[0001] Изобретение относится к устройствам, которые перемещаются на основе колебательных движений и/или вибрации.
[0002] Одним примером перемещения при помощи вибрации является электронный футбол, работающий на основе вибрации. Вибрирующая горизонтальная металлическая поверхность вызывает случайное или слегка направленное перемещение неодушевленных пластиковых фигур.
[0003] Одним из способов создания вибраций, вызывающих движения, является использование коллекторных двигателей, которые вращают вал, прикрепленный к противовесу. Вращение противовеса вызывает колебательное движение. Источники питания запускают заводные пружины, которые запускаются вручную или при помощи электродвигателей постоянного тока. Самая последняя тенденция заключается в использовании двигателей для пейджера, предназначенных для вибрации пейджера или сотового телефона в беззвучном режиме. Vibrobots и Bristlebots являются двумя примерами современных средств перемещения, использующих вибрацию, чтобы вызвать движение. Например, в небольших, роботизированных устройствах, таких как Vibrobots и Bristlebots, для создания вибрации могут использоваться двигатели с противовесами. Лапки (ножки) роботов представляют собой, как правило, металлические провода или жесткие пластиковые щетинки. Вибрация способствует вибрированию всего робота сверху донизу, а также его вращению. Эти роботизированные устройства, как правило, перемещаются и вращаются медленно, так как не достигается никакого существенного направленного управления.
[0004] Vibrobots в качестве ножки используют длинную металлическую проволоку. Форма и размер этих средств перемещения меняется в широком диапазоне, обычно от коротких 2-х дюймовых устройств до высоких 10-и дюймовых устройств. Чтобы не повредить поверхность стола и изменить коэффициент трения, к ножкам часто добавляются резиновые ступни, Vibrobots обычно имеют 3 или 4 лапки, хотя существует и конструкция с 10-20 ножками. Вибрация тела и ножки создает характер движения, которое в основном является случайным с точки зрения направленности и вращения. Столкновение со стенами не приводит к перенаправлению, и в результате стена только ограничивает движение в данном направлении. Реалистичность движения очень низкая в связи с высоким уровнем случайных движений.
[0005] Bristlebots иногда описываются в литературе как крошечные приспособленные для направленного перемещения Vibrobots. В Bristlebots используются сотни коротких нейлоновых щетинок для ножек. Наиболее распространенным источником щетинок и тела средства перемещения является использование всей головки зубной щетки. Двигатель для пейджера и аккумулятор завершают типичную конструкцию. Движение может быть случайным и ненаправленным в зависимости от ориентации двигателя и тела и направления щетины. Конструкции, которые используют щетинки, расположенные под углом к задней стороне с прикрепленным коллекторным двигателем, могут двигаться с общим направлением вперед с различными поворотами и перемещением вбок. Столкновение с объектами, например, стенами, заставляет средство перемещения остановиться, затем повернуть налево или направо и двигаться вперед. Уровень реалистичных движений минимален благодаря скользящим движением и зомбиподобной реакцией на удары об стену.
КРАТКОЕ ИЗЛОЖЕНИЕ ИЗОБРЕТЕНИЯ
[0006] Один инновационный аспект предмета, предложенного в данном описании, может быть воплощен в устройстве, которое включает в себя тело, вибрационный механизм, присоединенный к телу, и множество конечностей, каждая из которых имеет основание конечности, близко расположенное к телу и верхнюю часть конечности, которая располагается на расстоянии от тела. По меньшей мере, часть из множества конечностей способствует тому, чтобы устройство перемещалось по поверхности вперед за счет продольного смещения между основанием конечности и верхушкой конечности, как только вибрационный механизм заставляет устройство вибрировать. Кроме того, множество конечностей включают в себя две или более конечностей, расположенных таким образом, чтобы верхушки двух или более конечностей могли контактировать с противоположными поверхностями для получения результирующей силы в направлении, в общем, определенном продольным смещением между основанием конечности и верхушками двух или более конечностей, как только вибрационный механизм вызывает вибрацию устройства.
[0007] Эти и другие варианты воплощения изобретения могут включать в себя один или более из следующих признаков. Противоположные поверхности включают в себя, по меньшей мере, две поверхности. Противоположные поверхности включают в себя противоположные поверхности, которые, по существу, параллельны друг другу. По меньшей мере, две поверхности расположены на, по меньшей мере, закрытом канале. Результирующая сила, определяющая смещение между основанием конечности и верхушкой двух или более конечностей превышает противоположную силу тяжести на устройстве. Результирующая сила дает возможность устройству подниматься между, по существу, вертикальными противоположными поверхностями. Каждая из двух или более конечностей, в результате контакта с соответствующей поверхностью, производят результирующую силу, которая включает в себя положительную составляющую силу в направлении, по существу перпендикулярном к соответствующей поверхности и положительную составляющую силу в направлении, в общем, определенном продольным смещением между основанием конечностей и верхушкой конечности. Положительная составляющая сила в направлении, по существу перпендикулярном соответствующей поверхности одного из двух или более конечностей, по существу, противоположна положительной составляющей силе в направлении, по существу, перпендикулярном к соответствующей поверхности, для, по меньшей мере, другой из двух или более конечностей. Множество конечностей включают в себя множество ножек, расположенных в основном в первом направлении, а также две или более конечности включают в себя первую конечность, расположенную во втором направлении, по существу, противоположном первому направлению. Две или более конечности дополнительно включают в себя, по меньшей мере, две ножки из множества ножек, и, по меньшей мере, две ножки и первая конечность предназначены для поднятия устройства между, по существу, вертикальными поверхностями, которые расположены таким образом, что верхушки конечностей, по меньшей мере, двух ножек и верхушка первой конечности применяют чередующуюся силу на противоположных поверхностях. Ножки расположены в два ряда, основание конечности ножки в каждом ряду присоединяются к телу, по существу, вдоль бокового края тела. Тело включает в себя корпус, коллекторный двигатель находится внутри корпуса, ножки соединены с частью корпуса у основания ножки, и, по меньшей мере, часть корпуса расположена между двумя рядами ножек. По меньшей мере, одна из двух или более конечностей прикреплена к телу с возможностью съема. Множество конечностей включают в себя множество ножек, расположенных в основном в первом направлении, и две или более конечности включают в себя: первую конечность, как правило, расположенную во втором направлении, по существу, перпендикулярном первому направлению; и вторую конечность, как правило, расположенную в третьем направлении, по существу, перпендикулярном первому направлению, и, по существу, противоположную второму направлению. Вибрационный механизм включает в себя коллекторный двигатель, который вращает эксцентричную нагрузку. Множество вращающихся частей включают в себя множество ножек, расположенных в основном в первом направлении, коллекторный двигатель имеет ось вращения, которая проходит в пределах приблизительно 20% центра тяжести устройства от высоты устройства, а также корпус выполнен с возможностью облегчения перекатывания устройства вокруг продольного центра тяжести устройства на основе вращения эксцентрической нагрузки, устройство располагается, по существу, на плоской поверхности, когда ножки не ориентированы таким образом, что верхушка ножки, по меньшей мере, одной ножки на каждой боковой стороне контактирует с горизонтальной поверхностью. Множество ножек расположены в два ряда, а ряды располагаются, по существу, параллельно оси вращения коллекторного двигателя, и, по меньшей мере, некоторые из верхушек ножек, которые контактируют с, по существу, плоской поверхностью, как правило, препятствуют перекатыванию устройства, благодаря расстоянию между двумя рядами ножек, когда ножки ориентированы таким образом, что верхушка ножки, по меньшей мере, одной ножки на каждой боковой стороне тела контактирует с, по существу, плоской поверхностью. По меньшей мере, одна из двух или более конечностей направляются вперед относительно продольного центра тяжести устройства. Каждая из множества конечностей изготовлены из гибкого материала, литьем под давлением, и вставляются в тело у основания конечности. Силы от вращения эксцентрической нагрузки взаимодействуют с силой упругости, по меньшей мере, одной приводной конечности, и, по меньшей мере, одна приводная конечность отрывается от опорной поверхности, когда устройство передвигается вперед. Коэффициента трения части, по меньшей мере, подмножества ножек, которые контактируют с опорной поверхностью, достаточно, чтобы, по существу, устранить перемещение вбок. Эксцентричная нагрузка создается с возможностью расположения в направлении переднего конца устройства по отношению к приводным конечностям, а передний конец устройства определяется концом в направлении, в котором перемещается устройство, когда коллекторный двигатель вращает нагрузку с эксцентриком. Множество конечностей встроены в, по меньшей мере, часть тела. По меньшей мере, подмножество из множества конечностей, в том числе две или более конечностей, изогнуты, а отношение радиуса кривизны изогнутых конечностей к длине конечностей находится в пределах от 2,5 до 20.
[0008] В общем, один инновационный аспект предмета, представленный в данном описании, может быть воплощен в способах, которые включают в себя действия, вызывающие вибрацию приводимого в действие вибрацией устройства, и в результате чего устройство поднимается, по существу, в наклонном положении, и по меньшей мере, частично включает путь с использованием двух или более конечностей, которые вызывают отклонение, обеспечивая перемещение устройства вперед и вызывая сопротивление движению в обратном направлении, противоположном направлению вперед. Устройство, приводимое в действие при помощи вибрации, включает в себя тело и множество формованных ножек, каждая из которых имеет основание ножки и верхушку ножки на дальнем конце по отношению к основанию ножки. Ножки соединены с телом у основания ножки и включают в себя, по меньшей мере, одну эластомерную приводную ножку, а вибрация приводит к тому, что устройство перемещается вперед, как правило, за счет смещения между основанием ножки и верхушки ножки, по меньшей мере, одной приводной ножки, как только устройство начинает вибрировать. Две или более конечности дополнительно обеспечивают на устройстве, по существу, противоположные силы, при этом каждая противоположная сила действует в направлении, по существу, ортогональном по отношению к направлению вперед.
[0009] Эти и другие варианты воплощения изобретения могут включать в себя один или более из следующих признаков. Устройство поддерживается на поверхности и приводится в движение по поверхности в направлении вперед, как правило, за счет смещения между основанием ножки и верхушкой ножки, по меньшей мере, одной приводной ножки, как только устройство начинает вибрировать. Вибрация устройства побуждает, по меньшей мере, одну приводною ножку отклоняться в направлении, противоположном направлению вперед без существенного скольжения, по меньшей мере, одной приводной ножки по поверхности, когда результирующая сила, действующая на, по меньшей мере, одну приводную ножку, направлена вниз, и упругость, по меньшей мере, одной эластомерной приводной ножки приводит к тому, что, по меньшей мере, одна приводная ножка отклоняется вперед, когда результирующая сила, действующая на по меньшей мере, одну приводную ножку направлена вверх. Стимулирование вибрации включает в себя вращение эксцентричной нагрузки. Две или более конечности прикреплены к телу устройства. По меньшей мере, одна из двух или более конечностей содержит одну из множества ножек и, по меньшей мере, одна из двух или более конечностей прикреплена к верхней части тела. Две или более конечности крепятся к трубопроводу и соприкасаются с телом устройства. Две или более конечности содержат, по меньшей мере, три конечности. Две или более конечности приспособлены таким образом, чтобы устройство поднималось на вертикальный трубопровод. Две или более конечности прикреплены к телу устройства, и трубопровод, тело устройства, и две или более конечности сконфигурированы таким образом, чтобы каждая из двух или более конечностей находилась в контакте с внутренней поверхностью трубопровода в течение достаточного периода времени, чтобы произвести движение вперед. Вибрация устройства способствует отклонению, по меньшей мере, одной из двух или более конечностей в направлении, противоположном направлению вперед без существенного скольжения, по меньшей мере, одной конечности на соответствующей внутренней поверхности трубопровода, когда результирующая сила, направленная на, по меньшей мере, одну конечность, направлена на соответствующую внутреннюю поверхность, и упругость, по меньшей мере, одной конечности способствует отклонению, по меньшей мере, одной конечности вперед, когда результирующая сила, действующая по меньшей мере, на одну конечность, направлена от соответствующей внутренней поверхности.
[0010] Один инновационный аспект предмета, предложенный в данном описании, может быть воплощен в устройстве, которое содержит тело, вибрационный механизм, соединенный с телом, и множество конечностей, каждая из которых имеет основание конечности, расположенное вблизи тела, и верхушку конечности, расположенную на расстоянии от тела. По меньшей мере, подмножество из множества конечностей проходят от тела и расположены таким образом, что каждая из конечностей в подмножестве соприкасается с одной из множества, по существу, параллельных поверхностей и предназначены для поднятия устройством вверх, по существу, наклонной поверхности, как только вибрация, вызванная вибрационным механизмом приводит к тому, что конечности в подмножестве, по меньшей мере, попеременно контактируют с одной из множества, по существу, параллельных поверхностей.
[0011] Эти и другие варианты воплощения изобретения могут включать в себя один или более из следующих признаков. Вибрация, вызванная вибрационным механизмом, способствует сохранению постоянного контакта, по меньшей мере, одной конечности из подмножества с одной из множества, по существу, параллельных поверхностей и, по меньшей мере, одна из конечностей из подмножества, попеременно контактирует и отрывается от противоположной поверхности из множества, по существу, параллельных поверхностей. По меньшей мере, одна из конечностей из подмножества поддерживает, по меньшей мере, по существу, постоянный контакт с одной из множества, по существу, параллельных поверхностей и, по меньшей мере, одна из конечностей из подмножества поддерживает, по существу, постоянный контакт с противоположной поверхностью из множества, по существу, параллельных поверхностей. Контакт каждой из, по меньшей мере, двух конечностей из подмножества с соответствующей одной из множества поверхностей обеспечивает, по существу, противоположные силы, которые облегчают подъем, по существу, наклонной поверхности посредством устройства. Подмножество из множества конечностей предназначено для направления силы вперед, как правило, за счет продольного смещения основания конечности, расположенной близко к телу, и верхушки конечности, расположенной на расстоянии от тела, так как вибрационный механизм, поддерживает постоянный контакт конечностей с двумя попеременно контактирующими параллельными поверхностями. Каждая из конечностей в подмножестве изогнута в направлении, по существу, противоположном направлению вперед и изготовлена из эластомерного материала.
[0012] Один из новаторских аспектов предмета, представленных в данном описании, может быть воплощен в системе, включающей в себя наклонный трубопровод с двумя, по существу, противоположными параллельными поверхностями, автономное устройство, содержащее тело, вибрационный механизм, присоединенный к телу и множество конечностей, каждая из которых имеет основание, расположенное близко к телу и верхушку, расположенную на расстоянии от тела. По меньшей мере, часть из множества конечностей предназначены для перемещения устройства по поверхности вперед, как правило, за счет продольного смещения между основанием конечности и верхушкой конечности, как только вибрационный механизм вызывает вибрацию устройства. Множество конечностей включают в себя две или более конечности, расположенные таким образом, что верхушки двух или более конечностей могут соприкасаться с двумя, по существу, параллельными противоположными поверхностями для получения результирующей силы в направлении, в общем, определенном продольным смещением между основанием и верхушкой двух или более конечностей, как только вибрационный механизм заставляет устройство вибрировать. Результирующая сила заставляет автономное устройство подниматься по наклонному трубопроводу.
[0013] Эти и другие варианты воплощения изобретения могут включать в себя один или более из следующих признаков. Трубопровод содержит трубку. Трубопровод имеет ширину, достаточную, чтобы два автономных устройства могли разъехаться. Трубопровод включает в себя, по меньшей мере, один прямой компонент, изогнутый компонент, компонент пересечения или разъем. Множество компонентов трубопровода выполнены с возможностью соединения для создания одного целого.
[0014] Детали одного или нескольких вариантов воплощения изобретения, упомянутые в данном описании, изложены в прилагаемых чертежах и в описании ниже. Другие признаки, аспекты и преимущества предмета станут очевидными из описания, чертежей и формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0015] На фиг. 1 представлена схема, которая иллюстрирует приведенный пример устройства, приводимое в действие при помощи вибрации.
[0016] На фиг. 2А, 2В, 3А, 3В представлены схемы, иллюстрирующие примеры силы, которые участвуют в перемещении устройства, приводимого в действие при помощи вибрации согласно фиг. 1.
[0017] На фиг. 4 представлен вид спереди примера, указывающего центр тяжести для устройства.
[0018] На фиг. 5 представлен вид сбоку примера, указывающего центр тяжести для устройства.
[0019] На фиг. 6 представлен пример устройства, которое включает в себя пару боковых конечностей для подъема.
[0020] На фиг. 7А и 7В представлены примерные размеры устройства.
[0021] На фиг. 7С и 7D представлен пример съемных и присоединяемых конечностей для устройства.
[0022] На фиг. 7Е и 7F представлен другой пример съемных и присоединяемых конечностей для устройства.
[0023] На фиг. 8 представлен один пример конфигурации примерных материалов, из которых может быть выполнено устройство.
[0024] На фиг. 9А представлен пример среды, в которой устройство может работать и подниматься внутри трубопровода.
[0025] На фиг. 9В представлен пример среды, в которой устройство может подняться внутри и почти до верхней части трубопровода.
[0026] На фиг. 9С представлен пример контура трубопровода в виде двойной петли.
[0027] На фиг.9D представлена схема трубопровода, адаптированная для облегчения подъема устройством, приводимым в действие при помощи вибрации.
[0028] На фиг. 10А представлена схема последовательности операций процесса для эксплуатации устройства, приводимого в действие при помощи вибрации.
[0029] На фиг. 10В представлена схема последовательности операций процесса для подъема устройства, приводимого в действие при помощи вибрации.
[0030] На фиг. 11 представлена схема последовательности операций процесса для конструирования устройства, приводимого в действие при помощи вибрации.
[0031] На фиг. 12А представлен пример трубки обитания, в которой могут работать и взаимодействовать несколько устройств.
[0032]На фиг. 12В представлен вид сверху трубки обитания.
[0033] На фиг.13A-13D представлены различные виды примерной сборки прямой трубки.
[0034] На фиг.13E-13G представлен пример размеров сборки прямой трубки.
[0035] На фиг. 13Н-13К представлены различные виды примерной сборки изогнутой трубки.
[0036] На фиг.13L-13Q представлены различные виды примерной сборки Y-образной трубки.
[0037] На фиг.13R-13W представлены различные виды примерной сборки трубки с петлей.
[0038] На фиг.14A-14D представлены различные виды примерного разъема.
[0039] На фиг. 14Е-14Н представлены различные виды другого примерного разъема.
[0040] На фиг. 15А представлен вид сбоку альтернативного устройства, приводимого в действие при помощи вибрации.
[0041] На фиг. 15В представлен вид сверху альтернативного устройства, приводимого в действие при помощи вибрации.
[0042] На фиг. 15С представлен вид спереди альтернативного устройства, приводимого в действие при помощи вибрации.
[0043] На фиг. 15D представлен вид сбоку альтернативного устройства, приводимого в действие при помощи вибрации во время перемещения через примерный изогнутый направленный вверх трубопровод.
[0044] Схожие ссылочные номера и обозначения на различных чертежах указывают одни и те же элементы.
ПОДРОБНОЕ ОПИСАНИЕ
[0045] Небольшие роботизированные устройства или средства для перемещения, приводимые в действие при помощи вибрации, могут предназначаться для перемещения по поверхности, например, полу, столу, другой относительно ровной или гладкой поверхности, или выпуклой или вогнутой (например, в любом направлении) изогнутой поверхности. Роботизированное устройство выполнено с возможностью перемещения автономно и, в некоторых воплощениях, в случайных направлениях. В общем, роботизированные устройства включают в себя тело (или корпус), с множеством конечностей (например, ножки и другие конечности) и вибрационный механизм (например, двигатель или пружинный механический заводной механизм, вращающий эксцентричную нагрузку, двигатель или другой механизм, выполненный с возможностью колебания противовеса, или другое устройство с компонентами, приспособленными к быстрому изменению центра массы устройства). В результате, миниатюрные роботизированные устройства при перемещении могут напоминать органическую жизнь, например, жуков или насекомых.
[0046] Движение роботизированного устройства может быть вызвано движением вращающегося двигателя внутри, или прикрепленного к устройству, в сочетании с вращением веса с центром массы, который смещен относительно оси вращения двигателя. Вращательное движение веса вызывает вибрацию двигателя и автоматизированного устройства, к которому он присоединен. В некоторых воплощениях изобретения вращение находится приблизительно в диапазоне 6000-9000 оборотов в минуту (об/мин), хотя также могут использоваться и более высокие или более низкие значения. В качестве примера, в устройстве можно использовать такой тип механизма вибрации, который применяется во многих пейджерах и сотовых телефонах, которые в режиме вибрации, заставляют пейджер или телефон вибрировать. Вибрация, вызванная вибрационным механизмом, может перемещать устройство по поверхности (например, полу), например, с помощью ножек, выполненных с возможностью попеременно сгибаться (в определенном направлении) и возвращаться в исходное положение, так как вибрация перемещает устройство вверх и вниз.
[0047] Роботизированное устройство может включать в себя различные функции. Например, различные воплощения устройства могут включать в себя вариации определенных функций, например форму ножки и/или других конечностей, количество ножек и/или других конечностей, фрикционные характеристики ножки и/или других конечностей, относительная жесткость или гибкость ножки и/или других конечностей, упругость ножки и/или других конечностей, относительное расположение вращающегося противовеса по отношению к ножкам и/или другим конечностям/ножкам и т.д. Например, изменения некоторых функций могут обеспечить эффективную передачу вибраций, направленных на движение вперед, в том числе движение вперед, которое обеспечивает подъем устройства на любой угол и при любой ориентации, в том числе в прямом или перевернутом положениях, а также в боковом направлении. Скорость и направление движения роботизированного устройства может зависеть от многих факторов, в том числе от скорости вращения двигателя, размера смещения веса в двигателе, питания, характеристик (например, размер, ориентация, форма, материал, устойчивость, фрикционные характеристики и т.д.) конечностей, прикрепленных к корпусу устройства, свойств поверхности, на которой работает устройство, общий вес устройства, и так далее. Наряду с тем, что конечности включают в себя ножки, на которые опирается устройство на, по существу, плоской поверхности и с помощью которых обеспечивается перемещение вперед на поверхности, конечности также могут включать в себя конечности, не представляющие собой ножки (например, на верхней или боковой сторонах устройства), что обеспечивает другие возможности передвижения для устройства, например, способность устройства подняться таким образом, как будет представлено ниже.
[0048] В некоторых вариантах воплощения изобретения устройства включают в себя функции, направленные на компенсирование тенденции устройства поворачивать в результате вращения противовеса и/или изменение тенденции, и направления поворота между различными роботизированными устройствами. Компоненты устройства могут быть расположены таким образом, чтобы поддерживать относительно низкий центр тяжести (или центр массы), что препятствует опрокидыванию (например, за счет расстояния между верхушками ножек) и выровнять компоненты с осью вращения вращающегося двигателя для стимуляции перекатывания (например, когда устройство расположено не вертикально). Точно так же, устройство может предназначаться для самоспрямления за счет функций, которые, как правило, стимулируют перекатывание, когда устройство находится на спине или на боку в сочетании с относительной плоскостностью устройства, когда оно находится в вертикальном положении (например, когда устройство "стоит" на его верхушках ножек). Особенности устройства также могут использоваться для повышения уровня случайного перемещения и чтобы обеспечить разумное реагирование устройства на препятствия. Различные конфигурации ножек и их размещение также могут обеспечить различные типы перемещения и/или различные реакции на вибрацию, препятствия или другие силы. Кроме того, регулировка длины ножек может быть использована для обеспечения некоторой степени способности к рулению. В некоторых вариантах воплощения изобретения роботизированные устройства могут имитировать реальные объекты, например, ползающих жуков, грызунов или других животных и насекомых.
[0049] На фиг. 1 представлена схема, которая иллюстрирует пример устройства, приводимого в действие при помощи вибрации 100, которое имеет форму жука. Устройство 100 включает в себя тело (например, корпус 102, напоминающий тело жука) и конечности (например, ножки 104). Внутри (или прикрепленные к) корпусу 102 располагаются компоненты, которые контролируют и обеспечивают перемещение устройства 100, в том числе вращающийся двигатель, блок питания (например, батарея), и переключатель вкл./выкл. Каждая из конечностей (например, ножки 104) включает в себя верхушку конечности (например, верхушка ножки 106а) и основание конечности (например, основание ножки 106 В). Основания конечностей располагаются близко к телу, а верхушки конечностей располагаются на расстоянии от тела. Свойства конечностей (например, ножек 104), в том числе положение каждого основания конечности (например, основание ножки 106b) по отношению к верхушке конечности (например, верхушки ножки 106а) могут влиять на направление и скорость, при которой перемещается устройство 100. Например, каждое основание конечности расположена дальше по направлению вперед, чем верхушка, и такая конфигурация позволяет устройству 100 двигаться вперед. Устройство 100 изображено в вертикальном положении (т.е. стоя на ножках 104) на опорной поверхности 110 (например, по существу плоский пол, столешница и т.д., что противодействует силе гравитации).
[0050] Как показано на фиг. 1, корпус 102 содержит, по меньшей мере, переднюю 111а, заднюю 111b, боковую стороны, верхнюю и нижнюю стороны. Устройство 100 стремится двигаться по направлению к передней стороне 111а устройства 100 на основе конфигурации конечностей. Множество конечностей включает в себя множество ножек 104, которые, как правило, располагаются в первом направлении (например, проходящем, по существу, вниз от нижней части корпуса 102). Множество конечностей также включают в себя одну или несколько других конечностей, не представляющих собой ножки, расположенные, по меньшей мере, во втором направлении (например, проходящем, по существу, вверх от верхней части корпуса 102, наружу от боковой стороны корпуса 102, или их сочетание). В некоторых вариантах воплощения изобретения первое и второе направления, по существу, противоположны друг другу, в то время как в других вариантах воплощения изобретения конечности, не представляющие собой ножки, располагаются друг напротив друга или в комбинации, обеспечивают силу, которая в значительной степени противопоставлена множеству ножек 104 при контакте конечностей с поверхностью.
[0051] Например, конечности, не представляющие собой ножки, включают в себя одну или более конечностей для подъема (например, верхняя конечность для подъема 105), которые располагаются в направлении, противоположном ножкам 104. Например, в отличие от ножек 104, которые располагаются, как правило, вниз от корпуса 102 (например, по направлению к поверхности 110), верхняя конечность для подъема 105 располагается снизу-вверх. Как показано на фиг. 1, верхняя конечность для подъема 105 может быть короче длины ножки 104, но достаточно длинной, чтобы подниматься выше, чем самая высокая точка на корпусе 102. Далее, верхняя конечность для подъема 105 может подниматься немного выше от центра тяжести корпуса 102, и немного ниже, или примерно так же, как поднимаются ножки 104 ниже центра тяжести корпуса 102. Как показано, верхняя конечность для подъема 105 может иметь примерно такую же кривизну и наклон, как ножки 104, и верхняя конечность 105 может размещаться таким образом, что верхушка верхней конечности для подъема 105 находится вблизи от верхушек ножек, передних ножек 104а, например, в продольном направлении перемещения устройства.
Также возможны другие варианты воплощения изобретения. Например, верхняя конечность для подъема 105 может располагаться дальше вперед или назад от корпуса 102. В другом примере, верхняя конечность для подъема 105 может иметь другую форму (например, в виде кривой конечности) и размер. В некоторых вариантах воплощения изобретения множество верхних конечностей для подъема 105 может располагаться, например, в ряды и/или столбцы по отношению к направлению устройства 100 вперед.
Общее описание ножки
[0052] Ножки 104 могут включать в себя передние ножки 104а, срединные ножки 104b и задние ножки 104с. Например, устройство 100 может включать в себя пару передних ножек 104а, которые могут работать иначе, чем срединные ножки 104b и задние ножки 104c. Например, передние ножки 104а могут быть сконфигурированы для обеспечения движущей силы для устройства 100 за счет контактирования с подложкой 110 и побуждает устройство прыгать вперед, как только устройство начинает вибрировать. Срединные ножки 104b могут обеспечить опору для противодействия усталости материала (например, после стояния устройства 100 на ножках 104 в течение длительного периода времени), что может привести к тому, что передние ножки 104а деформируются и/или потеряют устойчивость. В некоторых вариантах воплощения изобретения устройство 100 может не включать срединные ножки 104b, а только передние ножки 104а и задние ножки 104c. В некоторых вариантах воплощения изобретения передние ножки 104а и одни или несколько задних ножки 104c выполнены с возможностью контактирования с поверхностью, в то время как срединные ножки 104b могут немного отрываться от поверхности так, чтобы срединные ножки 104b не вносили существенных дополнительных тяговых сил и/или прыжковых сил, которые могут затруднить необходимые движения (например, тенденцию к перемещению по относительно прямой линии и/или необходимому количеству случайных движений).
[0053] В некоторых вариантах воплощения изобретения устройство 100 может быть сконфигурировано таким образом, что только две передние ножки 104а и 104с и одна задняя ножка находятся в контакте с, по существу, плоской поверхностью 110, даже если устройство включает в себя более одной задней ножки 104с и несколько срединных ножек 104b. В других вариантах воплощения изобретения устройство 100 может быть сконфигурировано таким образом, что только одна передняя ножка 104а и две задних ножки 104с находятся в контакте с плоской поверхностью 110. На протяжении всего описания, изложение, относящееся к контакту с поверхностью, может включать в себя относительную степень контакта. Например, когда одна или более из передних ножек 104а и одна или более из задних ножек 104c описаны, как находящиеся в контакте с, по существу, плоской поверхностью 110, и срединные ножки 104b описаны, как не находящиеся в контакте с поверхностью 110, возможно также, что передние ножки 104а, и задние ножки 104c могут быть достаточно длиннее срединных ножек 104b (и достаточно жесткими), таким образом, передние и задние ножки 104а и 104с обеспечивают большую опору для веса устройства 100, чем срединные ножки 104b, даже при условии того, что срединные ножки 104b фактически находятся в контакте с поверхностью 110. В некоторых вариантах воплощения изобретения даже те ножки, которые в меньшей степени создают опору для устройства, могут находиться в контакте, когда устройство 100 находится в вертикальном положении, особенно когда вибрация устройства вызывает движение вверх и вниз, которое сжимает и изгибает приводные ножки и позволяет дополнительным ножкам соприкасаться с поверхностью 110. Можно добиться большей предсказуемости и контроля за движением (например, в прямом направлении) за счет конструирования устройства таким образом, чтобы небольшое количество ножек (например, менее двадцати или менее тридцати) находилось в контакте с опорной поверхностью 110 и/или способствовало бы опоре устройства в вертикальном положении, когда устройство находится либо в состоянии покоя, либо когда вращающаяся эксцентричная нагрузка вызывает движение. В этом отношении, некоторые ножки могут обеспечивать опору, не находясь в контакте с опорной поверхностью 110 (например, одна или несколько коротких ножек могут обеспечивать стабильность за счет контактирования со смежной более длинной ножкой, что повышает общую жесткость смежной длинной ножки). Однако, как правило, каждая ножка достаточно жесткая, таким образом, четыре или меньшее количество ножек способны выдержать вес устройства без существенной деформации (например, менее 5% от высоты основания ножки 106b и опорной поверхности, когда устройство 100 находится в вертикальном положении).
[0054] Для установления различных характеристик движения могут использоваться ножки различной длины, как будет дополнительно описано ниже. Различные ножки могут также включать в себя различные свойства, например, различные жесткости или коэффициенты трения, как будет дополнительно описано ниже. Как правило, ножки могут быть расположены, по существу, параллельно рядами вдоль каждой боковой стороны устройства 100 (например, фиг. 1 изображает один ряд ножек на правой боковой стороне устройства 100; соответствующий ряд ножек (не показан на фиг. 1) может располагаться на левой боковой стороне устройства 100).
[0055] В общем, количество ножек 104, которые обеспечивает полноценную или любую другую опору для устройства, может быть относительно ограниченным. Например, использование менее двадцати ножек, которые контактируют с опорной поверхностью 110 и/или которые обеспечивают опору для устройства 100, когда устройство 100 находится в вертикальном положении (т.е. ориентацию, в которой одна или более приводных ножек 104а находятся в контакте с опорной поверхностью), могут обеспечить большую предсказуемость тенденций направленного перемещения устройства 100 (например, тенденция к перемещению в направлении вперед и прямо), или может повысить тенденцию к относительно быстрому перемещению за счет увеличения потенциала отклонения меньшего количества ножек, или может свести к минимуму количество ножек, которые, возможно, должны подвергнуться изменению для достижения желаемого контроля за направлением, или могут улучшить технологичность меньшего числа ножек с достаточным количеством места для инструментальной обработки. В дополнение к обеспечению опоры путем контактирования с опорной поверхностью 110, ножки 104 могут обеспечивать опору, например, за счет повышения устойчивости ножек, которые контактируют с поверхностью 110. В некоторых вариантах воплощения изобретения каждая из ножек, которая обеспечивает независимую опору устройства 100, способна поддерживать значительную часть веса устройства 100, например, ножки 104 могут быть достаточно жесткими, таким образом, четыре или меньшее количество ножек способны выдержать вес устройства без существенной деформации (например, менее 5% в качестве процентного соотношения высоты основания ножки 106b от опорной поверхности)
[0056] Как описано выше, многие факторы или особенности могут способствовать движению и управлению устройством 100. Например, центр тяжести (ЦТ) устройства и нахождение его впереди или в задней части устройства, может влиять на способность устройства 100 поворачивать. Кроме того, нижний ЦТ может предотвратить опрокидывание устройства 100. Расположение и распределение ножек 104 по отношению к ЦТ также может предотвратить опрокидывание. Например, если пары или ряды ножек 104 на каждой стороне устройства 100 располагаются слишком близко друг к другу, и устройство 100 имеет относительно высокий ЦТ (например, по отношению к боковому расстоянию между рядами или парами ног), устройство 100 может иметь тенденцию к опрокидыванию на бок. Таким образом, в некоторых вариантах воплощения изобретения устройство включает в себя ряды или пары ножек 104, которые обеспечивают более широкое расположение вбок (например, пары передних ножек 104а, срединные ножки 104b, и задние ножки 104с разнесены друг от друга на расстояние, которое определяет приблизительную ширину расположения), чем расстояние между ЦТ и плоской опорной поверхностью, на которой лежит устройство 100 в вертикальном положении. Например, расстояние между ЦТ и опорной поверхностью может находиться в пределах от 50-80% от величины боковой позиции (например, если боковая позиция составляет 0,5 дюймов, ЦТ может находиться в пределах от 0.25-0,4 дюймов от поверхности 110). Кроме того, расстояние ЦТ устройства 100 от опорной поверхности по вертикали может находиться в пределах от 40-60% от расстояния между плоскостью, проходящей через верхушки ножек 106а и самой высокой выступающей поверхностью на верхней стороне корпуса 102. В некоторых вариантах воплощения изобретения расстояние 409а и 409b (как показано на фиг. 4) между каждым рядом верхушек ножек 104 и продольной осью устройства 100, которая проходит через ЦТ, может быть примерно меньше или равно расстоянию 406 (как показано на фиг. 4) между верхушками 106а из двух рядов ножек 104 для обеспечения стабильности, когда устройство опирается на оба ряда ножек.
[0057] Устройство 100 также может включать в себя функции, которые обычно компенсируют тенденцию устройства к поворачиванию. Приводные ножки (например, передние ножки 104а) могут быть выполнены таким образом, что одна или несколько ножек на одной боковой стороне устройства 100 могут обеспечить большую приводную силу, чем одна или более соответствующих ножек на другой боковой стороне устройства 100 (например, через относительные длины ножек, относительную жесткость или упругую деформацию, относительное местоположение вперед/назад в продольном направлении, или относительное боковое расстояние от ЦТ). Аналогично, другие ножки (например, задние ножки 104с) могут быть выполнены таким образом, что одна или несколько ножек на одной боковой стороне устройства 100 могут обеспечить большую силу сопротивления, чем одна или более соответствующих ножек на другой боковой стороне устройства 100 (например, через относительные длины ножек, относительную жесткость или упругую деформацию, относительное местоположение вперед/назад в продольном направлении, или относительное боковое расстояние от ЦТ). В некоторых вариантах воплощения изобретения длины ножек могут регулироваться либо в процессе изготовления или вследствие изменения (например, можно увеличить или уменьшить) тенденции устройства к поворачиванию.
[0058] Геометрия ножек 104 также может влиять на перемещение устройства. Например, продольное смещение верхушек ножек (т.е. концевая часть ножки, которая касается поверхности 110) и основания ножки (т.е. концевая часть ножки, которая прикрепляется к корпусу устройства), любых приводных ножек вызывает движение прямо, как только устройство начинает вибрировать. А также некоторая кривизна, по меньшей мере, у приводных ножек, дополнительно облегчает движение вперед, так как ножки, как правило, должны сгибаться, чтобы переместить устройство вперед, когда вибрация заставляет устройство идти вниз и затем отпрыгивать обратно в более прямой конфигурации, как только вибрации заставляют устройство идти вверх (например, полностью или частично отскакивать от поверхности, так, чтобы верхушки ножек двигались вперед выше, или скользили вперед по поверхности 110).
[0059] Способностью ножки является стимулирование поступательного движения частично с возможностью вибрации устройства вертикально на упругих ножках. Как показано на фиг. 1, устройство 100 включает в себя нижнюю часть 122. Блок питания и двигатель устройства 100 могут располагаться в камере, которая находится, например, между нижней частью 122 и верхней частью тела устройства. Длина ножки 104 создает пространство 124 (по меньшей мере, в непосредственной близости от приводных ножек) между нижней частью 122 и поверхностью 110, на которой работает устройство 100. Размер пространства 124, зависит от того, насколько ниже устройства опускаются ножки 104 относительно нижней части 122. Пространство 124 обеспечивает место для устройства 100 (по меньшей мере, в непосредственной близости от приводных ножек), чтобы переместить его вниз, как только периодическая сила, направленная вниз, полученная в результате вращения эксцентрической нагрузки вызывает изгибание ножки. Такое движение вниз может облегчить движение вперед за счет изгиба ножек 104.
[0060] Устройство может также включать в себя самовыпрямление, например, если устройство 100 переворачивается или опрокидывается на бок или назад. Например, выполнение устройства 100 таким образом, чтобы ось вращения двигателя и эксцентрическая нагрузка приблизительно совпадали с продольным ЦТ устройства 100, способствует прокатке устройства 100 (в направлении, противоположном вращению двигателя и эксцентрической нагрузки). Кроме того, выполнение корпуса устройства таким образом, чтобы препятствовать опрокидыванию устройства на верхнюю часть или на бок (например, с использованием одного или нескольких выступов на верхней части и/или боковых сторонах корпуса устройства) и увеличить способность устройства подпрыгивать, когда оно переворачивается наверх или бок, что может повысить прокатку устройства. Кроме того, изготовление ножек из достаточно гибкого материала и создание зазора на ходовой части корпуса, которую верхушки ножек подгибают вовнутрь, может облегчить перемещение устройства с боковой части в вертикальное положение.
[0061] На фиг. 1 показано плечо 112 тела и головка 114 боковой поверхности, которая может быть выполнена из резины, эластомеров или другого упругого материала, что способствует самовосстановлению устройства сразу после опрокидывания. Отскок от плеча 112 и головки 114 боковой поверхности может быть значительно больше, чем боковой отскок от ножки, которые могут быть выполнены из резины или другого эластомерного материала, но которые могут быть менее устойчивыми, чем плечо 112 и головка 114 боковой поверхности (например, в связи с относительной поперечной жесткостью плеча 112 и головки 114 боковой поверхности по сравнению с ножкой 104). Резиновые ножки 104, которые можно сгибать вовнутрь по направлению к телу 102, как только устройство 100 начинает перекатываться, повышают способность к самовосстановлению, особенно в сочетании с силой вращения, вызванной вращением эксцентрической нагрузки. Отскок от плеча 112 и головки боковой поверхности 114 может также позволять устройству 100 стать достаточно воздушным, чтобы сила вращения, вызванная вращением эксцентриковой нагрузки, могла бы вызвать прокрутку устройства, тем самым облегчая самовосстановление.
[0062] Устройство также может быть выполнено так, что включает в себя возможность случайных движений, которые заставляют устройство 100 вести себя, как насекомое или другой живой объект. Например, вибрация, вызванная вращением эксцентрической нагрузки, может дополнительно вызвать скачки, благодаря кривизне и "наклону" ножки. Скачки могут вызвать дальнейшее вертикальное ускорение (например, от поверхности 110) и ускорение вперед (например, как правило, по направлению поступательного движения устройства 100). Во время каждого скачка, вращение эксцентрической нагрузки может привести к дальнейшему поворачиванию устройства в одну или другую сторону в зависимости от положения и направления движения эксцентриковой нагрузки. Величина случайного движения может быть увеличена, если для увеличения амплитуды скачка используются относительно более жесткие ножки. Величина случайного движения может зависеть от того, находится ли вращение эксцентриковой нагрузки в фазе или в противофазе (например, противофазное вращение относительно скачков может увеличить случайность движения). На степень случайного движения также могут влиять те условия, при которой перемещаются задние ножки 104с. Например, перемещение задних ножек 104c на обеих боковых сторонах устройства 100 может, как правило, поддерживать перемещение устройства 100 по прямой, в то время как если задние ножки 104с не перемещаются (например, если ножки отскакивают полностью от земли) или задние ножки 104с перемещаются больше на одной стороне устройства 100, чем на другой, как правило, поворот увеличивается.
[0063] Еще одним признаком является "интеллект" устройства 100, который позволяет устройству разумно взаимодействовать с препятствиями, в том числе, например, отскакивать от любых препятствий (например, стены и т.д.), с которыми встречается устройство 100 во время движения. Например, форма носа 108 и материалы, из которых выполнен нос 108, может повысить способность устройства к отскакиванию от препятствий и поворачиванию в сторону от них. Каждый из этих признаков может способствовать перемещению устройства 100 и более подробно будет описан ниже.
[0064] Фиг. 1 иллюстрирует нос 108, который способствует отклонению устройства 100 от препятствий. Левая сторона носа 116а и правая сторона носа 116b формируют нос 108. Стороны носа 116а и 116b могут иметь форму небольшого кончика или принимать другую форму, которая способствует отклонению устройства 100 от препятствий (стен), с которыми сталкивается устройство 100 при передвижении вперед. Устройство 100 может включать в себя пространство внутри головы 118, которое повышает упругость, делая голову более устойчивой к деформации (т.е. уменьшению жесткости). Например, когда устройство 100 сталкивается носом с препятствием, пространство внутри головы 118 позволяет голове устройства 100 сжиматься, что обеспечивает больший контроль над отскоком устройства 100 от препятствия, нежели если бы голова 118 была выполнена из более твердого материала. Пространство внутри головы 118 может также лучше поглощать воздействие, если устройство падает с некоторой высоты (например, стол). Плечо 112 тела и боковая поверхность 114 головы, особенно если они выполнены из резины или другого упругого материала, могут способствовать отклонению или отскоку устройства от препятствий при относительно больших углах падения.
Варианты воплощения изобретения с беспроводным/дистанционным управлением
[0065] В некоторых вариантах воплощения изобретения устройство 100 включает в себя приемник, который может, например, принимать команды от пульта дистанционного управления. Команды могут быть использованы, например, для управления скоростью и направлением устройства, и для определения нахождения устройства в движении или в неподвижном состоянии. В некоторых вариантах воплощения изобретения элементы управления в пульте дистанционного управления могут замыкать и размыкать цепь, соединяющую блок питания (например, батарею) с двигателем устройства, позволяя оператору пульта дистанционного управления запускать и останавливать устройство 100 в любое время. Другие элементы управления (например, джойстик, регулятор, и т.д.) в пульте дистанционного управления предназначаются для вращения двигателя в устройстве 100 быстрее или медленнее, влияя на скорость устройства 100. Элементы управления могут отправить различные сигналы приемнику на устройстве 100, в зависимости от команд, которые соответствуют движению элементов управления.
Элементы управления также могут включать и выключать второй двигатель, подключенный ко второй эксцентричной нагрузке в устройстве 100 для изменения поперечных сил для устройства 100, тем самым изменяя способность устройства включаться и тем самым осуществлять контроль над рулевым управлением. Элементы управления в пульте дистанционного управления могут также вызывать работу механизмов в устройстве 100, направленную на удлинение или укорачивание одной или нескольких ножек и/или отклонение одной или более ножки вперед, назад, вбок или для осуществления рулевого управления.
Движение ног и скачки
[0066] На фиг. 2А-3В представлены схемы, иллюстрирующие примеры сил, которые вызывают перемещение устройства 100 согласно фиг. 1. Некоторые силы возникают за счет вращающегося двигателя 202, который позволяет устройству 100 перемещаться автономно по всей поверхности 110. Например, двигатель 202 может вращать эксцентричную нагрузку 210, которая генерирует момент и векторы силы 205-215, как показано на фиг. 2А-3В. Движение устройства 100 может также частично зависеть от положения ножки 104 по отношению к противовесу 210, прикрепленному к вращающемуся двигателю 202. Например, размещение противовеса 210 впереди передних ножек 104а будет увеличивать способность передних ножек 104а к обеспечению приводной силы первичного хода вперед (т.е. сосредоточение больше на силы, направленные вверх и вниз, у передних ножек). Например, расстояние между противовесом 210 и верхушками приводных ножек может находиться в пределах от 20-100% от средней длины приводных ножек. Перемещение противовеса 210 назад по отношению к передним ножкам 104а может положительно повлиять на создание движущей силы другими ножками.
[0067] Фиг. 2 показывает вид сбоку примера устройства 100, представленного на фиг. 1, и дополнительно представлен вращательный момент 205 (представленного скоростью вращения и крутящего момента двигателя Tm) и вертикальная сила 206, выраженная Fv. На Фиг. 2В представлен вид сверху примера устройства 100, показанного на фиг. 1 и дополнительно представлена горизонтальная сила 208, выраженная Fh. Как правило, отрицательная Fv вызвана восходящим движением эксцентрической нагрузки при ее вращении, а положительная Fv вызвана нисходящим движением эксцентрической нагрузки и/или упругостью ножки (например, когда ножки отпрыгивают от отклоненного положения).
[0068] Силы Fv и Fh вызывают движение устройства 100 в направлении, которое соответствует конфигурации, в котором основание ножки 106b расположено в передней части верхушки ножки 106а. Направление и скорость, с которой устройство 100 перемещается, может зависеть, по меньшей мере, частично от направления и величины Fv и Fh. Когда вертикальная сила 206 Fv - отрицательная, тело устройства 100 направляется вниз. Такая отрицательная Fv заставляет, по меньшей мере, передние ножки 104а сгибаться и сжиматься. Ножки, как правило, сжимаются вдоль линии от верхушки ножки до основания ножки. В результате, тело будет опираться таким образом, чтобы ножки изгибались (например, основание ножки 106b сгибается (или отклоняется) у верхушки ножки 106а к поверхности 110) и побуждали тело двигаться вперед (например, в направлении от верхушки ножки 106а к основанию ножки 106b). Положительная Fv обеспечивает силу, направленную вверх, на устройстве 100, тем самым высвобождая энергию, находящуюся в сжатых ножках (подъем устройства), и в то же время позволяет переместить ножки или прыгнуть вперед в исходное положение. Подъемная сила Fv на устройстве в результате вращения эксцентричной нагрузки в сочетании с силой, полученной при прыжке ножки, позволяет устройству прыгать вертикально от поверхности (или, по меньшей мере, снижает нагрузку на передние ножки 104а) и возвращает ножки 104 к своей нормальной геометрии (т.е. за счет упругости ножки). Освобождение сил, полученных от прыжка ножки, наряду с прямым импульсом, созданным посредством прыжка, продвигает устройство вперед и вверх, на основе угла линии, соединяющей верхушку ножки с основанием ножки, поднимая передние ножки 104а от поверхности 110 (или, по меньшей мере, снижается нагрузка на передние ножки 104а) и возвращая ножки 104 к своей нормальной геометрии (т.е. за счет упругости ножки).
[0069] Как правило, используются две «приводные» ножки (например, передние ножки 104а, по одной с каждой стороны), хотя некоторые варианты воплощения изобретения могут включать в себя только одну приводную ножку или более двух приводных ножки. Ножки, представляющие собой приводные ножки, могут в некоторых вариантах воплощения изобретения быть относительными. Например, даже при использовании только одной приводной ножки, другие ножки могут обеспечивать небольшое количество направленных вперед приводных сил. Во время движения вперед, некоторые ножки 104 могут, как правило, волочиться, а не скакать. Скачок относится к результату движения ножки, при их сгибании и сжатии, а затем они возвращаются к нормальной конфигурации - в зависимости от величины Fv, могут оставаться в контакте с поверхностью или отрываться от поверхности в течение короткого периода времени, как только повышается уровень носа. Например, если эксцентрическая нагрузка расположена в передней части устройства 100, то передняя часть устройства 100 может немного подпрыгнуть, в то время как задняя часть устройства 100, как правило, волочится. В некоторых случаях, однако, даже при эксцентрической нагрузке, расположенной в передней части устройства 100, задние ножки 104С иногда могут отрываться от поверхности, хотя и в меньшей степени, нежели передние ножки 104а. В зависимости от жесткости или упругости ножки, скорость вращения двигателя и степень, до которой скачок находится в фазе или в противофазе с вращением двигателя, продолжительность скачка может варьироваться в пределах от меньшего времени, необходимого для полного вращения двигателя, до времени, необходимого для нескольких оборотов двигателя. Во время скачка, вращение эксцентрической нагрузки может переместить устройство вбок в одну или другую сторону (или в обе стороны в разное время вращения) в зависимости от бокового направления вращения в любой конкретный момент времени, и переместить вверх или вниз (или в оба направления в разное время вращения) в зависимости от вертикального направления вращения в любой конкретный момент времени.
[0070] Увеличение времени скачка может являться фактором увеличения скорости. Чем больше времени устройство находится с оторванными от поверхности 110 ножками (или слегка прикасаясь к поверхности), тем меньше времени некоторые ножки затрачивают на волочение (т.е. создание силы, противоположной направлению движения вперед), как только устройство начинает перемещение вперед. Минимизация времени, затрачиваемого на перемещение ножки вперед (в отличие от прыжка вперед) может уменьшить лобовое сопротивление, вызванное трением ножки, скользящих по поверхности 110. Кроме того, регулировка ЦТ устройства может повлиять на то, принимают ли в прыжке участие только передние ножки или устройство совершает скачок при помощи большинства, если не всех, ножек, отрывая их от земли. При такой балансировке скачка может учитываться ЦТ, масса смещаемого веса и его частота вращения, Fv и его расположение, а также силы скачка и их расположение.
Поворачивание устройства
[0071] Вращение двигателя также способствует образованию боковой силы 208, Fh, которая, как правило, смещается вперед и назад при вращении эксцентрической нагрузки. В общем, при вращении эксцентрической нагрузки (например, благодаря двигателю 202), левые и правые горизонтальные силы 208 равны. Поворот, являющийся результатом действия боковой силы 208 в среднем, является большим в одном направлении (вправо или влево), а нос 108 устройства поднимается, и является большим в противоположном направлении, когда нос 108 устройства и ножки 104 сжимаются. В течение времени, когда центр эксцентричной нагрузки 210 перемещается вверх (в сторону от поверхности 110), к ножкам применяется увеличенные силы, направленные вниз, в результате чего ножки 104 ухватываются за поверхность 110, сводя к минимуму боковой поворот устройства 100, хотя ножки могут немного согнуться в поперечном направлении в зависимости от жесткости ножки 104. В течение времени, когда эксцентричная нагрузка 210 перемещается вниз, силы, направленная вниз, на ножках 104 уменьшается, и направленная вниз сила ножки 104 на поверхности 110 может уменьшиться, что позволит устройству повернуться в течение того времени, пока направленная вниз сила уменьшается. Направление поворота в основном зависит от направления средних поперечных сил, вызванных вращением эксцентрической нагрузки 210 в течение времени, когда вертикальные силы являются положительными в сравнении с тем, когда вертикальные силы являются отрицательными. Таким образом, горизонтальная сила 208, Fh, может вызвать поворот устройства 100 немного больше, когда нос 108 поднимается. Когда нос 108 поднимается, верхушки ножек отрываются от поверхности 110 или к ножкам 104а применяется меньшая сила, направленная вниз, чтобы исключить или уменьшить способность верхушек ножек (например, верхушек ножек 106а) "сцепляться" с поверхностью 110 и обеспечить боковую устойчивость к повороту. Данные функции могут воплощаться для управления несколькими характеристиками движения, либо противодействия или усиления поворота.
[0072] Расположение ЦТ может также влиять на поворот. Несмотря на то что некоторое количество поворотов устройством 100 может быть необходимой функцией (например, чтобы движение устройства казалось случайным), чрезмерные повороты могут быть нежелательными. Можно выполнить несколько конфигураций, чтобы компенсировать (или в некоторых случаях, чтобы воспользоваться преимуществом) тенденцию устройства к повороту. Например, распределение веса устройства 100, или, более конкретно, ЦТ устройства, может повлиять на тенденцию устройства 100 к повороту. В некоторых вариантах воплощения изобретения, где ЦТ находится относительно недалеко от центра устройства 100 и примерно по центру относительно ножки 104 может увеличиваться тенденция устройства 100 к перемещению в относительно прямом направлении (например, не вращается вокруг).
[0073] Применение силы сопротивления для различных ножек 104 является другим способом компенсации тенденции устройства к повороту. Например, силы сопротивления для конкретной ножки 104 могут зависеть от длины ножки, ее толщины, жесткости и типа материала, из которого изготовлена ножка. В некоторых вариантах воплощения изобретения жесткость различных ножек 104 может регулироваться по-разному, например, с различными характеристиками жесткости для передних ножек 104а, задних ножек 104c и срединных ножек 104b. Например, характеристика жесткости ножки может изменяться или настраиваться на основе толщины ножки или материала, используемого для ножки. Увеличение сопротивления (например, за счет увеличения длины ножки, толщины, жесткости, и/или характеристики трения) на одной стороне устройства (например, правой стороне) может помочь компенсировать тенденцию устройства к повороту (например, налево) на основе силы Fh, которая вызывает вращение двигателя и эксцентрической нагрузки.
[0074] Изменение положения задней ножки 104c является еще одним способом компенсации тенденции устройства к повороту. Например, размещение ножки 104 дополнительно к задней части устройства 100 может помочь устройству 100 перемещаться в более прямом направлении. Как правило, более длинное устройство 100, которое имеет относительно большее расстояние между передними и задними ножками 104c может передвигаться в более прямом направлении, чем устройство 100, которое имеет более короткую длину (то есть передние ножки 104а и задние ножки 104c расположены ближе друг к другу), по меньшей мере, когда вращающаяся эксцентрическая нагрузка расположена в передней части устройства 100. Относительное положение самых задних ножек 104 (например, путем размещения самой задней ножки на одной стороне устройства дальше на устройстве, нежели задние ножки на другой стороне устройства) также может компенсировать (или изменить) тенденцию устройства к повороту.
[0075] Также могут использоваться различные способы, направленные на управление перемещением устройства 100, в том числе изменение нагрузки на конкретных ножках, регулирование количества ножек, длины ножки, положения ножки, жесткости ножки и коэффициентов сопротивления. Как показано на фиг. 2В, боковая горизонтальная сила 208, Fh, приводит к тому, что устройство 100, имеет тенденцию к повороту, так как боковая горизонтальная сила 208 в целом имеют тенденцию быть выше в одном направлении, чем в другом, во время скачков. Горизонтальной силе 208, Fh можно найти противопоставление за счет движения устройства 100 в приблизительно прямом направлении. Это может быть достигнуто посредством регулирования геометрии ножки и выбора материала для ножки.
[0076] Фиг. 3 представляет собой схему, которая иллюстрирует вид сзади устройства 100, и дополнительно отображает взаимосвязь вертикальной силы Fv 206 и горизонтальной силы 208 Fh по отношению друг к другу. Данный вид сзади также отображает эксцентрическую нагрузку 210, которая вращается за счет вращения двигателя 202 для генерирования вибрации, как указано посредством вращательного момента 205.
Сила сопротивления
[0077] На фиг. 3В показана схема, которая иллюстрирует вид снизу устройства 100 и дополнительно отображает пример сил ножек 211-214, которые связаны с направлением перемещения устройства 100. В сочетании, эти силы ножек 211-214 могут создать векторы скорости, которые влияют на преобладающее направление движения устройства 100. Вектор скорости 215, представленный посредством Tload являющийся вектором скорости, обусловленный посредством скорости вращения двигателя/эксцентриситета (например, индуцированное смещение нагрузки на двигателе), заставляет сгибаться приводные ножки 104, в результате чего устройство делает выпад вперед, так как он генерирует большие боковые силы в одном направлении, чем в другом, во время скачка. Силы ножек 211-214, представленные в F1-F4, представляют собой реактивные силы ножек 104а1-104с2, соответственно, которые могут быть ориентированы таким образом, что ножки 104а1-104с2, в комбинации, создают противоположный вектор скорости относительно Tload. Как показано на фиг. 3В, Tload является вектором скорости, который обычно регулирует поворот устройства 100 влево (как показано), благодаря тенденции к возникновению больших поперечных сил в одном направлении, нежели в другом, когда устройство отскакивает от поверхности 110. В то же время, силы F1-F2 передних ножек 104а1 и 104а2 (например, полученные вследствие того, что ножки направляют устройство вперед и слегка вбок в направлении эксцентрической нагрузки 210, когда приводные ножки сжимаются) и силы F3-F4 задних ножек 104с1 и 104с2 (полученные в результате сопротивления) влияют на поворот устройства 100 вправо (как показано). (Для ясности, так как фиг. 3В отображает вид снизу устройства 100, направления право-влево, когда устройство 100 находится в вертикальном положении меняются местами.) В общем, если комбинация сил F1-F4 примерно компенсирует боковой компонент Tload, то устройство 100 сможет перемещаться в относительно прямом направлении.
[0078] Управление силами F1-F4 может быть достигнуто несколькими способами. Например, "вектор толчка", созданный передними ножками 104а1 и 104а2 может использоваться для противодействия боковой компоненте скорости, созданной двигателем. В некоторых вариантах воплощения изобретения это может быть достигнуто путем размещения большего веса на передние ножки 104а2 для увеличения силы ножки 212, представленной F2, как показано на фиг. 3В. Кроме того, "вектор перемещения" может также использоваться для противодействия скорости, вызванной двигателем. В некоторых вариантах воплощения изобретения это может быть достигнуто путем увеличения длины задних ножек 104с2 или увеличения коэффициента сопротивления на задних ножках 104с2 для вектора силы 804, представленного F4, на фиг. 3В. Как показано, ножки 104а1 и 104а2 являются передними правыми и левыми ножками устройства, соответственно, и ножки 104с1 и 104с2 являются задними правыми и левыми ножками устройства, соответственно.
[0079] Другими способами, направленными на компенсацию тенденции устройства к повороту, является увеличение жесткости ножки 104 в различных комбинациях (например, за счет того, что одна ножка толще другой или одна ножка выполнена из материала, имеющего естественную большую жесткость). Например, более жесткая ножка прыгает лучше, чем более гибкая ножка. Левая и правая ножки 104 в любой паре ножек могут иметь разные жесткости для компенсации поворота устройства 100, вызванного вибрацией двигателя 202. Более жесткие передние ножки 104а также лучше скачут.
[0080] Другими методами, направленными на компенсацию тенденции устройства к повороту, является изменение относительного положения задних ножек 104с1 и 104с2 таким образом, что векторы сопротивления, как правило, компенсируют поворот, вызванный скоростью двигателя. Например, задняя ножка 104с2 может быть размещена дальше вперед (например, ближе к носу 108), чем задняя ножка 104с1.
Форма ножки
[0081] Геометрия ножки в значительной степени влияет на передвижение устройства 100. Характеристики геометрии ножки включают в себя: например, расположение основания ножки перед верхушкой ножки, изгибание ножки, способность ножки отклоняться, конфигурации, которые приводят к различным силам сопротивления для различных ножек, в том числе ножки, которые не обязательно касаются поверхности, и имеют только три ножки, которые касаются поверхности.
[0082] Как правило, в зависимости от положения верхушки ножки 106а по отношению к основанию ножки 106b, устройство 100 может иметь различные состояния, в том числе скорость и стабильность устройства 100. Например, если верхушка ножки 106а находится почти под основанием ножки 106b, когда устройство 100 расположено на поверхности, движение устройства 100, вызванное двигателем 202, может быть ограничено или вообще не произойти. Это происходит в связи с маленьким наклоном или полным отсутствием наклона к линии в месте, которое соединяет верхушку ножки 106а и основание ножки 106b. Другими словами, отсутствует "прогиб" в лапке 104 между верхушкой ножки 106а и 106b - основанием ножки. Однако если верхушка ножки 106а расположена позади основания ножки 106b (например, дальше от носа 108), устройство 100 может двигаться быстрее, так как увеличивается наклон и изгиб ножки 104, оснащая двигатель 202 такой геометрией ножки, которая в большей степени способствует движению. В некоторых вариантах воплощения изобретения разные ножки 104 (например, которые включают в себя различные пары, или левые ножки противопоставляются правым ножкам) могут иметь разные расстояния между верхушками ножки 106а и основаниями ножки 106b.
[0083] В некоторых вариантах воплощения изобретения ножки изогнуты 104 (например, ножки 104а, как показано на фиг. 2А и ножки 104, как показано на фиг. 1). Например, ввиду того, что как правило, ножки 104, изготавливаются из гибкого материала, изгибы ножки 104 могут повлиять на движение устройства 100 вперед. Изгиб ножки может способствовать движению устройства 100 вперед путем увеличения сжатия ножки по отношению к выпрямленной лапке. Такое увеличенное сжатие может увеличить прыжок устройства, и также может увеличить тенденцию к случайному движению, делая устройство более разумным и/или более похожим на живое. Ножки также могут быть, в некоторой степени, конусообразными от основания ножки 106b до верхушки ножки 106а, что способствует более легкому извлечению из формы при изготовлении.
[0084] Количество ножек может изменяться в различных вариантах воплощения изобретения. В целом, увеличение количества ножек 104 может сделать устройство более стабильным и снизить усталость ножек, которые находятся в контакте с поверхностью 101. Увеличение количество ножек также может повлиять на расположение сопротивления на устройстве 100, если дополнительные верхушки ножки 106а находятся в контакте с поверхностью 110. В некоторых вариантах воплощения изобретения некоторые из ножек (например, срединные ножки 104b) могут быть, по меньшей мере, немного короче, чем другие, так что они, как правило, не соприкасаются поверхностью 110 или почти не влияют на общее трение, что приводит к тому, что верхушки ножек 106а касаются поверхности 110. Например, в некоторых вариантах воплощения изобретения две передние ножки 104а (например, "приводные" ножки) и, по меньшей мере, одна из задних ножек 104c, по меньшей мере, немного длиннее других ножек. Такая конфигурация позволяет повысить скорость, увеличивая движущую силу вперед приводных ножек. В целом, остальные ножки 104 способствуют предотвращению опрокидывания устройства 100, обеспечивая дополнительную упругость устройства 100, когда оно начинает наклоняться в одну или другую сторону.
[0085] В некоторых вариантах воплощения изобретения одна или более из «ножек» может включать любую часть устройства, которая касается земли. Например, устройство 100 может включать в себя одну заднюю ножку (или несколько задних ножки), изготовленную из относительно негибкого материала (например, из жесткой пластмассы), которые могут напоминать передние ножки или могут образовывать опорную пластину, предназначенную для простого перемещения в качестве передней ножки 104а, обеспечивая движущую силу вперед. Колебание эксцентричной нагрузки может повторяться от нескольких десятков до нескольких сотен раз в секунду, что приводит к перемещению устройства 100, в целом, вперед в результате прямого импульса, генерируемого при отрицательном Fv.
[0086] Геометрия ножки может быть определена и воплощена на основе соотношений различных измерений ножки, в том числе длины ножки, диаметра, и радиуса кривизны. Одним соотношением, которое может быть использовано, является отношение радиуса кривизны ножки 104 к длине ножки. Например, если радиус кривизны ножки равен 49.14 мм и длина ножки равна 10.276 мм, то такое отношение равно 4,78. В другом примере, если радиус кривизны ножки составляет 2,0 дюйма, а длина ножки является 0,4 дюйма, то такое отношение равно 5,0. Для получения отношения радиуса кривизны к длине ножки, могут использоваться и другие ножки 104, что приводит к подходящему перемещению устройства 100. В целом, отношение радиуса кривизны к длине ножки может находиться в пределах от 2,5 до 20,0. Радиус кривизны может примерно составлять расстояние от основания ножки до верхушек ножки. Тем не менее, такая кривизна может включать в себя несколько вариантов. Например, некоторые углы конусности в ножках могут быть необходимыми в процессе изготовления устройства (например, чтобы легче вынимать их из пресс-формы). Такой угол конусности может привести к небольшим изменениям в общей кривизне, что, как правило, не мешают радиусу кривизны соответствовать расстоянию от основания ножки до верхушки ножки.
[0087] Другое соотношение, которое может использоваться для характеристики устройства 100, представляет собой отношение длины ножки 104 к диаметру ножки или толщине (например, измеряется в центре ножки или учитывается средний диаметр ножки по всей длине ножки и/или окружности ножки). Например, длина ножки 104 может находиться в пределах от 0,2 дюйма до 0,8 дюйма (например, 0,405 дюйма), и может быть пропорционально (например, в 5,25 раза) толщине ножки в пределах от 0,03 до 0,15 дюйма (например, 0,077 дюйма). Другими словами, ножки 104 могут составлять приблизительно от 15% до 25% толщины от их дины, хотя могут использоваться и большие или меньшие толщины (например, в пределах от 5% до 60% от длины ножки). Длина и толщина ножки 104 может дополнительно зависеть от общего размера устройства 100. В общем, по меньшей мере, одна приводная ножка может иметь отношение длины ножки к диаметру ножки в пределах от 2,0 до 20,0 (т.е. в пределах от 5% до 50% от длины ножки). В некоторых вариантах воплощения изобретения диаметр составляет, по меньшей мере, 10% от длины ножки, что может обеспечить достаточную жесткость для удержания веса устройства и/или для обеспечения желаемых характеристик движения.
Материал, из которого изготовляются ножки
[0088] В основном ножки изготавливаются из резины или другого гибкого, но упругого материала (например, полистирол-бутадиен-стирол с твердостью около 65 по шкале Шора, или в пределах от 55-75 по шкале Шора). Таким образом, ножки, как правило, отклоняются, если к ним прикладывается сила. Обычно ножки имеют достаточную жесткость и упругость, чтобы облегчить последовательное движение вперед, как только устройство начинает вибрировать (например, как только начинает вращаться эксцентричная нагрузка 210). Ножки 104 также достаточно жесткие, чтобы поддерживать относительно широкую позицию, когда устройство 100 находится в вертикальном положении, но обеспечить достаточное боковое отклонение, когда устройство 100 находится на боку, чтобы облегчить самоспрямление, как будет дополнительно описано ниже.
[0089] Выбор материалов для ножки может повлиять на движение устройства 100. Например, тип используемого материала и степень его устойчивости может повлиять на количество подпрыгиваний ножки 104, обусловленных вибрацией двигателя 202 и противовеса 210. В результате, в зависимости от жесткости материала (среди прочего, положение верхушки ножки 106b относительно основания ножки 106а), скорость работы устройства 100 может измениться. В общем, использование более жестких материалов для ножки 104 может привести к более интенсивному скачку, в то время как более гибкие материалы могут поглощать часть энергии, вызванной вибрацией двигателя 202, что, как правило, уменьшает скорость устройства 100.
Характеристики трения
[0090] Сила трения (или сопротивления) равна коэффициенту трения, умноженному на вертикально направленную силу. Различные коэффициенты трения и результирующие силы трения могут использоваться для различных ножек. Например, для управления скоростью и направлением (например, тенденции к повороту и т.д.), верхушки ножки 106а могут иметь различные коэффициенты трения (например, с использованием различных материалов) или силы сопротивления (например, путем изменения коэффициентов трения и/или средней вертикально направленной силы для конкретной ножки). Эти различия могут быть проявлены, например, в форме (например, заостренности или плоскостности и т.д.) верхушек ножки 106а, а также в материале, из которого они изготовлены. Передние ножки 104а, например, могут иметь более высокое трение, чем задние ножки 104с. Срединные ножки 104b могут иметь другое трение или могут быть настроены таким образом, чтобы быть короче и не соприкасаться поверхностью 110, и, таким образом, как правило, не влиять на общее сопротивление. В связи с тем, что задние ножки 104с (и срединные ножки 104b в той степени, в которой они касаются земли), как правило, больше волочатся, чем создают движущую силу вперед, более низкие коэффициенты трения и более низкие силы сопротивления для этих участков могут помочь увеличить скорость устройства 100. Кроме того, для компенсации мощности двигателя 215, который может смещать устройство влево или вправо, левые и правые ножки 104 могут иметь разные силы трения. В целом, коэффициенты трения и результирующие силы трения всех ножек 104 могут влиять на общую скорость устройства 100. Количество ножек 104 в устройстве 100 также может использоваться для определения коэффициента трения, который необходим для каждой отдельной ножки 104. Как обсуждалось выше, срединные ножки 104b не обязательно должны касаться поверхности 110. Например, срединные (или передние, или задние) ножки 104 могут быть встроены в устройство 100 по эстетическим причинам, например, чтобы устройство 100 выглядело более правдоподобно и/или для повышения его стабильности. В некоторых вариантах воплощения изобретения устройство 100 может быть выполнено таким образом, чтобы только три (или небольшое количество) ножки 104 касались земли, например, две передние ножки 104а и одна или две задние ножки 104с.
[0091] Двигатель 202 крепится к и вращает противовес 210 или эксцентрическую нагрузку, который имеет ЦТ, отклоненный от оси относительно оси вращающегося двигателя 202. Вращающийся двигатель 202 и противовес 210, в дополнение к тому, что приводят в движение устройство 100, также могут вызвать прокатку устройства 100, например, относительно оси вращения вращающегося двигателя 200. Ось вращения двигателя 202 может иметь ось, приблизительно совпадающую с продольным ЦТ устройства 100, которая также в основном совпадает с направлением движения устройства 100.
[0092] На фиг. 2А также отображена батарея 220 и переключатель 222. Батарея 220 может обеспечивать питание для двигателя 202, например, когда переключатель 222 установлен в положение "ВКЛ.", таким образом соединяя электрическую цепь, которая подает электрический ток к двигателю 202. В положении переключателя 222 "ВЫКЛ.", цепь прерывается, и питание не подается двигателю 202. Батарея 220 может располагаться в или над крышкой батарейного отсека 224, доступной, например, путем удаления винтов 226, как показано на фиг. 2А и 3В. Размещение батареи 220 и переключателя 222 частично между ножками устройства 100 может снизить ЦТ устройства и помогает предотвратить опрокидывание. Расположение двигателя 202 ниже в устройстве 100 также уменьшает возможность опрокидывания. Ножки 104 по бокам устройства 100 обеспечивают пространство (например, между ножками 104) для размещения батареи 220, двигателя 204 и переключателя 222. Расположение данных компонентов 204, 220 и 222 вдоль нижней части устройства 100 (например, а не на верхней части корпуса устройства) эффективно снижает ЦТ устройства 100 и уменьшает вероятность его опрокидывания.
[0093] Устройство 100 может быть выполнено таким образом, что ЦТ выборочно расположен, чтобы влиять на поведение устройства 100. Например, более низкий ЦТ может помочь предотвратить опрокидывание устройства 100 в процессе его эксплуатации. В одном примере, опрокидывание может произойти в результате того, что устройство 100, движется с высокой скоростью и наталкивается на препятствие. В другом примере, опрокидывание может произойти, если устройство 100 наталкивается на достаточно неправильную площадь поверхности, по которой оно перемещается. ЦТ устройства 100 можно выборочно манипулировать путем установки двигателя, переключателя и батареи в местах, которые обеспечивают желаемый ЦТ, например, тот, который снижает вероятность случайного опрокидывания. В некоторых вариантах воплощения изобретения ножки могут быть выполнены таким образом, чтобы проходить от верхушки ножки 106а ниже ЦТ к основанию ножки 106b выше ЦТ, что делает устройство 100 более стабильным в процессе его эксплуатации. Компоненты устройства 100 (например, двигатель, переключатель, батареи, и корпус) могут располагаться, по меньшей мере, частично между ножками, чтобы поддерживать более низкий ЦТ. В некоторых вариантах воплощения изобретения компоненты устройства (например, двигатель, переключатель и батарея) могут располагаться близко к ЦТ, чтобы увеличить силы до максимального уровня, вызванные двигателем 202 и противовесом 210.
Самовосстановление
[0094] Самовосстановление или способность вернуться в вертикальное положение (например, на ножках 104), является еще одной особенностью устройства 100. Например, устройство 100 иногда опрокидывается или падает (например, падение со стола или ступеньки). В результате чего устройство 100 может перевернуться на верхнюю часть или на бок. В некоторых вариантах воплощения изобретения самовосстановление может быть достигнуто с помощью силы, вызванной двигателем 202 и противовесом 210, что позволяет устройству 100 вновь встать на ножки 104. Данный результат можно достигнуть за счет расположения ЦТ рядом с осью вращения двигателя, что повысит способность всего устройства 100 к перемещению. Такое самовосстановление, как правило, предусматривает перемещение в направлении, противоположном вращению двигателя 202 и противовесу 210.
[0095] При условии что производится достаточный уровень прокатки, благодаря силе вращения, возникающей при вращении двигателя 202 и противовеса 210, внешняя форма устройства 100 может быть выполнена таким образом, что перемещение, как правило, происходит только тогда, когда устройство 100 находится на правом боку, верхней стороне, или левой стороне. Например, поперечное расстояние между ножками 104 может быть достаточно широким, чтобы препятствовать перемещению, когда устройство 100 уже находится в вертикальном положении. Таким образом, форма и положение ножек 104 могут быть сконструированы таким образом, что в случае самовосстановления устройство 100 возвращается в вертикальное положение после опрокидывания или падения, и устройство 100 имеет тенденцию к тому, чтобы остаться в вертикальном положении. В частности, за счет поддержания плоской и относительно широкой стойки в вертикальном положении, повышается способность сохранять стабильность, и за счет внедрения характеристик, которые уменьшают плоскостность, когда устройство 100 не находится в вертикальном положении, способность к самовосстановлению увеличивается.
[0096] Для обеспечения прокатки с верхней части устройства 100, верхушка 120 или выступ (например, конечность 105), могут располагаться на верхней части устройства 100. Верхушка 120 или другой выступ может предотвратить устройство от опрокидывания на верхнюю часть. Кроме того, верхушка 120 или другой выступ может препятствовать тому, чтобы Fh стал параллелен силе тяжести, и в результате чего, Fh может способствовать перекатыванию устройства, позволяя устройству 100 перекатыванию в вертикальное положение или, по меньшей мере, на бок. В некоторых вариантах воплощения изобретения верхушка 120 или другой выступ может быть относительно жестким (например, выполнен из относительно жесткого пластика), в то время как верхняя поверхность головки 118 может изготавливаться из более упругого материала, который способствует подпрыгиванию. Отскок головы 118 устройства, когда устройство находится на спине, может способствовать самовосстановлению, позволяя устройству 100 перекатываться за счет сил, вызванных вращением 202 и противовесом 210, как только голова 118 отскакивает от поверхности 110.
[0097] Перекатывание устройства 100 с бока в вертикальное положение может упроститься, благодаря ножкам 104, достаточно гибким при наличии пространства 124 (например, под устройством 100) для поперечного прогиба ножки, что позволяет устройству 100 перекатываться в вертикальное положение. Это пространство позволят ножкам 104 сгибаться при перекатывании, что облегчает плавный переход от бока в нижней части. Плечи 121 на устройстве 100 могут также снижать тенденцию к перекатыванию устройства 100 катиться с бока на его спину, по меньшей мере, когда силы, вызванные двигателем 202 и противовесом 210, направлены в сторону, противоположную перекатыванию с бока на спину. С другой стороны, плечо устройства 100 (даже в той же конфигурации) может быть выполнено таким образом, чтобы препятствовать перекатыванию устройства 100 на спину, когда силы, вызванные двигателем 202 и противовесом 210, направлены в сторону перекатывания с бока на спину. Кроме того, использование упругого материала для плеча может увеличить отскок, который повышает способность к самовосстановлению (например, позволяя устройству 100 отскакивать от поверхности 110 и позволяет силам противовеса переворачивать устройство, находясь в воздухе). Самовосстановление при падении на бок дополнительно облегчается путем добавления конечностей вдоль боковой(ых) стороны устройства 100, что дополнительно отделяет ось вращения от поверхности и увеличивает силы, вызванные двигателем 202 и противовесом 210.
[0098] Положение батареи в устройстве 100 может повлиять на способность устройства перекатываться и самовосстанавливаться. Например, батарея может располагаться на боковой стороне, в плоскости, которая является одновременно параллельной направлению перемещения устройства и перпендикулярной к поверхности 110, когда устройство 100 находится в вертикальном положении. Такое расположение батареи может способствовать сокращению общей ширины устройства 100, в том числе бокового расстояния между ножками 104, что облегчает перекатывание устройства 100.
[0099] На фиг. 4 показан вид спереди в примере, указывающем центр тяжести (ЦТ) 402, как обозначено большим знаком плюс, для устройства 100. Такой вид иллюстрирует продольный ЦТ 402 (то есть расположение продольной оси устройства 100, которая проходит через ЦТ устройства). В некоторых вариантах воплощения изобретения компоненты устройства располагаются таким образом, что продольный ЦТ размещен близко к (например, в пределах от 5-10% от высоты устройства) физической продольной центральной линии устройства, которая может уменьшить вращательный момент инерции устройства, тем самым увеличивая или повышая до максимального уровня силы на устройстве, как только вращающий двигатель начинает вращать эксцентрическую нагрузку. Как упоминалось выше, данный эффект увеличивает тенденцию устройства 100 к перекатыванию, что может повысить способность устройства к самовосстановлению. На фиг. 4 также отображено пространство 404 между ножками 104 и нижней частью 122 устройства 100 (в том числе батарейный отсек 224), который позволяет ножкам 104 сгибаться вовнутрь, когда устройство находится на боку, тем самым облегчая самовосстановление устройства 100. На фиг. 4 также отображено расстояние 406 между парами или рядами ножек 104. Увеличение расстояния 406 может помочь предотвратить переворачивание устройства 100. Тем не менее, достаточно небольшое расстояние 406 в сочетании с гибкостью ножек 104, может улучшить способность устройства к самовосстановлению сразу после опрокидывания. В общем, для предотвращения перевертывания, расстояние 406 между парами ножек должно быть увеличено пропорционально увеличению ЦТ 402.
[0100] На фиг. 4 отображена верхушка 120 устройства, хотя верхушка 120 обычно имеет ограниченное влияние в присутствии верхней конечности 105. Размер или высота верхушки 120 (при отсутствии верхней конечности 105) или в верхней конечности 105 может быть в достаточно большой, чтобы предотвратить устройство 100 от переворота на спину после опрокидывания, но достаточно маленькой, чтобы облегчить переворот устройства и заставить устройство 100 перевернуться обратно после опрокидывания. Более высокая верхушка 120 может иногда объединяться с "грудными плавниками" или другими конечностями для увеличения "округлости" устройства.
[0101] Тенденция устройства 100 к перекатыванию может зависеть от общей формы устройства 100, например, устройство 100, имеющее, как правило, цилиндрическую форму, в частности, в верхней части устройства 100, может перекатиться относительно легко. Тем не менее, перекатывание также может произойти, когда устройство 100 включает в себя верхнюю конечность 105, по крайней мере, если устройство 100 может отскакивать или иным образом подпрыгивать достаточно высоко от поверхности, чтобы перекатиться с одной стороны верхней конечности 105 в другую сторону. Таким образом, даже если верхняя часть устройства не является круглой, как показано на фиг. 4, которое включает в себя прямые верхние стороны 407а и 407b, геометрия верхней части устройства 100 все равно может облегчить перекатывание. Перекатывание возможно, если расстояния 408 и 410 относительно равны, и каждое примерно определяет радиус, по существу, цилиндрической формы устройства 100. Расстояние 408, например, представляет собой расстояние от продольного ЦТ 402 устройства до верхней части плеча 112. Расстояние 410 представляет собой расстояние от продольного ЦТ 402 устройства до верхушки 120. Также длина поверхности 407b (то есть расстояние между верхней части плеча 112 и верхушкой 120) меньшая, чем расстояния 408 и 410, может также увеличивать тенденцию устройства 100 к перекатыванию. Более того, если продольный ЦТ 402 устройства расположен относительно близко к центру цилиндра, к которому приближается общая форма устройства 100, то способность к перекатыванию устройства 100 увеличивается, так как силы, вызванные двигателем 202 и противовесом 210, как правило, располагаются ближе в центре. Устройство 100 может остановить перекатывание после того, как устройство 100 встает на ножки 104, которые обеспечивают широкую позицию и служат окончанием цилиндрической формы устройства 100.
[0102] На Фиг. 5 показан вид сбоку примера, указывающий центр тяжести (ЦТ) 502, как обозначено большим знаком плюс, для устройства 100. Этот вид также отображает ось двигателя 504, которая, в данном примере, тесно связана с продольным компонентом ЦТ 502. Расположение ЦТ 502 зависит от, например, массы, толщины, и размещения материалов и компонентов, входящих в состав устройства 100. В некоторых вариантах воплощения изобретения ЦТ 502 может находиться еще дальше или ближе относительно его расположения на фиг. 5. Например, ЦТ 502 может располагаться ближе к заднему концу переключателя 222, а не ближе к переднему концу переключателя 222, как показано на фиг. 5. В общем, ЦТ 502 устройства 100 может находиться достаточно далеко позади передней приводной ножки 104а и вращающегося эксцентрического груза (и достаточно далеко перед задними ножками 104с), чтобы облегчает скачки в передней части и волочение ножки в задней части, что увеличивает продвижение вперед и контролирует перемещение по прямой (или, в случае необходимости, поворота) во время прыжков. Например, ЦТ 502 может располагаться примерно посередине (например, в пределах от примерно 40-60% от расстояния) между передними приводными ножками 104а и задними ножками 104с. Кроме того, совмещение оси двигателя с продольным ЦТ может увеличить силы, вызванные двигателя 202 и противовесом. В некоторых вариантах воплощения изобретения продольный компонент ЦТ 502 может располагаться близко к центру высоты устройства (например, в пределах примерно 3% ЦТ от высоты устройства). Как правило, выполнение устройства 100 таким образом, что ЦТ 502 располагается ближе к центру высоты устройства, может увеличить способность к перекатыванию, хотя и большие расстояния (например, около 5% или в пределах приблизительно 20% ЦТ от высоты устройства) являются приемлемыми в некоторых вариантах воплощения изобретения. Кроме того, выполнение устройства 100 таким образом, что ЦТ 502 находится в пределах примерно от 3-6% двигателя оси 504 от высоты устройства, может также увеличить способность к перекатыванию.
[0103] Фиг. 5 также показывает приблизительную ориентацию батареи 220, переключателя 222 и двигателя 202 с продольным компонентом ЦТ 502. Хотя механизм ползункового переключателя 506, который приводит в действие включатель/выключатель 222, висит под нижней частью устройства 100, общая приблизительная ориентировка ЦТ отдельных компонентов 220, 222 и 202 (друг с другом и с ЦТ 502 всего устройства 100) способствует возможности устройства 100 вращаться и тем самым выпрямляться. В частности, двигатель 202 центрируется, главным образом, вдоль продольного компонента ЦТ 502.
[0104] В некоторых воплощениях высшая точка 120 может располагаться за ЦТ 502, что может упростить саморегулирование в сочетании с внецентренной нагрузкой, прикрепленной к двигателю 202, который расположен около носовой части 108. В результате, если устройство 100 находится на боку или задней части, конец носовой части устройства 100 склонен к вибрированию и подпрыгиванию (больше, чем конец хвостовой части устройства 100), что облегчает саморегулирование, так как силы двигателя и внецентренной нагрузки стремятся побудить устройство к вращению.
[0105] Фиг. 5 также показывает некоторые из примерных размеров устройства 100. например, расстояние 508 между ЦТ 502 и плоскостью, проходящей через кончики ножки 106а, на которых устройство 100 покоится в вертикальном состоянии на плоской поверхности 110, может равняться приблизительно 0.36 дюйма. В некоторых воплощениях это расстояние 508 равно приблизительно 50% от общей высоты устройства (см. Фигуры 7А и 7В), хотя в разных воплощениях могут использоваться другие расстояния 508 (например, от 40% до 60%). Расстояние 510 между осью вращения 504 двигателя 202 и той же плоскостью, которая проходит через кончики ножек 106а приблизительно такое же, как и расстояние 508, хотя могут использоваться варианты (например, 0.34 дюйма для расстояния 510 против 0.36 дюйма для расстояния 508) без существенного влияния на требуемую функциональность. Большее количество вариантов (например, 0.05 дюйма или 0.1 дюйма) может использоваться в некоторых воплощениях.
[0106] Расстояние 512 между кончиком ножек 106а передних движущих ножек 104а и кончиком ножек 106а задних ножек 104c может равняться приблизительно 0.85 дюйма, хотя разные варианты могут включать другие значения расстояний 512 (например, приблизительно между 40% и 75% длины устройства 100). В некоторых воплощениях размещение передних движущих ножек 104а за внецентренной нагрузкой 210 может упростить движение от привода вперед, а также способствовать случайному характеру движений. Например, расстояние 514 между продольной средней линией внецентренной нагрузки 210 и кончиком 106а передней ножки 104а может равняться приблизительно 0.36 дюйма. Опять-таки, другие расстояния 514 могут использоваться (например, приблизительно между 5% и 30% длины устройства 100 или между 10% и 60% расстояния 512). Расстояние 516 между передней стороной устройства 100 и ЦТ 502 может равняться примерно 0.95 дюйма. В различных воплощениях расстояние 516 может колебаться примерно в пределах 40-60% длины устройства 100, хотя некоторые воплощения могут включать выступающие части передней или задней поверхностей с малой массой, которые добавляют к длине устройства, но существенно не влияют на положение ЦТ 502 (то есть таким образом понуждая ЦТ 502 находиться вне границ 40-60%).
[0107] Фиг. 9А показывает примерное окружение 900, в котором устройство 100 может функционировать, а также влезать в трубопровод 901. Трубопроводы могут быть, по существу, ровными или наклонными, или же могут сочетать наклонные и ровные участки. Трубопроводы могут позволять устройству 100 передвигаться под любым углом, включая перевернутое положение. В примере, показанном на Фиг 9А, окружение 900 включает арену 902, в которой может работать одно или более чем одно устройство 100. Арена 902 включает отверстие 904, которое ведет к соединительному проходу 906, в котором показано устройство 100. Соединительный проход 906 соединен с трубопроводом 901, к которому устройство 100 направлено на данном рисунке (например, исходя из положения головной и хвостовой частей устройства 100). Секции окружения 900, включая изогнутый проход 910 и другие секции, не показанные на Фиг. 9А, могут соединяться в точках соединения 912. например, точки соединения 912 могут включать состыкованные части (например, шпунтовые) различных секций и/или деталей окружения 900 (например, соединительный проход 906 и трубопровод 901), хотя могут использоваться другие способы соединения секций окружения 900.
[0108] Трубопровод 901 может полностью или большей частью закрыт.Например, в добавление к трубопроводу 901, имеющему поверхность пола, которая может служить поверхностью для ножки 104, может существовать поверхность потолка, которая противоположна и, по существу, параллельна поверхности пола. Поверхность пола и поверхность потолка взаимозаменяемы, так как устройство 100 может передвигаться лицевой стороной кверху или в перевернутом положении в любом трубопроводе или туннеле. Поверхность потолка, например, может быть поверхностью, которая соприкасается с верхней конечностью 105 восходящего устройства, так как устройство 100 передвигается по трубопроводу 901. Трубопровод 901 может также включать противоположные рабочие поверхности (или частичные рабочие поверхности), которые могут, в сочетании с поверхностью пола и поверхностью потолка, служить для содержания (функционирования) устройства 100 в то время как оно передвигается по трубопроводу 901. Могут использоваться другие схемы компоновки поверхностей. Подъем устройства 100 происходит в момент, когда вибрация, вызванная вибрирующим механизмом, понуждает ножки 104 и одну или более конечностей 105 неоднократно сгибаться, продвигая устройство 100 вперед (например, внутри туннеля). В то время как устройство 100 двигается вперед, ножки 104 и одна или более конечностей 105 устройства поддерживают, по существу, постоянную связь с, по существу, параллельными поверхностями (например, поверхностью пола и поверхностью потолка). Устройство 100 может потерять связь с любой поверхностью на небольшое количество времени, но движение устройством 100 обычно поддерживается в направлении вперед. В результате, устройство 100 может подниматься через любую подходящую трубу, которая имеет такой размер, что ножки 104 и одна или более конечностей 105 контактирует с поверхностями пола и потолка, чтобы вызывать движение вперед. Подъем устройства 100 может происходить под любым углом и направлением устройства 100. Например, устройство 100 может подниматься прямо вверх или вверх под любым углом. Устройство 100 может также спускаться вниз под любым углом или подниматься, по существу, горизонтально. Устройство 100 может находиться лицевой стороной кверху или в перевернутом положении и все же подниматься и опускаться. Когда устройство 100 опускается, достаточное торможение обеспечивается за счет ножки 104 и одной или более конечностей 105, чтобы обеспечить управляемый спуск.
[0109] Во время функционирования устройства 100, например, когда устройство 100 проходит по трубопроводу 901, ножки 104 и верхние конечности 105 восходящего устройства (или боковые конечности 105а и 105b) подвергаются воздействию или создают силы, которые заставляют устройство 100 подниматься. Например, силы включают результирующую силу в направлении, в общем случае определяемом смещением между основаниями конечностей и кончиками конечностей двух или более конечностей. В результате, устройство 100 поднимается, когда результирующая сила превышает противоположную ей силу тяжести, воздействующую на устройство 100. В частности, силы, приложенные ножками 104 и верхними конечностями 105 восходящего устройства (или боковыми конечностями 105а и 105b) (например, устройство 100 качается вверх и вниз и/или из стороны в сторону), обеспечивают эффект задерживания движения, давая возможность устройству 100 подниматься между, по существу, вертикальными противолежащими поверхностями (например, поверхностью пола и поверхностью потолка). Эффект задерживания движения может быть вызван сгибанием ножки 104 и скольжением вперед верхних конечностей 105 восходящего устройства (или боковых конечностей 105а и 105b), так как центр тяжести устройства 100 движется по направлению к поверхности пола (то есть поверхности, с которой соприкасаются ножки 104), а также из сгибанием верхних конечностей 105 восходящего устройства (или боковых конечностей 105а и 105b) и скольжением вперед ножки 104, так как центр тяжести устройства 100 движется по направлению к поверхности потолка (то есть поверхности, с которой соприкасаются верхние конечности 105 восходящего устройства (или боковые конечности 105а и 105b).
[0110] Фиг. 9В показывает примерное окружение 900, в котором устройство 100 поднялось внутри трубопровода 901 вблизи его верхней части. Так как никакая другая секция не прикреплена к открытому концу трубопровода 901, устройство 100 может упасть на стол или на пол, на которых располагается окружение 900. В некоторых воплощениях могут включаться другие секции окружения 900, например, чтобы обеспечить непрерывность действия для устройства 100 после того, как оно поднялось по трубопроводу 901.
[0111] В некоторых воплощениях скорость устройства 100 может контролироваться или, по меньшей мере, подвергаться влиянию наклона трубопровода 901 или материалов, из которых он изготовлен. В некоторых воплощениях промежуток между каждой поверхностью (например, поверхность потолка) и соответствующей(-ими) конечностью(-ями) (например, верхняя конечность 105 восходящего устройства) также может оказывать влияние на скорость устройства 100. Например, самая высокая скорость устройства 100 может достигаться, когда промежуток предоставляет какое-то количество места для маневра устройству 100, что обычно минимизирует силы, направленные назад, которые вызваны торможением, относительно сил, направленных вперед, и вызванных вибрацией, например, активируя результативный эффект задерживания движения (и, таким образом, более быстрый уровень поднятия). В некоторых воплощениях могут использоваться другие промежутки для других секций трубопровода 901, имеющего другие наклоны или другие пределы изгибов. Например, промежутки могут подбираться таким образом, чтобы соответствовать наклону.
[0112] Фиг. 9С показывает пример петлеобразного трубопровода 950 в форме двойной петли. Например, устройство 100 может войти в петлеобразный трубопровод 950 через вход 952. При перемещении по петлеобразному трубопроводу 950 устройство 100 может сделать две петли в 360 градусов до того, как выйти через выводной конец 954 петлеобразного трубопровода 950. В некоторых воплощениях устройство 100 может подвергаться вращению или перемещаться по петлеобразному трубопроводу 950 спиралевидным образом. Например, по существу параллельные поверхности потолка и пола могут искривляться, чтобы заставить устройство 100 вращаться, пока оно перемещается вдоль параллельных поверхностей. В качестве альтернативы, пазы (или другие изменения в форме), вмонтированные во внутреннюю часть петлеобразного трубопровода 950, могут оказывать воздействие на спиралевидное движение (например, путем направления верхних конечностей 105 восходящего устройства или боковых конечностей 105а и 105b через изгибы).
[0113] В некоторых воплощениях две или более конечности могут прикрепляться ко внутренней части трубопровода (например, «конечности трубопровода») и соприкасаться с телом устройства 100. Например, трубопровод 901 может включать, в пределах поверхностей внутренней части (например, на поверхности потолка), множественные концы трубопровода, как показано на Фиг. 9D. В некоторых воплощениях кончики концов трубопровода могут соприкасаться с верхним краем устройства 100 во время его движения по трубопроводу 901. Например, концы трубопровода могут располагаться таким образом, что кончики находятся в прямом направлении относительно оснований концов. В некоторых воплощениях концы трубопровода могут устанавливаться с определенным промежутком, например, по существу, через равные интервалы таким образом, чтобы, по меньшей мере, один конец все время граничил бы с верхним краем устройства 100 и таким образом мог соприкасаться с устройством 100 во время вибраций устройства. Следовательно, концы трубопровода адаптируются, чтобы позволить устройству 100 подниматься по вертикальному трубопроводу (например, трубопровод 901). В некоторых воплощениях ряды концов трубопровода могут применяться, например, для соприкосновения с верхней частью устройства 100 в различных положениях сбоку. Упругость концов трубопровода может отличаться от упругости конечностей на самом устройстве 100.
[0114] В некоторых воплощениях две или более конечностей восходящего устройства могут прикрепляться к устройству 100. Например, трубопровод (901), тело устройства и две или более конечностей восходящего устройства могут компоноваться таким образом, чтобы каждое из двух или более конечностей восходящего устройства повторно соприкасались бы с внутренней поверхностью трубопровода в случае, если соприкосновение длится достаточный период времени, чтобы осуществлять в основном движение вперед. В некоторых воплощениях, по меньшей мере, одна из двух или более конечностей восходящего устройства, по существу, находится в постоянном контакте с внутренней поверхностью трубопровода. Например, когда конечности восходящего устройства включают в себя одну или более конечностей 105 восходящего устройства, внутренней поверхностью трубопровода 901, с которой они соприкасаются, является поверхность потолка. В другом примере, когда конечности восходящего устройства включают одну или более боковых конечностей 105а и 105b, соприкасающиеся внутренние поверхности трубопровода 901 могут включать боковые поверхности.
[0115] Когда две или более конечностей (например, конечности восходящего устройства) прикреплены к устройству 100, вибрация устройства 100 понуждает, по меньшей мере, одну из двух или более конечностей восходящего устройства менять направление на противоположное направлению вперед (то есть так как вибрация понуждает устройство 100 двигаться по направлению к поверхности, с которой соприкасается отдельная конечность восходящего устройства). Например, отклонение происходит без значительного скольжения, по меньшей мере, одной конечности по соответствующей внутренней поверхности (например, поверхность потолка), когда результирующие силы, воздействующие, по меньшей мере, на одну конечность, направлены на соответствующую внутреннюю поверхность (например, на поверхность потолка). В то же время упругость, по меньшей мере, одной конечности, заставляет, по меньшей мере, одну конечность восходящего устройства изменять направление на направление вперед, когда результирующие силы, воздействующие, по меньшей мере, на одну конечность, направлены от соответствующей внутренней поверхности (например, на поверхность потолка). Устройство 100 может быть сконфигурировано таким образом, что отклонение вперед, как правило, производит усилие на себя, недостаточное для преодоления усилий от себя, создаваемой одной или более конечностями на противоположной стороне устройства 100.
[0116] В некоторых воплощениях могут использоваться дополнительные или альтернативные конечности. Фигуры 15А-15D показывают альтернативное воплощение вибрационного механизированного устройства 1500. Фиг. 15В - вид сверху альтернативного вибрационного механизированного устройства 1500. Фиг. 15С - вид спереди альтернативного вибрационного механизированного устройства 1500. Фиг. 15D - вид сбоку альтернативного вибрационного механизированного устройства 1500 в то время, когда оно движется по примерному изогнутому вверх трубопроводу 1520. Фигуры 15А-15С включают приблизительные размеры (например, в миллиметрах), чтобы показать пример относительных размеров деталей. Устройство 1500 включает в себя конечности 1505, 1510 и 1515. В воплощении, показанном на Фигурах 15А-15D, устройство 1500 включает удвоенные основные верхние конечности 1505а и 1505b, хотя только лишь одна основная верхняя конечность 1505 может использоваться (например, подобно верхней конечности 105 восходящего устройства, расположенной на передней части устройства 100, как показано на Фиг. 7В). Устройство 1500 включает в себя вторичную верхнюю конечность 1510, которая располагается за основными конечностями 1505а и 1505b. Вторичная верхняя конечность 1510 восходящего устройства способствует поддержанию движения вперед. В некоторых воплощениях вторичная верхняя конечность 1510 может контактировать с верхней внутренней поверхностью 1530 изогнутого трубопровода 1520 только (или может только содействовать движению вперед) при прохождении тесных поворотов. Основные верхние конечности 1505а и 1505b восходящего устройства расположены на передней части устройства 1500 в месте, которое существенно смещено к передней части 1500 от средней точки между первыми и последними ножки 104. При прохождении тесного восходящего поворота средняя точка между передними и задними ножками 104 имеет склонность к выравниванию с центром восходящего поворота. По этой причине, основные верхние конечности 1505а и 1505b могут потерять контакт с верхней внутренней поверхностью 1530, если радиус поворота достаточно сжат.Кончик вторичной верхней конечности 1510 может располагаться рядом с центральной линией между передними и задними ножками 104 и, таким образом, сохранять непрерывный или, по существу, непрерывный контакт с верхней внутренней поверхностью 1530 и помогать в поддержании движения вперед. Дополнительные вторичные передние ножки 1515, которые могут соприкасаться только с нижней внутренней поверхностью 1525 трубопровода 1520 на относительно тесных восходящих изгибах, также могут способствовать движению вперед.
Хаотическое движение
[0117] Путем введения функций, которые повышают хаотичность движения устройства 100, устройство 100 может вести себя как живое ползающее насекомое или другая органическая форма жизни. Хаотическое движение может включать несообразные движения чем, например, движения, производимые по прямым линиям или непрерывным окружностям. Следовательно, устройство 100 может бродить вокруг своей среды (например, непредсказуемым или извилистым образом) вместо движения по предсказуемым схемам. Хаотическое движение может происходить, например, даже во время движения устройства 100 в одном главном направлении.
[0118] В некоторых воплощениях хаотичность может достигаться изменением упругости ножки 104, материала, используемого для изготовления ножки 104 и/или регулировкой внутренней нагрузки на различные ножки 104. Например, так как упругость ножки понижается, количество скачков устройства понижается, таким образом, снижая возникновение хаотического движения. Когда ножки 104 относительно упруги, ножки 104 склонны вызывать скачки, и устройство 100 может осуществлять непредсказуемое и хаотическое движение.
[0119] Наряду с тем что материал, выбираемый для ножки 104, может влиять на их упругость, он также может оказывать другое воздействие. Например, на материал ножки можно воздействовать для привлечения пыли и осколков на или около кончиков ножки 106а, где ножки 104 соприкасаются с поверхностью 110. Эти пыль и осколки могут приводить к хаотическому повороту устройства 100 и изменению его схемы движения. Это может случаться из-за того, что пыль и осколки могут менять типичные фрикционные характеристики ножки 104.
[0120] Внутренняя нагрузка на каждую ножку 104 также может влиять на хаотичность движения устройства 100. В качестве примера, в то время как увеличивается внутренняя нагрузка на отдельную ножку 104, часть устройства 100 может подпрыгивать на более высокую амплитуду, заставляя устройство 100 приземляться в разных местах.
[0121] В некоторых воплощениях во время подпрыгивания и пока, по меньшей мере, некоторые ножки 104 устройства 100 находятся в воздухе (или, по меньшей мере, прилагают меньше сил к поверхности 110), двигатель 202 и противовес 210 могут вызвать некоторый уровень поворота в воздухе и/или вращения устройства 100. Это может обеспечить результат приземления или подпрыгивания устройства непредсказуемым образом, что может далее привести к хаотичности движения.
[0122] В некоторых воплощениях дополнительное хаотическое движение может происходить из расположения передних приводных ножек 104а (то есть ножек, которые главным образом двигают устройство 100 вперед) за противовесом двигателя. Это может вызвать тенденцию движения передней части устройства 100 в менее прямом направлении, так как противовес находится дальше от ножек 104, и что в противном случае, поглощало бы и контролировало бы энергию. Примерное боковое расстояние от центра противовеса до кончика первой ножки в 0.36 дюйма сравнимо с примерной длиной ножки в 0.40 дюйма. В основном, расстояние 514 от продольной центральной линии противовеса до кончика 106а передней ножки 104а может быть приблизительно таким же, как и длина ножки, но расстояние 514 может меняться в пределах 50-150% длины ножки.
[0123] В некоторых воплощениях дополнительные конечности могут добавляться к ножкам 104 (и к корпусу 102), чтобы обеспечить резонанс. Например, гибкие выступающие части, которые постоянно в движении, могут таким образом способствовать общей хаотичности движения устройства 100 и/или естественному внешнему виду устройства 100. Применение конечностей разных размеров и гибкости может увеличить эффект.
[0124] В некоторых воплощениях батарея 220 может располагаться около задней части устройства 100, чтобы увеличить подпрыгивание. Выполнение этого размещает вес батареи 220 над самыми последними ножками 104, уменьшая нагрузку на передние ножки 104а, что может сделать возможным большее подпрыгивание на передних ножках 104а. В общем, батарея 220 может иметь тенденцию быть тяжелее, чем переключатель 222 и двигатель 202, таким образом, расположение батареи 220 рядом с задней поверхностью устройства 100 может поднимать носовую часть 108, позволяя устройству 100 двигаться быстрее.
[0125] В некоторых воплощениях включатель/выключатель 222 может быть ориентирован вдоль нижней части устройства 100 между батареей 220 и двигателем 204 таким образом, чтобы переключатель 222 мог передвигаться назад и вперед сбоку. Такая конфигурация, например, помогает упростить уменьшение общей длины устройства 100. Наличие более короткого устройства может усилить тенденцию к хаотическому движению.
Скорость движения
[0126] В добавление к хаотическому движению скорость устройства 100 может способствовать естественному внешнему виду устройства 100. Факторы, влияющие на скорость, включают частоту вибрации и амплитуду, производимые двигателем 202 и противовесом 210, материалы для изготовления ножки 104, длину ножки и свойства отклонения, различия в конфигурации ножек и в количестве ножек.
[0127] Частота вибрации (например, на основе скорости вращения двигателя) и скорость устройства обычно прямо пропорциональны. То есть когда частота колебаний двигателя 202 вырастает, а все факторы поддерживаются постоянными, устройство 100 будет стремиться к более быстрому движению. Примерная частота колебаний двигателя находится в промежутке от 7000 до 9000 оборотов в минуту.
[0128] Материал ножек имеет несколько свойств, которые способствуют скорости. Фрикционные свойства материала ножки влияют на величину силы сопротивления устройства. Так как коэффициент трения ножки возрастает, общее сопротивление устройства будет увеличиваться, заставляя устройство 100 замедляться. По существу, использование материала, имеющего свойства, способствующие малому трению, может увеличить скорость устройства 100. В некоторых воплощениях для ножек 104 могут применяться полистирол-бутадиен-стирол с показателем твердомера около 65 (например, на основе шкалы Шора А). Свойства материала ножек также способствуют упругости ножки, которая, в сочетании с толщиной и длиной ножки, определяет, какое подпрыгивание разовьет устройство 100. Так как общая упругость ножек возрастает, возрастает и скорость устройства. Более длинные и тонкие ножки снижают упругость ножки, таким образом, замедляя скорость устройства.
Появление интеллекта
[0129] «Умный» ответ преградам - еще одно свойство устройства 100. Например, «интеллект» может предупредить бесполезное давление устройства 100 на неподвижный объект (например, стену), с которым оно вошло в контакт.«Интеллект» может быть выполнен лишь с использованием механических проектных соображений, с помощью чего можно избежать необходимости добавления, например, электронных датчиков. Например, к поворотам (например, левому или правому) можно прийти с использованием носовой части 108, которая выполняет отклонение или скачок, в котором устройство 100, сталкивающееся с преградой, немедленно поворачивает к случайному ближнему углу.
[0130] В некоторых воплощениях добавление «скачка» к устройству 100 может быть завершено посредством вопросов разработки носовой части и ножки 104, а задания также скорости устройства 100. Например, носовая часть 108 может включать свойство, аналогичное пружине. В некоторых воплощениях носовая часть 108 может изготавливаться с применением резины, пластмассы или других материалов (например, полистирол-бутадиен-стирола с твердостью около 65 или в пределах 55-75, на основе шкалы Шора А). Носовая часть 108 может иметь заостренную гибкую форму, которая под давлением сгибается внутрь. Конструкция и конфигурация ножки 104 допускает низкое поворотное сопротивление во время скачка носовой части. Скачок, выполненный носовой частью, может увеличиваться, например, когда устройство 100 имеет более высокую скорость и импульс.
[0131] В некоторых воплощениях упругость носовой части 108 может иметь дополнительное преимущество ослабления падения, в случае, если устройство 100 падает с поверхности 110 (например, стол) и приземляется на носовую часть 108.
Альтернативные формы ножки и конечностей
[0132] Фиг. 6 показывает примерное устройство 100, которое включает пару боковых конечностей 105а и 105b. Например, боковые конечности 105а и 105b могут быть схожими с верхней конечностью 105 устройства, показанным на Фиг. 1, а также могут выполнять схожие функции, то есть предоставлять возможность устройству 100 подниматься. В особенности, две или более боковых конечностей (например, боковые конечности 105а и 105b восходящего устройства) могут работать друг с другом и/или с ножками 104, чтобы дать возможность устройству 100 подниматься между, по существу, наклонными или вертикальными поверхностями (например, наклон в 45 градусов или больше), как например, поверхности внутри трубопровода или тоннеля. Например, вертикальные поверхности могут располагаться с определенным промежутком таким образом, что кончики боковых конечностей 105а и 105b и/или кончики конечностей ножек 104 прилагают знакопеременные силы на, по существу, противоположные поверхности, с которыми контактируют боковые конечности 105а и 105b и/или ножки 104.
[0133] В некоторых воплощениях боковые конечности 105а и 105b могут иметь восходящий уклон (например, вверх и в сторону от корпуса 102), как показано на Фиг. 6. В качестве примера, восходящий уклон может позволить устройству 100 и его конечностям приспосабливаться к некоторым формам трубопровода, например, включая поперечную форму тоннеля трубопровода, или если поперечная форма (например, U-образная или другая непрямоугольная форма) не полностью вертикальна. Например, восходящий уклон (в противоположность боковым конечностям 105а и 105b восходящего устройства, которые проходят прямо, параллельно поверхности) может помочь удержать устройство 100 от опрокидывания относительно задней части или на нее. Более того, восходящий уклон может предоставить, по меньшей мере, некоторые силы, противодействующие силам, вырабатываемым ножками 104, соприкасающимися с поверхностью.
[0134] Другими словами, если трубопровод имеет, по существу, круглую или овальную секцию, то ножки 104 устройства могут соприкасаться с внутренней поверхностью трубопровода, центрированной между положениями 7 часов и 5 часов по циферблату, а боковые конечности 105а и 105b восходящего устройства где-то выше положений 9 часов и 3 часов по циферблату. В то время как при использовании только верхней конечности 105 восходящего устройства, это может быть, по существу, положение 12 часов по циферблату. В некоторых воплощениях, однако, боковые конечности 105а и 105b устройства могут быть, по существу, противоположны, например, в положениях 9 часов и 3 часов по циферблату.
[0135] Во время вибрации устройства 100 кончики ножки 104 могут прилагать силы к (не обязательно горизонтальной) поверхности (например, относительно кончиков конечностей ножки 104). В особенности, кончики конечностей, созданных из материала, имеющего коэффициент трения для обеспечения достаточного захвата во время сжатия и достаточное подпрыгивание для обеспечения возвращения в нейтральное положение, могут работать для продвижения устройства 100 в направлении вперед (например, поднятия по уклону внутри трубопровода). В то же время кончики боковых конечностей могут соприкасаться с поверхностями, которые, по существу, перпендикулярны кончикам конечностей. Подобным образом продвижение вперед, облегченное подходящим коэффициентом трения кончиков боковых конечностей 1505а и 1505b устройства может далее продвигать устройство 100 в направлении вперед (например, подниматься по уклону внутри трубопровода). Различные поверхности, с которыми соприкасаются противоположные кончики конечностей, могут быть, по существу параллельными друг другу, например, внутренние стенки трубопровода, по которому может подниматься устройство 100.
[0136] В некоторых воплощениях пазы и/или ребра, вмонтированные во внутреннюю часть трубопровода, могут выравниваться с кончиками боковых конечностей 1505а и 1505b восходящего устройства, например, помогая поддерживать устройство 100 в положении относительно трубопровода. В некоторых воплощениях спиральные схемы могут использоваться в трубопроводах, чтобы устройство 100, которое входит в трубопровод на одном уровне, могло повернуться на полные 180 градусов, чтобы перевернуть устройство 100 на ножки, когда оно достигает другого уровня. Например, поверхность внутри трубопровода, с которой соприкасаются кончики конечностей ножки 104, может иметь легкое скручивание (например, скручивание в 90 градусов для каждой дуги трубопровода в 90 градусов) и, по существу, параллельные легкие скручивания могут иметь место для пазов и/или ребер (или поверхностей), с которыми соприкасаются кончики боковых конечностей 1505а и 1505b.
[0137] В некоторых воплощениях устройство 100 может иметь альтернативные конфигурации ножки. Например, ножки 104 могут соединяться с помощью перегородок, которые могут служить для увеличения упругости ножек 104 наряду с поддержанием ножек 104, которые становятся длинными. В некоторых воплощениях срединные ножки 104b могут не касаться земли, что упрощает настройку ножек на работу, не принимая в расчет неиспользуемые ножки. В некоторых воплощениях устройства 104 могут включать дополнительные конечности, которые могут обеспечить дополнительный жизнеподобный внешний вид. В некоторых воплощениях дополнительные жизнеподобные конечности могут резонировать, в то время как устройства 100 двигаются, а регулировка конечностей для создания желаемого резонанса может служить для повышения хаотичности движения. Дополнительные конфигурации ножки могут обеспечить пониженную упругость, которая может уменьшить подпрыгивание среди других характеристик.
[0138] В некоторых воплощениях устройство 100 может включать регулируемые свойства, такие как регулируемые ножки 104. Например, если потребитель покупает набор устройств 100, которые все имеют один вид (например, муравья), потребитель может захотеть, чтобы некоторые из всех устройств 100 передвигались разными способами. В некоторых воплощениях потребитель может удлинить или укоротить отдельную ножку 104 посредством первого ослабления шурупа (или зажима), который удерживает ножку 104 на месте. Затем потребитель может сдвинуть ножку 104 вверх или вниз и снова закрепить шуруп (или зажим). Например, шурупы можно ослабить для переставления ножки 104, а затем закреплять снова, когда ножки находятся в желаемом месте.
[0139] В некоторых воплощениях шурупоподобные нарезные концы на основаниях ножки 106b, наряду с соответствующими нарезными отверстиями в корпусе устройства 102, могут обеспечивать регулируемый механизм для того, чтобы удлинять или укорачивать ножки 104. Например, с помощью поворота передних ножек 104а для изменения вертикального положения оснований ножек 106b (то есть тем же способом, как и поворачивание шурупа в нарезном отверстии меняет положение шурупа), потребитель может изменить длину передних ножек 104а, таким образом меняя поведение устройства 100.
[0140] В некоторых воплощениях кончики оснований ножек 106b регулируемых ножек 104 могут монтироваться в отверстия в корпусе 102 устройства 100. Материал (например, резина), из которого сделаны ножки, наряду с размером и материалом отверстий в корпусе 102, может обеспечить достаточное трение для удерживания ножек 104 на месте, все еще позволяя вставлять или вытаскивать ножки через отверстия в новых установленных положениях.
[0141] В некоторых воплощениях, в добавление к использованию регулируемых ножек 104, могут достигаться изменения в движении путем небольшого изменения центра тяжести, которое может служить для изменения эффекта вибрации двигателя 202. Это может иметь эффект понуждения устройства двигаться медленнее или быстрее, так же, как и изменение склонности устройства к поворотам. Предоставление потребителю регулировочных средств может дать возможность разным устройствам 100 двигаться по-разному.
Размеры устройства.
[0142] Фигуры 7А и 7В показывают примерные размеры устройства 100. Например, длина 702 равна приблизительно 1.73 дюйма, ширина 704, от кончика ножки до кончика ножки, равна приблизительно 0.5 дюйма, а высота 706 равна приблизительно 0.681 дюйма. Длина ножки 708 может равняться приблизительно 0.4 дюйма, диаметр ножки может составлять примерно 0.077 дюйма. Радиус изгиба (отображенный, в основном, на позиции 712) может равняться приблизительно 1.94 дюйма. Также могут использоваться другие размеры. В основном, длина устройства 702 может находиться в пределах от двух до пяти ширин 702, а высота 706 может находиться примерно в пределах от одной до двух ширин 704. Длина ножки 708 может находиться в пределах от трех до десяти диаметров ножки 710. Нет физических ограничений для общего размера, до которого устройство 100 можно масштабировать, при условии надлежащего регулирования сил двигателя и противовеса. В основном, целесообразно использовать размеры, по существу, пропорциональные тем, которые изображены. Подобные пропорции могут предоставлять различные преимущества, включая улучшение способности устройства 100 к выпрямлению после опрокидывания и упрощение желаемых характеристик движения (например, тенденции к перемещению по прямой линии и т.д.)
Материалы конструкций
[0143] Выбор материала для ножки основывается на нескольких факторах, влияющих на выполнение. Главными параметрами материалов являются коэффициенты трения (КТ), эластичность и упругость. Эти параметры в сочетании с формой и длиной ножки воздействует на скорость и способность управлять направлением устройства.
[0144] КТ может иметь важное значение в управлении направлением и движением устройства. КТ, как правило, достаточно высок, чтобы обеспечить сопротивление боковому уклону (например, самопроизвольному движению или плаванию) пока устройство движется вперед. В частности, КТ кончиков ножки (то есть часть ножки, контактирующая с опорной поверхностью) может быть достаточным для, по существу, исключения самопроизвольного движения в боковом направлении (то есть, по существу, перпендикулярном направлению движения), которое в противном случае является результатом вибрации, вызванной вращением внецентренной нагрузки. КТ также может быть достаточно высоким, чтобы избегать значительное подпрыгивание для обеспечения движения вперед, если Fv внизу и ножки обеспечивают толчок вперед. Например, так как ножки сгибаются по направлению к задней части устройства 100 (например, в другую сторону от направления движения) из-за результирующей силы, воздействующей на одну или более приводные ножки (или другие ножки), и которая вызвана вращением внецентренной нагрузки, КТ достаточен для исключения существенного проскальзывания между кончиком ножки и опорной поверхностью. В другой ситуации, КТ может быть достаточно низким, чтобы позволить ножкам проскальзывать (при соприкосновении с землей) назад к их обычному положению, если Fv положительна.
Например, КТ является достаточно низким, таким образом, результирующие силы на устройство 100 побуждают устройство к подпрыгиванию, упругость ножки 104 побуждает ножки к возвращению в нейтральное положение, не создавая силу, противоположную направлению движения, и достаточную для преодоления одной или обеих сил трения между одной или более из других ножек (например, задних ножек 104c), соприкасающихся с опорной поверхностью, или для преодоления инерции устройства 100 от движения устройства 100 вперед. В некоторых примерах одна или более чем одна приводная ножка 104а может покинуть (то есть полностью подпрыгнуть) опорную поверхность, что позволяет приводным ножкам вернуться в нейтральное положение без выработки обратной силы трения. Однако приводные ножки 104а могут не покидать опорную поверхность каждый раз, когда устройство 100 подпрыгивает, и/или ножки 104 могут начать проскальзывать вперед до того, как ножки покинут поверхность. В таких случаях ножки 104 могут двигаться вперед, не вызывая значительное усилие на себя, которое преодолевает переднюю движущую силу устройства 100.
[0145] Эластичность и упругость, как правило, выбираются для обеспечения желаемых моментов движения и подпрыгивания ножек. Эластичность ножки может позволить ножкам сгибаться и сжиматься, когда Fv внизу, и носовая часть движется вниз. Упругость материала может обеспечить способность высвобождать энергию, поглощенную сгибанием и сжатием, увеличивая скорость движения вперед. Материал может также избегать неупругую деформацию при сгибании.
[0146] Резина - пример одного типа материала, который может удовлетворить данным критериям, однако другие материалы (например, другие эластомеры) могут иметь схожие свойства.
[0147] Фигуры 7С и 7D коллективно показывают пример прикрепляемой с возможностью отсоединения конечности для устройства 100. Некоторые воплощения устройства 100, например, могут включать верхнюю конечность 105 (или какие-либо другие прикрепляемые с возможностью отсоединения конечности). Конечности могут прикрепляться (или повторно крепиться) по мере надобности, когда устройство 100 нужно применить в окружениях, в которых устройство 100 может подниматься с помощью конечностей восходящего устройства. Некоторые воплощения прикрепляемых с возможностью отсоединения конечностей могут включать приспособление для сжатия 720, которое можно крепко прикрепить к верхней конечности 105 устройства. В некоторых воплощениях приспособление для сжатия 720 может включать два зубца, которые могут проскальзывать в ушко 722 и защелкиваться на месте за счет зазубренных кончиков или какого-либо другого механизма/каких-либо других механизмов. На Фиг. 7D показана верхняя конечность 105 восходящего устройства, вставленная в ушко 722, а устройство 100 сконфигурировано для подъема.
[0148] Фигуры 7Е и 7F показывают другой пример с возможностью отсоединения конечности для устройства 100. Например, прикрепление с возможностью отсоединения 740 верхней конечности восходящего устройства может включать верхнюю конечность 105, которая прочно закреплена на монтажном зажиме 742. В некоторых воплощениях монтажный зажим 742 может включать два выступающих вниз конца, каждый из которых может подходить к выемке 744 (например, одной на каждой стороне устройства 100). На Фиг. 7F прикрепление 740 верхней конечности показано на месте на устройстве 100. Например, концы монтажного зажима 742 показаны захватывающими выемки 744 тела, а центральная часть монтажного зажима 742 с двух сторон охватывает устройство 100. Другие воплощения прикрепления конечностей также возможны. Например, может использоваться защелкивающийся каркас, который включает верхние и/или боковые конечности и захватывает большую часть выступа 112 тела устройства 100, чем монтажный зажим 742.
[0149] Фиг. 8 показывает примеры материалов, которые можно использовать для устройства 100. В примерном воплощении устройства 100, показанном на Фиг. 8, ножки 104 образованы из резины или другого эластомера. Ножки 104 могут изготавливаться путем литья под давлением, таким образом, чтобы множество ножек формовались с цельной оболочкой, по существу, одновременно (например, как часть одной и той же литой детали). Ножки 104 могут быть частью сплошной или цельной части резины, которая также формирует носовую часть 108 (включая стороны носовой части 116а и 116b), выступ 112 тела и поверхность 114 стороны верхней части. Как показано, цельная часть резины проходит поверх выступа 112 тела и поверхности 114 стороны верхней части до областей 802, частично покрывая верхнюю поверхность устройства 100. Например, часть цельной резины устройства 100 может быть сформирована и прикреплена (то есть совместно сформованы во время производственного процесса) поверх пластмассовой верхней части устройства 100, открывая области верхней части, которые показаны пластмассовыми областями 806, таким образом, чтобы тело формировало цельную совместно сформованную часть. Высшая точка 120 сформирована самыми верхними областями 806. Одна или более чем одна резиновая область 804, отделенная от сплошной резиновой части, включающей ножки 104, может покрывать части пластмассовых областей 806. В общем, резиновые области 802 и 804 могут отличаться по цвету от областей из пластмассы 806, что может обеспечить визуально отличительный внешний вид устройства 100. В некоторых воплощениях модели, сформированные различными областями 802-806, могут заставлять устройство выглядеть как насекомое или другой живой объект. В некоторых воплощениях различные образцы материалов и цветов могут использоваться для того, чтобы сделать устройство 100 похожим на насекомых или другие объекты. В некоторых воплощениях хвостовая часть (например, сделанная из тонкой веревки) может прикрепляться к концу задней части устройства 100, чтобы сделать устройство 100 похожим на маленького грызуна.
[0150] Выбор используемых материалов (например, эластомер, резина, пластмасса и т.д.) может оказывать значительное влияние на способность устройства к выпрямлению. Например, резиновые ножки 104 могут иметь достаточную упругость к сгибанию во время работы устройства 100, включая сгибание в ответ на движение (и силы, созданные движением) внецентренной нагрузки, вращаемой двигателем 202. Более того, кончики ножки 104, также сделанные из резины, могут иметь коэффициент трения, который позволяет приводным ножкам (например, передним ножкам 104) отталкиваться от поверхности 110 без существенного проскальзывания.
[0151] Использование резины на носовой части 108 и плече 112 может также помочь устройству 100 самоотрегулироваться. Например, материал, такой как резина, имеющие более высокую эластичность и способность к уплотнению, чем твердые пластмассы, может поспособствовать отскоку носовой части 108 и плеча 112, тем самым упрощая саморегулирование, за счет уменьшения сопротивления качению, когда устройство 100 на боку. В одном из примеров, если устройство 100 располагается на боку, в то время, как мотор 202 запущен, и если мотор 202 и внецентренная нагрузка располагаются рядом с носовой частью 108, прорезиненные поверхности носовой части 108 и плеча 112 могут способствовать тому, что, по крайней мере, носовая часть устройства 100 отскочит, что приведет к саморегулированию устройства.
[0152] В некоторых воплощениях одна или несколько ножек 104с могут иметь коэффициент трения, отличающийся от передних стек 104а. Например, ножки 104, в общем, могут быть изготовлены из различных материалов и могут быть прикреплены к устройству 100 в качестве отдельных деталей. В некоторых воплощениях задние ножки 104c могут быть частью цельносформованной резиновой детали, которая имеет все ножки 104, а задние ножки 104c могут быть модифицированы (например, с нанесенным покрытием) для изменения их коэффициента трения.
[0153] Несмотря на то что данные спецификации содержат множество особых деталей, относящихся к реализации, они не должны истолковываться в качестве ограничения объема любых изобретений или того, применительно к чему они могут быть заявлены, а, предпочтительно, должны расцениваться в качестве описания признаков, определяющих конкретные воплощения определенных изобретений. Определенные признаки, которые описаны в данной спецификации в контексте отдельных изобретений, могут также быть осуществлены в едином воплощении. Напротив, различные признаки, которые описаны в контексте единого воплощения, могут быть также осуществлены во множестве воплощений по отдельности или в любой подходящей подкомбинации. Более того, несмотря на то что признаки могут быть описаны выше как работающие в определенных комбинациях и даже первоначально заявлены как таковые, один или несколько признаков из заявленной комбинации могут, в некоторых случаях, быть извлечены из комбинации, и заявленная комбинация может относиться к субкомбинации или варианту субкомбинации. Также могут быть выполнены другие альтернативные воплощения. Например, некоторые варианты изготовления устройства 100 могут не включать использование резины. Некоторые варианты устройства 100 могут включать компоненты (например, изготовленные из пластмассы), которые имеют свойство светиться в темноте, так что устройство 100 может быть обнаружено в темной комнате в процессе перемещения по поверхности (например, по кухонному полу). Некоторые воплощения устройства 100 могут включать источник света (например, светодиодную лампу), которая прерывисто мерцает, когда устройство 100 движется по поверхности 110.
[0154] Фигура. 10А представляет собой график последовательности процесса 1000 работы питаемого благодаря вибрации устройства 100 (например, устройства, которое включает любую надлежащую комбинацию признаков, описанных выше). В различных воплощениях могут быть включены различные поднаборы вышеописанных признаков.
[0155] Первоначально питаемое благодаря вибрации устройство размещается на, по существу, ровной или какой-либо другой поверхности (например, имеющей такую форму, что множество ножек устройства контактируют с поверхностью) при 1005. Вибрация устройства, производимая при 1010, побуждает его двигаться вперед. Например, вибрация может производиться благодаря использованию коллекторного двигателя (например, работающего от батареи или пружины), который вращает противовес. Вибрация может производить движение в направлении, соответствующем смещению между основаниями ножками и концами ножки одной или нескольких приводных ножек (например, в прямом направлении). В частности, вибрация может побуждать упругие ножки изгибаться в одном направлении, при 1015, в то время, как направленные вниз результирующие силы побуждают устройство перемещаться вниз. Упомянутое загибание, при условии использования материала с достаточно высоким коэффициентом трения во избежание проскальзывания, может побуждать устройство к движению вперед.
[0156] Поскольку вибрация является причиной направленных вверх результирующих сил (например, вследствие векторной суммы сил, производимых вращением противовеса и пружинящего эффекта упругих ножек), то это побуждает приводные ножки отрываться от поверхности или становиться ближе к моменту отрывания от поверхности, а концы одной или нескольких приводных ножек движутся прямо (например, ножки отклоняются вперед до возврата в нейтральное положение) на 1020. В некоторых воплощениях одна или несколько приводных ножек могут покидать поверхность при различных интервалах. Например, приводные ножки могут не отрываться от поверхности всякий раз, когда результирующие силы направлены вверх, поскольку силы могут не покрывать нисходящую инерцию от предшествующего прыжка. Кроме того, то количество времени, за которое приводные ножки отрываются от поверхности, может различаться для разных прыжков (например, в зависимости от высоты прыжка, который, в свою очередь, может зависеть от степени, в которой вращение противовеса находится в фазе с пружиной ножки).
[0157] Во время движения вперед устройства, различные тяговые силы могут образовываться на каждой боковой стороне устройства при 1025. В общем, эти различные тяговые силы могут образовываться задними ножками, которые имеют склонность к тяге (или, по крайней мере, тянут в большей степени, чем передние приводные ножки) и изменяют характеристики движения устройства (например, для противодействия или улучшения ходовых свойств). Обычно ножки могут быть расположены в (например, два) ряда вдоль каждой боковой стенки устройства, так что одна или несколько ножек в ряду тянут в большей степени, чем соответствующие ножки в другом ряду. Различные технологии, заставляющие устройство генерировать различные тяговые силы, описаны выше.
[0158] Если устройство переворачивается, качение устройства осуществляется на 1030. В общем, данная тенденция к качению может производиться за счет вращения противовеса, помогая устройству независимо найти правильное положение. Как говорилось выше, внешняя форма устройства вдоль продольного направления (т.е. по существу, параллельного оси вращения и/или общему направлению движения вперед устройства) может быть выполнена таким образом, чтобы помогать качению (например, за счет подражания продольной «закругленности»). Качение устройства может останавливаться за счет относительно большой ширины между рядами ножки на 1035. В частности, если ножки достаточно широки относительно устройства ЦТ, то силы вращения, генерируемые вращающимся противовесом, по существу, являются недостаточными (отсутствие дополнительных сил) для того, чтобы заставить устройство перевернуться из стоячего положения.
[0159] На 1040, благодаря упругости носовой части устройства возможен отскок, если устройство сталкивается с препятствием (например, стеной). Эта способность к отскакиванию может упростить изменение направления для того чтобы избежать препятствие или взять больший угол наклона, в частности, когда объединяется с остроконечным носом, как говорилось ранее. Упругая носовая часть может быть изготовлена из эластомерных материалов и может быть цельно сформована вместе с боковыми плечами и/или ножки с использованием того же эластомерного материала. Наконец, боковая тяга может быть погашена на 1045 из-за достаточно высокого коэффициента трения на концах ножки, что не позволяет ножкам скользить в боковом направлении, когда вращающийся противовес образует боковые силы.
[0160] На фигуре 10B изображен график процесса 1050 для устройства 100, приводимого в движение благодаря вибрации при подъеме. Например, устройство 100 может включать любую соответствующую комбинацию признаков, описанную выше (например, конечности, которые соприкасаются с противоположными конечностями). В различных воплощениях могут иметь место различные поднаборы признаков, описанные выше. Процесс 1050 может быть использован в комбинации с процессом 1000 (см. Фиг. 10А), например, когда устройство 100 функционирует и переходит между, по существу, плоскими областями, что может упростить произвольное перемещение, в другие области, которые включают трубопроводы или прочие приспособления, в которых устройство может взбираться.
[0161] Первоначально приводимое за счет вибрации устройство находится в наклоненном (и, по крайней мере, частично, закрытом) трубопроводе на 1055. Как пример, трубопровод может быть трубопроводом 901, показанным на Фиг. 9А. Устройство 100 может проникать в трубопровод 901, например, после того, как устройство осуществляет перемещение через соединительный проход 906. В другом примере, трубопровод может являться узловым трубопроводом 950, изображенном на фигуре 9С, и устройство 100 может проникать в узловой трубопровод 950 через вход 952. Другие варианты могут задействовать трубопроводы, имеющие иные формы.
[0162] Вибрация устройства производится для вариативно побуждаемого движения вперед каждой из двух или более конечностей, расположенных в различных направлениях на 1060. Например, поскольку устройство 100 проникает в трубопровод (например, трубопровод 901 или узловой трубопровод 950), вибрация, производимая вращательной электрической нагрузкой, вариативно побуждает движение в направлении ножек 104 и верхних конечностей 105 (или боковых конечностей 105а-105b). Конечности устройства 100 располагаются в различных направлениях, поскольку ножки 104 выступают, по существу, вниз из устройства 100, а верхние конечности для подъема 105 (или боковые конечности 105а-105b) выступают вверх (или, по существу, в бок) относительно устройства 100.
[0163] Вибрация обеспечивает воздействие, по существу, противодействующих сил на конечности при 1065. Каждая противодействующая сила действует в направлении, которое, по существу, ортогонально переднему направлению. Например, вибрация проявляется в направленных под прямым углом силах, производимых ножками, что побуждает ножки 104 контактировать и прижиматься к поверхности трубопровода, такой как поверхность пола трубопровода 901. Поскольку вибрация (и упругие силы ножек 104), по существу побуждают устройство 100 перемещаться в противоположном направлении; вибрация приводит к тому, что направленные под прямым углом силы подъемных конечностей побуждают верхние подъемные конечности 105 контактировать и прижиматься к поверхности потолка при помощи противодействующей силы. Переменные и противодействующие силы могут возникать в быстрой последовательности и обычно ортогонально направлению перемещения устройства (например, направлению перемещения через трубопровод 901 или узлов ой трубопровод 950).
[0164] Устройство отражается в прямом направлении за счет сопротивления перемещению при помощи хода конечностей в обратном направлении при 1070. Например, в дополнение к ортогональным силам, появившимся благодаря вращению внецентренной нагрузки, компоненты дополнительной силы обеспечивают движение устройства вперед. В частности, концы ножек 104 и верхние конечности для подъема 105 (либо боковые конечности для подъема 105а-105b) имеют коэффициенты трения, которые позволяют концам «цепляться» за поверхности трубопровода, удерживая устройство 100 от соскальзывания в обратном направлении.
[165] Устройство способно осуществлять подъем благодаря использованию противоположных сил и отклонению конечностей при 1075. Например, изменение сцепления за счет ножек 104 и подъемных конечностей позволяет устройству 100 взбираться по трубопроводу.
[166] Фигура 11 изображает график технологических процессов 1100 для создания устройства 100, приводимого в движение за счет вибрации (например, устройства, включающего любую соответствующую комбинацию признаков, описанную выше). Первоначально, шасси устройства формуется при 1105. Шасси устройства может представлять собой дно 122, показанное на фигуре 1 и может быть изготовлено из твердых пластиков или других относительно твердых или неэластичных материалов, хотя выбор типа материала донной части не является существенным при работе устройства. Верхняя оболочка также формуется при 1110. Верхняя оболочка может включать относительно твердую верхнюю часть корпуса 102, изображенную на Фиг. 1, включающего наивысшую точку 120.
[0167] Верхняя оболочка совместно сформована с эластомерным телом при 1115 для образования верхнего тела устройства. Эластомерное тело может включать цельный, интегрально сформованный кусок, который включает конечности (например, ножки 104), плечи 112 и носовую часть 108. Совместное формование твердой верхней оболочки и более эластичного тела демонстрирует лучшую способность к сборке (например, твердый участок легче прикрепляется к шасси устройства при помощи винтов и посадочных мест), обеспечивая лучшую продольную жесткость, облегчает самовыравнивание (как разъясняется выше) и может предусматривать ножки для облегчения прыжков, движения вперед и управлениями поворотами. В некоторых воплощениях конечности, которые являются интегрально сформованными с эластичным эластомерным телом, может включаться одна или несколько верхних конечностей для подъема 105 и/или две или несколько боковых конечности для подъема (например, боковые конечности для подъема 105а и 105b) или их комбинация. В вариантах, в которых конечности, такие, как конечности для подъема 105, 105а и 105b, могут отсоединяться и прикрепляться, тело может быть сформовано вместе с перемычкой 722, имеющей отверстия, выемки в теле 744, или другими признаками, предназначенными для прикрепления конечностей.
[0168] Корпус собирается при 1120. Корпус обычно включает батарею, переключатель, вращающийся моторчик, внецентренную нагрузку, которые могут быть помещены между дном устройства и верхней оболочкой.
Трубопроводы
[0169] Фиг. 12А демонстрирует пример трубы 1200, в котором множество устройств 100 может функционировать и взаимодействовать. В данном примере, труба 1200 включает три области 1202а-1202с, каждая из которых может иметь шестиугольную форму, как показано. Как показано на Фиг. 12А, области 1202-1202c имеют три различных подъема соответствующего уровня и параллельных друг другу, но насколько это возможно, разных конфигураций. Области 1202а является самой высокой из трех областей, а область 1202c находится в самом низу, при этом область 1202b, по существу, находится в середине.
[0170] Области 1202а-1202с соединены трубчатыми конструкциями 1204а-1204е различной длины, форм и конфигураций. Например, трубчатые конструкции 1204а и 1204с каждая соединены с областями от 1202а-1202с. Аналогично, трубчатые конструкции 1204b и 1204d каждая соединяются с областями 1202а-1202b. Наконец, трубчатая конструкция 1204е соединяет 1202c саму с собой благодаря петле в трубчатой конструкции 1204е, проходящей над вершиной области 1202b. Соединения между областями 1202а-1202c и трубчатыми конструкциями 1204а-1204е сделаны в области проходных ворот вдоль боковых сторон областей 1202а-1202с. Закрытые ворота, если трубчатые конструкции 1204а-е не соединены с областями 1202а-1202c, могут не позволить устройствам 100 выйти за пределы трубопровода 1200 в процессе работы. В некоторых вариантах, трубчатые конструкции 1204а-е могут быть соединены при помощи трубчатых компонентов и соединительных элементов, описанных ниже с отсылкой к Фиг. l3A-13W и 14А-14Н. Возможны другие конфигурации трубчатых конструкций, включая трубчатые конструкции из твердого материала и/или конструкции, которые используют компоненты, не описанные на Фиг. 13A-13W и 14А-14Н.
[0171] Фиг. 12B изображаtт вид сверху трубопровода 1200. Данный вид наиболее ясно демонстрирует обе боковые стороны трубчатой конструкции 1204е. Ворота 1208 показаны в открытом положении.
[0172] Различные соединительные элементы могут быть использованы для того, чтобы соединить компоненты трубопровода 1200. Например, один тип соединительных элементов 1206а (например, ссылаясь на Фиг. 14Е-Н) может соединять один из нескольких различных типов труб с любой из областей 1202а-1202с. Второй тип соединителей 1206b (например, ссылаясь на Фиг. 14-A-D) может соединять пары труб.
[0173] Фигуры 13A-13D изображают различные изображения прямой трубчатой конструкции 1300. В частности, Фиг.13А - вид сверху, Фиг. 13В - перспектива, Фиг. 13С - вид сбоку, Фиг. 13D - фронтальный вид. Фиг. 13B и 13D демонстрируют отверстие 1302, через которое 100 может перемещаться, например, по всей длине прямой трубчатой конструкции 1300. В некоторых воплощениях прямая трубчатая конструкция 1300 может быть достаточно широка чтобы иметь две дорожки, позволяя прохождение двух устройств 100. Дорожки не являются обычными дорожками или очерченными дорожками, как таковыми, но отверстие 1302 имеет ширину, которая равна, или более чем удвоенная ширина устройства 100 (в самой широкой точке). Фактически, два устройства 100 могут перемещаться, по существу параллельно, внутри прямой трубчатой конструкции 1300 (что применимо и к другим трубчатым конструкциям, в данном документе), и два устройства 100 могут разминуться, отскочив друг от друга и продолжив движение.
[0174] В некоторых воплощениях прямая трубчатая конструкция 1300 может включать ребра 1304 (или другие признаки), которые могут упростить надлежащее расположение соединительных элементов. Например, соединители, как те, что подробно описаны ниже, могут соединять прямую трубчатую конструкцию 1300 с другой трубчатой конструкцией или другим компонентом, используемым в месте использования устройства 100 (например, трубопроводе 1200). В некоторых воплощениях соединительные элементы могут сцепляться с ребрами 1304, например накладываясь на верхнюю часть конструкции 1300 и гранича с ребром 1304. Таким образом, ребра 1304 являются ограничительными точками, например, ограничивая движение соединителя, который скользит к концу прямой трубчатой конструкции 1300.
[0175] В некоторых воплощениях прямая трубчатая конструкция 1300 изготавливается из двух частей (например, из двух половин), которые соединяются по швам 1306. В некоторых воплощениях прямая трубчатая конструкция 1300 представляет собой цельную часть.
[0176] Фиг. 13Е-13G представляют собой пример размеров прямой трубчатой конструкции 1300. Размеры устройства 100 также показаны, поскольку его размеры напрямую относятся к размерам прямой трубчатой конструкции 1300. Фигуры 13Е-13G изображают вид сверху, сбоку и спереди, соответственно, устройства 100 с заднего конца внутри прямой трубчатой конструкции 1300.
[0177] Ссылаясь на Фиг. 13Е, расстояние от носа до конечности для подъема 1310 (например, 15 мм) определяет расстояние от носа 108 до передней части конечности для подъема 105. Ссылаясь на фигуру 13F, подъем конечности для вскарабкивания 1312 (например, 22 мм.) определяет подъем верхней части конечностей для вскарабкивания 105 относительно ножки 104. Ссылаясь на Фиг. 13G, ширина трубы 1314 (например, 30 мм) и высота трубы 1316 (например, 20 мм) определяют внутреннюю ширину и высоту соответственно, прямой трубчатой конструкции 1300. В некоторых воплощениях ширина трубы 1314 и высота трубы 1316 могут использоваться в других компонентах, например других прямых трубчатых конструкциях (например, другой длины), изогнутых конструкциях, и/или конструкциях других форм и конфигураций. Размер разноса ножки 1318 (например, 14 мм) приводится здесь для того, чтобы продемонстрировать относительную ширину устройства 100 в наиболее широкой точке, т.е. по внешним краям ножки 104. Например, поскольку пример размера разноса ножки 1318 составляет 14 мм, что меньше чем вдвое? чем ширина трубы 1314, равная 30 мм, доступное горизонтальное пространство в прямой трубе 1300 пригодно для прохождения двух устройств 100.
[0178] Фиг. 13Н-13К демонстрируют различные виды изогнутой трубчатой конструкции 1322. В частности, Фиг 13Н представляет вид сбоку, Фиг. 131 вид сзади, Фиг. 13J вид с низу, Фиг. 13К - перспективу. Ссылаясь на Фиг. 13Н, устройство 100 может проникать в изогнутую трубчатую конструкцию 1322 через переднее отверстие 1324 в передней части изогнутой трубчатой конструкции 1322. Фиг.13К демонстрирует отверстие 1326, через которое устройство 100 может покидать изогнутую трубчатую конструкцию 1322 после входа через переднее отверстие 1324 и подъем через трубу. Устройства 100 могут перемещаться в любом направлении через изогнутую трубчатую конструкцию 1322.
[00179] Изогнутая трубчатая конструкция 1322 может иметь те же самые или схожие размеры, что и прямая трубчатая конструкция 1300. (т.е. ширина 30 мм и высота 20 мм). Как результат, когда изогнутая трубчатая конструкция 1322 соединяется с другим компонентом, таким как прямая трубчатая конструкция 1300, устройство 100 может без лишних помех осуществить переход через соединительные точки. Более того, ширина изогнутой трубчатой конструкции 1322 достаточна для прохождения двух устройств 100.
[0180] В некоторых воплощениях изогнутая трубчатая конструкция 1322 может иметь ребра 1328 (или другие признаки), которые облегчают крепление с соединительными элементами. Например, соединители, как подробно описано ниже, могут соединять изогнутую трубчатую конструкцию 1322 с другой трубчатой конструкцией или с другим компонентом, используемым в качестве места функционирования устройства 100 (например, трубопровод 1200).
[0181] Фиг. 13L-13Q демонстрируют различные виды Y-образной трубчатой конструкции 1334. В частности, Фиг. 13L изображает вид сбоку, Фиг. 13М - вид спереди, фиг.13N - перспективу, Фиг. 130 - вид снизу, Фиг. 13Р - боковой вид в разрезе и Фиг. 13Q -перспектива в разрезе.
[0182] Y-образная трубчатая конструкция 1334 включает створку 1336 в промежутке между прямым участком 1338 и изогнутым участком 1340. Створка 1336 может контролировать направление движения устройств 100 внутри Y-образной трубчатой конструкции 1334. Ссылаясь на Фиг. 13Р и 13Q, створка 1336 изображена закрытой, т.е. находящейся в опущенном положении, по существу, параллельно прямому участку 1338. Когда створка 1336 закрыта, устройства 100 может перемещаться прямо вниз или прямо вверх через прямой участок 1338, и устройство 100, перемещаясь вверх, не может попасть в изогнутый участок 1340. Створка 1336 опущена из соединительной точки на шарнире 1342, на котором створка 1336 может поворачиваться.
[0183] Когда створка 1336 закрыта, устройство 100, перемещаясь вниз через изогнутый участок 1340, может открыть створку 1336. Нос 108 или другие части устройства 100 нажатием могут открыть створку 1336. В это время низ створки 1336 может вступать в контакт с прямым участком 1338, по существу, рядом с положением 1344 на прямом участке 1338. Низ изогнутого участка 1340 имеет такую форму, что когда створка 1336 открыта и доходит до положения 1344, расстояние между створкой 1336 и, по существу, параллельной части изогнутого участка 1340, по существу, является равномерным (т.е. около 20 мм). Это расстояние соответствует высоте внутреннего пространства остальной Y-образной трубчатой конструкции 1334, что позволяет устройству 100 находится в по существу постоянном контакте с поверхностями Y-образной трубчатой конструкции 1334. Таким образом, продвижение вперед устройства 100, по существу, является непрерывным, несмотря на то что скорость не обязательно является постоянной.
[0184] В некоторых воплощениях, после того как одно или несколько устройств 100 переместили и затем прошли через створку 1336, сила притяжения может побуждать створку 1336 к возврату в закрытое или опущенное положение. В некоторых воплощениях в течение короткого периода времени створка находится в открытом положении, а устройство 100, проходящее вверх через прямой участок 1338 может проникнуть в изогнутый участок 1340.
[0185] Фигуры 13R-13S представляют различные виды узловой трубчатой конструкции 1350. В частности, Фиг. 13R - вид сбоку, Фиг. 13S - вид спереди, фиг. 13Т - перспектива, Фиг. 13U - вид снизу, Фиг. 13V - боковой вид в разрезе и Фиг. 13W - перспектива в разрезе. В данном примере, узловая трубчатая конструкция 1350 предусматривает признак узел-в-узле. Например, устройство 100 входит через любой конец (например, отверстие 1352), делает петлю и выходит с противоположного конца (например, отверстие 1354).
[0186] Узловая трубчатая конструкция 1350 включает перегородку 1356 и 1358, которая позволяет узловой конструкции 1350 быть двунаправленной. Соединительный участок 1360, соединяясь с перегородкой 1356 и 1358, побуждает данные перегородки двигаться, по существу, синхронно, т.е. осуществлять движение одной в зависимости от движения другой. В некоторых воплощениях соединительный участок 1360 может включать множество (например, три) взаимосвязанных шарнирных рычага. Например, когда устройство 100 проникает в узловую трубчатую конструкцию 1350 через отверстие 1352 и надавливает на перегородку 1356 вверх (если еще не поднята), соединительный участок 1360 побуждает перегородку 1358 опуститься. Перегородка 1358, таким образом, перенаправляет устройство 100 в округлый участок узловой трубчатой конструкции 1350. Когда устройство 100 почти полностью добирается до округлого участка, устройство 100 взаимодействует с и нажимает на перегородку 1356. Одновременно, прикрепленный соединительный участок 1360 побуждает перегородку подняться, позволяя устройству 100 пройти под перегородкой 1358 и покинуть узловую трубчатую конструкцию 1350 через отверстие 1354. Подобная последовательность действий наблюдается, если устройство 100 проникло в узловую трубчатую конструкцию 1350 через отверстие 1354.
[0187] В некоторых воплощениях пользователь может использовать соединительный участок 1360 и/или другой элемент для управления работой перегородок 1356 и 1358. Таким образом, пользователь может управлять направлением перемещения устройства 100 внутри узловой трубчатой конструкции 1250. Например, нажимаемые пользователем кнопки или другие элементы управления могут быть связаны с соединительным участком 1360.
[0188] В некоторых воплощениях соединительный участок 1360 может включать рукоятки, которые, по существу, перпендикулярны рычагам соединительного участка 1360. Рукоятки могут вставляться через слоты 1362 для соединения с перегородками 1356 и 1358, т.е. вдоль нижних сторон перегородок 1356 и 1358.
[0189] В некоторых воплощениях два устройства 100, перемещаясь в противоположных направлениях, могут находиться внутри узловой трубчатой конструкции 1350 в одно и то же время. Если два устройства 100 находятся в круглой части, где, например, какое-либо устройство достигшее первым соответствующей перегородки 1356 или 1358, оно первым покинет узловую трубчатую конструкцию 1350. В некоторых ситуациях, устройство 100 может временно перемещено к любой из перегородок 1356 или 1359, в то время как другое устройство 100 проходит под ней в противоположном направлении.
[0190] Фиг. 14А-14D демонстрируют различные виды соединителя 1400. В частности, Фиг. 14А представляет вид сверху, Фиг. 14В представляет собой вид в перспективе, Фиг. 14С представляет вид спереди, а Фиг. 14B - вид сбоку. Соединитель 1400 может использоваться для соединения пары труб, таких как любые две комбинации труб 1300, 1322, 1334 и 1350, описанные выше с отсылкой к Фиг. 13A-13W. Соединитель 1400 включает участки 1402а, 1402b и 1404. Участки 1402а и 1042b являются идентичными и делают соединитель 1400 симметричным и взаимозаменяемыми, тем самым позволяя либо участку 1402а, либо 1402b соединяться с любой из труб 1300, 1322, 1334 и 1350. Участок 1404 имеет ту же самую высоту и ширину, что и трубы 1300, 1322, 1334 и 1350. В некоторых воплощениях соединитель 1400 может быть использован в качестве соединителя 1206b, описанного выше с отсылкой на Фиг. 12А и 12В. Другие типы соединителей могут использоваться в других воплощениях.
[0191] Фиг. 14Е-14Н изображает различные виды других соединителей 1410. В частности, Фиг. 14Е представляет собой вид сверху, Фиг. 14F - перспективу, Фиг. 14С фронтальный вид и Фиг. 14Н вид сбоку. Соединитель 1410 может использоваться для соединения области (например, одной из областей 1202а-с) с одной из труб 1300, 1322, 1334 и 1350, описанные выше с отсылкой к Фиг. 13A-13W. Соединитель 1410 может использоваться для соединения трубы с компонентами другого типа, имеющими зажимное контактное соединение 1412.
[0192] Таким образом, конкретные воплощения предмета изобретения были описаны. Другие воплощения подпадают в объем защиты, обозначаемый следующими пунктами формулы.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ СЦЕПЛЕНИЯ СО СПИРАЛЬНОЙ ПРУЖИНОЙ, СОДЕРЖАЩИЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ, ПРИВОДЯЩИЙ СПИРАЛЬНУЮ ПРУЖИНУ В ЗАЦЕПЛЕНИЕ С ПОВЕРХНОСТЬЮ СЦЕПЛЕНИЯ | 2009 |
|
RU2517619C2 |
| ХИРУРГИЧЕСКАЯ СКОБКА И КАССЕТА СО СКОБКАМИ | 2014 |
|
RU2678360C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ, ИМЕЮЩИЙ ЗАПОРНЫЙ МЕХАНИЗМ | 2010 |
|
RU2552883C2 |
| КАССЕТА С КРЕПЕЖНЫМИ ЭЛЕМЕНТАМИ, СОДЕРЖАЩАЯ ВЫДВИЖНОЙ ПУСКОВОЙ ЭЛЕМЕНТ | 2014 |
|
RU2686047C2 |
| ИЗБИРАТЕЛЬНО ОРИЕНТИРУЕМЫЙ ИМПЛАНТИРУЕМЫЙ СШИВАЮЩИЙ КАРТРИДЖ | 2011 |
|
RU2575671C2 |
| ХИРУРГИЧЕСКИЕ КРЕПЕЖНЫЕ ДЕТАЛИ, АППЛИКАТОРЫ И МЕТОДЫ УСТАНОВКИ ХИРУРГИЧЕСКИХ КРЕПЕЖНЫХ ДЕТАЛЕЙ | 2010 |
|
RU2544224C2 |
| КАССЕТА С КРЕПЕЖНЫМИ ЭЛЕМЕНТАМИ, СОДЕРЖАЩАЯ ПУСКОВОЙ ЭЛЕМЕНТ, ВЫПОЛНЕННЫЙ С ВОЗМОЖНОСТЬЮ НЕПОСРЕДСТВЕННОГО ВЗАИМОДЕЙСТВИЯ С КРЕПЕЖНЫМИ ЭЛЕМЕНТАМИ ИЗ КАССЕТЫ С КРЕПЕЖНЫМИ ЭЛЕМЕНТАМИ И ИХ ПРОДВИЖЕНИЯ | 2014 |
|
RU2678017C1 |
| ХИРУРГИЧЕСКАЯ СКОБКА И КАССЕТА СО СКОБКАМИ | 2014 |
|
RU2685467C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С ШАРНИРНО ЗАКРЕПЛЕННЫМ УПОРОМ | 2012 |
|
RU2629240C2 |
| ХИРУРГИЧЕСКИЕ СКОБЫ С РАЗЛИЧНЫМИ ВАРИАНТАМИ ЖЕСТКОСТИ ДЛЯ УЛУЧШЕННОГО СШИВАНИЯ ТКАНИ | 2016 |
|
RU2727593C2 |
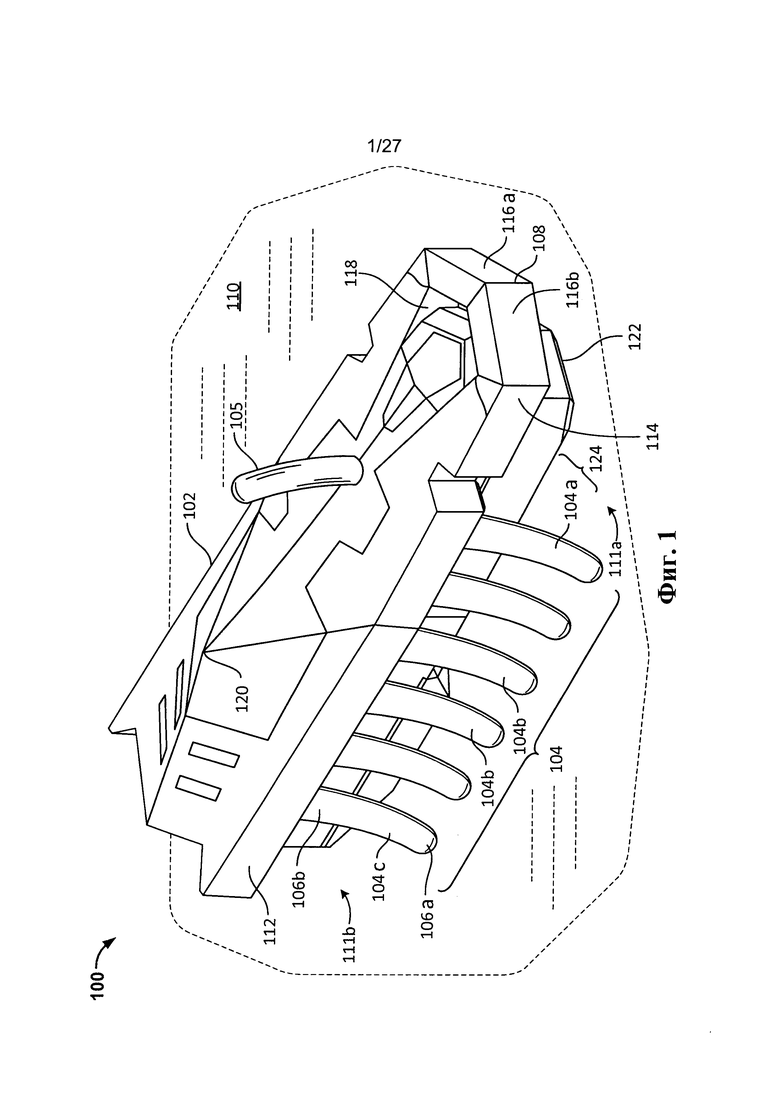
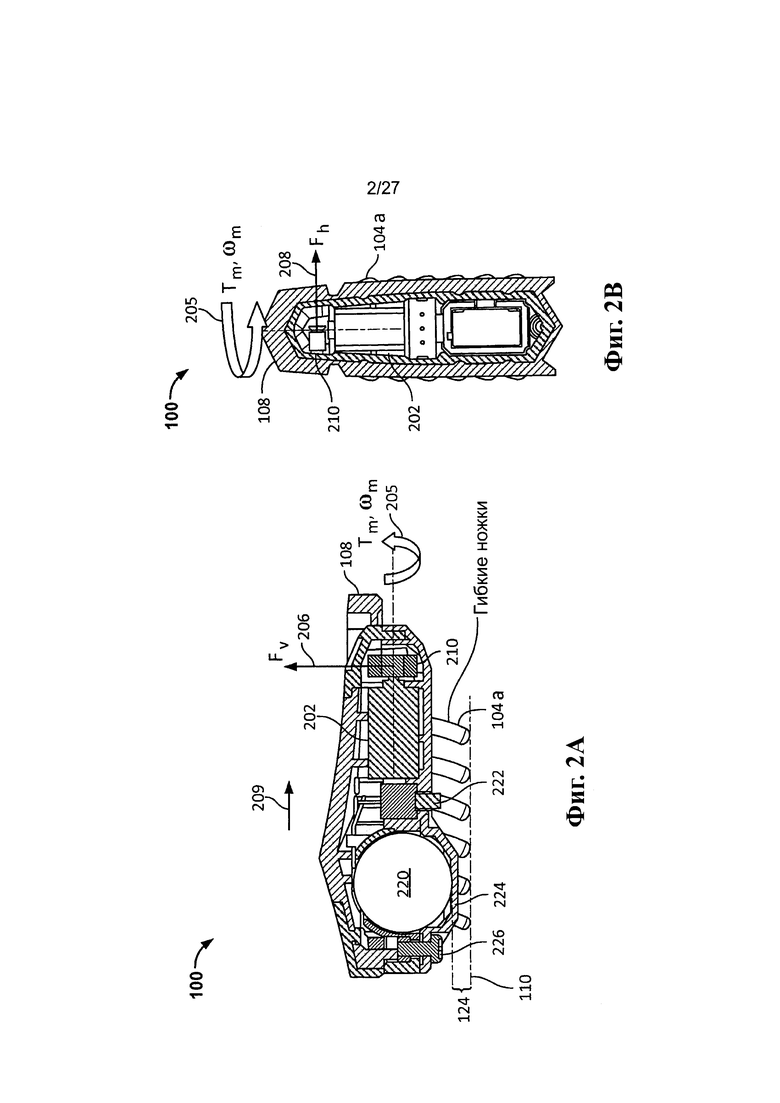
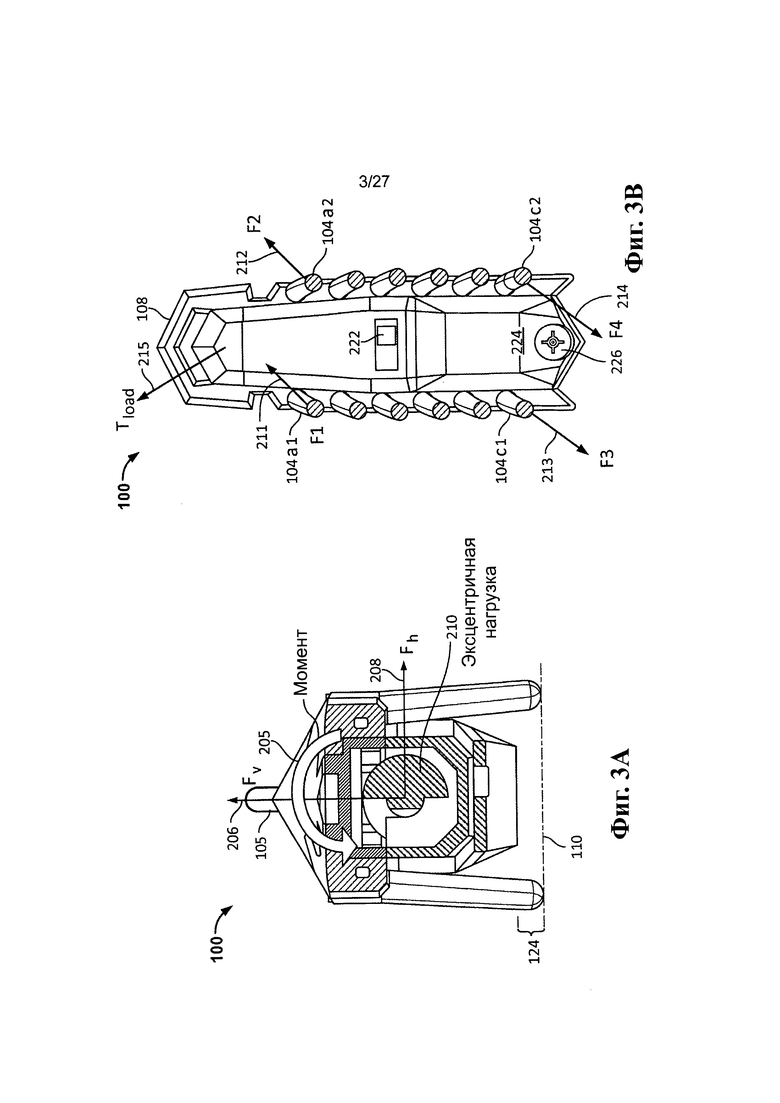
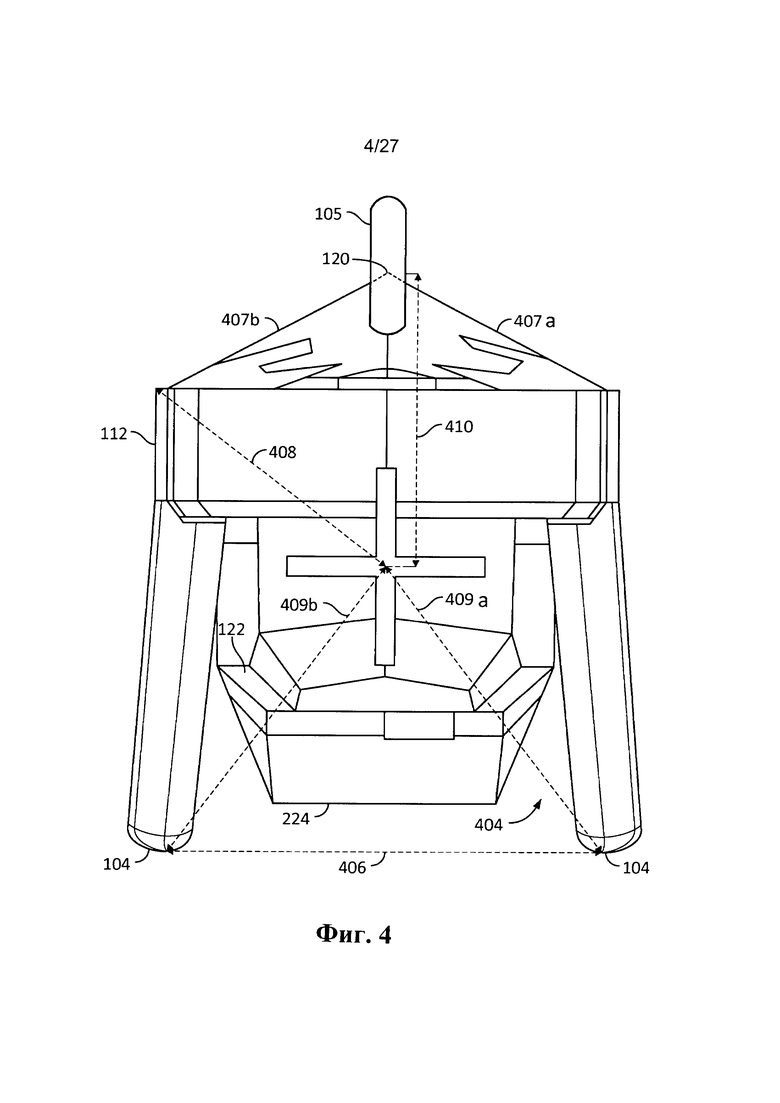
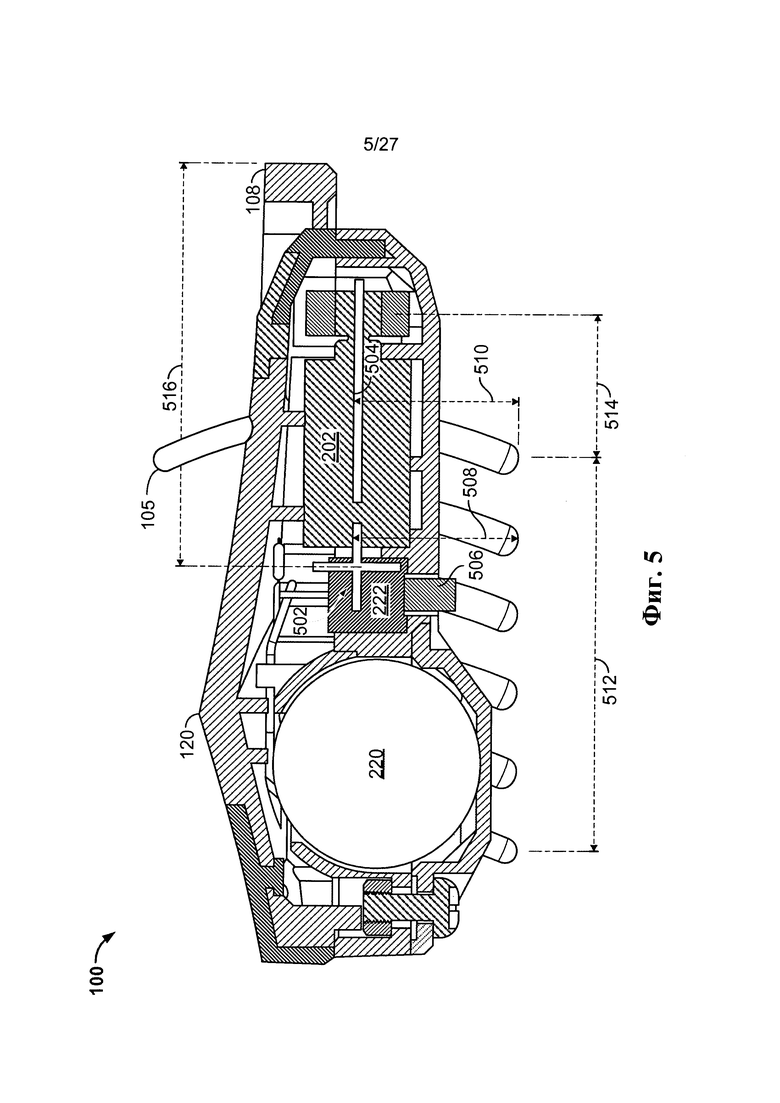
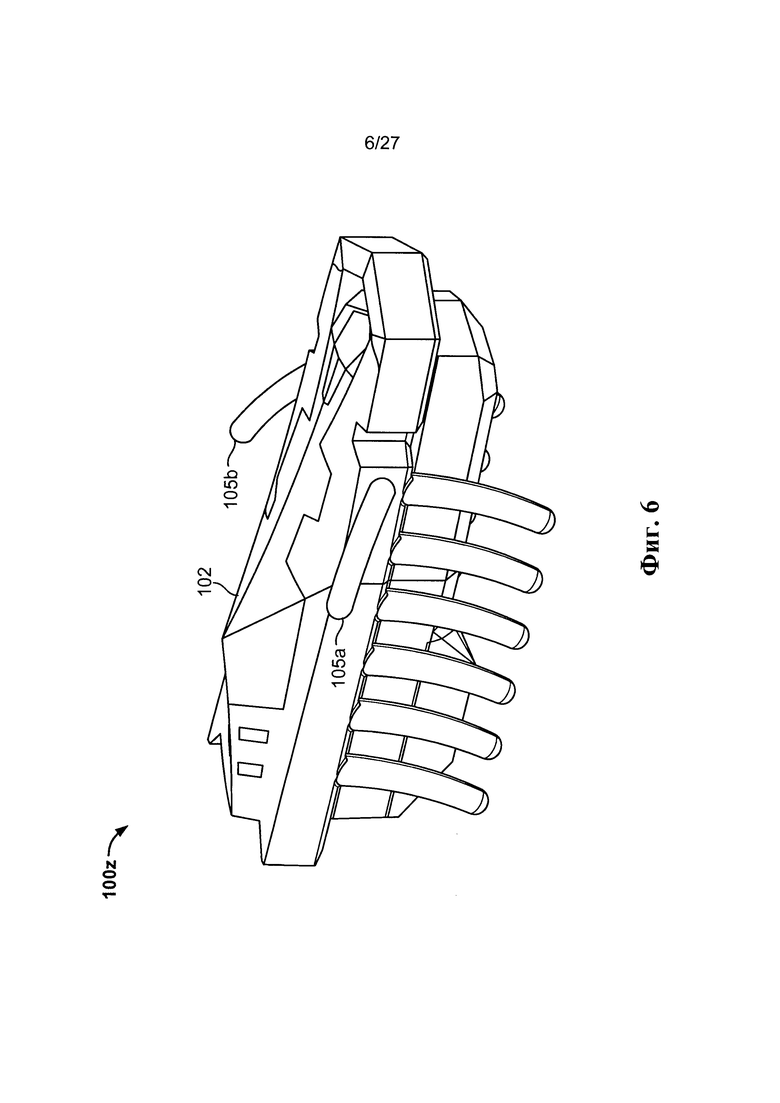
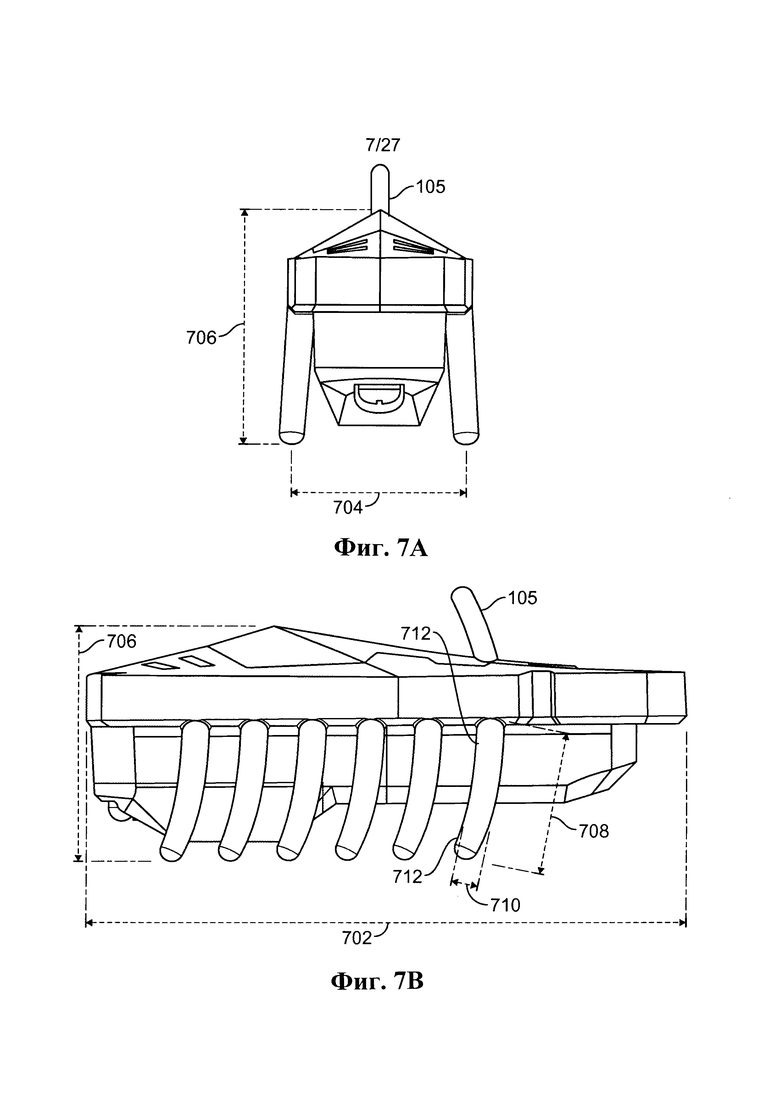
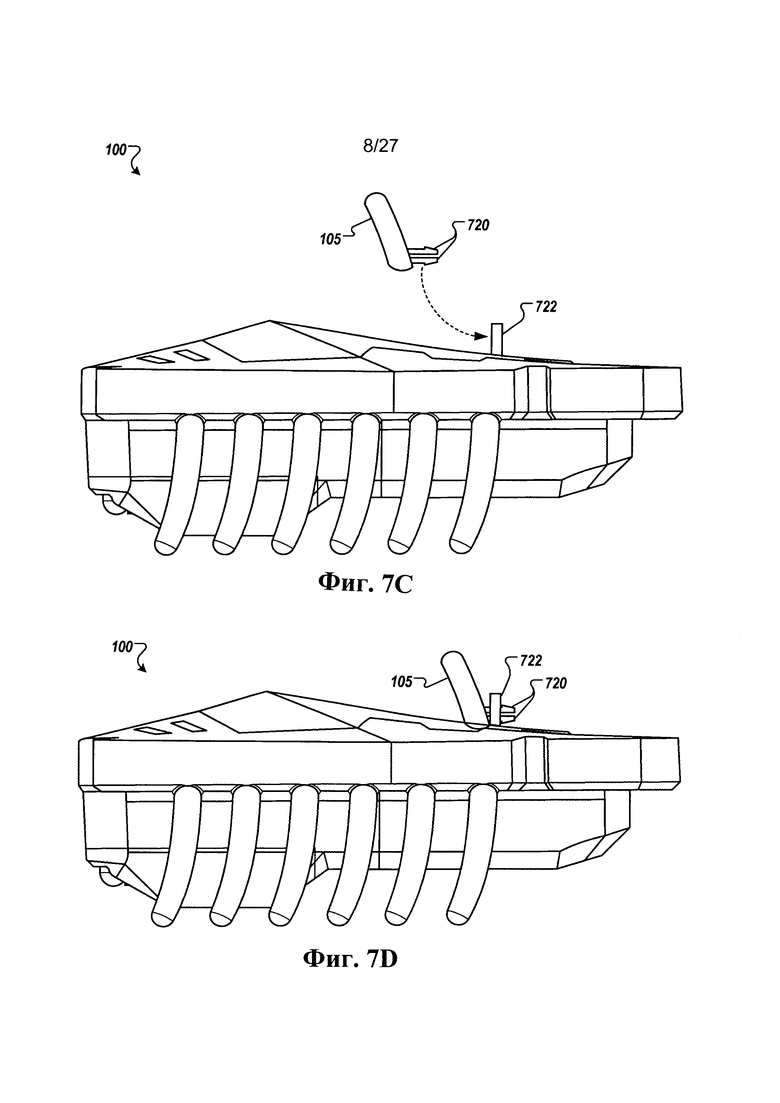
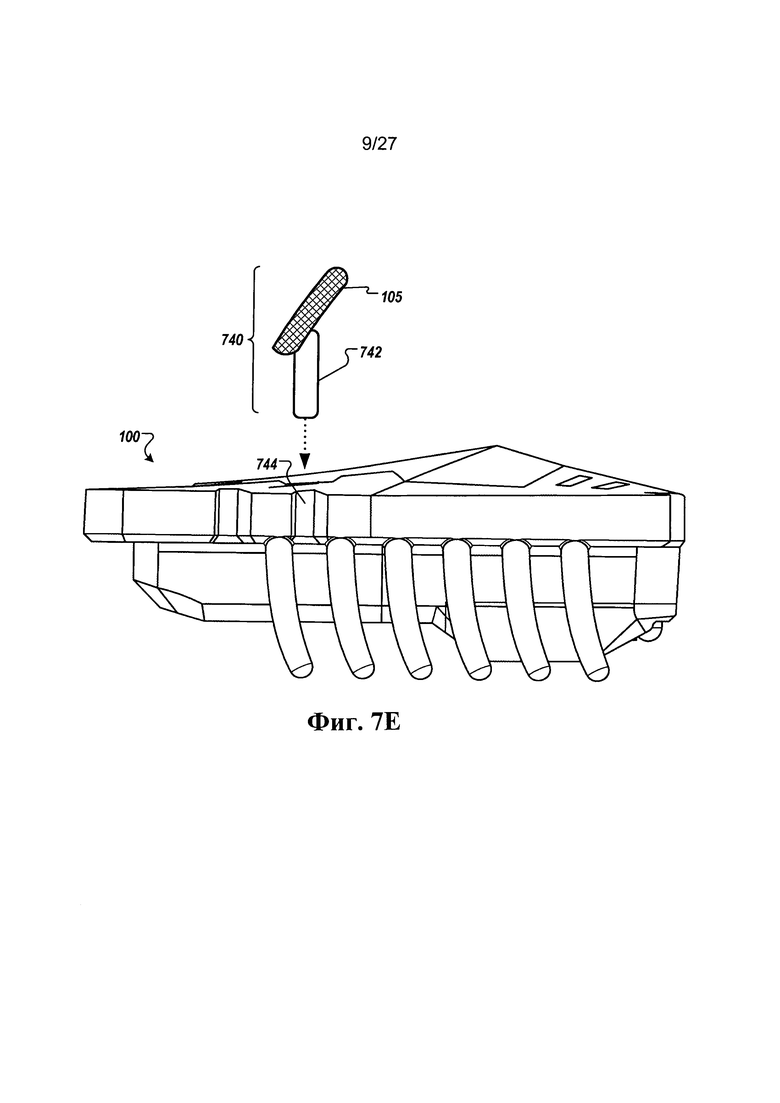
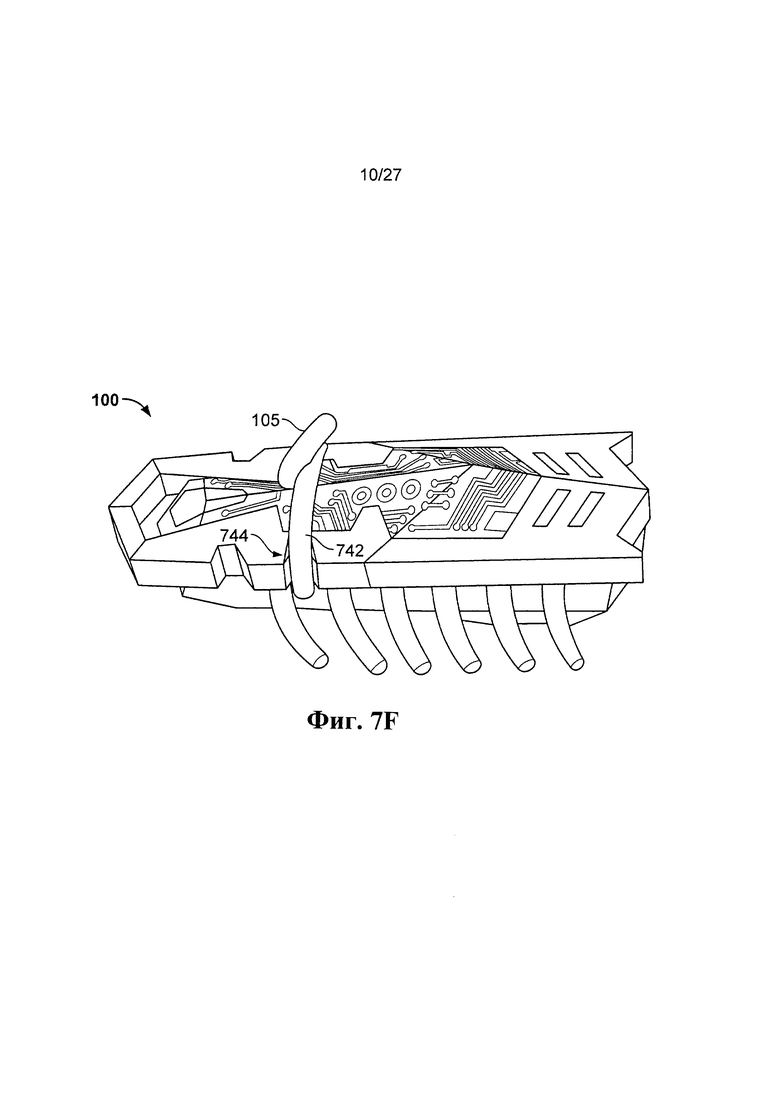
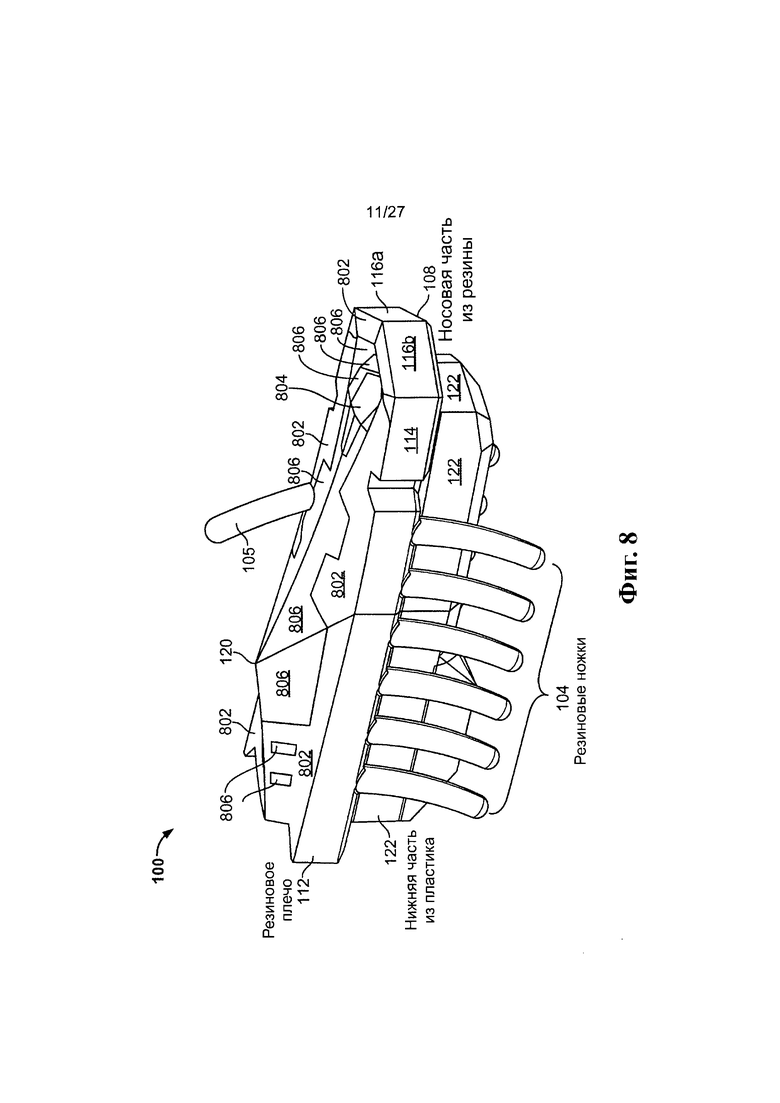
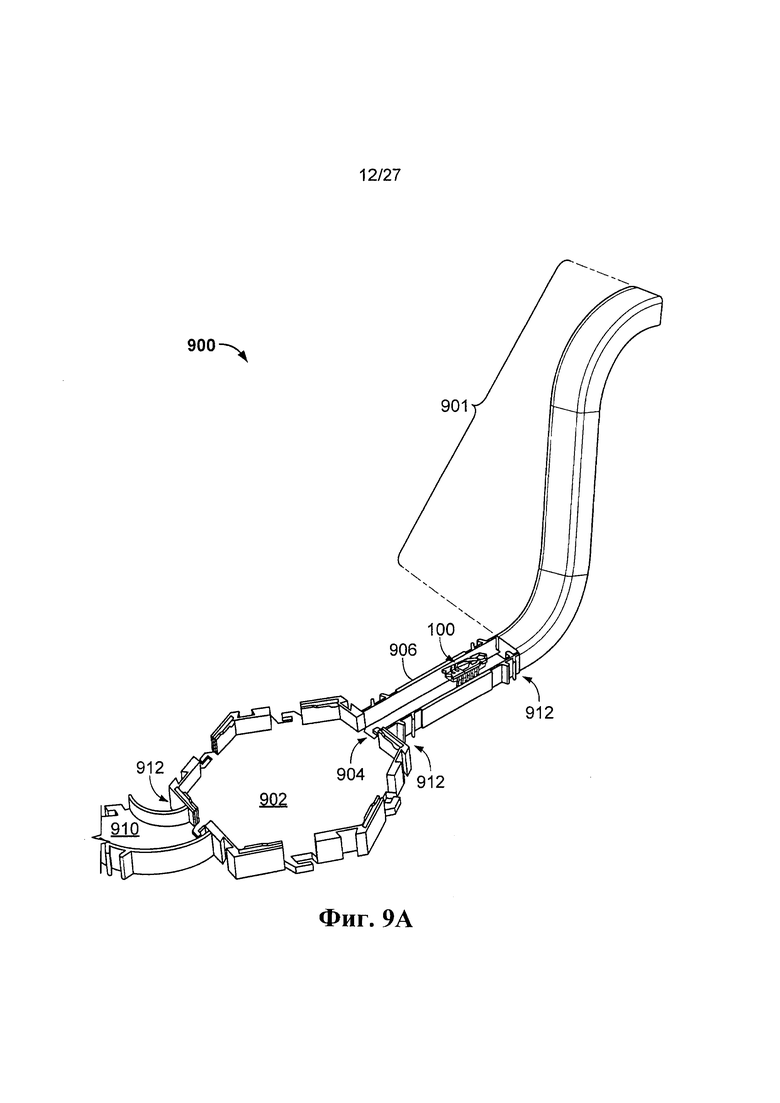
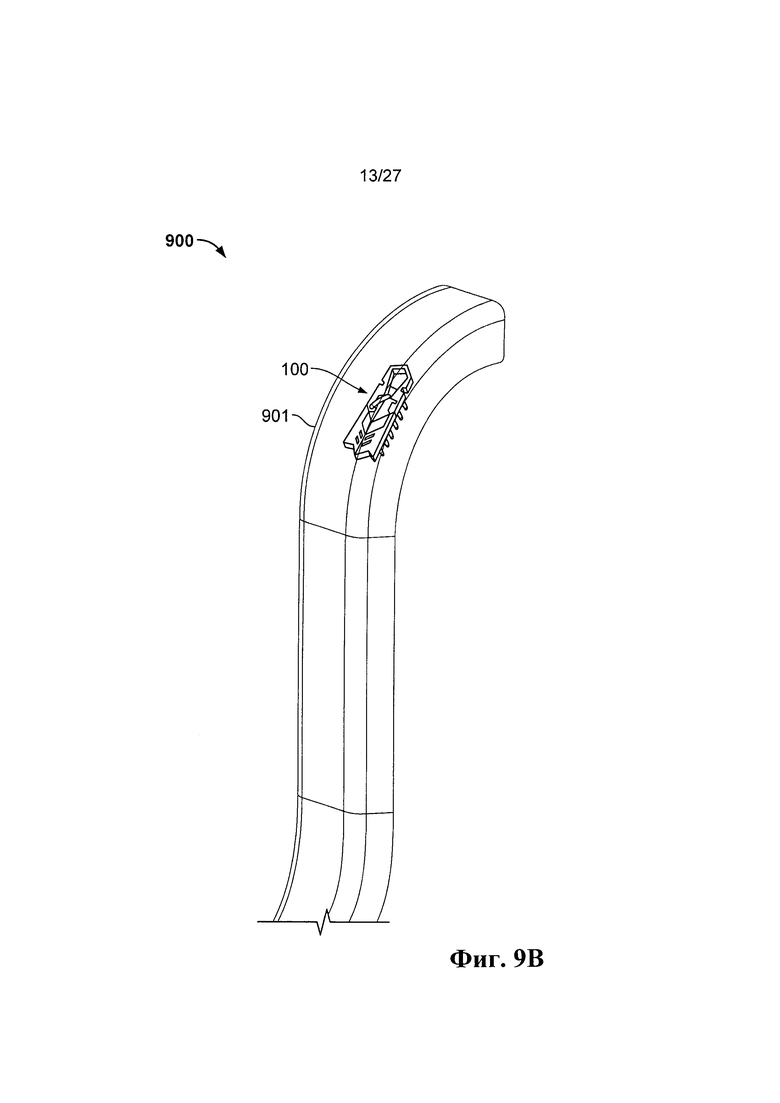
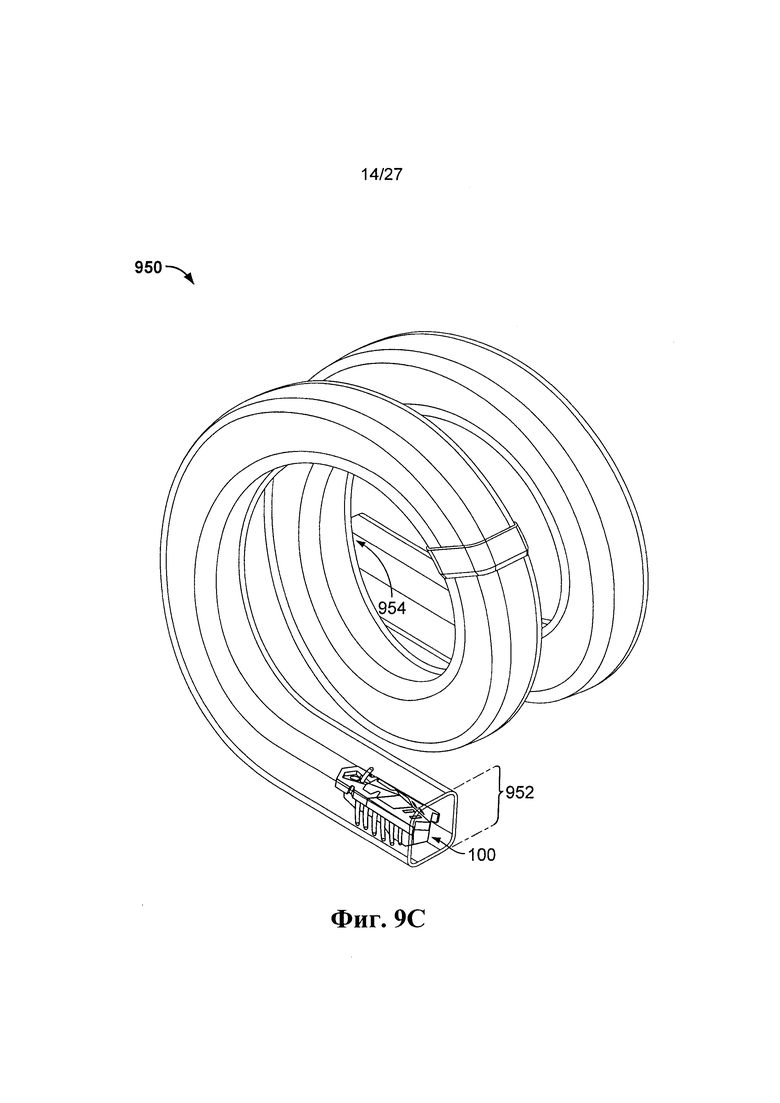
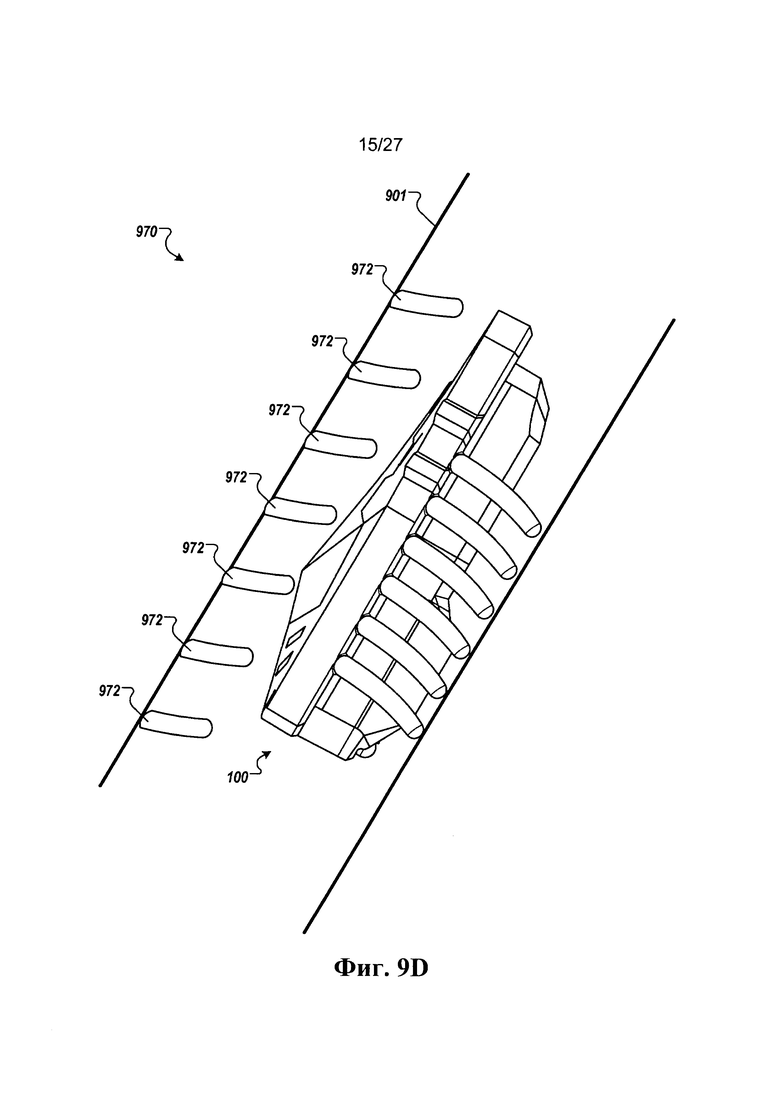
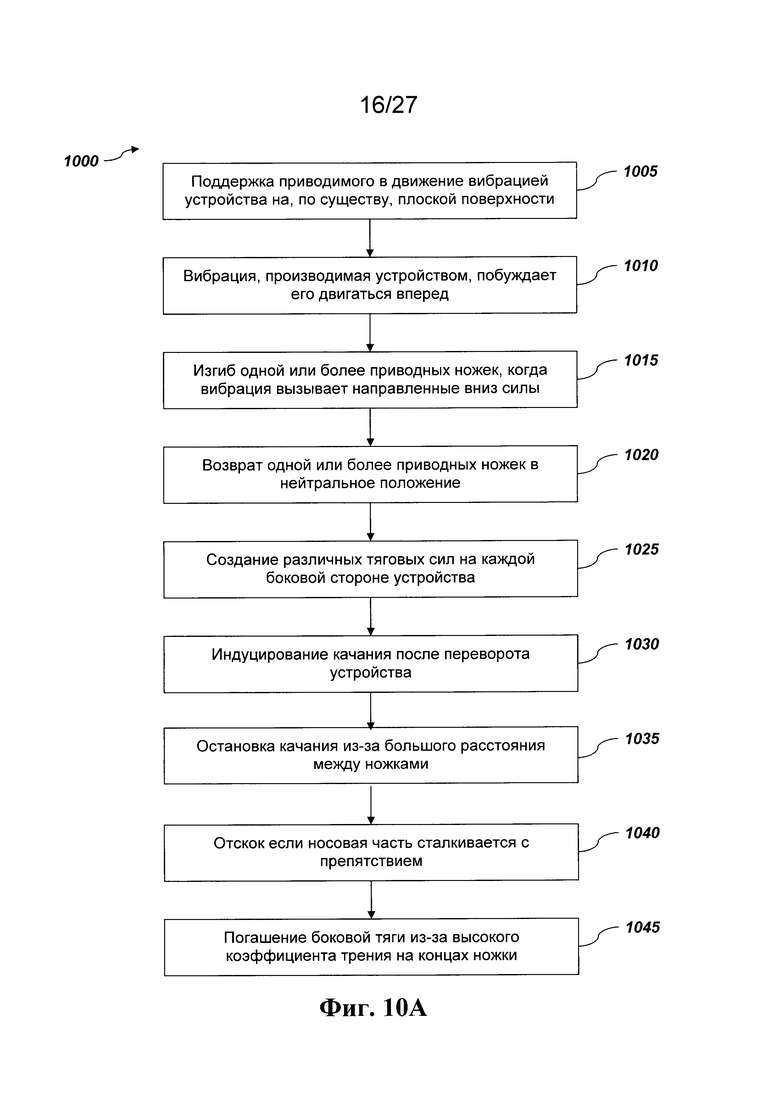
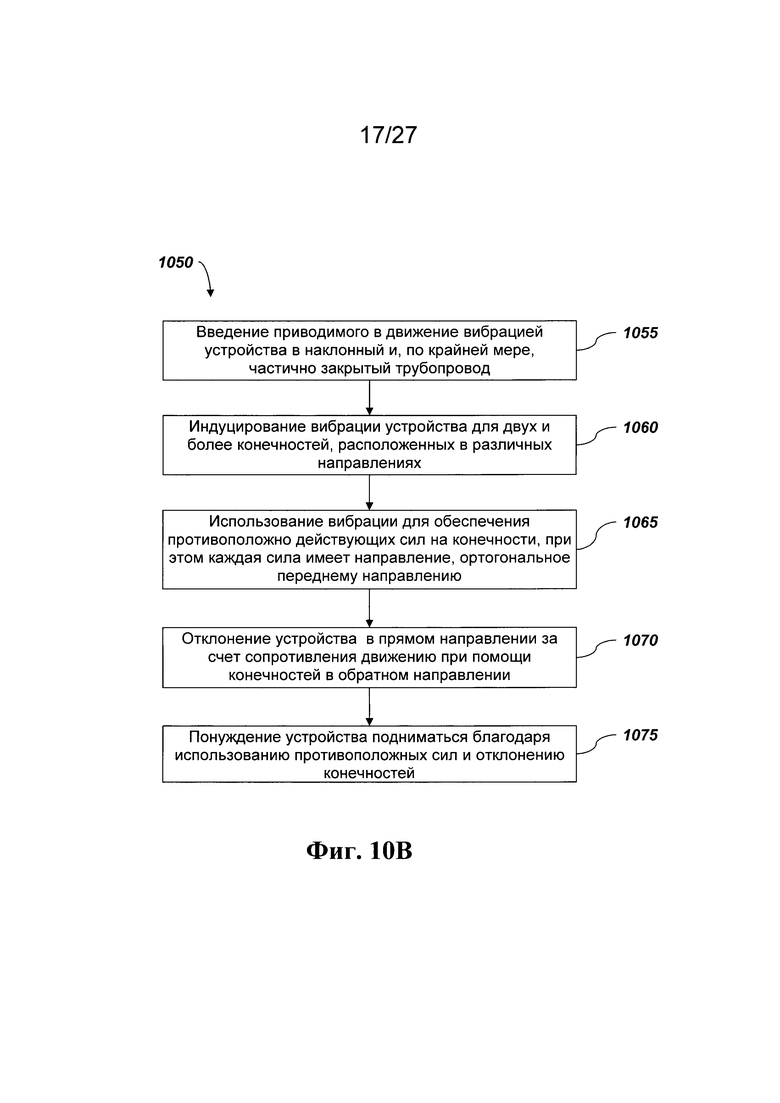
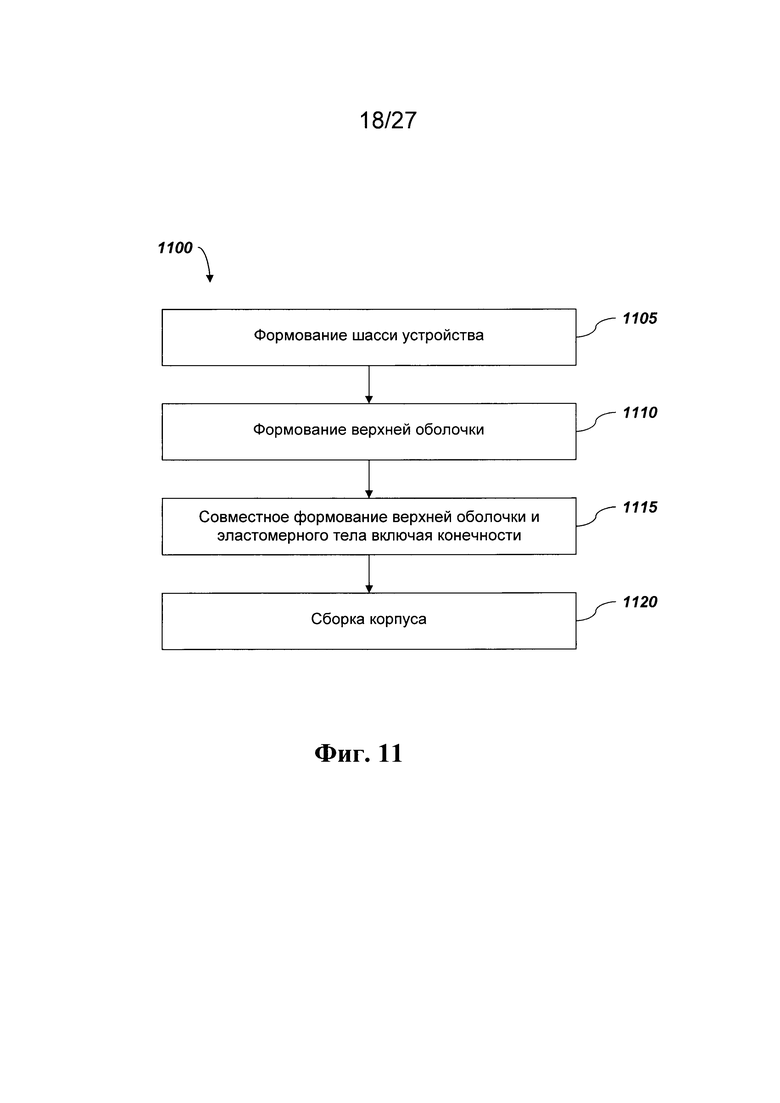
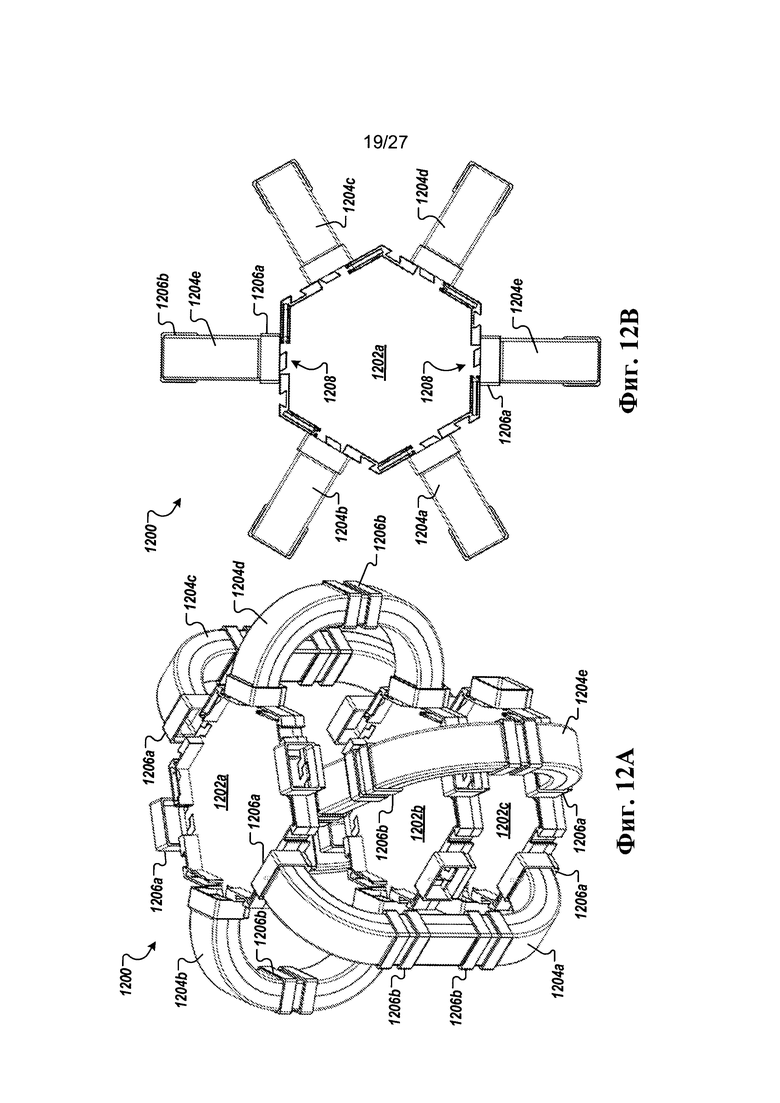
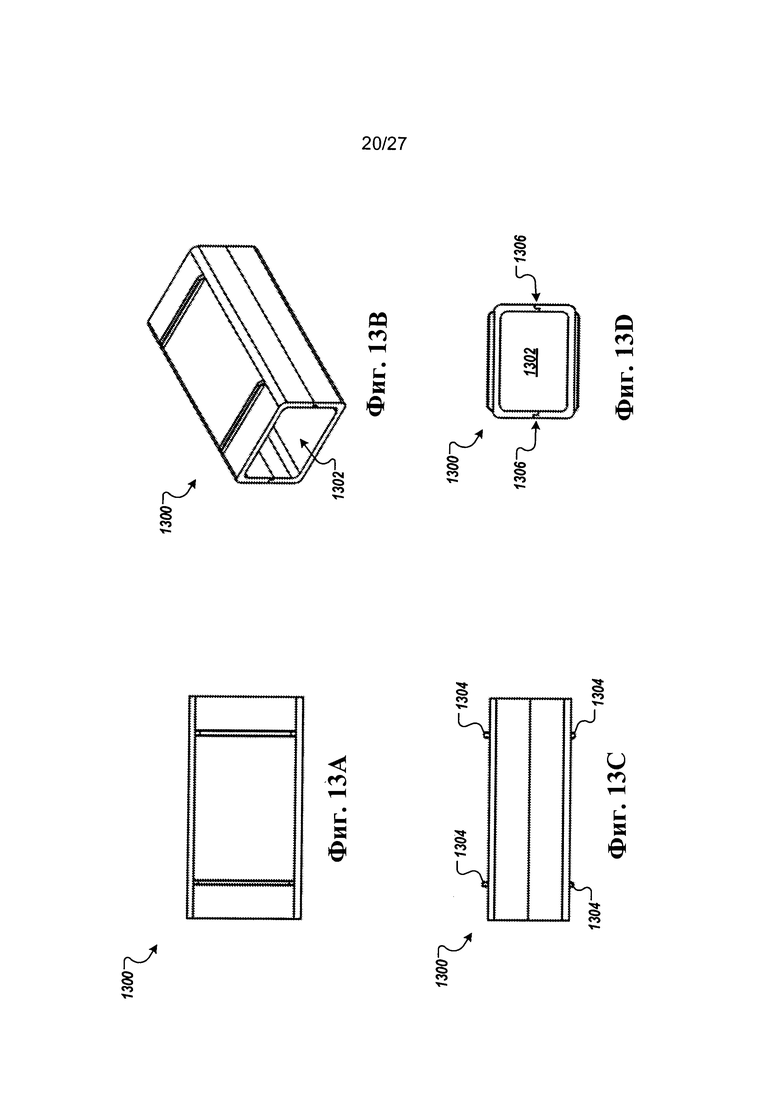
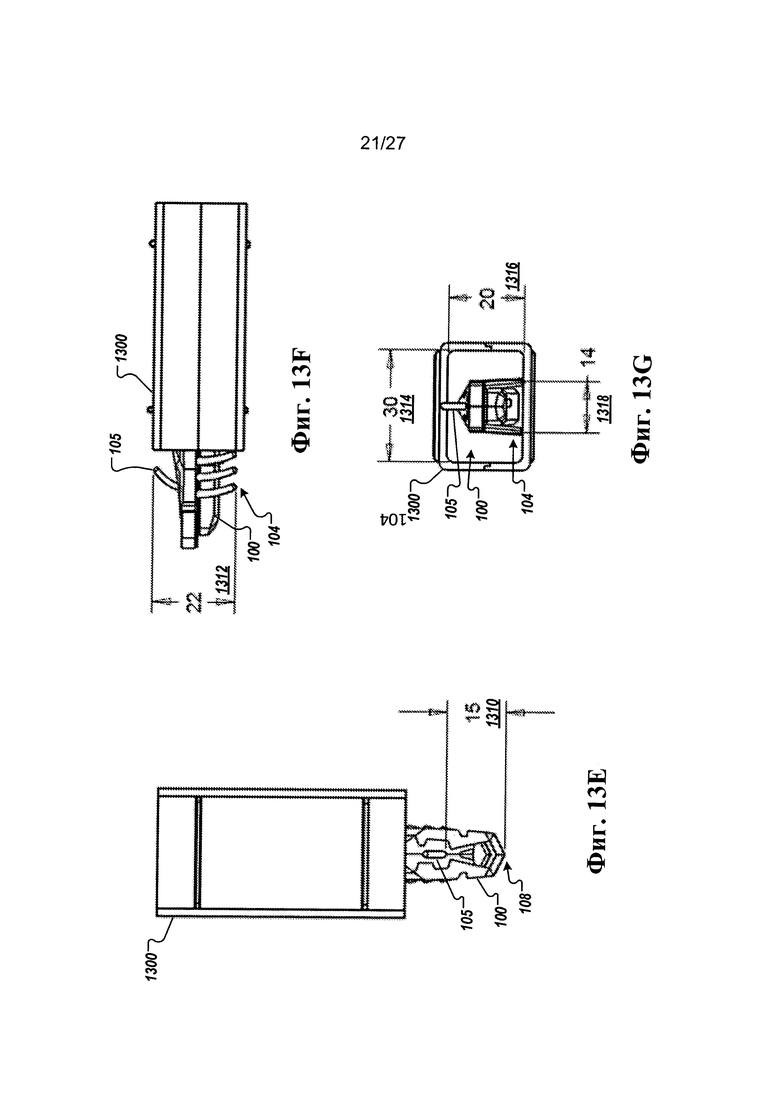
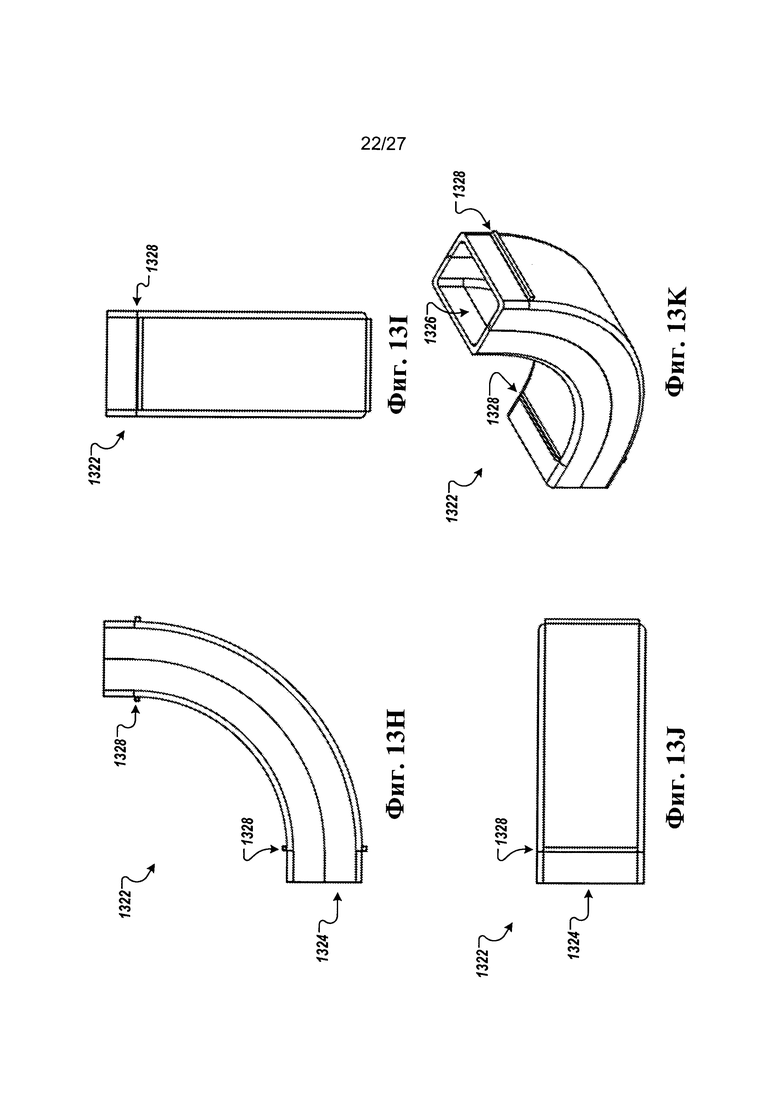
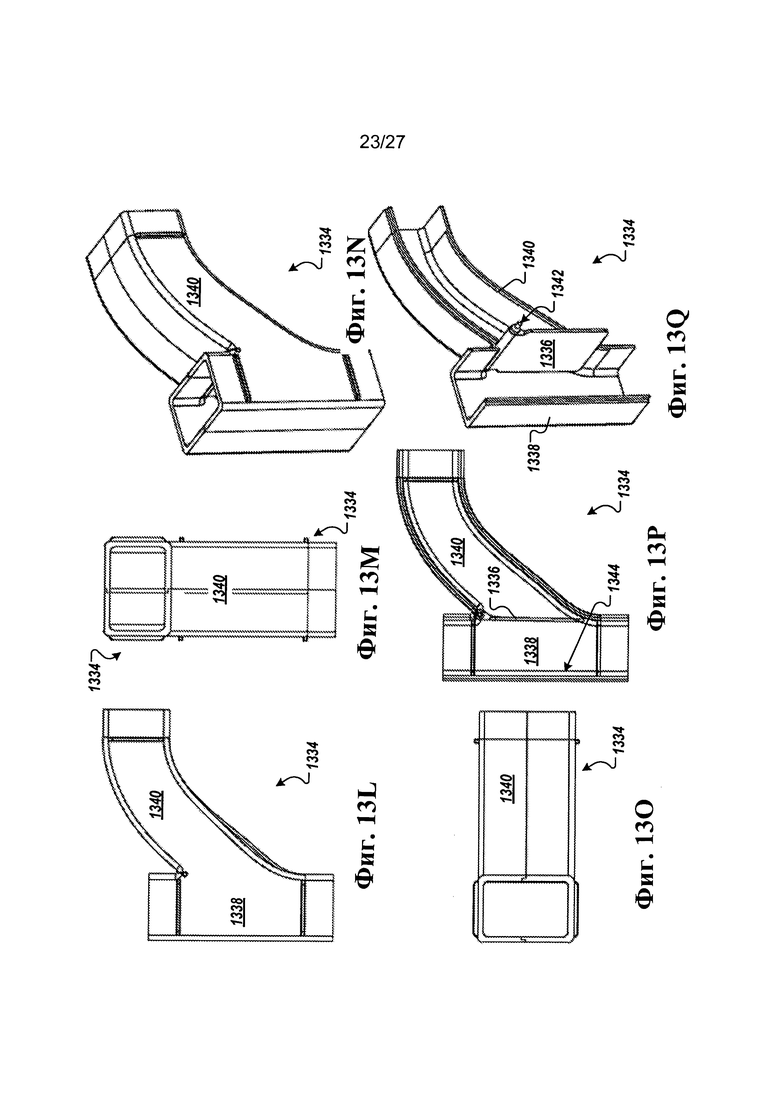
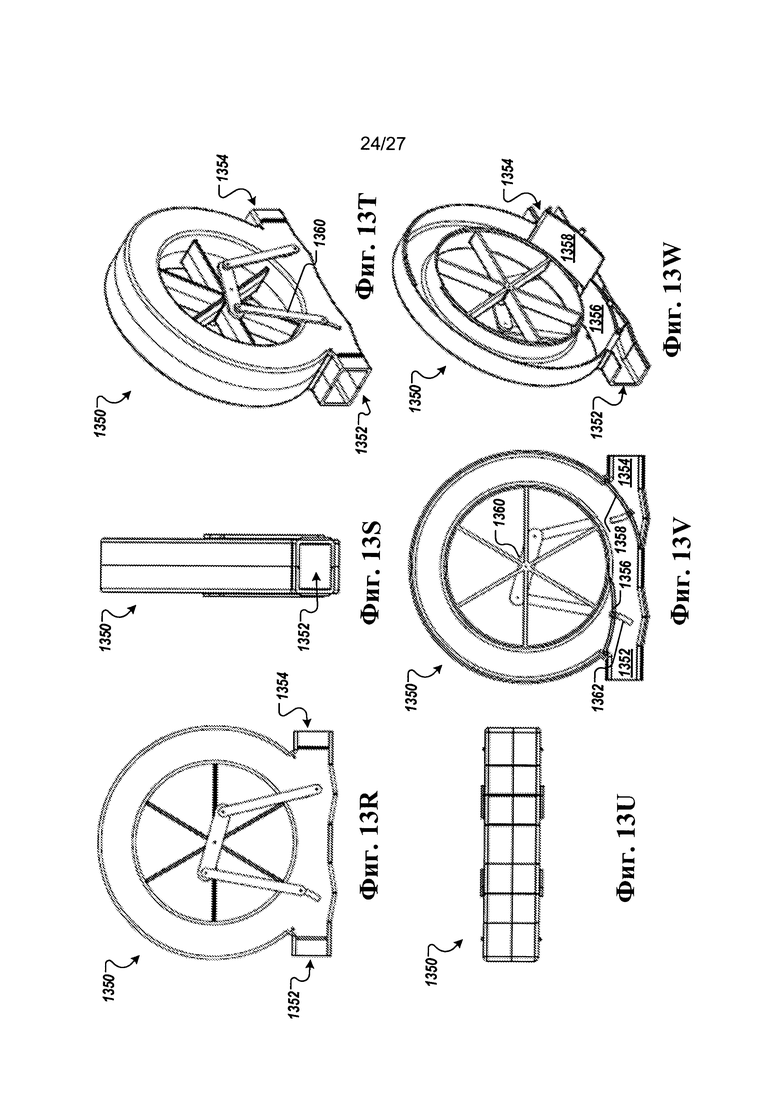
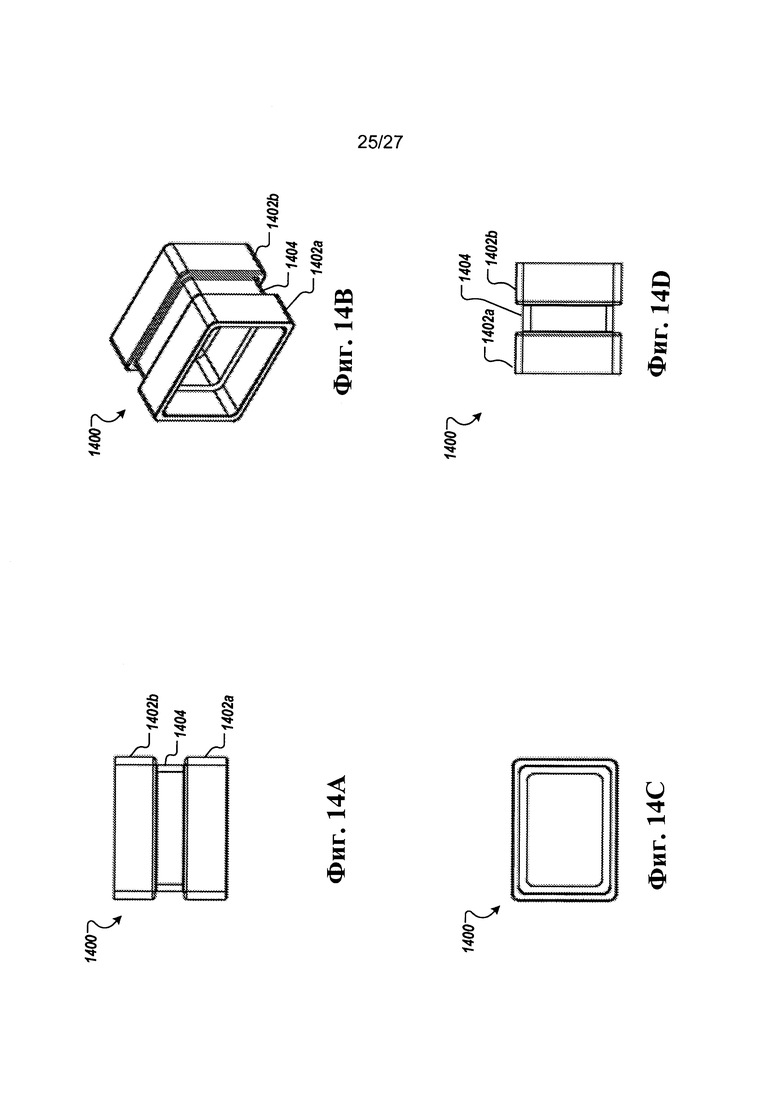
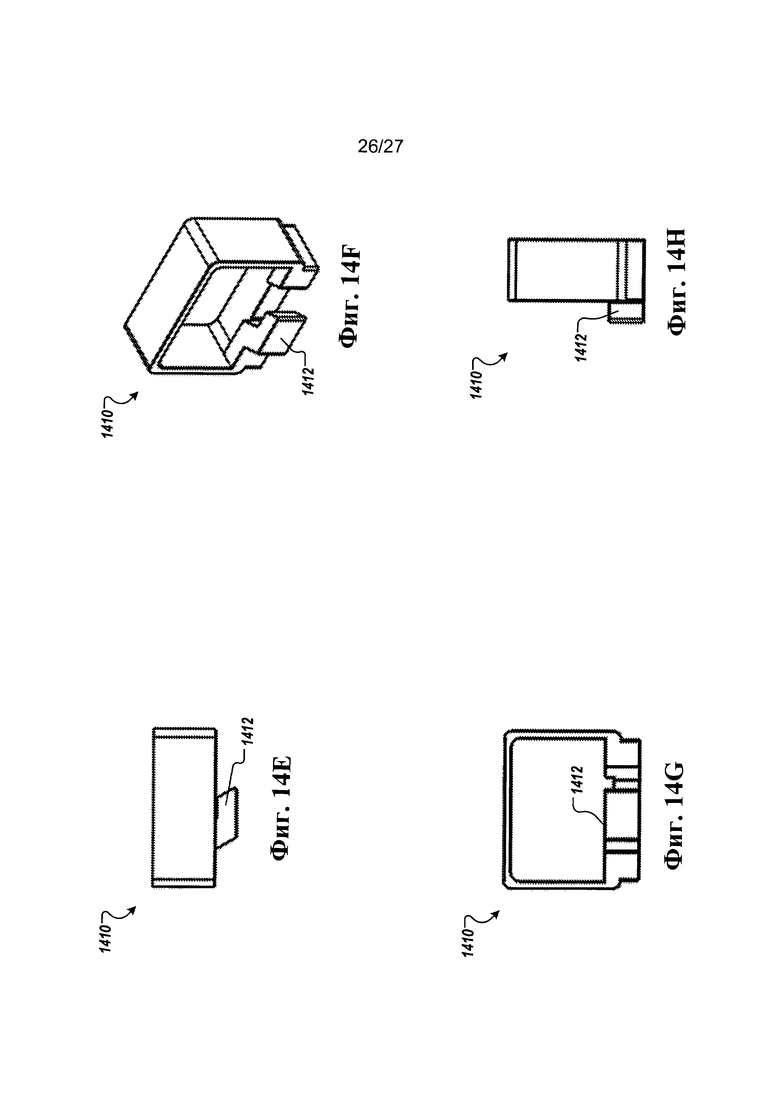
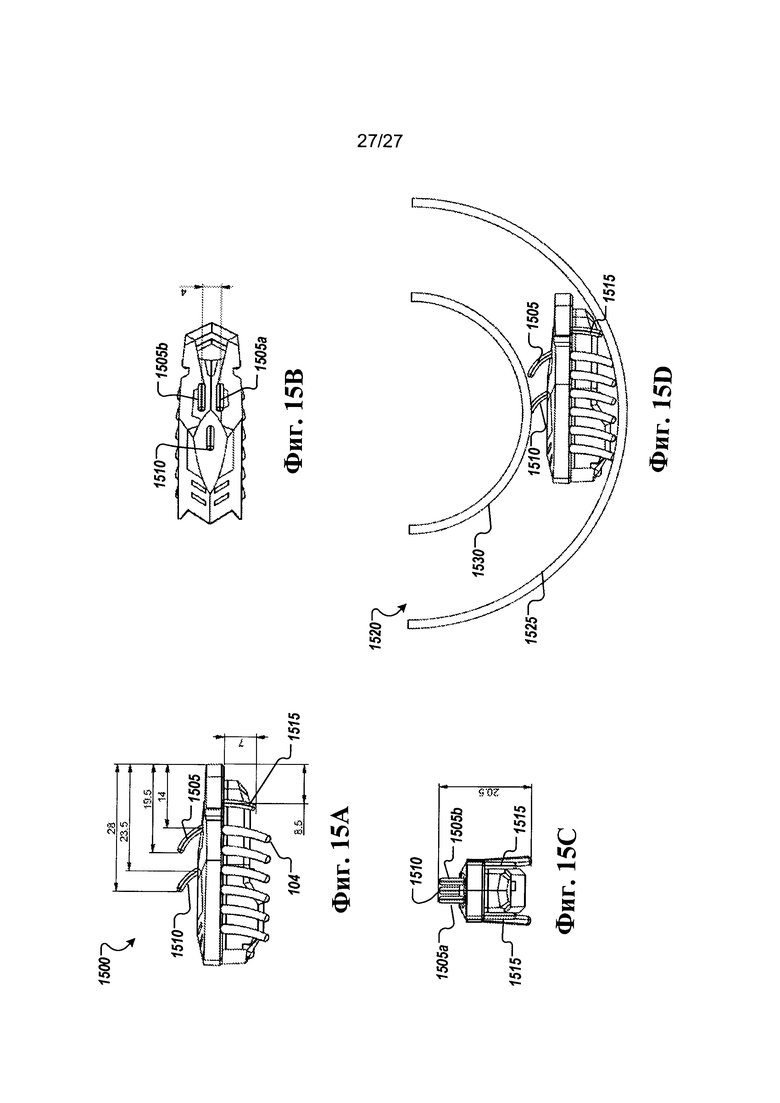
Изобретение относится к роботам, которые перемещаются на основе колебательных движений. Устройство включает корпус, двигатель вращения, расположенный внутри корпуса, вибрационный механизм и множество конечностей, основание каждого из которых располагается в корпусе, а верхушка конечностей располагается на расстоянии от корпуса. Одна или более из конечностей выполнены таким образом, чтобы способствовать перемещению устройства по поверхности в направлении вперед, как правило, определяемом продольным смещением между основанием конечности и верхушкой конечности, а конечности включают в себя две или более конечностей, расположенных таким образом, что верхушки конечностей из двух или более конечностей предназначены для контакта с противоположными поверхностями для получения результирующей силы в направлении, определяемом продольным смещением между основанием конечности и верхушкой конечности двух или более конечностей, как только вибрационный механизм заставляет устройство вибрировать. Обеспечивается возможность осуществить подъем робота, когда противоположные поверхности находятся под наклоном. 4 н. и 40 з.п. ф-лы, 59 ил.
1. Устройство с возможностью подъема, включающее: тело, вибрационный механизм, соединенный с телом; и множество конечностей, каждая из которых имеет основание конечности рядом с телом и конец конечности, находящийся на отдалении от тела, где: по крайней мере, часть из множества конечностей предназначена для того, чтобы приводить устройство в движение вдоль поверхности в прямом направлении, в общем определяемом расстоянием вдоль направления между основанием конечности и концом конечности, как только вибрационный механизм побуждает устройство к вибрации; и множество конечностей представляет собой две или несколько конечностей, расположенных таким образом, что концы двух или более конечностей предназначены для контакта с противоположными поверхностями для образования результирующей силы в направлении, в общем, определяемом расстоянием вдоль направления между основанием и концом двух или более конечностей, когда вибрационный механизм заставляет устройство вибрировать, и, по меньшей мере, одна из двух или более конечностей включает в себя одну из множества ножек, и, по меньшей мере, одна из двух или более конечностей прикреплена к верхней стороне тела.
2. Устройство с возможностью подъема по п. 1, где противоположные поверхности включают, по меньшей мере, две поверхности.
3. Устройство с возможностью подъема по п. 2, где противоположные поверхности являются противоположными поверхностями, по существу параллельными друг другу.
4. Устройство с возможностью подъема по п. 2, где, по меньшей мере, две поверхности расположены внутри закрытого трубопровода.
5. Устройство с возможностью подъема по п. 1, где результирующая сила имеет направление, по существу, определяемое расстоянием между основанием и концом для двух или более конечностей, и превышает силу притяжения, воздействующую на устройство.
6. Устройство с возможностью подъема по п. 5, где результирующая сила позволяет устройству взбираться по вертикальным противоположным поверхностям.
7. Устройство с возможностью подъема по п. 1, где каждая из двух или более конечностей в результате контакта с соответствующей поверхностью производит результирующую силу, которая включает силу, направленную, по существу, перпендикулярно соответствующей поверхности, и силу, имеющую направление, определяемое, в общем, продольным расстоянием между основанием и концом конечности.
8. Устройство с возможностью подъема по п. 7, где сила, имеющая направление, перпендикулярное соответствующей поверхности одной из двух или более конечностей, по существу, противоположна силе, направленной перпендикулярно соответствующей поверхности, по крайней мере, одной другой конечности из двух или более конечностей.
9. Устройство с возможностью подъема по п. 1, где множество конечностей представляют собой множество ножек, в общем, расположенных в первом направлении, и две или более конечностей включают первую конечность, расположенную во втором направлении, по существу, противоположном первому направлению.
10. Устройство с возможностью подъема по п. 9, где две или более конечностей дополнительно включают, по крайней мере, две ножки из множества ножек и, по крайней мере, две ножки и первая конечность предназначены для того, чтобы позволить устройству взбираться по вертикальным поверхностям, которые расположены таким образом, что концы конечностей, по крайней мере, двух ножек и конец первой конечности воздействуют переменными силами на противоположные поверхности.
11. Устройство с возможностью подъема по п. 9, где ножки расположены в два ряда, а основание конечностей ножек в каждом ряду соединяется с телом, по существу, вдоль бокового края тела.
12. Устройство с возможностью подъема по п. 11, где тело включает корпус, вращательный мотор, расположенный в корпусе, ножки, соединенные в одно целое с частью корпуса в основании ножек, и, по крайней мере, часть корпуса расположена между двумя рядами ножек.
13. Устройство с возможностью подъема по п. 1, где, по крайней мере, одна из двух или более конечностей с возможностью демонтажа прикреплена к телу.
14. Устройство с возможностью подъема по п. 1, где множество конечностей включают множество ножек, расположенных в первом направлении, и две или более конечностей, включающих:
первую конечность, расположенную во втором направлении, по существу, перпендикулярном первому направлению; и
вторую конечность, расположенную в третьем направлении, по существу, перпендикулярном первому направлению и, по существу, противоположном второму направлению.
15. Устройство с возможностью подъема по п. 1, где вибрационный механизм включает вращательный мотор, который вращает эксцентрическую нагрузку.
16. Устройство с возможностью подъема по п. 15, где множество конечностей включают множество ножек, в общем, расположенных в первом направлении; вращательный мотор имеет ось вращения, проходящую вокруг места расположения 20% центра тяжести устройства как процента от высоты устройства; и оболочку, предназначенную для упрощения вращения устройства вокруг продольного центра тяжести устройства, на основании вращения эксцентричной нагрузки, при этом устройство находится на плоской поверхности, когда ножки не направлены таким образом, что конец ножки, по крайней мере, одной из ножек на каждой боковой поверхности тела соприкасается с поверхностью уровня.
17. Устройство с возможностью подъема по п. 16, где множество ножек расположено в два ряда и ряды, по существу, параллельны оси вращения вращательного мотора и в котором, по крайней мере, некоторые концы ножек, которые соприкасаются, по существу, с плоской поверхностью, помогают предотвращать вращение устройства за счет пространства между двумя рядами ножек, когда ножки направлены таким образом, что конец ножки, по крайней мере, одной из ножек на каждой боковой стороне тела контактирует, по существу, с плоской поверхностью.
18. Устройство с возможностью подъема по п. 1, где, по крайней мере, одна из двух или более конечностей направлена вперед по отношению к продольному центру тяжести устройства.
19. Устройство с возможностью подъема по п. 1, где каждая из множества конечностей: изготовлена из гибкого материала; сформована методом литья и соединена в одно целое с телом в основании конечности.
20. Устройство с возможностью подъема по п. 1, где силы от вращения эксцентриковой нагрузки взаимодействуют с эластичной, по крайней мере, одной приводной конечностью и побуждают, по крайней мере, одну приводную конечность покинуть опорную поверхность, когда устройство перемещается вперед.
21. Устройство с возможностью подъема по п. 1, где коэффициент трения части, по крайней мере, поднабора ножки, которая взаимодействует с опорной поверхностью, является достаточным для устранения волочения в боковом направлении.
22. Устройство с возможностью подъема по п. 1, в котором эксцентричная нагрузка выполнена с размещением по направлению к переднему концу устройства относительно приводных конечностей, причем передний конец устройства является концом в направлении, которое устройство предварительно принимает для движения, когда мотор вращает эксцентричную нагрузку.
23. Устройство с возможностью подъема по п. 1, где множество конечностей сформованы заодно с, по крайней мере, частью тела.
24. Устройство с возможностью подъема по п. 1, где, по крайней мере, поднабор множества конечностей, включающий две или более конечности, изогнуты и отношение радиуса изгиба изогнутых конечностей к длине конечности составляет от 2,5 до 20.
25. Способ работы устройства с возможностью подъема, приводимого в действие при помощи вибрации, в котором, по меньшей мере, одна из двух или более конечностей включает в себя одну из множества ножек и, по меньшей мере, одна из двух или более конечностей прикреплена к верхней стороне тела, причем способ включает: индуцирование вибрации устройства, приводимого в действие при помощи вибрации, которое включает в себя тело и множество формованных ножек, каждая из которых имеет основание и верхушку, расположенную на расстоянии от основания, причем ножки присоединены к телу у основания ножки и включает в себя, по меньшей мере, одну эластомерную приводную ножку, при этом вибрация заставляет устройство двигаться вперед, как правило, за счет смещения между основанием и верхушкой, по меньшей мере, одной приводной ножки, как только устройство начинает вибрировать; и заставляет устройство подниматься, по существу, по наклонному, по меньшей мере, частично закрытому трубопроводу с использованием двух или более конечностей, чтобы обеспечить перемещение устройства вперед, а также устойчивость к движению в обратном направлении, противоположном направлению вперед, при этом две или более конечности дополнительно обеспечивают, по существу, противоположные силы на устройстве, при этом каждая противоположная сила направлена по существу ортогонально направлению вперед.
26. Способ по п. 25 дополнительно включающий в себя: удержание устройства на поверхности и подъем устройства для перемещения по поверхности вперед, как правило, за счет смещения между основанием и верхушкой, по меньшей мере, одной приводной ножки, как только устройство начинает вибрировать, причем: вибрация устройства приводит к тому, что, по меньшей мере, одна приводная ножка отклоняется в направлении, противоположном направлению вперед, без существенного скольжения, по меньшей мере, одной приводной ножки по поверхности, когда результирующие силы, воздействующие на, по меньшей мере, одну приводную ножку, направлены вниз; и упругость, по меньшей мере, одной эластомерной приводной ножки способствует отклонению вперед, по меньшей мере, одной приводной ножки, когда результирующие силы, воздействующие на, по меньшей мере, одну приводную ножку, направлены вверх.
27. Способ по п. 25, в котором индуцирование вибрации включает в себя вращение эксцентрической нагрузки.
28. Способ по п. 25, в котором две или более конечности присоединены к телу устройства.
29. Способ по п. 25, в котором две или более конечностей присоединены к трубопроводу и контактируют с телом устройства.
30. Способ по п. 25, в котором две или более конечностей включают в себя, по меньшей мере, три конечности.
31. Способ по п. 25, в котором две или более конечностей выполнены с возможностью подъема устройства по вертикальному трубопроводу.
32. Способ по п. 31, в котором две или более конечностей прикреплены к телу устройства и трубопровод, тело устройства, и две или более конечностей сконфигурированы таким образом, что каждая из двух или более конечностей находится в постоянном в контакте с внутренней поверхностью трубопровода в течение достаточного периода времени для выполнения движения вперед.
33. Способ по п. 32, в котором вибрация устройства вызывает отклонение, по меньшей мере, одной из двух или более конечностей в направлении, противоположном направлению, вперед без существенного скольжения, по меньшей мере, одной конечности на соответствующей внутренней поверхности трубопровода, когда результирующие силы, воздействующие от, по меньшей мере, одной конечности, направлены к соответствующей внутренней поверхности; и упругость, по меньшей мере, одной конечности вызывает отклонение, по меньшей мере, одной конечности в направлении вперед, когда результирующие силы, воздействующие от, по меньшей мере, одной конечности, вызывают отталкивание конечности от соответствующей внутренней поверхности.
34. Устройство с возможностью подъема, включающее в себя: тело; вибрационный механизм, присоединенный к телу, и множество конечностей, основание каждой из которых прилегает к телу, и верхушку конечности, которая находится на расстоянии от тела, причем, по меньшей мере, подмножество из множества конечностей выступают из тела и расположены таким образом, что каждая из конечностей в подмножестве контактирует с одной из множества, по существу, параллельных поверхностей, и способствуют подъему устройства вверх по, по существу, наклоненной поверхности, когда вибрация, вызванная вибрационным механизмом, приводит к, по меньшей мере, попеременному контакту конечностей в подмножестве с, по существу, параллельными поверхностями, и в котором, по меньшей мере, одна из двух или более конечностей включает в себя одну из множества ножек и, по меньшей мере, одна из двух или более конечностей прикреплена к верхней стороне тела.
35. Устройство с возможностью подъема по п. 34, в котором вибрация, индуцированная вибрационным механизмом, вызывает удержание, по меньшей мере, постоянного контакта, по меньшей мере, одной из конечностей в подмножестве с одной из множества, по существу, параллельных поверхностей и, по меньшей мере, одной из конечностей в подмножестве, что вызывает попеременный контакт и уход с противоположной поверхности из множества, по существу, параллельных поверхностей.
36. Устройство с возможностью подъема по п. 34, в котором, по меньшей мере, одна из конечностей в подмножестве поддерживает, по меньшей мере, постоянный контакт с одной из множества, по существу, параллельных поверхностей и, по меньшей мере, одна из конечностей в подмножестве имеет, по существу, постоянный контакт с противоположной поверхностью из множества, по существу, параллельных поверхностей.
37. Устройство с возможностью подъема по п. 34, в котором контакт с каждой из, по меньшей мере, двух конечностей в подмножестве с соответствующей одной из множества поверхностей обеспечивает, по существу, противоположные силы, которые облегчают подъем устройства по, по существу, наклонной поверхности.
38. Устройство с возможностью подъема по п. 37, в котором подмножество множества конечностей выполнены с возможностью создания силы в направлении вперед, как правило, за счет продольного смещения основания конечности, которая прилегает к телу, и верхушки конечности, которая находится на расстоянии от тела, когда вибрационный механизм приводит к тому, что конечности вызывают, по существу, постоянный контакт с двумя параллельными поверхностями.
39. Устройство с возможностью подъема по п. 38, в котором каждая из конечностей в подмножестве является изогнутой в направлении, по существу, противоположном направлению вперед; и выполнена из эластомерного материала.
40. Система, включающая в себя: наклонный трубопровод, имеющий две, по существу, параллельные противоположные поверхности; автономное устройство с возможностью подъема, содержащее: тело; вибрационный механизм, прикрепленный к телу; и множество конечностей, основание каждой из которых расположено прилегающим к телу, а верхушка конечности расположена на расстоянии от тела, причем: по меньшей мере, одна из двух или более конечностей включает в себя одну из множества ножек и, по меньшей мере, одна из двух или более конечностей прикреплена к верхней стороне тела; по меньшей мере, часть из множества конечностей вызывает перемещение устройства по поверхности вперед, как правило, за счет продольного смещения между основанием конечности и верхушкой конечности, когда вибрационный механизм заставляет устройство вибрировать; и множество конечностей включают в себя две или более конечностей, расположенных таким образом, что верхушки двух или более конечностей выполнены с возможностью контактирования с, по существу, двумя параллельными противоположными поверхностями с получением результирующей силы в направлении, в общем, определенном продольным смещением между основанием конечности и верхушкой конечности для двух или более конечностей, когда вибрационный механизм заставляет устройство вибрировать, причем результирующая сила заставляет автономное устройство подниматься по наклонному трубопроводу.
41. Система по п. 40, в которой трубопровод содержит трубу.
42. Система по п. 40, в которой трубопровод имеет ширину, достаточную, чтобы позволить двум из автономных устройств проходить мимо друг друга.
43. Система по п. 40, в которой трубопровод включает в себя, по меньшей мере, один прямой компонент, изогнутый компонент, компонент пересечения или разъем.
44. Система по п. 40, дополнительно включающая в себя множество компонентов трубопровода, которые могут соединяться вместе для создания среды обитания.
| US 6450104 B1, 17.09.2002 | |||
| US 4183173 A, 15.01.1990 | |||
| US 20050288112 A1, 29.12.2005 | |||
| US 4674949 A, 23.06.1987 | |||
| US 7339340 B2, 04.03.2008. |

