[Область техники, к которой относится изобретение]
[1] Настоящее изобретение относится к системе беспроводной связи. Более конкретно, настоящее изобретение относится к способу приема информации о синхронизации для прямой связи между терминалами в системе беспроводной связи и устройству для него.
[Уровень техники]
[2] В качестве примера системы мобильной связи, в которой применимо настоящее изобретение, кратко описывается система связи LTE (долгосрочная эволюция) Проекта партнерства по созданию системы 3-го поколения (3GPP).
[3] Фиг. 1 представляет собой схематический чертеж, изображающий сетевую структуру усовершенствованной универсальной системы мобильной связи (E-UMTS) в качестве примера системы беспроводной связи. E-UMTS представляет собой усовершенствованный вид UMTS и был стандартизован в 3GPP. Как правило, E-UMTS может называться системой долгосрочной эволюции (LTE). В отношении подробностей технических спецификаций универсальной системы мобильной связи (UMTS) и E-UMTS ссылка делается на версию 7 и версию 8 «3rd Generation Partnership Project; Technical Specification Group Radio Access Network».
[4] Как показано на фиг. 1, E-UMTS включает в себя, главным образом, пользовательское оборудование (UE), базовые станции (или усовершенствованные узлы B (eNB) или (eNode B)) и шлюз доступа (AG), который располагается в конце сети (усовершенствованной сети универсального наземного радиодоступа (E-UTRAN)) и который подсоединяется к внешней сети. Обычно, eNB может одновременно передавать многочисленные потоки данных для широковещательной услуги, многоадресной услуги и/или одноадресной услуги.
[5] На каждый eNB может быть одна или несколько сот. Сота устанавливается на использование полосы частот, такой как 1,25, 2,5, 5, 10, 15 или 20 МГц для обеспечения службы передачи по нисходящей линии связи или по восходящей линии связи на несколько UE. Разные соты могут устанавливаться на обеспечение разных полос частот. eNB управляет передачей или приемом данных множества UE. eNB передает информацию планирования нисходящей линии связи (DL) для данных DL, чтобы информировать соответствующее UE о временной/частотной области, в которой передаются данные, кодировании, размере данных и информации, относящейся к гибридному автоматическому запросу на повторение (HARQ). Кроме того, eNB передает информацию планирования восходящей линии связи (UL) для данных UL на соответствующее UE, чтобы информировать UE о временной/частотной области, которая может использоваться посредством UE, кодировании, размере данных и информации, относящейся к HARQ. Между eNB может использоваться интерфейс для передачи пользовательского трафика или трафика управления. Базовая сеть (CN) может включать в себя AG и сетевой узел или т.п. для регистрации пользователя UE. AG управляет мобильностью UE на основе зоны слежения (TA). Одна TA включает в себя множество сот.
[6] Хотя технология беспроводной связи была разработана до LTE (долгосрочной эволюции) на основе широкополосного множественного доступа с кодовым разделением каналов (WCDMA), продолжают повышаться требования и ожидания пользователей и провайдеров. Кроме того, так как другие технологии беспроводного доступа непрерывно совершенствуются, требуется новое развитие технологии, чтобы обеспечить высокую конкурентоспособность в будущем. Требуется уменьшение стоимости на бит, повышение доступности услуг, гибкое использование полосы частот, простая конструкция, открытый интерфейс, подходящее потребление мощности пользовательским оборудованием (UE) и т.п.
[Раскрытие изобретения]
[Техническая задача]
[7] Принимая во внимание вышеописанное, задачей настоящего изобретения является обеспечение способа приема информации о синхронизации для прямой связи между терминалами в системе беспроводной связи и устройства для него.
[Техническое решение]
[8] Задача настоящего изобретения может достигаться обеспечением способа приема первым терминалом информации о синхронизации для прямой связи между терминалами в системе беспроводной связи, включающего в себя прием информации об опорной соте от обслуживающей соты, прием опорного сигнала синхронизации от опорной соты и получение синхронизации для прямой связи на основе опорного сигнала синхронизации, в котором опорная сота включает в себя по меньшей мере одну из сот, включенных в кластер сот, в котором кластер сот включает в себя по меньшей мере одну из множества соседних сот, являющихся соседними для опорной соты, и обслуживающую соту. Предпочтительно, что способ дополнительно включает в себя передачу или прием сигнала на или от аналогичного терминала на основании полученной синхронизации, используя прямую связь.
Предпочтительно, что опорная сота включает в себя множество сот. Следовательно, способ может дополнительно включать в себя деление ресурсов для прямой связи на множество разделов, в котором синхронизация для первого раздела ресурсов из множества разделов получается от первой опорной соты опорной соты, в котором синхронизация для второго раздела ресурсов из множества разделов получается от второй опорной соты опорной соты. Альтернативно, способ может дополнительно включать в себя прием информации о параметре от обслуживающей соты, в котором, когда сигнал, содержащий первый параметр передается или принимается на или от аналогичного терминала, используя прямую связь, сигнал передается или принимается с использованием синхронизации, полученной от первой опорной соты, функционально связанной с первым параметром, в котором, когда сигнал, содержащий второй параметр, передается или принимается на или от аналогичного терминала с использованием прямой связи, сигнал передается или принимается с использованием синхронизации, полученной от второй опорной соты, функционально связанной со вторым параметром.
[9] Предпочтительно, что информация об опорной соте включает в себя по меньшей мере одно из идентификатора (ID) соты опорной соты и списка сот, включенных в кластер сот. В данном случае, прием опорного сигнала синхронизации от опорной соты выполняется тогда, когда обслуживающая сота включена в список сот.
[10] Кроме того, способ может дополнительно включать в себя прием от обслуживающей соты информации об области ресурсов, причем опорный сигнал синхронизации передается в области ресурсов, в котором мощность передачи по меньшей мере одной из соседних сот уменьшается в области ресурсов.
[11] Способ может дополнительно включать в себя предоставление отчета о результате полученной синхронизации обслуживающей соте.
[12] Согласно другому аспекту настоящего изобретения в нем обеспечивается терминал в системе беспроводной связи, включающий в себя приемопередающий модуль, выполненный с возможностью приема информации об опорной соте от обслуживающей соты и приема опорного сигнала синхронизации от опорной соты, и процессор, выполненный с возможностью получения синхронизации для прямой связи между терминалами на основе опорного сигнала синхронизации, в котором опорная сота включает в себя по меньшей мере одну из сот, включенных в кластер сот, в котором кластер сот включает в себя по меньшей мере одну из множества соседних сот, являющихся соседними для опорной соты, и обслуживающую соту.
[13] Предпочтительно, что опорная сота включает в себя множество сот. Следовательно, процессор может быть выполнен с возможностью деления ресурсов для прямой связи на множество разделов, в котором синхронизация для первого раздела ресурсов из множества разделов получается от первой опорной соты опорной соты, в котором синхронизация для второго раздела ресурсов из множества разделов получается от второй опорной соты опорной соты. Альтернативно, процессор может быть выполнен с возможностью приема информации о параметре от обслуживающей соты, в котором, когда сигнал, содержащий первый параметр, передается или принимается на или от аналогичного терминала, используя прямую связь, сигнал передается или принимается с использованием синхронизации, полученной от первой опорной соты, функционально связанной с первым параметром, в котором, когда сигнал, содержащий второй параметр, передается или принимается на или от аналогичного терминала с использованием прямой связи, сигнал передается или принимается с использованием синхронизации, полученной от второй опорной соты, функционально связанной со вторым параметром.
[14] Предпочтительно, что информация об опорной соте включает в себя по меньшей мере одно из идентификатора (ID) соты опорной соты и списка сот, включенных в кластер сот. Следовательно, приемопередающий модуль может принимать опорный сигнал синхронизации от опорной соты, когда обслуживающая сота включена в список сот.
[15] Аспекты настоящего изобретения могут включать в себя следующие подробности в совокупности.
[16] Первый раздел ресурсов может быть функционально связан с идентификатором (ID) соты первой опорной соты, в котором второй раздел ресурсов может быть функционально связан с ID соты второй опорной соты.
Параметр может включать в себя по меньшей мере одно из последовательности преамбулы и последовательности опорного сигнала демодуляции.
[17] Опорный сигнал синхронизации может включать в себя по меньшей мере одного из первичного сигнала синхронизации, вторичного сигнала синхронизации, характерного для соты опорного сигнала (CRS), опорного сигнала (RS) слежения и опорного сигнала с информацией о состоянии канала (CSI-RS).
[18] Вышеприведенное общее описание и последующее подробное описание настоящего изобретения приведены в качестве примера для дополнения изложения в формуле изобретения.
[Положительные эффекты]
[19] Согласно варианту осуществления настоящего изобретения, когда выполняется прямая связь между UE, может выполняться получение синхронизации между UE, подключенными к разным базовым станциям.
[20] Ресурсы могут эффективно использоваться посредством полученной разной синхронизации между UE, подключенными к разным базовым станциям.
[21] Для специалиста в данной области техники понятно, что эффекты, которые могут быть достигнуты настоящим изобретением, не ограничиваются теми, которые были описаны выше, и другие преимущества настоящего изобретения станут ясны из последующего подробного описания, рассматриваемого совместно с прилагаемыми чертежами.
[Описание чертежей]
[22] Прилагаемые чертежи, которые включены для того, чтобы обеспечить дополнительное понимание изобретения, иллюстрируют варианты осуществления изобретения и вместе с описанием служат для объяснения принципа изобретения. На чертежах:
[23] фиг. 1 представляет схематический чертеж, иллюстрирующий структуру системы беспроводной связи;
[24] фиг. 2 иллюстрирует структуру радиокадра в LTE 3GPP;
[25] фиг. 3 представляет собой чертеж, иллюстрирующий ресурсную сетку слота нисходящей линии связи;
[26] фиг. 4 представляет собой чертеж, иллюстрирующий структуру подкадра нисходящей линии связи;
[27] фиг. 5 представляет собой чертеж, иллюстрирующий структуру подкадра восходящей линии связи;
[28] фиг. 6 иллюстрирует конфигурацию системы беспроводной связи, имеющей многочисленные антенны (технология с многими входами и многими выходами (MIMO));
[29] фиг. 7 иллюстрирует опорный сигнал нисходящей линии связи;
[30] фиг. 8 представляет собой чертеж, иллюстрирующий общий шаблон CRS, применяемый тогда, когда в системе LTE определены четыре передающих антенных порта;
[31] фиг. 9 представляет собой чертеж, иллюстрирующий пример периодической передачи опорного сигнала с информацией о состоянии канала (CSI-RS);
[32] фиг. 10 представляет собой чертеж, иллюстрирующий пример апериодической передачи опорного сигнала с информацией о состоянии канала (CSI-RS);
[33] фиг. 11 представляет собой схему концептуального представления, иллюстрирующую прямую связь между UE;
[34] фиг. 12 представляет собой чертеж, иллюстрирующий способ приема информации о синхронизации для прямой связи между UE, когда UE подключены к разным eNB, согласно варианту осуществления настоящего изобретения;
[35] фиг. 13 иллюстрирует ресурсы во временной области в случае, когда представительная сота идентична обслуживающей соте;
[36] фиг. 14 иллюстрирует ресурсы во временной области в случае, когда представительная сота отлична от обслуживающей соты;
[37] фиг. 15 иллюстрирует ресурсы во временной области в случае, когда существует большая ошибка между представительной сотой и обслуживающей сотой;
[38] фиг. 16 представляет собой чертеж, иллюстрирующий работу соседней соты, управляющей мощностью передачи по конкретному ресурсу для выполнения синхронизации;
[39] фиг. 17 представляет собой чертеж, иллюстрирующий способ приема информации о синхронизации для прямой связи между UE, согласно одному варианту осуществления настоящего изобретения;
[40] фиг. 18 представляет собой чертеж, иллюстрирующий способ приема информации о синхронизации для прямой связи между UE, согласно другому варианту осуществления настоящего изобретения;
[41] фиг. 19 представляет собой чертеж, иллюстрирующий способ приема информации о синхронизации для прямой связи между UE, когда существуют многочисленные опорные соты синхронизации, согласно одному варианту осуществления настоящего изобретения; и
[42] фиг. 20 представляет собой блок-схему, иллюстрирующую конфигурации устройств связи согласно одному варианту осуществления настоящего изобретения.
[Наилучший вариант осуществления изобретения]
[43] Нижеследующие варианты осуществления предлагаются посредством объединения составляющих компонентов и характеристик настоящего изобретения в соответствии с предварительно определенным форматом. Индивидуальные составляющие компоненты или характеристики должны рассматриваться как необязательные факторы при условии, что нет дополнительного замечания. Если требуется, индивидуальные составляющие компоненты или характеристики могут не объединяться с другими компонентами или характеристиками. Также, некоторые составляющие компоненты и/или характеристики могут объединяться для реализации вариантов осуществления настоящего изобретения. Порядок операций, описываемых в вариантах осуществления настоящего изобретения, может меняться на другой. Некоторые компоненты или характеристики любого варианта осуществления также могут быть включены в другие варианты осуществления, или могут быть заменены другими из других вариантов осуществления по мере необходимости.
[44] Варианты осуществления настоящего изобретения описываются на основе взаимосвязи передачи данных между базовой станцией (BS) и терминалом. В данном случае, BS используется в качестве терминального узла сети, посредством которой BS может непосредственно выполнять связь с терминалом. Конкретные операции, подлежащие выполнению посредством BS в настоящем изобретении, также могут выполняться узлом более верхнего уровня BS по мере необходимости.
[45] Другими словами, для специалиста в данной области техники очевидно, что различные операции, позволяющие BS выполнять связь с терминалом в сети, состоящей из нескольких сетевых узлов, включая BS, выполняются посредством BS или других сетевых узлов, кроме BS. Термин «BS» может быть заменен стационарной станцией, узлом B, усовершенствованным узлом B (eNB или eNode B) или точкой доступа (AP) по мере необходимости. Термин «ретранслятор» может быть заменен ретрансляционным узлом (RN) или ретрансляционной станцией (RS). Термин «терминал» также может быть заменен пользовательским оборудованием (UE), мобильной станцией (MS), мобильной абонентской станцией (MSS) или абонентской станцией (SS) по мере необходимости.
[46] Следует отметить, что конкретные термины, описанные в настоящем изобретении, предлагаются для удобства описания и лучшего понимания настоящего изобретения, и использование этих конкретных терминов может быть изменено на другой формат в пределах технического объема или сущности настоящего изобретения.
[47] В некоторых случаях, общеизвестные конструкции и устройства опускаются, чтобы не затруднять понимание принципов настоящего изобретения, и важные функции конструкций и устройств показаны в виде блок-схемы. Одинаковые ссылочные позиции используются на всех чертежах для ссылки на одинаковые или подобные элементы.
[48] Варианты осуществления настоящего изобретения поддерживаются документами стандартов, описанными для по меньшей мере одной из систем беспроводного доступа, включающих в себя систему 802 Института инженеров по электротехнике и радиоэлектронике (IEEE), систему Проекта партнерства по созданию системы 3-го поколения (3GPP), систему LTE (долгосрочная эволюция) 3GPP и систему 3GPP2. В частности, этапы или элементы, которые не описаны, чтобы ясно раскрывать техническую идею настоящего изобретения, в вариантах осуществления настоящего изобретения могут поддерживаться вышеупомянутыми документами. Вся терминология, используемая в данном документе, может поддерживаться по меньшей мере одним из вышеупомянутых документов.
[49] Нижеследующие варианты осуществления настоящего изобретения могут быть применены в многочисленных технологиях беспроводного доступа, например, множественный доступ с кодовым разделением каналов (CDMA), множественный доступ с частотным разделением каналов (FDMA), множественный доступ с временным разделением каналов (TDMA), множественный доступ с ортогональным частотным разделением каналов (OFDMA), множественный доступ с частотным разделением каналов на одной несущей (SC-FDMA) и т.п. CDMA может быть воплощен посредством беспроводной (или радио-) технологии, такой как универсальный наземный радиодоступ (UTRA) или CDMA2000. TDMA может быть воплощен посредством беспроводной (или радио-) технологии, такой как глобальная система мобильной связи (GSM)/пакетная радиосвязь общего назначения (GPRS)/усовершенствованная передача данных для эволюции GSM (EDGE). OFDMA может быть воплощена посредством беспроводной (или радио-) технологии, такой как IEEE (Институт инженеров по электротехнике и радиоэлектронике) 802.11 (Wi-Fi), IEEE 802.16 (WiMAX), IEEE 802-20 и усовершенствованный UTRA (E-UTRA). UTRA является частью универсальной системы мобильной связи (UMTS). LTE (долгосрочная эволюция) Проекта партнерства по созданию системы 3-го поколения (3GPP) представляет собой часть усовершенствованной UMTS (E-UMTS), которая использует E-UTRA. LTE 3GPP применяет OFDMA на нисходящей линии связи и применяет SC-FDMA на восходящей линии связи. Усовершенствованная LTE (LTE-A) представляет собой эволюцию LTE 3GPP. WiMAX может разъясняться стандартом IEEE 802.16e (опорная система беспроводной городской сети (MAN) - OFDMA) и усовершенствованной IEEE 802.16m (усовершенствованная система беспроводной MAN-OFDMA). Для ясности последующее описание сконцентрировано на системах LTE и LTE-A 3GPP. Однако технические признаки настоящего изобретения не ограничиваются ими.
[50] Структура радиокадра системы LTE 3GPP описывается с ссылкой на фиг. 2.
[51] В сотовой системе пакетной радиосвязи мультиплексирования с ортогональным частотным разделением каналов (OFDM) пакеты данных восходящей линии связи/нисходящей линии связи передаются в подкадрах. Один подкадр определяется как предварительно определенный временной интервал, включающий в себя множество OFDM-символов. Стандарт LTE 3GPP поддерживает структуру радиокадра типа 1, применимую к дуплексу с частотным разделением (FDD), и структуру радиокадра типа 2, применимую к дуплексу с временным разделением (TDD).
[52] Фиг. 2(a) представляет собой чертеж, иллюстрирующий структуру радиокадра типа 1. Радиокадр включает в себя 10 подкадров, и один подкадр включает в себя два слота во временной области. Время, требуемое для передачи одного подкадра, определяется как интервал времени передачи (TTI). Например, один подкадр может иметь длительность 1 мс, и один слот может иметь длительность 0,5 мс. Один слот может включать в себя множество OFDM-символов во временной области и может включать в себя множество ресурсных блоков (RB) в частотной области. Так как система LTE 3GPP использует OFDMA на нисходящей линии связи, OFDM-символ указывает длительность одного символа. OFDM-символ может называться SC-FDMA-символом или длительностью символа. RB представляет собой единицу распределения ресурсов, включающую в себя множество соседних поднесущих в одном слоте.
[53] Количество OFDM-символов, включенных в один слот, может меняться в соответствии с конфигурацией циклического префикса (CP). Существует расширенный CP и нормальный CP. Например, количество OFDM-символов, включенных в один слот, может быть равно семи в случае нормального CP. В случае расширенного CP длительность одного OFDM-символа увеличивается, и, таким образом, количество OFDM-символов, включенных в один слот, меньше количества символов в случае нормального CP. В случае расширенного CP, например, количество OFDM-символов, включенных в один слот, может быть равно шести. Если состояние канала является неустойчивым, как в случае, когда UE быстро перемещается, расширенный CP может использоваться для того, чтобы дополнительно уменьшить помехи между символами.
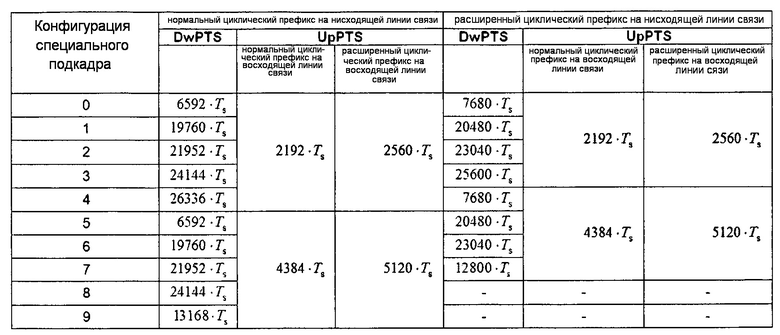
[54] Радиокадр типа 2 на фиг. 2(b) включает в себя два полукадра, причем каждый имеет 5 подкадров, временной слот пилотного сигнала нисходящей линии связи (DwPTS), защитный интервал (GP) и временной слот пилотного сигнала восходящей линии связи (UpPTS). Каждый подкадр делится на два слота. DwPTS используется поиска первоначальной соты, синхронизации или оценки канала на UE. UpPTS используется для оценки канала и получения синхронизации передачи по восходящей линии связи UE на eNB. GP представляет собой интервал между восходящей линией связи и нисходящей линией связи, который устраняет помехи восходящей линии связи, вызываемые задержкой при многолучевом распространении сигнала нисходящей линии связи. Один подкадр включает в себя два слота независимо от типа радиокадра.
[55] В системе TDD LTE определены конфигурации подкадра восходящей линии связи/нисходящей линии связи (конфигурации UL/DL), показанные в таблице 1 ниже.
[56] Таблица 1
[57] В таблице 1 D обозначает подкадр нисходящей линии связи, U обозначает подкадр восходящей линии связи, и S обозначает специальный подкадр. Таблица 1 также изображает периодичность точки переключения между нисходящей линией связи и восходящей линией связи в конфигурации подкадра восходящей линии связи/нисходящей линии связи каждой системы.
[58] Поддерживаемые подкадры восходящей линии связи/нисходящей линии связи показаны в таблице 1. Для подкадров радиокадра «D» обозначает подкадр, зарезервированный для передачи нисходящей линии связи, «U» обозначает подкадр, зарезервированный для передачи восходящей линии связи, «S» обозначает специальный подкадр, включающий в себя временной слот пилотного сигнала нисходящей линии связи (DwPTS), защитный интервал (GP) и слот пилотного сигнала восходящей линии связи (UpPTS).
[59] Документ текущего стандарта 3GPP определяет конфигурацию специального подкадра, показанную в таблице 2 ниже. Таблица 2 изображает DwPTS и UpPTS, установленные при TS=1/(15000*2048), и другая область конфигурируется как GP.
[60] Таблица 2
[61] Изображенные структуры радиокадра являются просто примерами, и могут быть сделаны различные модификации количества подкадров, включенных в радиокадр, количества слотов, включенных в подкадр, или количества символов, включенных в слот.
[62] Фиг. 3 представляет собой чертеж, иллюстрирующий ресурсную сетку слота нисходящей линии связи. Слот нисходящей линии связи включает в себя 7 OFDM-символов во временной области, и RB включает в себя 12 поднесущих в частотной области. Однако варианты осуществления настоящего изобретения не ограничиваются ими. Для нормального CP слот может включать в себя 7 OFDM-символов. Для расширенного CP слот может включать в себя 6 OFDM-символов. Каждый элемент в ресурсной сетке упоминается как ресурсный элемент (RE). RB включает в себя 12×7 RE. Количество NDL в RB, включенных в слот нисходящей линии связи, зависит от полосы частот передачи нисходящей линии связи. Слот восходящей линии связи может иметь такую же структуру, что и слот нисходящей линии связи.
[63] Фиг. 4 представляет собой чертеж, иллюстрирующий структуру подкадра нисходящей линии связи. До трех OFDM-символов в начале первого слота одного подкадра соответствует области управления, которой распределяется каналу управления. Остальные OFDM-символы соответствуют области данных, которой распределяется физический совместно используемый канал нисходящей линии связи (PDSCH). Примеры каналов управления нисходящей линии связи, используемых в системе LTE 3GPP, включают в себя, например, физический индикаторный канал управления форматом (PCFICH), физический канал управления нисходящей линии связи (PDCCH), физический индикаторный канал гибридного автоматического запроса на повторение (PHICH) и т.п. PCFICH располагается в первом OFDM-символе подкадра, перенося информацию о количестве OFDM-символов, используемых для каналов управления в подкадре. PHICH включает в себя сигнал подтверждения приема/отрицательного подтверждения приема (ACK/NACK) HARQ в качестве ответа на передачу восходящей линии связи. Информация управления, передаваемая по PDCCH, упоминается как информация управления нисходящей линии связи (DCI). DCI включает в себя информацию планирования восходящей линии связи или нисходящей линии связи или команду управления мощностью передачи восходящей линии связи для некоторой группы UE. PDCCH может включать в себя информацию о распределении ресурсов и формате передачи совместно используемого канала нисходящей линии связи (DL-SCH), информацию о распределении ресурсов совместно используемого канала восходящей линии связи (UL-SCH), информацию поискового вызова канала поискового вызова (PCH), системную информацию о DL-SCH, информацию о распределении ресурсов сообщений управления более высокого уровня, таких как ответ на запрос произвольного доступа (RAR), передаваемый по PDSCH, набор команд управления мощностью передачи для индивидуальных UE в некоторой группе UE, информацию управления мощностью передачи, информацию об активизировании передачи голоса по сети протокола Интернета (IP) и т.п. Множество PDCCH может передаваться в области управления. UE может выполнять мониторинг множества PDCCH. PDCCH передаются по агрегации из одного или нескольких смежных элементов канала управления (CCE). CCE представляет собой логическую единицу распределения, используемую для обеспечения PDCCH со скоростью кодирования на основе состояния радиоканала. CCE включает в себя набор RE. Формат и количество доступных битов для PDCCH определяются на основе корреляции между количеством CCE и скоростью кодирования, обеспечиваемой посредством CCE. BS определяет формат PDCCH в соответствии с DCI, подлежащей передаче на UE, и присоединяет циклический избыточный код (CRC) к информации управления. CRC маскируется временным идентификатором радиосети (RNTI) в соответствии с владельцем или использованием PDCCH. Если PDCCH предназначен для конкретного UE, CRC может маскироваться временным идентификатором сотовой радиосети (C-RNTI) UE. Если PDCCH предназначен для сообщения поискового вызова, CRC может маскироваться идентификатором индикатора поискового вызова (P-RNTI). Если PDCCH предназначен для системной информации (более конкретно, системного информационного блока (SIB)), CRC может маскироваться идентификатором системной информации и RNTI системной информации (SI-RNTI). Для указания ответа на запрос произвольного доступа на преамбулу произвольного доступа, принятую от UE, CRC может маскироваться RNTI произвольного доступа (RA-RNTI).
[64] Фиг. 5 представляет собой чертеж, иллюстрирующий структуру подкадра восходящей линии связи. Подкадр восходящей линии связи может делиться на область управления и область данных в частотной области. Физический канал управления восходящей линии связи (PUCCH), включающий в себя информацию управления восходящей линии связи, распределяется области управления. Физический совместно используемый канал восходящей линии связи (PUSCH), включающий в себя пользовательские данные, распределяется области данных. Чтобы поддерживать свойство единственной несущей, одно UE одновременно не передает PUCCH и PUSCH. PUCCH для одного UE распределяется паре RB в подкадре. RB пары RB занимает разные поднесущие в двух слотах. Таким образом, выполняется «скачкообразное переключение частоты» для пары RB, распределенной PUCCH, через границу слота.
[65] Моделирование системы со многими антеннами (MIMO)
[66] Ниже в данном документе описывается система MIMO. MIMO (много входов и много выходов) представляет собой схему использования множества передающих антенн и множества приемных антенн. При такой схеме может повышаться эффективность передачи и приема данных. Т.е. когда объект передачи или объект приема в системе беспроводной связи использует множество антенн, могут улучшаться пропускная способность и рабочие характеристики передачи. В данном описании изобретения MIMO может упоминаться как «многочисленная антенна».
[67] В многоантенной технологии прием одного полного сообщения не зависит от трассы единственной антенны. Вместо этого, фрагменты данных, принимаемые несколькими антеннами, собираются и объединяются в совокупность данных. С многоантенной технологией зона покрытия системы может быть расширена в зоне соты конкретного размера с улучшенной скоростью передачи данных или гарантированной конкретной скоростью передачи данных. Кроме того, данная технология может широко использоваться, например, терминалом мобильной связи и ретранслятором. В обычных случаях использовалась единственная передающая антенна и единственная приемная антенна. С многоантенной технологией может быть снято ограничение на скорость передачи в мобильной связи на основе обычной технологии, использующей единственную антенну.
[68] Одновременно может быть улучшена эффективность передачи данных. Среди различных технологий технология MIMO может существенно повышать пропускную способность связи и рабочие характеристики передачи/приема без дополнительного распределения частот или дополнительного увеличения мощности. Вследствие этого преимущества технология MIMO привлекает внимание многочисленных компаний и разработчиков.
[69] Фиг. 6 иллюстрирует конфигурацию системы беспроводной связи, имеющей многочисленные антенны (MIMO).
[70] Как показано на фиг. 6, NT передающих (Tx) антенн установлено на объекте передачи, и NR приемных (Rx) антенн установлено на объекте приема. Если как объект передачи, так и объект приема используют множество антенн, как показано на фигуре, получается большая теоретическая пропускная способность передачи канала, чем в случае, когда только один из объекта передачи и объекта приема использует множество антенн. Пропускная способность передачи канала увеличивается пропорционально количеству антенн. Следовательно, скорость передачи и эффективность использования частот улучшаются с увеличением пропускной способности передачи канала. Когда максимальная скорость передачи, получаемая с использованием одной антенны, равна Ro, скорость передачи, получаемая с использованием многочисленных антенн, теоретически может увеличиваться на максимальную скорость передачи Ro, умноженную на скорость увеличения Ri скорости, определяемую уравнением 1 ниже. Здесь Ri является меньшим из NT и NR.
[Уравнение 1]
[72] Например, система связи MIMO, которая использует четыре Tx-антенны и четыре Rx-антенны, может теоретически получать в четыре раза большую скорость передачи, получаемую системой с единственной антенной. После того как вышеупомянутое теоретическое повышение пропускной способности системы MIMO было продемонстрировано в середине 1990 годов, были проведены активные исследования в многочисленных технологиях, которые могут существенно повысить скорость передачи данных, и некоторые из технологий были отражены в многочисленных стандартах беспроводной связи, таких как, например, мобильная связь третьего поколения и беспроводная локальная сеть (LAN) следующего поколения.
[73] Были активно исследованы многочисленные технологии, ассоциированные с MIMO. Например, были активно проведены исследования в теории информации, связанные с пропускной способностью связи на основе MIMO, в различных канальных средах и средах множественного доступа, исследования радиочастотных (RF) канальных измерений и моделирования систем MIMO и исследования технологии пространственно-временной обработки сигналов.
[74] Ниже в данном документе подробно описывается математическое моделирования способа связи для использования в системе MIMO. Как показано на фиг. 6, предполагается, что система включает в себя NT Tx-антенн и NR Rx-антенн. В случае сигнала передачи максимальное количество порций передаваемой информации равно NT при условии, что используется NT Tx-антенн, и, таким образом, информация передачи может быть представлена вектором уравнения 2, приведенного ниже.
[75] [Уравнение 2]

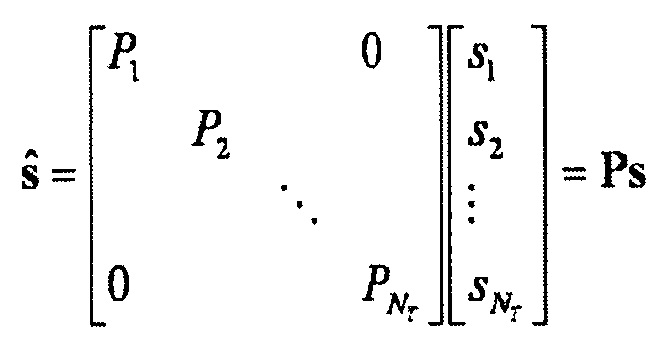
[76] Для соответствующих порций информации s1, s2, … sNT передачи могут использоваться разные мощности передачи. В данном случае, когда соответствующие мощности передачи обозначаются P1, P2, …, PNT, порции информации передачи, имеющие отрегулированные мощности передачи, могут выражаться уравнением 3 ниже.
[77] [Уравнение 3]

[78] 
[79] [Уравнение 4]
[80] Изобретатели предполагают, что весовая матрица W применяется к информационному вектору
[81] [Уравнение 5]
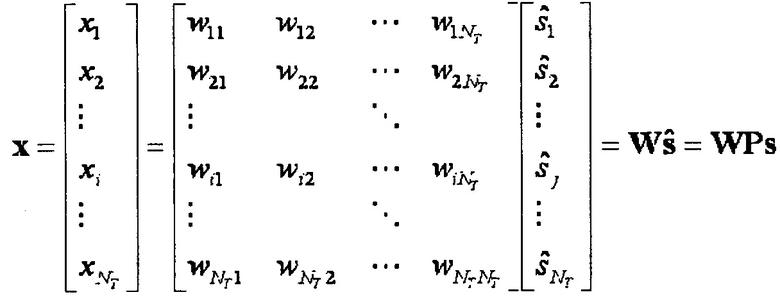
[82] В данном случае, Wij обозначает весовой коэффициент, соответствующий i-ой Tx-антенне и j-ой информации. W называется весовой матрицей или матрицей предварительного кодирования.
[83] Этот способ может рассматриваться другим образом с точки зрения типа технологии MIMO. Если один поток передается по нескольким антеннам, способ может рассматриваться как схема пространственного разнесения. В этом случае, элементы информационного вектора
[84] Когда используется NR Rx-антенн, принимаемые сигналы y1, y2, …, yNR индивидуальных антенн, могут выражаться вектором следующего уравнения.
[85] [Уравнение 6]
[86] Когда выполняется канальное моделирование в системе беспроводной связи MIMO, индивидуальные каналы могут различаться друг от друга индексами Tx/Rx-антенн. Изобретатели предполагают, что канал, проходящий от Tx-антенны j до Rx-антенны i, обозначается hij. При обозначении индексов для hij необходимо отметить, что сначала указывается индекс Rx-антенны, и затем указывается индекс Tx-антенны.
[87] Фиг. 6(b) изображает каналы от NT Tx-антенн до Rx-антенны i. Канала могут группироваться или выражаться в виде вектора или матрицы. На фиг. 6(b) каналы, поступающие на Rx-антенну i от NT Tx-антенн, могут быть представлены следующим уравнением.
[88] [Уравнение 7]

[89] Все каналы, поступающие на NR Rx-антенн от NT Tx-антенн, могут выражаться следующим образом.
[90] [Уравнение 8]
[91] Фактически, к каналам добавляется аддитивный белый гауссов шум (AWGN) после применения канальной матрицы H. AWGN n1, n2, …, nNR, добавляемый к NR Rx-антеннам, может быть выражен следующим уравнением.
[92] [Уравнение 9]
[93] Принимаемые сигналы в соответствии с математическим моделированием, описанным выше, могут быть выражены следующим уравнением.
[94] [Уравнение 10]
[95] Количество строк и столбцов канальной матрицы H, указывающей состояние канала, определяется количеством Tx/Rx-антенн. В канальной матрице H количество строк равно количеству Rx-антенн NR, и количество столбцов равно количеству Tx-антенн NT. Т.е. канальная матрица H представляет собой матрицу размера NR×NT.
[96] Ранг матрицы определяется как меньшее из количества независимых строк и количества независимых столбцов матрицы. Поэтому, ранг матрицы не может быть выше количества строк или столбцов. Ранг канальной матрицы H может ограничиваться так, как выражено следующим уравнением.
[97] [Уравнение 11]
[98] 
[99] Ранг может определяться как количество ненулевых собственных чисел, полученных тогда, когда выполняется разложение по собственным числам матрицы. Аналогично, ранг может определяться как количество ненулевых сингулярных чисел, полученных тогда, когда выполняется разложение по сингулярным числам матрицы. Следовательно, ранг канальной матрицы физически означает максимальное количество порций информации, которое является передаваемым по данному каналу.
[100] Измерения посредством UE
[101] В некоторых случаях UE необходимо выполнять измерение нисходящей линии связи. Например, чтобы BS поддерживала операцию эстафетной передачи обслуживания UE или координацию межсотовых помех, UE необходимо выполнять измерения DL и предоставлять BS отчет о результате измерения DL. Измерение DL включает в себя различные схемы измерения, такие как, например, измерение для мониторинга радиолинии (RLM), измерение для предоставления отчета об информации о состоянии канала (CSI) и измерение управления радиоресурсами (RRM) и различные значения измерений.
[102] Измерения RLM могут включать в себя, например, измерение DL, которое используется в процессе обнаружения сбоя радиолинии связи (RLF) и нахождения новой радиолинии связи. Измерение для предоставления отчета о CSI может включать в себя, например, измерение качества канала нисходящей линии связи, выполняемое посредством UE, для выбора/вычисления и предоставления отчета о соответствующем индикаторе ранга, соответствующем индикаторе матрицы предварительного кодирования и соответствующем индикаторе качества канала. Измерение RRM может включать в себя, например, измерение для определения присутствия или отсутствия эстафетной передачи обслуживания UE.
[103] Измерение RRM может включать в себя измерения мощности принимаемого опорного сигнала (RSRP), качества принимаемого опорного сигнала (RSRQ), индикатора уровня принимаемого сигнала (RSSI) и т.п.
[104] RSRP определяется как линейное среднее мощностей ресурсного элемента, который переносит характерный для соты RS (CRS) в измеряемой полосе частот. UE может определять RSRP посредством обнаружения CRS, передаваемого отображением на конкретный ресурсный элемент. Для вычисления RSRP может, в основном, использоваться CRS (R0) для антенного порта 0. Если UE способно надежно обнаруживать CRS (R1) для антенного порта 1, RSRP может определяться с использованием R1 в дополнение к R0. В отношении подробностей характерного для соты RS ссылка может выполняться на документ стандарта (например, 3GPP TS36.211) и описание, приведенное ниже с ссылкой на фиг. 7.
[105] RSRQ определяется как значение, получаемое делением значения, полученного умножением RSRP на количество N ресурсных блоков в измеряемой полосе частот, на «RSSI несущей E-UTRA» (т.е. RSRQ=N×RSRP/(RSSI несущей E-UTRA)). Числитель (N×RSRP) и знаменатель (RSSI несущей E-UTRA) измеряются для одного и того же набора ресурсных блоков.
[106] «RSSI несущей E-UTRA» включает в себя линейное среднее полной принимаемой мощности, измеренной на сигналах, принимаемых от всех источников, включая обслуживающие и необслуживающие соты общего канала, помехи соседнего канала и тепловой шум, посредством UE только для OFDM-символов, включая опорный символ, для антенного порта 0 (т.е. CRS для антенного порта 0) по N ресурсным блокам в полосе измерения.
[107] «RSSI несущей FDD UTRA» определяется как принимаемая широкополосная мощность, включающая шум, генерируемый приемником, и тепловой шум в полосе, определенной фильтром формирования импульса приемника.
[108] «RSSI несущей TDD UTRA» определяется как принимаемая широкополосная мощность, включающая шум, генерируемый приемником, и тепловой шум в полосе, определенной фильтром формирования импульса приемника в пределах конкретного временного слота.
[109] Ссылка может выполняться на документ стандарта (например, 3GPP TS36.214) в отношении описании измерения канала DL кроме описания, приведенного выше, и для ясности опускается подробное описание измерения канала DL. Однако очевидно, что подробности измерения канала DL, описанного в стандарте, применимы к измерениям канала DL, применяемым в различных вариантах осуществления настоящего изобретения, описанных ниже.
[110] Опорный сигнал; RS
[111] Ниже в данном документе описывается опорный сигнал (RS).
[112] В системе беспроводной связи, так как пакеты передаются по радиоканалу, сигнал может искажаться во время передачи. Чтобы предоставить возможность приемной стороне корректно принимать искаженный сигнал, искажение принимаемого сигнала должно корректироваться с использованием информации о канале. Чтобы обнаруживать информацию о канале, используется, главным образом, способ передачи сигнала, который известен как передающей стороне, так и приемной стороне, и обнаружения информации о канале, используя степень искажения, когда сигнал принимается по каналу. Вышеупомянутый сигнал упоминается как пилот-сигнал или опорный сигнал (RS).
[113] Недавно в большинстве систем мобильной связи, когда передаются пакеты, использовался способ улучшения эффективности передачи/приема данных, использующий многочисленные передающие антенны и многочисленные приемные антенны, в отличие от предшествующего уровня техники, использующего одну передающую антенну и одну приемную антенну. В случае, в котором передатчик или приемник использует многочисленные антенны, чтобы повысить пропускную способность или улучшить рабочие характеристики, чтобы точно принимать сигнал, состояния канала между передающими антеннами и приемными антеннами должны получаться из соответствующих RS передающих антенн.
[114] В системе беспроводной связи RS могут быть, главным образом, разделены на два RS в соответствии с их назначением: RS для получения информации о канале и RS, используемый для демодуляции данных. Первый используется для того, чтобы дать возможность пользовательскому оборудованию (UE) получать информацию о канале нисходящей линии связи, и, таким образом, должен передаваться в широкой полосе. Следовательно, даже UE, которое не передает данные по нисходящей линии связи в конкретном подкадре, должно принимать этот RS и выполнять измерение канала. Кроме того, этот RS также используется для измерения для управлению мобильностью, такого эстафетная передача обслуживания или т.п.
[115] Последний представляет собой RS, который посылается вместе, когда базовая станция (eNB) посылает данные нисходящей линии связи. UE может принимать этот RS, чтобы выполнять оценку канала и демодулировать данные. Этот RS должен передаваться в области, в которой передаются данные.
[116] В системе LTE два RS нисходящей линии связи определяются для одноадресной услуги. Более конкретно, существует общий RS (CRS) для измерения, ассоциированного с эстафетной передачей обслуживания и получением информации о состоянии канала, и выделенный RS (DRS), используемый для демодуляции данных. CRS может упоминаться как характерный для соты RS, и DRS может упоминаться как характерный для UE RS.
[117] В системе LTE DRS используется только для демодуляции данных, и CRS используется для получения информации о канале и демодуляции данных.
[118] Приемная сторона (UE) может оценивать состояния канала из CRS и посылать обратно связанный с качеством канала индикатор, такой как индикатор качества канала (CQI), индекс матрицы предварительного кодирования (PMI) и/или индикатор ранга (RI), на передающую сторону (eNB). Альтернативно, RS, относящийся к обратной связи информации о состоянии канала (CSI), такой как CQI/PMI/RI, может отдельно определяться как CSI-RS. CRS также может упоминаться как характерный для соты опорный сигнал. CRS передается в каждом подкадре в широкой полосе в качестве характерного для соты опорного сигнала. Кроме того, CRS передается на основании вплоть до четырех антенных портов в соответствии с количеством Tx-антенн в eNB.
[119] Между тем, когда необходима демодуляция данных на PDSCH, DRS может передаваться посредством соответствующего RE. UE может принимать от более высокого уровня индикацию, сигнализирующую присутствие или отсутствие DRS, и также может принимать, только если отображается PDSCH, индикацию, сигнализирующую, что DRS является действительным. DRS может упоминаться как характерный для UE опорный сигнал или опорный сигнал демодуляции (DMRS).
[120] Фиг. 7 представляет собой чертеж, иллюстрирующий шаблон отображения CRS и DRS, определенных в существующей системе LTE 3GPP (например, версии 8), на пары ресурсных блоков (RB). Пара RB нисходящей линии связи, в качестве единицы, на которую отображается RS, может выражаться в единице одного подкадра во временной области × 12 поднесущих в частотной области. Т.е. длительность одной пары RB составляет 14 OFDM-символов для нормального CP (фиг. 7(a)) и 12 OFDM-символов для расширенного CP (фиг. 7(b)).
[121] Фиг. 7 изображает расположения RS на парах RB в системе, в которой BS поддерживает четыре передающих антенны. На фиг. 7 ресурсные элементы (RE), обозначенные «0», «1», «2» и «3», представляют расположения CRS для индексов 0, 1, 2 и 3 антенных портов соответственно. На фиг. 7 RE, обозначенные «D», представляют расположения DMRS.
[122] Ниже в данном документе подробно описывается CRS.
[123] CRS используется для оценки канала физического конца антенны и распределяется по всей полосе в качестве опорного сигнала, который может приниматься совместно всеми UE в соте. CRS может использоваться с целью получения CSI и демодуляции данных.
[124] CRS определяется в различных видах в соответствии с конфигурацией антенн на передающей стороне (eNB). Система LTE 3GPP (например, версия 8) поддерживает различные антенные конфигурации, и передающая сторона (eNB) сигнала нисходящей линии связи имеет три типа антенных конфигураций, включая единственную антенну, 2 Tx-антенны и 4 Tx-антенны. Если eNB выполняет передачу по единственной антенне, применяется опорный сигнал для единственного антенного порта. Если eNB выполняет 2-антенную передачу, применяются опорные сигналы для двух антенных портов в соответствии со схемой мультиплексирования с временным разделением и/или схемой мультиплексирования с частотным разделением. Т.е. опорные сигналы для двух антенных портов могут отличатся друг от друга расположением на разных временных ресурсах и/или разных частотных ресурсах. Если eNB выполняет 4-антенную передачу, опорные сигналы для четырех антенных портов применяются в соответствии со схемой TDM/FDM (мультиплексирование с временным разделением/мультиплексирование с частотным разделением). Информация о канале, оцененная приемной стороной (UE) сигнала нисходящей линии связи посредством CRS, может использоваться для демодуляции данных, передаваемых с использованием методов передачи, таких как передача с единственной антенной, разнесение на передаче, пространственное мультиплексирование с обратной связью, пространственное мультиплексирование без обратной связи и многопользовательское MIMO (MU-MIMO).
[125] Если поддерживаются многочисленные антенны, опорный сигнал передается по некоторому антенному порту в положении RE, обозначенного в соответствии с шаблоном RS, и сигнал не передается в положении RS, обозначенного для других антенных портов.
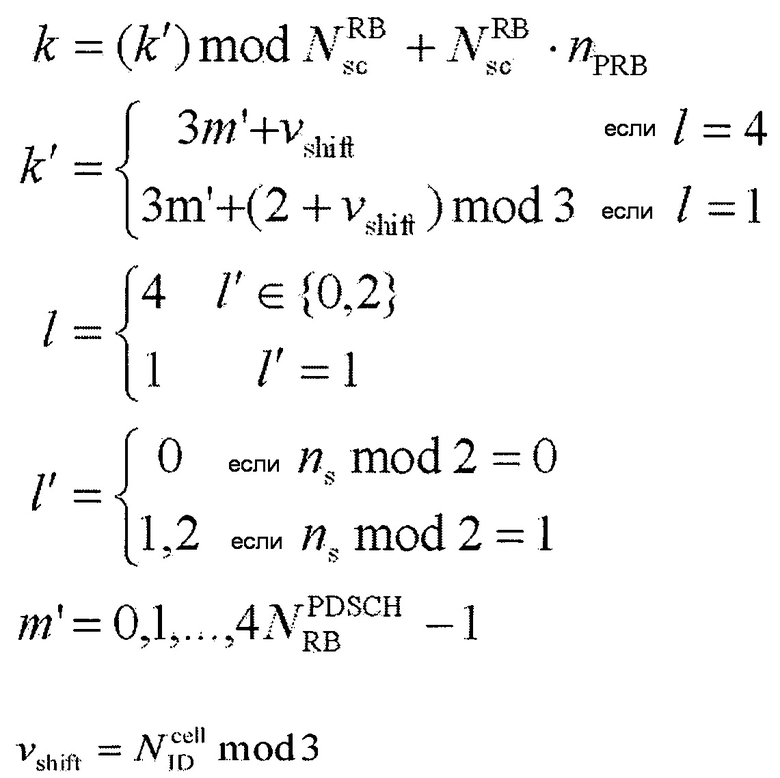
[126] Правило, посредством которого CRS отображается на RB, выражается уравнением 12, приведенным ниже.
[127] [Уравнение 12]
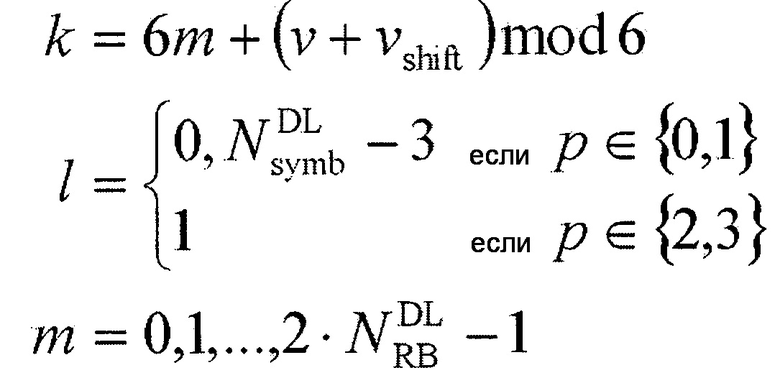

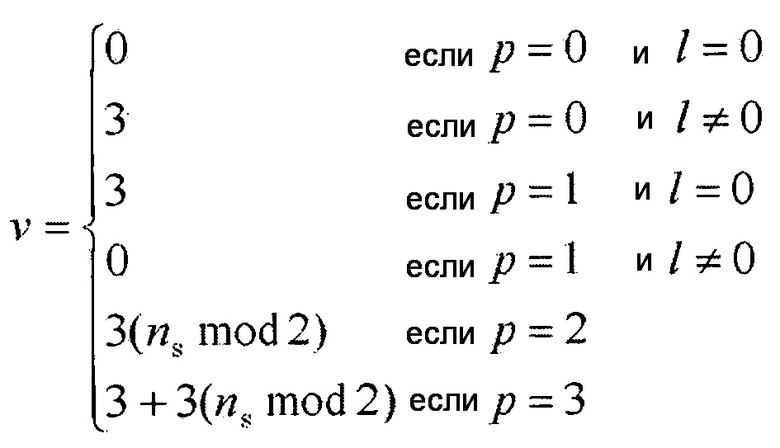
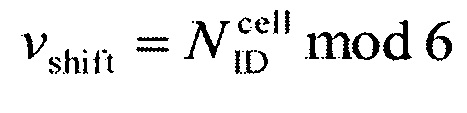
[128] В уравнении 12 k представляет собой индекс поднесущей, l представляет собой индекс символа, и p представляет собой индекс антенного порта. 


[129] В частности, чтобы улучшить рабочие характеристики оценки канала посредством CRS, расположение CRS в частотной области может устанавливаться по-разному для соответствующих сот посредством сдвига расположения CRS. Например, опорные сигналы располагаются на каждых 3 поднесущих, одна сота может располагаться на поднесущей 3k, и другая сота может располагаться на поднесущей 3k+1. Опорный сигнал для одного антенного порта располагается с интервалами 6 RE (т.е. 6 поднесущих) в частотной области, и сохраняется отнесенными от опорного сигнала для другого антенного порта на 3 RE в частотной области.
[130] Кроме того, к CRS может применяться повышение мощности. Повышение мощности означает передачу опорного сигнала, используя высокую мощность RE, кроме RE, распределенных опорному сигналу из числа RE одного OFDM-символа.
[131] Во временной области опорные сигналы располагаются с постоянными интервалами, начиная с индекса (1) 0 символа каждого слота. Временной интервал определяется по-разному в соответствии с длительностью CP. Для нормального CP опорные сигналы располагаются по индексам 0 и 4 символа слота. Для расширенного CP опорные сигналы располагаются по индексам 0 и 3 символа слота. Опорный сигнал для вплоть до двух антенных портов определяется на каждом OFDM-символе. Следовательно, в случае передачи по 4 Tx-антеннам опорные сигналы для антенных портов 0 и 1 располагаются на индексах 0 и 4 символа слота (индексы 0 и 3 символа для расширенного CP), и опорные сигналы для антенных портов 2 и 3 располагаются на индексе 1 символа слота. Расположения опорных сигналов для антенных портов 2 и 3 в частотной области переключаются во втором слоте.
[132] Чтобы поддерживать пространственную эффективность более высокой, чем в существующей системе LTE 3GPP (например, версии 8), может быть разработана система, имеющая расширенную антенную конфигурацию (например, система LTE-A). Расширенная антенная конфигурация может представлять собой, например, конфигурацию с 8 Tx-антеннами. В системе, имеющей такую расширенную антенну, необходимо поддерживать UE, работающие в обычной антенной конфигурации, а именно поддерживать обратную совместимость. Следовательно, необходимо, чтобы поддерживался шаблон опорного сигнала в соответствии с обычной антенной конфигурацией, и необходимо, чтобы был разработан новый шаблон опорного сигнала для дополнительной антенной конфигурации. В данном случае, если CRS для нового антенного порта добавляется в систему, имеющую обычную антенную конфигурацию, значительно увеличивается служебная информация опорного сигнала, таким образом снижая скорость передачи данных. С учетом этого, отдельный опорный сигнал для измерения CSI (CSI-RS) для нового антенного порта может быть введен в системе LTE-A (усовершенствованная), которая представляет собой эволюцию LTE 3GPP. Ниже описывается CSI-RS, который представляет собой отдельный опорный сигнал.
[133] Ниже в данном документе приводится подробное описание DRS.
[134] DRS (или характерный для UE опорный сигнал) представляет собой опорный сигнал, используемый для демодуляции данных. К опорному сигналу может применяться весовой коэффициент предварительного кодирования, используемый для конкретного UE при выполнении передачи антенной. Таким образом, если UE принимает опорный сигнал, UE может оценивать эквивалентный канал, который представляет собой комбинацию весового коэффициента предварительного кодирования, передаваемого по каждой передающей антенне, с каналом передачи.
[135] В существующей системе LTE 3GPP (например, версии 8) поддерживается передача посредством вплоть до 4 Tx-антенн, и определяется DRS для формирования направленного луча ранга 1. DRS для формирования направленного луча ранга 1 может указываться опорным сигналом для индекса 5 антенного порта. Правило, посредством которого DRS отображается на RB, соответствует уравнениям 13 и 14, приведенным ниже. Уравнение 13 применяется к нормальному CP, и уравнение 14 применяется к расширенному CP.
[136] [Уравнение 13]
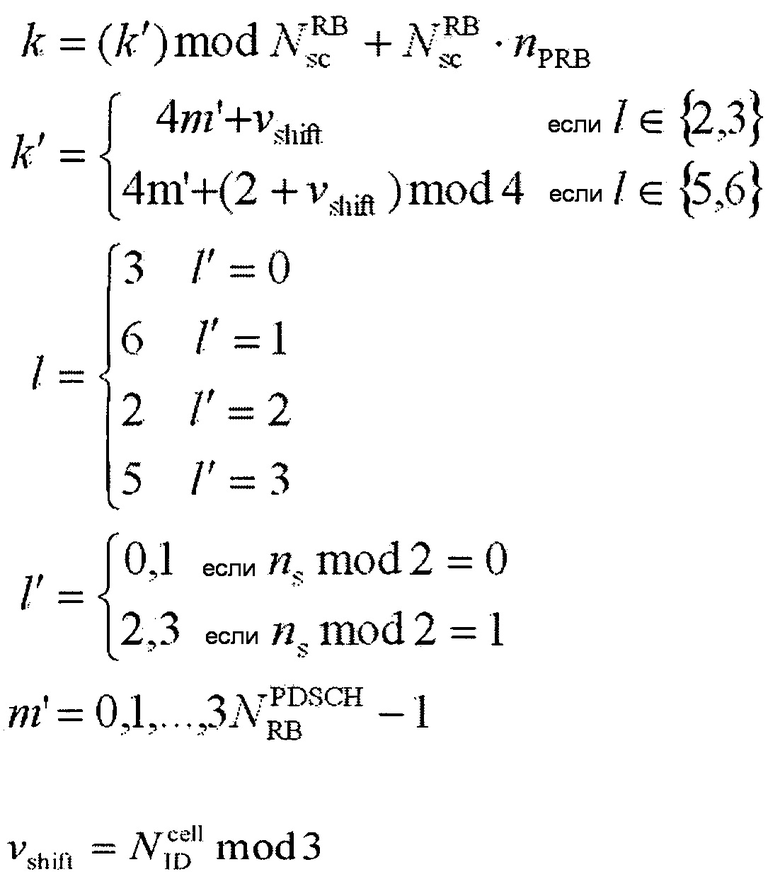
[137] [Уравнение 14]
[138] В уравнении 13 и 14 k представляет собой индекс поднесущей, l представляет собой индекс символа, и p представляет собой индекс антенного порта. 

[139] В системе LTE-A (усовершенствованная), которая является эволюцией LTE 3GPP, принимаются во внимание MIMO высокого порядка, многосотая передача и усовершенствованное MIMO. Чтобы поддерживать эффективное управление опорным сигналом и усовершенствованную схему передачи, принимается во внимание демодуляция данных на основе DRS. Т.е. отдельно от DRS (индекс 5 антенного порта) для формирования направленного луча ранга 1, определенного в существующей LTE 3GPP (например, версии 8), DRS для двух или более уровней может определяться для поддержки передачи данных по добавленной антенне.
[140] Между тем, как описано выше, в системе LTE CRS передается на основе максимум четырех антенных портов в соответствии с количеством передающих антенн. Например, если количество передающих антенн базовой станции равно двум, передаются CRS для антенных портов 0 и 1, и, если количество передающих антенн равно четырем, передаются CRS для антенных портов 1-3.
[141] Фиг. 8 представляет собой чертеж, изображающий общий шаблон CRS в случае, в котором количество портов передающих антенн равно 4 в системе LTE.
[142] Как показано на фиг. 8, если CRS отображаются на частотно-временные ресурсы в системе LTE, RS для одного антенного порта на частотной оси передается в состоянии отображения на один RE из числа 6 RE. Так как один RB включает в себя 12 RE на частотной оси, два RE одного RB используются в качестве RE для одного антенного порта.
[143] В системе LTE-A, усовершенствованном виде системы LTE, базовая станция (eNB) должна разрабатываться с возможностью поддержки максимум восьми передающих антенн на нисходящей линии связи. Следовательно, также должна поддерживаться передача RS для максимум восьми передающих антенн.
[144] Более конкретно, так как только RS для максимум четырех антенных портов определяются в качестве RS нисходящей линии связи в системе LTE, если eNB имеет от четырех до восьми передающих антенн нисходящей линии связи в системе LTE-A, должны быть дополнительно определены RS для этих антенн. RS для измерения канала и RS для демодуляции данных должны быть разработаны в качестве RS для максимум восьми передающих антенных портов.
[145] Одним важным фактором при разработке системы LTE-A является обратная совместимость. Т.е. UE LTE должно хорошо работать даже в системе LTE-A, и система LTE-A должна поддерживать UE LTE. С точки зрения передачи RS в частотно-временной области, в которой передаются CRS, определенные в системе LTE, должны быть дополнительно определены RS для максимум восьми передающих антенных портов. Однако в системе LTE-A, если шаблон RS для максимум восьми передающих антенн добавляется ко всей полосе на подкадр, используя этот же способ, что и CRS обычной системы LTE, избыточно возрастает служебная информация.
[146] Следовательно, RS, вновь разработанные в системе LTE-A, грубо разделяются на два типа: RS измерения канала (RS с информацией о состоянии канала (CSI-RS)) для выбора схемы модуляции и кодирования (MCS), индикатора матрицы предварительного кодирования (PMI) или т.п. и RS демодуляции (DM-RS) для демодуляции данных, передаваемых по восьми передающим антеннам.
[147] CSI-RS используется только для измерения канала, тогда как существующий CRS используется для измерения канала, измерения эстафетной передачи обслуживания или демодуляции данных. Так как CSI-RS передается для получения информации о состоянии канала, CSI-RS может не передаваться на каждый подкадр, в отличие от CRS. В настоящее время, в стандарте LTE-A, CSI-RS могут распределяться антенным портам 15-22, и определяется, что информация установки CSI-RS принимается посредством сигнализации более высокого уровня.
[148] Кроме того, для демодуляции данных DM-RS передается на UE с планированием в соответствующей частотно-временной области в качестве DRS. Т.е. DM-RS, передаваемый на конкретное UE, передается только в области, запланированной для UE, т.е. в частотно-временной области, в которой UE принимает данные.
[149] В системе LTE-A, поддерживающей до восьми Tx-антенн нисходящей линии связи, eNB должен передавать CSI-RS для всех антенных портов, как описано выше. Так как передача CSI-RS для вплоть до восьми Tx-антенных портов в каждом подкадре приводит к слишком большому количеству служебной информации, CSI-RS должны передаваться с перерывами по временной оси, чтобы таким образом уменьшить служебную информацию CSI-RS. Поэтому, CSI-RS могут передаваться периодически при каждом целом кратном одного подкадра или по предварительно определенному шаблону передачи.
[150] Период передачи CSI-RS или шаблон CSI-RS могут конфигурироваться посредством eNB. Для измерения CSI-RS UE должно иметь сведения о конфигурации CSI-RS, которая была установлена для антенных портов CSI-RS на их обслуживающей соте. Конфигурация CSI-RS может задавать индекс подкадра нисходящей линии связи, переносящего CSI-RS, частотно-временные положения RE CSI-RS в подкадре нисходящей линии связи, последовательность CSI-RS (последовательность, используемая для CSI-RS, генерируемая псевдослучайно на основе номера слота, ID соты, длительности CP и т.д. в соответствии с предварительно определенным правилом) и т.д. Т.е. данный eNB может использовать множество конфигураций CSI-RS и может указывать конфигурацию CSI-RS, выбранную для использования из числа множества конфигураций CSI-RS, для UE (многих UE) в своей соте.
[151] Для идентификации CSI-RS для каждого антенного порта ресурсы, переносящие CSI-RS для антенного порта, должны быть ортогональны ресурсам, переносящим CSI-RS для других антенных портов. Как описано выше с ссылкой на фиг. 8, CSI-RS для разных антенных портов могут мультиплексироваться в FDM, используя ортогональные частотные ресурсы, в TDM, используя ортогональные временные ресурсы, и/или в мультиплексировании с кодовым разделением (CDM), используя ортогональные кодовые ресурсы.
[152] При уведомлении UE в соте об информации CSI-RS (т.е. конфигурации CSI-RS) eNB должен сначала передавать на UE информацию о частотно-временных ресурсах (временную информацию и частотную информацию), на которые отображается CSI-RS для каждого антенного порта. Более конкретно, временная информация может включать в себя количество подкадров, переносящих CSI-RS, период передачи CSI-RS, смещения подкадра передачи CSI-RS и количество OFDM-символов, переносящих RE CSI-RS для антенны. Частотная информация может включать в себя частотный промежуток между RE CSI-RS для антенны и значение смещения или сдвига RE CSI-RS по частотной оси.
[153] Фиг. 9 иллюстрирует примерную периодическую передачу CSI-RS. CSI-RS может передаваться периодически при каждом целом кратном одного подкадра (например, в каждом 5, 10, 20, 40 или 80 подкадрах).
[154] Как показано на фиг. 9, один радиокадр делится на 10 подкадров, подкадр 0 - подкадр 9. eNB передает CSI-RS с периодом передачи CSI-RS 10 мс (т.е. в каждых 10 подкадрах) и смещением передачи CSI-RS 3, в качестве примера. Разные eNB могут иметь разные смещения передачи CSI-RS, так что CSI-RS, передаваемые из множества сот, равномерно распределяются во времени. Если CSI-RS передается каждые 10 мс, его смещение передачи CSI-RS может составлять от 0 до 9. Аналогично, если CSI-RS передается каждые 5 мс, смещение передачи CSI-RS может составлять от 0 до 4. Если CSI-RS передается каждые 20 мс, смещение передачи CSI-RS может составлять от 0 до 19. Если CSI-RS передается каждые 40 мс, смещение передачи CSI-RS может составлять от 0 до 39. Если CSI-RS передается каждые 80 мс, смещение передачи CSI-RS может составлять от 0 до 79. Смещение передачи CSI-RS указывает подкадр, в котором eNB начинает передачу CSI-RS в каждом предварительно определенном периоде. Когда eNB сигнализирует период и смещение передачи CSI-RS на UE, UE может принимать CSI-RS от eNB в подкадрах, определенных периодом и смещением передачи CSI-RS. UE может измерять канал, используя принимаемый CSI-RS, и, таким образом, может предоставлять отчет о такой информации в виде индикатора качества канала (CQI), PMI и/или индикатора ранга (RI) на eNB. Если в данном документе не описываются отдельно CQI, PMI и RI, они могут вместе упоминаться как CQI (или CSI). Вышеупомянутая информация, относящаяся к CSI-RS, является характерной для соты информацией, общей для UE в соте. Период и смещение передачи CSI-RS могут устанавливаться отдельно для каждой индивидуальной конфигурации CSI-RS. Например, периоды и смещения передачи CSI-RS могут устанавливаться отдельно для конфигурации CSI-RS для CSI-RS, передаваемых с нулевой мощностью передачи, и конфигурации CSI-RS для CSI-RS, передаваемых с ненулевой мощностью передачи.
[155] Фиг. 10 иллюстрирует примерную апериодическую передачу CSI-RS. Как показано на фиг. 10, один радиокадр делится на 10 подкадров, подкадр 0 - подкадр 9. Подкадры, переносящие CSI-RS, могут указываться по предварительно определенному шаблону. Например, шаблон передачи CSI-RS может формироваться в единицах 10 подкадров, и 1-битовый индикатор может устанавливаться для каждого подкадра для указания, переносит ли подкадр CSI-RS. В изображенном случае на фиг. 10, шаблон CSI-RS сообщает, что подкадр 3 и подкадр 4 из 10 подкадров (т.е. подкадра 0 - подкадра 9) переносят CSI-RS. Такие 1-битовые индикаторы могут передаваться на UE посредством сигнализации более высокого уровня.
[156] Доступны различные конфигурации CSI-RS, как описано выше. Чтобы предоставить возможность UE принимать надежно CSI-RS для измерения канала, eNB необходимо сигнализировать конфигурацию CSI-RS на UE. Ниже приводится описание вариантов осуществления настоящего изобретения для сигнализации конфигурации CSI-RS на UE.
[157] Сигнализация конфигурации CSI-RS
[158] eNB может сигнализировать конфигурацию CSI-RS на UE двумя способами.
[159] Один из способов заключается в том, что eNB широковещательно передает информацию о конфигурации CSI-RS на UE посредством сигнализации по динамическому широковещательному каналу (DBCH).
[160] В существующей системе LTE eNB может передавать системную информацию на UE по широковещательному каналу (BCH). Если системной информации слишком много для передачи по BCH, eNB может передавать системную информацию таким же образом, как и передача данных нисходящей линии связи. А именно, eNB может маскировать CRC PDCCH, ассоциированного с системной информацией, посредством SI-RNTI вместо конкретного ID UE. Таким образом, системная информация передается по PDSCH подобно одноадресным данным. Все UE в соте могут декодировать PDCCH, используя SI-RNTI и, таким образом, могут получать системную информацию посредством декодирования PDSCH, указанного посредством PDCCH. Эта широковещательная схема может упоминаться как сигнализация DBCH, отличимая от общей сигнализации физического BCH (PBCH).
[161] Два типа системной информации обычно широковещательно передаются в существующей системе LTE. Одним типом системной информации является ведущий информационный блок (MIB), передаваемый по PBCH, и другим типом системной информации является системный информационный блок (SIB), мультиплексируемый с общими одноадресными данными в области PDSCH. Так как существующая система LTE определяет тип 1 SIB - тип 8 SIB (SIB1 - SIB8) для передачи системной информации новый тип SIB может определяться для информации о конфигурации CSI-RS, который является новой системной информацией, которая не определена в качестве никакого обычного типа SIB. Например, SIB9 или SIB10 могут определяться, и eNB может передавать информацию о конфигурации CSI-RS на многие UE в их соте в SIB9 или SIB10 посредством сигнализации DBCH.
[162] Другой способ сигнализации информации о конфигурации CSI-RS заключается в том, что eNB передает информацию о конфигурации CSI-RS на каждое UE посредством сигнализации управления радиоресурсами (RRC). Т.е. информация о конфигурации CSI-RS может предоставляться каждому UE в соте посредством выделенной сигнализации RRC. Например, когда UE устанавливает соединение с eNB во время начального доступа или эстафетной передачи обслуживания, eNB может передавать информацию о конфигурации CSI-RS на UE посредством сигнализации RRC. Альтернативно или дополнительно, eNB может сигнализировать на UE информацию о конфигурации CSI-RS на UE в сообщении сигнализации RRC, запрашивающем обратную связь о состоянии канала, основываясь на измерении CSI-RS.
[163] Вышеупомянутые два способа для сигнализации конфигураций CSI-RS и конфигурация CSI-RS, подлежащая использованию для обратной связи CSI на UE, применимы к вариантам осуществления настоящего изобретения.
[164] Ниже в данном документе приводится описание конкретного варианта осуществления настоящего изобретения, относящегося к способу приема конкретным UE информации о синхронизации для прямой связи между UE, используя опорный сигнал, как упомянуто выше.
[165] Перед описанием настоящего изобретения описывается прямая связь между UE. Фиг. 11 представляет собой схему концептуального представления прямой связи между UE.
[166] Как показано на фиг. 11, UE1 1111 и UE2 1113 выполняют прямую связь друг с другом. В данном случае, UE ссылается на терминал пользователя. Если сетевое оборудование, такое как BS, передает и принимает сигнал в соответствии со схемой связи между UE, она может рассматриваться как вид UE. В тоже время, eNB может управлять расположением частотно-временного ресурса, мощностью передачи и т.п. для прямой связи между UE посредством надлежащего сигнала управления. Однако, если UE расположены вне зоны покрытия eNB, прямая связь между UE может выполняться без сигнала управления eNB. Ниже в данном документе прямая связь между UE упоминается как связь устройство-устройство (D2D). Кроме того, линия связи, подключенная для прямой связи между UE, упоминается как линия связи D2D, и линия связи, по которой UE выполняет связь с eNB, упоминается как линия связи eNB-UE (NU).
[167] Типовая операция D2D включает в себя операцию обнаружения D2D и операцию выполнения связи D2D. Каждое UE 1111, 1113 выполняет обнаружение D2D, чтобы проверить, располагается ли аналогичное UE для выполнения связи D2D в области, где возможна операция D2D. Каждое UE 1111, 1113 передает уникальный сигнал обнаружения для идентификации UE. Если соседнее UE обнаруживает сигнал обнаружения, соседнее UE может распознать, что соответствующее UE находится в близком расположении. Каждое UE 1111, 1113 проверяет, располагается ли близко аналогичное UE, требующее выполнения операции выполнения связи D2D, посредством операции обнаружения и затем выполняет связь D2D для передачи и приема данных.
[168] Операция обнаружения D2D и операция выполнения связи D2D могут выполняться между UE, выполняющими подключение к eNB для выполнения связи в пределах связи зоны покрытия или между UE, которые располагаются вне зоны покрытия eNB и не подключены к eNB. Альтернативно, по меньшей мере одно из двух UE, подключенных к линии связи D2D, может располагаться внутри зоны покрытия eNB, и другое может располагаться вне зоны покрытия зоны покрытия eNB. Присутствует ли UE или нет в пределах зоны покрытия, может проверяться с использованием качества приема опорного сигнала, передаваемого eNB. В частности, UE может измерять RSRP или RSRQ опорного сигнала eNB. Если измеренные RSRP или RSRQ меньше или равны некоторому уровню, может определяться, что UE находится вне зоны покрытия.
[169] Если UE, расположенное в пределах зоны покрытия eNB, передает сигнал обнаружения, является полезным во многих случаях, чтобы сигнал обнаружения синхронизировался с сигналом eNB. Это потому, что операция синхронизации, которая необходима для передачи и приема сигнала обнаружения, может опускаться, если несколько UE внутри зоны покрытия синхронизируются с сигналом одного eNB. В этом случае, если конкретному UE разрешено выполнять операцию обнаружения с UE, подключенным к соседней соте, может быть расширена зона покрытия сигнала обнаружения. Кроме того, когда конкретное UE выполняет операцию эстафетной передачи обслуживания для переключения обслуживающей соты, может сохраняться синхронизация сигнала обнаружения, если синхронизация сигнала обнаружения не связана непосредственно с обслуживающей сотой.
[170] Фиг. 12 представляет собой чертеж, иллюстрирующий способ приема информации о синхронизации для прямой связи между UE, когда UE подключены к разным eNB, согласно варианту осуществления настоящего изобретения. Ниже в данном документе приводится описание метода, который конкретное UE использует для выполнения операции обнаружения с UE, подключенным к соседней соте, с ссылкой на фиг. 12. На этой фигуре предполагается, что UE1 1111 и UE2 1113 подключены к eNB1 1110, и UE3 1121 и UE4 1123 подключены к eNB2 1120.
[171] Если передача и прием сигнала между UE3 1121 (или UE4) и eNB синхронизируются с сигналом eNB2 1120, который является обслуживающей сотой, UE3 необходимо синхронизироваться с eNB1 1110, который является соседней сотой, чтобы принимать или передавать сигнал обнаружения от или на UE1 1111 (или UE2), подключенное к eNB1 1110.
[172] Даже если моменты времени передачи всех сот полностью синхронизированы, eNB каждой соты может иметь разную задержку распространения в отношении положения конкретного UE. Следовательно, моменты времени приема сигнала соответствующих сот, наблюдаемых посредством UE, могут не быть идентичными друг другу. Кроме того, если ошибка синхронизации между eNB является большой, или eNB не синхронизированы, операция обнаружения между UE, которые синхронизированы с разными сотами, может вызывать дополнительное затруднение.
[173] Для решения этой проблемы настоящее изобретение предлагает, чтобы множество сот были сгруппированы в один кластер обнаружения D2D, и чтобы выбиралась одна представительная сота на кластер. Кроме того, настоящее изобретение предлагает, чтобы все UE в одном кластере выполняли операцию обнаружения синхронно с соответствующей представительной сотой.
[174] Ниже в данном документе предполагается, что eNB1 1110 и eNB2 1120 формируют один кластер обнаружения D2D, и eNB1 выбирается в качестве представительной соты. UE1 1111 передает сигнал обнаружения синхронно с eNB1 1110, который является обслуживающей сотой для UE и представительной сотой кластера. UE3 1121 и UE4 1123, которые подключены к eNB2, распознают, что сигнал обнаружения синхронизирован с eNB1. UE3 1121 и UE4 1123 сначала получают синхронизацию от eNB1, и затем обнаруживают сигнал обнаружения, передаваемый посредством UE1 1121, основываясь на полученной синхронизации.
[175] Кластер обнаружения D2D может иметь только одну соту. В этом случае, сота выбирается в качестве представительной соты кластера. Эта конфигурация может применяться тогда, когда является необязательной операция обнаружения D2D между сотами. Альтернативно, даже если представительная сота не сконфигурирована отдельно, конфигурация может применяться тогда, когда является возможным обнаружение D2D между сотами. Например, конфигурация может применяться, когда очень точно выполняется синхронизация между сотами, и сигналы, передаваемые от нескольких сот, принимаются почти одновременно, так как является малым радиус соты.
[176] Информация о представительной соте в кластере D2D может доставляться от eNB на UE как часть параметров для операции D2D. Например, eNB может обозначить список сот, принадлежащих одному и тому же кластеру, и ID (идентификатор) представительной соты кластера. Если конкретное UE подключено к одной соте, включенной в список сот, UE может синхронизировать сигнал обнаружения с сигналом представительной соты кластера, к которому принадлежит сота.
[177] Сигнал обнаружения может синхронизироваться с сигналом синхронизации (или опорным сигналом синхронизации), который передает представительная сота. Сигналом синхронизации, например, может быть первичный сигнал синхронизации или вторичный сигнал синхронизации системы LTE 3GPP. Или сигналом синхронизации может быть характерный для соты опорный сигнал (CRS) представительной соты. Если CRS представительной соты используется в качестве сигнала синхронизации, операция синхронизации может выполняться точно. Например, может выполняться операция проверки расположения сигнала синхронизации. В некоторых случаях, сигналом синхронизации может быть опорный сигнал слежения, который передается в том же расположении, что и CRS в одном подкадре и используется для выполнения временного/частотного отслеживания для соответствующей соты. Если представительная сота использует новый тип несущей (NCT), который значительно уменьшает количество случаев передачи CRS по сравнению с существующим типом несущей, опорный сигнал слежения может использоваться в качестве сигнала синхронизации. В дополнение к вышеупомянутым сигналам может использоваться сигнал, такой как опорный сигнал с информацией о состоянии канала (CSI-RS). Альтернативно, может быть разработан отдельный формат сигнала для синхронизации сигнала обнаружения.
[178] UE, которое находится в режиме ожидания, может работать следующим образом. UE, не имеющее трафик для выполнения связи с обслуживающей сотой, работает в режиме ожидания без подключения к конкретной соте. Даже если UE находится в режиме ожидания, UE в некоторых случаях необходимо выполнять операцию обнаружения D2D. Следовательно, чтобы применить настоящее изобретение, необходим эталон, формирующий основу определения представительной соты кластера D2D. Сначала UE в режиме ожидания выбирает соту, служащую в качестве эталона. После этого, UE может синхронизировать сигнал обнаружения D2D с представительной сотой кластера D2D, к которому принадлежит опорная сота. В этом случае, эталоном может быть сота, имеющая наивысший RSRP или RSRQ, в котором является наилучшим качество сигнала CRS. Альтернативно, эталоном может быть сота, от которой UE в режиме ожидания принимает сигнал поискового вызова. Альтернативно, UE в режиме ожидания может принимать список представительных сот кластера D2D из сети, выбирать соту, имеющую наибольший RSRP или RSRQ в качестве соты, обеспечивающей наилучшее качество сигнала из числа представительных сот кластера D2D, и синхронизировать их с сигналом обнаружения.
[179] Чтобы выполнять операцию обнаружения D2D с UE, которое находится вне зоны покрытия, конкретное UE внутри зоны покрытия может передавать на UE вне зоны покрытия информацию о границе в подкадре D2D, которую получило конкретное UE. Например, конкретное UE передает предварительно определенный сигнал в конкретный момент времени, определенный на основе границы полученного подкадра кластера. UE вне зоны покрытия может обнаруживать сигнал, тем самым получая синхронизацию сигнала обнаружения D2D. Если множество кластеров обнаружения D2D перекрывают друг друга, обслуживающая сота может дополнительно назначить кластер, для которого должна передаваться информация о границе. В данном случае, UE, находящиеся вне зоны покрытия, означает то, что UE передачи находится вне зоны покрытия. Альтернативно, UE, находящееся вне зоны покрытия, может означать, что UE передачи находится внутри зоны покрытия, и UE приема находится вне зоны покрытия. Конечно, используя этот же принцип, конкретное UE может выполнять связь D2D с UE, которое находится вне зоны покрытия опорной соты синхронизации и подключено в другой соте.
[180] Фиг. 13 иллюстрирует ресурсы во временной области в случае, когда представительная сота идентична обслуживающей соте. Ниже в данном документе приводится описание ресурсов во временной области, которые конкретное UE использует для операции обнаружения D2D, когда представительная сота и обслуживающая сота идентичны друг другу, с ссылкой на фиг. 13.
[181] Как показано на фиг. 13, момент времени, при котором начинается подкадр, используемый для операции обнаружения D2D, представляет собой момент времени, полученный применением предварительно определенного смещения к моменту времени, при котором обнаруживается граница подкадра представительной соты кластера обнаружения D2D. Ниже в данном документе граница подкадра представительной соты кластера обнаружения D2D упоминается как граница подкадра 1307 кластера. На фиг. 13 предполагается, что применяется значение смещения, так что граница подкадра 1309 обнаружения D2D, располагается перед границей подкадра 1307 кластера. Альтернативно, может применяться значение смещения, так что граница подкадра 1309 обнаружения D2D располагается после границы подкадра 1307 кластера. Альтернативно, значением смещения может быть 0. В этом случае, моментом времени, при котором обнаруживается граница подкадра 1307 кластера, может быть граница подкадра 1309 обнаружения D2D.
[182] Передача радиокадра восходящей линии связи с UE может начинаться за некоторое время до начальной точки соответствующего радиокадра нисходящей линии связи на UE. Значение, соответствующее некоторому времени, упоминается как значение временного опережения. Обычно, UE работает посредством применения некоторого временного опережения к сигналу передачи восходящей линии связи. В результате, граница подкадра восходящей линии связи предшествует границе соответствующего подкадра нисходящей линии связи.
[183] После того как UE передаст сигнал на обслуживающую соту в подкадре m-1 1301 восходящей линии связи, UE переключает работу приемопередающей схемы, чтобы выполнять обнаружение D2D в подкадре m 1309. Посредством последовательности операция, описанных выше, UE определяет границу подкадра 1309 обнаружения D2D в подкадре m и выполняет операцию обнаружения D2D. После этого UE переключает работу приемопередающей схемы на выполнение передачи сигнала на eNB в подкадре m+1 (1305). В данном случае предполагается, что переключение работы приемопередающей схемы занимает время, соответствующее половине OFDM-символа.
[184] Вследствие времени, занимаемого переключением работы приемопередающей схемы и временного опережения для передачи сигнала на обслуживающую соту, некоторые OFDM-символы подкадра могут не использоваться для обнаружения D2D. Как показано на фиг. 13, OFDM-символ #13, который является последним символом подкадра m 1309, может не использоваться для обнаружения D2D.
[185] Фиг. 14 иллюстрирует ресурсы во временной области в случае, когда представительная сота отличается от обслуживающей соты. Как показано на фиг. 14, граница подкадра кластера отличается от границы подкадра обслуживающей соты.
[186] В данном случае, даже если UE работает, и значение временного опережения применяется к сигналу передачи восходящей линии связи, как показано на фиг. 14, уменьшается количество OFDM-символов, используемых для операции обнаружения D2D в подкадре m 1409. Как показано на фиг. 14, OFDM-символы #0-#9 подкадра m 1409 являются используемыми для операции обнаружения D2D, и (иероглиф) другие OFDM-символы #10-#13 этого подкадра используются для принятия мер в отношении несовпадения границ между подкадрами представительной соты кластера и обслуживающей соты.
[187] Если представительная сота отличается от обслуживающей соты, как описано выше, разные количества доступных OFDM-символов подкадра для передачи и приема сигнала обнаружения D2D могут конфигурироваться для поддержки синхронизации сигнала обнаружения с представительной сотой. Например, множество конфигураций может быть определено для подкадра обнаружения D2D, и разное количество доступных OFDM-символов для передачи и приема сигнала обнаружения D2D может устанавливаться для каждой конфигурации. eNB может сигнализировать UE конфигурацию подкадра обнаружения D2D, подлежащую использованию. Если множество кластеров D2D перекрывают друг друга, eNB может сигнализировать UE конкретную конфигурацию подкадра обнаружения D2D, которая синхронизируется с сигналом представительной соты. Конфигурация подкадра обнаружения D2D может передаваться на UE в качестве части информации о конфигурации параметров. Временная позиция (например, период или значение смещения), при которой появляется каждый подкадр обнаружения D2D, также может доставляться на UE в качестве части информации о конфигурации параметров.
[188] Фиг. 15 иллюстрирует ресурсы во временной области в случае, когда существует большая ошибка между представительной сотой и обслуживающей сотой. Как показано на фиг. 15, существует большая разница между границей подкадра кластера и границей подкадра обслуживающей соты по сравнению со случаем на фиг. 14. Чтобы использовать подкадр m+1 1505 для передачи и приема сигнала с обслуживающей сотой, дополнительно уменьшается количество OFDM-символов, используемых для операции обнаружения D2D в подкадре m 1509. Как показано на фиг. 15, только OFDM-символы #0-#2 подкадра m 1509 являются используемыми для операции обнаружения D2D, и другие OFDM-символы #3-#13 подкадра используются для принятия мер по поводу несовпадения границ между представительной сотой кластера и обслуживающей сотой.
[189] В данном случае, предпочтительно, что UE выполняет операцию обнаружения D2D в подкадре m+1 1505 без передачи сигнала на обслуживающую соту. Посредством этого, может увеличиваться количество символов, доступных для операции обнаружения D2D.
[190] Когда часть подкадра распределяется операции D2D, как описано выше, может ограничиваться передача и прием сигнала между UE и eNB. В вариантах осуществления, изображенных на фиг. 13 и 14, ограничивается использование подкадра m. В варианте осуществления, показанном на фиг. 15, ограничивается использование подкадра m и подкадра m+1. Если eNB способна распознавать временную зависимость между подкадрами соответствующих UE, eNB может надлежащим образом различать подкадр, в котором выполняется операция обнаружения D2D, и соседний подкадр. Однако, может быть трудным для конкретной обслуживающей соты распознавать различие между границей подкадра кластера и границей подкадра обслуживающей соты, наблюдаемой конкретным UE. Следовательно, чтобы гарантировать надежную работу, каждая сота может выдавать инструкцию UE, выполняющему операцию обнаружения D2D, не использовать подкадр, в котором выполняется операция обнаружения D2D, и соседние подкадры для выполнения связи с обслуживающей сотой. В частности, подкадры, которые не используются для связи с обслуживающей сотой, могут ограничиваться подкадрами восходящей линии связи, в которых обычно происходит связь D2D. В данном случае, подкадры, являющиеся соседними для подкадра, в котором выполняется операция обнаружения D2D, могут ссылаться на некоторые подкадры до, после, или до и после подкадра, в котором выполняется операция обнаружения D2D.
[191] Каждая сота может сигнализировать UE, ограничивается ли связь с обслуживающей сотой в подкадрах, являющихся соседними конкретному подкадру обнаружения D2D, и также может сигнализировать, если имеется ограничение, подкадры, которые ограничиваются. Кроме того, если UE распознает, что связь с обслуживающей сотой ограничивается в конкретном подкадре, UE может выполнять надлежащую операцию, чтобы реагировать на это ограничение. Например, если HARQ-ACK (гибридный автоматический запрос на повторение - подтверждение приема) для PDSCH, передаваемого с обслуживающей соты, необходимо передавать в подкадре, имеющем вышеупомянутое ограничение, UE может действовать, перемещая HARQ-ACK в другой подкадр, который должен подвергаться ограничению.
[192] Чтобы способствовать тому, чтобы обслуживающая сота работала как указано выше, UE может измерить состояние синхронизации текущего сигнала обнаружения D2D и предоставить отчет о нем обслуживающей соте. Например, UE может измерить и предоставить отчет о различии между границей подкадра нисходящей линии связи обслуживающей соты и границей подкадра нисходящей линии связи кластера. В данном случае, подкадр нисходящей линии связи кластера означает подкадр нисходящей линии связи представительной соты кластера. В частности, различие в радиокадре, подкадре или OFDM-символе может измеряться и предоставляться в отчете. Альтернативно, UE может предоставить отчет о различии между границей подкадра восходящей линии связи для передачи на обслуживающую соту и границей подкадра обнаружения D2D. Может устанавливаться правило, так что такое предоставление отчета о состоянии выполняется тогда, когда степень несовпадения между границами двух подкадров выше или равна некоторому уровню. Например, если степень несовпадения между границами двух подкадров выше или равна некоторому уровню, может предоставляться отчет о различии между границей подкадра восходящей линии связи для передачи на обслуживающую соту и границей подкадра обнаружения D2D в единицах радиокадров, подкадров или OFDM-символов. В некоторых случаях, UE может просто предоставить отчет о том, является ли степень несовпадения между границами двух подкадров выше или равна некоторому уровню.
[193] Чтобы гарантировать более точную синхронизацию, обслуживающая сота может предоставлять дополнительную информацию о ID представительной соты кластера обнаружения D2D. В частности, если синхронизация сигнала обнаружения D2D получается с использованием CRS, обслуживающая сота может предоставить информацию о CRS о представительной соте в качестве дополнительной информации. Дополнительная информация может включать в себя количество антенных портов для CRS представительной соты, расположение подкадра, в котором передается CRS представительной соты, информацию, указывающую, использует ли представительная сота NCT, посредством которого уменьшается передача CRS в частотно/временной области, или информацию о полосе частот, в которой передается CRS представительной соты. Информация о расположении подкадра, в котором передается CRS представительной соты, может, например, представлять собой информацию о конфигурации подкадра MBSFN (одночастотной сети многоадресной/широковещательной передачи) представительной соты. Часть дополнительной информации может опускаться, чтобы уменьшить служебную информацию сигнализации. Если часть информации опускается, опущенная часть может рассматриваться как являющаяся такой же, что параметры обслуживающей соты. Если сигнал, такой как CSI-RS, который передается периодически, используется в качестве опорного сигнала для синхронизации, обслуживающая сота может доставлять информацию о периодичности передачи или временной позиции сигнала.
[194] Если представительная сота кластера D2D представляет собой соседнюю соту, не обслуживающую соту, качество сигнала может быть не такое хорошее, как качество сигнала обслуживающей соты. В этом случае, соседняя сота может уменьшить мощность передачи по конкретному ресурсу, так что UE будет более точно принимать сигнал представительной соты кластера D2D. Операция уменьшения мощности передачи по конкретному ресурсу включает в себя операцию снижения установления мощности передачи до 0 по этому ресурсу. Следовательно, могут быть уменьшены помехи, которые соседняя сота налагает на сигнал представительной соты кластера D2D, занимающий конкретный ресурс.
[195] Фиг. 16 представляет собой чертеж, иллюстрирующий работу соседней соты, управляющей мощностью передачи по конкретному ресурсу для выполнения синхронизации.
[196] Как показано на фиг. 16, eNB2 1620 служит в качестве eNB обслуживающей соты для UE 1630, и eNB1 1610 служит в качестве eNB представительной соты. Предполагается, что UE 1630 синхронизируется с сигналом, передаваемым с eNB1 1610 для выполнения операции обнаружения. В данном случае, чтобы защитить сигнал представительной соты кластера D2D во втором периоде времени, eNB2 1620 не передает сигнал по ресурсу, соответствующему второму периоду времени.
[197] С этой целью, представительная сота может сигнализировать по межсотовой ретрансляционной линии временной/частотный ресурс, подлежащий использованию для передачи опорного сигнала синхронизации для сигнала обнаружения. Кроме того, сота может сигнализировать частотно/временную область, в которой должна выполняться передача с низкой мощностью, чтобы защитить опорный сигнал синхронизации для сигнала обнаружения. В варианте осуществления, изображенном на фиг. 16, UE 1630 предпочтительно обнаруживает сигнал eNB1 1610 только во втором периоде времени, который является областью без передачи eNB2 1620 для синхронизации сигнала обнаружения, таким образом исключая помехи от eNB2 1620.
[198] Каждая обслуживающая сота может доставлять информацию о конкретном ресурсе на UE 1630. Информация о конкретном ресурсе указывает ресурс, на котором защищается опорный сигнал синхронизации. При получении информации UE 1630 может обнаруживать опорный сигнал для синхронизации сигнала обнаружения только на указанном ресурсе. Следовательно, составляющая сигнала, подвергаемая сильной помехе, может исключаться заранее. Если UE не принимает информацию, UE может использовать только составляющую сигнала конкретного ресурса для обнаружения сигнала, используемого в качестве эталона для синхронизации сигнала обнаружения. Эта операция является эффективной, когда опорный сигнал синхронизации передается периодически. Например, если сигнал синхронизации представительной соты кластера обнаружения D2D используется в качестве опорного сигнала, сигнал синхронизации представительной соты не обнаруживается во всей временной области, но может обнаруживаться только в части временной области, предшествующей подкадру, в котором выполняется операция обнаружения D2D. В этом случае, другие соты могут уменьшить мощность передачи частотной области, в которой сигнал синхронизации представительной соты передается в части временной области.
[199] Подобная операция может выполняться, если CRS используется в качестве опорного сигнала синхронизации для сигнала обнаружения. В этом случае, UE может принимать информацию о конкретной частотной области от обслуживающей соты. Информация о конкретной частотной области указывает частотную область, в которой защищается CRS представительной соты. Следовательно, UE может распознавать, является ли предпочтительной попытка обнаружения CRS представительной соты только в некоторой частотной области.
[200] Ниже в данном документе приводится описание операции синхронизации в частотной области.
[201] Сигнал представительной соты кластера D2D, описанный выше, может использоваться в качестве опорного сигнала не только для временной синхронизации, но также для частотной синхронизации. Каждое UE выполняет процессы частотной области, такие как модуляция/демодуляция, основываясь на сигнале, генерируемом его генератором. В этом случае, сигнал, генерируемый генератором каждого UE, может иметь некоторую ошибку. Таким образом, если UE передает сигналы обнаружения без отдельного эталона для частотной синхронизации, сигналы могут мультиплексироваться с частотной синхронизацией, распределенной из-за ошибок в генераторах UE, и, как результат, ухудшаются рабочие характеристики передачи и приема. Чтобы решить данный вопрос, сигнал представительной соты кластера D2D, описанный выше, может использоваться в качестве эталона для частотной синхронизации сигнала обнаружения. В результате, сигналы обнаружения, передаваемые с соответствующих UE, синхронизируются в частотной области, и, таким образом, могут быть улучшены рабочие характеристики передачи и приема. Т.е. UE для передачи сигнала обнаружения распознает опорную частоту из сигнала представительной соты кластера D2D и генерирует и передает сигнал обнаружения на основе распознавания.
[202] Сгенерированный сигнал обнаружения может быть не синхронизированным по частоте с сигналами, которые UE передает на обслуживающую соту. В частности, если обслуживающая сота не является представительной сотой кластера D2D, сгенерированный сигнал обнаружения может быть не синхронизирован по частоте с другими сигналами UE. В результате, если обслуживающая сота для конкретного UE отличается от представительной соты кластера D2D, UE может быть не способно одновременно передавать сигнал D2D и сигнал для eNB обслуживающей соты. В этом случае, только один из двух сигналов может передаваться в соответствии с предустановленным правилом. Например, если сигнал на eNB содержит важную информацию управления, сначала сигнал может передаваться на eNB. Альтернативно, чтобы предотвратить обнаружение отсутствующего сигнала многочисленными UE, предпринимающими попытку приема сигнала D2D, сначала может передаваться сигнал D2D. Однако, если ошибка между частотой сигнала, передаваемого на eNB обслуживающей соты, и частотой сигнала D2D меньше или равна некоторому уровню, может быть возможным передача UE двух сигналов одновременно.
[203] Чтобы гарантировать работу так, как указано выше, UE может измерять ошибку между частотой сигнала обслуживающей соты и частотой сигнала представительной соты кластера D2D и может предоставлять отчет о ней eNB обслуживающей соты. eNB может выполнять планирование с ссылкой на отчет. Если сигнал на каждый eNB и сигнал D2D передаются в соответствии с сигналом обслуживающей соты и сигналом представительной соты кластера D2D, предоставление отчета может быть упрощено в виде предоставления отчета о том, являются ли два типа сигналов передаваемыми одновременно. Например, предоставление отчета может быть упрощено до передачи 1-битовой информации.
[204] Между тем, UE для приема сигнала обнаружения может принимать сигналы обнаружения, передаваемые с соответствующих UE, предполагая, что сигналы обнаружения синхронизированы с конкретным сигналом представительной соты кластера D2D, используемой в качестве эталона для частотной синхронизации со смещением частоты в пределах некоторой ошибки. Т.е. может предполагаться квази-совместное расположение с точки зрения допплеровского сдвига частоты и/или разброса по допплеровской частоте.
[205] Если UE необходимо выполнять связь D2D вне зоны покрытия eNB, сигнал представительной соты кластера D2D может не приниматься должным образом. Следовательно, необходимо отдельно установить эталон для временной/частотной синхронизации. В этом случае, UE внутри зоны покрытия eNB может принимать инструкцию от eNB и может передавать предварительно определенный опорный сигнал на UE вне зоны покрытия eNB. Альтернативно, UE вне зоны покрытия eNB может передавать предварительно определенный опорный сигнал в соответствии с предустановленным правилом. UE, которое находится вне зоны покрытия eNB и принимает опорный сигнал от UE внутри или вне зоны покрытия eNB, может использовать опорную соту в качестве эталона для временной/частотной синхронизации. Конечно, используя этот же принцип, UE может выполнять связь D2D с другим UE, которое находится вне зоны покрытия eNB для UE и подключено к другой соте.
[206] Использование сигнала представительной соты кластера D2D в качестве эталона для временной и/или частотной синхронизации, как описано выше, также может применяться тогда, когда UE выполняет связь D2D, в которой UE непосредственно передает и принимает данные. Однако, если время приема сигнала используется в качестве эталона для D2D, даже когда задается большое временное опережение, или синхронизация между сотами не получается, как показано на фиг. 14 или 15, многочисленные OFDM-символы могут быть потеряны, и могут ухудшаться рабочие характеристики связи D2D. В этом случае, UE, выполняющее связь D2D, может конфигурировать временную синхронизацию, т.е. границу подкадра, и частотную синхронизацию отдельно. Временная синхронизация, а именно граница подкадра, может извлекаться из синхронизации подкадра нисходящей линии связи или подкадра восходящей линии связи, используемого для связи с eNB, применяя максимально возможное количество символов для связи D2D. Чтобы предотвратить ухудшение рабочих характеристик, являющееся результатом частотной несинхронизации между UE, сигнал представительной соты кластера D2D может использоваться в качестве эталона для частотной синхронизации. Аналогично, UE, выполняющее операцию обнаружения D2D, может использовать сигнал обслуживающей соты в качестве эталона для временной синхронизации, в тоже время используя сигнал представительной соты кластера D2D в качестве эталона для частотной синхронизации. Этот способ может быть полезным, когда не могут применяться многочисленные OFDM-символы, так как соты не являются синхронизированными в достаточной степени. Операция может обратным образом применяться для частоты и времени.
[207] Когда конкретное UE определяет конкретную соту в качестве эталона для синхронизации, чтобы выполнять операцию D2D, множество сот может использоваться в качестве эталона. Тем не менее в этом случае, может применяться принцип настоящего изобретения, описанный выше.
[208] UE делит последовательность временных/частотных ресурсов, по которым выполняется операция D2D, или атрибуты сигнала D2D, передаваемого и принимаемого UE, на множество групп. UE может использовать другую соту для каждой разделенной группы в качестве эталона для временной и/или частотной синхронизации. В этом случае, UE, подключенное к многочисленным сотам для передачи и приема сигналов, может использовать надлежащую соту в качестве эталона для синхронизации в соответствии с ситуацией для выполнения операции D2D.
[209] Фиг. 17 представляет собой чертеж, иллюстрирующий способ приема информации о синхронизации для прямой связи между UE согласно одному варианту осуществления настоящего изобретения.
[210] Ниже в данном документе приводится описание способа деления всех временных/частотных ресурсов на множество групп и использования множества сот в качестве эталона для синхронизации, с ссылкой на фиг. 17.
[211] Сначала UE делит все временные/частотные ресурсы, используемые для операции D2D, на множество групп. После этого, ID соты, подлежащей использованию в качестве эталона для временной и/или частотной синхронизации, может отдельно обозначаться в каждом разделе. Эта операция является полезной в том, что оптимизированная сота используется в качестве эталона для синхронизации в каждом разделе. Оптимизированной сотой может быть, например, сота, работающая в качестве обслуживающей соты для многочисленных UE, которые передают сигналы в разделе.
[212] Как показано на фиг. 17, UE использует разные соты в качестве эталона для синхронизации в разделе #1 1711 временных/частотных ресурсов и раздел #2 1712 ресурсов. В этом случае, использование конкретной соты в качестве эталона для синхронизации в конкретном разделе ресурсов означает, что может предполагаться следующая ситуация, ввиду UE приема, принимающего сигнал D2D. UE передачи, которые передают сигналы D2D в соответствующей области ресурсов, находятся во временной/частотной синхронизации с соответствующей сотой в пределах некоторого диапазона ошибки, и, поэтому, UE приема может предполагать на основе временной/частотной синхронизации, полученной от соты, что сигналы D2D, передаваемые с соответствующих UE передачи, принимаются в пределах некоторого диапазона ошибки.
[213] eNB может предварительно доставлять на UE по меньшей мере одну из информации о разделе ресурсов D2D и информации о функциональной связи между каждым разделом ресурсов и ID соты, используемым в качестве эталона для синхронизации в качестве части информации о конфигурации.
[214] Аналогично, все сигналы D2D могут делится на множество групп.
[215] Фиг. 18 представляет собой чертеж, иллюстрирующий способ приема информации о синхронизации для прямой связи между UE согласно другому варианту осуществления настоящего изобретения. Ниже в данном документе приводится описание деления всех сигналов D2D на множество групп и отдельно обозначения ID соты, используемой в качестве эталона для временной и/или частотной синхронизации для каждой группы, с ссылкой на фиг. 18.
[216] UE может делить все сигналы D2D на множество групп в соответствии с конфигурацией параметров, которые должны быть предварительно определены для приема сигналов D2D, и отдельно обозначать ID соты, используемого в качестве эталона для временной и/или частотной синхронизации для каждой группы. Параметры, которые необходимо предварительно определить для приема сигналов D2D, могут включать в себя, например, последовательность опорного сигнала демодуляции (DM-RS) или последовательность преамбулы. В данном документе, опорный сигнал демодуляции представляет собой сигнал, используемый в качестве эталона для демодуляции информации, такой как ID UE, передающего сигнал D2D. Опорный сигнал демодуляции представляет сигнал, расположение и свойства передачи которого предварительно известны для UE приема. Ниже в данном документе опорный сигнал демодуляции упоминается как DM-RS, и последовательность опорного сигнала демодуляции упоминается как последовательность DM-RS. Преамбула представляет собой сигнал, передаваемый для того, чтобы предоставить возможность UE приема получить точную временную/частотную синхронизацию перед тем, как будет передаваться сигнал D2D, содержащий различные виды информации. Преамбула представляет сигнал, расположение и свойства передачи которого предварительно известны для UE приема.
[217] Если UE принимает сигнал обнаружения, имеющий конкретный параметр, UE необходимо работать с использованием временной/частотной синхронизацией, полученной от опорной соты синхронизации, функционально связанной с параметром. Альтернативно, разные опорные соты синхронизации могут назначаться сигналу обнаружения D2D и сигналу связи D2D. Когда принимается сигнал обнаружения D2D, может применяться временная/частотная синхронизация, полученная от соты, функционально связанной с сигналом обнаружения D2D. Альтернативно, когда принимается сигнал связи D2D, может применяться временная/частотная синхронизация, полученная от соты, функционально связанной с сигналом обнаружения D2D.
[218] Как показано на фиг. 18, UE 1801 использует разные соты для последовательности #1 1811 преамбулы и последовательности #2 (1812) преамбулы в качестве эталона синхронизации. В данном случае использование конкретной соты в качестве эталона синхронизации для конкретного сигнала D2D означает, что UE приема, принимающее сигнал D2D, может предположить следующую ситуацию. Так как UE передачи, передающие сигналы D2D в соответствующей области ресурсов, находятся во временной/частотной синхронизации с соответствующей сотой с некоторым диапазоном ошибки, UE приема может предположить, основываясь на временной/частотной синхронизации, полученной от соты и/или из функционально связанной преамбулы, что сигналы D2D, передаваемые с UE передачи, принимаются в пределах некоторого диапазона ошибки.
[219] На фиг. 18 предполагается, что сота, подлежащая использованию в качестве эталона синхронизации, сконфигурирована по-другому в соответствии со случайным значением для генерирования последовательности преамбулы, расположенной в начальной части сигнала D2D. Также предполагается, что последовательность #1 1811 преамбулы функционально связана с ID #1 соты, и последовательность #2 1812 преамбулы функционально связана с ID #2 соты.
[220] Когда UE приема обнаруживает сигнал D2D, который использует последовательность #1 1811 преамбулы, UE приема предпринимает попытку обнаружения сигнала, основываясь на временной/частотной синхронизации, полученной от ID #1 соты. Когда UE приема обнаруживает сигнал D2D, который использует последовательность #2 1812 преамбулы, UE приема предпринимает попытку обнаружения сигнала, основываясь на временной/частотной синхронизации, полученной от ID #2 соты.
[221] Аналогично, когда UE передачи передает сигнал D2D, который использует последовательность #1 1811 преамбулы, UE передачи передает сигнал, основываясь на временной/частотной синхронизации, полученной от ID #1 соты. Когда UE передачи передает сигнал D2D, который использует последовательность #2 1812 преамбулы, UE передачи передает сигнал, основываясь на временной/частотной синхронизации, полученной от ID #2 соты.
[222] Если UE приема способно получать синхронизацию просто посредством непосредственного обнаружения преамбулы, может опускаться операция получения синхронизации от каждой опорной соты. В этом случае, если UE приема обнаруживает сигнал D2D, который использует последовательность #1 1811 преамбулы, UE приема немедленно предпринимает попытку обнаружения сигнала по функционально связанному временному/частотному ресурсу, основываясь на временной/частотной синхронизации, полученной из последовательности #1 1811 преамбулы. Если UE приема обнаруживает сигнал D2D, который использует последовательность #2 1812 преамбулы, UE приема немедленно предпринимает попытку обнаружения сигнала функционально связанного частотного/временного ресурса, основываясь на временной/частотной синхронизации, полученной из последовательности #2 1812 преамбулы.
[223] Кроме того, операция, описанная выше, может выполняться посредством зависимости функциональной связи между последовательностью DM-RS и ID опорной соты синхронизации. Если UE приема обнаруживает сигнал D2D, который использует последовательность #1 DM-RS, UE приема предпринимает попытку обнаружения сигнала, основываясь на временной/частотной синхронизации, полученной от ID #1 соты. Если UE приема обнаруживает сигнал D2D, который использует последовательность #2 DM-RS, UE приема предпринимает попытку обнаружения сигнала, основываясь на временной/частотной синхронизации, полученной от ID #2 соты. Аналогично, если UE передачи передает сигнал D2D, который использует последовательность #1 DM-RS, UE передачи передает сигнал, основываясь на временной/частотной синхронизации, полученной от ID #1 соты. Если UE передачи передает сигнал D2D, который использует последовательность #2 DM-RS, UE передачи передает сигнал, основываясь на временной/частотной синхронизации, полученной от ID #2 соты.
[224] Кроме того, этот же ID соты, используемый в качестве эталона синхронизации, может использоваться для выполнения скремблирования сообщения обнаружения.
[225] eNB может предварительно доставлять на UE явную информацию о функциональной связи между параметром сигнала D2D и ID опорной соты синхронизации, используемого в качестве эталона для синхронизации в качестве части относящейся к D2D информации конфигурации. Т.е. eNB может сигнализировать на UE ID соты, подлежащий использованию в качестве эталона для синхронизации, когда сигнал D2D передается и принимается с использованием некоторого параметра. Альтернативно, может использоваться неявная зависимость функциональной связи. В этом случае, если конкретный параметр сигнала сгенерирован из конкретного ID соты, сота, имеющая такой же ID, может использоваться в качестве эталона для временной/частотной синхронизации.
[226] Между тем, преамбула, показанная на фиг. 18, предназначена для временной/частотной синхронизации между объектом передачи и объектом приема. Следовательно, первичный сигнал синхронизации (PSS) и/или вторичный сигнал синхронизации (SSS), который использовался для синхронизации между существующим eNB и существующим UE, может передаваться в виде конкретного вида такой преамбулы. Кроме того, PSS и/или SSS может быть изменен в надлежащий вид в соответствии с ситуацией D2D. Например, так как ожидается, что передача с UE будет использовать более низкую мощность передачи, чем передача с eNB, PSS и/или SSS могут неоднократно передаваться несколько раз для доставки достаточной энергии.
[227] Могут быть объединены варианты осуществления, изображенные на фиг. 17 и 18. В конкретной частотной/временной области D2D, конкретная сота, функционально связанная с конкретным ID соты, может применяться в качестве эталона для временной/частотной синхронизации. Одновременно, последовательность DM-RS или последовательность преамбулы сигнала D2D может генерироваться с использованием параметра, который функционально связан явно или неявно с конкретным ID соты.
[228] Вышеописанный принцип также может быть применен, когда UE выполняет операцию D2D вне зоны покрытия. Когда операция D2D выполняется вне зоны покрытия, конкретное UE может передавать опорный сигнал временной/частотной синхронизации, и UE, принимающие сигнал, выполняют синхронизацию, основываясь на опорном сигнале синхронизации. Некоторые UE могут обнаруживать два или более опорных сигнала синхронизации. Кроме того, если сигналы D2D передаются и принимаются по разным временным/частотным ресурсам, может применяться временная/частотная синхронизация, полученная из опорного сигнала синхронизации, функционально связанного с каждым ресурсом. Альтернативно, если передаются и принимаются сигналы D2D разных параметров, может применяться временная/частотная синхронизация, полученная из опорного сигнала синхронизации, функционально связанного с каждым параметром. В частности, как изображено на фиг. 18, если существует неявная зависимость функциональной связи между ID соты для генерирования последовательности DM-RS или последовательности преамбулы сигнала D2D и ID соты для генерирования последовательности опорного сигнала синхронизации, передаваемого с конкретного UE, и сигнала D2D, передаваемого и принимаемого с использованием конкретного ID, UE может использовать временную/частотную синхронизацию, полученную из опорного сигнала синхронизации, сгенерированного на основе ID. В этом случае, последовательности опорных сигналов синхронизации, передаваемые с разных UE, должны отличаться друг от друга. Каждое UE передачи может стохастически выбирать, в пределах некоторой области, ID, подлежащий использованию при передаче опорного сигнала синхронизации.
[229] Может быть случай, когда конкретное UE выполняет операцию D2D с UE внутри зоны покрытия и одновременно с другим UE вне зоны покрытия. В этом случае, ID соты, используемой в качестве эталона для временной/частотной синхронизации, может определяться на основе атрибута раздела ресурса D2D или сигнала D2D. Альтернативно, атрибут опорного сигнала передачи конкретного UE может определяться для соответствующих атрибутов раздела ресурсов D2D или сигнала D2D. Например, конкретное UE может выполнять операцию D2D с UE внутри зоны покрытия в разделе 1 ресурсов D2D, используя конкретную соту в качестве эталона синхронизации. Кроме того, конкретное UE может выполнять операцию D2D с UE вне зоны покрытия в разделе 2 ресурсов, используя опорный сигнал в качестве эталона для синхронизации.
[230] При выполнении вышеупомянутой операции одна или несколько опорных сот синхронизации могут использоваться в качестве эталона для временной и/или частотной синхронизации в одном разделе временных/частотных ресурсов. Т.е. когда ряд сот хорошо синхронизирован во временной или частотной области, любая одна из сот может быть сконфигурирована в качестве эталона для синхронизации. Если соты хорошо синхронизированы во временной или частотной области, не может быть проблемы с синхронизацией для операции D2D, даже если любая одна из сот используется в качестве эталона для синхронизации.
[231] Фиг. 19 представляет собой чертеж, иллюстрирующий способ приема информации о синхронизации для прямой связи между UE, когда существует много опорных сот синхронизации, согласно одному варианту осуществления настоящего изобретения.
[232] eNB передает список из одной или нескольких сот, которые хорошо синхронизированы, в качестве возможных опорных сот синхронизации в каждом разделе временных/частотных ресурсов. UE, принимающее список сот, может выбрать наиболее подходящую соту из числа сот, включенных в список, выполняющих синхронизацию. Наиболее подходящей сотой, например, может быть сота, имеющая наибольшую мощность приема, или сота, имеющая наилучшее качество приема. Альтернативно, UE, принимающее список сот, может получить синхронизацию каждой соты в списке, и затем может выполнить синхронизацию для операции D2D со средним значением полученной синхронизации.
[233] Например, если eNB создает множество секторов посредством секторизации для формирования множества лучей передачи в разных направлениях и формирует независимую соту в каждом секторе, хорошо синхронизированными сотами могут быть соты, сгенерированные одним и тем же eNB. Это потому, что соты имеют один и тот же источник для временной/частотной синхронизации.
[234] Как показано на фиг. 19, eNB1 1910 формирует соту 1, соту 2 и соту 3, eNB2 1920 формирует соту 4, соту 5 и соту 6, eNB3 1930 формирует соту 7, соту 8 и соту 9. В этом случае, сеть передает на UE список опорных сот синхронизации для одного раздела временных/частотных ресурсов. Список опорных сот синхронизации включает в себя три соты, сформированные одним eNB.
[235] UE, принимающее опорную соту синхронизации, может выполнять синхронизацию для операции D2D, используя список. В частности, UE, принимающее список опорных сот синхронизации, может выбирать наиболее подходящую соту из числа сот, включенных в список, выполняющих синхронизацию. Альтернативно, UE, принимающее список сот, может синхронизироваться с сотами, включенными в список, и затем может получать среднее значение синхронизации для получения синхронизации для операции D2D.
[236] Даже если соты генерируются разными eNB, достаточная синхронизация может быть получена, если выполняется сетевая операция, основанная на межсотовой синхронизации. В этом случае, соты, сгенерированные разными eNB, также могут быть включены в список опорных сот синхронизации одного и того же раздела временных/частотных ресурсов. Сетевая операция, основанная на межсотовой синхронизации, например, может представлять собой операцию дуплекса с временным разделением (TDD), в которой выполняется, в основном, временная синхронизация, или операция координации помех, в которой координируется помехи по временным ресурсам.
[237] Если преамбула для временной/частотной синхронизации или DM-RS для демодуляции сигнала D2D передается в разделе ресурсов для передачи и приема сигнала D2D, как показано на фиг. 17 или 18, множество опорных сот синхронизации может применяться в одном разделе ресурсов, как описано выше. В этом случае, если определяется последовательность преамбулы или DM-RS, используя неявную зависимость функциональной связи, может быть неясным, какой ID соты использовать.
[238] В этом случае, одна сота может выбираться из числа опорных сот синхронизации в соответствии с предустановленным правилом и использовать ее в качестве ID соты для генерирования последовательности преамбулы или DM-RS. Сота может выбираться на основе того, является ли сота первой обозначенной сотой из числа обозначенных опорных сот синхронизации, или имеет ли сота наименьший или наибольший ID соты из числа ID соты, обозначенных в качестве опорных сот синхронизации.
[239] Если используется явный сигнал eNB, eNB может обозначать ID соты для использования для генерирования преамбулы или DM-RS в конкретном разделе ресурсов. Альтернативно, eNB может обозначать случайное значение для генерирования сигнала.
[240] Если обозначается множество опорных сот синхронизации, eNB может дополнительно обозначать ID по меньшей одной соты посредством дополнительной сигнализации, так что ID используется при генерировании преамбулы или DM-RS. Предпочтительно, что eNB может дополнительно обозначать ID по меньшей одной из опорных сот синхронизации. Когда обозначается только одна опорная сота синхронизации, ID опорной соты синхронизации может автоматически обозначаться, так что ID используется при генерировании преамбулы или DM-RS. Т.е. когда обозначается только одна опорная сота синхронизации, ID соты, обозначенный посредством eNB для генерирования преамбулы или DM-RS, может рассматриваться в качестве опорной соты синхронизации данного раздела ресурсов.
[241] Даже если преамбула для синхронизации D2D по временному/частотному ресурсу передается как показано на фиг. 18, в некоторых случаях процесс обнаружения преамбулы может опускаться. Если конкретное UE способно выполнять синхронизацию непосредственным измерением опорной соты синхронизации, имеющей ID соты, используемый при генерировании преамбулы, UE может немедленно принять участие в процессе передачи и приема сигнала D2D, опуская процесс обнаружения преамбулы. Например, если достаточное качество сигнала получено от опорной соты синхронизации, процесс обнаружения преамбулы может опускаться. В противном случае, UE может обнаруживать преамбулу, сгенерированную сначала с обозначенным ID соты, и затем может принимать сигнал D2D, основываясь на синхронизации, полученной посредством обнаружения преамбулы.
[242] Ниже в данном документе приводится описание случая, когда каждое UE применяет вариант осуществления настоящего изобретения, описанный выше, интерпретируя вариант осуществления с точки зрения отношения к обслуживающей соте.
[243] Когда имеется множество кластеров D2D, как показано на фиг. 17, существует множество разделов ресурсов обнаружения, назначенных каждому кластеру D2D. В данном документе раздел ресурсов обнаружения ссылается на раздел ресурсов, назначенный для операции обнаружения D2D. В этом случае, обслуживающая сота передает информацию о ID представительной соты, чтобы сигнализировать UE, принадлежащим ей, ID представительной соты кластера D2D, который использует каждый раздел ресурсов обнаружения. UE, принимающие информацию о ID представительной соты, извлекают параметры сигнала D2D, передаваемого в разделе ресурсов обнаружения. Например, параметры, используемые для генерирования последовательности DM-RS, последовательности преамбулы или скремблирующей последовательности сообщения обнаружения, извлекаются из ID представительной соты. В этом смысле, ID представительной соты в каждом разделе ресурсов обнаружения могут упоминаться как случайное значение генерирования сигнала. Конечно, все относящиеся параметры могут извлекаться из одного ID представительной соты (или одного случайного значения генерирования сигнала), или может обозначаться отдельно ID представительной соты (или случайное значение генерирования сигнала), подлежащее применению для генерирования каждого параметра.
[244] Между тем, обслуживающая сота может передавать на UE информацию о списке сот, используемых в качестве эталона для временной/частотной синхронизации в каждом разделе ресурсов обнаружения, чтобы информировать UE о списке. В этом случае, если обслуживающая сота включена в список, UE может передавать и принимать сигнал D2D, сгенерированный из ID представительной соты соответствующего раздела ресурсов, основываясь на временной/частотной синхронизации обслуживающей соты в разделе ресурсов. В данном случае, может упрощаться список сот, служащих в качестве эталона для временной/частотной синхронизации. Обслуживающая сота может просто сигнализировать на UE, может ли или нет обслуживающая сота использоваться в разделе ресурсов в качестве эталона для временной/частотной синхронизации.
[245] Когда обслуживающая сота передает список сот, сигнализация списка опорных сот временной/частотной синхронизации, передаваемого обслуживающей сотой, может принимать вид {ID представительной соты, включена ли обслуживающая сота в список опорных сот временной/частотной синхронизации, список ID соты, которые могут быть эталоном для временной/частотной синхронизации вместо обслуживающих сот} для конкретного раздела ресурсов обнаружения. ID представительной соты может быть заменено случайным значением для генерирования различных сигналов. Элемент, указывающий, включает ли список опорных сот временной/частотной синхронизации обслуживающую соту, может быть заменен элементом, указывающим, получена ли синхронизация посредством обслуживающей соты. Список ID соты, включенных в виде в качестве последнего элемента, может опускаться, чтобы уменьшить служебную информацию сигнализации.
[246] Если обслуживающая сота обозначается как сота, которая не используется в качестве эталона для синхронизации в разделе ресурсов, UE может получить синхронизацию посредством отдельного сигнала. Если обслуживающая сота сигнализирует ID соты, используемой в качестве эталона для синхронизации в разделе ресурсов, UE может получить синхронизацию посредством соты, имеющей ID. Если обслуживающая сота не сигнализирует ID соты, используемой в качестве эталона для синхронизации, UE может использовать ID представительной соты для непосредственного обнаружения последовательности DM-RS или последовательности преамбулы, и может получить синхронизацию, используя обнаруженную последовательность.
[247] Если соты, используемые в качестве эталона для синхронизации в конкретном разделе ресурсов, не включают в себя обслуживающую соту, это означает, что обслуживающая сота не синхронизирована с сотой, используемой в качестве эталона в разделе. В этом случае, обслуживающая сота может способствовать UE в получении синхронизации посредством опорной соты, которая не синхронизирована с обслуживающей сотой. В частности, обслуживающая сота может дополнительно передавать на UE информацию о степени ошибки синхронизации между опорной сотой синхронизации и обслуживающей сотой. UE, принимающее информацию, находит опорную соту синхронизации, которая не является обслуживающей сотой, в пределах степени ошибки, тем самым уменьшая время и расход заряда батареи, затрачиваемые на поиск синхронизации.
[248] Принцип настоящего изобретения, описанного выше, также может применяться к связи D2D, в которой UE, расположенные в разных сотах, передают и принимают трафик пользователя.
[249] Фиг. 20 представляет собой блок-схему, иллюстрирующую конфигурации устройств связи согласно одному варианту осуществления настоящего изобретения.
[250] Как показано на фиг. 20, система беспроводной связи включает в себя BS 2010 и UE 2020.
[251] На нисходящей линии связи передатчик может представлять собой часть BS 2010, и приемник может представлять собой часть UE 2020. На восходящей линии связи передатчик может представлять собой часть UE 2020, и приемник может представлять собой часть BS 2010. BS 2010 включает в себя процессор 2012, память 2014 и радиочастотный (RF) блок 2016. Процессор 2012 может быть выполнен с возможностью реализации предложенных процедур и/или способов настоящего изобретения. Память 2014 подсоединена к процессору 2012 для хранения различных видов информации, относящейся в работе процессора 2012. RF-блок 2016 подсоединен к процессору 2012 и выполнен с возможностью передачи и/или приема радиосигнала. UE 2020 включает в себя процессор 2022, память 2024 и RF-блок 2026. Процессор 2022 может быть выполнен с возможностью реализации предложенных процедур и/или способов настоящего изобретения. Память 2024 подсоединена к процессору 2022 для хранения различных видов информации, относящейся к работе процессора 2022. RF-блок 2016 подсоединен к процессору 2022 и выполнен с возможностью передачи и/или приема радиосигнала. BS 2010 и/или UE 2020 могут иметь единственную антенну или многочисленные антенны.
[252] В описанных выше вариантах осуществления элементы и признаки настоящего изобретения объединены в предварительно определенную форму. Элементы или признаки должны рассматриваться необязательными, если явно не указано иначе. Каждый из элементов или признаков может быть реализован без объединения с другими элементами или признаками. Кроме того, некоторые элементы и/или признаки могут быть объединены для конфигурирования варианта осуществления настоящего изобретения. Может меняться последовательность операций, описанных в вариантах осуществления настоящего изобретения. Некоторые элементы или признаки одного варианта осуществления также могут быть включены в другой вариант осуществления, или могут быть заменены соответствующими элементами или признаками из другого варианта осуществления. Очевидно, что некоторые пункты формулы изобретения, для которых взаимосвязь зависимости между ними не указана явно, могут быть объединены для конфигурирования варианта осуществления, или могут быть включены в новый пункт формулы изобретения посредством исправления после подачи данной заявки.
[253] В данном описании изобретения были описаны варианты осуществления, концентрирующие внимание на передаче и приеме между UE и BS. Эта взаимосвязь передачи и приема может быть расширена на передачу и прием сигнала между UE и ретранслятором, или между BS и ретранслятором аналогичным/подобным образом. В данном описании изобретения конкретная операция, описанная как выполняющаяся посредством BS, может выполняться в некоторых случаях узлом более высокого уровня. Т.е. очевидно, что различные операции, выполняемые для связи с UE в сети, составленной множеством сетевых узлов, включая BS, могут выполняться посредством BS или других сетевых узлов. Термин «BS» может быть заменен термином «стационарная станция», «узел B», «усовершенствованный узел B (eNode B или eNB)», «точка доступа (AP)» и т.д. Термин «терминал» может быть заменен термином «пользовательское оборудование (UE)», «мобильная станция (MS)», «мобильная абонентская станция (MSS)» и т.д.
[254] Варианты осуществления настоящего изобретения могут быть реализованы различными средствами, например, аппаратными, программно-аппаратными, программными средствами или их комбинацией. Когда они реализованы аппаратными средствами, способ согласно вариантам осуществления настоящего изобретения может быть воплощен в виде одной или нескольких специализированных интегральных схем (ASIC), одного или нескольких процессоров цифровой обработки сигналов (DSP), одного или нескольких устройств цифровой обработки сигналов (DSPD), одного или нескольких программируемых логических устройств (PLD), одной или нескольких программируемых вентильных матриц (FPGA), процессора, контроллера, микроконтроллера, микропроцессора и т.д.
[255] Когда они реализованы программно-аппаратными или программными средствами, вариант осуществления настоящего изобретения может быть воплощен в виде модуля, процедуры или функции, которые выполняют функции или операции, описанные выше. Программный код может храниться в блоке памяти и может исполняться процессором. Блок памяти располагается внутри или вне процессора и может передавать и принимать данные на и от процессора посредством различных известных средств.
[256] Настоящее изобретение может быть выполнено другими конкретными способами, в отличие от тех, которые изложены в данном документе, без отступления от сущности и существенных характеристик настоящего изобретения. Поэтому, вышеупомянутые варианты осуществления должны толковаться во всех аспектах как иллюстративные и не ограничительные. Объем изобретения должен определяться прилагаемой формулой изобретения и ее законными эквивалентами, и все изменения, происходящие со значением и диапазоном эквивалентности прилагаемой формулы изобретения, как предполагается, охватываются ей.
[Промышленная применимость]
[257] Варианты осуществления настоящего изобретения, описанные выше, применимы к различным системам мобильной связи.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРЕДАЧИ/ПРИЕМА СИГНАЛА СИНХРОНИЗАЦИИ ДЛЯ ПРЯМОЙ СВЯЗИ МЕЖДУ ТЕРМИНАЛАМИ В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2014 |
|
RU2617834C2 |
| СПОСОБ ОСУЩЕСТВЛЕНИЯ СВЯЗИ МЕЖДУ УСТРОЙСТВАМИ В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ И УСТРОЙСТВО ДЛЯ ЕГО ВЫПОЛНЕНИЯ | 2015 |
|
RU2656885C1 |
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ И СООТВЕТСТВУЮЩЕЕ УСТРОЙСТВО | 2014 |
|
RU2635545C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ВЫПОЛНЕНИЯ ПРОЦЕДУРЫ НАЧАЛЬНОГО ДОСТУПА В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2014 |
|
RU2612658C2 |
| СПОСОБ ПЕРЕДАЧИ СИГНАЛА СИНХРОНИЗАЦИИ ДЛЯ ПРЯМОГО ОБМЕНА ДАННЫМИ МЕЖДУ ТЕРМИНАЛАМИ В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ И УСТРОЙСТВО ДЛЯ ЭТОЙ ЦЕЛИ | 2015 |
|
RU2643803C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ И ПРИЕМА ВОСХОДЯЩЕЙ ЛИНИИ СВЯЗИ В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2018 |
|
RU2762242C2 |
| СПОСОБ ПРИЕМА ОПОРНОГО СИГНАЛА В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2713407C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БЕСПРОВОДНОЙ СВЯЗИ | 2014 |
|
RU2642354C2 |
| СЕТЕВАЯ АРХИТЕКТУРА, СПОСОБЫ И УСТРОЙСТВА ДЛЯ СЕТИ БЕСПРОВОДНОЙ СВЯЗИ | 2017 |
|
RU2693848C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНФИГУРИРОВАНИЯ И ОБНАРУЖЕНИЯ УСОВЕРШЕНСТВОВАННОГО НИСХОДЯЩЕГО КАНАЛА УПРАВЛЕНИЯ, УСОВЕРШЕНСТВОВАННОЙ БАЗОВОЙ СТАНЦИИ И ТЕРМИНАЛА | 2013 |
|
RU2602832C2 |
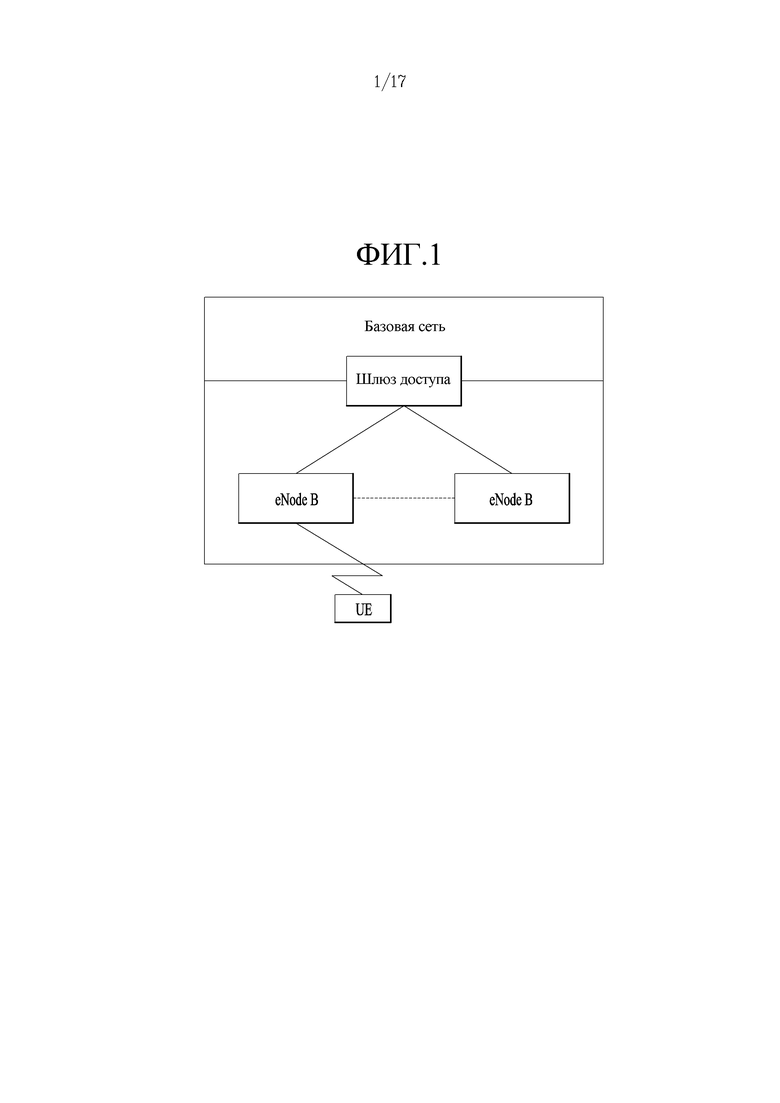
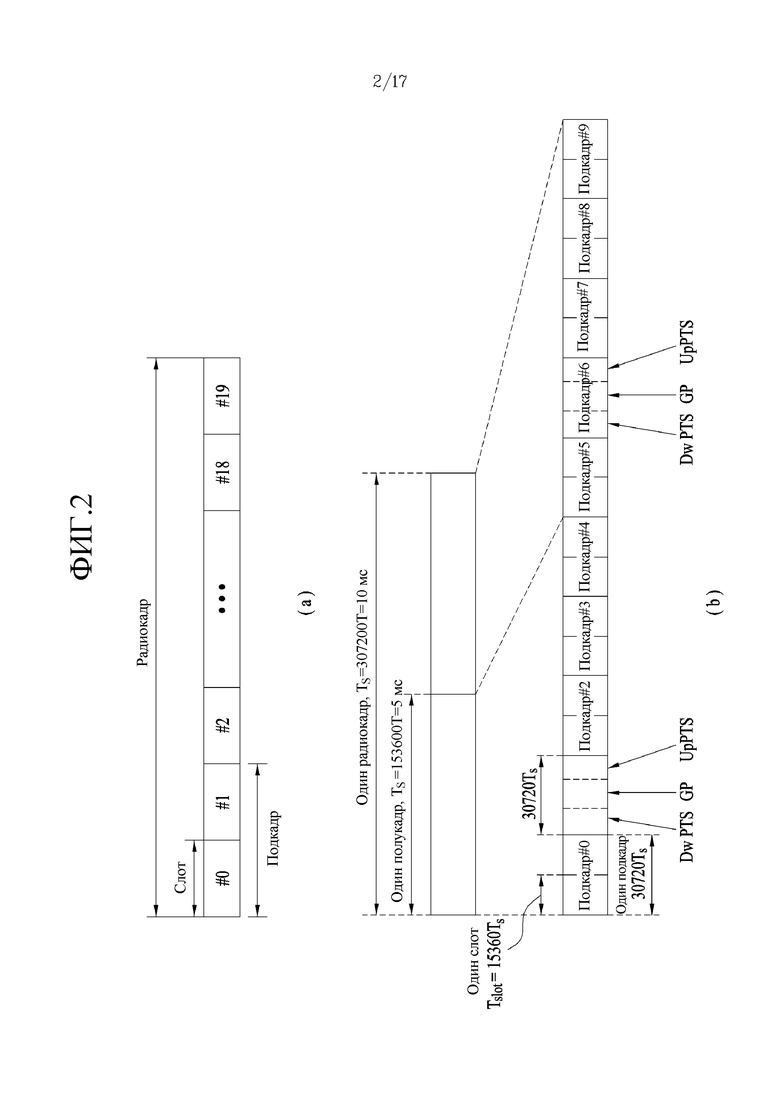
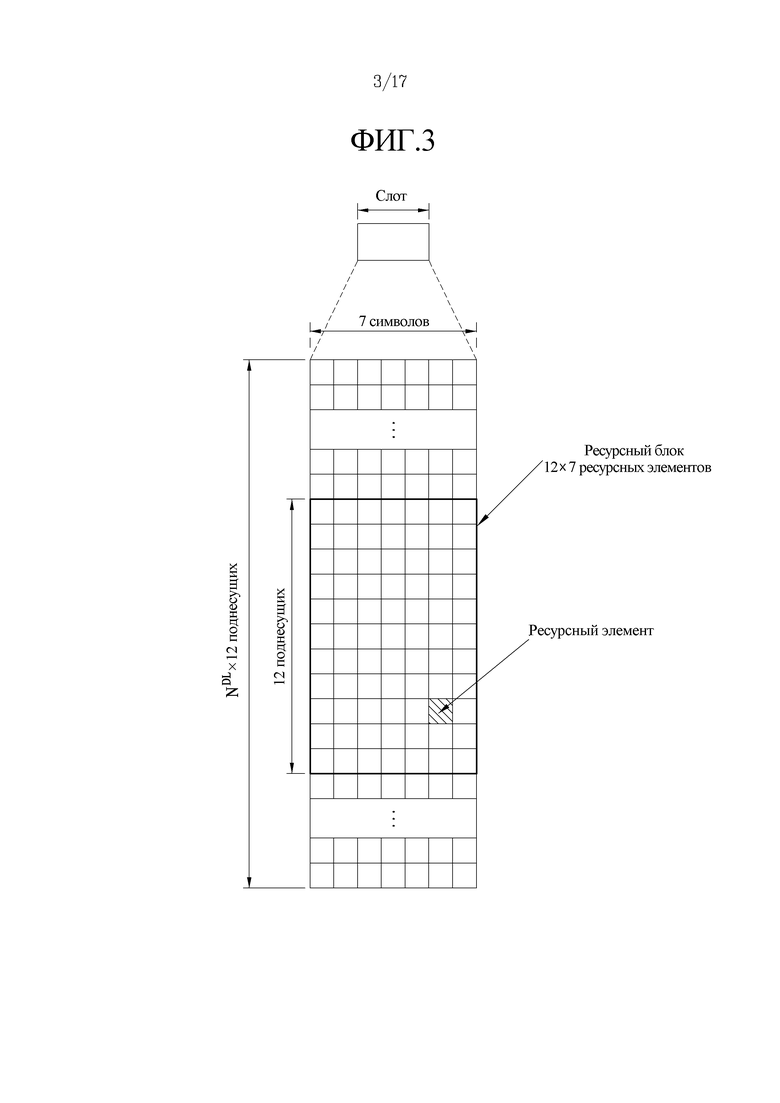
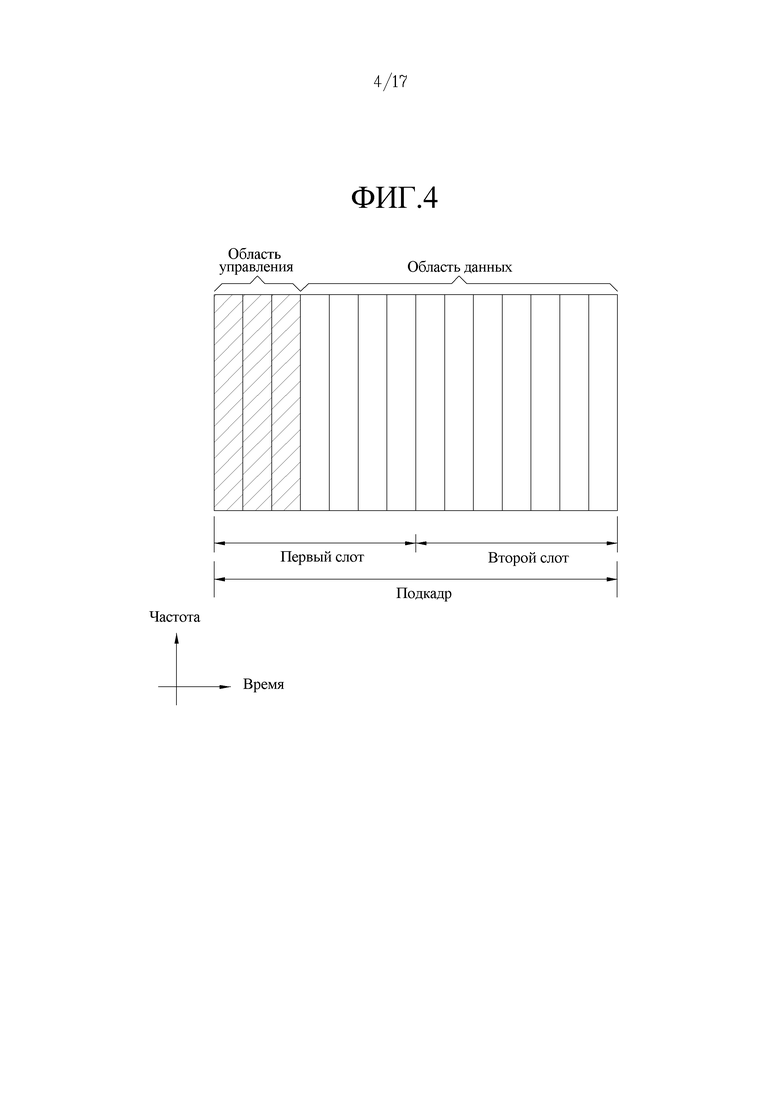
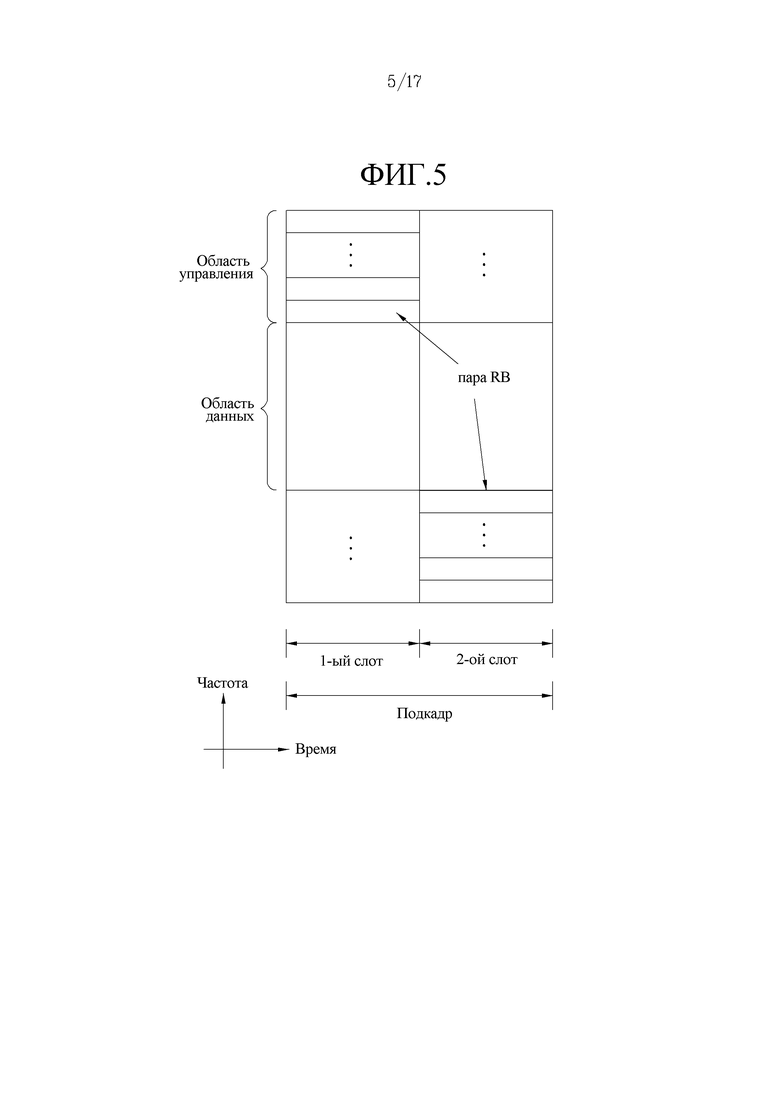
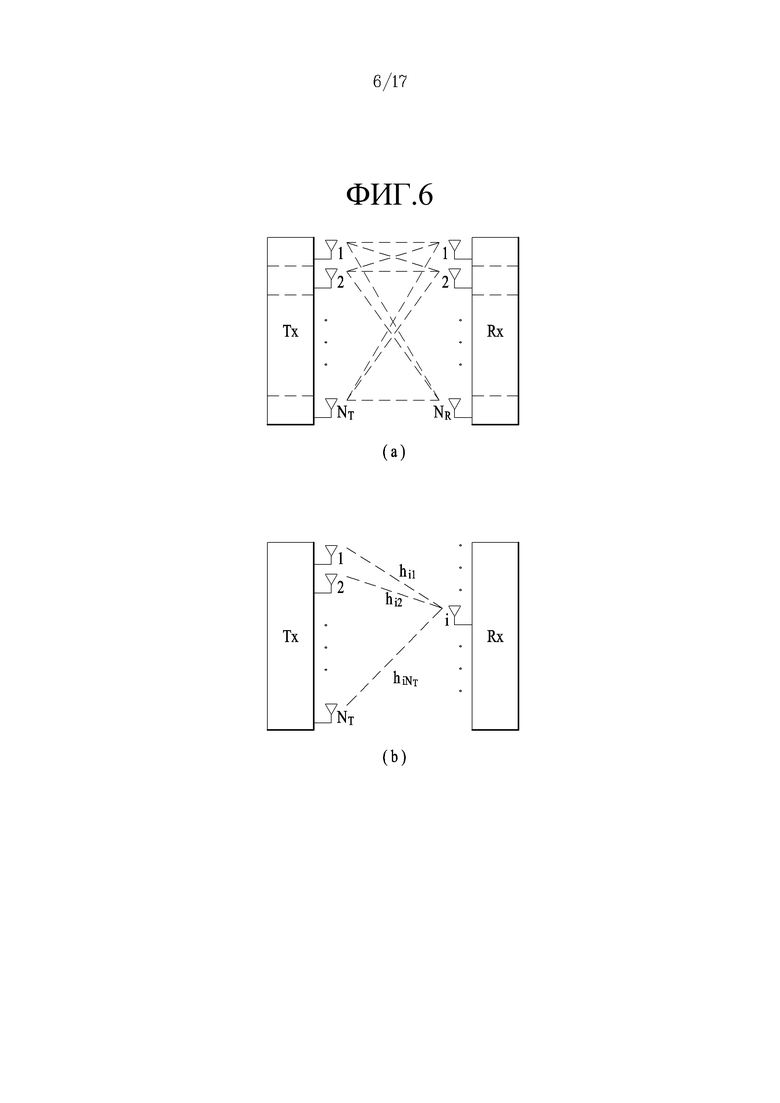
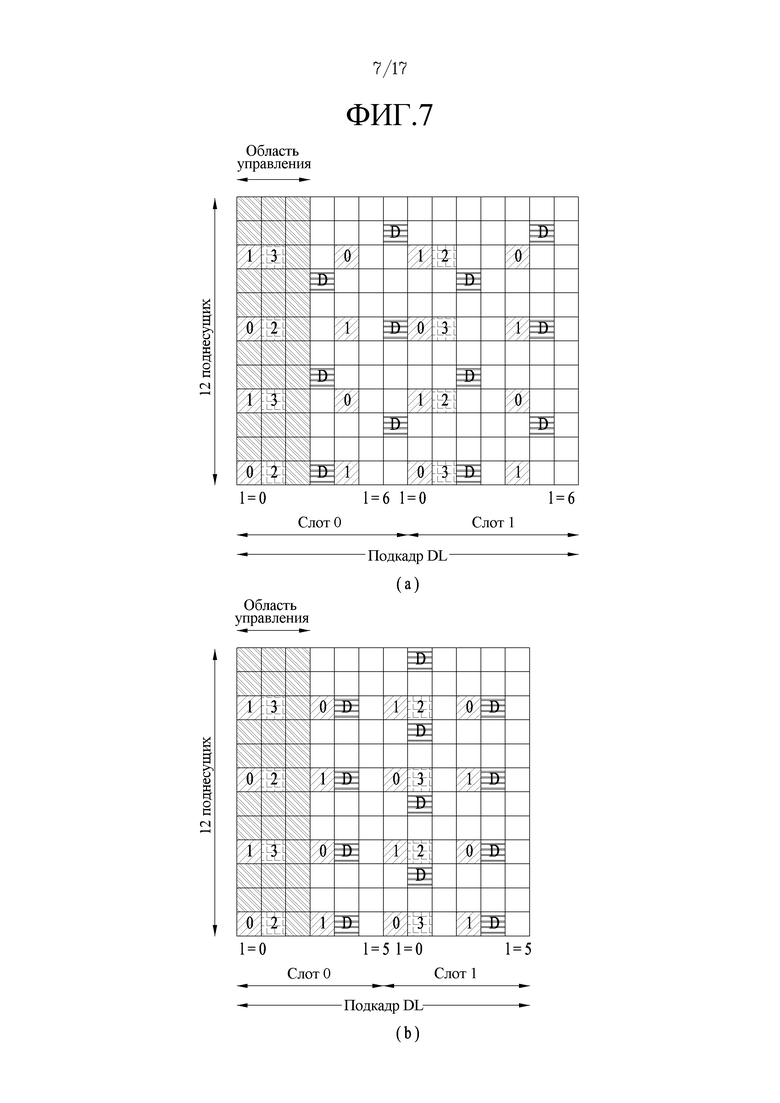
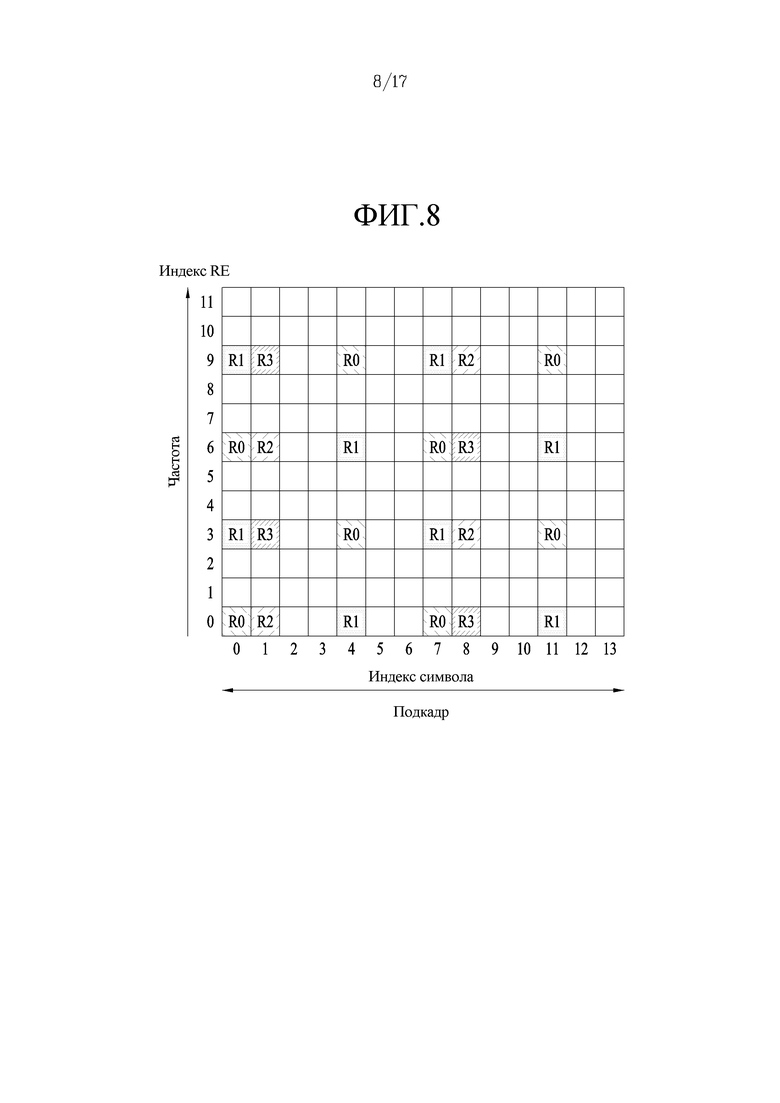
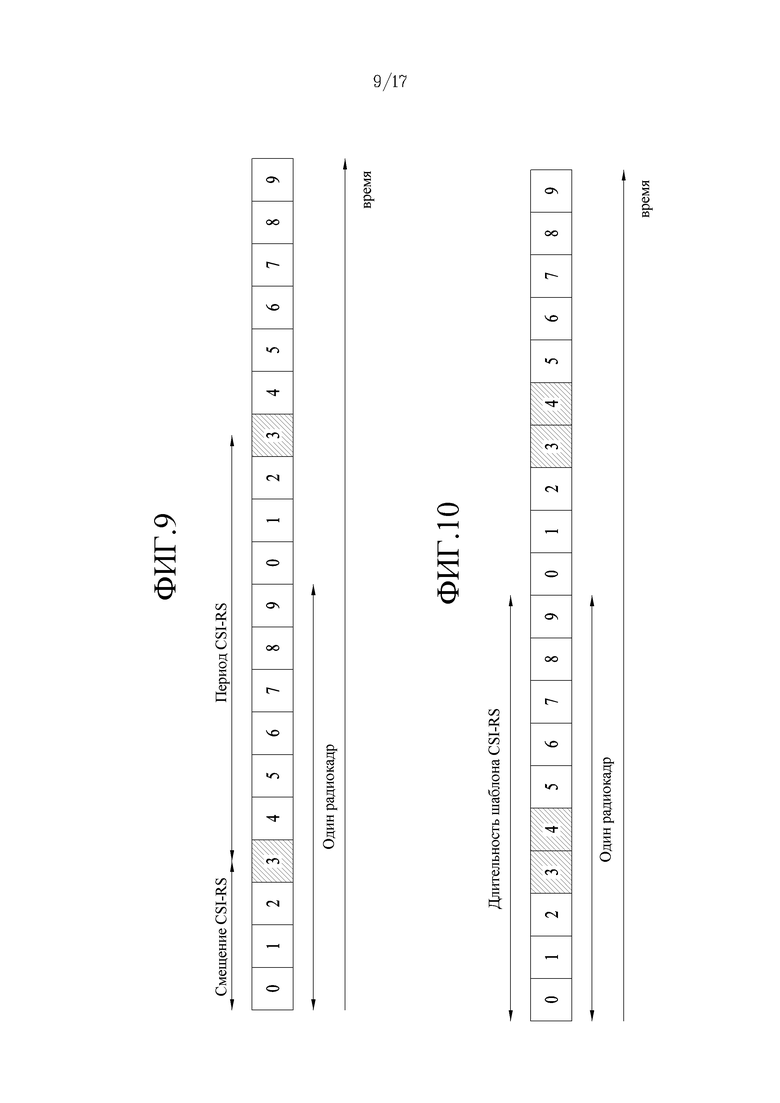
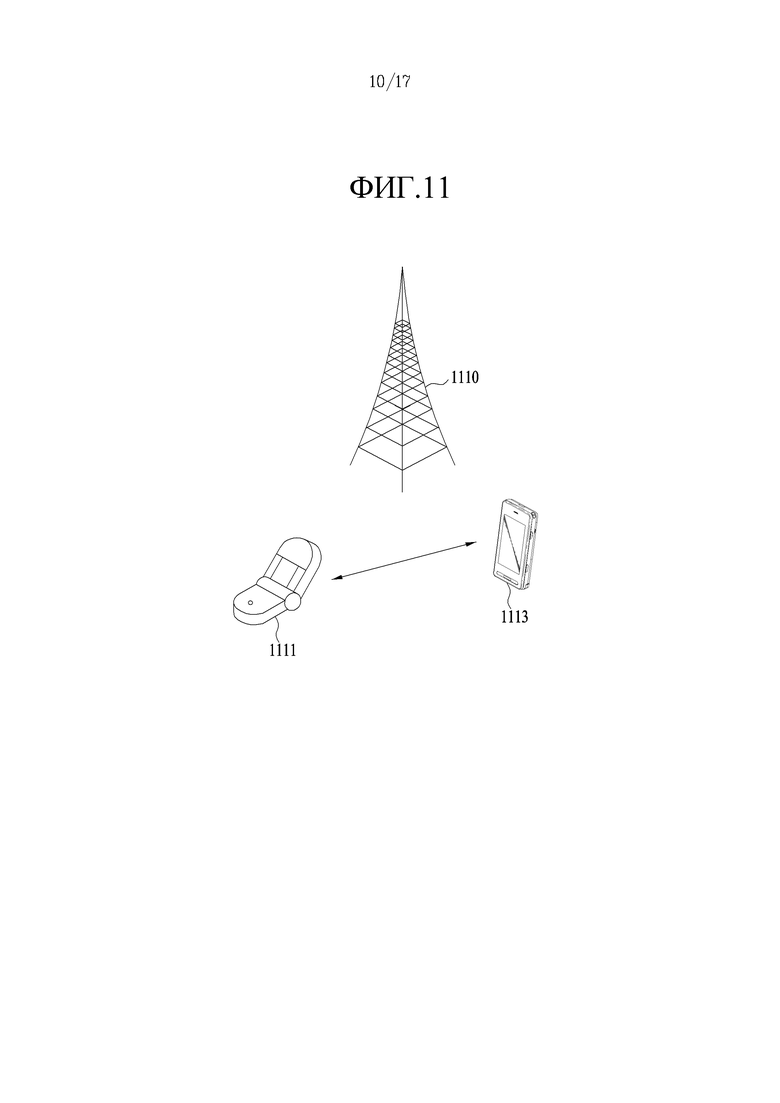
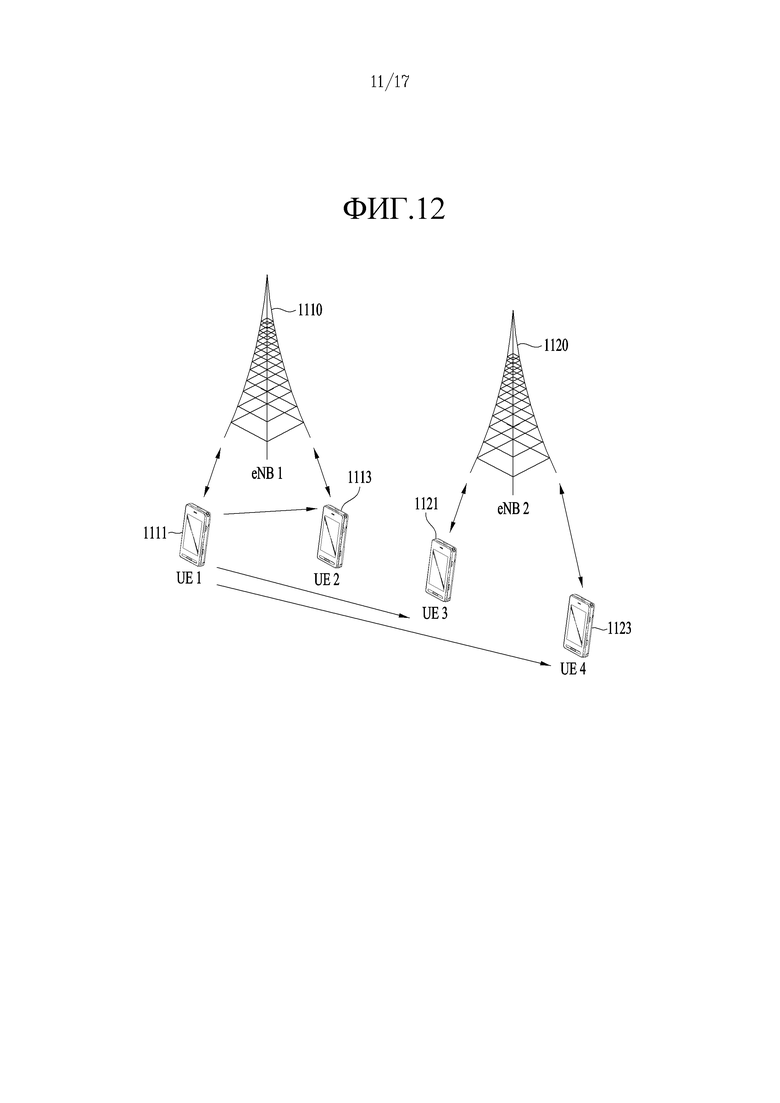
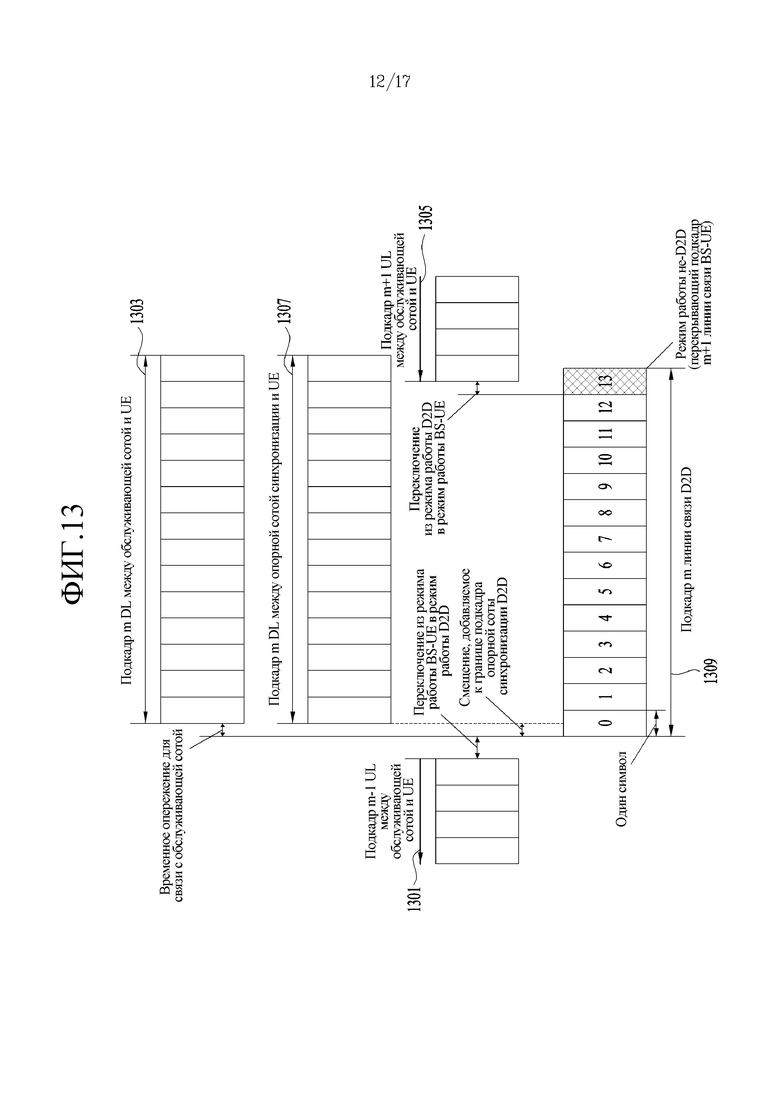
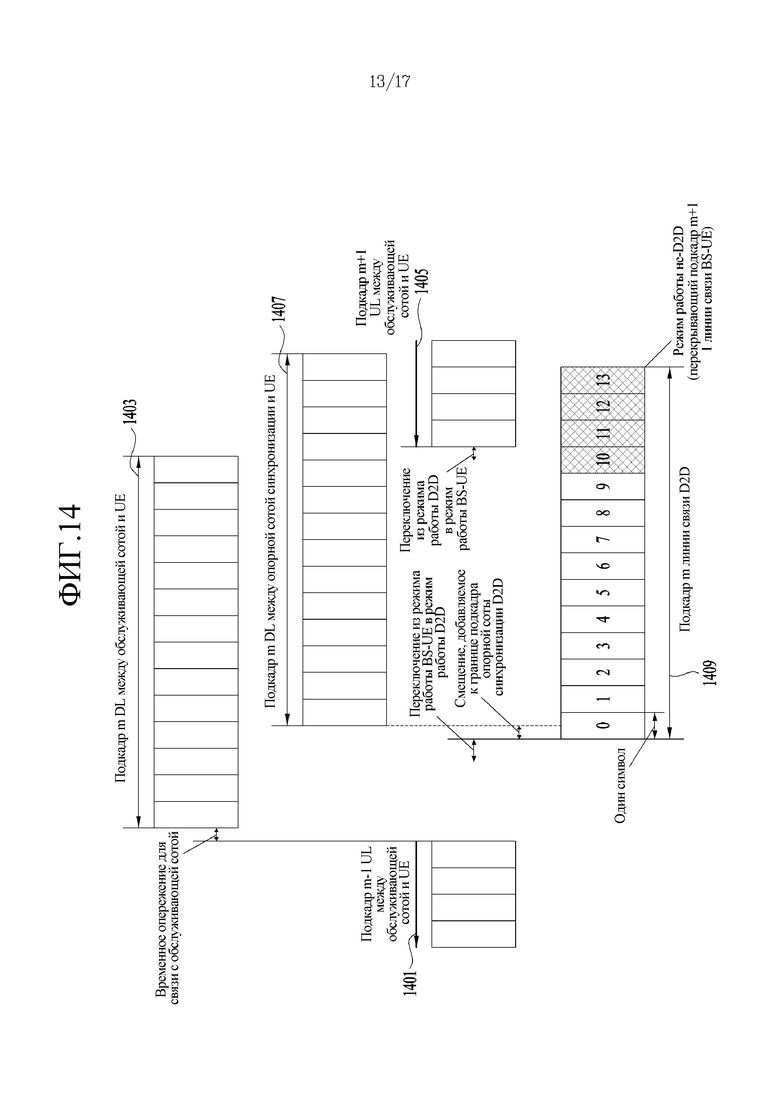
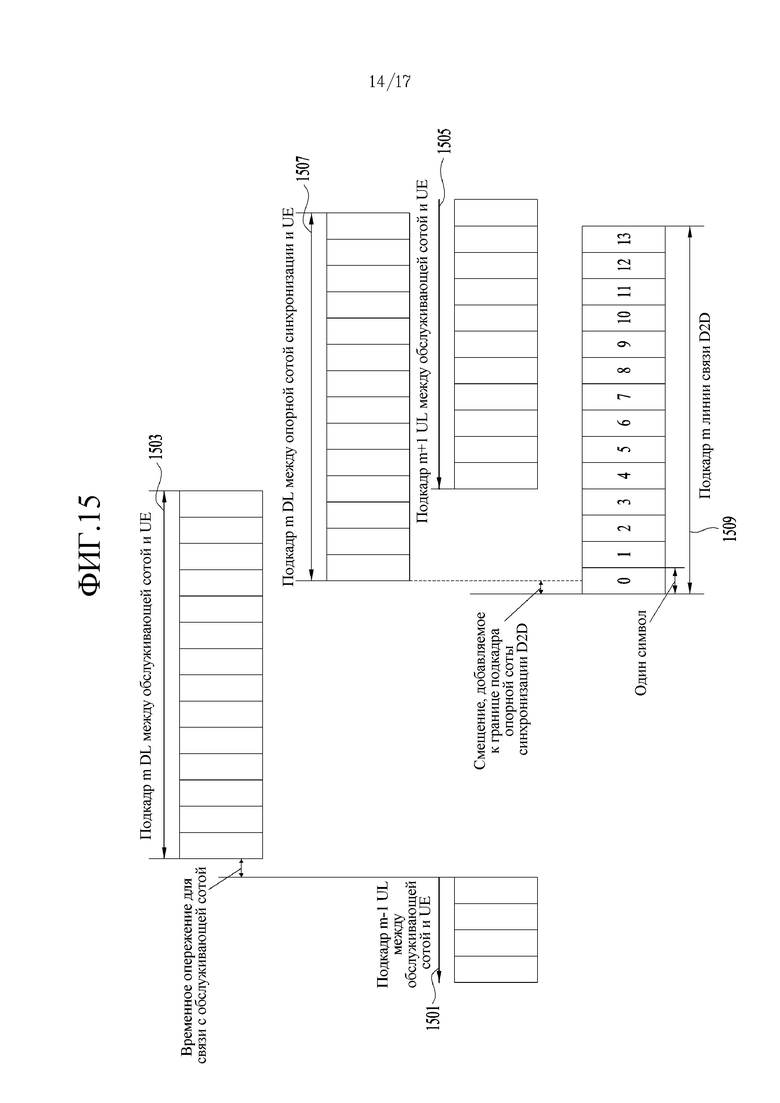
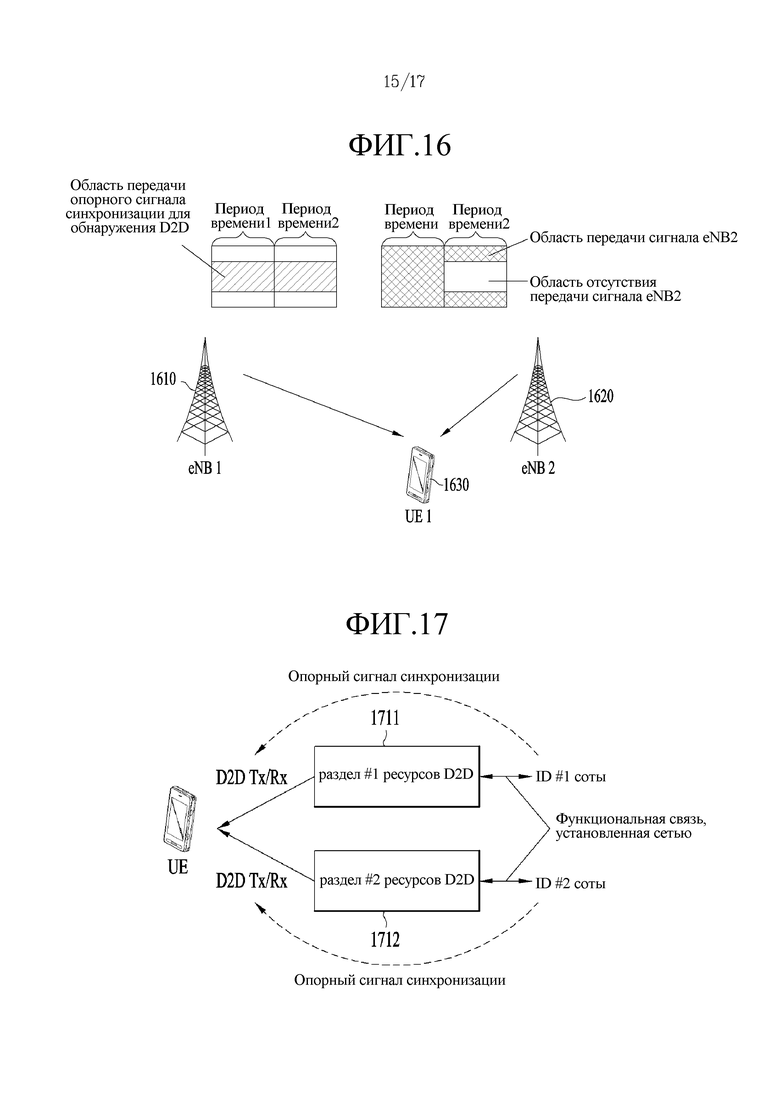
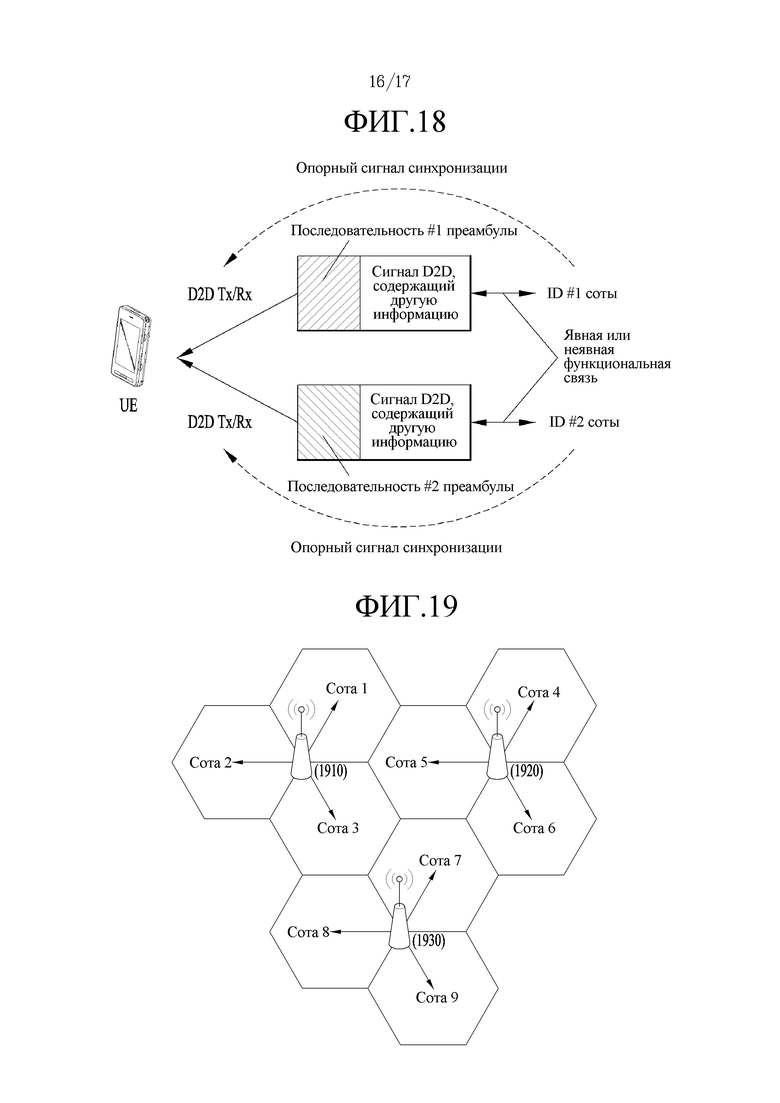
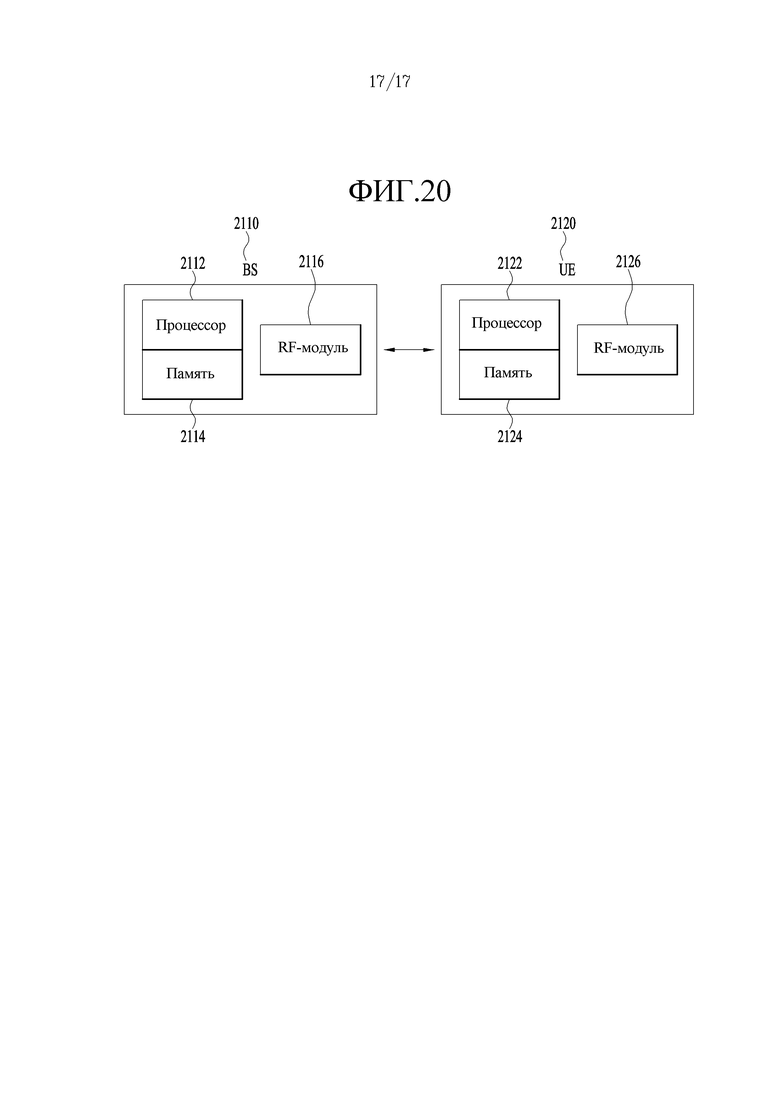
Изобретение относится к системе беспроводной связи и более конкретно к приему информации о синхронизации для прямой связи между терминалами. Изобретение в частности описывает способ, посредством которого первое пользовательское оборудование принимает информацию о синхронизации для линии связи устройство-устройство (D2D) в пользовательском оборудовании (UE) в системе беспроводной связи. В частности, способ содержит: прием информации о конфигурации для синхронизации от обслуживающей соты; и получение информации об опорной соте для синхронизации линии связи D2D на основании информации о конфигурации; и получение ресурса синхронизации на основании информации об опорной соте, причем информация об опорной соте содержит идентификатор опорной соты. 2 н. и 10 з.п. ф-лы, 20 ил., 2 табл.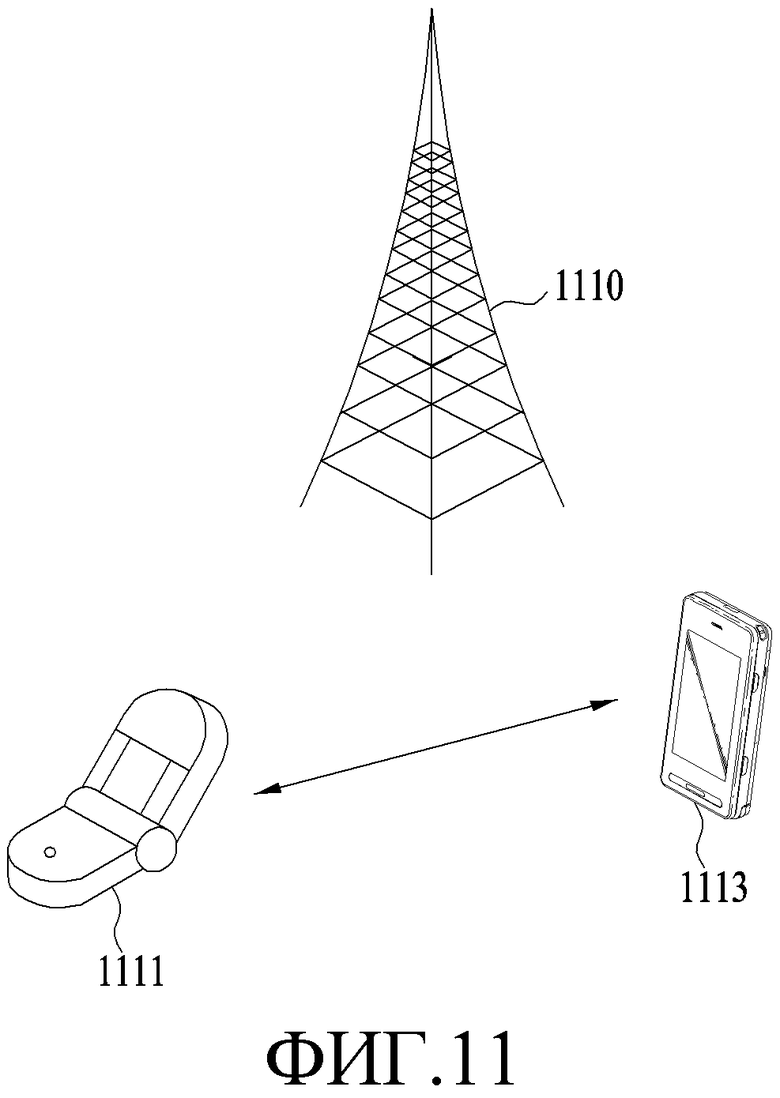
1. Способ приема информации о синхронизации для линии связи устройство-устройство (D2D) в пользовательском оборудовании (UE) в системе беспроводной связи, причем способ содержит:
прием информации о конфигурации для синхронизации от обслуживающей соты; и
получение информации об опорной соте для синхронизации линии связи D2D на основании информации о конфигурации; и
получение ресурса синхронизации на основании информации об опорной соте,
причем информация об опорной соте содержит идентификатор опорной соты.
2. Способ по п. 1, в котором информация о конфигурации включает в себя информацию о смещении, используемом для линии связи D2D.
3. Способ по п. 2, в котором информация о смещении указывает подкадр, используемый для линии связи D2D.
4. Способ по п. 3, в котором подкадр, указанный информацией о смещении, соответствует начальному подкадру, используемому для линии связи D2D.
5. Способ по п. 1, дополнительно содержащий прием сигнала D2D по линии связи D2D на основании ресурса синхронизации от опорной соты.
6. Способ по п. 5, в котором сигнал D2D принимается в пределах предварительно определенного диапазона в отношении ресурса синхронизации, полученного от опорной соты.
7. Пользовательское оборудование (UE) в системе беспроводной связи, поддерживающее линию связи устройство-устройство (D2D), причем пользовательское оборудование содержит:
радиочастотный (RF) модуль для приема информации о конфигурации для синхронизации от обслуживающей соты; и
процессор, подсоединенный к RF-модулю и выполненный с возможностью получения информации об опорной соте для синхронизации линии связи D2D на основании информации о конфигурации и получения ресурса синхронизации на основании информации об опорной соте;
причем информация об опорной соте содержит идентификатор опорной соты.
8. Пользовательское оборудование по п. 7, в котором информация о конфигурации включает в себя информацию о смещении, используемом для линии связи D2D.
9. Пользовательское оборудование по п. 8, в котором информация о смещении указывает подкадр, используемый для линии связи D2D.
10. Пользовательское оборудование по п. 9, в котором подкадр, указанный информацией о смещении, соответствует начальному подкадру, используемому для линии связи D2D.
11. Пользовательское оборудование по п. 7, в котором процессор выполнен с возможностью управления RF-модулем для приема сигнала D2D по линии связи D2D на основании ресурса синхронизации.
12. Пользовательское оборудование по п. 11, в котором сигнал D2D принимается в пределах предварительно определенного диапазона в отношении ресурса синхронизации.
| US 2009082002 A1, 26.03 | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ПЛАНИРОВАНИЯ ПО МНОЖЕСТВУ ТРАНЗИТНЫХ СЕТЕВЫХ СЕГМЕНТОВ | 2009 |
|
RU2464711C2 |

