ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к способам и системам автоматизированной сортировки, в частности, но не исключительно, к автоматизированной сортировке фруктов и овощей. Область применения изобретения также простирается, но без ограничения, на способы и системы для использования в отделении отходов, в сортировке и переработке, и при разделении и сортировке твердого гранулированного сырья, например минеральных руд.
УРОВЕНЬ ТЕХНИКИ
В некоторых оптических системах автоматизированной сортировки для фруктов и овощей сортируемый продукт выгружается от конца горизонтальной конвейерной ленты. Сортируемый продукт оптически сканируется при нахождении на конвейерной ленте и/или при сбрасывании от конца ленты, и решение о принятии/изъятии делается на основании сканирования(-ий). Если продукт должен быть изъят, то он будет направлен от его нормальной пролетной траектории и отклонен в отклоняющий желоб. Если он должен быть принят, то он продолжит следовать по своей нормальной пролетной траектории, непрерывно до приемного желоба. Это представляет собой характеристику основной двухходовой операции сортировки.
Практически, часто требуются более сложные операции сортировки. Может оказаться необходимым сортировать продукты больше чем по двум категориям, например, "Класс А", "Класс B" и "Мусор", или альтернативно, "Прием", "Переработка" и "Мусор". Первоначально, эти более сложные операции сортировки выполнялись прохождением одного из двух потоков от первой двухходовой сортировки через второй сортировщик. Это требовало две различные системы сортировки (два оптических сканера, две принимающих решения электроники, два устройства отклонения, два набора систем транспортировки и т.д.). В дополнение к стоимости, связанной с продуктами, проходящими две полные операции сортировки, это также приводило к возможности нежелательного повреждения продукта.
В текущем уровне техники, как показано на Фиг. 1, единственное устройство 101 отклонения используется для достижения трехходовой сортировки при наличии двух устройств 102, 103 отклонения (или два ряда таких устройств отклонения), расположенных каскадно один за другим. Единственный оптический сканер и аппарат 104 принятия решения используется для принятия решения трехходовой сортировки. Когда продукт 110 проходит первое устройство 102 отклонения, выполняется начальная сортировка, причем продукты, классифицируемые как относящиеся к первой категории, - "Мусор", например, - отклоняются вниз на выделенный канал 107, оставляя продукты, проходящие на второе устройство 103 отклонения. Когда продукт 110 проходит второе устройство отклонения, выполняется вторая сортировка, причем продукты, классифицируемые как относящиеся ко второй категории ("Класс B" например), отклоняются во второй выделенный канал 108, оставляя третью категорию продуктов ("Класс А", например) для прохождения на неотклоняемый третий канал 109.
Вместо необходимости в двух полных сортировщиках, единственный элемент, который дублируется, - это устройство отклонения. Однако при этой компоновке остаются некоторые недостатки. Должна быть предоставлена возможность падения продуктов с большей высоты для их подачи на два устройства отклонения последовательно. Это увеличивает риск повреждения продукта. Кроме того, когда продукты достигают второго устройства отклонения, они проходят дополнительное расстояние падения, так, что становится менее точным контроль и предсказуемость их местонахождения. Это уменьшает точность второй операции сортировки, увеличивая количество "пропущенных видов" (то есть, продуктов, которые были выбраны для отклонения, но которые фактически были пропущены устройством отклонения вследствие рассинхронизации попадания продукта в устройство отклонения). Это также уменьшает точность второй операции сортировки, увеличивая количество "случайных видов" (то есть, продуктов, которые не были выбраны для отклонения, но которые были фактически отклонены устройством отклонения вследствие отводящего действия, совпадающего с рассинхронизированным попаданием продукта в устройство отклонения). В дополнение к этим проблемам, хотя стоимость такого устройства ниже, чем для такового с двумя полными сортировщиками, все же возникают затраты, связанные с наличием двух полных устройств отклонения. Кроме того, эта конфигурация оказывается сложной и поэтому подвержена механической поломке.
Патент США 7,041,926 направлен на способ и систему для отделения камней гравийных смесей по одному или нескольким заданным параметрам. Это достигается пропусканием гравийной смеси через напорную трубу, которая проходит через множество соединений, каждое из которых соединяется с тремя выходами: первый распределительный рукав, второй распределительный рукав и продолжение напорной трубы. Пара независимо сочленяемых отводящих устройств располагаются в каждом соединении, и каждая пара отводящих устройств является совместно сочленяемой так, что только один из трех выходов в соединении будет открыт в любое данное время. Хотя эта компоновка позволяет сложную сортировку в единственной точке, все же оказывается необходимым поддерживать стоимость и механическую сложность двух устройств отклонения. Кроме того, эта компоновка требует координации движения обоих независимо сочленяемых отводящих устройств, вдобавок к сложности полной системы.
Соответственно, имеется потребность в улучшенных способах и системах автоматической сортировки по множественным классам.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В соответствии с настоящим изобретением предоставляется устройство отклонения для использования в пределах системы для сортировки дискретных объектов, устройство отклонения, содержащее, по меньшей мере, одно отводящее устройство, выполненное с возможностью изменения траектории объекта; и приводное средство, выполненное с возможностью приведения в движение отводящего устройства, по меньшей мере, между тремя дискретными положениями так, что при использовании, по меньшей мере, один из упомянутых дискретных объектов проходит вдоль одного из трех каналов.
Предпочтительно, по меньшей мере, одно отводящее устройство выполнено с возможностью вхождения в контакт упомянутого, по меньшей мере, одного объекта, когда он находится, по меньшей мере, в двух из упомянутых, по меньшей мере, трех дискретных положений.
Устройство отклонения может быть выполнено с возможностью сортировки объектов, в то время как упомянутые объекты падают.
Предпочтительно, по меньшей мере, одно отводящее устройство содержит лопатку.
В альтернативном варианте осуществления, по меньшей мере, одно отводящее устройство может содержать гибкий желоб, имеющий ввод и подвижный вывод, приводимый в движение между упомянутыми, по меньшей мере, тремя дискретными положениями.
Приводное средство может содержать трехпозиционный пневматический цилиндр. Это выгодно потому, что он механически сравнительно прост по сравнению с альтернативным приводным средством. Приводное средство может альтернативно содержать электрический двигатель.
Настоящее изобретение дополнительно предоставляет набор отклонения, содержащий множество устройств отклонения, как определено выше. Предпочтительно, каждое устройство отклонения является независимо активируемым.
Настоящее изобретение дополнительно предоставляет систему сортировки, содержащую, по меньшей мере, одно устройство отклонения, как описано выше.
Отводящее устройство упомянутого, по меньшей мере, одного устройства отклонения может быть размещено, по меньшей мере, в двух, по меньшей мере, из трех положений для отвода объекта в соответственный отклоняющий канал.
Настоящее изобретение дополнительно предоставляет способ сортировки дискретных объектов, содержащий этапы i) позиционирования отводящего устройства в одном из трех дискретных положений; и ii) изменение траектории, по меньшей мере, одного из упомянутых дискретных объектов, когда упомянутое отводящее устройство располагается в двух из упомянутых трех дискретных положений.
Этап ii) может содержать отведение упомянутого дискретного объекта упомянутым отводящим устройством.
Этап ii) предпочтительно содержит изменение траектории, по меньшей мере, одного из упомянутых дискретных объектов, когда упомянутый, по меньшей мере, один дискретный объект падает.
Предпочтительно, этап ii) содержит, изменение траектории, по меньшей мере, одного из упомянутых дискретных объектов в один из двух соответственных отклоняющих каналов.
Способ может дополнительно содержать изменение положения отводящего устройства между двумя из упомянутых трех дискретных положений между прохождением последовательных дискретных объектов.
Также предоставляется компьютерная программа, содержащая команды программы для стимуляции компьютерной программы на выполнение вышеупомянутого способа, которая может быть реализована на записываемой среде, несущем сигнале или постоянном запоминающем устройстве.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Изобретение будет лучше понято из нижеследующего описания его варианта осуществления, приведенного только в качестве примера, в связи с сопровождающими чертежами, на которых:
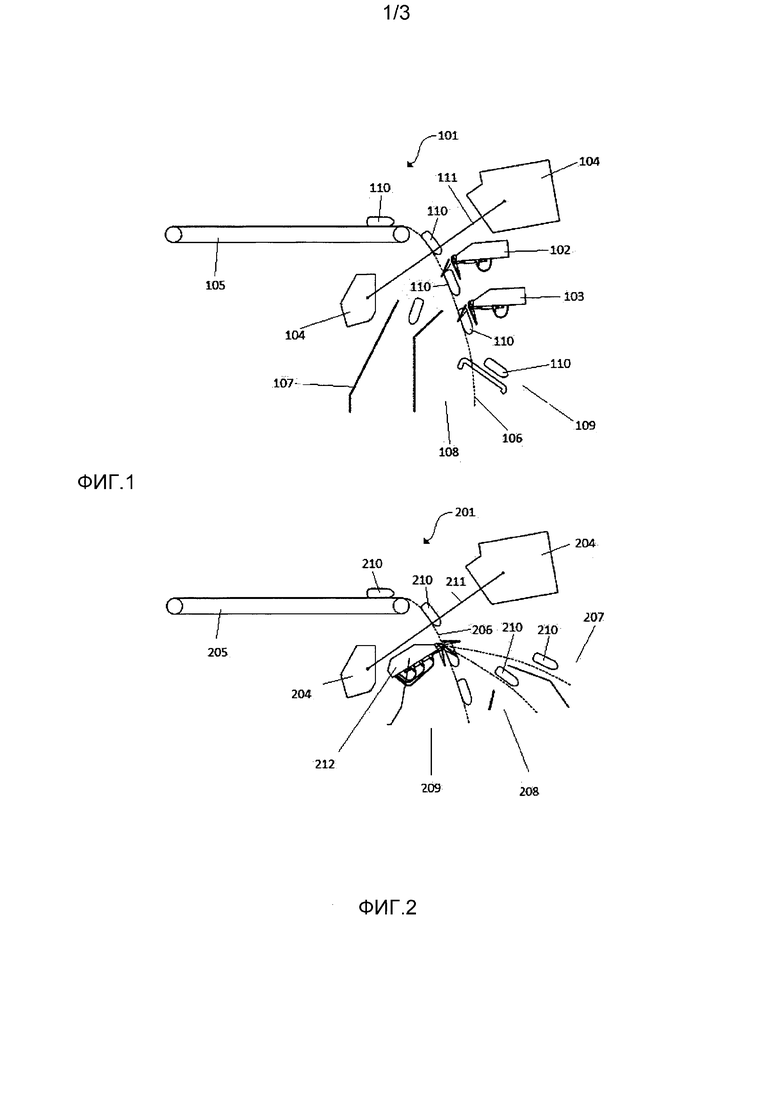
Фиг. 1 изображает вид сбоку трехходовой системы сортировки, использующей два последовательных двухходовых устройства отклонения в соответствии с вариантом осуществления техники предшествующего уровня.
Фиг. 2 - вид сбоку трехходовой системы сортировки, использующей единственное трехходовое устройство отклонения в соответствии с вариантом осуществления настоящего изобретения.
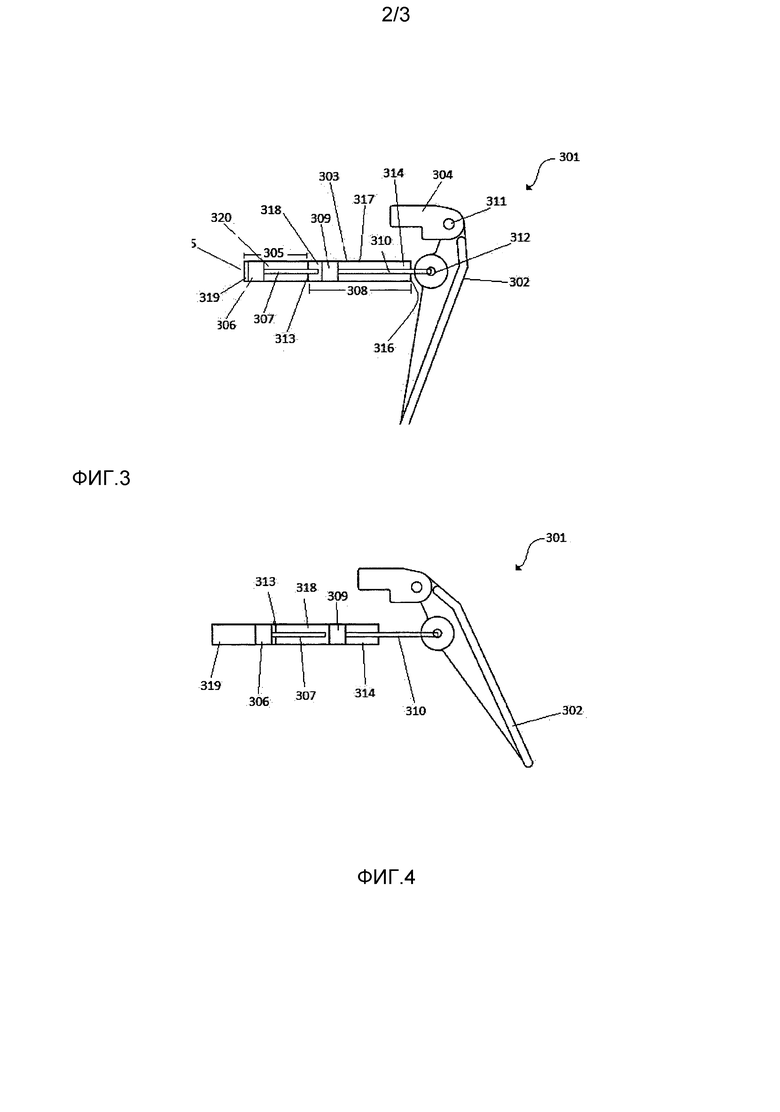
Фиг. 3 - вид сбоку трехходового устройства отклонения варианта осуществления настоящего изобретения в полностью втянутом положении.
Фиг. 4 - вид сбоку трехходового устройства отклонения варианта осуществления настоящего изобретения в наполовину выдвинутом, или "среднем", положении.
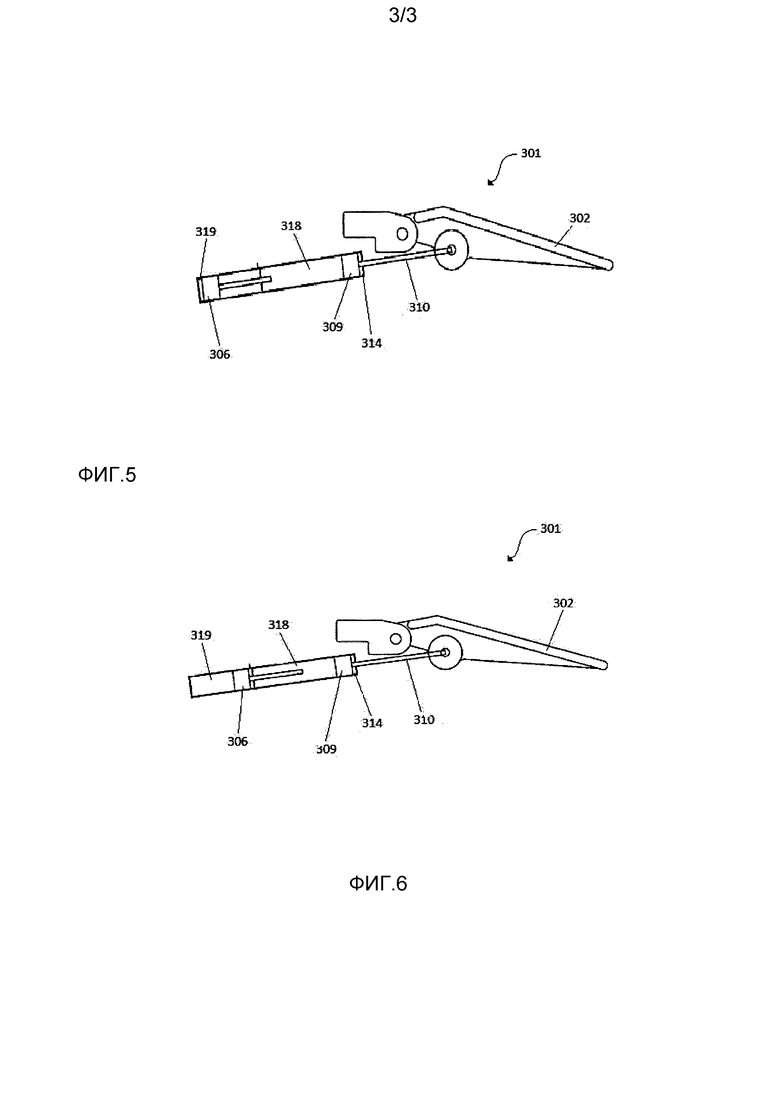
Фиг. 5 - вид сбоку трехходового устройства отклонения варианта осуществления настоящего изобретения в полностью выдвинутом положении.
Фиг. 6 - вид сбоку трехходового устройства отклонения варианта осуществления настоящего изобретения в полностью выдвинутом положении, причем трехпозиционный цилиндр находится в альтернативном состоянии относительно изображенного на Фиг. 5.
ПОДРОБНОЕ ОПИСАНИЕ
Как описано выше, Фиг. 1 изображает трехходовую систему 101 сортировки в соответствии с системой предшествующего уровня техники. Эта система для сортировки объектов 110 содержит конвейер 105, оптический аппарат 104, пару двухходовых устройств 102, 103 отклонения и три взаимоисключающих канала 107, 108 и 109. Сортируемые объекты 110 переносятся вдоль конвейера 105 и имеют возможность падать в конце конвейера 105, где они переходят в свободное падение. Поскольку масса всех данных сортируемых объектов обычно следует известному распределению, и поскольку конвейер работает на заданной скорости, оказывается возможным оценить траекторию 106 объектов, как только они начинают свободное падение. Каналы 107, 108 и 109 размещены ниже конвейера так, что неотводимый свободно падающий объект пойдет по каналу 109, тогда как отводимый свободно падающий объект пойдет по каналу 107 или 108 в зависимости от степени его отведения.
Оптический аппарат 104, имеющий поле обзора 111, располагается вдоль предполагаемой траектории 106 так, что свободно падающие объекты вначале пройдут через поле обзора 111. Оптический аппарат 104 может сканировать объект, который проходит через поле обзора 111, и выполняет в реальном времени определение того, должен ли сканируемый объект быть отсортирован в канал 107, 108 или 109. Оптический аппарат 104 может затем передать соответствующие команды на устройства 102, 103 отклонения, чтобы гарантировать, что сканируемый объект сортируется в определенный канал. Устройства 102, 103 отклонения гарантируют, что сканируемый объект сортируется в соответствии с тем, как будет описано ниже.
Кроме того, вдоль предполагаемой траектории l06 (то есть, после оптического аппарата) первое двухходовое устройство 102 отклонения располагается так, что когда оно во втянутом положении, объект в свободном падении пройдет мимо устройства 102, его траектория не отклонится и перейдет в направлении канала 109. Устройство 102 отклонения, будучи выдвинутым в соответствующее время в течение свободного падения объекта, отведет траекторию объекта так, что он пойдет по каналу 107. Команды от оптического аппарата 104, определяя, что объект должен быть отсортирован по каналу 107, заставят устройство отклонения выдвинуться в такой момент времени, чтобы гарантировать, что объект пойдет по каналу 107. Если оптический аппарат определяет, что объект должен направляться по каналу 108 или 109, то он заставит устройство отклонения оставаться втянутым. Как только может быть оценена траектория объектов в свободном падении, то может быть оценено положение объекта по этой предполагаемой траектории в данный момент времени. Также, оказывается возможным оценить, когда первое двухходовое устройство отклонения должно быть выдвинуто, чтобы гарантировать, что объект отклонен по каналу 107.
Еще дальше по предполагаемой траектории 106 (то есть, после оптического аппарата и первого устройства отклонения) расположено второе двухходовое устройство 103 отклонения. Только те объекты, которые прошли мимо первого устройства отклонения неотведенными (то есть те, которые все еще продолжают движение в направлении канала 109 и не были отведены по каналу 107), будут иметь свои траектории, отводимые вторым устройством отклонения. Когда второе устройство отклонения находится во втянутом положении, отклоняемый объект, проходящий мимо устройства 103, пройдет с его неотведенной траекторией и пойдет по каналу 109. При выдвигании в соответствующее время в течение свободного падения такого объекта устройство 103 отклонения отведет траекторию объекта так, что он будет направлен по каналу 108. Как с первым устройством 102 отклонения, оптический аппарат 104 отправит команды на устройство 103 отклонения, если свободно падающий объект должен быть отведен по каналу 108, и при этом устройство 103 отклонения будет выдвинуто в соответствующее время.
При этом эта трехходовая система сортировки предшествующего уровня техники достигает возможности трехходовой сортировки, размещая каскадную пару двухходовых устройств 102, 103 отклонения вдоль траектории свободного падения объектов 110, которые падают в конце конвейера 105.
Обращаясь теперь к варианту осуществления изобретения, на Фиг. 2 показана трехходовая система 201 сортировки для сортировки объектов 210, содержащая конвейер 205, оптический аппарат 204, единственное трехходовое устройство 212 отклонения и три взаимоисключающих канала 207, 208 и 209. Как и с системой на Фиг. 1, сортируемые объекты 210 переносятся по конвейеру 205 и имеют возможность падать в конце конвейера 205, где они начинают свободное падение. Как предварительно описано, траектория 206 свободно падающих объектов может быть оценена. Каналы 207, 208 и 209 размещены ниже конвейера так, что неотведенный свободно падающий объект пойдет по каналу 209, тогда как отведенный свободно падающий объект пойдет по каналу 207 или 208 в зависимости от степени, до которой он отведен.
Оптический аппарат 204 располагается по предполагаемой траектории 206 и сконфигурирован аналогично оптическому аппарату 104 для системы 101 так, что свободно падающие объекты сначала пройдут через поле обзора 211 оптического аппарата 204, где они могут быть отсканированы. Затем может быть выполнено определение в реальном времени относительно того, должен ли сканируемый объект быть отсортирован в канал 207, 208 или 209, и соответствующие команды могут быть переданы затем на трехходовое устройство 212 отклонения, чтобы гарантировать, что сканируемый объект отсортирован в определенный канал. Трехходовое устройство 212 отклонения может быть поддержано во втянутом положении или быть выдвинутым до одного из двух различных выдвинутых положений - "среднее" выдвинутое положение и "полное" выдвинутое положение. Трехходовое устройство 212 отклонения гарантирует, что сканируемый объект будет отсортирован соответственно, как будет описано подробнее в связи с Фиг. 3, 4, 5 и 6.
Трехходовое устройство 212 отклонения расположено по предполагаемой траектории 206 так, что оно расположено дальше вдоль траектории, чем оптический аппарат 204. Устройство 212 устанавливается так, что когда устройство 212 находится во втянутом положении, объект в свободном падении пройдет мимо устройства 212, следуя неотведенной траектории. Дополнительно, устройство 212 устанавливается так, что когда устройство 212 находится в "среднем" или "полном" выдвинутых положениях, объект в свободном падении будет отведен от его нормальной траектории. При выдвигании в "среднее" положение в соответствующее время в течение свободного падения объекта трехходовое устройство 212 отклонения будет отводить траекторию объекта так, что он направится по каналу 208. При выдвигании в "полное" положение в соответствующее время в течение свободного падения объекта трехходовое устройство 212 отклонения будет отводить траекторию объекта так, что он направится по каналу 207. Команды от оптического аппарата 204, определяющие, что объект должен быть отсортирован по каналу 208 или 207, заставят устройство отклонения выдвигаться в "среднее" и "полное" положения, соответственно в такой момент времени, чтобы гарантировать, что объект направится по каналу 208 или 207, как и требуется. Если оптический аппарат определит, что объект должен направляться по каналу 209, то это заставит устройство 212 отклонения оставаться втянутым.
На Фиг. 3 показано устройство 301 отклонения в соответствии с одним вариантом осуществления изобретения. Устройство 301 отклонения содержит участок 304 установки лопатки, отводящую лопатку 302, трехпозиционный пневматический цилиндр 303 и главный корпус (не показан). Отводящая лопатка 302 шарнирно прикреплена вдоль одного из ее концов к участку 304 установки лопатки. Участок 304 установки лопатки поддерживается статически главным корпусом (не показано) так, что отводящая лопатка 302 может поворачиваться вокруг ее точки 311 вращения относительно участка 304 установки лопатки и главного корпуса. Участок 304 установки лопатки может быть прикреплен к главному корпусу или быть неотъемлемой частью главного корпуса устройства отклонения.
Трехпозиционный пневматический цилиндр 303 содержит оболочку 317 цилиндра, передний конец 316 и задний конец 315. Оболочка 317 цилиндра установлена на главном корпусе устройства 301 отклонения. Пневматический цилиндр дополнительно содержит заднюю камеру 305, расположенную как смежная с задним концом 316, и переднюю камеру 308, расположенную как смежная с передним концом 316, отдельные камеры 305, 308 сформированы разделительной стенкой 313 в пределах цилиндра 303.
Передняя камера 308 трехпозиционного цилиндра 303 покрывает передний поршень 309, от которого проходит первый конец штока 310 переднего поршня. Второй конец штока 310 переднего поршня проходит через отверстие в оболочке 317 цилиндра и вращающимся образом соединяется с отводящей лопаткой 302 в точке 312 соединения. Движение переднего поршня 310 к концу 316 цилиндра, таким образом, осуществляет перемещение лопатки 302 в сторону от конца 316 цилиндра. Передний поршень 309 располагается в пределах передней камеры 308 так, что он задает первую переднюю секцию 318 камеры и вторую переднюю секцию 314 камеры. Первая передняя секция 318 камеры присоединяется к источнику давления воздуха, работающему с первым клапаном (не показано). Постоянная возвратная сила поддерживается во второй передней секции 314 камеры, чтобы сместить передний поршень 309 по направлению к разделительной стенке 313. Эта возвратная сила прикладывается подключением постоянного давления воздуха ко второй передней секции 314 камеры. Давление воздуха, подаваемое на вторую переднюю секцию 314 камеры, меньше, чем давление воздуха, подаваемое к передней секции 318 камеры, когда первый клапан находится в открытом положении. Когда передний поршень 309 находится вблизи разделительной стенки 313, передний поршень 309 находится в полностью втянутом состоянии.
Задняя камера 305 трехпозиционного цилиндра 303 покрывает задний поршень 306 и компоновку штока 307 заднего поршня. Задняя камера 305 и задний поршень 306 имеют более короткий ход, чем ход передней камеры 308 и переднего поршня 309. Разделительная стенка 313 содержит отверстие, через которое может проходить шток 307 заднего поршня. Воздухонепроницаемое уплотнение вокруг штока 307 заднего поршня обеспечивается отверстием в разделительной стенке 313. Задний поршень 306 располагается в пределах задней камеры 305 так, что он задает первую секцию 319 задней камеры и вторую секцию 320 задней камеры. Первая секция 319 задней камеры соединяется с источником давления воздуха, которым управляет второй клапан (не показан).
Управляя давлениями в пределах секций 314 и 318 передней камеры, оказывается возможным переместить передний поршень 309 между полностью втянутым состоянием, средним выдвинутым состоянием и полностью выдвинутым состоянием. Передний поршень 309 находится в полностью выдвинутом состоянии, когда он располагается напротив передней стенки 316. Задний поршень находится в полностью выдвинутом состоянии, когда он располагается напротив разделительной стенки 313. Следует отметить, что когда заднее положение полностью выдвинуто, свободный конец штока 307 заднего поршня выступает в первой секции 318 передней камеры. Длина штока 307 заднего поршня такова, что когда задний поршень 306 находится в полностью выдвинутом состоянии, шток 307 заднего поршня может действовать на передний поршень 309, чтобы толкать его в промежуточную точку между передним концом цилиндра 316 и разделительной стенкой 313. В этом случае, передний поршень 309 ни полностью втянут, ни полностью выдвинут, но находится в "среднем" выдвинутом состоянии. Когда первый клапан препятствует приложению давления воздуха к первой секции 318 передней камеры, возвратная сила постоянного давления воздуха во второй секции 318 передней камеры демпфируется против дальнейшего движения переднего поршня 309 в его полностью выдвинутое состояние.
Как изображено на Фиг. 3, устройство 301 отклонения находится во втянутом положении. Второй клапан приводится в действие, чтобы препятствовать приложению давления воздуха к первой секции 319 задней камеры, и имеющийся здесь воздух выходит из цилиндра 303. Первый клапан приводится в действие, чтобы препятствовать приложению давления воздуха к первой секции 318 передней камеры, и имеющийся здесь воздух выходит из цилиндра 303. Возвратная сила во второй секции 314 передней камеры толкает передний поршень 309 и, следовательно, задний поршень 306 к их втянутым состояниям. В результате, шток 310 переднего поршня переводит лопатку 302 в полностью втянутое состояние. При этом устройство 301 отклонения находится в полностью втянутом положении. Полностью втянутое устройство отклонения, расположенное в пределах трехходовой сортировочной системы в соответствии с Фиг. 2, позволит объектам 110 свободно падать от конвейера, без воздействия лопатки и по каналу 209.
Как изображено на Фиг. 4, устройство 301 отклонения находится в среднем выдвинутом положении. Второй клапан приводится в действие, чтобы приложить давление воздуха к первой секции 319 задней камеры, переводя задний поршень 306 к его выдвинутому состоянию. Первый клапан приводится в действие, чтобы препятствовать приложению давления воздуха к первой секции 318 передней камеры, и имеющийся здесь воздух выходит из цилиндра 303. Возвратная сила во второй секции 314 передней камеры толкает передний поршень 309 по направлению к разделительной стенке 313, пока он не упрется в шток 307 заднего поршня. Сила, передаваемая давлением воздуха, приложенная к первой секции 319 задней камеры, больше, чем возвратная сила во второй секции 314 передней камеры. Соответственно, задний поршень 306 остается в его полностью выдвинутом состоянии, и передний поршень 309 поэтому удерживается в среднем выдвинутом состоянии. В результате, шток 310 переднего поршня переводит лопатку 302 в среднее выдвинутое состояние. При этом устройство 301 отклонения находится в среднем выдвинутом положении. Когда устройство 301 отклонения, расположенное в пределах трехходовой сортировочной системы, в соответствии с Фиг. 2, находится в среднем выдвинутом положении, объекты 110, падающие с конвейера 205, будут катиться или скользить с лопатки 302 и по каналу 208. В предпочтительном варианте осуществления изобретения среднее выдвинутое положение является положением по умолчанию устройства отклонения.
Как изображено на Фиг. 5, устройство 301 отклонения находится в полностью выдвинутом положении. Первый клапан приводится в действие, чтобы подать давление воздуха к первой секции 318 передней камеры. Сила, передаваемая давлением воздуха, приложенная к первой секции 318 передней камеры, больше, чем возвратная сила во второй секции 314 передней камеры. Соответственно, передний поршень 309 переводится в свое выдвинутое состояние. В результате, шток 310 переднего поршня переводит лопатку 302 в полностью выдвинутое состояние. При этом устройство 301 отклонения находится в полностью выдвинутом положении. В системе сортировки, в соответствии с Фиг. 2, объекты 110, скользящие вниз с грани отводящей лопатки 302 в среднем выдвинутом положении, будут попадать в канал 207, если устройство отклонения перейдет к полностью выдвинутому положению в этот момент.
Следует отметить, что на Фиг. 5, второй клапан приводится в действие, чтобы препятствовать приложению давления воздуха к первой секции 319 задней камеры, и задний поршень 306 не находится в его выдвинутом состоянии. Когда передний поршень 309 находится в его полностью выдвинутом состоянии, это не оказывает существенного влияния на положение устройства 301 отклонения.
На Фиг. 6 показана альтернативная конфигурация устройства 301 отклонения в его полностью выдвинутом положении, где единственное различие с конфигурацией на Фиг. 5 - это то, что задний поршень 306 находится также в своем выдвинутом состоянии. Как можно видеть, это не воздействует на положение устройства 301 отклонения, которое остается, как на Фиг. 5, в своем выдвинутом состоянии.
Хотя устройство 301 отклонения содержит отводящую лопатку 302, альтернативные варианты осуществления изобретения могут содержать альтернативы отводящей лопатке, которые также должны функционировать как отводящее средство. Такие альтернативы включают в себя, но без ограничения, отводящий палец или гибкий отводящий желоб, имеющий неподвижный вход и подвижный выход.
Аналогичным образом, хотя устройство 301 отклонения содержит трехпозиционный пневматический цилиндр, альтернативные варианты осуществления изобретения могут содержать альтернативы трехпозиционному цилиндру, которые также должны функционировать как приводное средство для сочленения с отводящим устройством. Такая альтернативная конфигурация может содержать пару отдельных поршневых цилиндров, установленных вплотную между собой (обычно известный как четырехпозиционный цилиндр). В такой альтернативе, выступающий конец поршневого штока одного цилиндра может быть вращательным образом прикреплен к отводящему средству, и выступающий конец поршневого штока другого цилиндра может быть прикреплен к главному корпусу устройства отклонения. Другая альтернатива содержит пару цилиндров с различными ходами, установленных рядом друг с другом, так, что поршневые штоки обоих цилиндров входят в контакт с (но не скрепляются) отводящим средством. Дополнительное альтернативное приводное средство содержит электрический двигатель, выполненный с возможностью перемещения отводящего средства между втянутым, "средним" выдвинутым и полностью выдвинутым положениями. Следует отметить, что эти альтернативные приводные средства приведены в качестве примера и не предназначены для ограничения объема притязаний изобретения.
Кроме того, хотя возвратная сила во второй секции 314 передней камеры характеризуется тем, что передается соединением с постоянным давлением воздуха, смещающим передний поршень 309 по направлению к разделительной стенке 313, альтернативные варианты осуществления изобретения могут содержать альтернативные компоновки. Например, возвратная сила может быть передана спиральной пружиной, установленной в пределах второй секции 314 передней камеры. В альтернативе, возвратная сила может быть передана пластинчатой пружиной, интегрированной в отводящую лопатку 302 и смещенной по направлению к втянутому положению. Следует отметить, что эти альтернативные средства получения возвратной силы приведены в качестве примера и не предназначены для ограничения объема притязаний изобретения.
Дополнительные варианты осуществления этого изобретения содержат устройство отклонения, выполненное с возможностью движения между больше чем тремя положениями. Это может быть достигнуто заменой трехпозиционного цилиндра на четырехпозиционный цилиндр, содержащий два расположенных вплотную между собой цилиндра с единственными поршнями с различными ходами. Однако дополнительные воплощения таких вариантов осуществления изобретения также предполагаются.
Где система сортировки, как показанная на Фиг. 2, содержит конвейер 205 данной ширины, может быть установлена группа устройств отклонения, одно рядом с другим по ширине конвейера. В этой компоновке объект, сваливающийся от конца конвейера, начинает свободное падение в данной точке поперек ширины конвейера. Соответственный один или несколько устройств отклонения, соответствующих этой данной точке поперек ширины конвейера, могут затем быть приведены в действие для отвода объекта, как это требуется. Таким образом, множественные объекты могут быть отсортированы одновременно, поскольку они переносятся с конца конвейера в одно и то же время в различных точках поперек ширины конвейера и отводятся посредством одного или нескольких устройств отклонения по мере необходимости.
Хотя система сортировки на Фиг. 2 содержит оптический аппарат 204 для сканирования сортируемых объектов, настоящее изобретение не ограничивается сканированием с использованием видимого компонента электромагнитного спектра. Альтернативные варианты осуществления изобретения предполагают альтернативные средства сканирования. В одной альтернативе средство сканирования может содержать инфракрасный сканер и в другой альтернативе средство сканирования может содержать рентгеновский сканер. Другие средства сканирования также предполагаются, включая в себя, но без ограничения, средства сканирования, которые используют другие компоненты электромагнитного спектра. Кроме того, хотя оптический аппарат 204 на Фиг. 2 показан как сканирующий сортируемые объекты, находящиеся в свободном падении, в альтернативных вариантах осуществления изобретения средства сканирования могут также, или альтернативно, сканировать объекты прежде, чем они войдут в свободное падение. Например, в вариантах осуществления изобретения, содержащих конвейер, объекты могут также, или альтернативно, быть отсканированы, когда они находятся на конвейере.
Хотя система сортировки на Фиг. 2 была показана как имеющая по существу или полностью горизонтально ориентированный конвейер, альтернативные варианты осуществления изобретения предполагаются, причем конвейер по существу или полностью не является горизонтальным. В таких вариантах осуществления неровности поверхности, проходящие по всей ширине конвейера, могут удерживать сортируемые объекты по существу в статическом положении, когда они переносятся вдоль конвейера.
Кроме того, хотя система сортировки на Фиг. 2 показана как содержащая конвейер 205, такой, что сортируемые объекты входят в свободное падение, поскольку они срываются с конца конвейера, альтернативные средства срыва предполагаются в альтернативных вариантах осуществления изобретения. В одной альтернативе, средство срыва содержит вибрационную подачу. В другой альтернативе, средство срыва содержит желоб скольжения. В дополнительной альтернативе, средство срыва содержит псевдоожиженный слой. Дополнительные альтернативные средства срыва также предполагаются.
Варианты осуществления в изобретении, описанном в связи с чертежами, содержат компьютерный аппарат и/или процессы, выполняемые в компьютерном аппарате. Однако изобретение также простирается на компьютерные программы, в частности компьютерные программы, сохраняемые на или в несущей, приспособленной для трансляции изобретения в практику. Программа может быть в форме исходного кода, объектного кода или кода, среднего между исходным и объектным кодом, например, в частично компилированной форме или в любой другой форме, подходящей для использования в осуществлении способа в соответствии с изобретением. Несущая может содержать носитель данных, такой как ROM, например CD ROM, или магнитный носитель данных, например гибкий диск или жесткий диск. Несущая может быть электрическим или оптическим сигналом, который может быть передан через электрический или оптический кабель, или по радио, или с помощью других средств.
То, что здесь описано, включает в себя примеры одного или нескольких объектов. Конечно, невозможно описать каждую мыслимую комбинацию компонентов или методологий для целей описания вышеупомянутых объектов. Специалисту в данной области техники будет понятно, что возможны многие дополнительные комбинации и перестановки различных объектов. Соответственно, описанные объекты предназначены для охвата всех таких изменений, модификаций и вариаций, которые находятся в пределах сущности и объема притязаний прилагаемой формулы изобретения. Кроме того, в той степени, в которой используются термины "включает в себя" или "включающий в себя" или любые их вариации, либо в подробном описании, либо в формуле изобретения, такие термины предназначены для обозначения включения, аналогично термину "содержащий", если "содержащий" интерпретируется как переходное слово в формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАЗДВИЖНОЙ ФРЕЗЕРНЫЙ БАРАБАН ДЛЯ БУРИЛЬНОЙ МАШИНЫ | 2007 |
|
RU2422634C1 |
| УСТРОЙСТВО ДЛЯ ЗАКРЕПЛЕНИЯ В СКВАЖИНЕ БУРИЛЬНОЙ КОЛОННЫ | 2002 |
|
RU2274725C2 |
| СИСТЕМА ПОДВЕСКИ ХВОСТОВИКА И СПОСОБ ПРИВЕДЕНИЯ ЕЕ В ДЕЙСТВИЕ | 2021 |
|
RU2839357C1 |
| АМФИБИЯ | 2007 |
|
RU2520665C2 |
| БУРОВОЕ ДОЛОТО С САМОРЕГУЛИРУЮЩИМИСЯ ПЛОЩАДКАМИ | 2015 |
|
RU2708444C2 |
| ИНСТРУМЕНТ И СПОСОБ ДЛЯ ОЦЕНКИ ПЛАСТА | 2004 |
|
RU2354827C2 |
| УСТРОЙСТВО ДЛЯ ПОДДЕРЖАНИЯ ВЗРЫВНОГО ПРИСПОСОБЛЕНИЯ | 2017 |
|
RU2741897C2 |
| КУРИТЕЛЬНОЕ ИЗДЕЛИЕ | 2011 |
|
RU2614328C1 |
| КУРИТЕЛЬНОЕ ИЗДЕЛИЕ | 2011 |
|
RU2573288C2 |
| МАРКИРОВОЧНОЕ УСТРОЙСТВО И ЛЕСОЗАГОТОВИТЕЛЬНЫЙ АГРЕГАТ ДЛЯ ЗАГОТОВКИ ДЕРЕВЬЕВ | 2010 |
|
RU2517863C2 |
Предложено изобретение для автоматизированной сортировки фруктов и овощей и т.д. Устройство отклонения для использования в пределах системы для сортировки дискретных объектов, устройство отклонения, содержащее, по меньшей мере, одно отводящее устройство, выполненное с возможностью изменения траектории объекта, и приводное средство, выполненное с возможностью приведения в движение отводящего устройства, по меньшей мере, между тремя дискретными положениями, так, что при использовании, по меньшей мере, один из упомянутых дискретных объектов проходит вдоль одного из трех каналов, и способ сортировки дискретных объектов, содержащий этапы позиционирования отводящего устройства в одном из трех дискретных положений; и изменения траектории, по меньшей мере, одного из упомянутых дискретных объектов, когда упомянутое отводящее устройство размещено в двух из упомянутых трех дискретных положений. Предложенное изобретение обеспечивает техническую задачу, заключающуюся в том, как сортировать дискретные объекты, такие как фрукты или овощи, на три или более классов, минимизируя возможность повреждения таких хрупких объектов и избегая использования множества последовательных сортировочных устройств. 6 н. и 11 з.п. ф-лы, 6 ил.
1. Устройство отклонения для использования в системе для сортировки дискретных объектов, причем устройство отклонения содержит:
по меньшей мере, одну лопатку, выполненную с возможностью изменения траектории падающего объекта; и
приводное средство, выполненное с возможностью приведения в движение лопатки, по меньшей мере, между тремя дискретными положениями, так, что при использовании, по меньшей мере, один из упомянутых дискретных объектов проходит вдоль одного из трех каналов.
2. Устройство отклонения по п. 1, причем, по меньшей мере, одна лопатка выполнена с возможностью вхождения в контакт с упомянутым, по меньшей мере, одним объектом, когда она находится, по меньшей мере, в двух из упомянутых, по меньшей мере, трех дискретных положений.
3. Устройство отклонения по п. 1, причем, по меньшей мере, одно отводящее устройство содержит гибкий желоб, имеющий ввод и подвижный вывод, приводимый в движение между упомянутыми, по меньшей мере, тремя дискретными положениями.
4. Устройство отклонения по п. 1, причем приводное средство содержит трехпозиционный пневматический цилиндр.
5. Устройство отклонения по п. 1, причем приводное средство содержит электрический двигатель.
6. Набор отклонения, содержащий множество устройств отклонения по любому из пп. 1-5.
7. Набор отклонения по п. 6, причем каждое из упомянутого множества устройств отклонения является независимо активируемым.
8. Система сортировки, содержащая, по меньшей мере, одно устройство отклонения по любому одному из пп. 1-5.
9. Система сортировки по п. 8, причем отводящее устройство упомянутого, по меньшей мере, одного устройства отклонения размещается, по меньшей мере, в двух из, по меньшей мере, трех положений для отвода объекта в соответственный отклоняющий канал.
10. Способ сортировки дискретных падающих объектов, содержащий этапы:
i) позиционирования лопатки в одном из трех дискретных положений; и
ii) изменения траектории, по меньшей мере, одного из упомянутых дискретных объектов, когда упомянутая лопатка размещена в двух из упомянутых трех дискретных положений.
11. Способ по п. 10, причем этап ii) содержит отведение упомянутого дискретного объекта упомянутым отводящим устройством.
12. Способ по п. 11, причем этап ii) содержит изменение траектории, по меньшей мере, одного из упомянутых дискретных объектов, когда упомянутый, по меньшей мере, один дискретный объект падает.
13. Способ по любому из пп. 10-12 причем этап ii) содержит изменение траектории, по меньшей мере, одного из упомянутых дискретных объектов в один из двух соответственных отклоняющих каналов.
14. Способ по любому из пп. 10-12, дополнительно содержащий изменение положения отводящего устройства между двумя из упомянутых трех дискретных положений между прохождением последовательных дискретных объектов.
15. Способ по п. 13, дополнительно содержащий изменение положения отводящего устройства между двумя из упомянутых трех дискретных положений между прохождением последовательных дискретных объектов.
16. Компьютерно-читаемый носитель, содержащий компьютерную программу, содержащую средство кода компьютерной программы, выполненное с возможностью выполнения всех этапов по любому из пп. 10-15, когда упомянутая программа выполняется на компьютере.
17. Реализуемая с помощью компьютера система для использования в системе для сортировки дискретных объектов по п. 1, содержащая:
средство для позиционирования отводящего устройства в одном из трех дискретных положений; и
средство для изменения траектории, по меньшей мере, одного из упомянутых дискретных объектов, когда упомянутое отводящее устройство размещено в двух из упомянутых трех дискретных положений.
| WO 2004045781 A1, 03.06.2004 | |||
| DE 2952411 B1, 27.05.1981 | |||
| US 5279426 A, 18.01.1994. |

