Перекрестная ссылка на родственные заявки
[0001] Данная заявка ссылается на приоритет предварительной заявки США №61/754260, зарегистрированной 18 января 2013 г. Полное содержание этой ранее зарегистрированной заявки включено в данное описание путем ссылки на соответствующий источник.
Предпосылки создания изобретения
Область техники, к которой относится изобретение
[0002] Формы осуществления данного изобретения, в целом, относятся к системам радиосвязи, таким как, но не ограничиваясь ими, универсальная наземная сеть радиодоступа (Terrestrial Radio Access Network, UTRAN) универсальной мобильной системы связи (Universal Mobile Telecommunications System, UMTS), эволюционированная универсальная наземная сеть радиодоступа (Evolved UTRAN, E-UTRAN), система по проекту долгосрочной эволюции (Long Term Evolution, LTE) и/или усовершенствованная LTE (LTE-Advanced, LTE-A). Некоторые формы осуществления изобретения могут касаться распределения ресурсов физического канала управления восходящей линии (Physical Uplink Control Channel, PUCCH) для подтверждений приема (Acknowledgements, ACK) гибридного автоматического запроса на повторную передачу (Hybrid Automatic Repeat reQuest, HARQ), соответствующих транспортному блоку физического совместно используемого канала нисходящей линии (Physical Downlink Shared Channel, PDSCH).
Описание предшествующего уровня техники
[0003] Универсальная наземная сеть радиодоступа (UTRAN) универсальной мобильной системы связи (UMTS) относится к системе связи, содержащей базовые станции или Узлы В (Node Bs) и, например, контроллеры сети радиосвязи (Radio Network Controllers, RNC). Сеть UTRAN обеспечивает возможность связи между оборудованием пользователя (User Equipment, UE) и базовой сетью. Контроллер RNC обеспечивает функциональные возможности управления для одного или нескольких Узлов В. Контроллер RNC и его соответствующие узлы В называют подсистемой сети радиосвязи (Radio Network Subsystem, RNS). В случае усовершенствованной UTRAN (Enhanced UTRAN, E-UTRAN) контроллер RNC не существует, и большинство функциональных возможностей контроллера RNC содержится в усовершенствованном Узле В (evolved Node В, eNodeB), называемом также Узлом В сети E-UTRAN.
[0004] Долгосрочная эволюция (LTE) или E-UTRAN относится к улучшениям UMTS посредством улучшения эффективности и услуг, более низких затрат и использования новых возможностей ресурсов спектра. В частности, LTE является стандартом Проекта сотрудничества по созданию системы третьего поколения (3rd Generation Partnership Project, 3GPP), который обеспечивает пиковые скорости передачи данных по восходящей линии по меньшей мере 50 Мбит/с и пиковые скорости передачи данных по нисходящей линии по меньшей мере 100 Мбит/с. LTE поддерживает снижение масштабируемой ширины полосы несущей с 20 до 1,4 МГц и поддерживает как дуплексный режим с частотным разделением каналов (Frequency Division Duplexing, FDD), так и дуплексный режим с временным разделением каналов (Time Division Duplexing, TDD). Преимуществами LTE являются, например, высокая пропускная способность, низкое время задержки, поддержка режимов FDD и TDD на одной и той же базовой системе (платформе), улучшенное впечатление об обслуживании конечного пользователя и простая архитектура, приводящая к низким эксплуатационным расходам.
[0005] Дальнейшие релизы (версии стандарта) (Release, Rel) 3 GPP LTE (например, LTE Rel-11, LTE-Rel-12) нацелены на будущие усовершенствованные системы Международной ассоциации мобильной связи (International Mobile Telecommunications Advanced, IMT-A), упоминаемые здесь для удобства просто как усовершенствованная LTE (LTE Advanced, LTE-A). Система LTE-A направлена на расширение и оптимизацию технологий радиодоступа 3 GPP LTE. Цель системы LTE-A состоит в том, чтобы обеспечить значительно улучшенные услуги посредством более высоких скоростей передачи данных и более низкого времени задержки с уменьшенной стоимостью. LTE-A будет более оптимизированной системой радиосвязи, выполняющей требования Сектора радиосвязи Международного союза электросвязи (International Telecommunication Union-Radio, ITU-R) для системы IMT-A при поддержке обратной совместимости.
Сущность изобретения
[0006] Одна форма осуществления изобретения относится к способу, включающему задание значений сдвига ресурса подтверждения (Ack)/отрицательного подтверждения (Negative Ack, Nack) (Ack/ Nack Resource Offset, ARO) в режиме дуплексной связи с временным разделением (TDD) при помощи первого набора значений и второго набора значений. Первый набор значений содержит отрицательные значения и используется для определения сдвига ресурса подтверждения (ACK) гибридного автоматического запроса на повторную передачу (HARQ) так, чтобы HARQ-ACK передавался в ресурсах физического канала управления восходящей линии (PUCCH), соответствующих другому субкадру нисходящей линии, и второй набор значений содержит значения между -2 и 2.
[0007] Согласно форме осуществления изобретения, когда m=0, значения ARO равны {0, -2, -1, 2}, где m - относительный индекс субкадра нисходящей линии физического совместно используемого канала нисходящей линии (PDSCH), планируемого усовершенствованным физическим каналом управления нисходящей линии (Enhanced Physical Downlink Control Channel, EPDCCH).
[0008] В форме осуществления изобретения, когда m>0, по меньшей мере одно из первого набора значений позволяет сжатие подтверждений (ACK) гибридного автоматического запроса на повторную передачу (HARQ) в область ресурса физического канала управления восходящей линии (PUCCH), соответствующую субкадру n<m нисходящей линии, где m - относительный индекс субкадра нисходящей линии физического совместно используемого канала нисходящей линии (PDSCH), планируемого усовершенствованным физическим каналом управления нисходящей линии (EPDCCH).
[0009] Согласно форме осуществления изобретения по меньшей мере одно из первого набора значений приводит к подтверждениям (ACK) гибридного автоматического запроса на повторную передачу (HARQ), передаваемым в ресурсах физического канала управления восходящей линии (PUCCH), соответствующих по меньшей мере одному из субкадра n=0 нисходящей линии или субкадра n=1 нисходящей линии.
[00010] В форме осуществления изобретения по меньшей мере одно из первого набора значений приводит к подтверждениям (ACK) гибридного автоматического запроса на повторную передачу (HARQ), передаваемым в ресурсах физического канала управления восходящей линии (PUCCH), соответствующих субкадру n=m-1 нисходящей линии, где m - относительный индекс субкадра нисходящей линии физического совместно используемого канала нисходящей линии (PDSCH), планируемого усовершенствованным физическим каналом управления нисходящей линии (EPDCCH).
[00011] Другая форма осуществления изобретения относится к устройству, содержащему по меньшей мере один процессор и по меньшей мере одно запоминающее устройство, содержащее код компьютерной программы. По меньшей мере одно запоминающее устройство и код компьютерной программы сконфигурированы по меньшей мере одним процессором так, чтобы заставлять устройство по меньшей мере определять значения сдвига ресурса подтверждения (Ack)/отрицательного подтверждения (Nack) (ARO) в режиме дуплексной связи с временным разделением (TDD) при помощи первого набора значений и второго набора значений. Первый набор значений содержит отрицательные значения и используется для определения сдвига ресурса подтверждения (ACK) гибридного автоматического запроса на повторную передачу (HARQ) так, чтобы HARQ-ACK передавался в ресурсах физического канала управления восходящей линии (PUCCH), соответствующих другому субкадру нисходящей линии, и второй набор значений содержит значения между -2 и 2.
[00012] Еще одна форма осуществления изобретения относится к компьютерной программе, воплощенной на машиночитаемом носителе. Компьютерная программа сконфигурирована для управления процессором так, чтобы выполнять процесс, включающий задание значений сдвига ресурса подтверждения (Ack)/отрицательного подтверждения (Nack) (ARO) в режиме дуплексной связи с временным разделением (TDD) при помощи первого набора значений и второго набора значений. Первый набор значений содержит отрицательные значения и используется для определения сдвига ресурса подтверждения (ACK) гибридного автоматического запроса на повторную передачу (HARQ) так, чтобы HARQ-ACK передавался в ресурсах физического канала управления восходящей линии (PUCCH), соответствующих другому субкадру нисходящей линии, и второй набор значений содержит значения между -2 и 2.
[00013] Еще одна форма осуществления изобретения относится к устройству, содержащему средство для задания значений сдвига ресурса подтверждения (Ack)/отрицательного подтверждения (Nack) (ARO) в режиме дуплексной связи с временным разделением (TDD) при помощи первого набора значений и второго набора значений. Первый набор значений содержит отрицательные значения и используется для определения сдвига ресурса подтверждения (ACK) гибридного автоматического запроса на повторную передачу (HARQ) так, чтобы HARQ-ACK передавался в ресурсах физического канала управления восходящей линии (PUCCH), соответствующих другому субкадру нисходящей линии, и второй набор значений содержит значения между -2 и 2.
Краткое описание чертежей
[00014] Для надлежащего понимания изобретения должны быть сделаны ссылки на прилагаемые чертежи, на которых:
[00015] Фиг. 1 иллюстрирует пример расположения ресурса PUCCH в нескольких субкадрах согласно форме осуществления изобретения.
[00016] Фиг. 2 иллюстрирует пример расположения ресурса PUCCH в нескольких субкадрах согласно другой форме осуществления изобретения.
[00017] Фиг. 3 иллюстрирует один подход для получения двух различных значений для двух значений ARO согласно форме осуществления изобретения.
[00018] Фиг. 4 иллюстрирует другой подход для получения двух различных значений для двух значений ARO согласно форме осуществления изобретения.
[00019] Фиг. 5 иллюстрирует еще один подход для получения двух различных значений для двух значений ARO согласно форме осуществления изобретения.
[00020] Фиг. 6 иллюстрирует устройство согласно форме осуществления изобретения.
Подробное описание
[00021] Легко понять, что компоненты изобретения, которые здесь в общем описаны и показаны на фигурах, могут быть размещены и разработаны в самых различных конфигурациях. Таким образом, нижеследующее подробное описание форм осуществления способов, систем, устройств и программных изделий для компьютера для задания значений ARO, которое представлено на прилагаемых фигурах, не предназначено для ограничения объема изобретения, а является только представителем выбранных форм осуществления изобретения.
[00022] Если желательно, различные функции, рассматриваемые ниже, могут выполняться в другом порядке и/или одновременно друг с другом. Кроме того, если желательно, одна или несколько из описанных функций могут быть необязательными или могут быть объединены. Также, нижеследующее описание нужно рассматривать как просто иллюстрирующее принципы, идеи и формы осуществления данного изобретения, а не ограничивающее его.
[00023] Некоторые формы осуществления изобретения касаются распределения ресурсов физического канала управления восходящей линии (PUCCH) для подтверждений HARQ-ACK, соответствующих транспортному блоку физического совместно используемого канала нисходящей линии (PDSCH).
[00024] Для дуплексного режима с частотным разделением каналов (FDD) ресурс PUCCH рассчитывается как функция сдвига ресурса подтверждения (Ack)/отрицательного подтверждения (Nack) (ARO). Для режима FDD один пример сдвига ресурса Ack/Nack может быть равен {-2, -1, 0, 2}. 2-битовая индикация сдвига ресурса Ack/Nack может присутствовать для всех форматов информации управления нисходящей линии, которые переносит усовершенствованный физический канал управления нисходящей линии (EPDCCH).
[00025] Однако для дуплексного режима с временным разделением каналов (TDD) 2-битовое поле ARO также присутствует, но значения сдвига ARO для режима TDD еще не определены.
[00026] В настоящее время в организации 3GPP было сделано предварительное предложение о том, что эти четыре значения ARO для режима TDD могут быть равны {[-2], [-1], 0, 2}, где значения в квадратных скобках -2 и -1 не были согласованы окончательно, а значения 0 и 2 были согласованы. Проблема заключается в том, как определить два отсутствующих значения ARO таким образом, чтобы ресурсы канала PUCCH, зарезервированные для динамического HARQ-ACK, могли масштабироваться динамически согласно нагрузке.
[00027] Соответственно, одна форма осуществления изобретения предлагает способ для значений сдвига ресурса подтверждения Ack)/Nack (ARO) в режиме TDD, чтобы дополнительно позволить сжатие ресурсов канала PUCCH у нескольких субкадров нисходящей линии связи (Downlink, DL) в окне пакетирования, как будет подробно рассмотрено ниже.
[00028] Формат 1а/1b распределения ресурсов PUCCH для подтверждений HARQ-ACK, соответствующих транспортному блоку PDSCH, планируемому через канал EPDCCH, был обсужден на встрече 3GPP RAN1#71. Несколько соглашений были достигнуты, которые коротко изложены ниже, с некоторыми пунктами, требующими дальнейшего изучения.
[00029] Для режима FDD ресурс PUCCH  рассчитывается как:
рассчитывается как:  где ΔARO={-2, -1, 0, 2} и
где ΔARO={-2, -1, 0, 2} и  является сдвигом ресурса PUCCH, связанного с набором EPDCCH с индексом j.
является сдвигом ресурса PUCCH, связанного с набором EPDCCH с индексом j.
[00030] Независимо от того, составляет ли минимальный уровень агрегации каналов EPDCCHs в наборе EPDCCH 1 или 2 элемента усовершенствованного канала управления (Enhanced Control Channel Elements, ECCE),  определяется для локализованного и распределенного EPDCCH, соответственно, как:
определяется для локализованного и распределенного EPDCCH, соответственно, как:  , где neCCE,j - индекс первого элемента ЕССЕ при передаче EPDCCH в наборе EPDCCH с индексом j; N -число элементов ECCEs на блок физических ресурсов (Physical Resource Block, PRB); kp определяется из порта опорных сигналов для демодуляции (Demodulation Reference Signal, DMRS), используемого для демодуляции EPDCCH; kp={0, 1, 2, 3}, если N=4; kp={0, 1}, если N=2.
, где neCCE,j - индекс первого элемента ЕССЕ при передаче EPDCCH в наборе EPDCCH с индексом j; N -число элементов ECCEs на блок физических ресурсов (Physical Resource Block, PRB); kp определяется из порта опорных сигналов для демодуляции (Demodulation Reference Signal, DMRS), используемого для демодуляции EPDCCH; kp={0, 1, 2, 3}, если N=4; kp={0, 1}, если N=2.
[00031] Явная 2-битовая индикация сдвига ресурса Ack/Nack (ARO) всегда присутствует во всех форматах управляющей информации нисходящей линии связи (Downlink Control Information, DCI), которые переносятся каналом EPDCCH. Для канала EPDCCH, передаваемого во вторичных сотах (Secondary Cell, Scell), механизмы распределения ресурсов те же самые, что и в релизе Rel-10, где используется индикатор ресурсов HARQ-ACK (HARQ-ACK Resource Indicator, ARI) релиза Rel-10 и поле ARO устанавливается на все нули. Поле ARO может отсутствовать в форматах 0 или 4 информации DCI. Независимо от того, сконфигурировано ли специфическое для абонентского оборудования (User Equipment, UE) Rel-11 значение  для технологии координированной передачи и приема (Coordinated Multi-Point, СоМР), вышеприведенное уравнение 1 используется для грантов DL, принимаемых по каналу EPDCCH.
для технологии координированной передачи и приема (Coordinated Multi-Point, СоМР), вышеприведенное уравнение 1 используется для грантов DL, принимаемых по каналу EPDCCH.
[00032] Для режима TDD в случае, где UE сконфигурировано для мониторинга EPDCCH во всех субкадрах в пределах одного и того же окна пакетирования, в дополнение к членам, представленным в формуле определения ресурса PUCCH для режима FDD, для режима TDD ресурс PUCCH зависит также от:  , где NeCCE,i,j равно числу элементов eCCEs в субкадре i в наборе EPDCCH j, сконфигурированном для этого оборудования UE, и m (0…М-1) - относительный индекс субкадра DL PDSCH, планируемого каналом EPDCCH.
, где NeCCE,i,j равно числу элементов eCCEs в субкадре i в наборе EPDCCH j, сконфигурированном для этого оборудования UE, и m (0…М-1) - относительный индекс субкадра DL PDSCH, планируемого каналом EPDCCH.
[00033] 2-битовое поле ARO присутствует также и в режиме TDD. Остающимся для дальнейшего изучения является задание значений сдвига ARO для режима TDD. Некоторыми примерами возможных вариантов для значений ARO для режима TDD являются следующие:
- Вариант 1: такие же как в режиме FDD
- Вариант 2: {0, 2, -NeCCE,m,j, NeCCE,m,j}
- Вариант 3: {0, 2, N(1)PUCCH,0-N(1)PUCCH,j, N(1)PUCCH,1 - N(1)PUCCH,j}
- Вариант 4: {0,-NeCCE,0,j, - (NeCCE,0,j+NeCCE,1,j), - (NeCCE,0,j+NeCCE,1,j + NeCCE, 2,j)}
- …
[00034] Для агрегирования несущих присутствие или использование сдвига ARO может быть определено подобно его определению для режима FDD. Для дальнейшего изучения назначено использование сдвига ARO, когда DAI>1 и оборудование UE сконфигурировано с форматом 3. Также для дальнейшего изучения назначен случай, когда оборудование UE сконфигурировано так, чтобы не осуществлять мониторинг EPDCCH в некоторых из субкадров в пределах одного и того же окна пакетирования.
[00035] Несколько возможностей (заключенные в квадратные скобки назначены для дальнейшего рассмотрения в RAN1#72) включают:
- Четырьмя значениями ARO являются {[-2], [-1], 0, 2}, где значения 0 и 2 согласованы, а значения -2 и -1 - все еще ожидают дальнейшего рассмотрения.
- [Биты ARO устанавливаются на нуль, если DAI>1 и оборудование UE сконфигурировано с форматом 3 канала PUCCH].
- [Распределение ресурсов PUCCH основывается на всех субкадрах].
[00036] Сдвиг ARO в режиме FDD предназначен для устранения проблемы возможного конфликта ресурсов между несколькими наборами EPDCCH, совместно использующими одну и ту же область ресурсов PUCCH, и значения ARO 0 и 2 в режиме TDD служат для той же цели. Некоторые формы осуществления данного изобретения обеспечивают решения для определения значений ARO в режиме TDD, чтобы далее позволить сжатие ресурсов PUCCH у нескольких субкадров DL в окне пакетирования.
[00037] Как рассмотрено выше, распределение ресурсов PUCCH для подтверждений HARQ-ACK, соответствующих каналу PDSCH, планируемому через канал EPDCCH, основано частично на неявном отображении. Более конкретно, есть взаимно-однозначное отображение между индексом элемента еССЕ с самым малым индесом назначения планирования DL и ресурсом PUCCH, в котором передается HARQ-ACK. Это приводит к ситуации, в которой число требуемых ресурсов PUCCH равно числу элементов eCCEs в данном наборе EPDCCH j. Кроме того, ARO может использоваться для сдвига неявно получаемых ресурсов.
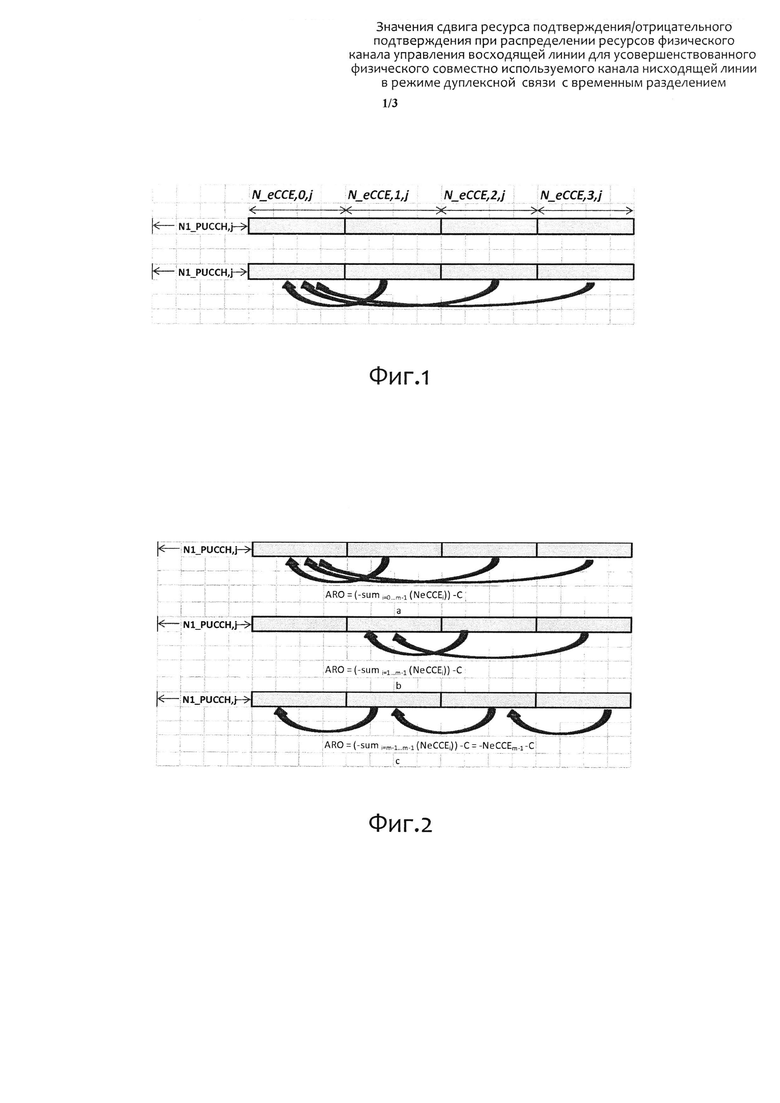
[00038] Фиг. 1 иллюстрирует пример размещения ресурсов PUCCH нескольких субкадров согласно форме осуществления изобретения. В режиме TDD объем служебной информации ресурса PUCCH намного больше, чем в режиме FDD, потому что ресурсы PUCCH для нескольких субкадров линии DL в окне пакетирования "складываются" в один субкадр линии UL, как показано в верхней части фиг. 1. Так как нет никакого перемежения ресурсов как в системе LTE Rel-8, одно распределение назначения EPDCCH линии DL в субкадре#3 может приводить к полной служебной информации UL субкадра#0/1/2 (то есть ресурсы N_eCCE.O,j + N_eCCE.1,j + N_eCCE.2,j PUCCH должны быть зарезервированы, где N_eCCE.m,j - номер еССЕ в наборе EPDCCH j в m-м субкадре окна пакетирования), независимо от того как элементы eCCEs используются в этих трех субкадрах.
[00039] Большие отрицательные значения ARO могут использоваться для динамического перемещения ресурса HARQ-ACK для назначения линии DL, передаваемого в m-м субкадре окна пакетирования, в область PUCCH, соответствующую одному из предыдущих субкадров. Как показано в нижней части фиг. 1, например, для одного конкретного оборудования UE, все ресурсы HARQ-ACK, соответствующие четырем субкадрам линии DL, перемещаются в ресурсы PUCCH, соответствующие первому субкадру, таким образом делая возможным сжатие ресурсов у нескольких субкадров линии DL в окне пакетирования.
[00040] Сжатие ресурсов будет в свою очередь гарантировать гибкое распределение ресурсов между каналами PUSCH и PUCCH. Отмечено, что динамические ресурсы HARQ-ACK располагаются в самой внутренней части канала PUCCH (рядом с каналом PUSCH) и способность сжимать ресурсы HARQ-ACK динамически позволяет планирование PUSCH в тех блоках физических ресурсов (PRBs), которые иначе были бы зарезервированы полустатически для HARQ-ACK, передаваемого по каналу PUCCH.
[00041] Проблема возникает в том, как конкретно определять значения ARO таким образом, чтобы ресурсы PUCCH, зарезервированные для динамического HARQ-ACK, могли динамически масштабироваться согласно нагрузке (например, если использование ресурса в области PUCCH, соответствующей первому субкадру линии DL, не велико, должно быть возможно динамически переместить передачу HARQ-ACK для следующих субкадров линии DL в эту область).
[00042] Согласно форме осуществления изобретения определение сдвига ARO для режима TDD включает два компонента. Одна часть ARO нацелена на сжатие ресурсов и содержит большие (большие, чем 2) отрицательные значения. Она может использоваться для определения сдвига ресурса HARQ-ACK так, чтобы HARQ-ACK оказалось передаваемым в ресурсах PUCCH, соответствующих другому субкадру линии DL. Другая часть ARO нацелена на устранение конфликтов и содержит малые значения (например, -2, -1, 0, 1 или 2).
[00043] Основные свойства сдвига ARO, определяемые согласно некоторым формам осуществления изобретения, могут быть охарактеризованы следующим образом. Когда m=0, определение ARO упрощается, чтобы быть тем же самым, что и для режима FDD, то есть ARO={-2, -1, 0, 2}. Когда m>0, по меньшей мере некоторые из значений ARO позволяют сжатие подтвержений HARQ-ACK в область ресурсов PUCCH, соответствующую субкадру n<m линии DL. В одной форме осуществления изобретения по меньшей мере одно значение ARO приводит к HARQ-ACK, передаваемому в ресурсах PUCCH, соответствующих субкадру n=0 и/или n=1 линии DL. В другой форме осуществления изобретения по меньшей мере одно значение ARO приводит к HARQ-ACK, передаваемому в ресурсах PUCCH, соответствующих субкадру n=m-1 линии DL (то есть в ресурсах HARQ-ACK, соответствующих предыдущему субкадру линии DL).
[00044] Общее определение значений ARO в режиме TDD может быть описано двумя наборами параметров {а1, b1, С1} и {а2, b2, С2} для двух значений ARO, которые необходимо определить, соответственно. Здесь "а" и "b" используются для управления тем, в какую область PUCCH (соответствующую какому субкадру линии DL) перемещается ресурс HARQ-ACK целевого субкадра, то есть, "а" и "b" используются для определения сжатия ресурсов PUCCH. В то же время "С" используется как сдвиг для устранения конфликтов. Например, {"a1", "b1", "С1"} и {"а2", "b2", "С2"} могут зависеть от индекса субкадра "m (0…М-1)", и комбинации {"а1", "b1", "С1"} и {"а2", "b2", "С2"} определяют эти два значения ARO, соответственно.
[00045] Согласно форме осуществления изобретения в режиме TDD значениями ARO для субкадра m являются [O1, O2, 0, 2], где:

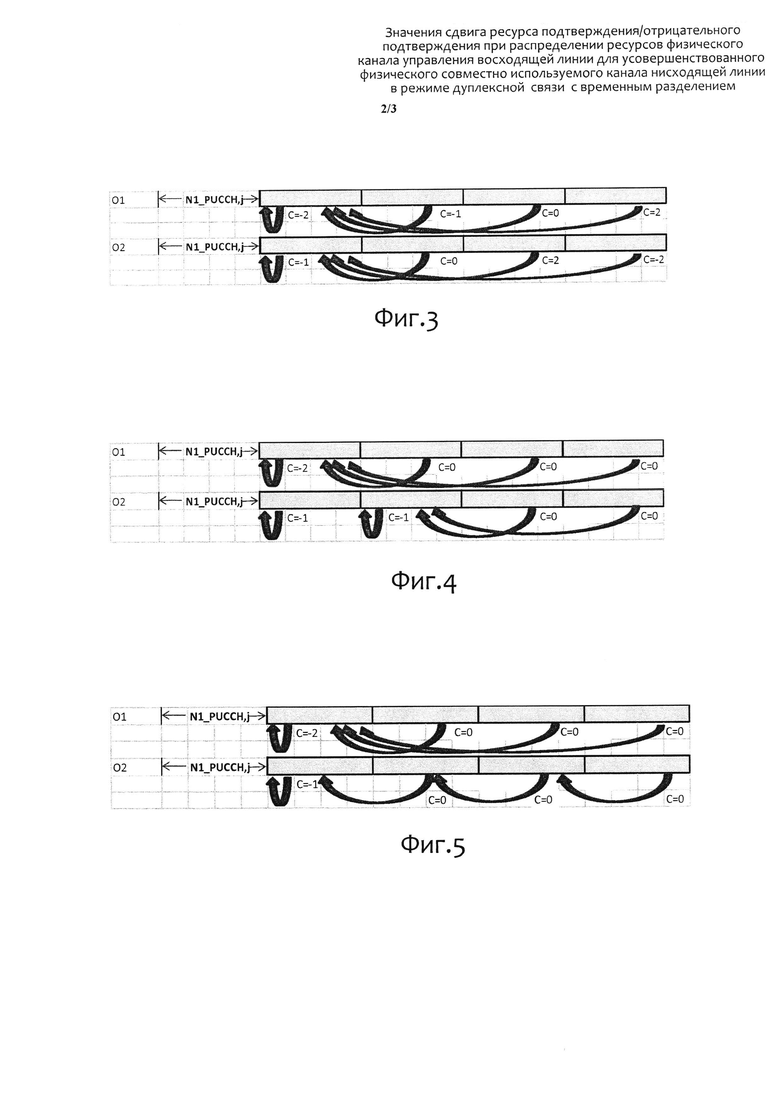
[00046] Фиг. 2 иллюстрирует пример размещения ресурсов PUCCH нескольких субкадров согласно форме осуществления изобретения. Перемещение ресурса HARQ-ACK, соответствующего субкадру m линии DL, в субкадр n (m>n) может быть определено установкой надлежащего параметра для {a, b}. Например:
- a=0, b=m-1, как показано на фиг. 2а, означает, что ресурсы HARQ-ACK субкадра#1/2/3 сжимаются в субкадр#0;
- а=1, b=m-1, как показано на фиг. 2b, означает, что ресурсы HARQ-ACK субкадра#2/3 сжимаются в субкадр#1;
- a=m-1, b=m-1, как показано на фиг. 2 с, означает, что ресурсы HARQ-ACK субкадра#1/2/3 сжимаются в субкадр#0/1/2, соответственно.
[00047] Что касается С, то варианты для {С1, С2} могут быть следующими:
1. {С1, С2} являются постоянными по всем субкадрам в окне пакетирования, например, С1=-2, С2=-1 или С1=0, С2=2;
2. {С1, С2} зависят от индекса субкадра m,
2.1. Значения для {С1, С2} зависят от того, перемещается ли ресурс HARQ-ACK для текущего субкадра в другой субкадр, например,
2.2. Интерпретация {С1, С2} изменяется от субкадра к субкадру циклически следующим образом:
- m=0: С1 определяется как ARO для режима FDD ([-2])
- m=1: С1 определяется как [-1]
- m=2: С1 определяется как [0]
- m=3: C1 определяется как [2]
- m=0: С2 определяется как ARO для режима FDD ([-1])
- m=1: С2 определяется как [0]
- m=2: С2 определяется как [2]
- m=3: С2 определяется как [-2]
[00048] Преимуществом этого подхода является то, что он позволяет полностью гибкое использование четырех значений ARO, соответствующих заранее заданному (например, первому) субкадру. Это может называться "циклической интерпретацией" параметра сдвига Δ={-2, -1, 0, 2}. Это правило можно записать как: С1=Δ(m+1), С2=Δ(mod(m+х,4)+1), где m (0…М-1) - индекс субкадра в окне пакетирования, М - число субкадров в окне пакетирования, и х - сдвиг между С1 и С2. В форме осуществления х может иметь заранее заданное значение, такое как 1 или 2 (х=1 было принято в приведенном выше примере).
[00049] Как упомянуто выше, комбинации {"а1", "b1", "С1"} и {"а2", "b2", "С2"} могут определять два значения ARO, соответственно. Некоторые формы осуществления изобретения могут обеспечить различные подходы, чтобы получать два различных значения для двух значений ARO (O1 и O2).
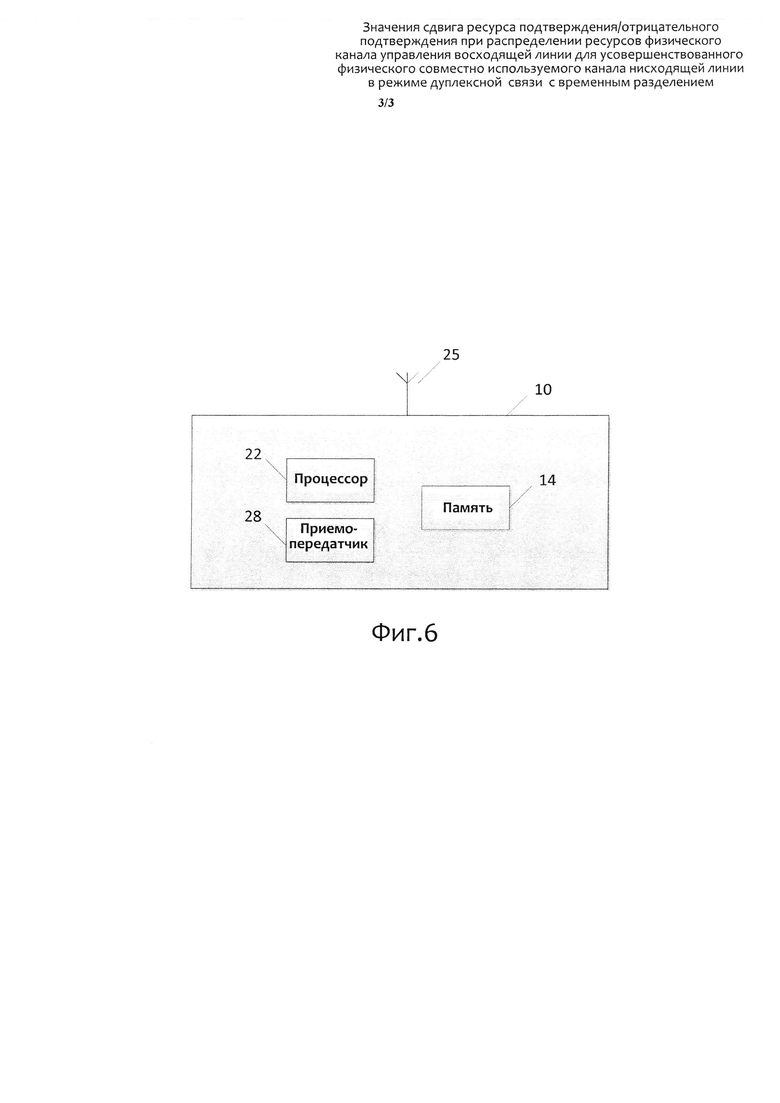
[00050] В одной форме осуществления изобретения [а1, b1] те же, что и [а2, b2], например,  с циклической интерпретацией С1 и С2 как в вышеприведенной опции 2.2. Этот вариант показан на фиг. 3.
с циклической интерпретацией С1 и С2 как в вышеприведенной опции 2.2. Этот вариант показан на фиг. 3.
[00051] В другой форме осуществления изобретения [а1, b1] отличаются от [а2, b2], например,  с С1 и С2 как в вышеприведенной опции 2.1. Этот вариант показан на фиг. 4.
с С1 и С2 как в вышеприведенной опции 2.1. Этот вариант показан на фиг. 4.
[00052] В еще одной форме осуществления изобретения [а1, b1] отличаются от [а2, b2], например,  , с С1 и С2 как в вышеприведенной опции 2.1. Этот вариант показан на фиг. 5.
, с С1 и С2 как в вышеприведенной опции 2.1. Этот вариант показан на фиг. 5.
[00053] Следует заметить, что формы осуществления изобретения не ограничены этими комбинациями, так как другие комбинации задания параметров помимо вышеупомянутых примеров также возможны. Возможно, что система поддерживает только одну стратегию сжатия (например, показанную на фиг. 3). В другом подходе система может поддерживать различные стратегии (например, одну, показанную на фиг. 4, и другую, показанную на фиг. 5). Согласно принципу различных стратегий, определение применяемой стратегии отдается на усмотрение узла eNodeB. Применяемая стратегия может быть сконфигурирована для оборудования UE посредством сигнализации более высокого уровня (такой как сигнализация управления радиоресурсами). Сигнализация может быть основана (по меньшей мере, частично) на параметрах {"а1", "b1", "С1"} и {"а2", "b2", "С2"}.
[00054] Фиг. 6 иллюстрирует пример устройства 10 согласно форме осуществления изобретения. Следует отметить, что специалистам средней квалификации в данной области техники будет очевидно, что устройство 10 может содержать компоненты или особенности, не показанные на фиг. 6. Только те компоненты или особенности, которые необходимы для объяснения изобретения, изображены на фиг. 6.
[00055] Как показано на фиг. 6, устройство 10 содержит процессор 22 для обработки информации и выполнения команд или операций. Процессор 22 может быть универсальным или специализированным процессором любого типа. Хотя на фиг. 6 показан один процессор 22, несколько процессоров могут использоваться согласно другим формам осуществления изобретения. Фактически процессор 22 может содержать в качестве примеров один или несколько универсальных компьютеров, специализированных компьютеров, микропроцессоров, процессоров для цифровой оработки сигналов (Digital Signal Processors, DSPs), программируемых в условиях эксплуатации вентильных матриц (Field-Programmable Gate Arrays, FPGAs), специализированных интегральных схем (Application-Specific Integrated Circuits, ASICs) и процессоров на основе многоядерной архитектуры.
[00056] Кроме того, устройство 10 содержит запоминающее устройство 14, которое может быть соединено с процессором 22, для того, чтобы хранить информацию и команды, которые могут выполняться процессором 22. Запоминающее устройство 14 может быть одним или несколькими блоками памяти любого типа, подходящего к локальным условиям эксплуатации, и может быть реализовано с использованием любой подходящей энергозависимой или энергонезависимой технологии хранения данных, таких как запоминающее устройство на основе полупроводников, магнитное запоминающее устройство и система, оптическое запоминающее устройство и система, фиксированное запоминающее устройство и сменное запоминающее устройство. Например, запоминающее устройство 14 может состоять из любой комбинации оперативного запоминающего устройства (Random Access Memory, RAM), постоянного запоминающего устройства (Read Only Memory, ROM), статического запоминающего устройства, такого как магнитный или оптический диск, или энергонезависимого машиночитаемого носителя любого другого типа. Команды, хранящиеся в запоминающем устройстве 14, могут включать команды программы или код компьютерной программы, которые при выполнении процессором 22 позволяют устройству 10 выполнять описанные здесь задачи.
[00057] Устройство 10 может содержать также одну или несколько антенн 25 для передачи сигналов и/или данных устройству 10 и приема их от него. Кроме того, устройство 10 может содержать приемопередатчик 28, сконфигурированный для передачи и приема информации. Например, приемопередатчик 28 может быть сконфигурирован для модуляции информацией несущей для передачи антенной(-ами) 25 и демодуляции информации, принимаемой через антенну(-ы) 25, для дальнейшей обработки другими элементами устройства 10. В других формах осуществления приемопередатчик 28 может быть способен к непосредственной передаче и приему сигналов или данных.
[00058] Процессор 22 может выполнить функции, связанные с работой устройства 10, включая, без ограничения, предварительное кодирование параметров усиления/фазы антенны, кодирование и декодирование отдельных битов, формирующих сообщение связи, форматирование информации и общее управление устройством 10, включающее процессы, связанные с управлением ресурсами связи.
[00059] В форме осуществления изобретения запоминающее устройство 14 хранит модули программного обеспечения, которые обеспечивают функциональные возможности, когда выполняются процессором 22. Модули могут содержать, например, операционную систему, которая обеспечивает функциональные возможности операционной системы для устройства 10. Запоминающее устройство может также хранить один или несколько функциональных модулей, таких как приложение или программа, чтобы обеспечивать дополнительные функциональные возможности для устройства 10. Компоненты устройства 10 могут быть реализованы аппаратными средствами или как любая подходящая комбинация аппаратных и программных средств.
[00060] В форме осуществления изобретения устройство 10 может управляться запоминающим устройством 14 и процессором 22 так, чтобы определять значения ARO в режиме TDD двумя наборами параметров {а1, b1, С1} и {а2, b2, С2}. В этой форме осуществления изобретения "а" и "b" используются, чтобы определять сжатие ресурсов PUCCH, и "С" используется как сдвиг для устранения конфликтов. Согласно форме осуществления изобретения {"a1", "b1", "С1"} и {"а2", "b2", "С2"} могут зависеть от индекса субкадра "m (0…М-1)" и комбинации {"а1", "b1", "С1"} и {"а2", "b2", "С2"} определяют два значения ARO, соответственно. В одной форме осуществления изобретения [а1, b1] может быть таким же, что и [а2, b2] с циклической интерпретацией С1 и С2. В другой форме осуществления изобретения [а1, b1] может отличаться от [а2, b2] со значениями С1 и С2, зависящами от того, перемещается ли ресурс HARQ-ACK для текущего субкадра в другой субкадр. В еще одной форма осуществления изобретения [а1, b1] может отличаться от [а2, b2] со значениями С1 и С2, циклически изменяющимися от субкадра к субкадру.
[00061] Другая форма осуществления изобретения может быть отнесена к способу для определения значений ARO в режиме TDD. Способ может включать определение значения ARO в режиме TDD двумя наборами параметров {а1, b1, С1} и {а2, b2, С2}. Согласно форме осуществления изобретения способ может включать использование "а" и "b" для определения сжатия ресурсов PUCCH, а также использование "С" для сдвига с целью устранения конфликтов. Согласно форме осуществления изобретения {"а1", "b1", "С1"} и {"а2", "b2", "С2"} могут зависеть от индекса субкадра "m (0…М-1)", и комбинации {"а1", "b1", "С1"} и {"а2", "b2", "С2"} определяют два значения ARO, соответственно. В одной форме осуществления изобретения [а1, b1] может быть таким же, что и [а2, b2] с циклической интерпретацией С1 и С2. В другой форме осуществления изобретения [а1, b1] может отличаться от [а2, b2] со значениями С1 и С2, зависящами от того, перемещается ли ресурс HARQ-ACK для текущего субкадра в другой субкадр. В еще одной форма осуществления изобретения [а1, b1] может отличаться от [а2, b2] со значениями С1 и С2, циклически изменяющимися от субкадра к субкадру.
[00062] Одним преимуществом согласно некоторым формам осуществления изобретения является то, что служебная информация PUCCH, связанная с каналом PDSCH, планируемым через канал EPDCCH может быть минимизирована. Служебная информация PUCCH является масштабируемой и незанятые ресурсы канала PUCCH могут полностью использоваться для канала PUSCH. Следует отметить, что служебная информация PUCCH является проблемой, специфической для системы с TDD. Если бы не было такого механизма, надстроенного поверх решения Rel-11 EPDCCH, то это означало бы, что канал EPDDCH приводил бы к большему объему служебной информации по сравнению с решением Rel-8.
[00063] Ввиду вышеизложенного в форме осуществления изобретения предлагается общее определение значения ARO в режиме TDD, которое применяется ко всем субкадрам в окне пакетирования и охватывает большинство целесообразных способов сжатия ресурсов. Агрессивное сжатие может быть достигнуто вариантом, показанным на фиг. 3, и конфликты далее устраняются круговой интерпретацией. Менее агрессивное сжатие может быть достигнуто вариантом, показанным на фиг. 4 и 5. Это является хорошим компромиссом между сжатием и динамическим смещением у различных субкадров.
[00064] В некоторых формах осуществления изобретения функциональные возможности любого из описанных здесь способов могут быть реализованы программным обеспечением и/или кодом компьютерной программы, хранящимся в запоминающем устройстве или на другом машиночитаемом или материальном носителе и выполняемым процессором. В других формах осуществления изобретения функциональные возможности могут выполняться аппаратными средствами, например, с помощью специализированной интегральной схемы (ASIC), программируемой вентильной матрицы (Programmable Gate Array, PGA), программируемой в условиях эксплуатации вентильной матрицей (FPGA) или любой другой комбинацией аппаратных и программных средств.
[00065] Специалистам обычной квалификации в данной области техники будет очевидно, что изобретение, которое рассмотрено выше, может применяться на практике с шагами в отличном порядке и/или с элементами аппаратных средств в конфигурациях, которые отличаются от тех, которые были раскрыты. Поэтому, хотя изобретение было описано на основании этих предпочтительных форм осуществления, специалистам в данной области техники будет очевидно, что некоторые модификации, изменения и альтернативные конструкции возможны в пределах сущности и объема изобретения. Поэтому, чтобы определить границы изобретения, необходимо обратиться к прилагаемой формуле изобретения.
Изобретение относится к заданию значений сдвига ресурса (ARO) в режиме дуплексной связи с временным разделением (TDD). Технический результат – устранение возможного конфликта ресурсов между несколькими наборами усовершенствованного физического канала управления нисходящей линии (EPDCCH), совместно использующими одну и ту же область ресурсов физического канала управления восходящей линии (PUCCH). Для этого способ включает задание значений сдвига ресурса подтверждения (Ack) / отрицательного подтверждения (Nack) (ARO) в режиме дуплексной связи с временным разделением (TDD) при помощи первого набора значений и второго набора значений. Первый набор значений содержит отрицательные значения и используется для определения сдвига ресурса подтверждения (ACK) гибридного автоматического запроса на повторную передачу (HARQ) так, чтобы HARQ-ACK передавался в ресурсах PUCCH, соответствующих другому субкадру нисходящей линии, и второй набор значений содержит значения между -2 и 2. 3 н. и 8 з.п. ф-лы, 6 ил. 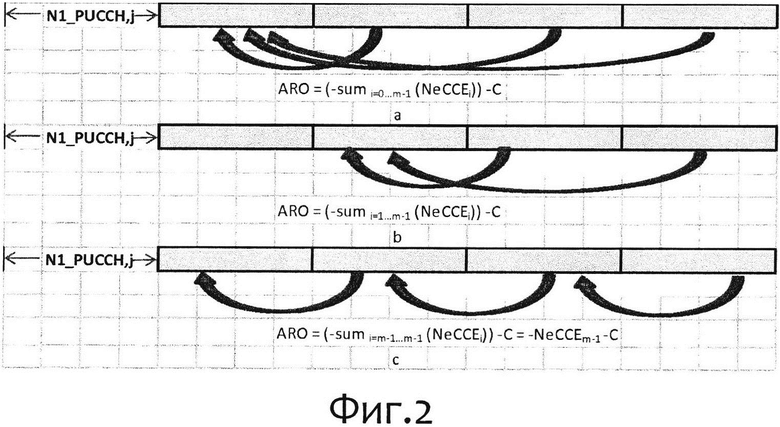
1. Способ сжатия ресурсов физического канала управления восходящей линии (PUCCH) у нескольких субкадров нисходящей линии связи (DL) в окне пакетирования, включающий:
задание значений сдвига ресурса (ARO) подтверждения (Ack) / отрицательного подтверждения (Nack) в режиме дуплексной связи с временным разделением (TDD) при помощи первого набора значений и второго набора значений;
причем первый набор значений содержит отрицательные значения и используется для определения сдвига ресурса подтверждения (ACK) гибридного автоматического запроса на повторную передачу (HARQ) так, чтобы HARQ-ACK передавался в ресурсах физического канала управления восходящей линии (PUCCH), соответствующих другому субкадру нисходящей линии, и
второй набор значений содержит значения между -2 и 2.
2. Способ по п. 1, в котором, когда m=0, значения ARO равны {0,-2,-1, 2}, где m - относительный индекс субкадра нисходящей линии физического совместно используемого канала нисходящей линии (PDSCH), планируемого усовершенствованным физическим каналом управления нисходящей линии (EPDCCH).
3. Способ по п. 1 или 2, в котором, когда m>0, по меньшей мере одно из первого набора значений позволяет выполнять сжатие подтверждений (ACK) гибридного автоматического запроса на повторную передачу (HARQ) в область ресурса физического канала управления восходящей линии (PUCCH), соответствующую субкадру n<m нисходящей линии, где m - относительный индекс субкадра нисходящей линии физического совместно используемого канала нисходящей линии (PDSCH), планируемого усовершенствованным физическим каналом управления нисходящей линии (EPDCCH).
4. Способ по п. 1 или 2, в котором по меньшей мере одно из первого набора значений приводит к подтверждениям (ACK) гибридного автоматического запроса на повторную передачу (HARQ), передаваемым в ресурсах физического канала управления восходящей линии (PUCCH), соответствующих по меньшей мере одному из субкадра n=0 нисходящей линии или субкадра n=1 нисходящей линии.
5. Способ по п. 1 или 2, в котором по меньшей мере одно из первого набора значений приводит к подтверждениям (ACK) гибридного автоматического запроса на повторную передачу (HARQ), передаваемым в ресурсах физического канала управления восходящей линии (PUCCH), соответствующих субкадру n=m-1 нисходящей линии, где m - относительный индекс субкадра нисходящей линии физического совместно используемого канала нисходящей линии (PDSCH), планируемого усовершенствованным физическим каналом управления нисходящей линии (EPDCCH).
6. Устройство для сжатия ресурсов физического канала управления восходящей линии (PUCCH) у нескольких субкадров нисходящей линии связи (DL) в окне пакетирования, содержащее:
средство для задания значений сдвига ресурса (ARO) подтверждения (Ack) / отрицательного подтверждения (Nack) в режиме дуплексной связи с временным разделением (TDD) при помощи первого набора значений и второго набора значений;
причем первый набор значений содержит отрицательные значения и используется для определения сдвига ресурса подтверждения (ACK) гибридного автоматического запроса на повторную передачу (HARQ) так, чтобы HARQ-ACK передавался в ресурсах физического канала управления восходящей линии (PUCCH), соответствующих другому субкадру нисходящей линии, и
второй набор значений содержит значения между -2 и 2.
7. Устройство по п. 6, в котором, когда m=0, значения ARO равны {0,-2,-1, 2}, где m - относительный индекс субкадра нисходящей линии физического совместно используемого канала нисходящей линии (PDSCH), планируемого усовершенствованным физическим каналом управления нисходящей линии (EPDCCH).
8. Устройство по п. 6 или 7, в котором, когда m>0, по меньшей мере одно из первого набора значений позволяет сжатие подтверждений (ACK) гибридного автоматического запроса на повторную передачу (HARQ) в область ресурса физического канала управления восходящей линии (PUCCH), соответствующую субкадру n<m нисходящей линии, где m – относительный индекс субкадра нисходящей линии физического совместно используемого канала нисходящей линии (PDSCH), распределяемого усовершенствованным физическим каналом управления нисходящей линии (EPDCCH).
9. Устройство по п. 6 или 7, в котором по меньшей мере одно из первого набора значений приводит к подтверждениям (ACK) гибридного автоматического запроса на повторную передачу (HARQ), передаваемым в ресурсах физического канала управления восходящей линии (PUCCH), соответствующих по меньшей мере одному из субкадра n=0 нисходящей линии или субкадра n=1 нисходящей линии.
10. Устройство по п. 6 или 7, в котором по меньшей мере одно из первого набора значений приводит к подтверждениям (ACK) гибридного автоматического запроса на повторную передачу (HARQ), передаваемым в ресурсах физического канала управления восходящей линии (PUCCH), соответствующих субкадру n=m-1 нисходящей линии, где m - относительный индекс субкадра нисходящей линии физического совместно используемого канала нисходящей линии (PDSCH), распределяемого усовершенствованным физическим каналом управления нисходящей линии (EPDCCH).
11. Машиночитаемый носитель, содержащий компьютерную программу, сконфигурированную для управления процессором так, чтобы выполнять способ по любому из пп. 1-5.
| УСТРОЙСТВО И СПОСОБ ПЕРЕРАСПРЕДЕЛЕНИЯ РЕСУРСОВ И ПЕРЕГРУППИРОВКИ В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2008 |
|
RU2454804C2 |
| СПОСОБ УПРАВЛЕНИЯ СХЕМОЙ H-ARQ В СИСТЕМЕ СВЯЗИ С ШИРОКОПОЛОСНЫМ РАДИОДОСТУПОМ | 2005 |
|
RU2340105C2 |
| ПАКЕТИРОВАНИЕ ИНФОРМАЦИИ АСК В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2009 |
|
RU2470467C2 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |

