ОБЛАСТЬ ТЕХНИКИ
Варианты выполнения изобретения, описанные здесь, в целом относятся к способам и устройствам, более конкретно, к механизмам и оборудованию для более точного регулирования входных направляющих лопаток турбомашин при меньшей прикладываемой силе.
УРОВЕНЬ ТЕХНИКИ В ОБЛАСТИ ИЗОБРЕТЕНИЯ
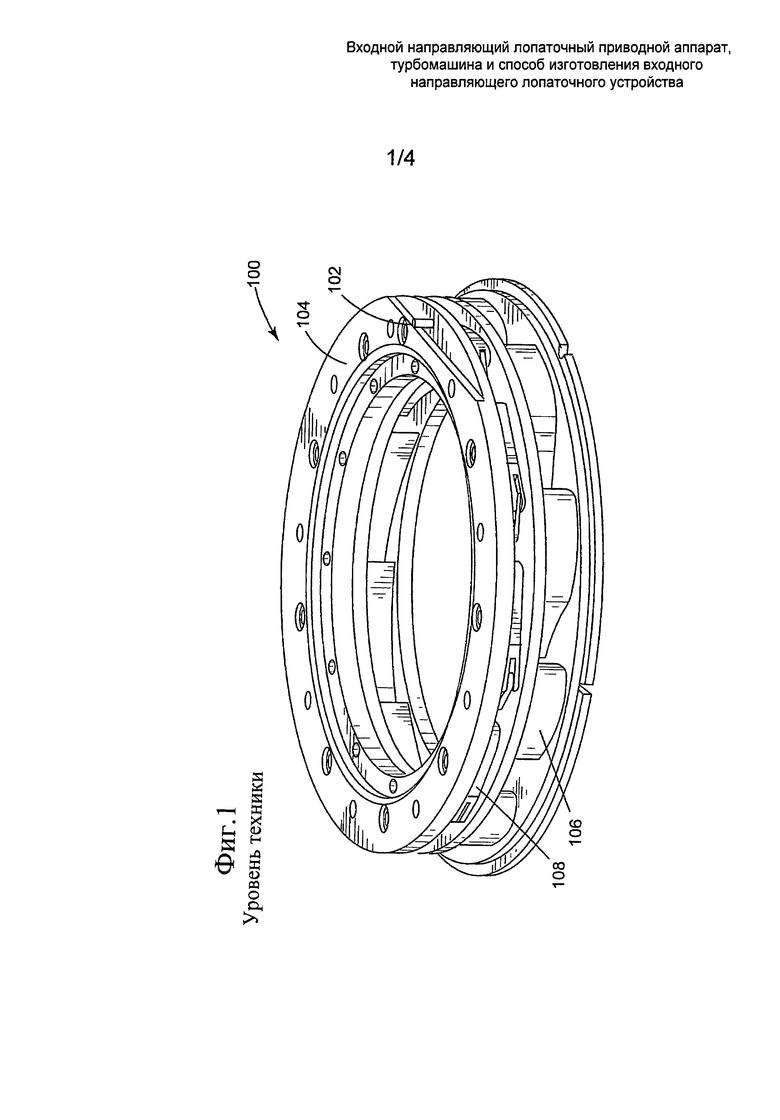
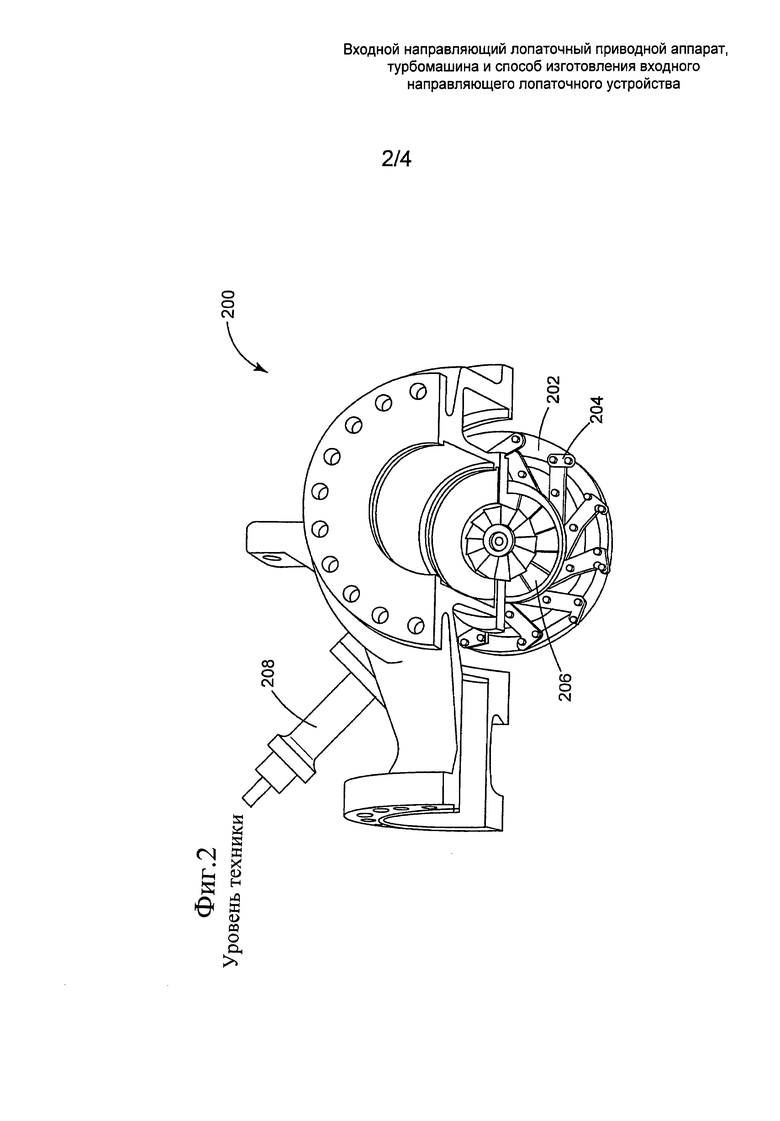
Турбомашины в целом имеют внутренние вращающиеся компоненты и обычно входной направляющий лопаточный аппарат, который, например, регулируется на основе рабочих условий турбомашины. В автоматической системе регулировка входного направляющего аппарата требует использования приводного устройства, прикрепленного к приводному стержню, соединенному с приводным кольцом, приводящим в движение четырехзвенный стержневой механизм, или щелевое сопло, поворачиваемое неподвижными штырями на приводном кольце. В существующих решениях входных направляющих аппаратов, как показано на фиг. 1, управляющие компоненты входного направляющего аппарата для регулирования лопаток расположены в различных параллельных плоскостях. Например, на фиг. 1 четырехзвенный стержневой механизм 108 находится на плоскости между плоскостью лопаток 106 и плоскостью приводного кольца 104, где приводной стержень соединен со штырем 102 на приводном кольце 104. В другом примере на фиг. 2, относящемся к уровню техники, показан входной направляющий аппарат, приводимый в движение щелевым соплом, с расположенными в различных плоскостях приводом 208, приводным кольцом 204 и рычагами, управляющими лопатками 206.
Существующие в настоящее время конструкции имеют несколько проблем, возникающих во время работы. Что касается четырехзвенной стержневой системы, сила, прикладываемая для регулирования лопаток, находится в иной плоскости, чем приводное кольцо и четырехзвенный стержневой механизм, и, следовательно, несимметрично приложена, по отношению к втулкам и точкам соединения между приводным стержнем, приводным кольцом и четырехзвенным стержневым механизмом. Соответственно, на приводном стержне возникает изгибающая сила, увеличивающая силу, необходимую для поворота приводного кольца и мешающая соединительным компонентам. Подобным же образом, щелевое сопло, как показано на фиг. 2, развивает износ направляющего кольца, приводящий к повышенным силовым требованиям к приводу, заеданию и увеличению неустойчивости. Для обоих механизмов желательная характеристика будет также включать более компактную конструкцию входного направляющего аппарата, ведущую как к уменьшению массы, так и к уменьшению силы, необходимой для регулирования входного направляющего аппарата. Подробное описание конструкции и работы известного входного направляющего аппарата представлено в заявке на патент США №12/415,417, включенной а настоящее описание посредством ссылки.
Соответственно, имеется потребность в создании устройств и способов, которые позволяют избежать вышеописанные проблемы и недостатки.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Вышеуказанные недостатки известных конструкций входного направляющего аппарата устранены в предложенном изобретении.
В соответствии с одним аспектом настоящего изобретения предложен входной направляющий лопаточный приводной аппарат, содержащий приводное кольцо, имеющее первый соединитель, предназначенный для присоединения приводного стержня и выполненный таким образом, что он обеспечивает расположение указанного приводного стержня в плоскости, проходящей через середину осевой ширины кольца, кривошипные стержни, первые концы которых присоединены к соответствующим вторым соединителям на приводном кольце таким образом, что указанные кривошипные стержни расположены в указанной плоскости, проходящей через середину осевой ширины кольца, и кривошипные рычаги, каждый из которых имеет третий соединитель, присоединенный, соответственно, ко второму концу соответствующего кривошипного стержня и, соответственно, к лопаткам, связанным с соплом, причем указанные третьи соединители обеспечивают расположение указанных кривошипных рычагов в указанной плоскости, проходящей через середину осевой ширины кольца.
Кривошипные рычаги присоединены к указанным лопаткам шлицевым соединением, отцентрованным втулкой. Второй соединитель на указанном первом конце указанных кривошипных стержней и третий соединитель на их указанном втором конце отцентрированы, соответственно, соответствующими втулками.
Приводное кольцо может поворачиваться либо по часовой стрелке, либо против часовой стрелки в зависимости от направления движения приводного стержня.
Предложенный входной направляющий лопаточный приводной аппарат выполнен с меньшими размерами, чем аппарат, в котором компоненты четырехзвенного стержневого механизма распределены по двум или более поворотным осевым плоскостям.
В предложенном входном направляющем лопаточном приводном аппарате необходимая для его работы сила меньше, чем сила, требуемая для работы аппарата, в котором компоненты четырехзвенного стержневого механизма распределены по двум или более поворотным осевым плоскостям.
В соответствии с другим аспектом настоящего изобретения предложена турбомашина, содержащая кожух, в котором заключены ее компоненты, рабочие лопатки, установленные на вращающемся валу, связанном с указанным кожухом, неподвижные лопатки, установленные в указанном кожухе, впускной патрубок, обеспечивающий возможность поступления рабочей текучей среды, выпускной патрубок, обеспечивающий возможность выхода рабочей текучей среды. Кроме того, указанная турбомашина содержит входной направляющий лопаточный приводной аппарат, содержащий приводное кольцо, имеющее первый соединитель, предназначенный для присоединения приводного стержня и выполненный таким образом, что он обеспечивает расположение указанного приводного стержня в плоскости, проходящей через середину осевой ширины кольца, кривошипные стержни, первые концы которых присоединены к соответствующим вторым соединителям на приводном кольце таким образом, что указанные кривошипные стержни расположены в указанной плоскости, проходящей через середину осевой ширины кольца, кривошипные рычаги, каждый из которых имеет третий соединитель, присоединенный, соответственно, ко второму концу соответствующего кривошипного стержня и, соответственно, к лопаткам, связанным с соплом, причем указанные третьи соединители обеспечивают расположение указанных кривошипных рычагов в указанной плоскости, проходящей через середину осевой ширины кольца.
В соответствии с еще одним аспектом настоящего изобретения предложен способ изготовления входного направляющего лопаточного приводного аппарата турбомашины, включающий этапы, на которых присоединяют первый конец приводного стержня к приводному кольцу, связанному с указанной турбомашиной, причем приводной стержень располагают в плоскости, проходящей через середину осевой ширины кольца, присоединяют первый конец каждого из множества кривошипных стержней к соответствующему соединителю на приводном кольце, причем указанные кривошипные стержни располагают в указанной плоскости, проходящей через середину осевой ширины кольца, присоединяют ко второму концу каждого из указанных кривошипных стержней каждый из множества кривошипных рычагов, который присоединяют также к соответствующей лопатке, связанной с указанной турбомашиной, причем указанные кривошипные рычаги располагают в указанной плоскости, проходящей через середину осевой ширины кольца.
В предложенном изобретении приводной стержень, кривошипные стержни и кривошипные рычаги входного направляющего аппарата лежат в одной плоскости, проходящей через середину осевой ширины приводного кольца, в связи с чем входной направляющий лопаточный приводной аппарат образован совокупностью расположенных в одной плоскости четырехзвенных стержневых механизмов. Такая конфигурация обеспечивает более компактную конструкцию входного направляющего аппарата, позволяющую уменьшить усилие, необходимое для регулирования входного направляющего аппарата, и устранить изгибающее усилие, снижая тем самым опасность заклинивания сопловых лопаток и повышая точность и надежность работы входного направляющего аппарата. Кроме того, входной направляющий аппарат заявленной конструкции имеет меньшую массу по сравнению с известными устройствами.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Сопровождающие чертежи, приложенные к описанию, иллюстрируют один или более вариантов выполнения и вместе с описанием объясняют эти варианты выполнения. На чертежах:
Фиг. 1 изображает известный примерный вариант выполнения четырехзвенного входного направляющего аппарата для турбомашины с рабочими компонентами, расположенными в разных плоскостях;
Фиг. 2 изображает известный примерный вариант выполнения входного направляющего аппарата со щелевым соплом для турбомашины с рабочими компонентами, расположенными в разных плоскостях;
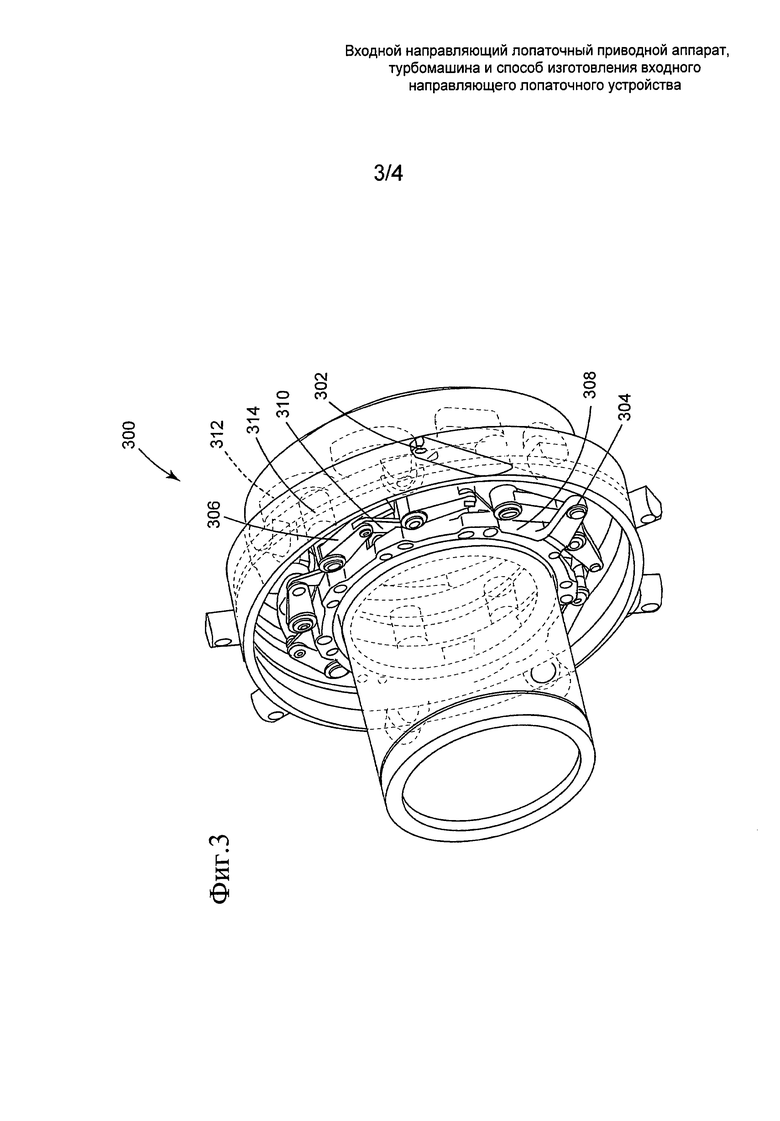
Фиг. 3 изображает примерный вариант выполнения компактного входного направляющего аппарата для турбомашины, расположенного в одной плоскости, с рабочими компонентами, расположенными в этой же плоскости;
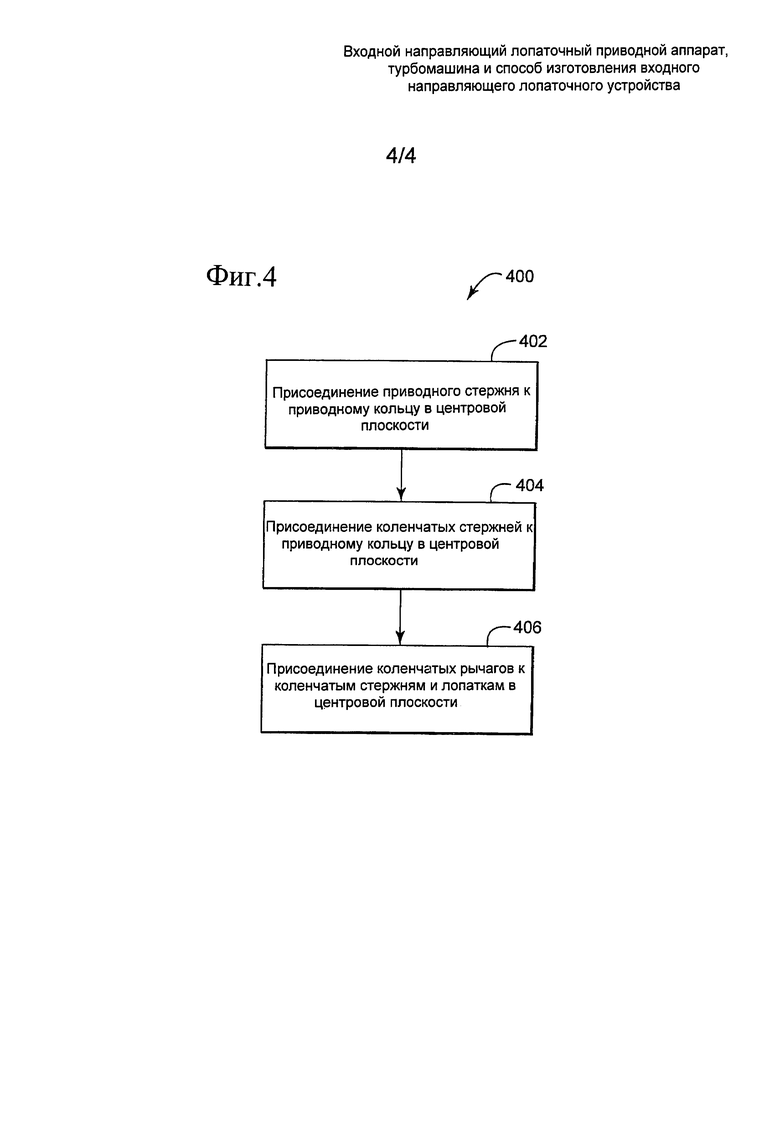
Фиг. 4 изображает блок-схему, иллюстрирующую этапы работы лежащего в одной плоскости входного направляющего аппарата, интегрированного с турбомашиной, согласно примерному варианту выполнения.
ПОДРОБНОЕ ОПИСАНИЕ
Следующее описание примерных вариантов выполнения сделано со ссылкой на приложенные чертежи. Одинаковые номера позиций на различных чертежах обозначают одинаковые или подобные элементы. Следующее подробное описание не ограничивает изобретение. Объем изобретения определяется формулой изобретения. Следующие варианты выполнения обсуждаются, для простоты, применительно к терминологии и конструкции турбомашины, содержащей, без ограничения, компрессор и детандер (расширитель). Турбомашина обычно содержит кожух, вращающийся вал, рабочие лопатки, прикрепленные к вращающемуся валу, неподвижные лопатки, прикрепленные к кожуху, патрубок для обеспечения возможности поступления рабочей среды в турбомашину и патрубок для обеспечения возможности выхода рабочей среды из турбомашины.
Ссылка в описании на "один вариант выполнения" или "вариант выполнения" означает, что конкретное свойство, конструкция или характеристика, описанная в связи с вариантом выполнения, включена, по меньшей мере, в один вариант выполнения изобретения. Таким образом, появление выражений "в одном варианте выполнения" или "в варианте выполнения" в различных местах описания не обязательно относится к одному и тому же варианту выполнения. Кроме того, конкретные свойства, конструкции или характеристики могут комбинироваться любым подходящим способом в одном или более вариантах выполнения.
Как показано на фиг. 3, примерный вариант выполнения показывает компактный входной направляющий аппарат 300. В одном аспекте примерного варианта выполнения приводной стержень 302 присоединен к приводному кольцу 308 в центральной точке кольца 308 по отношению к осевой ширине кольца 308. Примерный вариант выполнения показывает два кронштейна 304, проходящие в наружном радиальном направлении от кольца 308. На каждом краю кольца 308 расположено по одному кронштейну 304 с созданием пространства между кронштейнами 304 для присоединения приводного стержня, расположенного в центральном положении относительно приводного кольца. Следует отметить в примерном варианте выполнения, что через отверстие в приводном стержне и в каждом кронштейне 304 проходит штырь, позволяющий стержню 302 поворачиваться относительно кронштейнов 304.
Также в примерном варианте выполнения, когда приводной стержень 302 приводится в движение приводом, сила, проходящая по центру приводного кольца 308, прикладывается приводным стержнем 302 к приводному кольцу 308 и кольцо 308 поворачивается либо по часовой стрелке, либо против часовой стрелки, в зависимости от направления движения стержня 302. В другом аспекте примерного варианта выполнения поворот кольца 308 приводит в движение кривошипные стержни 310, которые присоединены к кольцу 308 на одном конце и к обычному кривошипному рычагу 306 на другом конце. Следует заметить, что в примерном варианте выполнения обычный кривошипный стержень 310, как и приводной стержень 302, расположен на приводном кольце 308 по центру относительно осевой ширины кольца 308.
Кроме того, следует заметить, что в примерном варианте выполнения кривошипный рычаг 306 имеет точку соединения для приводного стержня 302 аналогично конструкции, описанной выше применительно к соединительной точке приводного кольца 308 для приводного стержня 302, где сила, прикладываемая приводным кольцом 308 к кривошипному стержню 310 и кривошипным стержнем 310 к кривошипному рычагу 306, находится в осевой центральной плоскости приводного кольца 308. В свою очередь, кривошипный рычаг 306 соединен через обычное шлицевое соединение 314 с сопловой лопаткой 312, и, когда кривошипный рычаг 306 поворачивается, сопловая лопатка 312 перемещается в необходимое положение на пути рабочей среды.
Соответственно, примерный вариант выполнения описывает приложение силы к приводному стержню 302 и передачу этой силы через различные управляющие и рычажные механизмы, все расположенные в одной осевой плоскости в осевом центре кольца 308, достигая максимума поворотной силы, перемещающей сопловые лопатки 312 в требуемое положение. На основе конструкции с приложением силы в одной осевой плоскости требуется меньшая сила для создания требуемого перемещения в сопловых лопатках 312 и возможность заедания сопловых лопаток уменьшается, так как изгибающая сила в точках соединения и втулках, связанная с передачей приложенной силы через механизм, распределенный во многих осевых плоскостях, устранена.
Вариант выполнения примерного способа изготовления входного направляющего аппарата описан ниже со ссылкой на фиг. 4. Фиг. 4 показывает этапы варианта выполнения примерного способа соединения компонентов входного направляющего аппарата, в котором, например, и без ограничения, потери на трение и связи в точках соединения уменьшаются, и дополнительно может быть улучшена точность регулирования, так как можно избежать несоосности приводного стержня. Примерный вариант выполнения способа включает этап 402 присоединения приводного стержня 302 к кольцу 308. В одном аспекте примерного варианта выполнения способа кольцо 308 имеет точку соединения, обеспечивающую возможность соединения приводного стержня 302 между двумя симметрично расположенными кронштейнами 304. Далее в примерном варианте выполнения способа, узел из штыря и втулки вставляют через один кронштейн 304, приводной стержень 302 и затем другой кронштейн 304. В другом аспекте примерного варианта выполнения способа, монтажное положение, обеспечиваемое симметричными кронштейнами 304, размещает приводной стержень 302 в плоскости, соответствующей поворотному осевому центру кольца 308.
За этапом 404 примерного варианта выполнения способа, к каждому соединителю на приводном кольце 308 присоединяют соответственно один конец соответствующего кривошипного стержня 310. Следует заметить, что в примерном варианте выполнения способа кривошипные стержни 310 могут поворачиваться вокруг точки соединения при повороте кольца 308. В другом аспекте примерного варианта выполнения способа, монтажное положение, обеспечиваемое точками соединения на приводном кольце 308, размещает кривошипные стержни 310 в плоскости, соответствующей поворотному осевому центру кольца 308.
На следующем этапе 406 примерного варианта выполнения способа, ко второму концу каждого кривошипного стержня 310 присоединяют соответствующий кривошипный рычаг 306. Следует заметить, что в примерном варианте выполнения способа кривошипные стержни 310 могут поворачиваться вокруг точки соединения на соответствующих кривошипных рычагах при повороте кольца 308. В другом аспекте примерного варианта выполнения способа каждый кривошипный рычаг 306 также присоединяют к соответствующей лопатке 312, связанной с турбомашиной. В следующем аспекте примерного варианта выполнения способа, монтажное положение, обеспечиваемое точками соединения на кривошипных стержнях, размещает кривошипные рычаги 306 в плоскости, соответствующей поворотному осевому центру кольца 308.
Описанные примерные варианты выполнения предлагают устройство и способ интеграции привода в турбомашину и работу привода на основе градиента давления рабочей среды через турбомашину. Следует понимать, что это описание не ограничивает изобретение. Напротив, примерные варианты выполнения должны охватывать альтернативы, модификации и эквиваленты, которые включены в сущность и объем изобретения, определенные формулой изобретения. Кроме того, в подробном описании примерных вариантов выполнения многочисленные конкретные детали приводятся для обеспечения полного понимания заявленного изобретения. Однако специалисту понятно, что возможно осуществление различных вариантов выполнения без таких конкретных деталей.
Хотя свойства и элементы настоящих примерных вариантов выполнения описаны в вариантах в конкретных комбинациях, каждый признак или элемент может быть использован отдельно без других признаков и элементов вариантов или в различных комбинациях с другими признаками и элементами, описанными здесь, или без них. В этом описании используются примеры для пояснения изобретения, включая лучший вариант выполнения, а также для обеспечения возможности любому специалисту осуществить изобретение, включая изготовление и применение любых устройств или систем и выполнение любых входящих сюда способов. Объем изобретения определяется формулой изобретения, и оно может включать другие примеры, очевидные специалистам. Предполагается, что такие примеры находятся в рамках формулы изобретения, если они имеют структурные элементы, которые не отличаются от буквального языка формулы изобретения, или если они включают структурные элементы, эквивалентные элементам, упоминаемым в буквальных формулировках формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦЕНТРИРУЮЩЕЕ УСТРОЙСТВО, ВХОДНОЙ НАПРАВЛЯЮЩИЙ ЛОПАТОЧНЫЙ АППАРАТ И ТУРБОМАШИНА | 2011 |
|
RU2562503C2 |
| ЛОПАТКИ РЕГУЛИРУЕМОГО ВХОДНОГО НАПРАВЛЯЮЩЕГО АППАРАТА ДЛЯ ТУРБОМАШИНЫ, СОДЕРЖАЩАЯ ИХ ТУРБОМАШИНА И СПОСОБ | 2023 |
|
RU2837808C2 |
| Входной направляющий лопаточный аппарат | 2015 |
|
RU2699863C2 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ НАПРАВЛЯЮЩИХ ЛОПАТОК И ТУРБОМАШИНА | 2016 |
|
RU2666260C1 |
| Входной направляющий аппарат турбомашины | 1982 |
|
SU1084470A1 |
| РЕГУЛИРУЕМЫЙ ВХОДНОЙ НАПРАВЛЯЮЩИЙ АППАРАТ | 2023 |
|
RU2814582C1 |
| НАПРАВЛЯЮЩИЙ АППАРАТ ДЛЯ ТУРБОМАШИНЫ, ТУРБОМАШИНА И СПОСОБ СБОРКИ НАПРАВЛЯЮЩЕГО АППАРАТА | 2011 |
|
RU2582382C2 |
| Диффузорный лопаточный направляющий аппарат центробежной турбомашины | 1987 |
|
SU1597449A1 |
| Регулируемый направляющий аппарат лопаточной турбомашины | 1977 |
|
SU631666A1 |
| ЛОПАТОЧНЫЙ АППАРАТ С ОТВЕТВЛЕНИЯМИ НА КОЖУХЕ КОМПРЕССОРА ОСЕВОЙ ТУРБОМАШИНЫ И ТУРБОМАШИНА | 2015 |
|
RU2697296C2 |
Группа изобретений относится к входному направляющему лопаточному приводному аппарату, турбомашине и способу изготовления входного направляющего лопаточного приводного аппарата турбомашины. Компоненты входного направляющего аппарата 300, включающие приводной стержень 302, приводное кольцо 308, кривошипные стержни 310, кривошипные рычаги 306 и присоединенные соединители и втулки, собраны в одной плоскости. В этом отношении, когда сила прикладывается к приводному стержню 302 и передается через компоненты входного направляющего аппарата 300, эта сила действует в одной плоскости. Кроме того, эта плоскость отцентрована по поворотному центру приводного кольца 308 в осевом направлении. Группа изобретений направлена на обеспечение более точного регулирования входных направляющих лопаток турбомашины при меньшей прикладываемой силе. 3 н. и 6 з.п. ф-лы, 4 ил.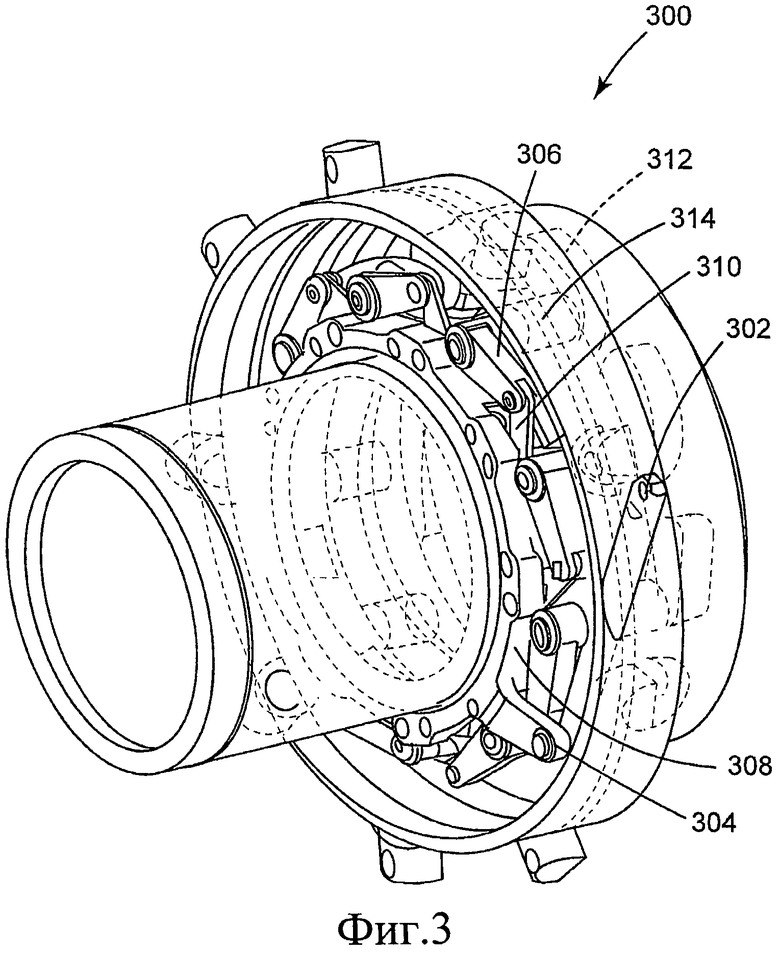
1. Входной направляющий лопаточный приводной аппарат, содержащий:
приводное кольцо, имеющее первый соединитель, предназначенный для присоединения приводного стержня и выполненный таким образом, что он обеспечивает расположение указанного приводного стержня в плоскости, проходящей через середину осевой ширины кольца,
кривошипные стержни, первые концы которых присоединены к соответствующим вторым соединителям на приводном кольце таким образом, что указанные кривошипные стержни расположены в указанной плоскости, проходящей через середину осевой ширины кольца,
кривошипные рычаги, каждый из которых имеет третий соединитель, присоединенный, соответственно, ко второму концу соответствующего кривошипного стержня и, соответственно, к лопаткам, связанным с соплом, причем указанные третьи соединители обеспечивают расположение указанных кривошипных рычагов в указанной плоскости, проходящей через середину осевой ширины кольца.
2. Входной направляющий лопаточный приводной аппарат по п. 1, в котором кривошипные рычаги присоединены к указанным лопаткам шлицевым соединением.
3. Входной направляющий лопаточный приводной аппарат по п. 2, в котором шлицевое соединение отцентровано втулкой.
4. Входной направляющий лопаточный приводной аппарат по п. 1, в котором приводное кольцо поворачивается либо по часовой стрелке, либо против часовой стрелки в зависимости от направления движения приводного стержня.
5. Входной направляющий лопаточный приводной аппарат по п. 1, который меньше по размерам, чем аппарат, в котором компоненты четырехзвенного стержневого механизма распределены по двум или более поворотным осевым плоскостям.
6. Входной направляющий лопаточный приводной аппарат по п. 1, в котором необходимая для его работы сила меньше, чем сила, требуемая для работы аппарата, в котором компоненты четырехзвенного стержневого механизма распределены по двум или более поворотным осевым плоскостям.
7. Входной направляющий лопаточный приводной аппарат по п. 1, в котором второй соединитель на указанном первом конце указанных кривошипных стержней и третий соединитель на их указанном втором конце отцентрированы, соответственно, соответствующими втулками.
8. Турбомашина, содержащая:
кожух, в котором заключены ее компоненты,
рабочие лопатки, установленные на вращающемся валу, связанном с указанным кожухом,
неподвижные лопатки, установленные в указанном кожухе,
впускной патрубок, обеспечивающий возможность поступления рабочей текучей среды,
выпускной патрубок, обеспечивающий возможность выхода рабочей текучей среды,
входной направляющий лопаточный приводной аппарат, содержащий:
приводное кольцо, имеющее первый соединитель, предназначенный для присоединения приводного стержня и выполненный таким образом, что он обеспечивает расположение указанного приводного стержня в плоскости, проходящей через середину осевой ширины кольца,
кривошипные стержни, первые концы которых присоединены к соответствующим вторым соединителям на приводном кольце таким образом, что указанные кривошипные стержни расположены в указанной плоскости, проходящей через середину осевой ширины кольца,
кривошипные рычаги, каждый из которых имеет третий соединитель, присоединенный, соответственно, ко второму концу соответствующего кривошипного стержня и, соответственно, к лопаткам, связанным с соплом, причем указанные третьи соединители обеспечивают расположение указанных кривошипных рычагов в указанной плоскости, проходящей через середину осевой ширины кольца.
9. Способ изготовления входного направляющего лопаточного приводного аппарата турбомашины, включающий этапы, на которых
присоединяют первый конец приводного стержня к приводному кольцу, связанному с указанной турбомашиной, причем приводной стержень располагают в плоскости, проходящей через середину осевой ширины кольца,
присоединяют первый конец каждого из множества кривошипных стержней к соответствующему соединителю на приводном кольце, причем указанные кривошипные стержни располагают в указанной плоскости, проходящей через середину осевой ширины кольца,
присоединяют ко второму концу каждого из указанных кривошипных стержней каждый из множества кривошипных рычагов, который присоединяют также к соответствующей лопатке, связанной с указанной турбомашиной, причем указанные кривошипные рычаги располагают в указанной плоскости, проходящей через середину осевой ширины кольца.
| DE 19717855 A1, 12.11.1998 | |||
| US 2009022581 A1, 22.01.2009 | |||
| СПОСОБ ПОЛУЧЕНИЯ ПЕКТИНА | 2002 |
|
RU2236792C2 |
| Направляющий аппарат турбомашины | 1976 |
|
SU630954A1 |
| DE 102006053332 A1, 15.05.2008. | |||

