Изобретение относится к дистанционным способам шумовой и квазишумовой диагностики электроэнергетического (ЭЭ) оборудования, находящегося под напряжением, и в первую очередь дискретного ЭЭ оборудования с малой и средней занимаемой площадью типа силовых автотрансформаторов, трансформаторов напряжений, трансформаторов токов, управляемых шунтирующих реакторов, открытых распределительных и прочих аналогичных устройств, и предназначено для создания промышленных информационно-измерительных комплексов, осуществляющих достоверную экспресс-диагностику технического состояния указанного ЭЭ оборудования.
Известен способ дистанционного контроля технического состояния ЭЭ оборудования, в котором полную дефектность контролируемого оборудования, находящегося под напряжением, определяют по электромагнитному излучению этого оборудования [1].
Известный способ базируется на измерении средней интенсивности потока электромагнитных импульсов (предположительно шумовых), излучаемых контролируемым ЭЭ оборудованием (и, в первую очередь, дискретным ЭЭ оборудованием с малой и средней занимаемой площадью) вследствие действия электрических разрядов в изоляции этого оборудования (так называемых «частичных разрядов», т.е. разрядов, происходящих в отдельных частях изоляции). Причем измерения выполняют широкополосной приемной антенной произвольной поляризации, подключенной к входу специального регистратора средней интенсивности потока электромагнитных импульсов, создаваемых контролируемым ЭЭ оборудованием во всей рабочей полосе частот измерительной аппаратуры. Рабочие частоты измерений превышают значения  и лежат в высокочастотной части области совместного действия белых шумов (шумов ионизации изоляции с равномерным спектром, первоисточника шумовых и детерминированных излучений ЭЭ оборудования на указанных частотах [2, 3]). По результатам измерений строят зависимость средней интенсивности потока излучаемых импульсов от порога обнаружения, а в качестве диагностических параметров используют: крутизны наклонов отрезков аппроксимирующих прямых на участках этой зависимости, количество интервалов, необходимых для такой аппроксимации, и значения координат точек перегибов указанной зависимости. При этом полную дефектность контролируемого ЭЭ оборудования устанавливают по динамике изменения указанных диагностических параметров при выполнении серий периодических измерений на временных интервалах, разделенных месяцами и годами эксплуатации этого оборудования.
и лежат в высокочастотной части области совместного действия белых шумов (шумов ионизации изоляции с равномерным спектром, первоисточника шумовых и детерминированных излучений ЭЭ оборудования на указанных частотах [2, 3]). По результатам измерений строят зависимость средней интенсивности потока излучаемых импульсов от порога обнаружения, а в качестве диагностических параметров используют: крутизны наклонов отрезков аппроксимирующих прямых на участках этой зависимости, количество интервалов, необходимых для такой аппроксимации, и значения координат точек перегибов указанной зависимости. При этом полную дефектность контролируемого ЭЭ оборудования устанавливают по динамике изменения указанных диагностических параметров при выполнении серий периодических измерений на временных интервалах, разделенных месяцами и годами эксплуатации этого оборудования.
Недостатки известного способа обусловлены применением в нем нестандартной, специально изготовленной измерительной аппаратуры, громоздкой процедуры обработки результатов измерений и выбором частот измерений, лежащих, в основном, за пределами частотного диапазона наиболее интенсивных излучений ЭЭ оборудования, равного  с учетом излучений на частотах действия фликкерных шумов (спектральная плотность которых растет с понижением частоты анализа), белых шумов (с равномерным спектром) и квазигармонических составляющих с частотами питающей промышленной сети
с учетом излучений на частотах действия фликкерных шумов (спектральная плотность которых растет с понижением частоты анализа), белых шумов (с равномерным спектром) и квазигармонических составляющих с частотами питающей промышленной сети  , ее верхних гармоник
, ее верхних гармоник  (где m=2, 3, 4, …) и с резонансными частотами добротных колебательных цепей ЭЭ оборудования [2, 3]). Кроме того, в известном способе [1] нельзя без дополнительных спектральных измерений (не используемых в этом способе) однозначно утверждать, средняя интенсивность потока каких импульсов измеряется: шумовых (как полагают авторы), или детерминированных [2, 3], тоже излучаемых контролируемым ЭЭ оборудованием на частотах выше
(где m=2, 3, 4, …) и с резонансными частотами добротных колебательных цепей ЭЭ оборудования [2, 3]). Кроме того, в известном способе [1] нельзя без дополнительных спектральных измерений (не используемых в этом способе) однозначно утверждать, средняя интенсивность потока каких импульсов измеряется: шумовых (как полагают авторы), или детерминированных [2, 3], тоже излучаемых контролируемым ЭЭ оборудованием на частотах выше  . Поэтому известный способ дистанционного контроля технического состояния ЭЭ оборудования [1] не обладает требуемой оперативностью, чувствительностью и надежностью диагностирования полной дефектности указанного оборудования, а потому не пригоден для осуществления достоверной экспресс-диагностики технического состояния ЭЭ оборудования, и в первую очередь дискретного ЭЭ оборудования с малой и средней занимаемой площадью.
. Поэтому известный способ дистанционного контроля технического состояния ЭЭ оборудования [1] не обладает требуемой оперативностью, чувствительностью и надежностью диагностирования полной дефектности указанного оборудования, а потому не пригоден для осуществления достоверной экспресс-диагностики технического состояния ЭЭ оборудования, и в первую очередь дискретного ЭЭ оборудования с малой и средней занимаемой площадью.
Известен также способ дистанционного контроля технического состояния ЭЭ оборудования, в котором полную дефектность контролируемого оборудования, находящегося под напряжением, определяют по энергетическим спектрам электромагнитных излучений вертикальной поляризации этого и однотипного с ним эталонного образцов оборудования, измеренным в эквивалентных условиях с помощью стандартной промышленной аппаратуры [4], принятый нами за прототип. При этом первопричиной появления указанных излучений, шумовых и детерминированных (квазигармонических), по-прежнему являются электрические разряды в изоляции ЭЭ оборудования и создаваемые ими белые шумы ионизации изоляции с равномерным спектром. В прототипе выполняют измерения излучений именно вертикальной поляризации (а не произвольной поляризации как в способе-аналоге [1]), т.к. при этом, используя направленную измерительную антенну той же вертикальной поляризации, можно различить излучения от отдельных, близко расположенных образцов дискретного ЭЭ оборудования с малой и средней занимаемой площадью и аттестовать полные дефектности образцов этого оборудования. Рекомендуемый в этом способе частотный диапазон измерений спектров составляет  и расположен в средней части области действия белых шумов и создаваемых этими шумами квазигармонических составляющих с резонансными частотами добротных колебательных цепей ЭЭ оборудования (а не в высокочастотной части области действия белых шумов на частотах выше значения
и расположен в средней части области действия белых шумов и создаваемых этими шумами квазигармонических составляющих с резонансными частотами добротных колебательных цепей ЭЭ оборудования (а не в высокочастотной части области действия белых шумов на частотах выше значения  , как в ранее упомянутом способе. При этом полную дефектность контролируемого оборудования в известном способе [4] устанавливают с учетом дефектностей по отдельным вводам напряжений в этом оборудовании, предварительно определенным путем сравнения интегральных мощностей излучений в резонансных частотных полосах антенн вертикальной поляризации, образованных вводами напряжений в однотипном контролируемом и эталонном оборудовании.
, как в ранее упомянутом способе. При этом полную дефектность контролируемого оборудования в известном способе [4] устанавливают с учетом дефектностей по отдельным вводам напряжений в этом оборудовании, предварительно определенным путем сравнения интегральных мощностей излучений в резонансных частотных полосах антенн вертикальной поляризации, образованных вводами напряжений в однотипном контролируемом и эталонном оборудовании.
Отметим, что используемый в известном способе [4] алгоритм обработки результатов измерений проще, чем в способе [1], а рекомендуемый диапазон измерений для энергетических спектров излучений вертикальной поляризации располагается внутри вышеуказанной частотной области наиболее интенсивных электромагнитных излучений ЭЭ оборудования, за счет чего в этом известном дистанционном способе обеспечиваются повышенные, в сравнении со способом [1], оперативность, чувствительность и надежность диагностирования полной дефектности контролируемого оборудования.
Кроме того, в известном способе [4] измерения энергетических спектров излучений вертикальной поляризации для контролируемого и эталонного образцов ЭЭ оборудования осуществляются с помощью стандартной промышленной аппаратуры (широкополосной приемной антенны вертикальной поляризации и управляемого компьютером анализатора спектра), а не с применением специально изготовленной аппаратуры, как в способе [1]. Благодаря этому, в способе [4] обеспечивается дополнительный рост надежности и оперативности диагностирования полной дефектности контролируемого оборудования в сравнении с известным способом [1].
Однако известный способ дистанционного контроля технического состояния ЭЭ оборудования [4], как и способ-аналог [1], базируется на измерениях электромагнитных излучений, обязанных своим происхождением только действию белых шумов ионизации изоляции контролируемого оборудования. Кроме того, в них для определения полной дефектности ЭЭ оборудования не используются интенсивные фликкерные шумы излучения этого оборудования на частотах анализа ниже 0,2-2,0 MHz, т.е. шумы с неравномерным спектром, интенсивность которых увеличивается с понижением частоты анализа и с ростом дефектности контролируемого оборудования возрастает сильнее, чем интенсивность белых шумов [5]. В этом состоит основной недостаток известного дистанционного способа-прототипа, ибо использование фликкерных шумов может способствовать увеличению чувствительности и надежности диагностирования дефектности ЭЭ оборудования.
Кроме того, в прототипе, для аттестации полной дефектности контролируемого ЭЭ оборудования надо предварительно определить дефектности по каждому из вводов напряжений в этом оборудовании (причем полное число вводов может составлять 3-5 в отдельных видах дискретного оборудования), а это связано с соответствующими затратами времени, снижающими оперативность диагностирования полной дефектности ЭЭ оборудования.
Из сказанного следует, что прототип, как и способ-аналог [1], не обладает требуемой оперативностью, чувствительностью и надежностью диагностирования полной дефектности контролируемого оборудования, а потому не пригоден для осуществления достоверной экспресс-диагностики технического состояния этого оборудования, и в первую очередь дискретного ЭЭ оборудования с малой и средней занимаемой площадью.
Задача, на решение которой направлено заявляемое изобретение, состоит в создании способа дистанционного контроля технического состояния ЭЭ оборудования, лишенного отмеченных недостатков прототипа и других известных дистанционных способов-аналогов (встроенная шумовая диагностика [5] к известным дистанционным способам-аналогам не относится) и обладающего, в сравнении с ними, увеличенными оперативностью, чувствительностью и надежностью диагностирования полной дефектности контролируемого оборудования, а потому пригодного для выполнения достоверной экспресс-диагностики технического состояния этого оборудования, и в первую очередь дискретного ЭЭ оборудования с малой и средней занимаемой площадью.
Для решения поставленной задачи способ дистанционного контроля технического состояния ЭЭ оборудования, в котором полную дефектность контролируемого оборудования, находящегося под напряжением, определяют по энергетическим спектрам электромагнитных излучений вертикальной поляризации этого и однотипного с ним эталонного образцов оборудования, измеренным в эквивалентных условиях с помощью стандартной промышленной аппаратуры, отличается тем, что сначала измеряют энергетические спектры излучений вертикальной поляризации для эталонного и контролируемого образцов оборудования на частотах совместного действия фликкерных шумов, белых шумов и квазигармонических составляющих с частотами питающей промышленной сети, ее верхних гармоник и с резонансными частотами добротных колебательных цепей этого оборудования, затем выделяют в измеренных спектрах компоненты фликкерных и белых шумов и определяют частоты раздела  и
и  областей доминирующего действия указанных шумовых компонентов в спектрах для эталонного и контролируемого образцов оборудования, а в заключение фиксируют в этих спектрах интенсивности фликкерных шумов на максимальной частоте доминирующего действия фликкерного компонента шума в спектре контролируемого образца оборудования, т.е. на частоте
областей доминирующего действия указанных шумовых компонентов в спектрах для эталонного и контролируемого образцов оборудования, а в заключение фиксируют в этих спектрах интенсивности фликкерных шумов на максимальной частоте доминирующего действия фликкерного компонента шума в спектре контролируемого образца оборудования, т.е. на частоте  , и из сравнения фиксированных интенсивностей в спектрах для эталонного и контролируемого образцов оборудования определяют полную дефектность контролируемого образца оборудования.
, и из сравнения фиксированных интенсивностей в спектрах для эталонного и контролируемого образцов оборудования определяют полную дефектность контролируемого образца оборудования.
В заявляемом способе дистанционного контроля технического состояния ЭЭ оборудования общим с прототипом [4] существенным признаком является то, что «…полную дефектность контролируемого оборудования, находящегося под напряжением, определяют по энергетическим спектрам электромагнитных излучений вертикальной поляризации этого и однотипного с ним эталонного образцов оборудования, измеренным в эквивалентных условиях с помощью стандартной промышленной аппаратуры…».
Следовательно, в предлагаемом дистанционном способе, как и в дистанционном способе-прототипе, полную дефектность диагностируемого ЭЭ оборудования, находящегося под напряжением, определяют по энергетическим спектрам электромагнитных излучений вертикальной поляризации от контролируемого и однотипного с ним эталонного образцов оборудования, измеренным в эквивалентных условиях (т.е. в одинаковых условиях эксплуатации образцов) с помощью стандартной измерительной аппаратуры, например, с применением широкополосной приемной антенны вертикальной поляризации и управляемого компьютером промышленного анализатора спектра. При этом, в предлагаемом дистанционном способе, как и в способе-прототипе, благодаря измерению излучений именно вертикальной поляризации удается определять дефектности отдельных образцов дискретного оборудования с малой и средней занимаемой площадью, близко расположенных на местности, занимаемой ЭЭ объектом (питающей электростанцией, распределительной подстанцией и аналогичными прочими).
Сравнительный анализ отличительных признаков заявляемого решения с признаками прототипа свидетельствует о новизне и неочевидности заявляемого решения.
Признак «…измеряют энергетические спектры излучений вертикальной поляризации для эталонного и контролируемого образцов оборудования на частотах совместного действия фликкерных шумов, белых шумов и квазигармонических составляющих с частотами питающей промышленной сети, ее верхних гармоник и с резонансными частотами добротных колебательных цепей этого оборудования…» определяет рекомендуемый частотный диапазон измеряемых спектров излучений, т.е. в предлагаемом способе измеряют энергетические спектры излучений вертикальной поляризации для эталонного и контролируемого образцов ЭЭ оборудования на частотах  (запасной вариант
(запасной вариант  ), а не в диапазоне
), а не в диапазоне  , как в дистанционном способе-прототипе, и не на частотах выше значения
, как в дистанционном способе-прототипе, и не на частотах выше значения  , где в способе-аналоге [1] измеряют интенсивности излучений произвольной поляризации.
, где в способе-аналоге [1] измеряют интенсивности излучений произвольной поляризации.
Отличительный признак «…выделяют в измеренных спектрах компоненты фликкерных и белых шумов и определяют частоты раздела 
 областей доминирующего действия указанных шумовых компонентов в спектрах для эталонного и контролируемого образцов оборудования…» обеспечивает возможность простыми математическими методами, например методом линейной аппроксимации (с последующей экстраполяцией результата аппроксимации на весь частотный диапазон измерений) набора экспериментальных точек численностью 10-30 (при недостаточной численности указанных точек спектральные измерения следует распространить на рекомендуемый запасной частотный диапазон), соответствующих локальным минимумам излучений в областях спектров, где действуют фликкерные и белые шумы, и в интервалах интенсивностей, равных удвоенной для белых шумов и утроенной для фликкерных шумов погрешности измерений (увеличенный интервал интенсивностей для фликкерных шумов учитывает волнистый характер хода спектра фликкерного компонента шума, обнаруживаемый при более точной нелинейной аппроксимации его, выполненной в [6]), выделить в измеренных спектрах для эталонного и контролируемого образцов оборудования (представленных в логарифмических масштабах по обеим осям графиков) компоненты белых шумов с равномерными спектрами (SV1)W, (SV2)W и компоненты фликкерных шумов с наклонными линейными спектрами вида
областей доминирующего действия указанных шумовых компонентов в спектрах для эталонного и контролируемого образцов оборудования…» обеспечивает возможность простыми математическими методами, например методом линейной аппроксимации (с последующей экстраполяцией результата аппроксимации на весь частотный диапазон измерений) набора экспериментальных точек численностью 10-30 (при недостаточной численности указанных точек спектральные измерения следует распространить на рекомендуемый запасной частотный диапазон), соответствующих локальным минимумам излучений в областях спектров, где действуют фликкерные и белые шумы, и в интервалах интенсивностей, равных удвоенной для белых шумов и утроенной для фликкерных шумов погрешности измерений (увеличенный интервал интенсивностей для фликкерных шумов учитывает волнистый характер хода спектра фликкерного компонента шума, обнаруживаемый при более точной нелинейной аппроксимации его, выполненной в [6]), выделить в измеренных спектрах для эталонного и контролируемого образцов оборудования (представленных в логарифмических масштабах по обеим осям графиков) компоненты белых шумов с равномерными спектрами (SV1)W, (SV2)W и компоненты фликкерных шумов с наклонными линейными спектрами вида  ,
,  , где BF1, BF2 - размерные параметры линейных аппроксимаций спектров фликкерных шумов в dB(W)/Hz, увеличивающие свою интенсивность с ростом дефектности ЭЭ оборудования; v1, v2 - безразмерные параметры линейных аппроксимаций спектров фликкерных шумов, характеризующие средние наклоны этих спектров (причем с ростом дефектности контролируемого образца оборудования параметр v2 убывает от значения 1,6-1,8 в оборудовании со слабой и эталонной дефектностями до значения 1,0-1,2 в оборудовании с опасной и сильной дефектностями), и определить частоты раздела
, где BF1, BF2 - размерные параметры линейных аппроксимаций спектров фликкерных шумов в dB(W)/Hz, увеличивающие свою интенсивность с ростом дефектности ЭЭ оборудования; v1, v2 - безразмерные параметры линейных аппроксимаций спектров фликкерных шумов, характеризующие средние наклоны этих спектров (причем с ростом дефектности контролируемого образца оборудования параметр v2 убывает от значения 1,6-1,8 в оборудовании со слабой и эталонной дефектностями до значения 1,0-1,2 в оборудовании с опасной и сильной дефектностями), и определить частоты раздела  и
и  областей доминирующего действия компонентов фликкерных и белых шумов в энергетических спектрах излучений вертикальной поляризации для эталонного и контролируемого образцов оборудования, как результаты пересечений экстраполированных линейных аппроксимаций вышеуказанных компонентов шумов в измеренных спектрах, чего нет в прототипе и в других известных дистанционных способах-аналогах.
областей доминирующего действия компонентов фликкерных и белых шумов в энергетических спектрах излучений вертикальной поляризации для эталонного и контролируемого образцов оборудования, как результаты пересечений экстраполированных линейных аппроксимаций вышеуказанных компонентов шумов в измеренных спектрах, чего нет в прототипе и в других известных дистанционных способах-аналогах.
Признак «…фиксируют в этих спектрах интенсивности фликкерных шумов на максимальной частоте доминирующего действия фликкерного компонента шума в спектре контролируемого (второго) образца оборудования, т.е. на частоте  , и из сравнения фиксированных интенсивностей в спектрах для эталонного и контролируемого образцов оборудования определяют полную дефектность контролируемого образца оборудования» предлагает фиксировать в измеренных энергетических спектрах излучений вертикальной поляризации для эталонного и контролируемого образцов оборудования интенсивности фликкерных компонентов шумов (спектральные плотности этих шумов) на частоте
, и из сравнения фиксированных интенсивностей в спектрах для эталонного и контролируемого образцов оборудования определяют полную дефектность контролируемого образца оборудования» предлагает фиксировать в измеренных энергетических спектрах излучений вертикальной поляризации для эталонного и контролируемого образцов оборудования интенсивности фликкерных компонентов шумов (спектральные плотности этих шумов) на частоте  (т.е. на максимальной частоте доминирующего действия фликкерного компонента шума в спектре для контролируемого образца оборудования, где наблюдается максимальный, в сравнении с эталонным образцом, рост интенсивности фликкерного шума у контролируемого образца оборудования) и на основании сравнения фиксированных интенсивностей фликкерных компонентов шумов на частоте анализа
(т.е. на максимальной частоте доминирующего действия фликкерного компонента шума в спектре для контролируемого образца оборудования, где наблюдается максимальный, в сравнении с эталонным образцом, рост интенсивности фликкерного шума у контролируемого образца оборудования) и на основании сравнения фиксированных интенсивностей фликкерных компонентов шумов на частоте анализа  в спектрах для эталонного и контролируемого образцов оборудования разрабатывать критерии с тем, чтобы, применяя их, определять полную дефектность контролируемого образца оборудования (чего тоже нет в прототипе и в аналогах).
в спектрах для эталонного и контролируемого образцов оборудования разрабатывать критерии с тем, чтобы, применяя их, определять полную дефектность контролируемого образца оборудования (чего тоже нет в прототипе и в аналогах).
Известно, что непосредственно перед отказом контролируемого ЭЭ оборудования интенсивность белого шума в нем возрастает на 50-60 dB [6]. Кроме того, в ходе выполненных нами экспериментов было установлено, что с ростом полной дефектности контролируемого образца ЭЭ оборудования интенсивность фликкерного компонента шума в его энергетическом спектре электромагнитного излучения вертикальной поляризации на максимальной частоте доминирующего действия этого компонента шума  возрастает в среднем на 5-15 dB сильнее, чем интенсивность белого компонента шума (экспериментальное подтверждение приводится в примере практической реализации предлагаемого изобретения). Это означает, что чувствительность диагностирования дефектности в предлагаемом способе будет в среднем на те же 5-15 dB выше, чем в способе-прототипе, причем выигрыш в чувствительности растет в пределах указанного интервала с увеличением дефектности контролируемого образца оборудования и сопровождается ростом надежности диагностирования.
возрастает в среднем на 5-15 dB сильнее, чем интенсивность белого компонента шума (экспериментальное подтверждение приводится в примере практической реализации предлагаемого изобретения). Это означает, что чувствительность диагностирования дефектности в предлагаемом способе будет в среднем на те же 5-15 dB выше, чем в способе-прототипе, причем выигрыш в чувствительности растет в пределах указанного интервала с увеличением дефектности контролируемого образца оборудования и сопровождается ростом надежности диагностирования.
С учетом сказанного можно предложить следующие простые и универсальные критерии, слабо зависящие от типа ЭЭ оборудования, для определения в заявляемом способе с увеличенными чувствительностью и надежностью полной дефектности контролируемого образца оборудования по интенсивности фликкерного компонента шума на максимальной частоте доминирующего действия этого компонента  в энергетическом спектре электромагнитного излучения вертикальной поляризации этого образца.
в энергетическом спектре электромагнитного излучения вертикальной поляризации этого образца.
Слабая полная дефектность контролируемого образца ЭЭ оборудования соответствует превышению в его энергетическом спектре электромагнитного излучения вертикальной поляризации интенсивности фликкерного компонента шума на максимальной частоте доминирующего действия этого шума  над таковой на той же частоте
над таковой на той же частоте  в спектре для эталонного образца оборудования на величину до 20 dB (1).
в спектре для эталонного образца оборудования на величину до 20 dB (1).
Умеренная полная дефектность контролируемого образца ЭЭ оборудования соответствует превышению в его энергетическом спектре электромагнитного излучения вертикальной поляризации интенсивности фликкерного компонента шума на максимальной частоте доминирующего действия этого шума  над таковой на той же частоте
над таковой на той же частоте  в спектре для эталонного образца оборудования на величину от 20 dB до 40 dB (2).
в спектре для эталонного образца оборудования на величину от 20 dB до 40 dB (2).
Сильная полная дефектность контролируемого образца ЭЭ оборудования соответствует превышению в его энергетическом спектре электромагнитного излучения вертикальной поляризации интенсивности фликкерного компонента шума на максимальной частоте доминирующего действия этого шума  над таковой на той же частоте
над таковой на той же частоте  в спектре для эталонного образца оборудования на величину от 40 dB до 60 dB (3).
в спектре для эталонного образца оборудования на величину от 40 dB до 60 dB (3).
Опасная полная дефектность контролируемого образца ЭЭ оборудования соответствует превышению в его энергетическом спектре электромагнитного излучения вертикальной поляризации интенсивности фликкерного компонента шума на максимальной частоте доминирующего действия этого шума  над таковой на той же частоте
над таковой на той же частоте  в спектре для эталонного образца оборудования на величину 60 dB и более (4).
в спектре для эталонного образца оборудования на величину 60 dB и более (4).
В качестве эталона в заявляемом способе можно использовать новое ЭЭ оборудование, или образец оборудования с минимальным значением параметра аппроксимации фликкерного компонента шума BF1 и с максимальными значениями параметров аппроксимации v1 и  в энергетическом спектре излучения вертикальной поляризации этого образца среди всех обследованных образцов ЭЭ оборудования данного типа. Благодаря сравнению с эталоном, предложенные выше критерии (1-4) и полученные с применением этих критериев оценки полных дефектностей контролируемого оборудования проявляют слабую чувствительность к сторонним помехам, существенно меньшую, чем в способе-прототипе и в других известных дистанционных способах-аналогах, поскольку в заявляемом способе при выделении шумовых компонентов в спектрах излучений для эталонного и контролируемого образцов оборудования все квазигармонические пики, в том числе и пики, обязанные своим происхождением сторонним излучениям, исключаются из рассмотрения, что ведет к дополнительному росту надежности диагностирования в заявляемом способе и чего нет в прототипе и в других известных дистанционных способах-аналогах.
в энергетическом спектре излучения вертикальной поляризации этого образца среди всех обследованных образцов ЭЭ оборудования данного типа. Благодаря сравнению с эталоном, предложенные выше критерии (1-4) и полученные с применением этих критериев оценки полных дефектностей контролируемого оборудования проявляют слабую чувствительность к сторонним помехам, существенно меньшую, чем в способе-прототипе и в других известных дистанционных способах-аналогах, поскольку в заявляемом способе при выделении шумовых компонентов в спектрах излучений для эталонного и контролируемого образцов оборудования все квазигармонические пики, в том числе и пики, обязанные своим происхождением сторонним излучениям, исключаются из рассмотрения, что ведет к дополнительному росту надежности диагностирования в заявляемом способе и чего нет в прототипе и в других известных дистанционных способах-аналогах.
При этом, оперативность формирования заключения о полной дефектности контролируемого ЭЭ оборудования в заявляемом способе также выше, чем в способе-прототипе, т.к. в предлагаемом способе используется упрощенный, в сравнении с прототипом, вариант обработки измерений, и полная дефектность контролируемого оборудования определяется непосредственно по интенсивности фликкерного компонента шума в спектре электромагнитного излучения вертикальной поляризации контролируемого оборудования на максимальной частоте доминирующего действия указанного шумового компонента  , минуя присутствующие в способе-прототипе этапы предварительного определения дефектностей по отдельным вводам напряжений в контролируемом оборудовании.
, минуя присутствующие в способе-прототипе этапы предварительного определения дефектностей по отдельным вводам напряжений в контролируемом оборудовании.
Можно напомнить также, что рекомендуемый запасной расширенный частотный диапазон измерений в заявляемом способе можно использовать как резерв для дополнительного повышения надежности диагностирования полной дефектности ЭЭ оборудования, поскольку с расширением частотного диапазона измерений увеличивается точность выделения компонентов фликкерных и белых шумов в энергетических спектрах излучений вертикальной поляризации эталонного и контролируемого оборудования.
В итоге, в заявляемом способе дистанционного контроля технического состояния ЭЭ оборудования все достоинства прототипа сохранены и умножены. При этом заявляемый дистанционный способ, в сравнении со способом-прототипом и другими известными дистанционными способами-аналогами, обеспечивает увеличенные оперативность, чувствительность и надежность диагностирования полной дефектности контролируемого оборудования, а потому позволяет осуществлять достоверную экспресс-диагностику полной дефектности этого оборудования, и в первую очередь дискретного ЭЭ оборудования с малой и средней занимаемой площадью.
Из сказанного следует, что предложенная совокупность общих и отличительных существенных признаков заявляемого способа дистанционного контроля технического состояния ЭЭ оборудования обеспечивает решение поставленной задачи и достижение желаемого технического результата.
Именно эта совокупность существенных признаков заявляемого способа дистанционного контроля технического состояния ЭЭ оборудования позволила увеличить оперативность, чувствительность и надежность диагностирования полной дефектности контролируемого оборудования, а потому сделала предлагаемый способ пригодным для выполнения достоверной экспресс-диагностики полной дефектности этого оборудования и, в первую очередь, дискретного ЭЭ оборудования с малой и средней занимаемой площадью.
На основании изложенного можно заключить, что совокупность существенных признаков заявляемого изобретения имеет причинно-следственную связь с достигнутым техническим результатом, т.е. благодаря данной совокупности существенных признаков изобретение решило поставленную задачу.
При этом, заявляемое изобретение является новым и обладает изобретательским уровнем, так как оно не следует явным образом из известных технических решений.
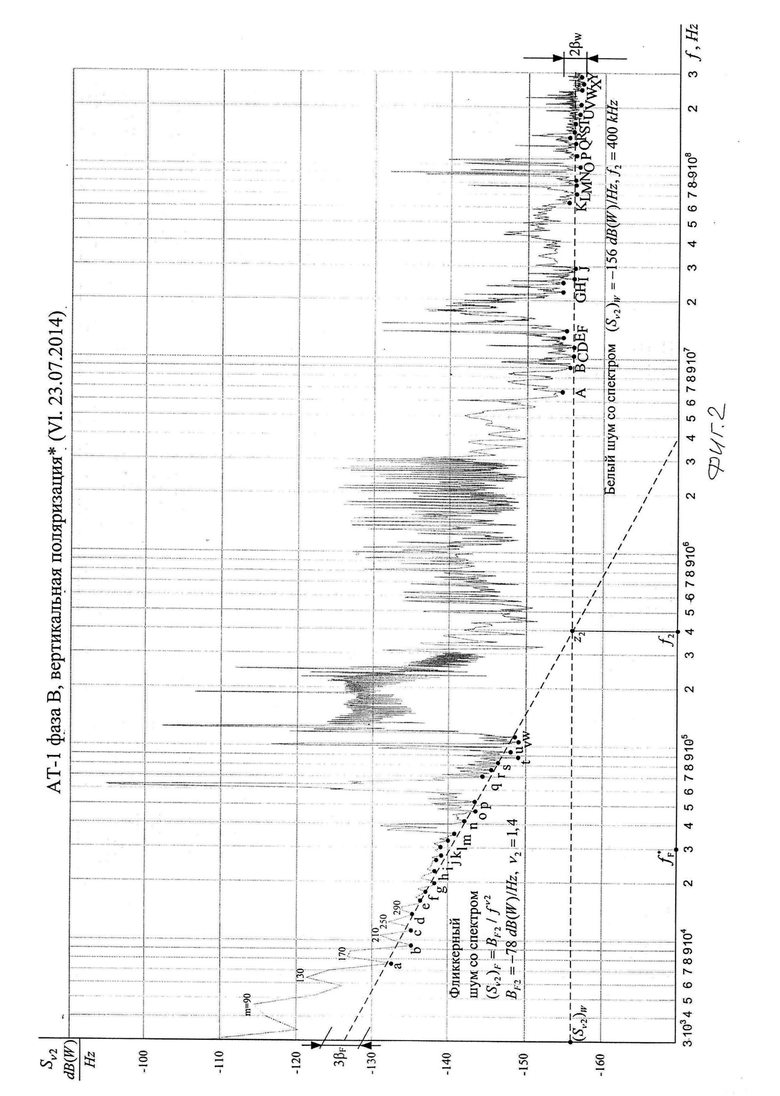
Реализацию заявляемого способа дистанционного контроля технического состояния ЭЭ оборудования продемонстрируем на примере диагностирования полной дефектности отечественного однофазного силового ВВ автотрансформатора АОДЦТН 16700/500/220, подключенного своими вводами к линиям электропередачи 500 kV, 220 kV и 11 kV.
В данном трансформаторе ВВ ввод 1 подключен к линии передачи напряжения 500 kV от питающей электростанции, ВВ ввод 2 - к линии передачи напряжения 230 kV для основного потребителя, НВ ввод 3 - заземлен, НВ вводы 4, 5 подключены к линии передачи напряжения 11 kV для местного потребителя.
Сущность заявляемого изобретения поясняется чертежами.
На фиг. 1 представлен (в логарифмическом масштабе по обеим осям) энергетический спектр излучения вертикальной поляризации диагностируемого трансформатора АТ-1 фаза В, снятый в номинальном режиме его эксплуатации в июне 2010 года в рекомендованном в заявляемом способе основном частотном диапазоне  (отличном от таковых в прототипе и в аналоге) с помощью широкополосной измерительной антенны вертикальной поляризации и управляемого компьютером промышленного анализатора спектра "NS-30A". Указанный трансформатор, по данным способов [4, 7], показал достаточно слабую полную дефектность на момент проведения испытаний в июне 2010 года, и потому принят нами за эталонный (первый) при демонстрации заявляемого способа.
(отличном от таковых в прототипе и в аналоге) с помощью широкополосной измерительной антенны вертикальной поляризации и управляемого компьютером промышленного анализатора спектра "NS-30A". Указанный трансформатор, по данным способов [4, 7], показал достаточно слабую полную дефектность на момент проведения испытаний в июне 2010 года, и потому принят нами за эталонный (первый) при демонстрации заявляемого способа.
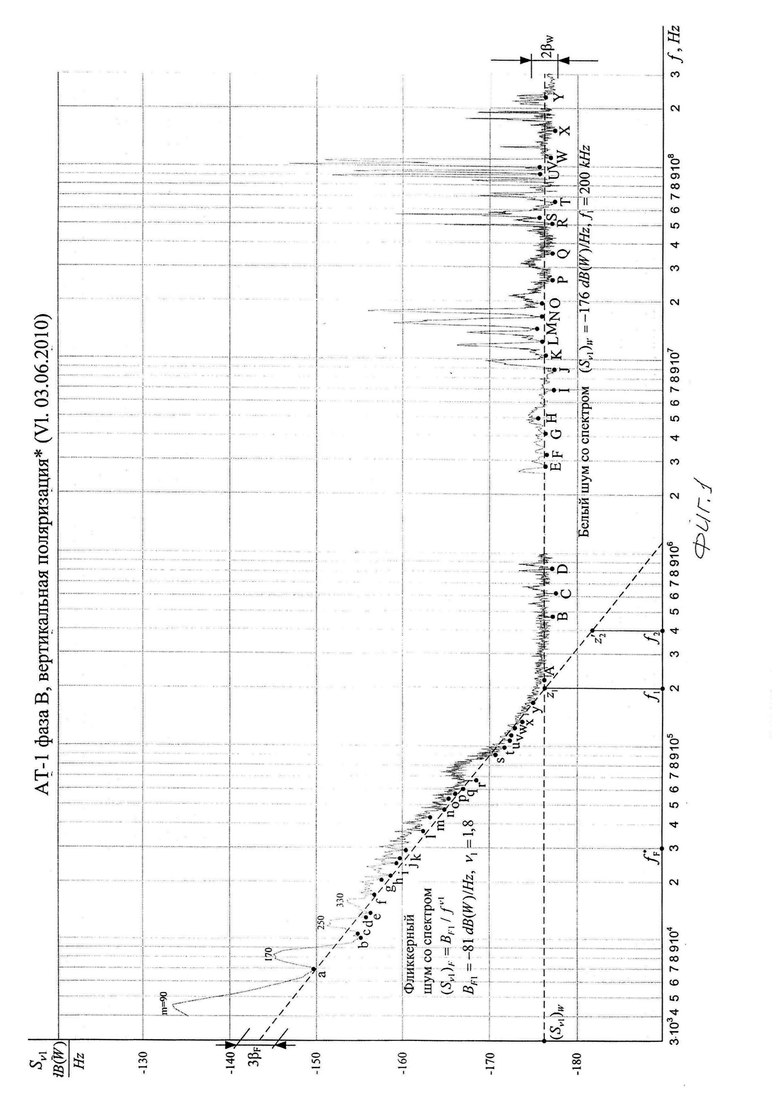
На фиг. 2 представлен (в логарифмическом масштабе по обеим осям) энергетический спектр излучения вертикальной поляризации того же диагностируемого трансформатора АТ-1 фаза В, снятый в номинальном режиме его эксплуатации и в том же частотном диапазоне f=3 kHz - 300 MHz с помощью тех же измерительных средств в июле 2014 года. Данный трансформатор после 4-х лет непрерывной эксплуатации стал теперь контролируемым (вторым), на фиг. 3 схематически показано ЭЭ оборудование.
На фиг. 1, 2 использованы следующие обозначения:

 - энергетические спектры электромагнитных излучений вертикальной поляризации для эталонного и контролируемого трансформаторов в dB(W)/Hz;
- энергетические спектры электромагнитных излучений вертикальной поляризации для эталонного и контролируемого трансформаторов в dB(W)/Hz;
 - частота анализа спектров в Hz;
- частота анализа спектров в Hz;
(SV1)W, (SV2)W и  ,
,  - компоненты белых и фликкерных шумов в спектрах для эталонного и контролируемого трансформаторов в dB(W)/Hz (показаны пунктирными линиями);
- компоненты белых и фликкерных шумов в спектрах для эталонного и контролируемого трансформаторов в dB(W)/Hz (показаны пунктирными линиями);
BF1, BF2 - размерные параметры линейных аппроксимаций фликкерных компонентов шумов в dB(W)/Hz в спектрах для эталонного и контролируемого трансформаторов;
v1, v2 - безразмерные параметры линейных аппроксимаций фликкерных компонентов шумов, характеризующие средние наклоны этих компонентов в спектрах для эталонного и контролируемого трансформаторов;
 ,
,  - частоты раздела в Hz областей доминирующего действия компонентов фликкерных и белых шумов в спектрах для эталонного и контролируемого трансформаторов.
- частоты раздела в Hz областей доминирующего действия компонентов фликкерных и белых шумов в спектрах для эталонного и контролируемого трансформаторов.
В левой части спектра фиг. 1, на частотах анализа  , видны пики квазигармонических колебаний с частотами верхних гармоник промышленной сети
, видны пики квазигармонических колебаний с частотами верхних гармоник промышленной сети  , где
, где  , m=90, 170, 250, 330. Затем, на частотах анализа
, m=90, 170, 250, 330. Затем, на частотах анализа  , следует участок чистого фликкерного шума, протяженностью чуть более декады, в средней части которого имеется небольшой квазигармонический пик.
, следует участок чистого фликкерного шума, протяженностью чуть более декады, в средней части которого имеется небольшой квазигармонический пик.
В правой части спектра фиг. 1, на частотах анализа  , есть участок чистого белого шума, протяженностью около 0.7 декады. Разрыв в спектре на частотах
, есть участок чистого белого шума, протяженностью около 0.7 декады. Разрыв в спектре на частотах  обусловлен техническими причинами. Затем, на частотах
обусловлен техническими причинами. Затем, на частотах  , вновь следует участок белого шума, протяженностью в 0,6 декады с небольшим квазигармоническим пиком в начале его, а далее, вплоть до частоты 300 MHz, наблюдаются достаточно интенсивные пики квазигармонических составляющих, изредка прерываемые короткими участками белого шума с частотами: 23-30 MHz, 33-50 MHz, 130-170 MHz, и 230-300 MHz.
, вновь следует участок белого шума, протяженностью в 0,6 декады с небольшим квазигармоническим пиком в начале его, а далее, вплоть до частоты 300 MHz, наблюдаются достаточно интенсивные пики квазигармонических составляющих, изредка прерываемые короткими участками белого шума с частотами: 23-30 MHz, 33-50 MHz, 130-170 MHz, и 230-300 MHz.
Выполняя для участка спектра с частотами  (см. фиг. 1) линейную аппроксимацию зависимостью вида
(см. фиг. 1) линейную аппроксимацию зависимостью вида  для набора экспериментальных точек a, b, c, …, y (требуемая полная численность точек 20-30, при недостаточном числе точек спектральные измерения следует продолжить в низкочастотной области вплоть до минимальной запасной рекомендуемой частоты
для набора экспериментальных точек a, b, c, …, y (требуемая полная численность точек 20-30, при недостаточном числе точек спектральные измерения следует продолжить в низкочастотной области вплоть до минимальной запасной рекомендуемой частоты  ), соответствующих локальным минимумам спектральных плотностей в энергетическом спектре излучения эталонного трансформатора в интервале интенсивностей, равном утроенной погрешности измерения на частотах действия фликкерных шумов 3βF (величина 3βF в нашем случае на частотах
), соответствующих локальным минимумам спектральных плотностей в энергетическом спектре излучения эталонного трансформатора в интервале интенсивностей, равном утроенной погрешности измерения на частотах действия фликкерных шумов 3βF (величина 3βF в нашем случае на частотах  составила 4,5 dB), выделим фликкерный компонент шума в спектре эталонного трансформатора (наклонная пунктирная линия с экстраполяцией на весь частотный диапазон измерений) и определим его параметры: BF1=-81 dB(W)/Hz, v1=1,8.
составила 4,5 dB), выделим фликкерный компонент шума в спектре эталонного трансформатора (наклонная пунктирная линия с экстраполяцией на весь частотный диапазон измерений) и определим его параметры: BF1=-81 dB(W)/Hz, v1=1,8.
Аналогично, выполняя на частотах  (см. фиг. 1) аппроксимацию линией, параллельной оси частот
(см. фиг. 1) аппроксимацию линией, параллельной оси частот  , набора экспериментальных точек А, В, С, …, Y (необходимая численность точек 10-20, при недостаточном числе точек спектральные измерения следует продолжить в высокочастотной области вплоть до максимальной запасной рекомендуемой частоты
, набора экспериментальных точек А, В, С, …, Y (необходимая численность точек 10-20, при недостаточном числе точек спектральные измерения следует продолжить в высокочастотной области вплоть до максимальной запасной рекомендуемой частоты  ), соответствующих локальным минимумам спектральных плотностей в энергетическом спектре излучения эталонного трансформатора в интервале интенсивностей, равном удвоенной погрешности измерения на частотах действия белых шумов 2βW (величина 2βW в нашем случае на частотах
), соответствующих локальным минимумам спектральных плотностей в энергетическом спектре излучения эталонного трансформатора в интервале интенсивностей, равном удвоенной погрешности измерения на частотах действия белых шумов 2βW (величина 2βW в нашем случае на частотах  составила 3 dB), выделим компонент белого шума с равномерным спектром (горизонтальная пунктирная линия с экстраполяцией на весь частотный диапазон измерений), определим его спектральную плотность (SV1)W и уточним значение частоты
составила 3 dB), выделим компонент белого шума с равномерным спектром (горизонтальная пунктирная линия с экстраполяцией на весь частотный диапазон измерений), определим его спектральную плотность (SV1)W и уточним значение частоты  , разделяющей области доминирующего действия компонентов фликкерного и белого шумов в спектре излучения эталонного трансформатора: (SV1)W=-176 dB(W)/Hz и
, разделяющей области доминирующего действия компонентов фликкерного и белого шумов в спектре излучения эталонного трансформатора: (SV1)W=-176 dB(W)/Hz и  (частота
(частота  соответствует точке z1 на пересечении пунктирных аппроксимаций для фликкерного и белого компонентов шумов). Отметим, что указанные процедуры по выделению компонентов фликкерного и белого шумов в спектре для эталонного образца ЭЭ оборудования в способе-прототипе не выполняются.
соответствует точке z1 на пересечении пунктирных аппроксимаций для фликкерного и белого компонентов шумов). Отметим, что указанные процедуры по выделению компонентов фликкерного и белого шумов в спектре для эталонного образца ЭЭ оборудования в способе-прототипе не выполняются.
В левой части спектра фиг. 2, на частотах анализа  , видны пики квазигармонических колебаний с частотами верхних гармоник питающей промышленной сети
, видны пики квазигармонических колебаний с частотами верхних гармоник питающей промышленной сети  , где
, где  , m=60, 90, 130, 170, 210, 250, 290. Далее, на частотах анализа
, m=60, 90, 130, 170, 210, 250, 290. Далее, на частотах анализа  , следуют короткие участки фликкерных шумов с частотами: 16-36 kHz, 40-46 kHz, 70-85 kHz, 105-120 kHz, чередующиеся с весьма интенсивными квазигармоническими составляющими.
, следуют короткие участки фликкерных шумов с частотами: 16-36 kHz, 40-46 kHz, 70-85 kHz, 105-120 kHz, чередующиеся с весьма интенсивными квазигармоническими составляющими.
В правой части спектра фиг. 2, на частотах анализа  , наблюдается «густой лес», состоящий из интенсивных пиков квазигармонических составляющих, изредка прерываемых короткими участками белого шума с частотами: 28-30 MHz, 63-73 MHz, 80-85 MHz, 150-200 MHz и 250-300 MHz.
, наблюдается «густой лес», состоящий из интенсивных пиков квазигармонических составляющих, изредка прерываемых короткими участками белого шума с частотами: 28-30 MHz, 63-73 MHz, 80-85 MHz, 150-200 MHz и 250-300 MHz.
Выполняя для участка спектра с частотами  (см. фиг. 2) линейную аппроксимацию зависимостью вида
(см. фиг. 2) линейную аппроксимацию зависимостью вида  для набора экспериментальных точек a, b, c, …- y (необходимая численность точек 20-30, при недостаточном числе точек спектральные измерения следует продолжить в низкочастотной области вплоть до минимальной запасной рекомендуемой частоты измерений
для набора экспериментальных точек a, b, c, …- y (необходимая численность точек 20-30, при недостаточном числе точек спектральные измерения следует продолжить в низкочастотной области вплоть до минимальной запасной рекомендуемой частоты измерений  ), соответствующих локальным минимумам спектральных плотностей в спектре излучения контролируемого трансформатора в интервале интенсивностей, равном утроенной погрешности измерения на частотах действия фликкерных шумов 3βF (величина 3βF в нашем случае на частотах
), соответствующих локальным минимумам спектральных плотностей в спектре излучения контролируемого трансформатора в интервале интенсивностей, равном утроенной погрешности измерения на частотах действия фликкерных шумов 3βF (величина 3βF в нашем случае на частотах  составляла 4,5 dB), выделим компонент фликкерного шума в спектре излучения контролируемого трансформатора (наклонная пунктирная линия с экстраполяцией на весь частотный диапазон измерений) и определим его параметры: BF2=-78 dB(W)/Hz, v2=1,4. Отметим, что за 4 года непрерывной эксплуатации контролируемого образца ЭЭ оборудования параметры фликкерного компонента шума в его спектре претерпели существенные изменения.
составляла 4,5 dB), выделим компонент фликкерного шума в спектре излучения контролируемого трансформатора (наклонная пунктирная линия с экстраполяцией на весь частотный диапазон измерений) и определим его параметры: BF2=-78 dB(W)/Hz, v2=1,4. Отметим, что за 4 года непрерывной эксплуатации контролируемого образца ЭЭ оборудования параметры фликкерного компонента шума в его спектре претерпели существенные изменения.
Аналогично, выполняя на частотах  (см. фиг. 2) аппроксимацию линией, параллельной оси частот
(см. фиг. 2) аппроксимацию линией, параллельной оси частот  , набора экспериментальных точек А, В, С, …- Y (численностью 10-20, при недостаточном числе экспериментальных точек спектральные измерения следует продолжить в высокочастотной области вплоть до максимальной рекомендуемой запасной частоты
, набора экспериментальных точек А, В, С, …- Y (численностью 10-20, при недостаточном числе экспериментальных точек спектральные измерения следует продолжить в высокочастотной области вплоть до максимальной рекомендуемой запасной частоты  ), соответствующих локальным минимумам спектральных плотностей в спектре излучения контролируемого трансформатора в интервале интенсивностей, равном удвоенной погрешности измерения на частотах действия белых шумов 2βW (величина 2βW в нашем случае на частотах
), соответствующих локальным минимумам спектральных плотностей в спектре излучения контролируемого трансформатора в интервале интенсивностей, равном удвоенной погрешности измерения на частотах действия белых шумов 2βW (величина 2βW в нашем случае на частотах  составляла 3 dB), выделим компонент белого шума с равномерным спектром (горизонтальная пунктирная линия с экстраполяцией на весь частотный диапазон измерений), определим его спектральную плотность (SV2)W и уточним значение частоты
составляла 3 dB), выделим компонент белого шума с равномерным спектром (горизонтальная пунктирная линия с экстраполяцией на весь частотный диапазон измерений), определим его спектральную плотность (SV2)W и уточним значение частоты  , разделяющей области доминирующего действия компонентов фликкерного и белого шумов в спектре излучения контролируемого трансформатора: (SV2)W=-156 dB(W)/Hz и
, разделяющей области доминирующего действия компонентов фликкерного и белого шумов в спектре излучения контролируемого трансформатора: (SV2)W=-156 dB(W)/Hz и  (частота
(частота  соответствует точке пересечения z2 экстраполированных линейных пунктирных аппроксимаций для фликкерного и белого компонентов шумов). Указанных процедур по выделению компонентов фликкерного и белого шумов в спектре для контролируемого образца ЭЭ оборудования в прототипе нет.
соответствует точке пересечения z2 экстраполированных линейных пунктирных аппроксимаций для фликкерного и белого компонентов шумов). Указанных процедур по выделению компонентов фликкерного и белого шумов в спектре для контролируемого образца ЭЭ оборудования в прототипе нет.
Как видим, интенсивность белого шума в энергетическом спектре излучения вертикальной поляризации у контролируемого трансформатора превосходит таковую у эталонного трансформатора на 20 dB, что является в заявляемом способе косвенным признаком увеличенной дефектности контролируемого трансформатора в сравнении с эталонным трансформатором.
Оценку для разности интенсивностей фликкерных компонентов шумов в спектрах излучений вертикальной поляризации для контролируемого и эталонного трансформаторов в заявляемом способе предлагается выполнить на максимальной частоте доминирующего действия фликкерного компонента шума в спектре контролируемого трансформатора, т.е. в нашем случае на частоте  .
.
Поэтому далее, фиксируем для точек z2 (фиг. 2) и  (фиг. 1), соответствующих частоте анализа
(фиг. 1), соответствующих частоте анализа  , значения спектральных плотностей фликкерных компонентов шумов в спектрах контролируемого и эталонного трансформаторов и получаем:
, значения спектральных плотностей фликкерных компонентов шумов в спектрах контролируемого и эталонного трансформаторов и получаем:  и
и  . Как видим, интенсивность фликкерного компонента шума на частоте
. Как видим, интенсивность фликкерного компонента шума на частоте  в спектре излучения контролируемого трансформатора превосходит таковую на той же частоте
в спектре излучения контролируемого трансформатора превосходит таковую на той же частоте  в спектре эталонного трансформатора на 26 dB, что на 6 dB больше разницы интенсивностей белых шумов в указанных спектрах.
в спектре эталонного трансформатора на 26 dB, что на 6 dB больше разницы интенсивностей белых шумов в указанных спектрах.
Последнее обстоятельство означает, что в рассматриваемом нами примере практической реализации заявляемого дистанционного способа чувствительность диагностирования полной дефектности контролируемого трансформатора по интенсивности фликкерного шума будет на 6 dB выше, чем в способе-прототипе. Причем, с ростом чувствительности в заявляемом способе повышается и надежность диагностирования дефектности контролируемого трансформатора.
Отметим также, что на средней (в логарифмическом масштабе) частоте для областей доминирующего действия фликкерных компонентов шумов 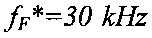 в спектрах трансформаторов в нашем примере практической реализации заявляемого дистанционного способа разность интенсивностей фликкерных шумов у контролируемого и эталонного трансформаторов составляет 21 dB, т.е. с точностью до погрешности измерений совпадает с разницей интенсивностей белых шумов у этих трансформаторов. Это означает, что максимальный выигрыш в чувствительности диагностирования полной дефектности контролируемого трансформатора в заявляемом способе реализуется при фиксировании интенсивностей фликкерных компонентов шумов именно на частоте
в спектрах трансформаторов в нашем примере практической реализации заявляемого дистанционного способа разность интенсивностей фликкерных шумов у контролируемого и эталонного трансформаторов составляет 21 dB, т.е. с точностью до погрешности измерений совпадает с разницей интенсивностей белых шумов у этих трансформаторов. Это означает, что максимальный выигрыш в чувствительности диагностирования полной дефектности контролируемого трансформатора в заявляемом способе реализуется при фиксировании интенсивностей фликкерных компонентов шумов именно на частоте  (т.е. на максимальной частоте доминирующего действия фликкерного компонента шума в спектре контролируемого трансформатора) и практически отсутствует при фиксировании интенсивностей фликкерных шумов на средней частоте
(т.е. на максимальной частоте доминирующего действия фликкерного компонента шума в спектре контролируемого трансформатора) и практически отсутствует при фиксировании интенсивностей фликкерных шумов на средней частоте  и ниже (следствие существенно разных наклонов компонентов фликкерных шумов в спектрах эталонного и контролируемого трансформаторов).
и ниже (следствие существенно разных наклонов компонентов фликкерных шумов в спектрах эталонного и контролируемого трансформаторов).
Теперь, используя полученные результаты и критерии (1-4), мы можем в нашем примере практической реализации заявляемого способа с чувствительностью, увеличенной в сравнении с прототипом на 6 dB, и с повышенной надежностью диагностирования оценить полную дефектность контролируемого трансформатора АТ-1 фаза В на июль 2014 года как умеренную (заключение подтверждено способами [4, 7]). С ростом полной дефектности контролируемого трансформатора указанный выигрыш в чувствительности диагностирования в предлагаемом способе будет расти и составит в нашем примере: 12 dB - при сильной дефектности, 18 dB - при опасной дефектности.
Следует отметить также, что в рассмотренном нами примере практической реализации заявляемого способа мы оценили с увеличенными чувствительностью и надежностью (в сравнении с прототипом и другими известными дистанционными способами-аналогами) полную дефектность контролируемого трансформатора, минуя сложный алгоритм обработки результатов измерений, используемый в способе-аналоге [1], и обязательные для способа-прототипа этапы предварительного определения дефектностей по отдельным вводам напряжений в этом трансформаторе, и продемонстрировали таким образом еще одно важное достоинство предлагаемого способа - увеличенную оперативность диагностирования полной дефектности контролируемого ЭЭ оборудования в сравнении со способом-прототипом и известным дистанционным способом-аналогом [1].
Приведенный пример практической реализации заявляемого способа дистанционного контроля технического состояния ЭЭ оборудования с учетом получаемых результатов доказывает новизну, практическую значимость и преимущества этого способа над прототипом и другими известными дистанционными способами-аналогами как в плане увеличения чувствительности, оперативности и надежности диагностирования полной дефектности контролируемого оборудования, так и в плане пригодности заявляемого способа для осуществления достоверной экспресс-диагностики полной дефектности указанного оборудования, и в первую очередь дискретного ЭЭ оборудования с малой и средней занимаемой площадью.
Источники информации
1. Глухов О.А., Коровкин Н.В., Балагула Ю.М. Методика оценки параметров частичных разрядов в высоковольтной изоляции при относительных измерениях их импульсных электромагнитных полей. Тр. IV Межд. симп. по электромагнитной совместимости, С.-Петербург, 2001.
2. Клоков В.В., Лосев В.Л., Попович А.Б., Силин Н.В., Шевердин Д.Г. Развитая излучающая модель электроэнергетического оборудования. Электро, №2, Москва, 2011.
3. Dima М., Losev V. Generating electromagnetic fluctuations by electric condenser. Proceedings of the 8-th International Symposium on Electromagnetic Compatibility and Electromagnetic Ecology. St.-Petersburg, 2009.
4. Патент RU 2311652 С1, опубликован 27.11.2007 - прототип.
5. Klokov V., Losev V., Silin N., Sheverdin D., Tsepennikov D. Flicker-Noise Diagnostics of Power Electric Equipment. Proceedings of International Symposium on Electromagnetic Theory (EMTS-2010), Berlin, August, 2010.
6. Brzhesinskiy A., Losev V., Ri Bak Son. Diagnostics of Electronic and Biological Systems by Flikker-Noise. Proceedings of the 10-th Session of the Russian Acoustics Society, Section Noise and Vibration, v. 3, Moscow, RAES, 2000.
7. Методические указания по диагностике развивающихся дефектов трансформаторного оборудования по результатам хроматографического анализа газов, растворенных в масле. РД 153-34.0-46.302-00, РАО «ЕЭС России», Департамент научно-технической политики и развития РФ, М., 2001.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ дистанционного контроля технического состояния электроэнергетических объектов | 2019 |
|
RU2702815C1 |
| Способ контроля технического состояния электроэнергетического оборудования | 2015 |
|
RU2610823C1 |
| Способ контроля технического состояния электроэнергетических объектов | 2015 |
|
RU2611554C1 |
| СПОСОБ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕКТРОЭНЕРГЕТИЧЕСКОГО ОБОРУДОВАНИЯ | 2010 |
|
RU2476895C2 |
| СПОСОБ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕКТРОЭНЕРГЕТИЧЕСКОГО ОБОРУДОВАНИЯ | 2010 |
|
RU2429497C1 |
| СПОСОБ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕКТРОЭНЕРГЕТИЧЕСКОГО ОБОРУДОВАНИЯ | 2015 |
|
RU2589303C1 |
| СПОСОБ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕКТРОЭНЕРГЕТИЧЕСКОГО ОБОРУДОВАНИЯ | 2009 |
|
RU2426997C1 |
| СПОСОБ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕКТРОЭНЕРГЕТИЧЕСКОГО ОБОРУДОВАНИЯ | 2006 |
|
RU2311652C1 |
| Способ контроля технического состояния электроэнергетического оборудования | 2020 |
|
RU2749338C1 |
| СПОСОБ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕМЕНТОВ ВЫСОКОВОЛЬТНОГО ОБОРУДОВАНИЯ | 2008 |
|
RU2368914C1 |
Изобретение относится к дистанционным способам шумовой и квазишумовой диагностики электроэнергетического оборудования, находящегося под напряжением. Измеряют в эквивалентных условиях энергетические спектры электромагнитных излучений вертикальной поляризации для контролируемого и однотипного с ним эталонного образцов оборудования на частотах действия фликкерных шумов, белых шумов и квазигармонических составляющих с частотами питающей промышленной сети, ее верхних гармоник и с резонансными частотами добротных колебательных цепей этого оборудования. Затем выделяют в измеренных спектрах компоненты фликкерных и белых шумов и определяют частоты раздела  и
и  областей доминирующего действия указанных компонентов шумов в энергетических спектрах вертикальной поляризации для эталонного (первого) и контролируемого (второго) образцов оборудования, а в заключение фиксируют в этих спектрах интенсивности фликкерных шумов на максимальной частоте доминирующего действия фликкерного компонента шума в спектре контролируемого (второго) образца оборудования, т.е. на частоте
областей доминирующего действия указанных компонентов шумов в энергетических спектрах вертикальной поляризации для эталонного (первого) и контролируемого (второго) образцов оборудования, а в заключение фиксируют в этих спектрах интенсивности фликкерных шумов на максимальной частоте доминирующего действия фликкерного компонента шума в спектре контролируемого (второго) образца оборудования, т.е. на частоте  , и из сравнения фиксированных интенсивностей в спектрах для эталонного и контролируемого образцов оборудования определяют полную дефектность контролируемого образца оборудования. Технический результат заключается в повышении оперативности, чувствительности и надежности диагностирования полной дефектности оборудования, находящегося под напряжением. 3 ил.
, и из сравнения фиксированных интенсивностей в спектрах для эталонного и контролируемого образцов оборудования определяют полную дефектность контролируемого образца оборудования. Технический результат заключается в повышении оперативности, чувствительности и надежности диагностирования полной дефектности оборудования, находящегося под напряжением. 3 ил.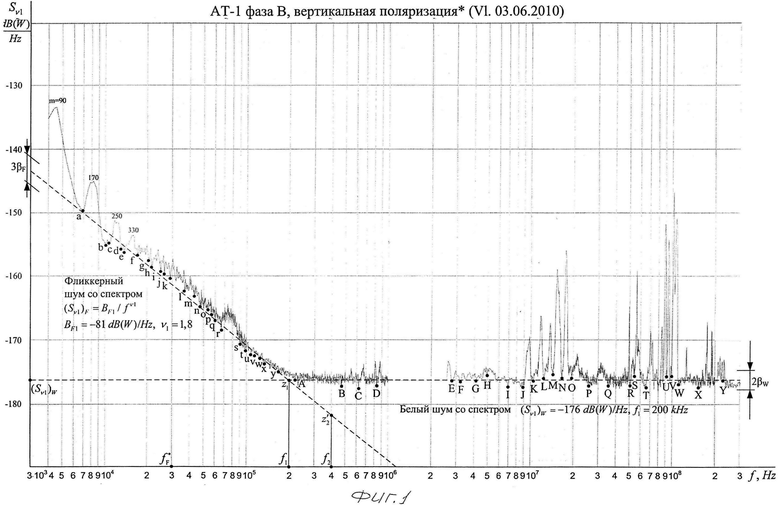
Способ дистанционного контроля технического состояния электроэнергетического оборудования, в котором полную дефектность контролируемого оборудования, находящегося под напряжением, определяют по энергетическим спектрам электромагнитных излучений вертикальной поляризации этого и однотипного с ним эталонного образцов оборудования, измеренным в эквивалентных условиях с помощью стандартной промышленной аппаратуры, отличающийся тем, что сначала измеряют энергетические спектры излучений вертикальной поляризации для эталонного и контролируемого образцов оборудования на частотах совместного действия фликкерных шумов, белых шумов и квазигармонических составляющих с частотами питающей промышленной сети, ее верхних гармоник и с резонансными частотами добротных колебательных цепей этого оборудования, затем выделяют в измеренных спектрах компоненты фликкерных и белых шумов и определяют частоты раздела  и
и  областей доминирующего действия указанных шумовых компонентов в спектрах для эталонного и контролируемого образцов оборудования, а в заключение фиксируют в этих спектрах интенсивности фликкерных шумов на максимальной частоте доминирующего действия фликкерного компонента шума в спектре контролируемого образца оборудования, т.е. на частоте
областей доминирующего действия указанных шумовых компонентов в спектрах для эталонного и контролируемого образцов оборудования, а в заключение фиксируют в этих спектрах интенсивности фликкерных шумов на максимальной частоте доминирующего действия фликкерного компонента шума в спектре контролируемого образца оборудования, т.е. на частоте  , и из сравнения фиксированных интенсивностей в спектрах для эталонного и контролируемого образцов оборудования определяют полную дефектность контролируемого образца оборудования.
, и из сравнения фиксированных интенсивностей в спектрах для эталонного и контролируемого образцов оборудования определяют полную дефектность контролируемого образца оборудования.
| СПОСОБ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕКТРОЭНЕРГЕТИЧЕСКОГО ОБОРУДОВАНИЯ | 2006 |
|
RU2311652C1 |
| СПОСОБ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕКТРОЭНЕРГЕТИЧЕСКОГО ОБОРУДОВАНИЯ | 2010 |
|
RU2476895C2 |
| СПОСОБ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕКТРОЭНЕРГЕТИЧЕСКОГО ОБОРУДОВАНИЯ | 2007 |
|
RU2351939C2 |
| US 6054949 А, 25.04.2000. | |||

