[0001] Данная заявка основывается и притязает на приоритет заявки на патент Китая №201410571904.X, поданной 23 октября 2014 г., все содержание которой включается в этот документ посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
[0002] Настоящее раскрытие изобретения относится к области технологии интеллектуальных мобильных терминалов, а конкретнее, к способу управления съемкой и соответствующему устройству.
УРОВЕНЬ ТЕХНИКИ
[0003] С бурным развитием технологии фотографирования в интеллектуальных мобильных терминалах все большее количество людей используют для фотографирования интеллектуальный мобильный терминал.
[0004] Когда пользователь использует интеллектуальный мобильный терминал для съемки самого себя, пользователю нужно держать интеллектуальный мобильный терминал одной рукой и нажимать кнопку съемки другой рукой, что обременительно. В другом примере, когда пользователь использует для фотографирования интеллектуальный мобильный терминал с большим экраном и весом (например, планшетный компьютер), пользователю нужно удерживать интеллектуальный мобильный терминал обеими руками, соответственно, не имея возможности нажать кнопку съемки, что совершенно неудобно для съемки.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] Чтобы устранить проблемы в родственных технологиях, настоящее раскрытие изобретения предоставляет способ управления съемкой и соответствующее устройство. Техническое решение изложено ниже.
[0006] В соответствии с первым аспектом вариантов осуществления из настоящего раскрытия изобретения предоставляется способ управления съемкой для использования в интеллектуальном мобильном терминале, содержащий:
[0007] обнаружение, находится ли интеллектуальный мобильный терминал в состоянии съемки;
[0008] отправку команды получения действия интеллектуальному носимому устройству в случае обнаружения, что интеллектуальный мобильный терминал находится в состоянии съемки, причем команда получения действия конфигурируется для предоставления интеллектуальному носимому устройству возможности получить кривую собственного движения;
[0009] прием кривой движения, полученной интеллектуальным носимым устройством, и оценивание, является ли кривая движения предустановленной кривой движения; и
[0010] инициирование интеллектуального мобильного терминала для фотографирования, если кривая движения является предустановленной кривой движения.
[0011] Совместно с первым аспектом в первой возможной реализации в соответствии с первым аспектом способ дополнительно содержит:
[0012] контроль, принимается ли следующая кривая движения, отправленная из интеллектуального носимого устройства, если кривая движения не является предустановленной кривой движения; и
[0013] возврат к исполнению этапа оценивания, является ли кривая движения предустановленной кривой движения, если принимается следующая кривая движения, отправленная из интеллектуального носимого устройства.
[0014] Совместно с первым аспектом во второй возможной реализации в соответствии с первым аспектом способ дополнительно содержит:
[0015] отправку первой команды интеллектуальному носимому устройству, если кривая движения является предустановленной кривой движения, причем первая команда конфигурируется для предоставления интеллектуальному носимому устройству возможности подсказать оператору, что текущая съемка успешно инициируется.
[0016] Совместно с первым аспектом в третьей возможной реализации в соответствии с первым аспектом способ дополнительно содержит:
[0017] отправку команды прекращения обнаружения интеллектуальному носимому устройству, когда интеллектуальный мобильный терминал переключается из состояния съемки в несъемочное состояние при обнаружении, причем команда прекращения обнаружения конфигурируется для предоставления интеллектуальному носимому устройству возможности прекратить отправку кривой движения в реальном масштабе времени.
[0018] Совместно с первым аспектом в четвертой возможной реализации в соответствии с первым аспектом этап инициирования интеллектуального мобильного терминала для фотографирования, если кривая движения является предустановленной кривой движения, содержит:
[0019] инициирование интеллектуального мобильного терминала для однократного фотографирования, когда одна кривая движения интеллектуального носимого устройства, принятая в рамках первой предустановленной продолжительности, является предустановленной кривой движения, и инициирование интеллектуального мобильного терминала для непрерывного фотографирования, когда по меньшей мере две кривые движения интеллектуального носимого устройства, принятые в рамках первой предустановленной продолжительности, являются предустановленными кривыми движения;
[0020] или
[0021] если предустановленная кривая движения содержит первую предустановленную кривую движения и вторую предустановленную кривую движения, инициирование интеллектуального мобильного терминала для однократного фотографирования, когда кривая движения является первой предустановленной кривой движения, и инициирование интеллектуального мобильного терминала для непрерывного фотографирования, когда кривая движения является второй предустановленной кривой движения.
[0022] Совместно с первым аспектом в пятой возможной реализации в соответствии с первым аспектом способ дополнительно содержит:
[0023] прием операции задания оператором предустановленной кривой движения и формирование команды задания действия в соответствии с этой операцией;
[0024] отправку команды задания действия интеллектуальному носимому устройству, чтобы интеллектуальное носимое устройство получило текущую кривую собственного движения; и
[0025] прием текущей кривой движения, полученной интеллектуальным носимым устройством, и задание текущей кривой движения в качестве предустановленной кривой движения, причем предустановленная кривая движения конфигурируется для инициирования интеллектуального мобильного терминала для фотографирования.
[0026] В соответствии со вторым аспектом вариантов осуществления из настоящего раскрытия изобретения предоставляется способ управления съемкой для использования в интеллектуальном носимом устройстве, содержащий:
[0027] прием команды получения действия, отправленной из интеллектуального мобильного терминала, причем команда получения действия формируется интеллектуальным мобильным терминалом, когда интеллектуальный мобильный терминал обнаруживает себя в состоянии съемки; и
[0028] получение кривой движения самого интеллектуального носимого устройства в соответствии с командой получения действия и отправку полученной кривой движения интеллектуальному мобильному терминалу, чтобы инициировать интеллектуальный мобильный терминал для фотографирования, если интеллектуальный мобильный терминал оценивает, что кривая движения является предустановленной кривой движения.
[0029] Совместно со вторым аспектом в первой возможной реализации в соответствии со вторым аспектом способ дополнительно содержит:
[0030] прием команды прекращения обнаружения, отправленной из интеллектуального мобильного терминала, и прекращение отправки кривой движения самого интеллектуального носимого устройства в реальном масштабе времени в соответствии с командой прекращения обнаружения, причем команда прекращения обнаружения формируется, когда интеллектуальный мобильный терминал переключается из состояния съемки в несъемочное состояние при обнаружении;
[0031] или
[0032] прекращение отправки кривой движения самого интеллектуального носимого устройства в реальном масштабе времени, если команда прекращения обнаружения, отправленная из интеллектуального мобильного терминала, не принимается в рамках второй предустановленной продолжительности после приема команды получения действия.
[0033] Совместно со вторым аспектом во второй возможной реализации в соответствии со вторым аспектом способ дополнительно содержит:
[0034] прием первой команды, отправленной из интеллектуального мобильного терминала, и подсказку оператору, что текущая съемка успешно инициируется на основе первой команды, сформированной, когда интеллектуальный мобильный терминал обнаруживает, что кривая движения является предустановленной кривой движения.
[0035] Совместно со вторым аспектом в третьей возможной реализации в соответствии со вторым аспектом способ дополнительно содержит:
[0036] прием команды задания действия, отправленной из интеллектуального мобильного терминала, причем команда задания действия формируется интеллектуальным мобильным терминалом, когда интеллектуальный мобильный терминал обнаруживает такую операцию задания действия оператором; и
[0037] обнаружение текущей кривой движения самого интеллектуального носимого устройства в соответствии с командой задания действия и отправку текущей кривой движения интеллектуальному мобильному терминалу, чтобы интеллектуальный мобильный терминал задал текущую кривую движения в качестве предустановленной кривой движения.
[0038] В соответствии с третьим аспектом вариантов осуществления из настоящего раскрытия изобретения предоставляется устройство управления съемкой, содержащее:
[0039] первый модуль обнаружения, выполненный с возможностью обнаружения, находится ли интеллектуальный мобильный терминал в состоянии съемки;
[0040] первый модуль отправки, выполненный с возможностью отправки команды получения действия интеллектуальному носимому устройству в случае обнаружения, что интеллектуальный мобильный терминал находится в состоянии съемки, причем команда получения действия конфигурируется для предоставления интеллектуальному носимому устройству возможности получить кривую собственного движения;
[0041] первый модуль приема, выполненный с возможностью приема кривой движения, полученной интеллектуальным носимым устройством;
[0042] первый модуль оценки, выполненный с возможностью оценивания, является ли кривая движения предустановленной кривой движения; и
[0043] инициирующий модуль, выполненный с возможностью инициирования интеллектуального мобильного терминала для фотографирования, если кривая движения является предустановленной кривой движения.
[0044] Совместно с третьим аспектом в первой возможной реализации в соответствии с третьим аспектом устройство дополнительно содержит:
[0045] второй модуль оценки, выполненный с возможностью контроля, принимается ли следующая кривая движения, отправленная из интеллектуального носимого устройства, если кривая движения не является предустановленной кривой движения, и предоставления первому модулю оценки возможности оценить, является ли следующая кривая движения предустановленной кривой движения, если принимается следующая кривая движения, отправленная из интеллектуального носимого устройства.
[0046] Совместно с третьим аспектом во второй возможной реализации в соответствии с третьим аспектом устройство дополнительно содержит:
[0047] второй модуль отправки, выполненный с возможностью отправки первой команды интеллектуальному носимому устройству, если кривая движения является предустановленной кривой движения, причем первая команда конфигурируется для предоставления интеллектуальному носимому устройству возможности подсказать оператору, что текущая съемка успешно инициируется.
[0048] Совместно с третьим аспектом в третьей возможной реализации в соответствии с третьим аспектом устройство дополнительно содержит:
[0049] второй модуль обнаружения, выполненный с возможностью обнаружения, переключается ли интеллектуальный мобильный терминал из состояния съемки в несъемочное состояние; и
[0050] третий модуль отправки, выполненный с возможностью отправки команды прекращения обнаружения интеллектуальному носимому устройству, когда интеллектуальный мобильный терминал переключается из состояния съемки в несъемочное состояние при обнаружении, причем команда прекращения обнаружения конфигурируется для предоставления интеллектуальному носимому устройству возможности прекратить отправку кривой движения в реальном масштабе времени.
[0051] Совместно с третьим аспектом в четвертой возможной реализации в соответствии с третьим аспектом инициирующий модуль содержит: первый инициирующий подмодуль и второй инициирующий подмодуль;
[0052] первый инициирующий подмодуль выполнен с возможностью инициирования интеллектуального мобильного терминала для однократного фотографирования, когда одна кривая движения интеллектуального носимого устройства, принятая в рамках первой предустановленной продолжительности, является предустановленной кривой движения; а второй инициирующий подмодуль выполнен с возможностью инициирования интеллектуального мобильного терминала для непрерывного фотографирования, когда по меньшей мере две кривые движения интеллектуального носимого устройства, принятые в рамках первой предустановленной продолжительности, являются предустановленными кривыми движения; или
[0053] если предустановленная кривая движения включает в себя первую предустановленную кривую движения и вторую предустановленную кривую движения, то инициирующий модуль содержит: третий инициирующий подмодуль и четвертый инициирующий подмодуль;
[0054] третий инициирующий подмодуль выполнен с возможностью инициирования интеллектуального мобильного терминала для однократного фотографирования, когда кривая движения является первой предустановленной кривой движения, а четвертый инициирующий подмодуль выполнен с возможностью инициирования интеллектуального мобильного терминала для непрерывного фотографирования, когда кривая движения является второй предустановленной кривой движения.
[0055] Совместно с третьим аспектом в пятой возможной реализации в соответствии с третьим аспектом устройство дополнительно содержит:
[0056] модуль формирования команды задания, выполненный с возможностью приема такой операции задания оператором предустановленной кривой движения и для формирования команды задания действия в соответствии с этой операцией;
[0057] четвертый модуль отправки, выполненный с возможностью отправки команды задания действия интеллектуальному носимому устройству, чтобы интеллектуальное носимое устройство обнаружило текущую кривую собственного движения; и
[0058] второй модуль приема, выполненный с возможностью приема текущей кривой движения, отправленной из интеллектуального носимого устройства, и для задания текущей кривой движения в качестве предустановленной кривой движения.
[0059] В соответствии с четвертым аспектом вариантов осуществления из настоящего раскрытия изобретения предоставляется устройство управления съемкой для использования в интеллектуальном носимом устройстве, содержащее:
[0060] первый модуль приема, выполненный с возможностью приема команды получения действия, отправленной из интеллектуального мобильного терминала, причем команда получения действия формируется интеллектуальным мобильным терминалом, когда интеллектуальный мобильный терминал обнаруживает себя в состоянии съемки;
[0061] первый модуль получения, выполненный с возможностью получения кривой движения самого интеллектуального носимого устройства в соответствии с командой получения действия; и
[0062] первый модуль отправки, выполненный с возможностью отправки кривой движения интеллектуальному мобильному терминалу, чтобы инициировать интеллектуальный мобильный терминал для фотографирования, если интеллектуальный мобильный терминал оценивает, что кривая движения является предустановленной кривой движения.
[0063] Совместно с четвертым аспектом в первой возможной реализации в соответствии с четвертым аспектом устройство дополнительно содержит:
[0064] второй модуль приема, выполненный с возможностью приема команды прекращения обнаружения, отправленной из интеллектуального мобильного терминала;
[0065] первый модуль завершения, выполненный с возможностью прекращения отправки кривой движения самого интеллектуального носимого устройства в реальном масштабе времени в соответствии с командой прекращения обнаружения, причем команда прекращения обнаружения формируется интеллектуальным мобильным терминалом, когда интеллектуальный мобильный терминал обнаруживает себя переключенным из состояния съемки в несъемочное состояние;
[0066] или
[0067] второй модуль завершения, выполненный с возможностью прекращения отправки кривой движения самого интеллектуального носимого устройства в реальном масштабе времени, если команда прекращения обнаружения, отправленная из интеллектуального мобильного терминала, не принимается в рамках второй предустановленной продолжительности после приема команды получения действия.
[0068] Совместно с четвертым аспектом во второй возможной реализации в соответствии с четвертым аспектом устройство дополнительно содержит:
[0069] третий модуль приема, выполненный с возможностью приема первой команды, отправленной из интеллектуального мобильного терминала, причем первая команда формируется интеллектуальным мобильным терминалом, когда интеллектуальный мобильный терминал обнаруживает, что кривая движения является предустановленной кривой движения; и
[0070] модуль подсказки, выполненный с возможностью подсказки оператору, что текущая съемка успешно инициируется на основе первой команды.
[0071] Совместно с четвертым аспектом в третьей возможной реализации в соответствии с четвертым аспектом устройство дополнительно содержит:
[0072] четвертый модуль приема, выполненный с возможностью приема команды задания действия, отправленной из интеллектуального мобильного терминала, причем команда задания действия формируется интеллектуальным мобильным терминалом, когда интеллектуальный мобильный терминал обнаруживает такую операцию задания действия оператором; и
[0073] второй модуль обнаружения, выполненный с возможностью обнаружения текущей кривой движения самого интеллектуального носимого устройства в соответствии с командой задания действия и для отправки текущей кривой движения интеллектуальному мобильному терминалу, чтобы интеллектуальный мобильный терминал задал текущую кривую движения в качестве предустановленной кривой движения.
[0074] В соответствии с пятым аспектом вариантов осуществления из настоящего раскрытия изобретения предоставляется интеллектуальный мобильный терминал, содержащий: процессор; и запоминающее устройство для хранения команд, исполняемых процессором; в котором процессор выполнен с возможностью:
[0075] обнаружения, находится ли интеллектуальный мобильный терминал в состоянии съемки;
[0076] отправки команды получения действия интеллектуальному носимому устройству в случае обнаружения, что интеллектуальный мобильный терминал находится в состоянии съемки, причем команда получения действия предоставляет интеллектуальному носимому устройству возможность получить кривую собственного движения;
[0077] приема кривой движения, полученной интеллектуальным носимым устройством, и оценки, является ли кривая движения предустановленной кривой движения; и
[0078] инициирования интеллектуального мобильного терминала для фотографирования, если кривая движения является предустановленной кривой движения.
[0079] В соответствии с шестым аспектом вариантов осуществления из настоящего раскрытия изобретения предоставляется интеллектуальное носимое устройство, содержащее: процессор; и запоминающее устройство для хранения команд, исполняемых процессором; в котором процессор выполнен с возможностью:
[0080] приема команды получения действия, отправленной из интеллектуального мобильного терминала, причем команда получения действия формируется интеллектуальным мобильным терминалом, когда интеллектуальный мобильный терминал обнаруживает себя в состоянии съемки; и
[0081] получения кривой движения самого интеллектуального носимого устройства в соответствии с командой получения действия и отправки полученной кривой движения интеллектуальному мобильному терминалу, чтобы инициировать интеллектуальный мобильный терминал для фотографирования, если интеллектуальный мобильный терминал оценивает, что кривая движения является предустановленной кривой движения.
[0082] Техническое решение, предоставленное вариантами осуществления из настоящего раскрытия изобретения, может включать в себя следующие положительные результаты: способ управления съемкой может инициировать интеллектуальный мобильный терминал для фотографирования посредством интеллектуального носимого устройства. Интеллектуальный мобильный терминал в случае обнаружения себя в состоянии съемки инициирует интеллектуальное носимое устройство для получения кривой собственного движения. Интеллектуальное носимое устройство отправляет полученную кривую движения интеллектуальному мобильному терминалу. Потом интеллектуальный мобильный терминал инициируется для фотографирования, если обнаруживает, что кривая движения является предустановленной кривой движения. Из вышеупомянутого можно понять, что способ управления съемкой может автоматически инициировать интеллектуальный мобильный терминал для фотографирования путем обнаружения действия пользователя с помощью интеллектуального носимого устройства, чтобы интеллектуальный мобильный терминал мог фотографировать с помощью дистанционного управления, без инициирования пользователями кнопки съемки вручную в интеллектуальном мобильном терминале в процессе съемки, простом в действии и удобном для использования.
[0083] Нужно будет принять во внимание, что как предшествующее общее описание, так и последующее подробное описание являются лишь примерными и поясняющими и не ограничивают раскрытие изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0084] Прилагаемые чертежи, которые включаются в это описание изобретения и составляют его часть, иллюстрируют варианты осуществления в соответствии с изобретением и вместе с описанием служат для объяснения принципов изобретения.
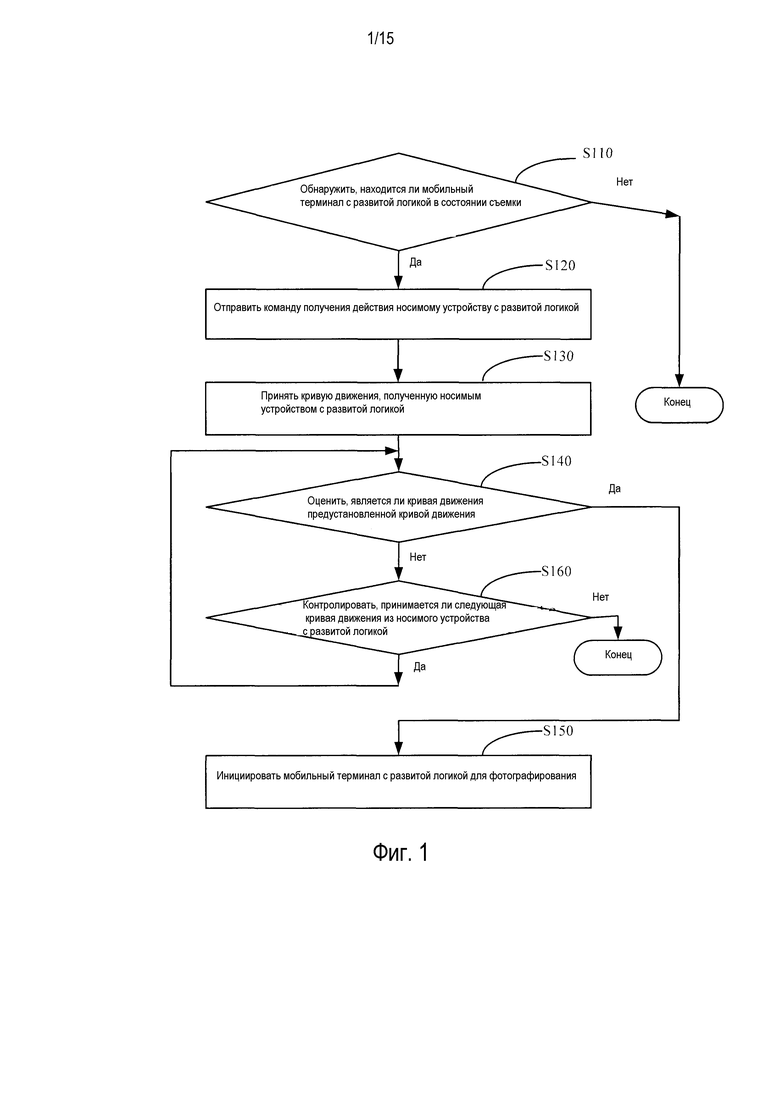
[0085] Фиг. 1 - блок-схема алгоритма способа управления съемкой в соответствии с примерным вариантом осуществления.
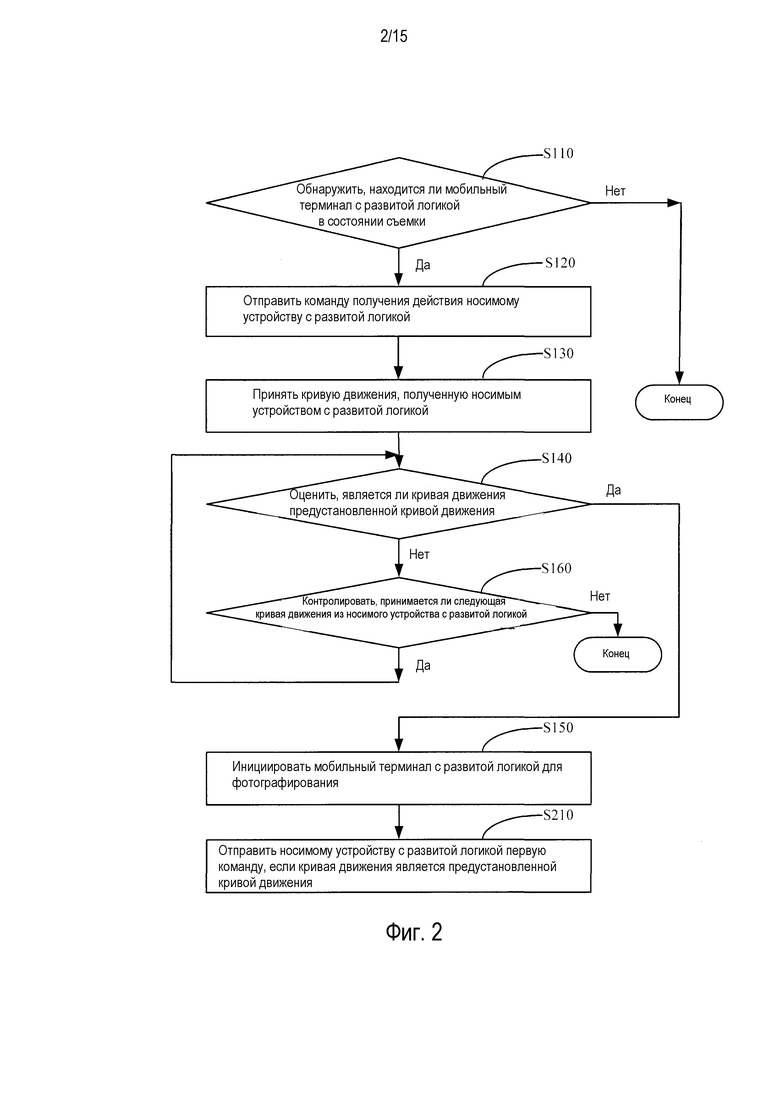
[0086] Фиг. 2 - блок-схема алгоритма другого способа управления съемкой в соответствии с примерным вариантом осуществления.
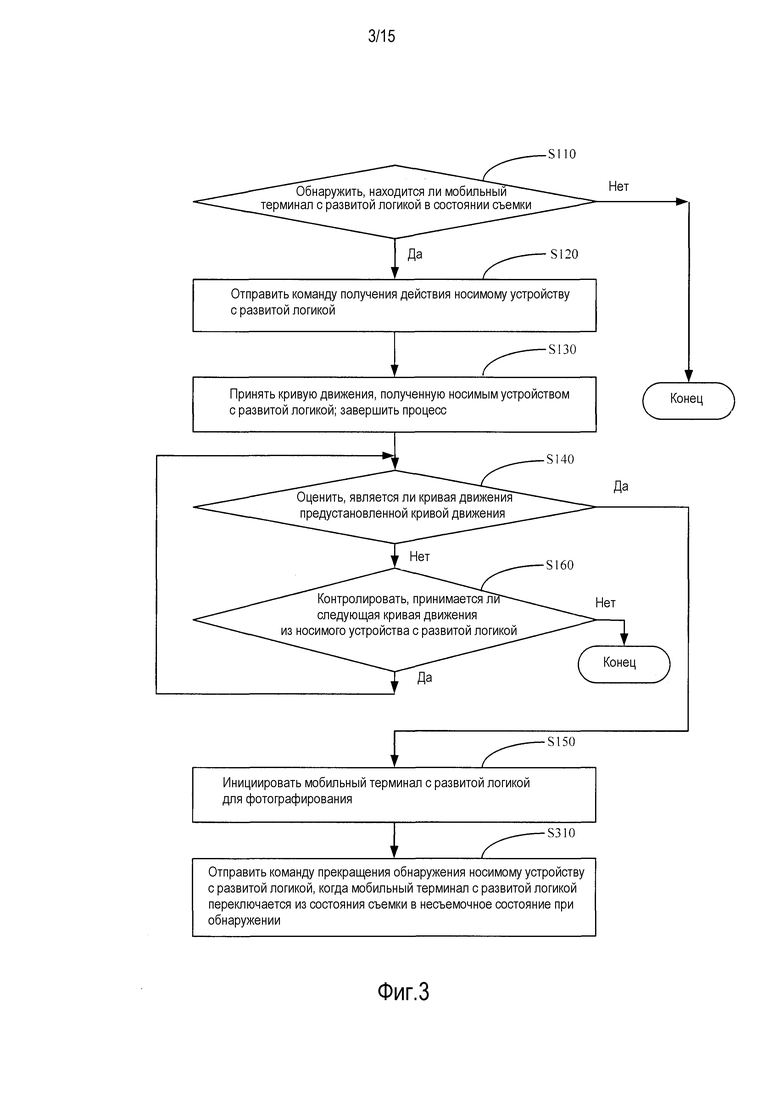
[0087] Фиг. 3 - блок-схема алгоритма дополнительного способа управления съемкой в соответствии с примерным вариантом осуществления.
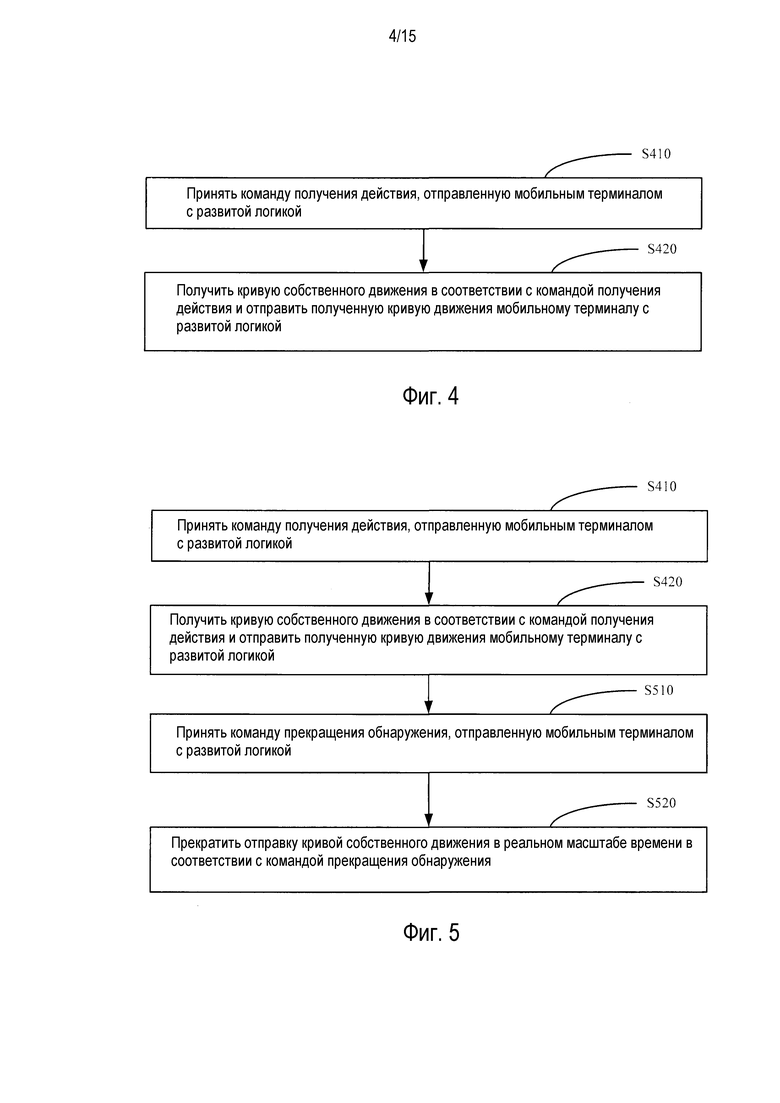
[0088] Фиг. 4 - блок-схема алгоритма способа управления съемкой в соответствии с примерным вариантом осуществления.
[0089] Фиг. 5 - блок-схема алгоритма другого способа управления съемкой в соответствии с примерным вариантом осуществления.
[0090] Фиг. 6 - блок-схема алгоритма дополнительного способа управления съемкой в соответствии с примерным вариантом осуществления.
[0091] Фиг. 7 - блок-схема алгоритма способа управления съемкой в соответствии с примерным вариантом осуществления.
[0092] Фиг. 8 - блок-схема устройства управления съемкой в соответствии с примерным вариантом осуществления.
[0093] Фиг. 9 - блок-схема другого устройства управления съемкой в соответствии с примерным вариантом осуществления.
[0094] Фиг. 10 - блок-схема дополнительного устройства управления съемкой в соответствии с примерным вариантом осуществления.
[0095] Фиг. 11 - блок-схема другого устройства управления съемкой в соответствии с примерным вариантом осуществления.
[0096] Фиг. 12 - блок-схема дополнительного устройства управления съемкой в соответствии с примерным вариантом осуществления.
[0097] Фиг. 13 - блок-схема устройства управления съемкой в соответствии с примерным вариантом осуществления.
[0098] Фиг. 14 - блок-схема другого устройства управления съемкой в соответствии с примерным вариантом осуществления.
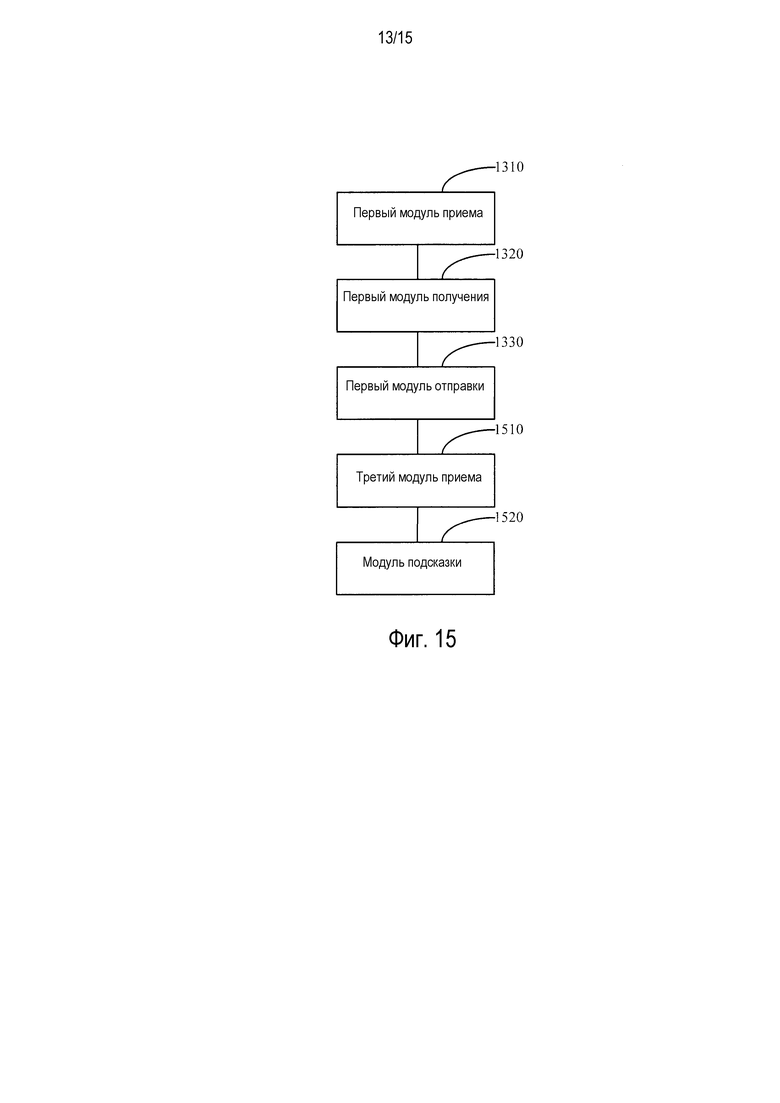
[0099] Фиг. 15 - блок-схема дополнительного устройства управления съемкой в соответствии с примерным вариантом осуществления.
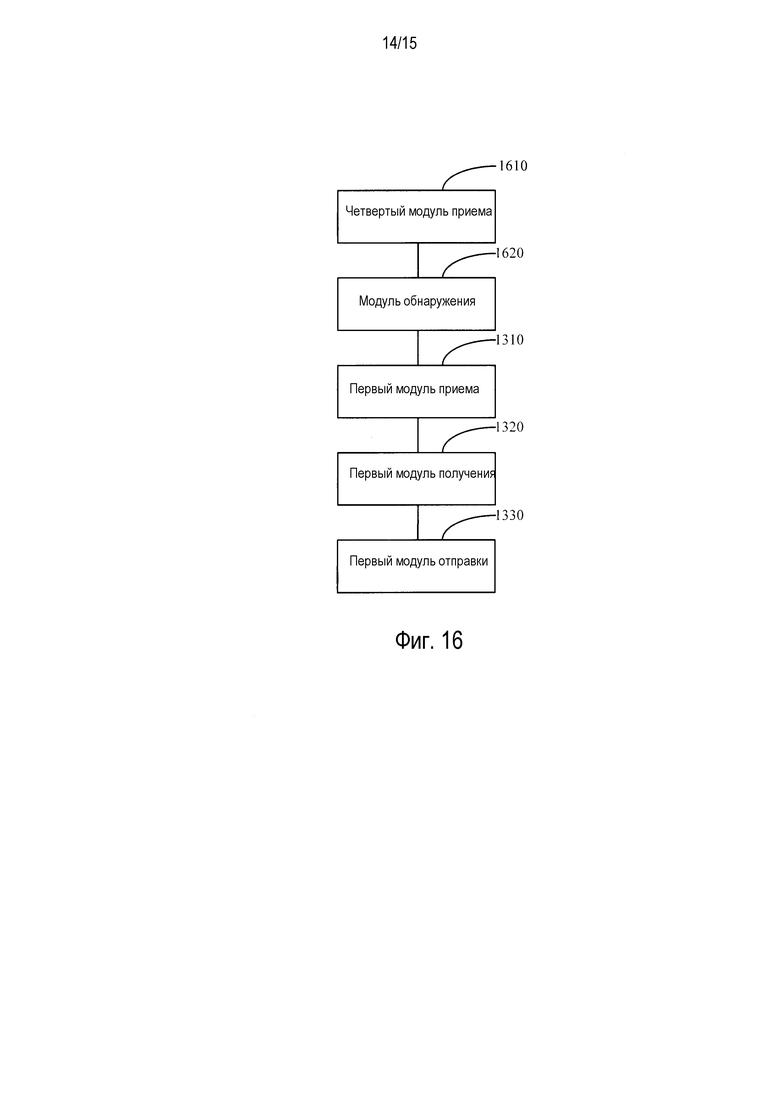
[00100] Фиг. 16 - блок-схема еще одного устройства управления съемкой в соответствии с примерным вариантом осуществления.
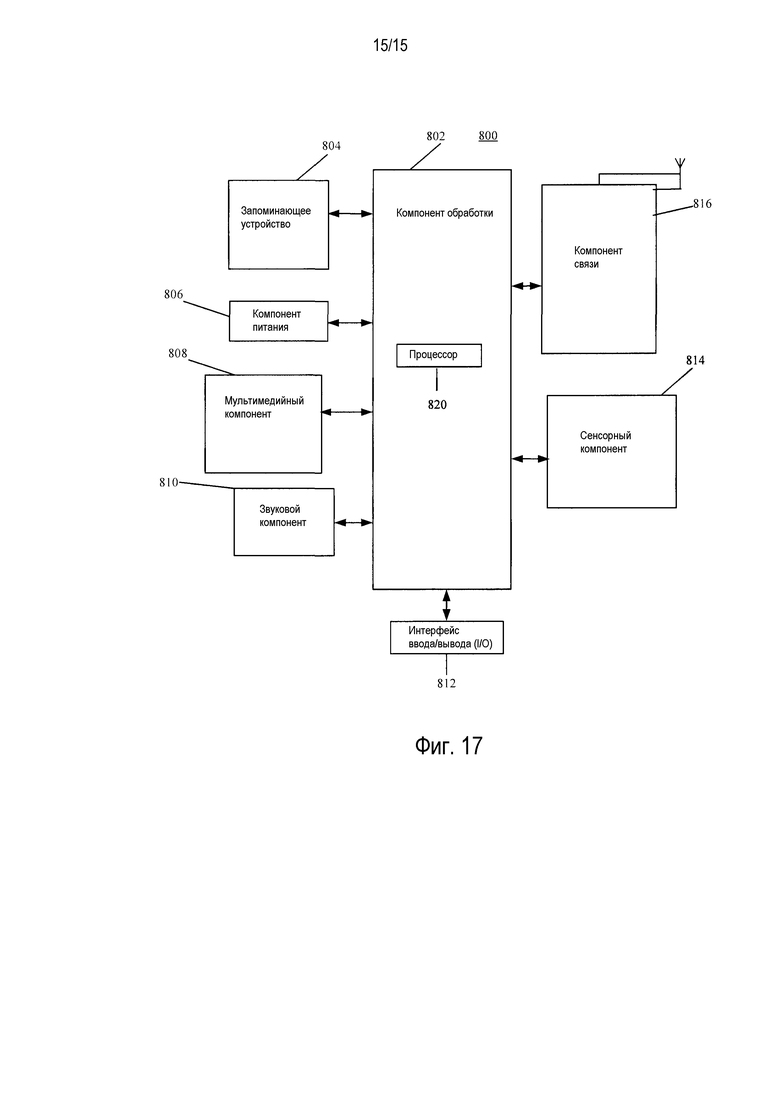
[00101] Фиг. 17 - блок-схема устройства, используемого для способа управления съемкой в соответствии с примерным вариантом осуществления.
[00102] Характерные варианты осуществления из настоящего раскрытия изобретения показаны с помощью вышеупомянутых чертежей, а более подробное описание будет представлено ниже. Эти чертежи никоим образом не предназначены для ограничения объема понимания настоящего раскрытия изобретения, а предназначены для иллюстрации идеи настоящего раскрытия изобретения для специалистов в данной области техники путем обращения к характерным вариантам осуществления.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[00103] Далее приводится подобное описание примерных вариантов осуществления, примеры которых иллюстрируются на прилагаемых чертежах. Нижеследующее описание ссылается на прилагаемые чертежи, на которых одинаковые цифры на разных чертежах представляют одинаковые или аналогичные элементы, пока не заявлено иное. Реализации, изложенные в нижеследующем описании примерных вариантов осуществления, не представляют все реализации в соответствии с раскрытием изобретения. Вместо этого они являются всего лишь примерами устройств и способов в соответствии с аспектами, связанными с раскрытием изобретения, которые перечислены в прилагаемой формуле изобретения.
[00104] Фиг. 1 - блок-схема алгоритма способа управления съемкой в соответствии с примерным вариантом осуществления. Способ применяется к интеллектуальному терминалу, например интеллектуальному мобильному терминалу (или мобильному терминалу с развитой логикой), который может быть интеллектуальным мобильным телефоном либо планшетным компьютером, и т.п. Варианты осуществления из настоящего раскрытия изобретения иллюстрируются, взяв в качестве примера интеллектуальный мобильный телефон. Как показано на фиг. 1, способ включает в себя следующие этапы для выполнения интеллектуальным мобильным терминалом:
[00105] На этапе S110 обнаруживается, находится ли интеллектуальный мобильный терминал в состоянии съемки. Способ переходит к этапу S120, если терминал находится в состоянии съемки. В противном случае процесс завершается, если терминал находится в несъемочном состоянии.
[00106] В примерном варианте осуществления из настоящего раскрытия изобретения интеллектуальный мобильный терминал может оценить, вызывается ли приложение камеры, и определить себя в состоянии съемки с помощью оценивания, что вызывается приложение камеры, или определить себя в несъемочном состоянии с помощью оценивания, что приложение камеры не вызывается.
[00107] В другом примерном варианте осуществления из настоящего раскрытия изобретения интеллектуальный мобильный терминал может оценить, вызывается ли экран дисплея приложением камеры, и определить себя в состоянии съемки с помощью оценивания, что экран дисплея вызывается приложением камеры, или определить себя в несъемочном состоянии с помощью оценивания, что экран дисплея не вызывается приложением камеры.
[00108] На этапе S120 команда получения действия отправляется интеллектуальному носимому устройству (или носимому устройству с развитой логикой). Команда получения действия конфигурируется для предоставления интеллектуальному носимому устройству возможности получить кривую собственного движения.
[00109] После обнаружения, что интеллектуальный мобильный терминал находится в состоянии съемки, команда получения действия отправляется интеллектуальному носимому устройству. После приема команды получения действия интеллектуальное носимое устройство начинает обнаружение кривой собственного движения, которая отражает действие оператора, носящего интеллектуальное носимое устройство.
[00110] Интеллектуальное носимое устройство может быть интеллектуальным браслетом, интеллектуальными очками или интеллектуальными часами, и т.п. Варианты осуществления из настоящего раскрытия изобретения иллюстрируются, взяв в качестве примера интеллектуальный браслет.
[00111] На этапе S130 принимается кривая движения, полученная интеллектуальным носимым устройством.
[00112] Интеллектуальное носимое устройство немедленно отправляет кривую движения интеллектуальному мобильному терминалу, как только кривая движения получена.
[00113] На этапе S140 оценивается, является ли кривая движения предустановленной кривой движения. Способ переходит к этапу S150, если кривая движения является предустановленной кривой движения. В противном случае способ переходит к этапу S160.
[00114] На этом этапе интеллектуальный мобильный терминал оценивает, является ли кривая движения предустановленной кривой движения, которую можно задать посредством интеллектуального носимого устройства, где процесс задания может включать в себя следующие этапы:
[00115] Этап 1) принимается такая операция задания оператором предустановленной кривой движения, и в соответствии с этой операцией формируется команда задания действия.
[00116] Этап 2) команда задания действия отправляется интеллектуальному носимому устройству, чтобы интеллектуальное носимое устройство получило текущую кривую собственного движения.
[00117] Этап 3) текущая кривая движения, полученная интеллектуальным носимым устройством, принимается и задается в качестве предустановленной кривой движения.
[00118] Например, пользователь инициирует функцию задания предустановленной кривой движения в интеллектуальном мобильном телефоне, чтобы сформировать соответствующую команду задания действия и отправить команду задания действия интеллектуальному браслету; на основе команды задания действия интеллектуальный браслет получает текущую кривую собственного движения и отправляет текущую кривую движения интеллектуальному мобильному телефону, который сохраняет текущую кривую движения и задает текущую кривую движения в качестве предустановленной кривой движения. Процесс задания предустановленной кривой движения аналогичен процессу задания секретного кода. Пользователь может исполнить текущую кривую движения еще раз, и если две кривые движения совпадают, то кривая движения устанавливается в качестве предустановленной кривой движения.
[00119] На этапе S150 интеллектуальный мобильный терминал инициируется для фотографирования.
[00120] В примерном варианте осуществления из настоящего раскрытия изобретения интеллектуальный мобильный терминал инициирует свое приложение камеры для фотографирования, если интеллектуальный мобильный терминал обнаруживает, что кривая движения, отправленная из интеллектуального носимого устройства, является предустановленной кривой движения.
[00121] В другом примерном варианте осуществления из настоящего раскрытия изобретения приложение камеры в интеллектуальном мобильном терминале инициируется для непрерывного фотографирования, если каждая из по меньшей мере двух кривых движения интеллектуального носимого устройства, принятых в рамках первой предустановленной продолжительности, является предустановленной кривой движения. Первая предустановленная продолжительность может задаваться свободно в соответствии с практическим применением, например, 1 минута. В этой ситуации пользователь может задать Пакетный режим (или Режим непрерывной съемки) у камеры как задействуемый многократным приемом предустановленной кривой движения, и задать количество раз для предустановленной кривой движения, например, по меньшей мере два раза. Если конкретно, то пользователь может задать запуск Пакетного режима в приложении камеры, когда количество раз обнаружения предустановленной кривой движения в течение 1 минуты равно двум.
[00122] В другом примерном варианте осуществления из настоящего раскрытия изобретения предустановленная кривая движения содержит первую предустановленную кривую движения и вторую предустановленную кривую движения. Первая предустановленная кривая движения конфигурируется для инициирования интеллектуального мобильного терминала для однократного фотографирования, тогда как вторая предустановленная кривая движения конфигурируется для инициирования интеллектуального мобильного терминала для непрерывного фотографирования.
[00123] На этапе S160 контролируется, принимается ли следующая кривая движения, отправленная из интеллектуального носимого устройства. Если да, то способ возвращается к исполнению этапа S140 до тех пор, пока не будет оценено, что кривая движения является предустановленной кривой движения. В противном случае процесс завершается.
[00124] Способ управления съемкой, предоставленный в настоящем варианте осуществления, инициирует интеллектуальное носимое устройство для обнаружения действия пользователя, когда интеллектуальный мобильный терминал обнаруживает себя в состоянии съемки. Интеллектуальное носимое устройство отправляет полученную кривую собственного движения интеллектуальному мобильному терминалу. Потом интеллектуальный мобильный терминал инициирует приложение камеры для фотографирования, если обнаруживает, что кривая движения является предустановленной кривой движения. Из вышеупомянутого можно понять, что способ управления съемкой может автоматически инициировать интеллектуальный мобильный терминал для фотографирования путем обнаружения действия пользователя с помощью интеллектуального носимого устройства, чтобы интеллектуальный мобильный терминал мог фотографировать с помощью дистанционного управления, без инициирования пользователями кнопки съемки вручную в интеллектуальном мобильном терминале в процессе съемки, простом в действии и удобном для использования.
[00125] Фиг. 2 - блок-схема алгоритма другого способа управления съемкой в соответствии с примерным вариантом осуществления. Способ применяется к интеллектуальному мобильному терминалу, как показано на фиг. 2, на основе варианта осуществления, который показан на фиг. 1; способ может дополнительно включать в себя этап S210.
[00126] На этапе S210 интеллектуальному носимому устройству отправляется первая команда, если кривая движения является предустановленной кривой движения. Первая команда дает интеллектуальному носимому устройству возможность подсказать оператору, что текущая съемка успешно инициируется. А именно, если кривая движения является предустановленной кривой движения, то пользователю отправляется подсказка посредством интеллектуального носимого устройства. Подсказка может быть вибрацией или звонком, и т.п.
[00127] Например, интеллектуальный браслет вибрирует после приема первой команды от интеллектуального мобильного телефона. Ощущая вибрацию интеллектуального браслета, пользователь узнает, что интеллектуальный мобильный телефон успешно инициируется с использованием предустановленной кривой движения для фотографирования.
[00128] Следует пояснить, что настоящее раскрытие изобретения не ограничивает строго последовательность исполнения этапа S210 и этапа S150. Другими словами, этап S210 может исполняться перед этапом S150, или этап S150 может исполняться перед этапом S210, или этап S210 и S150 могут исполняться одновременно.
[00129] В способе управления съемкой, предоставленном в настоящем варианте осуществления, после того как интеллектуальный мобильный терминал оценивает, что отправленная из интеллектуального носимого устройства кривая движения является предустановленной кривой движения, интеллектуальное носимое устройство отправляет пользователю подсказку, указывающую успешно инициированную съемку. Таким образом, после приема подсказки пользователь сразу узнает, что только что совершенное действие распознано интеллектуальным мобильным терминалом, соответственно инициируя фотографирование. Следует избегать следующего явления: пользователь продолжает совершать предустановленное действие, так как пользователь не знает, успешно ли инициировано фотографирование, соответственно побуждая интеллектуальное носимое устройство продолжать обнаружение кривой собственного движения, и интеллектуальный мобильный терминал продолжает обработку кривой движения, отправленной из интеллектуального носимого устройства, соответственно приводя к бесполезному расходу ресурсов интеллектуального носимого устройства и интеллектуального мобильного терминала.
[00130] Фиг. 3 - блок-схема алгоритма дополнительного способа управления съемкой в соответствии с примерным вариантом осуществления. Способ применяется к интеллектуальному мобильному терминалу, как показано на фиг. 3, на основе варианта осуществления, который показан на фиг. 1, способ может дополнительно включать в себя следующие этапы.
[00131] На этапе S310 команда прекращения обнаружения отправляется интеллектуальному носимому устройству, когда интеллектуальный мобильный терминал переключается из состояния съемки в несъемочное состояние при обнаружении. Команда прекращения обнаружения дает интеллектуальному носимому устройству возможность прекратить отправку кривой движения.
[00132] Команда прекращения обнаружения отправляется интеллектуальному носимому устройству, когда интеллектуальный мобильный терминал переключается из состояния съемки в несъемочное состояние при обнаружении. Команда прекращения обнаружения дает интеллектуальному носимому устройству возможность прекратить обнаружение и отправку кривой собственного движения. В противном случае способ переходит к обнаружению, переключается ли интеллектуальный мобильный терминал из состояния съемки в несъемочное состояние после интервала с третьей предустановленной продолжительностью.
[00133] Третья предустановленная продолжительность может задаваться свободно в соответствии с фактической потребностью, например, 40 с. После приема команды прекращения обнаружения, отправленной из интеллектуального мобильного телефона, интеллектуальный браслет больше не будет обнаруживать действие пользователя.
[00134] Следует пояснить, что новый вариант осуществления получается путем добавления этапа S310 на основе варианта осуществления, который показан на фиг. 2.
[00135] В способе управления съемкой, предоставленном в настоящем варианте осуществления, когда интеллектуальный мобильный терминал обнаруживает, что приложение камеры переключается из состояния съемки в несъемочное состояние, интеллектуальный мобильный терминал отправляет команду прекращения обнаружения интеллектуальному носимому устройству, чтобы интеллектуальное носимое устройство прекратило получение и отправку кривой собственного движения, чтобы препятствовать продолжению обнаружения интеллектуальным носимым устройством действия пользователя и, соответственно, использованию большого количества ресурсов интеллектуального носимого устройства.
[00136] В соответствии с вышеупомянутым способом управления съемкой, основанным на интеллектуальном мобильном терминале, настоящее раскрытие изобретения предоставляет также варианты осуществления способа управления съемкой, основанного на интеллектуальном мобильном терминале и применяемого к интеллектуальному носимому устройству.
[00137] Фиг. 4 - блок-схема алгоритма способа управления съемкой в соответствии с примерным вариантом осуществления. Способ применяется к интеллектуальному носимому устройству, например интеллектуальному браслету, интеллектуальным очкам или интеллектуальным часам, и так далее. Варианты осуществления из настоящего раскрытия изобретения иллюстрируются, взяв в качестве примера интеллектуальный браслет. Как показано на фиг. 4, способ может включать в себя следующие этапы для выполнения интеллектуальным носимым устройством.
[00138] На этапе S410 принимается команда получения действия, отправленная из интеллектуального мобильного терминала. Команда получения действия формируется интеллектуальным мобильным терминалом, когда интеллектуальный мобильный терминал обнаруживает себя в состоянии съемки.
[00139] Интеллектуальный мобильный терминал может быть интеллектуальным мобильным телефоном или планшетным компьютером, и т.п. Варианты осуществления из настоящего раскрытия изобретения иллюстрируются, взяв в качестве примера интеллектуальный мобильный телефон.
[00140] На этапе S420 кривая собственного движения получается в соответствии с командой получения действия и отправляется интеллектуальному мобильному терминалу, чтобы инициировать интеллектуальный мобильный терминал для фотографирования, если интеллектуальный мобильный терминал оценивает, что кривая движения является предустановленной кривой движения.
[00141] После приема команды получения действия, отправленной из интеллектуального мобильного телефона, интеллектуальный браслет начинает получение действия владельца интеллектуального браслета и отправляет полученную кривую движения интеллектуальному мобильному телефону, который оценивает, является ли кривая движения предустановленной кривой движения, и инициирует приложение камеры в интеллектуальном мобильном телефоне для фотографирования, если кривая движения является предустановленной кривой движения.
[00142] В вариантах осуществления из настоящего раскрытия изобретения этап задания предустановленной кривой движения для инициирования интеллектуального мобильного терминала для фотографирования посредством интеллектуального носимого устройства может включать в себя следующие этапы:
[00143] этап 11) принимается команда задания действия, отправленная из интеллектуального мобильного терминала, причем команда задания действия формируется интеллектуальным мобильным терминалом, когда интеллектуальный мобильный терминал обнаруживает операцию задания действия оператором; и
[00144] этап 12) текущая кривая собственного движения получается в соответствии с командой задания действия и отправляется интеллектуальному мобильному терминалу, чтобы интеллектуальный мобильный терминал задал текущую кривую движения в качестве предустановленной кривой движения. Предустановленная инициирующая кривая движения конфигурируется для инициирования интеллектуального мобильного терминала для фотографирования.
[00145] Способ управления съемкой, предоставленный в настоящем варианте осуществления, может инициировать интеллектуальный мобильный терминал для фотографирования посредством интеллектуального носимого устройства. Если конкретно, то интеллектуальный мобильный терминал инициирует интеллектуальное носимое устройство для обнаружения действия пользователя, когда терминал обнаруживает себя в состоянии съемки. Интеллектуальное носимое устройство отправляет обнаруженную кривую движения пользователя интеллектуальному мобильному терминалу. Потом интеллектуальный мобильный терминал инициирует приложение камеры для фотографирования, если обнаруживает, что кривая движения является предустановленной кривой движения. Из вышеупомянутого можно понять, что способ управления съемкой может автоматически инициировать интеллектуальный мобильный терминал для фотографирования путем обнаружения действия пользователя с помощью интеллектуального носимого устройства, чтобы интеллектуальный мобильный терминал мог фотографировать с помощью дистанционного управления, без инициирования пользователями кнопки съемки вручную в интеллектуальном мобильном терминале в процессе съемки, простом в действии и удобном для использования.
[00146] Фиг. 5 - блок-схема алгоритма другого способа управления съемкой в соответствии с примерным вариантом осуществления. Способ применяется к интеллектуальному носимому устройству, как показано на фиг. 5, на основе варианта осуществления, который показан на фиг. 4, при этом способ может дополнительно включать в себя следующие этапы.
[00147] На этапе S510 принимается команда прекращения обнаружения, отправленная из интеллектуального мобильного терминала. Команда прекращения обнаружения формируется интеллектуальным мобильным терминалом, когда интеллектуальный мобильный терминал обнаруживает, что приложение камеры переключается из состояния съемки в несъемочное состояние.
[00148] Когда интеллектуальный мобильный телефон обнаруживает себя переключенным из состояния съемки в несъемочное состояние, он отправляет команду прекращения обнаружения интеллектуальному браслету.
[00149] На этапе S520 кривая собственного движения в реальном масштабе времени больше не отправляется в соответствии с командой прекращения обнаружения.
[00150] После приема команды прекращения обнаружения интеллектуальный браслет прекращает обнаружение действия владельца интеллектуального браслета и прекращает отправку кривой собственного движения в реальном масштабе времени.
[00151] В другом варианте осуществления из настоящего раскрытия изобретения интеллектуальный браслет начинает отсчет времени после приема команды получения действия и автоматически прекращает обнаружение кривой движения интеллектуального носимого устройства, если команда прекращения обнаружения, отправленная из интеллектуального мобильного терминала, не принимается в рамках второй предустановленной продолжительности.
[00152] В способе управления съемкой, предоставленном в настоящем варианте осуществления, если текущее состояние удовлетворяет условию для прекращения обнаружения, то прекращается обнаружение действия владельца интеллектуального носимого устройства, экономя таким образом ресурсы процессора интеллектуального носимого устройства и электрическую энергию. Условие прекращения обнаружения включает в себя прием команды прекращения обнаружения, отправленной из интеллектуального мобильного терминала, или отсутствие приема команды прекращения обнаружения в рамках второй предустановленной продолжительности после приема команды получения действия.
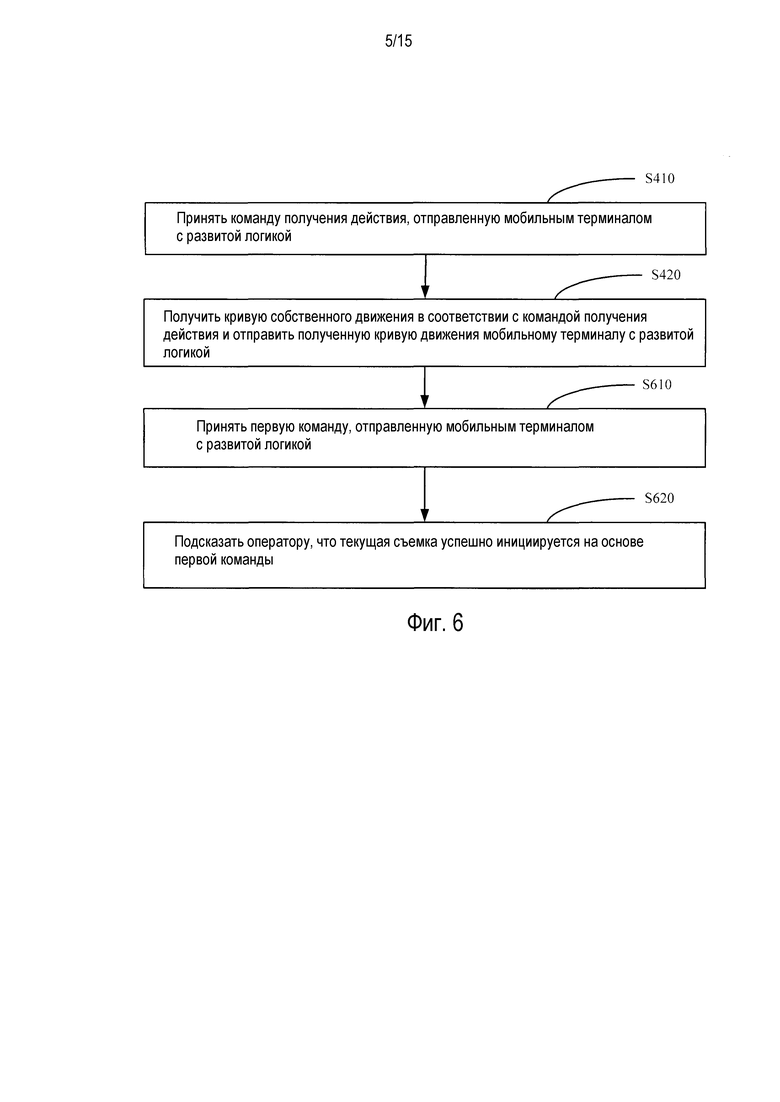
[00153] Фиг. 6 - блок-схема алгоритма дополнительного способа управления съемкой в соответствии с примерным вариантом осуществления. Способ применяется к интеллектуальному носимому устройству, как показано на фиг. 6, на основе варианта осуществления, который показан на фиг. 4, при этом способ может дополнительно включать в себя следующие этапы.
[00154] На этапе S610 принимается первая команда, отправленная из интеллектуального мобильного терминала. Первая команда формируется интеллектуальным мобильным терминалом, когда интеллектуальный мобильный терминал обнаруживает, что полученная интеллектуальным носимым устройством кривая движения является предустановленной кривой движения.
[00155] На этапе S620 оператору подсказывают, что текущая съемка успешно инициируется на основе первой команды.
[00156] Например, интеллектуальный браслет вибрирует после приема первой команды от интеллектуального мобильного телефона. Ощущая вибрацию интеллектуального браслета, пользователь узнает, что интеллектуальный мобильный телефон успешно инициируется с использованием предустановленной кривой движения для фотографирования.
[00157] В способе управления съемкой, предоставленном в настоящем варианте осуществления, когда принимается первая команда, отправленная из интеллектуального мобильного терминала, пользователю подсказывают, что фотографирование успешно инициируется, препятствуя, таким образом, продолжению совершения пользователем предустановленного действия, препятствуя продолжению обнаружения интеллектуальным носимым устройством действия пользователя и препятствуя продолжению оценивания интеллектуальным мобильным терминалом, является ли принятая кривая движения предустановленной кривой движения. Таким образом, можно дополнительно сэкономить ресурсы процессора интеллектуального носимого устройства и электрическую энергию.
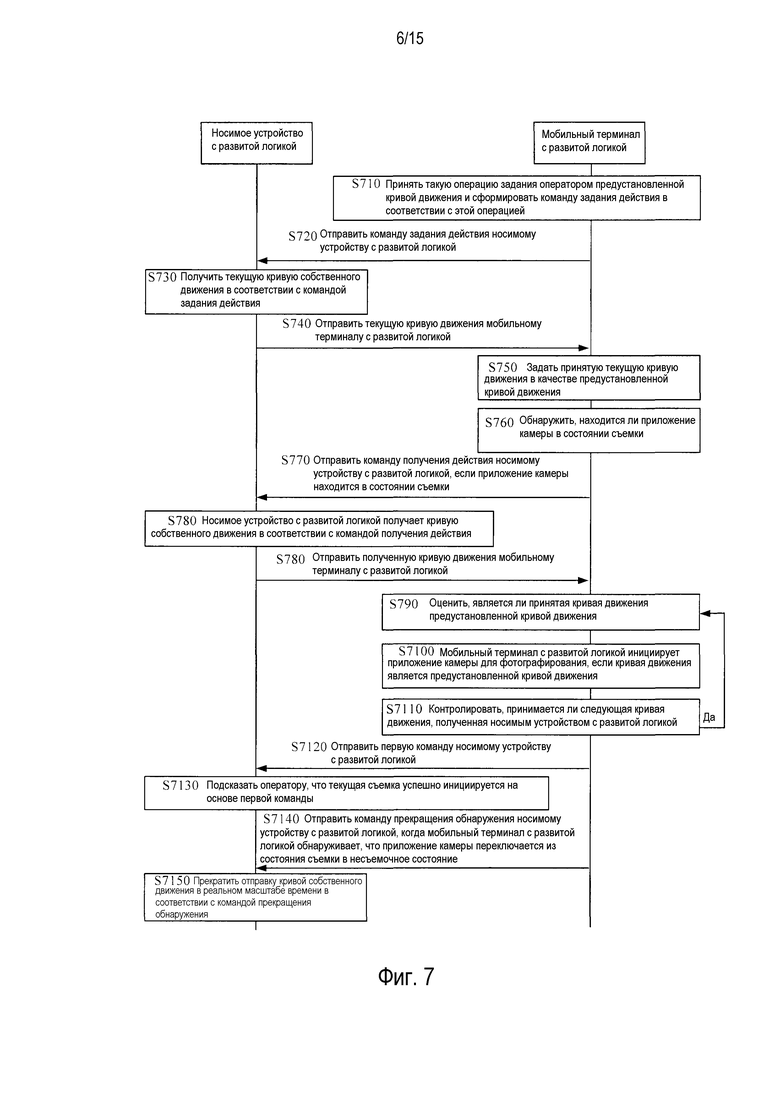
[00158] Фиг. 7 - блок-схема алгоритма способа управления съемкой в соответствии с примерным вариантом осуществления. Способ применяется системе, содержащей интеллектуальный мобильный терминал и интеллектуальное носимое устройство, как показано на фиг. 7, при этом способ включает в себя следующие этапы.
[00159] На этапе S710 интеллектуальный мобильный терминал принимает такую операцию задания оператором предустановленной кривой движения и формирует команду задания действия в соответствии с этой операцией.
[00160] На этапе S720 интеллектуальный мобильный терминал отправляет команду задания действия интеллектуальному носимому устройству.
[00161] На этапе S730 интеллектуальное носимое устройство получает текущую кривую собственного движения в соответствии с командой задания действия.
[00162] На этапе S740 интеллектуальное носимое устройство отправляет текущую кривую движения интеллектуальному мобильному терминалу.
[00163] На этапе S750 интеллектуальный мобильный терминал задает текущую кривую движения в качестве предустановленной кривой движения.
[00164] На этапе S760 интеллектуальный мобильный терминал обнаруживает, находится ли его приложение камеры в состоянии съемки. Способ переходит к этапу S770, если приложение камеры находится в состоянии съемки. Процесс завершается, если приложение камеры находится в несъемочном состоянии.
[00165] На этапе S770 интеллектуальный мобильный терминал отправляет команду получения действия интеллектуальному носимому устройству, если приложение камеры находится в состоянии съемки.
[00166] На этапе S780 интеллектуальное носимое устройство получает кривую собственного движения в соответствии с командой получения действия и отправляет полученную кривую движения интеллектуальному мобильному терминалу.
[00167] На этапе S790 интеллектуальный мобильный терминал оценивает, является ли принятая кривая движения предустановленной кривой движения. Способ переходит к этапу S7100, если принятая кривая движения является предустановленной кривой движения. Способ переходит к этапу S7110, если принятая кривая движения не является предустановленной кривой движения.
[00168] На этапе S7100 интеллектуальный мобильный терминал инициирует приложение камеры для фотографирования, если кривая движения является предустановленной кривой движения. Потом способ переходит к этапу S7120.
[00169] На этапе S7110 интеллектуальный мобильный терминал контролирует, принимается ли следующая кривая движения, полученная интеллектуальным носимым устройством. Если да, то способ переходит к этапу S790. В противном случае процесс завершается.
[00170] На этапе S7120 интеллектуальный мобильный терминал отправляет первую команду интеллектуальному носимому устройству.
[00171] На этапе S7130 интеллектуальное носимое устройство подсказывает оператору, что текущая съемка успешно инициируется на основе первой команды.
[00172] На этапе S7140 интеллектуальный мобильный терминал отправляет команду прекращения обнаружения интеллектуальному носимому устройству, когда интеллектуальный мобильный терминал обнаруживает, что приложение камеры переключается из состояния съемки в несъемочное состояние.
[00173] На этапе S7150 интеллектуальное носимое устройство прекращает отправку кривой собственного движения в реальном масштабе времени в соответствии с командой прекращения обнаружения.
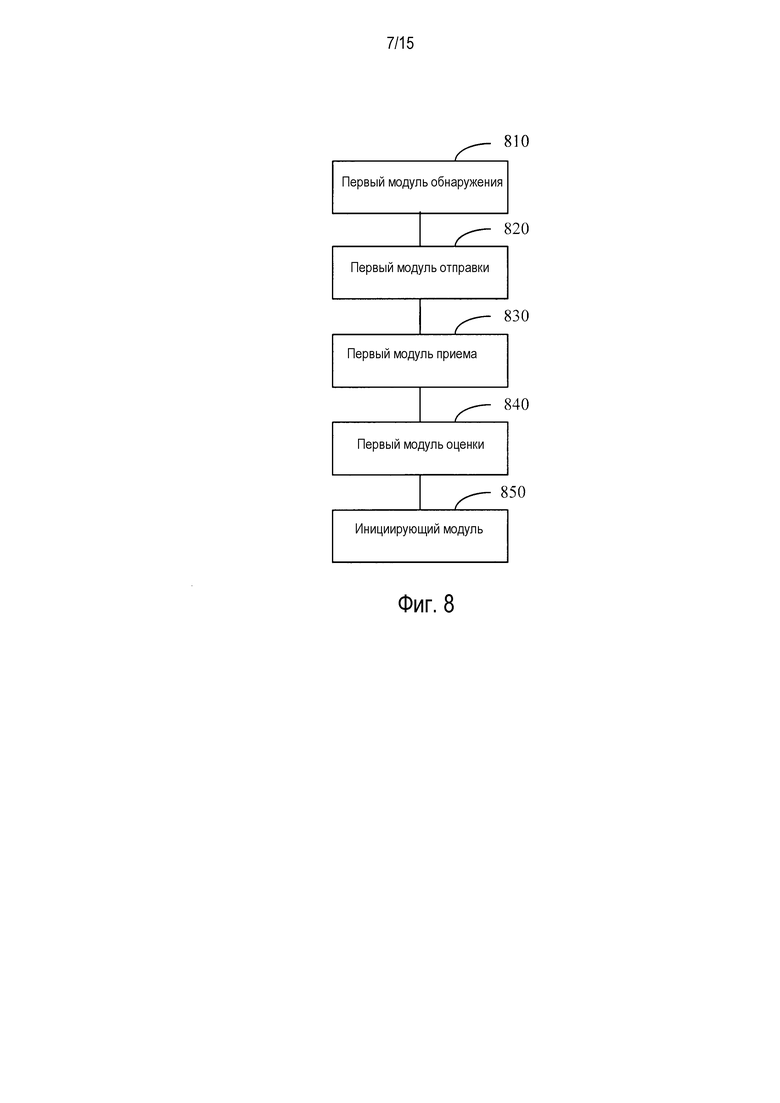
[00174] Фиг. 8 - блок-схема устройства управления съемкой в соответствии с примерным вариантом осуществления. Устройство может быть интеллектуальным терминалом, например интеллектуальным мобильным терминалом, или может применяться к нему. Как показано на фиг. 8, устройство содержит: первый модуль 810 обнаружения, первый модуль 820 отправки, первый модуль 830 приема, первый модуль 840 оценки и инициирующий модуль 850.
[00175] Первый модуль 810 обнаружения выполнен с возможностью обнаружения, находится ли интеллектуальный мобильный терминал в состоянии съемки.
[00176] Первый модуль 820 отправки выполнен с возможностью отправки команды получения действия интеллектуальному носимому устройству, когда первый модуль 810 обнаружения обнаруживает, что интеллектуальный мобильный терминал находится в состоянии съемки. Команда получения действия предоставляет интеллектуальному носимому устройству возможность получить кривую собственного движения.
[00177] Первый модуль 830 приема выполнен с возможностью приема кривой движения, полученной интеллектуальным носимым устройством.
[00178] Первый модуль 840 оценки выполнен с возможностью оценивания, является ли принятая первым модулем 830 приема кривая движения предустановленной кривой движения.
[00179] Инициирующий модуль 850 выполнен с возможностью инициирования интеллектуального мобильного терминала для фотографирования, если первый модуль 840 оценки оценивает, что кривая движения является предустановленной кривой движения.
[00180] В примерном варианте осуществления из настоящего раскрытия изобретения интеллектуальный мобильный терминал инициируется для фотографирования, если первый модуль 840 оценки оценивает, что кривая движения является предустановленной кривой движения.
[00181] В другом примерном варианте осуществления из настоящего раскрытия изобретения инициирующий модуль 850 содержит: первый инициирующий подмодуль и второй инициирующий подмодуль.
[00182] Первый инициирующий подмодуль выполнен с возможностью инициирования интеллектуального мобильного терминала для однократного фотографирования, когда одна кривая движения интеллектуального носимого устройства, принятая в рамках первой предустановленной продолжительности, является предустановленной кривой движения.
[00183] Второй инициирующий подмодуль выполнен с возможностью инициирования интеллектуального мобильного терминала для непрерывного фотографирования, когда по меньшей мере две кривые движения, принятые в рамках первой предустановленной продолжительности, являются предустановленными кривыми движения.
[00184] В другом примерном варианте осуществления из настоящего раскрытия изобретения предустановленная кривая движения содержит первую предустановленную кривую движения и вторую предустановленную кривую движения. Инициирующий модуль 850 содержит: третий инициирующий подмодуль и четвертый инициирующий подмодуль.
[00185] Третий инициирующий подмодуль выполнен с возможностью инициирования интеллектуального мобильного терминала для однократного фотографирования, если кривая движения является первой предустановленной кривой движения.
[00186] Четвертый инициирующий подмодуль выполнен с возможностью инициирования интеллектуального мобильного терминала для непрерывного фотографирования, если кривая движения является второй предустановленной кривой движения.
[00187] Устройство управления съемкой, предоставленное настоящим вариантом осуществления, может инициировать интеллектуальное носимое устройство для получения кривой собственного движения, когда интеллектуальный мобильный терминал обнаруживает, что его приложение камеры находится в состоянии съемки. Интеллектуальное носимое устройство отправляет полученную кривую движения интеллектуальному мобильному терминалу. Потом приложение камеры инициируется для фотографирования, если интеллектуальный мобильный терминал оценивает, что кривая движения является предустановленной кривой движения. Из вышеупомянутого можно понять, что устройство управления съемкой может автоматически инициировать интеллектуальный мобильный терминал для фотографирования путем обнаружения действия пользователя с помощью интеллектуального носимого устройства, чтобы интеллектуальный мобильный терминал мог фотографировать с помощью дистанционного управления, без инициирования пользователем кнопки съемки вручную в интеллектуальном мобильном терминале в процессе съемки, простом в действии и удобном для использования.
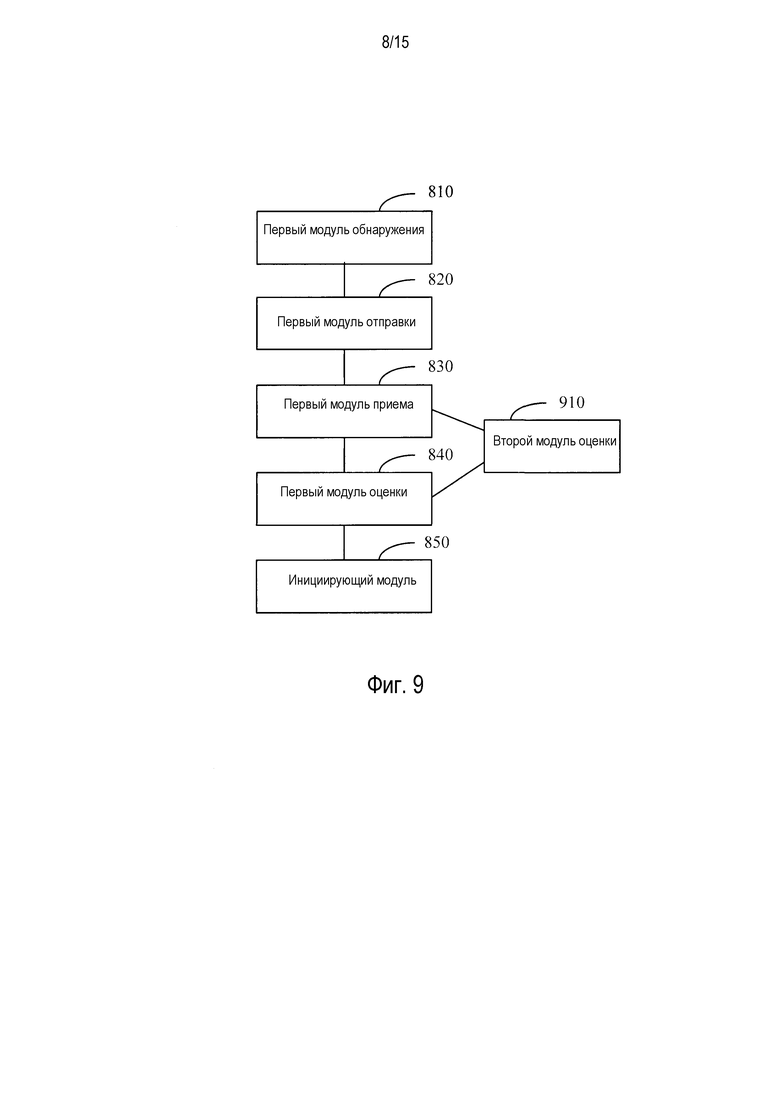
[00188] Фиг. 9 - блок-схема другого устройства управления съемкой в соответствии с примерным вариантом осуществления. Устройство может быть интеллектуальным мобильным терминалом или может применяться к нему, как показано на фиг. 9, на основе варианта осуществления, который показан на фиг. 8; устройство может дополнительно включать в себя второй модуль 910 оценки.
[00189] Второй модуль 910 оценки выполнен с возможностью оценивания, принимается ли следующая кривая движения, отправленная из интеллектуального носимого устройства, если первый модуль 840 оценки оценивает, что кривая движения не является предустановленной кривой движения, и предоставления первому модулю оценки возможности оценить, является ли следующая кривая движения предустановленной кривой движения, если принимается следующая кривая движения, отправленная из интеллектуального носимого устройства.
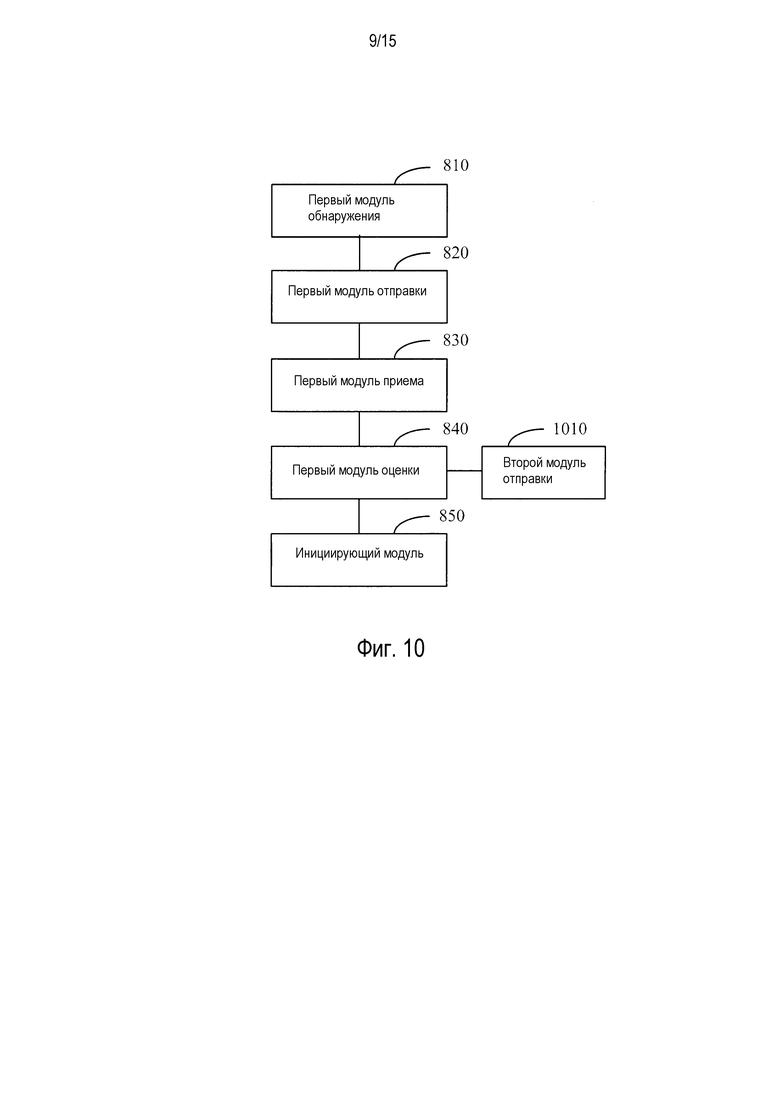
[00190] Фиг. 10 - блок-схема дополнительного устройства управления съемкой в соответствии с примерным вариантом осуществления. Устройство может быть интеллектуальным мобильным терминалом или может применяться к нему, как показано на фиг. 10, на основе варианта осуществления, который показан на фиг. 8; устройство может дополнительно включать в себя второй модуль 1010 отправки.
[00191] Второй модуль 1010 отправки выполнен с возможностью отправки первой команды интеллектуальному носимому устройству, если первый модуль 840 оценки оценивает, что кривая движения является предустановленной кривой движения. Первая команда дает интеллектуальному носимому устройству возможность подсказать оператору, что текущая съемка успешно инициируется.
[00192] Следует пояснить, что на основе варианта осуществления, который показан на фиг. 9, можно получить новый вариант осуществления путем добавления второго модуля отправки, и больше не повторяется в этом документе.
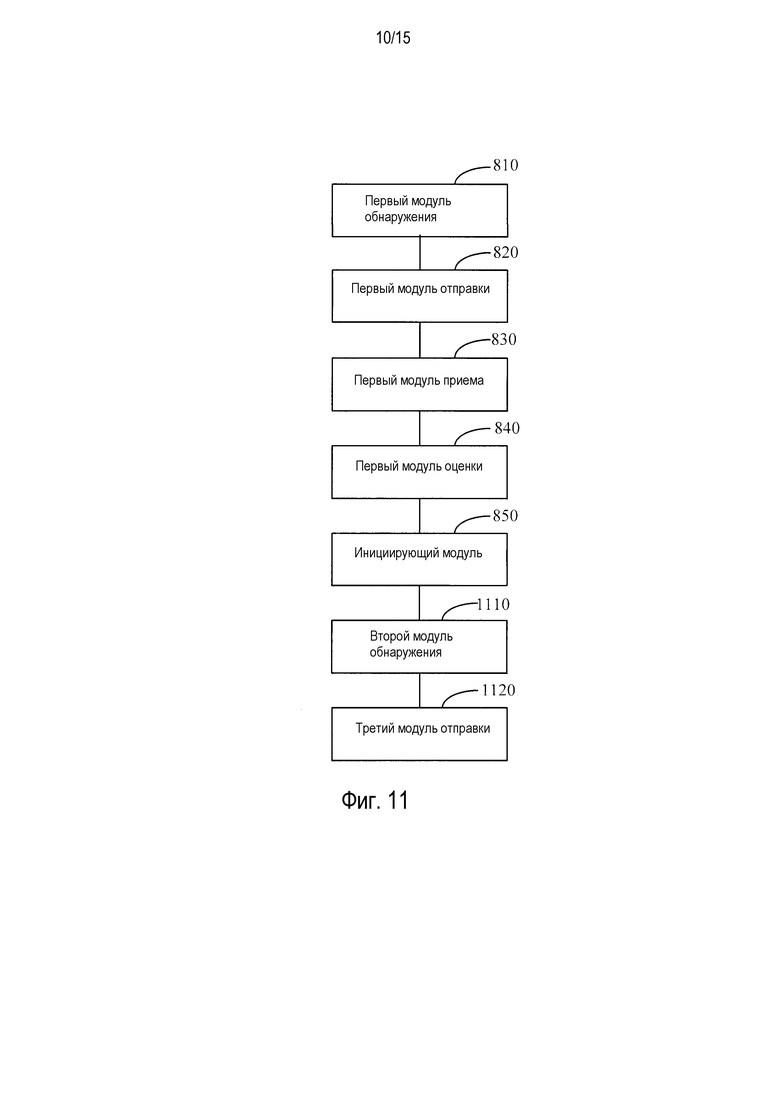
[00193] Фиг. 11 - блок-схема еще одного устройства управления съемкой в соответствии с примерным вариантом осуществления. Устройство может быть интеллектуальным мобильным терминалом или может применяться к нему на основе варианта осуществления, который показан на фиг. 8, при этом устройство может дополнительно включать в себя второй модуль 1110 обнаружения и третий модуль 1120 отправки.
[00194] Второй модуль 1110 обнаружения выполнен с возможностью обнаружения, переключается ли интеллектуальный мобильный терминал из состояния съемки в несъемочное состояние.
[00195] Третий модуль 1120 отправки выполнен с возможностью отправки команды прекращения обнаружения интеллектуальному носимому устройству, когда второй модуль 1110 обнаружения обнаруживает, что интеллектуальный мобильный терминал переключается из состояния съемки в несъемочное состояние. Команда прекращения обнаружения дает интеллектуальному носимому устройству возможность прекратить отправку кривой движения в реальном масштабе времени.
[00196] Следует пояснить, что на основе варианта осуществления, который показан на фиг. 9 или 10, можно получить новый вариант осуществления путем добавления второго модуля 1110 обнаружения и третьего модуля 1120 отправки, и больше не повторяется в этом документе.
[00197] В устройстве управления съемкой, предоставленном в настоящем варианте осуществления, когда интеллектуальный мобильный терминал обнаруживает, что приложение камеры переключается из состояния съемки в несъемочное состояние, интеллектуальный мобильный терминал отправляет команду прекращения обнаружения интеллектуальному носимому устройству, чтобы интеллектуальное носимое устройство прекратило обнаружение действия оператора, посредством этого препятствуя продолжению обнаружения интеллектуальным носимым устройством действия оператора и, соответственно, использованию большого количества ресурсов интеллектуального носимого устройства.
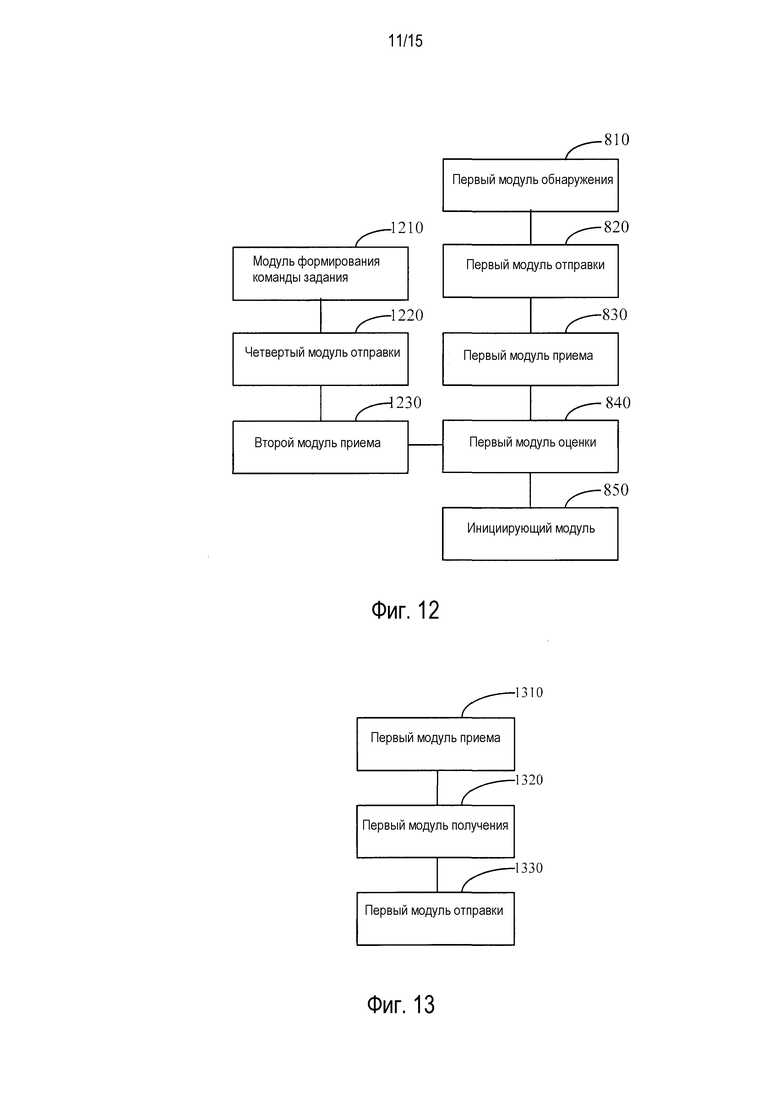
[00198] Фиг. 12 - блок-схема еще одного устройства управления съемкой в соответствии с примерным вариантом осуществления. Устройство может быть интеллектуальным мобильным терминалом или может применяться к нему на основе варианта осуществления, который показан на фиг. 8; устройство может дополнительно включать в себя модуль 1210 формирования команды задания, четвертый модуль 1220 отправки и второй модуль 1230 приема.
[00199] Модуль 1210 формирования команды задания выполнен с возможностью приема такой операции задания оператором предустановленной кривой движения и для формирования команды задания действия в соответствии с этой операцией.
[00200] Четвертый модуль 1220 отправки выполнен с возможностью отправки интеллектуальному носимому устройству команды задания действия, сформированной модулем 1210 формирования команды задания, чтобы интеллектуальное носимое устройство обнаружило кривую собственного движения.
[00201] Второй модуль 1230 приема выполнен с возможностью приема текущей кривой движения, отправленной из интеллектуального носимого устройства, и для задания текущей кривой движения в качестве предустановленной кривой движения.
[00202] Следует пояснить, что на основе варианта осуществления, который показан на фиг. 9, 10 или 11, можно получить новый вариант осуществления путем добавления модуля 1210 формирования команды задания, четвертого модуля 1220 отправки и второго модуля 1230 приема, и больше не повторяется в этом документе.
[00203] Настоящее раскрытие изобретения также предоставляет варианты осуществления устройства управления съемкой, применяемого к интеллектуальному носимому устройству.
[00204] Фиг. 13 - блок-схема устройства управления съемкой в соответствии с примерным вариантом осуществления. Устройство может быть интеллектуальным носимым устройством или может применяться к нему, как показано на фиг. 13, при этом устройство содержит: первый модуль 1310 приема, первый модуль 1320 получения и первый модуль 1330 отправки.
[00205] Первый модуль 1310 приема выполнен с возможностью приема команды получения действия, отправленной из интеллектуального мобильного терминала. Команда получения действия формируется интеллектуальным мобильным терминалом, когда интеллектуальный мобильный терминал обнаруживает себя в состоянии съемки.
[00206] Первый модуль 1320 получения выполнен с возможностью получения кривой собственного движения в соответствии с командой получения действия, принятой первым модулем 1310 приема.
[00207] Первый модуль 1330 отправки выполнен с возможностью отправки интеллектуальному мобильному терминалу кривой движения, полученной первым модулем 1320 получения, чтобы инициировать интеллектуальный мобильный терминал для фотографирования, если интеллектуальный мобильный терминал оценивает, что кривая движения является предустановленной кривой движения.
[00208] Устройство управления съемкой, предоставленное настоящим вариантом осуществления, может инициировать интеллектуальный мобильный терминал для фотографирования посредством интеллектуального носимого устройства. В частности, интеллектуальный мобильный терминал инициирует интеллектуальное носимое устройство для обнаружения действия пользователя, когда терминал обнаруживает себя в состоянии съемки. Интеллектуальное носимое устройство отправляет полученную кривую собственного движения интеллектуальному мобильному терминалу. Потом интеллектуальный мобильный терминал инициирует приложение камеры для фотографирования, если обнаруживает, что кривая движения является предустановленной кривой движения. Из вышеупомянутого можно понять, что устройство управления съемкой может автоматически инициировать интеллектуальный мобильный терминал для фотографирования путем обнаружения действия пользователя с помощью интеллектуального носимого устройства, чтобы интеллектуальный мобильный терминал мог фотографировать с помощью дистанционного управления, без инициирования пользователем кнопки съемки вручную в интеллектуальном мобильном терминале в процессе съемки, простом в действии и удобном для использования.
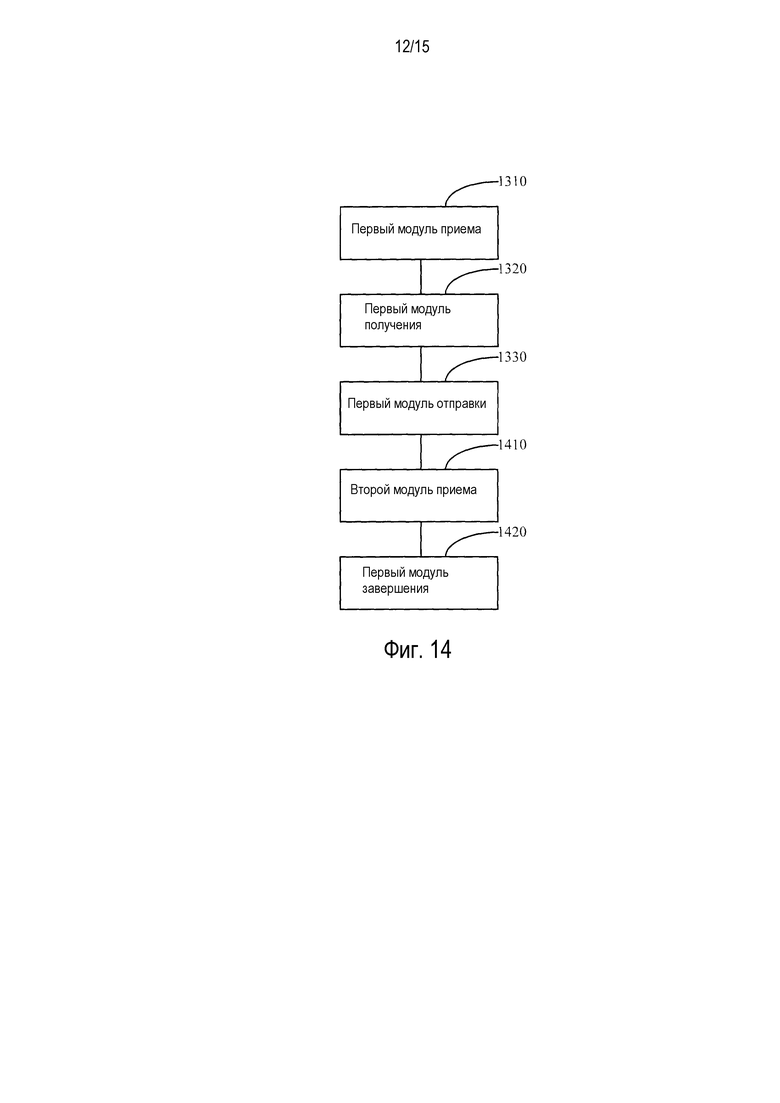
[00209] Фиг. 14 - блок-схема другого устройства управления съемкой в соответствии с примерным вариантом осуществления. Устройство может быть интеллектуальным носимым устройством или может применяться к нему, как показано на фиг. 14, на основе варианта осуществления, который показан на фиг. 13; устройство может дополнительно включать в себя второй модуль 1410 приема и первый модуль 1420 завершения.
[00210] Второй модуль 1410 приема выполнен с возможностью приема команды прекращения обнаружения, отправленной из интеллектуального мобильного терминала.
[00211] Первый модуль 1420 завершения выполнен с возможностью прекращения отправки кривой собственного движения в реальном масштабе времени в соответствии с командой прекращения обнаружения, принятой вторым модулем 1410 приема, где команда прекращения обнаружения формируется интеллектуальным мобильным терминалом, когда интеллектуальный мобильный терминал переключается из состояния съемки в несъемочное состояние при обнаружении.
[00212] В другом примерном варианте осуществления из настоящего раскрытия изобретения на основе варианта осуществления, который показан на фиг. 13, устройство управления съемкой может дополнительно включать в себя второй модуль завершения.
[00213] Второй модуль завершения выполнен с возможностью прекращения отправки кривой собственного движения в реальном масштабе времени, если он терпит неудачу в приеме команды прекращения обнаружения, отправленной из интеллектуального мобильного терминала, в рамках второй предустановленной продолжительности после приема команды получения действия.
[00214] В устройстве управления съемкой, предоставленном в настоящем варианте осуществления, если текущее состояние удовлетворяет условию для прекращения обнаружения, то прекращается обнаружение действия владельца интеллектуального носимого устройства, экономя таким образом ресурсы процессора интеллектуального носимого устройства и электрическую энергию.
[00215] Фиг. 15 - блок-схема дополнительного устройства управления съемкой в соответствии с примерным вариантом осуществления. Устройство может быть интеллектуальным носимым устройством или может применяться к нему на основе варианта осуществления, который показан на фиг. 13, при этом устройство может дополнительно включать в себя третий модуль 1510 приема и модуль 1520 подсказки.
[00216] Третий модуль 1510 приема выполнен с возможностью приема первой команды, отправленной из интеллектуального мобильного терминала. Первая команда формируется интеллектуальным мобильным терминалом, когда интеллектуальный мобильный терминал обнаруживает, что кривая движения является предустановленной кривой движения.
[00217] Модуль 1520 подсказки выполнен с возможностью подсказки оператору, что текущая съемка успешно инициируется на основе первой команды, принятой третьим модулем 1510 приема.
[00218] В устройстве управления съемкой, предоставленном в настоящем варианте осуществления, когда принимается первая команда, отправленная из интеллектуального мобильного терминала, пользователю подсказывают, что фотографирование успешно инициируется, препятствуя, таким образом, продолжению совершения пользователем предустановленного действия, препятствуя продолжению получения интеллектуальным носимым устройством кривой собственного движения и препятствуя продолжению оценивания интеллектуальным мобильным терминалом, является ли принятая кривая движения предустановленной кривой движения. Таким образом, можно дополнительно сэкономить ресурсы процессора интеллектуального носимого устройства и электрическую энергию.
[00219] Фиг. 16 - блок-схема еще одного устройства управления съемкой в соответствии с примерным вариантом осуществления. Устройство может быть интеллектуальным носимым устройством или может применяться к нему на основе варианта осуществления, который показан на фиг. 13, при этом устройство может дополнительно содержать четвертый модуль 1610 приема и модуль 1620 обнаружения.
[00220] Четвертый модуль 1610 приема выполнен с возможностью приема команды задания действия, отправленной из интеллектуального мобильного терминала. Команда задания действия формируется интеллектуальным мобильным терминалом, когда интеллектуальный мобильный терминал обнаруживает операцию задания действия оператором.
[00221] Модуль 1620 обнаружения выполнен с возможностью обнаружения текущей кривой собственного движения в соответствии с командой задания действия и для отправки текущей кривой движения интеллектуальному мобильному терминалу, чтобы интеллектуальный мобильный терминал задал текущую кривую движения в качестве предустановленной кривой движения.
[00222] Фиг. 17 - блок-схема устройства 800, используемого для способа управления съемкой в соответствии с примерным вариантом осуществления. Например, устройство 800 может быть интеллектуальным терминалом, например интеллектуальным мобильным телефоном или планшетным компьютером, описанными выше, мобильным телефоном, компьютером, цифровым широковещательным терминалом, устройством приема/передачи сообщений, планшетным устройством, медицинским устройством, устройством для занятий физкультурой, PDA (персональным цифровым помощником) и т. п. Устройство 800 может быть интеллектуальным носимым устройством, которое описано выше.
[00223] Ссылаясь на фиг. 17, устройство 800 может включать в себя один или несколько компонентов, которые указаны ниже: процессорный компонент 802, запоминающее устройство 804, компонент 806 питания, мультимедийный компонент 808, звуковой компонент 810, интерфейс 812 ввода/вывода (I/O), сенсорный компонент 814 и компонент 816 связи.
[00224] Процессорный компонент 802 обычно управляет общей работой устройства 800, например, отображением, телефонным вызовом, передачей данных, и работой, ассоциированной с операцией камеры и операцией записи. Процессорный компонент 802 может включать в себя один или множество процессоров 820 для исполнения команд, чтобы частично или полностью выполнять этапы вышеприведенного способа. К тому же процессорный компонент 802 может включать в себя один или множество модулей для удобства взаимодействия между процессорным компонентом 802 и другими компонентами. Например, процессорный компонент 802 может включать в себя мультимедийный модуль для удобства взаимодействия между мультимедийным компонентом 808 и процессорным компонентом 802.
[00225] Запоминающее устройство 804 выполнено с возможностью хранения данных разных типов, чтобы поддерживать работу устройства 800. Примеры данных включают в себя любую прикладную программу или подход для работы устройства 800, включая команды, контактные данные, данные телефонной книги, сообщение, изображение и видео, и т.п. Запоминающее устройство 804 можно реализовать с помощью энергозависимого или энергонезависимого запоминающего устройства любого типа или их сочетания, например, статического оперативного запоминающего устройства (SRAM), электрически стираемого программируемого постоянного запоминающего устройства (EEPROM), стираемого программируемого постоянного запоминающего устройства (EPROM), программируемого постоянного запоминающего устройства (PROM), постоянного запоминающего устройства (ROM), магнитного запоминающего устройства, флэш-памяти, магнитного диска или оптического диска.
[00226] Компонент 806 питания подает питание для компонентов устройства 800. Компонент 806 питания может включать в себя систему управления питанием, один или множество источников питания и другие компоненты, ассоциированные с производством, управлением и распределением энергии в устройстве 800.
[00227] Мультимедийный компонент 808 включает в себя экран между устройством 800 и пользователем для предоставления интерфейса вывода. В некоторых вариантах осуществления экран может включать в себя LCD (жидкокристаллический дисплей) и сенсорную панель (TP). Если экран включает в себя сенсорную панель, то экран можно реализовать в виде сенсорного экрана для приема входного сигнала от пользователей. Сенсорная панель включает в себя один или множество тактильных датчиков для распознавания жестов на сенсорной панели, например касание и скольжение, и т.п. Тактильный датчик может не только распознавать границу перемещения у касания или скольжения, но также может обнаруживать длительность и давление, связанные с операцией касания или скольжения. В некоторых вариантах осуществления мультимедийный компонент 808 включает в себя фронтальную камеру и/или тыловую камеру. Когда устройство 800 находится в рабочем режиме, например, режиме захвата или видеорежиме, фронтальная камера и/или тыловая камера может принимать внешние мультимедийные данные. Каждая из фронтальной камеры и тыловой камеры может быть объективом с постоянным фокусным расстоянием либо иметь фокусное расстояние и способность оптического масштабирования.
[00228] Звуковой компонент 810 выполнен с возможностью вывода и/или ввода звукового сигнала. Например, звуковой компонент 810 включает в себя микрофон (MIC); когда устройство 800 находится в рабочем режиме, например режиме вызова, режиме записи и режиме распознавания речи, микрофон выполнен с возможностью приема внешнего звукового сигнала. Принятый звуковой сигнал может дополнительно сохраняться в запоминающем устройстве 804 или отправляться с помощью компонента 816 связи. В некоторых вариантах осуществления звуковой компонент 810 также включает в себя громкоговоритель для вывода звукового сигнала.
[00229] Интерфейс 812 I/O предоставляет интерфейс для процессорного компонента 802 и модулей интерфейса периферийных устройств, причем модули интерфейса периферийных устройств могут быть клавиатурой, сенсорным колесом и кнопками, и т.п. Эти кнопки могут включать в себя, но не только: кнопку возврата, кнопку громкости, кнопку запуска и кнопку блокировки.
[00230] Сенсорный компонент 814 включает в себя один или несколько датчиков для обеспечения устройства 800 оценкой состояния во всех проявлениях. Например, сенсорный компонент 814 может обнаруживать включенное/выключенное состояние устройства 800, относительное положение компонентов, например, компонентами являются дисплей и клавишная панель устройства 800; сенсорный компонент 814 также может обнаруживать изменение положения устройства 800 или его компонента, наличие или отсутствие касания пользователем устройства 800, направление или ускорение/замедление устройства 800 и колебание температуры устройства 800. Сенсорный компонент 814 также может включать в себя детектор приближения, который выполнен с возможностью обнаружения наличия ближайших объектов без физического касания. Сенсорный компонент 814 также может включать в себя оптический датчик, например, датчик изображения на CMOS или CCD для формирования изображений. В некоторых вариантах осуществления сенсорный компонент 814 также может включать в себя датчик ускорения, гироскоп, магнитный датчик, датчик давления или датчик температуры.
[00231] Компонент 816 связи выполнен с возможностью упрощения проводной связи или беспроводной связи между устройством 800 и другим оборудованием. Устройству 800 разрешен доступ к беспроводной сети на основе стандартов связи, например Wi-Fi, 2G или 3G, или их сочетания. В примерном варианте осуществления компонент 816 связи посредством канала вещания принимает вещательный сигнал или связанную с вещанием информацию от внешних систем управления вещанием. В примерном варианте осуществления компонент 816 связи также включает в себя модуль связи малого радиуса действия (NFC) для поддержки связи малой дальности. Например, модуль NFC можно реализовать на основе технологии радиочастотной идентификации (RFID), технологии Ассоциации по передаче данных в инфракрасном диапазоне (IrDA), технологии сверхширокополосной связи (UWB), технологии Bluetooth (BT) и других технологий.
[00232] В примерных вариантах осуществления устройство 800 можно реализовать с помощью одной или множества специализированных интегральных схем (ASIC), цифровых процессоров сигналов (DSP), оборудования цифровой обработки сигналов (DSPD), программируемых логических устройств (PLD), программируемых пользователем вентильных матриц (FPGA), контроллеров, микроконтроллеров, микропроцессоров или других электронных компонентов, выполненных с возможностью исполнения вышеприведенных способов.
[00233] В примерных вариантах осуществления также предоставляется постоянный машиночитаемый носитель информации, включающий в себя команды, например, запоминающее устройство 804, включающее в себя команды, которые могут исполняться процессорами 820 устройства 800, чтобы выполнить вышеприведенные способы. Например, постоянный машиночитаемый носитель информации может быть ROM, оперативным запоминающим устройством (RAM), компакт-диском, магнитной лентой, дискетой и оптическим запоминающим устройством, и т.п.
[00234] Постоянный машиночитаемый носитель информации, причем команды на этом носителе информации исполняются процессором интеллектуального мобильного терминала, чтобы интеллектуальный мобильный терминал мог исполнить способ управления съемкой, и этот способ содержит:
[00235] обнаружение, находится ли интеллектуальный мобильный терминал в состоянии съемки;
[00236] отправку команды получения действия интеллектуальному носимому устройству в случае обнаружения, что интеллектуальный мобильный терминал находится в состоянии съемки, причем команда получения действия конфигурируется для предоставления интеллектуальному носимому устройству возможности получить кривую собственного движения;
[00237] прием кривой движения, полученной интеллектуальным носимым устройством, и оценивание, является ли кривая движения предустановленной кривой движения; и
[00238] инициирование интеллектуального мобильного терминала для фотографирования, если кривая движения является предустановленной кривой движения.
[00239] Настоящее раскрытие изобретения также предоставляет постоянный машиночитаемый носитель информации, применяемый к интеллектуальному носимому устройству, причем команды на этом носителе информации исполняются процессором интеллектуального носимого устройства, чтобы интеллектуальное носимое устройство могло исполнить способ управления съемкой, и этот способ содержит:
[00240] прием команды получения действия, отправленной из интеллектуального терминала, причем команда получения действия формируется интеллектуальным терминалом, когда интеллектуальный терминал обнаруживает себя в состоянии съемки; и
[00241] получение кривой собственного движения в соответствии с командой получения действия и отправку полученной кривой движения интеллектуальному терминалу, чтобы инициировать интеллектуальный терминал для фотографирования, если интеллектуальный терминал оценивает, что кривая движения является предустановленной кривой движения.
[00242] Другие варианты осуществления изобретения станут очевидны специалистам в данной области техники из рассмотрения описания изобретения и применения раскрытого здесь изобретения на практике. Данная заявка предназначена для охвата любых изменений, использований или адаптаций изобретения, придерживающихся его общих принципов и включающих в себя такие отступления от настоящего раскрытия изобретения, которые относятся к известной или принятой практике в данной области техники. Подразумевается, что описание изобретения и примеры должны рассматриваться только как иллюстративные, при этом истинный объем и сущность изобретения указываются нижеследующей формулой изобретения.
[00243] Необходимо принять во внимание, что настоящее изобретение не ограничивается точной конструкцией, которая описана выше и проиллюстрирована на прилагаемых чертежах, и что можно внести различные модификации и изменения без отклонения от объема изобретения. Подразумевается, что объем изобретения должен ограничиваться только прилагаемой формулой изобретения.
Изобретение относится к области управления устройствами посредством обнаружения ориентации устройства, а именно к управлению съемкой и соответствующему устройству. Техническим результатом является обеспечение возможности автоматически инициировать интеллектуальный мобильный терминал для фотографирования путем обнаружения действия пользователя с помощью интеллектуального носимого устройства, чтобы интеллектуальный мобильный терминал мог фотографировать с помощью дистанционного управления, без инициирования пользователями кнопки съемки вручную в интеллектуальном мобильном терминале в процессе съемки. Для этого, когда интеллектуальный мобильный терминал обнаруживает, что он находится в состоянии съемки, он инициирует интеллектуальное носимое устройство для обнаружения действия пользователя. Интеллектуальное носимое устройство отправляет полученную кривую собственного движения интеллектуальному мобильному терминалу. Потом интеллектуальный мобильный терминал инициирует приложение камеры для фотографирования, если обнаруживает, что кривая движения является предустановленной кривой движения. 6 н. и 16 з.п. ф-лы, 17 ил.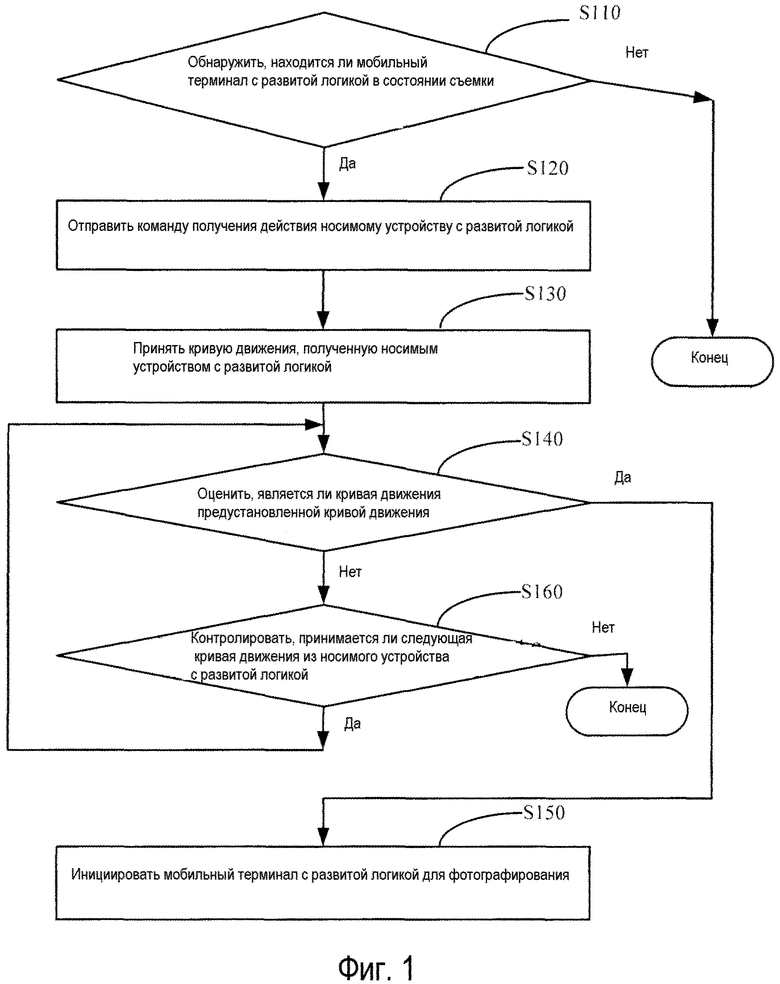
1. Способ управления съемкой для использования в интеллектуальном терминале, содержащий этапы, на которых:
обнаруживают, находится ли интеллектуальный терминал в состоянии съемки;
отправляют команду получения действия интеллектуальному носимому устройству в случае обнаружения, что интеллектуальный терминал находится в состоянии съемки, причем команда получения действия конфигурируется для предоставления интеллектуальному носимому устройству возможности получить кривую собственного движения;
принимают кривую движения, полученную интеллектуальным носимым устройством, и оценивают, является ли кривая движения предустановленной кривой движения; и
инициируют интеллектуальный терминал для фотографирования, если кривая движения является предустановленной кривой движения.
2. Способ по п. 1, причем способ дополнительно содержит этапы, на которых:
контролируют, принимается ли следующая кривая движения, отправленная из интеллектуального носимого устройства, если кривая движения не является предустановленной кривой движения; и
возвращаются к исполнению этапа оценивания, является ли кривая движения предустановленной кривой движения, если принимается следующая кривая движения, отправленная из интеллектуального носимого устройства.
3. Способ по п. 1, причем способ дополнительно содержит этап, на котором:
отправляют первую команду интеллектуальному носимому устройству, если кривая движения является предустановленной кривой движения, причем первая команда конфигурируется для предоставления интеллектуальному носимому устройству возможности подсказать оператору, что текущая съемка успешно инициируется.
4. Способ по п. 1, причем способ дополнительно содержит этап, на котором:
отправляют команду прекращения обнаружения интеллектуальному носимому устройству, когда интеллектуальный терминал переключается из состояния съемки в несъемочное состояние при обнаружении, причем команда прекращения обнаружения конфигурируется для предоставления интеллектуальному носимому устройству возможности прекратить отправку кривой движения в реальном масштабе времени.
5. Способ по п. 1, в котором этап, на котором инициируют интеллектуальный терминал для фотографирования, если кривая движения является предустановленной кривой движения, содержит этапы, на которых:
инициируют интеллектуальный терминал для однократного фотографирования, когда одна кривая движения интеллектуального носимого устройства, принятая в рамках первой предустановленной продолжительности, является предустановленной кривой движения, и инициируют интеллектуальный терминал для непрерывного фотографирования, когда каждая из по меньшей мере двух кривых движения интеллектуального носимого устройства, принятых в рамках первой предустановленной продолжительности, является предустановленной кривой движения;
или
если предустановленная кривая движения содержит первую предустановленную кривую движения и вторую предустановленную кривую движения, инициируют интеллектуальный терминал для однократного фотографирования, если кривая движения является первой предустановленной кривой движения, и инициируют интеллектуальный терминал для непрерывного фотографирования, если кривая движения является второй предустановленной кривой движения.
6. Способ по п. 1, причем способ дополнительно содержит этапы, на которых:
принимают операцию задания предустановленной кривой движения от оператора и формируют команду задания действия в соответствии с этой операцией;
отправляют команду задания действия интеллектуальному носимому устройству, чтобы интеллектуальное носимое устройство получило текущую кривую собственного движения; и
принимают текущую кривую движения, полученную интеллектуальным носимым устройством, и задают текущую кривую движения в качестве предустановленной кривой движения, причем предустановленная кривая движения конфигурируется для инициирования интеллектуального терминала для фотографирования.
7. Способ управления съемкой для использования в интеллектуальном носимом устройстве, содержащий этапы, на которых:
принимают команду получения действия, отправленную из интеллектуального терминала, причем команда получения действия формируется, когда интеллектуальный терминал обнаруживает себя в состоянии съемки; и
получают кривую движения самого интеллектуального носимого устройства в соответствии с командой получения действия и отправляют полученную кривую движения интеллектуальному терминалу, чтобы инициировать интеллектуальный терминал для фотографирования, если интеллектуальный терминал оценивает, что кривая движения является предустановленной кривой движения.
8. Способ по п. 7, причем способ дополнительно содержит этапы, на которых:
принимают команду прекращения обнаружения, отправленную из интеллектуального терминала, и прекращают отправку кривой движения самого интеллектуального носимого устройства в реальном масштабе времени в соответствии с командой прекращения обнаружения, причем команда прекращения обнаружения формируется интеллектуальным терминалом, когда интеллектуальный терминал обнаруживает себя переключенным из состояния съемки в несъемочное состояние;
или
прекращают отправку кривой движения самого интеллектуального носимого устройства в реальном масштабе времени, если команда прекращения обнаружения, отправленная из интеллектуального терминала, не принимается в рамках второй предустановленной продолжительности после приема команды получения действия.
9. Способ по п. 7, причем способ дополнительно содержит этап, на котором:
принимают первую команду, отправленную из интеллектуального терминала, и подсказывают оператору, что текущая съемка успешно инициируется на основе первой команды, причем первая команда формируется, когда интеллектуальный терминал обнаруживает, что кривая движения является предустановленной кривой движения.
10. Способ по п. 7, причем способ дополнительно содержит этапы, на которых:
принимают команду задания действия, отправленную из интеллектуального терминала, причем команда задания действия формируется интеллектуальным терминалом, когда интеллектуальный терминал обнаруживает операцию задания действия оператором; и
обнаруживают текущую кривую движения самого интеллектуального носимого устройства в соответствии с командой задания действия и отправляют текущую кривую движения интеллектуальному терминалу, чтобы интеллектуальный терминал задал текущую кривую движения в качестве предустановленной кривой движения.
11. Устройство управления съемкой, содержащее:
первый модуль обнаружения, выполненный с возможностью обнаружения, находится ли интеллектуальный терминал в состоянии съемки;
первый модуль отправки, выполненный с возможностью отправки команды получения действия интеллектуальному носимому устройству, если интеллектуальный терминал находится в состоянии съемки, причем команда получения действия конфигурируется для предоставления интеллектуальному носимому устройству возможности получить кривую собственного движения;
первый модуль приема, выполненный с возможностью приема кривой движения, полученной интеллектуальным носимым устройством;
первый модуль оценки, выполненный с возможностью оценивания, является ли кривая движения предустановленной кривой движения; и
инициирующий модуль, выполненный с возможностью инициирования интеллектуального терминала для фотографирования, если кривая движения является предустановленной кривой движения.
12. Устройство по п. 11, причем устройство дополнительно содержит:
второй модуль оценки, выполненный с возможностью контроля, принимается ли следующая кривая движения, отправленная из интеллектуального носимого устройства, если кривая движения не является предустановленной кривой движения, и предоставления первому модулю оценки возможности оценить, является ли следующая кривая движения предустановленной кривой движения, если принимается следующая кривая движения, отправленная из интеллектуального носимого устройства.
13. Устройство по п. 11, причем устройство дополнительно содержит:
второй модуль отправки, выполненный с возможностью отправки первой команды интеллектуальному носимому устройству, если кривая движения является предустановленной кривой движения, причем первая команда конфигурируется для предоставления интеллектуальному носимому устройству возможности подсказать оператору, что текущая съемка успешно инициируется.
14. Устройство по п. 11, причем устройство дополнительно содержит:
второй модуль обнаружения, выполненный с возможностью обнаружения, переключается ли интеллектуальный терминал из состояния съемки в несъемочное состояние; и
третий модуль отправки, выполненный с возможностью отправки команды прекращения обнаружения интеллектуальному носимому устройству, когда интеллектуальный терминал переключается из состояния съемки в несъемочное состояние при обнаружении, причем команда прекращения обнаружения конфигурируется для предоставления интеллектуальному носимому устройству возможности прекратить отправку кривой движения в реальном масштабе времени.
15. Устройство по п. 11, в котором:
инициирующий модуль содержит:
первый инициирующий подмодуль, выполненный с возможностью инициирования интеллектуального терминала для однократного фотографирования, если одна кривая движения интеллектуального носимого устройства, принятая в рамках первой предустановленной продолжительности, является предустановленной кривой движения, и
второй инициирующий подмодуль, выполненный с возможностью инициирования интеллектуального терминала для непрерывного фотографирования, когда каждая из по меньшей мере двух кривых движения интеллектуального носимого устройства, принятых в рамках первой предустановленной продолжительности, является предустановленной кривой движения; или
если предустановленная кривая движения содержит первую предустановленную кривую движения и вторую предустановленную кривую движения, то инициирующий модуль содержит:
третий инициирующий подмодуль, выполненный с возможностью инициирования интеллектуального терминала для однократного фотографирования, когда кривая движения является первой предустановленной кривой движения, и
четвертый инициирующий подмодуль, выполненный с возможностью инициирования интеллектуального терминала для непрерывного фотографирования, когда кривая движения является второй предустановленной кривой движения.
16. Устройство по п. 11, причем устройство дополнительно содержит:
модуль формирования команды задания, выполненный с возможностью приема операции задания предустановленной кривой движения от оператора и для формирования команды задания действия в соответствии с этой операцией;
четвертый модуль отправки, выполненный с возможностью отправки команды задания действия интеллектуальному носимому устройству, чтобы интеллектуальное носимое устройство обнаружило текущую кривую собственного движения; и
второй модуль приема, выполненный с возможностью приема текущей кривой движения, отправленной из интеллектуального носимого устройства, и для задания текущей кривой движения в качестве предустановленной кривой движения.
17. Устройство управления съемкой для использования в интеллектуальном носимом устройстве, содержащее:
первый модуль приема, выполненный с возможностью приема команды получения действия, отправленной из интеллектуального терминала, причем команда получения действия формируется интеллектуальным терминалом, когда интеллектуальный терминал обнаруживает себя в состоянии съемки;
первый модуль получения, выполненный с возможностью получения кривой движения самого интеллектуального носимого устройства в соответствии с командой получения действия; и
первый модуль отправки, выполненный с возможностью отправки кривой движения интеллектуальному терминалу, чтобы инициировать интеллектуальный терминал для фотографирования, если интеллектуальный терминал оценивает, что кривая движения является предустановленной кривой движения.
18. Устройство по п. 17, причем устройство дополнительно содержит:
второй модуль приема, выполненный с возможностью приема команды прекращения обнаружения, отправленной из интеллектуального терминала;
первый модуль завершения, выполненный с возможностью прекращения отправки кривой движения самого интеллектуального носимого устройства в реальном масштабе времени в соответствии с командой прекращения обнаружения, причем команда прекращения обнаружения формируется интеллектуальным терминалом, когда интеллектуальный терминал обнаруживает себя переключенным из состояния съемки в несъемочное состояние;
или
второй модуль завершения, выполненный с возможностью прекращения отправки кривой движения самого интеллектуального носимого устройства в реальном масштабе времени, если команда прекращения обнаружения, отправленная из интеллектуального терминала, не принимается в рамках второй предустановленной продолжительности после приема команды получения действия.
19. Устройство по п. 17, причем устройство дополнительно содержит:
третий модуль приема, выполненный с возможностью приема первой команды, отправленной из интеллектуального терминала, причем первая команда формируется интеллектуальным терминалом,
когда интеллектуальный терминал обнаруживает, что кривая движения является предустановленной кривой движения; и
модуль подсказки, выполненный с возможностью подсказки оператору, что текущая съемка успешно инициируется на основе первой команды.
20. Устройство по п. 17, причем устройство дополнительно содержит:
четвертый модуль приема, выполненный с возможностью приема команды задания действия, отправленной из интеллектуального терминала, причем команда задания действия формируется интеллектуальным терминалом, когда интеллектуальный терминал обнаруживает операцию задания действия оператором; и
второй модуль обнаружения, выполненный с возможностью обнаружения текущей кривой движения самого интеллектуального носимого устройства в соответствии с командой задания действия и для отправки текущей кривой движения интеллектуальному терминалу, чтобы интеллектуальный терминал задал текущую кривую движения в качестве предустановленной кривой движения.
21. Интеллектуальный мобильный терминал, содержащий:
процессор; и
запоминающее устройство, выполненное с возможностью хранения команд, исполняемых процессором;
причем процессор выполнен с возможностью выполнения:
обнаружения, находится ли интеллектуальный мобильный терминал в состоянии съемки;
отправки команды получения действия интеллектуальному носимому устройству в случае обнаружения, что интеллектуальный мобильный терминал находится в состоянии съемки, причем команда получения действия конфигурируется для предоставления интеллектуальному носимому устройству возможности получить кривую собственного движения;
приема кривой движения, полученной интеллектуальным носимым устройством, и оценки, является ли кривая движения предустановленной кривой движения; и
инициирования интеллектуального мобильного терминала для фотографирования, если кривая движения является предустановленной кривой движения.
22. Интеллектуальное носимое устройство, содержащее:
процессор; и
запоминающее устройство, выполненное с возможностью хранения команд, исполняемых процессором;
причем процессор выполнен с возможностью выполнения:
приема команды получения действия, отправленной из интеллектуального терминала, причем команда получения действия формируется, когда интеллектуальный терминал обнаруживает себя в состоянии съемки; и
получения кривой движения самого интеллектуального носимого устройства в соответствии с командой получения действия и отправки полученной кривой движения интеллектуальному терминалу, чтобы инициировать интеллектуальный терминал для фотографирования, если интеллектуальный терминал оценивает, что кривая движения является предустановленной кривой движения.
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| CN 104065882 A, 24.09.2014 | |||
| УСТРОЙСТВО ЗАХВАТА ИЗОБРАЖЕНИЯ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2012 |
|
RU2518987C2 |
| СПОСОБ РАБОТЫ ПОЛЬЗОВАТЕЛЬСКОГО ИНТЕРФЕЙСА ПОРТАТИВНОГО УСТРОЙСТВА ОБРАБОТКИ ДАННЫХ | 2000 |
|
RU2242043C2 |
| CN 101930282 A, 29.12.2010 | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |

