Изобретение относится к боевым наземным мобильным устройствам, условно называемым «боевыми роботами», и предназначено для уничтожения и демаскировки противника на поле боя.
Известны подобные устройства на различных шасси, см., например, пат. №2544434, с различным набором вооружения, в основном для разминирования.
Задача и технический результат изобретения - введение противника в заблуждение и уничтожение его на поле боя.
Опыт боевых действие Сирийских войск против ИГИЛ показал, что часто противники находятся в нескольких сотнях или в нескольких десятках метров друг от друга, но никаких активных действий не предпринимают, так как разделяющее их пространство простреливается всеми видами оружия, в том числе противотанкового.
История развивается по спирали, и при сложившемся уровне техники и вооружения стал интересен опыт немецко-фашистских войск 1945 года. Тогда для поражения советских укреплений и танков они применили взрывающиеся мини-танкетки, управляемые по проводам или по радио. Современные зарубежные тенденции подтверждают стремление конструкторов создать полноценный боевой робот в виде колесного, гусеничного или шагающего транспортного средства.
Однако потери таких боевых роботов (далее «роботов») на поле боя ожидаются очень большими. Поэтому задача и технический результат данного изобретения - создание комплекта боевых роботов идентичного внешнего вида, но одни роботы будут полнофункциональными, назовем их «основными», а вторые малофункциональными, но зато предельно дешевыми «имитаторами».
Кстати, у роботов выявился оптимальный размер: ширина - 55 см (чтобы проехать в любую дверь). И длина горизонтальной части гусеничного шасси 75 см (чтобы въезжать на стандартные лестницы. Высота ограничивается лишь соображениями устойчивости.
На конструкции основного робота подробно останавливаться не стоит ввиду множества равнозначных вариантов. Предлагается резиногусеничное шасси с упомянутыми размерами, вращающаяся башня, простейший пистолет-пулемет с круглым магазином не менее чем на 100 патронов или с ленточным питанием и/или огнемет. Желательны на передней части башни 4 гнезда для метания стандартных гранат Ф-1, и несколько инфракрасных камер, в том числе одна - сопряженная с пистолет-пулеметом. Для возможности движения предполагаются два электродвигателя, аккумулятор и помехозащищенная система радиоуправления.
Бронирование основного робота и его имитатора должно выдерживать попадание в упор 12,7-мм бронебойной пули.
Больший интерес представляет, как минимизировать и удешевить состав имитатора.
Данный имитатор содержит два электродвигателя постоянного тока высокого напряжения - около 220 вольт (это близко к амплитудному значению стандартной сети 220 В 50 Гц., - 345 В, что позволяет питать имитатор через кабель от простого сетевого выпрямителя или от аккумулятора напряжением 350-360 В (надо учесть внутренние потери в аккумуляторе и потери в проводах). Можно использовать массовые дешевые двигатели от электродрелей, электропил, электрорубанков, перфораторов и т.п. От них же можно использовать элементы редуктора.
Для управления скоростью движения можно использовать тиристорные регуляторы мощности - опять же штатные массовые такие регуляторы от электродрелей и т.п. причем в основном роботе и в имитаторе нужно использовать одинаковые электроэлементы, даже одинаковые аккумуляторы (только в основном роботе аккумулятор внутри, а в имитаторе он находится в пульте управления). Это полезно для ремонтопригодности. Регуляторы мощности позволяют проходить повороты по любому радиусу и с полной скоростью, что затрудняет поражение робота из гранатомета.
Для упрощения конструкции пистолет-пулемет не имеет наводки, всегда направлен примерно вперед, но имеет пружинную вертикальную подвеску, постоянно направленную горизонтально, но имеющую возможность отклоняться вверх или вбок от действия отдачи пистолет-пулемета.
Возможно, эффективнее пистолет-пулемета в таких условиях будет огнемет.
Для возможности подрыва укреплений, бронетехники и живой силы противника имитатор может содержать заряд взрывчатого вещества.
Для имитатора предлагается предельно простая электрическая схема управления, передающая все нужные сигналы по 4 проводам. Она содержит в удаленном пульте управления выпрямитель или аккумулятор с ключами коммутации левого и правого двигателей имитатора, с переключателями перемены полярности питания, соединенные тремя проводниками с имитатором, и содержит электропривод пистолет-пулемета и взрывного заряда, соединенный одним проводом с имитатором, причем этот провод и средний провод электродвигателей соединены с пистолет-пулеметом и со взрывным зарядом через две цепи с разнонаправленными диодами.
Эта схема не позволяет использовать режим движения гусениц «враздрай» (то есть одна вперед, другая назад). Это не очень существенно, так как имитатору без этого режима вполне можно обойтись, однако для возможности реализации такого движения удаленный пульт управления просто должен иметь не один, а два гальванически развязанных выпрямителя или два аккумулятора, подключаемые порознь. Правда, при этом есть один нюанс - во время «раздрая» лучше не пользоваться кнопкой пистолет-пулемета, так как в зависимости от направления «раздрая» может сработать взрыв.
Для снабжения имитатора электричеством он имеет сзади на вертикальном шарнире (то есть на шарнире с вертикальной осью вращения) цилиндрическую или торцевую катушку с кабелем (торцевая катушка - аналог катушки безинерционной спиннинговой рыболовной катушки). Кстати, такую же катушку для сходства с имитатором должен иметь и основной вариант робота. Причем она служит не только для маскировки - основной робот получает по ней питание до тех пор, пока не кончится или не будет перебит кабель, после чего кабель, подсоединенный штекером, просто выдергивается сам, а робот продолжает движение на аккумуляторе.
Назначение имитатора состоит в том, чтобы противник израсходовал на их уничтожение весь запас противотанковых средств, а также для того, чтобы во время обстрела имитаторов противник обнаружил себя и «подставился» под выстрел снайпера. Поле этого в бой можно пустить основные роботы. Действовать они должны, как это и вообще принято в военном деле, группами, прикрывая друг друга, не менее 6-7 роботов в тактической группе.
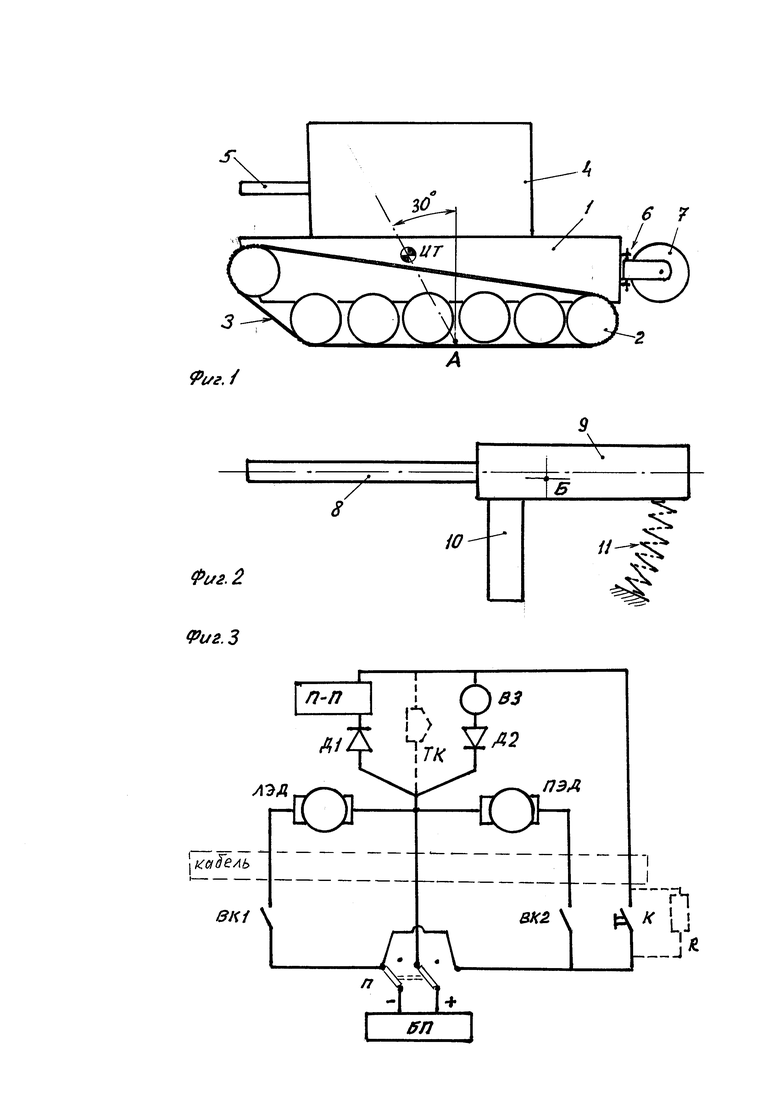
На фиг. 1 показан примерный вид робота, на фиг.2 показана пружинная подвеска пистолет-пулемета в варианте с отклонением вверх, на фиг. 3 показана электрическая схема управления имитатором с одним аккумулятором (схема с двумя аккумулятора не иллюстрируется ввиду понятности).
Робот (и основной, и имитатор должны иметь абсолютно одинаковый внешний вид, вплоть до наличия ложных объективов телекамер и ложных лючков для гранат на имитаторе) состоит из корпуса 1 с шестью расположенными в ряд катками 2 и с одним, вынесенным вперед катком с каждой стороны. Желательно, чтобы центр тяжести находился на линии, отклоненной вперед на 30 градусов от середины опорной каткой площадки - от точки «A». Тогда роботу легче будет взбираться по лестницам. Катки не подрессорены, а просто надеты на соответствующие оси. И вообще, так как робот - расходный материал, все сделано предельно просто.
На катках имеются резино-тканевые гусеницы 3. В качестве армирующей ткани желательно взять современное прочное волокно, например вектран, кевлар, спектра, дайнима, зайлон и т.п.
На корпусе 1 имеется башня 4 (на основном роботе - вращающаяся, на имитаторе - неподвижная) с пистолет-пулеметом или огнеметом 5.
Сзади имеется шарнир с вертикальной осью 6 и цилиндрическая или торцевая катушка 7 с кабелем (показана цилиндрическая).
Кабель должен быть четырехжильным, с сечением в форме ромба.
Пистолет-пулемет 5 на фиг. 2 состоит из ствола 8, затворного кожуха 9 и дискового магазина 10. Пистолет-пулемет закреплен шарнирно на оси «Б», расположенной чуть ниже вектора отдачи, и подпружинен пружиной 11.
Электрическая схема управления на фиг. 3 содержит: блок питания БП, соединенный с переключателем полярности П («вперед-нейтраль-назад»), соединенный двумя проводами с выключателями левого и правого двигателей ВК1 и ВК2, и далее - с левым и правым электродвигателями ЛЭД и ПЭД. Средняя точка переключателя полярности соединена с двумя электродвигателями и с двумя обратно включенными диодами Д1 и Д2, а через диоды соответственно - с электромагнитом пистолет-пулемета П-П и взрывателем ВЗ. Один из проводов с переключателя полярности через кнопку K соединен с упомянутыми электромагнитом и взрывателем.
Для простоты показана схема без тиристорных регуляторов мощности.
Высокочастотный сигнал с одной телекамеры (практически радиосигнал) передается по среднему проводу. Если одного провода окажется недостаточно, можно передавать его и еще по одному проводу, шунтировав выключатель ВК1, или ВК2, или кнопку K высокоомным сопротивлением (чтобы не сработал двигатель, пулемет или взрыватель). Этот вариант показан на фиг. 3 пунктиром: телекамера ТК и резистор R. Телекамера питается от небольшого аккумулятора, который может подзаряжаться через ту же высокоомную цепь с резистором R. Необходимо, чтобы электромагнит П-П и взрыватель ВЗ имели искусственно завышенный ток срабатывания. Телекамеру, аккумулятор для нее и зарядное устройство можно использовать массовые и дешевые от мобильных телефонов.
Работает имитатор так: переключатель полярности П включается из нейтрального положения в показанное на фиг. 3, и выключателями ВК1 и ВК2 включаются обе гусеницы «вперед». Во время движения или остановки нажатием кнопки K включается электромагнит П-П пистолет-пулемета или огнемета. Ток при этом проходит по среднему проводу, затем через диод Д1 и через электромагнит и кнопку П на клемму «минус» на переключателе П.
Переключением переключателя полярности П вправо можно включить «задний ход» и, управляя выключателями ВК1 и ВК2, включать обе гусеницы или по одной.
При необходимости самоподрыва переключатель П включается на «задний ход» и нажимается кнопка К. Так как полярность цепи поменялась на обратную, то ток пойдет через диод Д2 и взрыватель ВЗ.
При стрельбе из пистолета-пулемета 5 (см. фиг. 2) вектор отдачи, проходящий выше поперечной оси вращения «Б», с каждым выстрелом откидывает пистолет-пулемет назад, сжимая пружину 11. После прекращения стрельбы пружина 11 возвращает пистолет-пулемет назад в положение, близкое к горизонтальному. Рекомендуется стрельба короткими очередями.
Возможен и другой вариант - ось вращения «Б» расположена вертикально чуть сбоку от вектора отдачи, а пружина 11 также расположена с этого боку. Тогда пистолет-пулемет будет стрелять короткими горизонтальными очередями.
Применение имитатора представляется таким: зигзагами он приближается к позициям противника, заставляя его тратить (и промахиваться) противотанковые средства. Вражеские бойцы при этом будут демаскировать себя и «подставляться» под выстрел снайпера. В этих двух функциях основное назначение имитатора.
Если все же ему удастся доехать до позиций противника, он может заехать с фланга, заехать в здание, даже на этажи, даже в комнату и обстрелять или облить из огнемета находящихся там врагов. Если оператор имитатора обнаружит подземный ход, склад боеприпасов или иной ценный объект, он может в тот же момент взорвать имитатор.
Следует иметь в виду, что имитатор легко выводится из строя обрывом кабеля, поэтому после сближения с противником следует искать цель для уничтожения ее взрывом, даже если это всего лишь одинокий боец. Иначе кабель перебьют и имитатор станет бесполезен. Впрочем, не совсем бесполезен - если этот объект скоро все же будет занят «нашими» войсками, то кабель можно соединить, боекомплект пополнить, и имитатор снова будет пригоден к использованию.
| название | год | авторы | номер документа |
|---|---|---|---|
| Боевой комплекс | 2017 |
|
RU2659178C1 |
| Антизасадное оружие | 2015 |
|
RU2623617C2 |
| Система залпового огня с индивидуальным наведением | 2017 |
|
RU2653426C1 |
| Штурмовик - 2 (варианты) | 2017 |
|
RU2655588C1 |
| Штурмовик /варианты/ | 2016 |
|
RU2623638C1 |
| КОМПЛЕКС ВЫСОКОТОЧНОГО ОРУЖИЯ /ВАРИАНТЫ/ | 2014 |
|
RU2557873C1 |
| УДОБНОЕ ОРУЖИЕ /ВАРИАНТЫ/ | 2013 |
|
RU2597743C2 |
| Боевой беспилотный самолёт /варианты/ | 2016 |
|
RU2622327C1 |
| Гранатомётная граната для поражения за препятствием | 2017 |
|
RU2655706C1 |
| Гранатомётная граната - 2 для поражения за препятствием (варианты) | 2017 |
|
RU2652023C1 |
Изобретение относится к боевому роботу и предназначено для уничтожения и демаскировки противника на поле боя. Боевой робот состоит из мобильного модуля, управляемого с помощью удаленного пульта управления, и содержит два электродвигателя постоянного тока высокого напряжения, содержит пистолет-пулемет, который всегда направлен вперед и имеет пружинную вертикальную подвеску, постоянно направленную горизонтально, имеющую возможность отклоняться вверх или вбок от действия отдачи пистолет-пулемета, и/или имеет огнемет. Достигается возможность обнаружения противника и его уничтожение. 6 з.п. ф-лы, 3 ил.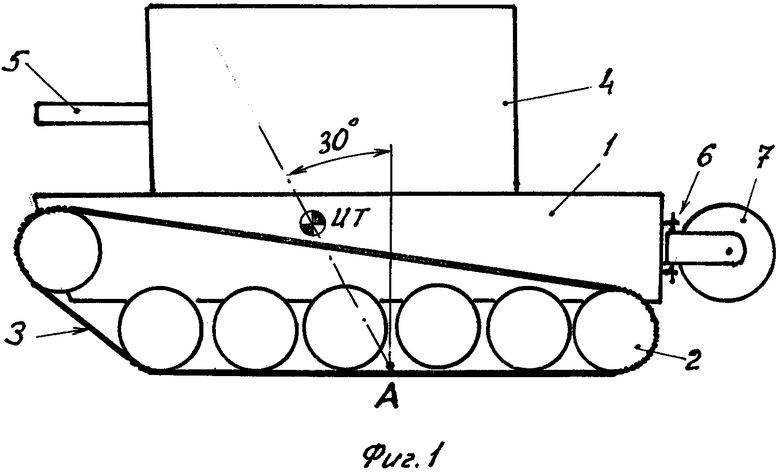
1. Боевой робот «имитатор», состоиящий из мобильного модуля, управляемого с помощью удаленного пульта управления, отличающийся тем, что содержит два электродвигателя постоянного тока высокого напряжения, содержит пистолет-пулемет, который всегда направлен вперед и имеет пружинную вертикальную подвеску, постоянно направленную горизонтально, имеющую возможность отклоняться вверх или вбок от действия отдачи пистолет-пулемета, и/или имеет огнемет.
2. Боевой робот «имитатор» по п. 1, отличающийся тем, что содержит заряд взрывчатого вещества.
3. Боевой робот «имитатор» по п.2, отличающийся тем, что содержит в удаленном пульте управления выпрямитель или аккумулятор с ключами коммутации левого и правого электродвигателей боевого робота «имитатора», с переключателями перемены полярности питания, соединенные тремя проводниками с боевым роботом «имитатором», и содержит электропривод пистолет-пулемета и заряда взрывчатого вещества, соединенный одним проводом с боевым роботом «имитатором», причем этот провод и средний провод электродвигателей соединены с пистолет-пулеметом и с зарядом взрывчатого вещества через две цепи с разнонаправленными диодами.
4. Боевой робот «имитатор» по п.3, отличающийся тем, что содержит в удаленном пульте управления два гальванически развязанных выпрямителя или два аккумулятора.
5. Боевой робот «имитатор» по п.1, отличающийся тем, что имеет сзади на вертикальном шарнире цилиндрическую или торцевую катушку с кабелем.
6. Боевой робот «имитатор» по п.1, отличающийся тем, что имеет тиристорные регуляторы мощности.
7. Боевой робот «имитатор» по п.3, отличающийся тем, что содержит блок питания, соединенный с переключателем полярности, соединенный двумя проводами с выключателями левого и правого двигателей, и далее - с левым и правым электродвигателями, а средняя точка переключателя полярности соединена с двумя электродвигателями и с двумя обратно включенными диодами, а через диоды, соответственно - с электромагнитом пистолет-пулемета и взрывателем, причем один из проводов с переключателя полярности через кнопку соединен с упомянутыми электромагнитом и взрывателем.
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Приспособление для выделки кирпичей с замкнутой со всех сторон полостью | 1925 |
|
SU1941A1 |
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |
| СССР | |||
| Водопроводный кран | 1925 |
|
SU1942A1 |
| Система гашения механических колебаний, передающихся от строительной части сооружений на комплектное электрооборудование и/или программно-технические комплексы атомных электростанций (АЭС) | 2019 |
|
RU2709273C1 |

