фиг. 7 В запретный участок 52 показан штриховыми линиями.
Таким образом, в рассматриваемом варианте осуществления на основе положения, обнаруженного с помощью заднего тактильного сенсора 18, один из прямоугольных участков - прямоугольный участок, у которого вершины, располагающиеся одна против другой по диагонали, занимают положение со значением координат (x1, y1) и положение со значением координат (xq, yq), или прямоугольный участок, у которого вершины, располагающиеся одна против другой по диагонали, занимают положение со значением координат (x0, y0) и положение со значением координат (xq, yq), идентифицируется в качестве запретного участка 52.
Затем блок 50 обеспечения отображения обеспечивает вывод и отображение информации, подлежащей отображению, на первом приоритетном участке 54-1 дисплея 14. При этом в с соответствии с заданным правилом блок 50 обеспечения отображения может определить, отображать ли информацию на первом приоритетном участке 54-1 или нет. Например, в случае, когда на первом приоритетном участке 54-1 уже находится отображенная информация, блок 50 обеспечения отображения может принять решение не отображать информацию на первом приоритетном участке 54-1 и обеспечить вывод и отображение информации, подлежащей отображению, на втором приоритетном участке 54-2. Точно так же, например, в случае, когда и на втором приоритетном участке 54-2 уже находится отображенная информация, блок 50 обеспечения отображения может принять решение не отображать информацию и обеспечить вывод и отображение информации, подлежащей отображению, на третьем приоритетном участке 54-3. Кроме того, в случае множества порций информации, подлежащей отображению блок 50 обеспечения отображения может обеспечить вывод и отображение этих порций информации и на первом приоритетном участке 54-1 и на втором приоритетном участке 54-2.
Как указано выше, согласно рассматриваемому варианту осуществления при определении того, что устройство 1 обработки информации удерживается левой рукой, на основе положения, обнаруженного с помощью заднего тактильного сенсора 18, в качестве запретного участка 52 устанавливается нижний правый участок дисплея 14, который с высокой вероятностью будет закрываться правой рукой, оперирующей передним тактильным сенсором 16, а при определении того, что устройство 1 обработки информации удерживается правой рукой, в качестве запретного участка 52 устанавливается нижний левый участок дисплея 14, который с высокой вероятностью будет закрываться левой рукой, оперирующей передним тактильным сенсором 16. При этом рассматриваемом варианте осуществления информация, являющаяся объектом отображения, отображается на участке дисплея 14, располагающемся за границами запретного участка 52, что позволяет предотвратить ситуацию, затрудняющую визуальный доступ пользователя к информации, являющейся объектом отображения.
Настоящее изобретение не ограничивается описанным выше вариантом осуществления.
Например, соотношение соответствия между числом значений координат, обнаруженных с помощью заднего тактильного сенсора 18, и метод определения значения левого/правого флага не ограничиваются описанными выше. Например, блок 42 определения удерживающей руки может принимать решение о значении левого/правого флага на основе комбинации результатов определения с использованием двух или более методов определения. В частности, может быть использован алгоритм, описываемый ниже. Например, при числе значений координат, обнаруженных с помощью заднего тактильного сенсора 18, составляющем 2, в случае совпадения значения левого/правого флага, идентифицированного с использованием описанного выше метода вектора-градиента, и значения левого/правого флага, идентифицированного с использованием описанного выше метода усреднения координат в зависимости от того, находится ли средняя точка этих двух значений координат левее или правее центра дисплея 14, блок 42 определения удерживающей руки принимает решение об этом значении в качестве значения левого/правого флага, а в противном случае - о невозможности определения.
Кроме того, не ограничивается описанным выше вариантом осуществления и метод установления запретного участка 52. Например, в качестве кандидатов на запретный участок 52 могут быть предварительно установлены два заданных участка дисплея 14. В частности, в качестве кандидатов на запретный участок 52 могут быть предварительно установлены, например, четверть круга заданного радиуса с центром в левом нижнем углу дисплея 14 и четверть круга заданного радиуса с центром правом нижнем углу дисплея 14. При этом в случае, когда последний результат определения в процессе обработка на описанных выше этапах S101-S109 указывает на левую руку, блок 48 идентификации участка может идентифицировать в качестве запретного участка 52 кандидата на запретный участок 52, располагающегося с правой стороны, а в случае, когда последний результат определения в процессе обработка на описанных выше этапах S101-S109 указывает на правую руку, блок 48 идентификации участка может идентифицировать в качестве запретного участка 52 кандидата на запретный участок 52, располагающегося с левой стороны.
Кроме того, в случае, когда, например, число значений координат, обнаруженных с помощью заднего тактильного сенсора 18, составляет 6 или более, блок 42 определения удерживающей руки может определить, что устройство 1 обработки информации удерживается обеими руками. При этом без установления запретного участка 52 на дисплее 14 блок 48 идентификации участка может последовательно идентифицировать участки, полученные в результате деления дисплея 14 на три участка - верхний, средний и нижний участки, начиная с верхнего участка, в качестве первого приоритетного участка 54-1, второго приоритетного участка 54-2 и третьего приоритетного участка 54-3.
Кроме того, блок 42 определения удерживающей руки может обеспечивать поддержку блоком 44 поддержки левых/правых флагов значения левого/правого флага в соответствии со значением координат, обнаруженным с помощью заднего тактильного сенсора 18 (или значением координат средней точки множества положений, обнаруженных с помощью заднего тактильного сенсора 18). Из этого следует, что при определении значения левого/правого флага с использованием описанного выше метода усреднения координат в случае, когда среднее число значений Х-координаты, соответствующих левому/правому флагу со значением "левый", меньше чем среднее число значений Х-координаты, соответствующих левому/правому флагу со значением "правый", устройство 1 обработки информации может определить удерживание устройства 1 обработки информации в продольном направлении, а в противном случае - в поперечном направлении.
Кроме того, как и в варианте осуществления, описанном выше, отсутствует необходимость определения руки, удерживающей устройство 1 обработки информации, на основе хронологии прошлых результатов определения на описанных выше этапах S104-S107, и блок 42 определения удерживающей руки может определять руку, которой удерживается устройство 1 обработки информации, на основе последнего положения, обнаруженного с помощью заднего тактильного сенсора 18.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОБРАБОТКИ ИНФОРМАЦИИ И СИСТЕМА ОБРАБОТКИ ИНФОРМАЦИИ | 2011 |
|
RU2516558C2 |
| КОДИРОВАНИЕ КОЭФФИЦИЕНТОВ И ОСТАТКА ДЛЯ КОДИРОВАНИЯ ВИДЕО | 2022 |
|
RU2834617C2 |
| КОДИРОВАНИЕ ОСТАТКОВ И КОЭФФИЦИЕНТОВ ДЛЯ КОДИРОВАНИЯ ВИДЕО | 2022 |
|
RU2824946C2 |
| СПОСОБ КОДИРОВАНИЯ ОСТАТКА И КОЭФФИЦИЕНТОВ ДЛЯ КОДИРОВАНИЯ ВИДЕО | 2022 |
|
RU2833874C2 |
| КОДИРОВАНИЕ КОЭФФИЦИЕНТОВ И ОСТАТКА ДЛЯ КОДИРОВАНИЯ ВИДЕО | 2022 |
|
RU2840333C2 |
| УСТРОЙСТВО ОБРАБОТКИ ИНФОРМАЦИИ | 2011 |
|
RU2504822C9 |
| ОСТАТОЧНОЕ КОДИРОВАНИЕ И КОДИРОВАНИЕ КОЭФФИЦИЕНТОВ ДЛЯ КОДИРОВАНИЯ ВИДЕО | 2022 |
|
RU2829115C2 |
| УСТРОЙСТВО ОБРАБОТКИ ИНФОРМАЦИИ | 2013 |
|
RU2625950C2 |
| УСТРОЙСТВО ОБРАБОТКИ ИНФОРМАЦИИ, СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ И ПРОГРАММА | 2014 |
|
RU2678481C2 |
| УСТРОЙСТВО ОБРАБОТКИ ИНФОРМАЦИИ, СИСТЕМА ОБРАБОТКИ ИНФОРМАЦИИ И СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ | 2011 |
|
RU2598598C2 |
Изобретение относится к устройствам обработки информации. Технический результат заключается в обеспечении возможности изменения положения участка дисплея, на котором информация, являющаяся объектом отображения, не отображается, в соответствии с положением, обнаруженным с помощью тактильного сенсора, размещенного напротив тактильного сенсора, размещенного с наложением на дисплей. Устройство обработки информации включает в себя сенсорную панель, содержащую дисплей и передний тактильный сенсор, размещенный с наложением на дисплей и предназначенный для обнаружения положения объекта на воспринимающей поверхности, задний тактильный сенсор, размещенный напротив переднего тактильного сенсора и предназначенный для обнаружения положения объекта на воспринимающей поверхности, а также блок управления. На основе, по меньшей мере, одного положения, обнаруженного с помощью заднего тактильного сенсора, блок управления идентифицирует в качестве запретного участка один из двух участков, каждый из которых занимает часть дисплея и которые размещены слева и справа, и обеспечивает отображение информации, являющейся объектом отображения, на участке дисплея за границами этого запретного участка. 4 н. и 7 з.п. ф-лы, 16 ил.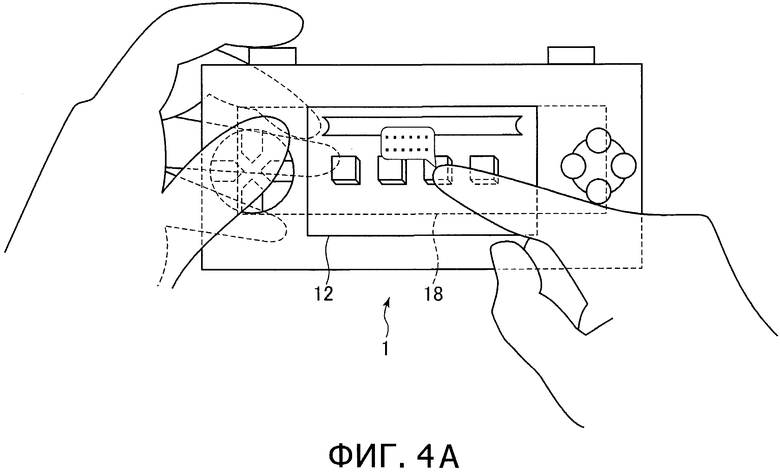
1.Устройство обработки информации, содержащее:
блок отображения;
передний тактильный сенсор, который перекрывает блок отображения и обнаруживает положение первого объекта на воспринимающей поверхности;
задний тактильный сенсор, который расположен напротив переднего тактильного сенсора и обнаруживает положение второго объекта на воспринимающей поверхности;
а также блок управления, который обеспечивает отображение информации, являющейся объектом отображения, на участке блока отображения за границами первого участка в ответ на обнаружение положения первого объекта с помощью переднего тактильного сенсора, где этот первый участок содержит один из: второй участок или третий участок,
причем на виде спереди второй участок включает в себя нижний левый угол блока отображения, а третий участок - нижний правый угол блока отображения, и
решение по каждому из: второму участку и третьему участку, принимается в зависимости от положения, которое является, по меньшей мере, одним положением, обнаруженным с помощью заднего тактильного сенсора.
2. Устройство обработки информации по п. 1, отличающееся тем, что в зависимости от того, является ли поперечное направление блока отображения направлением вдоль вертикального направления или продольное направление блока отображения является направлением вдоль вертикального направления, соотношение соответствия между положением, обнаруженным с помощью заднего тактильного сенсора, и первым участком изменяется на обратное.
3. Устройство обработки информации по п. 1, отличающееся тем, что решение по первому участку принимается на основе того, находится ли указанное одно положение, обнаруженное с помощью заднего тактильного сенсора, на участке заднего тактильного сенсора, расположенном напротив левой половины переднего тактильного сенсора, или на участке заднего тактильного сенсора, расположенном напротив правой половины переднего тактильного сенсора.
4. Устройство обработки информации по п. 3, отличающееся тем, что в случае, когда указанное одно положение, обнаруженное с помощью заднего тактильного сенсора, находится на участке заднего тактильного сенсора, расположенном напротив левой половины переднего тактильного сенсора, первый участок содержит второй участок, а в противном случае первый участок содержит третий участок.
5. Устройство обработки информации по п. 3, отличающееся тем, что дополнительно содержит датчик направления, который обнаруживает направление блока отображения,
причем на основе результата обнаружения с помощью датчика направления блок управления определяет, является ли продольное направление блока отображения направлением вдоль вертикального направления или поперечное направление блока отображения является направлением вдоль вертикального направления,
в случае, когда указанное одно положение, обнаруженное с помощью заднего тактильного сенсора, находится на участке заднего тактильного сенсора, расположенном напротив левой половины переднего тактильного сенсора, первый участок содержит второй участок, а в противном случае первый участок содержит третий участок,
и при определении того, что поперечное направление блока отображения является направлением вдоль вертикального направления, в случае, когда указанное одно положение, обнаруженное с помощью заднего тактильного сенсора, находится на участке заднего тактильного сенсора, расположенном напротив левой половины переднего тактильного сенсора, первый участок содержит третий участок, а в противном случае третий участок содержит второй участок.
6. Устройство обработки информации по п. 1, отличающееся тем, что блок управления принимает решение о положениях указанных второго и третьего участков в зависимости от положения, обнаруженного с помощью переднего тактильного сенсора.
7. Устройство обработки информации по п. 1, отличающееся тем, что в случае существования множества порций информации, являющихся объектами отображения, и упорядочивания указанного множества порций информации блок управления обеспечивает отображение указанного упорядоченного множества порций информации на множестве упорядоченных участков блока отображения, полученных в результате деления участка за границами запретного участка таким образом, что порядок информации соответствует порядку участка.
8. Устройство обработки информации по п. 1, отличающееся тем, что второй участок представляет собой прямоугольный участок, занимающий на виде спереди положение нижнего левого угла блока отображения и положение, обнаруженное с помощью переднего тактильного сенсора, в качестве вершин, располагающихся одна напротив другой по диагонали, а третий участок представляет собой прямоугольный участок, занимающий на виде спереди положение нижнего правого угла блока отображения и положение, обнаруженное с помощью переднего тактильного сенсора, в качестве вершин, располагающихся одна напротив другой по диагонали.
9. Способ управления устройством обработки информации, включающим в себя блок отображения, передний тактильный сенсор, который размещен с наложением на блоке отображения и обнаруживает положение первого объекта на воспринимающей поверхности, а также задний тактильный сенсор, который размещен напротив переднего тактильного сенсора и обнаруживает положение второго объекта на воспринимающей поверхности, где этот способ управления содержит:
этап обеспечения отображения информации, являющейся объектом отображения, на участке блока отображения за границами первого участка в ответ на обнаружение положения первого объекта с помощью переднего тактильного сенсора, где этот первый участок содержит один из: второй участок или третий участок,
причем на виде спереди второй участок включает в себя нижний левый угол блока отображения, а третий участок - нижний правый угол блока отображения, и
решение по каждому из: второму участку и третьему участку, принимается в зависимости от положения, которое является, по меньшей мере, одним положением, обнаруженным с помощью заднего тактильного сенсора.
10. Компьютер, включающий в себя блок отображения, передний тактильный сенсор, который перекрывает блок отображения и обнаруживает положение первого объекта на воспринимающей поверхности, а также задний тактильный сенсор, который расположен напротив переднего тактильного сенсора и обнаруживает положение второго объекта на воспринимающей поверхности, где этот компьютер исполняет программу, обеспечивающую осуществление этим компьютером:
этапа обеспечения отображения информации, являющейся объектом отображения, на участке блока отображения за границами первого участка в ответ на обнаружение положения первого объекта с помощью переднего тактильного сенсора, где этот первый участок содержит один из: второй участок или третий участок,
причем на виде спереди второй участок включает в себя нижний левый угол блока отображения, а третий участок - нижний правый угол блока отображения, и
решение по каждому из: второму участку и третьему участку, принимается в зависимости от положения, которое является, по меньшей мере, одним положением, обнаруженным с помощью заднего тактильного сенсора.
11. Считываемый компьютером носитель информации, на котором хранится программа для устройства обработки информации, включающего в себя блок отображения, передний тактильный сенсор, который перекрывает блок отображения и обнаруживает положение первого объекта на воспринимающей поверхности, а также задний тактильный сенсор, который расположен напротив переднего тактильного сенсора и обнаруживает положение второго объекта на воспринимающей поверхности, где эта программа обеспечивает осуществление этим устройством обработки информации:
этапа обеспечения отображения информации, являющейся объектом отображения, на участке блока отображения за границами первого участка в ответ на обнаружение положения первого объекта с помощью переднего тактильного сенсора, где этот первый участок содержит один из: второй участок или третий участок,
причем на виде спереди второй участок включает в себя нижний левый угол блока отображения, а третий участок - нижний правый угол блока отображения, и
решение по каждому из: второму участку и третьему участку, принимается в зависимости от положения, которое является, по меньшей мере, одним положением, обнаруженным с помощью заднего тактильного сенсора.
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| RU 2007111809 A, 10.10.2008 | |||
| ЭЛЕКТРОННОЕ ПОРТАТИВНОЕ УСТРОЙСТВО С КЛАВИШНОЙ ПАНЕЛЬЮ НА ЗАДНЕЙ СТОРОНЕ И ОТНОСЯЩИЙСЯ К НЕМУ СПОСОБ | 2005 |
|
RU2375763C2 |

