ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к беспроводной системе связи, и, более конкретно, к способу и устройству для доступа к каналу в системе беспроводной локальной сети (WLAN).
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Различные системы технологий беспроводной связи были разработаны с бурным развитием информационно-коммуникационных технологий. Технология WLAN из числа беспроводных коммуникационных технологий позволяет выполнять беспроводной доступ в Интернет дома или на предприятиях или в конкретном регионе предоставления услуги с использованием мобильных терминалов, таких как персональный цифровой помощник (PDA), портативный компьютер, портативный мультимедийный плеер (PMP) и т.д. на основе радиочастотной (RF) технологии.
Для обхода ограничений скорости передачи, одного из недостатков технологии WLAN, в недавнем техническим стандарте была предложена усовершенствованная система, способная увеличить скорость и надежность сети при одновременном расширении области покрытия беспроводной сети. Например, IEEE 802.11n обеспечивает скорость обработки данных для поддержки максимальной пропускной способности (HT) 540 Мбит/с. Кроме того, технология MIMO (множества входов - множества выходов) в последнее время стала применяться как на передающей стороне, так и на приемной стороне, чтобы минимизировать ошибки передачи, а также оптимизировать скорость передачи данных.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ЗАДАЧА
Соответственно, настоящее изобретение направлено на способ и устройство для передачи и приема кадра, включающего в себя идентификатор частичной ассоциации (PAID) в системе WLAN, которое главным образом устраняет одну или более проблем из-за ограничений и недостатков связанного уровня техники. Технология межмашинной связи (M2M) рассматривается как технология связи следующего поколения. Технический стандарт для поддержки связи M2M в IEEE 802.11 WLAN был разработан как IEEE 802.11ah. Связь M2M может иногда рассматривать сценарий с возможностью передачи небольшого количества данных на низкой скорости в среде, включающей в себя большое число устройств.
Целью настоящего изобретения является предоставить новый способ эффективного управления вектором распределения сети (NAV), чтобы увеличить эффективность доступа к каналу.
Следует понимать, что технические цели, предназначенные для достижения посредством настоящего изобретения, не ограничиваются вышеупомянутыми техническими целями и другими техническими целями, которые не упоминаются здесь, и станут ясны из последующего описания специалисту в данной области техники, к которой настоящее изобретение принадлежит.
ТЕХНИЧЕСКОЕ РЕШЕНИЕ
Упомянутая цель настоящего изобретения может быть достигнута посредством предоставления способа управления вектором распределения сети (NAV) посредством станции (STA) в системе беспроводной локальной сети (WLAN), включающий в себя этапы: прием кадра окончания бессостязательного периода (CF-END), включающего в себя поле длительности; если CF-END кадр является CF-END кадром первого типа, то осуществляется возвращение в исходное состояние упомянутого вектора NAV; и если CF-END кадр является CF-END кадром второго типа, то осуществляется определение того, возвращать ли в исходное состояние упомянутый NAV в соответствии с результатом сравнения между значением поля длительности и значением NAV станции STA.
В другом аспекте настоящего изобретения, станция (STA) для управления вектором распределения сети (NAV) посредством станции (STA) в системе WLAN, включает в себя: приемопередатчик; и процессор, при этом процессор принимает кадр окончания бессостязательного периода (CF-END) кадр, включающий в себя поле длительности, через упомянутый приемопередатчик; если CF-END кадр является CF-END кадром первого типа, то осуществляется возвращение в исходное состояние упомянутого вектора NAV; и если CF-END кадр является CF-END кадром второго типа, то осуществляется определение того, возвращать ли в исходное состояние упомянутый вектор NAV в соответствии с результатом сравнения между значением поля длительности и значением NAV станции STA.
Следующее описание может обычно применяться к вариантам осуществления настоящего изобретения.
Поле длительности первого типа CF-END кадра может устанавливаться на нулевое (0) значение.
Поле длительности второго типа CF-END кадр может устанавливаться на ненулевое значение.
Если значение, указываемое посредством поля длительности CF-END кадра второго типа отличается от значения NAV станции STA, то станция STA может отбрасывать упомянутый CF-END кадр.
Если значение, указываемое посредством поля длительности CF-END кадра второго типа, является идентичным значению NAV станции STA, то станция STA может возвращать в исходное состояние упомянутый вектор NAV.
Если значение, указываемое посредством поля длительности CF-END кадра второго типа, является идентичным значению NAV станции STA, то станция STA может возвращать в исходное состояние упомянутый вектор NAV и может пытаться выполнить доступ к каналу.
Если значение, указываемое посредством поля длительности CF-END кадра второго типа, отличается от любого значения из предварительно определенного диапазона на основе значения NAV станции STA, то станция STA может отбрасывать упомянутый CF-END кадр.
Если значение, указываемое посредством поля длительности CF-END кадра второго типа, является идентичным для любого значения из предварительно определенного диапазона на основе значения NAV станции STA, то станция STA может возвращать в исходное состояние упомянутый вектор NAV.
Если значение, указываемое посредством поля длительности CF-END кадра второго типа, является идентичным любому значению из предварительно определенного диапазона на основе значения NAV станции STA, то станция STA может возвращать в исходное состояние упомянутый вектор NAV и может пытаться выполнить доступ к каналу.
Упомянутое значение из предварительно определенного диапазона может выбираться из диапазона от значения NAV – дельта до значения NAV + дельта, при этом дельта является натуральным числом.
Следует понимать, что как предшествующее общее описание, так и следующее подробное описание настоящего изобретения являются примерными и пояснительными и предназначены, чтобы предоставить дальнейшее пояснение настоящего изобретения, как заявлено.
ПОЛОЖИТЕЛЬНЫЕ ЭФФЕКТЫ
Как очевидно из приведенного выше описания, примерные варианты осуществления настоящего изобретения могут предоставлять новый способ эффективного управления вектором распределения сети (NAV) таким образом, чтобы увеличить эффективность доступа к каналу.
Будет очевидно специалистам в данной области техники, что упомянутые эффекты, которые могут быть достигнуты с помощью настоящего изобретения, не ограничиваются тем, что было в частности описано выше и другие преимущества настоящего изобретения будут более ясно понятны из следующего подробного описания, взятого в сочетании с прилагаемыми чертежами.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
Прилагаемые чертежи, которые включаются, чтобы предоставить дальнейшее понимание настоящего изобретения, иллюстрируют варианты осуществления настоящего изобретения и вместе с упомянутым описанием служат для пояснения принципов настоящего изобретения.
Фиг. 1 примерно изображает IEEE 802.11 систему в соответствии с одним вариантом осуществления настоящего изобретения.
Фиг. 2 примерно изображает IEEE 802.11 систему в соответствии с другим вариантом осуществления настоящего изобретения.
Фиг. 3 примерно изображает IEEE 802.11 систему в соответствии с еще одним вариантом осуществления настоящего изобретения.
Фиг. 4 является концептуальной графической схемой, иллюстрирующей WLAN систему.
Фиг. 5 является блок-схемой, иллюстрирующей процесс установления линии связи для использования в WLAN системе.
Фиг. 6 является концептуальной графической схемой, иллюстрирующей процесс отсрочки.
Фиг. 7 является концептуальной графической схемой, иллюстрирующей скрытый узел и открытый узел.
Фиг. 8 является концептуальной графической схемой, иллюстрирующей RTS (Запрос на передачу) и CTS (Готовность к передаче).
Фиг. 9 является концептуальной графической схемой, иллюстрирующей операцию управления энергопотреблением.
Фигуры с Фиг. 10 по Фиг. 12 являются концептуальными графическим схемами, иллюстрирующим подробные операции станции (STA), получившей карту индикации трафика (TIM).
Фиг. 13 является концептуальной графической схемой, иллюстрирующей структуру кадра для использования в IEEE 802.11.
Фиг. 14 является концептуальной графической схемой, иллюстрирующей пример усечения TXOP.
Фиг. 15 является концептуальной графической схемой, иллюстрирующей AID на основе групп.
Фиг. 16 является концептуальной графической схемой, иллюстрирующей доступ к каналу на основе групп.
Фиг. 17 является концептуальной графической схемой, иллюстрирующей примерный формат информационного элемента (IE) набора параметров окна RAW.
Фиг. 18 является концептуальной графической схемой, иллюстрирующей схему усечения TXOP в соответствии с одним вариантом осуществления настоящего изобретения.
Фиг. 19 является концептуальной графической схемой, иллюстрирующей схему усечения TXOP в соответствии с другим вариантом осуществления настоящего изобретения.
Фиг. 20 является концептуальной графической схемой, иллюстрирующей схему усечения TXOP в соответствии с другим вариантом осуществления настоящего изобретения.
Фиг. 21 является концептуальной графической схемой, иллюстрирующей схему усечения TXOP в соответствии с другим вариантом осуществления настоящего изобретения.
Фиг. 22 является блок-схемой, иллюстрирующей способ управления вектором NAV в соответствии с одним примером настоящего изобретения.
Фиг. 23 является блок-схемой, иллюстрирующей радиочастотное (RF) устройство в соответствии с одним вариантом осуществления настоящего изобретения.
ОПТИМАЛЬНЫЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
Далее будет сделана подробная ссылка на предпочтительные варианты осуществления настоящего изобретения, примеры которых проиллюстрированы на прилагаемых чертежах. Подробное описание, которое будет дано ниже со ссылкой на упомянутые прилагаемые чертежи, предназначено для того, чтобы пояснить примерные варианты осуществления настоящего изобретения, а не показать только варианты осуществления, которые могут осуществляться в соответствии с настоящим изобретением. Последующее подробное описание включает в себя конкретные детали для того, чтобы предоставить полное понимание настоящего изобретения. Однако, как будет понятно специалистам в данной области техники, настоящее изобретение может осуществляться на практике без таких конкретных деталей.
Следующие варианты осуществления предлагаются путем объединения составляющих компонентов и характеристик настоящего изобретения в соответствии с предварительно определенным форматом. Отдельные составляющие компоненты или характеристики следует рассматривать дополнительными факторами при условии, что не существует какого-либо дополнительного замечания. Если требуется, отдельные составляющие компоненты или характеристики могут не сочетаться с другими компонентами или характеристиками. В дополнение, некоторые составляющие компоненты и/или характеристики могут объединяться для осуществления упомянутых вариантов осуществления настоящего изобретения. Порядок операций, подлежащих раскрытию в вариантах осуществления настоящего изобретения, может быть изменен. Некоторые компоненты или характеристики какого-либо варианта осуществления могут также включаться в другие варианты осуществления, или могут замещаться компонентами или характеристиками других вариантов осуществления по мере необходимости.
Следует отметить, что конкретные термины, раскрываемые в настоящем изобретении, предлагаются для удобства описания и лучшего понимания настоящего изобретения, и использование этих конкретных терминов может быть изменено на другие форматы в пределах технического объема или сущности настоящего изобретения.
В некоторых примерах, хорошо известные структуры и устройства опускаются для того, чтобы предотвратить неопределенность концепций настоящего изобретения, а важные функции структур и устройств изображаются в форме блок-схем. Одни и те же ссылочные номера будут использоваться по всем чертежам для ссылки на такие же или подобные части.
Примерные варианты осуществления настоящего изобретения поддерживаются стандартными документами, раскрывающими по меньшей мере одну из систем беспроводного доступа, включающую в себя систему IEEE (Институт инженеров по электротехнике и электронике) 802, систему Партнерского проекта по системам 3-го поколения (3GPP), систему долговременного усовершенствования Партнерского проекта по системам 3-го поколения (LTE), развитую систему LTE (LTE-Advanced, LTE-A), и систему 3GPP2. В частности, этапы или части, которые не описываются для ясного открытия технической идеи настоящего изобретения, в упомянутых вариантах осуществления настоящего изобретения могут поддерживаться упомянутыми выше документами. Вся терминология, используемая здесь, может поддерживаться по меньшей мере одним из упомянутых выше документов.
Следующие варианты осуществления настоящего изобретения могут применяться к разнообразным технологиям беспроводного доступа, например, множественный доступ с кодовым разделением (CDMA), множественный доступ с частотным разделением (FDMA), множественный доступ с временным разделением (TDMA), множественный доступ с ортогональным частотным разделением (OFDMA), множественный доступ с частотным разделением с одной несущей (SC-FDMA) и т.п.
Технология CDMA может осуществляться через беспроводную (или радио) технологию, такую как универсальный наземный радио доступ (UTRA) или технологию CDMA2000. Технология TDMA может осуществляться через беспроводную (или радио) технологию, такую как глобальная система мобильной связи (GSM)/пакетная радиослужба общего назначения (GPRS)/расширенные скорости передачи данных для усовершенствования глобальной системы мобильной связи (EDGE). Технология OFDMA может осуществляться через беспроводную (или радио) технологию, такую как технология IEEE (Институт инженеров по электротехнике и электронике) 802.11 (Wi-Fi), IEEE 802.16 (WiMAX), IEEE 802-20, и усовершенствованная технология универсального наземного радио доступа (E-UTRA). Для ясности, последующее описание фокусируется на системах IEEE 802.11. Однако технические функциональные возможности настоящего изобретения не ограничиваются этим.
СТРУКТУРА WLAN СИСТЕМЫ
Фиг. 1 примерно изображает IEEE 802.11 систему в соответствии с одним вариантом осуществления настоящего изобретения.
Упомянутая структура IEEE 802.11 системы может включать в себя множество компонентов. Сеть WLAN, которая поддерживает прозрачную мобильность станции STA для более высокого уровня, может предоставляться посредством взаимных операций упомянутых компонентов. Базовый служебный набор (BSS) может соответствовать базовому составному блоку в сети IEEE 802.11 LAN. На Фиг. 1, два набора BSS (BSS 1 и BSS2) показаны и две станции STA включаются в каждый из наборов BSS (например, станции STA1 и STA2 включаются в набор BSS1, и станции STA3 и STA4 включаются в набор BSS2). Эллипс, указывающий набор BSS на Фиг. 1, может пониматься как область покрытия, в которой станции (STA), включаемые в соответствующий набор BSS, поддерживают соединение. Эта область может называться как базовая служебная область (BSA). Если станция STA перемещается вне области BSA, то станция STA не может напрямую связываться с другими станциями (STA) в соответствующей области BSA.
В сети IEEE 802.11 LAN, наиболее базовым типом набора BSS является независимый набор BSS (IBSS). Например, набор IBSS может иметь минимальную форму, состоящую только из двух станций (STA). Упомянутый набор BSS (BSS1 или BSS2) Фиг. 1, который является простейшей формой и в котором другие компоненты пропущены, может соответствовать типичному примеру набора IBSS. Такая конфигурация является возможной, когда станции (STA) могут напрямую связываться друг с другом. Такой тип сети LAN не планируется предварительно и может конфигурироваться, когда сеть LAN является необходимой. Это может называться как самоорганизующаяся сеть.
Принадлежащие станции (STA) в упомянутом наборе BSS могут динамически изменяться, когда станция STA включается или выключается или станция STA перемещается в или покидает область упомянутого набора BSS. Станция STA может использовать процесс синхронизации для присоединения к упомянутому набору BSS. Для доступа ко всем службам BSS инфраструктуры, станция STA должна быть ассоциирована с упомянутым набором BSS. Такое ассоциирование может динамически конфигурироваться и может включать в себя использование службы системы распределения (DSS).
Фиг. 2 является схемой, изображающей другую примерную структуру IEEE 802.11 системы, для которой применимо настоящее изобретение. На Фиг. 2, компонты, такие как система распределения (DS), среда системы распределения (DSM) и точка доступа (AP) добавляются к упомянутой структуре Фиг. 1.
Прямое расстояние от станции к станции (STA-to-STA) в сети LAN может ограничиваться характеристиками физического уровня (PHY). В некоторых случаях, такое ограничение расстояния может быть достаточным для связи. Однако, в других случаях, связь между станциями (STA) на длинном расстоянии может быть необходима. Система DS может конфигурироваться для поддержки расширенного покрытия.
Система DS относится к структуре, в которой наборы BSS связаны друг с другом. В особенности, набор BSS может конфигурироваться как компонент расширенной формы сети, представляющей собой множество наборов BSS, вместо независимой конфигурации, как показано на Фиг. 1.
Система DS является логической концепцией и может быть задана посредством характеристик среды DSM. По отношению к этому, беспроводная среда (Wireless Medium, WM) и среда DSM логически различаются в стандарте IEEE 802.11. Соответствующая логическая среда используется для различных целей и используется посредством различных компонент. В определении стандарта IEEE 802.11, такая среда не ограничивается той же или другой средой. Гибкость архитектуры сети LAN стандарта IEEE 802.11 (архитектура DS или другие сетевые архитектуры) может быть объяснена в том, что множество среды является логически различным. То есть архитектура сети LAN стандарта IEEE 802.11 может осуществляться различным образом и может независимо определяться посредством физических характеристик каждого осуществления.
Система DS может поддерживать мобильные устройства посредством предоставления цельной интеграции нескольких наборов BSS и предоставления логических служб, необходимых для управления адресом к пункту назначения.
Точка доступа (AP) относится к объекту, который позволяет связанным станциям (STA) получать доступ к системе DS через среду WM и который имеет функциональные возможности станции (STA). Данные могут перемещаться между упомянутым набором BSS и упомянутой системой DS через упомянутую точку доступа AP. Например, станция STA2 и станция STA3, изображенные на Фиг. 2, имеют функциональные возможности станции (STA) и предоставляют функцию, вызывающую связанные станции (STA1 и STA4) получить доступ к системе DS. Кроме того, поскольку все точки доступа (AP) соответствуют в основном станциям (STA), все точки доступа (AP) являются адресуемыми объектами. Не требуется, чтобы адрес, используемый точкой доступа (AP) для связи на среде WM, был всегда идентичным адресу, используемому посредством точки доступа (AP) для связи на среде DSM.
Данные, передаваемые от одной из станций (STA), связанных с точкой доступа (AP), на адрес станции (STA) точки доступа (AP) могут всегда приниматься посредством неконтролируемого порта и могут обрабатываться посредством IEEE 802.1X объекта доступа порта. Если контролируемый порт прошел аутентификацию, то данные передачи (или кадр) могут передаваться на систему DS.
Фиг. 3 является схемой, изображающей еще другую примерную структуру IEEE 802.11 системы, для которой применимо настоящее изобретение. В дополнение к упомянутой структуре Фиг. 2, Фиг. 3 концептуально изображает расширенный служебный набор (ESS) для предоставления широкого покрытия.
Беспроводная сеть, имеющая произвольный размер и сложность, может быть составлена из системы DS и наборов BSS. В IEEE 802.11 системе, такой тип сети называется ESS сетью. Набор ESS может соответствовать набору наборов BSS, подключенных к одной DS. Однако набор ESS не включает систему DS. ESS сеть характеризуется тем, что ESS сеть проявляется как IBSS сеть на уровне управления логическим соединением (LLC). Станции (STA), включаемые в набор ESS, могут связываться друг с другом, и мобильные станции (STA) являются перемещаемыми прозрачно в LLC от одного набора BSS к другому набору BSS (в пределах того же набора ESS).
В стандарте IEEE 802.11, соответственные физические местоположения упомянутых наборов BSS на Фиг. 3 не предполагаются, и следующие формы все являются возможными. Наборы BSS могут частично перекрываться, и эта форма как правило используется, чтобы предоставить непрерывное покрытие. Наборы BSS могут не быть физически соединенными и логические расстояния между наборами BSS не имеют предела. Наборы BSS могут размещаться на той же физической позиции, и эта форма может использоваться, чтобы предоставить избыточность. Один или более наборов IBSS или одна или более ESS сетей могут физически размещаться в том же пространстве, как одна или более ESS сетей. Это может соответствовать форме ESS сети в том случае, в котором самоорганизующаяся сеть работает в местоположении, в котором ESS сеть присутствует, в том случае, в котором IEEE 802.11 сети различных организаций физически перекрываются, или том случае, в котором две или более различных стратегий доступа и стратегий безопасности требуются в том же местоположении.
Фиг. 4 является схемой, изображающей примерную структуру WLAN системы. На Фиг. 4 изображен пример инфраструктуры BSS, включающей в себя систему DS.
В примере Фиг. 4, наборы BSS 1 и BSS2 составляют набор ESS. В WLAN системе, станция (STA) является устройством, работающим в соответствии с MAC/PHY регулированием стандарта IEEE 802.11. Станции (STA) включают в себя AP станции и не-AP станции. Не-AP станции соответствуют таким устройствам, как небольшие портативные компьютеры или мобильные телефоны, управляемые напрямую пользователями. На Фиг. 4 станции STA1, STA3, и STA4 соответствуют не-AP станциям, и станция STA2 и станция STA5 соответствуют AP станциям.
В следующем описании, не-AP станции могут называться как терминал, беспроводной блок приема/передачи (WTRU), пользовательское оборудование (UE), мобильная станция (MS), мобильный терминал или мобильная абонентская станция (MSS). Точка доступа (AP) является понятием, соответствующим базовой станции (BS), Node-B, усовершенствованной базовой станции (e-NB), базовой приемопередающей системе (BTS) или фемто базовой станции в других областях беспроводной связи.
ПРОЦЕСС УСТАНОВЛЕНИЯ ЛИНИИ СВЯЗИ
Фиг. 5 является блок-схемой, поясняющей общий процесс установления линии связи в соответствии с примерным вариантом осуществления настоящего изобретения.
Для того, чтобы позволить станции (STA) устанавливать линию связи по сети, а также передавать/принимать данные по сети, станция (STA) должна выполнять такую установку линии связи в продолжении процессов обнаружения сети, аутентификации и ассоциации, и должна устанавливать ассоциацию и выполнять безопасную аутентификацию. Упомянутый процесс установления линии связи может также называться как процесс инициации сеанса или процесс настройки сеанса. В дополнение, этап ассоциации является характерным определенным периодом для этапов обнаружения, аутентификации, ассоциации, и настройки безопасности упомянутого процесса установления линии связи.
Процесс установления линии связи описывается со ссылкой на Фиг. 5.
На этапе S510, станция (STA) может выполнять действие обнаружения сети. Действие обнаружения сети может включать в себя действие сканирования станции (STA). То есть станция (STA) может осуществлять поиск доступной сети для того, чтобы получить доступ к сети. Станция (STA) должна идентифицировать совместимую сеть перед участием в беспроводной сети. Здесь, упомянутый процесс для идентифицирования сети, содержащейся в конкретном регионе, называется процессом сканирования.
Упомянутая схема сканирования классифицируется на активное сканирование и пассивное сканирование.
Фиг. 5 является блок-схемой, иллюстрирующей действие обнаружения сети, включающее в себя процесс активного сканирования. В случае активного сканирования, станция (STA), конфигурируемая для выполнения сканирования, передает пробный кадр запроса и ожидает ответа на упомянутый пробный кадр запроса, так что станция (STA) может перемещаться между каналами и в то же время может определять, какая точка доступа (AP) присутствует в периферийной области. Передатчик станции-ответчика передает пробный кадр ответа, действуя как ответ на пробный кадр запроса, для станции (STA), которая передала упомянутый пробный кадр запроса. В этом случае, упомянутая станция-ответчик может быть станцией (STA), которая окончательно передала маячковый кадр в наборе BSS сканированного канала. В наборе BSS, поскольку точка доступа (AP) передает упомянутый маячковый кадр, точка доступа (AP) работает как станция-ответчик. В системе IBSS, поскольку станция (STA) системы IBSS последовательно передает упомянутый маячковый кадр, упомянутая станция-ответчик не является постоянной. Например, станция STA, которая передала упомянутый пробный кадр запроса на Канале #1 и приняла упомянутый пробный кадр ответа на Канале #1, сохраняет BSS-ассоциируемую информацию, содержащуюся в упомянутом принимаемом пробном кадре ответа, и перемещается на следующий канал (например, Канал #2), так что станция (STA) может выполнять сканирование с использованием того же способа (то есть пробные запрос/ответ передача/прием на Канале #2).
Хотя не показано на Фиг. 5, упомянутое действие сканирования может также осуществляться с использованием пассивного сканирования. Станция (STA), конфигурируемая для выполнения сканирования в режиме пассивного сканирования, ожидает маячковый кадр, в то время как одновременно перемещается от одного канала на другой канал. Упомянутый маячковый кадр является одним из управляющих кадров в стандарте IEEE 802.11, указывает присутствие беспроводной сети, позволяет станции (STA) осуществлять сканирование для поиска беспроводной сети, и периодически передается таким способом, каким упомянутая станция (STA) может участвовать в беспроводной сети. В наборе BSS, точка доступа (AP) конфигурируется для периодической передачи маячкового кадра. В системе IBSS, станции (STA) системы IBSS конфигурируются для последовательной передачи упомянутого маячкового кадра. Если каждая станция (STA) для сканирования принимает упомянутый маячковый кадр, то станция (STA) сохраняет BSS информацию, содержащуюся в упомянутом маячковом кадре, и перемещается на другой канал и записывает информацию маячкового кадра на каждом канале. Станция (STA), которая приняла упомянутый маячковый кадр, сохраняет BSS-ассоциируемую информацию, содержащуюся в упомянутом принимаемом маячковом кадре, перемещается на следующий канал, и таким образом выполняет сканирование с использованием того же способа.
При сравнении между упомянутым активным сканированием и упомянутым пассивным сканированием, упомянутое активное сканирование является более выгодным, чем упомянутое пассивное сканирование в терминах задержки и энергопотребления.
После того, как станция (STA) обнаружит упомянутую сеть, станция (STA) может выполнять процесс аутентификации на этапе S520. Упомянутый процесс аутентификации может называться как первый процесс аутентификации таким способом, что упомянутый процесс аутентификации может четко отличаться от упомянутого процесса настройки безопасности этапа S540.
Упомянутый процесс аутентификации может включать в себя передачу кадра запроса аутентификации на точку доступа (AP) посредством станции STA, и передачу кадра ответа аутентификации для станции (STA) посредством точки доступа (AP) в ответ на кадр запроса аутентификации. Упомянутый кадр аутентификации, используемый для запроса/ответа аутентификации, может соответствовать кадру управления.
Кадр аутентификации может включать в себя номер алгоритма аутентификации, порядковый номер транзакции аутентификации, код состояния, текст вызова, ошибкоустойчивая сеть безопасности (RSN), конечная циклическая группа (FCG), и т.д. Упомянутая выше информация, содержащаяся в кадре аутентификации, может соответствовать некоторым частям информации, которая способна содержаться в кадре аутентификации запроса/ответа, может замещаться другой информацией, или может включать в себя дополнительную информацию.
Станция (STA) может передавать упомянутый кадр запроса аутентификации к точке доступа (AP). Точка доступа (AP) может принимать решение, осуществлять ли аутентификацию, соответствующую станции (STA) на основе информации, содержащейся в упомянутом принимаемом кадре запроса аутентификации. Точка доступа (AP) может предоставлять результат аутентификации для станции (STA) через кадр ответа аутентификации.
После того, как станция (STA) успешно прошла аутентификацию, упомянутый процесс ассоциации может осуществляться на этапе S530. Упомянутый процесс ассоциации может предполагать передачу кадра запроса ассоциации к точке доступа (AP) посредством станции STA, и передачу кадра ответа ассоциации к станции (STA) посредством точки доступа (AP) в ответ на кадр запроса ассоциации.
Например, упомянутый кадр запроса ассоциации может включать в себя информацию, связанную с различными возможностями, интервал прослушивания маяка, идентификатор служебного набора (SSID), поддерживаемые скорости передачи данных, поддерживаемые каналы, RSN, домен мобильности, поддерживаемые классы работы, запрос широковещательной передачи TIM (Карта индикации трафика), способность служебного межсетевого взаимодействия и т.д.
Например, упомянутый кадр ответа ассоциации может включать в себя информацию, связанную с различными возможностями, код состояния, идентификатор ассоциации (AID), поддерживаемые скорости передачи, набор параметров расширенного распределенного доступа к каналу (EDCA), индикатор мощности принимаемого канала (RCPI), индикатор принимаемого отношения сигнал-шум (RSNI), домен мобильности, интервал лимита времени (время возвращения ассоциации), параметр перекрывания BSS сканирования, ответ широковещательной передачи TIM, карта QoS и т.д.
Упомянутая выше информация может соответствовать некоторым частям информации, способным содержаться в упомянутом кадре запроса/ответа ассоциации, может быть замещена другой информацией, или может включать в себя дополнительную информацию.
После того, как станция (STA) успешно связалась с сетью, процесс настройки безопасности может осуществляться на этапе S540. Упомянутый процесс настройки безопасности этапа S540 может называться как процесс аутентификации на основе запроса/ответа ассоциации ошибкоустойчивой сети безопасности (RSNA). Упомянутый процесс аутентификации этапа S520 может называться как первый процесс аутентификации, и упомянутый процесс настройки безопасности этапа S540 может также просто называться как процесс аутентификации.
Например, упомянутый процесс настройки безопасности этапа S540 может включать в себя процесс настройки индивидуального ключа через подтверждение установления связи 4-путей (4-way) на основе кадра расширяемого протокола аутентификации через сеть LAN (EAPOL). В дополнение, упомянутый процесс настройки безопасности может также осуществляться в соответствии с другими схемами безопасности, не определенными в стандартах IEEE 802.11.
Усовершенствование сети WLAN
Для того чтобы устранить ограничения в скорости передачи системы WLAN, стандарт IEEE 802.11n был недавно установлен как стандарт систем связи. Стандарт IEEE 802.11n нацелен на увеличение скорости сети и надежности, а также на расширение области покрытия беспроводной сети. Более подробно, стандарт IEEE 802.11n поддерживает высокую пропускную способность (HT) максимально 540 Мбит/с, и основывается на технологии MIMO, в которой несколько антенн монтируются на каждой из передающая сторона и приемная сторона.
С широким распространением использования WLAN технологии и многообразием WLAN приложений, имеется необходимость разработать новую WLAN систему, способную поддерживать пропускную способность (HT) выше, чем скорость обработки данных, поддерживаемая стандартом IEEE 802.11n. WLAN система следующего поколения для поддержки очень высокой пропускной способности (Very High Throughput, VHT) является следующей версией (например, IEEE 802.11 ac) упомянутой IEEE 802.11n WLAN системы, и является одной из IEEE 802.11 WLAN систем, недавно предложенной для поддержки скорости обработки данных 1 Гбит/с или больше на MAC SAP (Точки доступа службы управления доступом к среде).
Для того чтобы эффективно использовать радиочастотный канал (RF) канал, WLAN система следующего поколения поддерживает MU-MIMO (многопользовательский множественный вход - множественный выход) передачу, в которой множество станций (STA) могут одновременно получать доступ к каналу. В соответствии со схемой MU-MIMO передачи, точка доступа (AP) может одновременно передавать пакеты к по меньшей мере одной MIMO-сдвоенной станции STA.
В дополнение, технология для поддержки работы WLAN системы в свободной части полосы была недавно рассмотрена. Например, технология для представления упомянутой WLAN системы в свободной части полосы (TV WS) такой как незанятая полоса частот (например, полоса 54~698 МГц), которая была оставлена из-за перехода на цифровое телевидение (TV), была рассмотрена на основании стандарта IEEE 802.11af. Однако упомянутая выше информация раскрывается только для целей иллюстрации, и упомянутая свободная часть полосы может быть лицензированной полосой, способной быть первоначально используемой только лицензированным пользователем. Упомянутый лицензированный пользователь может быть пользователем, который имеет полномочие использовать упомянутую лицензированную полосу, и может также называться как лицензированное устройство, первичный пользователь, действующий пользователь или т.п.
Например, точка доступа (AP) и/или станция (STA), работающие в свободной части полосы (WS) должны предоставлять функцию для защиты упомянутого лицензированного пользователя. Например, предполагая, что упомянутый лицензированный пользователь, такой как микрофон, уже использовал конкретный WS канал, действующий как разделенная полоса частот, по регулированию в способе, что конкретная ширина полосы является занятой от упомянутой WS полосы, точка доступа (AP) и/или станции (STA) не может использовать упомянутую полосу частот, соответствующую соответствующему WS каналу для того, чтобы защитить упомянутого лицензированного пользователя. В дополнение, точка доступа (AP) и/или станция (STA) должна остановить использование соответствующей полосы частот при условии, что упомянутый лицензированный пользователь использует полосу частот, используемую для передачи и/или приема текущего кадра.
По этой причине, точка доступа (AP) и/или станция (STA) должна определить, используется ли конкретная полоса частот полосы WS. Другими словами, точка доступа (AP) и/или станция (STA) должна определить присутствие или отсутствие действующего пользователя или лицензированного пользователя в упомянутой полосе частот. Упомянутая схема для определения присутствия или отсутствия действующего пользователя в конкретной полосе частот называется как схема зондирования спектра. Схема детектирования энергии, схема детектирования сигнатуры и т.п. может использоваться как механизм зондирования спектра. Точка доступа (AP) и/или станция (STA) может определять, что упомянутая полоса частот является используемой действующим пользователем, если мощность принимаемого сигнала превышает предварительно определенное значение, или когда DTV преамбула детектируется.
Технология межмашинной связи (M2M) рассматривается как технология связи следующего поколения. Технический стандарт для поддержки M2M связи был разработан как стандарт IEEE 802.11ah в IEEE 802.11 WLAN системе. M2M связь относится к схеме связи, включающей в себя одну или более машин, или может также называться как связь машинного типа (MTC) или межмашинная связь (M2M). В этом случае, упомянутая машина может быть объектом, который не требует прямого управления и вмешательства пользователя. Например, не только измерительная или торговая машина включают в себя радиочастотный (RF) модуль, но также пользовательское оборудование (UE) (такое как смартфон), способное осуществлять связь посредством автоматического доступа к сети без пользовательского вмешательства/управления может быть примером таких машин. M2M связь может включать в себя связь устройства с устройством (D2D) и связь между устройством и сервером приложений, и т.д. Как примерная связь между упомянутым устройством и сервером приложений, связь между торговой машиной и сервером приложений, связь между устройством точки продажи (POS) и сервером приложений, и связь между электрическим измерителем, газовым измерителем или измерителем воды и сервером приложений. Основанная на M2M связь приложений может включать в себя безопасность, транспортировку, здравоохранение, и т.д. В случае рассмотрения упомянутых выше примеров приложений, M2M связь имеет для своей поддержки способ передачи/приема время от времени небольшого количества данных на низкой скорости в условиях окружающей среды, включающей в себя большое число устройств.
Более подробно, M2M связь должна поддерживать большое число станций (STA). Хотя текущая WLAN система предполагает, что одна точка доступа (AP) ассоциируется с максимально 2007 станциями (STA), различные способы для поддержки других случаев, в которых намного больше станций (STA) (например, около 6000 станций (STA)) ассоциируются с одной точкой доступа (AP), недавно рассматривались в M2M связи. В дополнение, ожидается, что много приложений для поддержки/запрашивания низкой скорости передачи данных присутствуют в M2M связи. Для того, чтобы ровно поддерживать много станций (STA), WLAN система может распознавать присутствие или отсутствие данных предназначенных для передачи к станции (STA) на основе TIM (карты индикации трафика), и различные способы для уменьшения размера битовой карты упомянутой карты TIM недавно рассматривались. В дополнение, ожидается, что много данных трафика, имеющих очень длительный интервал передачи/приема присутствует в M2M связи. Например, в M2M связи, очень небольшое количество данных (например, измерения электричества/газа/воды) требуют передачи на длинных интервалах (например, каждый месяц). По этой причине, хотя число станций (STA), ассоциируемых с одной точкой доступа (AP), увеличивается в WLAN системе, многие разработчики и компании проводят интенсивные исследования в WLAN системе, которая может эффективно поддерживать случай, в котором имеется очень небольшое число станций (STA), каждая из которых имеет кадр данных, предназначенный для приема от точки доступа (AP) в течение одного маячкового периода.
Как описано выше, WLAN технология быстро развивается, и не только упомянутые выше примерные технологии, но также другие технологии, такие как установление прямой линии связи, улучшение потоковой пропускной способности медиаданных, высокоскоростное и/или поддержка глобального первоначального установления сеанса и поддержка расширенной ширины полосы и рабочей частоты, интенсивно разрабатываются.
МЕХАНИЗМ ДОСТУПА К СРЕДЕ
В WLAN системе на основе стандарта IEEE 802.11, базовый механизм доступа управления доступа к среде (MAC) является механизмом множественного доступа с контролем несущей с предотвращением коллизий (CSMA/CA). Механизм CSMA/CA называется как функция распределенного координирования (DCF) MAC стандарта IEEE 802.11, и в своей основе включает в себя механизм доступа "слушать перед тем, как говорить (Listen Before Talk)". В соответствии с упомянутым выше механизмом доступа, точка доступа (AP) и/или станция (STA) могут выполнять оценивание свободного канала (CCA) для зондирования RF канала или среды в течение предварительно определенного временного интервала [например, межкадровое пространство DCF (DIFS)], перед передачей данных. Если определяется, что упомянутая среда находится в свободном состоянии, начинается передача кадра через соответствующую среду. С другой стороны, если определяется, что упомянутая среда находится в занятом состоянии, соответствующая точка доступа (AP) и/или станция (STA) не начинает свою собственную передачу, устанавливает a время задержки (например, случайный период отсрочки передачи) для доступа к среде, и пытается запустить передачу кадра после ожидания в течение определенного времени. Через применение случайного периода отсрочки передачи, ожидается, что несколько станций (STA) будут пытаться начать передачу кадра после ожидания в течение разных интервалов времени, что приводит к минимальным колизиям.
В дополнение, протокол IEEE 802.11 MAC, предоставляет гибридную функцию координирования (HCF). FICF является функцией координирования на основе функции координирования DCF и точечной функции координирования (PCF). Функция PCF относится к схеме синхронного доступа на основе опроса, в которой периодический опрос выполняется подобным образом, что все принимающие (Rx) точки доступа (AP) и/или станции (STA) могут принимать кадр данных. В дополнение, функция HCF включает в себя расширенный распределенный доступ к каналу (EDCA) и управляемый HCF доступ к каналу (FICCA). Доступ EDCA достигается, когда упомянутая схем доступа, предоставляемая от поставщика к множеству пользователей, является основанной на состязательном доступе. Доступ FICCA достигается посредством схемы доступа к каналу на бессостязательной основе на основе механизма опроса. В дополнение, функция HCF включает в себя механизм доступа к среде для улучшения качества обслуживания (QoS) сети WLAN и может передавать данные как в состязательном периоде (CP), так и в бессостязательном периоде (CFP).
[100] Фиг. 6 является концептуальной графической схемой, иллюстрирующей процесс отсрочки.
Операции на основе случайного периода отсрочки передачи будут здесь после того, как будут описаны со ссылкой на Фиг. 6. Если состояние среды занято (состояние занято (occupy-state) или состояние занято (busy-state)) изменяется на свободное состояние, то несколько станций (STA) могут пытаться передавать данные (или кадр). Как способ осуществления минимального числа коллизий, каждая станция (STA) выбирает случайный счетчик отсрочки, ожидает время слота соответствующее выбранному счетчику отсрочки, и затем пытается запустить передачу данных. Случайный счетчик отсрочки имеет значение номера пакета (PN), и может устанавливаться на одно из значений от 0 до CW. В этом случае, CW относится к значению параметра окна состязания. Хотя первоначальное значение параметра CW обозначается посредством параметр CWmin, упомянутое первоначальное значение может быть удвоено в случае неисправности передачи (например, в том случае, в котором ACK кадра передачи не принят). Если значение параметра CW обозначается посредством CWmax, параметр CWmax поддерживается до тех пор, пока передача данных является успешной, и в то же время является возможным пытаться начать передачу данных. Если передача данных была успешной, упомянутое значение параметра CW возвращается на значение CWmin. Предпочтительно, CW, CWmin, и CWmax устанавливаются на 2n-1 (где n=0,1,2,…).
Если случайный процесс отсрочки начинает работу, станция (STA) непрерывно наблюдает упомянутую среду, пока осуществляется обратный отсчет слота отсрочки в ответ на определенное значение отсрочки счетчика. Если среда наблюдается как занятое состояние, упомянутый обратный отсчет останавливается и ожидает предварительно определенное время. Если среда находится в свободном состоянии, то оставшийся обратный отсчет возобновляется.
Как показано в примере Фиг. 6, если пакет, предназначенный для передачи на MAC станции STA3, прибывает на станцию STA3, то станция STA3 определяет, находится ли упомянутая среда в свободном состоянии в течение DIFS, и может прямо начать передачу кадра. Тем временем, оставшиеся станции (STA) наблюдают, находится ли упомянутая среда в занятом состоянии, и ожидают в течение определенного времени. В течение предварительно определенного времени, данные, предназначенные для передачи, могут происходить в каждой из станций STA1, STA2, и STA5. Если среда находится в свободном состоянии, то каждая станция (STA) ожидает в течение времени DIFS и затем выполняет обратный отсчет слота отсрочки в ответ на значение случайного счетчика отсрочки, выбираемого посредством каждой станции (STA). Пример Фиг. 6 изображает, что станция STA2 выбирает наименьшее значение счетчика отсрочки, и станция STA1 выбирает наивысшее значение счетчика отсрочки. То есть после того, как станция STA2 завершает счетчик отсрочки, отставшее время отсрочки станции станция STA5 при времени начала передачи кадра меньше, чем оставшееся время отсрочки станции STA1. Каждая из станций STA1 и станция STA5 временно останавливает обратный отсчет, пока STA2 занимает упомянутую среду, и ожидает предварительно определенное время. Если занятость станцией STA2 завершается и упомянутая среда повторно переходит в свободное состояние, то каждая из станций STA1 и станция STA5 ожидает предварительно определенное время DIFS, и возобновляет счетчик отсрочки. То есть после того, как оставшийся слот отсрочки с тех пор, как оставшееся время отсрочки подвергается обратному отсчету, передача кадра может запустить работу. Поскольку оставшееся время отсрочки станция STA5 меньше, чем оставшееся время отсрочки станции STA1, станция STA5 начинает передачу кадра. Тем временем, данные, предназначенные для передачи, могут происходить в станции STA4, пока станция STA2 занимает упомянутую среду. В этом случае, если среда находится в свободном состоянии, то станция STA4 ожидает в течение DIFS времени, выполняет обратный отсчет в ответ на значение случайного счетчика отсрочки, выбираемое станцией STA4, и затем начинает передачу кадра. Фиг. 6 примерно изображает тот случай, в котором оставшееся время отсрочки станции STA5 является идентичным значению случайного счетчика отсрочки станции STA4 случайно. В этом случае, неожиданная коллизия может произойти между станциями STA4 и STA5. Если коллизия происходит между станциями STA4 и STA5, то каждая из станций STA4 и STA5 не принимает ACK, что приводит к возникновению неисправности при передаче данных. В этом случае, каждая из станций STA4 и STA5 увеличивают CW значение в два раза, и станция STA4 или станция STA5 могут выбирать значение случайного счетчика отсрочки и затем выполнять обратный отсчет. Тем временем, станция STA1 ожидает предварительно определенное время, пока упомянутая среда находится в занятом состоянии из-за передачи станций STA4 и STA5. В этом случае, если среда находится в свободном состоянии, то станция STA1 ожидает в течение DIFS времени, и затем запускает передачу кадра после того, как прекращения действия оставшегося времени отсрочки.
ОПЕРАЦИЯ ЗОНДИРОВАНИЯ СТАНЦИИ (STA)
Как описано выше, упомянутый CSMA/CA механизм включает в себя не только механизм физического зондирования, в котором точка доступа (AP) и/или станция (STA) могут напрямую зондировать упомянутую среду, но также виртуальный механизм зондирования несущей. Упомянутый виртуальный механизм зондирования несущей может решить некоторые проблемы (такие как проблема скрытого узла), которые встречаются в доступе к среде. Для виртуального зондирования несущей, MAC системы WLAN может использовать вектор распределения сети (NAV). Более подробно, посредством упомянутого значения NAV, точка доступа (AP) и/или станция (STA), каждая из которых в настоящее время использует упомянутую среду или имеет полномочие использовать упомянутую среда, может информировать другую точку доступа (AP) и/или другую станцию (STA) для оставшегося времени, в которое упомянутая среда является доступной. Соответственно, значение NAV может соответствовать зарезервированному времени, в которое упомянутая среда будет использоваться посредством точки доступа (AP) и/или станции (STA), конфигурируемой, чтобы передавать соответствующий кадр. Станции (STA), которая приняла упомянутое значение NAV, может быть запрещен доступ к среде (или доступ к каналу) в течение соответствующего зарезервированного времени. Например, NAV может устанавливаться в соответствии со значением поля 'длительность' заголовка MAC упомянутого кадра. В дополнение, значение NAV вычисляется/определяется как единица микросекунды.
Ошибкоустойчивый механизм детектирования коллизий был предложен для уменьшения вероятности такой коллизии, и как таковое подробное описание этого механизма будет здесь после того, как будет описано со ссылкой на фигуры Фиг. 7 и Фиг. 8. Хотя действительный диапазон зондирования несущей отличается от диапазона передачи, предполагается, что действительный диапазон зондирования несущей является идентичным диапазону передачи для удобства описания и лучшего понимания настоящего изобретения.
Фиг. 7 является концептуальной графической схемой, иллюстрирующей скрытый узел и открытый узел.
Фиг. 7(a) примерно изображает упомянутый скрытый узел. На Фиг. 7(a), станция (STA) A обменивается информацией с станцией (STA) B, и станция (STA) C имеет информацию, предназначенную для передачи. На Фиг. 7(a), станция (STA) C может определять, что упомянутая среда находится в свободном состоянии, когда осуществляет сканирование зондирования несущей перед передачей данных к станции (STA) B, при условии, что станция (STA) A передает информацию к станции (STA) B. Поскольку передача станции (STA) A (то есть занятая среда) может не детектироваться на местоположении станции (STA) C, определяется, что упомянутая среда находится в свободном состоянии. В этом случае, станция (STA) B одновременно принимает информацию станции (STA) A и информацию станции (STA) C, что приводит к возникновению коллизии. Здесь, станция (STA) A может рассматриваться как скрытый узел станции (STA) C.
Фиг. 7(b) примерно изображает открытый узел. На Фиг. 7(b), при условии, что станция (STA) B передает данные к станции (STA) A, станция (STA) C имеет информацию, предназначенную для передачи на станцию (STA) D. Если станция (STA) C выполняет зондирование несущей, то определяется, что упомянутая среда является занятой из-за передачи станции (STA) B. По этой причине, хотя станция (STA) C имеет информацию, предназначенную для передачи к станции (STA) D, зондируется состояние занятой среды, так что станция (STA) C должна ожидать в течение определенного времени (то есть режим ожидания) пока упомянутая среда находится в свободном состоянии. Однако, поскольку станция (STA) A действительно размещается вне диапазона передачи станции (STA) C, передача от станции (STA) C может не подвергаться коллизии с передачей от станции (STA) B с точки зрения станции (STA) A, так что станция (STA) C излишне переходит в режим ожидания, пока станция (STA) B не остановит передачу. Здесь, станция (STA) C называется как открытый узел станции (STA) B.
Фиг. 8 является концептуальной графической схемой, иллюстрирующей RTS (Запрос на передачу) и CTS (Готовность к передаче).
Для того чтобы эффективно использовать механизм предотвращения коллизий при упомянутой выше ситуации Фиг. 7, является возможным использовать короткий сигнальный пакет, такой как RTS (Запрос на передачу) и CTS (Готовность к передаче). Обмен RTS/CTS между двумя станциями (STA) может подвергаться накладным расходам посредствам периферийной станции STA (станций), так что периферийная станция STA (станции) могут рассматривать, передается ли информация между упомянутыми двумя станциями STA. Например, если станция (STA), предназначенная для использования для передачи данных, передает упомянутый RTS кадр к станции (STA), имеющей принятые данные, то станция (STA), имеющая принятые данные, передает упомянутый CTS кадр к периферийным станциям STA, и может информировать упомянутые периферийные станции (STA) о том, что станция (STA) собирается принимать данные.
Фиг. 8(a) примерно изображает способ решения проблем скрытого узла. На Фиг. 8(a), предполагается, что каждая из станция (STA) A и станция (STA) C готова передавать данные станции (STA) B. Если станция (STA) A передает RTS станции (STA) B, то станция (STA) B передает CTS каждой из станция (STA) A и станция (STA) C, размещаемой по соседству от станции (STA) B. В результате, станция (STA) C должна ожидать в течение определенного времени до тех пор, пока станция (STA) A и станция (STA) B не остановят передачу данных, так что предотвращается возникновение коллизии.
Фиг. 8(b) примерно изображает способ решения проблем видимого узла. Станция (STA) C выполняет прослушивание RTS/CTS передачи между станцией (STA) A и станцией (STA) B, так что станции (STA) C может определить отсутствие коллизии, хотя она передает данные на другую станцию (STA) (например, станцию (STA) D). То есть станция (STA) B передает RTS на все периферийные станции STA, и только станция (STA) A, имеющая данные, предназначенные для действительной передачи, может передавать CTS. Станция (STA) C принимает только RTS и не принимает CTS станции (STA) A, так что может распознаваться, что станция (STA) A размещается вне диапазона зондирования несущей станции (STA) C.
УПРАВЛЕНИЕ ЭНЕРГОПОТРЕБЛЕНИЕМ
Как описано выше, упомянутая WLAN система должна выполнять зондирование канала перед тем, как станция (STA) выполняет передачу/прием данных. Упомянутая операция постоянного зондирования канала вызывает постоянное энергопотребление станции STA. Имеется не слишком много различия в энергопотреблении между состоянием приема (Rx) и состоянием передачи (Tx). Непрерывное сохранение состояния Rx может вызывать большую нагрузку для станции (STA) с ограниченной мощностью (то есть станции (STA), работающей посредством батареи). По этой причине, если станция (STA) сохраняет режим ожидания приема (Rx) для того, чтобы постоянно зондировать канал, энергия неэффективно потребляется без конкретных преимуществ в терминах WLAN пропускной способности. Для того чтобы решить упомянутую выше проблему, WLAN система поддерживает режим управления энергопотреблением (PM) станции (STA).
Режим PM станции (STA) классифицируется на активный режим и энергосберегающий режим (PS). Станция (STA) в своей основе работает в активном режиме. Станция (STA), работающая в активном режиме, поддерживает состояние пробуждения. Если станция (STA) находится в состоянии пробуждения, то станция (STA) может нормально работать, так что она может выполнять передачу/прием кадра, сканирование канала или т.п. С другой стороны, станция (STA), работающая в PS режиме конфигурируется для переключения от состояния дремания в состояние пробуждения или наоборот. Станция (STA), работающая в состоянии сна, работает с минимальным энергопотреблением, и станция (STA) не выполняет передачу/прием кадра и сканирование канала.
Количество энергопотребления уменьшается пропорционально конкретному времени, в котором станция (STA) остается в спящем состоянии, так что время работы станции (STA) увеличивается в ответ на уменьшенное энергопотребление. Однако, невозможно передавать или принимать кадр в спящем состоянии, так что станция (STA) не может постоянно работать в течение длительного периода времени. Если имеется кадр, предназначенный для передачи к точке доступа (AP), то станция (STA), работающая в спящем состоянии, переключается в состояние пробуждения, так что она может передавать/принимать упомянутый кадр в состоянии пробуждения. С другой стороны, если точка доступа (AP) имеет кадр, предназначенный для передачи к станции STA, находящаяся в спящем состоянии станция (STA) не может принимать упомянутый кадр и не может распознавать присутствие кадра, предназначенного для приема. Соответственно, станции (STA) может потребоваться переключиться в состояние пробуждения в соответствии с конкретным периодом для того, чтобы распознать присутствие или отсутствие кадра, предназначенного для передачи к станции (STA) (или для того, чтобы принимать сигнал, указывающий присутствие кадра в предположении, что присутствие упомянутого кадра, предназначенного для передачи к станции (STA), определено).
Фиг. 9 является концептуальной графической схемой, иллюстрирующей операцию управления энергопотреблением (PM).
Ссылаясь на Фиг. 9, точка доступа (AP) 210 передает маячковый кадр к станции (STA), присутствующий в наборе BSS на интервалах предварительно определенных периодов время на этапах (S211, S212, S213, S214, S215, S216). Упомянутый маячковый кадр включает в себя TIM информационный элемент. Упомянутый TIM информационный элемент включает в себя буферизованный трафик относительно станции (STA), связанной с точкой доступа (AP) 210, и включает в себя конкретную информацию, указывающую, что кадр является предназначенным для передачи. Упомянутый TIM информационный элемент включает в себя карту TIM для указывания одноадресного кадра и карты индикации доставки трафика (DTIM) для указывания многоадресного или широковещательного кадра.
Точка доступа (AP) 210 может передавать карту DTIM один раз всякий раз, когда маячковый кадр передается три раза. Каждая из станций STA1 220 и STA2 222 работает в PS режиме. Каждая из станций STA1 220 и STA2 222 переключается от спящего состояния в состояния пробуждения каждый интервал пробуждения, так что станция STA1 220 и станция STA2 222 могут конфигурироваться, чтобы принимать TIM информационный элемент, передаваемый посредством точки доступа (AP) 210. Каждая станция (STA) может вычислять время начала переключения, при котором каждая станция (STA) может начать переключение в состояние пробуждения на основе своих собственных локальных часов. На Фиг. 9, предполагается, что часы станции (STA) являются идентичным часам точки доступа (AP).
Например, предварительно определенный интервал пробуждения может конфигурироваться таким способом, что станция STA1 220 может переключаться в состояние пробуждения, чтобы принимать TIM элемент каждый маячковый интервал. Соответственно, станция STA1 220 может переключаться в состояние пробуждения на этапе S221, когда точка доступа (AP) 210 первая передает упомянутый маячковый кадр на этапе S211. Станция STA1 220 принимает упомянутый маячковый кадр, и получает TIM информационный элемент. Если полученный TIM элемент указывает присутствие кадра, предназначенного для передачи к станции STA1 220, то станция STA1 220 может передавать кадр опроса энергосбережения (PS-Poll), который запрашивает точку доступа (AP) 210 передавать упомянутый кадр, для точки доступа (AP) 210 на этапе S221a. Точка доступа (AP) 210 может передавать упомянутый кадр к станции STA1 220 в ответ на PS-Poll кадр на этапе S231. Станция STA1 220, которая приняла упомянутый кадр, повторно переключается в упомянутое спящее состояние, и работает в спящем состоянии.
Когда точка доступа (AP) 210 во-вторых передает упомянутый маячковый кадр, состояние занятой среды, в котором упомянутая среда является доступной посредством другого устройства, получается, точка доступа (AP) 210 не может передавать маячковый кадр на точном маячковом интервале и может передавать упомянутый маячковый кадр в отсроченное время на этапе S212. В этом случае, хотя станция STA1 220 переключается в состояние пробуждения в ответ на маячковый интервал, она не принимает задержанный передаваемый маячковый кадр, так что она повторно переходит в спящее состояние на этапе S222.
Когда точка доступа (AP) 210 в-третьих передает упомянутый маячковый кадр, соответствующий маячковый кадр может включать в себя TIM элемент, обозначаемый DTIM. Однако, поскольку передается состояние занятой среды, точка доступа (AP) 210 передает упомянутый маячковый кадр в отсроченное время на этапе S213. Станция STA1 220 переключается в состояние пробуждения в ответ на маячковый интервал, и может получить карту DTIM через маячковый кадр, передаваемый посредством точки доступа (AP) 210. Предполагается, что карта DTIM, полученная посредством станции STA1 220 не имеет кадр, предназначенный для передачи к станции STA1 220, и имеется кадр для другой станции STA. В этом случае, станция STA1 220 подтверждает отсутствие кадра, предназначенного для приема в станции STA1 220, и повторно переходит в спящее состояние, так что станция STA1 220 может работать в спящем состоянии. После того, как точка доступа (AP) 210 передает упомянутый маячковый кадр, точка доступа (AP) 210 передает упомянутый кадр к соответствующей станции (STA) на этапе S232.
Точка доступа (AP) 210 в-четвертых передает упомянутый маячковый кадр на этапе S214. Однако, невозможно для станции STA1 220 получить информацию относительно присутствия буферизованного трафика, ассоциированного с станцией STA1 220 через двойной прием TIM элемента, так что станция STA1 220 может регулировать упомянутый интервал пробуждения для приема упомянутого TIM элемента. Альтернативно, при условии если информация сигнализации для координирования значения упомянутого интервала пробуждения станции STA1 220 содержится в маячковом кадре, передаваемом посредством точки доступа (AP) 210, то значение упомянутого интервала пробуждения станции STA1 220 может регулироваться. В этом примере, станция STA1 220, которая переключилась, чтобы принимать TIM элемент каждый маячковый интервал, может переключиться на другое состояние работы, в котором станция STA1 220 может пробуждаться от упомянутого спящего состояния один раз каждые три маячковых интервала. По этой причине, когда точка доступа (AP) 210 передает четвертый маячковый кадр на этапе S214 и передает пятый маячковый кадр на этапе S215, станция STA1 220 сохраняет спящее состояние, так что она не может получить соответствующий TIM элемент.
Когда точка доступа (AP) 210 в-шестых передает упомянутый маячковый кадр на этапе S216, станция STA1 220 переключается в состоянии пробуждения и работает в состоянии пробуждения, так что станция STA1 220 не может получить TIM элемент, содержащийся в маячковом кадре на этапе S224. Упомянутый TIM элемент является картой DTIM, указывающей присутствие широковещательного кадра, так что станция STA1 220 не передает PS-Poll кадр к точке доступа (AP) 210 и может принимать широковещательный кадр, передаваемый посредством точки доступа (AP) 210 на этапе S234. Тем временем, интервал пробуждения станции STA2 230 может быть длиннее, чем интервал пробуждения станции STA1 220. Соответственно, станция STA2 230 переходит в состояние пробуждения в конкретное время S215, где точка доступа (AP) 210 в-пятых передает упомянутый маячковый кадр, так что станция STA2 230 может принимать упомянутый TIM элемент на этапе S241. Станция STA2 230 распознает присутствие кадра, предназначенного для передачи к станциии STA2 230 через TIM элемент, и передает упомянутый PS-Poll кадр к точке доступа (AP) 210 для того чтобы запросить передачу кадра на этапе S241a. Точка доступа (AP) 210 может передавать упомянутый кадр на станцию STA2 230 в ответ на PS-Poll кадр на этапе S233.
Для того чтобы работать/управлять режимом энергосбережения (PS), изображенном на Фиг. 9, упомянутый TIM элемент может включать в себя либо TIM, указывающий присутствие или отсутствие кадра, предназначенного для передачи к станции STA, или карту DTIM, указывающую присутствие или отсутствие широковещательного/многоадресного кадра. Карта DTIM может осуществляться через установку поля TIM элемента.
Фигуры с Фиг. 10 по Фиг. 12 являются концептуальными схемами, иллюстрирующими подробные операции станции (STA), принимающей карту индикации трафика (TIM).
Ссылаясь на Фиг. 10, станция (STA) переключается от упомянутого спящего состояния на состояние пробуждения для того чтобы, принимать упомянутый маячковый кадр, включающий в себя TIM от точки доступа (AP). Станция (STA) интерпретирует упомянутый принимаемый TIM элемент так, что она может распознавать присутствие или отсутствие буферизованного трафика, предназначенного для передачи к станции STA. После того, как станция (STA) состязается с другими станциями (STA) за доступ к упомянутой среде для PS-Poll передачи кадра, станция (STA) может передавать PS-Poll кадр для запрашивания кадра передачи данных к точки доступа (AP). Точка доступа (AP), которая приняла упомянутый PS-Poll кадр, передаваемый посредством станции (STA), может передавать упомянутый кадр к станции STA. Станция (STA) может принимать кадр данных и затем передавать ACK кадр к точке доступа (AP) в ответ на принимаемый кадр данных. Впоследствии после того, станция (STA) может повторно перейти в спящее состояние.
Как может быть видно из Фиг. 10, точка доступа (AP) может работать в соответствии со схемой незамедлительного ответа, так что точка доступа (AP) принимает PS-Poll кадр от станции (STA) и передает упомянутый кадр данных после того, как прекращается предварительно определенное время [например, короткое межкадровое пространство (SIFS)]. В противоположность этому, точка доступа (AP), которая приняла упомянутый PS-Poll кадр, не готовит кадр данных, предназначенный для передачи к станциии (STA) в течение SIFS времени, так что точка доступа (AP) может работать в соответствии со схемой замедленного ответа, и как таковое подробное описание этого механизма будет здесь далее описано со ссылкой на Фиг. 11.
Операции станции (STA) Фиг. 11, на котором станция (STA) переключается от упомянутого спящего состояния на состояние пробуждения, принимает TIM от точки доступа (AP) и передает упомянутый PS-Poll кадр к точке доступа (AP) через состязание, являются идентичными тем операциям, изображенным на Фиг. 10. Если точка доступа (AP), которая приняла упомянутый PS-Poll кадр, не готовит кадр данных в течение SIFS времени, точка доступа (AP) может передавать ACK кадр к станции (STA) вместо передачи кадра данных. Если кадр данных готовится после того, как передача ACK кадра, точка доступа (AP) может передавать кадр данных к станции (STA) после того, как произойдет завершение такого состязания. Станция (STA) может передавать ACK кадр, указывающий успешный прием кадра данных к точке доступа (AP), и может перемещаться в спящее состояние.
Фиг. 12 изображает примерный случай, в котором точка доступа (AP) передает карту DTIM. Станция (STA) может переключиться от упомянутого спящего состояния в состояние пробуждения для того, чтобы принимать маячковый кадр, включающий в себя DTIM элемент от точки доступа (AP). Станция (STA) может распознавать, что многоадресный/широковещательный кадр (кадры) будут передаваться через принимаемую карту DTIM. После того, как передача маячкового кадра, включающего в себя упомянутую карту DTIM, точка доступа (AP) может прямо передавать данные (то есть многоадресный/широковещательный кадр) без передачи/приема PS-Poll кадра. Пока станция (STA) непрерывно сохраняет упомянутое состояние пробуждения после того, как произошел прием маячкового кадра, включающего в себя упомянутую карту DTIM, станция (STA) может принимать данные, и затем переключать в спящее состояние после того, как завершился прием данных.
СТРУКТУРА КАДРА
Фиг. 13 является схемой для пояснения примерного формата кадра, используемого в 802.11 системе.
Формат кадра единицы пакетных данных протокола сходимости физического уровня (PLCP) (PPDU) может включать в себя короткое обучающее поле (STF), длинное обучающее поле (LTF), сигнальное поле (SIG) и поле данных. Наиболее базисный (например, non-FIT) формат кадра PPDU может быть составлен из унаследованного поля STF (L-STF), унаследованного поля LTF (L-LTF), поля SIG и поля данных. В дополнение, наиболее базовый формат кадра PPDU может далее включать в себя дополнительные поля (то есть поля STF, LTF и SIG) между полем SIG и полем данных в соответствии с типами формата кадра PPDU (например, HT-смешанный формат PPDU, HT-формат «зеленого кадра» PPDU (HT-greenfield format PPDU, формат без поддержки унаследованного режима), VHT PPDU и т.п).
Поле STF является сигналом для детектирования сигнала, автоматической регулировки усиления (AGC), выбора разнесения, точной временной синхронизации и т.д. Поле LTF является сигналом для оценивания параметров канала, оценивания ошибки по частоте и т.д. Сумма поля STF и поля LTF может называться как PCLP преамбулой. Упомянутая PLCP преамбула может называться как сигнал для синхронизации и оценивания параметров канала OFDM физического уровня.
Поле SIG может включать в себя поле RATE (скорость), поле LENGTH (длина) и т.д. Поле RATE может включать в себя информацию относительно модуляции данных и скорости кодирования. Поле LENGTH может включать в себя информация относительно длины данных. Более того, поле SIG может включать в себя поле контроля четности, хвостовой бит SIG TAIL и т.д.
Поле данных может включать в себя служебное поле, служебную единицу данных PLCP (PSDU), и хвостовой бит PPDU TAIL. Если необходимо, то поле данных может далее включать в себя бит заполнения. Некоторые биты служебного поля могут использоваться для синхронизации дескремблера приемника. Единица PSDU может соответствовать единице MAC PDU, определяемой на уровне MAC, и может включать в себя данные, генерируемые/используемые на более высоком уровне. Хвостовой бит PPDU TAIL может позволять кодеру возвращаться в состояние нуля (0). Бит заполнения может использоваться для регулирования длины поля данных в соответствии с предварительно определенной единицей.
Единица MAC PDU может определяться в соответствии с различными форматами кадра MAC, и основной MAC кадр состоит из заголовка MAC, тела кадра и проверочной последовательности кадра. MAC кадр состоит из MAC единиц PDU, так что он может передаваться/приниматься через единицу PSDU части данных формата кадра PPDU.
Заголовок MAC может включать в себя контрольное поле кадра, поле длительность/ID, адресное поле, и т.д. Контрольное поле кадра может включать в себя реквизит контрольной информации для передачи/прием кадра. Длительность/ID может устанавливаться как конкретное время для передачи соответствующего кадра или т.п. Подробное описание субполей контроля последовательности, контроля QoS и HT контроля заголовка MAC может ссылаться на документы стандарта IEEE802.11-2012.
Контрольное поле кадра заголовка MAC может включать в себя субполя: версия протокола, тип, субтип, к DS, от DS, дополнительный фрагмент, повторная попытка, управление энергопотреблением, дополнительные данные, защищенный кадр и порядок. Подробное описание отдельных субполей контрольного поля кадра может ссылаться на документы стандарта IEEE 802.11-2012.
С другой стороны, формат кадра пакет с нулевыми данными (NDP) может указывать формат кадра, не имеющий пакет данных. То есть NDP кадр включает в себя часть заголовка PLCP (то есть поля STF, LTF и SIG) общего формата PPDU, тогда как он не включает оставшиеся части (то есть поле данных). Упомянутый NDP кадр может называться как короткий формат кадра.
Усечение TXOP
Если станция (STA), способная получать доступ к каналу, может сделать пустой свою собственную последовательность передачи с использованием EDCA, то длительность оставшего времени является достаточной для передачи кадра, конечный кадр окончания бессостязательного периода (CF-END) может передаваться. Посредством передачи упомянутого CF-END кадра, соответствующая станция (STA) может явным образом представлять конец своей возможности передачи (TXOP). В этом случае, возможность TXOP определяется как временной интервал, для которого конкретная станция (STA) имеет право инициировать обмен кадрами по радио среде, и упомянутый временной интервал может устанавливаться посредством начальной временной точки и максимального значения интервала.
Обладатель TXOP, конфигурируемый, чтобы передавать CF-END кадр, не должен инициировать последовательность дополнительного обмена кадрами в пределах текущей возможности TXOP.
Не-AP станция, но не обладатель TXOP, не должна передавать CF-END кадр.
Станция (STA), которая приняла упомянутый CF-END кадр, может интерпретировать CF-END кадр как возврат NAV в исходное состояние. То есть соответствующая станция (STA) может возвратить NAV таймер на ноль в конце времени единицы данных (например, PPDU), включающей в себя CF-END кадр.
Если точка доступа (AP) принимает CF-END кадр, имеющий BSSID, идентичный BSSID точки доступа (AP), то она передает упомянутый CF-END кадр после того, как прекращается время SIFS для того, чтобы ответить на CF-END кадр.
Передача одного CF-END кадра посредством обладателя TXOP может вернуть в исходное состояние NAV станции (STA), способной прослушивать передачу соответствующего обладателя TXOP. Поскольку станция (STA) не может прослушивать CF-END кадр с использованием возврата NAV в исходное состояние, может быть другая станция (STA), способная прослушивать передачу ответчика TXOP, конфигурируемого для возврата в исходное состояние упомянутого NAV. (Например, упомянутая ситуация скрытого узла). Станции (STA) могут предотвращать состязание в среде перед окончанием первоначального NAV резервирования.
Фиг. 14 является концептуальной графической схемой, иллюстрирующей пример усечения TXOP.
Станция (STA) может получать доступ к упомянутой среде с использованием EDCA доступа к каналу. После этого станция (STA) может передавать последовательность настроек NAV (например, RTS/CTS). После того, как прекращается время SIFS, станция (STA) передает упомянутую последовательность инициатора, так что передача/прием множества единиц PPDU может осуществляться между обладателем TXOP и ответчиком TXOP. В конце времени последовательности PPDU передачи/приема, если обладатель TXOP не имеет данные, подходящие для передачи в пределах соответствующей TXOP, то станция-обладатель TXOP передает упомянутый CF-END кадр, для того чтобы провести усечение работы TXOP.
Станции (STA), которые приняли упомянутый CF-END кадр, могут возвращать в исходное состояние их векторы NAV и могут по этой причине инициировать состязание в среде без использования дополнительной задержки.
Как описано выше, если станция (STA), приобретающая возможность TXOP, больше не имеет данных, предназначенных для передачи, то обладатель TXOP (или владелец TXOP) может произвести усечение упомянутой TXOP работы посредством широковещательной передачи CF-END кадра. Каждая станция, которая приняла упомянутый CF-END кадр, возвращает в исходное состояние вектор NAV, и может инициировать доступ к каналу (или состязание в канале) после того, как прекращается CF-END кадр.
СТРУКТУРА КАРТЫ TIM
В способе работы и управления энергосберегающего (PS) режима на основе TIM (или DTIM) протокола, изображенного на фигурах с Фиг. 9 по Фиг. 12, станция (STA) может определить присутствие или отсутствие кадра данных, предназначенного для передачи для станции (STA) через информацию идентификации станции (STA), содержащейся в TIM элементе. Информация идентификации станции (STA) может быть конкретной информацией, связанной с идентификатором ассоциации (AID), предназначенном для назначения, когда станция (STA) связана с точкой доступа (AP).
Идентификатор AID используется как уникальный идентификатор (ID) каждой станции (STA) в пределах одного набора BSS. Например, идентификатор AID для использования в текущей WLAN системе может назначаться один из диапазона с 1 по 2007. В случае текущей WLAN системы, 14 бит для AID может назначаться кадру, передаваемому посредством точки доступа (AP) и/или станции (STA). Хотя значение идентификатора AID может назначаться максимально 16383, значения из диапазона 2008 ~ 16383 устанавливаются на резервные значения.
Упомянутый TIM элемент в соответствии с унаследованным определением является неподходящим для применения M2M приложения, через которое много станций (STA) (например, по меньшей мере 2007 станций (STA)) ассоциируются с одной точкой доступа (AP). Если традиционная TIM структура расширяется без какого-либо изменения, размер TIM битовой карты чрезмерно увеличивается, так что невозможно для поддержки расширенной TIM структуры использовать унаследованный формат кадра, и упомянутая расширенная TIM структура является неподходящей для M2M связи, в которой приложение низкой скорости передачи данных рассматривается. В дополнение, ожидается, что имеется очень небольшое число станций (STA), каждая имеющая кадр принимаемых (Rx) данных в течение одного маячкового периода. По этой причине, в соответствии с примерным приложением упомянутой выше M2M связи, ожидается, что упомянутый размер TIM битовой карты увеличивается, и большинство бит устанавливаются на ноль (0), так что требуется технология, способная эффективно сжимать такую битовую карту.
В унаследованной технологии сжатия битовой карты, последующие значения (каждое из которых устанавливается на ноль) 0 пропускаются из части заголовка битовой карты, и пропущенный результат может определяться как значение смещения (или начальная точка). Однако, хотя число станций (STA), каждая включающая в себя буферизованный кадр, является небольшим, если имеется большое различие между AID значениями соответствующих станций (STA), эффективность сжатия не является высокой. Например, предполагая, что упомянутый кадр, предназначенный для передачи только к первой станции (STA), имеющей AID 10, и второй станции (STA), имеющей AID 2000, буферизуется, длина сжатой битовой карты устанавливается на 1990, оставшимся частям отличающимся от обоих крайних частей, назначается ноль (0). Если число станций (STA), ассоциированных с одной точкой доступа (AP), небольшое, неэффективность сжатия битовой карты не вызывает серьезные проблемы. Однако, если число станций (STA), ассоциированных с одной точка доступа (AP) увеличивается, то такая неэффективность может ухудшать пропускную способность всей системы.
Для того чтобы решить упомянутые выше проблемы, идентификаторы AID делятся на множество групп, так что данные могут более эффективно передаваться с использованием идентификаторов AID. Назначаемый идентификатор группы (GID) назначается для каждой группы. Идентификаторы AID, назначаемые на основе такой группы, будут здесь далее описаны со ссылкой на Фиг. 13.
Фиг. 15(a) является концептуальной графической схемой, иллюстрирующей основанный на группе идентификатор AID. На Фиг. 13(a), некоторые биты, размещаемые в передней части AID битовой карты могут использоваться, чтобы указывать идентификатор группы (GID). Например, является возможным назначить четыре идентификатора GID с использованием первых двух бит AID битовой карты. Если общая длина AID битовой карты обозначается посредством N бит, то первые два бита (B1 и B2) могут представлять GID соответствующего идентификатора AID.
Фиг. 15(b) является концептуальной графической схемой, иллюстрирующей основанный на группе идентификатор AID. На Фиг. 15(b), идентификатор GID может быть назначаем в соответствии с позицией AID. В этом случае, идентификаторы AID, имеющие тот же GID могут представляться посредством значений смещения и длины. Например, если GID1 обозначается посредством смещения A и длины B, это означает, что идентификаторы AID (A ~ A+B-1) на битовой карте, соответственно, устанавливаются на GID 1. Например, на Фиг. 15(b) предполагается, что идентификаторы AID (1 ~ N4) делятся на четыре группы. В этом случае, идентификаторы AID, содержащиеся в GID1, обозначаются 1 ~ N1, и идентификаторы AID, содержащиеся в этой группе, могут представляться посредством смещения 1 и длины N1. Идентификаторы AID, содержащиеся в GID2, могут представляться посредством смещения (N1+1) и длины (N2- N1+1), идентификаторы AID, содержащиеся в GID3, могут представляться посредством смещения (N2+1) и длины (N3-N2+1), и идентификаторы AID, содержащиеся в GID4, могут представляться посредством смещения (N3+1) и длины (N4-N3+1).
В случае с использованием вышеупомянутых основанных на группе идентификаторов AID, доступ к каналу разрешается в различные временные интервалы в соответствии с отдельными идентификаторами GID, упомянутая проблема, вызванная недостаточным числом TIM элементов, сравниваемых с большим числом станций (STA), может быть решена, и в то же время данные могут эффективно передаваться/приниматься. Например, в течение конкретного временного интервала, доступ к каналу разрешается только для станции STA (станций), соответствующих конкретной группе, и доступ к каналу для остальной станции STA (станций) может не разрешаться. Предварительно определенный временной интервал, для которой доступ только для конкретной станции STA (станций) разрешается, может также называться как ограниченное окно доступа (RAW).
Доступ к каналу на основе GID будет здесь далее описан со ссылкой на Фиг. 15(c). Если идентификаторы AID делятся на три группы, то упомянутый механизм доступа к каналу в соответствии с маячковым интервалом примерно изображен Фиг. 15(c). Первый маячковый интервал (или первое окно RAW) является конкретным интервалом, для которой доступ к каналу для станции (STA), соответствующей AID, содержащемуся в GID1, разрешается, и доступ к каналу станции (STA), содержащейся в других GID не разрешается. Для осуществления упомянутой выше структуры, TIM элемент используется только для идентификаторов AID, соответствующих GID1 содержится в первом маячковом кадре. TIM элемент, используемый только для идентификаторов AID, соответствующих GID2, содержится во втором маячковом кадре. Соответственно, только доступ к каналу для станции (STA), соответствующей AID, содержащемуся в GID2, разрешается в течение второго маячкового интервала (или второго окна RAW). TIM элемент, используемый только для идентификаторов AID, имеющих GID3, содержится в третьем маячковом кадре, так что доступ к каналу для станции (STA), соответствующей AID, содержащемуся в GID3, разрешается с использованием третьего маячкового интервала (или третьего окна RAW). TIM элемент, используемый только для идентификаторов AID, каждый имеющий GID1, содержится в четвертом маячковом кадре, так что доступ к каналу для станции (STA), соответствующей AID, содержащемуся в GID1, разрешается с использованием четвертого маячкового интервала (или четвертого окна RAW). После этого только доступ к каналу для станции (STA), соответствующей конкретной группе, указываемой посредством упомянутой карты TIM, содержащейся в соответствующем маячковом кадре, может быть разрешен в каждом из маячковых интервалов, следующих за пятым маячковым интервалом (или в каждом из окон RAW, следующих за пятым окном RAW).
Хотя Фиг. 15(c) примерно изображает, что порядок разрешаемых идентификаторов GID является периодическим или циклическим в соответствии с упомянутым маячковым интервалом, область действия или идея настоящего изобретения не ограничивается этим. То есть только идентификатор AID (идентификаторы AID), содержащийся в конкретном идентификаторе GID (идентификаторах GID), может содержаться в TIM элементе, так что доступ к каналу для станции STA (станций), соответствующей конкретному идентификатору AID (идентификаторам AID), разрешается в течение конкретного временного интервала (например, конкретного окна RAW), и доступ к каналу для оставшейся станции STA (станций STA) не разрешается.
Фиг. 16 является концептуальной графической схемой, иллюстрирующей основанный на группе доступ к каналу.
Как описано выше, когда по меньшей мере одна группа конфигурируется на основе идентификатора AID и позволяет выполнять доступ к каналу в течение временного интервала для каждой группы, конкретный временной интервал (то есть временной интервал всего доступа к каналу) для которой доступ к каналу всех станций (STA) может устанавливаться. Альтернативно, в течение упомянутого временного интервала всего доступа к каналу, только станция (STA), не связанная с точкой доступа (AP) может передавать упомянутый кадр к точке доступа (AP) через доступ к каналу без ограничения.
Если временной интервал, для которой доступ к каналу станции (STA), содержащейся в конкретной группе разрешается, как показано на Фиг. 16(a), устанавливается в единицах маячкового интервала, то упомянутый конкретный маячковый интервал может устанавливаться на интервал доступа ко всем каналам.
Некоторые временные интервалы, содержащиеся в одном маячковом интервале, могут устанавливаться на временной интервал доступа ко всем каналам, как показано на Фиг. 16(b), и некоторые другие части могут устанавливаться на временной интервал разрешаемого доступа к каналу станции (STA), содержащейся в конкретной группе.
Упомянутый временной интервал основанного на группе доступа к каналу, изображенный на Фиг. 16(c), может устанавливаться посредством деления одного маячкового интервала на несколько секций. Например, предполагая, что идентификаторы AID классифицируются на три группы, один маячковый интервал может быть разделен на четыре временных интервала. В этом случае, один из упомянутых четырех временных интервалов может устанавливаться на временной интервал доступа ко всем каналам, и оставшиеся три временных интервала могут быть назначены отдельным группам, соответственно.
Дополнительный временной интервал может устанавливаться на один маячковый интервал, как показано на Фиг. 16(d). Например, предполагая, что идентификаторы AID классифицируются на три группы, один маячковый интервал может быть разделен на 6 временных интервалов. Три временных интервала из числа 6 временных интервала могут назначаться отдельным группам, соответственно, и оставшиеся 3 интервала могут назначаться всем временным интервалам доступа ко всем каналам. Хотя Фиг. 16(d) альтернативно изображает временные интервалы, назначаемые для каждой группы, и упомянутые временные интервалы доступа ко всем каналам, область действия или идея настоящего изобретения не ограничивается этим и может применяться для других примеров без изменения.
Вышеупомянутая, основанная на группе идентификаторов AID, схема назначения может также называться как иерархическая структура карты TIM. То есть общее AID пространство делится на множество блоков, и доступ к каналу для станции STA (станций) (то есть станция STA (станции) конкретной группы), соответствующие конкретному блоку, имеющему какое-либо одно из упомянутых оставшихся значений, отличных от '0', может разрешаться. По этой причине, карта TIM большого размера делится на блоки/группы небольшого размера, станции (STA) могут легко поддерживать TIM информацию, и блоки/группы могут легко управляться в соответствии с классом, качеством обслуживания (QoS) или использованием станции STA. Хотя Фиг. 15 примерно изображает 2-уровневый уровень, иерархическая TIM структура, составленная из двух или более уровней, может конфигурироваться. Например, полное AID пространство может быть разделено на множество групп страниц, каждая группа страниц может быть разделена на множество блоков, и каждый блок может быть разделен на множество суб-блоков. В этом случае, в соответствии с упомянутой версией расширенной структуры Фиг. 15(a), первые N1 бит AID битовой карты могут представлять идентификатор страницы (page ID) (то есть PID), следующие N2 бит могут представлять идентификатор ID блока, следующие N3 бит могут представлять идентификатор ID суб-блока, и оставшиеся биты могут представлять позиции бит станции (STA), содержащихся в суб-блоке.
В примерах настоящего изобретения, различные схемы для деления станций (STA) (или идентификаторов AID, назначаемых соответствующим станциям STA) на предварительно определенные единицы иерархической группы, и управление результатом, полученным в результате деления, может применяться к вариантам осуществления, однако, упомянутая основанная на группе схема назначения идентификаторов AID не ограничивается упомянутыми выше примерами.
УСЕЧЕНИЕ TXOP В ОКНЕ RAW
Как показано на фигурах Фиг. 15 и 16, предполагая, что доступ к каналу временного интервала классифицируется на первый временной интервал (например, окно RAW, назначаемое для конкретной группы), в котором только станция (STA), содержащаяся в конкретной группе является разрешаемой с ограничением, и второй временной интервал (например, временной интервал доступа ко всем каналам), в котором использование всех станций (STA) или одной станции (STA), не связанных с точкой доступа (AP), разрешается, доступ к каналу станции (STA), в котором использование соответствующего интервала для каждого временного интервала доступа к каналу разрешается, требует защиты.
Конкретный временной интервал, для которой доступ к каналу для станции (STA), содержащейся в конкретной группе, разрешается с ограничением, называется как ограниченное окно доступа (RAW). Доступ к каналу для других станций (STA), отличающихся от некоторых станций (STA), в которых доступ к каналу для конкретного окна RAW разрешается, не разрешается. Другая станция STA (станции) должны устанавливать вектор распределения сети (NAV) для конкретного времени, соответствующего окну RAW. Соответственно, другая станция STA (станции) могут не пытаться выполнить доступ к каналу в течение конкретного времени, соответствующего окну RAW.
Фиг. 17 является концептуальной графической схемой, иллюстрирующей примерный формат информационного элемента (IE) набора параметров окна RAW.
На Фиг. 17, поле идентификатора (ID) элемента может устанавливаться на конкретное значение, указывающее, что соответствующий информационный элемент (IE) является информационным элементом (IE) набора параметров RAQ (RAQ parameter set, RPS).
Поле длины может устанавливаться на конкретное значение, указывающее длину следующих полей.
Поле GID может устанавливаться на конкретное значение, указывающее станции (STA), в которых доступ к каналу разрешается для временного интервала, назначаемого посредством смещения начала окна ограниченного доступа и длительности окна ограниченного доступа.
Поле смещения начала окна ограниченного доступа может устанавливаться на конкретное значение, указывающее начальную точку упомянутого окна RAW. Например, конечное время маячкового кадра может устанавливаться на значение смещения времени окна RAW.
Поле длительности окна ограниченного доступа может устанавливаться на конкретное значение, указывающее длительность упомянутого окна RAW.
Точка доступа (AP) может передавать информационный элемент (IE) набора параметров окна RAW (RPS) к станции (STA) через маячковый кадр и т.д., как показано на Фиг. 17. Доступ к каналу только для некоторых станций (STA) (или содержащихся в соответствующем GID) среди множества станций (STA), которые приняли упомянутый RPS IE, разрешается, и станции (STA) (или не содержащиеся в соответствующем GID) не назначаемые соответствующему окну RAW, могут устанавливать упомянутый вектор NAV в течение окна RAW.
Станция (STA), в которой доступ к каналу разрешается для времени окна RAW, может пытаться выполнить доступ к каналу через EDCA отсрочку. Например, если канал находится в свободном режиме в течение времени арбитражного межкадрового пространства (AIFS), то станция (STA) выполняет зондирование несущей в течение конкретного времени, соответствующего окну состязания. Если канал находится в свободном режиме, то станция (STA) может передавать кадр.
В этом случае, каждый из кадр контроля (например, RTS, CTS или ACK кадры и т.д.), кадр данных, кадр управления, и т.д. может включать в себя поле длительности. Другая станция STA (станции) но не станция (STA) назначения соответствующего кадра, среди множества станций (STA), которые приняли упомянутый выше кадр, могут устанавливать вектор NAV на основе значения поля длительности и затем откладывать доступ к каналу. Через упомянутый выше процесс конфигурации NAV, станция (STA), содержащаяся в скрытом узле, может не пытаться выполнить доступ к каналу при условии, что получившийся в результате физического зондирования канал (или среда) находится в свободном состоянии и упомянутый вектор NAV устанавливается, так что происходящий в настоящее время обмен кадрами не прерывается.
Через EDCA механизм, станция (STA), успешно выполнившая доступ к каналу через упомянутый EDCA механизм, может передавать один или более кадров в течение времени TXOP. В этом случае, TXOP защита станции (STA) может получаться через NAV конфигурацию другой станции STA (станций) через значение поля длительности, содержащееся в кадре передачи.
Как правило, возможность TXOP может устанавливать вектор NAV на предварительно определенное время, соответствующее пределу TXOP, независимо от фактического времени передачи пользовательского оборудования (UE). Если кадры, предназначенные для передачи, больше не присутствуют, то такой кадр, как кадр CF-END передается, так что другая станция (STA) может распознать отсутствие кадров и может выполнить возврат в исходное состояние вектора NAV. Возврат NAV в исходное состояние конкретной станции (STA) может указывать на то, что соответствующая станция (STA) может пытаться выполнить доступ к каналу (то есть соответствующая станция (STA) может начать состязаться за упомянутую среду без дальнейшей задержки).
После того, как станция (STA), назначаемая для конкретного окна RAW, выполняет доступ к каналу через упомянутый EDCA механизм, соответствующая станция (STA) может предположить, что соответствующие станции (STA) передают упомянутый CF-END кадр, чтобы выполнить усечение их TXOP. Упомянутый CF-END кадр используется, когда другие станции (STA), содержащиеся в окне RAW распознают усечение возможности TXOP станции (STA), служащей как обладатель TXOP, и пытаются выполнить доступ к каналу. Однако, в соответствии с упомянутым традиционным механизмом усечения TXOP, векторы NAV всех других станций (STA), которые приняли упомянутый CF-END кадр, возвращаются в исходное состояние. То есть посредством CF-END кадра, передаваемого от конкретной станции (STA) при условии, что длительность конкретного окна RAW еще не завершена, векторы NAV других станций (STA), не назначаемых для конкретного окна RAW, могут быть возвращены в исходное состояние. В этом случае, хотя другие станции (STA) не являются назначаемыми для конкретного окна RAW, попытка доступа к каналу может произойти в конкретном окне RAW из-за возврата вектора NAV в исходное состояние.
В соответствии с упомянутым вариантом осуществления, предполагая, что предварительно определенный временной интервал, в котором только доступ к каналу конкретной станции STA (станций), разрешаемый с ограничением, устанавливается, усечение TXOP, выполняемое в предварительно определенный временной интервал, может выполняться только для конкретной станции STA (станций).
В следующих примерах настоящего изобретения, предварительно определенный временной интервал примерно обозначается 'RAW', и способ усечения TXOP настоящего изобретения может называться как 'усечение TXOP в RAW'. Однако область действия или идея настоящего изобретения не ограничивается этим, и настоящее изобретение может также применяться к способу осуществления сканирования усечения TXOP в пределах произвольного временного интервала, в котором только конкретная станция STA (станции) выполняет (выполняют) доступ к каналу через EDCA механизм.
В соответствии с одним примером способа 'усечения TXOP в RAW' настоящего изобретения, после того, как окно RAW устанавливается, хотя станция STA (станции), не содержащиеся в группе, назначаемой для окна RAW, принимает (принимают) CF-END кадр в течение RAW секции, станция STA (станции) могут игнорировать или отбрасывать принимаемый CF-END кадр. Игнорирование или отбрасывание упомянутого CF-END кадра может указывать на то, что вектор NAV не возвращается в исходное состояние в течение приема упомянутого CF-END кадра (то есть предварительно установленный вектор NAV поддерживается и доступ к каналу не пробуется). Тем временем, станция STA (станции), содержащиеся в группе, назначаемые для окна RAW, могут возвращать в исходное состояние вектор NAV при приеме упомянутого CF-END кадра в течение RAW секции (то есть может выполняться попытка доступа к каналу).
В соответствии с примером настоящего изобретения, упомянутое правило операции усечения TXOP может просто имплантироваться и станции (STA), назначаемые для окна RAW, могут защищаться. Тем временем, предполагая, что станции (STA), назначаемые для окна RAW, больше не имеют кадр, предназначенный для передачи, или кадр, предназначенный для приема, доступ к каналу другой станции (STA) запрещается в течение RAW секции, так что случай, в котором ни одна использует канал, может произойти. В этом случае, невозможно уменьшить время секции, соответствующей окну RAW, а также завершить упомянутый временной интервал, соответствующий окну RAW на ранних стадиях, пропускная способность системы может ухудшаться из-за снижения эффективности использования канала.
В соответствии с дополнительным примером способа 'усечения TXOP в RAW' настоящего изобретения, настоящее изобретение предлагает способ определения двух различных CF-END кадров.
CF-END кадр первого типа может конфигурироваться таким способом, что все станции (STA), принимающие соответствующий CF-END кадр, могут выполнять возврат NAV в исходное состояние. То есть одна станция (STA), назначаемая для окна RAW, и другая станция (STA), не назначаемая для упомянутого окна RAW, не различаются друг от друга, и конкретная информация, указывающая, что все станции (STA), которые приняли упомянутый CF-END кадр, должны выполнять возврат NAV в исходное состояние, может содержаться в соответствующем CF-END кадре.
CF-END кадр второго типа может называться как ограниченный CF-END кадр (то есть RCF-END кадр). RCF-END кадр может позволять только станции (STA), содержащейся в конкретной группе, выполнить возврат NAV в исходное состояние в течение конкретного времени (такого, как окно RAW), в котором доступ к каналу только станций (STA), содержащихся в конкретной группе, разрешается. Хотя другая станция STA (станции), не содержащиеся в конкретной группе, принимают упомянутый RCF-END кадр, другая станция STA (станции) могут работать таким способом, что NAV не возвращается в исходное состояние. Конкретная информация, указывающая, что только станция (STA) конкретной группы должна выполнять возврат NAV в исходное состояние, может содержаться в соответствующем CF-END кадре (то есть RCF-END кадре).
Фиг. 18 является концептуальной графической схемой, иллюстрирующей схему усечения TXOP в соответствии с одним вариантом осуществления настоящего изобретения.
На Фиг. 18, предполагается, что точка доступа (AP) устанавливает окно RAW для GID1 через упомянутый маячковый кадр. Станции STA1 и STA2, содержащиеся в группе GID1, могут передавать кадр после завершения операции отсрочки через упомянутый EDCA механизм в течение времени окна RAW упомянутого GID1. Станция STA3, не содержащаяся в GID1, может откладывать доступ к каналу посредством установления вектора NAV в течение GID1 RAW времени. То есть значение NAV, назначаемое станции STA3, может соответствовать длительности времени окна RAW.
Предполагается, что станция STA1 среди станции STA1 и станции STA2 сначала получает TXOP через упомянутый EDCA механизм. Соответственно, станция STA1 может выполнять RTS передачу и CTS прием, и станция STA2 может устанавливать вектор NAV через поле длительности, содержащееся в RTS/CTS кадре. Вектор NAV, устанавливаемый посредством станции STA2, может соответствовать пределу TXOP.
Станция STA1 может передавать кадр данных к A и принимать ACK кадр от точки доступа (AP). Если кадр, предназначенный для передачи, больше не присутствует, то станция STA1 может передавать RCF-END кадр (например, CF-END кадр второго типа, изображенный в примере настоящего изобретения). Станция STA2, которая приняла упомянутый RCF-END кадр, может выполнять возврат NAV в исходное состояние. То есть значение NAV, первоначально установленное в станции STA2, может соответствовать TXOP пределу, и конкретное значение повторно устанавливается, чтобы выполнить усечение NAV при времени завершения приема упомянутого RCF-END кадра.
Пока станция STA3 принимает упомянутый RCF-END кадр от станции STA1, станция STA3 может не выполнить возврат NAV в исходное состояние. То есть станция (STA), которая приняла упомянутый RCF-END кадр, может выполнять возврат NAV в исходное состояние только при конкретном условии (например, только ограниченные станции (STA) для использования в конкретном временном интервале, в котором только доступ к каналу ограниченных станций (STA) разрешается, могут выполнять возврат NAV в исходное состояние).
Станция STA2, ассоциированная с возвратом NAV в исходное состояние, может получить TXOP через упомянутый EDCA механизм, выполняет CTS прием RTS передачу и передает кадр данных. В соответствии с RTS передачей и CTS приемом станции STA2, вектор NAV станции STA1 может устанавливаться. Станция STA2 может передавать кадр данных к точке доступа (AP), и может принимать ACK кадр от упомянутой точки доступа (AP). Впоследствии точка доступа (AP) передает упомянутый CF-END кадр, чтобы выполнить усечение RAW. Упомянутый CF-END кадр, передаваемый от точки доступа (AP), может не различать между конкретным GID и станцией (STA), назначаемой для конкретного окна RAW, и предназначен для всех станций (STA) (например, CF-END кадр первого типа, изображенный в приведенном выше примере настоящего изобретения). Соответственно, все станции (STA), которые приняли упомянутый CF-END кадр от точки доступа (AP), могут выполнять возврат NAV в исходное состояние.
Упомянутый CF-END кадр (например, кадр CF-END первого типа или кадр CF-END второго типа (или RCF-END кадр)) для запуска различных операций может идентифицироваться посредством назначения различных значений полю типа кадра или полю суб-типа поля контроля кадра (FC). Альтернативно, хотя используются те же форматы кадров, конкретный кадр (например, поле длительности), неиспользуемый в CF-END кадре, может повторно использоваться или повторно определяться таким способом, что упомянутый CF-END кадр для запуска различных операций может отличаться.
Например, станция (STA), конфигурируемая, чтобы передавать CF-END кадр, может назначать нулевое '0' значение или ненулевое значение для поля длительности упомянутого CF-END кадра. Для того чтобы позволить всем станциям (STA), которые приняли упомянутый CF-END кадр, выполнить возврат NAV в исходное состояние (то есть для того, чтобы указывать кадр CF-END первого типа), поле длительности упомянутого CF-END кадра может устанавливаться на ноль. В противном случае, поле длительности упомянутого CF-END кадра может устанавливаться на ненулевое значение таким способом, что станции (STA) (например, станции (STA), для которых доступ к каналу разрешается в соответствующем окне RAW), конфигурируемые для удовлетворения конкретному условию, выполняют возврат NAV в исходное состояние, и другие станции (STA), не удовлетворяющие конкретному условию, могут не выполнять возврат NAV в исходное состояние (то есть для того чтобы указывать кадр CF-END второго типа), поле длительности упомянутого CF-END кадра может устанавливаться на ненулевое значение.
Станция (STA), которая приняла упомянутый CF-END кадр, может определяться следующим образом. Все станции (STA), которые приняли упомянутый CF-END кадр, включающий в себя поле длительности 0, могут выполнять возврат NAV в исходное состояние. В противном случае, станция (STA), которая приняла упомянутый CF-END кадр, включающий в себя упомянутое поле длительности, назначаемое для ненулевого значения, может выполнять возврат NAV в исходное состояние, когда выполняется конкретное условие. Если станция (STA), которая приняла упомянутый CF-END кадр, включающий в себя поле длительности, назначаемое для ненулевого значения, не удовлетворяет конкретному условию, то соответствующая станция (STA) может не выполнить возврат NAV в исходное состояние, и принимаемый CF-END кадр может игнорироваться или отбрасываться.
В соответствии с дополнительным предложением настоящего изобретения, когда поле длительности упомянутого CF-END кадра устанавливается на ненулевое значение, поле длительности может устанавливаться на ненулевое значение, соответствующее значению NAV для возврата в исходное состояние, вместо назначения произвольного ненулевого значения для поля длительности. В этом случае, станция (STA), которая приняла упомянутый CF-END кадр, может уменьшить упомянутое значение NAV, когда значение поля длительности упомянутого CF-END кадра равно или меньше, чем значение NAV, в настоящее время назначаемое станции (STA) (то есть NAV возвращается в исходное состояние). В противном случае, если значение поля длительности упомянутого CF-END кадра, принимаемое посредством станции (STA) является большим, чем значение NAV, то значение NAV не уменьшается (то есть NAV не возвращается в исходное состояние). То есть конкретное условие для использования в CF-END кадре (или RCF-END кадре, изображенном в приведенном выше примере), в котором только станция (STA), удовлетворяющая конкретному условию, выполняет возврат NAV в исходное состояние, может указывать, что значение, назначаемое посредством поля длительности, является равным или меньше, чем значение NAV, назначаемое для станции (STA), которая приняла упомянутый CF-END кадр.
Поле длительности упомянутого CF-END кадра (или RCF-END кадра), изображенного на Фиг. 18, может устанавливаться на конкретное значение, указывающее оставшееся время возможности TXOP, инициируемой станцией STA1. То есть поскольку поле длительности упомянутого CF-END кадра, передаваемого от станции STA1, является равным или меньше, чем значение NAV, назначаемое для станции STA2, станция STA2 может выполнять возврат NAV в исходное состояние. В противном случае, значение NAV, назначаемое для станции STA3, может соответствовать длительности времени RAW секции. Соответственно, станция STA3, которая приняла упомянутый CF-END кадр от станции STA1, может не выполнить возврат NAV в исходное состояние, поскольку значение поля длительности упомянутого CF-END кадра является большим, чем значение NAV станции STA3. Если станция STA3 принимает CF-END кадр (то есть CF-END кадр, в котором значение поля длительности устанавливается на ноль) от точки доступа (AP), то станция STA3 выполняет возврат NAV в исходное состояние.
В дополнение, в соответствии с дополнительным предложением настоящего изобретения, в соответствии с примером, в котором поле длительности упомянутого CF-END кадра устанавливается на ненулевое значение, поле длительности может устанавливаться на ненулевое значение, соответствующее значению NAV для возврата в исходное состояние, вместо назначения произвольного ненулевого значения полю длительности. Здесь, станция (STA), которая приняла упомянутый CF-END кадр, сравнивает значение поля длительности упомянутого CF-END кадра с текущим значением NAV, назначаемым для станции STA. Если два значения являются идентичными друг другу, то значение NAV уменьшается (то есть NAV возвращается в исходное состояние). В противном случае, если значение поля длительности упомянутого CF-END кадра, принимаемого посредством станции (STA), отличается от значения NAV, то упомянутое значение NAV не уменьшается (то есть NAV не возвращается в исходное состояние). То есть конкретное условие для использования в CF-END кадре (или RCF-END кадре, изображенном в приведенном выше примере), в котором только станция (STA), удовлетворяющая конкретному условию, выполняет возврат NAV в исходное состояние, может указывать, что значение, назначаемое посредством поля длительности, равно значению NAV, назначаемому для станции (STA), которая приняла упомянутый CF-END кадр.
Поле длительности упомянутого CF-END кадра (или RCF-END кадра), передаваемого от станции STA1, изображенное на Фиг. 18, может устанавливаться на конкретное значение, указывающее оставшееся время возможности TXOP, инициируемой станцией STA1. То есть значение поля длительности упомянутого CF-END кадра, передаваемого от станции STA1, является идентичным значению NAV, назначаемому для станции STA2. Соответственно, станция STA2, которая приняла упомянутый CF-END кадр, передаваемый посредством станции STA1, сравнивает значение поля длительности упомянутого CF-END кадра со значением NAV станции STA2, и упомянутые два значения являются идентичными друг другу, так что значение NAV станции STA2 может быть возвращено в исходное состояние. В противном случае, значение NAV, назначаемое для станции STA3, может соответствовать длительности времени RAW секции. Соответственно, станция STA3, которая приняла упомянутый CF-END кадр, передаваемый от станции STA1, сравнивает значение поля длительности упомянутого CF-END кадра с упомянутым значением NAV станции STA1. Здесь, упомянутые два значения отличаются друг от друга, станция STA3 может не возвращать в исходное состояние ее собственный вектор NAV. Если станция STA3 принимает CF-END кадр (то есть CF-END кадр, в котором ноль назначается полю длительности) от точки доступа (AP), то станция STA3 выполняет возврат NAV в исходное состояние.
В этом случае, когда определение того, осуществлен ли возврат NAV в исходное состояние станции (STA), выполняеется посредством сравнения текущего значения NAV со значением поля длительности упомянутого CF-END кадра, точность функции временной синхронизации (TSF) станции (STA) следует учитывать. Например, если поле длительности упомянутого CF-END кадра указывает 50 мс (или 50,000 мкс), это означает, что соответствующий кадр завершается, и NAV должен возвращаться в исходное состояние после прекращения 50 мс. В случае использования станции (STA), в которой нормальный вектор NAV конфигурируется на основе значения поля длительности, содержащегося в кадре, передаваемого от упомянутого обладателя TXOP, TSF обладателя TXOP и TSF станции (STA) могут иметь ошибки таймера. В этом случае, хотя станция STA1, изображенная на Фиг. 9, назначает конкретное значение, указывающее TXOP оставшееся время для поля длительности упомянутого CF-END кадра, это значение может отличаться от текущего значения NAV станции STA2 (то есть хотя предполагается, что значение NAV, определяемое посредством станции STA2, является идентичным конкретному значению, указывающему TXOP оставшееся время в соответствии с первоначальным намерением станции STA1, ошибки TSF могут происходить в станции STA1 и станции STA2, так что два значения могут отличаться друг от друга). Как описано выше, поскольку могут возникать ошибки в соответствии с точностью таймера TSF, значения разницы (то есть +/- дельта) в пределах предварительно определенного диапазона должны рассматриваться являющимися тем же значением, так что результирующее значение может более подходящим образом использоваться для первоначального усечения TXOP и доступа к каналу другой станции (STA), содержащейся в окне RAW. Здесь вектор NAV вычисляется/определяется в единицах микросекунд, и дельта может устанавливаться на натуральное число (например, несколько микросекунд), учитывая ошибки таймера TSF.
Соответственно, предполагая, что ненулевое значение поля длительности CF-END кадра, принимаемого посредством конкретной станции (STA), является идентичным любому значению из предварительно определенного диапазона (например, от 'значения NAV – дельта' до 'значения NAV+дельта') на основе значения NAV станции (STA), вектор NAV возвращается в исходное состояние, и может запускаться состязание за среду (или может выполняться попытка доступа к каналу). В противном случае, предполагая, что ненулевое значение поля длительности упомянутого CF-END кадра, принимаемого посредством конкретной станции (STA), отличается от любого значения из предварительно определенного диапазона (например, от 'значения NAV – дельта' до 'значения NAV + дельта') на основе значения NAV станции (STA), NAV не возвращается в исходное состояние и упомянутый CF-END кадр может игнорироваться или отбрасываться.
Фиг. 19 является концептуальной графической схемой, иллюстрирующей схему усечения TXOP в соответствии с другим вариантом осуществления настоящего изобретения.
На Фиг. 19, предполагается, что окно RAW устанавливается, станции STA1 и STA2 могут предоставлять доступ к каналу для окна RAW, и имеется станция (STA) третьей стороны, для которой доступ к каналу окна RAW не предоставляется.
После этого получившая разрешение станция STA1 (то есть обладатель TXOP), имеющая полученную возможность TXOP в окне RAW, передает кадр (кадры) данных и принимает ACK кадр от точки доступа (AP), предполагая, что кадр, предназначенный для передачи, больше не присутствует, получившая разрешение станция STA1 может передавать упомянутый CF-END кадр. Здесь, поле длительности упомянутого CF-END кадра, передаваемого от упомянутой получившей разрешение станции STA1 может устанавливаться на значение оставшегося времени временного интервала TXOP, определяемого станцией STA1 с точки зрения обладателя TXOP (например, временной интервал TXOP может устанавливаться через RTS передачу и CTS прием перед передачей кадра данных). Получившая разрешение станция STA2, которая приняла упомянутый CF-END кадр, передаваемый от станции STA1, может сравнивать значение поля длительности упомянутого CF-END кадра со своим значением NAV. Если два значения являются идентичными друг другу в соответствии с упомянутым результатом сравнения (или если значением поля длительности содержится в диапазоне 'значение NAV +/- дельта'), то станция STA2 может выполнять возврат NAV в исходное состояние.
При ассоциации со станцией (STA) третьей стороны, для которой доступ к каналу для окна RAW не предоставляется, NAV соответствующей RAW секции может устанавливаться через упомянутый маячковый кадр, и т.д. Соответственно, если станция (STA) третьей стороны принимает CF-END кадр от упомянутой получившей разрешение станции STA1, то она сравнивает значение поля длительности упомянутого CF-END кадра со своим значением NAV. Если два значения отличаются друг от друга в соответствии с упомянутым результатом сравнения (или если значение поля длительности не содержится в диапазоне значение NAV +/- дельта'), то станция (STA) третьей стороны может не возвращать в исходное состояние упомянутый вектор NAV и может отбрасывать упомянутый CF-END кадр.
Если получившая разрешение станция STA2, которая подтверждает значение поля длительности упомянутого CF-END кадра, передаваемого от упомянутой получившей разрешение станции STA1, и выполняет возврат NAV в исходное состояние, пытается выполнить доступ к каналу (например, через отсрочку), то получившая разрешение станция STA2 передает RTS, принимает CTS и передает кадр данных (DATA) к точке доступа (AP). В ответ на передачу кадра данных, станция STA2 может принимать ACK кадр от точки доступа (AP). После этого точка доступа (AP) может передавать упомянутый CF-END кадр для того, чтобы завершить окно RAW.
Здесь поле длительности упомянутого CF-END кадра, передаваемого от точки доступа (AP), может устанавливаться на конкретное значение, соответствующее длине оставшейся RAW секции. Если станция (STA) третьей стороны принимает CF-END кадр от точки доступа (AP), то упомянутое значение поля длительности упомянутого CF-END кадра может сравниваться со значением NAV станции STA третьей стороны. Если два значения являются идентичными друг другу в соответствии с упомянутым результатом сравнения (или если значение поля длительности не содержится в диапазоне 'значение NAV +/- дельта'), то станция (STA) третьей стороны может выполнять возврат NAV в исходное состояние и пытаться выполнить доступ к каналу. Тем временем, станции STA1 и STA2 могут не пытаться выполнить доступ к каналу, поскольку NAV не является установленным, и нет больше данных, предназначенных для передачи, которые присутствуют в RAW секции. Соответственно, хотя станции STA1 и STA2 принимают CF-END кадр от точки доступа (AP), станция STA1 и станция STA2 могут игнорировать или отбрасывать значение поля длительности, поскольку упомянутое значение поля длительности отличается от упомянутого значения NAV.
Альтернативно, полю длительности упомянутого CF-END кадра, принимаемого от точки доступа (AP), может назначаться нулевое значение, и все станции (STA) (например, станция STA1, станция STA2, и станция STA третьей стороны), принимающие значение поля длительности, могут выполнять возврат NAV в исходное состояние.
Фиг. 20 является концептуальной графической схемой, иллюстрирующей схему усечения TXOP в соответствии с другим вариантом осуществления настоящего изобретения.
Ситуация скрытого узла может часто происходить в ответ на увеличение покрытия, предоставляемое сетью WLAN (например, WLAN система для предоставления покрытия 1 км или больше). При ситуации скрытого узла, другая станция (STA) (то есть станция (STA), остающаяся в связи скрытого узла, связанного с обладателем TXOP) может не слушать CF-END кадр, передаваемый от упомянутого обладателя TXOP. По этой причине, даже когда усечение TXOP происходит из-за того, что обладатель TXOP передает упомянутый CF-END кадр, некоторые части другой станции (STA) не распознают усечение TXOP, ожидают усечение в настоящее время установленной TXOP, и затем задерживает их передачу. Для того чтобы решить упомянутую выше проблему, точка доступа (AP), которая приняла упомянутый CF-END кадр от упомянутого обладателя TXOP, передает с помощью широковещательной передачи соответствующий CF-END кадр еще раз, и точка доступа (AP) может информировать другие станции (STA), чтобы не слушать упомянутый CF-END кадр усечения TXOP. Может быть возможным информировать другие станции (STA), которые не слушают упомянутый CF-END кадр, принимаемый от упомянутого обладателя TXOP, об усечении TXOP. Соответственно, станция (STA), служащая как скрытый узел, связанный с обладателем TXOP, может выполнять возврат NAV в исходное состояние и пытаться выполнить доступ к каналу.
На Фиг. 20 предполагается, что окно RAW устанавливается, станции STA1, STA2 и STA3 конфигурируются для предоставления доступа к каналу в упомянутом выше окне RAW. Здесь предполагается, что получившая разрешение станция STA1 работает как скрытый узел получившей разрешение станции STA3, и получившая разрешение станция STA3 работает как скрытый узел получившей разрешение станции STA1. Соответственно, станция STA2 слушает RTS кадр, принимаемый от станции STA1, и устанавливает вектор NAV в соответствии с значением длительности, тогда как станция STA3 слушает CTS кадр точки доступа (AP) и устанавливает вектор NAV в соответствии со значением длительности.
После того, как получившая разрешение станция STA1 (то есть обладатель TXOP), получившая возможность TXOP в окне RAW, передает кадр (кадры) данных и принимать ACK кадр от точки доступа (AP), предполагая, что кадр, предназначенный для передачи, больше не присутствует, упомянутая получившая разрешение станция STA1 может передавать CF-END кадр. Здесь, поле длительности упомянутого CF-END кадра, передаваемое от упомянутой получившей разрешение станции STA1 может устанавливаться на значение оставшегося времени временного интервала TXOP, определяемого посредством станции STA1 с точки зрения обладателя TXOP (например, упомянутый временной интервал TXOP может устанавливаться через RTS передачу и CTS прием перед передачей кадра данных). Получившая разрешение станция STA2, которая приняла упомянутый CF-END кадр, передаваемый от станции STA1, может сравнивать значение поля длительности упомянутого CF-END кадра со своим значением NAV. Если упомянутые два значения являются идентичными друг другу в соответствии с упомянутым результатом сравнения (или если значение поля длительности содержится в диапазоне 'значение NAV +/- дельта'), то станция STA2 может выполнять возврат NAV в исходное состояние.
Поскольку получившая разрешение станция STA3 работает как скрытый узел получившей разрешение станции STA1, то получившая разрешение станция STA3 может не принимать упомянутый CF-END кадр от упомянутой получившей разрешение станции STA1. Тем временем, точка доступа (AP), которая приняла упомянутый CF-END кадр от упомянутой получившей разрешение станции STA1, может осуществлять широковещательную передачу соответствующего CF-END кадра. Соответственно, упомянутая получившая разрешение станция STA3 может принимать CF-END кадр, широковещательный посредством точки доступа (AP).
Здесь поле длительности упомянутого CF-END кадра, широковещательного посредством точки доступа (AP), может устанавливаться на конкретное значение, указывающее такую же временную синхронизацию, как временная синхронизация поля длительности упомянутого CF-END кадра, принимаемого от станции STA1. Поскольку время начала передачи упомянутого CF-END кадра станции STA1 отличается от времени начала передачи упомянутого CF-END кадра, индивидуальные поля длительности могут устанавливаться на то же значение. Другими словами, предполагая, что значение оставшегося времени среди временного интервала TXOP, устанавливаемого посредством станции STA1, служащей как обладатель TXOP, обозначается посредством 'A' (например, упомянутый временной интервал TXOP устанавливается посредством RTS передачи и CTS приема перед передачей кадра данных), поле длительности упомянутого CF-END кадра, передаваемого посредством станции STA 1 устанавливается на A. Тем временем, поле длительности упомянутого CF-END кадра, широковещательного посредством точки доступа (AP), может устанавливаться на значение 'A - TxTime(CF-END) - SIFS'. Здесь, время передачи TxTime (CF-END) может соответствовать длительности времени, расходуемой для передачи упомянутого CF-END кадра.
Получившая разрешение станция STA3, конфигурируемая, чтобы принимать упомянутый CF-END кадр от точки доступа (AP), может сравнивать значение поля длительности упомянутого CF-END кадра со своим значением NAV. Если два значения являются идентичными друг другу в соответствии с упомянутым результатом сравнения (или если значение поля длительности содержится в диапазоне 'значение NAV +/- дельта'), то станция STA3 может выполнять возврат NAV в исходное состояние. Соответственно, станция STA3 может пытаться выполнить доступ к каналу.
Фиг. 21 является концептуальной графической схемой, иллюстрирующей схему усечения TXOP в соответствии с другим вариантом осуществления настоящего изобретения.
Фиг. 21 примерно изображает то, что одно окно RAW содержится во множестве слотов (Slot0, Slot1, …). Предполагается, что несколько слотов, содержащихся в одном окне RAW, имеют ту же длительность времени.
Станции STA1, STA2, STA3 и STA4 конфигурируются для предоставления доступа к каналу в окне RAW, получившая разрешение станция STA1 и получившая разрешение станция STA2 назначаются для слота Slot0, и получившая разрешение станция STA3 и получившая разрешение станция STA4 назначаются для слота Slot1. По этой причине, станции STA1 и STA2 могут пытаться выполнить доступ к каналу на слоте Slot0, и станция STA3 и станция STA4 должны пытаться выполнить доступ к каналу на слоте Slot1. Для этой цели, конкретное время, соответствующее длительности слота, может назначаться для значения времени задержки RAW доступа для станций STA3 и STA4. Соответственно, станция STA3 и станция STA4 могут пытаться выполнить доступ к каналу после прекращения времени задержки RAW доступа. В дополнение, предполагается, что станция STA3 и станция STA4 находятся в спящем состоянии в течение времени задержки RAW доступа, для того чтобы обеспечить энергосбережение. В дополнение, предполагается, что имеется станция (STA) (не получившая разрешение станция), для которой доступ к каналу не предоставляется в окне RAW.
На Фиг. 21, предполагается, что станции STA1 и STA2 пытаются выполнить доступ к каналу на слоте Slot0, операция отсрочки выполняется в соответствии с упомянутым EDCA механизмом, и станция STA1 конфигурируется, чтобы первой получить возможность TXOP.
После этого получившая разрешение станция STA1 (то есть обладатель TXOP), получившая возможность TXOP в окне RAW передавать кадр (кадры) данных и принимать ACK кадр от точки доступа (AP), предполагая, что кадр, предназначенный для передачи, больше не присутствует, упомянутая получившая разрешение станция STA1 может передавать упомянутый CF-END кадр. Здесь поле длительности упомянутого CF-END кадра, передаваемого от упомянутой получившей разрешение станции STA1 может устанавливаться на значение оставшегося времени временного интервала TXOP, определяемого посредством станции STA1 с точки зрения обладателя TXOP (например, временной интервал TXOP может устанавливаться через RTS передачу и CTS прием перед передачей кадра данных). Получившая разрешение станция STA2, которая приняла упомянутый CF-END кадр, передаваемый от станции STA1, может сравнивать значение поля длительности упомянутого CF-END кадра со своим значением NAV. Если два значения являются идентичными друг другу в соответствии с упомянутым результатом сравнения (или если значение поля длительности содержится в диапазоне 'значение NAV +/- дельта'), то станция STA2 может выполнять возврат NAV в исходное состояние.
Станция STA2 пытается выполнить доступ к каналу после завершения возврата NAV в исходное состояние (например, станция STA2 выполняет RTS передачу кадра и CTS прием кадра после завершения отсрочки), передает упомянутый кадр данных (DATA) к точке доступа (AP), и принимает ACK кадр от точки доступа (AP).
Тем временем, хотя не получившая разрешение станция (STA) принимает упомянутый CF-END кадр от станции STA1 на слоте Slot0, не получившая разрешение станция (STA) может не выполнить возврат NAV в исходное состояние. Если не получившая разрешение станция (STA) принимает CF-END кадр от получившей разрешение станции STA1, то не получившая разрешение станция (STA) может сравнивать значение поля длительности упомянутого CF-END кадра со своим значением NAV. Если два значения отличаются друг от друга в соответствии с упомянутым результатом сравнения (или если значение поля длительности не содержится в диапазоне 'значение NAV +/- дельта'), то не получившая разрешение станция (STA) может не выполнить возврат NAV в исходное состояние и может отбрасывать CF-END кадр. Упомянутое значение NAV, устанавливаемое посредством не получившей разрешение станции (STA), не обновляется посредством кадра, передаваемого от другой станции (STA) или точки доступа (AP) в окне RAW, и отличается от значения длительности упомянутого CF-END кадра, так что не получившая разрешение станция (STA) может не выполнить возврат NAV в исходное состояние и может отбрасывать упомянутый CF-END кадр. Альтернативно, CF-END кадр, принимаемый посредством не получившей разрешение станции (STA), не является идентичным упомянутому CF-END кадру (например, упомянутому CF-END кадру, включающему в себя поле длительности нуля), указывающему возврат NAV в исходное состояние всех станций STA.
На Фиг. 21, станция STA3 и станция STA4 могут пытаться выполнить доступ к каналу на слоте Slot1 после прекращения времени задержки RAW доступа, и станция STA3 выполняет опреацию отсрочки в соответствии с EDCA механизмом, так что станция STA3 первая получает возможность TXOP.
Операции слота Slot1 для станции STA3 и станции STA4 окна RAW подобны операциям слота Slot0 для станции STA1 и станции STA2. Например, станция STA3, первая получившая возможность TXOP, может передавать упомянутый CF-END кадр после завершения передачи данных. Станция STA2 подтверждает упомянутое значение поля длительности упомянутого CF-END кадра, передаваемого от станции STA1. Если подтвержденное значение является идентичным значению NAV станции STA2, то станция STA2 может выполнять возврат NAV в исходное состояние и может пытаться выполнить доступ к каналу.
Станции STA1 и STA2 находятся в спящем состоянии в течение времени слота Slot1 для того, чтобы обеспечить энергосбережение.
Тем временем, хотя не получившая разрешение станция (STA) принимает упомянутый CF-END кадр от станции STA3 в течение времени Slot1, вектор NAV может возвращаться в исходное состояние, и упомянутый CF-END кадр может отбрасываться. Значение NAV, устанавливаемое посредством не получившей разрешение станции (STA), не обновляется посредством кадра, передаваемого посредством другой станции (STA) или точки доступа (AP) в окне RAW, и отличается от значения длительности упомянутого CF-END кадра, так что не получившая разрешение станция (STA) может не выполнить возврат NAV в исходное состояние и может отбрасывать упомянутый CF-END кадр. Альтернативно, упомянутый CF-END кадр, принимаемый посредством не получившей разрешение станции (STA), не является идентичным упомянутому CF-END кадру (например, упомянутому CF-END кадру, включающему в себя поле длительности нуля), указывающему возврат NAV в исходное состояние всех станций (STA).
Фиг. 22 является блок-схемой, иллюстрирующей способ управления вектором NAV в соответствии с одним примером настоящего изобретения.
Ссылаясь на Фиг. 22, станция (STA) может принимать CF-END кадр от другой станции (STA) или точки доступа (AP) на этапе S2210. Упомянутый CF-END кадр может включать в себя поле длительности. С точки зрения станции (STA) или точки доступа (AP), конфигурируемой передавать упомянутый CF-END кадр, нулевое значение или ненулевое значение могут быть назначены полю длительности упомянутого CF-END кадра.
После приема CF-END кадра, полученного, когда поле длительности устанавливается на ноль, станция (STA) может основываться на приеме кадра CF-END первого типа. Другими словами, NAV может возвращаться в исходное состояние на этапе S2220 (то есть станция (STA) не сравнивает свое значение NAV со значением поля длительности).
После приема упомянутого CF-END кадра, полученного, когда поле длительности устанавливается на ненулевое значение, станция (STA) может основываться на приеме CF-END кадра второго типа. То есть в соответствии с упомянутым результатом сравнения, полученным, когда значение поля длительности упомянутого CF-END кадра сравнивается с упомянутым значением NAV, как изображено на этапе S2230, определяется, выполнить ли возврат NAV в исходное состояние.
Предполагая, что станция (STA) выполняет возврат NAV в исходное состояние на этапе S2240, значение поля длительности является идентичным значению NAV станции (STA) (или значение поля длительности является идентичным любому значению из предварительно определенного диапазона (например, от 'значения NAV - дельта' до 'значения NAV + дельта') на основе значения NAV станции (STA) с учетом TSF ошибок). В этом случае, станция (STA) возвращает в исходное состояние упомянутый вектор NAV и может пытаться выполнить доступ к каналу.
Если CF-END кадр, принимаемый посредством станции (STA), отбрасывается на этапе S2250, и если значение поля длительности отличается от значения NAV станции (STA) или значение поля длительности отличается от любого значения из предварительно определенного диапазона (например, от 'значения NAV - дельта' до 'значения NAV + дельта') на основе значения NAV станции (STA) с учетом TSF ошибок). В этом случае, станция (STA) может поддерживать традиционное значение NAV без изменения.
Способ управления NAV и способ ассоциируемого доступа к каналу, изображенный на Фиг. 22, может осуществляться так, что описанные выше различные варианты осуществления настоящего изобретения могут независимо применяться или два или более вариантов осуществления из этого могут одновременно применяться.
Фиг. 23 является блок-схемой, иллюстрирующей радиочастотное (RF) устройство в соответствии с одним вариантом осуществления настоящего изобретения.
Ссылаясь на Фиг. 23, станция STA1 10 может включать в себя процессор 11 , память 12, и приемопередатчик 13. Станция STA2 20 может включать в себя процессор 21, память 22 и приемопередатчик 23. Упомянутые приемопередатчики 13 и 23 могут передавать/принимать радиочастотные (RF) сигналы и могут осуществлять физический уровень в соответствии с IEEE 802 системой. Упомянутые процессоры 11 и 21 соединены с приемопередатчиками 13 и 21, соответственно, и могут осуществлять физический уровень и/или уровень MAC в соответствии с упомянутой IEEE 802 системой. Упомянутые процессоры 11 и 21 могут конфигурироваться, чтобы работать в соответствии с описанными выше различными вариантами осуществления настоящего изобретения. Модули для осуществления работы станций STA1 и STA2 в соответствии с описанными выше различными вариантами осуществления настоящего изобретения хранятся в устройствах 12 и 22 памяти и могут осуществляться посредством упомянутых процессоров 11 и 21. Устройства 12 и 22 памяти могут включаться в упомянутые процессоры 11 и 21 или могут устанавливаться вне упомянутых процессоров 11 и 21, чтобы соединяться посредством известных средств с упомянутыми процессорами 11 и 21.
Станция STA1 10, изображенная на Фиг. 23, может выполнять NAV управление для того чтобы, выполнять доступ к каналу. Упомянутый процессор 11 может конфигурироваться, чтобы принимать CF-END кадр, включающий в себя поле длительности, через упомянутый приемопередатчик 13. В дополнение, если принимаемый CF-END кадр устанавливается на CF-END кадр первого типа (например, CF-END кадр полученный, когда поле длительности имело нулевое значение), то упомянутый процессор 11 может конфигурироваться для возвращения в исходное состояние вектора NAV. Если принимаемый CF-END кадр устанавливается на кадр CF-END второго типа (например, CF-END кадр полученный, когда поле длительности имеет ненулевое значение), то упомянутый процессор 11 может определить, выполнить ли возврат NAV в исходное состояние в соответствии с упомянутым результатом сравнения между значением поля длительности упомянутого CF-END кадра и упомянутым значением NAV станции STA1 10.
Станция STA2 20, изображенная на Фиг. 23, может конфигурировать CF-END кадр и передавать упомянутый конфигурируемый CF-END кадр. Если станция STA2 20, способная получать доступ к каналу, может освободить свою собственную очередь передачи с использованием механизма EDCA, и если оставшийся временной интервал является достаточным для передачи кадра, упомянутый процессор 21 контролирует CF-END кадр, предназначенный для передачи через упомянутый приемопередатчик 23. В дополнение, упомянутый процессор 21 может назначать нулевое (0) или ненулевое значение для поля длительности упомянутого CF-END кадра, предназначенного для передачи. Станция STA2 20 может работать как не-AP станция, или может работать как точка доступа.
Общая конфигурация станции STA1 10 и станции STA2 20, изображенных на Фиг. 23, может осуществляться так, что описанные выше различные варианты осуществления настоящего изобретения могут независимо применяться или два или более вариантов осуществления из этого могут одновременно применяться и повторяющееся описание пропускается для ясности.
Описанные выше варианты осуществления могут осуществляться посредством различных средств, например, посредством аппаратного обеспечения, встроенного программного обеспечения, программного обеспечения или их сочетанием.
При аппаратной конфигурации, упомянутый способ в соответствии с упомянутыми вариантами осуществления настоящего изобретения может осуществляться посредством одной или более специализированных интегральных схем (ASIC), цифровых сигнальных процессоров (DSP), цифровых устройств обработки сигналов (DSPD), программируемых логических устройств (PLD), программируемых вентильных матриц (FPGA), процессоров, контроллеров, микроконтроллеров или микропроцессоров.
При встроенной программной или программной конфигурации, упомянутый способ в соответствии с упомянутыми вариантами осуществления настоящего изобретения может осуществляться в форме модулей, процедур, функций и т.д., осуществляя описанные выше функции или операции. Программный код может храниться в блоке памяти и выполняться посредством процессора. Упомянутый блок памяти может размещаться внутри или вне процессора и может передавать и принимать данные к и от упомянутого процессора через различные известные средства.
Подробное описание предпочтительных вариантов осуществления настоящего изобретения было дано, чтобы позволить специалистам в данной области техники осуществить и выполнить на практике настоящее изобретение. Хотя настоящее изобретение было описано со ссылкой на упомянутые предпочтительные варианты осуществления, специалисты в данной области техники должны понимать, что различные модификации и изменения могут быть сделаны в настоящем изобретении без отклонения от сущности или объема настоящего изобретения, описываемого в прилагаемых пунктах формулы изобретения. Соответственно, настоящее изобретение не следует ограничивать конкретными вариантами осуществления, описанными здесь, но следует согласовывать с наиболее широким объемом, совместимым с принципами и новыми признаками, раскрываемыми в данном документе.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
Хотя упомянутые выше различные варианты осуществления настоящего изобретения были описаны на основе системы IEEE 802.11, упомянутые варианты осуществления могут применяться тем же способом к различным системам мобильной связи.

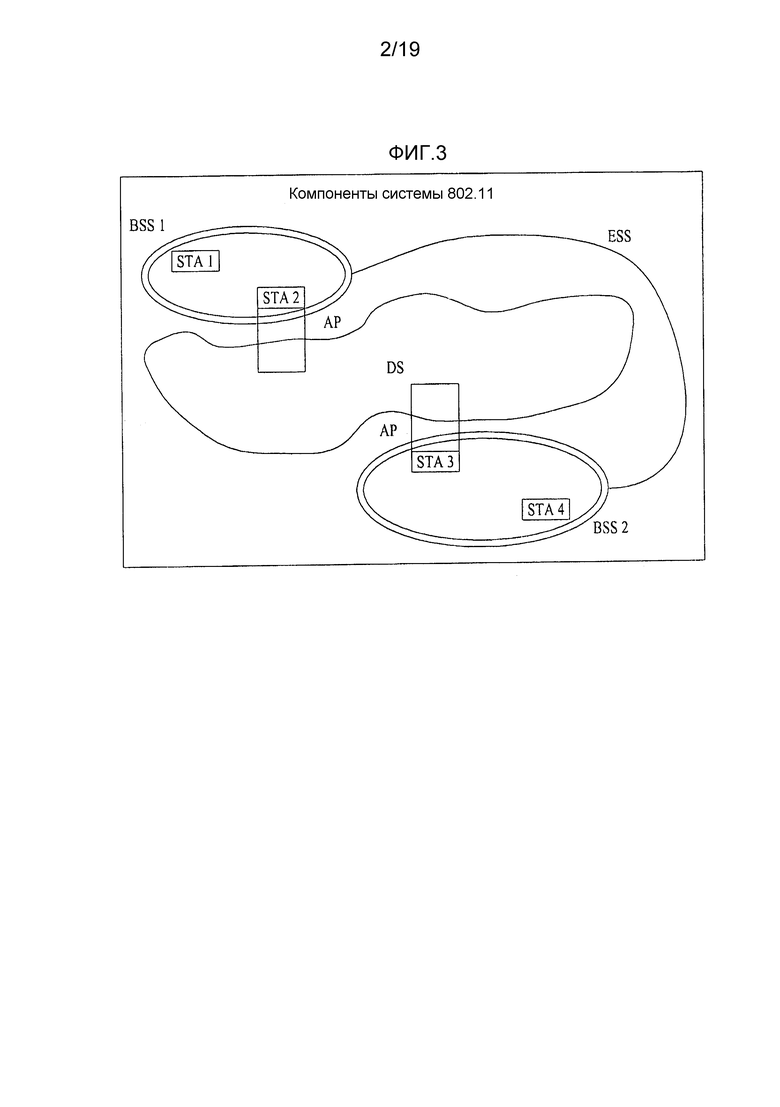


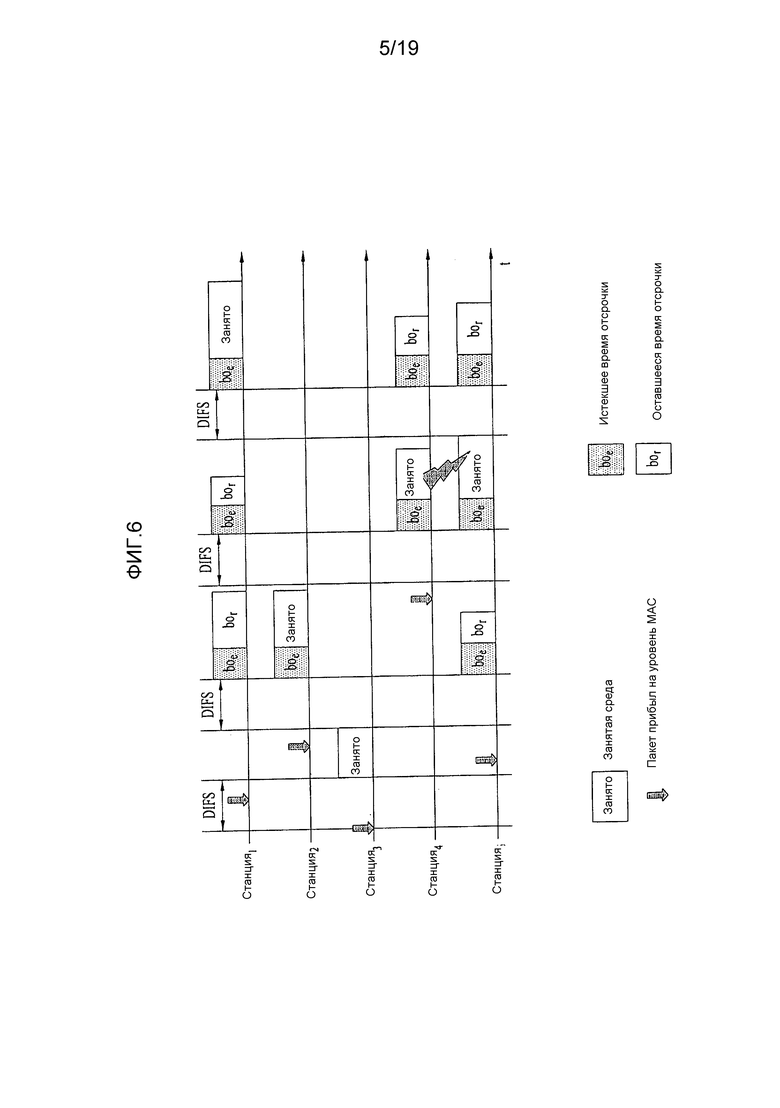
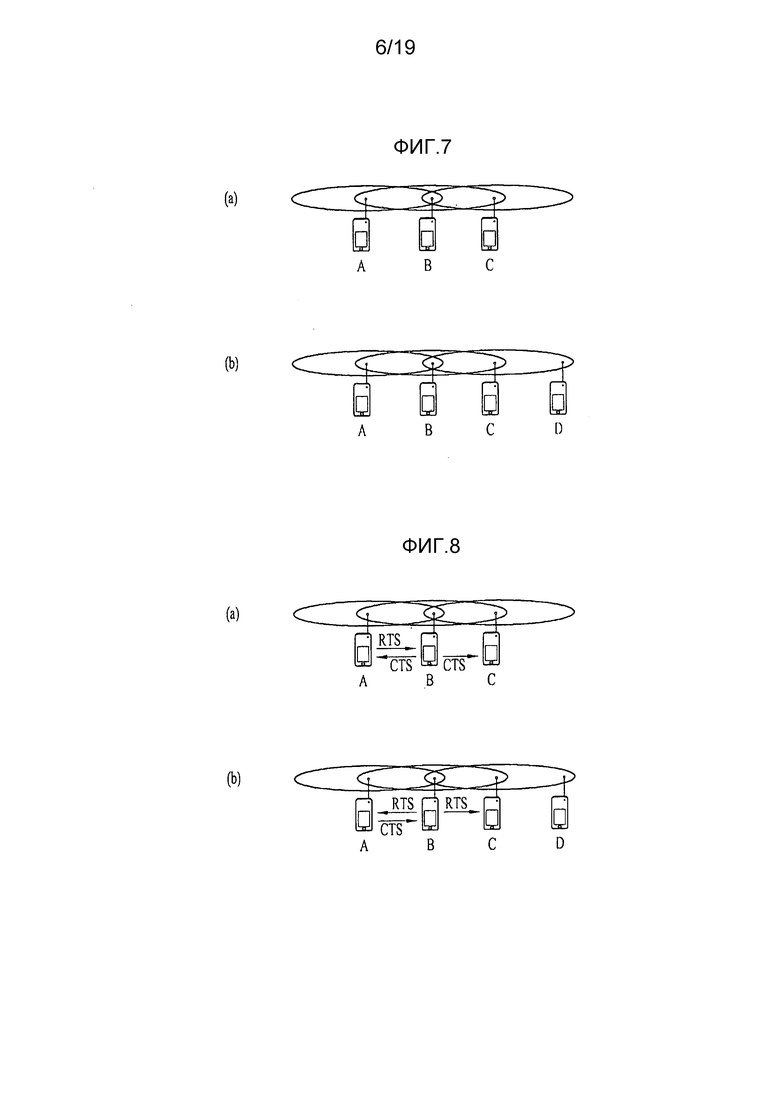

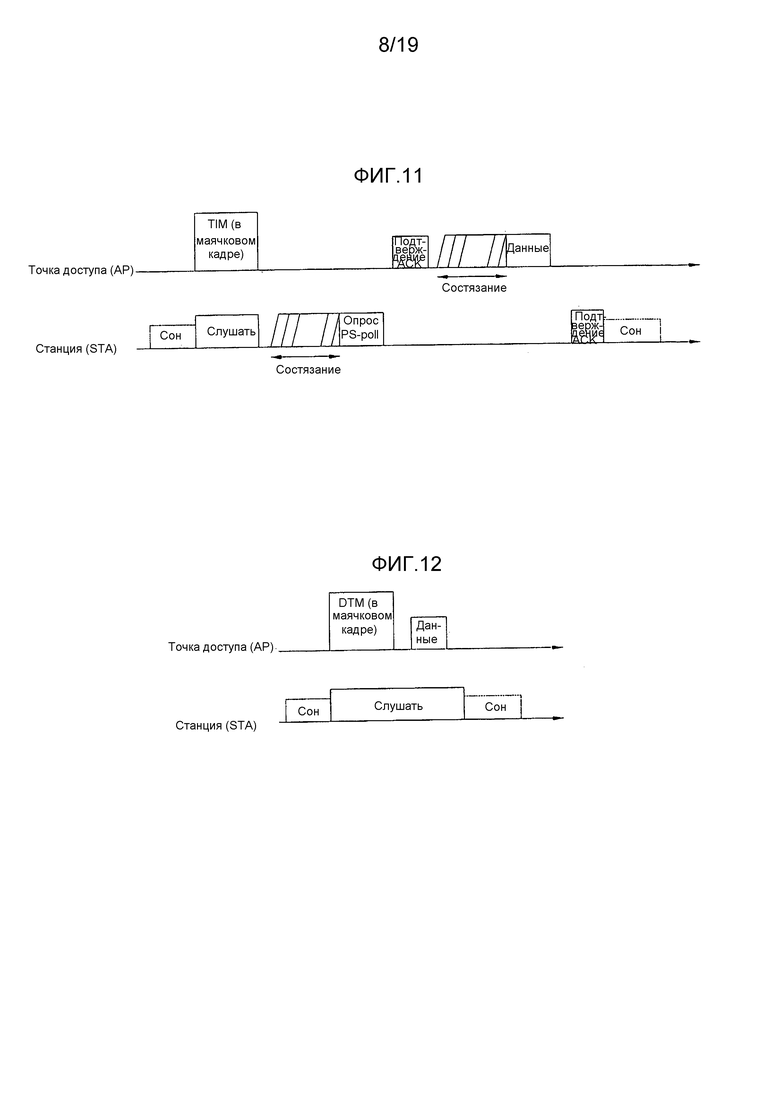
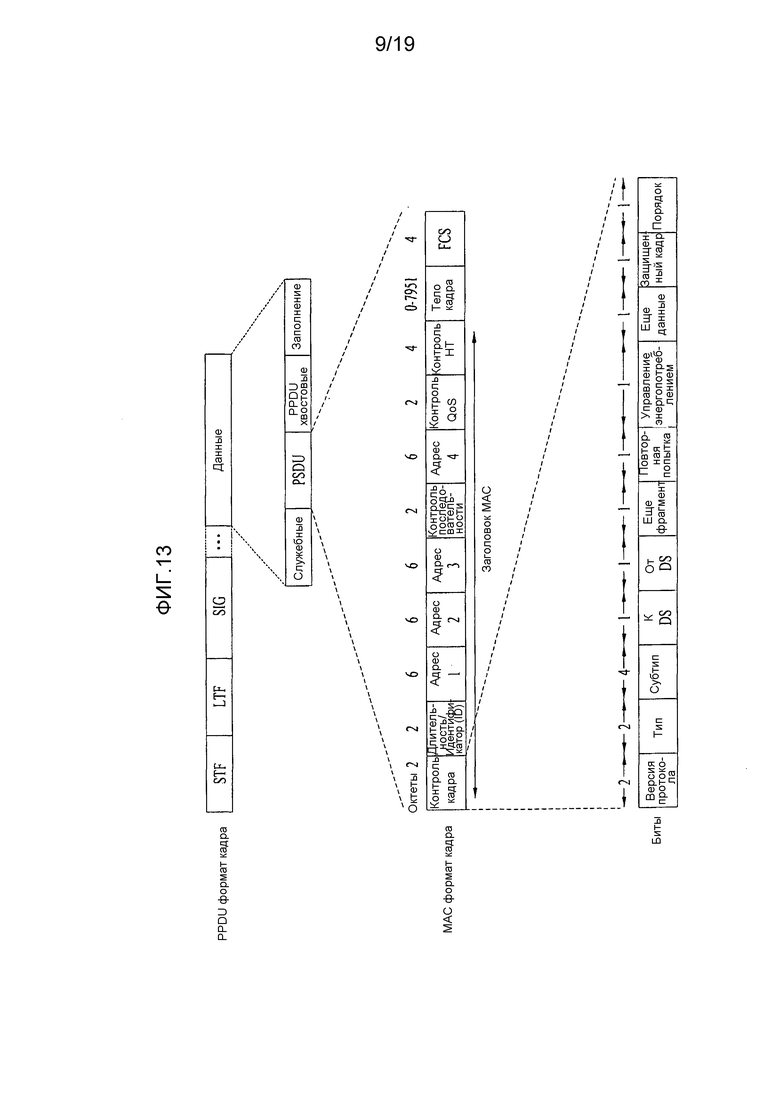
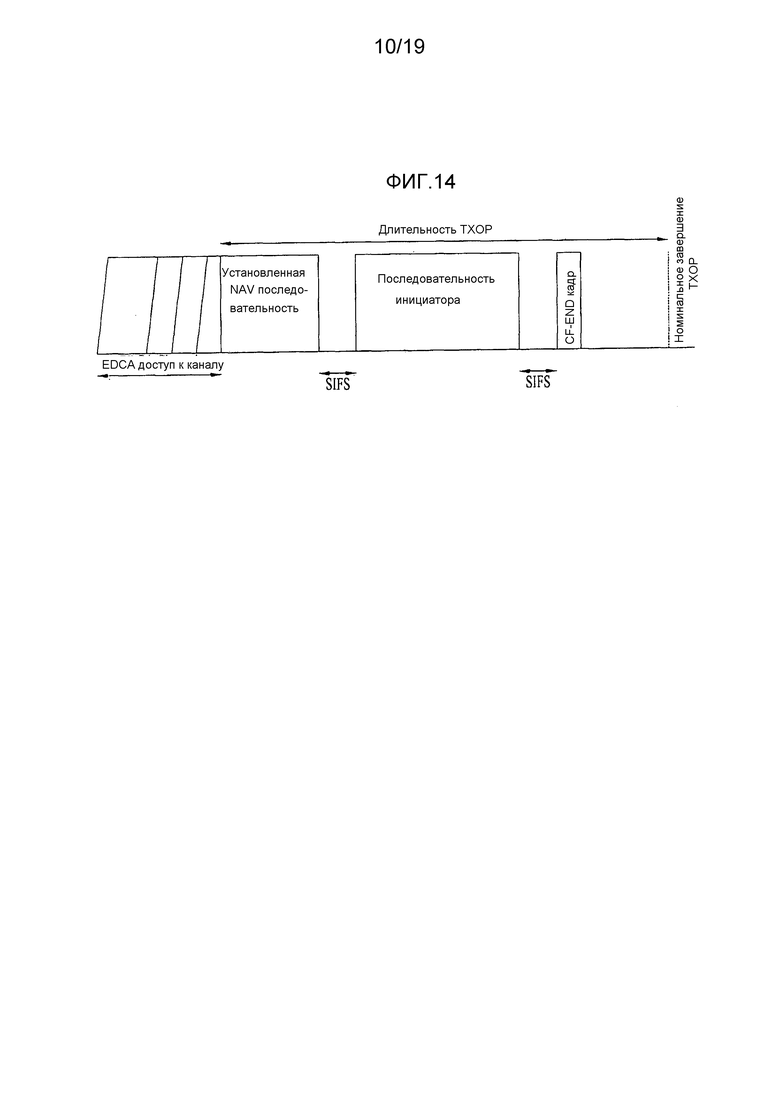
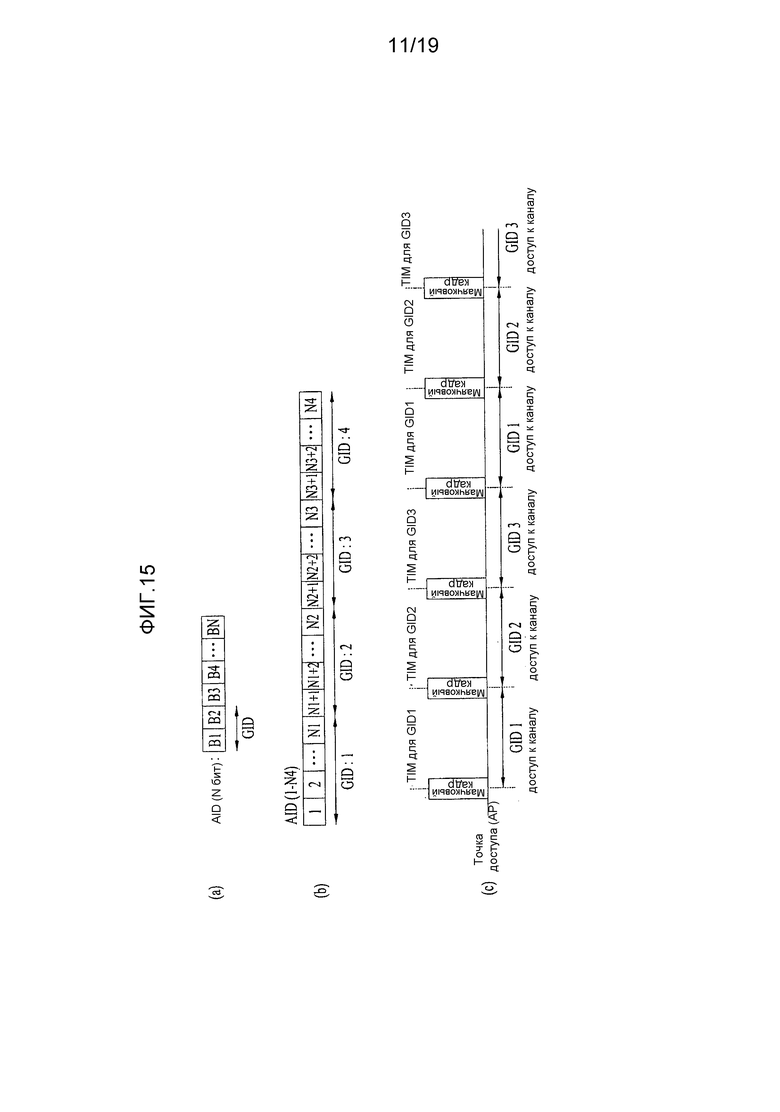
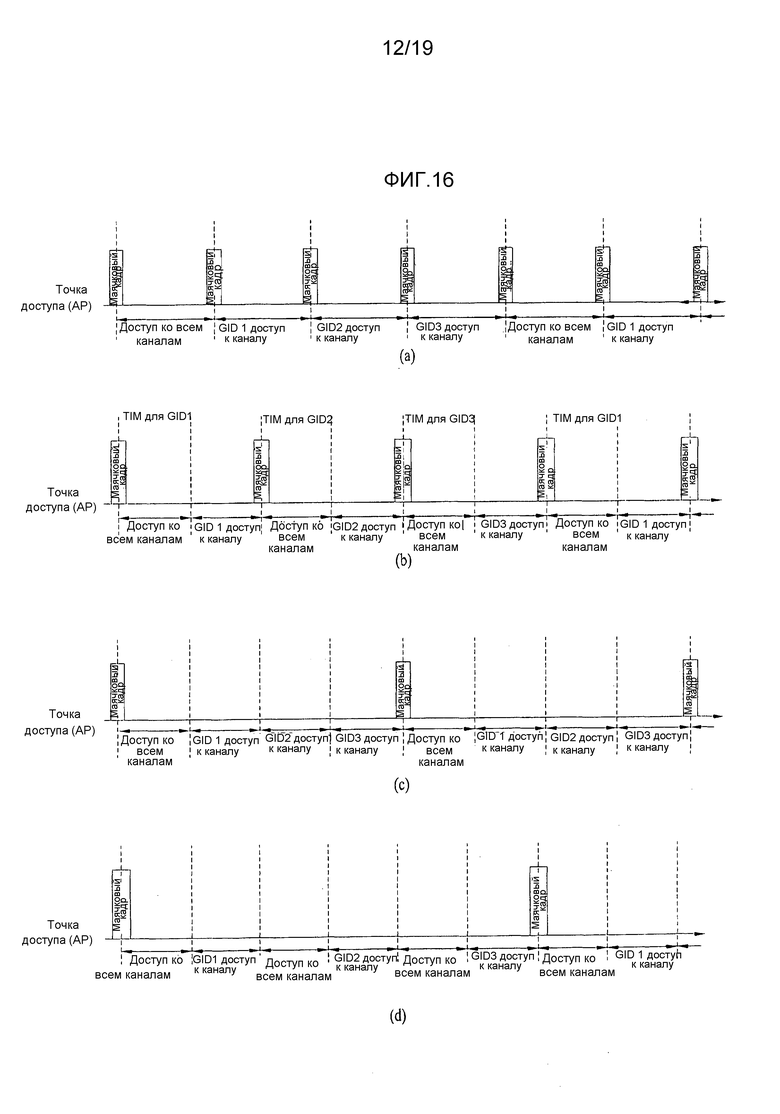
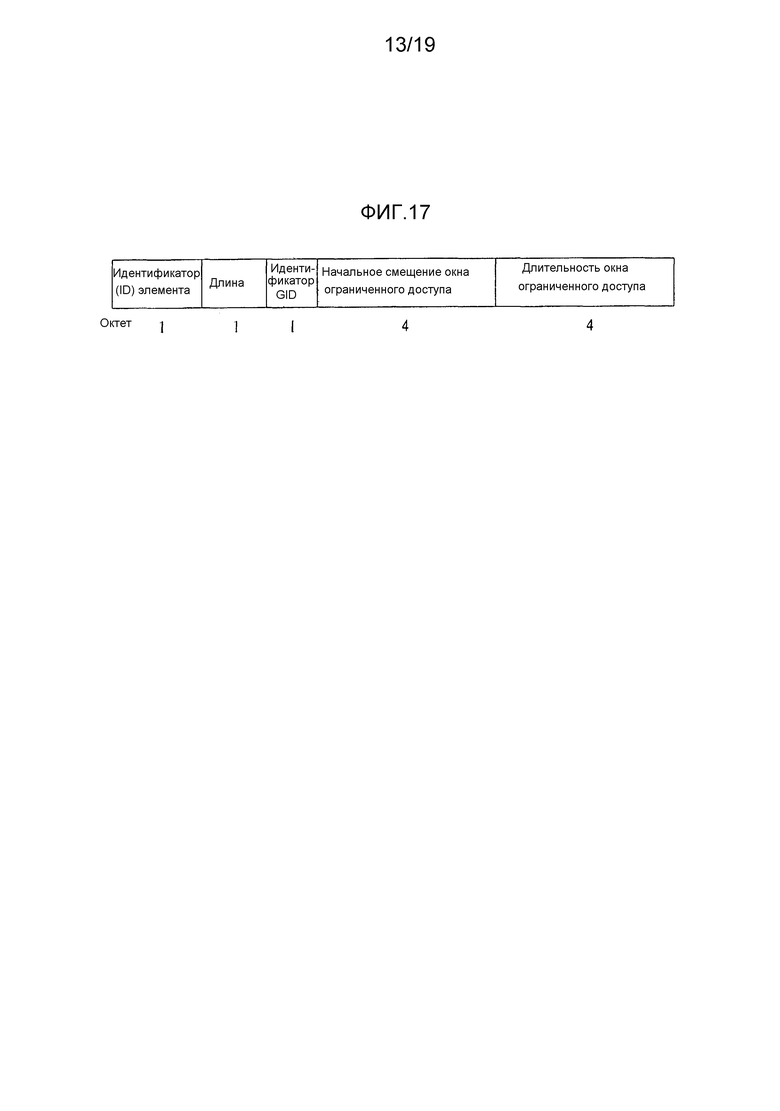

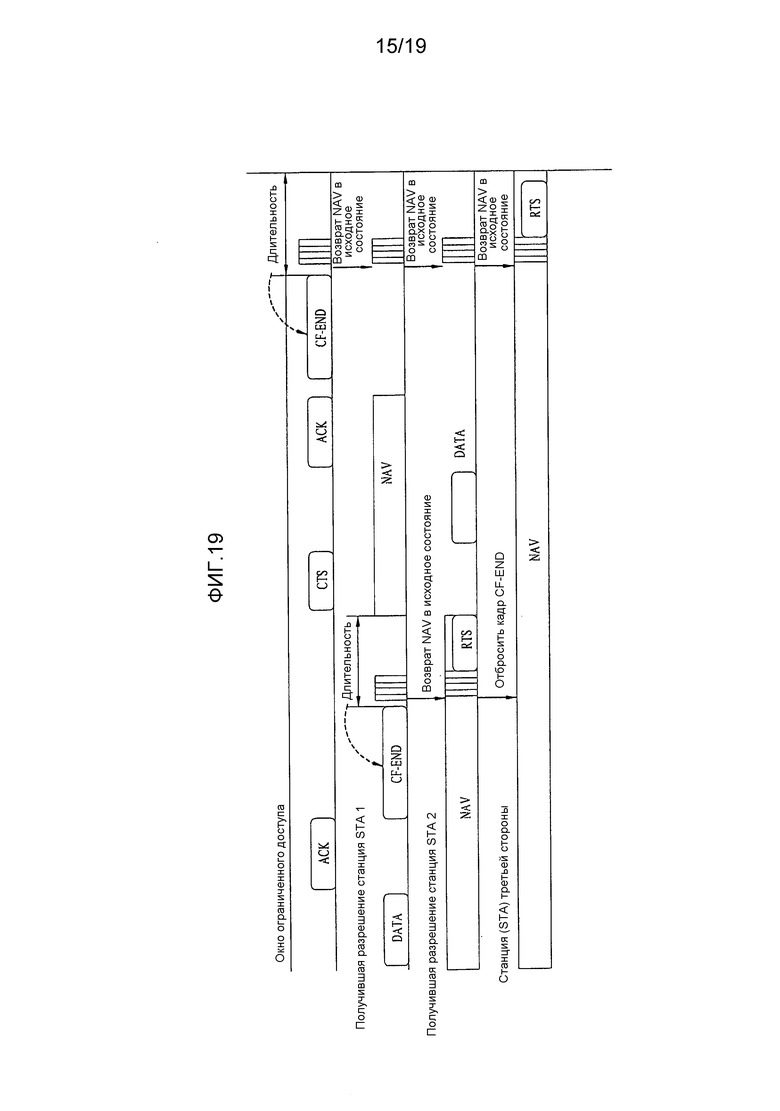
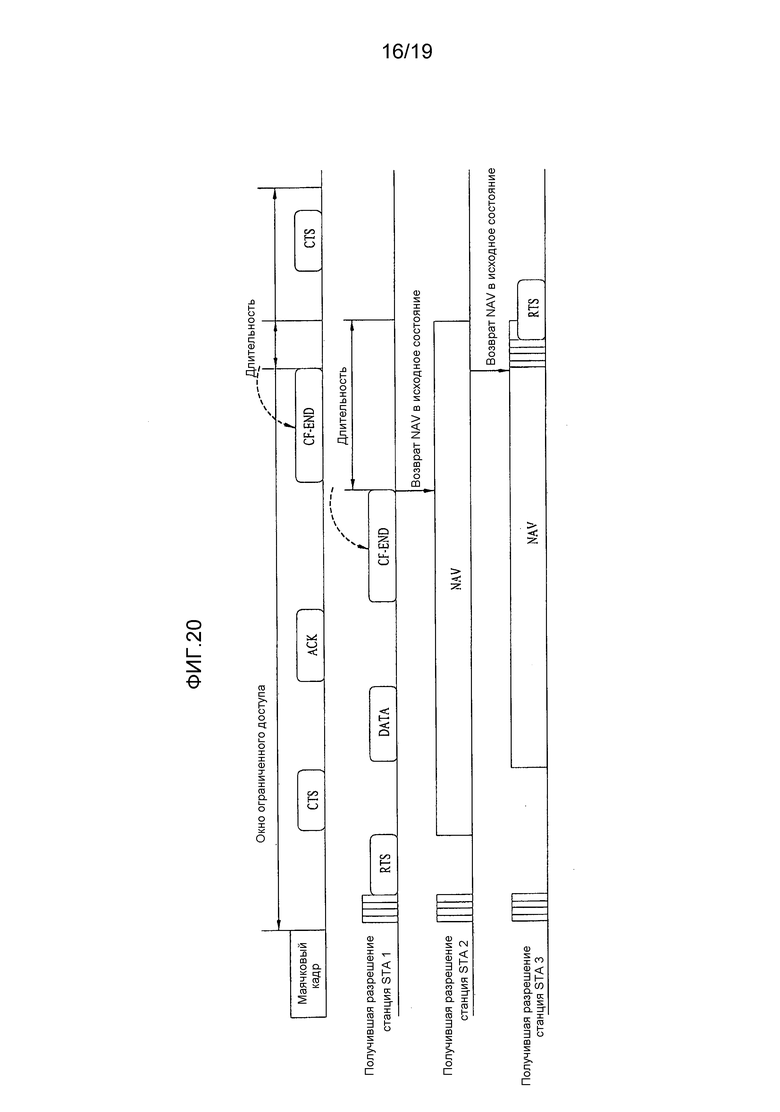
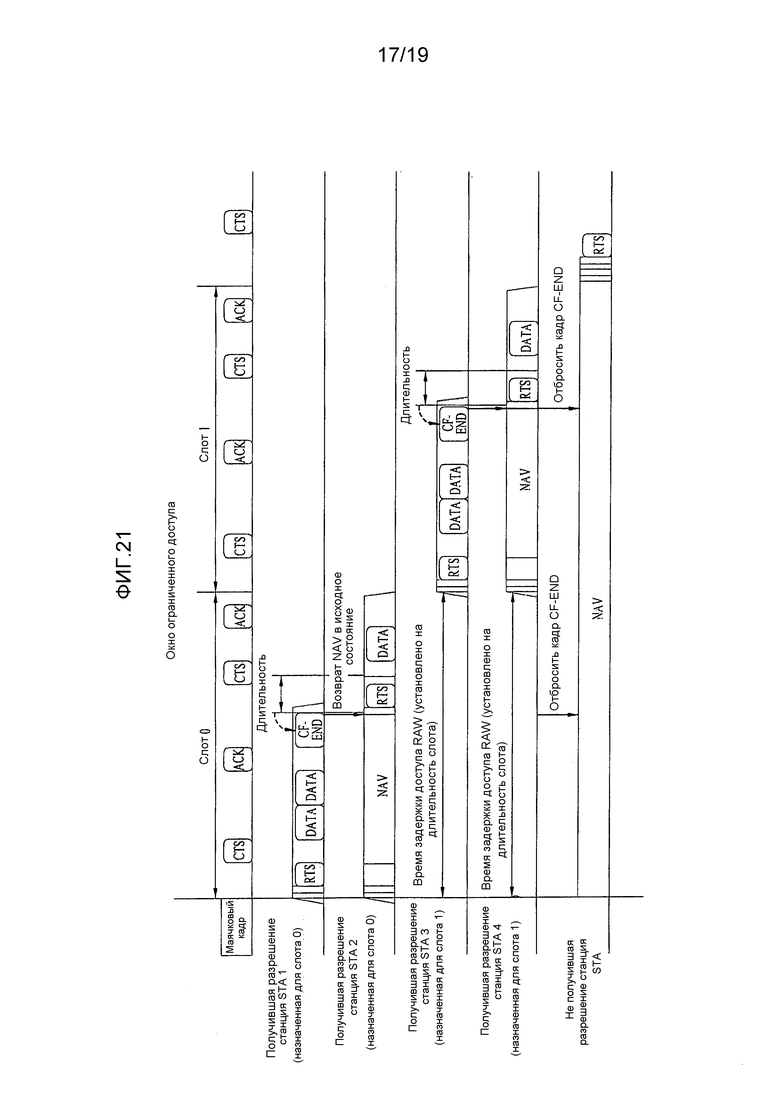

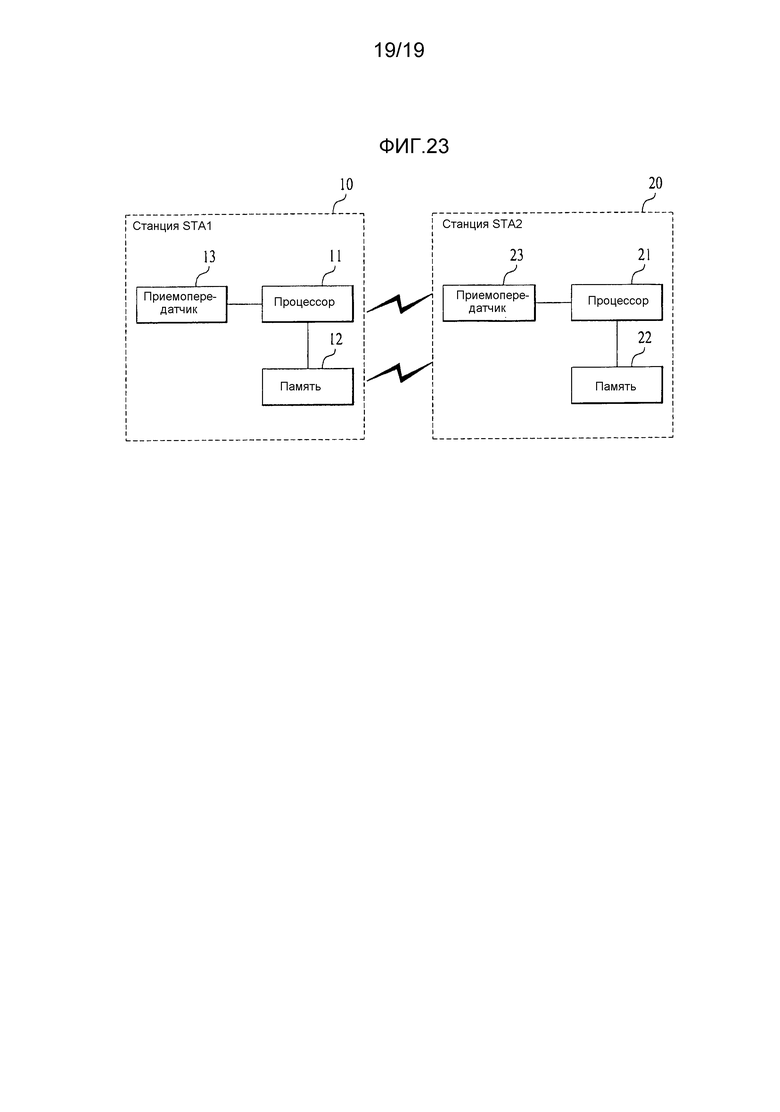
Изобретение относится к способу и устройству для выполнения доступа к каналу в WLAN системе. Технический результат – эффективное управление вектором распределения сети (NAV), чтобы увеличить эффективность доступа к каналу. Для этого способ управления NAV посредством станции (STA) в системе беспроводной локальной сети (WLAN), причем способ содержит этапы, на которых: принимают кадр окончания бессостязательного периода (CF-END), включающий в себя поле длительности; если значение поля длительности CF-END кадра равно нулю, то осуществляют возврат NAV в исходное состояние; и если значение поля длительности CF-END кадра является ненулевым, то определяют, возвращать ли NAV в исходное состояние, в соответствии с результатом сравнения между значением поля длительности и значением NAV упомянутой STA. 2 н. и 7 з.п. ф-лы, 30 ил.
1. Способ управления вектором распределения сети (NAV) посредством станции (STA) в системе беспроводной локальной сети (WLAN), причем способ содержит этапы, на которых:
принимают кадр окончания бессостязательного периода (CF-END), включающий в себя поле длительности;
если значение поля длительности CF-END кадра равно нулю, то осуществляют возврат NAV в исходное состояние; и
если значение поля длительности CF-END кадра является ненулевым, то определяют, возвращать ли NAV в исходное состояние, в соответствии с результатом сравнения между значением поля длительности и значением NAV упомянутой STA.
2. Способ по п. 1, в котором:
если значение ненулевого поля длительности отличается от значения NAV упомянутой STA, то упомянутая STA отбрасывает этот CF-END кадр.
3. Способ по п. 1, в котором:
если значение ненулевого поля длительности является идентичным значению NAV упомянутой STA, то упомянутая STA возвращает NAV в исходное состояние.
4. Способ по п. 1, в котором:
если значение ненулевого поля длительности является идентичным значению NAV упомянутой STA, то упомянутая STA возвращает NAV в исходное состояние и осуществляет попытку выполнения доступа к каналу.
5. Способ по п. 1, в котором:
если значение ненулевого поля длительности отличается от любого значения из предварительно определенного диапазона на основе значения NAV упомянутой STA, то упомянутая STA отбрасывает этот CF-END кадр.
6. Способ по п. 1, в котором:
если значение ненулевого поля длительности является идентичным любому значению из предварительно определенного диапазона на основе значения NAV упомянутой STA, то упомянутая STA возвращает NAV в исходное состояние.
7. Способ по п. 1, в котором:
если значение ненулевого поля длительности является идентичным любому значению из предварительно определенного диапазона на основе значения NAV упомянутой STA, то упомянутая STA возвращает NAV в исходное состояние и осуществляет попытку выполнения доступа к каналу.
8. Способ по п. 1, в котором значение из предварительно определенного диапазона выбирают из диапазона от значения NAV-дельта до значения NAV+дельта, при этом дельта является натуральным числом.
9. Станция (STA) для управления вектором распределения сети (NAV) в системе беспроводной локальной сети (WLAN), содержащая:
приемопередатчик и
процессор,
при этом процессор принимает кадр окончания бессостязательного периода (CF-END), включающий в себя поле длительности, через приемопередатчик;
если значение поля длительности CF-END кадра равно нулю, осуществляет возврат NAV в исходное состояние; и
если значение поля длительности CF-END кадра является ненулевым, определяет, возвращать ли NAV в исходное состояние в соответствии с результатом сравнения между значением поля длительности и значением NAV упомянутой STA.
| СПОСОБЫ И СИСТЕМЫ ДЛЯ ОБЕСПЕЧЕНИЯ ЭФФЕКТИВНОЙ РАБОТЫ МНОЖЕСТВА РЕЖИМОВ В СИСТЕМЕ БЕСПРОВОДНОЙ ЛОКАЛЬНОЙ СЕТИ (WLAN) | 2007 |
|
RU2413370C2 |
| СПОСОБ И ПРОЦЕДУРА СИГНАЛИЗАЦИИ ДЛЯ ИСПОЛЬЗОВАНИЯ ВОЗМОЖНОСТИ ПЕРЕДАЧИ В ЯЧЕИСТОЙ БЕСПРОВОДНОЙ СЕТИ | 2007 |
|
RU2407187C2 |
| US 7161951 B1, 09.01.2007 | |||
| US 8223639 B1, 17.07.2012 | |||
| US 20080013496 A1, 17.01.2008. | |||

