Предлагаемое изобретение относится к электротехнической промышленности и может быть использовано при эксплуатации никель-водородных аккумуляторных батарей (АБ) в автономных системах электропитания (СЭП) космических аппаратов (КА), функционирующих на низкой околоземной орбите.
В течение всего активного срока существования современных КА на низкой околоземной орбите производится 10000 и более зарядно-разрядных циклов АБ и подобный режим работы СЭП лучше всего обеспечивают никель-водородные аккумуляторные батареи (НВАБ).
Особенностью НВАБ является то, что все последовательно соединенные аккумуляторы заряжаются и разряжаются одним и тем же количеством электрического заряда (А⋅ч). В идеальном случае, если начальное состояние аккумуляторов одинаково, не должно быть никаких изменений в их относительных степенях заряженности. Однако вследствие разницы в скорости саморазряда последовательно соединенные аккумуляторы приобретают различное состояние заряженности. Любое отклонение, вызванное дисперсией начальных характеристик саморазряда, градиентом температур внутри НВАБ и процессом старения, может увеличить разброс в степенях заряженности аккумуляторов, что приводит к деградации характеристик НВАБ, и более того, при отсутствии систем балансировки состояния заряда, может привести к снижению надежности работы НВАБ. Существует еще так называемый «эффект памяти», связанный с уменьшением емкости НВАБ при циклировании на небольшую глубину - (10-20) %. Причиной уменьшения емкости НВАБ является кристаллизация некоторой части материала электродов аккумуляторов в силу отчуждения ее на длительное время от токообразующей химической реакции. Именно такая глубина циклирования выбирается при эксплуатации АБ на низких околоземных орбитах. Поэтому для выравнивания аккумуляторов по емкости, устранения так называемого «эффекта памяти» и оценки состояния АБ необходимо периодически проводить восстановительные (формовочные) циклы, которые представляют собой практически полный разряд и последующий заряд АБ.
В процессе проведения формовочных циклов (ФЦ) НВАБ необходимо вести постоянный контроль параметров СЭП, а также своевременно осуществлять изменения режимов эксплуатации НВАБ. Наиболее важным и сложным при этом является точное прогнозирование момента времени для перевода НВАБ в режим восполнения после ее глубокого разряда в режиме запрета заряда. Действительно, в случае преждевременного отключения формуемой АБ от разряда эффективность формовочного цикла снижается, поскольку параметры аккумуляторов (текущая емкость и напряжение) не выравниваются в полной мере, в то же время, заметный переразряд НВАБ, как правило, порождает побочные химические реакции (например, реакцию с выделением атомарного кислорода), вызывающие значительное тепловыделение в аккумуляторах. Кроме того, переразряд может способствовать возникновению «переполюсовки» электродов. Хотя никель-водородные аккумуляторные батареи не боятся «переполюсовки» электродов, но частые их повторения ухудшают технические характеристики отдельных аккумуляторов (B.C. Багоцкий, A.M. Скундин. Химические источники тока, М., Энергоиздат, 1981).
При наличии телеметрической информации (ТМИ) и достаточно большого количества сеансов связи с КА проведение ФЦ НВАБ не представляет особой сложности. Однако на практике количество сеансов связи минимизируют по объективным причинам, а бортовая система телеметрической информации (БСТИ) используется, как правило, только в сутки профилактического контроля КА (например, одни сутки в течение месяца). Для КА с большим сроком активного существования (более пяти лет) часто возникают случаи функционирования бортовой аппаратуры (БА) с отклонением от штатного режима. К числу такого функционирования БСТИ следует отнести режим, когда ТМИ формируется на борту, но не может быть использована потребителями в штатном режиме, например, из-за отказа передающего устройства. Тогда проведение ФЦ НВАБ значительно усложняется, особенно при выполнении формовочных циклов с задействованием аварийной шины СЭП (Кирилин А.Н., Ахметов Р.Н., Сторож А.Д., Аншаков Г.П. Космическое аппаратостроение, Государственный научно-производственный ракетно-космический центр «ЦСКБ-Прогресс», г. Самара, 2011 г., разд. 8).
Известен способ эксплуатации никель-водородных аккумуляторных батарей системы электропитания космического аппарата по патенту RU №2399122 (аналог), заключающийся в том, что две или более аккумуляторные батареи циклируют в режиме заряда-разряда, задаваемом бортовой автоматикой системы электропитания; степень заряда АБ ограничивают по уровню срабатывания сигнальных датчиков давления, размещенных в отдельных аккумуляторах каждой АБ; контролируют параметры каждой АБ, например текущую электрическую емкость, напряжение, температуру; периодически проводят формовочные циклы АБ путем глубокого их разряда; оценивают состояние АБ; периодически, например один раз в 6-9 месяцев, вводят запрет заряда для одной из АБ; в качестве разрядной нагрузки используют бортовую аппаратуру космического аппарата; критерием ограничения глубины разряда выбирают величину напряжения АБ, причем значение граничного уровня напряжения устанавливают в вольтах равным числу n либо (n+1) аккумуляторов в АБ, при достижении которого снимают запрет заряда АБ, включая тем самым ее в штатную работу; значения зарядной емкости срабатывания сигнального датчика давления и максимального напряжения АБ при заряде, определяемые в процессе завершения формовочного цикла, используют для оценки состояния АБ и прогнозирования ее деградации; аналогичную последовательность операций повторяют для последующей АБ; при этом промежуток времени от завершения формовочного цикла одной АБ до начала формовочного цикла другой АБ выбирают, исходя из температурного режима отформованной АБ.
Недостатком аналога является относительно низкая надежность СЭП в частности и живучесть КА в целом при возникновении нештатных ситуаций, связанных с аномальной работой одного зарядно-разрядного устройства (ЗРУ), поскольку данный способ не предусматривает проведения в этом случае ФЦ АБ из подсистемы с неисправным ЗРУ.
К аномальной работе ЗРУ относится режим его функционирования (не функционирования) при отказе его зарядного устройства (ЗУ) или разрядного устройства (РУ). При этом в случае отказа ЗУ СЭП в режиме разряда функционирует штатно, аналогично, в случае отказа РУ в режиме заряда СЭП также функционирует штатно.
Известен способ эксплуатации никель-водородной аккумуляторной батареи системы электропитания космического аппарата (варианты) по патенту RU №2483400 (прототип), заключающийся в том, что две или более аккумуляторные батареи (АБ) циклируют в режиме заряда-разряда, задаваемом бортовой автоматикой системы электропитания; степень заряда АБ ограничивают по уровню срабатывания сигнальных датчиков давления, размещенных в отдельных аккумуляторах каждой АБ; контролируют параметры каждой АБ, например текущую электрическую емкость, напряжение, температуру; периодически один раз в 6-9 месяцев вводят запрет заряда для одной из АБ для выполнения формовочного цикла; в качестве разрядной нагрузки используют бортовую аппаратуру космического аппарата; критерием ограничения глубины разряда выбирают величину напряжения АБ равной n либо (n+1) В, где n - число аккумуляторов в АБ; значения зарядной емкости срабатывания сигнального датчика давления и максимального напряжения АБ при заряде, определяемые в процессе завершения формовочного цикла, используют для оценки состояния АБ и прогнозирования ее деградации; аналогичную последовательность операций повторяют для последующей АБ, а при аномальной работе зарядно-разрядного устройства (ЗРУ), связанной с отказом только зарядного устройства (или разрядного устройства), для проведения формовочного цикла АБ используют аварийную шину коммутационной аппаратуры, управляемой по разовым командам из наземного комплекса управления; заряд (разряд) формуемой АБ проводят путем подключения ее к любому зарядному устройству работоспособного ЗРУ, образующего с «собственной» АБ подсистему, при этом отключают от данной подсистемы «собственную» АБ с переводом ее в режим «саморазряда» на время восполнения (разряда) формуемой АБ до срабатывания сигнального датчика давления, а после восполнения формуемую АБ подсоединяют коммутационной аппаратурой аварийной шины к одному из работоспособных ЗРУ параллельно АБ этой подсистемы для дальнейшего функционирования системы электропитания.
Данное техническое решение предусматривает использование штатной ТМИ. Однако контроль технического состояния и эксплуатация АБ в случае отсутствия штатной ТМИ, особенно при аномальной работе одного из ЗРУ, значительно затрудняется ввиду увеличения сеансов связи, что ведет к снижению эффективности заявленного способа.
Задачей предлагаемого изобретения является повышение эффективности способа.
Поставленная задача достигается тем, что в способе эксплуатации НВАБ системы электропитания КА с большим сроком активного существования, заключающемся в циклировании двух или более аккумуляторных батарей (АБ) в режиме заряда-разряда, задаваемом бортовой автоматикой системы электропитания; ограничении степени заряда АБ по уровню срабатывания сигнальных датчиков давления, размещенных в отдельных аккумуляторах каждой АБ; контроле параметров каждой АБ, например текущей электрической емкости, напряжения, температуры; введении периодически один раз в каждые 6-9 месяцев запрета заряда для одной из АБ для выполнения формовочного цикла (ФЦ); использовании в качестве разрядной нагрузки для формуемой АБ бортовой аппаратуры КА; выборе критерия для ограничении глубины разряда величины напряжения АБ, равной n либо (n+1) В, где n - число аккумуляторов в АБ; использовании значений зарядной емкости срабатывания сигнального датчика давления и максимального напряжения АБ при заряде, определяемых в процессе завершения формовочного цикла, для оценки состояния АБ и прогнозирования ее деградации; повторении аналогичной последовательности операций для последующей АБ; использовании при аномальной работе зарядно-разрядного устройства (ЗРУ), связанной с отказом только зарядного устройства (или разрядного устройства), для проведения формовочного цикла АБ аварийной шины коммутационной аппаратуры, управляемой по разовым командам из наземного комплекса управления; проведении заряда (разряда) формуемой АБ путем подключения ее к любому зарядному устройству работоспособного ЗРУ, образующего с «собственной» АБ подсистему; отключении при этом от данной подсистемы «собственной» АБ с переводом ее в режим «саморазряда» на время восполнения (разряда) формуемой АБ до срабатывания сигнального датчика давления; подсоединении после восполнения формуемой АБ коммутационной аппаратурой аварийной шины к одному из работоспособных ЗРУ параллельно АБ этой подсистемы для дальнейшего функционирования системы электропитания, что в случае отказа передающего устройства штатной бортовой системы телеметрической информации (БСТИ) в силу каких-либо технических причин для контроля состояния СЭП, в том числе и формуемой АБ, используют информацию контрольного и рабочего подмассивов из состава массива информации оперативного контроля (ИОК), формируемых и отображаемых в нем по исходным данным, выдаваемым бортовой системой телеметрической информации в бортовой комплекс управления; при этом в процессе проведения режима разряда формуемой АБ организуют не менее трех сеансов связи с КА со съемом ИОК на каждом сеансе связи; указанные подмассивы, составленные из аналоговых и сигнальных параметров АБ, разбивают на отдельные информационные группы, отличающиеся друг от друга комбинацией параметров АБ; причем группы параметров АБ одного из подмассивов, представляющего собой контрольную телеметрическую информацию, формируют и отображают в составе массива ИОК по факту срабатывания либо сигнальных датчиков давления любой из n АБ, либо по факту срабатывания пороговых датчиков минимального напряжения любой АБ или минимального напряжения любого аккумулятора; при этом группы параметров АБ другого подмассива, представляющего собой рабочую телеметрическую информацию, формируют и отображают в составе массива ИОК в определенной временной последовательности, причем количество групп параметров АБ и временные промежутки между ними задают в составе рабочей программы (РП); скорость разряда формуемой АБ вычисляют, используя данные массива ИОК, как минимум, с двух сеансов связи с КА, а по известной скорости разряда формуемой АБ определяют расчетный номер витка орбиты N для принудительной отмены режима глубокого разряда формуемой АБ; при этом разовые команды (РК), необходимые для фактического завершения режима разряда формуемой АБ, выдают в сеансе связи на витке (N+1) либо (N+2); причем в сеансах связи, в которых выдаются РК по управлению режимами функционирования формуемой АБ или изменению конфигурации СЭП с использованием коммутационной аппаратуры аварийной шины, осуществляют второй съем ИОК; при этом параметры АБ, отображаемые в составе ИОК, соответствуют моменту времени выдачи РК для второго съема ИОК.
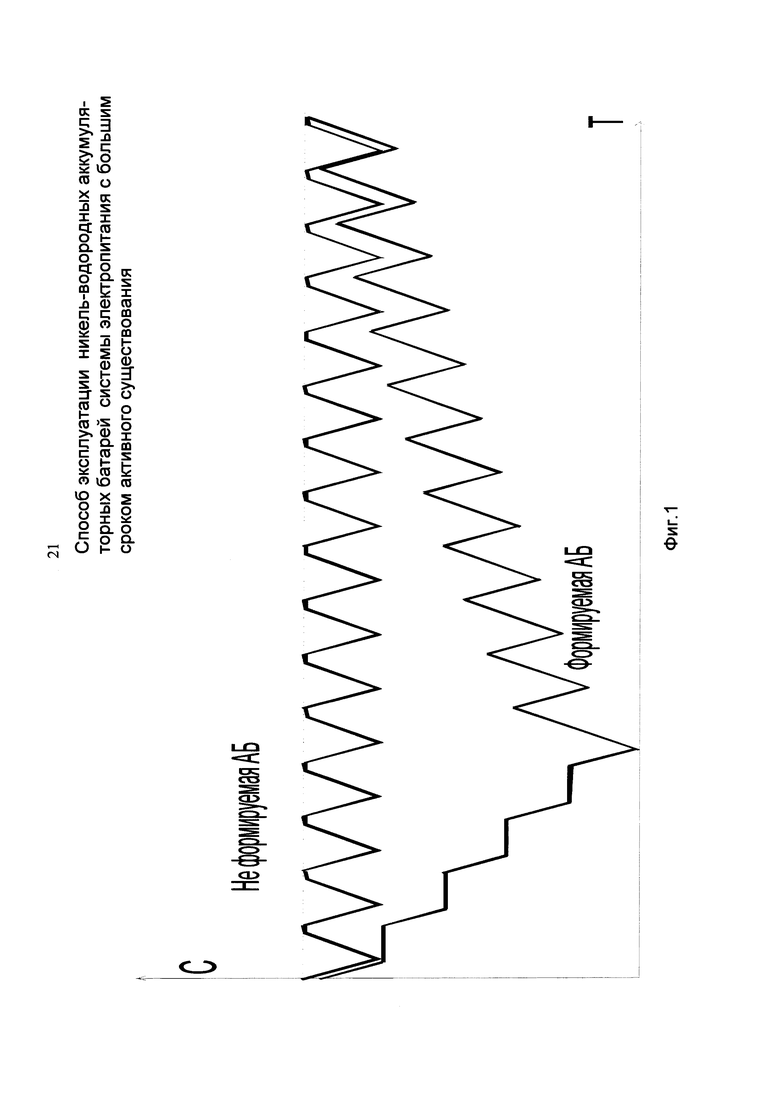
На фиг. 1 показаны идеализированные циклограммы изменения текущей емкости для формуемой АБ и АБ, функционирующей штатно. Формуемая АБ циклично разряжается, достигая в конечном итоге состояния глубокого разряда (режим разряда формуемой АБ); затем она заряжается в зависимости от освещенности солнечной батареи и потребляемой бортовой аппаратурой мощности (режим восполнения формуемой АБ). Функционирующая штатно АБ имеет периодически изменяющуюся циклограмму.
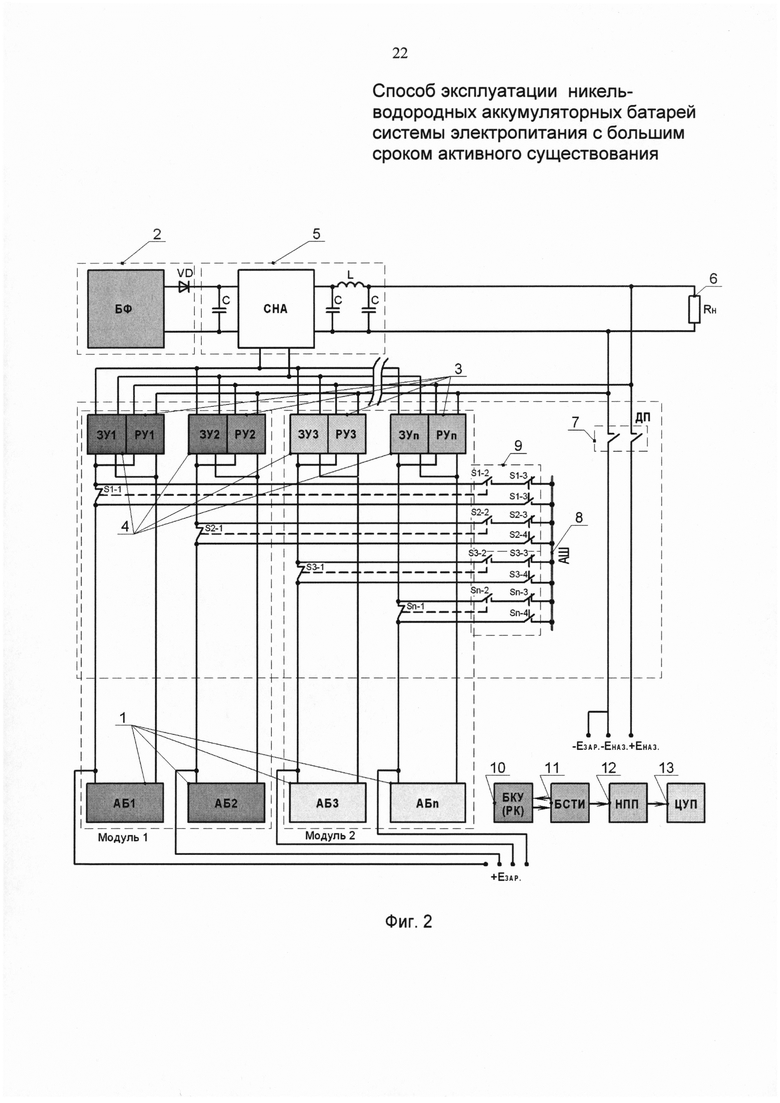
На фиг. 2 показана упрощенная блок-схема работы СЭП, в том числе и в процессе проведения формовочного цикла АБ.
Аккумуляторные батареи циклируют в режиме заряда-разряда в соответствии с логикой функционирования СЭП в составе n подсистем, образованных путем последовательного включения между собой одной аккумуляторной батареи и одного зарядно-разрядного устройства (3РУ). Система электропитания состоит из n аккумуляторных батарей АБ (АБ1, АБ2, …, АБn) 1, оснащенных сигнальными датчиками давления для отключения АБ от заряда, батареи фотоэлектрической (БФ) 2, комплекса автоматики и стабилизации напряжения (КАС), включающего в себя разрядные устройства РУ (РУ1, РУ2, …, РУm) 3, зарядные устройства ЗУ (3У1, 3У2, …, 3Уm) 4, стабилизатор напряжения и автоматику (СНА) 5. Бортовая аппаратура (БА) 6 может быть запитана от РУ (РУ1, РУ2, …, РУm) 3 или СНА 5, а также в процессе испытаний от наземного источника питания Еназ через дистанционный переключатель 7. Аккумуляторные батареи АБ (АБ1, АБ2, …, АБm) 1 перед стартом КА заряжаются вспомогательным зарядным устройством Езар.
В отдельных режимах работы СЭП РУ (РУ1, РУ2, …, РУm) 3 и СНА 5 могут питать электрической энергией совместно нагрузку, каковой является БА 6. При аномальной работе какого-либо ЗУ (ЗУ1, ЗУ2, …, ЗУm) 4 для изменения конфигурации СЭП может быть использована аварийная шина 8 с коммутационной аппаратурой 9.
Используя бортовой комплекс управления (БКУ) 10, можно формировать информацию оперативного контроля, а при необходимости выдавать разовые команды (РК) для изменения режимов работы СЭП, в том числе такие РК, как «Запрет заряда A5i», «Восстановление КАС», «Отключение АБi», «Выключение ЗРУ1 от аварийной шины». Кроме того, с помощью БКУ 10 на каждом сеансе связи с КА осуществляется передача на наземные приемные пункты (НПП) 12 ИОК, содержащей в основном сведения об изменении технического состояния отдельных бортовых систем и КА в целом с фиксированием времени возникновения и завершения каждого события. Бортовая система телеметрической информации 11 осуществляет сбор, обработку и передачу информации на НПП 12 и далее в центр управления полетами (ЦУП) 13 для анализа состояния бортовых систем, причем ТМИ может быть записана в дискретном или непрерывном режимах. Особая ценность ТМИ заключается в том, что телеметрические параметры БА 6 могут быть представлены при необходимости в виде графических зависимостей от времени. Ограниченная часть телеметрической информации в виде дискретных подмассивов контрольной и рабочей телеметрической информации отображается в составе массива ИОК. Информационный обмен между БКУ 10 и БСТИ 11 осуществляется через бортовую вычислительную машину (БВС) КА с использованием специального алгоритма (на фиг. 2 БВС не показана). Подробное описание устройства и принципа взаимодействия БКУ с БВС и БСТИ здесь не приводится, их можно найти в других источниках (Кирилин А.Н., Ахметов Р.Н., Сторож А.Д., Аншаков Г.П. Космическое аппаратостроение, Государственный научно-производственный ракетно-космический центр «ЦСКБ-Прогресс», г. Самара, 2011 г.).
При штатной работе СЭП аккумуляторные батареи АБ (АБ1, АБ2, …, АБm) 1 заряжаются на световом участке орбиты КА, а на теневом участке АБ (АБ1, АБ2, …, АБm) 1 питают БА 6 стабилизированным РУ (РУ1, РУ2, …, РУm) 3 напряжением. Батарея фотоэлектрическая 2 на световом участке обеспечивает стабилизированным СНА 5 напряжением БА 6 и одновременно заряжает АБ (АБ1, АБ2, …, АБm) 1. Из фиг. 2 видно, что «минусовые» шины АБ не коммутируются и гальванически связаны между собой, поэтому коммутационная аппаратура 8 аварийной шины обеспечивает изменение конфигурации СЭП только по «плюсовой» шине.
Так как существенная разбежка параметров аккумуляторов АБ (АБ1, АБ2, …, АБm) 1 происходит через 6-9 месяцев, то периодичность проведения формовочных циклов выбирается один раз в 6-9 месяцев. При этом конкретный срок их проведения в пределах 6-9 месяцев может быть установлен, исходя из других требований, например, в период минимальных длительностей теневых участков орбиты КА и т.д.
Формовочные циклы проводят по очереди на одной из АБ (АБ1, АБ2, …, АБm) 1 в произвольном порядке, используя зарядно-разрядное устройство (ЗРУ) 10, состоящее из РУ (РУ1, РУ2, …, РУm) 3 и ЗУ (ЗУ1, ЗУ2, …, ЗУm) 4, и аварийную шину 8 с коммутационной аппаратурой 9 при необходимости. За сутки до проведения формовочного цикла при штатной работе СЭП осуществляют съем информации (на фиг. 2 система телеметрического контроля КА показана) о работе формуемой АБ (максимальное напряжение на заряде, минимальное напряжение при разряде, максимальную текущую емкость при срабатывании датчика давления, максимальную температуру).
Запрет заряда формуемой АБ вводят путем выдачи из наземного комплекса управления (НКУ) через БКУ 10 РК «Запрет заряда АБ» с указанием номера АБ. В этом случае происходит разряд формуемой АБ на нагрузку (на бортовую аппаратуру 6) на теневых участках орбиты. Таким образом, запасенную в АБ энергию используют по прямому назначению. Разряд формуемой АБ происходит циклично (фиг. 1), так как действие РК «Запрет заряда АБ» не снимается до достижения заданного минимального напряжения на АБ. В этом случае происходит полное выравнивание характеристик аккумуляторов формуемой АБ. Признак глубокого разряда формуемой АБ может быть определен не только по заданному снижению напряжения АБ, но и по минимально допустимой глубине ее разряда.
После выполнения необходимого глубокого разряда запрет заряда АБ снимают путем выдачи РК «Восстановление КАС» и формуемую АБ заряжают на фоне штатного функционирования СЭП на солнечных участках орбиты. Формовочный цикл считают завершенным, если формуемая АБ будет заряжена полностью до срабатывания сигнального датчика давления (на фиг. 2 сигнальный датчик давления не показан).
Качественно эффективность формовочного цикла оценивают путем сравнения характеристик АБ, полученных до и после проведения формовочных циклов. Формовочные циклы считают эффективными, если после их проведения значения максимального напряжения при заряде и текущей емкости, при которой происходит срабатывание сигнального датчика давления, увеличились при прочих равных условиях. Изменение указанных параметров в сторону их увеличения свидетельствует о выравнивании напряжений аккумуляторов и, как следствие, увеличении величины текущей емкости, при которой срабатывает сигнальный датчик давления. Снижение уровня срабатывания сигнального датчика давления по сравнению с аналогичным параметром предыдущего формовочного цикла указывает о деградации электродвижущей силы (ЭДС) отдельных аккумуляторов и АБ в целом.
Своевременное определение степени разбаланса аккумуляторов и проведение очередного формовочного цикла АБ в целом позволяет надежно их эксплуатировать в длительное время.
Повышение надежности эксплуатации никель-водородных аккумуляторных батарей в основном достигается за счет проведения формовочного цикла через каждые 6-9 месяцев путем глубокого разряда АБ с последующим ее восполнением. При этом живучесть системы электропитания в частности и КА в целом увеличивается за счет использования бортовой аппаратуры в качестве нагрузки для формуемой АБ, поскольку только в этом случае формуемая АБ не выводится из состава системы электропитания и поддерживает заданный уровень надежности СЭП.
Однако из-за увеличения срока активного существования современных КА имеется определенная вероятность отказа зарядного устройства ЗРУ. При этом важно, чтобы все работоспособные АБ были использованы в составе СЭП. Для этой цели может быть применена аварийная шина 8 с коммутационной аппаратурой 9. Наличие аварийной шины 8 с коммутационной аппаратурой 9 позволяет качественно проводить формовочный цикл АБ из состава подсистемы, содержащей аномально работающее ЗРУ, что в конечном итоге способствует повышению показателей надежности и живучести СЭП в частности и КА в целом.
Допустим произошел отказ ЗУ ЗРУ подсистемы 1 (ЗРУ1+АБ1) первого модуля. После идентификации отказа ЗУ1 ЗРУ1 (аккумуляторная батарея АБ1 (A5i) подключается, например, параллельно АБ2 (ABj) к ЗРУ2. В такой конфигурации СЭП функционирует штатно. Для проведения формовочного цикла АБ1 выдают РК «Восстановление КАС», так как РУ1 ЗРУ1 работоспособно. При этом конфигурация СЭП имеет вид, показанный на фиг. 2, т.е. АБ1 подключается к ЗРУ1 и функционирует только в режиме разряда, так как имеется отказ ЗУ1 ЗРУ1. После завершения глубокого разряда АБ1 (до снижения напряжения АБ1, например, до 29 В, т.е. (n+1) В) выдают последовательно РК: «Отключение АБ1», РК «Выключение ЗРУ1 от аварийной шины», РК «Отключение АБ2». Так как при выдаче любой РК выполняются два переключения силовых контактов, то по РК «Отключение АБ1» происходит отключение АБ1 от ЗРУ1 (размыкание контакта S1-1) и подключение ЗРУ1 к аварийной шине (замыкание контакта S1-2); по РК «Выключение ЗРУ1 от аварийной шины» ЗРУ1 отключается от аварийной шины (размыкается контакт S1-3), а АБ1 подключается к аварийной шине (замыкается контакт S1-4); по РК «Отключение АБ2» к аварийной шине подключается ЗРУ2 (замыкается контакт S2-2), а АБ2 отключается от ЗРУ2 (размыкается контакт S2-1). Получается конфигурация СЭП, когда АБ2 переведена в режим «саморазряда», а АБ1 подключена к ЗРУ2 для штатного функционирования. В этом режиме происходит восполнение АБ1 путем штатного цитирования. Последовательность РК «Восстановление КАС», РК «Отключение АБ1», РК «Выключение ЗРУ1 от аварийной шины» и РК «Выключение ЗРУ2 от аварийной шины», выданные после восполнения АБ1, приводит к подключению АБ1 к ЗРУ2 параллельно АБ2 для дальнейшей штатной работы.
Допустим произошел отказ РУ ЗРУ подсистемы 1 (ЗРУ1+АБ1). После идентификации отказа РУ1 ЗРУ1 аккумуляторная батарея АБ1 подключается, например, параллельно АБ2 к ЗРУ2. В такой конфигурации СЭП функционирует штатно. Для проведения ФЦ АБ1 выдают последовательно РК: «Отключение АБ1», РК «Выключение ЗРУ1 от аварийной шины», РК «Отключение АБ2». По РК «Отключение АБ1» происходит отключение АБ1 от ЗРУ1 (размыкание контакта S1-1) и подключение ЗРУ1 к аварийной шине (замыкание контакта S1-2), по РК «Выключение ЗРУ1 от аварийной шины» ЗРУ1 отключается от аварийной шины (размыкается контакт S1-3), а АБ1 подключается к аварийной шине (замыкается контакт S1-4), по РК «Отключение АБ2» к аварийной шине подключается ЗРУ2 (замыкается контакт S2-2), а АБ2 отключается от ЗРУ2 (размыкается контакт S2-1). Получается конфигурация СЭП, когда АБ2 переведена в режим «саморазряда», а АБ1 подключена к ЗРУ2 для штатного функционирования. При этом АБ1 через ЗРУ2 разряжается до напряжения 29 В, т.е. происходит формовочный цикл АБ1. После завершения глубокого разряда выдают РК «Восстановление КАС». При этом происходит только заряд АБ1, так как РУ1 неработоспособно, а АБ2 подключается к ЗРУ2 и функционирует штатно. После восполнения АБ1 выдают последовательно РК «Отключение АБ1», РК «Выключение ЗРУ1 от аварийной шины» и РК «Выключение ЗРУ2 от аварийной шины», что приводит к подключению АБ1 к ЗРУ2 параллельно АБ2 для дальнейшей штатной работы.
В случае отсутствия штатной ТМИ для выполнения качественного ФЦ АБ необходимо иметь минимум следующей информации: значения емкости и напряжения АБ с заданной периодичностью, в том числе на начало ФЦ; среднюю скорость разряда формуемой АБ; расчетный номер витка для завершения режима разряда формуемой АБ; значения тока разряда, напряжения, температуры, текущей емкости формуемой АБ в момент снятия запрета заряда; длительность режима разряда формуемой АБ; длительность режима восполнения формуемой АБ до срабатывания сигнального датчика давления; значения емкости, напряжения и температуры АБ в момент срабатывания сигнального датчика давления. Располагая такой информацией в полном объеме, можно постоянно контролировать техническое состояние СЭП и качественно проводить плановые формовочные циклы АБ, следовательно, повысить (поддерживать на заданном уровне) надежность функционирования НВАБ и живучесть СЭП в целом без ухудшения ее других технических характеристик. Применение предлагаемого технического решения позволяет решить эту сложную задачу.
Пример реализации способа эксплуатации никель-водородных аккумуляторных батарей при отсутствии штатной ТМИ.
При отсутствии штатной телеметрической информации в силу каких-либо технических причин для контроля состояния СЭП используют массив ИОК, содержащий в своем составе большое количество подмассивов различного назначения, в том числе и два подмассива телеметрических параметров СЭП. Первый подмассив параметров СЭП (подмассив контрольной телеметрической информации) формируют и отображают в ИОК только в случае срабатывания любого сигнального датчика давления АБi («CДВБi»), либо любого сигнального датчика минимального напряжения АБi («ДМНБi») или сигнального датчика минимального напряжения аккумулятора («ДМНАi»). При штатной работе СЭП этот подмассив при срабатывании сигнального датчика давления любой АБi отображает в ИОК информацию о текущей емкости АБi, состоянии сигнальных датчиков ДМНБi и ДМНAi, а также конфигурации СЭП (состояние коммутаторов АБi и аварийной шины). При срабатывании любого из датчиков минимального напряжения дополнительно выводится информация о напряжении и температуре АБi. Такой алгоритм формирования подмассива контрольной ТМИ позволяет судить о техническом состоянии всех АБ в случае изменения режима функционирования любой АБi.
Второй подмассив параметров СЭП (подмассив рабочей телеметрической информации) формируется и отображается автоматически в ИОК хотя бы один раз между двумя сеансами связи, а именно перед началом второго сеанса связи. Однако при необходимости через рабочую программу (РП) можно через заданные временные промежутки задавать нужную конфигурацию (состав и количество групп параметров АБ) этого подмассива и выводить его информацию принудительно. Это обстоятельство используют в процессе проведения ФЦ АБ. В режиме разряда формуемой АБ организуют не менее трех сеансов связи со съемом ИОК на каждом сеансе связи. Первый сеанс связи необходим для оценки исходного состояния формуемой АБ. Второй сеанс используют для определения средней скорости разряда формуемой АБ за один виток. Скорость разряда вычисляют как разность значений текущей емкости между двумя сеансами связи, поделенная на количество витков между этими сеансами связи. Третий сеанс связи служит для завершения режима разряда формуемой АБ. Зная среднюю скорость разряда формуемой АБ, прогнозируют длительность режима разряда и определяють номер витка N орбиты КА для фактического завершения глубокого разряда формуемой АБ. Однако РК для снятия запрета заряда формуемой АБ (завершения режима разряда) выдают на витке (N+1) либо на витке (N+2). Это позволяет глубоко разрядить формуемую АБ и достичь хороших результатов по выравниванию параметров ее аккумуляторов. При этом признаками гарантированного глубокого разряда являются следующие показатели: текущая емкость не превышает (5-10) % от номинального значения, ток разряда существенно меньше номинального значения и в идеальном случае равен нулю, напряжение формуемой АБ приблизительно равно (n+1) В, где n - количество аккумуляторов АБ. Эти сведения содержатся в составе ИОК в различных группах параметров АБ, но самая ценная информация отображается во втором съеме ИОК, поскольку она отражает состояние формуемой АБ на время завершения режима глубокого разряда. Второй съем ИОК осуществляют и после завершения режима восполнения формуемой АБ, если при этом производится изменение конфигурации СЭП.
Информация, содержащая во втором съеме ИОК, достаточна для контроля исполнения всех разовых команд в ходе проведения ФЦ АБ. Для этого используют группу информации, содержащую параметры конфигурации СЭП (состояние коммутаторов АБi и аварийной шины, отсутствие признака запрета заряда формуемой АБ). При таком способе эксплуатации НВАБ отпадает необходимость проведения дополнительного сеанса связи для контроля прохождения и исполнения РК, что очень важно с точки зрения экономии затрат на проведение сеансов связи.
Для оценки эффективности проведенного ФЦ АБ используют информацию, содержащую в составе подмассива контрольной ТМИ. При этом сравнивают максимальные значения текущей емкости и зарядного напряжения формуемой АБ, зафиксированные перед началом режима разряда и после завершения режима восполнения формуемой АБ.
Таким образом, применение предлагаемого способа эксплуатации никель-водородных аккумуляторных батарей системы электропитания КА с большим сроком активного существования в условиях отсутствия штатной телеметрической информации позволяет повысить его эффективность, при этом обеспечивая надежность эксплуатации НВАБ в частности и живучесть СЭП в целом как при штатной работе всех ЗРУ, так и при аномальной работе одного зарядно-разрядного устройства системы электропитания.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПАРАМЕТРАМИ АККУМУЛЯТОРОВ НИКЕЛЬ-ВОДОРОДНЫХ АККУМУЛЯТОРНЫХ БАТАРЕЙ СИСТЕМЫ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2586171C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ НИКЕЛЬ-ВОДОРОДНЫХ АККУМУЛЯТОРНЫХ БАТАРЕЙ СИСТЕМЫ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА (ВАРИАНТЫ) | 2011 |
|
RU2483400C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ НИКЕЛЬ-ВОДОРОДНЫХ АККУМУЛЯТОРНЫХ БАТАРЕЙ СИСТЕМЫ ЭЛЕКТРОПИТАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2621694C9 |
| СПОСОБ ЭКСПЛУАТАЦИИ НИКЕЛЬ-ВОДОРОДНЫХ АККУМУЛЯТОРНЫХ БАТАРЕЙ СИСТЕМЫ ЭЛЕКТРОПИТАНИЯ МОДУЛЬНОГО ИСПОЛНЕНИЯ (ВАРИАНТЫ) | 2014 |
|
RU2585171C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРАМЕТРАМИ АККУМУЛЯТОРОВ НИКЕЛЬ-ВОДОРОДНЫХ АККУМУЛЯТОРНЫХ БАТАРЕЙ СИСТЕМЫ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА (ВАРИАНТЫ) | 2014 |
|
RU2586172C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ НИКЕЛЬ-ВОДОРОДНЫХ АККУМУЛЯТОРНЫХ БАТАРЕЙ СИСТЕМЫ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2017 |
|
RU2661340C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ НИКЕЛЬ-ВОДОРОДНЫХ АККУМУЛЯТОРНЫХ БАТАРЕЙ СИСТЕМЫ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2019 |
|
RU2723302C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ НИКЕЛЬ-ВОДОРОДНЫХ АККУМУЛЯТОРНЫХ БАТАРЕЙ СИСТЕМЫ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2543487C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ НИКЕЛЬ-ВОДОРОДНЫХ АККУМУЛЯТОРНЫХ БАТАРЕЙ СИСТЕМЫ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2009 |
|
RU2399122C1 |
| СПОСОБ НАЗЕМНОЙ ЭКСПЛУАТАЦИИ АККУМУЛЯТОРНЫХ БАТАРЕЙ СИСТЕМЫ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2017 |
|
RU2661187C1 |
Использование: в области электротехники при эксплуатации никель-водородных аккумуляторных батарей (АБ) в автономных системах электропитания (СЭП) космических аппаратов (КА), функционирующих на низкой околоземной орбите. Технический результат - повышение эффективности управления зарядом/разрядом АБ. Согласно способу в случае отказа передающего устройства штатной бортовой системы телеметрической информации (БСТИ) в силу каких-либо технических причин для контроля состояния СЭП, в том числе и формуемой АБ, используют информацию контрольного и рабочего подмассивов из состава массива информации оперативного контроля (ИОК), формируемых и отображаемых в нем по исходным данным, выдаваемым БСТИ в бортовой комплекс управления. При этом в процессе проведения режима разряда формуемой АБ организуют не менее трех сеансов связи с КА со съемом ИОК на каждом сеансе связи. Указанные подмассивы, составленные из аналоговых и сигнальных параметров АБ, разбивают на отдельные информационные группы, отличающиеся друг от друга комбинацией параметров АБ, причем группы параметров АБ одного из подмассивов, представляющего собой контрольную телеметрическую информацию, формируют и отображают в составе массива ИОК по факту срабатывания либо сигнальных датчиков давления любой из n АБ, либо по факту срабатывания пороговых датчиков минимального напряжения любой АБ или минимального напряжения любого аккумулятора. Группы параметров АБ другого подмассива, представляющего собой рабочую телеметрическую информацию, формируют и отображают в составе массива ИОК в определенной временной последовательности, причем количество групп параметров АБ и временные промежутки между ними задают в составе рабочей программы (РП). Скорость разряда формуемой АБ вычисляют, используя данные массива ИОК, как минимум, с двух сеансов связи с КА, а по известной скорости разряда формуемой АБ определяют расчетный номер витка орбиты N для принудительной отмены режима глубокого разряда формуемой АБ. Разовые команды (РК), необходимые для фактического завершения режима разряда формуемой АБ, выдают в сеансе связи на витке (N+1) либо (N+2), причем в сеансах связи, в которых выдаются РК по управлению режимами функционирования формуемой АБ или изменению конфигурации СЭП с использованием коммутационной аппаратуры аварийной шины, осуществляют второй съем ИОК. При этом параметры АБ, отображаемые в составе ИОК, соответствуют моменту времени выдачи РК для второго съема ИОК. 2 ил.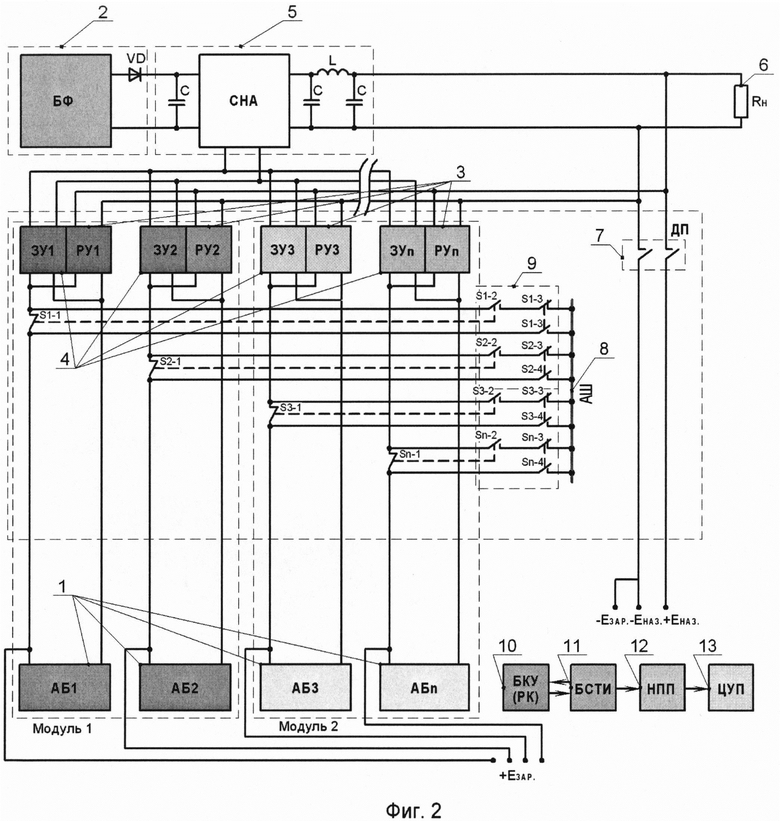
Способ эксплуатации никель-водородных аккумуляторных батарей системы электропитания (СЭП) космического аппарата (КА) с большим сроком активного существования, заключающийся в том, что две или более аккумуляторные батареи (АБ) циклируют в режиме заряда-разряда, задаваемом бортовой автоматикой системы электропитания; степень заряда АБ ограничивают по уровню срабатывания сигнальных датчиков давления, размещенных в отдельных аккумуляторах каждой АБ; контролируют параметры каждой АБ, например текущую электрическую емкость, напряжение, температуру; периодически один раз в 6-9 месяцев вводят запрет заряда для одной из АБ для выполнения формовочного цикла; в качестве разрядной нагрузки используют бортовую аппаратуру космического аппарата; критерием ограничения глубины разряда выбирают величину напряжения АБ равной n либо (n+1) В, где n - число аккумуляторов в АБ; значения зарядной емкости срабатывания сигнального датчика давления и максимального напряжения АБ при заряде, определяемые в процессе завершения формовочного цикла, используют для оценки состояния АБ и прогнозирования ее деградации; аналогичную последовательность операций повторяют для последующей АБ, а при аномальной работе зарядно-разрядного устройства (ЗРУ), связанной с отказом только зарядного устройства (или разрядного устройства), для проведения формовочного цикла АБ используют аварийную шину коммутационной аппаратуры, управляемой по разовым командам из наземного комплекса управления; заряд (разряд) формуемой АБ проводят путем подключения ее к любому зарядному устройству работоспособного ЗРУ, образующего с «собственной» АБ подсистему, при этом отключают от данной подсистемы «собственную» АБ с переводом ее в режим «саморазряда» на время восполнения (разряда) формуемой АБ до срабатывания сигнального датчика давления, а после восполнения формуемую АБ подсоединяют коммутационной аппаратурой аварийной шины к одному из работоспособных ЗРУ параллельно АБ этой подсистемы для дальнейшего функционирования системы электропитания, отличающийся тем, что в случае отказа передающего устройства штатной бортовой системы телеметрической информации (БСТИ) в силу каких-либо технических причин для контроля состояния СЭП, в том числе и формуемой АБ, используют информацию контрольного и рабочего подмассивов из состава массива информации оперативного контроля (ИОК), формируемых и отображаемых в нем по исходным данным, выдаваемым БСТИ в бортовой комплекс управления; при этом в процессе проведения режима разряда формуемой АБ организуют не менее трех сеансов связи с КА со съемом ИОК на каждом сеансе связи; указанные подмассивы, составленные из аналоговых и сигнальных параметров АБ, разбивают на отдельные информационные группы, отличающиеся друг от друга комбинацией параметров АБ; причем группы параметров АБ одного из подмассивов, представляющего собой контрольную телеметрическую информацию, формируют и отображают в составе массива ИОК по факту срабатывания либо сигнальных датчиков давления любой из n АБ, либо по факту срабатывания пороговых датчиков минимального напряжения любой АБ или минимального напряжения любого аккумулятора; при этом группы параметров АБ другого подмассива, представляющего собой рабочую телеметрическую информацию, формируют и отображают в составе массива ИОК в определенной временной последовательности, причем количество групп параметров АБ и временные промежутки между ними задают в составе рабочей программы (РП); скорость разряда формуемой АБ вычисляют, используя данные массива ИОК, как минимум, с двух сеансов связи с КА, а по известной скорости разряда формуемой АБ определяют расчетный номер витка орбиты N для принудительной отмены режима глубокого разряда формуемой АБ; при этом разовые команды (РК), необходимые для фактического завершения режима разряда формуемой АБ, выдают в сеансе связи на витке (N+1) либо (N+2); причем в сеансах связи, в которых выдаются РК по управлению режимами функционирования формуемой АБ или изменению конфигурации СЭП с использованием коммутационной аппаратуры аварийной шины, осуществляют второй съем ИОК; при этом параметры АБ, отображаемые в составе ИОК, соответствуют моменту времени выдачи РК для второго съема ИОК.
| СПОСОБ ЭКСПЛУАТАЦИИ НИКЕЛЬ-ВОДОРОДНЫХ АККУМУЛЯТОРНЫХ БАТАРЕЙ СИСТЕМЫ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА (ВАРИАНТЫ) | 2011 |
|
RU2483400C2 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2572396C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ НИКЕЛЬ-ВОДОРОДНЫХ АККУМУЛЯТОРНЫХ БАТАРЕЙ СИСТЕМЫ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2009 |
|
RU2399122C1 |
| US 2006132093A1, 22.06.2006. | |||

