Предлагаемое изобретение относится к контрольно-измерительной технике и может быть использовано в оптическом производстве для контроля асферических поверхностей оптических деталей в процессе их формообразования.
Известно устройство для определения положений дефектов на асферических поверхностях второго порядка оптических деталей [Пуряев Д.Т. Методы контроля оптических асферических поверхностей. М., «Машиностроение», 1976, с. 83-87]. Устройство содержит источник излучения и установленные последовательно по ходу световых лучей конденсор, диафрагму, коллиматорный объектив, формирующий параллельный пучок световых лучей, светоделитель, предназначенный для разделения параллельного пучка световых лучей на две ветви - опорную и объектную, в объектной ветви по ходу прошедших светоделитель лучей установлены фокусирующий объектив и автоколлимационное зеркало, в опорной ветви перпендикулярно к параллельному пучку световых лучей, отраженному от светоделителя, установлено плоское зеркало, отражающее падающий на него параллельный пучок световых лучей к светоделителю, пропускающему часть этого пучка световых лучей в приемную часть, содержащую телескопическую лупу
В процессе контроля оптическая деталь с асферической поверхностью устанавливается в объектную ветвь устройства таким образом, чтобы геометрический фокус F1 контролируемой асферической поверхности совпал с фокусом F' фокусирующего объектива. В результате освещающий асферическую поверхность пучок световых лучей после отражений последовательно от асферической поверхности, автоколлимационного зеркала, асферической поверхности и светоделителя будет поступать из объектной ветви в приемную часть. Картина интерференции, образованная в приемной части в результате интерференции световых волн, соответствующих пучкам световых лучей, пришедших из объектной и опорной ветвей, наблюдается визуально и фотографируется с использованием телескопической лупы. Посредством интерференционных полос этой картины визуализируются положения дефектов на контролируемой асферической поверхности. Для определения координаты y этих дефектов используется приближенная формула

где y - ордината асферической поверхности в декартовой системе координат, центр которой совмещен с вершиной асферической поверхности,
OF1 - параметр геометрического фокуса контролируемой асферической поверхности второго порядка,
 - фокусное расстояние фокусирующего объектива в объектной ветви,
- фокусное расстояние фокусирующего объектива в объектной ветви,
h - высота, на которой луч, распространяющийся от светоделителя, входит в фокусирующий объектив. Поскольку уравнение исходной асферической поверхности и фокусное расстояние фокусирующего объектива известны, то по данной формуле становится возможным определить координату y по измеренной величине h, которую определяют по интерференционной картине как половину расстояния между симметричными точками с искривлениями интерференционной полосы или как радиус интерференционного кольца.
Недостатком данного устройства является то, что оно позволяет контролировать асферические поверхности только второго порядка. Это обусловлено тем, что принцип работы устройства основан на использовании свойств анаберрационных точек асферических поверхностей второго порядка и применении в этом случае автоколлимационного зеркала либо сферического (при контроле гиперболических, эллиптических и параболических поверхностей), либо плоского (при контроле параболических поверхностей).
Недостатком данного устройства является также и то, что определение координаты y дефектов на контролируемой поверхности по приведенной выше формуле пригодно только для зональных (осесимметричных) ошибок, а для местных (не осесимметричных) дефектов координаты y определить не удается, так как высоту h в данном случае по интерференционной картине измерить невозможно. Кроме того, данное устройство обладает невысокой точностью, обусловленной использованием приближенной формулы (1) для нахождения координаты y асферической поверхности.
Наиболее близким по технической сущности к предлагаемой группе изобретений является устройство для определения положений дефектов на асферических поверхностях оптических деталей [Ларионов Н.П., Лукин А.В., Нюшкин А.А. Контроль малогабаритной асферической оптики с помощью синтезированных голограмм // Оптический журнал, 2011, т. 78, №4, с. 61-64]. Это устройство содержит монохроматический источник света (лазер) и последовательно установленные по ходу световых лучей афокальную систему, светоделитель для формирования опорной и объектной ветвей и приемной части, установленные в объектной ветви по ходу световых лучей, распространяющихся от светоделителя, первый фокусирующий объектив для формирования сходящегося гомоцентрического пучка световых лучей со светящейся точкой в его заднем фокусе, синтезированный голограммный оптический элемент, состоящий из трех осевых соосных между собой синтезированных голограмм, одна из которых является голограммой-компенсатором, а две другие голограммы являются юстировочными, плоское эталонное зеркало, установленное в опорной ветви перпендикулярно к световым лучам, распространяющимся от светоделителя, установленные в приемной части по ходу световых лучей, распространяющихся от светоделителя, второй фокусирующий объектив, фотоприемное устройство и блок отображения информации.
В данном устройстве дефекты на контролируемой асферической поверхности оптической детали определяют путем анализа интерференционной картины, зарегистрированной фотоприемным устройством и выведенной на экран блока отображения информации.
Недостатком данного устройства является невысокая точность определения положений дефектов на асферической поверхности оптической детали, обусловленная тем, что в устройстве отсутствует механизм для точного определения положения дефектов.
Задачей, на решение которой направлено предлагаемое техническое решение, является повышение точности определения положений дефектов на асферических поверхностях как второго, так и более высоких порядков.
Решение поставленной задачи достигается тем, что в предлагаемом устройстве для определения положений дефектов на асферической поверхности оптической детали, содержащем монохроматический источник света и последовательно установленные по ходу световых лучей афокальную систему, светоделитель для формирования опорной и объектной ветвей и приемной части, установленные в объектной ветви по ходу световых лучей, распространяющихся от светоделителя, первый фокусирующий объектив для формирования сходящегося гомоцентрического пучка световых лучей со светящейся точкой в его заднем фокусе, синтезированный голограммный оптический элемент, состоящий из трех осевых соосных между собой синтезированных голограмм, одна из которых является голограммой-компенсатором, а две другие голограммы являются юстировочными, плоское эталонное зеркало, установленное в опорной ветви перпендикулярно к световым лучам, распространяющимся от светоделителя, установленные в приемной части по ходу световых лучей, распространяющихся от светоделителя, второй фокусирующий объектив, фотоприемное устройство и блок отображения информации, устройство дополнительно содержит марку с двумя пересекающимися между собой штрихами, расположенную между светоделителем и первым фокусирующим объективом и совмещенную с промежуточным изображением асферической поверхности оптической детали, при этом марка закреплена в узле, снабженном механизмом угловых поворотов для угловой ориентации марки и тремя линейными каретками для выполнения возможности смещения марки в трех взаимно перпендикулярных направлениях, одно из которых перпендикулярно к плоскости расположения ее штрихов, для чего каждая линейная каретка снабжена приводом, подключенным к блоку управления приводами, для обеспечения возможности измерения величины смещения марки каждая линейная каретка снабжена датчиком линейного перемещения, подключенным на вход блока цифровой индикации, в приемной части по ходу световых лучей после светоделителя установлено плоское поворотное зеркало, в задней фокальной плоскости первого фокусирующего объектива установлена диафрагма;
а также тем, что оба штриха марки пересекаются друг с другом под углом 90 градусов и каждый из них ориентирован параллельно одному из двух направлений смещения марки, параллельных плоскости расположения пересекающихся между собой двух штрихов.
Решение поставленной задачи достигается тем, что в предлагаемом устройстве для определения положений дефектов на асферической поверхности оптической детали, содержащем монохроматический источник света и последовательно установленные по ходу световых лучей афокальную систему, светоделитель для формирования опорной и объектной ветвей и приемной части, установленные в объектной ветви по ходу световых лучей, распространяющихся от светоделителя, первый фокусирующий объектив для формирования сходящегося гомоцентрического пучка световых лучей со светящейся точкой в его заднем фокусе, синтезированный голограммный оптический элемент, состоящий из трех осевых соосных между собой синтезированных голограмм, одна из которых является голограммой-компенсатором, а две другие голограммы являются юстировочными, плоское эталонное зеркало, установленное в опорной ветви перпендикулярно к световым лучам, распространяющимся от светоделителя, установленные в приемной части по ходу световых лучей, распространяющихся от светоделителя, второй фокусирующий объектив, фотоприемное устройство и блок отображения информации, устройство дополнительно содержит первую марку с двумя пересекающимися между собой штрихами, расположенную между афокальной системой и светоделителем и совмещенную с первым промежуточным изображением асферической поверхности оптической детали, при этом первая марка закреплена в первом узле, снабженном механизмом угловых поворотов для угловой ориентации первой марки и тремя линейными каретками для выполнения возможности смещения первой марки в трех взаимно перпендикулярных направлениях, одно из которых перпендикулярно к плоскости расположения ее штрихов, для чего каждая линейная каретка снабжена приводом, подключенным к первому блоку управления приводами, для обеспечения возможности измерения величины смещения первой марки каждая линейная каретка снабжена датчиком линейного перемещения, подключенным на вход первого блока цифровой индикации, в приемной части по ходу световых лучей после светоделителя установлено плоское поворотное зеркало, введена вторая марка с двумя пересекающимися между собой штрихами, которая совмещена со вторым промежуточным изображением асферической поверхности оптической детали и закреплена во втором узле, снабженном механизмом угловых поворотов для угловой ориентации второй марки и тремя линейными каретками для выполнения возможности смещения второй марки в трех взаимно перпендикулярных направлениях, одно из которых перпендикулярно к плоскости расположения ее штрихов, для чего каждая линейная каретка снабжена приводом, подключенным ко второму блоку управления приводами, для обеспечения возможности измерения величины смещения второй марки каждая линейная каретка снабжена датчиком линейного перемещения, подключенным на вход второго блока цифровой индикации, в задней фокальной плоскости первого фокусирующего объектива установлена диафрагма;
а также тем, что оба штриха каждой марки пересекаются друг с другом под углом 90 градусов и каждый из них ориентирован параллельно одному из двух направлений смещения соответствующей ему марки, параллельных плоскости расположения пересекающихся между собой двух штрихов.
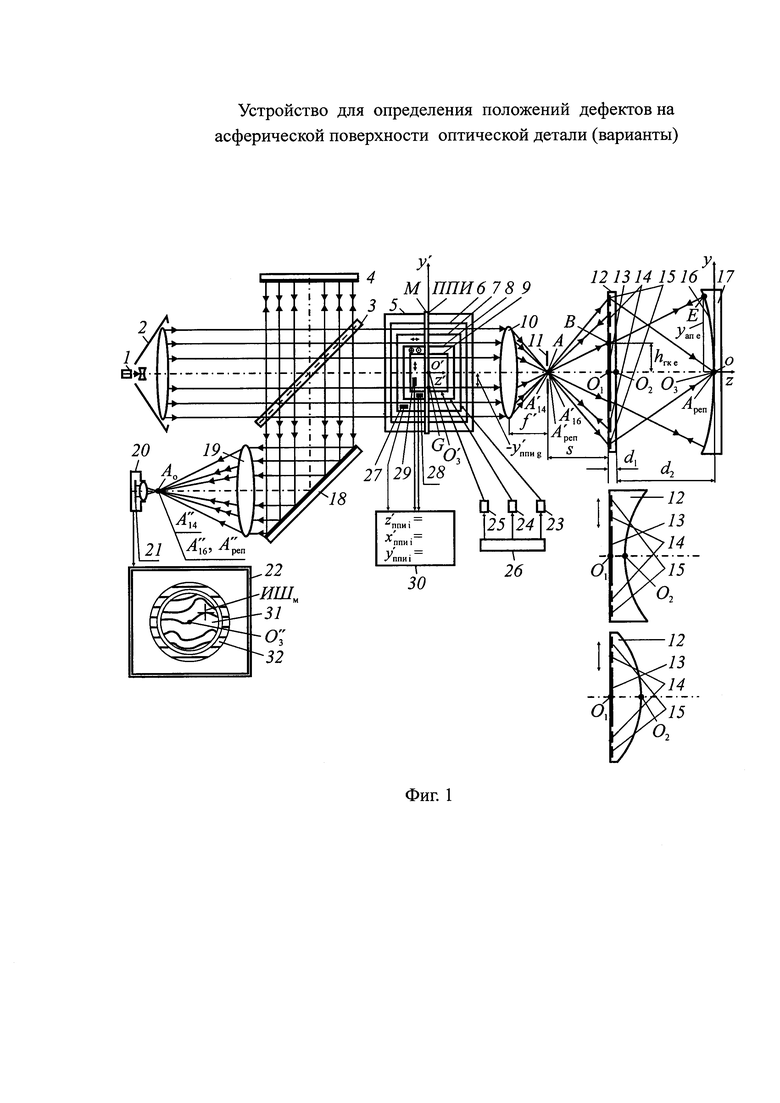
На фиг. 1 изображена принципиальная оптическая схема предложенного устройства для определения положений дефектов на асферической поверхности оптической детали с применением одной марки М, расположенной в объектной ветви между светоделителем и первым фокусирующим объективом.
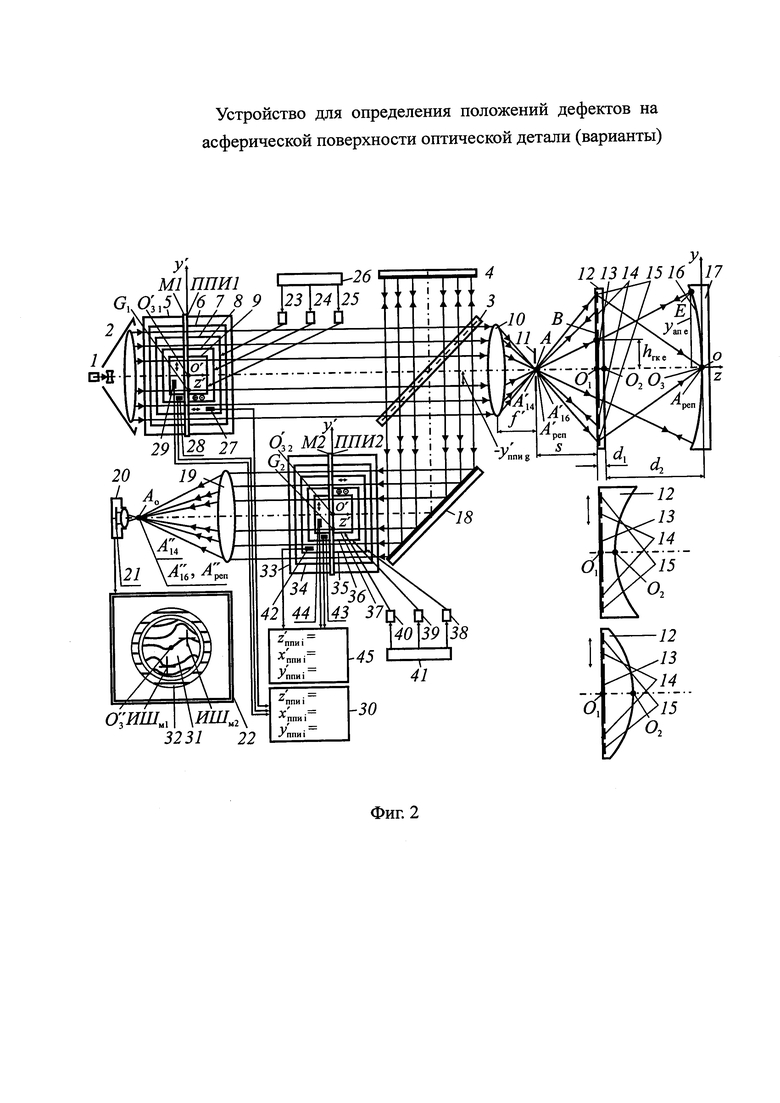
На фиг. 2 изображена принципиальная оптическая схема предложенного устройства для определения положений дефектов на асферической поверхности оптической детали с применением двух марок M1 и М2, одна из которых (M1) расположена между афокальной системой и светоделителем, а вторая (М2) - в приемной части между плоским поворотным зеркалом и вторым фокусирующим объективом.
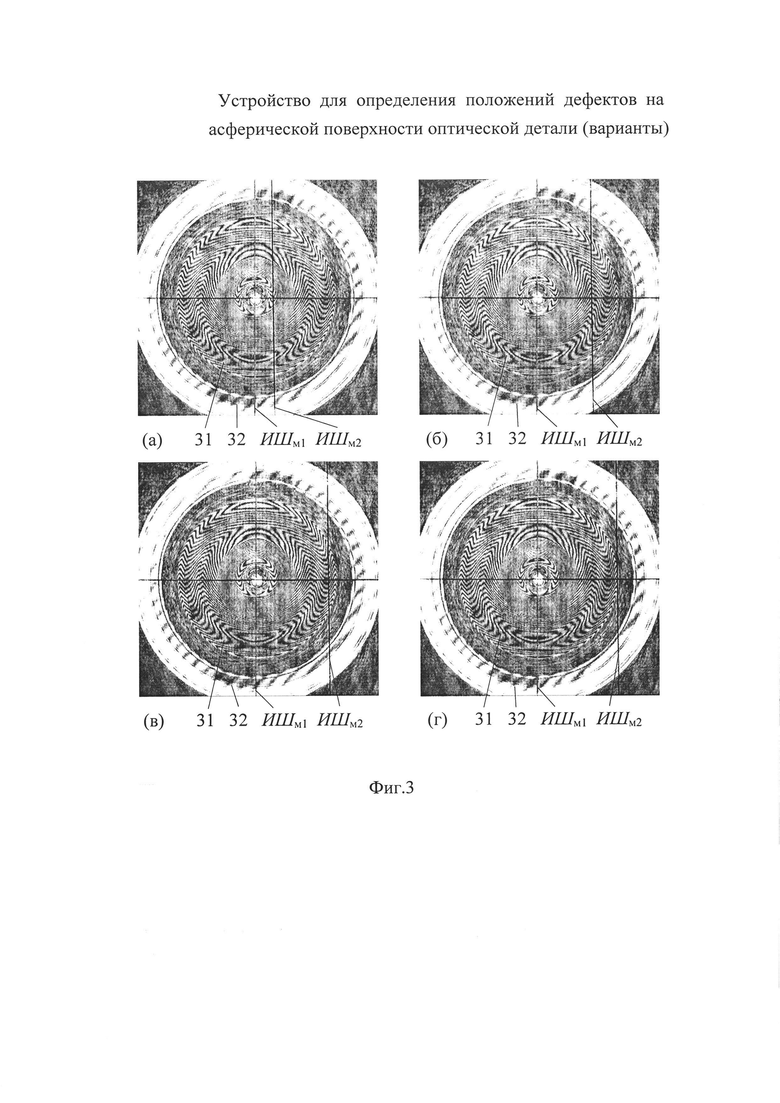
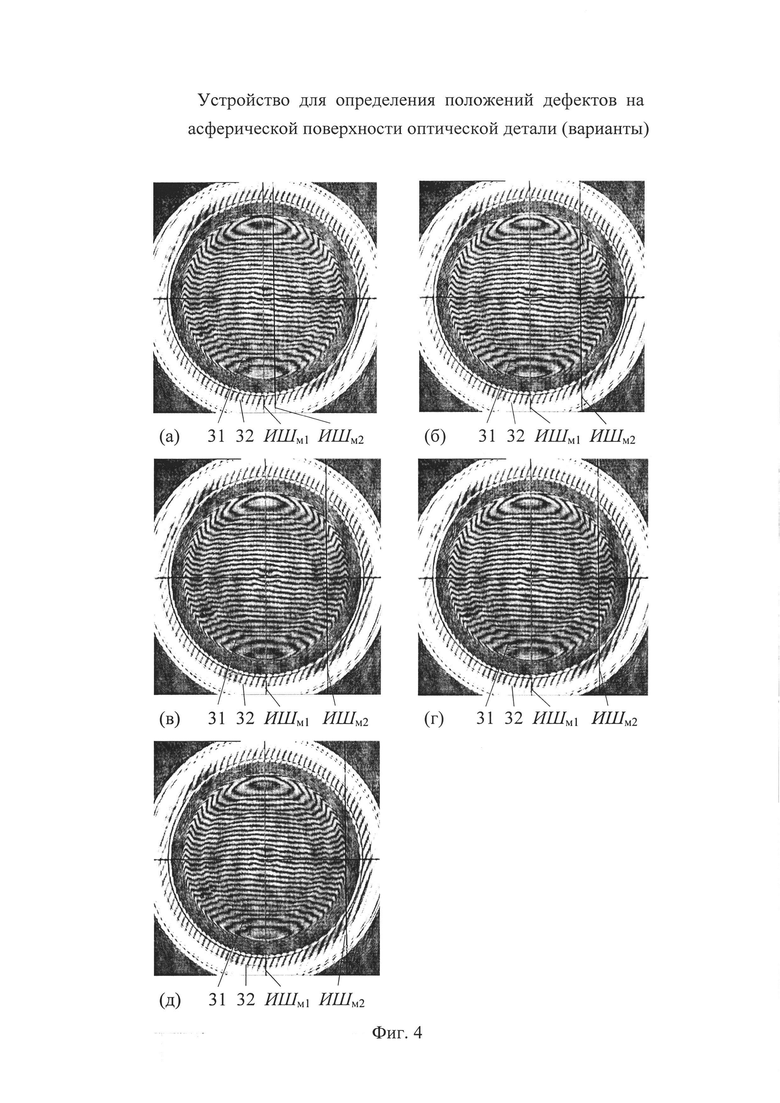
На фиг. 3 и фиг. 4 приведены интерферограммы, полученные при контроле конкретной асферической поверхности оптической детали, предложенным устройством (фиг. 2) с применением марки M1, расположенной между афокальной системой и светоделителем, и марки М2, расположенной в приемной части между плоским поворотным зеркалом и вторым фокусирующим объективом.
Предлагаемое устройство (на фиг. 1) для определения положений дефектов на асферической поверхности оптической детали содержит монохроматический (лазерный) источник света 1, последовательно установленные по ходу световых лучей афокальную систему 2, светоделитель 3, разделяющий падающий на него пучок световых лучей на два пучка, один из которых (отраженный от светоделителя 3) поступает в опорную ветвь, а другой (прошедший светоделитель 3) - в объектную ветвь устройства. В опорной ветви перпендикулярно к световым лучам, распространяющимся от светоделителя 3, установлено плоское эталонное зеркало 4. В объектной ветви по ходу световых лучей последовательно установлены узел 5 с закрепленной на нем маркой М, при этом узел 5 снабжен механизмом угловых поворотов 6 и линейными каретками 7, 8 и 9 для угловой ориентации марки М и смещения ее линейными каретками в трех взаимно перпендикулярных направлениях, первый фокусирующий объектив 10 с задним фокусным расстоянием для формирования в заднем фокусе светящейся точки A, диафрагма 11, расположенная в задней фокальной плоскости первого фокусирующего объектива 10, синтезированный голограммный оптический элемент 12, расположенный на расстоянии s от светящейся точки A до точки O1 на передней поверхности его подложки и состоящий из трех осевых соосных между собой синтезированных голограмм: голограммы-компенсатора 13, формирующей в проходящем свете осесимметричный пучок световых лучей, ось которого задает оптическую ось в объектной ветви, юстировочной голограммы 14, формирующей в отраженном свете автоколлимационное изображение A'14 светящейся точки A, и юстировочной голограммы 15, формирующей в проходящем свете светящуюся точку-репер Aреп, расположенную на расстоянии d2 от точки О2 на задней поверхности подложки синтезированного голограммного оптического элемента 12 и совпадающую с вершиной О3 асферической поверхности 16. Толщина подложки синтезированного голограммного оптического элемента 12 равна d1. Марка М ориентирована таким образом, чтобы плоскость расположения ее двух пересекающихся между собой штрихов была совмещена с плоскостью промежуточного изображения ППИ асферической поверхности 16 оптической детали 17, расположенной между светоделителем 3 и первым фокусирующим объективом 10. В приемной части по ходу световых лучей, распространяющихся от светоделителя 3, установлены плоское поворотное зеркало 18, второй фокусирующий объектив 19, фотоприемное устройство (например, цифровая видеокамера) 20 с плоскостью регистрации 21 его светочувствительных элементов и блок отображения информации (например, монитор) 22. Устройство также содержит приводы 23, 24 и 25, соединенные с линейными каретками 7, 8 и 9 соответственно и подключенные к блоку управления приводами 26 для придания смещений марке М в трех взаимно перпендикулярных направлениях, датчики линейных перемещений 27, 28 и 29, которыми снабжены линейные каретки 7, 8 и 9, соответственно подключенные к входу блока цифровой индикации 30 величин смещений марки М в трех взаимно перпендикулярных направлениях.
Предлагаемое устройство (на фиг. 2) для определения положений дефектов на асферической поверхности оптической детали содержит монохроматический (лазерный) источник света 1, последовательно установленные по ходу световых лучей афокальную систему 2, первую марку M1, светоделитель 3, разделяющий падающий на него пучок световых лучей на два пучка, один из которых (отраженный от светоделителя 3) поступает в опорную ветвь, а другой (прошедший светоделитель 3) - в объектную ветвь устройства. В опорной ветви перпендикулярно к световым лучам, распространяющимся от светоделителя 3, установлено плоское эталонное зеркало 4. Первая марка M1 закреплена в первом узле 5, снабженном механизмом угловых поворотов 6 для угловой ориентации первой марки M1 и линейными каретками 7, 8 и 9 для смещения ее в трех взаимно перпендикулярных направлениях. В объектной ветви по ходу световых лучей, прошедших светоделитель 3, последовательно установлены первый фокусирующий объектив 10 с задним фокусным расстоянием для формирования в заднем фокусе светящейся точки A, диафрагма 11, расположенная в задней фокальной плоскости первого фокусирующего объектива 10, синтезированный голограммный оптический элемент 12, расположенный на расстоянии s от светящейся точки A до точки O1 на передней поверхности его подложки и состоящий из трех осевых соосных между собой синтезированных голограмм: голограммы-компенсатора 13, формирующей в проходящем свете осесимметричный пучок световых лучей, ось которого задает оптическую ось в объектной ветви, юстировочной голограммы 14, формирующей в отраженном свете автоколлимационное изображение A'14 светящейся точки A, и юстировочной голограммы 15, формирующей в проходящем свете светящуюся точку-репер Ареп, расположенную на расстоянии d2 от точки О2 на задней поверхности подложки синтезированного программного оптического элемента 12 и совпадающую с вершиной О3 асферической поверхности 16. Толщина подложки синтезированного голограммного оптического элемента 12 равна d1. В приемной части по ходу световых лучей, распространяющихся от светоделителя 3, установлены плоское поворотное зеркало 18, вторая марка М2, второй фокусирующий объектив 19, фотоприемное устройство (например, цифровая видеокамера) 20 с плоскостью регистрации 21 его светочувствительных элементов и блок отображения информации (например, монитор) 22. Плоскость расположения штрихов первой марки M1 совмещена с плоскостью первого промежуточного изображения ППИ1, расположенного между афокальной системой 2 и светоделителем 3. Линейные каретки 7, 8 и 9 первого узла 5 для крепления первой марки M1 снабжены приводами 23, 24 и 25 соответственно, которые подключены к первому блоку управления приводами 26 для придания смещений первой марке M1 в трех взаимно перпендикулярных направлениях. Для измерения величин смещений первой марке M1 служат датчики линейных перемещений 27, 28 и 29, которыми снабжены линейные каретки 7, 8 и 9 соответственно и которые подключены к входу первого блока цифровой индикации 30 величин смещений первой марки M1 в трех взаимно перпендикулярных направлениях. Вторая марка М2 введена в приемную часть после плоского поворотного зеркала 18. При этом она закреплена во втором узле 33, снабженном механизмом угловых поворотов 34 для угловой ориентации второй марки М2 и линейными каретками 35, 36 и 37 для смещения ее в трех взаимно перпендикулярных направлениях. Плоскость расположения штрихов второй марки М2 совмещена с плоскостью второго промежуточного изображения ППИ2, расположенного между плоским поворотным зеркалом 18 и вторым фокусирующим объективом 19. Линейные каретки 35, 36 и 37 второго узла 33 крепления второй марки М2 снабжены приводами 38, 39 и 40 соответственно, которые подключены ко второму блоку управления приводами 41 для придания смещений второй марке М2 в трех взаимно перпендикулярных направлениях. Для измерения величин смещений второй марки М2 служат датчики линейных перемещений 42, 43 и 44, которыми снабжены линейные каретки 35, 36 и 37 соответственно и которые подключены к входу второго блока цифровой индикации 45 величин смещений второй марки М2 в трех взаимно перпендикулярных направлениях.
Предлагаемое устройство (на фиг. 1) для определения положений дефектов на асферической поверхности оптической детали работает следующим образом. Пучок световых лучей от монохроматического (лазерного) источника света 1 поступает в афокальную систему 2 и преобразуется ею в расширенный параллельный пучок световых лучей, который поступает в светоделитель 3, где частично проходит его и частично отражается им. Отраженная часть пучка световых лучей поступает в опорную ветвь устройства, падает на плоское эталонное зеркало 4, ориентированное перпендикулярно к световым лучам этого пучка, отражается от него и в автоколлимационном ходе частично отражается от светоделителя 3 и частично проходит его. Отраженная часть опорного пучка световых лучей проходит в обратном направлении афокальную систему 2 и падает в отверстие выходного окна источника света 1, а прошедшая светоделитель 3 часть опорного пучка поступает в приемную часть, отражается от плоского поворотного зеркала 18 и поступает во второй фокусирующий объектив 19, которым фокусируется в точку Ао, служащую в устройстве опорной точкой. Затем эта часть опорного пучка световых лучей проходит объектив фотоприемного устройства (например, цифровой видеокамеры) 20 и падает на плоскость регистрации 21 светочувствительных элементов фотоприемного устройства 20.
В объектную ветвь устройства поступает прошедшая светоделитель 3 часть параллельного пучка световых лучей, вышедшего из афокальной системы 2, которая проходит в этой ветви марку М, первый фокусирующий объектив 10, преобразуясь им в сходящийся гомоцентрический пучок световых лучей с центром в виде светящейся точки A в заднем фокусе объектива 10, проходит диафрагму 11, расположенную в задней фокальной плоскости объектива 10, и падает на синтезированный голограммный оптический элемент 12 в виде расходящегося гомоцентрического пучка световых лучей, освещая голограмму-компенсатор 13 и юстировочные голограммы 14 и 15. Голограмма-компенсатор 13 в процессе дифракции на ней световых лучей в проходящем свете формирует осесимметричный пучок световых лучей, каждый луч которого падает на асферическую поверхности 16 оптической детали 17 по соответствующей ему определенной нормали этой поверхности и отражается от нее в обратном направлении. В этом случае отражающая асферическая поверхность 16 оптической детали 17 выступает в качестве предмета. Отраженный от этой асферической поверхности 16 оптической детали 17 пучок световых лучей в автоколлимационном ходе распространяется к голограмме-компенсатору 13 и в результате дифракции на ней фокусируется в точку A'16, которая является автоколлимационным изображением светящейся точки A. Затем этот пучок световых лучей проходит в обратном направлении диафрагму 11 и первый фокусирующий объектив 10, который преобразует его в параллельный пучок световых лучей. В ходе данного параллельного пучка световых лучей посредством синтезированной голограммы-компенсатора 13 и первого фокусирующего объектива 10 формируется изображение асферической поверхности 16 оптической детали 17, которое является промежуточным и обратным. Оно расположено в плоскости промежуточного изображения ППИ. В связи с этим точка O'3, лежащая в центре промежуточного изображения асферической поверхности 16, а значит, и на оптической оси, является оптически сопряженной с вершиной О3 асферической поверхности 16 оптической детали 17 и является ее изображением. Точно также точка G, лежащая в плоскости промежуточного изображения ППИ, является изображением точки E, расположенной вблизи границы асферической поверхности 16 оптической детали 17.
С плоскостью промежуточного изображения ППИ совмещена плоскость расположения штрихов марки М. Очевидно, что в этом случае в плоскости промежуточного изображения ППИ в обратном ходе лучей от асферической поверхности 16 оптической детали 17 будет формироваться также и изображение марки М. Далее, параллельный пучок световых лучей после прохождения марки М падает на светоделитель 3 и делится им на два пучка, один из которых, прошедший светоделитель 3, распространяется к афокальной системе 2, а другой, отраженный от светоделителя 3, поступает в приемную часть, где отражается от плоского поворотного зеркала 18, проходит второй фокусирующий объектив 19, которым он фокусируется в точку A''16, проходит объектив фотоприемного устройства (например, цифровой видеокамеры) 20 и падает на плоскость регистрации 21 светочувствительных элементов фотоприемного устройства 20. Посредством светоделителя 3, плоского поворотного зеркала 18, второго фокусирующего объектива 19 и объектива фотоприемного устройства (например, цифровой видеокамеры) 20 в плоскость регистрации 21 проецируется сформированное в плоскости промежуточного изображения ППИ промежуточное изображение асферической поверхности 16 оптической детали 17. В результате в плоскости регистрации 21 формируется конечное изображение асферической поверхности 16 оптической детали 17, которое является прямым. В эту же плоскость регистрации 21 проецируется также изображение штрихов марки М. В результате совмещения в приемной части пучков световых лучей, пришедших из опорной и объектной ветвей, и возникшей в связи с этим интерференции соответствующих им световых волн, образуется интерференционная картина для контролируемой асферической поверхности 16 оптической детали 17, которая также отображается в плоскости регистрации 21. Конечное изображение асферической поверхности 16 оптической детали 17, вместе с изображением этой интерференционной картины, а также марки М передаются фотоприемным устройством (например, цифровой видеокамерой) 20 на экран блока отображения информации (например, монитора) 22, где 31 - конечное изображение асферической поверхности 16 оптической детали 17, с соответствующей ей интерференционной картиной, а ИШм - изображение штрихов марки М. На экране блока отображения информации (например, монитора) 22 изображена точка O''3, расположенная в центре изображения 31 асферической поверхности 16 оптической детали 17 и интерференционной картины для этой асферической поверхности. В связи с этим она соответствует точке O'3 в плоскости промежуточного изображения ППИ и точке О3 - вершине асферической поверхности 16 оптической детали 17. Для того чтобы было удобно и наглядно идентифицировать дефекты и определять их расположения на контролируемой асферической поверхности 16 оптической детали 17, необходимо, чтобы на экране блока отображения информации (например, монитора) 22 было сформировано прямое изображение асферической поверхности 16 оптической детали 17. Для этого необходимо корпус фотоприемного устройства (например, цифровой видеокамеры) 20 повернуть на 180° вокруг его оптической оси относительно исходного рабочего положения фотоприемного устройства (например, цифровой видеокамеры) 20.
Наличие дефектов на контролируемой асферической поверхности 16 оптической детали 17 определяют путем визуального анализа интерференционной картины, присутствующей на конечном изображении 31 этой асферической поверхности 16 на экране блока отображения информации (например, монитора) 22. Дефекты и их положения на контролируемой асферической поверхности 16 визуализируются искривлениями полос в этой интерференционной картине. По степени искривления интерференционных полос выбирают на контролируемой асферической поверхности 16 характерные точки, которым соответствуют наибольшие дефекты и которые необходимо устранить в первую очередь. Затем определяют положения этих характерных точек с дефектами на контролируемой асферической поверхности 16 относительно ее вершины.
Асферическая поверхность 16 задается уравнением в прямоугольной системе координат oxyz, центр которой о совмещен с вершиной О3 асферической поверхности 16, а ось oz совпадает с ее осью симметрии. На схеме, изображенной на фиг. 1, оси oy и oz лежат в плоскости рисунка; при этом ось oy направлена вверх, а ось oz направлена слева на право. Ось ох лежит в плоскости, перпендикулярной к плоскости рисунка. В связи с этим оси ох и оy лежат в двух взаимно перпендикулярных меридиональных плоскостях. Пусть оси ох, oy и oz образуют правую систему прямоугольных координат. Тогда ось ох, являясь перпендикулярной к плоскости рисунка, будет направлена от наблюдателя. С учетом этих данных узел 5 с маркой М установлен таким образом, чтобы посредством линейной каретки 7 марка М перемещалась параллельно оси oz, посредством линейной каретки 8 - параллельно оси ох, а посредством линейной каретки 9 - параллельно оси oy.
Синтезированный голограммный оптический элемент 12 может быть выполнен на плоскопараллельной, плосковогнутой или же плосковыпуклой подложке с заданной толщиной d1 и показателем преломления n(λ) материала подложки, где λ - длина волны монохроматического источника света. Расчет параметров структуры синтезированных голограмм, отрезков оптической схемы контроля асферической поверхности второго и более высокого порядков, методы и средства для отображения структуры синтезированных голограмм на подложке, а также методы юстировки схем контроля асферических поверхностей рассмотрены в диссертации на соискание ученой степени кандидата технических наук Ларионова Н.П. (см. Ларионов Н.П. Методы и средства контроля формы асферических поверхностей крупногабаритных и светосильных оптических элементов на основе использования осевых синтезированных голограмм. Казань, 2002, с. 40-47, 136-142), а также в материалах на изобретение (см. Ларионов Н.П., Лукин А.В., Мустафин К.С., Рафиков Р.А. Способ настройки устройства для контроля оптических поверхностей. - Патент РФ №729437, бюлл. изобр., 1980, №5).
Марка М содержит два пересекающихся между собой под углом 90° тонких штриха, нанесенных, например, на одной из поверхностей тонкой стеклянной пластины, прозрачной для излучения источника света 1. Толщина штрихов марки М может быть, например, 0.015 мм. Она закреплена в узле 5 таким образом, чтобы плоскость расположения ее штрихов была ориентирована перпендикулярно к направлению смещения марки М, осуществляемого посредством линейной каретки 7 под воздействием привода 23 и блока управления приводами 26. В двух других взаимно перпендикулярных направлениях марка М смещается посредством линейных кареток 8 и 9 под воздействием приводов соответственно 24 и 25 и блока управления приводами 26. При этом марка М закреплена в узле 5 таким образом, чтобы один из ее штрихов был ориентирован параллельно направлению смещения марки М, осуществляемого посредством линейной каретки 8, а другой штрих - параллельно направлению смещения марки М, осуществляемого посредством линейной каретки 9. Величины смещений марки М измеряются посредством датчиков линейных перемещений 27, 28 и 29, закрепленных на линейных каретках 7, 8 и 9 соответственно и подключенных к блоку цифровой индикации 30.
При проведении контроля асферической поверхности 16 оптической детали 17 необходимо провести юстировочные операции, наиболее важные из которых рассмотренные ниже.
Сначала ориентируют в опорной ветви плоское эталонное зеркало 4 перпендикулярно к падающему на него параллельному пучку лучей, распространяющемуся от светоделителя 3. Для чего угловыми наклонами зеркала 4 направляют отраженный от него опорный пучок лучей к светоделителю 3, а затем отраженную от светоделителя 3 часть опорного пучка направляют в афокальную систему 2 и затем в выходное окно лазера 1. Прошедшая светоделитель 3 часть опорного пучка поступает в приемную часть устройства, где после отражения от плоского поворотного зеркала 18 поступает во второй фокусирующий 19 и фокусируется им в точку Ао, служащую в устройстве опорной точкой. Затем эта часть опорного пучка лучей проходит объектив фотоприемного устройства (например, цифровой видеокамеры) 20 и падает на плоскость регистрации 21 светочувствительных элементов фотоприемного устройства (например, цифровой видеокамеры) 20.
Затем юстируют синтезированный голограммный оптический элемент 12. Для этого сначала смещают его перпендикулярно к оптической оси первого фокусирующего объектива 10 и добиваются, чтобы его апертура освещалась осесимметрично падающему на него расходящемуся гомоцентрическому пучку световых лучей, вышедшему из светящейся точки A. После этого смещениями синтезированного голограммного оптического элемента 12 вдоль оптической оси объектива 10 и угловыми поворотами его получают посредством юстировочной голограммы 14 автоколлимационное изображение A'14 светящейся точки A, которое формируется в результате дифракции в обратном направлении лучей, упавших на голограмму 14. Процесс формирования автоколлимационного изображения A'14 контролируют визуально, наблюдая предварительно это изображение на диафрагме 11 в окрестности ее отверстия и добиваясь при этом его минимального размера путем продольного смещения синтезированного голограммного оптического элемента 12. После этого дифрагированный на юстировочной голограмме 14 пучок световых лучей посредством угловых поворотов синтезированного голограммного оптического элемента 12 направляют в отверстие диафрагмы 11, который проходит в обратном направлении первый фокусирующий объектив 10, преобразуясь им в параллельный пучок лучей, затем отражается от светоделителя 3 и поступает в приемную часть, где отражается от плоского поворотного зеркала 18, проходит второй фокусирующий объектив 19, фокусируясь им в точку A''14, проходит объектив фотоприемного устройства (например, цифровой видеокамеры) 20 и падет на плоскость регистрации 21 фотоприемного устройства 20. В результате совмещения пучков световых лучей, пришедших в приемную часть из опорной и объектной ветвей, в плоскости регистрации 21 будет присутствовать интерференционная картина, которая изобразится на экране блока отображения информации (например, монитора) 22 в виде отрезков интерференционных полос, расположенных в кольцевой картине 32. Эти отрезки должны быть прямолинейными и лежать на системе виртуальных прямых полос с постоянным шагом. Если это не выполняется, то необходимо продольными смещениями синтезированного голограммного оптического элемента 12 получить указанное выше расположение отрезков интерференционных полос в кольцевой картине 32. Затем угловыми наклонами синтезированного голограммного оптического элемента 12 необходимо произвести настройку на бесконечно широкую полосу либо на минимальное количество интерференционных полос и контролировать это состояние в кольцевой картине 32 в процессе работы устройства. Это состояние соответствует тому, что юстировочная голограмма 14 действительно формирует автоколлимационное изображение A'14 светящейся точки A, а это означает, что голограмма-компенсатор 13 и синтезированный голограммный оптический элемент 12 установлены на заданном расстоянии s от светящейся точки A. Для такого состояния точка A''14 является сфокусированной в фокальной плоскости второго фокусирующего объектива 19 и практически совмещенной с опорной точкой Ао.
Затем юстируют оптическую деталь 17 с контролируемой асферической поверхности 16. Контроль совмещения оси симметрии асферической поверхности 16 с осью симметрии голограммы-компенсатора 13 (оптической осью) можно вести по виду интерференционных полос в картине 31 на экране блока отображения информации (например, монитора) 22, левая и правая части которой должны быть близки между собой по форме интерференционных полос. Однако этот метод можно использовать только в том случае, когда на контролируемой асферической поверхности 16 отсутствуют большие неосесимметричные дефекты. Более надежным является метод, основанный на визуальном наблюдении изображения точки A''16, которое посредством объектива фотоприемного устройства (например, цифровой видеокамеры) 20 проецируют совместно с изображением опорной точки Aо на плоскость регистрации 21 и наблюдают на экране блока отображения информации (например, монитора) 22. Путем поперечных смещений и угловых поворотов детали 17 добиваются максимально приближенного к осесимметричности изображения точки A''16 и совмещения его с изображением опорной точки Aо, наблюдая их на экране блока отображения информации (например, монитора) 22. Контроль расположения вершины О3 асферической поверхности 16 относительно точки О2 ведут по форме точки A''реп в фокальной плоскости второго фокусирующего объектива 19, изображение которой также отображается на экране блока отображения информации (например, монитора) 22. Точка А''реп образуется пучком световых лучей, сформированным юстировочной голограммой 15 в проходящем свете при освещении ее из светящейся точки A. Этот пучок световых лучей фокусируется в точку Ареп. Он падает на асферическую поверхность 16, отражается от нее, проходит в обратном ходе юстировочную голограмму 15, фокусируясь в точку А'реп в результате дифракции на этой голограмме, затем проходит первый фокусирующий объектив 10 и после отражения от светоделителя 3 и плоского поворотного зеркала 18 фокусируется вторым фокусирующим объективом 19 в точку А''реп. Путем продольного смещения детали 17 получают минимальное изображение точки A''реп на экране блока отображения информации (например, монитора) 22, что соответствует тому, что точка Ареп будет расположена на асферической поверхности 16 и совпадать с ее вершиной - точкой О3, которая будет находиться на расстоянии d2 от точки O2 на задней поверхности подложки синтезированного голограммного оптического элемента 12. После проведения рассмотренных юстировочных операций детали 17 фокусировкой объектива фотоприемного устройства (например, цифровой видеокамеры) 20 более тщательно проецируют изображение асферической поверхности 16 оптической детали 17 на плоскость регистрации 21, что визуально контролируют по резкости изображения на экране блока отображения информации (например, монитора) 22 небольшой метки, нанесенной для этого временно на асферическую поверхность 16, либо небольшой фрагмент тонкой бумаги, приклеенный также временно к асферической поверхности 16. Затем нанесенную метку или фрагмент тонкой бумаги удаляют.
Далее юстируют марку М. Сначала ее посредством механизма угловых поворотов 6 узла 5 ориентируют так, чтобы плоскость расположения ее штрихов была перпендикулярна к параллельному пучку световых лучей, вышедших из афокальной системы 2 и прошедших светоделитель 3. Контроль такой установки марки М осуществляют с помощью дополнительного вспомогательного плоского зеркала, которое прислоняют отражающим покрытием к оправе марки М со стороны, обращенной к первому фокусирующему объективу 10. Посредством механизма угловых поворотов 6 направляют отраженный от дополнительного вспомогательного плоского зеркала параллельный пучок световых лучей в афокальную систему 2, а затем вышедший из нее узкий пучок лучей - в выходное окно лазера 1. После этого совмещают плоскость расположения штрихов марки М с плоскостью промежуточного изображения ППИ. Для этого осуществляют продольное смещение марки М по ходу падающего на нее параллельного пучка световых лучей посредством линейной каретки 7, приводящейся в движение посредством привода 23 и блока управления приводами 26. Момент совмещения плоскости расположения штрихов марки М с плоскостью ППИ контролируют по возникновению резкого изображения штрихов ИШм марки М на экране блока отображения информации (например, монитора) 22.
После проведения рассмотренных выше операций по юстировке устройства получают на экране блока отображения информации (например, монитора) 22 интерференционные полосы путем поворота детали 17 вокруг, например, оси ох и приступают к анализу интерференционной картины 31 с целью выявления дефектов на контролируемой асферической поверхности 16 оптической детали 17 и выбору из них наиболее характерных, которым соответствуют наибольшие дефекты и которые необходимо устранить в первую очередь. Затем определяют положения этих характерных точек с дефектами на контролируемой асферической поверхности 16 относительно ее вершины. Для этого предварительно выводят точку пересечения двух штрихов марки М на оптическую ось и тем самым совмещают ее с точкой, в которой должна располагаться точка O'3, оптически сопряженная с вершиной О3 асферической поверхности 16. Осуществляют это совмещение путем перемещения марки М в плоскости промежуточного изображения ППИ в двух взаимно перпендикулярных направлениях с помощью линейных кареток 8 и 9 под воздействием приводов 24 и 25 и блока управления приводами 26. Контроль вывода на оптическую ось точки пересечения двух штрихов марки М ведут, наблюдая, например, в лупу со стороны асферической поверхности 16 совмещение точки пересечения их теней со светящейся точкой-репером Ареп, расположенной на оптической оси. (Для проведения этой операции деталь 17 временно выводится из схемы контроля, а затем возвращается обратно.) Показания для датчиков линейных перемещений 28 и 29 на блоке цифровой индикации 30, полученные при проведении этой операции, служат началом отсчета при измерении величин смещений марки М в плоскости ППИ от оптической оси, т.е. от точки O'3. Поэтому их можно обнулить. После проведения этой операции точка пересечения изображений штрихов в ИШм марки М, наблюдаемая на экране блока отображения информации (например, монитора) 22, будет визуализировать положение точки O''3.
После вывода точки пересечения двух штрихов марки М на оптическую ось проводят смещения марки М в плоскости ППИ в двух взаимно перпендикулярных направлениях посредством линейных кареток 8 и 9 и при этом наблюдают на экране блока отображения информации (например, монитора) 22 смещения изображения штрихов ИШм марки М. Осуществляют в результате этих смещений марки М совмещение точки пересечения изображений ее штрихов с искривлениями интерференционных полос в картине 31, изображаемой на экране блока отображения информации (например, монитора) 22. Для положений тех искривлений интерференционных полос, которые соответствуют выбранным характерным точкам на контролируемой асферической поверхности 16, снимают показания для датчиков линейных перемещений 28 и 29 на блоке цифровой индикации 30, значения которых отображают величины смещений марки М в плоскости ППИ в двух взаимно перпендикулярных направлениях от оптической оси. Поскольку промежуточная плоскость ППИ, оптически сопряженная с асферической поверхностью 16, по своей физической природе перпендикулярна к оптической оси, а смещение марки М линейными каретками 8 и 9 осуществляется параллельно соответственно оси ox и оси оy прямоугольной системы координат oxyz, то величины смещений марки М в плоскости ППИ можно выразить через координаты прямоугольной системы координат o'x'y'z', центр о' которой расположен на оптической оси и совмещен с точкой O'3, ось o'z' совмещена с осью oz системы координат oxyz, а оси o'x' и о'у' лежат в плоскости ППИ, параллельны соответственно осям ох и оy системы координат oxyz и направлены с ними в одну сторону. В связи с этим прямоугольная система координат o'x'y'z' также является правой.
Таким образом, для каждой выбранной характерной точки i на асферической поверхности 16 оптической детали 17 будут измерены координаты (х'ппи i, y'ппи i) соответствующей ей точки в плоскости промежуточного изображения ППИ, оптически сопряженной с асферической поверхностью 16. Эти координаты являются координатами промежуточного изображения асферической поверхности 16 оптической детали 17, расположенного в плоскости ППИ, которое сформировано в обратном ходе лучей, отраженных от асферической поверхности 16, посредством синтезированной голограммы-компенсатора 13 и первого фокусирующего объектива 10. По измеренным координатам (x'ппи i, y'ппи i) находят координаты (xап i, yaп i) выбранной характерной точки i на контролируемой асферической поверхности 16. Для осуществления этой операции необходимо установить связь между координатами точек асферической поверхности 16 оптической детали 17 с координатами соответствующих им точек в плоскости ППИ.
Поскольку асферическая поверхность 16 является осесимметричной, то связь абсциссы хап i для точки i на асферической поверхности 16 с абсциссой х'ппи i соответствующей ей точки в плоскости ППИ будет аналогичной связи ординаты yап i на асферической поверхности 16 с ординатой у'ппи i в плоскости ППИ. Поэтому достаточно эту связь установить для ординат yап i и y'ппи i. На оптической схеме, изображенной на фиг. 1, показан ход крайнего луча GABE, вышедшего из афокальной системы 2 и прошедшего через точку G в плоскости ППИ, через точку A - фокус первого фокусирующего объектива 10, через точку B на краю голограммы-компенсатора 13 и упавшего в точку E в краевой зоне асферической поверхности 16 оптической детали 17. В области хода этого луча между первым фокусирующим объективом 10 и синтезированной голограммой-компенсатором 13 справедливо соотношение

где y'ппи g - ордината точки G в плоскости ППИ, hгк е - высота, на которой луч в точке B падает на голограмму-компенсатор 13. На основании этого равенства можно записать аналогичное соотношение для ординаты y'ппи i точки i в плоскости ППИ, связанной с соответствующей ей точкой на голограмме-компенсаторе 13

где hгк i - высота точки падения на голограмму-компенсатор 13 луча, проходящего в плоскости ППИ через точку с ординатой y'ппи i. После дифракции на голограмме 13 он будет падать на асферическую поверхность 16 в точке с ординатой yaп i. Для определения этой ординаты можно использовать данные, полученные для случая расчета хода лучей от асферической поверхности 16 вдоль ее нормалей к голограмме-компенсатору 13. Для этого задают ряд точек, расположенных на профиле асферической поверхности 16 от ее вершины O3 до края светового диаметра оптической детали 17 с заданным интервалом Δy изменения ординаты y точек этого ряда, и находят с помощью известных программ для расчета оптических систем (например, OPAL, DEMOS, ZEMAX) для каждого нарастающего от 0 значения ординаты yап n = yап n-1 + Δy величины высот hгк n на голограмме-компенсаторе 13. Затем по формуле (3) для каждой высоты hгк n находят ординату y'ппи n в плоскости ППИ. Полученные расчетные данные сводят в таблицу вида Таблица 1. При контроле асферической поверхности в процессе анализа этой таблицы находят в четвертом столбце наиболее близкое значение y'ппи n к измеренному y'ппи i и определяют во втором столбце соответствующее ему значение yап n, которое принимают за ординату yaп i на асферической поверхности 16. Очевидно, что погрешность найденного таким образом значения yап i не превышает половины ширины выбранного шага Δy изменения ординаты y асферической поверхности 16. Отсюда следует, что погрешность определения ординаты yап i тем меньше, чем меньше выбранный шаг Δy изменения ординаты y при расчете значений для столбцов Таблицы 1. (По этой же таблице можно определять и значения абсцисс хап i дефектов на асферической поверхности по измеренным абсциссам х'пп i в плоскости ППИ.
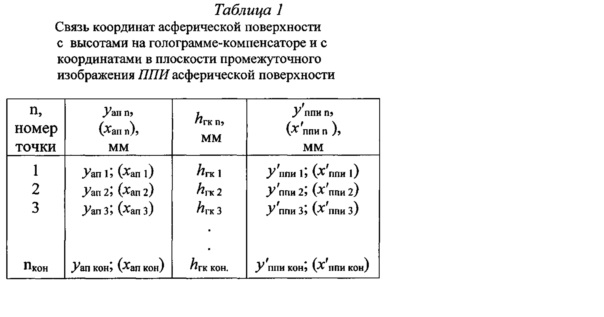
Поэтому в столбцах этой таблицы в круглых скобках приведены и выражения для абсцисс выбранных точек на профиле заданной асферической поверхности.) На практике для Δy можно задавать значение меньше 1 мм; поэтому погрешность определения ординаты yап i дефекта на асферической поверхности 16 будет составлять доли миллиметра. Поскольку в предложенном устройстве могут быть использованы высокоточные датчики линейных перемещений марки М, а шаг Δy при расчете значений Таблицы 1 может быть выбран достаточно маленьким (десятую долю миллиметра и даже меньше), то предложенное устройство действительно может обеспечить повышение точности контроля положений дефектов на асферических поверхностях. Кроме того, данное устройство обеспечивает повышение точности контроля положений дефектов на асферических поверхностях благодаря исключению влияния дисторсии, вносимой синтезированной голограммой-компенсатором. Это достигается за счет того, что при контроле асферической поверхности сначала измеряются координаты дефектов в искаженном дисторсией промежуточном изображении асферической поверхности с помощью марки М, а затем по Таблице 1 находятся истинные (свободные от дисторсии) координаты дефектов на асферической поверхности.
Предлагаемое устройство (см. фиг. 2) для определения положений дефектов на асферической поверхности оптической детали работает следующим образом. Пучок световых лучей от монохроматического (лазерного) источника света 1 поступает в афокальную систему 2 и преобразуется ею в расширенный параллельный пучок лучей, который проходит первую марку M1, поступает в светоделитель 3, где частично проходит его и частично отражается им. Отраженная часть пучка лучей поступает в опорную ветвь устройства падает на плоское эталонное зеркало 4, ориентированное перпендикулярно к лучам этого пучка, отражается от него и в автоколлимационном ходе частично отражается от светоделителя 3 и частично проходит его. Отраженная часть опорного пучка лучей проходит в обратном направлении первую марку M1, афокальную систему 2 и падает в отверстие выходного окна источника света 1, а прошедшая светоделитель 3 часть опорного пучка лучей поступает в приемную часть где отражается от плоского поворотного зеркала 18, проходит вторую марку М2 и поступает во второй фокусирующий объектив 19, которым фокусируется в точку Аo, служащую в устройстве опорной точкой. Затем эта часть опорного пучка лучей проходит объектив фотоприемного устройства (например, цифровой видеокамеры) 20 и падает на плоскость регистрации 21 светочувствительных элементов фотоприемного устройства (например, цифровой видеокамеры) 20.
В объектную ветвь устройства поступает прошедшая светоделитель 3 часть параллельного пучка лучей, вышедшего из афокальной системы 2 и прошедшего первую марку M1. Поступивший в объектную ветвь пучок лучей проходит первый фокусирующий объектив 10, преобразуясь им в сходящийся гомоцентрический пучок световых лучей с центром в виде светящейся точки A в заднем фокусе объектива 10, проходит диафрагму 11, расположенную в задней фокальной плоскости объектива 10, и падает на синтезированный голограммный оптический элемент 12 в виде расходящегося гомоцентрического пучка световых лучей, освещая голограмму-компенсатор 13 и юстировочные голограммы 14 и 15. Голограмма-компенсатор 13 в процессе дифракции на ней световых лучей в проходящем свете формирует осесимметричный пучок световых лучей, каждый луч которого падает на асферической поверхности 16 оптической детали 17 по соответствующей ему определенной нормали этой поверхности и отражается от нее в обратном направлении. В этом случае отражающая асферическая поверхность 16 оптической детали 17 выступает в качестве предмета. Отраженный от этой асферической поверхности 16 пучок световых лучей в автоколлимационном ходе распространяется к голограмме-компенсатору 13 и в результате дифракции на ней фокусируется в точку A'16, которая является автоколлимационным изображением светящейся точки A. Затем этот пучок лучей проходит в обратном направлении диафрагму 11 и преобразуется первым фокусирующим объективом 10 в параллельный пучок лучей, который светоделителем 3 делится на два пучка лучей. Один из них (прошедший светоделитель 3) проходит первую марку M1, афокальную систему 2 и поступает в отверстие выходного окна монохроматического источника света 1. Другой пучок лучей (отраженный от светоделителя 3) поступает в приемную часть, где отражается от плоского поворотного зеркала 18, проходит вторую марку М2, проходит второй фокусирующий объектив 19, фокусируясь им в точку A''16, проходит объектив фотоприемного устройства (например, цифровой видеокамеры) 20 и падает на плоскость регистрации 21 светочувствительных элементов фотоприемного устройства (например, цифровой видеокамеры) 20. В ходе каждого из этих двух пучков лучей посредством синтезированной голограммы-компенсатора 13 и первого фокусирующего объектива 10 формируется промежуточное изображение асферической поверхности 16 оптической детали 17. Таким образом, в данном устройстве присутствуют два промежуточных изображения асферической поверхности 16 оптической детали 17, одно из которых расположено между афокальной системой 2 и светоделителем 3 и ему соответствует плоскость промежуточного изображения ППИ1, а другое - в приемной части между плоским поворотным зеркалом 18 и вторым фокусирующим объективом 19. Ему соответствует плоскость промежуточного изображения ППИ2. При этом как в плоскости ППИ1, так и в плоскости ППИ2 формируется обратное изображение асферической поверхности 16 оптической детали 17. Плоскости ППИ1 и ППИ2 являются оптически сопряженными с асферической поверхностью 16 оптической детали 17. В связи с этим точка O'3 1 в плоскости промежуточного изображения ППИ1, лежащая в центре промежуточного изображения асферической поверхности 16 оптической детали 17 и соответственно на оптической оси, является оптически сопряженной с вершиной О3 асферической поверхности 16 оптической детали 17 и является ее изображением. Точка G1, лежащая в плоскости промежуточного изображения ППИ1, является оптически сопряженной с точкой E, расположенной вблизи границы асферической поверхности 16 оптической детали 17, и является ее изображением. Точно так же точки O'3 2 и G2 в плоскости промежуточного изображения ППИ2 являются оптически сопряженными соответственно с точками О3 и E асферической поверхности 16 и являются их изображениями. С плоскостями промежуточных изображений ППИ1 и ППИ2 совмещены плоскости расположения штрихов марок соответственно M1 и М2. Очевидно, что в этом случае в плоскостях ППИ1 и ППИ2 в обратном ходе лучей от асферической поверхности 16 оптической детали 17 будут формироваться изображения первой марки M1. Таким образом, в плоскости промежуточного изображения ППИ2 расположены вторая марка М2 и изображение первой марки M1.
Посредством второго фокусирующего объектива 19 и объектива фотоприемного устройства (например, цифровой видеокамеры) 20 в плоскость регистрации 21 фотоприемного устройства (например, цифровой видеокамеры) 20 проецируется сформированное в плоскости ППИ2 обратное промежуточное изображение асферической поверхности 16 оптической детали 17. В результате этого в плоскости регистрации 21 формируется конечное изображение асферической поверхности 16 оптической детали 17, которое является прямым. В эту же плоскость регистрации 21 проецируются также изображения штрихов марок M1 и М2. В результате совмещения в приемной части пучков световых лучей, пришедших из опорной и объектной ветвей, и возникшей в связи с этим интерференции соответствующих им световых волн, образуется интерференционная картина для контролируемой асферической поверхности 16 оптической детали 17, которая также отображается в плоскости регистрации 21. Конечное изображение асферической поверхности 16 оптической детали 17 вместе с изображением этой интерференционной картины, а также изображениями штрихов марок M1 и М2 передаются фотоприемным устройством (например, цифровой видеокамерой) 20 на экран блока отображения информации (например, монитора) 21, где 31 - конечное изображение асферической поверхности 16 оптической детали 17 с соответствующей ей интерференционной картиной, ИШм1 и ИШм2 - изображения штрихов марок соответственно M1 и М2. На экране блока отображения информации (например, монитора) 22 изображена точка O''3, расположенная в центре изображения 31 асферической поверхности 16 и интерференционной картины для этой поверхности. В связи с этим она соответствует точке O'3 1 в плоскости промежуточного изображения ППИ1, точке O'3 2 в плоскости промежуточного изображения ППИ2 асферической поверхности 16 оптической детали 17 и точке O3 - вершине асферической поверхности 16 оптической детали 17. На экране блока отображения информации (например, монитора) 22 изображена интерференционная картина в виде отрезков интерференционных полос в кольцевой зоне 32, окружающей интерференционную картину 31. Она соответствует юстировочной автоколлимационной голограмме 14, предназначенной для контроля установки синтезированного голограммного оптического элемента 12 относительно светящейся точки A.
Для того чтобы было удобно и наглядно идентифицировать дефекты и определять их расположения на контролируемой асферической поверхности 16, необходимо, чтобы на экране блока отображения информации (например, монитора) 22 было сформировано прямое изображение асферической поверхности 16 оптической детали 17. Для этого необходимо корпус фотоприемного устройства (например, цифровой видеокамеры) 20 повернуть на 180° вокруг его оптической оси относительно исходного рабочего положения фотоприемного устройства (например, цифровой видеокамеры) 20.
Наличие дефектов на контролируемой асферической поверхности 16 оптической детали 17 определяют путем визуального анализа интерференционной картины, присутствующей на конечном изображении 31 этой асферической поверхности 16 на экране блока отображения информации (например, монитора) 22. Дефекты и их положения на контролируемой асферической поверхности 16 визуализируются искривлениями полос в этой интерференционной картине. По искривлениям интерференционных полос выбирают на контролируемой асферической поверхности 16 характерные точки, которым соответствуют наибольшие дефекты и которые необходимо устранить в первую очередь. Затем определяют положения этих характерных точек с дефектами на контролируемой асферической поверхности 16 относительно ее вершины подобно тому, как это осуществляется при использовании варианта устройства, оптическая схема которого изображена на фиг. 1. При этом визуализацию положения точки O''3 на экране блока отображения информации (например, монитора) 22 осуществляют с помощью изображения штрихов ИШм1 марки M1. Для этого перемещают марку M1 в плоскости промежуточного изображения ППИ1 асферической поверхности 16 посредством линейных кареток 8 и 9 и совмещают точку пересечения теней двух ее штрихов со светящейся точкой-репером Ареп. Контроль вывода на оптическую ось точки пересечения двух штрихов марки M1 ведут, наблюдая, например, в лупу со стороны асферической поверхности 16 совмещение точки пересечения их теней со светящейся точкой-репером Ареп, расположенной на оптической оси. (Для проведения этой операции деталь 17 временно выводится из схемы контроля, а затем возвращается обратно.) Для этого положения марки M1 точка пересечения изображений ее штрихов на экране блока отображения информации (например, монитора) 22 будет совмещена с точкой O''3. Затем перемещают марку М2 в плоскости промежуточного изображения ППИ2 асферической поверхности 16 посредством линейных кареток 36 и 37 и совмещают на экране блока отображения информации (например, монитора) 22 изображение ее штрихов ИШм2 с изображением штрихов ИШм1 первой марки M1. После этого обнуляют на блоках цифровой индикации 30 и 45 показания для координат x'ппи i и y'ппи i и приступают к измерению координат характерных точек на асферической поверхности 16 подобно тому, как это рассмотрено выше для устройства, оптическая схема которого изображена на фиг. 1.
При контроле асферических поверхностей, у которых на стадиях формообразования присутствуют только осесимметричные дефекты, достаточно измерять с помощью предложенного устройства одну из координат дефектов: x или y в зависимости от того, как ориентированы интерференционные полосы на асферической поверхности: вдоль оси ох или оси oy правой прямоугольной системы координат oxyz, центр о которой расположен в вершине O3 асферической поверхности 16, а ось oz совпадает с осью симметрии асферической поверхности 16 (см. фиг. 1, фиг. 2).
Работоспособность предложенного устройства проверялась на примере варианта устройства с принципиальной оптической схемой, изображенной на фиг. 2. Ниже приведены результаты контроля предложенным устройством асферической поверхности, на которой в процессе ее формообразования присутствовали только осесимметричные дефекты. Уравнение этой асферической поверхности имеет вид: z=0.036643y2/(1+(1+0.000331y2)½). Радиус кривизны R0 при вершине данной асферической поверхности равен 27.29 мм, а ее коническая постоянная K равна -1.246446. Полный и световой диаметры оптической детали с этой асферической поверхностью равны соответственно 32 и 30 мм. При проведении контроля данной асферической поверхности в предложенном устройстве (фиг. 2) в качестве источника света использовался лазер с излучением на длине волны λ, равной 0.6328 мкм, а в качестве приводов и датчиков линейных перемещений и блоков цифровой индикации применялись микрометрические винты со шкалами с ценой деления шкалы для точного отсчета, равной 0.01 мм.
На фиг. 3 и фиг. 4 приведены наблюдаемые на экране блока отображения информации (например, монитора) 22 и зарегистрированные фотоприемным устройством (например, цифровой видеокамерой) 20 изображения 31 асферической поверхности 16 вместе с интерференционной картиной, полученные при контроле указанной выше асферической поверхности. Кроме этого, на фиг. 3 и фиг. 4 присутствуют изображения интерференционной картины в виде отрезков интерференционных полос в кольцевой зоне 32, которая соответствует автоколлимационной юстировочной голограмме 14, а также изображения штрихов ИШм1 и ИШм2 марок соответственно M1 и М2.
На фиг. 3 изображение 31 контролируемой асферической поверхности 16 вместе с интерференционной картиной зарегистрировано на начальной стадии, а на фиг. 4 - на финишной стадии полировки этой асферической поверхности. Интерференционные полосы в данных интерференционных картинах получены путем поворота контролируемой детали 17 вокруг оси ох правой системы прямоугольных координат oxyz (см. фиг. 2), в которой записано уравнение контролируемой асферической поверхности 16. При этом поворот детали 17 выбран таким, чтобы направление искривления интерференционных полос вверх на этих интерференционных картинах соответствовало направлению в сторону вершин бугров у дефектов, расположенных на контролируемой асферической поверхности 16. Указанная настройка интерференционной картины контролировалась визуально на экране блока отображения информации (например, монитора) 22, где, как отмечалось выше, было получено прямое изображение 31 асферической поверхности 16 вместе с интерференционной картиной.
На фиг. 3 и фиг. 4 показано, что изображения штрихов в ИШм1 и ИШм2 каждой марки М1 и М2 пересекаются между собой под углом 90°. При этом изображения штрихов данных марок, направленные слева направо, параллельны друг другу и совпадают между собой. Марка M1 в данном варианте предложенного устройства (см. фиг. 2) расположена между афокальной системой 2 и светоделителем 3 и совмещена с плоскостью промежуточного изображения ППИ1, в которой она установлена таким образом, что точка пересечения ее штрихов выведена на оптическую ось и совмещена с точкой O'3 1, оптически сопряженной с вершиной O3 контролируемой асферической поверхности 16. В этом случае точка пересечения изображений штрихов в ИШм1 будет совмещена с точкой O''3, расположенной на экране блока отображения информации (например, монитора) 22 и оптически сопряженной с вершиной О3 контролируемой асферической поверхности 16. Поэтому точка пересечения изображений штрихов в ИШм1 на фиг. 3 и фиг. 4 расположена в центре изображения 31 контролируемой асферической поверхности 16 вместе с интерференционной картиной. Поэтому она используется в данном конкретном случае (когда на контролируемой асферической поверхности 16 присутствуют осесимметричные погрешности) только для визуализации положения этого центра с целью контроля вывода на оптическую ось точки пересечения штрихов марки М2, которая расположена в приемной части предложенного устройства (см. фиг. 2) между плоским поворотным зеркалом 18 и вторым фокусирующим объективом 19. При этом плоскость расположения штрихов марки М2 совмещена с плоскостью промежуточного изображения ППИ2 контролируемой асферической поверхности 16. В этой плоскости расположены оси o'x' и o'y' правой прямоугольной системы координат o'x'y'z', начало координат о' которой расположено на оптической оси и совмещено с точкой O'3 2, оптически сопряженной с вершиной О3 асферической поверхности 16, а ось o'x' перпендикулярна к плоскости рисунка, изображенного на фиг. 2. С помощью марки М2 осуществляется определение положений дефектов на контролируемой асферической поверхности 16. Для этого предварительно точка пересечения штрихов марки М2 выводится на оптическую ось в приемной части предложенного устройства путем перемещения ее в плоскости промежуточного изображения ППИ2 посредством линейной каретки 36 вдоль оси o'x', а посредством линейной каретки 37 - вдоль оси o'y'. Контролируют это состояние по совмещению между собой изображений штрихов ИШм1 и ИШм2 марок M1 и М2 на экране блока отображения информации (например, монитора) 22. Значения на шкалах микровинтов линейных кареток 36 и 37 для этого состояния служат началом отсчета при измерении величин смещений марки М2 от оптической оси в плоскости промежуточного изображения ППИ2 при определении положений дефектов на асферической поверхности 16. Поскольку на контролируемой асферической поверхности 16 присутствовали только осесимметричные дефекты, то с помощью марки М2 контролировались положения дна для каждой выбранной (характерной) ямы и положения вершин характерных бугров присутствующих на асферической поверхности дефектов. Для этого она посредством линейной каретки 36 перемещалась вдоль оси o'x' (фиг. 2) до совмещения точки пересечения ее штрихов с точкой, соответствующей в плоскости промежуточного изображения ППИ2 дну каждой выбранной ямы и вершине каждого выбранного бугра. Эти совмещения контролировались визуально на экране блока отображения информации (например, монитора) 22 по совмещению точки пересечения изображений штрихов в ИШм2 марки М2 с визуализированным интерференционной картиной дном каждой выбранной ямы и вершиной каждого выбранного бугра (см. фиг. 3 и фиг. 4). Для каждого положения марки М2 в процессе совмещения точки пересечения ее штрихов с точкой, соответствующей в плоскости ППИ2 дну выбранной ямы и вершине выбранного бугра, снимались отсчеты по шкале микрометрического винта, по которым затем определялись величины смещений марки М2 от оптической оси, т.е. от начала координат o'. Таким образом, измеренные величины смещений марки М2 являются координатами x' точек в плоскости промежуточного изображения ППИ2, соответствующими координатам x положений дна каждой выбранной ямы и вершины каждого выбранного бугра на контролируемой асферической поверхности 16. Далее по найденным координатам x' находились координаты x положений дна каждой выбранной ямы и вершины каждого выбранного бугра с использованием рассчитанной для этого Таблицы 2, аналогичной Таблице 1. Шаг Δх изменения координаты x на профиле контролируемой асферической поверхности при расчете Таблицы 2 был выбран равным 0.2 мм.
На фиг. 3(а) и фиг. 3(в) точка пересечения изображений штрихов в ИШм2 расположена в зоне визуализированного интерференционной картиной дна каждой из присутствующих на асферической поверхности двух ям. Им соответствуют значения измеренных координат x' в плоскости промежуточного изображения ППИ2, равные -1.02 и - 4.23 мм. По этим данным с помощью Таблицы 2 были определены значения координат x соответствующих им точек на контролируемой асферической поверхности, которые равны: 3.20 и 13.50 мм.
На фиг. 3(б) и фиг. 3(г) точка пересечения изображений штрихов в ИШм2 расположена на визуализированных интерференционной картиной вершинах двух бугров. Им соответствуют значения измеренных координат x' в плоскости промежуточного изображения ППИ2, равные - 3.17 и - 4.67 мм. По этим данным с помощью Таблицы 2 были определены значения координат x соответствующих им точек на контролируемой асферической поверхности, которые равны 10.00 и 14.80 мм.
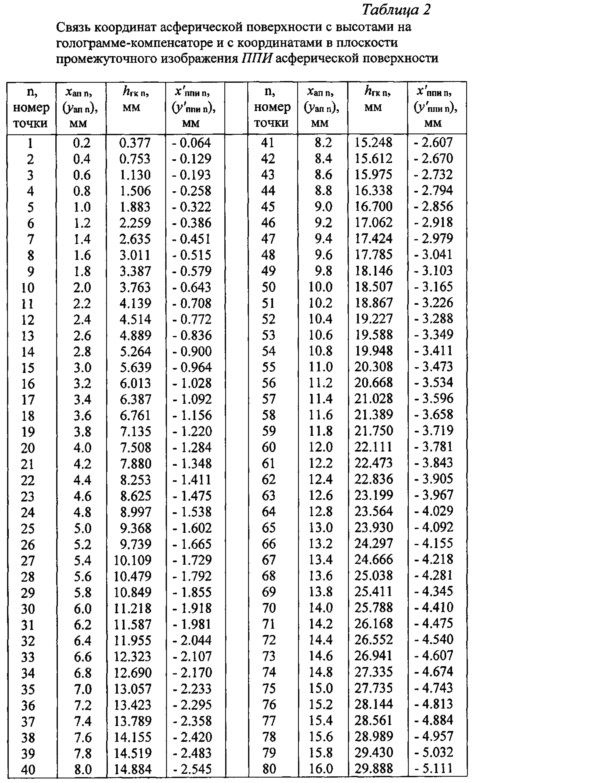
На фиг. 4(а), фиг. 4(в) и фиг. 4(д) точка пересечения изображений штрихов в ИШм2 расположена на визуализированных интерференционной картиной вершинах трех бугров. Им соответствуют значения измеренных координат х' в плоскости промежуточного изображения ППИ2, равные - 0.62, - 3.61 и - 4.77 мм. По этим данным с помощью Таблицы 2 были определены значения координат х соответствующих им точек на контролируемой асферической поверхности, которые равны 1.95, 11.45 и 15.10 мм.
На фиг. 4(б) и фиг. 4(г) точка пересечения изображений штрихов в ИШм2 расположена в зоне визуализированного интерференционной картиной дна каждой из присутствующих на асферической поверхности двух ям. Им соответствуют значения измеренных координат х' в плоскости промежуточного изображения ППИ2, равные - 2.98 и - 3.88 мм. По этим данным с помощью Таблицы 2 были определены значения координат х соответствующих им точек на контролируемой асферической поверхности, которые равны 9.40 и 12.25 мм.
Как указано выше на фиг. 4(д), положению точки пересечения изображений штрихов в ИШм2 соответствует на контролируемой асферической поверхности 16 точка с координатой х, равной 15.10 мм. Это означает, что рабочая зона асферической поверхности 16 полностью раскрыта, т.к. световой диаметр оптической детали 17 равен 30 мм.
Из приведенных экспериментальных данных следует, что координаты дефектов на контролируемой асферической поверхности определены с точностью до сотых долей миллиметра. Как сказано выше, эту точность можно повысить за счет использования высокоточных датчиков линейного перемещения для линейных кареток, а также путем уменьшения шага Δy (или Δx) изменения координаты y (или x) при расчете Таблицы 1. Кроме того, дополнительный вклад в повышение точности определения координат дефектов на асферической поверхности предложенным устройством обеспечивается благодаря исключению влияния дисторсии синтезированной голограммы-компенсатора на процесс определения этих координат.
В связи с тем, что синтезированная голограмма-компенсатор, используемая в предложенном устройстве, может быть изготовлена для контроля асферических поверхностей как второго, так и более высокого порядка (см. Ларионов Н.П. Методы и средства контроля формы асферических поверхностей крупногабаритных и светосильных оптических элементов на основе использования осевых синтезированных голограмм. Казань, 2002, с. 40-45 - диссертация на соискание ученой степени кандидата технических наук), то на основании приведенных выше данных следует, что предложенное устройство позволяет обеспечить контроль таких поверхностей с высокой точностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕРФЕРОМЕТР ДЛЯ КОНТРОЛЯ АСФЕРИЧЕСКИХ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА | 2009 |
|
RU2396513C1 |
| УСТРОЙСТВО ЮСТИРОВКИ ДВУХЗЕРКАЛЬНОЙ ЦЕНТРИРОВАННОЙ ОПТИЧЕСКОЙ СИСТЕМЫ | 2011 |
|
RU2467286C1 |
| Интерферометр для контроля формы оптических поверхностей | 1980 |
|
SU996857A1 |
| ГОЛОГРАФИЧЕСКОЕ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ФОРМЫ КРУПНОГАБАРИТНЫХ ВОГНУТЫХ АСФЕРИЧЕСКИХ ОПТИЧЕСКИХ ПОВЕРХНОСТЕЙ | 2021 |
|
RU2766851C1 |
| ГОЛОГРАФИЧЕСКОЕ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ФОРМЫ АСФЕРИЧЕСКИХ ОПТИЧЕСКИХ ПОВЕРХНОСТЕЙ | 2022 |
|
RU2786688C1 |
| ИНТЕРФЕРОМЕТР ДЛЯ КОНТРОЛЯ ТЕЛЕСКОПИЧЕСКИХ СИСТЕМ И ОБЪЕКТИВОВ | 2012 |
|
RU2518844C1 |
| Устройство для контроля поверхностей | 1990 |
|
SU1770738A1 |
| Голографический микроскоп | 1986 |
|
SU1314295A1 |
| СПОСОБ ГОЛОГРАФИЧЕСКОЙ ЗАПИСИ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2155982C2 |
| Интерферометр для контроля качества поверхностей оптических деталей | 1990 |
|
SU1791701A1 |
Изобретение относится к контрольно-измерительной технике и направлено на повышение точности определения положений дефектов на асферических поверхностях как второго, так и более высокого порядка в процессе их формообразования. Устройство содержит монохроматический источник света, афокальную систему, светоделитель для формирования опорной и объектной ветвей и приемной части. В объектной ветви установлены первый фокусирующий объектив с диафрагмой в его задней фокальной плоскости, синтезированный голограммный оптический элемент, состоящий из осевой синтезированной голограммы-компенсатора и двух соосных с ней юстировочных голограмм, в опорной ветви установлено плоское эталонное зеркало перпендикулярно к лучам, распространяющимся от светоделителя, в приемной части последовательно установлены поворотное плоское зеркало, второй фокусирующий объектив, фотоприемное устройство и блок отображения информации. При этом в одном варианте устройства дополнительно присутствует одна марка с двумя пересекающимися между собой штрихами, установленная между светоделителем и первым фокусирующим объективом и совмещенная с промежуточным изображением асферической поверхности оптической детали, в другом варианте устройства присутствуют две марки, содержащие каждая по два пересекающихся между собою штриха, одна из которых расположена между афокальной системой и светоделителем и совмещена с промежуточным изображением асферической поверхности, а вторая марка расположена в приемной части между плоским поворотным зеркалом и вторым фокусирующим объективом и совмещена с промежуточным изображением асферической поверхности оптической детали. Технический результат - повышение точности определения положений дефектов на асферической поверхности оптической детали. 2 н. и 2 з.п. ф-лы, 4 ил., 2 табл.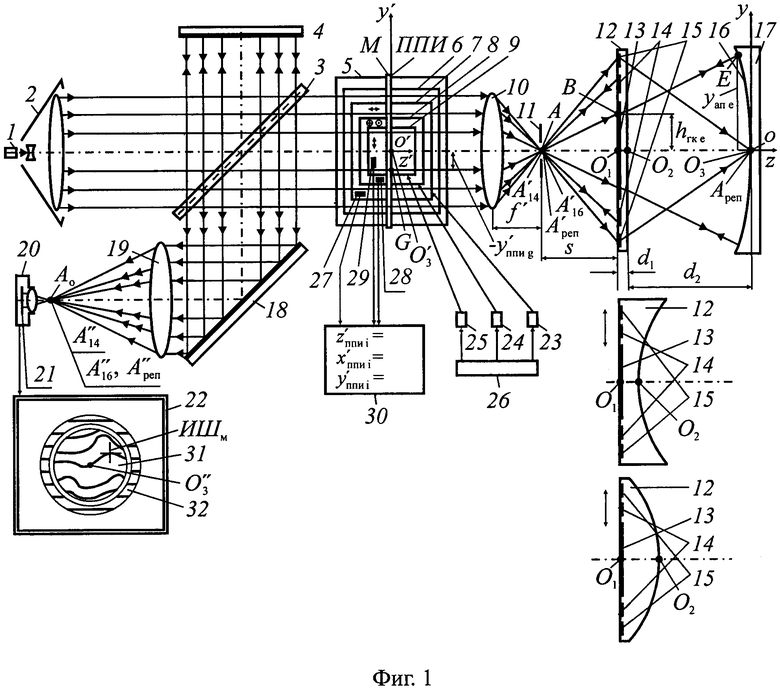
1. Устройство для определения положений дефектов на асферической поверхности оптической детали, содержащее монохроматический источник света и последовательно установленные по ходу световых лучей афокальную систему, светоделитель для формирования опорной и объектной ветвей и приемной части, установленные в объектной ветви по ходу световых лучей, распространяющихся от светоделителя, первый фокусирующий объектив для формирования сходящегося гомоцентрического пучка световых лучей со светящейся точкой в его заднем фокусе, синтезированный голограммный оптический элемент, состоящий из трех осевых соосных между собой синтезированных голограмм, одна из которых является голограммой-компенсатором, а две другие голограммы являются юстировочными, плоское эталонное зеркало, установленное в опорной ветви перпендикулярно к световым лучам, распространяющимся от светоделителя, установленные в приемной части по ходу световых лучей, распространяющихся от светоделителя, второй фокусирующий объектив, фотоприемное устройство и блок отображения информации, отличающееся тем, что устройство дополнительно содержит марку с двумя пересекающимися между собой штрихами, расположенную между светоделителем и первым фокусирующим объективом и совмещенную с промежуточным изображением асферической поверхности оптической детали, при этом марка закреплена в узле, снабженном механизмом угловых поворотов для угловой ориентации марки и тремя линейными каретками для выполнения возможности смещения марки в трех взаимно перпендикулярных направлениях, одно из которых перпендикулярно к плоскости расположения ее штрихов, для чего каждая линейная каретка снабжена приводом, подключенным к блоку управления приводами, для обеспечения возможности измерения величины смещения марки каждая линейная каретка снабжена датчиком линейного перемещения, подключенным на вход блока цифровой индикации, в приемной части по ходу световых лучей после светоделителя установлено плоское поворотное зеркало, в задней фокальной плоскости первого фокусирующего объектива установлена диафрагма.
2. Устройство для определения положений дефектов на асферической поверхности оптической детали по п. 1, отличающееся тем, что оба штриха марки пересекаются друг с другом под углом 90 градусов и каждый из них ориентирован параллельно одному из двух направлений смещения марки, параллельных плоскости расположения пересекающихся между собой двух штрихов.
3. Устройство для определения положений дефектов на асферической поверхности оптической детали, содержащее монохроматический источник света и последовательно установленные по ходу световых лучей афокальную систему, светоделитель для формирования опорной и объектной ветвей и приемной части, установленные в объектной ветви по ходу световых лучей, распространяющихся от светоделителя, первый фокусирующий объектив для формирования сходящегося гомоцентрического пучка световых лучей со светящейся точкой в его заднем фокусе, синтезированный голограммный оптический элемент, состоящий из трех осевых соосных между собой синтезированных голограмм, одна из которых является голограммой-компенсатором, а две другие голограммы являются юстировочными, плоское эталонное зеркало, установленное в опорной ветви перпендикулярно к световым лучам, распространяющимся от светоделителя, установленные в приемной части по ходу световых лучей, распространяющихся от светоделителя, второй фокусирующий объектив, фотоприемное устройство и блок отображения информации, отличающееся тем, что устройство дополнительно содержит первую марку с двумя пересекающимися между собой штрихами, расположенную между афокальной системой и светоделителем и совмещенную с первым промежуточным изображением асферической поверхности оптической детали, при этом первая марка закреплена в первом узле, снабженном механизмом угловых поворотов для угловой ориентации первой марки и тремя линейными каретками для выполнения возможности смещения первой марки в трех взаимно перпендикулярных направлениях, одно из которых перпендикулярно к плоскости расположения ее штрихов, для чего каждая линейная каретка снабжена приводом, подключенным к первому блоку управления приводами, для обеспечения возможности измерения величины смещения первой марки каждая линейная каретка снабжена датчиком линейного перемещения, подключенным на вход первого блока цифровой индикации, в приемной части по ходу световых лучей после светоделителя установлено плоское поворотное зеркало, введена вторая марка с двумя пересекающимися между собой штрихами, которая совмещена со вторым промежуточным изображением асферической поверхности оптической детали и закреплена во втором узле, снабженном механизмом угловых поворотов для угловой ориентации второй марки и тремя линейными каретками для выполнения возможности смещения второй марки в трех взаимно перпендикулярных направлениях, одно из которых перпендикулярно к плоскости расположения ее штрихов, для чего каждая линейная каретка снабжена приводом, подключенным к второму блоку управления приводами, для обеспечения возможности измерения величины смещения второй марки каждая линейная каретка снабжена датчиком линейного перемещения, подключенным на вход второго блока цифровой индикации, в задней фокальной плоскости первого фокусирующего объектива установлена диафрагма.
4. Устройство для определения положений дефектов на асферической поверхности оптической детали по п. 3, отличающееся тем, что оба штриха каждой марки пересекаются друг с другом под углом 90 градусов и каждый из них ориентирован параллельно одному из двух направлений смещения соответствующей ему марки, параллельных плоскости расположения пересекающихся между собой двух штрихов.
| Устройство для контроля асферических поверхностей | 1981 |
|
SU1017923A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОВЕРХНОСТЕЙ ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 1999 |
|
RU2155932C1 |
| ИНТЕРФЕРОМЕТР ДЛЯ КОНТРОЛЯ АСФЕРИЧЕСКИХ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА | 2009 |
|
RU2396513C1 |
| JP 7198316 A, 01.08.1995. | |||

