Изобретение относится к измерительной технике и может быть использовано в качестве элемента в системах стабилизации и навигации. Оно может найти применение в приборах измерения механических величин компенсационного типа.
Известно устройство для измерения ускорений (пат. RU 2308038 МПК G01P 15/13, опуб. 10.10.2007, бюл. №28) содержащее чувствительный элемент, датчик угла, усилитель, положительную обратную связь с выхода усилителя на вход датчика момента через последовательно соединенные фазовый детектор положительной обратной связи и преобразователь напряжение-ток, отрицательную интегрирующую обратную связь с выхода усилителя на вход датчика момента через последовательно соединенные фазовый детектор отрицательной обратной связи, интегрирующий усилитель, компаратор, первый ждущий синхронный генератор, реверсивный двоичный счетчик, преобразователь дополнительного кода в прямой, схему собирания (ИЛИ), двоичный умножитель, сглаживающий фильтр, знаковый переключатель, при этом второй выход компаратора соединен со вторым входом реверсивного двоичного счетчика через второй ждущий синхронный генератор, и второй выход реверсивного двоичного счетчика соединен со вторыми входами схемы собирания и знакового переключателя, а выходы генератора опорного напряжения соединены с входами датчика угла, фазовых детекторов положительной и отрицательной обратных связей, и выходы схемы синхронизации соединены с входами компаратора и ждущих синхронных генераторов, и в положительную обратную связь введены первое и второе дифференцирующие устройства в положительную обратную связь с выхода фазового детектора положительной обратной связи на вход преобразователя напряжение-ток через сумматор, входы которого соединены с выходами первого и второго дифференцирующих устройств, а вход второго дифференцирующего устройства соединен с выходом первого дифференцирующих устройств и выход схемы собирания (ИЛИ) является выходом цифрового кода устройства.
Недостатком подобного устройства является малая полоса пропускания.
Наиболее близким по техническому решению является устройство компенсационный акселерометр (Пат. РФ №2449293, опубл. 27.04.2012. Бюл. №12), содержащий чувствительный элемент, датчик угла, выход которого с входом усилителя, датчик момента, положительную и отрицательную обратные связи, фазовые детекторы положительной и отрицательной обратных связей, входы которых соединены с выходом усилителя, и дополнительные входы датчика угла, фазовых детекторов положительной и отрицательной обратных связей соединены с выходом генератора опорного напряжения, причем выход фазового детектора отрицательной обратной связи соединен с входом интегрирующего усилителя, выходы пары ждущих синхронных генераторов соединены с входом двоичного умножителя через последовательно соединенные по информационным входам реверсивный двоичный счетчик, преобразователь дополнительного кода в прямой и схему собирания, при этом в отрицательную обратную связь введены с выхода интегрирующего усилителя на дополнительные входы ждущих синхронных генераторов последовательно по информационным входам управляемый релейный элемент и преобразователь уровня, причем дополнительные входы пары ждущих синхронных генераторов и управляемого релейного элемента соединены с выходом схемы синхронизации, а один из входов сумматора соединен с выходом двоичного умножителя через цифровой фильтр и знаковый переключатель, дополнительный вход которого соединен с одним из выходов реверсивного двоичного счетчика, являющегося цифровым выходом устройства, кроме того, в положительную обратную связь с выхода фазового детектора положительной обратной связи последовательно на дополнительный вход сумматора введены сглаживающий фильтр, блок управления динамической ошибкой и преобразователь напряжение-ток, и выход сумматора соединен с входом датчика момента.
Недостатком компенсационного акселерометра является низкая точность измерения и малая полоса пропускания.
Технической задачей настоящего изобретения является расширение полосы пропускания устройства для измерения ускорений и повышение точности измерения.
Это достигается за счет того, что в компенсационный акселерометр, содержащий чувствительный элемент, датчик угла, выход которого соединен с входом усилителя, датчик момента, отрицательную обратную связь, фазовый детектор отрицательной интегрирующей обратной связи, вход которого соединен с выходом усилителя, и дополнительные входы датчика угла, и фазового детектора отрицательной интегрирующей обратной связи соединены с выходом генератора опорного напряжения, причем выход фазового детектора отрицательной интегрирующей обратной связи соединен с входом интегрирующего усилителя, выходы которого соединены с входами пары ждущих синхронных генераторов через управляемый релейный элемент и преобразователь уровня, а выходы пары ждущих синхронных генераторов соединены с входом двоичного умножителя через последовательно соединенные по информационным входам реверсивный двоичный счетчик, преобразователь дополнительного кода в прямой и схему собирания, и выход двоичного умножителя соединен через цифровой фильтр с одним из входов знакового переключателя, другой вход которого соединен с выходом реверсивного двоичного счетчика, и выход знакового переключателя соединен с входом датчика моментов через сумматор, выход двоичного умножителя является дискретным выходом, кроме того, дополнительные входы пары ждущих синхронных генераторов, управляемого релейного элемента соединены с выходом схемы синхронизации, в отрицательную обратную связь введен блок управления динамической ошибкой, вход которого соединен с выходом фазового детектора отрицательной обратной связи через сглаживающий фильтр, а выход блока управления динамической ошибкой соединен с одним из входов сумматора через преобразователь напряжение-ток, кроме того, выход управляемого релейного элемента соединен с входом аналогового фильтра с передаточной функцией 
Введение в компенсационный акселерометр отрицательной обратной связи, блока управления динамической ошибки, управляемого релейного элемента, цифрового фильтра, дополнительного релейного элемента и аналогового фильтра вне контура управления обеспечивает расширение полосы пропускания, изменение динамической ошибки и повышение точности измерения
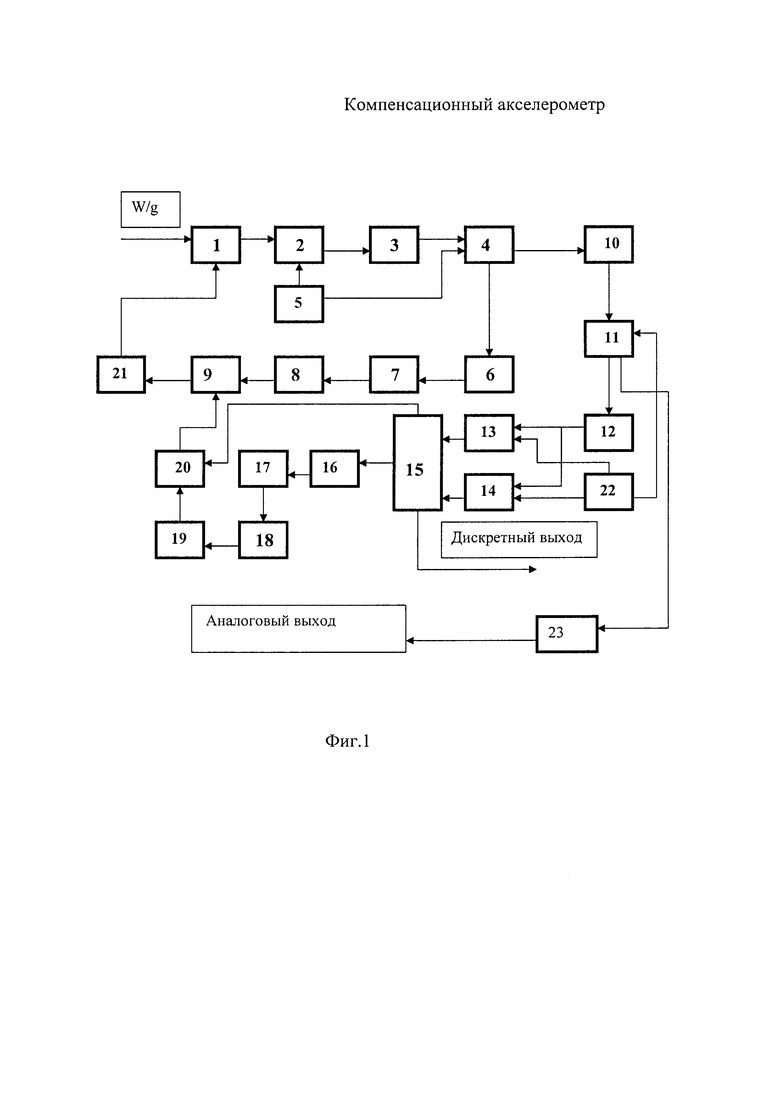
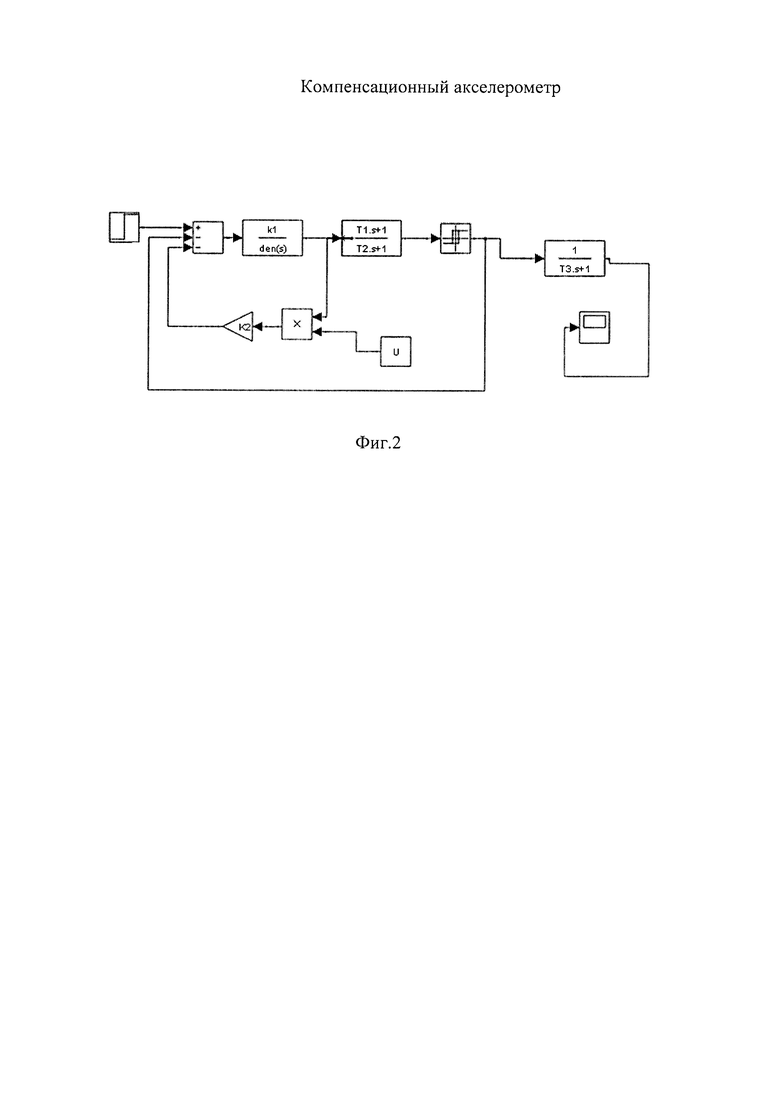
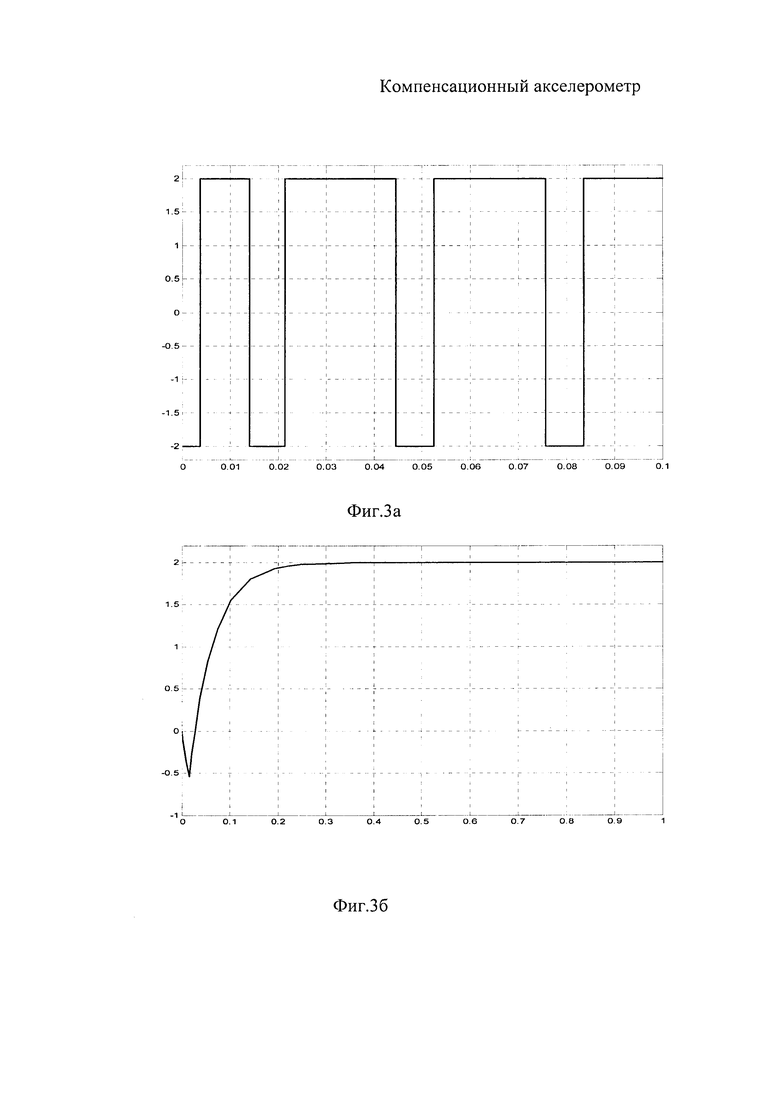
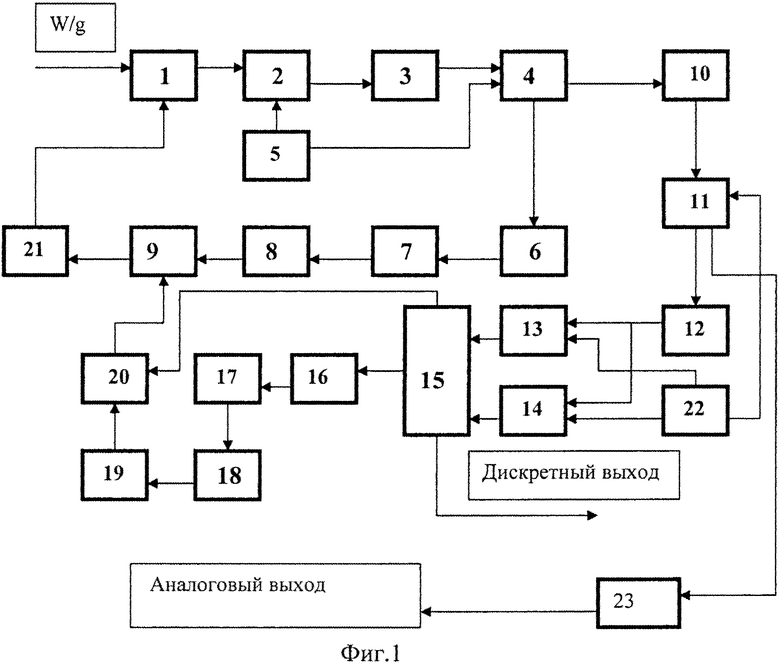
На фиг. 1 изображена блок-схема компенсационного акселерометра; на фиг. 2 - схема моделирования компенсационного акселерометра; на фиг. 3а и фиг. 3б - результаты моделирования.
Компенсационный акселерометр содержит чувствительный элемент 1, отклонение которого фиксирует датчик угла 2. Выход датчика угла 2 соединен с усилителем 3. Выход усилителя 3 соединен с входом фазового детектора отрицательной интегрирующей обратной связи 4 (ФДОИОС). Дополнительные входы датчика угла 2, ФДОИОС 4 соединены с выходом генератора опорного напряжения 5 (ГОН). Выход ФДОИОС 4 соединен с входом сглаживающего фильтра 6. Выход сглаживающего фильтра 6 соединен с входом блока управления динамической ошибки 7 выход, которого соединен с входом преобразователя напряжение-ток 8. Выход преобразователя напряжение-ток 8 соединен с одним из входов сумматора 9. Другой выход ФДОИОС 4 соединен с входом интегрирующего усилителя 10, выход которого соединен с входом управляемого релейного элемента 11. Выход управляемого релейного элемента 11 соединен с входом преобразователя уровня 12, выходы преобразователя уровня 12 соединены с входами пары ждущих синхронных генераторов 13 и 14. Выходы ждущих синхронных генераторов 13 и 14 соединены с входами реверсивного двоичного счетчика 15, выход которого соединен с входом преобразователя дополнительного кода в прямой 16. Выход преобразователя дополнительного кода в прямой 16 соединен с входом схемы собирания 17. Выход схемы собирания 17 соединен с входом двоичного умножителя 18. Выход двоичного умножителя 18, через цифровой фильтр 19, соединен с одним из входов знакового переключателя 20. Другой вход знакового переключателя 20 соединен с выходом реверсивного двоичного счетчика 15. Выход знакового переключателя 20 соединен с входом сумматора 9 и выход сумматора 9 соединен с входом датчика момента 21, который закреплен на оси чувствительного элемента 1. Дополнительные входы пары ждущих синхронных генераторов 13 и 14, также управляемого релейного элемента 11 соединены с выходом схемы синхронизации 22. Выход управляемого релейного элемента 11 соединен с входом аналогового фильтра 23 с передаточной функцией 
Внутреннее содержание ФДОИОС, компаратора, ждущих синхронных генераторов, реверсивного двоичного счетчика, схемы собирания, двоичного умножителя, знакового переключателя, фильтров, схемы синхронизации приведены в книге: П. Хоровиц, У. Хилл. Искусство схемотехники. М.: Мир, т 1-3, 1993.
Компенсационный акселерометр работает следующим образом.
При действии ускорения на чувствительный элемент 1, выполненный в виде маятника, действует инерционный момент. Под действием этого момента происходит отклонение чувствительного элемента 1, которое фиксируется датчиком угла 2, обмотки, возбуждения которого соединены с выходом ГОН 5. Сигнал с датчика угла 2, после усиления усилителем 3, поступает на вход ФДОИОС 4. С помощью ФДОИОС 4 и ГОН 5 выделяется фаза отклонения чувствительного элемента 1. На выходе ФДОИОС 4 сигнал будет в противофазе отклонения чувствительного элемента 1. Сигнал с выхода ФДОИОС 4, в виде напряжения, поступает на вход сглаживающего фильтра 6. Выход фильтра 6 соединен с входом блока управления динамической ошибкой 7, в котором с помощью управляющего сигнала можно изменять коэффициент передачи в отрицательной обратной связи, а, следовательно, параметры всего компенсационного акселерометра. Выходной сигнал с блока управления динамической ошибкой 7 поступает на вход преобразователя напряжение-ток 8, и после преобразования на один из входов сумматора 9. Сигнал с ФДОИОС 4 поступает также на вход интегрирующего усилителя 10, сигнал с которого поступает на один из входов управляемого релейного элемента 11. В управляемом релейном элементе 11 происходит сравнение сигнала с выхода интегрирующего усилителя 10 с сигналом, выделенного стабильного по частоте и амплитуде сигнала с выхода схемы синхронизации 22. Если сигнал с выхода интегрирующего усилителя 10 будет больше треугольного напряжения с выхода 22, то на выходе управляемого релейного элемента 11 будет высокий логический уровень, если меньше, то на выходе 11 низкий логический уровень. Уровень сигнала зависит от фазы отклонения чувствительного элемента 1. Сигналы с управляемого релейного элемента 11, в виде уровня, поступают на вход преобразователя уровня 12, а затем на входы пары ждущих синхронных генераторов 13 и 14, которые с помощью схемы синхронизации 22, выдают сигналы в виде импульса на каждое воздействие входящего сигнала (с выхода 11), равного "1". Реверсивный двоичный счетчик 15 производит подсчет единичных импульсов поступающих с выхода ждущего синхронного генератора 13 и вычитание импульсов поступающих с выхода ждущего синхронного генератора 14. Реверсивный двоичный счетчик 15 положительную информацию представляет в прямом коде, а отрицательную в дополнительном коде. Информация с реверсивного двоичного счетчика 15, равная разности числа "положительных" и "отрицательных" импульсов, переписывается в преобразователь дополнительного кода в прямой 16. И со схемы собирания 17, включенной на выход 16, переписывается в двоичный умножитель 18. Импульсы с двоичного умножителя 18 поступают на вход цифрового сглаживающего фильтра с большим быстродействием 19, а затем на вход знакового переключателя 20, срабатывание которого происходит по импульсу с реверсивного двоичного счетчика 15. Сигнал с выхода знакового переключателя 20 поступает на один из входов сумматора 9, а затем на вход датчика момента 21, который развивает момент, по модулю и знаку, и компенсирующий угловое отклонение 1, вызванное действием ускорения объекта. Выходная информация о величине и знаке действующего ускорения, в виде цифрового кода, выдается с выхода реверсивного двоичного счетчика 15, а аналоговая информация - с выхода аналогового фильтра 23, с передаточной функцией, введенного с выхода управляемого релейного элемента 11 с передаточной функцией 
Схема моделирования компенсационного акселерометра с блоком управления динамической ошибкой в отрицательной обратной связи и аналоговым фильтром представлена на фиг. 2. Результаты моделирования компенсационного акселерометра представлены на фиг. 3а и фиг. 3б, переходные процессы в дискретном и аналоговом контуре компенсационного акселерометра реализованы при относительном входном воздействии, равном 
Из графиков фиг. 3а и фиг. 3б следует, что реализовано устройство как с дискретным, так и аналоговым выходом, работающее в автоколебательном режиме. Частота автоколебаний в компенсационном акселерометре будет определять как полосу пропускания, так и быстродействие.
Введение в компенсационный акселерометр блока управления динамической ошибкой, управляемого релейного элемента и цифрового фильтра с большим быстродействием, а также фильтра с передаточной функцией, позволяет создать устройство как с дискретным выходом, так и аналоговым с повышенной точностью и расширенной полосой пропускания.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2010 |
|
RU2449293C1 |
| Компенсационный акселерометр | 2016 |
|
RU2649246C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2009 |
|
RU2405160C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2012 |
|
RU2513665C1 |
| Компенсационный акселерометр | 2019 |
|
RU2708716C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2010 |
|
RU2447451C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2009 |
|
RU2411522C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2008 |
|
RU2363957C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2007 |
|
RU2329512C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2012 |
|
RU2513667C1 |
Изобретение относится к области приборостроения и может найти применение в приборах измерения механических величин компенсационного типа. Заявлен компенсационный акселерометр, содержащий чувствительный элемент, датчик угла, выход которого соединен с входом усилителя, датчик момента, отрицательную обратную связь, фазовый детектор отрицательной интегрирующей обратной связи, вход которой соединен с выходом усилителя. Дополнительные входы датчика угла и фазового детектора отрицательной интегрирующей обратной связи соединены с выходом генератора опорного напряжения. Выход фазового детектора отрицательной интегрирующей обратной связи соединен с входом интегрирующего усилителя, выходы которого соединены с входами пары ждущих синхронных генераторов через управляемый релейный элемент и преобразователь уровня. Выходы пары ждущих синхронных генераторов соединены с входом двоичного умножителя через последовательно соединенные по информационным входам реверсивный двоичный счетчик, преобразователь дополнительного кода в прямой и схему собирания, и выход двоичного умножителя соединен через цифровой фильтр с одним из входов знакового переключателя, другой вход которого соединен с выходом реверсивного двоичного счетчика. Выход знакового переключателя соединен с входом датчика моментов через сумматор. Выход двоичного умножителя является дискретным выходом. Дополнительные входы пары ждущих синхронных генераторов, управляемого релейного элемента соединены с выходом схемы синхронизации. В отрицательную обратную связь введен блок управления динамической ошибкой, вход которого соединен с выходом фазового детектора отрицательной обратной связи через сглаживающий фильтр, а выход блока управления динамической ошибкой соединен с одним из входов сумматора через преобразователь напряжение-ток. Кроме того, выход управляемого релейного элемента соединен с входом аналогового фильтра с передаточной функцией 
Компенсационный акселерометр, содержащий чувствительный элемент, датчик угла, выход которого соединен с входом усилителя, датчик момента, отрицательную обратную связь, фазовый детектор отрицательной интегрирующей обратной связи, вход которой соединен с выходом усилителя, а дополнительные входы датчика угла и фазового детектора отрицательной интегрирующей обратной связи соединены с выходом генератора опорного напряжения, причем выход фазового детектора отрицательной интегрирующей обратной связи соединен с входом интегрирующего усилителя, выходы которого соединены с входами пары ждущих синхронных генераторов через управляемый релейный элемент и преобразователь уровня, а выходы пары ждущих синхронных генераторов соединены с входом двоичного умножителя через последовательно соединенные по информационным входам реверсивный двоичный счетчик, преобразователь дополнительного кода в прямой и схему собирания, выход двоичного умножителя соединен через цифровой фильтр с одним из входов знакового переключателя, другой вход которого соединен с выходом реверсивного двоичного счетчика, и выход знакового переключателя соединен с входом датчика моментов через сумматор, выход двоичного умножителя является дискретным выходом, кроме того, дополнительные входы пары ждущих синхронных генераторов и управляемого релейного элемента соединены с выходом схемы синхронизации, отличающийся тем, что введен в отрицательную обратную связь блок управления динамической ошибкой, вход которого соединен с выходом фазового детектора отрицательной обратной связи через сглаживающий фильтр, а выход блока управления динамической ошибкой соединен с одним из входов сумматора через преобразователь напряжение-ток, причем выход управляемого релейного элемента соединен с входом аналогового фильтра с передаточной функцией  (где T - постоянная времени, s - оператор преобразования Лапласа), а выход аналогового фильтра является аналоговым выходом устройства.
(где T - постоянная времени, s - оператор преобразования Лапласа), а выход аналогового фильтра является аналоговым выходом устройства.
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2010 |
|
RU2449293C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2006 |
|
RU2308038C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2007 |
|
RU2329512C1 |
| US 5396439 A, 07.03.1995 | |||
| US 6073490 A, 13.06.2000 | |||
| US 20140041452 A1,13.02.2014. | |||

