Изобретение относится к солнечной энергетике, конкретно для ориентации по Солнцу источников гелиоэнергетики (ИГЭ) - солнечных концентраторов и солнечных коллекторов - и может использоваться для ориентации других объектов по Солнцу или другим источникам электромагнитного излучения (ЭМИ).
К наиболее простым способам в их практической реализации относится способ пассивной ориентации по Солнцу ИГЭ. В соответствии с этим способом положение ИГЭ в азимутальной плоскости и плоскости склонения (по углу места) устанавливают посредством следящих приводов (СП) в соответствии с расчетными координатами положения Солнца, заведомо введенными в память контроллера для данного времени суток, времени года и географической широты (см. "Известия Томского политехнического университета", 2012, т. 320, №4).
Данный способ не всегда дает требуемую точность ориентации ИГЭ, особенно применительно к солнечным концентраторам. При смене географической широты объекта управления требуется перепрограммирование контроллера.
В развитие способа, изложенного выше, предложен способ ориентации источников гелиоэнергетики (см. патент US 6005236, МПК G01J/20, опубл. 21.12.1999), содержащих устройства их ориентации по азимуту и углу места. Сущность этого способа заключается в том, что предварительно осуществляют грубую ориентацию по известным координатам Солнца, введенным в память контроллера, а подстройку - по максимуму сигналов с оптических датчиков, закрепленных каждый на своей оси вращения ИГЭ. При этом ограничение предельных углов осуществляют посредством концевых выключателей следящих приводов.
Хотя коррекция ориентации ИГЭ посредством оптических датчиков повышает точность ориентации, однако сохраняется основной недостаток – необходимость перепрограммирования контроллера. Кроме того, проявляются другие недостатки, а именно:
со временем эксплуатации уменьшается точность ориентации вследствие изменения климатических и иных условий эксплуатации и износа элементов конструкции;
требуется периодическая перенастройка устройств ограничения предельных азимутальных углов.
Для ориентации ИГЭ по Солнцу предложен термический способ с использованием прямого солнечного излучения (см. патент US 7252084 В2, опубл. 07.08.2007) - прототип. В соответствии с этим способом выполняют следующие действия и операции.
В плоскости, перпендикулярной оси ориентации ИГЭ, прямое тепловое излучение Солнца преобразуют в электрические сигналы и сравнивают уровень облучения измерительного приемника в освещенной и затененной зонах. При этом по разности интенсивности теплового облучения по горизонтальной оси формируют сигнал отклонения ориентации источников гелиоэнергетики от действительного направления солнечного излучения по азимуту, а по вертикальной оси - по углу места. Сигналы отклонения ориентации ИГЭ сравнивают с порогом ограничения (чувствительности измерительного приемника), после чего по уровням сигналов отклонений формируют команды управления следящей системой:
а) при положительной полярности и уровне сигнала отклонения больше порога ограничения формируют команду на включение соответствующего двигателя СП;
б) при отрицательной полярности и уровне сигнала отклонения больше порога ограничения по абсолютной величине формируют команду на реверс соответствующего двигателя СП;
в) при уровне сигналов меньше порога ограничения (чувствительности) по абсолютной величине соответствующий привод СС переводят в ждущий режим.
Кроме того, в качестве датчиков теплового облучения в измерительном приемнике используют тепловую массу, реагирующую на изменение интенсивности облучения и находящуюся в тепловом контакте с термисторами тепловых преобразователей.
Техническое решение в соответствии с прототипом имеет следующие недостатки.
Тепловая инерция измерительного приемника теплового облучения оказывает отрицательное влияние на точность ориентации объектов управления.
В пасмурную погоду разрешающая способность приемника теплового облучения становится недостаточной для обеспечения устойчивой обратной связи следящей системы.
Задача изобретения - обеспечение устойчивой ориентации по Солнцу источников гелиоэнергетики.
В результате использования предлагаемого технического решения повышается точность и устойчивость ориентации источников гелиоэнергетики независимо от географической широты и погодных условий.
Вышеуказанный технический результат достигается тем, что в предлагаемом способе автоматической ориентации по Солнцу источников гелиоэнергетики в плоскости, перпендикулярной оси ориентации объектов управления, в двухмерной системе координат регистрируют уровень облучения приемника солнечного излучения, по разности интенсивности облучения приемника в пределах горизонтальной оси формируют сигнал отклонения объектов управления по азимуту, в пределах вертикальной оси - по углу места от действительного направления излучения, при этом при положительной полярности и уровне сигнала отклонения больше порога ограничения формируют команду на включение соответствующего двигателя следящего привода, при отрицательной полярности и уровне сигнала отклонения больше порога ограничения по абсолютной величине формируют команду на реверс соответствующего двигателя следящего привода, при уровне сигналов меньше порога ограничения по абсолютной величине соответствующий привод следящей системы переводят в ждущий режим, причем направление работы следящего привода согласуют с уменьшением соответствующих сигналов отклонения по азимуту и углу места, посредством широкополосной антенны принимают электромагнитные колебания источника излучения, отраженные рефлектором, которые снимают посредством вибратора, сканирующего в фокальной плоскости, перпендикулярной оси рефлектора, совпадающей с осью ориентации объектов управления; в спектре принятого сигнала подавляют "тепловой шум" антенно-фидерных устройств; полученный сигнал преобразуют в сигнал первой промежуточной частоты, его усиливают в широкой полосе частот и ограничивают, после чего преобразуют в сигнал второй промежуточной частоты, который усиливают в узкой полосе частот и демодулируют; огибающую сигнала второй промежуточной частоты распределяют по тактам времени в соответствии с положением вибратора относительно секторов приема, после чего формируют команды управления соответствующими следящими приводами антенны и источников гелиоэнергетики.
В способе автоматической ориентации по Солнцу источников гелиоэнергетики огибающую сигнала второй промежуточной частоты распределяют по каналам ее обработки в соответствии с длительностью тактов, составляющие огибающей усредняют в пределах такта, сохраняют, сравнивают их по уровню и обновляют, при этом: сигнал отклонения положения антенны в азимутальном направлении формируют по разности уровней усредненных составляющих огибающей, при прохождении вибратора горизонтальных секторов приема, сигнал отклонения положения антенны по углу места - при прохождении вертикальных секторов приема.
В способе автоматической ориентации по Солнцу источников гелиоэнергетики операции преобразования огибающей сигнала второй промежуточной частоты в каналах обработки поочередно сдвигают на один такт.
Технический результат достигается также тем, что в предлагаемом контуре управления следящей системой, содержащем объект слежения, объекты управления следящей системы, включающие по числу объектов управления следящие приводы по азимуту и углу места, устройство формирования команд управления следящими приводами, который дополнительно содержит: направленную антенну, приемник электромагнитных колебаний, включающий приемный сканер с датчиками положения, устройство подавления теплового шума антенны и фидерных устройств и электрически связанного с высокочастотным генератором; при этом к выходу устройства подавления теплового шума последовательно включены: первый преобразователь частоты, широкополосный усилитель, ограничитель сигнала снизу, второй преобразователь частоты, узкополосный усилитель, демодулятор, распределитель, устройство формирования команд управления, причем, первый вход распределителя присоединен к выходу демодулятора, второй его вход связан с датчиками положения сканера, а выходы распределителя присоединены к соответствующим входам устройства формирования команд, два выхода которого связаны со следящими приводами.
Сущность предлагаемого изобретения поясняется фиг. 1 - фиг. 11.
На фиг. 1 представлена общая схема контура управления следящей системой.
Фиг. 2 отображает картину распределения плотности электромагнитного излучения (ЭМИ) Солнца, отраженного от рефлектора, когда направление излучения в плоскости по углу места совпадает с осью рефлектора параболической антенны.
На фиг. 3 - то же, при отклонении направления ЭМИ на минус 5° от направления оси рефлектора, принимая за положительное - направление по часовой стрелке.
На фиг. 4 и фиг. 5 изображены диаграммы распределения плотности отраженного ЭМИ при отклонении потока ЭМИ источника излучения (Солнца) от оси рефлектора на ±5° по азимуту и углу места соответственно.
Процедура преобразования спектра ЭМИ отражена на фиг. 6.
Примерная форма сигнала второй промежуточной частоты показана на фиг. 7, а огибающая этого сигнала - на фиг. 8.
На фиг. 9 схематично показано размещение датчиков положения вибратора в фокальной плоскости антенны.
На фиг. 10 представлена диаграмма распределения огибающей сигнала второй промежуточной частоты по тактам приема.
Результаты обработки приемного сигнала отражены на фиг. 11, в виде уровней напряжения, отражающего отклонение ориентации по азимуту (фиг. 11, а) и по углу места (фиг. 11, b).
Контур управления следящей системой за Солнцем содержит: антенну, включающую рефлектор 1, вибратор 2 и сканер 3, устройство подавления теплового шума 4, высокочастотный генератор 5, первый преобразователь частоты 6, широкополосный усилитель 7, ограничитель 8, второй преобразователь частоты 9, узкополосный усилитель 10, демодулятор 11, распределительное устройство 12, устройство формирования команд 13, объекты управления 14 со следящими приводами по азимуту 15 и углу места 16.
В основе предложенного технического решения для автоматической ориентации источников гелиоэнергетики (ИГЭ) используется электромагнитное излучение Солнца, действующее в самом широком спектре частот. Следовательно, первоначальная задача сводится к выделению спектра частот, пригодного для обработки сигнала, несущего информацию об ориентации антенны по отношению к угловым координатам Солнца.
Как известно, при использовании параболической антенны электромагнитное излучение (ЭМИ) отражается от рефлектора 1 по законам оптики. При направлении оси антенны на Солнце отраженное излучение сосредотачивается в области фокуса антенны (фиг. 2). Здесь отраженное ЭМИ имеет наибольшую плотность потока и, следовательно, наибольшую спектральную плотностью, что важно для выделения полезного спектра частот.
Отклонение направления солнечного излучения от оси антенны приводит к искажению диаграммы спектральной плотности ЭМИ. Например, при угле отклонения минус 5° спектральная плотность в вертикальной плоскости распределяется, как показано на фиг. 3. Очевидно, в трехмерной системе координат распределение спектральной плотности имеет область, ограниченную усеченным конусом и полусферой, где плотность потока мала и в основном определяется прямым ЭМИ Солнца и других звезд и отраженным ЭМИ, обусловленным искажением геометрии рефлектора и шероховатостью его внутренней поверхности.
На фиг. 4 и фиг. 5 изображены диаграммы спектральной плотности ЭМИ, показывающие, что с изменением угла падения солнечного излучения диаграмма распределения спектральной плотности деформируется. Причем положение оси симметрии m-n спектральной плотности в пространстве всегда следует за углом падения.
Положение вибратора 2 в фокальной плоскости (см. фиг 1) под действием сканера 3 непрерывно меняется с частотой вращения сканера Ω. При деформации отраженного ЭМИ, вследствие изменения его спектральной плотности, изменяется во времени и уровень принятого сигнала. В результате принятый сигнал при отсутствии его ограничения по амплитуде претерпевает амплитудную модуляцию с частотой вращения сканера.
При облучении антенны Солнцем на вибраторе 2 возбуждаются электрические колебания, спектр частот которых содержится в ЭМИ Солнца в пределах раскрыва антенны, а также "белый шум", вызванный нагревом внутренней поверхности антенны выше абсолютного нуля. Чтобы частично подавить спектральные составляющие "белого шума", в контуре управления (фиг. 1) применяется устройство подавления шума 4*)(*) здесь и ниже индексы спектров относятся к порядковому номеру обозначения блоков (см. фиг. 1)). Для этого могут использоваться лампа бегущей волны (ЛБВ), квадруполь Адлера, туннельные диоды и др.
Спектр частот S4 сигнала (фиг. 6, а), полученного на выходе устройства 4, подвергается преобразованию на частоте f1 первого гетеродина. Продукт преобразования - две полосы спектра частот S6, расположенных симметрично относительно частоты f1 (фиг. 6, b), из которых полезной является полоса спектра нижних частот S7.
В спектре S7 содержатся: спектральные составляющие ЭМИ, принятые антенной и смещенные в область более низких частот, составляющие шума, имеющие место при приеме и предварительной обработке сигнала, а также различного рода помехи, вызванные, например, работой сканера. Кроме того, при работе сканера 4 и отклонении оси антенны от направления излучения Солнца появляются боковые составляющие полезного сигнала (спектральных составляющих ЭМИ), вызванные его амплитудной модуляцией (на фиг. 6, а) - 6, d) не показаны).
Выделение спектральных составляющих S7 нижней полосы частот (подавление верхней полосы частот) обеспечивается первым усилителем промежуточной частоты 7, нагруженным на широкополосный фильтр (фиг. 6, с).
С целью уменьшения вредных составляющих сигнала, последний подвергается ограничению снизу посредством устройства 8. Очевидно, уровень ограничения сигнала определяет и уровень чувствительности контура управления следящей системой.
Второе преобразование сигнала осуществляется посредством преобразователя 9 на частоте второго гетеродина f2<f1 (фиг. 6, d). Выделение спектра S10 в нижней полосе частот преобразователя 8 (фиг. 7, е) осуществляется посредством второго усилителя промежуточной частоты 10, нагруженного на узкополосный фильтр, роль которого выполняет высокодобротный колебательный контур.
В демодуляторе 11 известными способами детектирования выделяется огибающая амплитудно-модулированного сигнала. В результате на выходе возникает медленно меняющееся напряжение (огибающая сигнала S10) с периодом, соответствующим скорости вращения сканера 3 и, следовательно, вибратора 2.
Огибающая сигнала S10, полученная на выходе демодулятора 11, в устройстве 12 распределяется по каналам обработки огибающей в соответствии с сигналами датчиков положения вибратора (см. фиг. 9). Распределение огибающей осуществляется следующим образом.
За полный оборот сканера съем отраженного ЭМИ осуществляется за четыре такта, привязанных к соответствующим секторам приема, отраженного ЭМИ в фокальной плоскости антенны (фиг. 9). В устройстве 12 в каждый такт работы сканера выделяется только та часть огибающей сигнала S10, которая соответствует данному сектору приема (фиг. 10а-е) и каналу обработки огибающей. Иначе, огибающая сигнала S10 раскладывается по каналам обработки в соответствии со временем перемещения вибратора соответствующих секторов приема. Конструктивно достигаются равенства длительностей тактов: t1=t3 и t2=t4.
Полученные дискретные составляющие огибающей транслируются по четырехпроходной линии связи на входы устройства 13 формирования команд. За период вращения сканера в каждом канале этого устройства выполняются операции: усреднение дискретной составляющей огибающей в пределах соответствующего такта, сохранение уровня напряжения полученного сигнала, сравнение уровней сигналов, соответствующих противоположным секторам приема, и обновление дискретной составляющей огибающей. Перечисленные операции в каждом канале обработки последовательно сдвигаются на один такт.
При сравнении сигналов e1 и е3 (секторы 1 и 3) формируется команда активизации следящих приводов в азимутальной плоскости, при сравнении сигналов е2 и e4 (секторы 2 и 4) - по углу места (фиг. 11).
Таким образом, предложенный способ управления следящей системой основан на использовании электромагнитного излучения Солнца и сводится к установлению такой ориентации антенны, при которой электромагнитное излучение, отраженное рефлектором, сосредотачивается в фокусе антенны. При этом ориентация ИГЭ осуществляется синхронно с ориентацией приемной антенны.
| название | год | авторы | номер документа |
|---|---|---|---|
| СОЛНЕЧНАЯ ЭНЕРГОУСТАНОВКА | 2013 |
|
RU2548244C2 |
| СОЛНЕЧНЫЙ ДОМ | 2021 |
|
RU2755204C1 |
| УСТРОЙСТВО ОРИЕНТИРОВАНИЯ СОЛНЕЧНОЙ БАТАРЕИ | 2019 |
|
RU2723786C1 |
| Гелиоустановка | 1990 |
|
SU1749645A1 |
| Радиолокационная станция кругового обзора "Резонанс" | 2015 |
|
RU2624736C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАДИОТЕХНИЧЕСКИХ ХАРАКТЕРИСТИК КРУПНОГАБАРИТНЫХ АНТЕНН ДЛЯ КОСМИЧЕСКИХ АППАРАТОВ БЕЗ ИХ НЕПОСРЕДСТВЕННЫХ ИЗМЕРЕНИЙ | 2013 |
|
RU2541206C2 |
| Космическая система обзора небесной сферы для обнаружения небесных тел | 2015 |
|
RU2621464C1 |
| Солнечный энергетический модуль, встроенный в фасад здания | 2021 |
|
RU2762310C1 |
| Система для измерения солнечных спектров атмосферы | 2022 |
|
RU2789993C1 |
| ПРИЗЕМНАЯ АНТЕННА КРУГОВОГО ОБЗОРА И СПОСОБ РЕАЛИЗАЦИИ МНОГОФУНКЦИОНАЛЬНОГО НАГРЕВНОГО СТЕНДА | 2020 |
|
RU2772933C2 |
Изобретение относится к солнечной энергетике и предназначено для для ориентации по Солнцу источников гелиоэнергетики и других источников электромагнитного излучения (ЭМИ). Технический результат – повышение точности и устойчивости ориентации источников гелиоэнергетики независимо от географической широты и погодных условий. Для этого в способе ориентации посредством направленной антенны принимают электромагнитные колебания, излучаемые Солнцем и отраженные рефлектором, которые снимают посредством вибратора, сканирующего в фокальной плоскости антенны, перпендикулярной оси рефлектора. В спектре принятого сигнала подавляют тепловой шум антенно-фидерных устройств. Полученный сигнал преобразуют в сигнал в узкой полосе частот и выделяют огибающую этого сигнала, которую распределяют по тактам времени в соответствии с положением вибратора относительно секторов приема. Сигнал отклонения положения антенны в азимутальном направлении формируют по разности уровней усредненных составляющих огибающей, при прохождении вибратора горизонтальных секторов приема, сигнал отклонения положения антенны по углу места - при прохождении вертикальных секторов приема. 2 н. и 2 з.п. ф-лы, 11 ил.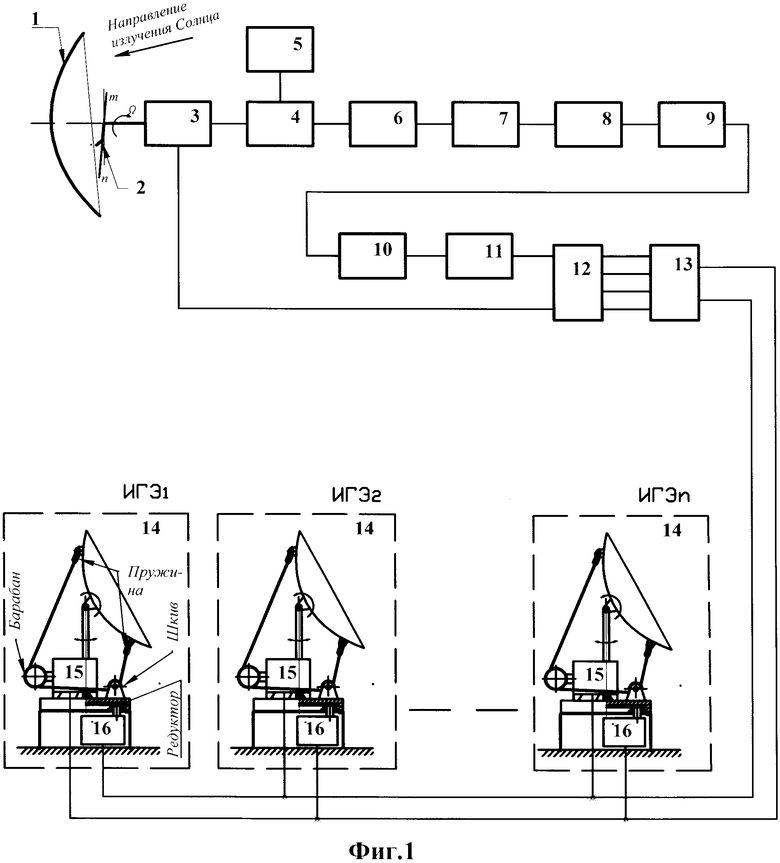
1. Способ автоматической ориентации объектов управления по источнику электромагнитного излучения, согласно которому в плоскости, перпендикулярной оси ориентации объектов управления, в двухмерной системе координат регистрируют уровень облучения приемника солнечного излучения, по разности интенсивности облучения приемника в пределах горизонтальной оси формируют сигнал отклонения объектов управления по азимуту, в пределах вертикальной оси - по углу места от действительного направления излучения, при этом: при положительной полярности и уровне сигнала отклонения больше порога ограничения формируют команду на включение соответствующего двигателя следящего привода; при отрицательной полярности и уровне сигнала отклонения больше порога ограничения по абсолютной величине формируют команду на реверс соответствующего двигателя следящего привода; при уровне сигналов меньше порога ограничения по абсолютной величине соответствующий привод следящей системы переводят в ждущий режим; причем направление работы следящего привода согласуют с уменьшением соответствующих сигналов отклонения по азимуту и углу места, отличающийся тем, что посредством широкополосной антенны принимают электромагнитные колебания источника излучения, отраженные рефлектором, которые снимают посредством вибратора, сканирующего в фокальной плоскости, перпендикулярной оси рефлектора, совпадающей с осью ориентации объектов управления; в спектре принятого сигнала подавляют "тепловой шум" антенно-фидерных устройств; полученный сигнал преобразуют в сигнал первой промежуточной частоты, его усиливают в широкой полосе частот и ограничивают, после чего преобразуют в сигнал второй промежуточной частоты, который усиливают в узкой полосе частот и демодулируют; огибающую сигнала второй промежуточной частоты распределяют по тактам времени в соответствии с положением вибратора относительно секторов приема, после чего формируют команды управления соответствующими следящими приводами антенны и источников гелиоэнергетики.
2. Способ по п. 1, отличающийся тем, что огибающую сигнала второй промежуточной частоты распределяют по каналам ее обработки в соответствии с длительностью тактов, составляющие огибающей усредняют в пределах такта, сохраняют, сравнивают их по уровню и обновляют, при этом: сигнал отклонения положения антенны в азимутальном направлении формируют по разности уровней усредненных составляющих огибающей, при прохождении вибратора горизонтальных секторов приема, сигнал отклонения положения антенны по углу места - при прохождении вертикальных секторов приема.
3. Способ по п. 1 или 2, отличающийся тем, что операции преобразования огибающей сигнала второй промежуточной частоты в каналах обработки поочередно сдвигают на один такт.
4. Контур управления следящей системой, содержащий объект слежения, объекты управления следящей системы, включающие по числу объектов управления следящие приводы по азимуту и углу места, устройство формирования команд управления следящими приводами, отличающийся тем, что дополнительно содержит: направленную антенну, приемник электромагнитных колебаний, включающий приемный сканер с датчиками положения, устройство подавления теплового шума антенны и фидерных устройств и электрически связанного с высокочастотным генератором; при этом к выходу устройства подавления теплового шума последовательно включены: первый преобразователь частоты, широкополосный усилитель, ограничитель сигнала снизу, второй преобразователь частоты, узкополосный усилитель, демодулятор, распределитель, устройство формирования команд управления, причем первый вход распределителя присоединен к выходу демодулятора, второй его вход связан с датчиками положения сканера, а выходы распределителя присоединены к соответствующим входам устройства формирования команд, два выхода которого связаны со следящими приводами.
| US 7252084 B2, 07.08.2007 | |||
| СПОСОБ ТЕРМОПРЕОБРАЗОВАНИЯ СОЛНЕЧНОЙ ЭНЕРГИИ | 2002 |
|
RU2267061C2 |
| Устройство для крепления съемных лопастей гребных винтов | 1960 |
|
SU135779A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| ГАЗОРАЗРЯДНАЯ ЛАМПА | 2006 |
|
RU2402835C2 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |

